
車両の動力伝達制御装置
【課題】動力源として少なくとも電動機を備えた車両に適用される車両の動力伝達制御装置において、登坂路又は降坂路にて運転者に違和感を与えることなくEV発進すること。
【解決手段】電動機出力軸の接続状態を、動力伝達系統が変速機入力軸と電動機出力軸との間で形成される「IN接続状態」、動力伝達系統が変速機出力軸と電動機出力軸との間で形成される「OUT接続状態」、並びにいずれにも動力伝達系統が形成されない「ニュートラル状態」の何れかに選択可能な切替機構が備えられる。IN又はOUT接続状態にて登坂路(降坂路)でEV発進する場合、ブレーキ操作対応制動力の付与終了(t2)からM/G駆動トルクの付与開始(t3)までの間(制動力もM/G駆動トルクも付与されない期間)に亘ってE/G駆動(回生)トルクが駆動輪に付与される。登坂路での「発進前の一時的な後進」、並びに降坂路での「発進直後の車速の急激な増大」が抑制される。
【解決手段】電動機出力軸の接続状態を、動力伝達系統が変速機入力軸と電動機出力軸との間で形成される「IN接続状態」、動力伝達系統が変速機出力軸と電動機出力軸との間で形成される「OUT接続状態」、並びにいずれにも動力伝達系統が形成されない「ニュートラル状態」の何れかに選択可能な切替機構が備えられる。IN又はOUT接続状態にて登坂路(降坂路)でEV発進する場合、ブレーキ操作対応制動力の付与終了(t2)からM/G駆動トルクの付与開始(t3)までの間(制動力もM/G駆動トルクも付与されない期間)に亘ってE/G駆動(回生)トルクが駆動輪に付与される。登坂路での「発進前の一時的な後進」、並びに降坂路での「発進直後の車速の急激な増大」が抑制される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の動力伝達制御装置に関し、特に、動力源として少なくとも電動機を備えた車両に適用されるものに係わる。
【背景技術】
【0002】
近年、動力源として内燃機関と電動機(電動モータ、電動発電機)とを備えた所謂ハイブリッド車両が開発されてきている(例えば、特許文献1を参照)。ハイブリッド車両では、電動機が、内燃機関と協働又は単独で、車両を駆動する駆動トルクを発生する動力源として、或いは、内燃機関を始動するための動力源として使用される。加えて、電動機が、車両を制動する回生トルクを発生する発電機として、或いは、車両のバッテリに供給・貯留される電気エネルギを発生する発電機として使用される。このように電動機を使用することで、車両全体としての総合的なエネルギ効率(燃費)を良くすることができる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−224710号公報
【発明の概要】
【0004】
ところで、ハイブリッド車両では、電動機の出力軸と変速機の入力軸との間で動力伝達系統が形成される接続状態(以下、「IN接続状態」と称呼する。)が採用される場合と、電動機の出力軸と変速機の出力軸(従って、駆動輪)との間で変速機を介することなく動力伝達系統が形成される接続状態(以下、「OUT接続状態」と称呼する。)が採用される場合と、がある。
【0005】
IN接続状態では、変速機の変速段を変更することで、車両速度に対する電動機の出力軸の回転速度を変更することができる。従って、変速機の変速段を調整することで、電動機の出力軸の回転速度をエネルギ変換効率(より具体的には、駆動トルク、回生トルク等の発生効率)が良好となる範囲内に維持し易いというメリットがある。
【0006】
一方、OUT接続状態では、動力伝達系統が複雑な機構を有する変速機を介さないことから、動力の伝達損失を小さくできるというメリットがある。また、変速機(特に、トルクコンバータを備えない形式の変速機)では、通常、変速作動中(変速段を切り替える作動中)において、変速機の入力軸から出力軸への動力の伝達が一時的に遮断される場合が多い。この結果、車両前後方向の加速度の急激な変化(所謂変速ショック)が発生し易い。このような変速作動中においても、OUT接続状態では、電動機の駆動トルクを変速機の出力軸(従って、駆動輪)へ連続して出力し続けることができ、変速ショックを低減できるというメリットもある。
【0007】
以上のことに鑑み、本出願人は、特願2007−271556号において、電動機の出力軸の接続状態(以下、単に「電動機接続状態」とも称呼する。)をIN接続状態とOUT接続状態とに切り替え可能な切替機構について既に提案している。この切替機構では、電動機の出力軸と変速機の入力軸との間も電動機の出力軸と変速機の出力軸との間も動力伝達系統が形成されない接続状態(以下、「非接続状態」と称呼する。)も選択され得る。
【0008】
ところで、ハイブリッド車両では、内燃機関の駆動トルクを利用することなく電動機の駆動トルクのみを利用して車両が発進し得る。以下、このような発進を「電動機発進」と呼ぶ。電動機発進は、IN接続状態でもOUT接続状態でも達成し得る。電動機発進では、アクセルペダルの踏み込み開始から電動機の駆動トルクが駆動輪に付与開始される。
【0009】
通常、電動機発進時では、運転者は、ブレーキペダルを踏み込んで車両が停止している状態にて、先ず、ブレーキペダルを解放し、その後、アクセルペダルを踏み込むことで、車両を発進させる。従って、ブレーキペダルの解放(従って、制動力の付与終了)からアクセルペダルの踏み込み開始(従って、駆動トルクの付与開始)までの間に、制動力(制動トルク)も駆動トルクも付与されない期間(以下、「制駆動トルクなし期間」と呼ぶ。)が存在する。
【0010】
この「制駆動トルクなし期間」の存在により、登坂路にて電動機発進が行われる場合、発進前において、車両が一時的に後進する現象が発生し得る。以下、この現象を「発進前の一時的な後進(ずり下がり)」と呼ぶ。また、降坂路にて電動機発進が行われる場合、発進直後において、車速が急激に増大する現象が発生し得る。以下、この現象を「発進直後の車速の急激な増大」と呼ぶ。どちらの現象も運転者に違和感を与える。
【0011】
本発明の目的は、動力源として少なくとも電動機を備えた車両に適用される車両の動力伝達制御装置であって、登坂路又は降坂路にて運転者に違和感を与えることなく電動機発進を行うことができるものを提供することにある。
【0012】
本発明による車両の動力伝達制御装置は、前記車両の運転者により操作される加速操作部材の操作を検出する検出手段と、前記電動機の出力軸のトルクに基づく車両加速方向(前進方向)の駆動トルクである電動機駆動トルクを前記加速操作部材の操作に応じて前記車両の駆動輪に付与する電動機トルク制御手段と、前記車両の運転者により操作される制動操作部材の操作に応じた制動力である制動操作対応制動力を前記車両の車輪に付与する制動力制御手段と、前記車両が停止している路面が登坂路か否かを判定する判定手段とを備える。
【0013】
ここにおいて、前記判定手段は、例えば、登坂路の勾配が所定値以上の場合に「登坂路」と判定する。この所定値は、例えば、「制駆動トルクなし期間」において車両が後進しない範囲の上限値以上の値である。
【0014】
本発明による動力伝達制御装置の特徴は、前記電動機トルク制御手段が、前記路面が登坂路であると判定されている場合であって、且つ、前記制動操作対応制動力により前記車両が停止している状態にて前記制動操作対応制動力のゼロに向けた減少傾向が検出されたとき、前記制動操作対応制動力がゼロに達する時点の前の時点から、前記制動操作対応制動力がゼロに達した後であって前記加速操作部材の操作が開始された時点の後の時点までに亘って、前記電動機駆動トルクを前記駆動輪に付与するように構成されたことにある。
【0015】
ここにおいて、「制動操作対応制動力のゼロに向けた減少傾向」は、例えば、制動操作対応制動力が所定値(微小値)を減少しながら通過した場合、制動操作対応制動力の減少速度が所定値以上の場合等に検出され得る。
【0016】
上記構成によれば、「制駆動トルクなし期間」に亘って電動機駆動トルク(=車両加速方向のトルク)が駆動輪に付与され続ける。従って、電動機駆動トルクの大きさを適切に調整することで、「発進前の一時的な後進」の発生が抑制され得る。従って、登坂路にて運転者に違和感を与えることなく電動機発進が実行され得る。
【0017】
この場合、前記電動機トルク制御手段は、前記登坂路の勾配又は前記登坂路の勾配に相関する値が大きいほど、前記駆動輪に付与される前記電動機駆動トルクをより大きい値に調整するように構成されることが好適である。ここにおいて、前記登坂路の勾配に相関する値とは、例えば、停止中の車両に作用する車体前後方向の加速度等である。
【0018】
登坂路の勾配が大きいほど、車両に作用する重力における車両後進方向の成分の大きさが大きい。従って、上記構成によれば、登坂路の勾配にかかわらず、電動機駆動トルクの大きさが「発進前の一時的な後進」の抑制のために必要な適切な大きさに調整され得る。
【0019】
また、上記動力伝達制御装置においては、前記制動力制御手段は、前記制動操作対応制動力よりも大きい制動力を前記車輪に付与可能に構成されていて、前記制動力制御手段は、前記制動操作対応制動力がゼロに達する時点の前の時点から、前記制動操作対応制動力がゼロに達した後であって前記加速操作部材の操作が開始された時点の後の時点までに亘って、前記制動操作対応制動力よりも大きい制動力を前記車輪に付与するように構成され得る。
【0020】
これによれば、「制駆動トルクなし期間」に亘って電動機駆動トルクに加えて制動力が付与され続ける。従って、電動機駆動トルクのみが付与される場合に比して「発進前の一時的な後進」の発生がより確実に抑制され得る。
【0021】
次に、前記電動機トルク制御手段が、前記電動機駆動トルクのみならず、前記電動機の出力軸のトルクに基づく車両減速方向(後進方向)の回生トルクである電動機回生トルクを前記車両の駆動輪に付与するように構成されている場合であって、判定手段が、前記車両が停止している路面が降坂路か否かを判定するように構成されている場合を考える。ここにおいて、前記判定手段は、例えば、降坂路の勾配が所定値以上の場合に「降坂路」と判定する。この所定値は、例えば、「制駆動トルクなし期間」において発進後の車速が急激に増大しない範囲の上限値以上の値である。
【0022】
この場合、前記電動機トルク制御手段は、前記路面が降坂路であると判定されている場合であって、且つ、前記制動操作対応制動力により前記車両が停止している状態にて前記制動操作対応制動力のゼロに向けた減少傾向が検出されたとき、前記制動操作対応制動力がゼロに達する時点の前の時点から、前記制動操作対応制動力がゼロに達した後であって前記加速操作部材の操作が開始された時点の後の時点までに亘って、前記電動機回生トルクを前記駆動輪に付与するように構成され得る。
【0023】
上記構成によれば、「制駆動トルクなし期間」に亘って電動機回生トルク(=車両減速方向のトルク)が駆動輪に付与され続ける。従って、電動機回生トルクの大きさを適切に調整することで、「発進直後の車速の急激な増大」の発生が抑制され得る。より具体的には、発進直後の車速の上昇の推移が適正に調整され得る。従って、降坂路にて運転者に違和感を与えることなく電動機発進が実行され得る。
【0024】
この場合、前記電動機トルク制御手段は、前記降坂路の勾配又は前記降坂路の勾配に相関する値が大きいほど、前記駆動輪に付与される前記電動機回生トルクをより大きい値に調整するように構成されることが好適である。ここにおいて、前記降坂路の勾配に相関する値とは、例えば、停止中の車両に作用する車体前後方向の加速度等である。
【0025】
降坂路の勾配が大きいほど、車両に作用する重力における車両前進方向の成分の大きさが大きい。従って、上記構成によれば、降坂路の勾配にかかわらず、電動機回生トルクの大きさが「発進直後の車速の急激な増大」の抑制のために必要な適切な大きさに調整され得る。換言すれば、降坂路の勾配にかかわらず、発進直後の車速の上昇の推移が適正に調整され得る。
【0026】
また、この場合、前記電動機トルク制御手段は、前記駆動輪に付与される前記電動機回生トルクに基づいて前記電動機にて発電される電力を利用して、前記電動機に電気エネルギを供給する電池を充填するように構成されることが好適である。これによれば、電池の充填がなされない場合に比して、車両全体としての総合的なエネルギ効率(燃費)を良くすることができる。
【0027】
以上、本発明に係る動力伝達制御装置は、動力源として前記電動機に加えて内燃機関を備えた車両にも適用され得る。また、この動力伝達制御装置は、前記内燃機関の出力軸との間で動力伝達系統が形成される入力軸と、前記車両の駆動輪との間で動力伝達系統が形成される出力軸とを備え、前記出力軸の回転速度に対する前記入力軸の回転速度の割合である変速機減速比を調整可能な変速機と、前記電動機の出力軸の接続状態を、前記電動機の出力軸と前記変速機の入力軸との間で動力伝達系統が形成されるIN接続状態と、前記電動機の出力軸と前記変速機の出力軸との間で前記変速機を介することなく動力伝達系統が形成されるOUT接続状態と、前記電動機の出力軸と前記変速機の入力軸との間も前記電動機の出力軸と前記変速機の出力軸との間も動力伝達系統が形成されない非接続状態と、のうちで少なくとも2以上の状態に切り替え可能な切替機構と、を備えることができる。
【0028】
この場合、前記電動機トルク制御手段は、前記切替機構によりIN接続状態又はOUT接続状態が選択された状態にて、前記電動機駆動トルク又は前記電動機回生トルクを前記駆動輪に付与するように構成される。
【0029】
なお、前記変速機は、前記変速機減速比として予め定められた異なる複数の減速比を設定可能な多段変速機であっても、前記変速機減速比として減速比を連続的に(無段階に)調整可能な無段変速機であってもよい。
【0030】
また、前記変速機は、トルクコンバータを備えるとともに車両の走行状態に応じて変速作動が自動的に実行される多段変速機又は無段変速機(所謂オートマチックトランスミッション(AT))であっても、トルクコンバータを備えない多段変速機(所謂マニュアルトランスミッション(MT))であってもよい。MTの場合、運転者によるシフトレバーの操作力により直接的に変速作動が実行される形式であっても、運転者により操作されるシフトレバーの位置を示す信号に基づいてアクチュエータの駆動力により変速作動が実行される形式であっても、運転者によるシフトレバー操作によらず車両の走行状態に応じてアクチュエータの駆動力により変速作動が自動的に実行され得る形式(所謂、オートメイティッド・マニュアル・トランスミッション)であってもよい。
【図面の簡単な説明】
【0031】
【図1】本発明の実施形態に係る車両の動力伝達制御装置を搭載した車両の概略構成図である。
【図2】図1に示した切替機構において切り替え可能な3状態を示した図である。
【図3】図1に示した装置が適用されて平坦路(水平路)にてEV発進がなされる場合における作動の一例を示したタイムチャートである。
【図4】図1に示した装置が適用されて登坂路にてEV発進がなされる場合における作動の一例を示したタイムチャートである。
【図5】図1に示した装置が適用されて登坂路にてEV発進がなされる場合における作動の他の一例を示したタイムチャートである。
【図6】図1に示した装置が適用されて降坂路にてEV発進がなされる場合における作動の一例を示したタイムチャートである。
【発明を実施するための形態】
【0032】
以下、本発明による車両の動力伝達制御装置の実施形態について図面を参照しつつ説明する。
【0033】
(構成)
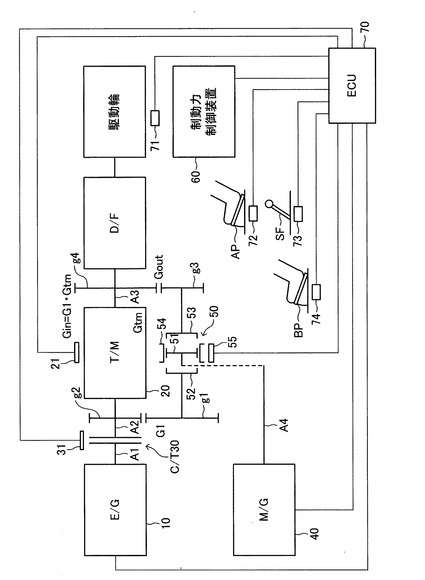
図1は、本発明の実施形態に係る動力伝達制御装置(以下、「本装置」と称呼する。)を搭載した車両の概略構成を示している。この車両は、動力源として内燃機関とモータジェネレータとを備え、且つ、トルクコンバータを備えない多段変速機を使用した所謂オートメイティッド・マニュアル・トランスミッションを備えた車両に適用されている。
【0034】
この車両は、エンジン(E/G)10と、変速機(T/M)20と、クラッチ(C/T)30と、モータジェネレータ(M/G)40と、切替機構50と、制動力制御装置60を備えている。E/G10は、周知の内燃機関の1つであり、例えば、ガソリンを燃料として使用するガソリンエンジン、軽油を燃料として使用するディーゼルエンジンである。E/G10の出力軸A1は、C/T30を介してT/M20の入力軸A2と接続されている。
【0035】
T/M20は、前進用の複数(例えば、5つ)の変速段、後進用の1つの変速段、及びニュートラル段を有するトルクコンバータを備えない周知の多段変速機の1つである。以下、前進用の変速段及び後進用の変速段を「走行用変速段」と称呼する。走行用変速段では、T/M20の入出力軸A2,A3の間で動力伝達系統が形成される。ニュートラル段では、T/M20の入出力軸A2,A3の間で動力伝達系統が形成されない。走行用変速段において、T/M20は、出力軸A3の回転速度に対する入力軸A2の回転速度の割合である変速機減速比Gtmを複数の段階の何れかに任意に設定可能となっている。T/M20では、変速段の切り替えは、T/Mアクチュエータ21を制御することでのみ実行される。
【0036】
C/T30は、周知の構成の1つを備えていて、E/G10の出力軸A1とT/M20の入力軸A2との間で動力が伝達されない遮断状態、及び動力が伝達される接合状態に調整可能となっている。以下、説明の便宜上、接合状態において、T/M20の入力軸A2と出力軸A3との回転が一致している状態を「完全接合状態」と呼び、一致していない状態を「半接合状態」と呼ぶ。この車両では、クラッチペダルは設けられていない。C/T30の状態は、C/Tアクチュエータ31によりクラッチストロークを調整することで制御されるようになっている。
【0037】
M/G40は、周知の構成(例えば、交流同期モータ)の1つを有していて、例えば、ロータ(図示せず)が出力軸A4と一体回転するようになっている。M/G40は、動力源としても発電機としても機能する。
【0038】
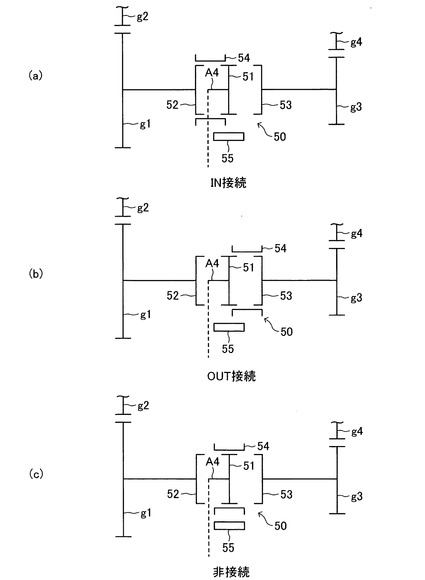
切替機構50は、M/G40の出力軸A4の接続状態を切り替える機構である。切替機構50は、M/G40の出力軸A4と一体回転する連結ピース51と、ギヤg1と一体回転する連結ピース52と、ギヤg3と一体回転する連結ピース53と、スリーブ54と、切替アクチュエータ55とを備える。ギヤg1は、T/M20の入力軸A2と一体回転するギヤg2と常時歯合し、ギヤg3は、T/M20の出力軸A3と一体回転するギヤg4と常時歯合している。
【0039】
スリーブ54は、M/G40の出力軸A4の軸線方向に同軸的に移動可能に配設されていて、切替アクチュエータ55によりその軸線方向の位置が制御されるようになっている。スリーブ54は、連結ピース51,52,53とスプライン嵌合可能となっている。
【0040】
スリーブ54が図2(a)に示すIN接続位置に制御される場合、スリーブ54は、連結ピース51,52とスプライン嵌合する。これにより、ギヤg1,g2を介してT/M20の入力軸A2とM/G40の出力軸A4との間で動力伝達系統が形成される。この状態を「IN接続状態」と呼ぶ。
【0041】
IN接続状態において、T/M20の入力軸A2の回転速度に対するM/G40の出力軸A4の回転速度の割合を「第1減速比G1」と呼び、第1減速比G1と変速機減速比Gtmとの積(G1・Gtm)を「IN接続減速比Gin」と呼ぶ。本例では、G1=(g2の歯数)/(g1の歯数)であるから、Gin=(g2の歯数)/(g1の歯数)・Gtmとなる。即ち、Ginは、T/M20の変速段の変化に応じて変化する。
【0042】
また、スリーブ54が図2(b)に示すOUT接続位置に制御される場合、スリーブ54は、連結ピース51,53とスプライン嵌合する。これにより、ギヤg3、g4を介してT/M20の出力軸A3とM/G40の出力軸A4との間でT/M20を介することなく動力伝達系統が形成される。この状態を「OUT接続状態」と呼ぶ。
【0043】
OUT接続状態において、T/M20の出力軸A3の回転速度に対するM/G40の出力軸A4の回転速度の割合を「OUT接続減速比Gout」と呼ぶ。本例では、Goutは、(g4の歯数)/(g3の歯数)で一定となる。即ち、Goutは、T/M20の変速段の変化に応じて変化しない。
【0044】
また、スリーブ54が図2(c)に示す非接続位置に制御される場合、スリーブ54は、連結ピース51のみとスプライン嵌合する。これにより、T/M20の出力軸A3とM/G40の出力軸A4との間でもT/M20の入力軸A2とM/G40の出力軸A4との間でも動力伝達系統が形成されない。この状態を「ニュートラル状態」と呼ぶ。
【0045】
以上、切替機構50では、切替アクチュエータ55を制御する(従って、スリーブ54の位置を制御する)ことで、M/G40の出力軸A4の接続状態(以下、「M/G接続状態」とも称呼する。)を、「IN接続状態」、「OUT接続状態」、「ニュートラル状態」の何れかに選択的に切り替え可能となっている。
【0046】
T/M20の出力軸A3は、作動機構D/Fと連結されていて、作動機構D/Fは、左右一対の駆動輪と連結されている。なお、T/M20の出力軸A3と作動機構D/Fとの間に、所謂最終減速機構が介装されていてもよい。
【0047】
制動力制御装置60は、複数の電磁弁、液圧ポンプ、電気モータ等を備えた周知の構成を有している。非制御時では、制動力制御装置60は、運転者によるブレーキペダルBPの操作に応じた制動圧力を各車輪のホイールシリンダにそれぞれ供給し、各車輪に対してBPの操作に応じた制動力(制動トルク)をそれぞれ与える。以下、BPの操作に応じた制動力を「ブレーキ操作対応制動力」とも呼ぶ。
【0048】
加えて、制動力制御装置60は、ブレーキペダルBPの操作にかかわらず(操作がなされていないときでも)、ホイールシリンダ内の制動圧力を車輪毎に制御し、制動力を車輪毎に調整できるようになっている。即ち、ブレーキ操作対応制動力よりも大きい制動力が付与可能となっている。なお、制動力の調整は、制動圧力によるものに限らず、電気ブレーキ装置を利用して行うことも可能である。
【0049】
また、本装置は、駆動輪の車輪速度を検出する車輪速度センサ71と、アクセルペダルAPの操作量(アクセル開度)を検出するアクセル開度センサ72と、シフトレバーSFの位置を検出するシフト位置センサ73と、ブレーキペダルBPの操作の有無を検出するブレーキセンサ74と、を備えている。
【0050】
更に、本装置は、電子制御ユニットECU80を備えている。ECU80は、上述のセンサ71〜74、並びにその他のセンサ等からの情報等に基づいて、上述のアクチュエータ21,31,55を制御することで、T/M20の変速段、C/T30の状態、及び切替機構50の状態を制御する。加えて、ECU70は、E/G10、及びM/G40のそれぞれの出力(駆動トルク、回生トルク)、並びに、各車輪の制動力を制御するようになっている。
【0051】
T/M20の変速段は、車輪速度センサ71から得られる車速Vと、アクセル開度センサ72から得られる運転者によるアクセルペダルAPの操作量に基づいて算出される要求トルクTr(駆動輪についてのトルク)と、シフト位置センサ73から得られるシフトレバーSFの位置に基づいて制御される。シフトレバーSFの位置が「手動モード」に対応する位置にある場合、T/M20の変速段が、シフトレバーSFの操作により運転者により選択された変速段に原則的に設定される。一方、シフトレバーSFの位置が「自動モード」に対応する位置にある場合、T/M20の変速段が、車速Vと要求トルクTrとの組み合わせ等に基づいて、シフトレバーSFが操作されることなく自動的に制御される。以下、T/M20の変速段が変更される際の作動を「変速作動」と称呼する。変速作動の開始は、変速段の変更に関連して移動する部材の移動の開始に対応し、変速作動の終了は、その部材の移動の終了に対応する。
【0052】
C/T30は、通常、接合状態(特に、完全接合状態)に維持され、T/M20の変速作動中、シフトレバーSFの位置が「ニュートラル」位置にある場合、後述するEV発進時等において、遮断状態に維持される。また、C/T30は、接合状態(特に、半接合状態)において、C/Tアクチュエータ31により調整されるクラッチストロークに応じて、伝達し得るトルクの最大値(以下、「クラッチトルクTc」と称呼する。)を調整可能となっている。
【0053】
E/G10の出力軸A1のトルクそのものよりもクラッチトルクTcの方がより緻密に調整され得る。従って、E/G10の出力軸A1の駆動トルクがクラッチトルクTcよりも大きい状態を維持しつつクラッチトルクTcを制御することで、E/G10の出力軸A1のトルクに基づくT/M20の入力軸A2に伝達されるトルクをクラッチトルクTcと一致するように緻密に調整できる。
【0054】
M/G40は、E/G10と協働又は単独で、車両を駆動する駆動トルクを発生する動力源として、或いは、E/G10を始動するための動力源として使用される。また、M/G40は、車両を制動する回生トルクを発生する発電機として、或いは、車両のバッテリ(図示せず)に供給・貯留される電気エネルギを発生する発電機としても使用される。
【0055】
以下、E/G10の出力軸A1のトルクを「E/Gトルク」と、M/G40の出力軸A4のトルクを「M/Gトルク」と称呼する。E/G10の出力軸A1の回転速度を「E/G回転速度」と、M/G40の出力軸A4の回転速度を「M/G回転速度」と称呼する。また、E/Gトルクに基づく駆動輪に伝達される駆動トルク(車両加速方向において正)を「E/G駆動トルク」と称呼する。また、M/G40が車両駆動用の動力源として使用される場合における、M/Gトルクに基づく駆動輪に伝達される駆動トルク(車両加速方向において正)を「M/G駆動トルク」と称呼し、M/G40が車両制動用の発電機として使用される場合における、M/Gトルクに基づく駆動輪に伝達される回生トルク(車両減速方向において正)を「M/G回生トルク」と称呼する。
【0056】
E/G駆動トルクは、(C/T30が完全接合状態にある場合において)E/Gトルクに変速機減速比Gtmを乗じた値である。M/G駆動トルク及びM/G回生トルクは、IN接続状態では、M/GトルクにIN接続減速比Ginを乗じた値であり、OUT接続状態では、M/GトルクにOUT接続減速比Goutを乗じた値である。M/G駆動トルクは、M/Gトルクの調整により調整され得、E/G駆動トルクは、E/Gトルク、或いはクラッチトルクの調整により調整され得る。
【0057】
本装置では、通常、周知の手法の1つに従って、E/G駆動トルクとM/G駆動トルクの和が要求トルクTrと一致するように、E/GトルクとM/Gトルクとの配分が調整される。E/GトルクとM/Gトルクとの配分は、車両の走行状態(例えば、車速Vと要求トルクTr)に基づいて調整される。
【0058】
切替機構50では、スリーブ54が移動することで、M/G接続状態が切り替えられる。以下、このスリーブ54の移動を「切り替え作動」と称呼する。切り替え作動の開始は、スリーブ54の移動の開始に対応し、切り替え作動の終了は、スリーブ54の移動の終了に対応する。M/G接続状態の切り替えは、例えば、車速Vと要求トルクTrとの組み合わせに基づいてなされ得る。
【0059】
(EV発進)
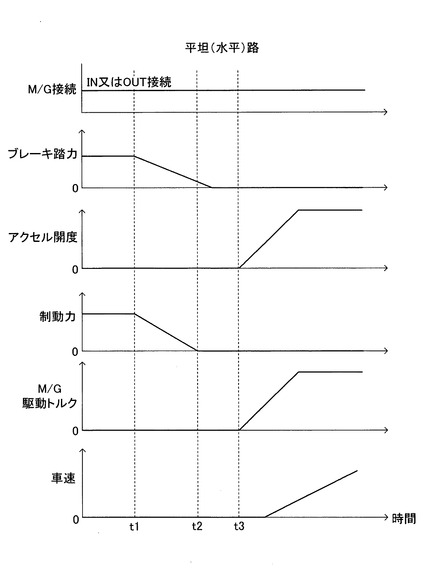
本装置では、E/G駆動トルクを利用することなくM/G駆動トルクのみを利用して車両が発進し得る。ここで、「発進」とは、車両が停止状態から前進状態に移行することを意味する。以下、このような発進を「EV発進」と呼ぶ。EV発進では、C/T30が遮断状態とされ、E/G10が停止(出力軸A1の回転が停止)している。EV発進は、IN接続状態でもOUT接続状態でも達成し得る。IN接続状態では、T/M20の変速段が、通常「1速」に選択され、OUT接続状態では、T/M20の変速段が、通常「ニュートラル段」に選択される。EV発進では、アクセルペダルAPの踏み込み開始から、アクセル開度に応じたM/G駆動トルクが駆動輪に付与開始される。
【0060】
図3は、平坦路(水平路)にて車両がEV発進する場合における作動の一例を示す。この例では、時刻t1以前にて、IN又はOUT接続状態にてブレーキペダルBPが踏み込まれて車両が停止している状態にて、時刻t1にて、EV発進に向けた作動が開始される場合が示されている。以下、ブレーキペダルBPを踏み込む力を「ブレーキ踏力」と呼ぶ。
【0061】
具体的には、この例では、時刻t1以降、運転者がブレーキペダルBPを徐々に解放することで、ブレーキ踏力がゼロに向けて減少していく。これに伴い、時刻t1以降、ブレーキ操作対応制動力(制動トルク)が減少していき、時刻t2にてブレーキ操作対応制動力がゼロに達する。その後、運転者が、足をブレーキペダルBPからアクセルペダルAPへと移動し、時刻t3にてアクセルペダルAPを踏み込み開始する。これに伴い、時刻t3以降、アクセル開度がゼロから増大していき、従って、M/G駆動トルクもゼロから増大していく。この結果、時刻t3の直後にて車速がゼロから増大する。即ち、EV発進がなされる。
【0062】
このように、EV発進がなされる場合、通常、制動力の付与終了(時刻t2)からM/G駆動トルクの付与開始(時刻t3)までの間に、制動力(制動トルク)もM/G駆動トルクも付与されない期間(以下、「制駆動トルクなし期間」と呼ぶ。)が発生し得る(時刻t2〜t3)。
【0063】
図3に示す例のように、平坦路(水平路)にてEV発進がなされる場合、「制駆動トルクなし期間」に亘って車両が停止状態に維持され得る。しかしながら、登坂路にてEV発進がなされる場合、車両に作用する重力における車両後進方向の成分に起因して、発進前において、車両が一時的に後進する現象が発生し得る。以下、この現象を「発進前の一時的な後進(ずり下がり)」と呼ぶ。また、降坂路にてEV発進がなされる場合、車両に作用する重力における車両前進方向の成分に起因して、発進直後において、車速が急激に増大する現象が発生し得る。以下、この現象を「発進直後の車速の急激な増大」と呼ぶ。
【0064】
本装置では、「制駆動トルクなし期間」に亘ってM/G駆動トルク又はM/G回生トルクが付与されることで、上述した登坂路での「発進前の一時的な後進」の発生、並びに、降坂路での「発進直後の車速の急激な増大」の発生が抑制される。以下、このことについて、図4〜図6を参照しながら説明する。図4〜図6に示す時刻t1〜t3はそれぞれ、図3に示す時刻t1〜t3に対応する。図4〜図6に示す運転者のブレーキペダルBP及びアクセルペダルAPの操作パターンは、図3に示すものと全く同じである。
【0065】
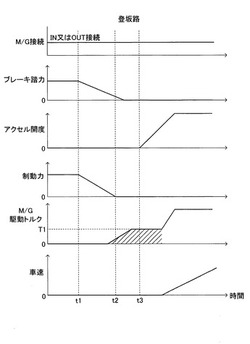
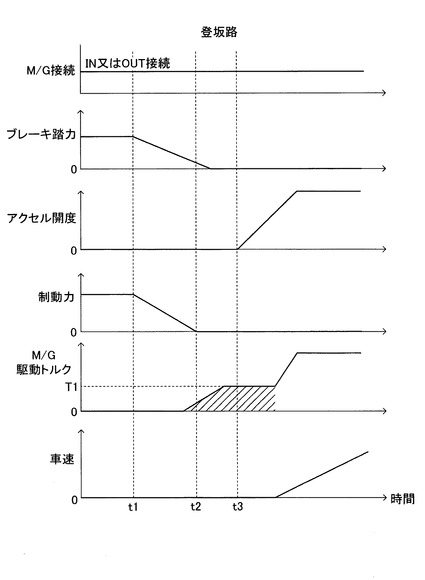
(登坂路でのEV発進)
以下、先ず、登坂路での「発進前の一時的な後進」の発生の抑制について、図4を参照しながら説明する。本装置では、ブレーキペダルBPが踏み込まれて車両が停止している状態にて、路面が「登坂路」であるか否かが判定される。ここで、「登坂路」とは、本例では、その勾配が「制駆動トルクなし期間」において車両が後進しない範囲の上限値以上の路面を指す。「登坂路」では、「制駆動トルクなし期間」にて車両が後進し得る。路面の勾配は、停止中の車両に作用する車体前後方向の加速度等に基づいて、周知の手法の1つにより取得され得る。
【0066】
「登坂路」と判定されている状態にて、車両停止状態にてブレーキ操作対応制動力のゼロに向けた減少傾向が検出されたとき、M/G駆動トルクが付与開始される。「ブレーキ操作対応制動力のゼロに向けた減少傾向」は、本例では、ブレーキ操作対応制動力が所定値(微小値)を減少しながら通過した場合、ブレーキ操作対応制動力の減少速度(>0)が所定値以上の場合等に検出され得る。図4に示す例では、時刻t2の直前の時点からM/G駆動トルクが付与開始されている。
【0067】
付与開始されたM/G駆動トルクは値T1(>0)まで増大され、T1に達した後、T1に維持される。そして、時刻t3の後の時点からM/G駆動トルクがアクセル開度に応じて増大されていく。この結果、EV発進がなされる。
【0068】
このように、ブレーキ操作対応制動力がゼロに達する時点(時刻t2)の前の時点から、ブレーキ操作対応制動力がゼロに達した後(時刻t2後)であってアクセルペダル操作が開始された時点(時刻t3)の後の時点までに亘って(従って、少なくとも「制駆動トルクなし期間」に亘って)、M/G駆動トルク(斜線で示した領域を参照)が駆動輪に付与され続ける。この結果、「発進前の一時的な後進」の発生が抑制され得る。従って、登坂路にて運転者に違和感を与えることなくEV発進が実行され得る。
【0069】
ここで、値T1は、「制駆動トルクなし期間」にて車両が後進しない範囲内で最も小さい値に設定されることが好ましい。この場合、値T1は、登坂路の勾配が小さいほどより小さい値に設定される。これにより、「発進前の一時的な後進」の発生抑制のために不必要に大きいM/G駆動トルクが付与されることが抑制される。
【0070】
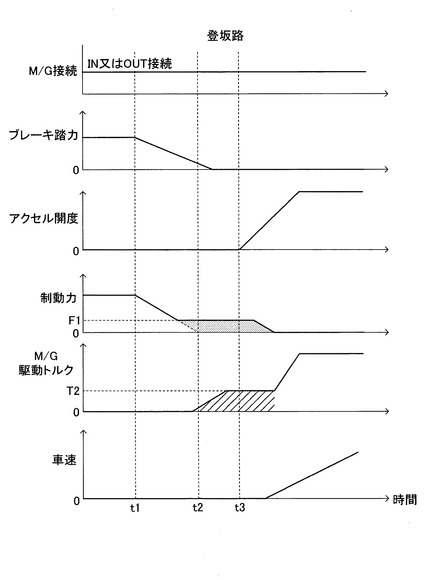
また、図5に示すように、少なくとも「制駆動トルクなし期間」(時刻t2〜t3)に亘って、M/Gトルクのみならず、制動力が付与されてもよい。この制動力は、ブレーキ操作対応制動力(=0)よりも大きい。図5に示す例では、M/G駆動トルクが付与開始される時点よりも前の時点以降、制動力が値F1で一定に維持されている。M/G駆動トルクが維持される値T2は、付与される制動力の分だけ図4に示す値T1よりも小さい。なお、制動力がF1に維持開始される時点とM/G駆動トルクが付与開始される時点とが一致していてもよい。
【0071】
制動力のF1での維持は、時刻t3の後の時点まで継続される。その後、制動力がF1からゼロまで減少されつつ、M/G駆動トルクがアクセル開度に応じて増大されていく。この結果、EV発進がなされる。
【0072】
このように、ブレーキ操作対応制動力がゼロに達する時点(時刻t2)の前の時点から、ブレーキ操作対応制動力がゼロに達した後(時刻t2後)であってアクセルペダル操作が開始された時点(時刻t3)の後の時点までに亘って(従って、少なくとも「制駆動トルクなし期間」に亘って)、M/G駆動トルク(斜線で示した領域を参照)のみならず、ブレーキ操作対応制動力よりも大きい制動力(微細なドットで示した領域を参照)が駆動輪に付与され続ける。これによっても、「発進前の一時的な後進」の発生が抑制され得る。
【0073】
ここで、値T2及び値F1も、「制駆動トルクなし期間」にて車両が後進しない範囲内で最も小さい値に設定されることが好ましい。この場合、値T2及びF1は、登坂路の勾配が小さいほどより小さい値に設定される。これにより、「発進前の一時的な後進」の発生抑制のために不必要に大きいM/G駆動トルク及び制動力が付与されることが抑制される。
【0074】
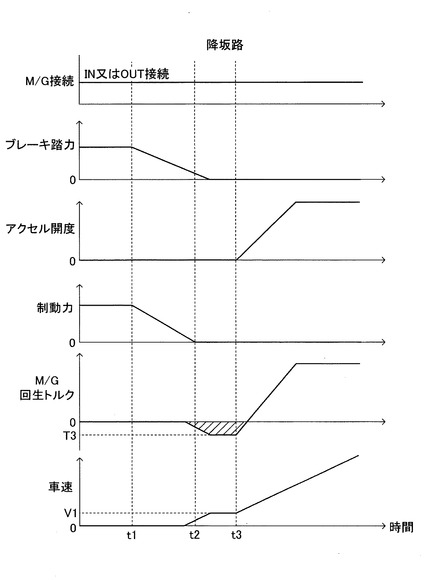
(降坂路でのEV発進)
次に、降坂路での「発進直後の車速の急激な増大」の発生の抑制について、図6を参照しながら説明する。本装置では、ブレーキペダルBPが踏み込まれて車両が停止している状態にて、路面が「降坂路」であるか否かが判定される。ここで、「降坂路」とは、本例では、その勾配(>0)が「制駆動トルクなし期間」において発進後の車速が急激に増大しない範囲の上限値以上の路面を指す。「降坂路」では、「制駆動トルクなし期間」にて発進後の車速が急激に増大し得る。
【0075】
「降坂路」と判定されている状態にて、車両停止状態にてブレーキ操作対応制動力のゼロに向けた減少傾向が検出されたとき、M/G回生トルクが付与開始される。図6では、M/G回生トルクが負の値で示されている。「ブレーキ操作対応制動力のゼロに向けた減少傾向」は、図4、図5に示した例の場合と同じように検出される。図6に示す例では、時刻t2の直前の時点からM/G回生トルクが付与開始されている。また、図6に示す例では、時刻t2の直前の時点(即ち、M/G回生トルクが付与開始される時点の近傍)にて、車両に作用する重力における車両後進方向の成分に起因して、車両が発進している。
【0076】
付与開始されたM/G回生トルクは、車速が所定値(微小値)V1に達する時点、或いは、M/G回生トルクの大きさが所定値に達する時点まで増大され、その後、一定に維持される。図6に示す例では、M/G回生トルクの大きさは、値(−T3)で一定に維持されている。この間、図6に示す例では制動力が付与されていないが、制動力(即ち、ブレーキ操作対応制動力よりも大きい制動力)が付与されてもよい。この制動力の大きさは、M/G回生トルクが付与されない場合において「発進直後の車速の急激な増大」の発生抑制のためにブレーキペダル操作により付与されるブレーキ操作対応制動力の大きさよりも小さい。
【0077】
そして、時刻t3以降、M/G回生トルクの大きさがゼロまで減少されていく。この結果、所定値(微小値)V1に維持されてきた車速が徐々に(緩やかに)増大していく。M/G回生トルクの大きさがゼロまで達した後、M/G回生トルクに代えてM/G駆動トルクがアクセル開度に応じて増大されていく。この結果、車両の加速が継続される。なお、M/G回生トルクの大きさの減少開始時点は、時刻t3以降の時点であってもよい。
【0078】
このように、ブレーキ操作対応制動力がゼロに達する時点(時刻t2)の前の時点から、ブレーキ操作対応制動力がゼロに達した後(時刻t2後)であってアクセルペダル操作が開始された時点(時刻t3)の後の時点までに亘って(従って、少なくとも「制駆動トルクなし期間」に亘って)、M/G回生トルク(斜線で示した領域を参照)が駆動輪に付与され続ける。この結果、「発進直後の車速の急激な増大」の発生が抑制され得る。従って、降坂路にて運転者に違和感を与えることなくEV発進(正確には、重力の作用による発進)が実行され得る。
【0079】
ここで、値(−T3)(>0)は、上述のように、車速が所定値V1に維持される状態に対応する値に設定され得る。この場合、値(−T3)は、降坂路の勾配(>0)が小さいほどより小さい値に設定される。これにより、降坂路の勾配にかかわらず、「発進直後の車速の急激な増大」の発生抑制のため、ひいては、車速を所定値V1で一定に維持するために要求される適切な大きさのM/G回生トルクが付与され得る。
【0080】
なお、M/G回生トルクが付与されている間において、車両が(重力の作用により)発進しないとき、或いは、車速が所定値V1に達しないとき、M/G回生トルクの大きさが減少されることが好ましい。また、上記所定値V1は、降坂路の勾配(>0)が大きいほどより大きい値に設定されてもよい。これにより、降坂路の勾配に応じたより違和感の少ない発進がなされ得る。
【0081】
また、M/G回生トルクが付与されている間、このM/G回生トルクに基づいてM/G40にて発電される電力を利用して、M/G40に電気エネルギを供給するバッテリ(図示せず)が充填されてもよい。これにより、車両全体としての総合的なエネルギ効率(燃費)を良くすることができる。
【0082】
本発明は上記実施形態に限定されることはなく、本発明の範囲内において種々の変形例を採用することができる。例えば、上記実施形態では、動力源としてE/G10とM/G40とを備えた車両が使用されているが、動力源としてM/G40のみを備えた車両が使用されてもよい。また、上記実施形態では、T/M20が備えられているが、T/M20が省略されていてもよい。
【0083】
また、上記実施形態では、切替機構50として、IN接続状態、OUT接続状態、及びニュートラル状態の何れにも切り替え可能なものが使用されているが、切替機構50として、IN接続状態、及びニュートラル状態のみに切り替え可能なものが使用されてもよい。この場合、IN接続状態にてEV発進がなされる。同様に、切替機構50として、OUT接続状態、及びニュートラル状態のみに切り替え可能なものが使用されてもよい。この場合、OUT接続状態にてEV発進がなされる。また、切替機構50そのものが省略されて、IN接続状態又はOUT接続状態が常時達成されていてもよい。
【0084】
また、上記実施形態では、変速機としてトルクコンバータを備えない多段変速機を使用した所謂オートメイティッド・マニュアル・トランスミッションが使用されているが、変速機として、トルクコンバータを備えるとともに車両の走行状態に応じて変速作動が自動的に実行される多段変速機又は無段変速機(所謂オートマチックトランスミッション(AT))が使用されてもよい。
【0085】
加えて、EV発進がなされる場合において、路面の勾配に応じて、IN接続状態とOUT接続状態の何れを選択するかが決定されてもよい。以下、この点について述べる。M/G40の出力軸A4のトルクに基づく駆動輪に伝達されるトルクの最大値を「M/G出力最大トルク」と定義する。
【0086】
EV発進時における「M/G出力最大トルク」は、IN接続状態では、「M/G回転速度=0でのM/Gトルクの最大値」に「IN接続減速比Gin」を乗じた値に一致し、OUT接続状態では、「M/G回転速度=0でのM/Gトルクの最大値」に「OUT接続減速比Gout」を乗じた値に一致する。従って、EV発進時における「IN接続減速比Gin」と「OUT接続減速比Gout」とが異なる場合、IN接続状態とOUT接続状態とでは、「M/G出力最大トルク」が異なる。加えて、登坂路(降坂路)の勾配が大きいほど、より大きいM/G駆動トルク(M/G回生トルク)が必要とされる。
【0087】
以上より、EV発進時にて、路面の勾配が所定値(>0)以上の場合にはIN又はOUT接続状態のうちで「M/G出力最大トルク」が大きい方の接続状態が選択され、路面の勾配が前記所定値未満の場合にはIN又はOUT接続状態のうちで「M/G出力最大トルク」が小さい方の接続状態が選択され得る。例えば、OUT接続減速比Goutが変速機減速比Gtmの「2速」に対応する値の近傍に設定され、IN接続状態でのEV発進時にて変速段として「1速」が原則的に選択されるものとする。この場合、EV発進時にて、Gin>Goutの関係が成立する。従って、路面の勾配が所定値(>0)以上の場合にはIN接続状態が選択され、路面の勾配が前記所定値未満の場合にはOUT接続状態が選択され得る。
【符号の説明】
【0088】
10…エンジン、20…変速機、30…クラッチ、40…モータジェネレータ、50…切替機構、60…制動力制御装置、71…車輪速度センサ、72…アクセル開度センサ、73…シフト位置センサ、74…ブレーキセンサ、70…ECU、AP…アクセルペダル、BP…アクセルペダル、SF…シフトレバー
【技術分野】
【0001】
本発明は、車両の動力伝達制御装置に関し、特に、動力源として少なくとも電動機を備えた車両に適用されるものに係わる。
【背景技術】
【0002】
近年、動力源として内燃機関と電動機(電動モータ、電動発電機)とを備えた所謂ハイブリッド車両が開発されてきている(例えば、特許文献1を参照)。ハイブリッド車両では、電動機が、内燃機関と協働又は単独で、車両を駆動する駆動トルクを発生する動力源として、或いは、内燃機関を始動するための動力源として使用される。加えて、電動機が、車両を制動する回生トルクを発生する発電機として、或いは、車両のバッテリに供給・貯留される電気エネルギを発生する発電機として使用される。このように電動機を使用することで、車両全体としての総合的なエネルギ効率(燃費)を良くすることができる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−224710号公報
【発明の概要】
【0004】
ところで、ハイブリッド車両では、電動機の出力軸と変速機の入力軸との間で動力伝達系統が形成される接続状態(以下、「IN接続状態」と称呼する。)が採用される場合と、電動機の出力軸と変速機の出力軸(従って、駆動輪)との間で変速機を介することなく動力伝達系統が形成される接続状態(以下、「OUT接続状態」と称呼する。)が採用される場合と、がある。
【0005】
IN接続状態では、変速機の変速段を変更することで、車両速度に対する電動機の出力軸の回転速度を変更することができる。従って、変速機の変速段を調整することで、電動機の出力軸の回転速度をエネルギ変換効率(より具体的には、駆動トルク、回生トルク等の発生効率)が良好となる範囲内に維持し易いというメリットがある。
【0006】
一方、OUT接続状態では、動力伝達系統が複雑な機構を有する変速機を介さないことから、動力の伝達損失を小さくできるというメリットがある。また、変速機(特に、トルクコンバータを備えない形式の変速機)では、通常、変速作動中(変速段を切り替える作動中)において、変速機の入力軸から出力軸への動力の伝達が一時的に遮断される場合が多い。この結果、車両前後方向の加速度の急激な変化(所謂変速ショック)が発生し易い。このような変速作動中においても、OUT接続状態では、電動機の駆動トルクを変速機の出力軸(従って、駆動輪)へ連続して出力し続けることができ、変速ショックを低減できるというメリットもある。
【0007】
以上のことに鑑み、本出願人は、特願2007−271556号において、電動機の出力軸の接続状態(以下、単に「電動機接続状態」とも称呼する。)をIN接続状態とOUT接続状態とに切り替え可能な切替機構について既に提案している。この切替機構では、電動機の出力軸と変速機の入力軸との間も電動機の出力軸と変速機の出力軸との間も動力伝達系統が形成されない接続状態(以下、「非接続状態」と称呼する。)も選択され得る。
【0008】
ところで、ハイブリッド車両では、内燃機関の駆動トルクを利用することなく電動機の駆動トルクのみを利用して車両が発進し得る。以下、このような発進を「電動機発進」と呼ぶ。電動機発進は、IN接続状態でもOUT接続状態でも達成し得る。電動機発進では、アクセルペダルの踏み込み開始から電動機の駆動トルクが駆動輪に付与開始される。
【0009】
通常、電動機発進時では、運転者は、ブレーキペダルを踏み込んで車両が停止している状態にて、先ず、ブレーキペダルを解放し、その後、アクセルペダルを踏み込むことで、車両を発進させる。従って、ブレーキペダルの解放(従って、制動力の付与終了)からアクセルペダルの踏み込み開始(従って、駆動トルクの付与開始)までの間に、制動力(制動トルク)も駆動トルクも付与されない期間(以下、「制駆動トルクなし期間」と呼ぶ。)が存在する。
【0010】
この「制駆動トルクなし期間」の存在により、登坂路にて電動機発進が行われる場合、発進前において、車両が一時的に後進する現象が発生し得る。以下、この現象を「発進前の一時的な後進(ずり下がり)」と呼ぶ。また、降坂路にて電動機発進が行われる場合、発進直後において、車速が急激に増大する現象が発生し得る。以下、この現象を「発進直後の車速の急激な増大」と呼ぶ。どちらの現象も運転者に違和感を与える。
【0011】
本発明の目的は、動力源として少なくとも電動機を備えた車両に適用される車両の動力伝達制御装置であって、登坂路又は降坂路にて運転者に違和感を与えることなく電動機発進を行うことができるものを提供することにある。
【0012】
本発明による車両の動力伝達制御装置は、前記車両の運転者により操作される加速操作部材の操作を検出する検出手段と、前記電動機の出力軸のトルクに基づく車両加速方向(前進方向)の駆動トルクである電動機駆動トルクを前記加速操作部材の操作に応じて前記車両の駆動輪に付与する電動機トルク制御手段と、前記車両の運転者により操作される制動操作部材の操作に応じた制動力である制動操作対応制動力を前記車両の車輪に付与する制動力制御手段と、前記車両が停止している路面が登坂路か否かを判定する判定手段とを備える。
【0013】
ここにおいて、前記判定手段は、例えば、登坂路の勾配が所定値以上の場合に「登坂路」と判定する。この所定値は、例えば、「制駆動トルクなし期間」において車両が後進しない範囲の上限値以上の値である。
【0014】
本発明による動力伝達制御装置の特徴は、前記電動機トルク制御手段が、前記路面が登坂路であると判定されている場合であって、且つ、前記制動操作対応制動力により前記車両が停止している状態にて前記制動操作対応制動力のゼロに向けた減少傾向が検出されたとき、前記制動操作対応制動力がゼロに達する時点の前の時点から、前記制動操作対応制動力がゼロに達した後であって前記加速操作部材の操作が開始された時点の後の時点までに亘って、前記電動機駆動トルクを前記駆動輪に付与するように構成されたことにある。
【0015】
ここにおいて、「制動操作対応制動力のゼロに向けた減少傾向」は、例えば、制動操作対応制動力が所定値(微小値)を減少しながら通過した場合、制動操作対応制動力の減少速度が所定値以上の場合等に検出され得る。
【0016】
上記構成によれば、「制駆動トルクなし期間」に亘って電動機駆動トルク(=車両加速方向のトルク)が駆動輪に付与され続ける。従って、電動機駆動トルクの大きさを適切に調整することで、「発進前の一時的な後進」の発生が抑制され得る。従って、登坂路にて運転者に違和感を与えることなく電動機発進が実行され得る。
【0017】
この場合、前記電動機トルク制御手段は、前記登坂路の勾配又は前記登坂路の勾配に相関する値が大きいほど、前記駆動輪に付与される前記電動機駆動トルクをより大きい値に調整するように構成されることが好適である。ここにおいて、前記登坂路の勾配に相関する値とは、例えば、停止中の車両に作用する車体前後方向の加速度等である。
【0018】
登坂路の勾配が大きいほど、車両に作用する重力における車両後進方向の成分の大きさが大きい。従って、上記構成によれば、登坂路の勾配にかかわらず、電動機駆動トルクの大きさが「発進前の一時的な後進」の抑制のために必要な適切な大きさに調整され得る。
【0019】
また、上記動力伝達制御装置においては、前記制動力制御手段は、前記制動操作対応制動力よりも大きい制動力を前記車輪に付与可能に構成されていて、前記制動力制御手段は、前記制動操作対応制動力がゼロに達する時点の前の時点から、前記制動操作対応制動力がゼロに達した後であって前記加速操作部材の操作が開始された時点の後の時点までに亘って、前記制動操作対応制動力よりも大きい制動力を前記車輪に付与するように構成され得る。
【0020】
これによれば、「制駆動トルクなし期間」に亘って電動機駆動トルクに加えて制動力が付与され続ける。従って、電動機駆動トルクのみが付与される場合に比して「発進前の一時的な後進」の発生がより確実に抑制され得る。
【0021】
次に、前記電動機トルク制御手段が、前記電動機駆動トルクのみならず、前記電動機の出力軸のトルクに基づく車両減速方向(後進方向)の回生トルクである電動機回生トルクを前記車両の駆動輪に付与するように構成されている場合であって、判定手段が、前記車両が停止している路面が降坂路か否かを判定するように構成されている場合を考える。ここにおいて、前記判定手段は、例えば、降坂路の勾配が所定値以上の場合に「降坂路」と判定する。この所定値は、例えば、「制駆動トルクなし期間」において発進後の車速が急激に増大しない範囲の上限値以上の値である。
【0022】
この場合、前記電動機トルク制御手段は、前記路面が降坂路であると判定されている場合であって、且つ、前記制動操作対応制動力により前記車両が停止している状態にて前記制動操作対応制動力のゼロに向けた減少傾向が検出されたとき、前記制動操作対応制動力がゼロに達する時点の前の時点から、前記制動操作対応制動力がゼロに達した後であって前記加速操作部材の操作が開始された時点の後の時点までに亘って、前記電動機回生トルクを前記駆動輪に付与するように構成され得る。
【0023】
上記構成によれば、「制駆動トルクなし期間」に亘って電動機回生トルク(=車両減速方向のトルク)が駆動輪に付与され続ける。従って、電動機回生トルクの大きさを適切に調整することで、「発進直後の車速の急激な増大」の発生が抑制され得る。より具体的には、発進直後の車速の上昇の推移が適正に調整され得る。従って、降坂路にて運転者に違和感を与えることなく電動機発進が実行され得る。
【0024】
この場合、前記電動機トルク制御手段は、前記降坂路の勾配又は前記降坂路の勾配に相関する値が大きいほど、前記駆動輪に付与される前記電動機回生トルクをより大きい値に調整するように構成されることが好適である。ここにおいて、前記降坂路の勾配に相関する値とは、例えば、停止中の車両に作用する車体前後方向の加速度等である。
【0025】
降坂路の勾配が大きいほど、車両に作用する重力における車両前進方向の成分の大きさが大きい。従って、上記構成によれば、降坂路の勾配にかかわらず、電動機回生トルクの大きさが「発進直後の車速の急激な増大」の抑制のために必要な適切な大きさに調整され得る。換言すれば、降坂路の勾配にかかわらず、発進直後の車速の上昇の推移が適正に調整され得る。
【0026】
また、この場合、前記電動機トルク制御手段は、前記駆動輪に付与される前記電動機回生トルクに基づいて前記電動機にて発電される電力を利用して、前記電動機に電気エネルギを供給する電池を充填するように構成されることが好適である。これによれば、電池の充填がなされない場合に比して、車両全体としての総合的なエネルギ効率(燃費)を良くすることができる。
【0027】
以上、本発明に係る動力伝達制御装置は、動力源として前記電動機に加えて内燃機関を備えた車両にも適用され得る。また、この動力伝達制御装置は、前記内燃機関の出力軸との間で動力伝達系統が形成される入力軸と、前記車両の駆動輪との間で動力伝達系統が形成される出力軸とを備え、前記出力軸の回転速度に対する前記入力軸の回転速度の割合である変速機減速比を調整可能な変速機と、前記電動機の出力軸の接続状態を、前記電動機の出力軸と前記変速機の入力軸との間で動力伝達系統が形成されるIN接続状態と、前記電動機の出力軸と前記変速機の出力軸との間で前記変速機を介することなく動力伝達系統が形成されるOUT接続状態と、前記電動機の出力軸と前記変速機の入力軸との間も前記電動機の出力軸と前記変速機の出力軸との間も動力伝達系統が形成されない非接続状態と、のうちで少なくとも2以上の状態に切り替え可能な切替機構と、を備えることができる。
【0028】
この場合、前記電動機トルク制御手段は、前記切替機構によりIN接続状態又はOUT接続状態が選択された状態にて、前記電動機駆動トルク又は前記電動機回生トルクを前記駆動輪に付与するように構成される。
【0029】
なお、前記変速機は、前記変速機減速比として予め定められた異なる複数の減速比を設定可能な多段変速機であっても、前記変速機減速比として減速比を連続的に(無段階に)調整可能な無段変速機であってもよい。
【0030】
また、前記変速機は、トルクコンバータを備えるとともに車両の走行状態に応じて変速作動が自動的に実行される多段変速機又は無段変速機(所謂オートマチックトランスミッション(AT))であっても、トルクコンバータを備えない多段変速機(所謂マニュアルトランスミッション(MT))であってもよい。MTの場合、運転者によるシフトレバーの操作力により直接的に変速作動が実行される形式であっても、運転者により操作されるシフトレバーの位置を示す信号に基づいてアクチュエータの駆動力により変速作動が実行される形式であっても、運転者によるシフトレバー操作によらず車両の走行状態に応じてアクチュエータの駆動力により変速作動が自動的に実行され得る形式(所謂、オートメイティッド・マニュアル・トランスミッション)であってもよい。
【図面の簡単な説明】
【0031】
【図1】本発明の実施形態に係る車両の動力伝達制御装置を搭載した車両の概略構成図である。
【図2】図1に示した切替機構において切り替え可能な3状態を示した図である。
【図3】図1に示した装置が適用されて平坦路(水平路)にてEV発進がなされる場合における作動の一例を示したタイムチャートである。
【図4】図1に示した装置が適用されて登坂路にてEV発進がなされる場合における作動の一例を示したタイムチャートである。
【図5】図1に示した装置が適用されて登坂路にてEV発進がなされる場合における作動の他の一例を示したタイムチャートである。
【図6】図1に示した装置が適用されて降坂路にてEV発進がなされる場合における作動の一例を示したタイムチャートである。
【発明を実施するための形態】
【0032】
以下、本発明による車両の動力伝達制御装置の実施形態について図面を参照しつつ説明する。
【0033】
(構成)
図1は、本発明の実施形態に係る動力伝達制御装置(以下、「本装置」と称呼する。)を搭載した車両の概略構成を示している。この車両は、動力源として内燃機関とモータジェネレータとを備え、且つ、トルクコンバータを備えない多段変速機を使用した所謂オートメイティッド・マニュアル・トランスミッションを備えた車両に適用されている。
【0034】
この車両は、エンジン(E/G)10と、変速機(T/M)20と、クラッチ(C/T)30と、モータジェネレータ(M/G)40と、切替機構50と、制動力制御装置60を備えている。E/G10は、周知の内燃機関の1つであり、例えば、ガソリンを燃料として使用するガソリンエンジン、軽油を燃料として使用するディーゼルエンジンである。E/G10の出力軸A1は、C/T30を介してT/M20の入力軸A2と接続されている。
【0035】
T/M20は、前進用の複数(例えば、5つ)の変速段、後進用の1つの変速段、及びニュートラル段を有するトルクコンバータを備えない周知の多段変速機の1つである。以下、前進用の変速段及び後進用の変速段を「走行用変速段」と称呼する。走行用変速段では、T/M20の入出力軸A2,A3の間で動力伝達系統が形成される。ニュートラル段では、T/M20の入出力軸A2,A3の間で動力伝達系統が形成されない。走行用変速段において、T/M20は、出力軸A3の回転速度に対する入力軸A2の回転速度の割合である変速機減速比Gtmを複数の段階の何れかに任意に設定可能となっている。T/M20では、変速段の切り替えは、T/Mアクチュエータ21を制御することでのみ実行される。
【0036】
C/T30は、周知の構成の1つを備えていて、E/G10の出力軸A1とT/M20の入力軸A2との間で動力が伝達されない遮断状態、及び動力が伝達される接合状態に調整可能となっている。以下、説明の便宜上、接合状態において、T/M20の入力軸A2と出力軸A3との回転が一致している状態を「完全接合状態」と呼び、一致していない状態を「半接合状態」と呼ぶ。この車両では、クラッチペダルは設けられていない。C/T30の状態は、C/Tアクチュエータ31によりクラッチストロークを調整することで制御されるようになっている。
【0037】
M/G40は、周知の構成(例えば、交流同期モータ)の1つを有していて、例えば、ロータ(図示せず)が出力軸A4と一体回転するようになっている。M/G40は、動力源としても発電機としても機能する。
【0038】
切替機構50は、M/G40の出力軸A4の接続状態を切り替える機構である。切替機構50は、M/G40の出力軸A4と一体回転する連結ピース51と、ギヤg1と一体回転する連結ピース52と、ギヤg3と一体回転する連結ピース53と、スリーブ54と、切替アクチュエータ55とを備える。ギヤg1は、T/M20の入力軸A2と一体回転するギヤg2と常時歯合し、ギヤg3は、T/M20の出力軸A3と一体回転するギヤg4と常時歯合している。
【0039】
スリーブ54は、M/G40の出力軸A4の軸線方向に同軸的に移動可能に配設されていて、切替アクチュエータ55によりその軸線方向の位置が制御されるようになっている。スリーブ54は、連結ピース51,52,53とスプライン嵌合可能となっている。
【0040】
スリーブ54が図2(a)に示すIN接続位置に制御される場合、スリーブ54は、連結ピース51,52とスプライン嵌合する。これにより、ギヤg1,g2を介してT/M20の入力軸A2とM/G40の出力軸A4との間で動力伝達系統が形成される。この状態を「IN接続状態」と呼ぶ。
【0041】
IN接続状態において、T/M20の入力軸A2の回転速度に対するM/G40の出力軸A4の回転速度の割合を「第1減速比G1」と呼び、第1減速比G1と変速機減速比Gtmとの積(G1・Gtm)を「IN接続減速比Gin」と呼ぶ。本例では、G1=(g2の歯数)/(g1の歯数)であるから、Gin=(g2の歯数)/(g1の歯数)・Gtmとなる。即ち、Ginは、T/M20の変速段の変化に応じて変化する。
【0042】
また、スリーブ54が図2(b)に示すOUT接続位置に制御される場合、スリーブ54は、連結ピース51,53とスプライン嵌合する。これにより、ギヤg3、g4を介してT/M20の出力軸A3とM/G40の出力軸A4との間でT/M20を介することなく動力伝達系統が形成される。この状態を「OUT接続状態」と呼ぶ。
【0043】
OUT接続状態において、T/M20の出力軸A3の回転速度に対するM/G40の出力軸A4の回転速度の割合を「OUT接続減速比Gout」と呼ぶ。本例では、Goutは、(g4の歯数)/(g3の歯数)で一定となる。即ち、Goutは、T/M20の変速段の変化に応じて変化しない。
【0044】
また、スリーブ54が図2(c)に示す非接続位置に制御される場合、スリーブ54は、連結ピース51のみとスプライン嵌合する。これにより、T/M20の出力軸A3とM/G40の出力軸A4との間でもT/M20の入力軸A2とM/G40の出力軸A4との間でも動力伝達系統が形成されない。この状態を「ニュートラル状態」と呼ぶ。
【0045】
以上、切替機構50では、切替アクチュエータ55を制御する(従って、スリーブ54の位置を制御する)ことで、M/G40の出力軸A4の接続状態(以下、「M/G接続状態」とも称呼する。)を、「IN接続状態」、「OUT接続状態」、「ニュートラル状態」の何れかに選択的に切り替え可能となっている。
【0046】
T/M20の出力軸A3は、作動機構D/Fと連結されていて、作動機構D/Fは、左右一対の駆動輪と連結されている。なお、T/M20の出力軸A3と作動機構D/Fとの間に、所謂最終減速機構が介装されていてもよい。
【0047】
制動力制御装置60は、複数の電磁弁、液圧ポンプ、電気モータ等を備えた周知の構成を有している。非制御時では、制動力制御装置60は、運転者によるブレーキペダルBPの操作に応じた制動圧力を各車輪のホイールシリンダにそれぞれ供給し、各車輪に対してBPの操作に応じた制動力(制動トルク)をそれぞれ与える。以下、BPの操作に応じた制動力を「ブレーキ操作対応制動力」とも呼ぶ。
【0048】
加えて、制動力制御装置60は、ブレーキペダルBPの操作にかかわらず(操作がなされていないときでも)、ホイールシリンダ内の制動圧力を車輪毎に制御し、制動力を車輪毎に調整できるようになっている。即ち、ブレーキ操作対応制動力よりも大きい制動力が付与可能となっている。なお、制動力の調整は、制動圧力によるものに限らず、電気ブレーキ装置を利用して行うことも可能である。
【0049】
また、本装置は、駆動輪の車輪速度を検出する車輪速度センサ71と、アクセルペダルAPの操作量(アクセル開度)を検出するアクセル開度センサ72と、シフトレバーSFの位置を検出するシフト位置センサ73と、ブレーキペダルBPの操作の有無を検出するブレーキセンサ74と、を備えている。
【0050】
更に、本装置は、電子制御ユニットECU80を備えている。ECU80は、上述のセンサ71〜74、並びにその他のセンサ等からの情報等に基づいて、上述のアクチュエータ21,31,55を制御することで、T/M20の変速段、C/T30の状態、及び切替機構50の状態を制御する。加えて、ECU70は、E/G10、及びM/G40のそれぞれの出力(駆動トルク、回生トルク)、並びに、各車輪の制動力を制御するようになっている。
【0051】
T/M20の変速段は、車輪速度センサ71から得られる車速Vと、アクセル開度センサ72から得られる運転者によるアクセルペダルAPの操作量に基づいて算出される要求トルクTr(駆動輪についてのトルク)と、シフト位置センサ73から得られるシフトレバーSFの位置に基づいて制御される。シフトレバーSFの位置が「手動モード」に対応する位置にある場合、T/M20の変速段が、シフトレバーSFの操作により運転者により選択された変速段に原則的に設定される。一方、シフトレバーSFの位置が「自動モード」に対応する位置にある場合、T/M20の変速段が、車速Vと要求トルクTrとの組み合わせ等に基づいて、シフトレバーSFが操作されることなく自動的に制御される。以下、T/M20の変速段が変更される際の作動を「変速作動」と称呼する。変速作動の開始は、変速段の変更に関連して移動する部材の移動の開始に対応し、変速作動の終了は、その部材の移動の終了に対応する。
【0052】
C/T30は、通常、接合状態(特に、完全接合状態)に維持され、T/M20の変速作動中、シフトレバーSFの位置が「ニュートラル」位置にある場合、後述するEV発進時等において、遮断状態に維持される。また、C/T30は、接合状態(特に、半接合状態)において、C/Tアクチュエータ31により調整されるクラッチストロークに応じて、伝達し得るトルクの最大値(以下、「クラッチトルクTc」と称呼する。)を調整可能となっている。
【0053】
E/G10の出力軸A1のトルクそのものよりもクラッチトルクTcの方がより緻密に調整され得る。従って、E/G10の出力軸A1の駆動トルクがクラッチトルクTcよりも大きい状態を維持しつつクラッチトルクTcを制御することで、E/G10の出力軸A1のトルクに基づくT/M20の入力軸A2に伝達されるトルクをクラッチトルクTcと一致するように緻密に調整できる。
【0054】
M/G40は、E/G10と協働又は単独で、車両を駆動する駆動トルクを発生する動力源として、或いは、E/G10を始動するための動力源として使用される。また、M/G40は、車両を制動する回生トルクを発生する発電機として、或いは、車両のバッテリ(図示せず)に供給・貯留される電気エネルギを発生する発電機としても使用される。
【0055】
以下、E/G10の出力軸A1のトルクを「E/Gトルク」と、M/G40の出力軸A4のトルクを「M/Gトルク」と称呼する。E/G10の出力軸A1の回転速度を「E/G回転速度」と、M/G40の出力軸A4の回転速度を「M/G回転速度」と称呼する。また、E/Gトルクに基づく駆動輪に伝達される駆動トルク(車両加速方向において正)を「E/G駆動トルク」と称呼する。また、M/G40が車両駆動用の動力源として使用される場合における、M/Gトルクに基づく駆動輪に伝達される駆動トルク(車両加速方向において正)を「M/G駆動トルク」と称呼し、M/G40が車両制動用の発電機として使用される場合における、M/Gトルクに基づく駆動輪に伝達される回生トルク(車両減速方向において正)を「M/G回生トルク」と称呼する。
【0056】
E/G駆動トルクは、(C/T30が完全接合状態にある場合において)E/Gトルクに変速機減速比Gtmを乗じた値である。M/G駆動トルク及びM/G回生トルクは、IN接続状態では、M/GトルクにIN接続減速比Ginを乗じた値であり、OUT接続状態では、M/GトルクにOUT接続減速比Goutを乗じた値である。M/G駆動トルクは、M/Gトルクの調整により調整され得、E/G駆動トルクは、E/Gトルク、或いはクラッチトルクの調整により調整され得る。
【0057】
本装置では、通常、周知の手法の1つに従って、E/G駆動トルクとM/G駆動トルクの和が要求トルクTrと一致するように、E/GトルクとM/Gトルクとの配分が調整される。E/GトルクとM/Gトルクとの配分は、車両の走行状態(例えば、車速Vと要求トルクTr)に基づいて調整される。
【0058】
切替機構50では、スリーブ54が移動することで、M/G接続状態が切り替えられる。以下、このスリーブ54の移動を「切り替え作動」と称呼する。切り替え作動の開始は、スリーブ54の移動の開始に対応し、切り替え作動の終了は、スリーブ54の移動の終了に対応する。M/G接続状態の切り替えは、例えば、車速Vと要求トルクTrとの組み合わせに基づいてなされ得る。
【0059】
(EV発進)
本装置では、E/G駆動トルクを利用することなくM/G駆動トルクのみを利用して車両が発進し得る。ここで、「発進」とは、車両が停止状態から前進状態に移行することを意味する。以下、このような発進を「EV発進」と呼ぶ。EV発進では、C/T30が遮断状態とされ、E/G10が停止(出力軸A1の回転が停止)している。EV発進は、IN接続状態でもOUT接続状態でも達成し得る。IN接続状態では、T/M20の変速段が、通常「1速」に選択され、OUT接続状態では、T/M20の変速段が、通常「ニュートラル段」に選択される。EV発進では、アクセルペダルAPの踏み込み開始から、アクセル開度に応じたM/G駆動トルクが駆動輪に付与開始される。
【0060】
図3は、平坦路(水平路)にて車両がEV発進する場合における作動の一例を示す。この例では、時刻t1以前にて、IN又はOUT接続状態にてブレーキペダルBPが踏み込まれて車両が停止している状態にて、時刻t1にて、EV発進に向けた作動が開始される場合が示されている。以下、ブレーキペダルBPを踏み込む力を「ブレーキ踏力」と呼ぶ。
【0061】
具体的には、この例では、時刻t1以降、運転者がブレーキペダルBPを徐々に解放することで、ブレーキ踏力がゼロに向けて減少していく。これに伴い、時刻t1以降、ブレーキ操作対応制動力(制動トルク)が減少していき、時刻t2にてブレーキ操作対応制動力がゼロに達する。その後、運転者が、足をブレーキペダルBPからアクセルペダルAPへと移動し、時刻t3にてアクセルペダルAPを踏み込み開始する。これに伴い、時刻t3以降、アクセル開度がゼロから増大していき、従って、M/G駆動トルクもゼロから増大していく。この結果、時刻t3の直後にて車速がゼロから増大する。即ち、EV発進がなされる。
【0062】
このように、EV発進がなされる場合、通常、制動力の付与終了(時刻t2)からM/G駆動トルクの付与開始(時刻t3)までの間に、制動力(制動トルク)もM/G駆動トルクも付与されない期間(以下、「制駆動トルクなし期間」と呼ぶ。)が発生し得る(時刻t2〜t3)。
【0063】
図3に示す例のように、平坦路(水平路)にてEV発進がなされる場合、「制駆動トルクなし期間」に亘って車両が停止状態に維持され得る。しかしながら、登坂路にてEV発進がなされる場合、車両に作用する重力における車両後進方向の成分に起因して、発進前において、車両が一時的に後進する現象が発生し得る。以下、この現象を「発進前の一時的な後進(ずり下がり)」と呼ぶ。また、降坂路にてEV発進がなされる場合、車両に作用する重力における車両前進方向の成分に起因して、発進直後において、車速が急激に増大する現象が発生し得る。以下、この現象を「発進直後の車速の急激な増大」と呼ぶ。
【0064】
本装置では、「制駆動トルクなし期間」に亘ってM/G駆動トルク又はM/G回生トルクが付与されることで、上述した登坂路での「発進前の一時的な後進」の発生、並びに、降坂路での「発進直後の車速の急激な増大」の発生が抑制される。以下、このことについて、図4〜図6を参照しながら説明する。図4〜図6に示す時刻t1〜t3はそれぞれ、図3に示す時刻t1〜t3に対応する。図4〜図6に示す運転者のブレーキペダルBP及びアクセルペダルAPの操作パターンは、図3に示すものと全く同じである。
【0065】
(登坂路でのEV発進)
以下、先ず、登坂路での「発進前の一時的な後進」の発生の抑制について、図4を参照しながら説明する。本装置では、ブレーキペダルBPが踏み込まれて車両が停止している状態にて、路面が「登坂路」であるか否かが判定される。ここで、「登坂路」とは、本例では、その勾配が「制駆動トルクなし期間」において車両が後進しない範囲の上限値以上の路面を指す。「登坂路」では、「制駆動トルクなし期間」にて車両が後進し得る。路面の勾配は、停止中の車両に作用する車体前後方向の加速度等に基づいて、周知の手法の1つにより取得され得る。
【0066】
「登坂路」と判定されている状態にて、車両停止状態にてブレーキ操作対応制動力のゼロに向けた減少傾向が検出されたとき、M/G駆動トルクが付与開始される。「ブレーキ操作対応制動力のゼロに向けた減少傾向」は、本例では、ブレーキ操作対応制動力が所定値(微小値)を減少しながら通過した場合、ブレーキ操作対応制動力の減少速度(>0)が所定値以上の場合等に検出され得る。図4に示す例では、時刻t2の直前の時点からM/G駆動トルクが付与開始されている。
【0067】
付与開始されたM/G駆動トルクは値T1(>0)まで増大され、T1に達した後、T1に維持される。そして、時刻t3の後の時点からM/G駆動トルクがアクセル開度に応じて増大されていく。この結果、EV発進がなされる。
【0068】
このように、ブレーキ操作対応制動力がゼロに達する時点(時刻t2)の前の時点から、ブレーキ操作対応制動力がゼロに達した後(時刻t2後)であってアクセルペダル操作が開始された時点(時刻t3)の後の時点までに亘って(従って、少なくとも「制駆動トルクなし期間」に亘って)、M/G駆動トルク(斜線で示した領域を参照)が駆動輪に付与され続ける。この結果、「発進前の一時的な後進」の発生が抑制され得る。従って、登坂路にて運転者に違和感を与えることなくEV発進が実行され得る。
【0069】
ここで、値T1は、「制駆動トルクなし期間」にて車両が後進しない範囲内で最も小さい値に設定されることが好ましい。この場合、値T1は、登坂路の勾配が小さいほどより小さい値に設定される。これにより、「発進前の一時的な後進」の発生抑制のために不必要に大きいM/G駆動トルクが付与されることが抑制される。
【0070】
また、図5に示すように、少なくとも「制駆動トルクなし期間」(時刻t2〜t3)に亘って、M/Gトルクのみならず、制動力が付与されてもよい。この制動力は、ブレーキ操作対応制動力(=0)よりも大きい。図5に示す例では、M/G駆動トルクが付与開始される時点よりも前の時点以降、制動力が値F1で一定に維持されている。M/G駆動トルクが維持される値T2は、付与される制動力の分だけ図4に示す値T1よりも小さい。なお、制動力がF1に維持開始される時点とM/G駆動トルクが付与開始される時点とが一致していてもよい。
【0071】
制動力のF1での維持は、時刻t3の後の時点まで継続される。その後、制動力がF1からゼロまで減少されつつ、M/G駆動トルクがアクセル開度に応じて増大されていく。この結果、EV発進がなされる。
【0072】
このように、ブレーキ操作対応制動力がゼロに達する時点(時刻t2)の前の時点から、ブレーキ操作対応制動力がゼロに達した後(時刻t2後)であってアクセルペダル操作が開始された時点(時刻t3)の後の時点までに亘って(従って、少なくとも「制駆動トルクなし期間」に亘って)、M/G駆動トルク(斜線で示した領域を参照)のみならず、ブレーキ操作対応制動力よりも大きい制動力(微細なドットで示した領域を参照)が駆動輪に付与され続ける。これによっても、「発進前の一時的な後進」の発生が抑制され得る。
【0073】
ここで、値T2及び値F1も、「制駆動トルクなし期間」にて車両が後進しない範囲内で最も小さい値に設定されることが好ましい。この場合、値T2及びF1は、登坂路の勾配が小さいほどより小さい値に設定される。これにより、「発進前の一時的な後進」の発生抑制のために不必要に大きいM/G駆動トルク及び制動力が付与されることが抑制される。
【0074】
(降坂路でのEV発進)
次に、降坂路での「発進直後の車速の急激な増大」の発生の抑制について、図6を参照しながら説明する。本装置では、ブレーキペダルBPが踏み込まれて車両が停止している状態にて、路面が「降坂路」であるか否かが判定される。ここで、「降坂路」とは、本例では、その勾配(>0)が「制駆動トルクなし期間」において発進後の車速が急激に増大しない範囲の上限値以上の路面を指す。「降坂路」では、「制駆動トルクなし期間」にて発進後の車速が急激に増大し得る。
【0075】
「降坂路」と判定されている状態にて、車両停止状態にてブレーキ操作対応制動力のゼロに向けた減少傾向が検出されたとき、M/G回生トルクが付与開始される。図6では、M/G回生トルクが負の値で示されている。「ブレーキ操作対応制動力のゼロに向けた減少傾向」は、図4、図5に示した例の場合と同じように検出される。図6に示す例では、時刻t2の直前の時点からM/G回生トルクが付与開始されている。また、図6に示す例では、時刻t2の直前の時点(即ち、M/G回生トルクが付与開始される時点の近傍)にて、車両に作用する重力における車両後進方向の成分に起因して、車両が発進している。
【0076】
付与開始されたM/G回生トルクは、車速が所定値(微小値)V1に達する時点、或いは、M/G回生トルクの大きさが所定値に達する時点まで増大され、その後、一定に維持される。図6に示す例では、M/G回生トルクの大きさは、値(−T3)で一定に維持されている。この間、図6に示す例では制動力が付与されていないが、制動力(即ち、ブレーキ操作対応制動力よりも大きい制動力)が付与されてもよい。この制動力の大きさは、M/G回生トルクが付与されない場合において「発進直後の車速の急激な増大」の発生抑制のためにブレーキペダル操作により付与されるブレーキ操作対応制動力の大きさよりも小さい。
【0077】
そして、時刻t3以降、M/G回生トルクの大きさがゼロまで減少されていく。この結果、所定値(微小値)V1に維持されてきた車速が徐々に(緩やかに)増大していく。M/G回生トルクの大きさがゼロまで達した後、M/G回生トルクに代えてM/G駆動トルクがアクセル開度に応じて増大されていく。この結果、車両の加速が継続される。なお、M/G回生トルクの大きさの減少開始時点は、時刻t3以降の時点であってもよい。
【0078】
このように、ブレーキ操作対応制動力がゼロに達する時点(時刻t2)の前の時点から、ブレーキ操作対応制動力がゼロに達した後(時刻t2後)であってアクセルペダル操作が開始された時点(時刻t3)の後の時点までに亘って(従って、少なくとも「制駆動トルクなし期間」に亘って)、M/G回生トルク(斜線で示した領域を参照)が駆動輪に付与され続ける。この結果、「発進直後の車速の急激な増大」の発生が抑制され得る。従って、降坂路にて運転者に違和感を与えることなくEV発進(正確には、重力の作用による発進)が実行され得る。
【0079】
ここで、値(−T3)(>0)は、上述のように、車速が所定値V1に維持される状態に対応する値に設定され得る。この場合、値(−T3)は、降坂路の勾配(>0)が小さいほどより小さい値に設定される。これにより、降坂路の勾配にかかわらず、「発進直後の車速の急激な増大」の発生抑制のため、ひいては、車速を所定値V1で一定に維持するために要求される適切な大きさのM/G回生トルクが付与され得る。
【0080】
なお、M/G回生トルクが付与されている間において、車両が(重力の作用により)発進しないとき、或いは、車速が所定値V1に達しないとき、M/G回生トルクの大きさが減少されることが好ましい。また、上記所定値V1は、降坂路の勾配(>0)が大きいほどより大きい値に設定されてもよい。これにより、降坂路の勾配に応じたより違和感の少ない発進がなされ得る。
【0081】
また、M/G回生トルクが付与されている間、このM/G回生トルクに基づいてM/G40にて発電される電力を利用して、M/G40に電気エネルギを供給するバッテリ(図示せず)が充填されてもよい。これにより、車両全体としての総合的なエネルギ効率(燃費)を良くすることができる。
【0082】
本発明は上記実施形態に限定されることはなく、本発明の範囲内において種々の変形例を採用することができる。例えば、上記実施形態では、動力源としてE/G10とM/G40とを備えた車両が使用されているが、動力源としてM/G40のみを備えた車両が使用されてもよい。また、上記実施形態では、T/M20が備えられているが、T/M20が省略されていてもよい。
【0083】
また、上記実施形態では、切替機構50として、IN接続状態、OUT接続状態、及びニュートラル状態の何れにも切り替え可能なものが使用されているが、切替機構50として、IN接続状態、及びニュートラル状態のみに切り替え可能なものが使用されてもよい。この場合、IN接続状態にてEV発進がなされる。同様に、切替機構50として、OUT接続状態、及びニュートラル状態のみに切り替え可能なものが使用されてもよい。この場合、OUT接続状態にてEV発進がなされる。また、切替機構50そのものが省略されて、IN接続状態又はOUT接続状態が常時達成されていてもよい。
【0084】
また、上記実施形態では、変速機としてトルクコンバータを備えない多段変速機を使用した所謂オートメイティッド・マニュアル・トランスミッションが使用されているが、変速機として、トルクコンバータを備えるとともに車両の走行状態に応じて変速作動が自動的に実行される多段変速機又は無段変速機(所謂オートマチックトランスミッション(AT))が使用されてもよい。
【0085】
加えて、EV発進がなされる場合において、路面の勾配に応じて、IN接続状態とOUT接続状態の何れを選択するかが決定されてもよい。以下、この点について述べる。M/G40の出力軸A4のトルクに基づく駆動輪に伝達されるトルクの最大値を「M/G出力最大トルク」と定義する。
【0086】
EV発進時における「M/G出力最大トルク」は、IN接続状態では、「M/G回転速度=0でのM/Gトルクの最大値」に「IN接続減速比Gin」を乗じた値に一致し、OUT接続状態では、「M/G回転速度=0でのM/Gトルクの最大値」に「OUT接続減速比Gout」を乗じた値に一致する。従って、EV発進時における「IN接続減速比Gin」と「OUT接続減速比Gout」とが異なる場合、IN接続状態とOUT接続状態とでは、「M/G出力最大トルク」が異なる。加えて、登坂路(降坂路)の勾配が大きいほど、より大きいM/G駆動トルク(M/G回生トルク)が必要とされる。
【0087】
以上より、EV発進時にて、路面の勾配が所定値(>0)以上の場合にはIN又はOUT接続状態のうちで「M/G出力最大トルク」が大きい方の接続状態が選択され、路面の勾配が前記所定値未満の場合にはIN又はOUT接続状態のうちで「M/G出力最大トルク」が小さい方の接続状態が選択され得る。例えば、OUT接続減速比Goutが変速機減速比Gtmの「2速」に対応する値の近傍に設定され、IN接続状態でのEV発進時にて変速段として「1速」が原則的に選択されるものとする。この場合、EV発進時にて、Gin>Goutの関係が成立する。従って、路面の勾配が所定値(>0)以上の場合にはIN接続状態が選択され、路面の勾配が前記所定値未満の場合にはOUT接続状態が選択され得る。
【符号の説明】
【0088】
10…エンジン、20…変速機、30…クラッチ、40…モータジェネレータ、50…切替機構、60…制動力制御装置、71…車輪速度センサ、72…アクセル開度センサ、73…シフト位置センサ、74…ブレーキセンサ、70…ECU、AP…アクセルペダル、BP…アクセルペダル、SF…シフトレバー
【特許請求の範囲】
【請求項1】
動力源として少なくとも電動機を備えた車両に適用される車両の動力伝達制御装置であって、
前記車両の運転者により操作される加速操作部材の操作を検出する検出手段と、
前記電動機の出力軸のトルクに基づく車両加速方向の駆動トルクである電動機駆動トルクを前記加速操作部材の操作に応じて前記車両の駆動輪に付与する電動機トルク制御手段と、
前記車両の運転者により操作される制動操作部材の操作に応じた制動力である制動操作対応制動力を前記車両の車輪に付与する制動力制御手段と、
前記車両が停止している路面が登坂路か否かを判定する判定手段と、
を備え、
前記電動機トルク制御手段は、
前記路面が登坂路であると判定されている場合であって、且つ、前記制動操作対応制動力により前記車両が停止している状態にて前記制動操作対応制動力のゼロに向けた減少傾向が検出されたとき、前記制動操作対応制動力がゼロに達する時点の前の時点から、前記制動操作対応制動力がゼロに達した後であって前記加速操作部材の操作が開始された時点の後の時点までに亘って、前記電動機駆動トルクを前記駆動輪に付与するように構成された車両の動力伝達制御装置。
【請求項2】
請求項1に記載の車両の動力伝達制御装置において、
前記電動機トルク制御手段は、
前記登坂路の勾配又は前記登坂路の勾配に相関する値が大きいほど、前記駆動輪に付与される前記電動機駆動トルクをより大きい値に調整するように構成された車両の動力伝達制御装置。
【請求項3】
請求項1又は請求項2に記載の車両の動力伝達制御装置において、
前記制動力制御手段は、
前記制動操作対応制動力よりも大きい制動力を前記車輪に付与可能に構成されていて、
前記制動力制御手段は、
前記制動操作対応制動力がゼロに達する時点の前の時点から、前記制動操作対応制動力がゼロに達した後であって前記加速操作部材の操作が開始された時点の後の時点までに亘って、前記制動操作対応制動力よりも大きい制動力を前記車輪に付与するように構成された車両の動力伝達制御装置。
【請求項4】
動力源として少なくとも電動機を備えた車両に適用される車両の動力伝達制御装置であって、
前記車両の運転者により操作される加速操作部材の操作を検出する検出手段と、
前記電動機の出力軸のトルクに基づく車両加速方向の駆動トルクである電動機駆動トルクを前記加速操作部材の操作に応じて前記車両の駆動輪に付与するとともに、前記電動機の出力軸のトルクに基づく車両減速方向の回生トルクである電動機回生トルクを前記車両の駆動輪に付与する電動機トルク制御手段と、
前記車両の運転者により操作される制動操作部材の操作に応じた制動力である制動操作対応制動力を前記車両の車輪に付与する制動力制御手段と、
前記車両が停止している路面が降坂路か否かを判定する判定手段と、
を備え、
前記電動機トルク制御手段は、
前記路面が降坂路であると判定されている場合であって、且つ、前記制動操作対応制動力により前記車両が停止している状態にて前記制動操作対応制動力のゼロに向けた減少傾向が検出されたとき、前記制動操作対応制動力がゼロに達する時点の前の時点から、前記制動操作対応制動力がゼロに達した後であって前記加速操作部材の操作が開始された時点の後の時点までに亘って、前記電動機回生トルクを前記駆動輪に付与するように構成された車両の動力伝達制御装置。
【請求項5】
請求項4に記載の車両の動力伝達制御装置において、
前記電動機トルク制御手段は、
前記降坂路の勾配又は前記降坂路の勾配に相関する値が大きいほど、前記駆動輪に付与される前記電動機回生トルクをより大きい値に調整するように構成された車両の動力伝達制御装置。
【請求項6】
請求項4又は請求項5に記載の車両の動力伝達制御装置において、
前記電動機トルク制御手段は、
前記駆動輪に付与される前記電動機回生トルクに基づいて前記電動機にて発電される電力を利用して、前記電動機に電気エネルギを供給する電池を充填するように構成された車両の動力伝達制御装置。
【請求項7】
請求項1乃至請求項6の何れか一項に記載の車両の動力伝達制御装置であって、
動力源として前記電動機に加えて内燃機関を備えた車両に適用され、
前記内燃機関の出力軸との間で動力伝達系統が形成される入力軸と、前記車両の駆動輪との間で動力伝達系統が形成される出力軸とを備え、前記出力軸の回転速度に対する前記入力軸の回転速度の割合である変速機減速比を調整可能な変速機と、
前記電動機の出力軸の接続状態を、前記電動機の出力軸と前記変速機の入力軸との間で動力伝達系統が形成される入力側接続状態と、前記電動機の出力軸と前記変速機の出力軸との間で前記変速機を介することなく動力伝達系統が形成される出力側接続状態と、前記電動機の出力軸と前記変速機の入力軸との間も前記電動機の出力軸と前記変速機の出力軸との間も動力伝達系統が形成されない非接続状態と、のうちで少なくとも2以上の状態に切り替え可能な切替機構と、
を備え、
前記電動機トルク制御手段は、
前記切替機構により前記入力側接続状態又は前記出力側接続状態が選択された状態にて、前記電動機駆動トルク又は前記電動機回生トルクを前記駆動輪に付与するように構成された車両の動力伝達制御装置。
【請求項1】
動力源として少なくとも電動機を備えた車両に適用される車両の動力伝達制御装置であって、
前記車両の運転者により操作される加速操作部材の操作を検出する検出手段と、
前記電動機の出力軸のトルクに基づく車両加速方向の駆動トルクである電動機駆動トルクを前記加速操作部材の操作に応じて前記車両の駆動輪に付与する電動機トルク制御手段と、
前記車両の運転者により操作される制動操作部材の操作に応じた制動力である制動操作対応制動力を前記車両の車輪に付与する制動力制御手段と、
前記車両が停止している路面が登坂路か否かを判定する判定手段と、
を備え、
前記電動機トルク制御手段は、
前記路面が登坂路であると判定されている場合であって、且つ、前記制動操作対応制動力により前記車両が停止している状態にて前記制動操作対応制動力のゼロに向けた減少傾向が検出されたとき、前記制動操作対応制動力がゼロに達する時点の前の時点から、前記制動操作対応制動力がゼロに達した後であって前記加速操作部材の操作が開始された時点の後の時点までに亘って、前記電動機駆動トルクを前記駆動輪に付与するように構成された車両の動力伝達制御装置。
【請求項2】
請求項1に記載の車両の動力伝達制御装置において、
前記電動機トルク制御手段は、
前記登坂路の勾配又は前記登坂路の勾配に相関する値が大きいほど、前記駆動輪に付与される前記電動機駆動トルクをより大きい値に調整するように構成された車両の動力伝達制御装置。
【請求項3】
請求項1又は請求項2に記載の車両の動力伝達制御装置において、
前記制動力制御手段は、
前記制動操作対応制動力よりも大きい制動力を前記車輪に付与可能に構成されていて、
前記制動力制御手段は、
前記制動操作対応制動力がゼロに達する時点の前の時点から、前記制動操作対応制動力がゼロに達した後であって前記加速操作部材の操作が開始された時点の後の時点までに亘って、前記制動操作対応制動力よりも大きい制動力を前記車輪に付与するように構成された車両の動力伝達制御装置。
【請求項4】
動力源として少なくとも電動機を備えた車両に適用される車両の動力伝達制御装置であって、
前記車両の運転者により操作される加速操作部材の操作を検出する検出手段と、
前記電動機の出力軸のトルクに基づく車両加速方向の駆動トルクである電動機駆動トルクを前記加速操作部材の操作に応じて前記車両の駆動輪に付与するとともに、前記電動機の出力軸のトルクに基づく車両減速方向の回生トルクである電動機回生トルクを前記車両の駆動輪に付与する電動機トルク制御手段と、
前記車両の運転者により操作される制動操作部材の操作に応じた制動力である制動操作対応制動力を前記車両の車輪に付与する制動力制御手段と、
前記車両が停止している路面が降坂路か否かを判定する判定手段と、
を備え、
前記電動機トルク制御手段は、
前記路面が降坂路であると判定されている場合であって、且つ、前記制動操作対応制動力により前記車両が停止している状態にて前記制動操作対応制動力のゼロに向けた減少傾向が検出されたとき、前記制動操作対応制動力がゼロに達する時点の前の時点から、前記制動操作対応制動力がゼロに達した後であって前記加速操作部材の操作が開始された時点の後の時点までに亘って、前記電動機回生トルクを前記駆動輪に付与するように構成された車両の動力伝達制御装置。
【請求項5】
請求項4に記載の車両の動力伝達制御装置において、
前記電動機トルク制御手段は、
前記降坂路の勾配又は前記降坂路の勾配に相関する値が大きいほど、前記駆動輪に付与される前記電動機回生トルクをより大きい値に調整するように構成された車両の動力伝達制御装置。
【請求項6】
請求項4又は請求項5に記載の車両の動力伝達制御装置において、
前記電動機トルク制御手段は、
前記駆動輪に付与される前記電動機回生トルクに基づいて前記電動機にて発電される電力を利用して、前記電動機に電気エネルギを供給する電池を充填するように構成された車両の動力伝達制御装置。
【請求項7】
請求項1乃至請求項6の何れか一項に記載の車両の動力伝達制御装置であって、
動力源として前記電動機に加えて内燃機関を備えた車両に適用され、
前記内燃機関の出力軸との間で動力伝達系統が形成される入力軸と、前記車両の駆動輪との間で動力伝達系統が形成される出力軸とを備え、前記出力軸の回転速度に対する前記入力軸の回転速度の割合である変速機減速比を調整可能な変速機と、
前記電動機の出力軸の接続状態を、前記電動機の出力軸と前記変速機の入力軸との間で動力伝達系統が形成される入力側接続状態と、前記電動機の出力軸と前記変速機の出力軸との間で前記変速機を介することなく動力伝達系統が形成される出力側接続状態と、前記電動機の出力軸と前記変速機の入力軸との間も前記電動機の出力軸と前記変速機の出力軸との間も動力伝達系統が形成されない非接続状態と、のうちで少なくとも2以上の状態に切り替え可能な切替機構と、
を備え、
前記電動機トルク制御手段は、
前記切替機構により前記入力側接続状態又は前記出力側接続状態が選択された状態にて、前記電動機駆動トルク又は前記電動機回生トルクを前記駆動輪に付与するように構成された車両の動力伝達制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2010−246307(P2010−246307A)
【公開日】平成22年10月28日(2010.10.28)
【国際特許分類】
【出願番号】特願2009−93864(P2009−93864)
【出願日】平成21年4月8日(2009.4.8)
【出願人】(592058315)アイシン・エーアイ株式会社 (490)
【Fターム(参考)】
【公開日】平成22年10月28日(2010.10.28)
【国際特許分類】
【出願日】平成21年4月8日(2009.4.8)
【出願人】(592058315)アイシン・エーアイ株式会社 (490)
【Fターム(参考)】
[ Back to top ]