
車両の挙動データ記憶制御システム及び記憶装置
【課題】「予期せぬ挙動」であるか否かの判定精度を向上させるようにする。
【解決手段】記憶装置3の挙動判断手段31が、取得した挙動データに基づいて「予期せぬ挙動」の発生を判断したとき、車両異常影響判断手段32が、当該「予期せぬ挙動」の発生タイミングが、取得した車両異常情報の当該取得タイミングに対して所定タイミング条件を満足する判断をすると、当該「予期せぬ挙動」の発生原因が当該車両異常の影響であると判断して、不揮発性メモリ38に挙動データは記憶しない。一方、前記所定タイミング条件を満足しない判断をすると、「予期せぬ挙動」の発生原因が当該車両異常の影響でないと判断して、当該「予期せぬ挙動」に関連する挙動データを「予期せぬ挙動データ」として不揮発性メモリ38に記憶する。
【解決手段】記憶装置3の挙動判断手段31が、取得した挙動データに基づいて「予期せぬ挙動」の発生を判断したとき、車両異常影響判断手段32が、当該「予期せぬ挙動」の発生タイミングが、取得した車両異常情報の当該取得タイミングに対して所定タイミング条件を満足する判断をすると、当該「予期せぬ挙動」の発生原因が当該車両異常の影響であると判断して、不揮発性メモリ38に挙動データは記憶しない。一方、前記所定タイミング条件を満足しない判断をすると、「予期せぬ挙動」の発生原因が当該車両異常の影響でないと判断して、当該「予期せぬ挙動」に関連する挙動データを「予期せぬ挙動データ」として不揮発性メモリ38に記憶する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、「予期せぬ挙動データ」を記憶する車両の挙動データ記憶制御システム及び記憶装置に関する。
【背景技術】
【0002】
従来、車両においては、異常挙動を検出したときにその際の車両の挙動を示す車両情報や制御情報といった挙動データを、事後の解析用としてメモリに記憶する技術がある(例えば特許文献1)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−185676号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、前記記憶装置のみで挙動データが所定条件を満たした際に異常挙動(原因が特定しにくい挙動)として判定する構成では、異常挙動と判定される原因となった挙動データが、車両異常の影響でドライバが異常行動をとった結果の挙動データである場合には、原因が明確であるにもかかわらず、異常挙動(「予期せぬ挙動」)の原因である「予期せぬ挙動データ」としてメモリに記憶されてしまう。一具体例としては、加速度が所定値以上となることを記憶装置が異常挙動と判定する条件とし、回転メーターが故障して回転数ゼロを示した場合にドライバがこの回転数ゼロを見て思わずアクセルを踏み込んで加速度が所定値以上となった場合、この加速度が急上昇した挙動は、回転メーター故障の影響によるものであるにもかかわらず、原因が不明の「予期せぬ挙動」として判断すると考えられる。しかしながら、メモリの記憶容量は有限であるため車両異常の影響による挙動データも記憶してしまうと、本来記憶すべき「予期せぬ挙動」(原因が特定し難い挙動)を記憶するための容量が減ってしまう可能性が考えられる。
【0005】
そこで、本発明は、「予期せぬ挙動」であるか否かの判定精度を向上させることを目的とする。
【課題を解決するための手段】
【0006】
本発明は、次の点を考慮してなされている。車両異常が発生すると、これに反応したドライバが異常挙動をとることがある。この場合の異常挙動は本来記憶したい「予期せぬ挙動」ではないが、判定条件を満足すれば、「予期せぬ挙動」として判断することになる。このような場合、記憶装置が取得する車両異常情報と「予期せぬ挙動」との時間的関係は、車両異常情報を取得した後、「予期せぬ挙動」を判断することになる。
【0007】
従って、記憶装置が逐次取得している挙動データに基づいて「予期せぬ挙動」が発生したとして判定した場合に、その発生タイミングが車両機器異常情報の取得タイミングに対して所定条件例えば当該車両機器異常情報の取得タイミングより後という条件を満足すれば、当該「予期せぬ挙動」は車両異常の影響であると判断できる。
【0008】
この点に着目した請求項1の車両の挙動データ記憶システムにおいては、記憶装置は、車内ネットワークから、挙動データ及び車両異常情報を取得する。記憶装置の挙動判断手段が取得した挙動データに基づいて「予期せぬ挙動」の発生を判断したとき、車両異常影響判断手段が、当該「予期せぬ挙動」の発生タイミングが、取得した車両異常情報の当該取得タイミングに対して所定タイミング条件例えば時間的に後であることを満足するか否かを判断する。そして、この所定タイミング条件を満足する判断の場合、当該「予期せぬ挙動」の発生原因が当該車両異常の影響であると判断する。この場合には、記憶制御手段は、前記メモリに当該「予期せぬ挙動」に関連する挙動データは記憶しない。一方、前記所定タイミング条件を満足しないタイミングであるときには、車両異常影響判断手段は当該「予期せぬ挙動」の発生原因が当該車両異常の影響でないと判断する。そしてこの判断の場合は、記憶制御手段が当該「予期せぬ挙動」に関連する挙動データを「予期せぬ挙動データ」として前記メモリに記憶する。
【0009】
よって、「予期せぬ挙動」であるか否かの判定精度を向上させることができ、ひいては前記メモリの記憶容量を有効に使用することが可能となる。
請求項2の車両の挙動データ記憶システムは、前記車両異常検出装置が、車両異常発生から車両異常確定までの段階を示すフェイルカウンター値を有し、前記車両異常発生以後、当該異常発生が連続することを条件に当該フェイルカウンター値を初期値から増加し、このフェイルカウンター値が規定値まで増加されたときに車両異常確定を判断してフェイルカウンター値を初期値に戻し、異常発生が途切れたときに車両異常不成立を判断してフェイルカウンター値を初期値に戻す車両異常確定判断手段と、当該フェイルカウンター値、車両異常確定情報、車両異常不成立情報を車両異常情報に付帯させて前記車内ネットワーク上に送信するフェイルカウンター値送信手段とを有し、前記記憶装置の前記車両異常影響判断手段において、前記「予期せぬ挙動」の発生原因が当該車両異常の影響であると判断する前記所定タイミング条件は、前記フェイルカウンター値が所定値以上を示すタイミングであることを特徴とする。
【0010】
車両異常検出装置が車両異常を検出した場合、この車両異常が、なんらかの原因(例えばセンサ信号に外乱ノイズが乗るなど)で一時的に発生し、すぐに消失することがあり、つまり、車両異常として確定していないこともある。このため、上記請求項2において、車両異常検出装置がフェイルカウンター値をもって車両異常確定、不成立を判断することは、記憶装置側で真の車両異常を取り扱うことができるという点から意義がある。又、このフェイルカウンター値をもって車両異常の発生から確定までの時間的段階、つまり、このフェイルカウンター値から、「予期せぬ挙動」発生タイミングに対する車両異常発生タイミングの時間的関係も判る。つまり、上記請求項2において、挙動判断手段が「予期せぬ挙動」の発生を判断したとき、当該「予期せぬ挙動」の発生タイミングが、前記所定タイミング条件である前記フェイルカウンター値が所定値以上を示すタイミングであるときには、当該フェイルカウンター値をもって車両異常が発生した後に「予期せぬ挙動」が発生したことと見なすことができる。つまり、フェイルカウンター値をもって、当該「予期せぬ挙動」の発生原因が当該車両異常の影響であるか否かを判断でき、判断処理が容易且つ迅速となる。
【0011】
請求項3の車両の挙動データ記憶システムは、前記記憶装置が、さらに、前記挙動判断手段が取得した挙動データに基づいて「予期せぬ挙動」が発生したと判断した後、当該「予期せぬ挙動」の発生が連続して所定時間継続されたことをもって当該「予期せぬ挙動」が確定したことを判断し、前記連続発生が前記所定時間を待たずに途切れたときに「予期せぬ挙動」の不成立を判断する「予期せぬ挙動」確定判断手段を備え、前記記憶制御手段が、前記車両異常影響判断手段により前記「予期せぬ挙動」の発生原因が当該車両異常の影響であると判断されたときであっても、前記車両異常確定判断手段により車両異常不成立が判断されたときは、前記「予期せぬ挙動」確定判断手段により「予期せぬ挙動」確定が判断されたことを条件に前記挙動データは「予期せぬ挙動データ」として記憶し、前記「予期せぬ挙動」確定判断手段により「予期せぬ挙動」不成立が判断されたときには、前記車両異常影響判断手段及び前記車両異常確定判断手段の判断結果にかかわらず前記挙動データは記憶しない例外措置を行なうことを特徴とする。
【0012】
「予期せぬ挙動」は最初の発生判断で当該「予期せぬ挙動」と確定したものとして取り扱ってもほぼ支障はないが、実際には「予期せぬ挙動」判断の元となった挙動データが不安定であったり、ノイズ的なデータ情報であったりすることもある。
【0013】
上記請求項3によれば、「予期せぬ挙動」確定判断手段を設けたことにより、「予期せぬ挙動」が確定したか否かを判断できる。そして、記憶制御手段が、前記車両異常影響判断手段により前記「予期せぬ挙動」の発生原因が当該車両異常の影響であると判断されたときであっても、前記車両異常確定判断手段により車両異常不成立が判断されたときは、前記「予期せぬ挙動」確定判断手段により「予期せぬ挙動」確定が判断されたことを条件に前記挙動データは「予期せぬ挙動データ」として記憶し、前記「予期せぬ挙動」確定判断手段により「予期せぬ挙動」不成立が判断されたときには、前記車両異常影響判断手段及び前記車両異常確定判断手段の判断結果にかかわらず前記挙動データは記憶しない例外措置を行なうことで、「予期せぬ挙動」の確定・不成立、及び車両異常確定・不成立に応じて適正に挙動データの記憶、非記憶を実行できる。
【0014】
請求項4の車両の挙動データ記憶システムは、前記記憶装置が、さらに、前記挙動判断手段が「予期せぬ挙動」が発生したと判断した時点から前記車両異常情報が確定するまでの所要時間をフェイルカウンター値の変化率から予測する所要時間予測手段を備え、前記記憶制御手段が、当該予測した所要時間経過後に前記車両異常情報が確定したか否かを判断することを特徴とする。
この所要時間予測手段を設けることにより、「予期せぬ挙動」が発生したと判断して以降に、異常発生が途切れた、つまりフェイルカウンター値がリセットされたときには、「予期せぬ挙動」の発生原因が車両異常の影響ではない、と判断することができる。
【0015】
請求項5の車両の挙動データ記憶システムは、前記記憶制御手段が、挙動データを記憶する場合には、前記挙動判断手段が「予期せぬ挙動」の発生を判断したときの車両異常情報のフェイルカウンター値の大・小に応じて記憶する「予期せぬ挙動データ」の種類を夫々少なく・多く調整することを特徴とする。
【0016】
車両異常の影響が無いと判断された場合において、「予期せぬ挙動」の発生を判断した時点でのフェイルカウンター値が「車両異常発生なし」を示す場合であれば、車両異常の影響は真に無いと考えられるが、車両異常確定前であってもフェイルカウンター値が有意な値を示しているとすると、車両異常の影響は皆無でない可能性もある。この場合、当該フェイルカウンター値が大きいほど、車両異常検出から「予期せぬ挙動」検出までの時間的間隔が長くて、車両異常の影響は無いとは言い切れない。
【0017】
この点上記請求項5によれば、記憶制御手段が、「予期せぬ挙動」の発生を判断したときの車両異常情報のフェイルカウンター値の大・小に応じて記憶する「予期せぬ挙動データ」の種類を夫々少なく・多く調整するから、挙動データを記憶する場合には、車両異常との関連性の可能性を考慮して当該記憶する挙動データの種類を適正に変更できる。
【0018】
請求項6の車両の挙動データ記憶システムは、前記車両異常検出装置が、前記車両異常情報に、車両異常の種類を含み、前記記憶装置の車両異常影響判断手段が、前記車両異常の種類によって、前記所定タイミング条件である前記所定値以上を示すタイミングの当該所定値を変更することを特徴とする。
【0019】
車両異常の種類によっては、車両異常検出後、すぐにその影響がドライバの挙動つまり「予期せぬ挙動」として出るものと、ある程度時間がかかるものとがある。例えば前者の車両異常の種類としては、電子スロットルポジションセンサの断線やショート、あるいは回転数信号線断線といった車両異常が相当し、この場合、ドライバが直ぐに反応して急にアクセル操作をして急加速(「予期せぬ挙動」)したり、急にブレーキを踏み込んで急減速(「予期せぬ挙動」)を呈することが予測される。後者の車両異常の種類としては、例えばエンジン失火やABS異常などの車両異常が相当し、この場合、車両異常発生からドライバの反応する(急加速や急減速などの「予期せぬ挙動」をする)までの時間が相対的に遅くなる可能性がある。
上記請求項6によれば、車両異常の種類によって上記所定値を変更することで、判断タイミングを一律長くするために当該所定値を画一的な値とする場合と違って、「予期せぬ挙動」が車両異常の影響であるか否かの判断を精度良くすることができる。
【0020】
請求項7の車両の挙動データ記憶システムは、前記車両異常検出装置の前記車両異常情報と、前記記憶装置が取得する挙動データとには共通の時間情報が含まれ、且つ前記車両異常情報には、前記時間情報とフェイルカウンター値とが関連付けられており、前記記憶装置の前記車両異常影響判断手段が、前記挙動判断手段が「予期せぬ挙動」の発生を判断したときの挙動データの時間情報と一致する前記車両異常情報の時間情報から前記フェイルカウンター値を検出することを特徴とする。
【0021】
これによれば、「予期せぬ挙動」の発生を判断したときの挙動データの時間情報と一致する前記車両異常情報の時間情報から前記フェイルカウンター値を検出するから、「予期せぬ挙動」の発生を判断した時点と同時点のフェイルカウンター値を正確に検出することができ、「予期せぬ挙動」が車両異常の影響であるか否かの判断が正確となる。
【0022】
請求項8の車両の挙動データ記憶システムは、前記車両異常検出装置が、前記車両異常情報以外に、車両異常事後制御を実行中であることを示すフェイルセーフ制御中情報を前記車内ネットワーク上に送信可能であって、前記記憶装置の前記記憶制御手段は、前記挙動判断手段が「予期せぬ挙動」の発生を判断したとき、当該「予期せぬ挙動」の発生タイミングが、前記フェイルセーフ制御中情報取得タイミングと合致するときには、当該フェイルセーフ制御の種類を記憶することを特徴とする。
【0023】
車両異常の種類によっては、車両異常検出後、フェイルセーフ制御を行う場合がある。例えばABS用の異常検出装置では、ABS異常検出後(異常確定後)、ABSが作動しないように制御する。このフェイルセーフ制御中に「予期せぬ挙動」が判断されると、車両異常発生に引き続く当該フェイルセーフ制御の影響で当該「予期せぬ挙動」が発生したと考えられる。
【0024】
この場合、請求項8によれば、前記挙動判断手段が「予期せぬ挙動」の発生を判断したとき、当該「予期せぬ挙動」の発生タイミングが、前記フェイルセーフ制御中情報取得タイミングと合致するときには、前記記憶装置の前記記憶制御手段が、当該フェイルセーフ制御の種類を記憶する。挙動データではなく例外的に当該フェイルセーフ制御の種類を記憶決定することで、フェイルセーフ制御の影響の可能性があるところのフェイルセーフ制御の種類を記憶できる。
【0025】
請求項9の車両の挙動データ記憶システムは、前記車両異常検出装置が、記憶装置と一体の電子制御装置に組み込まれていることを特徴とする。この請求項9によれば、車内ネットワークが利用不能な状態であったとしても、前記請求項1ないし8のいずれか一項と同様の効果が得られる。
請求項10〜18の記憶装置は、前記請求項2〜9と同様の効果を奏する。
【図面の簡単な説明】
【0026】
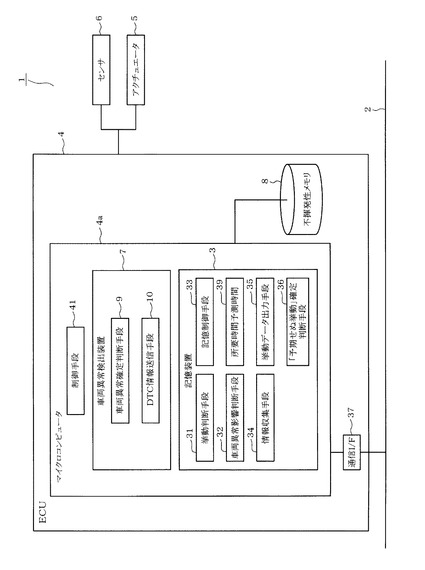
【図1】本発明の第1実施形態の車両の挙動データ記憶システムの機能ブロック図
【図2】車両異常検出装置の制御内容を示すフローチャート
【図3】記憶装置の制御内容を示すフローチャート
【図4】所要時間予測に関連する制御内容を示すフローチャート
【図5】(a)は確定状態まで移行する車両異常発生の様子を示し、(b)は車両異常確定判断方法を概念的に示す図
【図6】(a)は確定状態まで移行しない車両異常発生の様子を示し、(b)は車両異常不成立判断方法を概念的に示す図
【図7】F/S制御を概念的に示す図
【図8】FC値の推移及び「予期せぬ挙動」カウント値の推移の一例を示す図(その1)
【図9】FC値の推移及び「予期せぬ挙動」カウント値の推移の異なる例を示す図(その2)
【図10】同じくさらに異なる例を示す図(その3)
【図11】同じくさらに異なる例を示す図(その4)
【図12】同じくさらに異なる例を示す図(その5)
【図13】所要時間予測方法を概念的に示す図
【図14】(a)は確定状態まで移行する「予期せぬ挙動」発生の様子を示し、(b)は「予期せぬ挙動」確定判断方法を概念的に示す図
【図15】(a)は確定状態まで移行しない「予期せぬ挙動」発生の様子を示し、(b)は「予期せぬ挙動」不成立判断方法を概念的に示す図
【図16】具体的一例を説明するための、車両異常発生に伴うFC値の推移及び「予期せぬ挙動」カウント値の推移を示す図
【図17】第2実施形態を示す図3相当図
【図18】FC値区分を示す図
【図19】第3実施形態を示す図3相当図
【図20】DTC種類と所定値FCpとの関係を示す図
【図21】本発明の第4実施形態を示す図1相当図
【発明を実施するための形態】
【0027】
<第1実施形態>
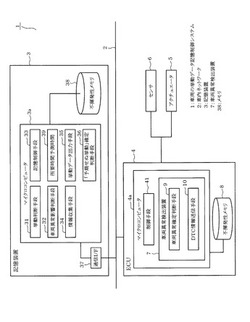
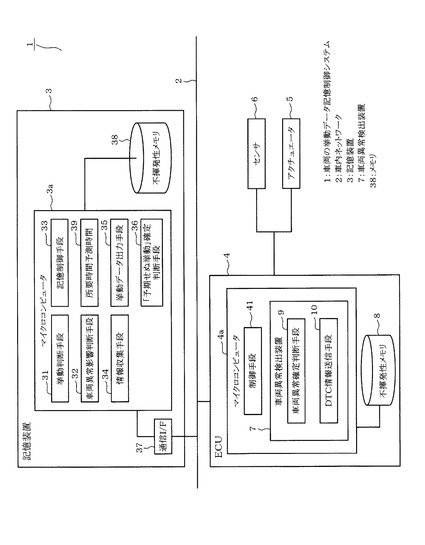
以下、本発明の第1実施形態について図1ないし図16を用いて説明する。第1実施形態の車両の挙動データ記憶制御システム1は、車内ネットワークである例えばCAN(Controller Area Network)バス2を介して、記憶装置3と、電子制御装置である例えばECU(electronic control unit)4が接続されている。このECU4には、それぞれアクチュエータ5、センサ6、信号線などが接続されており、ECU4は、CPU、ROM、RAMを有するマイクロコンピュータ4aを備えており、このマイクロコンピュータ4aにより、前記センサ6などの入力に応じて、自身が担う制御対象(アクチュエータ5)を制御する制御手段41を構成している。さらに、このECU4は、マイクロコンピュータ4aの自己故障診断機能から構成される車両異常検出装置7を備え、さらに不揮発性メモリ8を備えている。
【0028】
前記CANバス2に接続されているECUは、エンジンECU、変速機ECU、ABS(Antilock Brake System)・ECU、カーナビECU、メーターECU、エアコンECUなど、複数有る。ただし、これら複数のECUをCANバス2上に記載すると図面が煩雑となるため、便宜上、上記ECU4は、これらECUを総合的に含んでいるものとして示している。なお、ECU4に接続されるアクチュエータ5等は1つでなく複数の場合もある。
【0029】
ECU4は、センサ6からの検出信号に基づいて、アクチュエータ5に制御信号を供給して駆動することで、各自が担う所望の制御を実行している。そして、ECU4の車両異常検出装置7が、アクチュエータ5又はセンサ6の無応答や車両情報の異常値に基づき異常を検出した場合、あるいは信号線断線などを検出した場合、この車両異常(以下、DTCという(DTC:Diagnostic Trouble Code))情報をCANバス2上に送信し、且つこのDTC情報をECU4が不揮発性メモリ8に記憶する。このDTC情報には、各ECUごとに当該車両異常の種類とフェイルカウンター値(以下FC値)とを含んでいる。
さらに、前記車両異常検出装置7は、それぞれ前記マイクロコンピュータ4aのソフトウエアによって構成される車両異常確定判断手段9と、DTC情報送信手段10とを有している。
【0030】
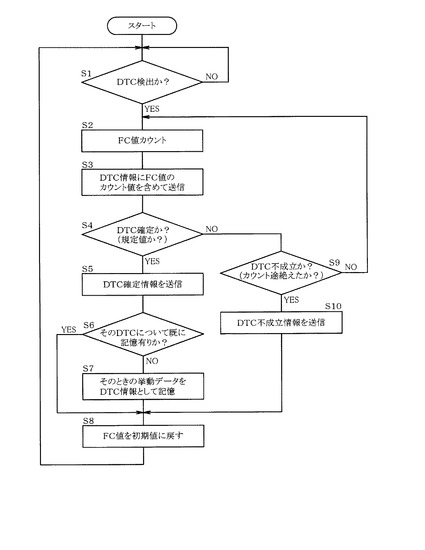
上記車両異常検出装置7における制御内容を図2を用いて説明する。
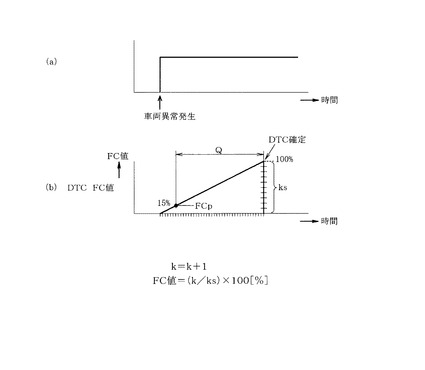
ステップS1で、自己故障診断機能によりDTCを検出すると、ステップS2で、DTC発生(最初の検出)からDTC確定までの段階を示すための前記FC値をカウントする。そして、ステップS3で、当該FC値のカウント値をDTC情報と共にCANバス2上に送信する(DTC情報送信手段10)。このFC値は、図5に示すように、車両異常発生があると、次の単位時間当たりで車両異常発生があることが連続する都度、変数kをk+1としてゆき、FC値を(k/ks)×100[%]で求める。ksはこの変数kの100%設定値である。
【0031】
図5で示すように、前記DTC発生以後、当該異常発生が連続することを条件に当該FC値(百分率で示される)を初期値(例えば0%)から順次増加し(前記ステップS2)、このFC値が予め設定された規定値(100%)まで増加したときに車両異常確定(DTC確定)を判断して(車両異常確定判断手段9)、ステップS5で、DTC確定情報をCANバス2上に送信する。
【0032】
この後、ステップS6では、当該DTCについて既に不揮発性メモリ8に記憶されていないと判断されると、ステップS7でそのときの挙動データ(車両状態などを含む)を不揮発性メモリ8に記憶し、そして、ステップS8でFC値を初期値に戻し、この初期値情報をCANバス2に送信する(DTC情報送信手段10)。上記ステップS6、S7の趣旨は、1種類のDTCに対しては1回しか記憶しない、というものである。この結果、同じ種類のDTCが何度も検出されたとしても、DTC情報が記録されるのは最初の1回のみであり、メモリを無駄に使用することがない。
【0033】
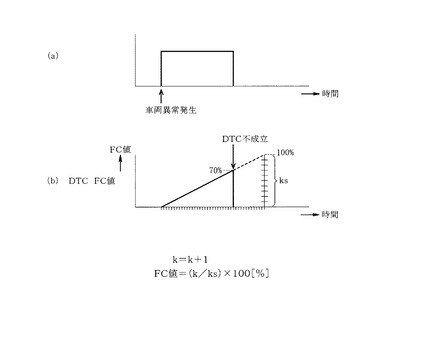
又、図6で示すようにDTC発生が途切れたときには、ステップS9で、車両異常不成立(DTC不成立)を判断して(車両異常確定判断手段9)、ステップS10で、当該DTC不成立情報をCANバス2に送信し、前述のステップS8で、FC値を初期値に戻し、この初期値情報をCANバス2に送信する(DTC情報送信手段10)。一方、ステップS9で、DTC発生が途絶えていないと判定されたときには、ステップS2へ戻りFC値のカウントを継続する。なお、ステップS1でDTCが発生していない、と判定している間は、その際のFC値(初期値)を定期的にCANバス2に送信するようにしても良い。
【0034】
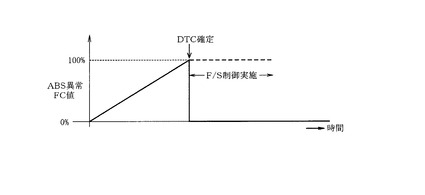
又、前記DTCの種類によっては、上記FC値が規定値である100%に達した(車両異常確定した)後に、車両異常事後制御をする機能を備えたものがあり、この場合、図7に示すように、当該車両異常事後制御を実行中であることを示すフェイルセーフ(以下F/Sという)制御中情報を前記CANバス2上に送信可能としている。
【0035】
前掲した図1において、前記記憶装置3は、CPU、ROM、RAM(いずれも図示せず)を備えたマイクロコンピュータ3aを備えて構成されており、このマイクロコンピュータ3aは通信インターフェース37を介して前記CANバス2に接続されている。このマイクロコンピュータ3aのソフトウエア構成によって構成される後述する挙動判断手段31、車両異常影響判断手段32、記憶制御手段33、情報収集手段34、挙動データ出力手段35、「予期せぬ挙動」確定判断手段36、所要時間予測手段39さらに当該マイクロコンピュータ3aに接続されたメモリとしての不揮発性メモリ38を含んで構成されている。この不揮発性メモリ38及び前記不揮発性メモリ8は、データ書き換え可能なフラッシュメモリなどから構成される。ここでいう「予期せぬ挙動」の一例としては、ドライバが急にアクセルを踏み込んで、増速率が当該記憶装置3が備えた所定条件を超えた場合をいう。
【0036】
この場合記憶装置3は、CANバス2から、車両の状態を示す最新の挙動データを逐次受け取ると共に、DTC情報も逐次受け取る。挙動データとしては、車両の挙動を示す各種車両情報や各種制御情報といったものをいう。そしてこの挙動データ及びDTC情報は前記CANバス2上から前記情報収集手段34を介して各種の挙動データを収集できるようになっている。
【0037】
ここで、ECU4からCANバス2に乗せられる挙動データとしては、エンジン水温、吸気管圧力、エンジン回転数、車速、点火時期(例えば、進角時期)、吸気温度、エアフロー率、スロットル開度、などがあり、これら以外にも種々の挙動データがある。
DTCとしては、回転信号系統異常、点火信号系統異常、エンジン失火異常、各センサー信号異常、燃料系統異常、メーター関係異常、などがあり、これら以外にも種々のDTCがある。
【0038】
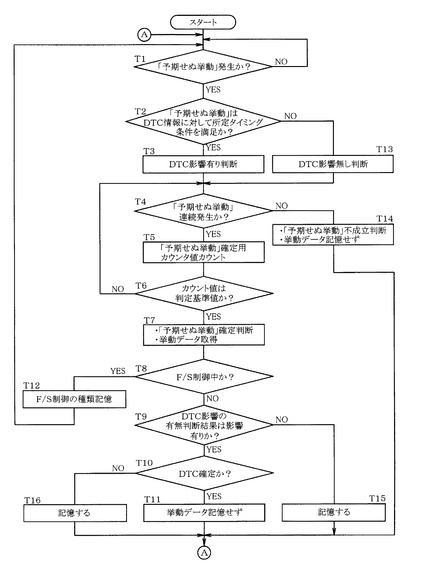
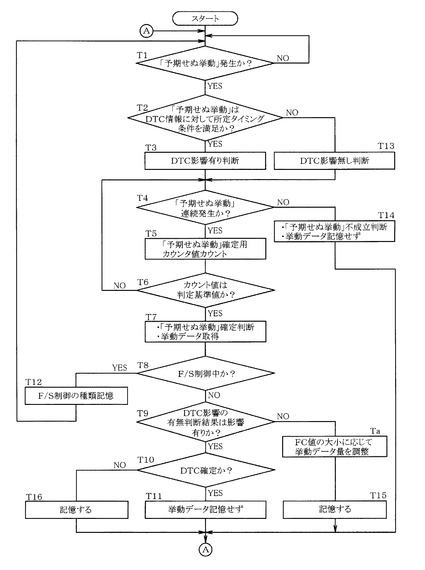
さて、前記記憶装置3の制御内容について図3を用いて説明する。
ステップT1では、「予期せぬ挙動」の発生を判断したか否かを判断し(挙動判断手段31)、発生したことが判断されると、ステップT2へ進む。
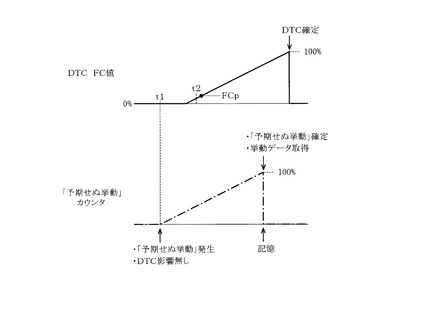
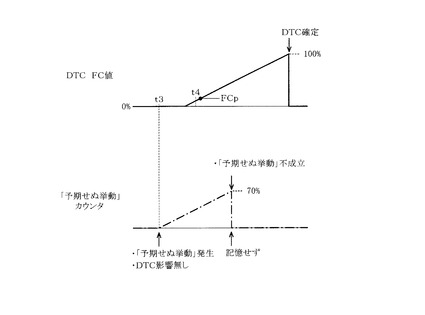
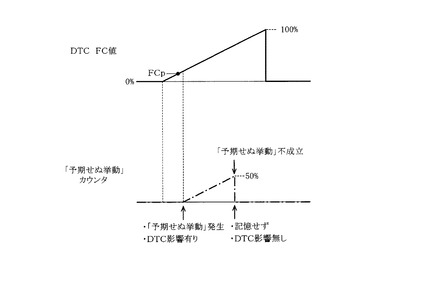
ステップT2では、「予期せぬ挙動」の発生タイミング(取得タイミング)が、取得したDTC情報の取得タイミングに対して所定タイミング条件を満足しているか否かを判断する(車両異常影響判断手段32)。この場合、この所定タイミング条件は、DTC情報のFC値が例えば所定値FCp(例えばこの場合「15(%)」)以上を示すタイミングQ(Q=15〜100%、図5(b)参照)に合致していること、である。なお、この所定値であるFC値の15%は、DTC発生から、これにドライバが反応して何らかの「予期せぬ挙動」をとるまでの時間を考慮して設定しており、DTCの種類などによってこの所定値は変更可能である。DTC発生からドライバが「予期せぬ挙動」をとるまでに極めて短いDTCの場合には、極端であるが所定値をFC値で1%としても良い。
【0039】
上述のステップT2で、「予期せぬ挙動」の発生タイミングが、図8及び図9に示すように、所定値FCp未満(15%未満)のタイミング(例えばタイミングt1、t2、t3、t4)であるときには、ステップT13で、当該「予期せぬ挙動」の発生原因が当該車両異常の影響でない(DTC影響無し)と判断する(車両異常影響判断手段32)。
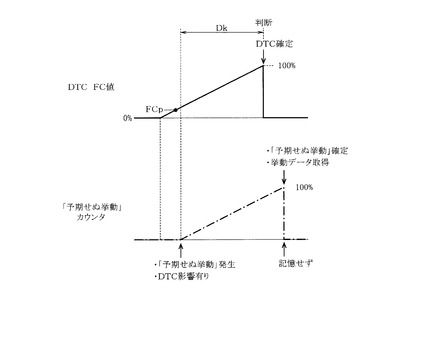
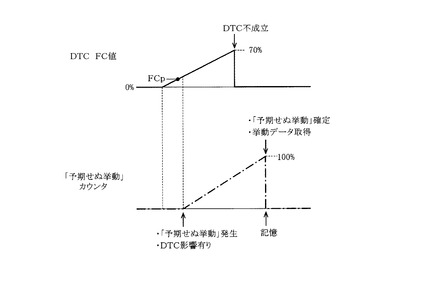
又、上述のステップT2で、「予期せぬ挙動」の発生タイミングが図10〜図12に示すように、所定値FCp以上であると、ステップT3で、当該「予期せぬ挙動」の発生原因が当該車両異常の影響である(DTC影響有り)と判断する(車両異常影響判断手段32)。
【0040】
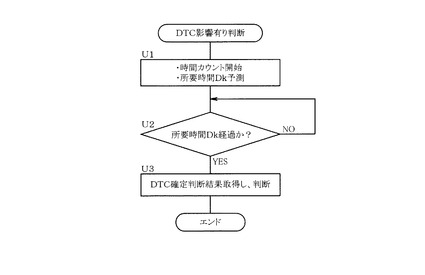
ここで、上記ステップT3でDTC影響有りと判断されることに基づいて別ルーチンで、図4のDTC確定判断結果の取得のための制御を実行する。
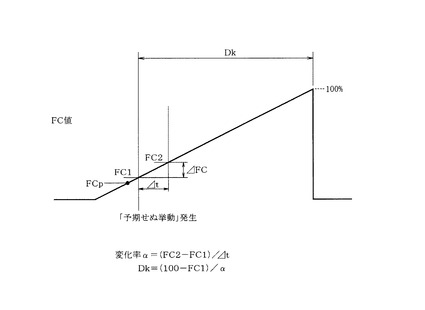
この図4において、ステップU1では、「予期せぬ挙動」が発生したと判断した時点から車両異常検出装置7の車両異常確定判断手段9においてDTCが確定するまでの所要時間Dk(図13参照)をフェイルカウンター値の変化率から予測する(所要時間予測手段39)。すなわち、「予期せぬ挙動」発生時点のFC値をFC1とし、当該時点から微小単位時間Δt経過時点でのFC値をFC2とすると、変化率αは(FC2―FC1)/Δtとなる。
【0041】
従って、Dkは
Dk=(100−FC1)/α で求められる。この場合「予期せぬ挙動」発生時点で予め時間カウントは開始しておく。そして、ステップU2で、上記所要時間Dkが経過するのを待って、ステップU3でDTC確定判断結果をCANバス2から取得し、DTC確定かDTC不成立かを判断する。なお、この所要時間Dkは、上記計算値よりも僅かに長くするのが好ましい。
【0042】
図3に戻り、前記ステップT3に続くステップT4では、前記「予期せぬ挙動」が連続して発生しているか否かを判断する。この連続検出が判断されると、ステップT5で「予期せぬ挙動」確定用カウンタ値Yp[%]をカウントする。
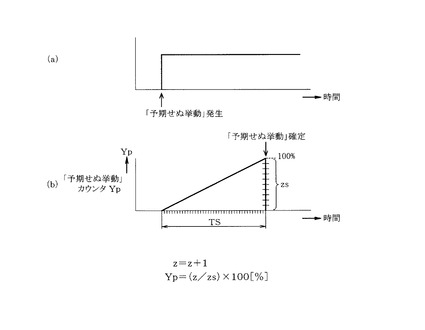
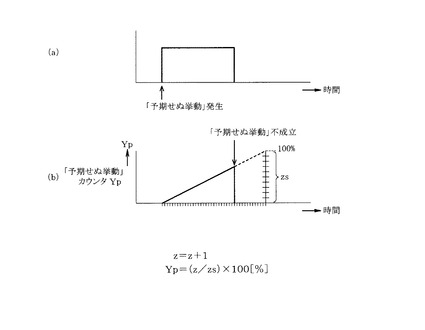
この「予期せぬ挙動」確定用カウンタ値Ypは、前記FC値と同様の算出方法で求める。すなわち、図14、図15に示すように、「予期せぬ挙動」発生が連続する都度、変数zをz+1としてゆき、「予期せぬ挙動」確定用カウンタ値Ypを(z/zs)×100[%]で求める。zsはこの変数zの100%設定値である。
【0043】
そしてステップT6で、「予期せぬ挙動」確定用カウンタ値Ypが基準値である100%に達したか否かを判断する。このステップT6で判定基準値に未だ達していないと判断されると、ステップT4に戻る。上記ステップT6で「予期せぬ挙動」確定用カウンタ値Ypが判定基準値である100%に達した(「予期せぬ挙動」の発生が連続して所定時間(図14の符号TS参照)継続した)ことが判断されると、ステップT7で、これをもって「予期せぬ挙動」が確定したと判断し(「予期せぬ挙動」確定判断手段36)、CANバス2から挙動データを取得する。なお、この挙動データの取得タイミングは、最初の「予期せぬ挙動」発生時でも良い。
【0044】
又、前記ステップT4で、「予期せぬ挙動」の連続発生判断で否(「予期せぬ挙動」の発生が判定基準値(所定時間TS)を待たずに途切れた)と判断されたときには、ステップT14に移行して「予期せぬ挙動」不成立と判断する(「予期せぬ挙動」確定判断手段36)と共に、挙動データを記憶せず、「予期せぬ挙動」確定用カウンタ値Ypをクリア(=0)する。なお、この「挙動データを記憶しない」は、前記車両異常影響判断手段32及び前記車両異常確定判断手段9の判断結果にかかわらず挙動データは記憶しない例外措置に相当する。図12がこのケースに相当する。
前記ステップT7に続くステップT8では、F/S制御中か否かを判断し、F/S制御中であることが判断されると、ステップT12で、F/S制御の種類を不揮発性メモリ38に記憶し、ステップT1に戻る。
【0045】
一方で、ステップT8でF/S制御中でないと判断されると、ステップT9に進む。このステップT9では、前記車両異常影響判断手段32の判断結果が、ステップT3のDTC影響有りであったか否か(ステップT13のDTC影響無しであったか)を判断し、影響無しであれば、ステップT15で、ステップT7において取得した挙動データを「予期せぬ挙動データ」として不揮発性メモリ38に記憶する(記憶制御手段33)。
【0046】
又、前記ステップT9で、DTC影響有りが判断されると、ステップT10で、CANバス2からDTC確定・不成立の判断結果(図4のステップU3で取得)が確定であるか否かを判断し、DTC確定であれば、ステップT11で挙動データは記憶しない(記憶制御手段33)。又、前記ステップT10でDTC不成立と判断されると(図11のケースがこれに相当する)、ステップT16で「予期せぬ挙動データ」として不揮発性メモリ38に記憶する例外措置を実行する。
【0047】
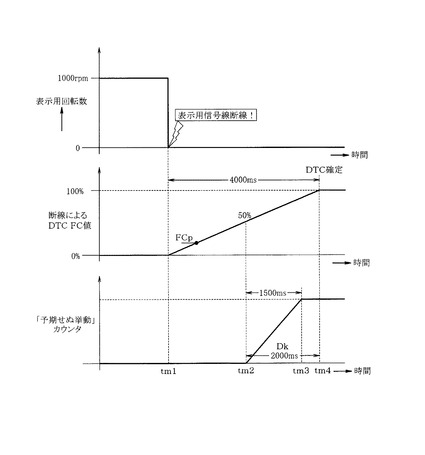
なお、記憶装置3の制御内容を具体的一例を挙げて、図16を用いて説明する。エンジン回転数表示用の信号線がタイミングtm1で断線すると、回転数表示メーターに表示回転数例えば1000rpmを示していた状態から、いきなり、0rpmとなり、メーターECUがこの断線に関連するDTCを検出し、FC値をカウントし、送信する(図2のステップS1〜ステップS3)。ここで、ドライバは上記表示されていた回転数が0rpmとなったことで、動揺してアクセルを踏んでしまった場合、タイミングtm2で「予期せぬ挙動」の発生が判断される(図3のステップT1の「YES」)。このとき、F/S制御中ではなく、DTCのFC値は50%であって、所定値FCpを超えているから、DTC影響有りと判断する(ステップT2の「YES」、ステップT3)。これと同時に、「予期せぬ挙動」カウント値のカウントを前もって開始すると共に、DTCが確定するまでの所要時間Dkを予測する(ステップU1)。この場合、2000msと予測される。
【0048】
そして、タイミングtm3で「予期せぬ挙動」確定が判断され(ステップT7)、そしてタイミングtm4(前記所要時間Dk経過時点)でDTC確定か不成立かを判断し(ステップT10)、この場合、DTC確定が判断される。これにより、挙動データは記憶されない(ステップT11)。
【0049】
上述実施形態によれば、記憶装置3は、CANバス2から、挙動データ及びDTC情報を取得し、当該記憶装置3の挙動判断手段31が前記挙動データに基づいて「予期せぬ挙動」の発生を判断したとき、車両異常影響判断手段32が、当該「予期せぬ挙動」の発生タイミングが、取得したDTC情報の当該取得タイミングに対して所定タイミング条件つまり時間的に後であること示す所定値FCp以上を満足するか否かを判断する。そして、この所定タイミング条件を満足する判断の場合、当該「予期せぬ挙動」の発生原因が当該車両異常の影響であると判断する。この判断がなされた場合には(ステップT9)、DTC確定を条件に(ステップT10の「YES」)、記憶制御手段33は、不揮発性メモリ38に当該「予期せぬ挙動」に関連する挙動データは記憶しない(ステップT11)。なお、DTC発生後、確実にDTCが確定する種類のDTCであれば、上記ステップT10の判断は不要である。
【0050】
一方、前記所定タイミング条件を満足しないタイミングであるときには、車両異常影響判断手段32は当該「予期せぬ挙動」の発生原因が当該車両異常の影響でないと判断する。そしてこの判断の場合(ステップT9の「NO」)は、記憶制御手段33が当該「予期せぬ挙動」に関連する挙動データを「予期せぬ挙動データ」として前記不揮発性メモリ38に記憶する(ステップT15)。
【0051】
よって、前記不揮発性メモリ38内には、原因が特定し難い「予期せぬ挙動」のみが記憶されることとなり、メモリを有効に活用することができる。また、合わせて前記不揮発性メモリ38内には、解析に適した挙動データのみが記憶されることとなり、「予期せぬ挙動」の解析を適正に行うことも可能となる。
【0052】
ここで車両異常検出装置7がDTCを検出した場合、このDTCが、なんらかの原因(例えばセンサ信号に外乱ノイズが乗るなど)で一時的に発生し、すぐに消失することがあり、つまり、DTCとして確定していないこともある。このため、上記実施形態において、車両異常検出装置7がFC値をもってDTC確定、不成立を判断することは、記憶装置3側で真のDTCを取り扱うことができるという点から意義がある。又、このFC値をもってDTCの発生から確定までの時間的段階、つまり、このFC値から、「予期せぬ挙動」発生タイミングに対するDTCタイミングの時間的関係も判る。つまり、上記実施形態において、挙動判断手段31が「予期せぬ挙動」の発生を判断したとき、当該「予期せぬ挙動」の発生タイミングが、前記所定タイミング条件である前記FC値が所定値FCp以上を示すタイミングであるときには、当該FC値をもってDTCが発生した後に「予期せぬ挙動」が発生したことと見なすことができる。この結果、FC値をもって、当該「予期せぬ挙動」の発生原因が当該DTCの影響であるか否かを判断でき、判断処理が容易且つ迅速となる。
【0053】
ここで、前記「予期せぬ挙動」確定判断手段36の技術的意義は次にある。すなわち、「予期せぬ挙動」は最初の発生判断で当該「予期せぬ挙動」と確定したものとして取り扱ってもほぼ支障はないが、実際には「予期せぬ挙動」判断の元となった挙動データが不安定であったり、ノイズ的なデータ情報であったりすることもある。
そこで、上述した「予期せぬ挙動」確定判断手段36を設けて、「予期せぬ挙動」が最終的に確定したか否かを判断することは、真の「予期せぬ挙動」を判断できることになる。
又、車両異常検出装置7における車両異常確定判断手段9の技術的意義も「予期せぬ挙動」確定判断手段36と同様の考え方であり、最初に検出したDTCが不安定であったり、ノイズ的なデータ情報からのDTCであったりするので、この車両異常確定判断手段9によりDTCが最終的に確定したか否かを判断することは、真のDTCを判断できることになる。
【0054】
そして、この実施形態では、この「予期せぬ挙動」確定判断手段36と、車両異常確定判断手段9とに基づいて、例外措置を実行するため、「予期せぬ挙動」又はDTCが一時的であった場合における記憶制御を補正できる。すなわち、記憶制御手段33が、車両異常影響判断手段32により前記「予期せぬ挙動」の発生原因が当該車両異常の影響であると判断されたときであっても、車両異常確定判断手段9により車両異常不成立が判断されたときは、「予期せぬ挙動」確定判断手段36により「予期せぬ挙動」確定が判断されたことを条件に挙動データは「予期せぬ挙動データ」として記憶し、「予期せぬ挙動」確定判断手段36により「予期せぬ挙動」不成立が判断されたときには、車両異常影響判断手段32及び車両異常確定判断手段9の判断結果にかかわらず挙動データは記憶しない例外措置を行なうため、「予期せぬ挙動」の確定・不成立、及び車両異常確定・不成立に応じて適正に挙動データの記憶、非記憶を実行(記憶制御の補正)でき、よって、不揮発性メモリ38内を有効に活用するとともに、さらに解析に適した挙動データのみを記憶できる。
【0055】
又、上記実施形態においては、記憶装置3が、挙動判断手段31が「予期せぬ挙動」が発生したと判断した時点からDTC情報が確定するまでの所要時間DkをFC値の変化率から予測する所要時間予測手段39を備え、記憶制御手段33が、当該予測した所要時間Dk経過後にDTC情報が確定したか否かを判断する構成とした。このように構成した趣旨は次にある。
【0056】
図1で示したように、DTC確定情報は車両異常検出装置7によりCANバス2に送信される。すなわち記憶装置3側では、車両異常検出装置7により送信されたDTC確定情報が、挙動判断手段31が「予期せぬ挙動」が発生したと判断した時点から一度もDTCが不成立になることなくFC値がカウントアップされ続けてDTC確定されたものである(パターン1)のか、「予期せぬ挙動」が発生したと判断した時点から少なくとも1回DTCが不成立になってFC値が初期化された後、再びDTCが成立し続けてDTC確定されたものである(パターン2)のか、を判別していない。
【0057】
この点を考慮した上記構成によれば、所要時間予測手段39が、挙動判断手段31が「予期せぬ挙動」が発生したと判断した時点からDTC確定・不成立の判断結果を取得できる所要時間DkをFC値の変化率から予測することで、上記所要時間Dkを適正に予測でき、そして、当該予測した所要時間Dk経過後にDTCが確定したか否かを判断するので、パターン2のような場合には「予期せぬ挙動データ」を記憶し、パターン1のような場合には「予期せぬ挙動データ」を記憶しない、ようにできる。
【0058】
また、先ほど説明したとおり、車両異常情報が確定したか不成立となったかの判断結果は、車両異常検出装置7がCANバス2に送信するものであるから、記憶装置3では、DTC情報取得時点では、いつ、DTC確定・不成立判断結果を取得するか判らない。このため確実にDTC確定・不成立判断結果の取得を待って当該結果を記憶装置3で判断するには、記憶装置3は、前記結果の取得が予想できる時間を見計らって、当該結果を判断することが考えられる。しかし判断実行について確実を期すには、この判断タイミングは、DTC情報取得時点からかなりの余裕をもった長めの時間に設定することとなる。しかしこれでは、DTC情報の種類によっては早くDTC確定・不成立判断結果が出る場合もあり、DTC確定・不成立判断結果の判断タイミングがかなり遅れることになってしまう。しかし、前述したように上記FC値の初期の変化状況(例えば増加率)を検出すれば、記憶装置3側で、ある程度、車両異常確定・不成立の判断結果が出るまでの所要時間を予測することが可能となり、ひいてはDTC確定のタイミングから遅延することなく「予期せぬ挙動」であるか否かの確定を行うことができる、という効果も合わせて奏することができる。
【0059】
又、上記実施形態においては、「予期せぬ挙動」の発生タイミングが、F/S制御中情報取得タイミングと合致するときには、当該F/S制御の種類を記憶するようにした。この趣旨は次にある。すなわち、車両異常検出装置7の種類(ECUの種類)によっては、DTC検出後、F/S制御を行う場合がある。例えばABS用の異常検出装置では、ABS異常検出後(異常確定後)、ABSが作動しないように制御する。このF/S制御中に「予期せぬ挙動」が判断されると、車両異常発生に引き続く当該F/S制御の影響で当該「予期せぬ挙動」が発生したと考えられる。
【0060】
この場合、上述したように、「予期せぬ挙動」の発生を判断したとき、当該「予期せぬ挙動」の発生タイミングが、F/S制御中情報取得タイミングと合致するときには、記憶装置3の記憶制御手段33が、当該F/S制御の種類を記憶するから、挙動データではなく例外的に当該F/S制御の種類を記憶決定することで、F/S制御の影響の可能性があるところのF/S制御の種類を記憶できる。
又、この実施形態においては、車両異常検出装置7を、CANバス2に接続されて予め決められた制御対象を制御するECU(電子制御装置)に組み込んだから、当該CANバス2接続構成を簡単化できる。
【0061】
<第2実施形態>
図17は第2実施形態を示している。この第2実施形態においては、ステップT15の直前にステップTaを追加した点が、第1実施形態と異なる。すなわち、ステップT15では、記憶制御手段33が挙動データを記憶する。そして、このステップT15直前のステップTaでは、「予期せぬ挙動」発生タイミングでのDTCのFC値の大小に応じて記憶する「予期せぬ挙動データ」の種類を調整している。
【0062】
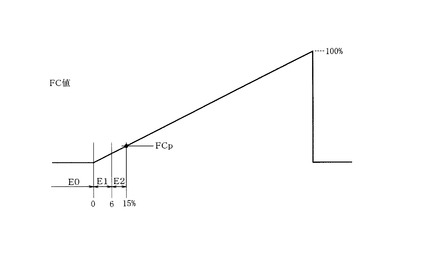
つまり、例えば、「予期せぬ挙動」の発生時点が、図18において、FC値「0%」のタイミングE0である場合と、「1%〜6%未満」のタイミングE1である場合と、「6%超〜15%未満」のタイミングE2である場合とでは、ステップT15で記憶する挙動データの種類を、その順に少なくするように調整する。
【0063】
この調整の趣旨は次にある。すなわち、ステップT9でDTC影響が無いと判断された場合において、「予期せぬ挙動」の発生を判断した時点でのFC値が0%(DTC検出なし)であれば、DTC影響は真に無いと考えられるが、FC値が0%以外のある値を示した(例えば1%〜15%未満)とすると、DTCの影響は皆無でない可能性もある。この場合、当該FC値が大きいほど、DTC検出から「予期せぬ挙動」検出までの時間的間隔が長くて、DTCの影響は無いとは言い切れない。そこで、この第2実施形態では、記憶制御手段33が、「予期せぬ挙動」の発生を判断したときのDTC情報のFC値の大・小に応じて記憶する「予期せぬ挙動データ」の種類を夫々少なく・多く調整するので、挙動データを記憶する場合には、DTCとの関連性の可能性を考慮して当該記憶する挙動データの種類を適正に変更できる。この場合、FC値の大・小の境界値は上述の6%に限るものではない。また、FC値の大・小の分け方も3通りでなく、複数段階で分けるようにしても良い。
【0064】
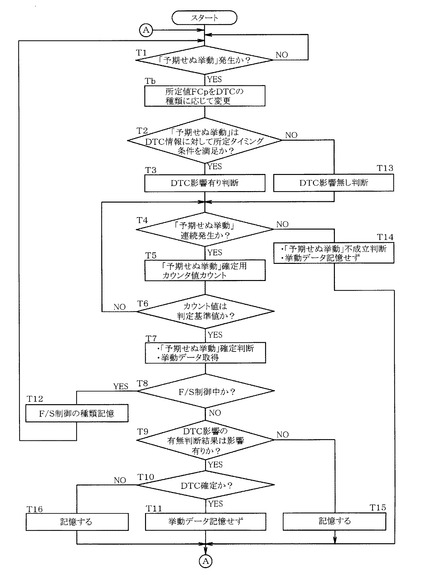
<第3実施形態>
図19、図20には第3実施形態を示している。図19は第1実施形態の図3に相当し、図3のステップT2の直前にステップTbを追加した点が異なる。この実施形態は、次の点を考慮したものである。すなわち、DTCの種類によっては、DTC検出後、すぐにその影響がドライバの挙動つまり「予期せぬ挙動」として出るものと、ある程度時間がかかるものとがある。例えば前者のDTCの種類としては、電子スロットルポジションセンサの断線やショート、あるいは回転数信号線断線といったDTCが相当し、この場合、ドライバが直ぐに反応して急にアクセル操作をして急加速(「予期せぬ挙動」)したり、急にブレーキを踏み込んで急減速(「予期せぬ挙動」)を呈することが予測される。後者のDTCの種類としては、例えばエンジン失火やABS異常などのDTCが相当し、この場合、DTC発生からドライバの反応する(急加速や急減速などの「予期せぬ挙動」をする)までの時間が相対的に遅くなる可能性がある。
【0065】
この点を考慮した第3実施形態においては、図19のステップTbにおいて、DTCの種類によって、所定タイミング条件である前記所定値FCp以上を示すタイミングの当該所定値FCpを変更する。この変更パターンは、図20に示すように、多種類のDTCを例えば第1群と、第2群と、第3群とに分けている。第1群のDTCは、ドライバがすぐに反応するDTC、第2群のDTCは、ドライバの反応時間が普通(相対的に中間)のDTC、第3群はドライバの反応時間がやや遅いDTCである。そして、DTCの種類が第1群に属する場合には所定値FCpを例えば2%、同じく第2群の場合は15%、第3群の場合は50%に設定(変更)する。なお、上記2%、15%、50%といった設定値はこれに限るものではない。又、DTCの分類の数も3つに限るものではなく、各DTC個々に所定値FCpを変更しても良い。
【0066】
上述した第2実施形態によれば、DTCの種類によって上記所定値FCpを変更することで、当該所定値を画一的な値とする場合と違って、「予期せぬ挙動」がDTCの影響であるか否かの判断を、DTCの種類によっては正確に実施することができる。また、その判断を早くすることもできる。
【0067】
<第4実施形態>
図21には、本発明の第4実施形態を示している。この第4の実施形態においては、CANバス2に接続されるECU4に記憶装置3を設けた構成としている。これによれば、ECU4にて記憶装置3を兼用できる。この場合、不揮発性メモリ8は第1実施形態の不揮発性メモリ38も含むものであり、不揮発性メモリ8は記憶装置3でも使用する。
【0068】
<その他の実施形態>
前述した第1実施形態では、「予期せぬ挙動」の発生タイミングと、取得した車両異常情報の取得タイミングでのFC値とで、DTC影響が有るか否かを判断するようにしたが、車両異常検出装置7の車両異常情報と、記憶装置3が取得する挙動データとには共通の時間情報を含むようにし、且つ前記車両異常情報には、前記時間情報とFC値とを関連付けるようにし、記憶装置3の車両異常影響判断手段32が、挙動判断手段31が「予期せぬ挙動」の発生を判断したときの挙動データの時間情報と一致する前記車両異常情報の時間情報から前記FC値を検出するようにしても良い(請求項7)。
【0069】
これによれば、「予期せぬ挙動」の発生を判断したときの挙動データの時間情報と一致する前記車両異常情報の時間情報から前記FC値を検出するから、「予期せぬ挙動」の発生を判断した時点と同時点のFC値を正確に検出することができ、「予期せぬ挙動」が車両異常の影響であるか否かの判断が正確となる。
又、前述した各実施形態では、車両異常検出装置7を、既存のECUが備えた自己故障診断機能から構成したが、この車両異常検出装置7は、CANバス2上の各種データ、情報から、総合的に車両異常を検出する専用の装置であっても良い。
【0070】
なお、DTC確定情報をCANバス2上に送信するタイミングは、DTC確定した以降も定期的に送信するようにしても良い。
また、図2のステップS5のDTC確定情報の送信、及び、ステップS10のDTC不成立情報の送信は、DTC確定情報又はDTC不成立情報にその判断を行った時刻を示すタイムスタンプを付与して、定期的に送信するようにしても良い。このようにすれば、通信エラーが発生してステップS5又はステップS10において送信されたDTC確定情報又はDTC不成立情報が正常に送受信されなかったとしても、記憶装置3はその後の定期的なタイミングにおいて送信されたDTC確定情報又はDTC不成立情報を使うことで、「予期せぬ挙動」がDTCの影響を受けたものであるかの判定をすることができる。
【符号の説明】
【0071】
図面中、1は車両の挙動データ記憶制御システム、2はCANバス(車内ネットワーク)、3は記憶装置、4はECU(電子制御装置)、7は車両異常検出装置、9は車両異常確定判定手段、10はフェイルカウンター値送信手段、31は挙動判断手段、32は車両異常影響判断手段、33は記憶制御手段、36は「予期せぬ挙動」確定判断手段、38は不揮発性メモリ(メモリ)、39は所要時間予測手段を示す。
【技術分野】
【0001】
本発明は、「予期せぬ挙動データ」を記憶する車両の挙動データ記憶制御システム及び記憶装置に関する。
【背景技術】
【0002】
従来、車両においては、異常挙動を検出したときにその際の車両の挙動を示す車両情報や制御情報といった挙動データを、事後の解析用としてメモリに記憶する技術がある(例えば特許文献1)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−185676号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、前記記憶装置のみで挙動データが所定条件を満たした際に異常挙動(原因が特定しにくい挙動)として判定する構成では、異常挙動と判定される原因となった挙動データが、車両異常の影響でドライバが異常行動をとった結果の挙動データである場合には、原因が明確であるにもかかわらず、異常挙動(「予期せぬ挙動」)の原因である「予期せぬ挙動データ」としてメモリに記憶されてしまう。一具体例としては、加速度が所定値以上となることを記憶装置が異常挙動と判定する条件とし、回転メーターが故障して回転数ゼロを示した場合にドライバがこの回転数ゼロを見て思わずアクセルを踏み込んで加速度が所定値以上となった場合、この加速度が急上昇した挙動は、回転メーター故障の影響によるものであるにもかかわらず、原因が不明の「予期せぬ挙動」として判断すると考えられる。しかしながら、メモリの記憶容量は有限であるため車両異常の影響による挙動データも記憶してしまうと、本来記憶すべき「予期せぬ挙動」(原因が特定し難い挙動)を記憶するための容量が減ってしまう可能性が考えられる。
【0005】
そこで、本発明は、「予期せぬ挙動」であるか否かの判定精度を向上させることを目的とする。
【課題を解決するための手段】
【0006】
本発明は、次の点を考慮してなされている。車両異常が発生すると、これに反応したドライバが異常挙動をとることがある。この場合の異常挙動は本来記憶したい「予期せぬ挙動」ではないが、判定条件を満足すれば、「予期せぬ挙動」として判断することになる。このような場合、記憶装置が取得する車両異常情報と「予期せぬ挙動」との時間的関係は、車両異常情報を取得した後、「予期せぬ挙動」を判断することになる。
【0007】
従って、記憶装置が逐次取得している挙動データに基づいて「予期せぬ挙動」が発生したとして判定した場合に、その発生タイミングが車両機器異常情報の取得タイミングに対して所定条件例えば当該車両機器異常情報の取得タイミングより後という条件を満足すれば、当該「予期せぬ挙動」は車両異常の影響であると判断できる。
【0008】
この点に着目した請求項1の車両の挙動データ記憶システムにおいては、記憶装置は、車内ネットワークから、挙動データ及び車両異常情報を取得する。記憶装置の挙動判断手段が取得した挙動データに基づいて「予期せぬ挙動」の発生を判断したとき、車両異常影響判断手段が、当該「予期せぬ挙動」の発生タイミングが、取得した車両異常情報の当該取得タイミングに対して所定タイミング条件例えば時間的に後であることを満足するか否かを判断する。そして、この所定タイミング条件を満足する判断の場合、当該「予期せぬ挙動」の発生原因が当該車両異常の影響であると判断する。この場合には、記憶制御手段は、前記メモリに当該「予期せぬ挙動」に関連する挙動データは記憶しない。一方、前記所定タイミング条件を満足しないタイミングであるときには、車両異常影響判断手段は当該「予期せぬ挙動」の発生原因が当該車両異常の影響でないと判断する。そしてこの判断の場合は、記憶制御手段が当該「予期せぬ挙動」に関連する挙動データを「予期せぬ挙動データ」として前記メモリに記憶する。
【0009】
よって、「予期せぬ挙動」であるか否かの判定精度を向上させることができ、ひいては前記メモリの記憶容量を有効に使用することが可能となる。
請求項2の車両の挙動データ記憶システムは、前記車両異常検出装置が、車両異常発生から車両異常確定までの段階を示すフェイルカウンター値を有し、前記車両異常発生以後、当該異常発生が連続することを条件に当該フェイルカウンター値を初期値から増加し、このフェイルカウンター値が規定値まで増加されたときに車両異常確定を判断してフェイルカウンター値を初期値に戻し、異常発生が途切れたときに車両異常不成立を判断してフェイルカウンター値を初期値に戻す車両異常確定判断手段と、当該フェイルカウンター値、車両異常確定情報、車両異常不成立情報を車両異常情報に付帯させて前記車内ネットワーク上に送信するフェイルカウンター値送信手段とを有し、前記記憶装置の前記車両異常影響判断手段において、前記「予期せぬ挙動」の発生原因が当該車両異常の影響であると判断する前記所定タイミング条件は、前記フェイルカウンター値が所定値以上を示すタイミングであることを特徴とする。
【0010】
車両異常検出装置が車両異常を検出した場合、この車両異常が、なんらかの原因(例えばセンサ信号に外乱ノイズが乗るなど)で一時的に発生し、すぐに消失することがあり、つまり、車両異常として確定していないこともある。このため、上記請求項2において、車両異常検出装置がフェイルカウンター値をもって車両異常確定、不成立を判断することは、記憶装置側で真の車両異常を取り扱うことができるという点から意義がある。又、このフェイルカウンター値をもって車両異常の発生から確定までの時間的段階、つまり、このフェイルカウンター値から、「予期せぬ挙動」発生タイミングに対する車両異常発生タイミングの時間的関係も判る。つまり、上記請求項2において、挙動判断手段が「予期せぬ挙動」の発生を判断したとき、当該「予期せぬ挙動」の発生タイミングが、前記所定タイミング条件である前記フェイルカウンター値が所定値以上を示すタイミングであるときには、当該フェイルカウンター値をもって車両異常が発生した後に「予期せぬ挙動」が発生したことと見なすことができる。つまり、フェイルカウンター値をもって、当該「予期せぬ挙動」の発生原因が当該車両異常の影響であるか否かを判断でき、判断処理が容易且つ迅速となる。
【0011】
請求項3の車両の挙動データ記憶システムは、前記記憶装置が、さらに、前記挙動判断手段が取得した挙動データに基づいて「予期せぬ挙動」が発生したと判断した後、当該「予期せぬ挙動」の発生が連続して所定時間継続されたことをもって当該「予期せぬ挙動」が確定したことを判断し、前記連続発生が前記所定時間を待たずに途切れたときに「予期せぬ挙動」の不成立を判断する「予期せぬ挙動」確定判断手段を備え、前記記憶制御手段が、前記車両異常影響判断手段により前記「予期せぬ挙動」の発生原因が当該車両異常の影響であると判断されたときであっても、前記車両異常確定判断手段により車両異常不成立が判断されたときは、前記「予期せぬ挙動」確定判断手段により「予期せぬ挙動」確定が判断されたことを条件に前記挙動データは「予期せぬ挙動データ」として記憶し、前記「予期せぬ挙動」確定判断手段により「予期せぬ挙動」不成立が判断されたときには、前記車両異常影響判断手段及び前記車両異常確定判断手段の判断結果にかかわらず前記挙動データは記憶しない例外措置を行なうことを特徴とする。
【0012】
「予期せぬ挙動」は最初の発生判断で当該「予期せぬ挙動」と確定したものとして取り扱ってもほぼ支障はないが、実際には「予期せぬ挙動」判断の元となった挙動データが不安定であったり、ノイズ的なデータ情報であったりすることもある。
【0013】
上記請求項3によれば、「予期せぬ挙動」確定判断手段を設けたことにより、「予期せぬ挙動」が確定したか否かを判断できる。そして、記憶制御手段が、前記車両異常影響判断手段により前記「予期せぬ挙動」の発生原因が当該車両異常の影響であると判断されたときであっても、前記車両異常確定判断手段により車両異常不成立が判断されたときは、前記「予期せぬ挙動」確定判断手段により「予期せぬ挙動」確定が判断されたことを条件に前記挙動データは「予期せぬ挙動データ」として記憶し、前記「予期せぬ挙動」確定判断手段により「予期せぬ挙動」不成立が判断されたときには、前記車両異常影響判断手段及び前記車両異常確定判断手段の判断結果にかかわらず前記挙動データは記憶しない例外措置を行なうことで、「予期せぬ挙動」の確定・不成立、及び車両異常確定・不成立に応じて適正に挙動データの記憶、非記憶を実行できる。
【0014】
請求項4の車両の挙動データ記憶システムは、前記記憶装置が、さらに、前記挙動判断手段が「予期せぬ挙動」が発生したと判断した時点から前記車両異常情報が確定するまでの所要時間をフェイルカウンター値の変化率から予測する所要時間予測手段を備え、前記記憶制御手段が、当該予測した所要時間経過後に前記車両異常情報が確定したか否かを判断することを特徴とする。
この所要時間予測手段を設けることにより、「予期せぬ挙動」が発生したと判断して以降に、異常発生が途切れた、つまりフェイルカウンター値がリセットされたときには、「予期せぬ挙動」の発生原因が車両異常の影響ではない、と判断することができる。
【0015】
請求項5の車両の挙動データ記憶システムは、前記記憶制御手段が、挙動データを記憶する場合には、前記挙動判断手段が「予期せぬ挙動」の発生を判断したときの車両異常情報のフェイルカウンター値の大・小に応じて記憶する「予期せぬ挙動データ」の種類を夫々少なく・多く調整することを特徴とする。
【0016】
車両異常の影響が無いと判断された場合において、「予期せぬ挙動」の発生を判断した時点でのフェイルカウンター値が「車両異常発生なし」を示す場合であれば、車両異常の影響は真に無いと考えられるが、車両異常確定前であってもフェイルカウンター値が有意な値を示しているとすると、車両異常の影響は皆無でない可能性もある。この場合、当該フェイルカウンター値が大きいほど、車両異常検出から「予期せぬ挙動」検出までの時間的間隔が長くて、車両異常の影響は無いとは言い切れない。
【0017】
この点上記請求項5によれば、記憶制御手段が、「予期せぬ挙動」の発生を判断したときの車両異常情報のフェイルカウンター値の大・小に応じて記憶する「予期せぬ挙動データ」の種類を夫々少なく・多く調整するから、挙動データを記憶する場合には、車両異常との関連性の可能性を考慮して当該記憶する挙動データの種類を適正に変更できる。
【0018】
請求項6の車両の挙動データ記憶システムは、前記車両異常検出装置が、前記車両異常情報に、車両異常の種類を含み、前記記憶装置の車両異常影響判断手段が、前記車両異常の種類によって、前記所定タイミング条件である前記所定値以上を示すタイミングの当該所定値を変更することを特徴とする。
【0019】
車両異常の種類によっては、車両異常検出後、すぐにその影響がドライバの挙動つまり「予期せぬ挙動」として出るものと、ある程度時間がかかるものとがある。例えば前者の車両異常の種類としては、電子スロットルポジションセンサの断線やショート、あるいは回転数信号線断線といった車両異常が相当し、この場合、ドライバが直ぐに反応して急にアクセル操作をして急加速(「予期せぬ挙動」)したり、急にブレーキを踏み込んで急減速(「予期せぬ挙動」)を呈することが予測される。後者の車両異常の種類としては、例えばエンジン失火やABS異常などの車両異常が相当し、この場合、車両異常発生からドライバの反応する(急加速や急減速などの「予期せぬ挙動」をする)までの時間が相対的に遅くなる可能性がある。
上記請求項6によれば、車両異常の種類によって上記所定値を変更することで、判断タイミングを一律長くするために当該所定値を画一的な値とする場合と違って、「予期せぬ挙動」が車両異常の影響であるか否かの判断を精度良くすることができる。
【0020】
請求項7の車両の挙動データ記憶システムは、前記車両異常検出装置の前記車両異常情報と、前記記憶装置が取得する挙動データとには共通の時間情報が含まれ、且つ前記車両異常情報には、前記時間情報とフェイルカウンター値とが関連付けられており、前記記憶装置の前記車両異常影響判断手段が、前記挙動判断手段が「予期せぬ挙動」の発生を判断したときの挙動データの時間情報と一致する前記車両異常情報の時間情報から前記フェイルカウンター値を検出することを特徴とする。
【0021】
これによれば、「予期せぬ挙動」の発生を判断したときの挙動データの時間情報と一致する前記車両異常情報の時間情報から前記フェイルカウンター値を検出するから、「予期せぬ挙動」の発生を判断した時点と同時点のフェイルカウンター値を正確に検出することができ、「予期せぬ挙動」が車両異常の影響であるか否かの判断が正確となる。
【0022】
請求項8の車両の挙動データ記憶システムは、前記車両異常検出装置が、前記車両異常情報以外に、車両異常事後制御を実行中であることを示すフェイルセーフ制御中情報を前記車内ネットワーク上に送信可能であって、前記記憶装置の前記記憶制御手段は、前記挙動判断手段が「予期せぬ挙動」の発生を判断したとき、当該「予期せぬ挙動」の発生タイミングが、前記フェイルセーフ制御中情報取得タイミングと合致するときには、当該フェイルセーフ制御の種類を記憶することを特徴とする。
【0023】
車両異常の種類によっては、車両異常検出後、フェイルセーフ制御を行う場合がある。例えばABS用の異常検出装置では、ABS異常検出後(異常確定後)、ABSが作動しないように制御する。このフェイルセーフ制御中に「予期せぬ挙動」が判断されると、車両異常発生に引き続く当該フェイルセーフ制御の影響で当該「予期せぬ挙動」が発生したと考えられる。
【0024】
この場合、請求項8によれば、前記挙動判断手段が「予期せぬ挙動」の発生を判断したとき、当該「予期せぬ挙動」の発生タイミングが、前記フェイルセーフ制御中情報取得タイミングと合致するときには、前記記憶装置の前記記憶制御手段が、当該フェイルセーフ制御の種類を記憶する。挙動データではなく例外的に当該フェイルセーフ制御の種類を記憶決定することで、フェイルセーフ制御の影響の可能性があるところのフェイルセーフ制御の種類を記憶できる。
【0025】
請求項9の車両の挙動データ記憶システムは、前記車両異常検出装置が、記憶装置と一体の電子制御装置に組み込まれていることを特徴とする。この請求項9によれば、車内ネットワークが利用不能な状態であったとしても、前記請求項1ないし8のいずれか一項と同様の効果が得られる。
請求項10〜18の記憶装置は、前記請求項2〜9と同様の効果を奏する。
【図面の簡単な説明】
【0026】
【図1】本発明の第1実施形態の車両の挙動データ記憶システムの機能ブロック図
【図2】車両異常検出装置の制御内容を示すフローチャート
【図3】記憶装置の制御内容を示すフローチャート
【図4】所要時間予測に関連する制御内容を示すフローチャート
【図5】(a)は確定状態まで移行する車両異常発生の様子を示し、(b)は車両異常確定判断方法を概念的に示す図
【図6】(a)は確定状態まで移行しない車両異常発生の様子を示し、(b)は車両異常不成立判断方法を概念的に示す図
【図7】F/S制御を概念的に示す図
【図8】FC値の推移及び「予期せぬ挙動」カウント値の推移の一例を示す図(その1)
【図9】FC値の推移及び「予期せぬ挙動」カウント値の推移の異なる例を示す図(その2)
【図10】同じくさらに異なる例を示す図(その3)
【図11】同じくさらに異なる例を示す図(その4)
【図12】同じくさらに異なる例を示す図(その5)
【図13】所要時間予測方法を概念的に示す図
【図14】(a)は確定状態まで移行する「予期せぬ挙動」発生の様子を示し、(b)は「予期せぬ挙動」確定判断方法を概念的に示す図
【図15】(a)は確定状態まで移行しない「予期せぬ挙動」発生の様子を示し、(b)は「予期せぬ挙動」不成立判断方法を概念的に示す図
【図16】具体的一例を説明するための、車両異常発生に伴うFC値の推移及び「予期せぬ挙動」カウント値の推移を示す図
【図17】第2実施形態を示す図3相当図
【図18】FC値区分を示す図
【図19】第3実施形態を示す図3相当図
【図20】DTC種類と所定値FCpとの関係を示す図
【図21】本発明の第4実施形態を示す図1相当図
【発明を実施するための形態】
【0027】
<第1実施形態>
以下、本発明の第1実施形態について図1ないし図16を用いて説明する。第1実施形態の車両の挙動データ記憶制御システム1は、車内ネットワークである例えばCAN(Controller Area Network)バス2を介して、記憶装置3と、電子制御装置である例えばECU(electronic control unit)4が接続されている。このECU4には、それぞれアクチュエータ5、センサ6、信号線などが接続されており、ECU4は、CPU、ROM、RAMを有するマイクロコンピュータ4aを備えており、このマイクロコンピュータ4aにより、前記センサ6などの入力に応じて、自身が担う制御対象(アクチュエータ5)を制御する制御手段41を構成している。さらに、このECU4は、マイクロコンピュータ4aの自己故障診断機能から構成される車両異常検出装置7を備え、さらに不揮発性メモリ8を備えている。
【0028】
前記CANバス2に接続されているECUは、エンジンECU、変速機ECU、ABS(Antilock Brake System)・ECU、カーナビECU、メーターECU、エアコンECUなど、複数有る。ただし、これら複数のECUをCANバス2上に記載すると図面が煩雑となるため、便宜上、上記ECU4は、これらECUを総合的に含んでいるものとして示している。なお、ECU4に接続されるアクチュエータ5等は1つでなく複数の場合もある。
【0029】
ECU4は、センサ6からの検出信号に基づいて、アクチュエータ5に制御信号を供給して駆動することで、各自が担う所望の制御を実行している。そして、ECU4の車両異常検出装置7が、アクチュエータ5又はセンサ6の無応答や車両情報の異常値に基づき異常を検出した場合、あるいは信号線断線などを検出した場合、この車両異常(以下、DTCという(DTC:Diagnostic Trouble Code))情報をCANバス2上に送信し、且つこのDTC情報をECU4が不揮発性メモリ8に記憶する。このDTC情報には、各ECUごとに当該車両異常の種類とフェイルカウンター値(以下FC値)とを含んでいる。
さらに、前記車両異常検出装置7は、それぞれ前記マイクロコンピュータ4aのソフトウエアによって構成される車両異常確定判断手段9と、DTC情報送信手段10とを有している。
【0030】
上記車両異常検出装置7における制御内容を図2を用いて説明する。
ステップS1で、自己故障診断機能によりDTCを検出すると、ステップS2で、DTC発生(最初の検出)からDTC確定までの段階を示すための前記FC値をカウントする。そして、ステップS3で、当該FC値のカウント値をDTC情報と共にCANバス2上に送信する(DTC情報送信手段10)。このFC値は、図5に示すように、車両異常発生があると、次の単位時間当たりで車両異常発生があることが連続する都度、変数kをk+1としてゆき、FC値を(k/ks)×100[%]で求める。ksはこの変数kの100%設定値である。
【0031】
図5で示すように、前記DTC発生以後、当該異常発生が連続することを条件に当該FC値(百分率で示される)を初期値(例えば0%)から順次増加し(前記ステップS2)、このFC値が予め設定された規定値(100%)まで増加したときに車両異常確定(DTC確定)を判断して(車両異常確定判断手段9)、ステップS5で、DTC確定情報をCANバス2上に送信する。
【0032】
この後、ステップS6では、当該DTCについて既に不揮発性メモリ8に記憶されていないと判断されると、ステップS7でそのときの挙動データ(車両状態などを含む)を不揮発性メモリ8に記憶し、そして、ステップS8でFC値を初期値に戻し、この初期値情報をCANバス2に送信する(DTC情報送信手段10)。上記ステップS6、S7の趣旨は、1種類のDTCに対しては1回しか記憶しない、というものである。この結果、同じ種類のDTCが何度も検出されたとしても、DTC情報が記録されるのは最初の1回のみであり、メモリを無駄に使用することがない。
【0033】
又、図6で示すようにDTC発生が途切れたときには、ステップS9で、車両異常不成立(DTC不成立)を判断して(車両異常確定判断手段9)、ステップS10で、当該DTC不成立情報をCANバス2に送信し、前述のステップS8で、FC値を初期値に戻し、この初期値情報をCANバス2に送信する(DTC情報送信手段10)。一方、ステップS9で、DTC発生が途絶えていないと判定されたときには、ステップS2へ戻りFC値のカウントを継続する。なお、ステップS1でDTCが発生していない、と判定している間は、その際のFC値(初期値)を定期的にCANバス2に送信するようにしても良い。
【0034】
又、前記DTCの種類によっては、上記FC値が規定値である100%に達した(車両異常確定した)後に、車両異常事後制御をする機能を備えたものがあり、この場合、図7に示すように、当該車両異常事後制御を実行中であることを示すフェイルセーフ(以下F/Sという)制御中情報を前記CANバス2上に送信可能としている。
【0035】
前掲した図1において、前記記憶装置3は、CPU、ROM、RAM(いずれも図示せず)を備えたマイクロコンピュータ3aを備えて構成されており、このマイクロコンピュータ3aは通信インターフェース37を介して前記CANバス2に接続されている。このマイクロコンピュータ3aのソフトウエア構成によって構成される後述する挙動判断手段31、車両異常影響判断手段32、記憶制御手段33、情報収集手段34、挙動データ出力手段35、「予期せぬ挙動」確定判断手段36、所要時間予測手段39さらに当該マイクロコンピュータ3aに接続されたメモリとしての不揮発性メモリ38を含んで構成されている。この不揮発性メモリ38及び前記不揮発性メモリ8は、データ書き換え可能なフラッシュメモリなどから構成される。ここでいう「予期せぬ挙動」の一例としては、ドライバが急にアクセルを踏み込んで、増速率が当該記憶装置3が備えた所定条件を超えた場合をいう。
【0036】
この場合記憶装置3は、CANバス2から、車両の状態を示す最新の挙動データを逐次受け取ると共に、DTC情報も逐次受け取る。挙動データとしては、車両の挙動を示す各種車両情報や各種制御情報といったものをいう。そしてこの挙動データ及びDTC情報は前記CANバス2上から前記情報収集手段34を介して各種の挙動データを収集できるようになっている。
【0037】
ここで、ECU4からCANバス2に乗せられる挙動データとしては、エンジン水温、吸気管圧力、エンジン回転数、車速、点火時期(例えば、進角時期)、吸気温度、エアフロー率、スロットル開度、などがあり、これら以外にも種々の挙動データがある。
DTCとしては、回転信号系統異常、点火信号系統異常、エンジン失火異常、各センサー信号異常、燃料系統異常、メーター関係異常、などがあり、これら以外にも種々のDTCがある。
【0038】
さて、前記記憶装置3の制御内容について図3を用いて説明する。
ステップT1では、「予期せぬ挙動」の発生を判断したか否かを判断し(挙動判断手段31)、発生したことが判断されると、ステップT2へ進む。
ステップT2では、「予期せぬ挙動」の発生タイミング(取得タイミング)が、取得したDTC情報の取得タイミングに対して所定タイミング条件を満足しているか否かを判断する(車両異常影響判断手段32)。この場合、この所定タイミング条件は、DTC情報のFC値が例えば所定値FCp(例えばこの場合「15(%)」)以上を示すタイミングQ(Q=15〜100%、図5(b)参照)に合致していること、である。なお、この所定値であるFC値の15%は、DTC発生から、これにドライバが反応して何らかの「予期せぬ挙動」をとるまでの時間を考慮して設定しており、DTCの種類などによってこの所定値は変更可能である。DTC発生からドライバが「予期せぬ挙動」をとるまでに極めて短いDTCの場合には、極端であるが所定値をFC値で1%としても良い。
【0039】
上述のステップT2で、「予期せぬ挙動」の発生タイミングが、図8及び図9に示すように、所定値FCp未満(15%未満)のタイミング(例えばタイミングt1、t2、t3、t4)であるときには、ステップT13で、当該「予期せぬ挙動」の発生原因が当該車両異常の影響でない(DTC影響無し)と判断する(車両異常影響判断手段32)。
又、上述のステップT2で、「予期せぬ挙動」の発生タイミングが図10〜図12に示すように、所定値FCp以上であると、ステップT3で、当該「予期せぬ挙動」の発生原因が当該車両異常の影響である(DTC影響有り)と判断する(車両異常影響判断手段32)。
【0040】
ここで、上記ステップT3でDTC影響有りと判断されることに基づいて別ルーチンで、図4のDTC確定判断結果の取得のための制御を実行する。
この図4において、ステップU1では、「予期せぬ挙動」が発生したと判断した時点から車両異常検出装置7の車両異常確定判断手段9においてDTCが確定するまでの所要時間Dk(図13参照)をフェイルカウンター値の変化率から予測する(所要時間予測手段39)。すなわち、「予期せぬ挙動」発生時点のFC値をFC1とし、当該時点から微小単位時間Δt経過時点でのFC値をFC2とすると、変化率αは(FC2―FC1)/Δtとなる。
【0041】
従って、Dkは
Dk=(100−FC1)/α で求められる。この場合「予期せぬ挙動」発生時点で予め時間カウントは開始しておく。そして、ステップU2で、上記所要時間Dkが経過するのを待って、ステップU3でDTC確定判断結果をCANバス2から取得し、DTC確定かDTC不成立かを判断する。なお、この所要時間Dkは、上記計算値よりも僅かに長くするのが好ましい。
【0042】
図3に戻り、前記ステップT3に続くステップT4では、前記「予期せぬ挙動」が連続して発生しているか否かを判断する。この連続検出が判断されると、ステップT5で「予期せぬ挙動」確定用カウンタ値Yp[%]をカウントする。
この「予期せぬ挙動」確定用カウンタ値Ypは、前記FC値と同様の算出方法で求める。すなわち、図14、図15に示すように、「予期せぬ挙動」発生が連続する都度、変数zをz+1としてゆき、「予期せぬ挙動」確定用カウンタ値Ypを(z/zs)×100[%]で求める。zsはこの変数zの100%設定値である。
【0043】
そしてステップT6で、「予期せぬ挙動」確定用カウンタ値Ypが基準値である100%に達したか否かを判断する。このステップT6で判定基準値に未だ達していないと判断されると、ステップT4に戻る。上記ステップT6で「予期せぬ挙動」確定用カウンタ値Ypが判定基準値である100%に達した(「予期せぬ挙動」の発生が連続して所定時間(図14の符号TS参照)継続した)ことが判断されると、ステップT7で、これをもって「予期せぬ挙動」が確定したと判断し(「予期せぬ挙動」確定判断手段36)、CANバス2から挙動データを取得する。なお、この挙動データの取得タイミングは、最初の「予期せぬ挙動」発生時でも良い。
【0044】
又、前記ステップT4で、「予期せぬ挙動」の連続発生判断で否(「予期せぬ挙動」の発生が判定基準値(所定時間TS)を待たずに途切れた)と判断されたときには、ステップT14に移行して「予期せぬ挙動」不成立と判断する(「予期せぬ挙動」確定判断手段36)と共に、挙動データを記憶せず、「予期せぬ挙動」確定用カウンタ値Ypをクリア(=0)する。なお、この「挙動データを記憶しない」は、前記車両異常影響判断手段32及び前記車両異常確定判断手段9の判断結果にかかわらず挙動データは記憶しない例外措置に相当する。図12がこのケースに相当する。
前記ステップT7に続くステップT8では、F/S制御中か否かを判断し、F/S制御中であることが判断されると、ステップT12で、F/S制御の種類を不揮発性メモリ38に記憶し、ステップT1に戻る。
【0045】
一方で、ステップT8でF/S制御中でないと判断されると、ステップT9に進む。このステップT9では、前記車両異常影響判断手段32の判断結果が、ステップT3のDTC影響有りであったか否か(ステップT13のDTC影響無しであったか)を判断し、影響無しであれば、ステップT15で、ステップT7において取得した挙動データを「予期せぬ挙動データ」として不揮発性メモリ38に記憶する(記憶制御手段33)。
【0046】
又、前記ステップT9で、DTC影響有りが判断されると、ステップT10で、CANバス2からDTC確定・不成立の判断結果(図4のステップU3で取得)が確定であるか否かを判断し、DTC確定であれば、ステップT11で挙動データは記憶しない(記憶制御手段33)。又、前記ステップT10でDTC不成立と判断されると(図11のケースがこれに相当する)、ステップT16で「予期せぬ挙動データ」として不揮発性メモリ38に記憶する例外措置を実行する。
【0047】
なお、記憶装置3の制御内容を具体的一例を挙げて、図16を用いて説明する。エンジン回転数表示用の信号線がタイミングtm1で断線すると、回転数表示メーターに表示回転数例えば1000rpmを示していた状態から、いきなり、0rpmとなり、メーターECUがこの断線に関連するDTCを検出し、FC値をカウントし、送信する(図2のステップS1〜ステップS3)。ここで、ドライバは上記表示されていた回転数が0rpmとなったことで、動揺してアクセルを踏んでしまった場合、タイミングtm2で「予期せぬ挙動」の発生が判断される(図3のステップT1の「YES」)。このとき、F/S制御中ではなく、DTCのFC値は50%であって、所定値FCpを超えているから、DTC影響有りと判断する(ステップT2の「YES」、ステップT3)。これと同時に、「予期せぬ挙動」カウント値のカウントを前もって開始すると共に、DTCが確定するまでの所要時間Dkを予測する(ステップU1)。この場合、2000msと予測される。
【0048】
そして、タイミングtm3で「予期せぬ挙動」確定が判断され(ステップT7)、そしてタイミングtm4(前記所要時間Dk経過時点)でDTC確定か不成立かを判断し(ステップT10)、この場合、DTC確定が判断される。これにより、挙動データは記憶されない(ステップT11)。
【0049】
上述実施形態によれば、記憶装置3は、CANバス2から、挙動データ及びDTC情報を取得し、当該記憶装置3の挙動判断手段31が前記挙動データに基づいて「予期せぬ挙動」の発生を判断したとき、車両異常影響判断手段32が、当該「予期せぬ挙動」の発生タイミングが、取得したDTC情報の当該取得タイミングに対して所定タイミング条件つまり時間的に後であること示す所定値FCp以上を満足するか否かを判断する。そして、この所定タイミング条件を満足する判断の場合、当該「予期せぬ挙動」の発生原因が当該車両異常の影響であると判断する。この判断がなされた場合には(ステップT9)、DTC確定を条件に(ステップT10の「YES」)、記憶制御手段33は、不揮発性メモリ38に当該「予期せぬ挙動」に関連する挙動データは記憶しない(ステップT11)。なお、DTC発生後、確実にDTCが確定する種類のDTCであれば、上記ステップT10の判断は不要である。
【0050】
一方、前記所定タイミング条件を満足しないタイミングであるときには、車両異常影響判断手段32は当該「予期せぬ挙動」の発生原因が当該車両異常の影響でないと判断する。そしてこの判断の場合(ステップT9の「NO」)は、記憶制御手段33が当該「予期せぬ挙動」に関連する挙動データを「予期せぬ挙動データ」として前記不揮発性メモリ38に記憶する(ステップT15)。
【0051】
よって、前記不揮発性メモリ38内には、原因が特定し難い「予期せぬ挙動」のみが記憶されることとなり、メモリを有効に活用することができる。また、合わせて前記不揮発性メモリ38内には、解析に適した挙動データのみが記憶されることとなり、「予期せぬ挙動」の解析を適正に行うことも可能となる。
【0052】
ここで車両異常検出装置7がDTCを検出した場合、このDTCが、なんらかの原因(例えばセンサ信号に外乱ノイズが乗るなど)で一時的に発生し、すぐに消失することがあり、つまり、DTCとして確定していないこともある。このため、上記実施形態において、車両異常検出装置7がFC値をもってDTC確定、不成立を判断することは、記憶装置3側で真のDTCを取り扱うことができるという点から意義がある。又、このFC値をもってDTCの発生から確定までの時間的段階、つまり、このFC値から、「予期せぬ挙動」発生タイミングに対するDTCタイミングの時間的関係も判る。つまり、上記実施形態において、挙動判断手段31が「予期せぬ挙動」の発生を判断したとき、当該「予期せぬ挙動」の発生タイミングが、前記所定タイミング条件である前記FC値が所定値FCp以上を示すタイミングであるときには、当該FC値をもってDTCが発生した後に「予期せぬ挙動」が発生したことと見なすことができる。この結果、FC値をもって、当該「予期せぬ挙動」の発生原因が当該DTCの影響であるか否かを判断でき、判断処理が容易且つ迅速となる。
【0053】
ここで、前記「予期せぬ挙動」確定判断手段36の技術的意義は次にある。すなわち、「予期せぬ挙動」は最初の発生判断で当該「予期せぬ挙動」と確定したものとして取り扱ってもほぼ支障はないが、実際には「予期せぬ挙動」判断の元となった挙動データが不安定であったり、ノイズ的なデータ情報であったりすることもある。
そこで、上述した「予期せぬ挙動」確定判断手段36を設けて、「予期せぬ挙動」が最終的に確定したか否かを判断することは、真の「予期せぬ挙動」を判断できることになる。
又、車両異常検出装置7における車両異常確定判断手段9の技術的意義も「予期せぬ挙動」確定判断手段36と同様の考え方であり、最初に検出したDTCが不安定であったり、ノイズ的なデータ情報からのDTCであったりするので、この車両異常確定判断手段9によりDTCが最終的に確定したか否かを判断することは、真のDTCを判断できることになる。
【0054】
そして、この実施形態では、この「予期せぬ挙動」確定判断手段36と、車両異常確定判断手段9とに基づいて、例外措置を実行するため、「予期せぬ挙動」又はDTCが一時的であった場合における記憶制御を補正できる。すなわち、記憶制御手段33が、車両異常影響判断手段32により前記「予期せぬ挙動」の発生原因が当該車両異常の影響であると判断されたときであっても、車両異常確定判断手段9により車両異常不成立が判断されたときは、「予期せぬ挙動」確定判断手段36により「予期せぬ挙動」確定が判断されたことを条件に挙動データは「予期せぬ挙動データ」として記憶し、「予期せぬ挙動」確定判断手段36により「予期せぬ挙動」不成立が判断されたときには、車両異常影響判断手段32及び車両異常確定判断手段9の判断結果にかかわらず挙動データは記憶しない例外措置を行なうため、「予期せぬ挙動」の確定・不成立、及び車両異常確定・不成立に応じて適正に挙動データの記憶、非記憶を実行(記憶制御の補正)でき、よって、不揮発性メモリ38内を有効に活用するとともに、さらに解析に適した挙動データのみを記憶できる。
【0055】
又、上記実施形態においては、記憶装置3が、挙動判断手段31が「予期せぬ挙動」が発生したと判断した時点からDTC情報が確定するまでの所要時間DkをFC値の変化率から予測する所要時間予測手段39を備え、記憶制御手段33が、当該予測した所要時間Dk経過後にDTC情報が確定したか否かを判断する構成とした。このように構成した趣旨は次にある。
【0056】
図1で示したように、DTC確定情報は車両異常検出装置7によりCANバス2に送信される。すなわち記憶装置3側では、車両異常検出装置7により送信されたDTC確定情報が、挙動判断手段31が「予期せぬ挙動」が発生したと判断した時点から一度もDTCが不成立になることなくFC値がカウントアップされ続けてDTC確定されたものである(パターン1)のか、「予期せぬ挙動」が発生したと判断した時点から少なくとも1回DTCが不成立になってFC値が初期化された後、再びDTCが成立し続けてDTC確定されたものである(パターン2)のか、を判別していない。
【0057】
この点を考慮した上記構成によれば、所要時間予測手段39が、挙動判断手段31が「予期せぬ挙動」が発生したと判断した時点からDTC確定・不成立の判断結果を取得できる所要時間DkをFC値の変化率から予測することで、上記所要時間Dkを適正に予測でき、そして、当該予測した所要時間Dk経過後にDTCが確定したか否かを判断するので、パターン2のような場合には「予期せぬ挙動データ」を記憶し、パターン1のような場合には「予期せぬ挙動データ」を記憶しない、ようにできる。
【0058】
また、先ほど説明したとおり、車両異常情報が確定したか不成立となったかの判断結果は、車両異常検出装置7がCANバス2に送信するものであるから、記憶装置3では、DTC情報取得時点では、いつ、DTC確定・不成立判断結果を取得するか判らない。このため確実にDTC確定・不成立判断結果の取得を待って当該結果を記憶装置3で判断するには、記憶装置3は、前記結果の取得が予想できる時間を見計らって、当該結果を判断することが考えられる。しかし判断実行について確実を期すには、この判断タイミングは、DTC情報取得時点からかなりの余裕をもった長めの時間に設定することとなる。しかしこれでは、DTC情報の種類によっては早くDTC確定・不成立判断結果が出る場合もあり、DTC確定・不成立判断結果の判断タイミングがかなり遅れることになってしまう。しかし、前述したように上記FC値の初期の変化状況(例えば増加率)を検出すれば、記憶装置3側で、ある程度、車両異常確定・不成立の判断結果が出るまでの所要時間を予測することが可能となり、ひいてはDTC確定のタイミングから遅延することなく「予期せぬ挙動」であるか否かの確定を行うことができる、という効果も合わせて奏することができる。
【0059】
又、上記実施形態においては、「予期せぬ挙動」の発生タイミングが、F/S制御中情報取得タイミングと合致するときには、当該F/S制御の種類を記憶するようにした。この趣旨は次にある。すなわち、車両異常検出装置7の種類(ECUの種類)によっては、DTC検出後、F/S制御を行う場合がある。例えばABS用の異常検出装置では、ABS異常検出後(異常確定後)、ABSが作動しないように制御する。このF/S制御中に「予期せぬ挙動」が判断されると、車両異常発生に引き続く当該F/S制御の影響で当該「予期せぬ挙動」が発生したと考えられる。
【0060】
この場合、上述したように、「予期せぬ挙動」の発生を判断したとき、当該「予期せぬ挙動」の発生タイミングが、F/S制御中情報取得タイミングと合致するときには、記憶装置3の記憶制御手段33が、当該F/S制御の種類を記憶するから、挙動データではなく例外的に当該F/S制御の種類を記憶決定することで、F/S制御の影響の可能性があるところのF/S制御の種類を記憶できる。
又、この実施形態においては、車両異常検出装置7を、CANバス2に接続されて予め決められた制御対象を制御するECU(電子制御装置)に組み込んだから、当該CANバス2接続構成を簡単化できる。
【0061】
<第2実施形態>
図17は第2実施形態を示している。この第2実施形態においては、ステップT15の直前にステップTaを追加した点が、第1実施形態と異なる。すなわち、ステップT15では、記憶制御手段33が挙動データを記憶する。そして、このステップT15直前のステップTaでは、「予期せぬ挙動」発生タイミングでのDTCのFC値の大小に応じて記憶する「予期せぬ挙動データ」の種類を調整している。
【0062】
つまり、例えば、「予期せぬ挙動」の発生時点が、図18において、FC値「0%」のタイミングE0である場合と、「1%〜6%未満」のタイミングE1である場合と、「6%超〜15%未満」のタイミングE2である場合とでは、ステップT15で記憶する挙動データの種類を、その順に少なくするように調整する。
【0063】
この調整の趣旨は次にある。すなわち、ステップT9でDTC影響が無いと判断された場合において、「予期せぬ挙動」の発生を判断した時点でのFC値が0%(DTC検出なし)であれば、DTC影響は真に無いと考えられるが、FC値が0%以外のある値を示した(例えば1%〜15%未満)とすると、DTCの影響は皆無でない可能性もある。この場合、当該FC値が大きいほど、DTC検出から「予期せぬ挙動」検出までの時間的間隔が長くて、DTCの影響は無いとは言い切れない。そこで、この第2実施形態では、記憶制御手段33が、「予期せぬ挙動」の発生を判断したときのDTC情報のFC値の大・小に応じて記憶する「予期せぬ挙動データ」の種類を夫々少なく・多く調整するので、挙動データを記憶する場合には、DTCとの関連性の可能性を考慮して当該記憶する挙動データの種類を適正に変更できる。この場合、FC値の大・小の境界値は上述の6%に限るものではない。また、FC値の大・小の分け方も3通りでなく、複数段階で分けるようにしても良い。
【0064】
<第3実施形態>
図19、図20には第3実施形態を示している。図19は第1実施形態の図3に相当し、図3のステップT2の直前にステップTbを追加した点が異なる。この実施形態は、次の点を考慮したものである。すなわち、DTCの種類によっては、DTC検出後、すぐにその影響がドライバの挙動つまり「予期せぬ挙動」として出るものと、ある程度時間がかかるものとがある。例えば前者のDTCの種類としては、電子スロットルポジションセンサの断線やショート、あるいは回転数信号線断線といったDTCが相当し、この場合、ドライバが直ぐに反応して急にアクセル操作をして急加速(「予期せぬ挙動」)したり、急にブレーキを踏み込んで急減速(「予期せぬ挙動」)を呈することが予測される。後者のDTCの種類としては、例えばエンジン失火やABS異常などのDTCが相当し、この場合、DTC発生からドライバの反応する(急加速や急減速などの「予期せぬ挙動」をする)までの時間が相対的に遅くなる可能性がある。
【0065】
この点を考慮した第3実施形態においては、図19のステップTbにおいて、DTCの種類によって、所定タイミング条件である前記所定値FCp以上を示すタイミングの当該所定値FCpを変更する。この変更パターンは、図20に示すように、多種類のDTCを例えば第1群と、第2群と、第3群とに分けている。第1群のDTCは、ドライバがすぐに反応するDTC、第2群のDTCは、ドライバの反応時間が普通(相対的に中間)のDTC、第3群はドライバの反応時間がやや遅いDTCである。そして、DTCの種類が第1群に属する場合には所定値FCpを例えば2%、同じく第2群の場合は15%、第3群の場合は50%に設定(変更)する。なお、上記2%、15%、50%といった設定値はこれに限るものではない。又、DTCの分類の数も3つに限るものではなく、各DTC個々に所定値FCpを変更しても良い。
【0066】
上述した第2実施形態によれば、DTCの種類によって上記所定値FCpを変更することで、当該所定値を画一的な値とする場合と違って、「予期せぬ挙動」がDTCの影響であるか否かの判断を、DTCの種類によっては正確に実施することができる。また、その判断を早くすることもできる。
【0067】
<第4実施形態>
図21には、本発明の第4実施形態を示している。この第4の実施形態においては、CANバス2に接続されるECU4に記憶装置3を設けた構成としている。これによれば、ECU4にて記憶装置3を兼用できる。この場合、不揮発性メモリ8は第1実施形態の不揮発性メモリ38も含むものであり、不揮発性メモリ8は記憶装置3でも使用する。
【0068】
<その他の実施形態>
前述した第1実施形態では、「予期せぬ挙動」の発生タイミングと、取得した車両異常情報の取得タイミングでのFC値とで、DTC影響が有るか否かを判断するようにしたが、車両異常検出装置7の車両異常情報と、記憶装置3が取得する挙動データとには共通の時間情報を含むようにし、且つ前記車両異常情報には、前記時間情報とFC値とを関連付けるようにし、記憶装置3の車両異常影響判断手段32が、挙動判断手段31が「予期せぬ挙動」の発生を判断したときの挙動データの時間情報と一致する前記車両異常情報の時間情報から前記FC値を検出するようにしても良い(請求項7)。
【0069】
これによれば、「予期せぬ挙動」の発生を判断したときの挙動データの時間情報と一致する前記車両異常情報の時間情報から前記FC値を検出するから、「予期せぬ挙動」の発生を判断した時点と同時点のFC値を正確に検出することができ、「予期せぬ挙動」が車両異常の影響であるか否かの判断が正確となる。
又、前述した各実施形態では、車両異常検出装置7を、既存のECUが備えた自己故障診断機能から構成したが、この車両異常検出装置7は、CANバス2上の各種データ、情報から、総合的に車両異常を検出する専用の装置であっても良い。
【0070】
なお、DTC確定情報をCANバス2上に送信するタイミングは、DTC確定した以降も定期的に送信するようにしても良い。
また、図2のステップS5のDTC確定情報の送信、及び、ステップS10のDTC不成立情報の送信は、DTC確定情報又はDTC不成立情報にその判断を行った時刻を示すタイムスタンプを付与して、定期的に送信するようにしても良い。このようにすれば、通信エラーが発生してステップS5又はステップS10において送信されたDTC確定情報又はDTC不成立情報が正常に送受信されなかったとしても、記憶装置3はその後の定期的なタイミングにおいて送信されたDTC確定情報又はDTC不成立情報を使うことで、「予期せぬ挙動」がDTCの影響を受けたものであるかの判定をすることができる。
【符号の説明】
【0071】
図面中、1は車両の挙動データ記憶制御システム、2はCANバス(車内ネットワーク)、3は記憶装置、4はECU(電子制御装置)、7は車両異常検出装置、9は車両異常確定判定手段、10はフェイルカウンター値送信手段、31は挙動判断手段、32は車両異常影響判断手段、33は記憶制御手段、36は「予期せぬ挙動」確定判断手段、38は不揮発性メモリ(メモリ)、39は所要時間予測手段を示す。
【特許請求の範囲】
【請求項1】
記憶装置と、車両異常検出装置とを、車内ネットワークを介してデータ送受可能に接続し、前記車両異常検出装置は、車両異常を検出し車両異常情報を前記車内ネットワーク上に送信し、前記記憶装置は当該車内ネットワークを介して前記車両異常検出装置から車両異常情報を取得可能であると共に、当該車内ネットワークから車両の挙動データを取得可能である車両の挙動データ記憶制御システムであって、
前記記憶装置は、
メモリと、
取得した挙動データに基づき「予期せぬ挙動」が発生したか否かを判断する挙動判断手段と、
前記挙動判断手段が「予期せぬ挙動」の発生を判断したとき、当該「予期せぬ挙動」の発生タイミングが、取得した車両異常情報の当該取得タイミングに対して所定タイミング条件を満足したときに当該「予期せぬ挙動」の発生原因が当該車両異常の影響であると判断し、前記「予期せぬ挙動」の発生タイミングが前記所定タイミング条件を満足しないときに当該「予期せぬ挙動」の発生原因が当該車両異常の影響でないと判断する車両異常影響判断手段と、
前記車両異常影響判断手段により前記「予期せぬ挙動」の発生原因が当該車両異常の影響であると判断されたときには前記「予期せぬ挙動」に関連する挙動データは記憶せず、前記「予期せぬ挙動」の発生原因が当該車両異常の影響でないと判断されたときには前記「予期せぬ挙動」に関連する挙動データを「予期せぬ挙動データ」として記憶する記憶制御手段と、
を備えたことを特徴とする車両の挙動データ記憶システム。
【請求項2】
前記車両異常検出装置は、車両異常発生から車両異常確定までの段階を示すフェイルカウンター値を有し、前記車両異常発生以後、当該異常発生が連続することを条件に当該フェイルカウンター値を初期値から増加し、このフェイルカウンター値が規定値まで増加されたときに車両異常確定を判断してフェイルカウンター値を初期値に戻し、異常発生が途切れたときに車両異常不成立を判断してフェイルカウンター値を初期値に戻す車両異常確定判断手段と、
当該フェイルカウンター値、車両異常確定情報、車両異常不成立情報を車両異常情報に付帯させて前記車内ネットワーク上に送信するフェイルカウンター値送信手段とを有し、
前記記憶装置の前記車両異常影響判断手段において、前記「予期せぬ挙動」の発生原因が当該車両異常の影響であると判断する前記所定タイミング条件は、前記フェイルカウンター値が所定値以上を示すタイミングであることを特徴とする請求項1に記載の車両の挙動データ記憶システム。
【請求項3】
前記記憶装置は、さらに、
前記挙動判断手段が取得した挙動データに基づいて「予期せぬ挙動」が発生したと判断した後、当該「予期せぬ挙動」の発生が連続して所定時間継続されたことをもって当該「予期せぬ挙動」が確定したことを判断し、前記連続発生が前記所定時間を待たずに途切れたときに「予期せぬ挙動」の不成立を判断する「予期せぬ挙動」確定判断手段を備え、
前記記憶制御手段は、前記車両異常影響判断手段により前記「予期せぬ挙動」の発生原因が当該車両異常の影響であると判断されたときであっても、前記車両異常確定判断手段により車両異常不成立が判断されたときは、前記「予期せぬ挙動」確定判断手段により「予期せぬ挙動」確定が判断されたことを条件に前記挙動データは「予期せぬ挙動データ」として記憶し、前記「予期せぬ挙動」確定判断手段により「予期せぬ挙動」不成立が判断されたときには、前記車両異常影響判断手段及び前記車両異常確定判断手段の判断結果にかかわらず前記挙動データは記憶しない例外措置を行なうことを特徴とする請求項1又は2に記載の車両の挙動データ記憶システム。
【請求項4】
前記記憶装置は、さらに、
前記挙動判断手段が「予期せぬ挙動」が発生したと判断した時点から前記車両異常が確定するまでの所要時間をフェイルカウンター値の変化率から予測する所要時間予測手段を備え、
前記記憶制御手段は、当該予測した所要時間経過後に前記車両異常確定判断手段の判断結果を判断することを特徴とする請求項2又は3に記載の車両の挙動データ記憶システム。
【請求項5】
前記記憶制御手段は、挙動データを記憶する場合には、前記挙動判断手段が「予期せぬ挙動」の発生を判断したときの車両異常情報のフェイルカウンター値の大・小に応じて記憶する「予期せぬ挙動データ」の種類を夫々少なく・多く調整することを特徴とする請求項2ないし4のいずれか一項に記載の車両の挙動データ記憶システム。
【請求項6】
前記車両異常検出装置は、前記車両異常情報に、車両異常の種類を含み、
前記記憶装置の車両異常影響判断手段は、前記車両異常の種類によって、前記所定タイミング条件である前記所定値以上を示すタイミングの当該所定値を変更することを特徴とする請求項2ないし5のいずれか一項に記載の車両の挙動データ記憶システム。
【請求項7】
前記車両異常検出装置の前記車両異常情報と、前記記憶装置が取得する挙動データとには共通の時間情報が含まれ、且つ前記車両異常情報には、前記時間情報とフェイルカウンター値とが関連付けられており、
前記記憶装置の前記車両異常影響判断手段は、前記挙動判断手段が「予期せぬ挙動」の発生を判断したときの挙動データの時間情報と一致する前記車両異常情報の時間情報から前記フェイルカウンター値を検出することを特徴とする請求項2ないし6のいずれか一項に記載の車両の挙動データ記憶システム。
【請求項8】
前記車両異常検出装置は、前記車両異常情報以外に、車両異常事後制御を実行中であることを示すフェイルセーフ制御中情報を前記車内ネットワーク上に送信可能であって、
前記記憶装置の前記記憶制御手段は、前記挙動判断手段が「予期せぬ挙動」の発生を判断したとき、当該「予期せぬ挙動」の発生タイミングが、前記フェイルセーフ制御中情報取得タイミングと合致するときには、当該フェイルセーフ制御の種類を記憶することを特徴とする請求項2ないし7のいずれか一項に記載の車両の挙動データ記憶システム。
【請求項9】
前記車両異常検出装置と、前記記憶装置とは、一体の電子制御装置に組み込まれていることを特徴とする請求項1ないし9のいずれか一項に記載の車両の挙動データ記憶システム。
【請求項10】
車両の挙動データと車両の異常を示す車両異常情報との取得が可能な記憶装置であって、
メモリと、
取得した挙動データに基づき「予期せぬ挙動」が発生したか否かを判断する挙動判断手段と、
前記挙動判断手段が「予期せぬ挙動」の発生を判断したとき、当該「予期せぬ挙動」の発生タイミングが、取得した車両異常情報の当該取得タイミングに対して所定タイミング条件を満足したときに当該「予期せぬ挙動」の発生原因が当該車両異常の影響であると判断し、前記「予期せぬ挙動」の発生タイミングが前記所定タイミング条件を満足しないときに当該「予期せぬ挙動」の発生原因が当該車両異常の影響でないと判断する車両異常影響判断手段と、
前記車両異常影響判断手段により前記「予期せぬ挙動」の発生原因が当該車両異常の影響であると判断されたときには前記「予期せぬ挙動」に関連する挙動データは記憶せず、前記「予期せぬ挙動」の発生原因が当該車両異常の影響でないと判断されたときには前記「予期せぬ挙動」に関連する挙動データを「予期せぬ挙動データ」として記憶する記憶制御手段と、
を備えたことを特徴とする記憶装置。
【請求項11】
前記車両異常情報には、車両異常発生から車両異常確定までの段階を数値で示すフェイルカウンター値、車両異常確定情報、車両異常不成立情報が含まれ、
前記車両異常影響判断手段において、前記「予期せぬ挙動」の発生原因が当該車両異常の影響であると判断する前記所定タイミング条件は、前記フェイルカウンター値が所定値以上を示すタイミングであることを特徴とする請求項10に記載の記憶装置。
【請求項12】
さらに、
前記挙動判断手段が取得した挙動データに基づいて「予期せぬ挙動」が発生したと判断した後、当該「予期せぬ挙動」の発生が連続して所定時間継続されたことをもって当該「予期せぬ挙動」が確定したことを判断し、前記連続発生が前記所定時間を待たずに途切れたときに「予期せぬ挙動」の不成立を判断する「予期せぬ挙動」確定判断手段を備え、
前記記憶制御手段は、前記車両異常影響判断手段により前記「予期せぬ挙動」の発生原因が当該車両異常の影響であると判断されたときであっても、前記車両異常確定判断手段により車両異常不成立が判断されたときは、前記「予期せぬ挙動」確定判断手段により「予期せぬ挙動」確定が判断されたことを条件に前記挙動データは「予期せぬ挙動データ」として記憶し、前記「予期せぬ挙動」確定判断手段により「予期せぬ挙動」不成立が判断されたときには、前記車両異常影響判断手段及び前記車両異常確定判断手段の判断結果にかかわらず前記挙動データは記憶しない例外措置を行なうことを特徴とする請求項11に記載の記憶装置。
【請求項13】
さらに、
前記挙動判断手段が「予期せぬ挙動」が発生したと判断した時点から前記車両異常が確定するまでの所要時間をフェイルカウンター値の変化率から予測する所要時間予測手段を備え、
前記記憶制御手段は、当該予測した所要時間経過後に前記車両異常確定判断手段の判断結果を判断することを特徴とする請求項11又は12に記載の記憶装置。
【請求項14】
前記記憶制御手段は、挙動データを記憶する場合には、前記挙動判断手段が「予期せぬ挙動」の発生を判断したときの前記車両異常情報の前記フェイルカウンター値の大小に応じて記憶する「予期せぬ挙動データ」の種類を調整することを特徴とする請求項11ないし13のいずれか一項に記載の記憶装置。
【請求項15】
前記車両異常情報には、車両異常の種類が含まれ、
前記車両異常影響判断手段は、前記車両異常の種類によって、前記所定タイミング条件である前記所定値以上を示すタイミングの当該所定値を変更することを特徴とする請求項11ないし14のいずれか一項に記載の記憶装置。
【請求項16】
前記車両異常情報と、取得した挙動データとには共通の時間情報が含まれ、
前記車両異常情報には、前記時間情報とフェイルカウンター値とが関連付けられており、
前記車両異常影響判断手段は、前記挙動判断手段が「予期せぬ挙動」の発生を判断したときの挙動データの時間情報と一致する前記車両異常情報の時間情報から前記フェイルカウンター値を検出することを特徴とする請求項11ないし15のいずれか一項に記載の記憶装置。
【請求項17】
前記記憶装置は、前記車両異常情報以外に、車両異常事後制御を実行中であることを示すフェイルセーフ制御中情報を取得可能であって、
前記記憶制御手段は、前記挙動判断手段が「予期せぬ挙動」の発生を判断したとき、当該「予期せぬ挙動」の発生タイミングが、前記フェイルセーフ制御中情報取得タイミングと合致するときには、当該フェイルセーフ制御の種類を記憶することを特徴とする請求項11ないし16のいずれか一項に記載の記憶装置。
【請求項18】
前記記憶装置は、さらに、車両異常を検出する車両異常検出機能を備えることを特徴とする請求項10ないし17のいずれか一項に記載の記憶装置。
【請求項1】
記憶装置と、車両異常検出装置とを、車内ネットワークを介してデータ送受可能に接続し、前記車両異常検出装置は、車両異常を検出し車両異常情報を前記車内ネットワーク上に送信し、前記記憶装置は当該車内ネットワークを介して前記車両異常検出装置から車両異常情報を取得可能であると共に、当該車内ネットワークから車両の挙動データを取得可能である車両の挙動データ記憶制御システムであって、
前記記憶装置は、
メモリと、
取得した挙動データに基づき「予期せぬ挙動」が発生したか否かを判断する挙動判断手段と、
前記挙動判断手段が「予期せぬ挙動」の発生を判断したとき、当該「予期せぬ挙動」の発生タイミングが、取得した車両異常情報の当該取得タイミングに対して所定タイミング条件を満足したときに当該「予期せぬ挙動」の発生原因が当該車両異常の影響であると判断し、前記「予期せぬ挙動」の発生タイミングが前記所定タイミング条件を満足しないときに当該「予期せぬ挙動」の発生原因が当該車両異常の影響でないと判断する車両異常影響判断手段と、
前記車両異常影響判断手段により前記「予期せぬ挙動」の発生原因が当該車両異常の影響であると判断されたときには前記「予期せぬ挙動」に関連する挙動データは記憶せず、前記「予期せぬ挙動」の発生原因が当該車両異常の影響でないと判断されたときには前記「予期せぬ挙動」に関連する挙動データを「予期せぬ挙動データ」として記憶する記憶制御手段と、
を備えたことを特徴とする車両の挙動データ記憶システム。
【請求項2】
前記車両異常検出装置は、車両異常発生から車両異常確定までの段階を示すフェイルカウンター値を有し、前記車両異常発生以後、当該異常発生が連続することを条件に当該フェイルカウンター値を初期値から増加し、このフェイルカウンター値が規定値まで増加されたときに車両異常確定を判断してフェイルカウンター値を初期値に戻し、異常発生が途切れたときに車両異常不成立を判断してフェイルカウンター値を初期値に戻す車両異常確定判断手段と、
当該フェイルカウンター値、車両異常確定情報、車両異常不成立情報を車両異常情報に付帯させて前記車内ネットワーク上に送信するフェイルカウンター値送信手段とを有し、
前記記憶装置の前記車両異常影響判断手段において、前記「予期せぬ挙動」の発生原因が当該車両異常の影響であると判断する前記所定タイミング条件は、前記フェイルカウンター値が所定値以上を示すタイミングであることを特徴とする請求項1に記載の車両の挙動データ記憶システム。
【請求項3】
前記記憶装置は、さらに、
前記挙動判断手段が取得した挙動データに基づいて「予期せぬ挙動」が発生したと判断した後、当該「予期せぬ挙動」の発生が連続して所定時間継続されたことをもって当該「予期せぬ挙動」が確定したことを判断し、前記連続発生が前記所定時間を待たずに途切れたときに「予期せぬ挙動」の不成立を判断する「予期せぬ挙動」確定判断手段を備え、
前記記憶制御手段は、前記車両異常影響判断手段により前記「予期せぬ挙動」の発生原因が当該車両異常の影響であると判断されたときであっても、前記車両異常確定判断手段により車両異常不成立が判断されたときは、前記「予期せぬ挙動」確定判断手段により「予期せぬ挙動」確定が判断されたことを条件に前記挙動データは「予期せぬ挙動データ」として記憶し、前記「予期せぬ挙動」確定判断手段により「予期せぬ挙動」不成立が判断されたときには、前記車両異常影響判断手段及び前記車両異常確定判断手段の判断結果にかかわらず前記挙動データは記憶しない例外措置を行なうことを特徴とする請求項1又は2に記載の車両の挙動データ記憶システム。
【請求項4】
前記記憶装置は、さらに、
前記挙動判断手段が「予期せぬ挙動」が発生したと判断した時点から前記車両異常が確定するまでの所要時間をフェイルカウンター値の変化率から予測する所要時間予測手段を備え、
前記記憶制御手段は、当該予測した所要時間経過後に前記車両異常確定判断手段の判断結果を判断することを特徴とする請求項2又は3に記載の車両の挙動データ記憶システム。
【請求項5】
前記記憶制御手段は、挙動データを記憶する場合には、前記挙動判断手段が「予期せぬ挙動」の発生を判断したときの車両異常情報のフェイルカウンター値の大・小に応じて記憶する「予期せぬ挙動データ」の種類を夫々少なく・多く調整することを特徴とする請求項2ないし4のいずれか一項に記載の車両の挙動データ記憶システム。
【請求項6】
前記車両異常検出装置は、前記車両異常情報に、車両異常の種類を含み、
前記記憶装置の車両異常影響判断手段は、前記車両異常の種類によって、前記所定タイミング条件である前記所定値以上を示すタイミングの当該所定値を変更することを特徴とする請求項2ないし5のいずれか一項に記載の車両の挙動データ記憶システム。
【請求項7】
前記車両異常検出装置の前記車両異常情報と、前記記憶装置が取得する挙動データとには共通の時間情報が含まれ、且つ前記車両異常情報には、前記時間情報とフェイルカウンター値とが関連付けられており、
前記記憶装置の前記車両異常影響判断手段は、前記挙動判断手段が「予期せぬ挙動」の発生を判断したときの挙動データの時間情報と一致する前記車両異常情報の時間情報から前記フェイルカウンター値を検出することを特徴とする請求項2ないし6のいずれか一項に記載の車両の挙動データ記憶システム。
【請求項8】
前記車両異常検出装置は、前記車両異常情報以外に、車両異常事後制御を実行中であることを示すフェイルセーフ制御中情報を前記車内ネットワーク上に送信可能であって、
前記記憶装置の前記記憶制御手段は、前記挙動判断手段が「予期せぬ挙動」の発生を判断したとき、当該「予期せぬ挙動」の発生タイミングが、前記フェイルセーフ制御中情報取得タイミングと合致するときには、当該フェイルセーフ制御の種類を記憶することを特徴とする請求項2ないし7のいずれか一項に記載の車両の挙動データ記憶システム。
【請求項9】
前記車両異常検出装置と、前記記憶装置とは、一体の電子制御装置に組み込まれていることを特徴とする請求項1ないし9のいずれか一項に記載の車両の挙動データ記憶システム。
【請求項10】
車両の挙動データと車両の異常を示す車両異常情報との取得が可能な記憶装置であって、
メモリと、
取得した挙動データに基づき「予期せぬ挙動」が発生したか否かを判断する挙動判断手段と、
前記挙動判断手段が「予期せぬ挙動」の発生を判断したとき、当該「予期せぬ挙動」の発生タイミングが、取得した車両異常情報の当該取得タイミングに対して所定タイミング条件を満足したときに当該「予期せぬ挙動」の発生原因が当該車両異常の影響であると判断し、前記「予期せぬ挙動」の発生タイミングが前記所定タイミング条件を満足しないときに当該「予期せぬ挙動」の発生原因が当該車両異常の影響でないと判断する車両異常影響判断手段と、
前記車両異常影響判断手段により前記「予期せぬ挙動」の発生原因が当該車両異常の影響であると判断されたときには前記「予期せぬ挙動」に関連する挙動データは記憶せず、前記「予期せぬ挙動」の発生原因が当該車両異常の影響でないと判断されたときには前記「予期せぬ挙動」に関連する挙動データを「予期せぬ挙動データ」として記憶する記憶制御手段と、
を備えたことを特徴とする記憶装置。
【請求項11】
前記車両異常情報には、車両異常発生から車両異常確定までの段階を数値で示すフェイルカウンター値、車両異常確定情報、車両異常不成立情報が含まれ、
前記車両異常影響判断手段において、前記「予期せぬ挙動」の発生原因が当該車両異常の影響であると判断する前記所定タイミング条件は、前記フェイルカウンター値が所定値以上を示すタイミングであることを特徴とする請求項10に記載の記憶装置。
【請求項12】
さらに、
前記挙動判断手段が取得した挙動データに基づいて「予期せぬ挙動」が発生したと判断した後、当該「予期せぬ挙動」の発生が連続して所定時間継続されたことをもって当該「予期せぬ挙動」が確定したことを判断し、前記連続発生が前記所定時間を待たずに途切れたときに「予期せぬ挙動」の不成立を判断する「予期せぬ挙動」確定判断手段を備え、
前記記憶制御手段は、前記車両異常影響判断手段により前記「予期せぬ挙動」の発生原因が当該車両異常の影響であると判断されたときであっても、前記車両異常確定判断手段により車両異常不成立が判断されたときは、前記「予期せぬ挙動」確定判断手段により「予期せぬ挙動」確定が判断されたことを条件に前記挙動データは「予期せぬ挙動データ」として記憶し、前記「予期せぬ挙動」確定判断手段により「予期せぬ挙動」不成立が判断されたときには、前記車両異常影響判断手段及び前記車両異常確定判断手段の判断結果にかかわらず前記挙動データは記憶しない例外措置を行なうことを特徴とする請求項11に記載の記憶装置。
【請求項13】
さらに、
前記挙動判断手段が「予期せぬ挙動」が発生したと判断した時点から前記車両異常が確定するまでの所要時間をフェイルカウンター値の変化率から予測する所要時間予測手段を備え、
前記記憶制御手段は、当該予測した所要時間経過後に前記車両異常確定判断手段の判断結果を判断することを特徴とする請求項11又は12に記載の記憶装置。
【請求項14】
前記記憶制御手段は、挙動データを記憶する場合には、前記挙動判断手段が「予期せぬ挙動」の発生を判断したときの前記車両異常情報の前記フェイルカウンター値の大小に応じて記憶する「予期せぬ挙動データ」の種類を調整することを特徴とする請求項11ないし13のいずれか一項に記載の記憶装置。
【請求項15】
前記車両異常情報には、車両異常の種類が含まれ、
前記車両異常影響判断手段は、前記車両異常の種類によって、前記所定タイミング条件である前記所定値以上を示すタイミングの当該所定値を変更することを特徴とする請求項11ないし14のいずれか一項に記載の記憶装置。
【請求項16】
前記車両異常情報と、取得した挙動データとには共通の時間情報が含まれ、
前記車両異常情報には、前記時間情報とフェイルカウンター値とが関連付けられており、
前記車両異常影響判断手段は、前記挙動判断手段が「予期せぬ挙動」の発生を判断したときの挙動データの時間情報と一致する前記車両異常情報の時間情報から前記フェイルカウンター値を検出することを特徴とする請求項11ないし15のいずれか一項に記載の記憶装置。
【請求項17】
前記記憶装置は、前記車両異常情報以外に、車両異常事後制御を実行中であることを示すフェイルセーフ制御中情報を取得可能であって、
前記記憶制御手段は、前記挙動判断手段が「予期せぬ挙動」の発生を判断したとき、当該「予期せぬ挙動」の発生タイミングが、前記フェイルセーフ制御中情報取得タイミングと合致するときには、当該フェイルセーフ制御の種類を記憶することを特徴とする請求項11ないし16のいずれか一項に記載の記憶装置。
【請求項18】
前記記憶装置は、さらに、車両異常を検出する車両異常検出機能を備えることを特徴とする請求項10ないし17のいずれか一項に記載の記憶装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】

【図21】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【公開番号】特開2012−212394(P2012−212394A)
【公開日】平成24年11月1日(2012.11.1)
【国際特許分類】
【出願番号】特願2011−78573(P2011−78573)
【出願日】平成23年3月31日(2011.3.31)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成24年11月1日(2012.11.1)
【国際特許分類】
【出願日】平成23年3月31日(2011.3.31)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]