
車両の協調ブレーキ制御装置
【課題】コストアップや重量増加を招くことなく、運転者が要求する大きさの制動力を確保しつつブレーキ鳴きの発生を確実に防ぐことができる車両の協調ブレーキ制御装置を提供すること。
【解決手段】液圧制動力を発生する液圧ブレーキ5と回生制動力を発生する回生ブレーキ4を協調制御して運転者が要求する制動力を得る車両の協調ブレーキ制御装置18において、前記液圧ブレーキ5の最低液圧を設定し、前記液圧ブレーキ5を使用する場合には該液圧ブレーキ5を前記最低液圧以上の液圧で作動させる。具体的には、回生ブレーキ4の最高回生制動力を設定し、運転者が要求する制動力に対する最高回生制動力の不足分を液圧制動力で補い、該液圧制動力を発生させる液圧が最低液圧未満である場合には、液圧を最低液圧以上に高めて液圧制動力を増加させるとともに、その液圧制動力の増加分だけ回生制動力を減少させる。
【解決手段】液圧制動力を発生する液圧ブレーキ5と回生制動力を発生する回生ブレーキ4を協調制御して運転者が要求する制動力を得る車両の協調ブレーキ制御装置18において、前記液圧ブレーキ5の最低液圧を設定し、前記液圧ブレーキ5を使用する場合には該液圧ブレーキ5を前記最低液圧以上の液圧で作動させる。具体的には、回生ブレーキ4の最高回生制動力を設定し、運転者が要求する制動力に対する最高回生制動力の不足分を液圧制動力で補い、該液圧制動力を発生させる液圧が最低液圧未満である場合には、液圧を最低液圧以上に高めて液圧制動力を増加させるとともに、その液圧制動力の増加分だけ回生制動力を減少させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、液圧制動力を発生する液圧ブレーキと回生制動力を発生する回生ブレーキを協調制御して運転者が要求する制動力を得る車両の協調ブレーキ制御装置に関するものである。
【背景技術】
【0002】
電動モータを駆動源として走行する電気自動車等の車両は、液圧制動力を発生する液圧ブレーキと回生制動力を発生する回生ブレーキを備え、両ブレーキを協調制御して運転者が要求する制動力を得るようにしている。
【0003】
ここで、液圧ブレーキは、運転者がブレーキペダルを踏み込むことによってマスタシリンダに発生する液圧を各車輪の例えばディスクブレーキ装置のホイールシリンダに供給してブレーキパッドを動作させ、車輪と共に回転するブレーキディスクをブレーキパッドで挟持することによって両者間に発生する摩擦抵抗(液圧制動力)によって車輪の回転に制動を加えるものである。又、回生ブレーキは、減速時に電動モータを発電機として機能させることによって運動エネルギを電気エネルギに変換してバッテリに蓄えるとともに、電動モータの回転抵抗によって発生する回生トルクを回生制動力として利用するものである。
【0004】
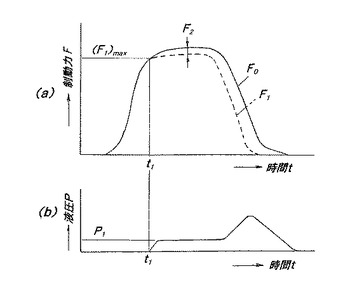
ところで、液圧ブレーキと回生ブレーキを備える車両にあっては、減速時の運動エネルギをより多く回収して燃費を向上させるために回生制動力を主として利用するよう制動力の配分が行われているが、回生ブレーキが発生し得る最高回生制動力はバッテリが受け入れることができる回生エネルギの最大値によって制限される。このため、運転者が要求する制動力に対して最高回生制動力に制限された回生制動力のみでは制動力が不足する場合には、その不足分を液圧制動力で補うようにしている。このことを図4に基づいて以下に説明する。
【0005】
即ち、図4(a)は制動力の時間変化を示す図、同図(b)は液圧ブレーキの液圧の時間変化を示す図であり、車両の減速時に運転者が要求する制動力F0(要求総制動力)が図4(a)で実線で示すものであり、この場合の回生制動力F1を破線にて示す。このとき、最高回生制動力は図示の(F1)maxである。図4(a)に示す制動力の協調制御では、運転者のブレーキ操作によって回生制動力が大きくなり、図示の時刻t1に最高回生制動力(F1)maxに達する。図示の時間t1以降は最高回生制動力(F01)maxでは運転者が要求する制動力F0を賄い切れず、不足分(F0−(F1)max)を液圧ブレーキの液圧制動力F2によって補うことが行われている。このときの液圧ブレーキの液圧Pの時間変化が図4(b)に示されるが、図示のP1のように液圧Pが微小である場合には、各ブレーキ装置のブレーキパッドの保持力(ブレーキディスク等への押し付け力)が小さく、該ブレーキパッドが振動し易いために「ブレーキ鳴き」と称される不快な音が発生する.
【0006】
そこで、特許文献1には、液圧ブレーキのブレーキ鳴きを検知するブレーキ鳴き検知手段を設け、該ブレーキ鳴き検知手段によってブレーキ鳴きが検知されると、液圧制動力を増加又は減少させ、その増加又は減少分だけ回生制動力を減少又は増加させることによって、所要の大きさの総制動力を確保しつつブレーキ鳴きの発生を防ぐようにした制動力制御装置が提案されている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開平10−329681号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、特許文献1において提案された制動力制御装置では、ブレーキ鳴きを検知するブレーキ鳴き検知手段が必要であるためにコストアップや重量増加を招くとともに、ブレーキ鳴きを検知してから液圧制動力を変化させるために僅かの時間ではあるがブレーキ鳴きが発生してしまうという問題がある。
【0009】
本発明は上記問題に鑑みてなされたもので、その目的とする処は、コストアップや重量増加を招くことなく、運転者が要求する大きさの制動力を確保しつつブレーキ鳴きの発生を確実に防ぐことができる車両の協調ブレーキ制御装置を提供することにある。
【課題を解決するための手段】
【0010】
上記目的を達成するため、請求項1記載の発明は、液圧制動力を発生する液圧ブレーキと回生制動力を発生する回生ブレーキを協調制御して運転者が要求する制動力を得る車両の協調ブレーキ制御装置において、前記液圧ブレーキの最低液圧を設定し、前記液圧ブレーキを使用する場合には該液圧ブレーキを前記最低液圧以上の液圧で作動させることを特徴とする。
【0011】
請求項2記載の発明は、請求項1記載の発明において、前記回生ブレーキの最高回生制動力を設定し、運転者が要求する制動力に対する前記最高回生制動力の不足分を前記液圧制動力で補い、該液圧制動力を発生させる液圧が前記最低液圧未満である場合には、液圧を最低液圧以上に高めて液圧制動力を増加させるとともに、その液圧制動力の増加分だけ前記回生制動力を減少させることを特徴とする。
【0012】
請求項3記載の発明は、請求項1又は2記載の発明において、ブレーキペダルのストロークを検出するストロークセンサ又はブレーキペダルに加えられる踏力を検出する踏力センサを設け、前記ストロークセンサによって検出されるストロークの加速度又は前記踏力センサによって検出される踏力変化の加速度に基づいて運転者が要求する制動力を予測することを特徴とする。
【0013】
請求項4記載の発明は、請求項1〜3の何れかに記載の発明において、前記液圧ブレーキと前記回生ブレーキを協調制御して運転者が要求する制動力が得られた後、運転者が要求する制動力が増加した場合には、先ず回生制動力を増加させ、その後に液圧制動力を増加させることを特徴とする。
【0014】
請求項5記載の発明は、請求項1〜4の何れかに記載の発明において、前記液圧ブレーキと前記回生ブレーキを協調制御して運転者が要求する制動力が得られた後、運転者が要求する制動力が減少した場合には、先ず液圧ブレーキの液圧を最低液圧まで下げて液圧制動力を減少させ、その後に回生制動力を減少させることを特徴とする。
【発明の効果】
【0015】
請求項1及び2記載の発明によれば、液圧ブレーキにブレーキ鳴きが発生しない液圧の最低値を設定し、運転者が要求する制動力に対する最高回生制動力の不足分を補う液圧制動力を発生させる液圧が最低液圧未満である場合には、液圧を最低液圧以上に高めて液圧制動力を増加させるようにしたため、各車輪に設けられた液圧ブレーキのブレーキパッドの保持力(押し付け力)を高めて振動の発生を防ぐことができ、ブレーキパッドの振動に伴うブレーキ鳴きの発生を確実に防ぐことができる。又、液圧制動力の増加分だけ回生制動力を減少させるようにしたため、運転者が要求する制動力を安定的に得ることができる。
【0016】
請求項3記載の発明によれば、既設のストロークセンサ又は踏力センサによって検出されるストロークの加速度又は踏力変化の加速度に基づいて運転者が要求する制動力を予測し、この予測した制動力から液圧ブレーキに必要な液圧を求めるようにしたため、ブレーキ鳴きを検知するブレーキ鳴き検知手段が不要となり、当該協調ブレーキ制御装置のコストダウンと軽量化を図ることができる。尚、求められた液圧が最低液圧未満である場合には、液圧を最低液圧以上に高めて液圧制動力を増加させるとともに、液圧制動力の増加分だけ回生制動力を減少させる制御がなされる。
【0017】
請求項4記載の発明によれば、液圧ブレーキと回生ブレーキを協調制御して運転者が要求する制動力が得られた後、運転者が要求する制動力が増加した場合には、先ず回生制動力を増加させるようにしたため、運動エネルギを電気エネルギとして効果的に回収して燃費の向上を図ることができる。
【0018】
請求項5記載の発明によれば、液圧ブレーキと回生ブレーキを協調制御して運転者が要求する制動力が得られた後、運転者が要求する制動力が減少した場合には、先ず液圧ブレーキの液圧を最低液圧まで下げて液圧制動力を減少させ、その後に回生制動力を減少させるようにしたため、回生制動力を可能な限り長時間使用して運動エネルギを電気エネルギとして回収することができる。又、液圧ブレーキの液圧を最低液圧に保持するようにしたため、例えば停車させるときの協調制御等、車速の低下によって回生制動が終了して液圧制動力のみの制動となるときの制動力の不連続感(G抜け感等)等、運転者の違和感を解消することができる。
【図面の簡単な説明】
【0019】
【図1】本発明に係る車両の協調ブレーキ制御装置のシステム構成図である。
【図2】(a)は本発明に係る車両の協調ブレーキ制御装置における制動トルクの時間変化を示す図、(b)は液圧ブレーキの液圧の時間変化を示す図である。
【図3】本発明に係る協調ブレーキ制御装置の制御手順を示すフローチャートである。
【図4】(a)は従来の協調ブレーキ制御装置における制動トルクの時間変化を示す図、(b)は液圧ブレーキの液圧の時間変化を示す図である。
【発明を実施するための形態】
【0020】
以下に本発明の実施の形態を添付図面に基づいて説明する。
【0021】
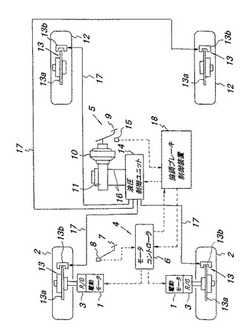
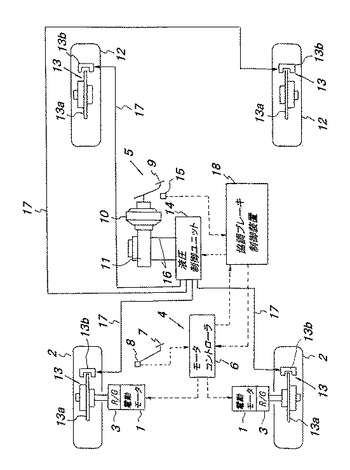
図1は本発明に係る協調ブレーキ制御装置のシステム構成図であり、この協調ブレーキ制御装置を備える車両は、電動モータ1を駆動源として走行する電気自動車であって、駆動輪である左右一対の前輪2は電動モータ1から減速機(R/G)3を経て伝達される動力によって回転駆動される。そして、この電気自動車には、減速時に各電動モータ1を発電機として機能させて回生制動力を発生させる回生ブレーキ4と、液圧によって機械的な摩擦力による液圧制動力を発生させる液圧ブレーキ5が備えられている。
【0022】
上記回生ブレーキ4は、電動モータ1とこれらを制御するモータコントローラ6を備えており、運転者がアクセルペダル7の踏み込みを解除すると、その情報がアクセルポジションセンサ8からモータコントローラ6に伝達され、モータコントローラ6は、各電動モータ1を発電機として機能させる。すると、発電機として機能する各電動モータ1の発電負荷が減速機3を介して各前輪2に加わり、各前輪2にはエンジンブレーキ相当の回生制動力が加えられる。
【0023】
前記液圧ブレーキ5は、ブレーキペダル9とその踏込力(踏力)をアシストするブレーキブースタ10、ブレーキペダル9の踏み込みによって所要の液圧を発生するマスタシリンダ11、左右一対の前輪2と後輪12にそれぞれ備えられたブレーキ装置13、所要の液圧を発生する液圧制御ユニット14等によって構成されており、ブレーキペダル9の近傍には、該ブレーキペダル9のストロークを検出するストロークセンサ15が設けられている。尚、ストロークセンサ15に代えてブレーキペダル9の踏込力(踏力)を検出する踏力センサを設けても良い。
【0024】
ここで、前輪2と後輪12にそれぞれ設けられたブレーキ装置13は、ディスクブレーキであって、前輪2又は後輪12と共に回転するブレーキディスク13aと、不図示のホイールシリンダに供給される液圧によって作動するブレーキパッド13bを備えており、ホイールシリンダに液圧が供給されると、ブレーキパッド13bが動作してブレーキディスク13aを挟持し、両者の摩擦抵抗によって機械的な液圧制動力が発生する。
【0025】
又、前記液圧制御ユニット14と前記マスタシリンダ11と液圧制御ユニット14とはブレーキ配管16によって接続されており、前輪2と後輪12にそれぞれ設けられたブレーキ装置13のホイールシリンダはブレーキ配管17によって液圧制御ユヨニット14にそれぞれ接続されている。
【0026】
ところで、本発明に係る協調ブレーキ制御装置18は、回生制動力を発生する回生ブレーキ4と液圧制動力を発生する液圧ブレーキ5を協調制御して運転者が要求する制動力を得るものであって、ブレーキペダル9のストロークを検出するストロークセンサ15の出力や、ブレーキペダル9の踏込力(踏力)を検出する踏力センサからの出力、或いは、ブレーキペダル9の踏み込みによって発生するマスタシリンダ11の液圧に応じて、運転者が要求する制動力を検知し、回生ブレーキ4と液圧ブレーキ5を協調制御する。更に、前記ストロークセンサ15によって検出されるブレーキペダル9のストロークの加速度に基づいて運転者が要求する制動力を予測する機能を備えている。つまり、運転者によるブレーキペダル9の踏込操作(ストローク)は、運転者が所望する制動力に近づくと操作速度が遅くなるため、この操作速度の変化を検知し、運転者が要求する制動力を予測する。そして、この協調ブレーキ制御装置18から前記モータコントローラ6には運転者が要求する制動力の情報が送信され、モータコントローラ6から協調ブレーキ制御装置18には最高回生制動力の情報が送信される。又、協調ブレーキ制御装置18から液圧制御ユニット14には必要なブレーキ液圧の情報が送信される。尚、ストロークセンサ15に代えて踏力センサを用いる場合には、該踏力センサによって検出される踏力変化の加速度に基づいて運転者が要求する制動力を予測する。
【0027】
而して、本発明に係る協調ブレーキ制御装置18は、車両の減速時の運動エネルギを電気エネルギとして回収して燃費向上を図るため、回生制動力を主として利用するよう制動力を配分するようにしているが、回生ブレーキ4が発生し得る最高回生制動力はバッテリが受け入れることができる回生エネルギの最大値によって制限される。このため、運転者が要求する制動力対して最高回生制動力に制限された回生制動力のみでは制動力が不足する場合には、その不足分を液圧ブレーキ5によって発生する液圧制動力で補うようにしている。この場合、補う液圧制動力が微小である場合には、各ブレーキ装置13のブレーキパッド13bの保持力が小さく、該ブレーキパッド13bが振動し易いためにブレーキ鳴きが発生することは前述の通りである。
【0028】
そこで、本発明においては、液圧ブレーキ5にブレーキ鳴きが発生しない液圧の最低値である最低液圧と回生ブレーキ4の最高回生制動力を設定している。そして、運転者が要求する制動力に対して回生ブレーキ4を作動させ、回生エネルギの最高回生制動力では達成できない不足分を液圧制動力で補う。このとき、該液圧制動力を発生させる液圧が最低液圧未満である場合には、液圧を最低液圧以上に高めて液圧制動力を増加させるとともに、その液圧制動力の増加分だけ回生制動力を減少させるようにしている。このことを図2に基づいて以下に説明する。
【0029】
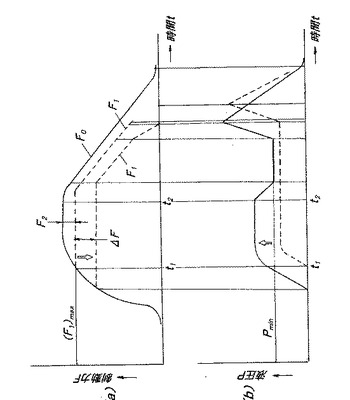
即ち、図2(a)は本発明における制動力Fの時間変化を示す図、同図(b)は液圧ブレーキ5の液圧Pの時間変化を示す図であり、車両の減速時に運転者が要求する制動力F0が図2(a)で実線で示すものである。この場合の最高回生制動力は図2(a)に示す(F1)maxであり、ブレーキ鳴きが発生しない最低液圧は図2(b)に示されたPminである。これによれば、図2(a)に示す制動力の協調制御では、運転者のブレーキ操作によって回生制動力が大きくなり、図示の時刻t1に最高回生制動力(F1)maxに達する。図示の時間t1以降は最高回生制動力(F1)maxだけでは運転者が要求する制動力F0を賄い切れず、不足分(F0−(F1)max)を液圧ブレーキ5の液圧制動力F2によって補うこととなる。このときの液圧ブレーキ5の液圧Pの時間変化が図2(b)の破線に示されるが、単純に不足分(F1−(F1)max)を液圧ブレーキ5の液圧制動力F2によって補うには、破線にて示すように液圧Pが微小となり、ブレーキ鳴きが発生しない最低液圧Pminよりも小さい液圧となる。尚、図2(a)のF1は、この制御を継続したときの回生制動力の時間変化を示し、不足分(F0とF1の差)が液圧ブレーキ5の液圧制動力F2となる。
【0030】
本実施の形態では、最高回生制動力(F1)maxに達する時刻t1までの運転者によるブレーキペダル9の踏込み操作(ストローク)操作速度の変化から運転者が要求する制動力を予測し、このように液圧Pが微小で最低液圧Pminよりも小さくなる場合には、実線にて示すように液圧Pを最低液圧Pmin以上に高めて液圧制動力F2を増加させるとともに、その液圧制動力F2の増加分だけ回生制動力F1を図2(a)に示すF1からF1’へと矢印で示すようにΔF(=F1−F1’)だけ減少させるようにしている。換言すると、運転者が要求する制動力が、最高回生制動力(F1)maxと最低液圧Pminに満たない液圧Pで達成することになる場合には、液圧ブレーキ5の液圧Pが最低液圧Pminよりも大きくなるように回生制動力F1を減少させて、液圧ブレーキ5を最低液圧Pminよりも大きな液圧Pで作動させる。つまり、最高回生制動力(F1)maxを少し超える程度の制動力(運転者が要求する制動力)が予測されたときは、時刻t1に達する前に回生制動力の増加が終了し、液圧ブレーキ5の液圧Pの上昇が開始される。
【0031】
又、本発明においては、回生ブレーキ4と液圧ブレーキ5を協調制御して運転者が要求する制動力F0が得られた後、運転者が要求する制動力F0が増加した場合(運転者がブレーキペダル9を更に踏み込んだ場合)には、先ず回生制動力F0を最高回生制動力(F1)maxにまで増加させ、その後に液圧制動力F2を増加させる制御がなされる。これとは逆に、回生ブレーキ4と液圧ブレーキ5を協調制御して運転者が要求する制動力F0が得られた後、運転者が要求する制動力F0が減少した場合(運転者がブレーキペダル9を戻す操作をした場合)には、先ず液圧ブレーキ5の液圧Pを最低液圧Pminまで下げて液圧制動力F2を減少させ、その後に回生制動力F1を減少させる制御がなされる。
【0032】
図2には、この状態が示されており、具体的には、車両が停止する時で運転者がブレーキを緩める状態を示している。時間t2において、運転者が要求する制動力F0が減少し始める(運転者がブレーキを緩め始める)。先ず液圧ブレーキ5の液圧Pを最低液圧Pminまで下げて液圧制動力F2を減少させ、その後に回生制動力F1’を減少させる制御がなされる。その後、車速が低下して所定の回生制動が終了する速度に達すると、液圧ブレーキ5の液圧Pの上昇が開始され、回生制動の制動力を液圧ブレーキ5の制動力に置き換える。
【0033】
次に、本発明に係る協調ブレーキ制御装置20における制御手順を図3に示すフローチャートに従って以下に説明する。
【0034】
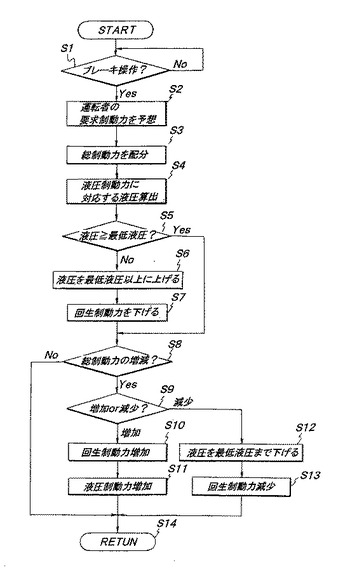
先ず、ブレーキ操作がなされたか否かが判定され(ステップS1)、ブレーキ操作がなされると(ステップS1の判定結果がYesであると)、ストロークセンサ15によって検出されるブレーキペダル9のストローク、ストロークの変化速度、及びストローク変化の加速度に基づいて運転者が要求する制動力(以下、「総制動力」と称する)F0を予想する(ステップS2)。詳細には、ストロークの変化速度や加速度にて、運転者のペダル操作の最終的なストローク終了位置を予測し、運転者が要求する総制動力F0を予想する。そして、総制動力F0を回生制動力F1と液圧制動力F2に配分する(ステップS3)。具体的には、次式によって総制動力F0が回生制動力F1と液圧制動力F2に配分される。
【0035】
総制動力F0が最高回生制動力(F1)max以下の場合:
回生制動力F1=総制動力F0
総制動力F0が最高回生制動力(F1)maxよりも大きいの場合:
回生制動力F1=最高回生制動力(F1)max
液圧制動力F2=(総制動力F0)−(回生制動力F1)
次に、上式によって配分された液圧制動力F2に相当する液圧ブレーキ5の液圧Pを算出し(ステップS4)、その液圧Pが最低液圧Pmin以上であるか否か(P≧Pmin)が判定される(ステップS5)。そして、液圧Pが最低液圧Pmin未満(P<Pmin)である場合(ステップS5での判定結果がNoである場合)には、液圧ブレーキ5においてブレーキ鳴きが発生する可能性があるために液圧Pを最低液圧Pmin以上に上げて液圧制動力F2を増加させ(ステップS6)、その液圧制動力F2の増加分だけ回生制動力を減少させる(ステップS7)。
【0036】
液圧Pが最低液圧Pmin以上(P≧Pmin)であるとき(ステップS5での判定結果がYesであるとき)及びステップS7の処理が終了すると、総制動力F0の増減があったか否かが判定される(ステップS8)。
【0037】
総制動力F0の増減があった場合(ステップS8での判定結果がYesで或る場合)には、増加であるか減少であるかが判定され(ステップS9)、増加である場合には、先ず回生制動力F1を増加させ(ステップS10)、回生制動力F1が最高回生制動力(F1)maxに達した後に液圧制動力F2を増加させ(ステップS11)、以後、以上の処理が繰り返される(ステップS14)。又、減少である場合には、先ず液圧ブレーキ5の液圧Pを最低液圧Pminまで下げて液圧制動力F2を減少させ(ステップS12)、その後に回生制動力F1を減少させ(ステップS13)、以後、以上の処理が繰り返される(ステップS14)。尚、総制動力F0の増減がない場合(ステップS9での判定結果がNoである場合)には、ステップS9〜S13の処理がスキップされてステップS1〜S8の処理が繰り返される(ステップS14)。
【0038】
以上のように、本発明によれば、液圧ブレーキ5にブレーキ鳴きが発生しない液圧Pの最低値(最低液圧Pmin)を設定し、運転者が要求する制動力(総制動力)F0に対する最高回生制動力(F1)maxの不足分を補う液圧制動力F2を発生させる液圧Pが最低液圧Pmin未満である場合には、液圧Pを最低液圧Pmin以上に高めて液圧制動力F2を増加させるようにしたため、各一対の前輪2と後輪12に設けられたブレーキ装置13のブレーキパッド13bの保持力を高めて振動の発生を防ぐことができ、ブレーキパッド13bの振動に伴うブレーキ鳴きの発生を確実に防ぐことができる。又、液圧制動力F2の増加分だけ回生制動力F1を減少させるようにしたため、運転者が要求する制動力(総制動力)F0を安定的に得ることができる。
【0039】
又、本発明では、既設のストロークセンサ15(又は踏力センサ)によって検出されるストロークの加速度(又は踏力の加速度)に基づいて運転者が要求する制動力(総制動力)F0を予測し、この予測した制動力F0から液圧ブレーキ5に必要な液圧Pを求めるようにしたため、ブレーキ鳴きを検知するブレーキ鳴き検知手段が不要となり、協調ブレーキ制御装置18のコストダウンと軽量化を図ることができる。尚、求められた液圧Pが最低液圧Pmin未満である場合には、液圧Pを最低液圧Pmin以上に高めて液圧制動力F2を増加させるとともに、液圧制動力F2の増加分だけ回生制動力F1を減少させる制御がなされる。
【0040】
更に。本発明によれば、回生ブレーキ4と液圧ブレーキ5を協調制御して運転者が要求する制動力F0が得られた後、その制動力F0が増加した場合には、先ず回生制動力F1を増加させるようにしたため、運動エネルギを電気エネルギとして効果的に回収して燃費の向上を図ることができる。これに対して、回生ブレーキ4と液圧ブレーキ5を協調制御して運転者が要求する制動力F0が得られた後、その制動力F0が減少した場合には、先ず液圧ブレーキ5の液圧Pを最低液圧Pminまで下げて液圧制動力F2を減少させ、その後に回生制動力F1を減少させるようにしたため、回生制動力F1を可能な限り長時間使用してより多くの運動エネルギを電気エネルギとして回収することができる。又、液圧ブレーキ5の液圧Pを最低液圧Pminに保持するようにしたため、車速の低下によって回生制動が終了するときの運転者の違和感を解消することができる。
【符号の説明】
【0041】
1 電動モータ
2 前輪
4 回生ブレーキ
5 液圧ブレーキ
6 モータコントローラ
7 アクセルペダル
8 アクセルポジションセンサ
9 ブレーキペダル
12 後輪
13 ブレーキ装置
13a ブレーキディスク
13b ブレーキパッド
14 液圧制御ユニット
15 ストロークセンサ
18 協調ブレーキ制御装置
【技術分野】
【0001】
本発明は、液圧制動力を発生する液圧ブレーキと回生制動力を発生する回生ブレーキを協調制御して運転者が要求する制動力を得る車両の協調ブレーキ制御装置に関するものである。
【背景技術】
【0002】
電動モータを駆動源として走行する電気自動車等の車両は、液圧制動力を発生する液圧ブレーキと回生制動力を発生する回生ブレーキを備え、両ブレーキを協調制御して運転者が要求する制動力を得るようにしている。
【0003】
ここで、液圧ブレーキは、運転者がブレーキペダルを踏み込むことによってマスタシリンダに発生する液圧を各車輪の例えばディスクブレーキ装置のホイールシリンダに供給してブレーキパッドを動作させ、車輪と共に回転するブレーキディスクをブレーキパッドで挟持することによって両者間に発生する摩擦抵抗(液圧制動力)によって車輪の回転に制動を加えるものである。又、回生ブレーキは、減速時に電動モータを発電機として機能させることによって運動エネルギを電気エネルギに変換してバッテリに蓄えるとともに、電動モータの回転抵抗によって発生する回生トルクを回生制動力として利用するものである。
【0004】
ところで、液圧ブレーキと回生ブレーキを備える車両にあっては、減速時の運動エネルギをより多く回収して燃費を向上させるために回生制動力を主として利用するよう制動力の配分が行われているが、回生ブレーキが発生し得る最高回生制動力はバッテリが受け入れることができる回生エネルギの最大値によって制限される。このため、運転者が要求する制動力に対して最高回生制動力に制限された回生制動力のみでは制動力が不足する場合には、その不足分を液圧制動力で補うようにしている。このことを図4に基づいて以下に説明する。
【0005】
即ち、図4(a)は制動力の時間変化を示す図、同図(b)は液圧ブレーキの液圧の時間変化を示す図であり、車両の減速時に運転者が要求する制動力F0(要求総制動力)が図4(a)で実線で示すものであり、この場合の回生制動力F1を破線にて示す。このとき、最高回生制動力は図示の(F1)maxである。図4(a)に示す制動力の協調制御では、運転者のブレーキ操作によって回生制動力が大きくなり、図示の時刻t1に最高回生制動力(F1)maxに達する。図示の時間t1以降は最高回生制動力(F01)maxでは運転者が要求する制動力F0を賄い切れず、不足分(F0−(F1)max)を液圧ブレーキの液圧制動力F2によって補うことが行われている。このときの液圧ブレーキの液圧Pの時間変化が図4(b)に示されるが、図示のP1のように液圧Pが微小である場合には、各ブレーキ装置のブレーキパッドの保持力(ブレーキディスク等への押し付け力)が小さく、該ブレーキパッドが振動し易いために「ブレーキ鳴き」と称される不快な音が発生する.
【0006】
そこで、特許文献1には、液圧ブレーキのブレーキ鳴きを検知するブレーキ鳴き検知手段を設け、該ブレーキ鳴き検知手段によってブレーキ鳴きが検知されると、液圧制動力を増加又は減少させ、その増加又は減少分だけ回生制動力を減少又は増加させることによって、所要の大きさの総制動力を確保しつつブレーキ鳴きの発生を防ぐようにした制動力制御装置が提案されている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開平10−329681号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、特許文献1において提案された制動力制御装置では、ブレーキ鳴きを検知するブレーキ鳴き検知手段が必要であるためにコストアップや重量増加を招くとともに、ブレーキ鳴きを検知してから液圧制動力を変化させるために僅かの時間ではあるがブレーキ鳴きが発生してしまうという問題がある。
【0009】
本発明は上記問題に鑑みてなされたもので、その目的とする処は、コストアップや重量増加を招くことなく、運転者が要求する大きさの制動力を確保しつつブレーキ鳴きの発生を確実に防ぐことができる車両の協調ブレーキ制御装置を提供することにある。
【課題を解決するための手段】
【0010】
上記目的を達成するため、請求項1記載の発明は、液圧制動力を発生する液圧ブレーキと回生制動力を発生する回生ブレーキを協調制御して運転者が要求する制動力を得る車両の協調ブレーキ制御装置において、前記液圧ブレーキの最低液圧を設定し、前記液圧ブレーキを使用する場合には該液圧ブレーキを前記最低液圧以上の液圧で作動させることを特徴とする。
【0011】
請求項2記載の発明は、請求項1記載の発明において、前記回生ブレーキの最高回生制動力を設定し、運転者が要求する制動力に対する前記最高回生制動力の不足分を前記液圧制動力で補い、該液圧制動力を発生させる液圧が前記最低液圧未満である場合には、液圧を最低液圧以上に高めて液圧制動力を増加させるとともに、その液圧制動力の増加分だけ前記回生制動力を減少させることを特徴とする。
【0012】
請求項3記載の発明は、請求項1又は2記載の発明において、ブレーキペダルのストロークを検出するストロークセンサ又はブレーキペダルに加えられる踏力を検出する踏力センサを設け、前記ストロークセンサによって検出されるストロークの加速度又は前記踏力センサによって検出される踏力変化の加速度に基づいて運転者が要求する制動力を予測することを特徴とする。
【0013】
請求項4記載の発明は、請求項1〜3の何れかに記載の発明において、前記液圧ブレーキと前記回生ブレーキを協調制御して運転者が要求する制動力が得られた後、運転者が要求する制動力が増加した場合には、先ず回生制動力を増加させ、その後に液圧制動力を増加させることを特徴とする。
【0014】
請求項5記載の発明は、請求項1〜4の何れかに記載の発明において、前記液圧ブレーキと前記回生ブレーキを協調制御して運転者が要求する制動力が得られた後、運転者が要求する制動力が減少した場合には、先ず液圧ブレーキの液圧を最低液圧まで下げて液圧制動力を減少させ、その後に回生制動力を減少させることを特徴とする。
【発明の効果】
【0015】
請求項1及び2記載の発明によれば、液圧ブレーキにブレーキ鳴きが発生しない液圧の最低値を設定し、運転者が要求する制動力に対する最高回生制動力の不足分を補う液圧制動力を発生させる液圧が最低液圧未満である場合には、液圧を最低液圧以上に高めて液圧制動力を増加させるようにしたため、各車輪に設けられた液圧ブレーキのブレーキパッドの保持力(押し付け力)を高めて振動の発生を防ぐことができ、ブレーキパッドの振動に伴うブレーキ鳴きの発生を確実に防ぐことができる。又、液圧制動力の増加分だけ回生制動力を減少させるようにしたため、運転者が要求する制動力を安定的に得ることができる。
【0016】
請求項3記載の発明によれば、既設のストロークセンサ又は踏力センサによって検出されるストロークの加速度又は踏力変化の加速度に基づいて運転者が要求する制動力を予測し、この予測した制動力から液圧ブレーキに必要な液圧を求めるようにしたため、ブレーキ鳴きを検知するブレーキ鳴き検知手段が不要となり、当該協調ブレーキ制御装置のコストダウンと軽量化を図ることができる。尚、求められた液圧が最低液圧未満である場合には、液圧を最低液圧以上に高めて液圧制動力を増加させるとともに、液圧制動力の増加分だけ回生制動力を減少させる制御がなされる。
【0017】
請求項4記載の発明によれば、液圧ブレーキと回生ブレーキを協調制御して運転者が要求する制動力が得られた後、運転者が要求する制動力が増加した場合には、先ず回生制動力を増加させるようにしたため、運動エネルギを電気エネルギとして効果的に回収して燃費の向上を図ることができる。
【0018】
請求項5記載の発明によれば、液圧ブレーキと回生ブレーキを協調制御して運転者が要求する制動力が得られた後、運転者が要求する制動力が減少した場合には、先ず液圧ブレーキの液圧を最低液圧まで下げて液圧制動力を減少させ、その後に回生制動力を減少させるようにしたため、回生制動力を可能な限り長時間使用して運動エネルギを電気エネルギとして回収することができる。又、液圧ブレーキの液圧を最低液圧に保持するようにしたため、例えば停車させるときの協調制御等、車速の低下によって回生制動が終了して液圧制動力のみの制動となるときの制動力の不連続感(G抜け感等)等、運転者の違和感を解消することができる。
【図面の簡単な説明】
【0019】
【図1】本発明に係る車両の協調ブレーキ制御装置のシステム構成図である。
【図2】(a)は本発明に係る車両の協調ブレーキ制御装置における制動トルクの時間変化を示す図、(b)は液圧ブレーキの液圧の時間変化を示す図である。
【図3】本発明に係る協調ブレーキ制御装置の制御手順を示すフローチャートである。
【図4】(a)は従来の協調ブレーキ制御装置における制動トルクの時間変化を示す図、(b)は液圧ブレーキの液圧の時間変化を示す図である。
【発明を実施するための形態】
【0020】
以下に本発明の実施の形態を添付図面に基づいて説明する。
【0021】
図1は本発明に係る協調ブレーキ制御装置のシステム構成図であり、この協調ブレーキ制御装置を備える車両は、電動モータ1を駆動源として走行する電気自動車であって、駆動輪である左右一対の前輪2は電動モータ1から減速機(R/G)3を経て伝達される動力によって回転駆動される。そして、この電気自動車には、減速時に各電動モータ1を発電機として機能させて回生制動力を発生させる回生ブレーキ4と、液圧によって機械的な摩擦力による液圧制動力を発生させる液圧ブレーキ5が備えられている。
【0022】
上記回生ブレーキ4は、電動モータ1とこれらを制御するモータコントローラ6を備えており、運転者がアクセルペダル7の踏み込みを解除すると、その情報がアクセルポジションセンサ8からモータコントローラ6に伝達され、モータコントローラ6は、各電動モータ1を発電機として機能させる。すると、発電機として機能する各電動モータ1の発電負荷が減速機3を介して各前輪2に加わり、各前輪2にはエンジンブレーキ相当の回生制動力が加えられる。
【0023】
前記液圧ブレーキ5は、ブレーキペダル9とその踏込力(踏力)をアシストするブレーキブースタ10、ブレーキペダル9の踏み込みによって所要の液圧を発生するマスタシリンダ11、左右一対の前輪2と後輪12にそれぞれ備えられたブレーキ装置13、所要の液圧を発生する液圧制御ユニット14等によって構成されており、ブレーキペダル9の近傍には、該ブレーキペダル9のストロークを検出するストロークセンサ15が設けられている。尚、ストロークセンサ15に代えてブレーキペダル9の踏込力(踏力)を検出する踏力センサを設けても良い。
【0024】
ここで、前輪2と後輪12にそれぞれ設けられたブレーキ装置13は、ディスクブレーキであって、前輪2又は後輪12と共に回転するブレーキディスク13aと、不図示のホイールシリンダに供給される液圧によって作動するブレーキパッド13bを備えており、ホイールシリンダに液圧が供給されると、ブレーキパッド13bが動作してブレーキディスク13aを挟持し、両者の摩擦抵抗によって機械的な液圧制動力が発生する。
【0025】
又、前記液圧制御ユニット14と前記マスタシリンダ11と液圧制御ユニット14とはブレーキ配管16によって接続されており、前輪2と後輪12にそれぞれ設けられたブレーキ装置13のホイールシリンダはブレーキ配管17によって液圧制御ユヨニット14にそれぞれ接続されている。
【0026】
ところで、本発明に係る協調ブレーキ制御装置18は、回生制動力を発生する回生ブレーキ4と液圧制動力を発生する液圧ブレーキ5を協調制御して運転者が要求する制動力を得るものであって、ブレーキペダル9のストロークを検出するストロークセンサ15の出力や、ブレーキペダル9の踏込力(踏力)を検出する踏力センサからの出力、或いは、ブレーキペダル9の踏み込みによって発生するマスタシリンダ11の液圧に応じて、運転者が要求する制動力を検知し、回生ブレーキ4と液圧ブレーキ5を協調制御する。更に、前記ストロークセンサ15によって検出されるブレーキペダル9のストロークの加速度に基づいて運転者が要求する制動力を予測する機能を備えている。つまり、運転者によるブレーキペダル9の踏込操作(ストローク)は、運転者が所望する制動力に近づくと操作速度が遅くなるため、この操作速度の変化を検知し、運転者が要求する制動力を予測する。そして、この協調ブレーキ制御装置18から前記モータコントローラ6には運転者が要求する制動力の情報が送信され、モータコントローラ6から協調ブレーキ制御装置18には最高回生制動力の情報が送信される。又、協調ブレーキ制御装置18から液圧制御ユニット14には必要なブレーキ液圧の情報が送信される。尚、ストロークセンサ15に代えて踏力センサを用いる場合には、該踏力センサによって検出される踏力変化の加速度に基づいて運転者が要求する制動力を予測する。
【0027】
而して、本発明に係る協調ブレーキ制御装置18は、車両の減速時の運動エネルギを電気エネルギとして回収して燃費向上を図るため、回生制動力を主として利用するよう制動力を配分するようにしているが、回生ブレーキ4が発生し得る最高回生制動力はバッテリが受け入れることができる回生エネルギの最大値によって制限される。このため、運転者が要求する制動力対して最高回生制動力に制限された回生制動力のみでは制動力が不足する場合には、その不足分を液圧ブレーキ5によって発生する液圧制動力で補うようにしている。この場合、補う液圧制動力が微小である場合には、各ブレーキ装置13のブレーキパッド13bの保持力が小さく、該ブレーキパッド13bが振動し易いためにブレーキ鳴きが発生することは前述の通りである。
【0028】
そこで、本発明においては、液圧ブレーキ5にブレーキ鳴きが発生しない液圧の最低値である最低液圧と回生ブレーキ4の最高回生制動力を設定している。そして、運転者が要求する制動力に対して回生ブレーキ4を作動させ、回生エネルギの最高回生制動力では達成できない不足分を液圧制動力で補う。このとき、該液圧制動力を発生させる液圧が最低液圧未満である場合には、液圧を最低液圧以上に高めて液圧制動力を増加させるとともに、その液圧制動力の増加分だけ回生制動力を減少させるようにしている。このことを図2に基づいて以下に説明する。
【0029】
即ち、図2(a)は本発明における制動力Fの時間変化を示す図、同図(b)は液圧ブレーキ5の液圧Pの時間変化を示す図であり、車両の減速時に運転者が要求する制動力F0が図2(a)で実線で示すものである。この場合の最高回生制動力は図2(a)に示す(F1)maxであり、ブレーキ鳴きが発生しない最低液圧は図2(b)に示されたPminである。これによれば、図2(a)に示す制動力の協調制御では、運転者のブレーキ操作によって回生制動力が大きくなり、図示の時刻t1に最高回生制動力(F1)maxに達する。図示の時間t1以降は最高回生制動力(F1)maxだけでは運転者が要求する制動力F0を賄い切れず、不足分(F0−(F1)max)を液圧ブレーキ5の液圧制動力F2によって補うこととなる。このときの液圧ブレーキ5の液圧Pの時間変化が図2(b)の破線に示されるが、単純に不足分(F1−(F1)max)を液圧ブレーキ5の液圧制動力F2によって補うには、破線にて示すように液圧Pが微小となり、ブレーキ鳴きが発生しない最低液圧Pminよりも小さい液圧となる。尚、図2(a)のF1は、この制御を継続したときの回生制動力の時間変化を示し、不足分(F0とF1の差)が液圧ブレーキ5の液圧制動力F2となる。
【0030】
本実施の形態では、最高回生制動力(F1)maxに達する時刻t1までの運転者によるブレーキペダル9の踏込み操作(ストローク)操作速度の変化から運転者が要求する制動力を予測し、このように液圧Pが微小で最低液圧Pminよりも小さくなる場合には、実線にて示すように液圧Pを最低液圧Pmin以上に高めて液圧制動力F2を増加させるとともに、その液圧制動力F2の増加分だけ回生制動力F1を図2(a)に示すF1からF1’へと矢印で示すようにΔF(=F1−F1’)だけ減少させるようにしている。換言すると、運転者が要求する制動力が、最高回生制動力(F1)maxと最低液圧Pminに満たない液圧Pで達成することになる場合には、液圧ブレーキ5の液圧Pが最低液圧Pminよりも大きくなるように回生制動力F1を減少させて、液圧ブレーキ5を最低液圧Pminよりも大きな液圧Pで作動させる。つまり、最高回生制動力(F1)maxを少し超える程度の制動力(運転者が要求する制動力)が予測されたときは、時刻t1に達する前に回生制動力の増加が終了し、液圧ブレーキ5の液圧Pの上昇が開始される。
【0031】
又、本発明においては、回生ブレーキ4と液圧ブレーキ5を協調制御して運転者が要求する制動力F0が得られた後、運転者が要求する制動力F0が増加した場合(運転者がブレーキペダル9を更に踏み込んだ場合)には、先ず回生制動力F0を最高回生制動力(F1)maxにまで増加させ、その後に液圧制動力F2を増加させる制御がなされる。これとは逆に、回生ブレーキ4と液圧ブレーキ5を協調制御して運転者が要求する制動力F0が得られた後、運転者が要求する制動力F0が減少した場合(運転者がブレーキペダル9を戻す操作をした場合)には、先ず液圧ブレーキ5の液圧Pを最低液圧Pminまで下げて液圧制動力F2を減少させ、その後に回生制動力F1を減少させる制御がなされる。
【0032】
図2には、この状態が示されており、具体的には、車両が停止する時で運転者がブレーキを緩める状態を示している。時間t2において、運転者が要求する制動力F0が減少し始める(運転者がブレーキを緩め始める)。先ず液圧ブレーキ5の液圧Pを最低液圧Pminまで下げて液圧制動力F2を減少させ、その後に回生制動力F1’を減少させる制御がなされる。その後、車速が低下して所定の回生制動が終了する速度に達すると、液圧ブレーキ5の液圧Pの上昇が開始され、回生制動の制動力を液圧ブレーキ5の制動力に置き換える。
【0033】
次に、本発明に係る協調ブレーキ制御装置20における制御手順を図3に示すフローチャートに従って以下に説明する。
【0034】
先ず、ブレーキ操作がなされたか否かが判定され(ステップS1)、ブレーキ操作がなされると(ステップS1の判定結果がYesであると)、ストロークセンサ15によって検出されるブレーキペダル9のストローク、ストロークの変化速度、及びストローク変化の加速度に基づいて運転者が要求する制動力(以下、「総制動力」と称する)F0を予想する(ステップS2)。詳細には、ストロークの変化速度や加速度にて、運転者のペダル操作の最終的なストローク終了位置を予測し、運転者が要求する総制動力F0を予想する。そして、総制動力F0を回生制動力F1と液圧制動力F2に配分する(ステップS3)。具体的には、次式によって総制動力F0が回生制動力F1と液圧制動力F2に配分される。
【0035】
総制動力F0が最高回生制動力(F1)max以下の場合:
回生制動力F1=総制動力F0
総制動力F0が最高回生制動力(F1)maxよりも大きいの場合:
回生制動力F1=最高回生制動力(F1)max
液圧制動力F2=(総制動力F0)−(回生制動力F1)
次に、上式によって配分された液圧制動力F2に相当する液圧ブレーキ5の液圧Pを算出し(ステップS4)、その液圧Pが最低液圧Pmin以上であるか否か(P≧Pmin)が判定される(ステップS5)。そして、液圧Pが最低液圧Pmin未満(P<Pmin)である場合(ステップS5での判定結果がNoである場合)には、液圧ブレーキ5においてブレーキ鳴きが発生する可能性があるために液圧Pを最低液圧Pmin以上に上げて液圧制動力F2を増加させ(ステップS6)、その液圧制動力F2の増加分だけ回生制動力を減少させる(ステップS7)。
【0036】
液圧Pが最低液圧Pmin以上(P≧Pmin)であるとき(ステップS5での判定結果がYesであるとき)及びステップS7の処理が終了すると、総制動力F0の増減があったか否かが判定される(ステップS8)。
【0037】
総制動力F0の増減があった場合(ステップS8での判定結果がYesで或る場合)には、増加であるか減少であるかが判定され(ステップS9)、増加である場合には、先ず回生制動力F1を増加させ(ステップS10)、回生制動力F1が最高回生制動力(F1)maxに達した後に液圧制動力F2を増加させ(ステップS11)、以後、以上の処理が繰り返される(ステップS14)。又、減少である場合には、先ず液圧ブレーキ5の液圧Pを最低液圧Pminまで下げて液圧制動力F2を減少させ(ステップS12)、その後に回生制動力F1を減少させ(ステップS13)、以後、以上の処理が繰り返される(ステップS14)。尚、総制動力F0の増減がない場合(ステップS9での判定結果がNoである場合)には、ステップS9〜S13の処理がスキップされてステップS1〜S8の処理が繰り返される(ステップS14)。
【0038】
以上のように、本発明によれば、液圧ブレーキ5にブレーキ鳴きが発生しない液圧Pの最低値(最低液圧Pmin)を設定し、運転者が要求する制動力(総制動力)F0に対する最高回生制動力(F1)maxの不足分を補う液圧制動力F2を発生させる液圧Pが最低液圧Pmin未満である場合には、液圧Pを最低液圧Pmin以上に高めて液圧制動力F2を増加させるようにしたため、各一対の前輪2と後輪12に設けられたブレーキ装置13のブレーキパッド13bの保持力を高めて振動の発生を防ぐことができ、ブレーキパッド13bの振動に伴うブレーキ鳴きの発生を確実に防ぐことができる。又、液圧制動力F2の増加分だけ回生制動力F1を減少させるようにしたため、運転者が要求する制動力(総制動力)F0を安定的に得ることができる。
【0039】
又、本発明では、既設のストロークセンサ15(又は踏力センサ)によって検出されるストロークの加速度(又は踏力の加速度)に基づいて運転者が要求する制動力(総制動力)F0を予測し、この予測した制動力F0から液圧ブレーキ5に必要な液圧Pを求めるようにしたため、ブレーキ鳴きを検知するブレーキ鳴き検知手段が不要となり、協調ブレーキ制御装置18のコストダウンと軽量化を図ることができる。尚、求められた液圧Pが最低液圧Pmin未満である場合には、液圧Pを最低液圧Pmin以上に高めて液圧制動力F2を増加させるとともに、液圧制動力F2の増加分だけ回生制動力F1を減少させる制御がなされる。
【0040】
更に。本発明によれば、回生ブレーキ4と液圧ブレーキ5を協調制御して運転者が要求する制動力F0が得られた後、その制動力F0が増加した場合には、先ず回生制動力F1を増加させるようにしたため、運動エネルギを電気エネルギとして効果的に回収して燃費の向上を図ることができる。これに対して、回生ブレーキ4と液圧ブレーキ5を協調制御して運転者が要求する制動力F0が得られた後、その制動力F0が減少した場合には、先ず液圧ブレーキ5の液圧Pを最低液圧Pminまで下げて液圧制動力F2を減少させ、その後に回生制動力F1を減少させるようにしたため、回生制動力F1を可能な限り長時間使用してより多くの運動エネルギを電気エネルギとして回収することができる。又、液圧ブレーキ5の液圧Pを最低液圧Pminに保持するようにしたため、車速の低下によって回生制動が終了するときの運転者の違和感を解消することができる。
【符号の説明】
【0041】
1 電動モータ
2 前輪
4 回生ブレーキ
5 液圧ブレーキ
6 モータコントローラ
7 アクセルペダル
8 アクセルポジションセンサ
9 ブレーキペダル
12 後輪
13 ブレーキ装置
13a ブレーキディスク
13b ブレーキパッド
14 液圧制御ユニット
15 ストロークセンサ
18 協調ブレーキ制御装置
【特許請求の範囲】
【請求項1】
液圧制動力を発生する液圧ブレーキと回生制動力を発生する回生ブレーキを協調制御して運転者が要求する制動力を得る車両の協調ブレーキ制御装置において、
前記液圧ブレーキの最低液圧を設定し、前記液圧ブレーキを使用する場合には該液圧ブレーキを前記最低液圧以上の液圧で作動させることを特徴とする車両の協調ブレーキ制御装置。
【請求項2】
前記回生ブレーキの最高回生制動力を設定し、運転者が要求する制動力に対する前記最高回生制動力の不足分を前記液圧制動力で補い、該液圧制動力を発生させる液圧が前記最低液圧未満である場合には、液圧を最低液圧以上に高めて液圧制動力を増加させるとともに、その液圧制動力の増加分だけ前記回生制動力を減少させることを特徴とする請求項1記載の車両の協調ブレーキ制御装置。
【請求項3】
ブレーキペダルのストロークを検出するストロークセンサ又はブレーキペダルに加えられる踏力を検出する踏力センサを設け、前記ストロークセンサによって検出されるストロークの加速度又は前記踏力センサによって検出される踏力の加速度に基づいて運転者が要求する制動力を予測することを特徴とする請求項1又は2記載の車両の協調ブレーキ制御装置。
【請求項4】
前記液圧ブレーキと前記回生ブレーキを協調制御して運転者が要求する制動力が得られた後、運転者が要求する制動力が増加した場合には、先ず回生制動力を増加させ、その後に液圧制動力を増加させることを特徴とする請求項1〜3の何れかに記載の車両の協調ブレーキ制御装置。
【請求項5】
前記液圧ブレーキと前記回生ブレーキを協調制御して運転者が要求する制動力が得られた後、運転者が要求する制動力が減少した場合には、先ず液圧ブレーキの液圧を最低液圧まで下げて液圧制動力を減少させ、その後に回生制動力を減少させることを特徴とする請求項1〜4の何れかに記載の車両の協調ブレーキ制御装置。
【請求項1】
液圧制動力を発生する液圧ブレーキと回生制動力を発生する回生ブレーキを協調制御して運転者が要求する制動力を得る車両の協調ブレーキ制御装置において、
前記液圧ブレーキの最低液圧を設定し、前記液圧ブレーキを使用する場合には該液圧ブレーキを前記最低液圧以上の液圧で作動させることを特徴とする車両の協調ブレーキ制御装置。
【請求項2】
前記回生ブレーキの最高回生制動力を設定し、運転者が要求する制動力に対する前記最高回生制動力の不足分を前記液圧制動力で補い、該液圧制動力を発生させる液圧が前記最低液圧未満である場合には、液圧を最低液圧以上に高めて液圧制動力を増加させるとともに、その液圧制動力の増加分だけ前記回生制動力を減少させることを特徴とする請求項1記載の車両の協調ブレーキ制御装置。
【請求項3】
ブレーキペダルのストロークを検出するストロークセンサ又はブレーキペダルに加えられる踏力を検出する踏力センサを設け、前記ストロークセンサによって検出されるストロークの加速度又は前記踏力センサによって検出される踏力の加速度に基づいて運転者が要求する制動力を予測することを特徴とする請求項1又は2記載の車両の協調ブレーキ制御装置。
【請求項4】
前記液圧ブレーキと前記回生ブレーキを協調制御して運転者が要求する制動力が得られた後、運転者が要求する制動力が増加した場合には、先ず回生制動力を増加させ、その後に液圧制動力を増加させることを特徴とする請求項1〜3の何れかに記載の車両の協調ブレーキ制御装置。
【請求項5】
前記液圧ブレーキと前記回生ブレーキを協調制御して運転者が要求する制動力が得られた後、運転者が要求する制動力が減少した場合には、先ず液圧ブレーキの液圧を最低液圧まで下げて液圧制動力を減少させ、その後に回生制動力を減少させることを特徴とする請求項1〜4の何れかに記載の車両の協調ブレーキ制御装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2013−14208(P2013−14208A)
【公開日】平成25年1月24日(2013.1.24)
【国際特許分類】
【出願番号】特願2011−147851(P2011−147851)
【出願日】平成23年7月4日(2011.7.4)
【出願人】(000002082)スズキ株式会社 (3,196)
【Fターム(参考)】
【公開日】平成25年1月24日(2013.1.24)
【国際特許分類】
【出願日】平成23年7月4日(2011.7.4)
【出願人】(000002082)スズキ株式会社 (3,196)
【Fターム(参考)】
[ Back to top ]