
車両の回生発電制御装置

【課題】アクセルオフ操作によるコースト走行時、車両トータルとしてのエネルギ回収率の改善を図ること。
【解決手段】ハイブリッド車両の回生発電制御装置は、副変速機付き無段変速機CVTと、モータ/ジェネレータMGと、統合コントローラ10と、を備える。副変速機付き無段変速機CVTは、左右タイヤLT,RTに対して動力を伝達する。モータ/ジェネレータMGは、動力伝達経路からの動力により発電を行う。統合コントローラ10は、アクセルオフ操作によるコースト走行時に、ip=1近傍制御を実施することにより、副変速機付き無段変速機CVTへの変速油圧の元圧であるライン圧PLを低下させた上で回生発電制御を行う(図4)。
【解決手段】ハイブリッド車両の回生発電制御装置は、副変速機付き無段変速機CVTと、モータ/ジェネレータMGと、統合コントローラ10と、を備える。副変速機付き無段変速機CVTは、左右タイヤLT,RTに対して動力を伝達する。モータ/ジェネレータMGは、動力伝達経路からの動力により発電を行う。統合コントローラ10は、アクセルオフ操作によるコースト走行時に、ip=1近傍制御を実施することにより、副変速機付き無段変速機CVTへの変速油圧の元圧であるライン圧PLを低下させた上で回生発電制御を行う(図4)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、降坂路等でのアクセルオフ操作によるコースト走行時(=慣性走行時)、回生発電制御を行う車両の回生発電制御装置に関する。
【背景技術】
【0002】
ナビゲーション装置などの道路状況検出手段によって車両前方に降坂路が検出された場合に、発電機による発電効率を高くする車両用制御装置が開示されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−217203号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の車両用制御装置にあっては、降坂路において発電効率を高くする際に、無段変速機の変速比をロー側に大きくし、コースト状態での変速機入力回転数を増大するようにしている。このように、変速比をロー側に移行させる変速比制御を行うため、ライン圧を高める必要があり、ライン圧を作り出すオイルポンプの負荷が大きくなるし、無段変速機のフリクショントルクが大きくなる。このため、発電エネルギを回収するために余分に使われるエネルギ損失を考慮した場合、車両トータルとしてのエネルギ回収率が改善されない、という問題があった。
【0005】
本発明は、上記問題に着目してなされたもので、アクセルオフ操作によるコースト走行時、車両トータルとしてのエネルギ回収率の改善を図ることができる車両の回生発電制御装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するため、本発明の車両の回生発電制御装置は、無段変速機と、発電機と、回生発電制御手段と、を備える手段とした。
前記無段変速機は、駆動輪に対して動力を伝達する。
前記発電機は、動力伝達経路からの動力により発電を行う。
前記回生発電制御手段は、アクセルオフ操作によるコースト走行時に、前記無段変速機への変速油圧の元圧であるライン圧を低下させた上で回生発電を行う。
【発明の効果】
【0007】
よって、アクセルオフ操作によるコースト走行時に、回生発電制御手段において、無段変速機への変速油圧の元圧であるライン圧を低下させた上で回生発電が行われる。
すなわち、回生発電を行うとき、ライン圧を低下させることで、ライン圧を作り出すオイルポンプの負荷が低減される。このため、ポンプ負荷低減分を、回生電力としてバッテリに蓄積することができ、燃費や電費が向上する。
この結果、アクセルオフ操作によるコースト走行時、車両トータルとしてのエネルギ回収率の改善を図ることができる。
【図面の簡単な説明】
【0008】
【図1】実施例1の回生発電制御装置が適用された前輪駆動または後輪駆動によるハイブリッド車両を示す全体システム図である。
【図2】実施例1の回生発電制御装置が適用されたハイブリッド車両の駆動系に有する副変速機付き無段変速機を示す概略図である。
【図3】実施例1の回生発電制御装置が適用されたハイブリッド車両の駆動系に有する副変速機付き無段変速機における車速とアクセル開度とプライマリ回転数の関係の一例を示す変速線図である。
【図4】実施例1の統合コントローラにて実行される回生発電制御処理を示すメインルーチンフローチャートである。
【図5】実施例1の統合コントローラにて実行される回生発電制御処理のうちip=1近傍制御処理を示すサブルーチンフローチャートである。
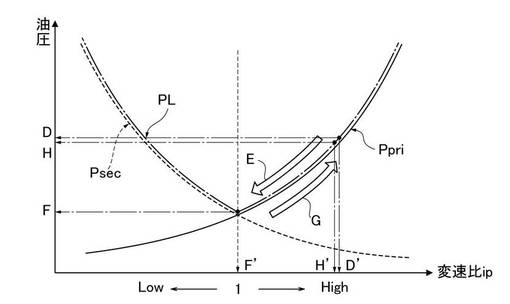
【図6】ベルト式無段変速機構において変速比ipに対するプライマリプーリ圧Ppriとセカンダリプーリ圧Psecとライン圧PLの関係を示す変速油圧特性図である。
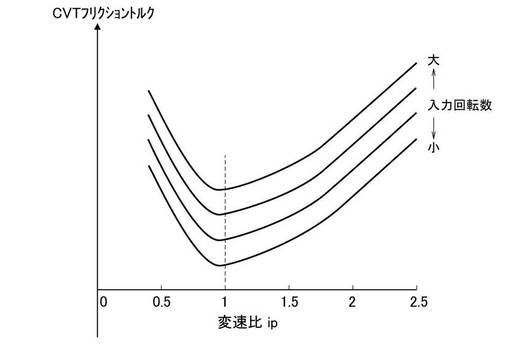
【図7】ベルト式無段変速機構において入力回転数をパラメータとし変速比ipに対するCVTフリクショントルクの関係を示すフリクショントルク特性図である。
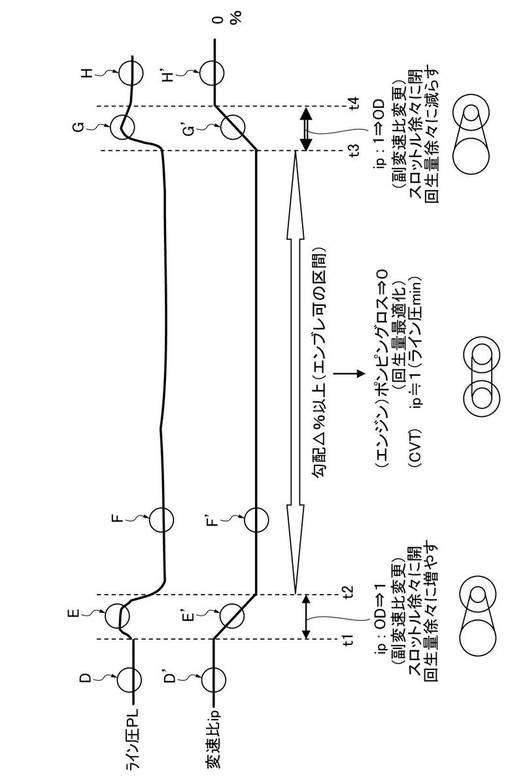
【図8】実施例1のip=1近傍制御を伴う回生発電制御が行われる降坂路でのコースト定速走行時におけるライン圧・変速比の各特性を示すタイムチャートである。
【発明を実施するための形態】
【0009】
以下、本発明の車両の回生発電制御装置を実現する最良の形態を、図面に示す実施例1に基づいて説明する。
【実施例1】
【0010】
まず、構成を説明する。
実施例1の車両の回生発電制御装置の構成を、「全体システム構成」、「副変速機付き無段変速機構成」、「回生発電制御構成」に分けて説明する。
【0011】
[全体システム構成]
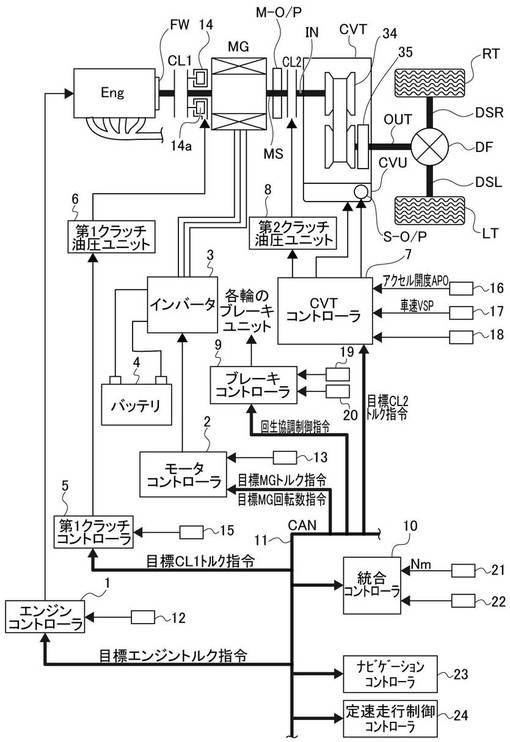
図1は、実施例1の回生発電制御装置が適用された前輪駆動または後輪駆動によるハイブリッド車両を示す全体システム図である。
【0012】
ハイブリッド車両の動力伝達経路には、図1に示すように、エンジンEngと、フライホイールFWと、第1クラッチCL1と、モータ/ジェネレータMG(発電機)と、メインオイルポンプM-O/Pと、サブオイルポンプS-O/Pと、第2クラッチCL2と、副変速機付き無段変速機CVT(無段変速機)と、変速機入力軸INと、変速機出力軸OUTと、を備える。そして、変速機出力軸OUTの下流側には、ディファレンシャルDFと、左ドライブシャフトDSLと、右ドライブシャフトDSRと、左タイヤLT(駆動輪)と、右タイヤRT(駆動輪)と、を有する。
【0013】
前記エンジンEngは、ガソリンエンジンやディーゼルエンジンであり、エンジンコントローラ1からのエンジン制御指令に基づいて、エンジン始動制御やエンジン停止制御やスロットルバルブのバルブ開度制御や燃料カット制御、等が行われる。なお、エンジン出力軸には、フライホイールFWが設けられている。
【0014】
前記第1クラッチCL1は、エンジンEngとモータ/ジェネレータMGの間に介装されたクラッチである。第1クラッチコントローラ5からの第1クラッチ制御指令に基づき第1クラッチ油圧ユニット6により作り出された第1クラッチ制御油圧により、締結・半締結状態・解放が制御される。
【0015】
前記モータ/ジェネレータMGは、ロータに永久磁石を埋設しステータにステータコイルが巻き付けられた同期型モータ/ジェネレータである。モータコントローラ2からの制御指令に基づいて、インバータ3により作り出された三相交流を印加することにより制御される。モータ/ジェネレータMGは、バッテリ4からの電力の供給を受けて回転駆動する電動機として動作することができる(力行)。また、モータ/ジェネレータMGのロータがエンジンEngや駆動輪から回転エネルギを受ける場合には、ステータコイルの両端に起電力を生じさせる発電機として機能し、バッテリ4を充電することができる(回生)。
【0016】
前記メインオイルポンプM-O/Pは、モータ/ジェネレータMGのモータ軸MSにより駆動される。メインオイルポンプM-O/Pは、副変速機付き無段変速機CVTに付設される油圧コントロールバルブユニットCVU(第1クラッチ油圧ユニット6、第2クラッチ油圧ユニット8を含む)に対する油圧源とされる。そして、停車時等のように、メインオイルポンプM-O/Pからの吐出圧が見込めないときや不足するときのため、メインオイルポンプM-O/Pとは別に、電動モータにより駆動されるサブオイルポンプS-O/Pが設けられる。
【0017】
前記第2クラッチCL2は、モータ/ジェネレータMGと左右タイヤLT,RTの間のうち、モータ軸MSと変速機入力軸INの間に介装されたクラッチである。第2クラッチCL2は、CVTコントローラ7からの第2クラッチ制御指令に基づき、第2クラッチ油圧ユニット8により作り出された制御油圧により、締結・スリップ締結・解放が制御される。
【0018】
前記副変速機付き無段変速機CVTは、第2クラッチCL2の下流位置に配置され、車速VSPやアクセル開度APOに応じて目標入力回転数を決め、無段階による変速比を自動的に変更する。副変速機付き無段変速機CVTは、無段変速比を得るベルト式無段変速機構34に、2段階の変速段を持つ副変速機構35を組み合わせて構成され、プーリを小型化しながら、変速比幅の拡大を実現するものである。これにより、発進時や低速時におけるレスポンスン向上と、高速走行時における変速機入力回転数の低回転化を両立し、燃費や電費の向上を目指している。
【0019】
前記変速機出力軸OUTには、図外の終減速機構を介してディファレンシャルDFが連結され、ディファレンシャルDFから、左ドライブシャフトDSLと右ドライブシャフトDSRを介してそれぞれに左右タイヤLT,RTが設けられている。
【0020】
前記ハイブリッド車両は、駆動形態の違いによる走行モードとして、電気自動車走行モード(以下、「EVモード」という。)と、ハイブリッド車走行モード(以下、「HEVモード」という。)と、駆動トルクコントロール走行モード(以下、「WSCモード」という。なお、WSCは、「Wet Start Clutch」の略である。)と、を有する。
【0021】
前記「EVモード」は、第1クラッチCL1を解放状態とし、モータ/ジェネレータMGを駆動源として走行するモードであり、モータ走行モード・回生走行モードを有し、何れかのモードにより走行する。この「EVモード」は、要求駆動力が低く、バッテリSOCが確保されているときに選択される。
【0022】
前記「HEVモード」は、第1クラッチCL1を締結状態とし、エンジンEngとモータ/ジェネレータMGを駆動源として走行するモードであり、モータアシスト走行モード・発電走行モード・エンジン走行モードを有し、何れかのモードにより走行する。この「HEVモード」は、要求駆動力が高いとき、あるいは、バッテリSOCが不足するようなときに選択される。
【0023】
前記「WSCモード」は、モータ/ジェネレータMGの回転数制御とクラッチ油圧制御により、第2クラッチCL2をスリップ締結状態に維持し、第2クラッチCL2を経過するクラッチ伝達トルクが、車両状態やドライバ操作に応じて決まる要求駆動トルクとなるようにクラッチトルク容量をコントロールするモードである。この「WSCモード」は、「HEVモード」の選択状態での停車時・発進時等のように、エンジン回転数がアイドル回転数を下回るような走行領域やポンプ吐出油が不足するような領域において選択される。
【0024】
次に、ハイブリッド車両の制御系を説明する。
ハイブリッド車両の制御系は、図1に示すように、エンジンコントローラ1と、モータコントローラ2と、第1クラッチコントローラ5と、CVTコントローラ7と、ブレーキコントローラ9と、ナビゲーションコントローラ23と、定速走行制御コントローラ24と、統合コントローラ10と、を有して構成されている。なお、各コントローラ1,2,5,7,9,23,24と、統合コントローラ10とは、情報交換が互いに可能なCAN通信線11を介して接続されている。
【0025】
前記エンジンコントローラ1は、エンジン回転数センサ12からのエンジン回転数情報と、統合コントローラ10からの目標エンジントルク指令と、他の必要情報を入力する。そして、エンジン動作点(Ne,Te)を制御する指令を、エンジンEngのスロットルバルブアクチュエータ等へ出力する。
【0026】
前記モータコントローラ2は、モータ/ジェネレータMGのロータ回転位置を検出するレゾルバ13からの情報と、統合コントローラ10からの目標MGトルク指令および目標MG回転数指令と、他の必要情報を入力する。そして、モータ/ジェネレータMGのモータ動作点(Nm,Tm)を制御する指令をインバータ3へ出力する。なお、モータコントローラ2は、モータトルクを目標トルクとし、回転数を駆動系の回転に追従させるトルク制御を基本制御とする。しかし、第2クラッチCL2のスリップ制御時、等においては、モータ回転数を目標回転数とし、トルクを駆動系負荷に追従させる回転数制御を行う。また、モータコントローラ2は、バッテリ4の充電容量をあらわすバッテリSOCを監視していて、バッテリSOC情報を、CAN通信線11を介して統合コントローラ10へ供給する。
【0027】
前記第1クラッチコントローラ5は、油圧アクチュエータ14のピストン14aのストローク位置を検出する第1クラッチストロークセンサ15からのセンサ情報と、統合コントローラ10からの目標CL1トルク指令と、他の必要情報を入力する。そして、第1クラッチCL1の締結・半締結・解放を制御する指令を油圧コントロールバルブユニットCVU内の第1クラッチ油圧ユニット6に出力する。
【0028】
前記CVTコントローラ7は、アクセル開度センサ16と、車速センサ17と、他のセンサ類18等からの情報を入力する。そして、Dレンジを選択しての走行時、アクセル開度APOと車速VSPにより決まる目標入力回転数をシフトマップにより検索し、検索された目標入力回転数(変速比)を得る制御指令を油圧コントロールバルブユニットCVUに出力する。この変速比制御に加え、制御油圧の元圧であるライン圧PLを制御するライン圧制御を行う。ライン圧制御は、プライマリプーリ圧Ppri、セカンダリプーリ圧Psec、ローブレーキ圧、ハイクラッチ圧、リバースブレーキ圧の必要油圧のうち、最大圧を目標ライン圧とし、ライン圧制御指令を決める。そして、ライン圧制御指令を、油圧コントロールバルブユニットCVUに設けた図外のライン圧ソレノイドに出力することで行う。
【0029】
前記ブレーキコントローラ9は、4輪の各車輪速を検出する車輪速センサ19と、ブレーキストロークセンサ20からのセンサ情報と、統合コントローラ10からの回生協調制御指令と、他の必要情報を入力する。そして、例えば、ブレーキ踏み込み制動時、ブレーキストロークBSから求められる要求制動力に対し回生制動力だけでは不足する場合、その不足分を機械制動力(液圧制動力やモータ制動力)で補うように、回生協調ブレーキ制御を行う。
【0030】
前記ナビゲーションコントローラ23は、車両の道順案内等を行いドライバの運転を支援する車載システムの中枢となるコントローラである。すなわち、GPS衛星を利用して現在位置を自動的に割り出し、システムに記録された地図と照らし合わせることでドライバの運転を支援する他、無線通信を行い、天候・道路状況等の情報提供を行う。ここでは、自車の走行が予定される前方道路の路面勾配情報(平坦路、下り勾配路、上り勾配路)を統合コントローラ10に提供する。
【0031】
前記定速走行制御コントローラ24は、路面勾配等による走行負荷変動にかかわらず、ドライバが設定した設定車速を保ちながら車両を走行させる制御を行うコントローラである。一般に、ASCD(Auto Speed Control Deviceの略称)やACC(Adaptive Cruise Control Systemの略称)等と呼ばれるシステムが代表的であり、ドライバが、ASCDやACC等による定速走行制御を選択すると、定速走行制御選択情報を統合コントローラ10に提供する。
【0032】
前記統合コントローラ10は、車両全体の消費エネルギを管理し、最高効率で車両を走らせるための機能を担うものである。この統合コントローラ10には、モータ回転数Nmを検出するモータ回転数センサ21や他のセンサ・スイッチ類22からの必要情報がCAN通信線11を介して入力される。加えて、ナビゲーションコントローラ23からの路面勾配情報や定速走行制御コントローラ24からの定速走行制御選択情報が入力される。そして、アクセルオフによる定速走行制御での走行中に降坂路に入ったら、下り勾配による走行負荷の低減分を発電負荷として与えるように統合コントローラ10からモータコントローラ2へ回生発電指令が出力される。そして、この回生発電制御の際には、同時に、統合コントローラ10からCVTコントローラ7に対し、変速比ipを1の近傍とするip=1近傍制御が実行される。
【0033】
[副変速機付き無段変速機構成]
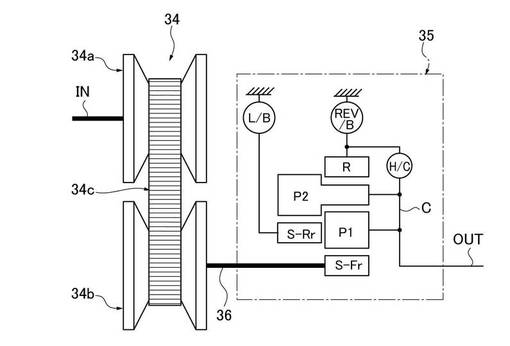
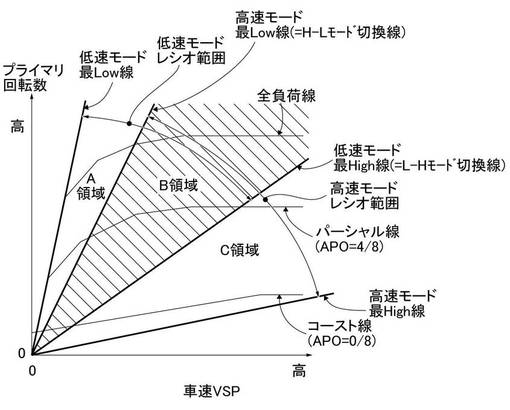
図2は、副変速機付き無段変速機の概略構成を示し、図3は、副変速機付き無段変速機の変速線図を示す。以下、図2及び図3に基づいて、副変速機付き無段変速機CVTの構成を説明する。
【0034】
前記副変速機付き無段変速機CVTは、図2に示すように、ベルト式無段変速機構34に副変速機構35を組み合わせて構成される。
【0035】
前記ベルト式無段変速機構34は、変速機入力軸INに設けられたプライマリプーリ34aと、セカンダリプーリ軸36に設けられたセカンダリプーリ34bと、両プーリ34a,34bに掛け渡されたベルト34cを主要構成とする。そして、ポンプ吐出圧を元圧とし、図外のプレッシャレギュレータバルブにより作り出されたライン圧PLに基づき、プライマリプーリ圧Ppriとセカンダリプーリ圧Psecを作り出す。両プーリ圧Ppri,Psecによるプーリ推力を、プライマリプーリ34aの可動プーリとセカンダリプーリ34bの可動プーリに作用させ、両可動プーリを軸方向に動かし、ベルト34cへのプーリ接触径を変化させることで、変速比ipを無段階に変更する(図7参照)。
【0036】
前記副変速機構35は、前進走行段として、低速モードと高速モードを有し、後退走行段として、後退モードを有し、これらのモードを運転状態に応じて切り換える変速機構である。副変速機構35は、ラビニヨー型遊星歯車と変速用の摩擦締結要素により構成される。ラビニヨー型遊星歯車は、ダブルピニオン遊星歯車(S-Fr、P1、P2、R)とシングルピニオン遊星歯車(S-Rr、P1、R)を組み合わせた構成である。つまり、セカンダリプーリ軸26に設けられ、第1ピニオンP1に噛み合うフロントサンギアS-Frと、第2ピニオンP2に噛み合うリヤサンギアS-Rrと、変速機出力軸OUTに直結された共通キャリアCと、第2ピニオンP2に噛み合うリングギアRと、による4つの回転要素を有する。変速用の摩擦要素としては、低速モードの選択時に締結され、リヤサンギアS-Rrをケース固定可能なローブレーキL/Bと、高速モードの選択時に締結され、共通キャリアCとリングギアRを連結可能なハイクラッチH/Cと、後退モードの選択時に締結され、リングギアRをケース固定可能なリバースブレーキR/Bと、を有する。なお、ハイクラッチH/Cは、4つの回転要素の何れか2つの回転要素を連結可能な位置に設けたものであれば良い。
【0037】
前記副変速機付き無段変速機CVTは、CVTコントローラ7により変速比制御される。すなわち、ローブレーキL/Bを締結した低速モードの選択時、車速VSPとアクセル開度APOにより決まる運転点が、図3に示す変速線図のA領域とB領域に存在する限り低速モードの選択を維持する。そして、運転点が、図3に示す変速線図の低速モード最High線(=L-Hモード切換線)を横切ると、低速モードから高速モードへ移行する制御指令を出す。また、ハイクラッチH/Cを締結した高速モードの選択時、車速VSPとアクセル開度APOにより決まる運転点が、図3に示す変速線図のB領域とC領域に存在する限り高速モードの選択を維持する。そして、運転点が、図3に示す変速線図の高速モード最Low線(=H-Lモード切換線)を横切ると、高速モードから低速モードへ移行する制御指令を出す。これにより、低速モードの選択時の変速比幅(A領域+B領域)と高速モードの選択時の変速比幅(B領域+C領域)を狭くし、両プーリ34a,34bの小型化を達成しながら、トータル変速比幅(A領域+B領域+C領域)の拡大が実現される。
【0038】
[回生発電制御構成]
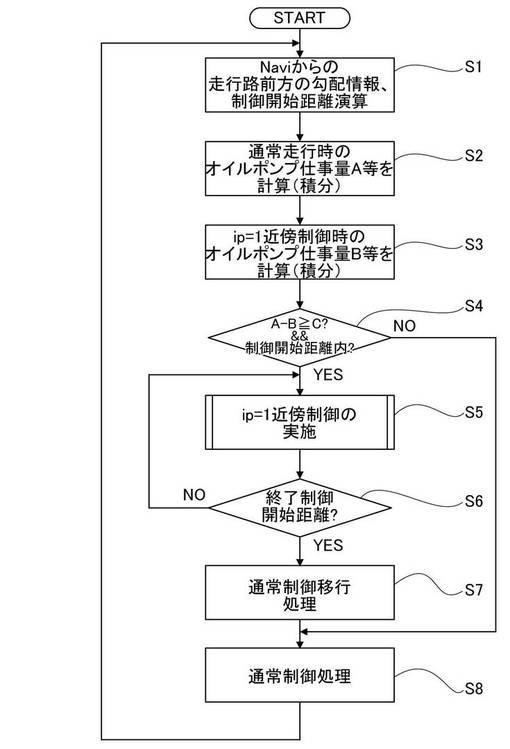
図4は、実施例1の統合コントローラ10で行われる回生発電制御処理のメインルーチンを示すフローチャートであり、図5は、回生発電制御処理のうちip=1近傍制御処理を示すフローチャートである(回生発電制御手段)。以下、図4及び図5に基づき、回生発電制御構成をあらわす各ステップについて説明する。なお、図4及び図5のフローチャートは、ASCDやACC等による定速走行制御の選択時に実行される。
【0039】
ステップS1では、ACC等の定速走行制御中に、ナビゲーションコントローラ23から自車の走行が予定される前方道路の路面勾配情報(平坦路、下り勾配路、上り勾配路)を読み込むと共に、制御開始距離を演算し、ステップS2へ進む。
ここで、制御開始距離は、前方道路の路面勾配が下り勾配であるとき、車両が降坂路にさしかかる前にip=1近傍制御を開始する距離である。制御開始距離の演算は、地形情報からの勾配継続距離と、現在の車速、副変速機付き無段変速機CVTの変速速度等により最適な距離が演算される。
【0040】
ステップS2では、ステップS1での前方道路の路面勾配情報読み込みと制御開始距離の演算に続き、ip=1近傍制御が有効に働く道路情報を認識すると、ip=1近傍制御を実施しない通常走行時に必要となるオイルポンプ負荷とフリクションの積分値による仕事量Aを演算し、ステップS3へ進む。
ここで、各フリクション情報は、各モジュールの動作条件によりマップを予め作成しておき、その値を読み出すことにより制御開始から終了までのフリクション、および減速度等のプロファイルを規定する。また、オイルポンプ負荷は、現在の変速比ipを保つライン圧制御を行うときのポンプ負荷とする。
【0041】
ステップS3では、ステップS2での仕事量Aの演算に続き、ip=1近傍制御を実施した場合に必要となるオイルポンプ負荷とフリクションの積分値による仕事量Bを演算し、ステップS3へ進む。
ここで、各フリクション情報は、ステップS2と同様であり、オイルポンプ負荷は、変速比ipを、ip=1とする最小ライン圧制御を行うときのポンプ負荷とする。
【0042】
ステップS4では、ステップS3での仕事量Bの演算に続き、仕事量Aと仕事量Bの差分が設定値C以上であり、かつ、自車が制御開始距離内にあるか否かを判断する。YES(A−B≧C、かつ、制御開始距離に到達)の場合はステップS5へ進み、NO(A−B<C、または、制御開始距離に未達)の場合はステップS8へ進む。
ここで、仕事量Aと仕事量Bの差分は、ライン圧PLを低下させることで増加する回生エネルギと、ライン圧PLを低下させるのに必要なエネルギと、の差であるエネルギ収支に相当する(エネルギ収支演算手段)。
また、Cの値は、エネルギ回収率を規定する係数であるが、制御上、ドライバに違和感を与えない範囲でなるべく小さな値に設定される。
【0043】
ステップS5では、ステップS4でのA−B≧C、かつ、制御開始距離に到達であるとの判断、あるいは、ステップS6での終了制御開始距離に未達であるとの判断に続き、ip=1近傍制御を実施し(図5)、ステップS6へ進む。
このステップS5では、ip=1近傍制御の実施によりライン圧PLを下げた上でモータ/ジェネレータMGにより回生発電が行われる。
【0044】
ステップS6では、ステップS5でのip=1近傍制御の実施に続き、演算された終了制御開始距離に到達したか否かを判断する。YES(終了制御開始距離に到達)の場合はステップS7へ進み、NO(終了制御開始距離に未達)の場合はステップS5へ戻る。
ここで、終了制御開始距離は、制御開始距離と同様に、勾配継続距離と、現在の車速、副変速機付き無段変速機CVTの変速速度等により計算する。
【0045】
ステップS7では、ステップS6での終了制御開始距離に到達であるとの判断に続き、車両が終了制御開始距離(制御開始位置からの相対距離)に到達すると、アクセル開度APOと車速VSPにより目標変速比を決める通常の変速比制御に戻す終了制御を開始する通常制御移行処理を実施し、ステップS8へ進む。
【0046】
ステップS8では、ステップS7での通常制御移行処理の実施に続き、現在のアクセル開度APOと車速VSPより最適な変速比を得る変速比制御による通常制御処理を実施し、ステップS1へ戻る。
すなわち、通常のACC等による定速走行制御に移行する。そして、ACC等による定速走行制御時は、常にステップS1に戻り、エネルギ回収のための判断/制御を繰り返す。
【0047】
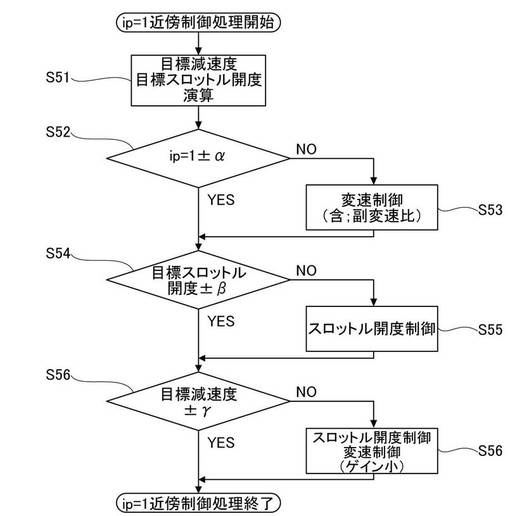
ステップS51では、図5のサブルーチンが呼び出されてip=1近傍制御が開始されると、現在位置での目標スロットル開度と目標減速度を演算し、ステップS52へ進む(目標減速度演算部)。
ここで、目標スロットル開度と目標減速度は、パラメータの中で単位時間の変化率が最小であるベルト式無段変速機構34の変速速度に基づいてステップS1〜ステップS2にて目標減速度のプロファイルを計算し、目標減速度のプロファイルに基づいて演算する。
【0048】
ステップS52では、ステップS51での目標スロットル開度と目標減速度の演算に続き、車両が降坂路にさしかかる前に開始されたip=1近傍制御による副変速機付き無段変速機CVTの変速比ipが、ip=1±αであるか否かを判断する。YES(ip=1±α)の場合はステップS54へ進み、NO(ip≠1±α)の場合はステップS53へ進む。
ここで、ip=1近傍制御は、時定数の大きなCVT変速比制御から開始される。変速比許容誤差αは、現在の変速比と単位時間当たりの変速速度より計算する。
【0049】
ステップS53では、ステップS52でのip≠1±αであるとの判断に続き、副変速機付き無段変速機CVTの変速比ipを、徐々にip=1に近づけていく変速比制御(この変速比制御には、副変速機構35の制御も含まれる)を行い、ステップS54へ進む。
【0050】
ステップS54では、ステップS52でのip=1±αであるとの判断、あるいは、ステップS53での変速比制御に続き、実スロットル開度が目標スロットル開度±βか否かを判断する。YES(実スロットル開度=目標スロットル開度±β)の場合はステップS56へ進み、NO(実スロットル開度≠目標スロットル開度±β)の場合はステップS55へ進む。
【0051】
ステップS55では、ステップS54での実スロットル開度≠目標スロットル開度±βであるとの判断に続き、電子スロットルを制御することにより、実スロットル開度を目標スロットル開度に近づける制御を実施し、ステップS56へ進む。
このスロットル開度制御は、減速度を制御するためであり、急激にスロットル開度を制御すると違和感が生じるため定数βにて変化を抑制する。
【0052】
ステップS56では、ステップS54での実スロットル開度=目標スロットル開度±βであるとの判断、あるいは、ステップS55でのスロットル開度制御に続き、実減速度が目標減速度±γか否かを判断する。YES(実減速度=目標減速度±γ)の場合はip=1近傍制御終了へ進み、NO(実減速度≠目標減速度±γ)の場合はステップS57へ進む。
【0053】
ステップS57では、ステップS56での実減速度≠目標減速度±γであるとの判断に続き、ゲイン小によるスロットル開度制御と変速比制御の少なくとも一方の制御により、減速度の補償を行い、ip=1近傍制御終了へ進む(減速度補償制御部)。
この減速度補償制御は、上記変速比制御と上記スロットル開度制御の結果、あらかじめ予測した減速度のプロファイルとの誤差が生じた場合にはその差分を補償するために行う。減速度補償制御でのパラメータは、変速比とスロットル開度であり、必要な時定数に応じて変速比、もしくは、スロットル開度を適切に割り当て、減速度変化率により違和感を与えないように設定した定数γを超えないように実施する。
ここで、ip=1近傍制御終了へ進むと制御ルーチンは終了であるが、終了制御開始距離の判定(ステップS6)の条件が成立するまでは、同サブルーチンが呼び出される。尚、パラメータC、α、β、およびγは、車両の特性により異なる値であるため、実験により最適値を得ることになる。
【0054】
次に、作用を説明する。
まず、「回生発電制御技術の課題」の説明を行う。続いて、実施例1の車両の回生発電制御装置における作用を、「回生発電制御技術の背景と考え方」、「コースト定速走行時の回生発電制御作用」、「コースト定速走行時のip=1近傍制御作用」、「コースト定速走行時の燃費向上作用」に分けて説明する。
【0055】
[回生発電制御技術の課題]
ASCDやACC等による定速走行時に、燃費を向上させるには、ドライブ側でエンジン運転効率の良い回転域に無段変速機の変速比を制御するのが一般的である。それに対して、コースト側では車両の慣性エネルギを効率良く回生することが必要となる。
【0056】
また、ASCDやACC等による定速走行時には、ドライバのアクセル操作が伴わない。このため、ドライバのアクセル操作によらず、運転性を損なわない範囲で、エンジン及び無段変速機の運転状態をシステムが統合制御し、各運転状態における最大回生量を得ることが可能となる。
【0057】
例えば、下り坂で多くの発電量が必要となる場合、変速比を大としてオルタネータの効率を上げるのは公知である。しかしながら、運転状態によっては、ロー変速によるコーストトルクの増大、更に、無段変速機のフリクションが大の条件と重なり、車両トータルのエネルギ回収率が悪化し、結果として、車両トータルのエネルギ回収率がそれほど改善されないことも考えられる。
【0058】
[回生発電制御技術の背景と考え方]
そこで、オルタネータの回生効率のみに注目するのではなく、車両トータルの効率を考え、無段変速機やエンジンのフリクションを下げる事でオルタネータの効率がさほど良くない領域でも所望の回生量を実現することが可能となる。
【0059】
無段変速機は、変速比ipが、ip=1の運転状態のフリクションがもっとも低いのは公知(特開平11-191903号公報等)である。しかし、一般的に無段変速機の変速比を大きく変化させるには、数秒単位の変速時間を要するため、走行路の状況が大きく変化しないことを事前に知ることが出来ないと、変速比を大きく変化させるような制御に移行することは難しい。
【0060】
ところで、現在道路の曲率、勾配、制限速度等のデータベース化が進んでおり、ナビゲーションシステム等にデータを格納することで、現在走行中の地点より先の道路情報を読出し、現在のASCDやACC等での設定車速を維持する前提で勾配等の道路情報を時系列でマップ化することが可能となりつつある。
【0061】
ASCDやACC等による定速走行制御を行うには、道路勾配の先読みを実施し、時系列で車両に必要な減速度を計算し、各時刻で適切な減速度(フリクション変化)をエンジンや無段変速機等の各構成要素を制御することにより実現する必要がある。
【0062】
同様の方法で、時系列の道路情報を入手することにより、前述の無段変速機の変速比の大幅な変化が伴うような時定数大となる制御も、走行路の変化に応じて無理なく実施することが可能となる。
【0063】
例えば、有料道路走行中、しばらくインターチェンジがなく長時間ほぼ一定の勾配が継続する場合などは、無段変速機のフリクションを下げ、回生効率を上げるのに適した状況である。
【0064】
長時間ほぼ一定の勾配が継続する場合、無段変速機の変速比ipを、ip=1近傍で制御しても運転性(音振性能)上問題なければ、ip=1近傍での運転に切り替えることで、変速によるコーストトルクの上昇を考慮しても、数Nmのフリクション低減ができることとなる(図7参照)。このフリクション低減分を、オルタネータの駆動トルクを増大分とするができることで、結果、高い回生電流の要求に対応することが可能となる。
【0065】
前記無段変速機の変速比ipを、ip=1近傍での運転を実現するためには、道路勾配の細かな変化に対し制御の異なる時定数の制御を併用する必要がある。その際、無段変速機の変速よりも時定数の低い電子スロットル制御によるポンプロス増減が有効であり、オルタネータにインバータの接続されている車両では、インバータによる回生負荷の増減等が有効である。
【0066】
前記無段変速機の変速比ipを、ip=1近傍で運転する制御を行うことにより、常にライン圧の低いip=1を原点とした制御に移行する(図6参照)。このため、制御実施中のトータルエネルギロスが低減され、効果的に慣性エネルギの回収が行える走行シーンが増えることとなり、ドライブ側での走行時に蓄積したエネルギを利用することが可能となる。
【0067】
ドライブ側で蓄積したエネルギを使用する際は、コースト側と同様にナビゲーションシステム等から勾配情報を得ることにより、充電可能な下り勾配が長時間続く場合には、下り勾配に到達する前に予め走行エネルギのモータ分担率を上げる。これにより、下り勾配にて得られる見込みのエネルギを消費しておくことで、効果的に燃費の向上を達成することが可能となる。
【0068】
前記無段変速機の変速比ipを、ip=1近傍の制御に移行するための判断条件を整理すると、
(a) ASCDやACC等により定速走行モードが設定され、ドライバがアクセルから足を離していること。
(b) ナビゲーションシステム等にからの勾配情報から推測される制御のエネルギ収支が通常制御よりも小であること。
(c) 制御中に走行路が変わらないこと。すなわち、ip=1近傍制御を実施する区間に分岐がないこと。
等が挙げられる。
【0069】
一般に、変速状態にある無段変速機では、伝達トルクが一定であっても変速比一定の状態よりもプーリに印加する推力が大となる。理由としては、変速のためにプライマリプーリとセカンダリプーリの何れかに変速比一定の状態よりも大きな推力を与える必要があるからである。他方のプーリにもトルク伝達を行うための推力の印加が必要となる。このため、ライン圧は、それぞれのプーリに必要となる油圧を供給可能とするだけの仕事をすることとなり、結果として、変速時にはオイルポンプの負荷が増大することとなる。
【0070】
前記無段変速機の変速比ipを、ip=1近傍の制御に移行するための判断条件の一つである制御によるエネルギ収支が、通常制御のエネルギよりも小であるということは、言い換えると、ip=1近傍の制御のために必要となる変速に要するオイルポンプの仕事量(通常制御に復帰する際の仕事量も含む)よりも、ip=1近傍の制御中に対通常制御に節約することのできるオイルポンプの仕事量が大となるということである。
【0071】
前記無段変速機の変速比ipを、ip=1近傍の制御を実施可能な走行状態は、車両諸元や性能により制限されることとなる。例えば、ファイナルギヤ比によりip=1の際のエンジン回転数はロックアップを前提として一義的に決定される。よって、音振性能を考慮すると、制御中のエンジン回転数は、一般的に3000rpm程度を上限に設計すべきである。その結果、当該制御を実施する車速は制限されることになり実際の走行条件によっては有効に慣性エネルギを回生可能なシーンは限られることとなる。
【0072】
しかしながら、現在、副変速機を持つCVTユニットである副変速機付き無段変速機が増えつつある。副変速機付き無段変速機では、ある車速においてロックアップを前提としたエンジン回転数は2つ以上選択することができ、当該制御を実施可能なシーンは2倍以上に拡大されることとなり、同制御によるエネルギ回生を更に有効に実施することが可能となる。
【0073】
[コースト定速走行時の回生発電制御作用]
上記のように、降坂路でのコースト定速走行時、所定の条件が成立すると、ip=1近傍制御に移行し、ライン圧PLを低下させた上で、回生発電制御を実施する。以下、図4に基づき、これを反映するコースト定速走行時の回生発電制御作用を説明する。
【0074】
まず、ACC等の定速走行制御中であって、A−B<C、または、制御開始距離に未達の場合には、図4のフローチャートにおいて、ステップS1→ステップS2→ステップS3→ステップS4→ステップS8へと進む流れが繰り返される。すなわち、通常のACC等による定速走行制御が実施されると共に、現在のアクセル開度APOと車速VSPより最適な変速比を得る変速比制御による通常制御処理が実施される。但し、常にステップS4でのエネルギ回収のための判断は繰り返えされる。
【0075】
そして、ACC等の定速走行制御中であって、A−B≧C、かつ、制御開始距離に到達という条件が成立すると、図4のフローチャートにおいて、ステップS4からステップS5→ステップS6へと進む。そして、ステップS6にて終了制御開始距離に到達したと判断されるまで、ステップS5→ステップS6へと進む流れが繰り返され、ステップS5にてip=1近傍制御が実施される(図5のフローチャート)。このip=1近傍制御の実施によりライン圧PLを下げた上でモータ/ジェネレータMGにより回生発電が行われる。
【0076】
そして、ステップS6にて終了制御開始距離に到達したと判断されると、図4のフローチャートにおいて、ステップS6からステップS7→ステップS8へと進み、ステップS1へ戻る。つまり、ステップS7にて通常制御移行処理が行われ、ステップS8にてip=1近傍制御から通常制御処理に復帰する。
【0077】
上記のように、実施例1では、アクセルオフ操作によるコースト走行時に、ip=1近傍制御の実施により、副変速機付き無段変速機CVTへの変速油圧の元圧であるライン圧PLを低下させた上で回生発電を行う構成を採用した。
このように、回生発電を行うとき、ip=1近傍制御によりライン圧PLを低下させることで、ライン圧PLを作り出すメインオイルポンプM-O/PやサブオイルポンプS-O/Pによるポンプ負荷が低減される。そして、ライン圧PLが低下することによりベルト式無段変速機構34のプーリ推力(=ベルトクランプ力)が低下し、図6の矢印に示すように、ベルト巻き付け径を同径とするip=1に向かって変速比が移行する。そして、ip=1に向かっての変速比移行に伴い、図7に示すように、副変速機付き無段変速機CVTでのフリクショントルクが低減される。このため、ポンプ負荷低減分とフリクショントルク低減分を、回生電力としてバッテリ4に蓄積することができ、燃費が向上する。
したがって、降坂路でのコースト定速走行時に回生発電を行うとき、車両トータルとしてのエネルギ回収率の改善が図られる。
【0078】
実施例1では、アクセルオフ操作によるコースト走行時に回生発電を行うとき、ライン圧PLを低下させるために、ip=1近傍制御を実施するようにした。
したがって、降坂路でのコースト定速走行時に回生発電を行うとき、ip=1近傍制御の実施により、図7に示すように、CVTフリクショントルクを最大限まで低減させることができるというように、車両トータルとしてのエネルギ回収率の高い改善代が確保される。
【0079】
実施例1では、前方道路の路面勾配が下り勾配であるとき、車両が降坂路にさしかかる前の制御開始距離に到達すると(ステップS4でYES)、ip=1近傍制御を開始する(ステップS5)。つまり、降坂路が近づいたと判断される場合に、降坂路にさしかかる前に副変速機付き無段変速機CVTへのライン圧PLを下げる構成を採用した。
この構成により、降坂路に到達する前の変速比から変速比ip=1に移行するまでに時間がかかる場合であっても、降坂路への到達に先行して変速比ip=1への移行を終えることができる。
したがって、降坂路でのコースト定速走行時に回生発電を行うとき、降坂路に到達するまでに副変速機付き無段変速機CVTへのライン圧PLを下げることで、降坂路に到達してからの回生発電量がより拡大される。
【0080】
実施例1では、車両が降坂路を終了する前の終了制御開始距離に到達すると(ステップS6でYES)、ip=1近傍制御から通常制御へ移行する(ステップS7)。つまり、降坂路が終了すると判断される場合に、降坂路が終了する前に通常の変速比制御に戻しておく構成を採用した。
したがって、降坂路でのコースト定速走行時に回生発電を行うとき、降坂路が終了する前に変速比を元に戻しておくことで、平坦路走行時に変速することで発生する違和感が防止される。
【0081】
実施例1では、ip=1近傍制御を実施しないときの仕事量A(損失分)と、ip=1近傍制御を実施した場合の仕事量B(損失分)を演算し、仕事量Aと仕事量Bの差分が設定値C以上であると(ステップS4でYES)、ip=1近傍制御を開始する(ステップS5)。つまり、ライン圧PLを低下させる制御に必要なエネルギよりも、ライン圧PLを低下させることで増加する回生エネルギが大きいと判断される場合に、副変速機付き無段変速機CVTのライン圧PLを下げる制御を行う構成を採用した。
したがって、不用意に変速比ipを1とするip=1近傍制御に入ることで、むしろ燃費悪化を招くことが防止される。
【0082】
実施例1では、無段変速機を、変速比幅を拡大した副変速機付き無段変速機CVTとする構成を採用した。
したがって、降坂路でのコースト定速走行時に回生発電を行うとき、副変速機付き無段変速機CVTへのライン圧PLを低下させる制御を実施可能な走行状態が増加することで、より燃費を向上させる頻度が高められる。
【0083】
[コースト定速走行時のip=1近傍制御作用]
上記のように、コースト定速走行時に回生発電制御を行うとき、ライン圧PLを低下させるためにip=1近傍制御を用いた。よって、ip=1近傍制御に移行した後、走行路勾配の変化による減速度の違和感を与えない工夫が必要である。以下、図5に基づき、これを反映するコースト定速走行時のip=1近傍制御作用を説明する。
【0084】
まず、変速比条件(ステップS52)・目標スロットル開度条件(ステップS54)・目標減速度条件(ステップS56)が成立していない状態から、ip=1近傍制御処理が開始されると、図5のフローチャートにおいて、ステップS51→ステップS52→ステップS53へと進む。ステップS53では、そのときの副変速機付き無段変速機CVTの変速比ipを、徐々にip=1に近づけていく変速比制御(副変速機構35の制御を含む)が行われる。
【0085】
そして、ステップS53からステップS54→ステップS55へと進み、ステップS55では、電子スロットルを制御することにより、実スロットル開度を目標スロットル開度に近づける制御が実施される。
【0086】
さらに、ステップS55からステップS56→ステップS57へと進み、ステップS57では、ゲイン小によるスロットル開度制御と変速比制御の少なくとも一方の制御により、減速度の補正が行われる。
【0087】
上記ステップS51→ステップS52→ステップS53→ステップS54→ステップS55→ステップS56→ステップS57へと進む流れを繰り返すことで、変速比条件(ステップS52)・目標スロットル開度条件(ステップS54)・目標減速度条件(ステップS56)が成立する。これら3条件が成立すると、図5のフローチャートにおいて、ステップS51→ステップS52→ステップS54→ステップS56へと進む流れが繰り返えされる。つまり、終了制御開始距離の判定(ステップS6)の条件が成立するまで、変速比ip=1±α、実スロットル開度=目標スロットル開度±β、実減速度=目標減速度±γによるip=1近傍制御処理が維持される。
【0088】
その後、走行路勾配の変化により目標減速度が変わると、ステップS51→ステップS52→ステップS54→ステップS56→ステップS57へと進む流れを繰り返す。つまり、ステップS57において、ゲイン小によるスロットル開度制御と変速比制御の少なくとも一方の制御により、減速度の補償が行われる。
【0089】
実施例1では、ライン圧PLを低下させるip=1近傍制御を行う際、目標減速度を演算し(ステップS51)、目標減速度と実減速度の差を、エンジンEngのスロットル開度を制御することで補償する構成を採用した(ステップS57)。
この構成により、ライン圧PLを低下させるip=1近傍制御を実行することで、ip=1近傍制御への移行後、走行路勾配に微小な変化があったとしても、エンジン負荷を変えるスロットル開度制御により柔軟に対応して目標減速度に近い実減速度が保たれる。
したがって、降坂路でのコースト定速走行時に回生発電を行うとき、回生発電中の走行路勾配の変化にかかわらず、スロットル開度制御により目標減速度を保つことで、ドライバに与える減速違和感が防止される。
【0090】
[コースト定速走行時の燃費向上作用]
上記のように、降坂路でのコースト定速走行時、回生発電を行うのは、エンジンEngによる駆動分担を減少し、燃費を向上させるたである。以下、図8に示すタームチャートに基づき、これを反映するコースト定速走行時の燃費向上作用を説明する。
【0091】
制御開始距離に到達する時刻t1までは、平坦路でのコースト定速走行中であり、ライン圧PLは、図8のDに示すように、定常ライン圧であり、変速比ipは、図8のD’に示すように、オーバードライブ変速比である。平坦路でのコースト定速走行中のライン圧PLと変速比ipを、図6で示すと、例えば、ライン圧PL=D、変速比ip=D’である。
【0092】
制御開始距離に到達する時刻t1から時刻t2までは、副変速比変更を含んで変速比制御が行われると共に、スロットル開度を徐々に開き、回生発電量を徐々に増やす回生発電制御が行われる。時刻t1から時刻t2までは、変速比ipを、オーバードライブ変速比(OD)からip=1に向かって変速する変速過渡期であるため、ライン圧PLは、図8のEに示すように、通常より油圧が上がり、変速比ipは、図8のE’に示すように、変速比ipが、オーバードライブ変速比から徐々に変速比1へ移行する。このip=1近傍制御の開始域におけるライン圧PLと変速比ipの変化を、図6で示すと、例えば、矢印Eである。
【0093】
変速比ipがip=1±αに到達する時刻t2から時刻t3までは、下り勾配Δ%以上(エンブレ可の区間)であり、変速比ipがip≒1(ライン圧PLは最小圧)が維持されると共に、目標スロットル開度により回生発電量を最適化させての回生発電制御が行われる。時刻t2から時刻t3までの区間は、変速比ipを、図8のF’に示すように、ip≒1に維持する区間であるため、ライン圧PLは、図8のFに示すように、ポンプ損失やフリクション損失が最小の油圧が維持される。このip=1近傍制御域におけるライン圧PLと変速比ipを、図6で示すと、例えば、ライン圧PL=F、変速比ip=F’である。
【0094】
終了制御開始距離に到達する時刻t3から時刻t4までは、副変速比変更を含んで変速比制御が行われると共に、スロットル開度を徐々に閉じ、回生発電量を徐々に減らす回生発電制御が行われる。時刻t3から時刻t4までは、変速比ipを、ip≒1からオーバードライブ変速比(OD)に向かって変速する変速過渡期であるため、ライン圧PLは、図8のGに示すように、通常より油圧が上がり、変速比ipは、図8のG’に示すように、変速比ipが、変速比1からオーバードライブ変速比へ徐々に移行する。このip=1近傍制御の終了域におけるライン圧PLと変速比ipの変化を、図6で示すと、例えば、矢印Gである。
【0095】
オーバードライブ変速比(OD)に到達する時刻t4からは、平坦路(勾配=0%)でのコースト定速走行中に復帰するため、ライン圧PLは、図8のHに示すように、定常ライン圧であり、変速比ipは、図8のH’に示すように、オーバードライブ変速比である。平坦路でのコースト定速走行制御へ復帰するときのライン圧PLと変速比ipを、図6で示すと、例えば、ライン圧PL=H、変速比ip=H’である。
【0096】
上記のように、実施例1では、降坂路でのコースト定速走行時、時刻t2から時刻t3までの区間において、変速比ipをp≒1に維持し、ライン圧PLを損失が最小となる油圧に維持する。したがって、時刻t2から時刻t3までの下り勾配をコースト走行する区間において、回生発電量が最大化される。
【0097】
加えて、時刻t1から時刻t2までの区間では、副変速比変更を含んで変速比制御が行われると共に、スロットル開度を徐々に開き、回生発電量を徐々に増やす回生発電制御が行われる。したがって、変速比制御とスロットル開度を併用しながら、回生発電制御による回生発電量を増大させることで、違和感なくスムーズに最大化した回生発電域に移行することができる。
【0098】
さらに、時刻t3から時刻t4までの区間では、副変速比変更を含んで変速比制御が行われると共に、スロットル開度を徐々に閉じ、回生発電量を徐々に減らす回生発電制御が行われる。したがって、変速比制御とスロットル開度を併用しながら、回生発電制御による回生発電量を減少させることで、違和感なくスムーズに回生発電をしないコースト定速走行に移行することができる。
【0099】
次に、効果を説明する。
実施例1のハイブリッド車両の回生発電制御装置にあっては、下記に列挙する効果を得ることができる。
【0100】
(1) 駆動輪(左右タイヤLT,RT)に対して動力を伝達する無段変速機(副変速機付き無段変速機CVT)と、
動力伝達経路からの動力により発電を行う発電機(モータ/ジェネレータMG)と、
アクセルオフ操作によるコースト走行時に、前記無段変速機(副変速機付き無段変速機CVT)への変速油圧の元圧であるライン圧PLを低下させた上で回生発電を行う回生発電制御手段(図4,図5)と、
を備える。
このため、アクセルオフ操作によるコースト走行時、車両トータルとしてのエネルギ回収率の改善を図ることができる。
【0101】
(2) 車両が走行している道路状況を検出する道路状況検出手段(ナビゲーションコントローラ23)と、を備え、
前記回生発電制御手段(図4,図5)は、前記道路状況検出手段(ナビゲーションコントローラ23)により所定の降坂路が近づいたと判断される場合に、車両が降坂路にさしかかる前に、ライン圧PLの低下制御を開始する(ステップS4→ステップS5)。
このため、(1)の効果に加え、降坂路でのコースト定速走行時に回生発電を行うとき、降坂路に到達するまでに無段変速機(副変速機付き無段変速機CVT)へのライン圧PLを下げることで、降坂路に到達してからの回生発電量をより拡大することができる。
【0102】
(3) 前記回生発電制御手段(図4,図5)は、前記道路状況検出手段(ナビゲーションコントローラ23)により所定の降坂路が終了すると判断される場合に、降坂路が終了する前に、前記無段変速機(副変速機付き無段変速機CVT)の変速比制御を、アクセル開度APOと車速VSPにより目標変速比を決める通常の変速比制御に戻しておく(ステップS6→ステップS7)。
このため、(2)の効果に加え、降坂路でのコースト定速走行時に回生発電を行うとき、降坂路が終了する前に変速比を元に戻しておくことで、平坦路走行時に復帰した後で変速することにより発生する違和感を防止することができる。
【0103】
(4) 前記ライン圧PLを低下させるのに必要なエネルギと、前記ライン圧PLを低下させることで増加する回生エネルギと、を演算するエネルギ収支演算手段(ステップS2,S3,S4)と、を備え、
前記回生発電制御手段(図4,図5)は、前記道路状況検出手段(ナビゲーションコントローラ23)により検出された降坂路に車両が近づく前に、ライン圧PLを低下させるのに必要なエネルギよりも、ライン圧PLを低下させることで増加する回生エネルギが大きいと判断される場合に、前記無段変速機(副変速機付き無段変速機CVT)へのライン圧PLを低下させる制御を行う(ステップS4→ステップS5)。
このため、(2)または(3)の効果に加え、ライン圧PLを低下するとエネルギ収支がマイナスとなる場合、不用意にライン圧PLを低下させる制御に入ることで燃費悪化を招くことを防止することができる。
【0104】
(5) 前記回生発電制御手段(図4,図5)は、前記無段変速機(副変速機付き無段変速機CVT)の目標変速比を1近傍の値とする変速比制御によりライン圧PLを低下させる(ステップS5,図5)。
このため、(1)〜(4)の効果に加え、降坂路でのコースト定速走行時に回生発電を行うとき、ip=1近傍制御の実施により、CVTフリクショントルクを最大限まで低減させることが可能であり、車両トータルとしてのエネルギ回収率の高い改善代を確保することができる。
【0105】
(6) 前記無段変速機は、無段変速機構(ベルト式無段変速機構34)に副変速機構35を組み合わせた副変速機付き無段変速機CVTである。
このため、(1)〜(5)の効果に加え、降坂路でのコースト定速走行時に回生発電を行うとき、副変速機付き無段変速機CVTへのライン圧PLを低下させる制御を実施可能な走行状態が増加することで、より燃費を向上させる頻度を高めることができる。
【0106】
(7) 前記動力伝達経路にエンジンEngを備え、
前記回生発電制御手段(図4,図5)は、ライン圧PLを低下させる変速比制御を行う際、目標減速度を演算する目標減速度演算部(ステップS51)と、前記目標減速度と実減速度の差を、前記エンジンEngのスロットル開度を制御することで補償する減速度補償制御部(ステップS57)と、を有する。
このため、(1)〜(6)の効果に加え、降坂路でのコースト定速走行時に回生発電を行うとき、回生発電中の走行路勾配の変化にかかわらず、スロットル開度制御により目標減速度を保つことで、ドライバに与える減速違和感を防止することができる。
【0107】
以上、本発明の車両の回生発電制御装置を実施例1に基づき説明してきたが、具体的な構成については、この実施例1に限られるものではなく、特許請求の範囲の各請求項に係る発明の要旨を逸脱しない限り、設計の変更や追加等は許容される。
【0108】
実施例1では、回生発電制御手段として、ASCDやACC等の定速走行制御を選択してのアクセルオフ操作によるコースト定速走行時に、ライン圧PLを下げた上で、所定の減速走行を保ちながら回生発電する例を示した。しかし、ASCDやACC等の定速走行制御システムが搭載されていない車両において、下り勾配等においてアクセルオフ操作による通常のコースト走行を行う時にも適用することができる。さらに、減速走行時に限らず、下り勾配の一定速走行時も回生発電可能な走行モードであるため、これらのアクセルオフ操作によるコースト走行時には、本発明の回生発電制御を適用することができる。
【0109】
実施例1では、回生発電制御手段の協調制御として、ip=1近傍制御(変速比制御)を実施することで、ライン圧PLを低下させる例を示した。しかし、回生発電制御手段の協調制御としては、変速比制御は通常制御のままで、ライン圧PLを低下させるライン圧制御を行うような例としても良い。さらに、変速比制御とライン圧制御を併用する例であっても良い。要するに、アクセルオフ操作によるコースト走行時に回生発電を行うにあたって、無段変速機への変速油圧の元圧であるライン圧を低下させる協調制御を実行すれば良い。
【0110】
実施例1では、発電機として、ハイブリッド車両の副変速機付き無段変速機CVTに接続するモータ/ジェネレータMGを用いる例を示した。しかし、発電機としては、コンベ車両のエンジンに接続するオルタネータも含む。また、無段変速機としては、副変速機無しのベルト式無段変速機、等を用いるものであっても良い。
【0111】
実施例1では、本発明の回生発電制御装置をハイブリッド車両に適用する例を示した。しかし、本発明の回生発電制御装置は、電動機を持たないガソリンエンジン車(ICE車両)、更に、電動機のみを持つ電気自動車に適用することができる。
【0112】
電動機を持たないガソリンエンジン車の場合は、ハイブリッド車と同様に燃費を向上させることができる。加えて、例えば、下り勾配の前では一時的オルタネータの負荷を減少させ、積極的にバッテリ電力をエアコン等の電気を消費する部位にて使用し、下り勾配では、オルタネータの負荷を上げ充電を実施する。通常のバッテリのみでなく、交流抵抗の低い大容量のキャパシタ等を使用すると、さらにエネルギ回生率が向上する。
【0113】
電動機のみを持つ電気自動車の場合は、実施例1で述べたようなエネルギマネージメントが更に重要となり、エネルギマネージメントに基づく制御により回生発電量を増大させることで、バッテリへの1回充電による走行可能距離を延ばす、つまり、電費を向上させることができる。
【符号の説明】
【0114】
Eng エンジン
MG モータ/ジェネレータ(発電機)
M-O/P メインオイルポンプ
S-O/P サブオイルポンプ
CVT 副変速機付き無段変速機(無段変速機)
IN 変速機入力軸
OUT 変速機出力軸
LT 左タイヤ(駆動輪)
RT 右タイヤ(駆動輪)
1 エンジンコントローラ
2 モータコントローラ
7 CVTコントローラ
10 統合コントローラ
23 ナビゲーションコントローラ(道路状況検出手段)
24 定速走行制御コントローラ
【技術分野】
【0001】
本発明は、降坂路等でのアクセルオフ操作によるコースト走行時(=慣性走行時)、回生発電制御を行う車両の回生発電制御装置に関する。
【背景技術】
【0002】
ナビゲーション装置などの道路状況検出手段によって車両前方に降坂路が検出された場合に、発電機による発電効率を高くする車両用制御装置が開示されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−217203号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の車両用制御装置にあっては、降坂路において発電効率を高くする際に、無段変速機の変速比をロー側に大きくし、コースト状態での変速機入力回転数を増大するようにしている。このように、変速比をロー側に移行させる変速比制御を行うため、ライン圧を高める必要があり、ライン圧を作り出すオイルポンプの負荷が大きくなるし、無段変速機のフリクショントルクが大きくなる。このため、発電エネルギを回収するために余分に使われるエネルギ損失を考慮した場合、車両トータルとしてのエネルギ回収率が改善されない、という問題があった。
【0005】
本発明は、上記問題に着目してなされたもので、アクセルオフ操作によるコースト走行時、車両トータルとしてのエネルギ回収率の改善を図ることができる車両の回生発電制御装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するため、本発明の車両の回生発電制御装置は、無段変速機と、発電機と、回生発電制御手段と、を備える手段とした。
前記無段変速機は、駆動輪に対して動力を伝達する。
前記発電機は、動力伝達経路からの動力により発電を行う。
前記回生発電制御手段は、アクセルオフ操作によるコースト走行時に、前記無段変速機への変速油圧の元圧であるライン圧を低下させた上で回生発電を行う。
【発明の効果】
【0007】
よって、アクセルオフ操作によるコースト走行時に、回生発電制御手段において、無段変速機への変速油圧の元圧であるライン圧を低下させた上で回生発電が行われる。
すなわち、回生発電を行うとき、ライン圧を低下させることで、ライン圧を作り出すオイルポンプの負荷が低減される。このため、ポンプ負荷低減分を、回生電力としてバッテリに蓄積することができ、燃費や電費が向上する。
この結果、アクセルオフ操作によるコースト走行時、車両トータルとしてのエネルギ回収率の改善を図ることができる。
【図面の簡単な説明】
【0008】
【図1】実施例1の回生発電制御装置が適用された前輪駆動または後輪駆動によるハイブリッド車両を示す全体システム図である。
【図2】実施例1の回生発電制御装置が適用されたハイブリッド車両の駆動系に有する副変速機付き無段変速機を示す概略図である。
【図3】実施例1の回生発電制御装置が適用されたハイブリッド車両の駆動系に有する副変速機付き無段変速機における車速とアクセル開度とプライマリ回転数の関係の一例を示す変速線図である。
【図4】実施例1の統合コントローラにて実行される回生発電制御処理を示すメインルーチンフローチャートである。
【図5】実施例1の統合コントローラにて実行される回生発電制御処理のうちip=1近傍制御処理を示すサブルーチンフローチャートである。
【図6】ベルト式無段変速機構において変速比ipに対するプライマリプーリ圧Ppriとセカンダリプーリ圧Psecとライン圧PLの関係を示す変速油圧特性図である。
【図7】ベルト式無段変速機構において入力回転数をパラメータとし変速比ipに対するCVTフリクショントルクの関係を示すフリクショントルク特性図である。
【図8】実施例1のip=1近傍制御を伴う回生発電制御が行われる降坂路でのコースト定速走行時におけるライン圧・変速比の各特性を示すタイムチャートである。
【発明を実施するための形態】
【0009】
以下、本発明の車両の回生発電制御装置を実現する最良の形態を、図面に示す実施例1に基づいて説明する。
【実施例1】
【0010】
まず、構成を説明する。
実施例1の車両の回生発電制御装置の構成を、「全体システム構成」、「副変速機付き無段変速機構成」、「回生発電制御構成」に分けて説明する。
【0011】
[全体システム構成]
図1は、実施例1の回生発電制御装置が適用された前輪駆動または後輪駆動によるハイブリッド車両を示す全体システム図である。
【0012】
ハイブリッド車両の動力伝達経路には、図1に示すように、エンジンEngと、フライホイールFWと、第1クラッチCL1と、モータ/ジェネレータMG(発電機)と、メインオイルポンプM-O/Pと、サブオイルポンプS-O/Pと、第2クラッチCL2と、副変速機付き無段変速機CVT(無段変速機)と、変速機入力軸INと、変速機出力軸OUTと、を備える。そして、変速機出力軸OUTの下流側には、ディファレンシャルDFと、左ドライブシャフトDSLと、右ドライブシャフトDSRと、左タイヤLT(駆動輪)と、右タイヤRT(駆動輪)と、を有する。
【0013】
前記エンジンEngは、ガソリンエンジンやディーゼルエンジンであり、エンジンコントローラ1からのエンジン制御指令に基づいて、エンジン始動制御やエンジン停止制御やスロットルバルブのバルブ開度制御や燃料カット制御、等が行われる。なお、エンジン出力軸には、フライホイールFWが設けられている。
【0014】
前記第1クラッチCL1は、エンジンEngとモータ/ジェネレータMGの間に介装されたクラッチである。第1クラッチコントローラ5からの第1クラッチ制御指令に基づき第1クラッチ油圧ユニット6により作り出された第1クラッチ制御油圧により、締結・半締結状態・解放が制御される。
【0015】
前記モータ/ジェネレータMGは、ロータに永久磁石を埋設しステータにステータコイルが巻き付けられた同期型モータ/ジェネレータである。モータコントローラ2からの制御指令に基づいて、インバータ3により作り出された三相交流を印加することにより制御される。モータ/ジェネレータMGは、バッテリ4からの電力の供給を受けて回転駆動する電動機として動作することができる(力行)。また、モータ/ジェネレータMGのロータがエンジンEngや駆動輪から回転エネルギを受ける場合には、ステータコイルの両端に起電力を生じさせる発電機として機能し、バッテリ4を充電することができる(回生)。
【0016】
前記メインオイルポンプM-O/Pは、モータ/ジェネレータMGのモータ軸MSにより駆動される。メインオイルポンプM-O/Pは、副変速機付き無段変速機CVTに付設される油圧コントロールバルブユニットCVU(第1クラッチ油圧ユニット6、第2クラッチ油圧ユニット8を含む)に対する油圧源とされる。そして、停車時等のように、メインオイルポンプM-O/Pからの吐出圧が見込めないときや不足するときのため、メインオイルポンプM-O/Pとは別に、電動モータにより駆動されるサブオイルポンプS-O/Pが設けられる。
【0017】
前記第2クラッチCL2は、モータ/ジェネレータMGと左右タイヤLT,RTの間のうち、モータ軸MSと変速機入力軸INの間に介装されたクラッチである。第2クラッチCL2は、CVTコントローラ7からの第2クラッチ制御指令に基づき、第2クラッチ油圧ユニット8により作り出された制御油圧により、締結・スリップ締結・解放が制御される。
【0018】
前記副変速機付き無段変速機CVTは、第2クラッチCL2の下流位置に配置され、車速VSPやアクセル開度APOに応じて目標入力回転数を決め、無段階による変速比を自動的に変更する。副変速機付き無段変速機CVTは、無段変速比を得るベルト式無段変速機構34に、2段階の変速段を持つ副変速機構35を組み合わせて構成され、プーリを小型化しながら、変速比幅の拡大を実現するものである。これにより、発進時や低速時におけるレスポンスン向上と、高速走行時における変速機入力回転数の低回転化を両立し、燃費や電費の向上を目指している。
【0019】
前記変速機出力軸OUTには、図外の終減速機構を介してディファレンシャルDFが連結され、ディファレンシャルDFから、左ドライブシャフトDSLと右ドライブシャフトDSRを介してそれぞれに左右タイヤLT,RTが設けられている。
【0020】
前記ハイブリッド車両は、駆動形態の違いによる走行モードとして、電気自動車走行モード(以下、「EVモード」という。)と、ハイブリッド車走行モード(以下、「HEVモード」という。)と、駆動トルクコントロール走行モード(以下、「WSCモード」という。なお、WSCは、「Wet Start Clutch」の略である。)と、を有する。
【0021】
前記「EVモード」は、第1クラッチCL1を解放状態とし、モータ/ジェネレータMGを駆動源として走行するモードであり、モータ走行モード・回生走行モードを有し、何れかのモードにより走行する。この「EVモード」は、要求駆動力が低く、バッテリSOCが確保されているときに選択される。
【0022】
前記「HEVモード」は、第1クラッチCL1を締結状態とし、エンジンEngとモータ/ジェネレータMGを駆動源として走行するモードであり、モータアシスト走行モード・発電走行モード・エンジン走行モードを有し、何れかのモードにより走行する。この「HEVモード」は、要求駆動力が高いとき、あるいは、バッテリSOCが不足するようなときに選択される。
【0023】
前記「WSCモード」は、モータ/ジェネレータMGの回転数制御とクラッチ油圧制御により、第2クラッチCL2をスリップ締結状態に維持し、第2クラッチCL2を経過するクラッチ伝達トルクが、車両状態やドライバ操作に応じて決まる要求駆動トルクとなるようにクラッチトルク容量をコントロールするモードである。この「WSCモード」は、「HEVモード」の選択状態での停車時・発進時等のように、エンジン回転数がアイドル回転数を下回るような走行領域やポンプ吐出油が不足するような領域において選択される。
【0024】
次に、ハイブリッド車両の制御系を説明する。
ハイブリッド車両の制御系は、図1に示すように、エンジンコントローラ1と、モータコントローラ2と、第1クラッチコントローラ5と、CVTコントローラ7と、ブレーキコントローラ9と、ナビゲーションコントローラ23と、定速走行制御コントローラ24と、統合コントローラ10と、を有して構成されている。なお、各コントローラ1,2,5,7,9,23,24と、統合コントローラ10とは、情報交換が互いに可能なCAN通信線11を介して接続されている。
【0025】
前記エンジンコントローラ1は、エンジン回転数センサ12からのエンジン回転数情報と、統合コントローラ10からの目標エンジントルク指令と、他の必要情報を入力する。そして、エンジン動作点(Ne,Te)を制御する指令を、エンジンEngのスロットルバルブアクチュエータ等へ出力する。
【0026】
前記モータコントローラ2は、モータ/ジェネレータMGのロータ回転位置を検出するレゾルバ13からの情報と、統合コントローラ10からの目標MGトルク指令および目標MG回転数指令と、他の必要情報を入力する。そして、モータ/ジェネレータMGのモータ動作点(Nm,Tm)を制御する指令をインバータ3へ出力する。なお、モータコントローラ2は、モータトルクを目標トルクとし、回転数を駆動系の回転に追従させるトルク制御を基本制御とする。しかし、第2クラッチCL2のスリップ制御時、等においては、モータ回転数を目標回転数とし、トルクを駆動系負荷に追従させる回転数制御を行う。また、モータコントローラ2は、バッテリ4の充電容量をあらわすバッテリSOCを監視していて、バッテリSOC情報を、CAN通信線11を介して統合コントローラ10へ供給する。
【0027】
前記第1クラッチコントローラ5は、油圧アクチュエータ14のピストン14aのストローク位置を検出する第1クラッチストロークセンサ15からのセンサ情報と、統合コントローラ10からの目標CL1トルク指令と、他の必要情報を入力する。そして、第1クラッチCL1の締結・半締結・解放を制御する指令を油圧コントロールバルブユニットCVU内の第1クラッチ油圧ユニット6に出力する。
【0028】
前記CVTコントローラ7は、アクセル開度センサ16と、車速センサ17と、他のセンサ類18等からの情報を入力する。そして、Dレンジを選択しての走行時、アクセル開度APOと車速VSPにより決まる目標入力回転数をシフトマップにより検索し、検索された目標入力回転数(変速比)を得る制御指令を油圧コントロールバルブユニットCVUに出力する。この変速比制御に加え、制御油圧の元圧であるライン圧PLを制御するライン圧制御を行う。ライン圧制御は、プライマリプーリ圧Ppri、セカンダリプーリ圧Psec、ローブレーキ圧、ハイクラッチ圧、リバースブレーキ圧の必要油圧のうち、最大圧を目標ライン圧とし、ライン圧制御指令を決める。そして、ライン圧制御指令を、油圧コントロールバルブユニットCVUに設けた図外のライン圧ソレノイドに出力することで行う。
【0029】
前記ブレーキコントローラ9は、4輪の各車輪速を検出する車輪速センサ19と、ブレーキストロークセンサ20からのセンサ情報と、統合コントローラ10からの回生協調制御指令と、他の必要情報を入力する。そして、例えば、ブレーキ踏み込み制動時、ブレーキストロークBSから求められる要求制動力に対し回生制動力だけでは不足する場合、その不足分を機械制動力(液圧制動力やモータ制動力)で補うように、回生協調ブレーキ制御を行う。
【0030】
前記ナビゲーションコントローラ23は、車両の道順案内等を行いドライバの運転を支援する車載システムの中枢となるコントローラである。すなわち、GPS衛星を利用して現在位置を自動的に割り出し、システムに記録された地図と照らし合わせることでドライバの運転を支援する他、無線通信を行い、天候・道路状況等の情報提供を行う。ここでは、自車の走行が予定される前方道路の路面勾配情報(平坦路、下り勾配路、上り勾配路)を統合コントローラ10に提供する。
【0031】
前記定速走行制御コントローラ24は、路面勾配等による走行負荷変動にかかわらず、ドライバが設定した設定車速を保ちながら車両を走行させる制御を行うコントローラである。一般に、ASCD(Auto Speed Control Deviceの略称)やACC(Adaptive Cruise Control Systemの略称)等と呼ばれるシステムが代表的であり、ドライバが、ASCDやACC等による定速走行制御を選択すると、定速走行制御選択情報を統合コントローラ10に提供する。
【0032】
前記統合コントローラ10は、車両全体の消費エネルギを管理し、最高効率で車両を走らせるための機能を担うものである。この統合コントローラ10には、モータ回転数Nmを検出するモータ回転数センサ21や他のセンサ・スイッチ類22からの必要情報がCAN通信線11を介して入力される。加えて、ナビゲーションコントローラ23からの路面勾配情報や定速走行制御コントローラ24からの定速走行制御選択情報が入力される。そして、アクセルオフによる定速走行制御での走行中に降坂路に入ったら、下り勾配による走行負荷の低減分を発電負荷として与えるように統合コントローラ10からモータコントローラ2へ回生発電指令が出力される。そして、この回生発電制御の際には、同時に、統合コントローラ10からCVTコントローラ7に対し、変速比ipを1の近傍とするip=1近傍制御が実行される。
【0033】
[副変速機付き無段変速機構成]
図2は、副変速機付き無段変速機の概略構成を示し、図3は、副変速機付き無段変速機の変速線図を示す。以下、図2及び図3に基づいて、副変速機付き無段変速機CVTの構成を説明する。
【0034】
前記副変速機付き無段変速機CVTは、図2に示すように、ベルト式無段変速機構34に副変速機構35を組み合わせて構成される。
【0035】
前記ベルト式無段変速機構34は、変速機入力軸INに設けられたプライマリプーリ34aと、セカンダリプーリ軸36に設けられたセカンダリプーリ34bと、両プーリ34a,34bに掛け渡されたベルト34cを主要構成とする。そして、ポンプ吐出圧を元圧とし、図外のプレッシャレギュレータバルブにより作り出されたライン圧PLに基づき、プライマリプーリ圧Ppriとセカンダリプーリ圧Psecを作り出す。両プーリ圧Ppri,Psecによるプーリ推力を、プライマリプーリ34aの可動プーリとセカンダリプーリ34bの可動プーリに作用させ、両可動プーリを軸方向に動かし、ベルト34cへのプーリ接触径を変化させることで、変速比ipを無段階に変更する(図7参照)。
【0036】
前記副変速機構35は、前進走行段として、低速モードと高速モードを有し、後退走行段として、後退モードを有し、これらのモードを運転状態に応じて切り換える変速機構である。副変速機構35は、ラビニヨー型遊星歯車と変速用の摩擦締結要素により構成される。ラビニヨー型遊星歯車は、ダブルピニオン遊星歯車(S-Fr、P1、P2、R)とシングルピニオン遊星歯車(S-Rr、P1、R)を組み合わせた構成である。つまり、セカンダリプーリ軸26に設けられ、第1ピニオンP1に噛み合うフロントサンギアS-Frと、第2ピニオンP2に噛み合うリヤサンギアS-Rrと、変速機出力軸OUTに直結された共通キャリアCと、第2ピニオンP2に噛み合うリングギアRと、による4つの回転要素を有する。変速用の摩擦要素としては、低速モードの選択時に締結され、リヤサンギアS-Rrをケース固定可能なローブレーキL/Bと、高速モードの選択時に締結され、共通キャリアCとリングギアRを連結可能なハイクラッチH/Cと、後退モードの選択時に締結され、リングギアRをケース固定可能なリバースブレーキR/Bと、を有する。なお、ハイクラッチH/Cは、4つの回転要素の何れか2つの回転要素を連結可能な位置に設けたものであれば良い。
【0037】
前記副変速機付き無段変速機CVTは、CVTコントローラ7により変速比制御される。すなわち、ローブレーキL/Bを締結した低速モードの選択時、車速VSPとアクセル開度APOにより決まる運転点が、図3に示す変速線図のA領域とB領域に存在する限り低速モードの選択を維持する。そして、運転点が、図3に示す変速線図の低速モード最High線(=L-Hモード切換線)を横切ると、低速モードから高速モードへ移行する制御指令を出す。また、ハイクラッチH/Cを締結した高速モードの選択時、車速VSPとアクセル開度APOにより決まる運転点が、図3に示す変速線図のB領域とC領域に存在する限り高速モードの選択を維持する。そして、運転点が、図3に示す変速線図の高速モード最Low線(=H-Lモード切換線)を横切ると、高速モードから低速モードへ移行する制御指令を出す。これにより、低速モードの選択時の変速比幅(A領域+B領域)と高速モードの選択時の変速比幅(B領域+C領域)を狭くし、両プーリ34a,34bの小型化を達成しながら、トータル変速比幅(A領域+B領域+C領域)の拡大が実現される。
【0038】
[回生発電制御構成]
図4は、実施例1の統合コントローラ10で行われる回生発電制御処理のメインルーチンを示すフローチャートであり、図5は、回生発電制御処理のうちip=1近傍制御処理を示すフローチャートである(回生発電制御手段)。以下、図4及び図5に基づき、回生発電制御構成をあらわす各ステップについて説明する。なお、図4及び図5のフローチャートは、ASCDやACC等による定速走行制御の選択時に実行される。
【0039】
ステップS1では、ACC等の定速走行制御中に、ナビゲーションコントローラ23から自車の走行が予定される前方道路の路面勾配情報(平坦路、下り勾配路、上り勾配路)を読み込むと共に、制御開始距離を演算し、ステップS2へ進む。
ここで、制御開始距離は、前方道路の路面勾配が下り勾配であるとき、車両が降坂路にさしかかる前にip=1近傍制御を開始する距離である。制御開始距離の演算は、地形情報からの勾配継続距離と、現在の車速、副変速機付き無段変速機CVTの変速速度等により最適な距離が演算される。
【0040】
ステップS2では、ステップS1での前方道路の路面勾配情報読み込みと制御開始距離の演算に続き、ip=1近傍制御が有効に働く道路情報を認識すると、ip=1近傍制御を実施しない通常走行時に必要となるオイルポンプ負荷とフリクションの積分値による仕事量Aを演算し、ステップS3へ進む。
ここで、各フリクション情報は、各モジュールの動作条件によりマップを予め作成しておき、その値を読み出すことにより制御開始から終了までのフリクション、および減速度等のプロファイルを規定する。また、オイルポンプ負荷は、現在の変速比ipを保つライン圧制御を行うときのポンプ負荷とする。
【0041】
ステップS3では、ステップS2での仕事量Aの演算に続き、ip=1近傍制御を実施した場合に必要となるオイルポンプ負荷とフリクションの積分値による仕事量Bを演算し、ステップS3へ進む。
ここで、各フリクション情報は、ステップS2と同様であり、オイルポンプ負荷は、変速比ipを、ip=1とする最小ライン圧制御を行うときのポンプ負荷とする。
【0042】
ステップS4では、ステップS3での仕事量Bの演算に続き、仕事量Aと仕事量Bの差分が設定値C以上であり、かつ、自車が制御開始距離内にあるか否かを判断する。YES(A−B≧C、かつ、制御開始距離に到達)の場合はステップS5へ進み、NO(A−B<C、または、制御開始距離に未達)の場合はステップS8へ進む。
ここで、仕事量Aと仕事量Bの差分は、ライン圧PLを低下させることで増加する回生エネルギと、ライン圧PLを低下させるのに必要なエネルギと、の差であるエネルギ収支に相当する(エネルギ収支演算手段)。
また、Cの値は、エネルギ回収率を規定する係数であるが、制御上、ドライバに違和感を与えない範囲でなるべく小さな値に設定される。
【0043】
ステップS5では、ステップS4でのA−B≧C、かつ、制御開始距離に到達であるとの判断、あるいは、ステップS6での終了制御開始距離に未達であるとの判断に続き、ip=1近傍制御を実施し(図5)、ステップS6へ進む。
このステップS5では、ip=1近傍制御の実施によりライン圧PLを下げた上でモータ/ジェネレータMGにより回生発電が行われる。
【0044】
ステップS6では、ステップS5でのip=1近傍制御の実施に続き、演算された終了制御開始距離に到達したか否かを判断する。YES(終了制御開始距離に到達)の場合はステップS7へ進み、NO(終了制御開始距離に未達)の場合はステップS5へ戻る。
ここで、終了制御開始距離は、制御開始距離と同様に、勾配継続距離と、現在の車速、副変速機付き無段変速機CVTの変速速度等により計算する。
【0045】
ステップS7では、ステップS6での終了制御開始距離に到達であるとの判断に続き、車両が終了制御開始距離(制御開始位置からの相対距離)に到達すると、アクセル開度APOと車速VSPにより目標変速比を決める通常の変速比制御に戻す終了制御を開始する通常制御移行処理を実施し、ステップS8へ進む。
【0046】
ステップS8では、ステップS7での通常制御移行処理の実施に続き、現在のアクセル開度APOと車速VSPより最適な変速比を得る変速比制御による通常制御処理を実施し、ステップS1へ戻る。
すなわち、通常のACC等による定速走行制御に移行する。そして、ACC等による定速走行制御時は、常にステップS1に戻り、エネルギ回収のための判断/制御を繰り返す。
【0047】
ステップS51では、図5のサブルーチンが呼び出されてip=1近傍制御が開始されると、現在位置での目標スロットル開度と目標減速度を演算し、ステップS52へ進む(目標減速度演算部)。
ここで、目標スロットル開度と目標減速度は、パラメータの中で単位時間の変化率が最小であるベルト式無段変速機構34の変速速度に基づいてステップS1〜ステップS2にて目標減速度のプロファイルを計算し、目標減速度のプロファイルに基づいて演算する。
【0048】
ステップS52では、ステップS51での目標スロットル開度と目標減速度の演算に続き、車両が降坂路にさしかかる前に開始されたip=1近傍制御による副変速機付き無段変速機CVTの変速比ipが、ip=1±αであるか否かを判断する。YES(ip=1±α)の場合はステップS54へ進み、NO(ip≠1±α)の場合はステップS53へ進む。
ここで、ip=1近傍制御は、時定数の大きなCVT変速比制御から開始される。変速比許容誤差αは、現在の変速比と単位時間当たりの変速速度より計算する。
【0049】
ステップS53では、ステップS52でのip≠1±αであるとの判断に続き、副変速機付き無段変速機CVTの変速比ipを、徐々にip=1に近づけていく変速比制御(この変速比制御には、副変速機構35の制御も含まれる)を行い、ステップS54へ進む。
【0050】
ステップS54では、ステップS52でのip=1±αであるとの判断、あるいは、ステップS53での変速比制御に続き、実スロットル開度が目標スロットル開度±βか否かを判断する。YES(実スロットル開度=目標スロットル開度±β)の場合はステップS56へ進み、NO(実スロットル開度≠目標スロットル開度±β)の場合はステップS55へ進む。
【0051】
ステップS55では、ステップS54での実スロットル開度≠目標スロットル開度±βであるとの判断に続き、電子スロットルを制御することにより、実スロットル開度を目標スロットル開度に近づける制御を実施し、ステップS56へ進む。
このスロットル開度制御は、減速度を制御するためであり、急激にスロットル開度を制御すると違和感が生じるため定数βにて変化を抑制する。
【0052】
ステップS56では、ステップS54での実スロットル開度=目標スロットル開度±βであるとの判断、あるいは、ステップS55でのスロットル開度制御に続き、実減速度が目標減速度±γか否かを判断する。YES(実減速度=目標減速度±γ)の場合はip=1近傍制御終了へ進み、NO(実減速度≠目標減速度±γ)の場合はステップS57へ進む。
【0053】
ステップS57では、ステップS56での実減速度≠目標減速度±γであるとの判断に続き、ゲイン小によるスロットル開度制御と変速比制御の少なくとも一方の制御により、減速度の補償を行い、ip=1近傍制御終了へ進む(減速度補償制御部)。
この減速度補償制御は、上記変速比制御と上記スロットル開度制御の結果、あらかじめ予測した減速度のプロファイルとの誤差が生じた場合にはその差分を補償するために行う。減速度補償制御でのパラメータは、変速比とスロットル開度であり、必要な時定数に応じて変速比、もしくは、スロットル開度を適切に割り当て、減速度変化率により違和感を与えないように設定した定数γを超えないように実施する。
ここで、ip=1近傍制御終了へ進むと制御ルーチンは終了であるが、終了制御開始距離の判定(ステップS6)の条件が成立するまでは、同サブルーチンが呼び出される。尚、パラメータC、α、β、およびγは、車両の特性により異なる値であるため、実験により最適値を得ることになる。
【0054】
次に、作用を説明する。
まず、「回生発電制御技術の課題」の説明を行う。続いて、実施例1の車両の回生発電制御装置における作用を、「回生発電制御技術の背景と考え方」、「コースト定速走行時の回生発電制御作用」、「コースト定速走行時のip=1近傍制御作用」、「コースト定速走行時の燃費向上作用」に分けて説明する。
【0055】
[回生発電制御技術の課題]
ASCDやACC等による定速走行時に、燃費を向上させるには、ドライブ側でエンジン運転効率の良い回転域に無段変速機の変速比を制御するのが一般的である。それに対して、コースト側では車両の慣性エネルギを効率良く回生することが必要となる。
【0056】
また、ASCDやACC等による定速走行時には、ドライバのアクセル操作が伴わない。このため、ドライバのアクセル操作によらず、運転性を損なわない範囲で、エンジン及び無段変速機の運転状態をシステムが統合制御し、各運転状態における最大回生量を得ることが可能となる。
【0057】
例えば、下り坂で多くの発電量が必要となる場合、変速比を大としてオルタネータの効率を上げるのは公知である。しかしながら、運転状態によっては、ロー変速によるコーストトルクの増大、更に、無段変速機のフリクションが大の条件と重なり、車両トータルのエネルギ回収率が悪化し、結果として、車両トータルのエネルギ回収率がそれほど改善されないことも考えられる。
【0058】
[回生発電制御技術の背景と考え方]
そこで、オルタネータの回生効率のみに注目するのではなく、車両トータルの効率を考え、無段変速機やエンジンのフリクションを下げる事でオルタネータの効率がさほど良くない領域でも所望の回生量を実現することが可能となる。
【0059】
無段変速機は、変速比ipが、ip=1の運転状態のフリクションがもっとも低いのは公知(特開平11-191903号公報等)である。しかし、一般的に無段変速機の変速比を大きく変化させるには、数秒単位の変速時間を要するため、走行路の状況が大きく変化しないことを事前に知ることが出来ないと、変速比を大きく変化させるような制御に移行することは難しい。
【0060】
ところで、現在道路の曲率、勾配、制限速度等のデータベース化が進んでおり、ナビゲーションシステム等にデータを格納することで、現在走行中の地点より先の道路情報を読出し、現在のASCDやACC等での設定車速を維持する前提で勾配等の道路情報を時系列でマップ化することが可能となりつつある。
【0061】
ASCDやACC等による定速走行制御を行うには、道路勾配の先読みを実施し、時系列で車両に必要な減速度を計算し、各時刻で適切な減速度(フリクション変化)をエンジンや無段変速機等の各構成要素を制御することにより実現する必要がある。
【0062】
同様の方法で、時系列の道路情報を入手することにより、前述の無段変速機の変速比の大幅な変化が伴うような時定数大となる制御も、走行路の変化に応じて無理なく実施することが可能となる。
【0063】
例えば、有料道路走行中、しばらくインターチェンジがなく長時間ほぼ一定の勾配が継続する場合などは、無段変速機のフリクションを下げ、回生効率を上げるのに適した状況である。
【0064】
長時間ほぼ一定の勾配が継続する場合、無段変速機の変速比ipを、ip=1近傍で制御しても運転性(音振性能)上問題なければ、ip=1近傍での運転に切り替えることで、変速によるコーストトルクの上昇を考慮しても、数Nmのフリクション低減ができることとなる(図7参照)。このフリクション低減分を、オルタネータの駆動トルクを増大分とするができることで、結果、高い回生電流の要求に対応することが可能となる。
【0065】
前記無段変速機の変速比ipを、ip=1近傍での運転を実現するためには、道路勾配の細かな変化に対し制御の異なる時定数の制御を併用する必要がある。その際、無段変速機の変速よりも時定数の低い電子スロットル制御によるポンプロス増減が有効であり、オルタネータにインバータの接続されている車両では、インバータによる回生負荷の増減等が有効である。
【0066】
前記無段変速機の変速比ipを、ip=1近傍で運転する制御を行うことにより、常にライン圧の低いip=1を原点とした制御に移行する(図6参照)。このため、制御実施中のトータルエネルギロスが低減され、効果的に慣性エネルギの回収が行える走行シーンが増えることとなり、ドライブ側での走行時に蓄積したエネルギを利用することが可能となる。
【0067】
ドライブ側で蓄積したエネルギを使用する際は、コースト側と同様にナビゲーションシステム等から勾配情報を得ることにより、充電可能な下り勾配が長時間続く場合には、下り勾配に到達する前に予め走行エネルギのモータ分担率を上げる。これにより、下り勾配にて得られる見込みのエネルギを消費しておくことで、効果的に燃費の向上を達成することが可能となる。
【0068】
前記無段変速機の変速比ipを、ip=1近傍の制御に移行するための判断条件を整理すると、
(a) ASCDやACC等により定速走行モードが設定され、ドライバがアクセルから足を離していること。
(b) ナビゲーションシステム等にからの勾配情報から推測される制御のエネルギ収支が通常制御よりも小であること。
(c) 制御中に走行路が変わらないこと。すなわち、ip=1近傍制御を実施する区間に分岐がないこと。
等が挙げられる。
【0069】
一般に、変速状態にある無段変速機では、伝達トルクが一定であっても変速比一定の状態よりもプーリに印加する推力が大となる。理由としては、変速のためにプライマリプーリとセカンダリプーリの何れかに変速比一定の状態よりも大きな推力を与える必要があるからである。他方のプーリにもトルク伝達を行うための推力の印加が必要となる。このため、ライン圧は、それぞれのプーリに必要となる油圧を供給可能とするだけの仕事をすることとなり、結果として、変速時にはオイルポンプの負荷が増大することとなる。
【0070】
前記無段変速機の変速比ipを、ip=1近傍の制御に移行するための判断条件の一つである制御によるエネルギ収支が、通常制御のエネルギよりも小であるということは、言い換えると、ip=1近傍の制御のために必要となる変速に要するオイルポンプの仕事量(通常制御に復帰する際の仕事量も含む)よりも、ip=1近傍の制御中に対通常制御に節約することのできるオイルポンプの仕事量が大となるということである。
【0071】
前記無段変速機の変速比ipを、ip=1近傍の制御を実施可能な走行状態は、車両諸元や性能により制限されることとなる。例えば、ファイナルギヤ比によりip=1の際のエンジン回転数はロックアップを前提として一義的に決定される。よって、音振性能を考慮すると、制御中のエンジン回転数は、一般的に3000rpm程度を上限に設計すべきである。その結果、当該制御を実施する車速は制限されることになり実際の走行条件によっては有効に慣性エネルギを回生可能なシーンは限られることとなる。
【0072】
しかしながら、現在、副変速機を持つCVTユニットである副変速機付き無段変速機が増えつつある。副変速機付き無段変速機では、ある車速においてロックアップを前提としたエンジン回転数は2つ以上選択することができ、当該制御を実施可能なシーンは2倍以上に拡大されることとなり、同制御によるエネルギ回生を更に有効に実施することが可能となる。
【0073】
[コースト定速走行時の回生発電制御作用]
上記のように、降坂路でのコースト定速走行時、所定の条件が成立すると、ip=1近傍制御に移行し、ライン圧PLを低下させた上で、回生発電制御を実施する。以下、図4に基づき、これを反映するコースト定速走行時の回生発電制御作用を説明する。
【0074】
まず、ACC等の定速走行制御中であって、A−B<C、または、制御開始距離に未達の場合には、図4のフローチャートにおいて、ステップS1→ステップS2→ステップS3→ステップS4→ステップS8へと進む流れが繰り返される。すなわち、通常のACC等による定速走行制御が実施されると共に、現在のアクセル開度APOと車速VSPより最適な変速比を得る変速比制御による通常制御処理が実施される。但し、常にステップS4でのエネルギ回収のための判断は繰り返えされる。
【0075】
そして、ACC等の定速走行制御中であって、A−B≧C、かつ、制御開始距離に到達という条件が成立すると、図4のフローチャートにおいて、ステップS4からステップS5→ステップS6へと進む。そして、ステップS6にて終了制御開始距離に到達したと判断されるまで、ステップS5→ステップS6へと進む流れが繰り返され、ステップS5にてip=1近傍制御が実施される(図5のフローチャート)。このip=1近傍制御の実施によりライン圧PLを下げた上でモータ/ジェネレータMGにより回生発電が行われる。
【0076】
そして、ステップS6にて終了制御開始距離に到達したと判断されると、図4のフローチャートにおいて、ステップS6からステップS7→ステップS8へと進み、ステップS1へ戻る。つまり、ステップS7にて通常制御移行処理が行われ、ステップS8にてip=1近傍制御から通常制御処理に復帰する。
【0077】
上記のように、実施例1では、アクセルオフ操作によるコースト走行時に、ip=1近傍制御の実施により、副変速機付き無段変速機CVTへの変速油圧の元圧であるライン圧PLを低下させた上で回生発電を行う構成を採用した。
このように、回生発電を行うとき、ip=1近傍制御によりライン圧PLを低下させることで、ライン圧PLを作り出すメインオイルポンプM-O/PやサブオイルポンプS-O/Pによるポンプ負荷が低減される。そして、ライン圧PLが低下することによりベルト式無段変速機構34のプーリ推力(=ベルトクランプ力)が低下し、図6の矢印に示すように、ベルト巻き付け径を同径とするip=1に向かって変速比が移行する。そして、ip=1に向かっての変速比移行に伴い、図7に示すように、副変速機付き無段変速機CVTでのフリクショントルクが低減される。このため、ポンプ負荷低減分とフリクショントルク低減分を、回生電力としてバッテリ4に蓄積することができ、燃費が向上する。
したがって、降坂路でのコースト定速走行時に回生発電を行うとき、車両トータルとしてのエネルギ回収率の改善が図られる。
【0078】
実施例1では、アクセルオフ操作によるコースト走行時に回生発電を行うとき、ライン圧PLを低下させるために、ip=1近傍制御を実施するようにした。
したがって、降坂路でのコースト定速走行時に回生発電を行うとき、ip=1近傍制御の実施により、図7に示すように、CVTフリクショントルクを最大限まで低減させることができるというように、車両トータルとしてのエネルギ回収率の高い改善代が確保される。
【0079】
実施例1では、前方道路の路面勾配が下り勾配であるとき、車両が降坂路にさしかかる前の制御開始距離に到達すると(ステップS4でYES)、ip=1近傍制御を開始する(ステップS5)。つまり、降坂路が近づいたと判断される場合に、降坂路にさしかかる前に副変速機付き無段変速機CVTへのライン圧PLを下げる構成を採用した。
この構成により、降坂路に到達する前の変速比から変速比ip=1に移行するまでに時間がかかる場合であっても、降坂路への到達に先行して変速比ip=1への移行を終えることができる。
したがって、降坂路でのコースト定速走行時に回生発電を行うとき、降坂路に到達するまでに副変速機付き無段変速機CVTへのライン圧PLを下げることで、降坂路に到達してからの回生発電量がより拡大される。
【0080】
実施例1では、車両が降坂路を終了する前の終了制御開始距離に到達すると(ステップS6でYES)、ip=1近傍制御から通常制御へ移行する(ステップS7)。つまり、降坂路が終了すると判断される場合に、降坂路が終了する前に通常の変速比制御に戻しておく構成を採用した。
したがって、降坂路でのコースト定速走行時に回生発電を行うとき、降坂路が終了する前に変速比を元に戻しておくことで、平坦路走行時に変速することで発生する違和感が防止される。
【0081】
実施例1では、ip=1近傍制御を実施しないときの仕事量A(損失分)と、ip=1近傍制御を実施した場合の仕事量B(損失分)を演算し、仕事量Aと仕事量Bの差分が設定値C以上であると(ステップS4でYES)、ip=1近傍制御を開始する(ステップS5)。つまり、ライン圧PLを低下させる制御に必要なエネルギよりも、ライン圧PLを低下させることで増加する回生エネルギが大きいと判断される場合に、副変速機付き無段変速機CVTのライン圧PLを下げる制御を行う構成を採用した。
したがって、不用意に変速比ipを1とするip=1近傍制御に入ることで、むしろ燃費悪化を招くことが防止される。
【0082】
実施例1では、無段変速機を、変速比幅を拡大した副変速機付き無段変速機CVTとする構成を採用した。
したがって、降坂路でのコースト定速走行時に回生発電を行うとき、副変速機付き無段変速機CVTへのライン圧PLを低下させる制御を実施可能な走行状態が増加することで、より燃費を向上させる頻度が高められる。
【0083】
[コースト定速走行時のip=1近傍制御作用]
上記のように、コースト定速走行時に回生発電制御を行うとき、ライン圧PLを低下させるためにip=1近傍制御を用いた。よって、ip=1近傍制御に移行した後、走行路勾配の変化による減速度の違和感を与えない工夫が必要である。以下、図5に基づき、これを反映するコースト定速走行時のip=1近傍制御作用を説明する。
【0084】
まず、変速比条件(ステップS52)・目標スロットル開度条件(ステップS54)・目標減速度条件(ステップS56)が成立していない状態から、ip=1近傍制御処理が開始されると、図5のフローチャートにおいて、ステップS51→ステップS52→ステップS53へと進む。ステップS53では、そのときの副変速機付き無段変速機CVTの変速比ipを、徐々にip=1に近づけていく変速比制御(副変速機構35の制御を含む)が行われる。
【0085】
そして、ステップS53からステップS54→ステップS55へと進み、ステップS55では、電子スロットルを制御することにより、実スロットル開度を目標スロットル開度に近づける制御が実施される。
【0086】
さらに、ステップS55からステップS56→ステップS57へと進み、ステップS57では、ゲイン小によるスロットル開度制御と変速比制御の少なくとも一方の制御により、減速度の補正が行われる。
【0087】
上記ステップS51→ステップS52→ステップS53→ステップS54→ステップS55→ステップS56→ステップS57へと進む流れを繰り返すことで、変速比条件(ステップS52)・目標スロットル開度条件(ステップS54)・目標減速度条件(ステップS56)が成立する。これら3条件が成立すると、図5のフローチャートにおいて、ステップS51→ステップS52→ステップS54→ステップS56へと進む流れが繰り返えされる。つまり、終了制御開始距離の判定(ステップS6)の条件が成立するまで、変速比ip=1±α、実スロットル開度=目標スロットル開度±β、実減速度=目標減速度±γによるip=1近傍制御処理が維持される。
【0088】
その後、走行路勾配の変化により目標減速度が変わると、ステップS51→ステップS52→ステップS54→ステップS56→ステップS57へと進む流れを繰り返す。つまり、ステップS57において、ゲイン小によるスロットル開度制御と変速比制御の少なくとも一方の制御により、減速度の補償が行われる。
【0089】
実施例1では、ライン圧PLを低下させるip=1近傍制御を行う際、目標減速度を演算し(ステップS51)、目標減速度と実減速度の差を、エンジンEngのスロットル開度を制御することで補償する構成を採用した(ステップS57)。
この構成により、ライン圧PLを低下させるip=1近傍制御を実行することで、ip=1近傍制御への移行後、走行路勾配に微小な変化があったとしても、エンジン負荷を変えるスロットル開度制御により柔軟に対応して目標減速度に近い実減速度が保たれる。
したがって、降坂路でのコースト定速走行時に回生発電を行うとき、回生発電中の走行路勾配の変化にかかわらず、スロットル開度制御により目標減速度を保つことで、ドライバに与える減速違和感が防止される。
【0090】
[コースト定速走行時の燃費向上作用]
上記のように、降坂路でのコースト定速走行時、回生発電を行うのは、エンジンEngによる駆動分担を減少し、燃費を向上させるたである。以下、図8に示すタームチャートに基づき、これを反映するコースト定速走行時の燃費向上作用を説明する。
【0091】
制御開始距離に到達する時刻t1までは、平坦路でのコースト定速走行中であり、ライン圧PLは、図8のDに示すように、定常ライン圧であり、変速比ipは、図8のD’に示すように、オーバードライブ変速比である。平坦路でのコースト定速走行中のライン圧PLと変速比ipを、図6で示すと、例えば、ライン圧PL=D、変速比ip=D’である。
【0092】
制御開始距離に到達する時刻t1から時刻t2までは、副変速比変更を含んで変速比制御が行われると共に、スロットル開度を徐々に開き、回生発電量を徐々に増やす回生発電制御が行われる。時刻t1から時刻t2までは、変速比ipを、オーバードライブ変速比(OD)からip=1に向かって変速する変速過渡期であるため、ライン圧PLは、図8のEに示すように、通常より油圧が上がり、変速比ipは、図8のE’に示すように、変速比ipが、オーバードライブ変速比から徐々に変速比1へ移行する。このip=1近傍制御の開始域におけるライン圧PLと変速比ipの変化を、図6で示すと、例えば、矢印Eである。
【0093】
変速比ipがip=1±αに到達する時刻t2から時刻t3までは、下り勾配Δ%以上(エンブレ可の区間)であり、変速比ipがip≒1(ライン圧PLは最小圧)が維持されると共に、目標スロットル開度により回生発電量を最適化させての回生発電制御が行われる。時刻t2から時刻t3までの区間は、変速比ipを、図8のF’に示すように、ip≒1に維持する区間であるため、ライン圧PLは、図8のFに示すように、ポンプ損失やフリクション損失が最小の油圧が維持される。このip=1近傍制御域におけるライン圧PLと変速比ipを、図6で示すと、例えば、ライン圧PL=F、変速比ip=F’である。
【0094】
終了制御開始距離に到達する時刻t3から時刻t4までは、副変速比変更を含んで変速比制御が行われると共に、スロットル開度を徐々に閉じ、回生発電量を徐々に減らす回生発電制御が行われる。時刻t3から時刻t4までは、変速比ipを、ip≒1からオーバードライブ変速比(OD)に向かって変速する変速過渡期であるため、ライン圧PLは、図8のGに示すように、通常より油圧が上がり、変速比ipは、図8のG’に示すように、変速比ipが、変速比1からオーバードライブ変速比へ徐々に移行する。このip=1近傍制御の終了域におけるライン圧PLと変速比ipの変化を、図6で示すと、例えば、矢印Gである。
【0095】
オーバードライブ変速比(OD)に到達する時刻t4からは、平坦路(勾配=0%)でのコースト定速走行中に復帰するため、ライン圧PLは、図8のHに示すように、定常ライン圧であり、変速比ipは、図8のH’に示すように、オーバードライブ変速比である。平坦路でのコースト定速走行制御へ復帰するときのライン圧PLと変速比ipを、図6で示すと、例えば、ライン圧PL=H、変速比ip=H’である。
【0096】
上記のように、実施例1では、降坂路でのコースト定速走行時、時刻t2から時刻t3までの区間において、変速比ipをp≒1に維持し、ライン圧PLを損失が最小となる油圧に維持する。したがって、時刻t2から時刻t3までの下り勾配をコースト走行する区間において、回生発電量が最大化される。
【0097】
加えて、時刻t1から時刻t2までの区間では、副変速比変更を含んで変速比制御が行われると共に、スロットル開度を徐々に開き、回生発電量を徐々に増やす回生発電制御が行われる。したがって、変速比制御とスロットル開度を併用しながら、回生発電制御による回生発電量を増大させることで、違和感なくスムーズに最大化した回生発電域に移行することができる。
【0098】
さらに、時刻t3から時刻t4までの区間では、副変速比変更を含んで変速比制御が行われると共に、スロットル開度を徐々に閉じ、回生発電量を徐々に減らす回生発電制御が行われる。したがって、変速比制御とスロットル開度を併用しながら、回生発電制御による回生発電量を減少させることで、違和感なくスムーズに回生発電をしないコースト定速走行に移行することができる。
【0099】
次に、効果を説明する。
実施例1のハイブリッド車両の回生発電制御装置にあっては、下記に列挙する効果を得ることができる。
【0100】
(1) 駆動輪(左右タイヤLT,RT)に対して動力を伝達する無段変速機(副変速機付き無段変速機CVT)と、
動力伝達経路からの動力により発電を行う発電機(モータ/ジェネレータMG)と、
アクセルオフ操作によるコースト走行時に、前記無段変速機(副変速機付き無段変速機CVT)への変速油圧の元圧であるライン圧PLを低下させた上で回生発電を行う回生発電制御手段(図4,図5)と、
を備える。
このため、アクセルオフ操作によるコースト走行時、車両トータルとしてのエネルギ回収率の改善を図ることができる。
【0101】
(2) 車両が走行している道路状況を検出する道路状況検出手段(ナビゲーションコントローラ23)と、を備え、
前記回生発電制御手段(図4,図5)は、前記道路状況検出手段(ナビゲーションコントローラ23)により所定の降坂路が近づいたと判断される場合に、車両が降坂路にさしかかる前に、ライン圧PLの低下制御を開始する(ステップS4→ステップS5)。
このため、(1)の効果に加え、降坂路でのコースト定速走行時に回生発電を行うとき、降坂路に到達するまでに無段変速機(副変速機付き無段変速機CVT)へのライン圧PLを下げることで、降坂路に到達してからの回生発電量をより拡大することができる。
【0102】
(3) 前記回生発電制御手段(図4,図5)は、前記道路状況検出手段(ナビゲーションコントローラ23)により所定の降坂路が終了すると判断される場合に、降坂路が終了する前に、前記無段変速機(副変速機付き無段変速機CVT)の変速比制御を、アクセル開度APOと車速VSPにより目標変速比を決める通常の変速比制御に戻しておく(ステップS6→ステップS7)。
このため、(2)の効果に加え、降坂路でのコースト定速走行時に回生発電を行うとき、降坂路が終了する前に変速比を元に戻しておくことで、平坦路走行時に復帰した後で変速することにより発生する違和感を防止することができる。
【0103】
(4) 前記ライン圧PLを低下させるのに必要なエネルギと、前記ライン圧PLを低下させることで増加する回生エネルギと、を演算するエネルギ収支演算手段(ステップS2,S3,S4)と、を備え、
前記回生発電制御手段(図4,図5)は、前記道路状況検出手段(ナビゲーションコントローラ23)により検出された降坂路に車両が近づく前に、ライン圧PLを低下させるのに必要なエネルギよりも、ライン圧PLを低下させることで増加する回生エネルギが大きいと判断される場合に、前記無段変速機(副変速機付き無段変速機CVT)へのライン圧PLを低下させる制御を行う(ステップS4→ステップS5)。
このため、(2)または(3)の効果に加え、ライン圧PLを低下するとエネルギ収支がマイナスとなる場合、不用意にライン圧PLを低下させる制御に入ることで燃費悪化を招くことを防止することができる。
【0104】
(5) 前記回生発電制御手段(図4,図5)は、前記無段変速機(副変速機付き無段変速機CVT)の目標変速比を1近傍の値とする変速比制御によりライン圧PLを低下させる(ステップS5,図5)。
このため、(1)〜(4)の効果に加え、降坂路でのコースト定速走行時に回生発電を行うとき、ip=1近傍制御の実施により、CVTフリクショントルクを最大限まで低減させることが可能であり、車両トータルとしてのエネルギ回収率の高い改善代を確保することができる。
【0105】
(6) 前記無段変速機は、無段変速機構(ベルト式無段変速機構34)に副変速機構35を組み合わせた副変速機付き無段変速機CVTである。
このため、(1)〜(5)の効果に加え、降坂路でのコースト定速走行時に回生発電を行うとき、副変速機付き無段変速機CVTへのライン圧PLを低下させる制御を実施可能な走行状態が増加することで、より燃費を向上させる頻度を高めることができる。
【0106】
(7) 前記動力伝達経路にエンジンEngを備え、
前記回生発電制御手段(図4,図5)は、ライン圧PLを低下させる変速比制御を行う際、目標減速度を演算する目標減速度演算部(ステップS51)と、前記目標減速度と実減速度の差を、前記エンジンEngのスロットル開度を制御することで補償する減速度補償制御部(ステップS57)と、を有する。
このため、(1)〜(6)の効果に加え、降坂路でのコースト定速走行時に回生発電を行うとき、回生発電中の走行路勾配の変化にかかわらず、スロットル開度制御により目標減速度を保つことで、ドライバに与える減速違和感を防止することができる。
【0107】
以上、本発明の車両の回生発電制御装置を実施例1に基づき説明してきたが、具体的な構成については、この実施例1に限られるものではなく、特許請求の範囲の各請求項に係る発明の要旨を逸脱しない限り、設計の変更や追加等は許容される。
【0108】
実施例1では、回生発電制御手段として、ASCDやACC等の定速走行制御を選択してのアクセルオフ操作によるコースト定速走行時に、ライン圧PLを下げた上で、所定の減速走行を保ちながら回生発電する例を示した。しかし、ASCDやACC等の定速走行制御システムが搭載されていない車両において、下り勾配等においてアクセルオフ操作による通常のコースト走行を行う時にも適用することができる。さらに、減速走行時に限らず、下り勾配の一定速走行時も回生発電可能な走行モードであるため、これらのアクセルオフ操作によるコースト走行時には、本発明の回生発電制御を適用することができる。
【0109】
実施例1では、回生発電制御手段の協調制御として、ip=1近傍制御(変速比制御)を実施することで、ライン圧PLを低下させる例を示した。しかし、回生発電制御手段の協調制御としては、変速比制御は通常制御のままで、ライン圧PLを低下させるライン圧制御を行うような例としても良い。さらに、変速比制御とライン圧制御を併用する例であっても良い。要するに、アクセルオフ操作によるコースト走行時に回生発電を行うにあたって、無段変速機への変速油圧の元圧であるライン圧を低下させる協調制御を実行すれば良い。
【0110】
実施例1では、発電機として、ハイブリッド車両の副変速機付き無段変速機CVTに接続するモータ/ジェネレータMGを用いる例を示した。しかし、発電機としては、コンベ車両のエンジンに接続するオルタネータも含む。また、無段変速機としては、副変速機無しのベルト式無段変速機、等を用いるものであっても良い。
【0111】
実施例1では、本発明の回生発電制御装置をハイブリッド車両に適用する例を示した。しかし、本発明の回生発電制御装置は、電動機を持たないガソリンエンジン車(ICE車両)、更に、電動機のみを持つ電気自動車に適用することができる。
【0112】
電動機を持たないガソリンエンジン車の場合は、ハイブリッド車と同様に燃費を向上させることができる。加えて、例えば、下り勾配の前では一時的オルタネータの負荷を減少させ、積極的にバッテリ電力をエアコン等の電気を消費する部位にて使用し、下り勾配では、オルタネータの負荷を上げ充電を実施する。通常のバッテリのみでなく、交流抵抗の低い大容量のキャパシタ等を使用すると、さらにエネルギ回生率が向上する。
【0113】
電動機のみを持つ電気自動車の場合は、実施例1で述べたようなエネルギマネージメントが更に重要となり、エネルギマネージメントに基づく制御により回生発電量を増大させることで、バッテリへの1回充電による走行可能距離を延ばす、つまり、電費を向上させることができる。
【符号の説明】
【0114】
Eng エンジン
MG モータ/ジェネレータ(発電機)
M-O/P メインオイルポンプ
S-O/P サブオイルポンプ
CVT 副変速機付き無段変速機(無段変速機)
IN 変速機入力軸
OUT 変速機出力軸
LT 左タイヤ(駆動輪)
RT 右タイヤ(駆動輪)
1 エンジンコントローラ
2 モータコントローラ
7 CVTコントローラ
10 統合コントローラ
23 ナビゲーションコントローラ(道路状況検出手段)
24 定速走行制御コントローラ
【特許請求の範囲】
【請求項1】
駆動輪に対して動力を伝達する無段変速機と、
動力伝達経路からの動力により発電を行う発電機と、
アクセルオフ操作によるコースト走行時に、前記無段変速機への変速油圧の元圧であるライン圧を低下させた上で回生発電を行う回生発電制御手段と、
を備えることを特徴とする車両の回生発電制御装置。
【請求項2】
請求項1に記載された車両の回生発電制御装置において、
車両が走行している道路状況を検出する道路状況検出手段と、を備え、
前記回生発電制御手段は、前記道路状況検出手段により所定の降坂路が近づいたと判断される場合に、車両が降坂路にさしかかる前に、ライン圧の低下制御を開始する
ことを特徴とする車両の回生発電制御装置。
【請求項3】
請求項2に記載された車両の回生発電制御装置において、
前記回生発電制御手段は、前記道路状況検出手段により所定の降坂路が終了すると判断される場合に、降坂路が終了する前に、前記無段変速機の変速比制御を、アクセル開度と車速により目標変速比を決める通常の変速比制御に戻しておく
ことを特徴とする車両の回生発電制御装置。
【請求項4】
請求項2又は請求項3に記載された車両の回生発電制御装置において、
前記ライン圧を低下させるのに必要なエネルギと、前記ライン圧を低下させることで増加する回生エネルギと、を演算するエネルギ収支演算手段と、を備え、
前記回生発電制御手段は、前記道路状況検出手段により検出された降坂路に車両が近づく前に、ライン圧を低下させるのに必要なエネルギよりも、ライン圧を低下させることで増加する回生エネルギが大きいと判断される場合に、前記無段変速機へのライン圧を低下させる制御を行う
ことを特徴とする車両の回生発電制御装置。
【請求項5】
請求項1から請求項4までの何れか1項に記載された車両の回生発電制御装置において、
前記回生発電制御手段は、前記無段変速機の目標変速比を1近傍の値とする変速比制御によりライン圧を低下させる
ことを特徴とする車両の回生発電制御装置。
【請求項6】
請求項1から請求項5までの何れか1項に記載された車両の回生発電制御装置において、
前記無段変速機は、無段変速機構に副変速機構を組み合わせた副変速機付き無段変速機である
ことを特徴とする車両の回生発電制御装置。
【請求項7】
請求項1から請求項6までの何れか1項に記載された車両の回生発電制御装置において、
前記動力伝達経路にエンジンを備え、
前記回生発電制御手段は、ライン圧を低下させる変速比制御を行う際、目標減速度を演算する目標減速度演算部と、前記目標減速度と実減速度の差を、前記エンジンのスロットル開度を制御することで補償する減速度補償制御部と、を有する
ことを特徴とする車両の回生発電制御装置。
【請求項1】
駆動輪に対して動力を伝達する無段変速機と、
動力伝達経路からの動力により発電を行う発電機と、
アクセルオフ操作によるコースト走行時に、前記無段変速機への変速油圧の元圧であるライン圧を低下させた上で回生発電を行う回生発電制御手段と、
を備えることを特徴とする車両の回生発電制御装置。
【請求項2】
請求項1に記載された車両の回生発電制御装置において、
車両が走行している道路状況を検出する道路状況検出手段と、を備え、
前記回生発電制御手段は、前記道路状況検出手段により所定の降坂路が近づいたと判断される場合に、車両が降坂路にさしかかる前に、ライン圧の低下制御を開始する
ことを特徴とする車両の回生発電制御装置。
【請求項3】
請求項2に記載された車両の回生発電制御装置において、
前記回生発電制御手段は、前記道路状況検出手段により所定の降坂路が終了すると判断される場合に、降坂路が終了する前に、前記無段変速機の変速比制御を、アクセル開度と車速により目標変速比を決める通常の変速比制御に戻しておく
ことを特徴とする車両の回生発電制御装置。
【請求項4】
請求項2又は請求項3に記載された車両の回生発電制御装置において、
前記ライン圧を低下させるのに必要なエネルギと、前記ライン圧を低下させることで増加する回生エネルギと、を演算するエネルギ収支演算手段と、を備え、
前記回生発電制御手段は、前記道路状況検出手段により検出された降坂路に車両が近づく前に、ライン圧を低下させるのに必要なエネルギよりも、ライン圧を低下させることで増加する回生エネルギが大きいと判断される場合に、前記無段変速機へのライン圧を低下させる制御を行う
ことを特徴とする車両の回生発電制御装置。
【請求項5】
請求項1から請求項4までの何れか1項に記載された車両の回生発電制御装置において、
前記回生発電制御手段は、前記無段変速機の目標変速比を1近傍の値とする変速比制御によりライン圧を低下させる
ことを特徴とする車両の回生発電制御装置。
【請求項6】
請求項1から請求項5までの何れか1項に記載された車両の回生発電制御装置において、
前記無段変速機は、無段変速機構に副変速機構を組み合わせた副変速機付き無段変速機である
ことを特徴とする車両の回生発電制御装置。
【請求項7】
請求項1から請求項6までの何れか1項に記載された車両の回生発電制御装置において、
前記動力伝達経路にエンジンを備え、
前記回生発電制御手段は、ライン圧を低下させる変速比制御を行う際、目標減速度を演算する目標減速度演算部と、前記目標減速度と実減速度の差を、前記エンジンのスロットル開度を制御することで補償する減速度補償制御部と、を有する
ことを特徴とする車両の回生発電制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2013−53641(P2013−53641A)
【公開日】平成25年3月21日(2013.3.21)
【国際特許分類】
【出願番号】特願2011−190466(P2011−190466)
【出願日】平成23年9月1日(2011.9.1)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
【公開日】平成25年3月21日(2013.3.21)
【国際特許分類】
【出願日】平成23年9月1日(2011.9.1)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
[ Back to top ]