
車両の挙動制御装置
【課題】車両の挙動を変更可能なアクチュエータを道路特性情報に応じた適切な制御タイミングで作動させる。
【解決手段】ナビゲーションECU11は、検出された自車両の現在位置と、記憶装置14に記憶されている進行先の凹凸路の開始位置間の距離が所定距離L0となった時点からの車両の走行距離L1を計算する。また、ECU11は、実際に走行した前後方向距離に対する距離の誤差の総和である自車位置のばらつき距離L3を計算し、アクチュエータ21eの作動応答遅れ時間T0内に車両が走行する距離である応答距離L4を計算する。そして、ECU11は、所定距離L0からばらつき距離L3および応答距離L4等を減算した値である残存距離L1*と、走行距離L1とを比較して、走行距離L1が残存距離L1*より大きくなったとき、アクチュエータ21eの事前制御開始情報をサスペンションECU23に供給する。
【解決手段】ナビゲーションECU11は、検出された自車両の現在位置と、記憶装置14に記憶されている進行先の凹凸路の開始位置間の距離が所定距離L0となった時点からの車両の走行距離L1を計算する。また、ECU11は、実際に走行した前後方向距離に対する距離の誤差の総和である自車位置のばらつき距離L3を計算し、アクチュエータ21eの作動応答遅れ時間T0内に車両が走行する距離である応答距離L4を計算する。そして、ECU11は、所定距離L0からばらつき距離L3および応答距離L4等を減算した値である残存距離L1*と、走行距離L1とを比較して、走行距離L1が残存距離L1*より大きくなったとき、アクチュエータ21eの事前制御開始情報をサスペンションECU23に供給する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、挙動制御装置に関し、特に、自車両の現在位置に基づいて取得された進行方向前方の道路特性情報に応じて車両の挙動を変更可能な車両の挙動制御装置に関する。
【背景技術】
【0002】
この種の車両の挙動制御装置として、地図情報と併せて道路の特性情報を記憶する記憶手段と、自車両の現在位置を検出する現在位置検出手段と、この現在位置検出手段により検出された自車両の現在位置に基づいて車両の進行方向前方にて所定距離内の道路特性情報を前記記憶手段から取得する道路特性情報取得手段と、この道路特性情報取得手段が前記道路特性情報を取得した時点で車両の挙動を変更可能なアクチュエータの作動開始時期を特定される本制御手段とを備えたものがあり、例えば下記特許文献1に記載されている。
【特許文献1】特開2000−318634号公報
【0003】
上記特許文献1に記載された車両の挙動制御装置では、検出した自車両の現在位置に基づいて車両の進行方向前方にて所定距離内の道路特性情報が記憶手段から取得される。そして、この道路特性情報すなわち進行先路面が平坦路であるか凹凸路であるか否かに応じて、車両の挙動を変更可能なアクチュエータ(サスペンション装置を構成するショックアブソーバの減衰力を変更可能なアクチュエータ)の作動開始時期が特定され、進行先路面への到達時間に合わせた制御タイミングで、ショックアブソーバの減衰力が「ハード」または「ソフト」に設定されるようになっている。
【0004】
しかし、上記特許文献1に記載された車両の挙動制御装置では、アクチュエータの作動開始時期の設定に際して、自車両の現在位置精度やアクチュエータの作動応答遅れについては何ら考慮されていないので、アクチュエータが適切な制御タイミングで作動しないおそれがある。
【発明の開示】
【0005】
本発明は、上記問題に対処するためになされたものであり、その目的は、車両の挙動を変更可能なアクチュエータの作動開始時期の設定に際して、自車両の現在位置精度等を考慮することで、前記アクチュエータが適切な制御タイミングで作動し得る挙動制御装置を提供することにある。
【0006】
上記目的を達成するため、本発明の特徴は、地図情報と併せて道路の特性情報を記憶する記憶手段と、自車両の現在位置を検出する現在位置検出手段と、この現在位置検出手段により検出された自車両の現在位置に基づいて車両の進行方向前方にて所定距離内の道路特性情報を前記記憶手段から取得する道路特性情報取得手段と、この道路特性情報取得手段が前記道路特性情報を取得した時点で車両の挙動を変更可能なアクチュエータの作動開始時期を特定される本制御手段とを備えた車両の挙動制御装置において、前記道路特性情報取得手段が前記道路特性情報を取得した時点から前記本制御手段が前記アクチュエータの作動を開始させる本制御開始時点までの間にて、前記アクチュエータの作動を前記本制御開始時点より前に開始させる事前制御手段が設けられていることにある。
【0007】
この挙動制御装置においては、道路特性情報取得手段によって道路特性情報が取得された時点から本制御手段によってアクチュエータの作動が開始されるまでの間に、事前制御手段によってアクチュエータの作動が開始される。したがって、アクチュエータの本制御開始時点にてアクチュエータの動作状態を、車両の挙動を的確に変更し得る動作状態(例えば、スタンバイ状態)に設定することが可能である。このため、事前制御手段が設けられていない場合に比して、本制御開始時点におけるアクチュエータの実効を得ることができ、車両の挙動を的確に変更することが可能である。
【0008】
また、本発明の他の特徴は、前記事前制御手段が前記アクチュエータの作動を開始させる事前制御開始時点は、前記アクチュエータの作動応答遅れに応じて、前記本制御手段による本制御開始時点を基に設定されていることにある。ここで、アクチュエータの作動応答遅れとは、アクチュエータの機械的な応答遅れ時間、電気的な応答遅れ時間、システムをセンシングするための無駄時間など応答遅れの総和時間を意味し、予め設定することが可能な所定値である。
【0009】
これによれば、アクチュエータの作動応答遅れに起因した本制御の遅れがなくなり、本制御では適正なタイミングで上記した所期の作動および効果を得ることが可能である。
【0010】
また、本発明の他の特徴は、前記事前制御手段が前記アクチュエータの作動を開始させる事前制御開始時点は、自車両の現在位置精度に応じて、前記本制御手段による本制御開始時点を基に設定されていることにある。ここで、自車両の現在位置精度とは、実際の車両位置と検出した車両位置間の位置精度、検出した車両位置と記憶手段に記憶されている例えば地図上の車両位置間の位置精度などを意味する。
【0011】
これによれば、自車両の現在位置精度に起因した位置誤差を相殺し得るため、本制御の遅れがなくなって、本制御では適正なタイミングで上記した所期の作動および効果を得ることが可能である。特に、アクチュエータの作動応答遅れを考慮に入れた場合には、本制御では最適なタイミングで上記した所期の作動および効果を得ることが可能である。
【0012】
また、本発明の他の特徴は、前記事前制御手段による前記アクチュエータの作動制御量は、前記本制御手段による前記アクチュエータの作動制御量より小さく設定されていることにある。
【0013】
これによれば、事前制御手段によるアクチュエータの作動に伴う無用な車両の挙動変更が抑えられ、しかも本来の本制御手段によるアクチュエータの作動により車両の挙動を的確に変更することが可能である。
【発明を実施するための最良の形態】
【0014】
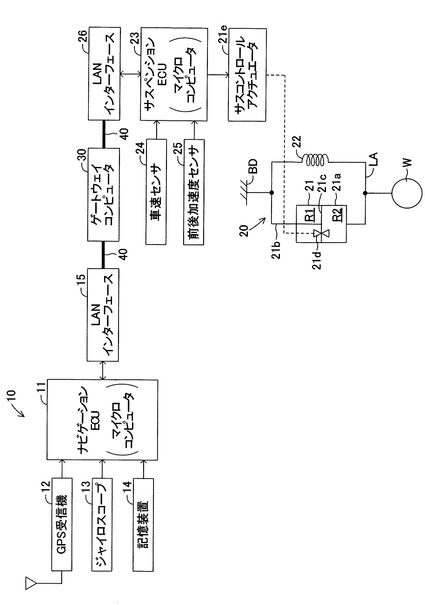
以下、本発明の一実施形態について図面を用いて説明する。図1は本実施形態に係る車両の挙動制御装置の全体を概略的に表すブロック図であって、この挙動制御装置においては、ナビゲーション装置10とサスペンション装置20とがゲートウェイコンピュータ30および車両内に構築されたLAN40(Local Area Network)を介して互いに通信可能に接続されている。ここで、ゲートウェイコンピュータ30は、ナビゲーション装置10とサスペンション装置20間で共有される各種データおよび各装置10,20間の連携を制御する制御信号の流れを統括的に制御するコンピュータである。
【0015】
ナビゲーション装置10は、自車両の現在位置を検出し、この自車両の現在位置に応じた道路の特性に関する各種イベント情報をサスペンション装置20に供給可能なものであり、ナビゲーション電子制御ユニット11(以下、単にナビゲーションECU11という)を備えている。
【0016】
ナビゲーションECU11は、CPU、ROM、RAM、タイマなどからなるマイクロコンピュータを主要構成部品としており、イグニッションスイッチのオン後の所定時間毎に図2の事前制御開始時点設定プログラムおよび図3の事前制御終了時点設定プログラムを繰り返し実行するとともに、ナビゲーション装置10の作動を統括的に制御する。ナビゲーションECU11には、GPS(Global Positioning System)受信機12、ジャイロスコープ13、記憶手段としての記憶装置14、およびLANインターフェース15が接続されている。
【0017】
GPS受信機12は、自車両の現在位置を検出するための電波を衛星から受信し、検出した自車両の現在位置を例えば座標データとして検出する。ジャイロスコープ13は、自車両の進行方向を検出するための車両の旋回速度を検出する。そして、ナビゲーションECU11は、GPS受信機12、ジャイロスコープ13および後述する車速センサ24により検出された各検出値に基づいて自車両の現在位置を検出する。
【0018】
記憶装置14は、ハードディスク、CD−RW、DVD−RAM、DVD−RWなどの情報の書き換えが可能な記憶媒体や、CD−ROM、DVD−ROMなどの記録媒体、およびこれら記録媒体のドライブ装置を含んで構成されている。この記憶装置14は、ナビゲーションECU11で実行される各種プログラムを記憶するとともに、高速道路、国道、県道などを表す道路種別データと、車線数、カーブ半径などを表す道路形状データと、路面の凹凸度、段差などを表す道路特性データとを互いに地図情報と関連付けて記憶している。
【0019】
LANインターフェース15は、LAN40と接続されていて、ナビゲーションECU11とゲートウェイコンピュータ30間の通信を可能とするものである。このLANインターフェース15は、LAN40を介してナビゲーションECU11からの各種情報をゲートウェイコンピュータ30に供給したり、サスペンションECU23からの各種情報を後述するLANインターフェース26を介してゲートウェイコンピュータ30から取得してナビゲーションECU11に供給する。
【0020】
サスペンション装置20は、車体BD(ばね上部材)と各車輪Wとの間にて、ショックアブソーバ21、コイルスプリング22およびロアアームLA(ばね下部材)をそれぞれ備えている。ショックアブソーバ21は、各車輪Wに連結されたロアアームLAと、車体BD間にそれぞれ介装されていて、シリンダ21aの下端にてロアアームLAに連結されるとともに、同シリンダ21aに上下動可能に挿入されたピストンロッド21bの上端にて車体BDに固定されている。コイルスプリング22は、ショックアブソーバ21と並列に設けられている。
【0021】
シリンダ21aは、その内周面上を液密的に摺動するピストン21cにより上下室R1,R2に区画されている。ピストン21cには、可変絞り機構21dが組み付けられている。可変絞り機構21dは、その一部を構成するサスコントロールアクチュエータ21e(以下、単にアクチュエータ21eという)の作動により、絞り量が変更されてシリンダ21aの上下室R1,R2間を連通させる連通路の開度を複数段階に切り換える。本実施形態では、連通路の開度が例えば3段階に切り換えられるようになっており、連通路の開度の最大位置にてショックアブソーバ21の減衰力が「ソフト」に設定され、連通路の開度の最小位置にて同ショックアブソーバ21の減衰力が「ハード」に設定され、連通路の開度の中間位置にて同ショックアブソーバ21の減衰力が「ノーマル」に設定されて、通常走行時は同ショックアブソーバ21の減衰力が「ハード」に設定されている。
【0022】
サスペンション装置20は、またサスペンション電子制御ユニット23(以下、単にサスペンションECU23という)を備えている。サスペンションECU23は、CPU、ROM、RAM、タイマなどからなるマイクロコンピュータを主要構成部品としており、イグニッションスイッチのオン後の所定時間毎に図4の減衰力制御プログラムを繰り返し実行して、アクチュエータ21eの作動を統括的に制御する。サスペンションECU23には、車速センサ24、前後加速度センサ25およびLANインターフェース26が接続されている。
【0023】
車速センサ24は、車輪速に基づいて車速Vを検出する。前後加速度センサ25は、車両の前後方向の前後加速度αを検出する。LANインターフェース26は、LANインターフェース15と同様、LAN40と接続されていて、サスペンションECU23とゲートウェイコンピュータ30間の通信を可能とするものである。このLANインターフェース26は、サスペンションECU23からの各種情報をLAN40を介してゲートウェイコンピュータ30に供給したり、ナビゲーションECU11からの各種情報をLANインターフェース15を介してゲートウェイコンピュータ30から取得してサスペンションECU23に供給する。
【0024】
次に、上記のように構成した本実施形態の作動について説明する。乗員がイグニッションキーを操作してイグニッションスイッチがオンすると、ナビゲーションECU11は、図2の事前制御開始時点設定プログラムおよび図3の事前制御終了時点設定プログラムを所定の短時間毎に繰り返し実行する。
【0025】
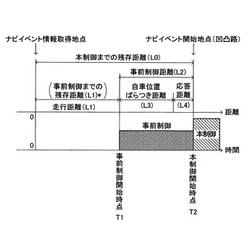
最初に、図2の事前制御開始時点設定プログラムについて説明する。この事前制御開始時点設定プログラムは、車両の進行先路面が凹凸路である場合、その凹凸路に差し掛かる前にショックアブソーバ21の減衰力を予め「ハード」から「ノーマル」に切り換えるアクチュエータ21eの作動開始時点すなわち事前制御開始時点(プレ制御開始時点)を設定するものである(図7参照)。そして、事前制御開始時点に至った時点でショックアブソーバ21の減衰力が「ハード」から「ノーマル」に切り換えられ、車両が凹凸路に差し掛かかったときに、ショックアブソーバ21の減衰力が「ノーマル」から「ソフト」に切り換えられる。これにより、車両が凹凸路に差し掛かったときに、ショックアブソーバ21の減衰力を一段階で「ハード」から「ソフト」に切り換える場合に比して、車両が凹凸路に差し掛かった時点におけるアクチュエータ21eの実効が良好に確保される。
【0026】
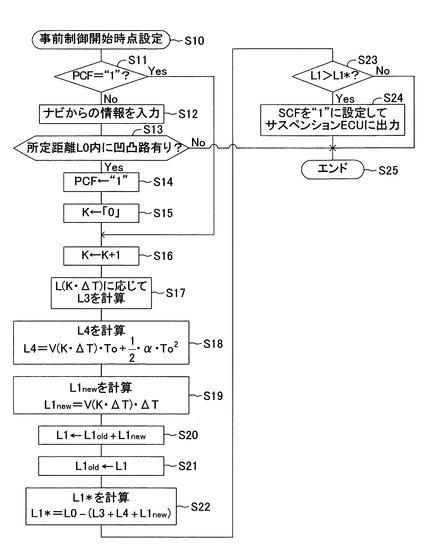
上記した事前制御開始時点設定プログラムは、ステップS10にて実行が開始され、ステップS11にて事前制御フラグPCFが“1”であるか否かを判定する。事前制御フラグPCFは、“0”により自車両の現在位置から進行先の所定距離L0(アクチュエータ21eの本制御が開始されるまでの予め設定された距離)内に凹凸路が存在しないために、ショックアブソーバ21の減衰力を「ハード」から「ノーマル」に切り換える必要のないことを表し、“1”により自車両の現在位置から進行先の所定距離L0内に凹凸路が存在するために、ショックアブソーバ21の減衰力を「ハード」から「ノーマル」に切り換える必要のあることを表し、“0”に初期設定されている。この事前制御フラグPCFが“0”に維持設定されている場合には、ステップS11にて「No」と判定して、ステップS12に進む。
【0027】
ステップS12においては、ナビゲーションECU11が、GPS受信機12、ジャイロスコープ13および車速センサ24からの検出値に基づいて自車両の現在位置(座標データ)を検出するとともに、記憶装置14に記憶されている進行先の凹凸路の開始位置(座標データ)を入力する。
【0028】
ステップS12の処理後、ステップS13にて、検出された自車両の現在位置と、記憶装置14に記憶されている進行先の凹凸路の開始位置とを比較して、両位置間の距離が所定距離L0となったか否かを判定する。両位置間の距離が未だ所定距離L0となっていない場合には、ステップS13にて「No」と判定し、ステップS25にてこの事前制御開始時点設定プログラムの実行を一旦終了する。一方、ステップS13にて「Yes」すなわち前記両位置間の距離が所定距離L0となった場合には、ステップS14以降の処理を実行する。
【0029】
ステップS14においては、事前制御フラグPCFを“1”に設定する。ステップS15においては、カウント値Kを「0」に初期設定する。ステップS16においては、カウント値Kに「1」を加算する。次に、ステップS17においては、自車位置のばらつき距離L3を計算する。
【0030】
自車位置のばらつき距離L3は、車両が走行を開始してから前記凹凸路に差し掛かるまでの間に、実際の車両位置と検出した車両位置間の位置精度に起因した距離の誤差、検出した車両位置と記憶装置14に記憶されている地図上の車両位置間の位置精度に起因した距離の誤差など、実際に走行した前後方向距離に対する距離の誤差の総和を推定した値である。
【0031】
地図上の車両位置は、例えば、交差点右左折時の屈曲路補正、コーナ走行時のコーナ補正、GPSによる位置補正などによって、実際の車両位置と一致するように位置補正されるようになっている。ところが、実際に車両が走行した前後方向距離に対する誤差は、例えば、高速道路のような直線路の走行が長く続くほど、その走行距離に比例して所定の割合で累積するものである。したがって、この距離の誤差を考慮に入れてアクチュエータ21eの事前制御開始時点を設定しなければ、車両が前記凹凸路に差し掛かったときに、アクチュエータ21eの実効が得られないおそれがある。このため、推定したばらつき距離L3を車両が走行している間は、アクチュエータ21eを事前制御するようにして、ばらつき距離L3に起因した本制御の遅れが生じないようにしたものである(図7参照)。
【0032】
そして、このばらつき距離L3の計算においては、ナビゲーションECU11のROM内に設けられたばらつき距離テーブルを参照して、車両と前記凹凸路の開始位置間の距離が所定距離L0となるまで(ステップS13にて「Yes」と判定されるまで)に車両が走行した既走行距離Lに応じたばらつき距離を加味するとともに、車両と前記凹凸路の開始位置間の距離が所定距離L0となった時点からの走行距離(L(K・ΔT))に応じたばらつき距離をも考慮に入れている。ここで、時間ΔTは、この事前制御開始時点設定プログラムの演算周期を表す。
【0033】
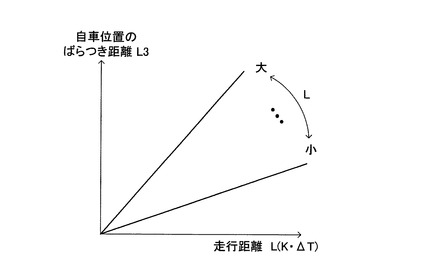
ばらつき距離テーブルは、車両の走行距離(L(K・ΔT))に対するばらつき距離L3を記憶していて、図5に示すように、複数の代表的な既走行距離L毎に、走行距離(L(K・ΔT))の増加に従って線形増加する複数のばらつき距離L3を記憶している。ばらつき距離L3の大きさは、既走行距離Lが長いほど大きい。なお、このばらつき距離テーブルを利用するのに加えてまたは代えて、既走行距離Lおよび走行距離(L(K・ΔT))に応じて変化するばらつき距離L3を関数により予め定義しておき、同関数を利用してばらつき距離L3を計算するようにしてもよい。また、ばらつき距離L3としては、ナビゲーションECU11が実際に車両が走行した際の前後方向距離に対する誤差を計算し、(K・ΔT)時刻における誤差量をサスペンションECU23に送信した値を用いてもよい。
【0034】
ステップS18においては、アクチュエータ21eの作動応答遅れ時間T0、および車両の前後加速度αを用いて、次式1により作動応答遅れ時間T0内に車両が走行する距離としての応答距離L4を計算する。
L4=V(K・ΔT)・T0+(α・T02)/2 …式1
ここで、アクチュエータ21eの作動応答遅れ時間T0は、アクチュエータ21eの機械的な応答遅れ時間および電気的な応答遅れ時間の総和であり、予め設定された所定値である。この作動応答遅れ時間T0は、アクチュエータの種類に応じて、例えばシステムをセンシングするための無駄時間も含まれる。なお、上記式1にて、V(K・ΔT)はカウント値毎に検出される車速を表し、αは車両が走行を開始してから検出された前後加速度のうち加速側の最大値を表す。また、αとしては、その車両の最大加速度を用いてもよい。
【0035】
車両は、アクチュエータ21eの作動応答遅れ時間T0の経過中も走行している。したがって、この作動応答遅れ時間T0が経過中の走行距離を考慮に入れてアクチュエータ21eの事前制御開始時点を設定しなければ、前記凹凸路に差し掛かったときに、アクチュエータ21eの作動による実効が得られないおそれがある。このため、応答距離L4を車両が走行している間は、アクチュエータ21eを事前制御するようにして、アクチュエータ21eの作動応答遅れに起因した本制御の遅れが生じないようにしたものである(図7参照)。
【0036】
ステップS19においては、カウント値毎の今回走行距離L1new(L1new=V(K・ΔT)・ΔT)を計算する。ステップS20においては、前回までの累積走行距離L1oldに今回走行距離L1newを加算して、この加算値をカウントが開始されてからの走行距離L1として設定する。なお、累積走行距離L1oldは、「0」に初期設定されている。ステップS21においては、次回の走行距離L1の計算のために、今回までの走行距離L1を累積走行距離L1oldに更新しておく。
【0037】
ステップS22においては、本制御が開始されるまでの所定距離L0、事前制御距離L2および今回走行距離L1newを用いて、次式2によりカウントが開始されてから事前制御が開始されるまでの残存距離L1*を計算する。
L1*=L0−(L2+L1new)
=L0−(L3+L4+L1new) …式2
【0038】
ステップS23においては、車両の走行距離L1が残存距離L1*より大きいか否かを判定する。車両の走行距離L1が残存距離L1*より大きくなっていない場合には、ステップS23にて「No」と判定し、ステップS25にてこの事前制御開始時点設定プログラムの実行を一旦終了する。ここで、ステップS22,S23にて事前制御が開始されるまでの残存距離L1*を(L0−(L3+L4))とせず、車両の走行距離L1と距離(L0−(L3+L4))とを比較しなかったのは、以下の理由による。
【0039】
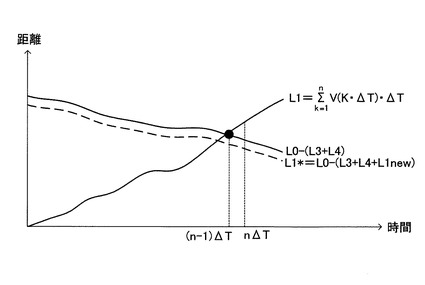
すなわち、自車位置のばらつき距離L3と応答距離L4の加算値を事前制御距離L2に設定した場合(図7参照)、図6に示すように、L1>L0−(L3+L4)を満たす最小のカウント値がnであるときは、カウント値が(n−1)の時点でアクチュエータ21eの事前制御を開始させるようにすることで、事前制御距離L2の開始位置に対する制御遅れが生じなくなる。なお、カウントが開始されてから事前制御が開始されるまでの経過時間T1は次式3で表される。
(n−1)・ΔT≦T1<n・ΔT …式3
【0040】
ところが、カウント値が(n−1)の時点はカウント値がnにならないと特定できない時点であるため、結局のところカウント値がnとなってからアクチュエータ21eの事前制御を開始せざるを得ず、これにより1演算周期である時間ΔTだけ制御遅れが生じてしまう。この制御遅れを解消するために、上記式2で表したように、時間ΔTにおける今回走行距離L1newを考慮に入れて、L1>L0−(L3+L4+L1new)を満たした時点で、アクチュエータ21eの事前制御を開始させるようにすることで、事前制御距離L2の開始位置に対する制御遅れが生じないようにしたものである。
【0041】
ステップS23の説明に戻って、以後、車両の走行距離L1が残存距離L1*より小さい状態が続く限り、ステップS10,S11,S16〜S23,S25の処理が繰り返し実行される。そして、ステップS23にて「Yes」すなわち車両の走行距離L1が残存距離L1*より大きくなったとき、ステップS24の処理を実行する。
【0042】
ステップS24においては、アクチュエータ21eの制御情報であるサスコントロールフラグSCFを“1”に設定する。サスコントロールフラグSCFは、“1”によりアクチュエータ21eを事前制御することを表し、“0”に初期設定されている。そして、ナビゲーションECU11は、LANインターフェース15、ゲートウェイコンピュータ30およびLAN40を介してサスペンションECU23に、事前制御情報(SCF=“1”)を供給する。ステップS24の処理後、ステップS25にてこの事前制御開始時点プログラムの実行を一旦終了する。
【0043】
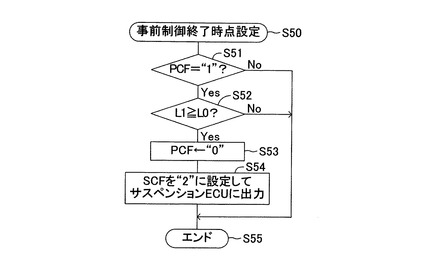
次に、図3の事前制御終了時点設定プログラムについて説明する。この事前制御終了時点設定プログラムは、アクチュエータ21eの事前制御終了時点を設定するとともに、アクチュエータ21eの本制御開始時点を設定するものであり、ステップS50にて実行が開始され、ステップS51にて事前制御フラグPCFが“1”であるか否かを判定する。
【0044】
検出された自車両の現在位置と、記憶装置14に記憶されている進行先の凹凸路の開始位置間の距離が所定距離L0となっていないために、図2のステップS14にて事前制御フラグPCFが“1”に設定されていない場合には、ステップS51にて「No」と判定し、ステップS55にてこの事前制御終了時点設定プログラムの実行を一旦終了する。一方、ステップS51にて「Yes」すなわち事前制御フラグPCFが“1”に設定されている場合には、ステップS52に進む。
【0045】
ステップS52においては、図2のステップS20にて計算された走行距離L1が所定距離L0以上となったか否かを判定する。走行距離L1が未だ所定距離L0未満である場合には、ステップS52にて「No」と判定し、ステップS55にてこの事前制御終了時点設定プログラムの実行を一旦終了する。一方、走行距離L1が所定距離L0以上となった場合には、ステップS52にて「Yes」と判定し、ステップS53以降の処理を実行する。
【0046】
ステップS53においては、事前制御フラグPCFを“0”に設定する。ステップS54においては、アクチュエータ21eの制御情報であるサスコントロールフラグSCFを“2”に設定する。サスコントロールフラグSCFは、“2”によりアクチュエータ21eを本制御することを表す。そして、ナビゲーションECU11は、LANインターフェース15、ゲートウェイコンピュータ30およびLAN40を介してサスペンションECU23に、本制御情報(SCF=“2”)を供給する。ステップS54の処理後、ステップS55にてこの事前制御終了時点設定プログラムの実行を一旦終了する。
【0047】
ナビゲーションECU11が、上記した図2の事前制御開始時点設定プログラムおよび図3の事前制御終了時点設定プログラムを実行するのと並行して、サスペンションECU23は、図4の減衰力制御プログラムを繰り返し実行している。
【0048】
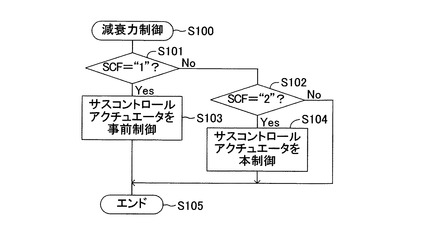
この減衰力制御プログラムは、ナビゲーションECU11から供給された制御情報に基づいて、ショックアブソーバ21により発生される減衰力を「ハード」、「ノーマル」および「ソフト」のうちの何れか一つのモードに設定するものであり、ステップS100にて実行が開始され、ステップS101にてサスコントロールフラグSCFが“1”であるか否かを判定し、ステップS102にてサスコントロールフラグSCFが“2”であるか否かを判定する。
【0049】
図2のステップS14にて事前制御フラグPCFが“1”に設定されていない場合には、サスコントロールフラグSCFが未だ“0”に設定されているので、ステップS101,S102にて何れも「No」と判定して、ステップS105にてこの減衰力制御プログラムの実行を一旦終了する。この状態では、ショックアブソーバ21により発生される減衰力が「ハード」に維持設定されている。
【0050】
この状態から、図2のステップS14にて事前制御フラグPCFが“1”に設定され、かつステップS24にてサスコントロールフラグSCFが“1”に設定された場合には、ステップS101にて「Yes」と判定して、ステップS103の処理を実行する。ステップS103においては、アクチュエータ21eを事前制御すなわちショックアブソーバ21の減衰力を「ハード」から「ノーマル」に切り換える。ステップS103の処理後、ステップS105にてこの減衰力制御プログラムの実行を一旦終了する。そして、サスコントロールフラグSCFが“1”に設定されている状態が続く限り、ステップS100,S101,S103,S105の処理が繰り返し実行されて、ショックアブソーバ21の減衰力が「ノーマル」に維持設定される。
【0051】
そして、この状態から、図3のステップS54にてサスコントロールフラグSCFが“2”に設定された場合には、ステップS101にて「No」、ステップS102にて「Yes」と判定して、ステップS104の処理を実行する。ステップS104においては、アクチュエータ21eを本制御すなわちショックアブソーバ21の減衰力を「ノーマル」から「ソフト」に切り換える。ステップS104の処理後、ステップS105にてこの減衰力制御プログラムの実行を一旦終了する。
【0052】
なお、ショックアブソーバ21の減衰力は、図示を省略するプログラムの実行により、検出された自車両の現在位置(座標データ)と、記憶装置14に記憶されている凹凸路の終了位置(座標データ)とを比較して、検出された自車両の現在位置が凹凸路の終了位置を所定距離だけ越えた時点で、「ソフト」から「ハード」に切り換えられ、これと同時にサスコントロールフラグSCFが“0”に設定されるようになっている。
【0053】
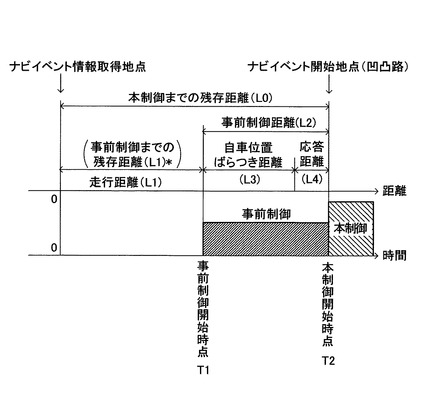
以上の説明からも明らかなように、上記実施形態においては、ナビゲーションECU11による図2のステップS12およびステップS13の処理によって車両の進行先の所定距離L0内に凹凸路が検出された時点から、サスペンションECU23による図4のステップS104の処理によってアクチュエータ21eの本制御が開始されるまでの間に、図7に示すように、事前制御開始時点T1にてアクチュエータ21eの事前制御が開始されて、ショックアブソーバ21の減衰力が「ハード」から「ノーマル」に切り換えられる。このため、アクチュエータ21eの本制御開始時点T2にてショックアブソーバ21の減衰力を直ちに「ソフト」に切り換えることができる。これにより、従来技術に比して、本制御開始時点T2におけるアクチュエータ21eの実効を得ることができ、車両に生じた上下振動を的確に減衰させて車両の乗り心地を向上させることができる。
【0054】
また、上記実施形態においては、アクチュエータの作動を開始させる事前制御開始時点T1が、自車位置のばらつき距離L3と応答距離L4を加算した事前制御距離L2(L2=L3+L4)に応じて、本制御開始時点T2を基に設定されており、事前制御距離L2を車両が走行している間は、アクチュエータ21eが事前制御されるようになっている。これにより、アクチュエータ21eの作動応答遅れに起因した本制御の遅れがなくなるとともに、自車両の現在位置精度に起因した位置誤差を相殺し得ることで本制御の遅れがなくなって、アクチュエータ21eの本制御では適性なタイミングで所期の作動および効果が得られる。
【0055】
また、上記実施形態においては、アクチュエータ21eの事前制御時の作動制御量は、減衰力を「ハード」から「ノーマル」へ切り換えるのに必要な制御量であって、この制御量は、減衰力を一段階で「ハード」から「ソフト」へ切り換えるのに必要なアクチュエータ21eの本制御時の作動制御量より小さく設定されている。これにより、アクチュエータ21eの事前制御に伴う無用な減衰特性の変更が抑えられる。
【0056】
以上、本発明の一実施形態について説明したが、本発明の実施にあたっては、上記実施形態に限定されるものではなく、本発明の目的を逸脱しない限りにおいて種々の変更が可能である。
【0057】
例えば、上記実施形態では、減衰力を3段階に切り換え可能なアクチュエータ21eを含んで構成されるショックアブソーバ21を備えたサスペンション装置に本発明を適用したが、これに限らず、減衰力を3段階以上の複数段階に切り換え可能なアクチュエータを含んで構成されるショックアブソーバを備えたサスペンション装置にも、上記実施形態と同様にして、本発明を適用することが可能である。
【0058】
また、上記実施形態では、アクチュエータ21eの作動を開始させる事前制御開始時点T1を、自車位置のばらつき距離L3と応答距離L4を加算した距離に応じて、本制御開始時点T2を基に設定するようにしたが、前記事前制御開始時点T1を、自車位置のばらつき距離L3および応答距離L4のうちの何れか一方の距離のみに応じて、本制御開始時点T2を基に設定して実施することも可能である。
【0059】
また、上記実施形態では、アクチュエータ21eの事前制御時の作動制御量を、減衰力を「ハード」から「ノーマル」へ切り換えるのに必要な制御量に設定して実施したが、これに限らず、前記事前制御時の作動制御量を、減衰力を一段階で「ハード」から「ソフト」へ切り換えるのに必要な制御量すなわちアクチュエータ21eの本制御時の作動制御量と同じ量に設定して実施することも可能である。
【0060】
また、上記実施形態では、自車位置のばらつき距離L3を計算する場合に、車両位置と進行先の凹凸路の開始位置間の距離が所定距離L0となるまでに車両が走行した既走行距離Lに応じたばらつき距離を加味するとともに、車両と前記凹凸路の開始位置間の距離が所定距離L0となった時点からの走行距離に応じたばらつき距離をも考慮に入れたが、車両と進行先の凹凸路の開始位置間の距離が所定距離L0となるまでに車両が走行した既走行距離Lに基づいてばらつき距離を計算するようにしてもよい。
【0061】
また、上記実施形態では、道路特性情報が凹凸路である場合について実施したが、これに加えてまたは代えて、道路特性情報が、例えば、道路上に存在する段差に関する情報、コーナに関する情報などである場合についても、上記実施形態と同様にして、ショックアブソーバの減衰力を変更することが可能である。
【0062】
また、上記実施形態では、道路特性情報に応じてショックアブソーバの減衰力を予め変更するように実施したが、これに加えてまたは代えて、例えば、捩れ角がアクチュエータにより変更され得るスタビライザバーを用いて、車両がコーナに差し掛かる前に、スタビライザバーの捩り剛性を予め高く変更するように実施することも可能である。
【0063】
また、上記実施形態では、挙動制御装置が減衰力を変更可能なショックアブソーバを有するサスペンション装置を備えていたが、挙動制御装置としてはこれに限らず、例えば、ブレーキ装置、パワーステアリング装置など車両の挙動を変更し得る装置を備えてなる種々の挙動制御装置に本発明を適用することが可能である。挙動制御装置がブレーキ装置を備えている場合には、ブレーキ装置が、例えば下り坂に差し掛かるときに車速を減速するために作動するように設定され、ブレーキ油圧増圧アクチュエータとしての蓄圧式アキュムレータ内の油圧が、前記下り坂に差し掛かる前に予め所定の大きさまで増圧するように設定される。また、挙動制御装置がパワーステアリング装置を備えている場合には、パワーステアリング装置が、例えば高速道路進入時やコーナ手前にてハンドル操舵力を所定の大きさだけ重くするために作動するように設定され、操舵力アシストアクチュエータとしての電動モータの駆動トルクが、車速の増加に従って減少するように設定される。
【図面の簡単な説明】
【0064】
【図1】本発明の一実施形態に係る車両の挙動変更制御装置の全体を概略的に示したブロック図である。
【図2】図1のナビゲーションECUによって実行される事前制御開始時点設定プログラムを示すフローチャートである。
【図3】図1のナビゲーションECUによって実行される事前制御終了時点設定プログラムを示すフローチャートである。
【図4】図1のサスペンションECUによって実行される減衰力制御プログラムを示すフローチャートである。
【図5】図1のナビゲーションECU内に設けられたばらつき距離テーブルに記憶されている走行距離に対するばらつき距離の変化特性を示すグラフである。
【図6】図2の事前制御開始時点設定プログラムの実行により、アクチュエータの事前制御が開始される制御タイミングを示す説明図である。
【図7】図1のサスペンションECUによって実行されるアクチュエータの事前制御開始時点、事前制御終了時点などを示すタイムチャートである。
【符号の説明】
【0065】
10…ナビゲーション装置、11…ナビゲーションECU、12…GPS受信機、14…記憶装置、20…サスペンション装置、21…ショックアブソーバ、21d…可変絞り機構、21e…サスコントロールアクチュエータ、23…サスペンションECU、24…車速センサ、25…前後加速度センサ
【技術分野】
【0001】
本発明は、挙動制御装置に関し、特に、自車両の現在位置に基づいて取得された進行方向前方の道路特性情報に応じて車両の挙動を変更可能な車両の挙動制御装置に関する。
【背景技術】
【0002】
この種の車両の挙動制御装置として、地図情報と併せて道路の特性情報を記憶する記憶手段と、自車両の現在位置を検出する現在位置検出手段と、この現在位置検出手段により検出された自車両の現在位置に基づいて車両の進行方向前方にて所定距離内の道路特性情報を前記記憶手段から取得する道路特性情報取得手段と、この道路特性情報取得手段が前記道路特性情報を取得した時点で車両の挙動を変更可能なアクチュエータの作動開始時期を特定される本制御手段とを備えたものがあり、例えば下記特許文献1に記載されている。
【特許文献1】特開2000−318634号公報
【0003】
上記特許文献1に記載された車両の挙動制御装置では、検出した自車両の現在位置に基づいて車両の進行方向前方にて所定距離内の道路特性情報が記憶手段から取得される。そして、この道路特性情報すなわち進行先路面が平坦路であるか凹凸路であるか否かに応じて、車両の挙動を変更可能なアクチュエータ(サスペンション装置を構成するショックアブソーバの減衰力を変更可能なアクチュエータ)の作動開始時期が特定され、進行先路面への到達時間に合わせた制御タイミングで、ショックアブソーバの減衰力が「ハード」または「ソフト」に設定されるようになっている。
【0004】
しかし、上記特許文献1に記載された車両の挙動制御装置では、アクチュエータの作動開始時期の設定に際して、自車両の現在位置精度やアクチュエータの作動応答遅れについては何ら考慮されていないので、アクチュエータが適切な制御タイミングで作動しないおそれがある。
【発明の開示】
【0005】
本発明は、上記問題に対処するためになされたものであり、その目的は、車両の挙動を変更可能なアクチュエータの作動開始時期の設定に際して、自車両の現在位置精度等を考慮することで、前記アクチュエータが適切な制御タイミングで作動し得る挙動制御装置を提供することにある。
【0006】
上記目的を達成するため、本発明の特徴は、地図情報と併せて道路の特性情報を記憶する記憶手段と、自車両の現在位置を検出する現在位置検出手段と、この現在位置検出手段により検出された自車両の現在位置に基づいて車両の進行方向前方にて所定距離内の道路特性情報を前記記憶手段から取得する道路特性情報取得手段と、この道路特性情報取得手段が前記道路特性情報を取得した時点で車両の挙動を変更可能なアクチュエータの作動開始時期を特定される本制御手段とを備えた車両の挙動制御装置において、前記道路特性情報取得手段が前記道路特性情報を取得した時点から前記本制御手段が前記アクチュエータの作動を開始させる本制御開始時点までの間にて、前記アクチュエータの作動を前記本制御開始時点より前に開始させる事前制御手段が設けられていることにある。
【0007】
この挙動制御装置においては、道路特性情報取得手段によって道路特性情報が取得された時点から本制御手段によってアクチュエータの作動が開始されるまでの間に、事前制御手段によってアクチュエータの作動が開始される。したがって、アクチュエータの本制御開始時点にてアクチュエータの動作状態を、車両の挙動を的確に変更し得る動作状態(例えば、スタンバイ状態)に設定することが可能である。このため、事前制御手段が設けられていない場合に比して、本制御開始時点におけるアクチュエータの実効を得ることができ、車両の挙動を的確に変更することが可能である。
【0008】
また、本発明の他の特徴は、前記事前制御手段が前記アクチュエータの作動を開始させる事前制御開始時点は、前記アクチュエータの作動応答遅れに応じて、前記本制御手段による本制御開始時点を基に設定されていることにある。ここで、アクチュエータの作動応答遅れとは、アクチュエータの機械的な応答遅れ時間、電気的な応答遅れ時間、システムをセンシングするための無駄時間など応答遅れの総和時間を意味し、予め設定することが可能な所定値である。
【0009】
これによれば、アクチュエータの作動応答遅れに起因した本制御の遅れがなくなり、本制御では適正なタイミングで上記した所期の作動および効果を得ることが可能である。
【0010】
また、本発明の他の特徴は、前記事前制御手段が前記アクチュエータの作動を開始させる事前制御開始時点は、自車両の現在位置精度に応じて、前記本制御手段による本制御開始時点を基に設定されていることにある。ここで、自車両の現在位置精度とは、実際の車両位置と検出した車両位置間の位置精度、検出した車両位置と記憶手段に記憶されている例えば地図上の車両位置間の位置精度などを意味する。
【0011】
これによれば、自車両の現在位置精度に起因した位置誤差を相殺し得るため、本制御の遅れがなくなって、本制御では適正なタイミングで上記した所期の作動および効果を得ることが可能である。特に、アクチュエータの作動応答遅れを考慮に入れた場合には、本制御では最適なタイミングで上記した所期の作動および効果を得ることが可能である。
【0012】
また、本発明の他の特徴は、前記事前制御手段による前記アクチュエータの作動制御量は、前記本制御手段による前記アクチュエータの作動制御量より小さく設定されていることにある。
【0013】
これによれば、事前制御手段によるアクチュエータの作動に伴う無用な車両の挙動変更が抑えられ、しかも本来の本制御手段によるアクチュエータの作動により車両の挙動を的確に変更することが可能である。
【発明を実施するための最良の形態】
【0014】
以下、本発明の一実施形態について図面を用いて説明する。図1は本実施形態に係る車両の挙動制御装置の全体を概略的に表すブロック図であって、この挙動制御装置においては、ナビゲーション装置10とサスペンション装置20とがゲートウェイコンピュータ30および車両内に構築されたLAN40(Local Area Network)を介して互いに通信可能に接続されている。ここで、ゲートウェイコンピュータ30は、ナビゲーション装置10とサスペンション装置20間で共有される各種データおよび各装置10,20間の連携を制御する制御信号の流れを統括的に制御するコンピュータである。
【0015】
ナビゲーション装置10は、自車両の現在位置を検出し、この自車両の現在位置に応じた道路の特性に関する各種イベント情報をサスペンション装置20に供給可能なものであり、ナビゲーション電子制御ユニット11(以下、単にナビゲーションECU11という)を備えている。
【0016】
ナビゲーションECU11は、CPU、ROM、RAM、タイマなどからなるマイクロコンピュータを主要構成部品としており、イグニッションスイッチのオン後の所定時間毎に図2の事前制御開始時点設定プログラムおよび図3の事前制御終了時点設定プログラムを繰り返し実行するとともに、ナビゲーション装置10の作動を統括的に制御する。ナビゲーションECU11には、GPS(Global Positioning System)受信機12、ジャイロスコープ13、記憶手段としての記憶装置14、およびLANインターフェース15が接続されている。
【0017】
GPS受信機12は、自車両の現在位置を検出するための電波を衛星から受信し、検出した自車両の現在位置を例えば座標データとして検出する。ジャイロスコープ13は、自車両の進行方向を検出するための車両の旋回速度を検出する。そして、ナビゲーションECU11は、GPS受信機12、ジャイロスコープ13および後述する車速センサ24により検出された各検出値に基づいて自車両の現在位置を検出する。
【0018】
記憶装置14は、ハードディスク、CD−RW、DVD−RAM、DVD−RWなどの情報の書き換えが可能な記憶媒体や、CD−ROM、DVD−ROMなどの記録媒体、およびこれら記録媒体のドライブ装置を含んで構成されている。この記憶装置14は、ナビゲーションECU11で実行される各種プログラムを記憶するとともに、高速道路、国道、県道などを表す道路種別データと、車線数、カーブ半径などを表す道路形状データと、路面の凹凸度、段差などを表す道路特性データとを互いに地図情報と関連付けて記憶している。
【0019】
LANインターフェース15は、LAN40と接続されていて、ナビゲーションECU11とゲートウェイコンピュータ30間の通信を可能とするものである。このLANインターフェース15は、LAN40を介してナビゲーションECU11からの各種情報をゲートウェイコンピュータ30に供給したり、サスペンションECU23からの各種情報を後述するLANインターフェース26を介してゲートウェイコンピュータ30から取得してナビゲーションECU11に供給する。
【0020】
サスペンション装置20は、車体BD(ばね上部材)と各車輪Wとの間にて、ショックアブソーバ21、コイルスプリング22およびロアアームLA(ばね下部材)をそれぞれ備えている。ショックアブソーバ21は、各車輪Wに連結されたロアアームLAと、車体BD間にそれぞれ介装されていて、シリンダ21aの下端にてロアアームLAに連結されるとともに、同シリンダ21aに上下動可能に挿入されたピストンロッド21bの上端にて車体BDに固定されている。コイルスプリング22は、ショックアブソーバ21と並列に設けられている。
【0021】
シリンダ21aは、その内周面上を液密的に摺動するピストン21cにより上下室R1,R2に区画されている。ピストン21cには、可変絞り機構21dが組み付けられている。可変絞り機構21dは、その一部を構成するサスコントロールアクチュエータ21e(以下、単にアクチュエータ21eという)の作動により、絞り量が変更されてシリンダ21aの上下室R1,R2間を連通させる連通路の開度を複数段階に切り換える。本実施形態では、連通路の開度が例えば3段階に切り換えられるようになっており、連通路の開度の最大位置にてショックアブソーバ21の減衰力が「ソフト」に設定され、連通路の開度の最小位置にて同ショックアブソーバ21の減衰力が「ハード」に設定され、連通路の開度の中間位置にて同ショックアブソーバ21の減衰力が「ノーマル」に設定されて、通常走行時は同ショックアブソーバ21の減衰力が「ハード」に設定されている。
【0022】
サスペンション装置20は、またサスペンション電子制御ユニット23(以下、単にサスペンションECU23という)を備えている。サスペンションECU23は、CPU、ROM、RAM、タイマなどからなるマイクロコンピュータを主要構成部品としており、イグニッションスイッチのオン後の所定時間毎に図4の減衰力制御プログラムを繰り返し実行して、アクチュエータ21eの作動を統括的に制御する。サスペンションECU23には、車速センサ24、前後加速度センサ25およびLANインターフェース26が接続されている。
【0023】
車速センサ24は、車輪速に基づいて車速Vを検出する。前後加速度センサ25は、車両の前後方向の前後加速度αを検出する。LANインターフェース26は、LANインターフェース15と同様、LAN40と接続されていて、サスペンションECU23とゲートウェイコンピュータ30間の通信を可能とするものである。このLANインターフェース26は、サスペンションECU23からの各種情報をLAN40を介してゲートウェイコンピュータ30に供給したり、ナビゲーションECU11からの各種情報をLANインターフェース15を介してゲートウェイコンピュータ30から取得してサスペンションECU23に供給する。
【0024】
次に、上記のように構成した本実施形態の作動について説明する。乗員がイグニッションキーを操作してイグニッションスイッチがオンすると、ナビゲーションECU11は、図2の事前制御開始時点設定プログラムおよび図3の事前制御終了時点設定プログラムを所定の短時間毎に繰り返し実行する。
【0025】
最初に、図2の事前制御開始時点設定プログラムについて説明する。この事前制御開始時点設定プログラムは、車両の進行先路面が凹凸路である場合、その凹凸路に差し掛かる前にショックアブソーバ21の減衰力を予め「ハード」から「ノーマル」に切り換えるアクチュエータ21eの作動開始時点すなわち事前制御開始時点(プレ制御開始時点)を設定するものである(図7参照)。そして、事前制御開始時点に至った時点でショックアブソーバ21の減衰力が「ハード」から「ノーマル」に切り換えられ、車両が凹凸路に差し掛かかったときに、ショックアブソーバ21の減衰力が「ノーマル」から「ソフト」に切り換えられる。これにより、車両が凹凸路に差し掛かったときに、ショックアブソーバ21の減衰力を一段階で「ハード」から「ソフト」に切り換える場合に比して、車両が凹凸路に差し掛かった時点におけるアクチュエータ21eの実効が良好に確保される。
【0026】
上記した事前制御開始時点設定プログラムは、ステップS10にて実行が開始され、ステップS11にて事前制御フラグPCFが“1”であるか否かを判定する。事前制御フラグPCFは、“0”により自車両の現在位置から進行先の所定距離L0(アクチュエータ21eの本制御が開始されるまでの予め設定された距離)内に凹凸路が存在しないために、ショックアブソーバ21の減衰力を「ハード」から「ノーマル」に切り換える必要のないことを表し、“1”により自車両の現在位置から進行先の所定距離L0内に凹凸路が存在するために、ショックアブソーバ21の減衰力を「ハード」から「ノーマル」に切り換える必要のあることを表し、“0”に初期設定されている。この事前制御フラグPCFが“0”に維持設定されている場合には、ステップS11にて「No」と判定して、ステップS12に進む。
【0027】
ステップS12においては、ナビゲーションECU11が、GPS受信機12、ジャイロスコープ13および車速センサ24からの検出値に基づいて自車両の現在位置(座標データ)を検出するとともに、記憶装置14に記憶されている進行先の凹凸路の開始位置(座標データ)を入力する。
【0028】
ステップS12の処理後、ステップS13にて、検出された自車両の現在位置と、記憶装置14に記憶されている進行先の凹凸路の開始位置とを比較して、両位置間の距離が所定距離L0となったか否かを判定する。両位置間の距離が未だ所定距離L0となっていない場合には、ステップS13にて「No」と判定し、ステップS25にてこの事前制御開始時点設定プログラムの実行を一旦終了する。一方、ステップS13にて「Yes」すなわち前記両位置間の距離が所定距離L0となった場合には、ステップS14以降の処理を実行する。
【0029】
ステップS14においては、事前制御フラグPCFを“1”に設定する。ステップS15においては、カウント値Kを「0」に初期設定する。ステップS16においては、カウント値Kに「1」を加算する。次に、ステップS17においては、自車位置のばらつき距離L3を計算する。
【0030】
自車位置のばらつき距離L3は、車両が走行を開始してから前記凹凸路に差し掛かるまでの間に、実際の車両位置と検出した車両位置間の位置精度に起因した距離の誤差、検出した車両位置と記憶装置14に記憶されている地図上の車両位置間の位置精度に起因した距離の誤差など、実際に走行した前後方向距離に対する距離の誤差の総和を推定した値である。
【0031】
地図上の車両位置は、例えば、交差点右左折時の屈曲路補正、コーナ走行時のコーナ補正、GPSによる位置補正などによって、実際の車両位置と一致するように位置補正されるようになっている。ところが、実際に車両が走行した前後方向距離に対する誤差は、例えば、高速道路のような直線路の走行が長く続くほど、その走行距離に比例して所定の割合で累積するものである。したがって、この距離の誤差を考慮に入れてアクチュエータ21eの事前制御開始時点を設定しなければ、車両が前記凹凸路に差し掛かったときに、アクチュエータ21eの実効が得られないおそれがある。このため、推定したばらつき距離L3を車両が走行している間は、アクチュエータ21eを事前制御するようにして、ばらつき距離L3に起因した本制御の遅れが生じないようにしたものである(図7参照)。
【0032】
そして、このばらつき距離L3の計算においては、ナビゲーションECU11のROM内に設けられたばらつき距離テーブルを参照して、車両と前記凹凸路の開始位置間の距離が所定距離L0となるまで(ステップS13にて「Yes」と判定されるまで)に車両が走行した既走行距離Lに応じたばらつき距離を加味するとともに、車両と前記凹凸路の開始位置間の距離が所定距離L0となった時点からの走行距離(L(K・ΔT))に応じたばらつき距離をも考慮に入れている。ここで、時間ΔTは、この事前制御開始時点設定プログラムの演算周期を表す。
【0033】
ばらつき距離テーブルは、車両の走行距離(L(K・ΔT))に対するばらつき距離L3を記憶していて、図5に示すように、複数の代表的な既走行距離L毎に、走行距離(L(K・ΔT))の増加に従って線形増加する複数のばらつき距離L3を記憶している。ばらつき距離L3の大きさは、既走行距離Lが長いほど大きい。なお、このばらつき距離テーブルを利用するのに加えてまたは代えて、既走行距離Lおよび走行距離(L(K・ΔT))に応じて変化するばらつき距離L3を関数により予め定義しておき、同関数を利用してばらつき距離L3を計算するようにしてもよい。また、ばらつき距離L3としては、ナビゲーションECU11が実際に車両が走行した際の前後方向距離に対する誤差を計算し、(K・ΔT)時刻における誤差量をサスペンションECU23に送信した値を用いてもよい。
【0034】
ステップS18においては、アクチュエータ21eの作動応答遅れ時間T0、および車両の前後加速度αを用いて、次式1により作動応答遅れ時間T0内に車両が走行する距離としての応答距離L4を計算する。
L4=V(K・ΔT)・T0+(α・T02)/2 …式1
ここで、アクチュエータ21eの作動応答遅れ時間T0は、アクチュエータ21eの機械的な応答遅れ時間および電気的な応答遅れ時間の総和であり、予め設定された所定値である。この作動応答遅れ時間T0は、アクチュエータの種類に応じて、例えばシステムをセンシングするための無駄時間も含まれる。なお、上記式1にて、V(K・ΔT)はカウント値毎に検出される車速を表し、αは車両が走行を開始してから検出された前後加速度のうち加速側の最大値を表す。また、αとしては、その車両の最大加速度を用いてもよい。
【0035】
車両は、アクチュエータ21eの作動応答遅れ時間T0の経過中も走行している。したがって、この作動応答遅れ時間T0が経過中の走行距離を考慮に入れてアクチュエータ21eの事前制御開始時点を設定しなければ、前記凹凸路に差し掛かったときに、アクチュエータ21eの作動による実効が得られないおそれがある。このため、応答距離L4を車両が走行している間は、アクチュエータ21eを事前制御するようにして、アクチュエータ21eの作動応答遅れに起因した本制御の遅れが生じないようにしたものである(図7参照)。
【0036】
ステップS19においては、カウント値毎の今回走行距離L1new(L1new=V(K・ΔT)・ΔT)を計算する。ステップS20においては、前回までの累積走行距離L1oldに今回走行距離L1newを加算して、この加算値をカウントが開始されてからの走行距離L1として設定する。なお、累積走行距離L1oldは、「0」に初期設定されている。ステップS21においては、次回の走行距離L1の計算のために、今回までの走行距離L1を累積走行距離L1oldに更新しておく。
【0037】
ステップS22においては、本制御が開始されるまでの所定距離L0、事前制御距離L2および今回走行距離L1newを用いて、次式2によりカウントが開始されてから事前制御が開始されるまでの残存距離L1*を計算する。
L1*=L0−(L2+L1new)
=L0−(L3+L4+L1new) …式2
【0038】
ステップS23においては、車両の走行距離L1が残存距離L1*より大きいか否かを判定する。車両の走行距離L1が残存距離L1*より大きくなっていない場合には、ステップS23にて「No」と判定し、ステップS25にてこの事前制御開始時点設定プログラムの実行を一旦終了する。ここで、ステップS22,S23にて事前制御が開始されるまでの残存距離L1*を(L0−(L3+L4))とせず、車両の走行距離L1と距離(L0−(L3+L4))とを比較しなかったのは、以下の理由による。
【0039】
すなわち、自車位置のばらつき距離L3と応答距離L4の加算値を事前制御距離L2に設定した場合(図7参照)、図6に示すように、L1>L0−(L3+L4)を満たす最小のカウント値がnであるときは、カウント値が(n−1)の時点でアクチュエータ21eの事前制御を開始させるようにすることで、事前制御距離L2の開始位置に対する制御遅れが生じなくなる。なお、カウントが開始されてから事前制御が開始されるまでの経過時間T1は次式3で表される。
(n−1)・ΔT≦T1<n・ΔT …式3
【0040】
ところが、カウント値が(n−1)の時点はカウント値がnにならないと特定できない時点であるため、結局のところカウント値がnとなってからアクチュエータ21eの事前制御を開始せざるを得ず、これにより1演算周期である時間ΔTだけ制御遅れが生じてしまう。この制御遅れを解消するために、上記式2で表したように、時間ΔTにおける今回走行距離L1newを考慮に入れて、L1>L0−(L3+L4+L1new)を満たした時点で、アクチュエータ21eの事前制御を開始させるようにすることで、事前制御距離L2の開始位置に対する制御遅れが生じないようにしたものである。
【0041】
ステップS23の説明に戻って、以後、車両の走行距離L1が残存距離L1*より小さい状態が続く限り、ステップS10,S11,S16〜S23,S25の処理が繰り返し実行される。そして、ステップS23にて「Yes」すなわち車両の走行距離L1が残存距離L1*より大きくなったとき、ステップS24の処理を実行する。
【0042】
ステップS24においては、アクチュエータ21eの制御情報であるサスコントロールフラグSCFを“1”に設定する。サスコントロールフラグSCFは、“1”によりアクチュエータ21eを事前制御することを表し、“0”に初期設定されている。そして、ナビゲーションECU11は、LANインターフェース15、ゲートウェイコンピュータ30およびLAN40を介してサスペンションECU23に、事前制御情報(SCF=“1”)を供給する。ステップS24の処理後、ステップS25にてこの事前制御開始時点プログラムの実行を一旦終了する。
【0043】
次に、図3の事前制御終了時点設定プログラムについて説明する。この事前制御終了時点設定プログラムは、アクチュエータ21eの事前制御終了時点を設定するとともに、アクチュエータ21eの本制御開始時点を設定するものであり、ステップS50にて実行が開始され、ステップS51にて事前制御フラグPCFが“1”であるか否かを判定する。
【0044】
検出された自車両の現在位置と、記憶装置14に記憶されている進行先の凹凸路の開始位置間の距離が所定距離L0となっていないために、図2のステップS14にて事前制御フラグPCFが“1”に設定されていない場合には、ステップS51にて「No」と判定し、ステップS55にてこの事前制御終了時点設定プログラムの実行を一旦終了する。一方、ステップS51にて「Yes」すなわち事前制御フラグPCFが“1”に設定されている場合には、ステップS52に進む。
【0045】
ステップS52においては、図2のステップS20にて計算された走行距離L1が所定距離L0以上となったか否かを判定する。走行距離L1が未だ所定距離L0未満である場合には、ステップS52にて「No」と判定し、ステップS55にてこの事前制御終了時点設定プログラムの実行を一旦終了する。一方、走行距離L1が所定距離L0以上となった場合には、ステップS52にて「Yes」と判定し、ステップS53以降の処理を実行する。
【0046】
ステップS53においては、事前制御フラグPCFを“0”に設定する。ステップS54においては、アクチュエータ21eの制御情報であるサスコントロールフラグSCFを“2”に設定する。サスコントロールフラグSCFは、“2”によりアクチュエータ21eを本制御することを表す。そして、ナビゲーションECU11は、LANインターフェース15、ゲートウェイコンピュータ30およびLAN40を介してサスペンションECU23に、本制御情報(SCF=“2”)を供給する。ステップS54の処理後、ステップS55にてこの事前制御終了時点設定プログラムの実行を一旦終了する。
【0047】
ナビゲーションECU11が、上記した図2の事前制御開始時点設定プログラムおよび図3の事前制御終了時点設定プログラムを実行するのと並行して、サスペンションECU23は、図4の減衰力制御プログラムを繰り返し実行している。
【0048】
この減衰力制御プログラムは、ナビゲーションECU11から供給された制御情報に基づいて、ショックアブソーバ21により発生される減衰力を「ハード」、「ノーマル」および「ソフト」のうちの何れか一つのモードに設定するものであり、ステップS100にて実行が開始され、ステップS101にてサスコントロールフラグSCFが“1”であるか否かを判定し、ステップS102にてサスコントロールフラグSCFが“2”であるか否かを判定する。
【0049】
図2のステップS14にて事前制御フラグPCFが“1”に設定されていない場合には、サスコントロールフラグSCFが未だ“0”に設定されているので、ステップS101,S102にて何れも「No」と判定して、ステップS105にてこの減衰力制御プログラムの実行を一旦終了する。この状態では、ショックアブソーバ21により発生される減衰力が「ハード」に維持設定されている。
【0050】
この状態から、図2のステップS14にて事前制御フラグPCFが“1”に設定され、かつステップS24にてサスコントロールフラグSCFが“1”に設定された場合には、ステップS101にて「Yes」と判定して、ステップS103の処理を実行する。ステップS103においては、アクチュエータ21eを事前制御すなわちショックアブソーバ21の減衰力を「ハード」から「ノーマル」に切り換える。ステップS103の処理後、ステップS105にてこの減衰力制御プログラムの実行を一旦終了する。そして、サスコントロールフラグSCFが“1”に設定されている状態が続く限り、ステップS100,S101,S103,S105の処理が繰り返し実行されて、ショックアブソーバ21の減衰力が「ノーマル」に維持設定される。
【0051】
そして、この状態から、図3のステップS54にてサスコントロールフラグSCFが“2”に設定された場合には、ステップS101にて「No」、ステップS102にて「Yes」と判定して、ステップS104の処理を実行する。ステップS104においては、アクチュエータ21eを本制御すなわちショックアブソーバ21の減衰力を「ノーマル」から「ソフト」に切り換える。ステップS104の処理後、ステップS105にてこの減衰力制御プログラムの実行を一旦終了する。
【0052】
なお、ショックアブソーバ21の減衰力は、図示を省略するプログラムの実行により、検出された自車両の現在位置(座標データ)と、記憶装置14に記憶されている凹凸路の終了位置(座標データ)とを比較して、検出された自車両の現在位置が凹凸路の終了位置を所定距離だけ越えた時点で、「ソフト」から「ハード」に切り換えられ、これと同時にサスコントロールフラグSCFが“0”に設定されるようになっている。
【0053】
以上の説明からも明らかなように、上記実施形態においては、ナビゲーションECU11による図2のステップS12およびステップS13の処理によって車両の進行先の所定距離L0内に凹凸路が検出された時点から、サスペンションECU23による図4のステップS104の処理によってアクチュエータ21eの本制御が開始されるまでの間に、図7に示すように、事前制御開始時点T1にてアクチュエータ21eの事前制御が開始されて、ショックアブソーバ21の減衰力が「ハード」から「ノーマル」に切り換えられる。このため、アクチュエータ21eの本制御開始時点T2にてショックアブソーバ21の減衰力を直ちに「ソフト」に切り換えることができる。これにより、従来技術に比して、本制御開始時点T2におけるアクチュエータ21eの実効を得ることができ、車両に生じた上下振動を的確に減衰させて車両の乗り心地を向上させることができる。
【0054】
また、上記実施形態においては、アクチュエータの作動を開始させる事前制御開始時点T1が、自車位置のばらつき距離L3と応答距離L4を加算した事前制御距離L2(L2=L3+L4)に応じて、本制御開始時点T2を基に設定されており、事前制御距離L2を車両が走行している間は、アクチュエータ21eが事前制御されるようになっている。これにより、アクチュエータ21eの作動応答遅れに起因した本制御の遅れがなくなるとともに、自車両の現在位置精度に起因した位置誤差を相殺し得ることで本制御の遅れがなくなって、アクチュエータ21eの本制御では適性なタイミングで所期の作動および効果が得られる。
【0055】
また、上記実施形態においては、アクチュエータ21eの事前制御時の作動制御量は、減衰力を「ハード」から「ノーマル」へ切り換えるのに必要な制御量であって、この制御量は、減衰力を一段階で「ハード」から「ソフト」へ切り換えるのに必要なアクチュエータ21eの本制御時の作動制御量より小さく設定されている。これにより、アクチュエータ21eの事前制御に伴う無用な減衰特性の変更が抑えられる。
【0056】
以上、本発明の一実施形態について説明したが、本発明の実施にあたっては、上記実施形態に限定されるものではなく、本発明の目的を逸脱しない限りにおいて種々の変更が可能である。
【0057】
例えば、上記実施形態では、減衰力を3段階に切り換え可能なアクチュエータ21eを含んで構成されるショックアブソーバ21を備えたサスペンション装置に本発明を適用したが、これに限らず、減衰力を3段階以上の複数段階に切り換え可能なアクチュエータを含んで構成されるショックアブソーバを備えたサスペンション装置にも、上記実施形態と同様にして、本発明を適用することが可能である。
【0058】
また、上記実施形態では、アクチュエータ21eの作動を開始させる事前制御開始時点T1を、自車位置のばらつき距離L3と応答距離L4を加算した距離に応じて、本制御開始時点T2を基に設定するようにしたが、前記事前制御開始時点T1を、自車位置のばらつき距離L3および応答距離L4のうちの何れか一方の距離のみに応じて、本制御開始時点T2を基に設定して実施することも可能である。
【0059】
また、上記実施形態では、アクチュエータ21eの事前制御時の作動制御量を、減衰力を「ハード」から「ノーマル」へ切り換えるのに必要な制御量に設定して実施したが、これに限らず、前記事前制御時の作動制御量を、減衰力を一段階で「ハード」から「ソフト」へ切り換えるのに必要な制御量すなわちアクチュエータ21eの本制御時の作動制御量と同じ量に設定して実施することも可能である。
【0060】
また、上記実施形態では、自車位置のばらつき距離L3を計算する場合に、車両位置と進行先の凹凸路の開始位置間の距離が所定距離L0となるまでに車両が走行した既走行距離Lに応じたばらつき距離を加味するとともに、車両と前記凹凸路の開始位置間の距離が所定距離L0となった時点からの走行距離に応じたばらつき距離をも考慮に入れたが、車両と進行先の凹凸路の開始位置間の距離が所定距離L0となるまでに車両が走行した既走行距離Lに基づいてばらつき距離を計算するようにしてもよい。
【0061】
また、上記実施形態では、道路特性情報が凹凸路である場合について実施したが、これに加えてまたは代えて、道路特性情報が、例えば、道路上に存在する段差に関する情報、コーナに関する情報などである場合についても、上記実施形態と同様にして、ショックアブソーバの減衰力を変更することが可能である。
【0062】
また、上記実施形態では、道路特性情報に応じてショックアブソーバの減衰力を予め変更するように実施したが、これに加えてまたは代えて、例えば、捩れ角がアクチュエータにより変更され得るスタビライザバーを用いて、車両がコーナに差し掛かる前に、スタビライザバーの捩り剛性を予め高く変更するように実施することも可能である。
【0063】
また、上記実施形態では、挙動制御装置が減衰力を変更可能なショックアブソーバを有するサスペンション装置を備えていたが、挙動制御装置としてはこれに限らず、例えば、ブレーキ装置、パワーステアリング装置など車両の挙動を変更し得る装置を備えてなる種々の挙動制御装置に本発明を適用することが可能である。挙動制御装置がブレーキ装置を備えている場合には、ブレーキ装置が、例えば下り坂に差し掛かるときに車速を減速するために作動するように設定され、ブレーキ油圧増圧アクチュエータとしての蓄圧式アキュムレータ内の油圧が、前記下り坂に差し掛かる前に予め所定の大きさまで増圧するように設定される。また、挙動制御装置がパワーステアリング装置を備えている場合には、パワーステアリング装置が、例えば高速道路進入時やコーナ手前にてハンドル操舵力を所定の大きさだけ重くするために作動するように設定され、操舵力アシストアクチュエータとしての電動モータの駆動トルクが、車速の増加に従って減少するように設定される。
【図面の簡単な説明】
【0064】
【図1】本発明の一実施形態に係る車両の挙動変更制御装置の全体を概略的に示したブロック図である。
【図2】図1のナビゲーションECUによって実行される事前制御開始時点設定プログラムを示すフローチャートである。
【図3】図1のナビゲーションECUによって実行される事前制御終了時点設定プログラムを示すフローチャートである。
【図4】図1のサスペンションECUによって実行される減衰力制御プログラムを示すフローチャートである。
【図5】図1のナビゲーションECU内に設けられたばらつき距離テーブルに記憶されている走行距離に対するばらつき距離の変化特性を示すグラフである。
【図6】図2の事前制御開始時点設定プログラムの実行により、アクチュエータの事前制御が開始される制御タイミングを示す説明図である。
【図7】図1のサスペンションECUによって実行されるアクチュエータの事前制御開始時点、事前制御終了時点などを示すタイムチャートである。
【符号の説明】
【0065】
10…ナビゲーション装置、11…ナビゲーションECU、12…GPS受信機、14…記憶装置、20…サスペンション装置、21…ショックアブソーバ、21d…可変絞り機構、21e…サスコントロールアクチュエータ、23…サスペンションECU、24…車速センサ、25…前後加速度センサ
【特許請求の範囲】
【請求項1】
地図情報と併せて道路の特性情報を記憶する記憶手段と、自車両の現在位置を検出する現在位置検出手段と、この現在位置検出手段により検出された自車両の現在位置に基づいて車両の進行方向前方にて所定距離内の道路特性情報を前記記憶手段から取得する道路特性情報取得手段と、この道路特性情報取得手段が前記道路特性情報を取得した時点で車両の挙動を変更可能なアクチュエータの作動開始時期を特定される本制御手段とを備えた車両の挙動制御装置において、
前記道路特性情報取得手段が前記道路特性情報を取得した時点から前記本制御手段が前記アクチュエータの作動を開始させる本制御開始時点までの間にて、前記アクチュエータの作動を前記本制御開始時点より前に開始させる事前制御手段が設けられていることを特徴とする車両の挙動制御装置。
【請求項2】
請求項1に記載した車両の挙動制御装置において、
前記事前制御手段が前記アクチュエータの作動を開始させる事前制御開始時点は、前記アクチュエータの作動応答遅れに応じて、前記本制御手段による本制御開始時点を基に設定されていることを特徴とする車両の挙動制御装置。
【請求項3】
請求項1または2に記載した車両の挙動制御装置において、
前記事前制御手段が前記アクチュエータの作動を開始させる事前制御開始時点は、自車両の現在位置精度に応じて、前記本制御手段による本制御開始時点を基に設定されていることを特徴とする車両の挙動制御装置。
【請求項4】
請求項1〜3のうちの何れか一つに記載した車両の挙動制御装置において、
前記事前制御手段による前記アクチュエータの作動制御量は、前記本制御手段による前記アクチュエータの作動制御量より小さく設定されていることを特徴とする車両の挙動制御装置。
【請求項1】
地図情報と併せて道路の特性情報を記憶する記憶手段と、自車両の現在位置を検出する現在位置検出手段と、この現在位置検出手段により検出された自車両の現在位置に基づいて車両の進行方向前方にて所定距離内の道路特性情報を前記記憶手段から取得する道路特性情報取得手段と、この道路特性情報取得手段が前記道路特性情報を取得した時点で車両の挙動を変更可能なアクチュエータの作動開始時期を特定される本制御手段とを備えた車両の挙動制御装置において、
前記道路特性情報取得手段が前記道路特性情報を取得した時点から前記本制御手段が前記アクチュエータの作動を開始させる本制御開始時点までの間にて、前記アクチュエータの作動を前記本制御開始時点より前に開始させる事前制御手段が設けられていることを特徴とする車両の挙動制御装置。
【請求項2】
請求項1に記載した車両の挙動制御装置において、
前記事前制御手段が前記アクチュエータの作動を開始させる事前制御開始時点は、前記アクチュエータの作動応答遅れに応じて、前記本制御手段による本制御開始時点を基に設定されていることを特徴とする車両の挙動制御装置。
【請求項3】
請求項1または2に記載した車両の挙動制御装置において、
前記事前制御手段が前記アクチュエータの作動を開始させる事前制御開始時点は、自車両の現在位置精度に応じて、前記本制御手段による本制御開始時点を基に設定されていることを特徴とする車両の挙動制御装置。
【請求項4】
請求項1〜3のうちの何れか一つに記載した車両の挙動制御装置において、
前記事前制御手段による前記アクチュエータの作動制御量は、前記本制御手段による前記アクチュエータの作動制御量より小さく設定されていることを特徴とする車両の挙動制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2007−191066(P2007−191066A)
【公開日】平成19年8月2日(2007.8.2)
【国際特許分類】
【出願番号】特願2006−11867(P2006−11867)
【出願日】平成18年1月20日(2006.1.20)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成19年8月2日(2007.8.2)
【国際特許分類】
【出願日】平成18年1月20日(2006.1.20)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]