
車両の制御装置
【課題】車両の制御装置において、製造コストの増加や車両重量の増加を招くことなく車両における直進走行性の向上を可能とする。
【解決手段】ヨーレイトセンサ11が検出したヨーレイトに基づいてピーク周波数を特定するヨーレイトピーク周波数特定部21と、事前にベンチテストで求めた車両感度とピーク周波数に対応するヨーレイトと車速とに基づいて前後輪側に作用するヨーレイトの位相の偏差を算出するヨーレイト前後位相差算出部23と、ヨーレイト前後位相差が180度に近づくような目標車速を設定する目標車速算出部24とを設ける。
【解決手段】ヨーレイトセンサ11が検出したヨーレイトに基づいてピーク周波数を特定するヨーレイトピーク周波数特定部21と、事前にベンチテストで求めた車両感度とピーク周波数に対応するヨーレイトと車速とに基づいて前後輪側に作用するヨーレイトの位相の偏差を算出するヨーレイト前後位相差算出部23と、ヨーレイト前後位相差が180度に近づくような目標車速を設定する目標車速算出部24とを設ける。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の制御装置に関する。
【背景技術】
【0002】
走行する車両に対して路面や周囲環境などの外乱が作用した場合、一般的には、車両の操舵角制御やサスペンション制御などを実行して対処している。例えば、下記特許文献1に記載された前後輪操舵装置の制御方法では、ステアリングホイールを操舵することで前輪舵角及び後輪舵角を可能に構成し、車速及びステアリングホイールの操舵角に対応した目標ヨーレイト値を設定し、目標ヨーレイト値と車両に作用する実ヨーレイト値との偏差に基づいて前輪舵角をフィードバック制御すると共に、横滑り角が零となるように後輪舵角をフィードフォワード制御している。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平07−156819号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述した従来の車両の制御装置では、前輪だけでなく後輪を操舵する装置を追加しなければならず、製造コストの増加や車両重量の増加を招いてしまう。
【0005】
本発明は、上記の事情に鑑みてなされたものであって、製造コストの増加や車両重量の増加を招くことなく車両における直進走行性の向上を可能とする車両の制御装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の車両の制御装置は、車両を走行可能な動力源と、前記車両の左右方向における特有の応力発生形態に基づいて前輪側に作用する応力の位相と後輪側に作用する応力の位相との偏差を算出する前後輪位相差算出部と、前記前後輪位相差算出部が算出した偏差が180度に近づくような目標車速を設定する目標車速設定部と、前記目標車速設定部が設定した目標車速となるように前記動力源を制御する動力源制御部と、を備えることを特徴とする。
【0007】
上記車両の制御装置にて、走行する前記車両に作用する左右方向の応力がドライバの運転操作により発生したものであるかを判定する応力判定部を設け、該応力判定部がドライバの運転操作により車両の左右方向の応力が発生したものであると判定したとき、前記動力源制御部は、現在の車速が維持されるように前記動力源を制御することが好ましい。
【0008】
上記車両の制御装置にて、走行する前記車両の左右方向の応力を検出する左右方向応力検出部を設け、前記前後輪位相差算出部は、前記左右方向応力検出部が検出した左右方向の応力に基づいて前輪側に作用する応力の位相と後輪側に作用する応力の位相との偏差を算出することが好ましい。
【0009】
上記車両の制御装置にて、前記目標車速設定部は、現在の車速との偏差が予め設定された制限値内で、前記前後輪位相差算出部が算出した偏差が180度に近づくような目標車速を設定することが好ましい。
【発明の効果】
【0010】
本発明に係る車両の制御装置によれば、車両の左右方向における特有の応力発生形態に基づいて前輪側に作用する応力の位相と後輪側に作用する応力の位相との偏差を算出し、算出した偏差が180度に近づくような目標車速を設定して動力源を制御するので、製造コストの増加や車両重量の増加を招くことなく、車両における直進走行性を向上することができるという効果を奏する。
【図面の簡単な説明】
【0011】
【図1】図1は、本発明の実施形態1に係る車両の制御装置を表す概略構成図である。
【図2】図2は、実施形態1の車両の制御装置における車速制御の処理を表すフローチャートである。
【図3】図3は、前後車輪に対する逆相入力を説明するための概略図である。
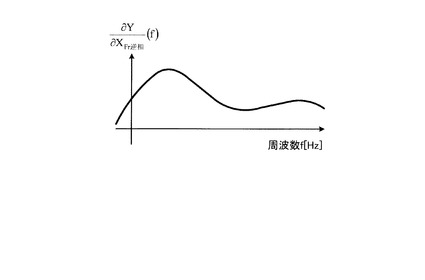
【図4】図4は、前輪逆位相入力[変位]に対する発生ヨーレイト[角度/時間]の関数を示す伝達関数を表すグラフである。
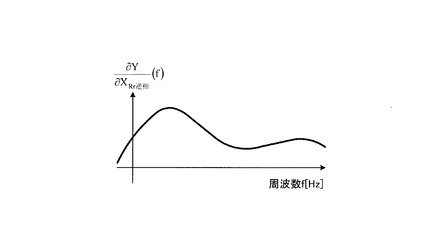
【図5】図5は、後輪逆位相入力[変位]に対する発生ヨーレイト[角度/時間]の関数を示す伝達関数を表すグラフである。
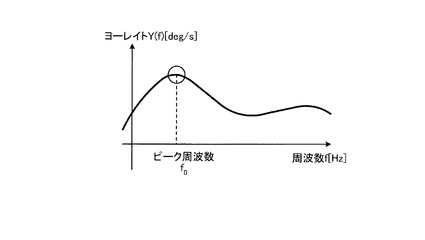
【図6】図6は、ランダム路を走行する車両にて計測されたヨーレイトをFFTしたグラフである。
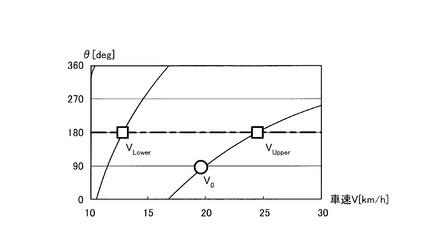
【図7】図7は、現在の車速と目標車速における各ヨーレイトの位相を表すグラフである。
【図8】図8は、現在の車速を第1目標車速に補正するときのヨーレイトの位相変位を表すグラフである。
【図9】図9は、現在の車速を第2目標車速に補正するときのヨーレイトの位相変位を表すグラフである。
【図10】図10は、現在の車速を制限値外の目標車速に補正するときのヨーレイトの位相変位を表すグラフである。
【図11】図11は、現在の車速を制限値内の目標車速に補正するときのヨーレイトの位相変位を表すグラフである。
【図12】図12は、本発明の実施形態2に係る車両の制御装置における車速制御の処理を表すフローチャートである。
【図13】図13は、前輪逆位相入力[変位]に対する発生ヨーレイト[角度/時間]の関数を示す伝達関数を表すグラフである。
【図14】図14は、後輪逆位相入力[変位]に対する発生ヨーレイト[角度/時間]の関数を示す伝達関数を表すグラフである。
【図15】図15は、本発明の実施形態3に係る車両の制御装置を表す概略構成図である。
【図16】図16は、現在の車速を第1目標車速に補正するときの横加速度の位相変位を表すグラフである。
【図17】図17は、現在の車速を第2目標車速に補正するときの横加速度の位相変位を表すグラフである。
【発明を実施するための形態】
【0012】
以下に、本発明に係る車両の制御装置の実施形態を図面に基づいて詳細に説明する。なお、この実施形態によりこの発明が限定されるものではなく、また、実施形態が複数ある場合には、各実施形態を組み合わせて構成するものも含むものである。
【0013】
〔実施形態1〕
図1は、本発明の実施形態1に係る車両の制御装置を表す概略構成図、図2は、実施形態1の車両の制御装置における車速制御の処理を表すフローチャート、図3は、前後車輪に対する逆相入力を説明するための概略図、図4は、前輪逆位相入力[変位]に対する発生ヨーレイト[角度/時間]の関数を示す伝達関数を表すグラフ、図5は、後輪逆位相入力[変位]に対する発生ヨーレイト[角度/時間]の関数を示す伝達関数を表すグラフ、図6は、ランダム路を走行する車両にて計測されたヨーレイトをFFTしたグラフ、図7は、現在の車速と目標車速における各ヨーレイトの位相を表すグラフ、図8は、現在の車速を第1目標車速に補正するときのヨーレイトの位相変位を表すグラフ、図9は、現在の車速を第2目標車速に補正するときのヨーレイトの位相変位を表すグラフ、図10は、現在の車速を制限値外の目標車速に補正するときのヨーレイトの位相変位を表すグラフ、図11は、現在の車速を制限値内の目標車速に補正するときのヨーレイトの位相変位を表すグラフである。
【0014】
実施形態1の車両は、図示しないが、4つの車輪(前輪及び後輪)を有しており、ステアリングにより2つの前輪を操舵可能となっている。なお、ステアリングにより4つの車輪を操舵可能としてもよい。また、この車両は、内燃機関としてガソリンエンジンまたはディーゼルエンジン(以下、エンジンと称する。)が搭載され、エンジンの駆動力が変速機からアウトプットシャフト、リヤデファレンシャル、ドライブシャフトを介して各後輪に伝達可能となっている。なお、エンジンの駆動力が変速機からフロントデファレンシャル、ドライブシャフトを介して2つの前輪に伝達可能としてもよい。
【0015】
また、エンジンは、電子制御ユニット(ECU)により制御可能となっている。即ち、ECUは、検出された吸入空気量、アクセル開度、スロットル開度、エンジン回転数などに基づいてインジェクタによる燃料噴射量や燃料噴射時期、点火プラグによる点火時期などを設定し、エンジンの出力を制御している。
【0016】
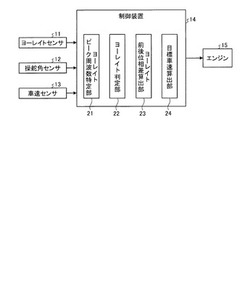
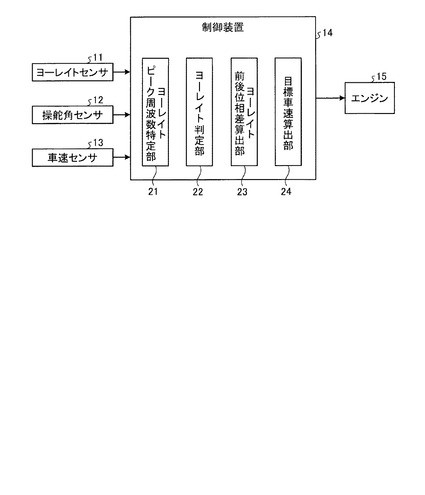
実施形態1の車両の制御装置は、図1に示すように、ヨーレイトセンサ11と、操舵角センサ12と、車速センサ13と、制御装置(ECU)14と、エンジン15とから構成されている。即ち、制御装置14は、ヨーレイトセンサ11と操舵角センサ12と車速センサ13の検出結果に基づいてエンジン15の出力を制御する。
【0017】
そして、制御装置14は、ヨーレイトピーク周波数特定部21と、ヨーレイト判定部22と、ヨーレイト前後位相差算出部23と、目標車速算出部24とを有している。
【0018】
即ち、ヨーレイトセンサ11は、走行する車両の左右方向の応力、つまり、ヨーレイト(車両の旋回方向への回転角の変化する速度)を検出する本発明の左右方向応力検出部として機能し、ヨーレイトピーク周波数特定部21は、ヨーレイトセンサ11が検出したヨーレイトに基づいてこのヨーレイトが最大となるピーク周波数を特定する。ヨーレイト判定部22は、走行する車両に発生したヨーレイトがドライバの運転操作により発生したものであるか、周囲環境や路面環境などの車両走行環境により発生したものであるかを判定する本発明の応力判定部として機能する。この場合、ヨーレイト判定部22は、ヨーレイトセンサ11が検出したヨーレイトと、操舵角センサ12が検出した操舵角との関連性からこれを判定する。
【0019】
そして、車両に発生したヨーレイトがドライバの運転操作により発生したものであると判定されたら、以下に説明する制御を実行せずに、現在の車速が維持されるようにエンジン15を制御する。一方、車両に発生したヨーレイトが車両走行環境により発生したものであると判定されたら、以下に説明する制御を実行してエンジン15を制御する。
【0020】
ヨーレイト前後位相差算出部23は、車両に作用する特有のヨーレイト(応力発生形態)と、ヨーレイトセンサ11が検出したヨーレイトとに基づいて前輪側に作用するヨーレイトの位相と後輪側に作用するヨーレイトの位相との偏差を算出する本発明の前後輪位相差算出部として機能する。即ち、ヨーレイト前後位相差算出部23は、事前に車両のベンチテストで取得した車両感度(ヨーレイト/路面入力)と、ヨーレイトピーク周波数特定部21が特定したヨーレイトが最大となるピーク周波数と、車速センサ13が検出した現在の車速とに基づいてヨーレイトを前輪側に寄与する分と後輪側に寄与する分とに分離する。そして、ヨーレイト前後位相差算出部23は、前輪側に寄与するヨーレイトの位相と後輪側に寄与するヨーレイトの位相との偏差、つまり、ヨーレイト前後位相差を算出する。
【0021】
目標車速算出部24は、ヨーレイト前後位相差算出部23が算出したヨーレイト前後位相差が180度に近づくような目標車速を設定する本発明の目標車速設定部として機能する。即ち、目標車速算出部24は、前輪側に寄与するヨーレイトの位相と後輪側に寄与するヨーレイトの位相とが逆になって互いに打ち消すような目標車速を設定する。
【0022】
この場合、目標車速算出部24は、ヨーレイト前後位相差算出部23が算出したヨーレイト前後位相差が180度となる目標車速を設定することが望ましい。但し、現在の車速と、ヨーレイト前後位相差が180度となる目標車速との偏差が大きいときには、ドライバに違和感を与えてしまう。そのため、目標車速算出部24は、現在の車速との偏差が予め設定された制限値内で、ヨーレイト前後位相差が180度に近づくような目標車速を設定する。
【0023】
その後、制御装置14は、目標車速算出部24が設定した目標車速となるようにエンジン15を制御する本発明の動力源制御部として機能する。この場合、制御装置14は、スロットル開度、エンジン回転数、燃料噴射量、燃料噴射時期、点火時期などを補正することで、エンジン15の出力を調整し、現在の車速が目標車速となるように車速制御を行う。
【0024】
ここで、実施形態1の車両の制御装置による車速制御の処理について、図2のフローチャートに基づいて詳細に説明する。
【0025】
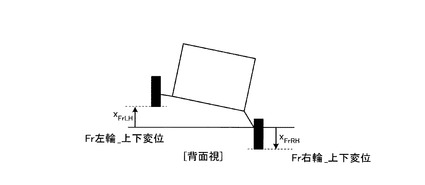
実施形態1の車両の制御装置による車速制御において、事前に、車両のベンチテストにより車両の前輪及び後輪における車両感度(ヨーレイト/路面入力)を取得しておく。即ち、図3に示すように、車両の前輪側で考えると、路面から車両に対して入力があったとき、左右の前輪ではその上下変位量が異なる。そのため、下記数式1、数式2に表すように、時間軸に対する前輪における逆相入力変位量xFr(t)と、時間軸に対する後輪における逆相入力変位量xRr(t)とを求めておく。ここで、xFrLH(t)とxFrRH(t)は、左右の前輪の上下変位量であり、xRrLH(t),xRrRH(t)は、左右の後輪の上下変位量である。
【0026】
【数1】

【数2】
【0027】
そして、この時間軸に対する前輪における逆相入力変位量xFr(t)と、時間軸に対する後輪における逆相入力変位量xRr(t)とをFFT(高速フーリエ変換)処理を行うことで、周波数軸に対する前輪における逆相入力変位量XFr(f)と、周波数軸に対する後輪における逆相入力変位量XRr(f)を算出する。そして、下記数式3、数式4に表すように、車両の前輪及び後輪における車両感度(ヨーレイト/路面入力)として、(∂Y/∂XFr)(f)と(∂Y/∂XRr)(f)を算出する。
【0028】
【数3】
【数4】
【0029】
この車両の前輪及び後輪における車両感度(ヨーレイト/路面入力)としての(∂Y/∂XFr)(f)と(∂Y/∂XRr)(f)は、図4及び図5のグラフとしてマップ化され、制御装置14が記憶している。
【0030】
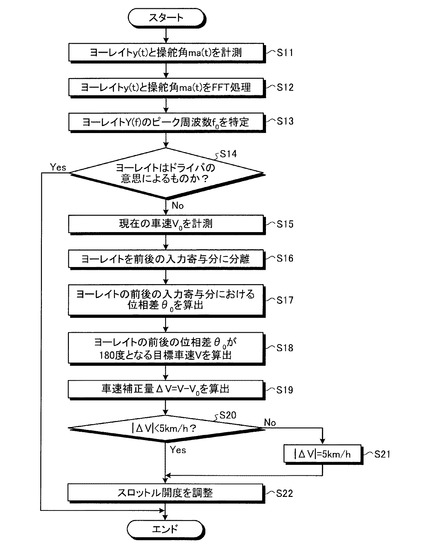
このように事前準備がなされた状態で、実施形態1の車両の制御装置による車速制御が実行される。図2に示すように、ステップS11にて、ヨーレイトセンサ11は、走行する車両に発生するヨーレイトy(t)を検出すると共に、操舵角センサ12は、走行する車両の操舵角ma(t)を検出する。ステップS12にて、制御装置14は、検出したヨーレイトy(t)と操舵角ma(t)に対してFFT処理を行い、周波数に対するヨーレイトY(f)と操舵角Ma(f)を算出する。
【0031】
ステップS13にて、制御装置14のヨーレイトピーク周波数特定部21は、図6に示すように、周波数に対するヨーレイトY(f)に対して、このヨーレイトY(f)が最大となるピーク周波数f0を特定する。ステップS14にて、ヨーレイト判定部22は、この走行する車両に発生したヨーレイトがドライバの運転操作、つまり、ステアリング操舵により発生したものであるかどうかを判定する。即ち、ヨーレイト判定部22は、ピーク周波数f0におけるヨーレイトY(f0)と操舵角Ma(f0)の関連性から、下記数式5によりこれを判定する。
【0032】
【数5】
【0033】
ここで、関連度関数γ2(f0)が判断値0.6より大きければ、ヨーレイトがドライバの運転操作により発生したものであると判定され、何もしないでこのルーチンを抜ける。つまり、制御装置14は、現在の車速が維持されるようにエンジン15を制御する。一方、関連度関数γ2(f0)が判断値0.6以下であれば、ヨーレイトが車両走行環境により発生したものであると判定され、ステップS15に移行する。
【0034】
ステップS15にて、車速センサ13は、現在走行している車両の速度(車速)V0を検出する。そして、ステップS16にて、ヨーレイト前後位相差算出部23は、ピーク周波数f0におけるヨーレイトY(f0)を、事前に求めた車両の前輪及び後輪における車両感度(ヨーレイト/路面入力)としての(∂Y/∂XFr)(f)と(∂Y/∂XRr)(f)を用いて算出し、現在の車速V0と車両のホイールベースWBを用いてヨーレイトY(f0)を前輪側に寄与する分と後輪側に寄与する分とに分離する。
【0035】
即ち、走行する車両に作用するヨーレイトY(f0)は、下記数式6により規定される。ここで、XFr(f0)とXRr(f0)は、現在の周波数軸に対する前輪及び後輪における逆相入力変位量である。
【0036】
【数6】
【0037】
ここで、現在の車速V0、車両のホイールベースWBとすると、前輪が通過したある地点を後輪が通過するのに遅れ時間τ0=WB/Vが発生する。即ち、後輪における逆相入力変位量XRr(f0)は、前輪における逆相入力変位量XFr(f0)に対して、遅れ時間τ0が発生することから、時間軸で数式7が設定され、周波数軸で数式8が設定される。ここで、eは、自然対数、jは、虚数単位、ω0は、角周波数である。
【0038】
【数7】
【数8】
【0039】
そして、数式8を数式6に代入することで、下記数式9を得ることができる。ここで、数式9の括弧内の項だけを抜き出した数式10に表すように、この数式10が車両感度項であり、この車両感度項にて、前項が前輪に寄与するヨーレイトの位相であり、後項が後輪に寄与するヨーレイトの位相である。
【0040】
【数9】
【数10】
【0041】
ステップS17にて、ヨーレイト前後位相差算出部23は、前輪側に寄与するヨーレイトの位相と後輪側に寄与するヨーレイトの位相との偏差、つまり、ヨーレイト前後位相差θ0を算出する。つまり、数式10にて、前項である前輪に寄与するヨーレイトの位相から、後項である後輪に寄与するヨーレイトの位相を減算することで、ヨーレイト前後位相差θ0を求めることができる。
【0042】
ステップS18にて、目標車速算出部24は、ヨーレイト前後位相差θ0が180度になる目標車速Vを設定する。即ち、現在の車速V0、ヨーレイト前後位相差θ0である車両の走行状態から、目標車速Vに変更したときのヨーレイト前後位相差θを下記数式11により求めることができる。
【0043】
【数11】
【0044】
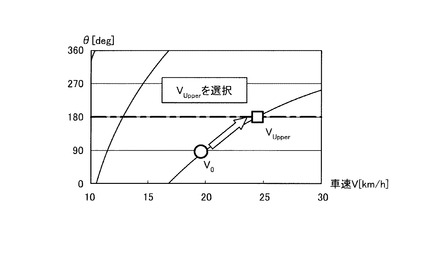
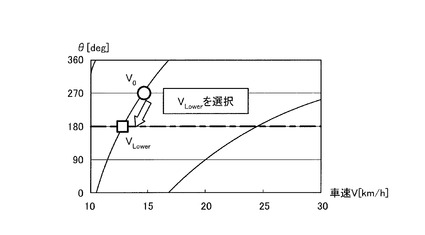
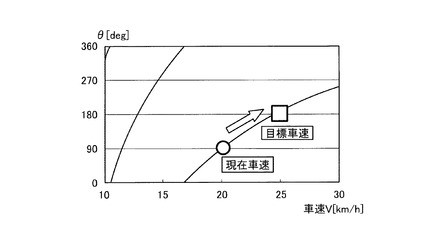
そして、この数式11から、ヨーレイト前後位相差θが180度となる目標車速Vは、図7に示すように、目標車速VUpperと目標車速VLowerの2通りが存在する。つまり、前輪側に寄与するヨーレイトの位相と後輪側に寄与するヨーレイトの位相は、現在の車速V0で、周波数軸方向にヨーレイト前後位相差θ0だけずれていることから、現在の車速V0を、高速側の第1目標車速VUpperに変更する方法と、低速側の第2目標車速VLowerに変更する方法がある。
【0045】
即ち、図8に示すように、現在の車速V0を高速側の第1目標車速VUpperに変更すると、車速が上昇することとなる。一方、図9に示すように、現在の車速V0を低速側の第2目標車速VLowerに変更すると、車速が低下することとなる。現在の車速V0を第1目標車速VUpperまたは第2目標車速VLowerに変更する条件としては、ヨーレイト前後位相差θ0が0度より大きく、且つ、180度より小さければ、第1目標車速VUpperに変更し、ヨーレイト前後位相差θ0が180度より大きく、且つ、360度より小さければ、第2目標車速VLowerに変更するとよい。
【0046】
ステップS19にて、現在の車速V0を目標車速V(第1目標車速VUpperまたは第2目標車速VLower)に変更したときの車速補正量ΔVを算出する。ステップS20にて、この車速補正量ΔVが制限値である5km/hより小さいかどうかを判定する。ここで、車速補正量ΔVが制限値である5km/hより小さいと判定されたら、ステップS22に直接移行し、車速補正量ΔVが制限値である5km/h以上であると判定されたら、ステップS21にて、車速補正量ΔVを5km/hに変更した後、ステップS22に移行する。
【0047】
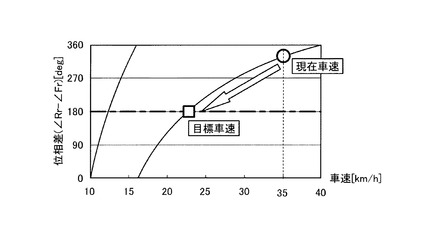
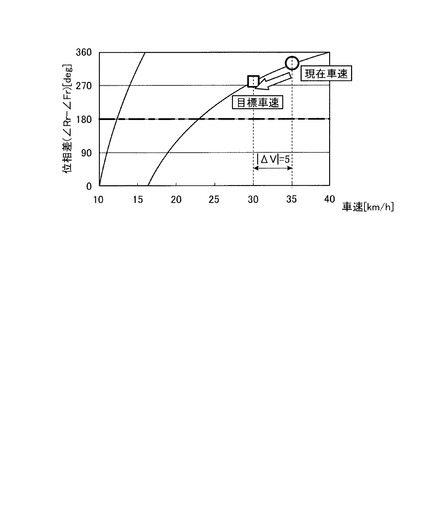
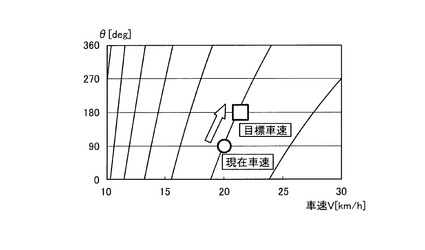
即ち、目標車速算出部24は、ヨーレイト前後位相差算出部23が算出したヨーレイト前後位相差が180度となる目標車速Vを設定することが望ましい。しかし、図10に示すように、現在の車速V0を目標車速Vに変更するときの車速補正量ΔVが制限値である5km/hより大きくなると、例えば、現在の車速V0から目標車速Vへ大きく低下することとなり、ドライバに違和感を与えてしまう。そのため、目標車速算出部24は、現在の車速V0を目標車速Vに変更するときの車速補正量ΔVが制限値である5km/hより大きくなったら、図11に示すように、車速補正量ΔVを制限値である5km/hとし、目標車速Vを補正する。この場合、ヨーレイト前後位相差が180度となる目標車速Vとはならないものの、ヨーレイト前後位相差が180度に近づくような目標車速を設定する。
【0048】
その後、ステップS22にて、制御装置14は、目標車速算出部24が設定した目標車速Vとなるように、エンジン15を制御する。具体的に、制御装置14は、スロットル開度を調整(増減)することで、エンジン15の出力を調整し、現在の車速V0が目標車速Vとなるように車速制御を行う。
【0049】
このようにヨーレイト前後位相差θ0が180度になる(また、近づく)目標車速Vを設定し、エンジン15の出力を調整することで、前輪に寄与するヨーレイトの位相と後輪に寄与するヨーレイトの位相が全くの逆位相となり、互いのヨーレイトが打ち消すことで、走行する車両に対して路面状況などの外乱により発生するヨーレイトが低減される。
【0050】
このように実施形態1の車両の制御装置によれば、ヨーレイトセンサ11が検出したヨーレイトに基づいてピーク周波数を特定するヨーレイトピーク周波数特定部21と、事前にベンチテストで求めた車両感度とピーク周波数に対応するヨーレイトと車速とに基づいて前後輪側に作用するヨーレイトの位相の偏差を算出するヨーレイト前後位相差算出部23と、ヨーレイト前後位相差が180度に近づくような目標車速を設定する目標車速算出部24とを設けている。
【0051】
従って、前輪側逆位相入力[変位]による発生ヨーレイトの位相と後輪側逆位相入力[変位]による発生ヨーレイトの位相の偏差、つまり、ヨーレイト前後位相差が180度に近づくような目標車速を設定するため、現在の車速をこの目標車速に補正するだけで、前輪側のヨーレイトの位相と後輪側のヨーレイトの位相とが互いに打ち消しあい、路面状況などの周囲環境から車両に作用するヨーレイトを適正に低減することが可能となり、別途装置などを搭載することなく、車両における直進走行安定性を向上することができ、製造コストの増加や車両重量の増加も抑制することができる。
【0052】
また、実施形態1の車両の制御装置では、走行する車両に発生したヨーレイトがドライバの運転操作により発生したものであるか、または、周囲環境により発生したものであるかを判定するヨーレイト判定部22を設け、ヨーレイトがドライバの運転操作により発生したものであると判定されたら、現在の車速が維持されるようにエンジン15を制御する。この場合、ヨーレイト判定部22は、ヨーレイトセンサ11が検出したヨーレイトと、操舵角センサ12が検出した操舵角との関連性からこれを判定している。従って、ヨーレイトがドライバの運転操作により発生したものであるか、周囲環境により発生したものであるかを適正に判定することで、ドライバの運転操作によりヨーレイトが発生したときには、ヨーレイトを抑制する制御を行わないため、ドライバに対する違和感の発生を防止することができる。
【0053】
また、実施形態1の車両の制御装置では、ベンチテストで求めた車両感度と現在発生しているヨーレイトと車速とから前後輪側に作用するヨーレイトの位相の偏差を算出している。従って、ヨーレイト前後位相差を短時間で高精度に算出することが可能となり、車両における直進走行安定性を適正に向上することができる。
【0054】
また、実施形態1の車両の制御装置では、目標車速算出部24は、現在の車速とヨーレイト前後位相差が180度となる目標車速との偏差が、予め設定された制限値内で、ヨーレイト前後位相差が180度に近づくような目標車速を設定している。従って、現在の車速から目標車速への補正によりドライバに違和感を与えることが軽減され、ドライバビリティの低下を抑制することができる。
【0055】
〔実施形態2〕
図12は、本発明の実施形態2に係る車両の制御装置における車速制御の処理を表すフローチャート、図13は、前輪逆位相入力[変位]に対する発生ヨーレイト[角度/時間]の関数を示す伝達関数を表すグラフ、図14は、後輪逆位相入力[変位]に対する発生ヨーレイト[角度/時間]の関数を示す伝達関数を表すグラフである。なお、本実施形態の車両の制御装置の基本的な構成は、上述した実施形態1とほぼ同様の構成であり、図1を用いて説明すると共に、上述した実施形態と同様の機能を有する部材には、同一の符号を付して詳細な説明は省略する。
【0056】
実施形態2の車両の制御装置は、図1に示すように、操舵角センサ12と、車速センサ13と、制御装置(ECU)14と、エンジン15とから構成され、制御装置14は、操舵角センサ12と車速センサ13の検出結果に基づいてエンジン15の出力を制御しており、実施形態2の車両の制御装置は、実施形態1の車両の制御装置のように、ヨーレイトセンサ11を用いてはいない。
【0057】
そして、制御装置14は、ヨーレイト判定部22と、ヨーレイト前後位相差算出部23と、目標車速算出部24とを有し、ヨーレイトピーク周波数特定部21はない。
【0058】
即ち、ヨーレイト判定部22は、走行する車両に発生したヨーレイトがドライバの運転操作により発生したものであるか、周囲環境や路面環境などの車両走行環境により発生したものであるかを判定する本発明の応力判定部として機能する。この場合、ヨーレイト判定部22は、操舵角センサ12が検出した操舵角からこれを判定する。
【0059】
そして、車両に発生したヨーレイトがドライバの運転操作により発生したものであると判定されたら、以下に説明する制御を実行せずに、現在の車速が維持されるようにエンジン15を制御する。一方、車両に発生したヨーレイトが車両走行環境により発生したものであると判定されたら、以下に説明する制御を実行してエンジン15を制御する。
【0060】
ヨーレイト前後位相差算出部23は、車両に作用する特有のヨーレイト(応力発生形態)に基づいて前輪側に作用するヨーレイトの位相と後輪側に作用するヨーレイトの位相との偏差を算出する本発明の前後輪位相差算出部として機能する。即ち、ヨーレイト前後位相差算出部23は、事前に車両のベンチテストで取得した車両感度(ヨーレイト/路面入力)と、この車両感度から求めた車両固有のヨーレイト共振周波数と、車速センサ13が検出した現在の車速とに基づいてヨーレイトを前輪側に寄与する分と後輪側に寄与する分とに分離する。そして、ヨーレイト前後位相差算出部23は、前輪側に寄与するヨーレイトの位相と後輪側に寄与するヨーレイトの位相との偏差、つまり、ヨーレイト前後位相差を算出する。
【0061】
ここで、実施形態2の車両の制御装置による車速制御の処理について、図12のフローチャートに基づいて詳細に説明する。
【0062】
実施形態2の車両の制御装置による車速制御において、事前に、実施形態1と同様に、車両のベンチテストにより車両の前輪及び後輪における車両感度(ヨーレイト/路面入力)を取得しておく。即ち、実施形態1に用いた数式1、数式2のように、時間軸に対する前輪における逆相入力変位量xFr(t)と、時間軸に対する後輪における逆相入力変位量xRr(t)とを求めておく。
【0063】
そして、この時間軸に対する前輪における逆相入力変位量xFr(t)と、時間軸に対する後輪における逆相入力変位量xRr(t)とをFFT(高速フーリエ変換)処理を行うことで、周波数軸に対する前輪における逆相入力変位量∂XFr(f)と、周波数軸に対する後輪における逆相入力変位量∂XRr(f)を算出し、実施形態1に用いた数式3、数式4のように、車両の前輪及び後輪における車両感度(ヨーレイト/路面入力)として、(∂Y/∂XFr)(f)と(∂Y/∂XRr)(f)を算出する。
【0064】
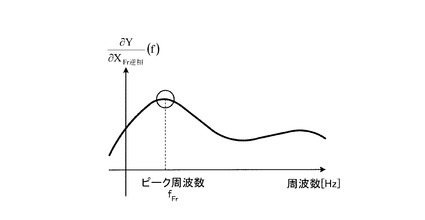
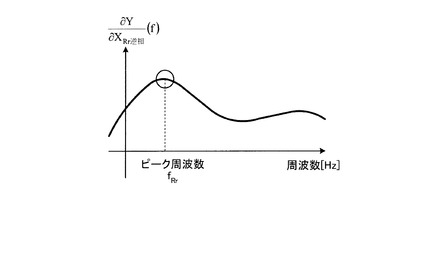
この車両の前輪及び後輪における車両感度(ヨーレイト/路面入力)としての(∂Y/∂XFr)(f)と(∂Y/∂XRr)(f)は、図13及び図14のグラフとしてマップ化され、制御装置14が記憶している。そして、このベンチテストで求めた車両感度(ヨーレイト/路面入力)としてのマップ化にて、周波数に対する車両感度(∂Y/∂XFr)(f)、(∂Y/∂XRr)(f)が最大となるピーク周波数fFr、fRrを特定する。一般的に、車両の構造(サスペンション構造など)は、前後が大きく変わらないことから、ピーク周波数fFr、fRrは同程度になると考えられる。従って、数式12に表すように、このピーク周波数fFr、fRrの平均値を車両固有のヨーレイト共振周波数f0として定義する。
【0065】
【数12】
【0066】
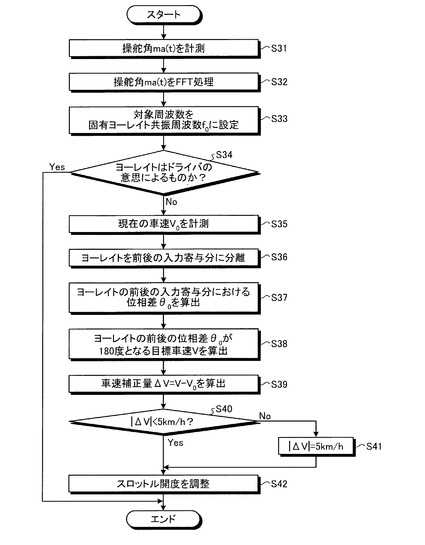
このように事前準備がなされた状態で、実施形態2の車両の制御装置による車速制御が実行される。図12に示すように、ステップS31にて、操舵角センサ12は、走行する車両の操舵角ma(t)を検出する。ステップS32にて、制御装置14は、検出した操舵角ma(t)に対してFFT処理を行い、周波数に対する操舵角Ma(f)を算出する。
【0067】
ステップS33にて、前述したように、ベンチテストで求めた車両感度(ヨーレイト/路面入力)(∂Y/∂XFr)(f)、(∂Y/∂XRr)(f)が最大となるピーク周波数fFr、fRrの平均値を車両固有のヨーレイト共振周波数f0として特定する。ステップS34にて、ヨーレイト判定部22は、走行する車両に発生したヨーレイトがドライバの運転操作、つまり、ステアリング操舵により発生したものであるかどうかを判定する。即ち、ヨーレイト判定部22は、操舵角Ma(f0)に基づいて、下記数式13によりこれを判定する。
【0068】
【数13】
【0069】
ここで、操舵角Ma(f0)の絶対値が判断操舵角度10度以上であれば、ヨーレイトがドライバの運転操作により発生したものであると判定され、何もしないでこのルーチンを抜ける。つまり、制御装置14は、現在の車速が維持されるようにエンジン15を制御する。一方、操舵角Ma(f0)の絶対値が判断操舵角度10度より小さければ、ヨーレイトが車両走行環境により発生したものであると判定され、ステップS35に移行する。
【0070】
なお、以下のステップS35からS42の処理は、実施形態1のステップS15からS22の処理とほぼ同様である。即ち、ステップS35にて、車速センサ13は、現在走行している車両の速度(車速)V0を検出する。そして、ステップS36にて、ヨーレイト前後位相差算出部23は、車両固有のヨーレイト共振周波数f0におけるヨーレイトY(f0)を、事前に求めた車両の前輪及び後輪における車両感度(ヨーレイト/路面入力)としての(∂Y/∂XFr)(f)と(∂Y/∂XRr)(f)を用いて算出し、現在の車速V0と車両のホイールベースWBを用いてヨーレイトY(f0)を前輪側に寄与する分と後輪側に寄与する分とに分離する。
【0071】
ステップS37にて、ヨーレイト前後位相差算出部23は、前輪側に寄与するヨーレイトの位相と後輪側に寄与するヨーレイトの位相との偏差、つまり、ヨーレイト前後位相差θ0を算出する。ステップS38にて、目標車速算出部24は、ヨーレイト前後位相差θ0が180度になる目標車速Vを設定する。
【0072】
ステップS39にて、現在の車速V0を目標車速Vに変更したときの車速補正量ΔVを算出する。ステップS40にて、この車速補正量ΔVが制限値である5km/hより小さいかどうかを判定する。ここで、車速補正量ΔVが制限値である5km/hより小さいと判定されたら、ステップS42に直接移行し、車速補正量ΔVが制限値である5km/h以上であると判定されたら、ステップS41にて、車速補正量ΔVを5km/hに変更した後、ステップS42に移行する。
【0073】
その後、ステップS42にて、制御装置14は、目標車速算出部24が設定した目標車速Vとなるように、エンジン15を制御する。具体的に、制御装置14は、スロットル開度を調整(増減)することで、エンジン15の出力を調整し、現在の車速V0が目標車速Vとなるように車速制御を行う。
【0074】
このようにヨーレイト前後位相差θ0が180度になる(また、近づく)目標車速Vを設定し、エンジン15の出力を調整することで、前輪に寄与するヨーレイトの位相と後輪に寄与するヨーレイトの位相が全くの逆位相となり、互いのヨーレイトが打ち消すことで、走行する車両に対して路面状況などの外乱により発生するヨーレイトが低減される。
【0075】
このように実施形態2の車両の制御装置によれば、事前にベンチテストで求めた車両感度(ヨーレイト/路面入力)が最大となる前後輪のピーク周波数の平均値を車両固有のヨーレイト共振周波数として特定し、この車両固有のヨーレイト共振周波数に対応するヨーレイトと車速とに基づいて前後輪側に作用するヨーレイトの位相の偏差を算出するヨーレイト前後位相差算出部23と、ヨーレイト前後位相差が180度に近づくような目標車速を設定する目標車速算出部24とを設けている。
【0076】
従って、前輪側のヨーレイトの位相と後輪側のヨーレイトの位相の偏差、つまり、ヨーレイト前後位相差が180度に近づくような目標車速を設定するため、現在の車速をこの目標車速に補正するだけで、前輪側のヨーレイトの位相と後輪側のヨーレイトの位相とが互いに打ち消しあい、路面状況などの周囲環境から車両に作用するヨーレイトを適正に低減することが可能となり、別途装置などを搭載することなく、車両における直進走行安定性を向上することができ、製造コストの増加や車両重量の増加も抑制することができる。
【0077】
〔実施形態3〕
図15は、本発明の実施形態3に係る車両の制御装置を表す概略構成図、図16は、現在の車速を第1目標車速に補正するときの横加速度の位相変位を表すグラフ、図17は、現在の車速を第2目標車速に補正するときの横加速度の位相変位を表すグラフである。なお、上述した実施形態と同様の機能を有する部材には、同一の符号を付して詳細な説明は省略する。
【0078】
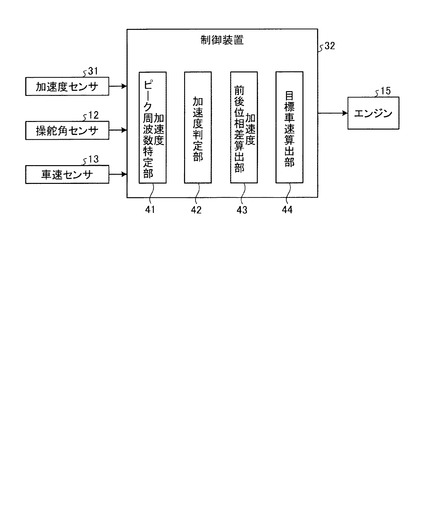
実施形態3の車両の制御装置は、図15に示すように、加速度センサ31と、操舵角センサ12と、車速センサ13と、制御装置(ECU)32と、エンジン15とから構成されている。即ち、制御装置32は、加速度センサ31と操舵角センサ12と車速センサ13の検出結果に基づいてエンジン15の出力を制御する。
【0079】
そして、制御装置32は、加速度ピーク周波数特定部41と、加速度判定部42と、加速度前後位相差算出部43と、目標車速算出部44とを有している。
【0080】
即ち、加速度センサ31は、走行する車両の左右方向の応力、つまり、横加速度(車両の左右方向へ移動する加速度)を検出する本発明の左右方向応力検出部として機能し、加速度ピーク周波数特定部41は、加速度センサ31が検出した横加速度に基づいてこの横加速度が最大となるピーク周波数を特定する。加速度判定部42は、走行する車両に発生した横加速度がドライバの運転操作により発生したものであるか、周囲環境や路面環境などの車両走行環境により発生したものであるかを判定する本発明の応力判定部として機能する。この場合、加速度判定部42は、加速度センサ31が検出した横加速度と、操舵角センサ12が検出した操舵角との関連性からこれを判定する。
【0081】
そして、車両に発生した横加速度がドライバの運転操作により発生したものであると判定されたら、以下に説明する制御を実行せずに、現在の車速が維持されるようにエンジン15を制御する。一方、車両に発生した横加速度が車両走行環境により発生したものであると判定されたら、以下に説明する制御を実行してエンジン15を制御する。
【0082】
加速度前後位相差算出部43は、車両に作用する特有の横加速度(応力発生形態)と、加速度センサ31が検出した横加速度とに基づいて前輪側に作用する加速度の位相と後輪側に作用する加速度の位相との偏差を算出する本発明の前後輪位相差算出部として機能する。即ち、加速度前後位相差算出部43は、事前に車両のベンチテストで取得した車両感度(横加速度/路面入力)と、加速度ピーク周波数特定部41が特定した横加速度が最大となるピーク周波数と、車速センサ13が検出した現在の車速とに基づいて横加速度を前輪側に寄与する分と後輪側に寄与する分とに分離する。そして、加速度前後位相差算出部43は、前輪側に寄与する横加速度の位相と後輪側に寄与する横加速度の位相との偏差、つまり、横加速度前後位相差を算出する。
【0083】
目標車速算出部44は、加速度前後位相差算出部43が算出した横加速度前後位相差が180度に近づくような目標車速を設定する本発明の目標車速設定部として機能する。即ち、目標車速算出部44は、前輪側に寄与する横加速度の位相と後輪側に寄与する横加速度の位相とが逆になって互いに打ち消すような目標車速を設定する。
【0084】
この場合、目標車速算出部44は、加速度前後位相差算出部43が算出した横加速度前後位相差が180度となる目標車速を設定することが望ましい。但し、現在の車速と、横加速度前後位相差が180度となる目標車速との偏差が大きいときには、ドライバに違和感を与えてしまう。そのため、目標車速算出部44は、現在の車速との偏差が予め設定された制限値内で、横加速度前後位相差が180度に近づくような目標車速を設定する。
【0085】
その後、制御装置32は、目標車速算出部44が設定した目標車速となるようにエンジン15を制御する本発明の動力源制御部として機能する。この場合、制御装置32は、スロットル開度、エンジン回転数、燃料噴射量、燃料噴射時期、点火時期などを補正することで、エンジン15の出力を調整し、現在の車速が目標車速となるように車速制御を行う。
【0086】
なお、実施形態3の車両の制御装置による車速制御の処理は、実施形態1の車両の制御装置による車速制御の処理に対して、走行する車両の左右方向の応力としてヨーレイトを横加速度に変更しただけで、その他の処理は同様である。
【0087】
即ち、実施形態3の車両の制御装置による車速制御において、事前に、実施形態1と同様に、車両のベンチテストにより車両の前輪及び後輪における車両感度(横加速度/路面入力)を取得しておく。そして、時間軸に対する前輪における逆相入力変位量xFr(t)と、時間軸に対する後輪における逆相入力変位量xRr(t)とをFFT(高速フーリエ変換)処理を行うことで、周波数軸に対する前輪における逆相入力変位量∂XFr(f)と、周波数軸に対する後輪における逆相入力変位量∂XRr(f)を算出し、下記数式14、数式15に表すように、車両の前輪及び後輪における車両感度(横加速度/路面入力)として、(∂Y/∂XFr)(f)と(∂Y/∂XRr)(f)を算出する。
【0088】
【数14】
【数15】
【0089】
このように事前準備がなされた状態で、実施形態1の車両の制御装置と同様に、車速制御が実行される。即ち、加速度センサ31は、走行する車両に発生する横加速度a(t)を検出し、FFT処理を行って周波数に対する横加速度A(f)を算出し、この横加速度A(f)が最大となるピーク周波数f0を特定する。そして、ピーク周波数f0における横加速度A(f0)を、事前に求めた車両の前輪及び後輪における車両感度(横加速度/路面入力)としての(∂Y/∂XFr)(f)と(∂Y/∂XRr)(f)を用いて算出し、現在の車速V0と車両のホイールベースWBを用いて横加速度A(f0)を前輪側に寄与する分と後輪側に寄与する分とに分離する。この場合、走行する車両に作用する横加速度A(f0)は、下記数式16により規定される。
【0090】
【数16】
【0091】
以下の処理は、上述した実施形態1と同様であることから、詳細な説明は省略する。
【0092】
但し、実施形態3の車両の制御装置のように、走行する車両の左右方向の応力として横加速度を用いた場合、車両の直進走行安定性だけでなく、乗心地を向上することができる。即ち、走行する車両の左右方向の応力として横加速度を用い、車両の乗心地を向上させる場合、加速度センサ31が検出した横加速度が最大となるピーク周波数は、比較的高くなることから、少ない車速補正量で横加速度前後位相差が180度に近づくような目標車速を設定することができる。
【0093】
車両の直進走行安定性を優先する場合、図16に示すように、現在の車速を目標車速に変更することとなる。一方、車両の乗心地を優先する場合、図17に示すように、現在の車速を目標車速に変更することとなる。ここで、車両の直進走行安定性を優先するときは、図16に示すように、ピーク周波数f0=3Hzであるが、車両の乗心地を優先するときは、図17に示すように、ピーク周波数f0=10Hzとなる。そのため、各目標車速位相幅が小さくなり、少ない車速補正量で横加速度前後位相差が180度に近づくような目標車速を設定することができる。
【0094】
このように実施形態3の車両の制御装置によれば、加速度センサ31が検出した横加速度に基づいてピーク周波数を特定する加速度ピーク周波数特定部41と、事前にベンチテストで求めた車両感度とピーク周波数に対応する横加速度と車速とに基づいて前後輪側に作用する横加速度の位相の偏差を算出する加速度前後位相差算出部43と、横加速度前後位相差が180度に近づくような目標車速を設定する目標車速算出部44とを設けている。
【0095】
従って、前輪側の横加速度の位相と後輪側の横加速度の位相の偏差、つまり、横加速度前後位相差が180度に近づくような目標車速を設定するため、現在の車速をこの目標車速に補正するだけで、前輪側の横加速度の位相と後輪側の横加速度の位相とが互いに打ち消しあい、路面状況などの周囲環境から車両に作用する横加速度を適正に低減することが可能となり、別途装置などを搭載することなく、車両における直進走行安定性を向上することができ、製造コストの増加や車両重量の増加も抑制することができる。
【0096】
なお、上述した各実施形態では、走行する車両の左右方向の応力としてヨーレイトや横加速度を適用したが、これらに限定されるものではない。また、実施形態3で適用した横加速度を実施形態2に適用してもよい。また、動力源としてエンジンを適用したが、電気モータを兼用したり、単独で用いたりしてもよい。
【符号の説明】
【0097】
11 ヨーレイトセンサ(左右方向応力検出部)
12 操舵角センサ
13 車速センサ
14,32 制御装置(動力源制御部)
15 エンジン(動力源)
21 ヨーレイトピーク周波数特定部
22 ヨーレイト判定部(応力判定部)
23 ヨーレイト前後位相差算出部(前後輪位相差算出部)
24,44 目標車速算出部(目標車速設定部)
31 加速度センサ左右方向応力検出部)
41 加速度ピーク周波数特定部
42 加速度判定部(応力判定部)
43 加速度前後位相差算出部(前後輪位相差算出部)
【技術分野】
【0001】
本発明は、車両の制御装置に関する。
【背景技術】
【0002】
走行する車両に対して路面や周囲環境などの外乱が作用した場合、一般的には、車両の操舵角制御やサスペンション制御などを実行して対処している。例えば、下記特許文献1に記載された前後輪操舵装置の制御方法では、ステアリングホイールを操舵することで前輪舵角及び後輪舵角を可能に構成し、車速及びステアリングホイールの操舵角に対応した目標ヨーレイト値を設定し、目標ヨーレイト値と車両に作用する実ヨーレイト値との偏差に基づいて前輪舵角をフィードバック制御すると共に、横滑り角が零となるように後輪舵角をフィードフォワード制御している。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平07−156819号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述した従来の車両の制御装置では、前輪だけでなく後輪を操舵する装置を追加しなければならず、製造コストの増加や車両重量の増加を招いてしまう。
【0005】
本発明は、上記の事情に鑑みてなされたものであって、製造コストの増加や車両重量の増加を招くことなく車両における直進走行性の向上を可能とする車両の制御装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の車両の制御装置は、車両を走行可能な動力源と、前記車両の左右方向における特有の応力発生形態に基づいて前輪側に作用する応力の位相と後輪側に作用する応力の位相との偏差を算出する前後輪位相差算出部と、前記前後輪位相差算出部が算出した偏差が180度に近づくような目標車速を設定する目標車速設定部と、前記目標車速設定部が設定した目標車速となるように前記動力源を制御する動力源制御部と、を備えることを特徴とする。
【0007】
上記車両の制御装置にて、走行する前記車両に作用する左右方向の応力がドライバの運転操作により発生したものであるかを判定する応力判定部を設け、該応力判定部がドライバの運転操作により車両の左右方向の応力が発生したものであると判定したとき、前記動力源制御部は、現在の車速が維持されるように前記動力源を制御することが好ましい。
【0008】
上記車両の制御装置にて、走行する前記車両の左右方向の応力を検出する左右方向応力検出部を設け、前記前後輪位相差算出部は、前記左右方向応力検出部が検出した左右方向の応力に基づいて前輪側に作用する応力の位相と後輪側に作用する応力の位相との偏差を算出することが好ましい。
【0009】
上記車両の制御装置にて、前記目標車速設定部は、現在の車速との偏差が予め設定された制限値内で、前記前後輪位相差算出部が算出した偏差が180度に近づくような目標車速を設定することが好ましい。
【発明の効果】
【0010】
本発明に係る車両の制御装置によれば、車両の左右方向における特有の応力発生形態に基づいて前輪側に作用する応力の位相と後輪側に作用する応力の位相との偏差を算出し、算出した偏差が180度に近づくような目標車速を設定して動力源を制御するので、製造コストの増加や車両重量の増加を招くことなく、車両における直進走行性を向上することができるという効果を奏する。
【図面の簡単な説明】
【0011】
【図1】図1は、本発明の実施形態1に係る車両の制御装置を表す概略構成図である。
【図2】図2は、実施形態1の車両の制御装置における車速制御の処理を表すフローチャートである。
【図3】図3は、前後車輪に対する逆相入力を説明するための概略図である。
【図4】図4は、前輪逆位相入力[変位]に対する発生ヨーレイト[角度/時間]の関数を示す伝達関数を表すグラフである。
【図5】図5は、後輪逆位相入力[変位]に対する発生ヨーレイト[角度/時間]の関数を示す伝達関数を表すグラフである。
【図6】図6は、ランダム路を走行する車両にて計測されたヨーレイトをFFTしたグラフである。
【図7】図7は、現在の車速と目標車速における各ヨーレイトの位相を表すグラフである。
【図8】図8は、現在の車速を第1目標車速に補正するときのヨーレイトの位相変位を表すグラフである。
【図9】図9は、現在の車速を第2目標車速に補正するときのヨーレイトの位相変位を表すグラフである。
【図10】図10は、現在の車速を制限値外の目標車速に補正するときのヨーレイトの位相変位を表すグラフである。
【図11】図11は、現在の車速を制限値内の目標車速に補正するときのヨーレイトの位相変位を表すグラフである。
【図12】図12は、本発明の実施形態2に係る車両の制御装置における車速制御の処理を表すフローチャートである。
【図13】図13は、前輪逆位相入力[変位]に対する発生ヨーレイト[角度/時間]の関数を示す伝達関数を表すグラフである。
【図14】図14は、後輪逆位相入力[変位]に対する発生ヨーレイト[角度/時間]の関数を示す伝達関数を表すグラフである。
【図15】図15は、本発明の実施形態3に係る車両の制御装置を表す概略構成図である。
【図16】図16は、現在の車速を第1目標車速に補正するときの横加速度の位相変位を表すグラフである。
【図17】図17は、現在の車速を第2目標車速に補正するときの横加速度の位相変位を表すグラフである。
【発明を実施するための形態】
【0012】
以下に、本発明に係る車両の制御装置の実施形態を図面に基づいて詳細に説明する。なお、この実施形態によりこの発明が限定されるものではなく、また、実施形態が複数ある場合には、各実施形態を組み合わせて構成するものも含むものである。
【0013】
〔実施形態1〕
図1は、本発明の実施形態1に係る車両の制御装置を表す概略構成図、図2は、実施形態1の車両の制御装置における車速制御の処理を表すフローチャート、図3は、前後車輪に対する逆相入力を説明するための概略図、図4は、前輪逆位相入力[変位]に対する発生ヨーレイト[角度/時間]の関数を示す伝達関数を表すグラフ、図5は、後輪逆位相入力[変位]に対する発生ヨーレイト[角度/時間]の関数を示す伝達関数を表すグラフ、図6は、ランダム路を走行する車両にて計測されたヨーレイトをFFTしたグラフ、図7は、現在の車速と目標車速における各ヨーレイトの位相を表すグラフ、図8は、現在の車速を第1目標車速に補正するときのヨーレイトの位相変位を表すグラフ、図9は、現在の車速を第2目標車速に補正するときのヨーレイトの位相変位を表すグラフ、図10は、現在の車速を制限値外の目標車速に補正するときのヨーレイトの位相変位を表すグラフ、図11は、現在の車速を制限値内の目標車速に補正するときのヨーレイトの位相変位を表すグラフである。
【0014】
実施形態1の車両は、図示しないが、4つの車輪(前輪及び後輪)を有しており、ステアリングにより2つの前輪を操舵可能となっている。なお、ステアリングにより4つの車輪を操舵可能としてもよい。また、この車両は、内燃機関としてガソリンエンジンまたはディーゼルエンジン(以下、エンジンと称する。)が搭載され、エンジンの駆動力が変速機からアウトプットシャフト、リヤデファレンシャル、ドライブシャフトを介して各後輪に伝達可能となっている。なお、エンジンの駆動力が変速機からフロントデファレンシャル、ドライブシャフトを介して2つの前輪に伝達可能としてもよい。
【0015】
また、エンジンは、電子制御ユニット(ECU)により制御可能となっている。即ち、ECUは、検出された吸入空気量、アクセル開度、スロットル開度、エンジン回転数などに基づいてインジェクタによる燃料噴射量や燃料噴射時期、点火プラグによる点火時期などを設定し、エンジンの出力を制御している。
【0016】
実施形態1の車両の制御装置は、図1に示すように、ヨーレイトセンサ11と、操舵角センサ12と、車速センサ13と、制御装置(ECU)14と、エンジン15とから構成されている。即ち、制御装置14は、ヨーレイトセンサ11と操舵角センサ12と車速センサ13の検出結果に基づいてエンジン15の出力を制御する。
【0017】
そして、制御装置14は、ヨーレイトピーク周波数特定部21と、ヨーレイト判定部22と、ヨーレイト前後位相差算出部23と、目標車速算出部24とを有している。
【0018】
即ち、ヨーレイトセンサ11は、走行する車両の左右方向の応力、つまり、ヨーレイト(車両の旋回方向への回転角の変化する速度)を検出する本発明の左右方向応力検出部として機能し、ヨーレイトピーク周波数特定部21は、ヨーレイトセンサ11が検出したヨーレイトに基づいてこのヨーレイトが最大となるピーク周波数を特定する。ヨーレイト判定部22は、走行する車両に発生したヨーレイトがドライバの運転操作により発生したものであるか、周囲環境や路面環境などの車両走行環境により発生したものであるかを判定する本発明の応力判定部として機能する。この場合、ヨーレイト判定部22は、ヨーレイトセンサ11が検出したヨーレイトと、操舵角センサ12が検出した操舵角との関連性からこれを判定する。
【0019】
そして、車両に発生したヨーレイトがドライバの運転操作により発生したものであると判定されたら、以下に説明する制御を実行せずに、現在の車速が維持されるようにエンジン15を制御する。一方、車両に発生したヨーレイトが車両走行環境により発生したものであると判定されたら、以下に説明する制御を実行してエンジン15を制御する。
【0020】
ヨーレイト前後位相差算出部23は、車両に作用する特有のヨーレイト(応力発生形態)と、ヨーレイトセンサ11が検出したヨーレイトとに基づいて前輪側に作用するヨーレイトの位相と後輪側に作用するヨーレイトの位相との偏差を算出する本発明の前後輪位相差算出部として機能する。即ち、ヨーレイト前後位相差算出部23は、事前に車両のベンチテストで取得した車両感度(ヨーレイト/路面入力)と、ヨーレイトピーク周波数特定部21が特定したヨーレイトが最大となるピーク周波数と、車速センサ13が検出した現在の車速とに基づいてヨーレイトを前輪側に寄与する分と後輪側に寄与する分とに分離する。そして、ヨーレイト前後位相差算出部23は、前輪側に寄与するヨーレイトの位相と後輪側に寄与するヨーレイトの位相との偏差、つまり、ヨーレイト前後位相差を算出する。
【0021】
目標車速算出部24は、ヨーレイト前後位相差算出部23が算出したヨーレイト前後位相差が180度に近づくような目標車速を設定する本発明の目標車速設定部として機能する。即ち、目標車速算出部24は、前輪側に寄与するヨーレイトの位相と後輪側に寄与するヨーレイトの位相とが逆になって互いに打ち消すような目標車速を設定する。
【0022】
この場合、目標車速算出部24は、ヨーレイト前後位相差算出部23が算出したヨーレイト前後位相差が180度となる目標車速を設定することが望ましい。但し、現在の車速と、ヨーレイト前後位相差が180度となる目標車速との偏差が大きいときには、ドライバに違和感を与えてしまう。そのため、目標車速算出部24は、現在の車速との偏差が予め設定された制限値内で、ヨーレイト前後位相差が180度に近づくような目標車速を設定する。
【0023】
その後、制御装置14は、目標車速算出部24が設定した目標車速となるようにエンジン15を制御する本発明の動力源制御部として機能する。この場合、制御装置14は、スロットル開度、エンジン回転数、燃料噴射量、燃料噴射時期、点火時期などを補正することで、エンジン15の出力を調整し、現在の車速が目標車速となるように車速制御を行う。
【0024】
ここで、実施形態1の車両の制御装置による車速制御の処理について、図2のフローチャートに基づいて詳細に説明する。
【0025】
実施形態1の車両の制御装置による車速制御において、事前に、車両のベンチテストにより車両の前輪及び後輪における車両感度(ヨーレイト/路面入力)を取得しておく。即ち、図3に示すように、車両の前輪側で考えると、路面から車両に対して入力があったとき、左右の前輪ではその上下変位量が異なる。そのため、下記数式1、数式2に表すように、時間軸に対する前輪における逆相入力変位量xFr(t)と、時間軸に対する後輪における逆相入力変位量xRr(t)とを求めておく。ここで、xFrLH(t)とxFrRH(t)は、左右の前輪の上下変位量であり、xRrLH(t),xRrRH(t)は、左右の後輪の上下変位量である。
【0026】
【数1】
【数2】
【0027】
そして、この時間軸に対する前輪における逆相入力変位量xFr(t)と、時間軸に対する後輪における逆相入力変位量xRr(t)とをFFT(高速フーリエ変換)処理を行うことで、周波数軸に対する前輪における逆相入力変位量XFr(f)と、周波数軸に対する後輪における逆相入力変位量XRr(f)を算出する。そして、下記数式3、数式4に表すように、車両の前輪及び後輪における車両感度(ヨーレイト/路面入力)として、(∂Y/∂XFr)(f)と(∂Y/∂XRr)(f)を算出する。
【0028】
【数3】
【数4】
【0029】
この車両の前輪及び後輪における車両感度(ヨーレイト/路面入力)としての(∂Y/∂XFr)(f)と(∂Y/∂XRr)(f)は、図4及び図5のグラフとしてマップ化され、制御装置14が記憶している。
【0030】
このように事前準備がなされた状態で、実施形態1の車両の制御装置による車速制御が実行される。図2に示すように、ステップS11にて、ヨーレイトセンサ11は、走行する車両に発生するヨーレイトy(t)を検出すると共に、操舵角センサ12は、走行する車両の操舵角ma(t)を検出する。ステップS12にて、制御装置14は、検出したヨーレイトy(t)と操舵角ma(t)に対してFFT処理を行い、周波数に対するヨーレイトY(f)と操舵角Ma(f)を算出する。
【0031】
ステップS13にて、制御装置14のヨーレイトピーク周波数特定部21は、図6に示すように、周波数に対するヨーレイトY(f)に対して、このヨーレイトY(f)が最大となるピーク周波数f0を特定する。ステップS14にて、ヨーレイト判定部22は、この走行する車両に発生したヨーレイトがドライバの運転操作、つまり、ステアリング操舵により発生したものであるかどうかを判定する。即ち、ヨーレイト判定部22は、ピーク周波数f0におけるヨーレイトY(f0)と操舵角Ma(f0)の関連性から、下記数式5によりこれを判定する。
【0032】
【数5】
【0033】
ここで、関連度関数γ2(f0)が判断値0.6より大きければ、ヨーレイトがドライバの運転操作により発生したものであると判定され、何もしないでこのルーチンを抜ける。つまり、制御装置14は、現在の車速が維持されるようにエンジン15を制御する。一方、関連度関数γ2(f0)が判断値0.6以下であれば、ヨーレイトが車両走行環境により発生したものであると判定され、ステップS15に移行する。
【0034】
ステップS15にて、車速センサ13は、現在走行している車両の速度(車速)V0を検出する。そして、ステップS16にて、ヨーレイト前後位相差算出部23は、ピーク周波数f0におけるヨーレイトY(f0)を、事前に求めた車両の前輪及び後輪における車両感度(ヨーレイト/路面入力)としての(∂Y/∂XFr)(f)と(∂Y/∂XRr)(f)を用いて算出し、現在の車速V0と車両のホイールベースWBを用いてヨーレイトY(f0)を前輪側に寄与する分と後輪側に寄与する分とに分離する。
【0035】
即ち、走行する車両に作用するヨーレイトY(f0)は、下記数式6により規定される。ここで、XFr(f0)とXRr(f0)は、現在の周波数軸に対する前輪及び後輪における逆相入力変位量である。
【0036】
【数6】
【0037】
ここで、現在の車速V0、車両のホイールベースWBとすると、前輪が通過したある地点を後輪が通過するのに遅れ時間τ0=WB/Vが発生する。即ち、後輪における逆相入力変位量XRr(f0)は、前輪における逆相入力変位量XFr(f0)に対して、遅れ時間τ0が発生することから、時間軸で数式7が設定され、周波数軸で数式8が設定される。ここで、eは、自然対数、jは、虚数単位、ω0は、角周波数である。
【0038】
【数7】
【数8】
【0039】
そして、数式8を数式6に代入することで、下記数式9を得ることができる。ここで、数式9の括弧内の項だけを抜き出した数式10に表すように、この数式10が車両感度項であり、この車両感度項にて、前項が前輪に寄与するヨーレイトの位相であり、後項が後輪に寄与するヨーレイトの位相である。
【0040】
【数9】
【数10】
【0041】
ステップS17にて、ヨーレイト前後位相差算出部23は、前輪側に寄与するヨーレイトの位相と後輪側に寄与するヨーレイトの位相との偏差、つまり、ヨーレイト前後位相差θ0を算出する。つまり、数式10にて、前項である前輪に寄与するヨーレイトの位相から、後項である後輪に寄与するヨーレイトの位相を減算することで、ヨーレイト前後位相差θ0を求めることができる。
【0042】
ステップS18にて、目標車速算出部24は、ヨーレイト前後位相差θ0が180度になる目標車速Vを設定する。即ち、現在の車速V0、ヨーレイト前後位相差θ0である車両の走行状態から、目標車速Vに変更したときのヨーレイト前後位相差θを下記数式11により求めることができる。
【0043】
【数11】
【0044】
そして、この数式11から、ヨーレイト前後位相差θが180度となる目標車速Vは、図7に示すように、目標車速VUpperと目標車速VLowerの2通りが存在する。つまり、前輪側に寄与するヨーレイトの位相と後輪側に寄与するヨーレイトの位相は、現在の車速V0で、周波数軸方向にヨーレイト前後位相差θ0だけずれていることから、現在の車速V0を、高速側の第1目標車速VUpperに変更する方法と、低速側の第2目標車速VLowerに変更する方法がある。
【0045】
即ち、図8に示すように、現在の車速V0を高速側の第1目標車速VUpperに変更すると、車速が上昇することとなる。一方、図9に示すように、現在の車速V0を低速側の第2目標車速VLowerに変更すると、車速が低下することとなる。現在の車速V0を第1目標車速VUpperまたは第2目標車速VLowerに変更する条件としては、ヨーレイト前後位相差θ0が0度より大きく、且つ、180度より小さければ、第1目標車速VUpperに変更し、ヨーレイト前後位相差θ0が180度より大きく、且つ、360度より小さければ、第2目標車速VLowerに変更するとよい。
【0046】
ステップS19にて、現在の車速V0を目標車速V(第1目標車速VUpperまたは第2目標車速VLower)に変更したときの車速補正量ΔVを算出する。ステップS20にて、この車速補正量ΔVが制限値である5km/hより小さいかどうかを判定する。ここで、車速補正量ΔVが制限値である5km/hより小さいと判定されたら、ステップS22に直接移行し、車速補正量ΔVが制限値である5km/h以上であると判定されたら、ステップS21にて、車速補正量ΔVを5km/hに変更した後、ステップS22に移行する。
【0047】
即ち、目標車速算出部24は、ヨーレイト前後位相差算出部23が算出したヨーレイト前後位相差が180度となる目標車速Vを設定することが望ましい。しかし、図10に示すように、現在の車速V0を目標車速Vに変更するときの車速補正量ΔVが制限値である5km/hより大きくなると、例えば、現在の車速V0から目標車速Vへ大きく低下することとなり、ドライバに違和感を与えてしまう。そのため、目標車速算出部24は、現在の車速V0を目標車速Vに変更するときの車速補正量ΔVが制限値である5km/hより大きくなったら、図11に示すように、車速補正量ΔVを制限値である5km/hとし、目標車速Vを補正する。この場合、ヨーレイト前後位相差が180度となる目標車速Vとはならないものの、ヨーレイト前後位相差が180度に近づくような目標車速を設定する。
【0048】
その後、ステップS22にて、制御装置14は、目標車速算出部24が設定した目標車速Vとなるように、エンジン15を制御する。具体的に、制御装置14は、スロットル開度を調整(増減)することで、エンジン15の出力を調整し、現在の車速V0が目標車速Vとなるように車速制御を行う。
【0049】
このようにヨーレイト前後位相差θ0が180度になる(また、近づく)目標車速Vを設定し、エンジン15の出力を調整することで、前輪に寄与するヨーレイトの位相と後輪に寄与するヨーレイトの位相が全くの逆位相となり、互いのヨーレイトが打ち消すことで、走行する車両に対して路面状況などの外乱により発生するヨーレイトが低減される。
【0050】
このように実施形態1の車両の制御装置によれば、ヨーレイトセンサ11が検出したヨーレイトに基づいてピーク周波数を特定するヨーレイトピーク周波数特定部21と、事前にベンチテストで求めた車両感度とピーク周波数に対応するヨーレイトと車速とに基づいて前後輪側に作用するヨーレイトの位相の偏差を算出するヨーレイト前後位相差算出部23と、ヨーレイト前後位相差が180度に近づくような目標車速を設定する目標車速算出部24とを設けている。
【0051】
従って、前輪側逆位相入力[変位]による発生ヨーレイトの位相と後輪側逆位相入力[変位]による発生ヨーレイトの位相の偏差、つまり、ヨーレイト前後位相差が180度に近づくような目標車速を設定するため、現在の車速をこの目標車速に補正するだけで、前輪側のヨーレイトの位相と後輪側のヨーレイトの位相とが互いに打ち消しあい、路面状況などの周囲環境から車両に作用するヨーレイトを適正に低減することが可能となり、別途装置などを搭載することなく、車両における直進走行安定性を向上することができ、製造コストの増加や車両重量の増加も抑制することができる。
【0052】
また、実施形態1の車両の制御装置では、走行する車両に発生したヨーレイトがドライバの運転操作により発生したものであるか、または、周囲環境により発生したものであるかを判定するヨーレイト判定部22を設け、ヨーレイトがドライバの運転操作により発生したものであると判定されたら、現在の車速が維持されるようにエンジン15を制御する。この場合、ヨーレイト判定部22は、ヨーレイトセンサ11が検出したヨーレイトと、操舵角センサ12が検出した操舵角との関連性からこれを判定している。従って、ヨーレイトがドライバの運転操作により発生したものであるか、周囲環境により発生したものであるかを適正に判定することで、ドライバの運転操作によりヨーレイトが発生したときには、ヨーレイトを抑制する制御を行わないため、ドライバに対する違和感の発生を防止することができる。
【0053】
また、実施形態1の車両の制御装置では、ベンチテストで求めた車両感度と現在発生しているヨーレイトと車速とから前後輪側に作用するヨーレイトの位相の偏差を算出している。従って、ヨーレイト前後位相差を短時間で高精度に算出することが可能となり、車両における直進走行安定性を適正に向上することができる。
【0054】
また、実施形態1の車両の制御装置では、目標車速算出部24は、現在の車速とヨーレイト前後位相差が180度となる目標車速との偏差が、予め設定された制限値内で、ヨーレイト前後位相差が180度に近づくような目標車速を設定している。従って、現在の車速から目標車速への補正によりドライバに違和感を与えることが軽減され、ドライバビリティの低下を抑制することができる。
【0055】
〔実施形態2〕
図12は、本発明の実施形態2に係る車両の制御装置における車速制御の処理を表すフローチャート、図13は、前輪逆位相入力[変位]に対する発生ヨーレイト[角度/時間]の関数を示す伝達関数を表すグラフ、図14は、後輪逆位相入力[変位]に対する発生ヨーレイト[角度/時間]の関数を示す伝達関数を表すグラフである。なお、本実施形態の車両の制御装置の基本的な構成は、上述した実施形態1とほぼ同様の構成であり、図1を用いて説明すると共に、上述した実施形態と同様の機能を有する部材には、同一の符号を付して詳細な説明は省略する。
【0056】
実施形態2の車両の制御装置は、図1に示すように、操舵角センサ12と、車速センサ13と、制御装置(ECU)14と、エンジン15とから構成され、制御装置14は、操舵角センサ12と車速センサ13の検出結果に基づいてエンジン15の出力を制御しており、実施形態2の車両の制御装置は、実施形態1の車両の制御装置のように、ヨーレイトセンサ11を用いてはいない。
【0057】
そして、制御装置14は、ヨーレイト判定部22と、ヨーレイト前後位相差算出部23と、目標車速算出部24とを有し、ヨーレイトピーク周波数特定部21はない。
【0058】
即ち、ヨーレイト判定部22は、走行する車両に発生したヨーレイトがドライバの運転操作により発生したものであるか、周囲環境や路面環境などの車両走行環境により発生したものであるかを判定する本発明の応力判定部として機能する。この場合、ヨーレイト判定部22は、操舵角センサ12が検出した操舵角からこれを判定する。
【0059】
そして、車両に発生したヨーレイトがドライバの運転操作により発生したものであると判定されたら、以下に説明する制御を実行せずに、現在の車速が維持されるようにエンジン15を制御する。一方、車両に発生したヨーレイトが車両走行環境により発生したものであると判定されたら、以下に説明する制御を実行してエンジン15を制御する。
【0060】
ヨーレイト前後位相差算出部23は、車両に作用する特有のヨーレイト(応力発生形態)に基づいて前輪側に作用するヨーレイトの位相と後輪側に作用するヨーレイトの位相との偏差を算出する本発明の前後輪位相差算出部として機能する。即ち、ヨーレイト前後位相差算出部23は、事前に車両のベンチテストで取得した車両感度(ヨーレイト/路面入力)と、この車両感度から求めた車両固有のヨーレイト共振周波数と、車速センサ13が検出した現在の車速とに基づいてヨーレイトを前輪側に寄与する分と後輪側に寄与する分とに分離する。そして、ヨーレイト前後位相差算出部23は、前輪側に寄与するヨーレイトの位相と後輪側に寄与するヨーレイトの位相との偏差、つまり、ヨーレイト前後位相差を算出する。
【0061】
ここで、実施形態2の車両の制御装置による車速制御の処理について、図12のフローチャートに基づいて詳細に説明する。
【0062】
実施形態2の車両の制御装置による車速制御において、事前に、実施形態1と同様に、車両のベンチテストにより車両の前輪及び後輪における車両感度(ヨーレイト/路面入力)を取得しておく。即ち、実施形態1に用いた数式1、数式2のように、時間軸に対する前輪における逆相入力変位量xFr(t)と、時間軸に対する後輪における逆相入力変位量xRr(t)とを求めておく。
【0063】
そして、この時間軸に対する前輪における逆相入力変位量xFr(t)と、時間軸に対する後輪における逆相入力変位量xRr(t)とをFFT(高速フーリエ変換)処理を行うことで、周波数軸に対する前輪における逆相入力変位量∂XFr(f)と、周波数軸に対する後輪における逆相入力変位量∂XRr(f)を算出し、実施形態1に用いた数式3、数式4のように、車両の前輪及び後輪における車両感度(ヨーレイト/路面入力)として、(∂Y/∂XFr)(f)と(∂Y/∂XRr)(f)を算出する。
【0064】
この車両の前輪及び後輪における車両感度(ヨーレイト/路面入力)としての(∂Y/∂XFr)(f)と(∂Y/∂XRr)(f)は、図13及び図14のグラフとしてマップ化され、制御装置14が記憶している。そして、このベンチテストで求めた車両感度(ヨーレイト/路面入力)としてのマップ化にて、周波数に対する車両感度(∂Y/∂XFr)(f)、(∂Y/∂XRr)(f)が最大となるピーク周波数fFr、fRrを特定する。一般的に、車両の構造(サスペンション構造など)は、前後が大きく変わらないことから、ピーク周波数fFr、fRrは同程度になると考えられる。従って、数式12に表すように、このピーク周波数fFr、fRrの平均値を車両固有のヨーレイト共振周波数f0として定義する。
【0065】
【数12】
【0066】
このように事前準備がなされた状態で、実施形態2の車両の制御装置による車速制御が実行される。図12に示すように、ステップS31にて、操舵角センサ12は、走行する車両の操舵角ma(t)を検出する。ステップS32にて、制御装置14は、検出した操舵角ma(t)に対してFFT処理を行い、周波数に対する操舵角Ma(f)を算出する。
【0067】
ステップS33にて、前述したように、ベンチテストで求めた車両感度(ヨーレイト/路面入力)(∂Y/∂XFr)(f)、(∂Y/∂XRr)(f)が最大となるピーク周波数fFr、fRrの平均値を車両固有のヨーレイト共振周波数f0として特定する。ステップS34にて、ヨーレイト判定部22は、走行する車両に発生したヨーレイトがドライバの運転操作、つまり、ステアリング操舵により発生したものであるかどうかを判定する。即ち、ヨーレイト判定部22は、操舵角Ma(f0)に基づいて、下記数式13によりこれを判定する。
【0068】
【数13】
【0069】
ここで、操舵角Ma(f0)の絶対値が判断操舵角度10度以上であれば、ヨーレイトがドライバの運転操作により発生したものであると判定され、何もしないでこのルーチンを抜ける。つまり、制御装置14は、現在の車速が維持されるようにエンジン15を制御する。一方、操舵角Ma(f0)の絶対値が判断操舵角度10度より小さければ、ヨーレイトが車両走行環境により発生したものであると判定され、ステップS35に移行する。
【0070】
なお、以下のステップS35からS42の処理は、実施形態1のステップS15からS22の処理とほぼ同様である。即ち、ステップS35にて、車速センサ13は、現在走行している車両の速度(車速)V0を検出する。そして、ステップS36にて、ヨーレイト前後位相差算出部23は、車両固有のヨーレイト共振周波数f0におけるヨーレイトY(f0)を、事前に求めた車両の前輪及び後輪における車両感度(ヨーレイト/路面入力)としての(∂Y/∂XFr)(f)と(∂Y/∂XRr)(f)を用いて算出し、現在の車速V0と車両のホイールベースWBを用いてヨーレイトY(f0)を前輪側に寄与する分と後輪側に寄与する分とに分離する。
【0071】
ステップS37にて、ヨーレイト前後位相差算出部23は、前輪側に寄与するヨーレイトの位相と後輪側に寄与するヨーレイトの位相との偏差、つまり、ヨーレイト前後位相差θ0を算出する。ステップS38にて、目標車速算出部24は、ヨーレイト前後位相差θ0が180度になる目標車速Vを設定する。
【0072】
ステップS39にて、現在の車速V0を目標車速Vに変更したときの車速補正量ΔVを算出する。ステップS40にて、この車速補正量ΔVが制限値である5km/hより小さいかどうかを判定する。ここで、車速補正量ΔVが制限値である5km/hより小さいと判定されたら、ステップS42に直接移行し、車速補正量ΔVが制限値である5km/h以上であると判定されたら、ステップS41にて、車速補正量ΔVを5km/hに変更した後、ステップS42に移行する。
【0073】
その後、ステップS42にて、制御装置14は、目標車速算出部24が設定した目標車速Vとなるように、エンジン15を制御する。具体的に、制御装置14は、スロットル開度を調整(増減)することで、エンジン15の出力を調整し、現在の車速V0が目標車速Vとなるように車速制御を行う。
【0074】
このようにヨーレイト前後位相差θ0が180度になる(また、近づく)目標車速Vを設定し、エンジン15の出力を調整することで、前輪に寄与するヨーレイトの位相と後輪に寄与するヨーレイトの位相が全くの逆位相となり、互いのヨーレイトが打ち消すことで、走行する車両に対して路面状況などの外乱により発生するヨーレイトが低減される。
【0075】
このように実施形態2の車両の制御装置によれば、事前にベンチテストで求めた車両感度(ヨーレイト/路面入力)が最大となる前後輪のピーク周波数の平均値を車両固有のヨーレイト共振周波数として特定し、この車両固有のヨーレイト共振周波数に対応するヨーレイトと車速とに基づいて前後輪側に作用するヨーレイトの位相の偏差を算出するヨーレイト前後位相差算出部23と、ヨーレイト前後位相差が180度に近づくような目標車速を設定する目標車速算出部24とを設けている。
【0076】
従って、前輪側のヨーレイトの位相と後輪側のヨーレイトの位相の偏差、つまり、ヨーレイト前後位相差が180度に近づくような目標車速を設定するため、現在の車速をこの目標車速に補正するだけで、前輪側のヨーレイトの位相と後輪側のヨーレイトの位相とが互いに打ち消しあい、路面状況などの周囲環境から車両に作用するヨーレイトを適正に低減することが可能となり、別途装置などを搭載することなく、車両における直進走行安定性を向上することができ、製造コストの増加や車両重量の増加も抑制することができる。
【0077】
〔実施形態3〕
図15は、本発明の実施形態3に係る車両の制御装置を表す概略構成図、図16は、現在の車速を第1目標車速に補正するときの横加速度の位相変位を表すグラフ、図17は、現在の車速を第2目標車速に補正するときの横加速度の位相変位を表すグラフである。なお、上述した実施形態と同様の機能を有する部材には、同一の符号を付して詳細な説明は省略する。
【0078】
実施形態3の車両の制御装置は、図15に示すように、加速度センサ31と、操舵角センサ12と、車速センサ13と、制御装置(ECU)32と、エンジン15とから構成されている。即ち、制御装置32は、加速度センサ31と操舵角センサ12と車速センサ13の検出結果に基づいてエンジン15の出力を制御する。
【0079】
そして、制御装置32は、加速度ピーク周波数特定部41と、加速度判定部42と、加速度前後位相差算出部43と、目標車速算出部44とを有している。
【0080】
即ち、加速度センサ31は、走行する車両の左右方向の応力、つまり、横加速度(車両の左右方向へ移動する加速度)を検出する本発明の左右方向応力検出部として機能し、加速度ピーク周波数特定部41は、加速度センサ31が検出した横加速度に基づいてこの横加速度が最大となるピーク周波数を特定する。加速度判定部42は、走行する車両に発生した横加速度がドライバの運転操作により発生したものであるか、周囲環境や路面環境などの車両走行環境により発生したものであるかを判定する本発明の応力判定部として機能する。この場合、加速度判定部42は、加速度センサ31が検出した横加速度と、操舵角センサ12が検出した操舵角との関連性からこれを判定する。
【0081】
そして、車両に発生した横加速度がドライバの運転操作により発生したものであると判定されたら、以下に説明する制御を実行せずに、現在の車速が維持されるようにエンジン15を制御する。一方、車両に発生した横加速度が車両走行環境により発生したものであると判定されたら、以下に説明する制御を実行してエンジン15を制御する。
【0082】
加速度前後位相差算出部43は、車両に作用する特有の横加速度(応力発生形態)と、加速度センサ31が検出した横加速度とに基づいて前輪側に作用する加速度の位相と後輪側に作用する加速度の位相との偏差を算出する本発明の前後輪位相差算出部として機能する。即ち、加速度前後位相差算出部43は、事前に車両のベンチテストで取得した車両感度(横加速度/路面入力)と、加速度ピーク周波数特定部41が特定した横加速度が最大となるピーク周波数と、車速センサ13が検出した現在の車速とに基づいて横加速度を前輪側に寄与する分と後輪側に寄与する分とに分離する。そして、加速度前後位相差算出部43は、前輪側に寄与する横加速度の位相と後輪側に寄与する横加速度の位相との偏差、つまり、横加速度前後位相差を算出する。
【0083】
目標車速算出部44は、加速度前後位相差算出部43が算出した横加速度前後位相差が180度に近づくような目標車速を設定する本発明の目標車速設定部として機能する。即ち、目標車速算出部44は、前輪側に寄与する横加速度の位相と後輪側に寄与する横加速度の位相とが逆になって互いに打ち消すような目標車速を設定する。
【0084】
この場合、目標車速算出部44は、加速度前後位相差算出部43が算出した横加速度前後位相差が180度となる目標車速を設定することが望ましい。但し、現在の車速と、横加速度前後位相差が180度となる目標車速との偏差が大きいときには、ドライバに違和感を与えてしまう。そのため、目標車速算出部44は、現在の車速との偏差が予め設定された制限値内で、横加速度前後位相差が180度に近づくような目標車速を設定する。
【0085】
その後、制御装置32は、目標車速算出部44が設定した目標車速となるようにエンジン15を制御する本発明の動力源制御部として機能する。この場合、制御装置32は、スロットル開度、エンジン回転数、燃料噴射量、燃料噴射時期、点火時期などを補正することで、エンジン15の出力を調整し、現在の車速が目標車速となるように車速制御を行う。
【0086】
なお、実施形態3の車両の制御装置による車速制御の処理は、実施形態1の車両の制御装置による車速制御の処理に対して、走行する車両の左右方向の応力としてヨーレイトを横加速度に変更しただけで、その他の処理は同様である。
【0087】
即ち、実施形態3の車両の制御装置による車速制御において、事前に、実施形態1と同様に、車両のベンチテストにより車両の前輪及び後輪における車両感度(横加速度/路面入力)を取得しておく。そして、時間軸に対する前輪における逆相入力変位量xFr(t)と、時間軸に対する後輪における逆相入力変位量xRr(t)とをFFT(高速フーリエ変換)処理を行うことで、周波数軸に対する前輪における逆相入力変位量∂XFr(f)と、周波数軸に対する後輪における逆相入力変位量∂XRr(f)を算出し、下記数式14、数式15に表すように、車両の前輪及び後輪における車両感度(横加速度/路面入力)として、(∂Y/∂XFr)(f)と(∂Y/∂XRr)(f)を算出する。
【0088】
【数14】
【数15】
【0089】
このように事前準備がなされた状態で、実施形態1の車両の制御装置と同様に、車速制御が実行される。即ち、加速度センサ31は、走行する車両に発生する横加速度a(t)を検出し、FFT処理を行って周波数に対する横加速度A(f)を算出し、この横加速度A(f)が最大となるピーク周波数f0を特定する。そして、ピーク周波数f0における横加速度A(f0)を、事前に求めた車両の前輪及び後輪における車両感度(横加速度/路面入力)としての(∂Y/∂XFr)(f)と(∂Y/∂XRr)(f)を用いて算出し、現在の車速V0と車両のホイールベースWBを用いて横加速度A(f0)を前輪側に寄与する分と後輪側に寄与する分とに分離する。この場合、走行する車両に作用する横加速度A(f0)は、下記数式16により規定される。
【0090】
【数16】
【0091】
以下の処理は、上述した実施形態1と同様であることから、詳細な説明は省略する。
【0092】
但し、実施形態3の車両の制御装置のように、走行する車両の左右方向の応力として横加速度を用いた場合、車両の直進走行安定性だけでなく、乗心地を向上することができる。即ち、走行する車両の左右方向の応力として横加速度を用い、車両の乗心地を向上させる場合、加速度センサ31が検出した横加速度が最大となるピーク周波数は、比較的高くなることから、少ない車速補正量で横加速度前後位相差が180度に近づくような目標車速を設定することができる。
【0093】
車両の直進走行安定性を優先する場合、図16に示すように、現在の車速を目標車速に変更することとなる。一方、車両の乗心地を優先する場合、図17に示すように、現在の車速を目標車速に変更することとなる。ここで、車両の直進走行安定性を優先するときは、図16に示すように、ピーク周波数f0=3Hzであるが、車両の乗心地を優先するときは、図17に示すように、ピーク周波数f0=10Hzとなる。そのため、各目標車速位相幅が小さくなり、少ない車速補正量で横加速度前後位相差が180度に近づくような目標車速を設定することができる。
【0094】
このように実施形態3の車両の制御装置によれば、加速度センサ31が検出した横加速度に基づいてピーク周波数を特定する加速度ピーク周波数特定部41と、事前にベンチテストで求めた車両感度とピーク周波数に対応する横加速度と車速とに基づいて前後輪側に作用する横加速度の位相の偏差を算出する加速度前後位相差算出部43と、横加速度前後位相差が180度に近づくような目標車速を設定する目標車速算出部44とを設けている。
【0095】
従って、前輪側の横加速度の位相と後輪側の横加速度の位相の偏差、つまり、横加速度前後位相差が180度に近づくような目標車速を設定するため、現在の車速をこの目標車速に補正するだけで、前輪側の横加速度の位相と後輪側の横加速度の位相とが互いに打ち消しあい、路面状況などの周囲環境から車両に作用する横加速度を適正に低減することが可能となり、別途装置などを搭載することなく、車両における直進走行安定性を向上することができ、製造コストの増加や車両重量の増加も抑制することができる。
【0096】
なお、上述した各実施形態では、走行する車両の左右方向の応力としてヨーレイトや横加速度を適用したが、これらに限定されるものではない。また、実施形態3で適用した横加速度を実施形態2に適用してもよい。また、動力源としてエンジンを適用したが、電気モータを兼用したり、単独で用いたりしてもよい。
【符号の説明】
【0097】
11 ヨーレイトセンサ(左右方向応力検出部)
12 操舵角センサ
13 車速センサ
14,32 制御装置(動力源制御部)
15 エンジン(動力源)
21 ヨーレイトピーク周波数特定部
22 ヨーレイト判定部(応力判定部)
23 ヨーレイト前後位相差算出部(前後輪位相差算出部)
24,44 目標車速算出部(目標車速設定部)
31 加速度センサ左右方向応力検出部)
41 加速度ピーク周波数特定部
42 加速度判定部(応力判定部)
43 加速度前後位相差算出部(前後輪位相差算出部)
【特許請求の範囲】
【請求項1】
車両を走行可能な動力源と、
前記車両の左右方向における特有の応力発生形態に基づいて前輪側に作用する応力の位相と後輪側に作用する応力の位相との偏差を算出する前後輪位相差算出部と、
前記前後輪位相差算出部が算出した偏差が180度に近づくような目標車速を設定する目標車速設定部と、
前記目標車速設定部が設定した目標車速となるように前記動力源を制御する動力源制御部と、
を備えることを特徴とする車両の制御装置。
【請求項2】
走行する前記車両に作用する左右方向の応力がドライバの運転操作により発生したものであるかを判定する応力判定部を設け、該応力判定部がドライバの運転操作により車両の左右方向の応力が発生したものであると判定したとき、前記動力源制御部は、現在の車速が維持されるように前記動力源を制御することを特徴とする請求項1に記載の車両の制御装置。
【請求項3】
走行する前記車両の左右方向の応力を検出する左右方向応力検出部を設け、前記前後輪位相差算出部は、前記左右方向応力検出部が検出した左右方向の応力に基づいて前輪側に作用する応力の位相と後輪側に作用する応力の位相との偏差を算出することを特徴とする請求項1または2に記載の車両の制御装置。
【請求項4】
前記目標車速設定部は、現在の車速との偏差が予め設定された制限値内で、前記前後輪位相差算出部が算出した偏差が180度に近づくような目標車速を設定することを特徴とする請求項1から3のいずれか一つに記載の車両の制御装置。
【請求項1】
車両を走行可能な動力源と、
前記車両の左右方向における特有の応力発生形態に基づいて前輪側に作用する応力の位相と後輪側に作用する応力の位相との偏差を算出する前後輪位相差算出部と、
前記前後輪位相差算出部が算出した偏差が180度に近づくような目標車速を設定する目標車速設定部と、
前記目標車速設定部が設定した目標車速となるように前記動力源を制御する動力源制御部と、
を備えることを特徴とする車両の制御装置。
【請求項2】
走行する前記車両に作用する左右方向の応力がドライバの運転操作により発生したものであるかを判定する応力判定部を設け、該応力判定部がドライバの運転操作により車両の左右方向の応力が発生したものであると判定したとき、前記動力源制御部は、現在の車速が維持されるように前記動力源を制御することを特徴とする請求項1に記載の車両の制御装置。
【請求項3】
走行する前記車両の左右方向の応力を検出する左右方向応力検出部を設け、前記前後輪位相差算出部は、前記左右方向応力検出部が検出した左右方向の応力に基づいて前輪側に作用する応力の位相と後輪側に作用する応力の位相との偏差を算出することを特徴とする請求項1または2に記載の車両の制御装置。
【請求項4】
前記目標車速設定部は、現在の車速との偏差が予め設定された制限値内で、前記前後輪位相差算出部が算出した偏差が180度に近づくような目標車速を設定することを特徴とする請求項1から3のいずれか一つに記載の車両の制御装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2013−60116(P2013−60116A)
【公開日】平成25年4月4日(2013.4.4)
【国際特許分類】
【出願番号】特願2011−199940(P2011−199940)
【出願日】平成23年9月13日(2011.9.13)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成25年4月4日(2013.4.4)
【国際特許分類】
【出願日】平成23年9月13日(2011.9.13)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]