
車両の操作装置

【課題】複数輪を独立して操舵可能な車両において、4輪を独立して操舵する独立操舵走行の操作を容易にする。
【解決手段】モード選択スイッチ21が配置されたケーシング20、ステージ30、ステージ30上に配設されステージ30に対して回転及び固定可能に配設される操作部40を備える。操作部40の上面には、液晶表示装置からなる表示部42が配設され、この表示部42には、車両図43が表示される。表示部42の上面には、タッチパネルが配設される。信地回転の場合、操作部40で回転中心を指定し、指定した回転中心を中心として回転可能に構成される。平行移動の操作の場合、水平面上の前後、左右、斜めの方向に移動可能に構成される。操作部40の動きを、平行移動、信地回転といった独立操舵固有の動きと一致させているので、操作者は、車両の動きをイメージしながら操作することが可能になる。
【解決手段】モード選択スイッチ21が配置されたケーシング20、ステージ30、ステージ30上に配設されステージ30に対して回転及び固定可能に配設される操作部40を備える。操作部40の上面には、液晶表示装置からなる表示部42が配設され、この表示部42には、車両図43が表示される。表示部42の上面には、タッチパネルが配設される。信地回転の場合、操作部40で回転中心を指定し、指定した回転中心を中心として回転可能に構成される。平行移動の操作の場合、水平面上の前後、左右、斜めの方向に移動可能に構成される。操作部40の動きを、平行移動、信地回転といった独立操舵固有の動きと一致させているので、操作者は、車両の動きをイメージしながら操作することが可能になる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の操作装置に係り、詳細には複数車輪の全てを独立して操舵可能な複数輪独立操舵車両の操作装置に関する。
【背景技術】
【0002】
4輪の操舵が可能な車両についての操舵システムについて、特許文献1で提案されている。
この特許文献1では、その操舵システムとして旋回方向を指示する旋回摘み及び、傾けた向きと量によって移動方向と速度を指示する操作レバーとにより、旋回等の操作を行うようになっている。
この旋回摘みと操作レバーの操作により、通常の2輪操舵車のような動きや、前後・左右などの平行移動の指示を容易に行うことができる。
【特許文献1】特開平4−287776号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかし、特許文献1記載の操舵方法の場合、任意の点を中心にして回転するためには旋回摘みと操作レバーとを連携させた複雑な操作が必要である。
特に、各車輪位置で囲まれた領域(以下、車両領域という)内の特定点を回転中心として回転する信地回転を行う場合、旋回摘みと操作レバーによる高度な操作技術を必要とする。
このため、特許文献1記載の操舵システムでは、運転者が回転中心を選択することが困難であった。
【0004】
また、従来の自動車は、車両外に回転中心点が存在するため、運転者は、車両外の点を中心に大きな円弧で回転する動きのイメージと、その操舵に慣れている。
しかし、4輪独立操舵車において、信地回転を行う場合、車両の動きを正確にイメージできない。
このため、車両周辺に障害物が存在する場合に、信地回転による動きをイメージできないために、衝突(接触)するか否かの判断を正確にできない場合がある。
【0005】
そこで本発明は、複数輪を独立して操舵可能な車両において、4輪を独立して操舵する独立操舵走行の操作を容易に行うことが可能な車両の操作装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
(1)請求項1に記載した発明では、複数車輪を備え、各車輪が独立して制御可能な車両の操作装置であって、平行移動する平行移動モードと、所定の地点を回転中心として回転する信地回転モードを選択するモード選択手段と、前記選択されたモードに対応して、車両の移動を指示する操作部と、前記操作部に配置され、前記信地回転モードにおける回転中心を指定する回転中心指定手段と、前記選択されたモードを示すモード情報と、前記操作部による操作情報を出力する操作情報出力手段とを備え、前記操作部は、前記平行移動モードにおいて水平方向に移動可能であり、前記信地回転モードにおいて指定された回転中心を中心として回転可能に構成されている、ことで前記目的を達成する。
(2)請求項2に記載した発明では、請求項1に記載の車両の操作装置において、前記回転中心指定手段は、車両の各車輪位置、全車輪の中心位置、及び隣接する2車輪の中心位置に対応する指定点を備え、いずれか1の指定点を回転中心として指定し、前記操作部は、前記指定された指定点を中心に回転可能である、ことを特徴とする。
(3)請求項3に記載した発明では、請求項2に記載の車両の操作装置において、装置本体と、前記装置本体内に水平方向に移動可能に収容され上部に前記操作部が配置されるステージと、前記各指定点に対応して前記操作部に配置され、前記指定された前記指定点に対応して励磁されると共に、励磁状態で前記操作部の回転に伴い回転する複数の操作部電磁石と、前記各操作部電磁石に対応して前記ステージに配設され、前記指定された指定点に対応して励磁されることで、対応する操作部電磁石の回転に伴い回転するステージ電磁石と、前記各ステージ電磁石の回転量を検出する回転量検出手段と、前記ステージの移動方向と移動量の少なくとも一方を検出する水平方向移動量検出手段と、を備え、前記操作情報出力手段は、信地回転モードの場合、指定された指定点と前記検出した回転量を操作情報として、平行移動モードの場合、前記検出したステージの移動方向と移動量を操作情報として、出力する、ことを特徴とする。
(4)請求項4に記載した発明では、請求項3に記載の車両の操作装置において、前記平行移動モードにおいて、少なくとも2つの前記操作部電磁石及びこれと対応するステージ電磁石が励磁されることで、前記操作部とステージが固定されることを特徴とする。
(5)請求項5に記載した発明では、複数の車輪を備え、各車輪が独立して制御可能な車両の操作装置であって、所定の地点を回転中心として回転する信地回転モードを選択するモード選択手段と、操作部に配置され、前記信地回転モードにおける回転中心を指定する回転中心指定手段と、上部に前記操作部が配置されるステージと、前記各指定点に対応して前記操作部に配置され、前記指定された前記指定点に対応して励磁されると共に、励磁状態で前記操作部の回転に伴い回転する複数の操作部電磁石と、前記各操作部電磁石に対応して前記ステージに配設され、前記指定された指定点に対応して励磁されることで、対応する操作部電磁石の回転に伴い回転するステージ電磁石と、前記各ステージ電磁石の回転量を検出する回転量検出手段と、を備えたことを特徴とする。
(6)請求項6に記載した発明では、請求項5に記載の車両の操作装置において、前記モード選択手段は平行移動する平行移動モードをさらに有し、前記ステージを水平方向に移動可能に収容した装置本体と、前記ステージの移動方向と移動量の少なくとも一方を検出する水平方向移動量検出手段と、を備え、前記操作情報出力手段は、信地回転モードの場合、指定された指定点と前記検出した回転量を操作情報として平行移動モードにおいて、前記検出された指定点と前記検出した回転量を操作情報として、出力することを特徴とする。
【発明の効果】
【0007】
本発明によれば、操作部が、平行移動モードにおいて水平方向に移動可能であり、信地回転モードにおいて指定された回転中心を中心として回転可能に構成されているので、独立操舵走行の操作を容易に行うことができる。
【発明を実施するための最良の形態】
【0008】
以下、本発明の車両における好適な実施形態について、図1から図9を参照して詳細に説明する。
(1)実施形態の概要
本実施形態の車両は、4輪独立操舵車両が対象であり、4つの駆動輪(車輪)のそれぞれにモータが配置されると共に、独立して操舵可能に構成されている。
そして、独立操舵走行は、主として駐車等における短距離の車両移動に使用され、所定速度(例えば、4km/h)以下の速度で移動するように各駆動輪が駆動制御される。
独立操舵走行における走行には、車両領域内を回転中心として回転する信地回転(その場での回転)と、平行移動(全ての駆動輪が同一方向を向いての移動)とがある。
【0009】
通常の走行を行う通常走行モードと、駐車時等の独立操舵走行モードとは、モード選択スイッチで選択される。更にモード選択スイッチにより、独立操舵走行における信地回転と平行移動のいずれかが選択されるようになっている。
【0010】
本実施形態における車両の操作装置では、操作部の操作により平行移動と信地回転(その場での回転)の操作を行う。
操作部は、信地回転の操作の場合、操作部で回転中心を指定し、その指定した回転中心を中心として回転可能に構成される。
操作部は、平行移動の操作の場合、操作部を移動したい方向、すなわち、水平面上の前後、左右、斜めの方向に移動可能に構成される。
このように、操作装置は、操作部の動きを、平行移動、信地回転といった独立操舵固有の動きと一致させているので、操作者は、車両の動きをイメージしながら操作することが可能になる。
【0011】
本実施形態の操作装置で指定可能な回転位置は、各駆動輪の位置4カ所、隣接する駆動輪間の中心位置4カ所、及び、車両領域の重心位置1カ所、の合計9カ所であり、操作部上部に配置された指定ボタンにより指定される。
そして、指定位置を中心として操作部を右、又は左方向に回すことで、回転方向を選択する。
【0012】
車両制御部では、回転中心が選択されると、回転中心位置にない各駆動輪について、各駆動輪を選択された回転中心の方向と略直角方向に操舵する。この場合の「略直角」方向は、回転中心の方向に対して正確に直角となる方向を含み、該正確な直角方向に操舵可能な場合には正確に直角な方向を意味し、駆動輪の操舵機構上の制限から正確に直角方向とすることができない場合には、機構上可能な最も直角に近い最大の角度をいう。
車両制御部は、回転方向が選択され駆動輪の操舵完了後に、選択された回転方向に駆動輪を駆動することで、指定された回転中心を中心にした信地回転が行われる。
【0013】
一方、平行移動モードが選択された場合には、選択された移動方向に各駆動輪を操舵した後駆動輪を駆動することで、前後、左右、駆動輪の方向の合計8方向に平行移動する。
【0014】
(2)実施形態の詳細
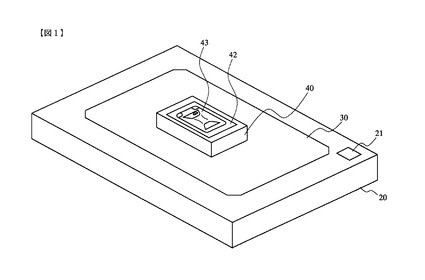
図1は、本実施形態における操作装置の外観構成を表したものである。
この図1に示されるように、操作装置は、モード選択スイッチ21が配置され、中央上部が開口したケーシング20と、ケーシング20内に収容されるステージ30と、ケーシング20の開口内でステージ30上に配設され、ステージ30に対して回転及び固定可能に配設される操作部40とから構成されている。
操作部40の上面には、液晶表示装置からなる表示部42が配設され、この表示部42には、車両図43が表示される。表示部42の上面には、タッチパネルが配設される。
【0015】
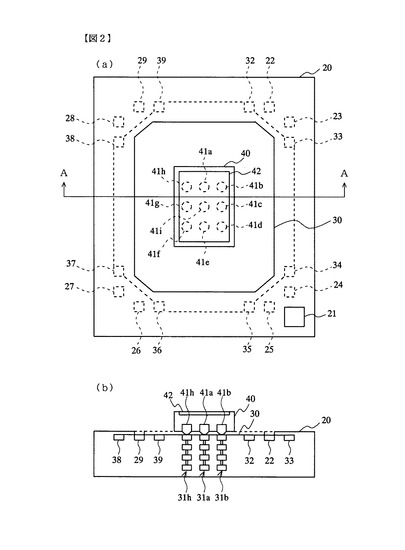
図2は、操作部を回転及び水平面上で平行移動させる操作装置の概略構成を表した平面図及び断面図である。図2(b)は図2(a)のA−A断面を表したものである。
図2に示されるように、操作部40の表示部42と反対側の内部には、信地回転の中心として指定可能な9カ所に対応して9個の電磁石41a、41b、〜41i(以下、操作部40の電磁石全体、又は一般を指す場合には41と表記する)が3行3列に配置されている。
【0016】
信地回転モードが選択された場合、指定された信地回転の回転中心に対応する電磁石41が励磁される。
一方、平行移動モードが選択された場合、本実施形態では、各車輪位置に対応する4角の電磁石41b、41d、41f、41hの4つが励磁されることで、操作部40がステージ30に磁気力により固定される。
なお、平行移動モードでは、少なくとも2つの電磁石41が励磁されるようにしてもよい。2つの場合、対角位置にある電磁石41を励磁するのが好ましい。
【0017】
ステージ30の操作部40と反対側には、ケーシング20内に収容される状態で、9個の回転支持ユニット本体31a、31b、〜31iが固定されている。
9個の回転支持ユニット本体31a、31b、〜31iは、それぞれ、操作部40の電磁石41a、41b、〜41iに対応して、対抗配置されている。
各回転支持ユニット本体31a、31b、〜31iは、それぞれ電磁石41a、41b、〜41iと対をなしており、各対は、回転支持ユニットを構成している。
【0018】
ステージ30の下面には、8個のリニアアクチュエータ32、33、〜39が配置されている。
一方、ケーシング20の開口部外周の上面部下側には、リニアアクチュエータ32、33、〜39の各々に対抗してリニアボリュウム22、23、〜29が配設されている。
【0019】
リニアアクチュエータとリニアボリュウムの組33と23、34と24、37と27、38と28は、ステージ30(及びこれに固定された操作部40)の左右方向の移動量を検出する。
また、リニアアクチュエータとリニアボリュウムの組32と22、35と25、36と26、39と29は、ステージ30(及びこれに固定された操作部40)の前後方向の移動量を検出する。
リニアアクチュエータとリニアボリュウムの組はリニアセンサを構成し、両者が対抗する方向と直交する方向の移動量を検出する。
【0020】
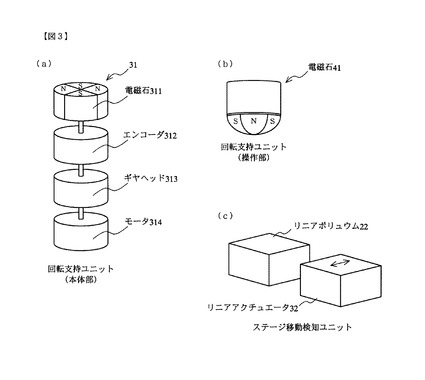
図3は、回転支持ユニット及びリニアセンサの構成を表したものである。
図3(a)は、回転支持ユニット本体31の構成を表したものである。
回転支持ユニット本体31は、操作部40の電磁石41と接した状態で配置される電磁石311、エンコーダ312、ギヤヘッド313、モータ314で構成され、それぞれ、同軸上に連結されている。
【0021】
電磁石311は、複数極(本実施形態では4極)に構成され、上面が平らになっている。電磁石311は、その上部に配置される操作部40の電磁石41の回転に伴い回転する。
エンコーダ312は、電磁石311の回転量を検出する。
【0022】
モータ314は、エンコーダ312で検出した回転方向と逆方向に回転することで、その回転力が反力として、ギヤヘッド313、エンコーダ312、電磁石311を介して、電磁石41に伝わり、更に操作部40に伝達される。
すなわち、モータ314による反力が操作部40に作用することで、操作部40による所定量以上の回転が制限される。モータ314による反力は、例えば、車両周辺に存在する障害物が検知された場合に、信地回転により障害物と接触する可能性がある場合に出力されるようになっている。
なお、ギヤヘッド313は、モータの負荷を調整するためのもので、スリップギヤ、トルククラッチ等が使用される。
【0023】
図3(b)は、操作部40の電磁石41の外観を表したものである。
この図3(b)に示されるように、電磁石41は、電磁石311の極数と同一極数に構成されて、本実施形態では4極である。
そして、電磁石41の電磁石311と対抗する側の面は凸曲面状に形成されており、これにより操作部の回転を滑らかにすることができる。
対を構成する回転支持ユニットの電磁石311と電磁石41は同一のタイミングで励磁されることで、両者の電磁力によりステージ30と操作部40とが固定される。
【0024】
そして、信地回転モードでは指定された回転中心に対応する1対の電磁石311と電磁石41が励磁されることで、その回転支持ユニットを中心に操作部40が回転する。操作部40の回転と一体的に電磁石41が回転し、電磁石41の回転量に応じて電磁石311が回転し、電磁石311の回転量がエンコーダ312により操作部40の回転量として検出されることになる。
【0025】
一方、平行移動モードでは、車輪位置に対応する4角の回転支持ユニットの電磁石311と電磁石41の4組が励磁されることで、操作部40とステージ30とが固定される。
これにより、操作部40は、回転することなく、所望の方向に水平移動させることが可能になる。
【0026】
図3(c)は、リニアアクチュエータ32とリニアボリュウム22の組を例としてリニアセンサの構成を表したものである。
ステージ30と操作部40とが固定された状態で操作部40が移動されると、ステージ30に配置されたリニアアクチュエータ32も移動し、その移動量がリニアボリュウム22で検出される。
ステージ30及び操作部40の斜め方向の移動量は、前後方向及び左右方向の両移動量から算出される。
【0027】
図4は、操作部40に配置された表示部42の表示状態を表したものである。
この図4に示されるように、表示部42には、車両の形状を表した車両図43が表示されている。車両図43は、常時表示されていても、独立操舵走行モードが選択された場合に表示されるようにしても、また、表示画面上に印刷等により描かれていてもよい。
【0028】
図4(a)は、モード選択スイッチ21で平行移動モードが選択された場合の表示部42の表示状態を表したものである。
この図4(a)に示されるように、平行移動モードが選択されると、車両図43と共に、平行移動可能な8方向を示す平行移動方向矢印44が表示される。
この平行移動方向矢印44は、前方向矢印44a、右前方向矢印44b、右方向矢印44c、右後方向矢印44d、後方向矢印44e、左後方向矢印44f、左方向矢印44g、左前方向矢印44hで構成される。
【0029】
本実施形態における平行移動モードにおいて、車両は平行移動方向矢印44で示される8方向にのみ移動可能に構成されている。
一方、平行移動モードにおいて操作部40は、8方向に限定されず任意の方向に移動可能であるが、車両図43と共に平行移動可能な8方向が表示部42に表示されることで、ユーザは、移動させたい方向に対応する矢印方向に操作部を移動しやすくなる。
操作部40の移動方向は、リニアセンサ(リニアアクチュエータとリニアボリウムの組み)で検出され、8方向の矢印の間の方向に操作部40が移動した場合には、8方向矢印44との角度が最も小さい方向に決定される。
【0030】
なお、本実施形態では、平行移動モードにおいて車両は8方向に限定して平行移動するように構成されているが、任意の角度方向に移動する操作部40に対応する角度方向、即ち任意の方向に平行移動可能に構成してもよい。
【0031】
図4(b)は、モード選択スイッチ21で信地回転モードが選択された場合の表示部42の表示状態を表したものである。
この図4(b)に示されるように、信地回転モードが選択されると、車両図43上に回転中心位置を選択するための中心指定スイッチ45a、45b、〜45iが表示される。
9個の中心指定スイッチ45a〜45iの下側には、それぞれ対応する位置に電磁石41a〜41iが配置されている。
信地回転モードにおいて、中心指定スイッチ45が選択されると、対応する電磁石41と電磁石311が励磁され、選択された中心指定スイッチ45の位置を中心に操作部40を回転することができる。
【0032】
本実施形態において操作装置は、運転席と助手席の間に配置されているが、ダッシュボードでハンドルの右又は左側、ハンドルの中心等、任意の場所に配置するようにしてもよい。
【0033】
上述したようにモードの選択は、通常走行モードと独立操舵走行モードとの選択(走行モードの選択)、及び独立操舵走行モードにおける信地回転モードと平行移動モードとの選択がある。
本実施形態におけるモード選択スイッチ21には、通常走行モードスイッチ、独立操舵走行モードにおける信地回転モードスイッチ、独立操舵走行モードにおける平行移動モードスイッチの3つのスイッチが配置され、いずれか1つを選択するようになっている。
【0034】
なお、モード選択スイッチ21は、走行モードを選択した後に、信地回転モードと平行移動モードの選択をするように構成してもよい。
また、モード選択スイッチ21は、スイッチを1つ配置し、選択(押下)される毎に、通常走行モード、信地回転モード、平行移動モードが順次切り替わって選択されるようにしてもよい。
また、ケーシング20に信地回転モードと平行移動モードを選択するスイッチを配置し、走行モードを選択するスイッチを別にハンドル周辺に配置するようにしてもよい。
【0035】
なお、本実施形態では、操作部40の回転操作は、回転方向を指示すると共に、回転量に応じた車両の速度を指示する。この点、平行移動における移動操作も同様に、平行移動の方向と、操作量(移動量)に応じた車両の速度を指示するものである。
この場合、独立操舵走行における車両の回転又は平行移動は、所定速度v1(例えば、4km/h)を最大値とし、回転操作の操作量(操作部40の回転角度)に応じて速度0km/hから速度v1の間の車速で移動するように駆動制御部18で制御される。
ただし、回転操作は回転方向だけを指示し、車速は予め決められた一定速度v2とすることも可能である。
【0036】
図5は、本実施形態の車両における制御系の構成を表したものである。
なお、本実施形態における車両の各機構等については、公知の4輪独立操舵車両に使用されている構成が採用されている。
【0037】
図5に示されるように、本実施形態の車両は、車両制御部10、現在位置検出装置11、地図データ12、車速センサ13、障害物検出部14、表示装置15、入力装置16、操舵機構制御部17、駆動制御部18、通信制御部19、及びその他の各種装置、制御部等を備えている。
【0038】
車両制御部10は、ECU(電子制御装置)、ROM、RAM等から構成されたコンピュータシステムで構成されている。
車両制御部10は、通常走行モードにおける車両の走行制御機能、現在位置検出を含むナビゲーション機能(現在位置表示、目的地設定、経路探索、経路案内等を含む)、独立操舵走行モードにおける独立操舵走行制御機能を実現するための、各種プログラム及びデータがROM及びRAMに格納されている。
【0039】
なお、ナビゲーション機能、及び独立操舵走行制御機能の一部を、それぞれ別のECUとROM、RAMにより実現し、各ECU間は各々の検出信号や判断結果等の各種データや指令信号を通信により共有する、という構成にしてもよい。
【0040】
現在位置検出装置11は、車両の現在位置(緯度、経度からなる絶対座標値)を検出する装置である。
現在位置検出装置11は、人工衛星を利用して車両の位置を測定するGPS(Global Positioning Systems)センサを備えている。
なお、現在位置検出装置11は、GPSセンサによる現在位置検出を補足する装置として、車速センサ、ジャイロセンサを備えている。
更に、地磁気を検出して車両の方位を求める地磁気センサ等を備えるようにしてもよい。
【0041】
地図データ12は、地図情報、道路情報等の各種地図に関連した情報が格納されたデーターベースである。
道路情報は、現在位置検出装置11で検出された車両の現在位置と道路情報とのマップマッチングにより現在走行中の道路及び該道路上の位置を検出するのに使用される。
なお、地図データ12は、車両の現在地周辺や目的地周辺等の各種地図や道路を表示装置に表示するために地図情報が使用され、目的地までの経路探索に道路情報が使用される。
地図データ12には、さらに各施設に対する情報が格納された施設情報(POI情報)等も格納されている。
【0042】
車速センサ13は、車両の現在速度を検出するが、現在位置検出装置11における車速センサと共有するようにしてもよい。
【0043】
障害物検出部14は、赤外線(IR)センサや超音波センサ等のセンサを複数備えており、各センサが車両外周に配置されている。
そして、駐車場内などの低速走行時において、死角を含めた車両周囲をセンシングし、車両周囲に存在する、通行の妨げとなるもの(障害物、人、溝等)を検知する。
赤外線センサとしては、周囲と温度差がある人(物)が動く際におこる赤外線の変化から人を検出する焦電型ひと検出センサが使用される。このように、焦電型ひと検出センサと超音波センサの両検出結果から、車両周辺に存在するものが人か、物かを判断することが可能になる。
また、障害物検出部14は、1又は複数の撮像装置と画像認識処理部とを備えており、車両の周辺全周を撮像し、その撮像画像から障害物を認識するようにしてもよい。
なお、障害物までの距離については、超音波センサで検出される。
表示装置15には、液晶表示装置、CRT、ヘッドアップディスプレイ等の各種表示装置が使用される。
【0044】
表示装置15には、ナビゲーション機能において、現在位置検出装置11で検出した車両の現在位置周辺の地図が地図データ12から読み出されて表示され、該地図上に車両の現在位置が表示される。また、目的地までの走行経路が探索されている場合には、案内中の走行経路も表示されるようになっている。
【0045】
入力装置16には、タッチパネル(スイッチとして機能)、キーボード、マウス、ライトペン、ジョイスティック、赤外線等によるリモコン、表示装置15の表示画面に取り付けられたタッチパネル、リモコン、音声認識装置などの各種の装置が使用可能であり、各種情報を入力するための入力手段を構成する。
入力装置16は、本実施形態において目的地の設定等に使用される。
なお、入力装置16によりモード選択を行うようにしてもよい。
【0046】
操舵機構制御部17は4つの各駆動輪を各々独立して操舵し、駆動制御部18は各駆動輪の駆動を制御する。
操舵機構制御部17及び駆動制御部18により操舵及び駆動が制御される各駆動輪の操舵機構及び駆動機構については、例えば、操舵機構として特開2001−322557公報に記載された機構等の各種機構を採用することが可能である。
【0047】
通信制御部19は、操作装置の通信制御部301(後述)と接続されている。
通信制御部19は、操作装置からモード選択スイッチ21で選択されたモードを示すモード情報と、そのモードにおける操作量を示す操作情報をシリアル通信により受信して、車両制御部10に供給するようになっている。
【0048】
その他、本実施形態の車両では、図示しないが、車内に配置された複数のスピーカ及び音声制御装置で構成された音声出力装置や、音声認識装置等が配置されている。
音声出力装置は、独立操舵走行において障害物と車両との距離が所定距離以下となった場合に、警告音声や警告音を出力するようになっている。
【0049】
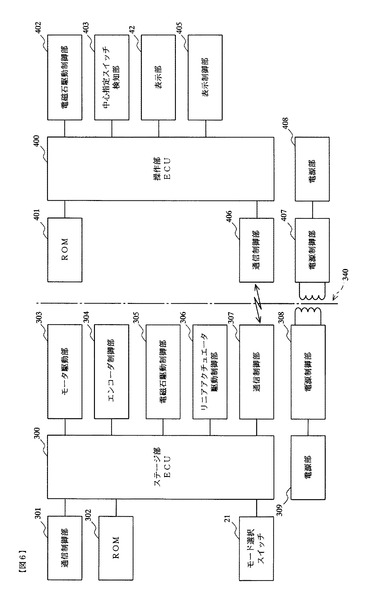
図6は、操作装置における制御系の構成を表したものである。
図6に示されるように、操作装置は、ステージ30の制御系と、操作部40の制御系から構成されており、両者間は通信制御部307、406によるシリアル通信により相互のデータが通信されるようになっている。
【0050】
ステージ30側は、ステージ部ECU300と、通信制御部301、ROM302、モータ駆動部303、エンコーダ制御部304、電磁石駆動制御部305、リニアアクチュエータ駆動制御部306、通信制御部307、電源制御部308、電源部309を備えている。
一方、操作部40側は、操作部ECU400、ROM401、電磁石駆動制御部402、中心指定スイッチ検知部403、表示部42、表示制御部405、通信制御部406、電源制御部407、電源部408を備えている。
走査装置は、両電源制御部308、407間での電力授受を行うトランス340を備えている。
【0051】
ステージ部ECU300は、ROM302に格納されたプログラムに従って、ステージ30の各部を制御する。
操作部ECU400は、ROM401に格納されたプログラムに従って、操作部40の各部を制御する。
【0052】
通信制御部301は、モード選択スイッチ21で選択されたモード情報とエンコーダ制御部304で検出される操作情報を、シリアル通信により車両制御部10の通信制御部19に供給する。
【0053】
モータ駆動部303は、操作部40に反力トルクが作用するようにモータ314を駆動する。
エンコーダ制御部304は、信地回転モードにおいて、エンコーダ312で検出される電磁石311の回転量から操作部40の回転操作量を取得するとともに、平行移動モードにおいて、リニアボリュウム22〜29の検出値からステージ30の移動方向及び移動量を取得する。
【0054】
中心指定スイッチ検知部403は、ユーザによって指定された中心指定スイッチ45(45a〜45i)を検知する。
【0055】
電磁石駆動制御部305及び電磁石駆動制御部402は、それぞれ対になっている電磁石311と電磁石41を励磁する。
信地回転モードでは、中心指定スイッチ検知部403で検知した中心指定スイッチ45に対応する位置の電磁石311と電磁石41の1対が励磁される。
平行移動モードでは、4角の車輪位置に対応する電磁石の対311bと41b、311dと41d、311fと41f、311hと41hがそれぞれ励磁される。
【0056】
リニアアクチュエータ駆動制御部306は、リニアアクチュエータ32〜39を駆動する。信地回転モードでは、対角線上に対向する4角に配置されたリニアアクチュエータ33、37、35、39を駆動し、ステージ30が平行移動しないように固定する。平行移動モードでは、障害物検出部14で検出された障害物の存在を操作者に知らせるため、操作者が障害物方向に移動を指示した時、反力を与えたり振動を与えたりすることによって車両を移動させないように動作を制限するように駆動する。
【0057】
通信制御部307と通信制御部406は、シリアル通信により接続されている。
通信制御部307からはモード選択スイッチ21で選択されたモード情報が供給され、通信制御部406からは、中心指定スイッチ検知部403で検出された、ユーザが選択した中心指定スイッチ45の位置(回転中心位置)が供給される。
【0058】
表示制御部405は、表示部42に車両図43を表示すると共に、モードに応じて平行移動方向矢印44、中心指定スイッチ45の表示を行う。
また、信地回転モードにおいて中心指定スイッチ45a〜45iのうち、指定された中心指定スイッチ45の色を他と変更して表示することで、選択されている中心指定スイッチ45を明示する。
【0059】
電源部309、408は、それぞれステージ30と操作部40に必要な電力を供給するための電源である。
本実施形態では電源部309に大容量の電源が配置され、電源制御部308、トランス340、電源制御部407を介して電源部408を充電可能に構成されている。
【0060】
次に本実施形態の車両による独立操舵走行の操作ついて説明する。
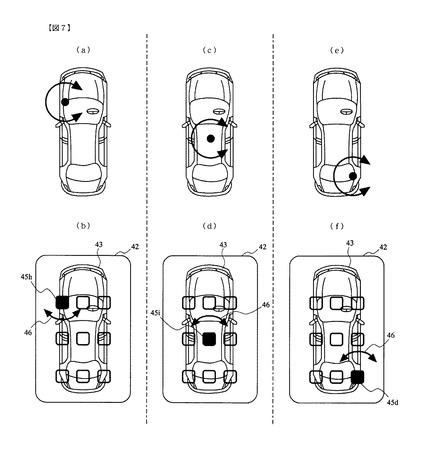
図7は、信地回転モードにおける、回転中心と表示部42の表示画像及び操作部40の操作を表したものである。
まず、図7(a)、(b)により左前方駆動輪位置を信地回転中心として選択する場合について説明する。
モード選択スイッチ21により信地回転モードが選択されると、選択されたモード情報は、ステージ部ECU300により、通信制御部310、通信制御部19を介して車両制御部10に供給されると共に、通信制御部307、通信制御部406を介して操作部ECU400に供給される。
【0061】
操作部ECU400は、信地回転モード情報の供給を受けると、表示制御部405により、表示部42に車両図43、及び、選択可能な中心指定スイッチ45a〜45iの9カ所が表示される(図4(b)参照)。車両図43には、運転席を明示するためのハンドル図が表示される。
【0062】
そして、ユーザにより中心指定スイッチ45hが指定(押下)されると、その指定を中心指定スイッチ検知部403で検知する。
操作部ECU400は、図7(b)に示されるように、検知した中心指定スイッチ45hを、表示制御部405により強調表示すると共に、操作部40の回転可能な方向を示す回転方向矢印46を表示する。
この中心指定スイッチ45hの強調表示と、回転方向矢印46の表示、及び車両図43によって、ユーザは、車両の信地回転中心とその回転動作をイメージすることができる。
【0063】
そしてこの後に説明するように、操作部40は、指定した中心指定スイッチ45h(信地回転中心)を中心として、左右方向に回転することができるため、ユーザは、信地回転における車両の動作と同一の動きで操作部40を動かすことで、自分のイメージ通りに車両を動かすことが可能になる。
【0064】
操作部ECU400は、検知した中心指定スイッチ45hの情報を、回転中心位置を示す情報として、通信制御部406、307を介してステージ部ECU300に供給する。
また、回転中心位置の情報は、ステージ部ECU300から通信制御部301、通信制御部19を介して車両制御部10に供給される。
【0065】
そして、検出した中心指定スイッチ45hに対応する電磁石41hと電磁石311hが、それぞれ電磁石駆動制御部402、305により励磁され、両者が電磁的にロックされる。
これにより、操作部40は、中心指定スイッチ45hを中心に回転方向矢印46方向に回転させることが可能になる。
【0066】
ユーザが操作部40を回転すると電磁石41hと電磁石311hが回転し、その回転方向と回転量がエンコーダ制御部304で検出され、操作情報としてステージ部ECU300から、車両制御部10に供給される。
車両制御部10では、供給された操作情報(回転方向と回転量)に従って、操舵機構制御部17により回転中心位置の駆動輪(図7(a)の例では、左前輪)以外の各駆動輪(右前輪と左右後輪)が回転中心方向と略直角となるように操舵され、駆動制御部18により回転方向に駆動輪が駆動されて車両が移動(信地回転)する。
なお、回転中心位置にある駆動輪については、ブレーキ等により回転しないように固定される。
【0067】
同様にして、車両領域の重心(車両の中心)を信地回転の回転中心として指定する場合、ユーザは、図7(d)に示されるように、中心指定スイッチ45iを指定することで、操作部40は、指定した中心指定スイッチ45iを中心に回転方向矢印46方向に回転可能になる。
そして、操作部40を回転させると、図7(c)に示されるように、車両領域の重心を信地回転の回転中心として4つの駆動輪が略直角方向に操舵され、操作された方向に駆動する。
また、車両の右後輪を信地回転の回転中心として指定する場合は、図7(f)、(e)に示されるように、同様に操作されることになる。
【0068】
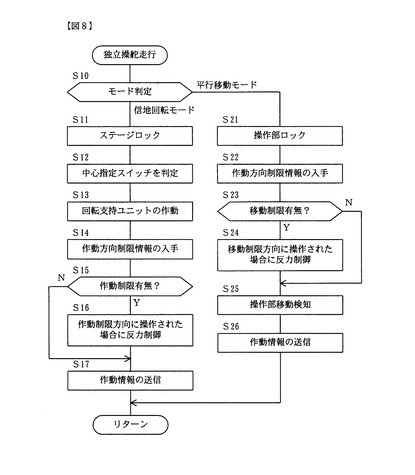
図8は、独立操舵走行における操作装置の動作を表したフローチャートである。
この独立操舵走行は、モード選択スイッチ21で独立操舵走行モードが選択されている場合に実行される。
まず操作装置は、モード選択スイッチ21で信地回転モードと平行移動モードのいずれが選択されているかを判断する(ステップ10)。
【0069】
信地回転モードが選択されている場合(ステップ10;信地回転モード)、ステージ30をロックし(ステップ11)、中心指定スイッチ検知部403で指定された中心指定スイッチ45を判定(検出)する(ステップ12)。
このステージ30のロックは、操作部40のロックと同様に電磁力によるロックでも、機械的なロックであってもよい。
【0070】
そして、指定された中心指定スイッチ45に対応する回転支持ユニット(回転支持ユニット本体31と電磁石41の対)を作動させる(ステップ13)。
すなわち、電磁石311、41を励磁して操作部40の回転中心をロックする。
【0071】
そして、ステージ部ECU300は、車両制御部10から作動方向制限情報を入手する(ステップ14)。
ここで、車両制御部10で取得する作動方向制限情報について説明する。
操作装置が車両制御部10から入手する回転方向制限情報は、障害物検出部14で検出された車両周辺に存在する障害物の有無とその距離から、車両制御部10で判定され、回転を制限する方向(障害物が存在する方向)で構成される。
【0072】
すなわち車両制御部10は、回転前の状態を基準とし、ステップ12で指定された中心指定スイッチ45に対応する位置を回転中心として、障害物に接触するまで信地回転させた場合の回転角度θ1を算出し、回転角度θ1が所定の基準値θ2(例えば、20度)以下である場合に、回転方向制限情報として回転できない方向を、ステージ部ECU300に供給する。
【0073】
ステージ部ECU300は、回転方向の作動制限があるか否かを判断し(ステップ15)、作動制限がある場合(ステップ15;Y)、制限された方向に操作部40が回転しないようにするため、モータ駆動部303を駆動して操作部40の反力制御を行う(ステップ16)。
すなわち、ステージ部ECU300は、操作部40が回転制限方向に操作された場合に、回転操作方向と逆方向のトルクを発生させることで、障害物方向への操作ができないことをユーザに告知する。
なお、反力トルクだけでなく、振動により該当方向への回転操作が制限がされていることを告知するようにしてもよい。
【0074】
ついでステージ部ECU300は、エンコーダ制御部304で操作部40の回転操作による回転方向と回転量を検出し、作動情報として車両制御部10に出力して(ステップ17)、メインルーチンにリターンする。
【0075】
一方、平行移動モードが選択された場合(ステップ10;平行移動モード)、電磁石311、41の対4組(4角部分)を励磁することで、操作部40をステージ30にロックする(ステップ21)。
そして、ステージ部ECU300は、作動方向制限情報を車両制御部10から入手する(ステップ22)。
操作装置が入手する作動方向制限情報は、障害物検出部14で検出された車両周辺に存在する障害物の有無とその距離から、車両制御部10で判定され、平行移動を制限する方向(障害物が存在する方向)が供給される。
【0076】
すなわち車両制御部10は、車両から検出した障害物までの距離L1が所定値L2(例えば、40cm)以下である場合に、作動方向制限情報として移動できない方向を操作装置に供給する。
【0077】
ステージ部ECU300は、平行移動の制限があるか否かを判断し(ステップ23)、移動制限がある場合(ステップ23;Y)、制限された方向に操作部40が移動しないようにするため、操作部40がロックされているステージ30に対して対して反力制御を行う(ステップ24)。
なお、反力制御とともに、振動により該当方向への傾斜操作が制限されていることを告知するようにしてもよい。
【0078】
ついでステージ部ECU300は、エンコーダ制御部304により、操作部40の移動方向と移動量を検出し(ステップ25)、作動情報として車両制御部10に出力(送信)して(ステップ26)、メインルーチンにリターンする。
【0079】
ステージ部ECU300から作動情報が出力されると、車両制御部10は、操舵機構制御部17により、信地回転であればステップ12で出力されている回転中心に従って、回転中心と一致している駆動輪を除く駆動輪について操舵し、平行移動であれば全車輪を移動方向と平行な方向に操舵する。
そして、車両制御部10は、駆動制御部18により作動情報に応じた方向、車速となるように駆動輪を駆動する。
【0080】
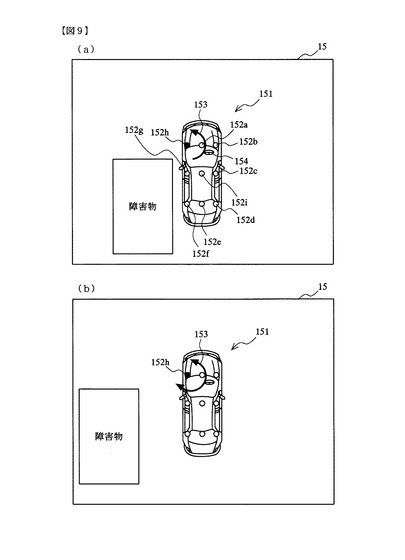
図9は、独立操舵走行モードにおける表示装置15の表示画像を表したものである。
この図9(a)に示されるように、独立操舵走行モードが選択されると、車両制御部10は、車両図151と、障害物検出部14で検出した車両周辺の障害物を表示装置15に表示する。
そして、さらに信地回転モードが選択されると、車両制御部10は、信地回転として選択可能な9カ所の回転中心152a〜152i(表示部42に表示される中心指定スイッチ45a〜45iに対応)を表示する。
【0081】
ついで、中心指定スイッチ45が指定され、通信制御部301を介して回転中心が出力されると、車両制御部10は、図9(a)に示されるように、確定した回転中心(図9(a)では、152h)を強調表示する。この際選択されていない回転中心については表示を消去してもよい。
そして車両制御部10は、回転前の状態を基準とし、障害物に接触するまで確定した回転中心で信地回転させた場合の回転角度θ1を算出し、算出した回転角度θ1の大きさに応じて、回転方向153を表示する。
【0082】
図9(a)に示した例では、指定された左前方の回転中心152hを中心として、右回転をした場合の回転角度θ1が所定角度θ2以下であるので、操作部40の右回転がモータ駆動部303の反力トルクにより制限されると共に、車両制御部10は、表示装置15に左回転方向の矢印で回転方向153を表示する。
【0083】
そして、両方向に回転可能である場合、車両制御部10は、図9(b)に示すように、回転方向153の両端に矢頭を表示することで、両方向に回転可能であることを明示する。
回転方向153の矢印については、回転可能な角度θ3(<θ1)に応じて長さを変えるようにしてもよい。すなわち、図9(b)に示されるように、障害物がある側に回転する方向の矢印(図では右回り方向の矢印)を、障害物がない場合に比べて短く表示する。
なお、角度θ3は、θ1−5度に設定されているが、車体と障害物との最短距離が所定距離L3(例えば、40cm)となるまでの角度としてもよい。
【0084】
以上説明したように本実施形態によれば、独立操舵モードにおいて、信地回転及び平行移動における車両の実際と同様に操作部を操作するように構成することで、独立操舵における車両の動きを容易かつ正確に認識することができる。
【0085】
なお、説明した実施形態では、車輪位置や車輪間を信地回転位置として指定するする場合について説明したが、車両の角やその中間を信地回転の中心として指定及び回転可能に構成してもよい。
また説明した実施形態では、回転中心と略直角方向に各車輪を操舵させることで信地回転を行う場合について説明したが、車輪を操舵させず、回転数の制御により旋回(信地回転)するようにしてもよい。また、車輪の操舵と回転数制御の双方により信地回転を行うようにしてもよい。
【図面の簡単な説明】
【0086】
【図1】本実施形態における操作装置の外観構成図である。
【図2】操作部を回転及び水平面上で平行移動させる操作装置の概略構成を表した平面図及び断面図である。
【図3】回転支持ユニット及びリニアセンサの構成を表した説明図である。
【図4】操作部に配置された表示部の表示状態を表した説明図である。
【図5】本実施形態の車両における制御系の構成図である。
【図6】操作装置における制御系の構成図である。
【図7】信地回転モードにおける、回転中心と表示部の表示画像及び操作部の操作を表した説明図である。
【図8】独立操舵走行における操作装置の動作を表したフローチャートである。
【図9】独立操舵走行モードにおける表示装置の表示画像を表した説明図である。
【符号の説明】
【0087】
10 車両制御部
11 現在位置検出装置
12 地図データ
13 車速センサ
14 障害物検出部
15 表示装置
16 入力装置
17 操舵機構制御部
18 駆動制御部
19 通信制御部
20 ケーシング
21 モード選択スイッチ
22〜29 リニアボリュウム
30 ステージ
31 回転支持ユニット本体
32〜39 リニアアクチュエータ
311 電磁石
312 エンコーダ
313 ギヤヘッド
314 モータ
40 操作部
41 電磁石
42 表示部
43 車両図
【技術分野】
【0001】
本発明は、車両の操作装置に係り、詳細には複数車輪の全てを独立して操舵可能な複数輪独立操舵車両の操作装置に関する。
【背景技術】
【0002】
4輪の操舵が可能な車両についての操舵システムについて、特許文献1で提案されている。
この特許文献1では、その操舵システムとして旋回方向を指示する旋回摘み及び、傾けた向きと量によって移動方向と速度を指示する操作レバーとにより、旋回等の操作を行うようになっている。
この旋回摘みと操作レバーの操作により、通常の2輪操舵車のような動きや、前後・左右などの平行移動の指示を容易に行うことができる。
【特許文献1】特開平4−287776号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかし、特許文献1記載の操舵方法の場合、任意の点を中心にして回転するためには旋回摘みと操作レバーとを連携させた複雑な操作が必要である。
特に、各車輪位置で囲まれた領域(以下、車両領域という)内の特定点を回転中心として回転する信地回転を行う場合、旋回摘みと操作レバーによる高度な操作技術を必要とする。
このため、特許文献1記載の操舵システムでは、運転者が回転中心を選択することが困難であった。
【0004】
また、従来の自動車は、車両外に回転中心点が存在するため、運転者は、車両外の点を中心に大きな円弧で回転する動きのイメージと、その操舵に慣れている。
しかし、4輪独立操舵車において、信地回転を行う場合、車両の動きを正確にイメージできない。
このため、車両周辺に障害物が存在する場合に、信地回転による動きをイメージできないために、衝突(接触)するか否かの判断を正確にできない場合がある。
【0005】
そこで本発明は、複数輪を独立して操舵可能な車両において、4輪を独立して操舵する独立操舵走行の操作を容易に行うことが可能な車両の操作装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
(1)請求項1に記載した発明では、複数車輪を備え、各車輪が独立して制御可能な車両の操作装置であって、平行移動する平行移動モードと、所定の地点を回転中心として回転する信地回転モードを選択するモード選択手段と、前記選択されたモードに対応して、車両の移動を指示する操作部と、前記操作部に配置され、前記信地回転モードにおける回転中心を指定する回転中心指定手段と、前記選択されたモードを示すモード情報と、前記操作部による操作情報を出力する操作情報出力手段とを備え、前記操作部は、前記平行移動モードにおいて水平方向に移動可能であり、前記信地回転モードにおいて指定された回転中心を中心として回転可能に構成されている、ことで前記目的を達成する。
(2)請求項2に記載した発明では、請求項1に記載の車両の操作装置において、前記回転中心指定手段は、車両の各車輪位置、全車輪の中心位置、及び隣接する2車輪の中心位置に対応する指定点を備え、いずれか1の指定点を回転中心として指定し、前記操作部は、前記指定された指定点を中心に回転可能である、ことを特徴とする。
(3)請求項3に記載した発明では、請求項2に記載の車両の操作装置において、装置本体と、前記装置本体内に水平方向に移動可能に収容され上部に前記操作部が配置されるステージと、前記各指定点に対応して前記操作部に配置され、前記指定された前記指定点に対応して励磁されると共に、励磁状態で前記操作部の回転に伴い回転する複数の操作部電磁石と、前記各操作部電磁石に対応して前記ステージに配設され、前記指定された指定点に対応して励磁されることで、対応する操作部電磁石の回転に伴い回転するステージ電磁石と、前記各ステージ電磁石の回転量を検出する回転量検出手段と、前記ステージの移動方向と移動量の少なくとも一方を検出する水平方向移動量検出手段と、を備え、前記操作情報出力手段は、信地回転モードの場合、指定された指定点と前記検出した回転量を操作情報として、平行移動モードの場合、前記検出したステージの移動方向と移動量を操作情報として、出力する、ことを特徴とする。
(4)請求項4に記載した発明では、請求項3に記載の車両の操作装置において、前記平行移動モードにおいて、少なくとも2つの前記操作部電磁石及びこれと対応するステージ電磁石が励磁されることで、前記操作部とステージが固定されることを特徴とする。
(5)請求項5に記載した発明では、複数の車輪を備え、各車輪が独立して制御可能な車両の操作装置であって、所定の地点を回転中心として回転する信地回転モードを選択するモード選択手段と、操作部に配置され、前記信地回転モードにおける回転中心を指定する回転中心指定手段と、上部に前記操作部が配置されるステージと、前記各指定点に対応して前記操作部に配置され、前記指定された前記指定点に対応して励磁されると共に、励磁状態で前記操作部の回転に伴い回転する複数の操作部電磁石と、前記各操作部電磁石に対応して前記ステージに配設され、前記指定された指定点に対応して励磁されることで、対応する操作部電磁石の回転に伴い回転するステージ電磁石と、前記各ステージ電磁石の回転量を検出する回転量検出手段と、を備えたことを特徴とする。
(6)請求項6に記載した発明では、請求項5に記載の車両の操作装置において、前記モード選択手段は平行移動する平行移動モードをさらに有し、前記ステージを水平方向に移動可能に収容した装置本体と、前記ステージの移動方向と移動量の少なくとも一方を検出する水平方向移動量検出手段と、を備え、前記操作情報出力手段は、信地回転モードの場合、指定された指定点と前記検出した回転量を操作情報として平行移動モードにおいて、前記検出された指定点と前記検出した回転量を操作情報として、出力することを特徴とする。
【発明の効果】
【0007】
本発明によれば、操作部が、平行移動モードにおいて水平方向に移動可能であり、信地回転モードにおいて指定された回転中心を中心として回転可能に構成されているので、独立操舵走行の操作を容易に行うことができる。
【発明を実施するための最良の形態】
【0008】
以下、本発明の車両における好適な実施形態について、図1から図9を参照して詳細に説明する。
(1)実施形態の概要
本実施形態の車両は、4輪独立操舵車両が対象であり、4つの駆動輪(車輪)のそれぞれにモータが配置されると共に、独立して操舵可能に構成されている。
そして、独立操舵走行は、主として駐車等における短距離の車両移動に使用され、所定速度(例えば、4km/h)以下の速度で移動するように各駆動輪が駆動制御される。
独立操舵走行における走行には、車両領域内を回転中心として回転する信地回転(その場での回転)と、平行移動(全ての駆動輪が同一方向を向いての移動)とがある。
【0009】
通常の走行を行う通常走行モードと、駐車時等の独立操舵走行モードとは、モード選択スイッチで選択される。更にモード選択スイッチにより、独立操舵走行における信地回転と平行移動のいずれかが選択されるようになっている。
【0010】
本実施形態における車両の操作装置では、操作部の操作により平行移動と信地回転(その場での回転)の操作を行う。
操作部は、信地回転の操作の場合、操作部で回転中心を指定し、その指定した回転中心を中心として回転可能に構成される。
操作部は、平行移動の操作の場合、操作部を移動したい方向、すなわち、水平面上の前後、左右、斜めの方向に移動可能に構成される。
このように、操作装置は、操作部の動きを、平行移動、信地回転といった独立操舵固有の動きと一致させているので、操作者は、車両の動きをイメージしながら操作することが可能になる。
【0011】
本実施形態の操作装置で指定可能な回転位置は、各駆動輪の位置4カ所、隣接する駆動輪間の中心位置4カ所、及び、車両領域の重心位置1カ所、の合計9カ所であり、操作部上部に配置された指定ボタンにより指定される。
そして、指定位置を中心として操作部を右、又は左方向に回すことで、回転方向を選択する。
【0012】
車両制御部では、回転中心が選択されると、回転中心位置にない各駆動輪について、各駆動輪を選択された回転中心の方向と略直角方向に操舵する。この場合の「略直角」方向は、回転中心の方向に対して正確に直角となる方向を含み、該正確な直角方向に操舵可能な場合には正確に直角な方向を意味し、駆動輪の操舵機構上の制限から正確に直角方向とすることができない場合には、機構上可能な最も直角に近い最大の角度をいう。
車両制御部は、回転方向が選択され駆動輪の操舵完了後に、選択された回転方向に駆動輪を駆動することで、指定された回転中心を中心にした信地回転が行われる。
【0013】
一方、平行移動モードが選択された場合には、選択された移動方向に各駆動輪を操舵した後駆動輪を駆動することで、前後、左右、駆動輪の方向の合計8方向に平行移動する。
【0014】
(2)実施形態の詳細
図1は、本実施形態における操作装置の外観構成を表したものである。
この図1に示されるように、操作装置は、モード選択スイッチ21が配置され、中央上部が開口したケーシング20と、ケーシング20内に収容されるステージ30と、ケーシング20の開口内でステージ30上に配設され、ステージ30に対して回転及び固定可能に配設される操作部40とから構成されている。
操作部40の上面には、液晶表示装置からなる表示部42が配設され、この表示部42には、車両図43が表示される。表示部42の上面には、タッチパネルが配設される。
【0015】
図2は、操作部を回転及び水平面上で平行移動させる操作装置の概略構成を表した平面図及び断面図である。図2(b)は図2(a)のA−A断面を表したものである。
図2に示されるように、操作部40の表示部42と反対側の内部には、信地回転の中心として指定可能な9カ所に対応して9個の電磁石41a、41b、〜41i(以下、操作部40の電磁石全体、又は一般を指す場合には41と表記する)が3行3列に配置されている。
【0016】
信地回転モードが選択された場合、指定された信地回転の回転中心に対応する電磁石41が励磁される。
一方、平行移動モードが選択された場合、本実施形態では、各車輪位置に対応する4角の電磁石41b、41d、41f、41hの4つが励磁されることで、操作部40がステージ30に磁気力により固定される。
なお、平行移動モードでは、少なくとも2つの電磁石41が励磁されるようにしてもよい。2つの場合、対角位置にある電磁石41を励磁するのが好ましい。
【0017】
ステージ30の操作部40と反対側には、ケーシング20内に収容される状態で、9個の回転支持ユニット本体31a、31b、〜31iが固定されている。
9個の回転支持ユニット本体31a、31b、〜31iは、それぞれ、操作部40の電磁石41a、41b、〜41iに対応して、対抗配置されている。
各回転支持ユニット本体31a、31b、〜31iは、それぞれ電磁石41a、41b、〜41iと対をなしており、各対は、回転支持ユニットを構成している。
【0018】
ステージ30の下面には、8個のリニアアクチュエータ32、33、〜39が配置されている。
一方、ケーシング20の開口部外周の上面部下側には、リニアアクチュエータ32、33、〜39の各々に対抗してリニアボリュウム22、23、〜29が配設されている。
【0019】
リニアアクチュエータとリニアボリュウムの組33と23、34と24、37と27、38と28は、ステージ30(及びこれに固定された操作部40)の左右方向の移動量を検出する。
また、リニアアクチュエータとリニアボリュウムの組32と22、35と25、36と26、39と29は、ステージ30(及びこれに固定された操作部40)の前後方向の移動量を検出する。
リニアアクチュエータとリニアボリュウムの組はリニアセンサを構成し、両者が対抗する方向と直交する方向の移動量を検出する。
【0020】
図3は、回転支持ユニット及びリニアセンサの構成を表したものである。
図3(a)は、回転支持ユニット本体31の構成を表したものである。
回転支持ユニット本体31は、操作部40の電磁石41と接した状態で配置される電磁石311、エンコーダ312、ギヤヘッド313、モータ314で構成され、それぞれ、同軸上に連結されている。
【0021】
電磁石311は、複数極(本実施形態では4極)に構成され、上面が平らになっている。電磁石311は、その上部に配置される操作部40の電磁石41の回転に伴い回転する。
エンコーダ312は、電磁石311の回転量を検出する。
【0022】
モータ314は、エンコーダ312で検出した回転方向と逆方向に回転することで、その回転力が反力として、ギヤヘッド313、エンコーダ312、電磁石311を介して、電磁石41に伝わり、更に操作部40に伝達される。
すなわち、モータ314による反力が操作部40に作用することで、操作部40による所定量以上の回転が制限される。モータ314による反力は、例えば、車両周辺に存在する障害物が検知された場合に、信地回転により障害物と接触する可能性がある場合に出力されるようになっている。
なお、ギヤヘッド313は、モータの負荷を調整するためのもので、スリップギヤ、トルククラッチ等が使用される。
【0023】
図3(b)は、操作部40の電磁石41の外観を表したものである。
この図3(b)に示されるように、電磁石41は、電磁石311の極数と同一極数に構成されて、本実施形態では4極である。
そして、電磁石41の電磁石311と対抗する側の面は凸曲面状に形成されており、これにより操作部の回転を滑らかにすることができる。
対を構成する回転支持ユニットの電磁石311と電磁石41は同一のタイミングで励磁されることで、両者の電磁力によりステージ30と操作部40とが固定される。
【0024】
そして、信地回転モードでは指定された回転中心に対応する1対の電磁石311と電磁石41が励磁されることで、その回転支持ユニットを中心に操作部40が回転する。操作部40の回転と一体的に電磁石41が回転し、電磁石41の回転量に応じて電磁石311が回転し、電磁石311の回転量がエンコーダ312により操作部40の回転量として検出されることになる。
【0025】
一方、平行移動モードでは、車輪位置に対応する4角の回転支持ユニットの電磁石311と電磁石41の4組が励磁されることで、操作部40とステージ30とが固定される。
これにより、操作部40は、回転することなく、所望の方向に水平移動させることが可能になる。
【0026】
図3(c)は、リニアアクチュエータ32とリニアボリュウム22の組を例としてリニアセンサの構成を表したものである。
ステージ30と操作部40とが固定された状態で操作部40が移動されると、ステージ30に配置されたリニアアクチュエータ32も移動し、その移動量がリニアボリュウム22で検出される。
ステージ30及び操作部40の斜め方向の移動量は、前後方向及び左右方向の両移動量から算出される。
【0027】
図4は、操作部40に配置された表示部42の表示状態を表したものである。
この図4に示されるように、表示部42には、車両の形状を表した車両図43が表示されている。車両図43は、常時表示されていても、独立操舵走行モードが選択された場合に表示されるようにしても、また、表示画面上に印刷等により描かれていてもよい。
【0028】
図4(a)は、モード選択スイッチ21で平行移動モードが選択された場合の表示部42の表示状態を表したものである。
この図4(a)に示されるように、平行移動モードが選択されると、車両図43と共に、平行移動可能な8方向を示す平行移動方向矢印44が表示される。
この平行移動方向矢印44は、前方向矢印44a、右前方向矢印44b、右方向矢印44c、右後方向矢印44d、後方向矢印44e、左後方向矢印44f、左方向矢印44g、左前方向矢印44hで構成される。
【0029】
本実施形態における平行移動モードにおいて、車両は平行移動方向矢印44で示される8方向にのみ移動可能に構成されている。
一方、平行移動モードにおいて操作部40は、8方向に限定されず任意の方向に移動可能であるが、車両図43と共に平行移動可能な8方向が表示部42に表示されることで、ユーザは、移動させたい方向に対応する矢印方向に操作部を移動しやすくなる。
操作部40の移動方向は、リニアセンサ(リニアアクチュエータとリニアボリウムの組み)で検出され、8方向の矢印の間の方向に操作部40が移動した場合には、8方向矢印44との角度が最も小さい方向に決定される。
【0030】
なお、本実施形態では、平行移動モードにおいて車両は8方向に限定して平行移動するように構成されているが、任意の角度方向に移動する操作部40に対応する角度方向、即ち任意の方向に平行移動可能に構成してもよい。
【0031】
図4(b)は、モード選択スイッチ21で信地回転モードが選択された場合の表示部42の表示状態を表したものである。
この図4(b)に示されるように、信地回転モードが選択されると、車両図43上に回転中心位置を選択するための中心指定スイッチ45a、45b、〜45iが表示される。
9個の中心指定スイッチ45a〜45iの下側には、それぞれ対応する位置に電磁石41a〜41iが配置されている。
信地回転モードにおいて、中心指定スイッチ45が選択されると、対応する電磁石41と電磁石311が励磁され、選択された中心指定スイッチ45の位置を中心に操作部40を回転することができる。
【0032】
本実施形態において操作装置は、運転席と助手席の間に配置されているが、ダッシュボードでハンドルの右又は左側、ハンドルの中心等、任意の場所に配置するようにしてもよい。
【0033】
上述したようにモードの選択は、通常走行モードと独立操舵走行モードとの選択(走行モードの選択)、及び独立操舵走行モードにおける信地回転モードと平行移動モードとの選択がある。
本実施形態におけるモード選択スイッチ21には、通常走行モードスイッチ、独立操舵走行モードにおける信地回転モードスイッチ、独立操舵走行モードにおける平行移動モードスイッチの3つのスイッチが配置され、いずれか1つを選択するようになっている。
【0034】
なお、モード選択スイッチ21は、走行モードを選択した後に、信地回転モードと平行移動モードの選択をするように構成してもよい。
また、モード選択スイッチ21は、スイッチを1つ配置し、選択(押下)される毎に、通常走行モード、信地回転モード、平行移動モードが順次切り替わって選択されるようにしてもよい。
また、ケーシング20に信地回転モードと平行移動モードを選択するスイッチを配置し、走行モードを選択するスイッチを別にハンドル周辺に配置するようにしてもよい。
【0035】
なお、本実施形態では、操作部40の回転操作は、回転方向を指示すると共に、回転量に応じた車両の速度を指示する。この点、平行移動における移動操作も同様に、平行移動の方向と、操作量(移動量)に応じた車両の速度を指示するものである。
この場合、独立操舵走行における車両の回転又は平行移動は、所定速度v1(例えば、4km/h)を最大値とし、回転操作の操作量(操作部40の回転角度)に応じて速度0km/hから速度v1の間の車速で移動するように駆動制御部18で制御される。
ただし、回転操作は回転方向だけを指示し、車速は予め決められた一定速度v2とすることも可能である。
【0036】
図5は、本実施形態の車両における制御系の構成を表したものである。
なお、本実施形態における車両の各機構等については、公知の4輪独立操舵車両に使用されている構成が採用されている。
【0037】
図5に示されるように、本実施形態の車両は、車両制御部10、現在位置検出装置11、地図データ12、車速センサ13、障害物検出部14、表示装置15、入力装置16、操舵機構制御部17、駆動制御部18、通信制御部19、及びその他の各種装置、制御部等を備えている。
【0038】
車両制御部10は、ECU(電子制御装置)、ROM、RAM等から構成されたコンピュータシステムで構成されている。
車両制御部10は、通常走行モードにおける車両の走行制御機能、現在位置検出を含むナビゲーション機能(現在位置表示、目的地設定、経路探索、経路案内等を含む)、独立操舵走行モードにおける独立操舵走行制御機能を実現するための、各種プログラム及びデータがROM及びRAMに格納されている。
【0039】
なお、ナビゲーション機能、及び独立操舵走行制御機能の一部を、それぞれ別のECUとROM、RAMにより実現し、各ECU間は各々の検出信号や判断結果等の各種データや指令信号を通信により共有する、という構成にしてもよい。
【0040】
現在位置検出装置11は、車両の現在位置(緯度、経度からなる絶対座標値)を検出する装置である。
現在位置検出装置11は、人工衛星を利用して車両の位置を測定するGPS(Global Positioning Systems)センサを備えている。
なお、現在位置検出装置11は、GPSセンサによる現在位置検出を補足する装置として、車速センサ、ジャイロセンサを備えている。
更に、地磁気を検出して車両の方位を求める地磁気センサ等を備えるようにしてもよい。
【0041】
地図データ12は、地図情報、道路情報等の各種地図に関連した情報が格納されたデーターベースである。
道路情報は、現在位置検出装置11で検出された車両の現在位置と道路情報とのマップマッチングにより現在走行中の道路及び該道路上の位置を検出するのに使用される。
なお、地図データ12は、車両の現在地周辺や目的地周辺等の各種地図や道路を表示装置に表示するために地図情報が使用され、目的地までの経路探索に道路情報が使用される。
地図データ12には、さらに各施設に対する情報が格納された施設情報(POI情報)等も格納されている。
【0042】
車速センサ13は、車両の現在速度を検出するが、現在位置検出装置11における車速センサと共有するようにしてもよい。
【0043】
障害物検出部14は、赤外線(IR)センサや超音波センサ等のセンサを複数備えており、各センサが車両外周に配置されている。
そして、駐車場内などの低速走行時において、死角を含めた車両周囲をセンシングし、車両周囲に存在する、通行の妨げとなるもの(障害物、人、溝等)を検知する。
赤外線センサとしては、周囲と温度差がある人(物)が動く際におこる赤外線の変化から人を検出する焦電型ひと検出センサが使用される。このように、焦電型ひと検出センサと超音波センサの両検出結果から、車両周辺に存在するものが人か、物かを判断することが可能になる。
また、障害物検出部14は、1又は複数の撮像装置と画像認識処理部とを備えており、車両の周辺全周を撮像し、その撮像画像から障害物を認識するようにしてもよい。
なお、障害物までの距離については、超音波センサで検出される。
表示装置15には、液晶表示装置、CRT、ヘッドアップディスプレイ等の各種表示装置が使用される。
【0044】
表示装置15には、ナビゲーション機能において、現在位置検出装置11で検出した車両の現在位置周辺の地図が地図データ12から読み出されて表示され、該地図上に車両の現在位置が表示される。また、目的地までの走行経路が探索されている場合には、案内中の走行経路も表示されるようになっている。
【0045】
入力装置16には、タッチパネル(スイッチとして機能)、キーボード、マウス、ライトペン、ジョイスティック、赤外線等によるリモコン、表示装置15の表示画面に取り付けられたタッチパネル、リモコン、音声認識装置などの各種の装置が使用可能であり、各種情報を入力するための入力手段を構成する。
入力装置16は、本実施形態において目的地の設定等に使用される。
なお、入力装置16によりモード選択を行うようにしてもよい。
【0046】
操舵機構制御部17は4つの各駆動輪を各々独立して操舵し、駆動制御部18は各駆動輪の駆動を制御する。
操舵機構制御部17及び駆動制御部18により操舵及び駆動が制御される各駆動輪の操舵機構及び駆動機構については、例えば、操舵機構として特開2001−322557公報に記載された機構等の各種機構を採用することが可能である。
【0047】
通信制御部19は、操作装置の通信制御部301(後述)と接続されている。
通信制御部19は、操作装置からモード選択スイッチ21で選択されたモードを示すモード情報と、そのモードにおける操作量を示す操作情報をシリアル通信により受信して、車両制御部10に供給するようになっている。
【0048】
その他、本実施形態の車両では、図示しないが、車内に配置された複数のスピーカ及び音声制御装置で構成された音声出力装置や、音声認識装置等が配置されている。
音声出力装置は、独立操舵走行において障害物と車両との距離が所定距離以下となった場合に、警告音声や警告音を出力するようになっている。
【0049】
図6は、操作装置における制御系の構成を表したものである。
図6に示されるように、操作装置は、ステージ30の制御系と、操作部40の制御系から構成されており、両者間は通信制御部307、406によるシリアル通信により相互のデータが通信されるようになっている。
【0050】
ステージ30側は、ステージ部ECU300と、通信制御部301、ROM302、モータ駆動部303、エンコーダ制御部304、電磁石駆動制御部305、リニアアクチュエータ駆動制御部306、通信制御部307、電源制御部308、電源部309を備えている。
一方、操作部40側は、操作部ECU400、ROM401、電磁石駆動制御部402、中心指定スイッチ検知部403、表示部42、表示制御部405、通信制御部406、電源制御部407、電源部408を備えている。
走査装置は、両電源制御部308、407間での電力授受を行うトランス340を備えている。
【0051】
ステージ部ECU300は、ROM302に格納されたプログラムに従って、ステージ30の各部を制御する。
操作部ECU400は、ROM401に格納されたプログラムに従って、操作部40の各部を制御する。
【0052】
通信制御部301は、モード選択スイッチ21で選択されたモード情報とエンコーダ制御部304で検出される操作情報を、シリアル通信により車両制御部10の通信制御部19に供給する。
【0053】
モータ駆動部303は、操作部40に反力トルクが作用するようにモータ314を駆動する。
エンコーダ制御部304は、信地回転モードにおいて、エンコーダ312で検出される電磁石311の回転量から操作部40の回転操作量を取得するとともに、平行移動モードにおいて、リニアボリュウム22〜29の検出値からステージ30の移動方向及び移動量を取得する。
【0054】
中心指定スイッチ検知部403は、ユーザによって指定された中心指定スイッチ45(45a〜45i)を検知する。
【0055】
電磁石駆動制御部305及び電磁石駆動制御部402は、それぞれ対になっている電磁石311と電磁石41を励磁する。
信地回転モードでは、中心指定スイッチ検知部403で検知した中心指定スイッチ45に対応する位置の電磁石311と電磁石41の1対が励磁される。
平行移動モードでは、4角の車輪位置に対応する電磁石の対311bと41b、311dと41d、311fと41f、311hと41hがそれぞれ励磁される。
【0056】
リニアアクチュエータ駆動制御部306は、リニアアクチュエータ32〜39を駆動する。信地回転モードでは、対角線上に対向する4角に配置されたリニアアクチュエータ33、37、35、39を駆動し、ステージ30が平行移動しないように固定する。平行移動モードでは、障害物検出部14で検出された障害物の存在を操作者に知らせるため、操作者が障害物方向に移動を指示した時、反力を与えたり振動を与えたりすることによって車両を移動させないように動作を制限するように駆動する。
【0057】
通信制御部307と通信制御部406は、シリアル通信により接続されている。
通信制御部307からはモード選択スイッチ21で選択されたモード情報が供給され、通信制御部406からは、中心指定スイッチ検知部403で検出された、ユーザが選択した中心指定スイッチ45の位置(回転中心位置)が供給される。
【0058】
表示制御部405は、表示部42に車両図43を表示すると共に、モードに応じて平行移動方向矢印44、中心指定スイッチ45の表示を行う。
また、信地回転モードにおいて中心指定スイッチ45a〜45iのうち、指定された中心指定スイッチ45の色を他と変更して表示することで、選択されている中心指定スイッチ45を明示する。
【0059】
電源部309、408は、それぞれステージ30と操作部40に必要な電力を供給するための電源である。
本実施形態では電源部309に大容量の電源が配置され、電源制御部308、トランス340、電源制御部407を介して電源部408を充電可能に構成されている。
【0060】
次に本実施形態の車両による独立操舵走行の操作ついて説明する。
図7は、信地回転モードにおける、回転中心と表示部42の表示画像及び操作部40の操作を表したものである。
まず、図7(a)、(b)により左前方駆動輪位置を信地回転中心として選択する場合について説明する。
モード選択スイッチ21により信地回転モードが選択されると、選択されたモード情報は、ステージ部ECU300により、通信制御部310、通信制御部19を介して車両制御部10に供給されると共に、通信制御部307、通信制御部406を介して操作部ECU400に供給される。
【0061】
操作部ECU400は、信地回転モード情報の供給を受けると、表示制御部405により、表示部42に車両図43、及び、選択可能な中心指定スイッチ45a〜45iの9カ所が表示される(図4(b)参照)。車両図43には、運転席を明示するためのハンドル図が表示される。
【0062】
そして、ユーザにより中心指定スイッチ45hが指定(押下)されると、その指定を中心指定スイッチ検知部403で検知する。
操作部ECU400は、図7(b)に示されるように、検知した中心指定スイッチ45hを、表示制御部405により強調表示すると共に、操作部40の回転可能な方向を示す回転方向矢印46を表示する。
この中心指定スイッチ45hの強調表示と、回転方向矢印46の表示、及び車両図43によって、ユーザは、車両の信地回転中心とその回転動作をイメージすることができる。
【0063】
そしてこの後に説明するように、操作部40は、指定した中心指定スイッチ45h(信地回転中心)を中心として、左右方向に回転することができるため、ユーザは、信地回転における車両の動作と同一の動きで操作部40を動かすことで、自分のイメージ通りに車両を動かすことが可能になる。
【0064】
操作部ECU400は、検知した中心指定スイッチ45hの情報を、回転中心位置を示す情報として、通信制御部406、307を介してステージ部ECU300に供給する。
また、回転中心位置の情報は、ステージ部ECU300から通信制御部301、通信制御部19を介して車両制御部10に供給される。
【0065】
そして、検出した中心指定スイッチ45hに対応する電磁石41hと電磁石311hが、それぞれ電磁石駆動制御部402、305により励磁され、両者が電磁的にロックされる。
これにより、操作部40は、中心指定スイッチ45hを中心に回転方向矢印46方向に回転させることが可能になる。
【0066】
ユーザが操作部40を回転すると電磁石41hと電磁石311hが回転し、その回転方向と回転量がエンコーダ制御部304で検出され、操作情報としてステージ部ECU300から、車両制御部10に供給される。
車両制御部10では、供給された操作情報(回転方向と回転量)に従って、操舵機構制御部17により回転中心位置の駆動輪(図7(a)の例では、左前輪)以外の各駆動輪(右前輪と左右後輪)が回転中心方向と略直角となるように操舵され、駆動制御部18により回転方向に駆動輪が駆動されて車両が移動(信地回転)する。
なお、回転中心位置にある駆動輪については、ブレーキ等により回転しないように固定される。
【0067】
同様にして、車両領域の重心(車両の中心)を信地回転の回転中心として指定する場合、ユーザは、図7(d)に示されるように、中心指定スイッチ45iを指定することで、操作部40は、指定した中心指定スイッチ45iを中心に回転方向矢印46方向に回転可能になる。
そして、操作部40を回転させると、図7(c)に示されるように、車両領域の重心を信地回転の回転中心として4つの駆動輪が略直角方向に操舵され、操作された方向に駆動する。
また、車両の右後輪を信地回転の回転中心として指定する場合は、図7(f)、(e)に示されるように、同様に操作されることになる。
【0068】
図8は、独立操舵走行における操作装置の動作を表したフローチャートである。
この独立操舵走行は、モード選択スイッチ21で独立操舵走行モードが選択されている場合に実行される。
まず操作装置は、モード選択スイッチ21で信地回転モードと平行移動モードのいずれが選択されているかを判断する(ステップ10)。
【0069】
信地回転モードが選択されている場合(ステップ10;信地回転モード)、ステージ30をロックし(ステップ11)、中心指定スイッチ検知部403で指定された中心指定スイッチ45を判定(検出)する(ステップ12)。
このステージ30のロックは、操作部40のロックと同様に電磁力によるロックでも、機械的なロックであってもよい。
【0070】
そして、指定された中心指定スイッチ45に対応する回転支持ユニット(回転支持ユニット本体31と電磁石41の対)を作動させる(ステップ13)。
すなわち、電磁石311、41を励磁して操作部40の回転中心をロックする。
【0071】
そして、ステージ部ECU300は、車両制御部10から作動方向制限情報を入手する(ステップ14)。
ここで、車両制御部10で取得する作動方向制限情報について説明する。
操作装置が車両制御部10から入手する回転方向制限情報は、障害物検出部14で検出された車両周辺に存在する障害物の有無とその距離から、車両制御部10で判定され、回転を制限する方向(障害物が存在する方向)で構成される。
【0072】
すなわち車両制御部10は、回転前の状態を基準とし、ステップ12で指定された中心指定スイッチ45に対応する位置を回転中心として、障害物に接触するまで信地回転させた場合の回転角度θ1を算出し、回転角度θ1が所定の基準値θ2(例えば、20度)以下である場合に、回転方向制限情報として回転できない方向を、ステージ部ECU300に供給する。
【0073】
ステージ部ECU300は、回転方向の作動制限があるか否かを判断し(ステップ15)、作動制限がある場合(ステップ15;Y)、制限された方向に操作部40が回転しないようにするため、モータ駆動部303を駆動して操作部40の反力制御を行う(ステップ16)。
すなわち、ステージ部ECU300は、操作部40が回転制限方向に操作された場合に、回転操作方向と逆方向のトルクを発生させることで、障害物方向への操作ができないことをユーザに告知する。
なお、反力トルクだけでなく、振動により該当方向への回転操作が制限がされていることを告知するようにしてもよい。
【0074】
ついでステージ部ECU300は、エンコーダ制御部304で操作部40の回転操作による回転方向と回転量を検出し、作動情報として車両制御部10に出力して(ステップ17)、メインルーチンにリターンする。
【0075】
一方、平行移動モードが選択された場合(ステップ10;平行移動モード)、電磁石311、41の対4組(4角部分)を励磁することで、操作部40をステージ30にロックする(ステップ21)。
そして、ステージ部ECU300は、作動方向制限情報を車両制御部10から入手する(ステップ22)。
操作装置が入手する作動方向制限情報は、障害物検出部14で検出された車両周辺に存在する障害物の有無とその距離から、車両制御部10で判定され、平行移動を制限する方向(障害物が存在する方向)が供給される。
【0076】
すなわち車両制御部10は、車両から検出した障害物までの距離L1が所定値L2(例えば、40cm)以下である場合に、作動方向制限情報として移動できない方向を操作装置に供給する。
【0077】
ステージ部ECU300は、平行移動の制限があるか否かを判断し(ステップ23)、移動制限がある場合(ステップ23;Y)、制限された方向に操作部40が移動しないようにするため、操作部40がロックされているステージ30に対して対して反力制御を行う(ステップ24)。
なお、反力制御とともに、振動により該当方向への傾斜操作が制限されていることを告知するようにしてもよい。
【0078】
ついでステージ部ECU300は、エンコーダ制御部304により、操作部40の移動方向と移動量を検出し(ステップ25)、作動情報として車両制御部10に出力(送信)して(ステップ26)、メインルーチンにリターンする。
【0079】
ステージ部ECU300から作動情報が出力されると、車両制御部10は、操舵機構制御部17により、信地回転であればステップ12で出力されている回転中心に従って、回転中心と一致している駆動輪を除く駆動輪について操舵し、平行移動であれば全車輪を移動方向と平行な方向に操舵する。
そして、車両制御部10は、駆動制御部18により作動情報に応じた方向、車速となるように駆動輪を駆動する。
【0080】
図9は、独立操舵走行モードにおける表示装置15の表示画像を表したものである。
この図9(a)に示されるように、独立操舵走行モードが選択されると、車両制御部10は、車両図151と、障害物検出部14で検出した車両周辺の障害物を表示装置15に表示する。
そして、さらに信地回転モードが選択されると、車両制御部10は、信地回転として選択可能な9カ所の回転中心152a〜152i(表示部42に表示される中心指定スイッチ45a〜45iに対応)を表示する。
【0081】
ついで、中心指定スイッチ45が指定され、通信制御部301を介して回転中心が出力されると、車両制御部10は、図9(a)に示されるように、確定した回転中心(図9(a)では、152h)を強調表示する。この際選択されていない回転中心については表示を消去してもよい。
そして車両制御部10は、回転前の状態を基準とし、障害物に接触するまで確定した回転中心で信地回転させた場合の回転角度θ1を算出し、算出した回転角度θ1の大きさに応じて、回転方向153を表示する。
【0082】
図9(a)に示した例では、指定された左前方の回転中心152hを中心として、右回転をした場合の回転角度θ1が所定角度θ2以下であるので、操作部40の右回転がモータ駆動部303の反力トルクにより制限されると共に、車両制御部10は、表示装置15に左回転方向の矢印で回転方向153を表示する。
【0083】
そして、両方向に回転可能である場合、車両制御部10は、図9(b)に示すように、回転方向153の両端に矢頭を表示することで、両方向に回転可能であることを明示する。
回転方向153の矢印については、回転可能な角度θ3(<θ1)に応じて長さを変えるようにしてもよい。すなわち、図9(b)に示されるように、障害物がある側に回転する方向の矢印(図では右回り方向の矢印)を、障害物がない場合に比べて短く表示する。
なお、角度θ3は、θ1−5度に設定されているが、車体と障害物との最短距離が所定距離L3(例えば、40cm)となるまでの角度としてもよい。
【0084】
以上説明したように本実施形態によれば、独立操舵モードにおいて、信地回転及び平行移動における車両の実際と同様に操作部を操作するように構成することで、独立操舵における車両の動きを容易かつ正確に認識することができる。
【0085】
なお、説明した実施形態では、車輪位置や車輪間を信地回転位置として指定するする場合について説明したが、車両の角やその中間を信地回転の中心として指定及び回転可能に構成してもよい。
また説明した実施形態では、回転中心と略直角方向に各車輪を操舵させることで信地回転を行う場合について説明したが、車輪を操舵させず、回転数の制御により旋回(信地回転)するようにしてもよい。また、車輪の操舵と回転数制御の双方により信地回転を行うようにしてもよい。
【図面の簡単な説明】
【0086】
【図1】本実施形態における操作装置の外観構成図である。
【図2】操作部を回転及び水平面上で平行移動させる操作装置の概略構成を表した平面図及び断面図である。
【図3】回転支持ユニット及びリニアセンサの構成を表した説明図である。
【図4】操作部に配置された表示部の表示状態を表した説明図である。
【図5】本実施形態の車両における制御系の構成図である。
【図6】操作装置における制御系の構成図である。
【図7】信地回転モードにおける、回転中心と表示部の表示画像及び操作部の操作を表した説明図である。
【図8】独立操舵走行における操作装置の動作を表したフローチャートである。
【図9】独立操舵走行モードにおける表示装置の表示画像を表した説明図である。
【符号の説明】
【0087】
10 車両制御部
11 現在位置検出装置
12 地図データ
13 車速センサ
14 障害物検出部
15 表示装置
16 入力装置
17 操舵機構制御部
18 駆動制御部
19 通信制御部
20 ケーシング
21 モード選択スイッチ
22〜29 リニアボリュウム
30 ステージ
31 回転支持ユニット本体
32〜39 リニアアクチュエータ
311 電磁石
312 エンコーダ
313 ギヤヘッド
314 モータ
40 操作部
41 電磁石
42 表示部
43 車両図
【特許請求の範囲】
【請求項1】
複数車輪を備え、各車輪が独立して制御可能な車両の操作装置であって、
平行移動する平行移動モードと、所定の地点を回転中心として回転する信地回転モードを選択するモード選択手段と、
前記選択されたモードに対応して、車両の移動を指示する操作部と、
前記操作部に配置され、前記信地回転モードにおける回転中心を指定する回転中心指定手段と、
前記選択されたモードを示すモード情報と、前記操作部による操作情報を出力する操作情報出力手段とを備え、
前記操作部は、前記平行移動モードにおいて水平方向に移動可能であり、前記信地回転モードにおいて指定された回転中心を中心として回転可能に構成されている、
ことを特徴とする車両の操作装置。
【請求項2】
前記回転中心指定手段は、車両の各車輪位置、全車輪の中心位置、及び隣接する2車輪の中心位置に対応する指定点を備え、いずれか1の指定点を回転中心として指定し、
前記操作部は、前記指定された指定点を中心に回転可能である、
ことを特徴とする請求項1に記載の車両の操作装置。
【請求項3】
装置本体と、
前記装置本体内に水平方向に移動可能に収容され上部に前記操作部が配置されるステージと、
前記各指定点に対応して前記操作部に配置され、前記指定された前記指定点に対応して励磁されると共に、励磁状態で前記操作部の回転に伴い回転する複数の操作部電磁石と、
前記各操作部電磁石に対応して前記ステージに配設され、前記指定された指定点に対応して励磁されることで、対応する操作部電磁石の回転に伴い回転するステージ電磁石と、
前記各ステージ電磁石の回転量を検出する回転量検出手段と、
前記ステージの移動方向と移動量の少なくとも一方を検出する水平方向移動量検出手段と、を備え、
前記操作情報出力手段は、信地回転モードの場合、指定された指定点と前記検出した回転量を操作情報として、平行移動モードの場合、前記検出したステージの移動方向と移動量を操作情報として、出力する、
ことを特徴とする請求項2に記載の車両の操作装置。
【請求項4】
前記平行移動モードにおいて、少なくとも2つの前記操作部電磁石及びこれと対応するステージ電磁石が励磁されることで、前記操作部とステージが固定されることを特徴とする請求項3に記載の車両の操作装置。
【請求項5】
複数の車輪を備え、各車輪が独立して制御可能な車両の操作装置であって、
所定の地点を回転中心として回転する信地回転モードを選択するモード選択手段と、
操作部に配置され、前記信地回転モードにおける回転中心を指定する回転中心指定手段と、
上部に前記操作部が配置されるステージと、
前記各指定点に対応して前記操作部に配置され、前記指定された前記指定点に対応して励磁されると共に、励磁状態で前記操作部の回転に伴い回転する複数の操作部電磁石と、
前記各操作部電磁石に対応して前記ステージに配設され、前記指定された指定点に対応して励磁されることで、対応する操作部電磁石の回転に伴い回転するステージ電磁石と、
前記各ステージ電磁石の回転量を検出する回転量検出手段と、
を備えたことを特徴とする車両の操作装置。
【請求項6】
前記モード選択手段は平行移動する平行移動モードをさらに有し、
前記ステージを水平方向に移動可能に収容した装置本体と、
前記ステージの移動方向と移動量の少なくとも一方を検出する水平方向移動量検出手段と、を備え、
前記操作情報出力手段は、信地回転モードの場合、指定された指定点と前記検出した回転量を操作情報として平行移動モードにおいて、前記検出された指定点と前記検出した回転量を操作情報として、出力する
ことを特徴とする請求項5に記載の車両の操作装置。
【請求項1】
複数車輪を備え、各車輪が独立して制御可能な車両の操作装置であって、
平行移動する平行移動モードと、所定の地点を回転中心として回転する信地回転モードを選択するモード選択手段と、
前記選択されたモードに対応して、車両の移動を指示する操作部と、
前記操作部に配置され、前記信地回転モードにおける回転中心を指定する回転中心指定手段と、
前記選択されたモードを示すモード情報と、前記操作部による操作情報を出力する操作情報出力手段とを備え、
前記操作部は、前記平行移動モードにおいて水平方向に移動可能であり、前記信地回転モードにおいて指定された回転中心を中心として回転可能に構成されている、
ことを特徴とする車両の操作装置。
【請求項2】
前記回転中心指定手段は、車両の各車輪位置、全車輪の中心位置、及び隣接する2車輪の中心位置に対応する指定点を備え、いずれか1の指定点を回転中心として指定し、
前記操作部は、前記指定された指定点を中心に回転可能である、
ことを特徴とする請求項1に記載の車両の操作装置。
【請求項3】
装置本体と、
前記装置本体内に水平方向に移動可能に収容され上部に前記操作部が配置されるステージと、
前記各指定点に対応して前記操作部に配置され、前記指定された前記指定点に対応して励磁されると共に、励磁状態で前記操作部の回転に伴い回転する複数の操作部電磁石と、
前記各操作部電磁石に対応して前記ステージに配設され、前記指定された指定点に対応して励磁されることで、対応する操作部電磁石の回転に伴い回転するステージ電磁石と、
前記各ステージ電磁石の回転量を検出する回転量検出手段と、
前記ステージの移動方向と移動量の少なくとも一方を検出する水平方向移動量検出手段と、を備え、
前記操作情報出力手段は、信地回転モードの場合、指定された指定点と前記検出した回転量を操作情報として、平行移動モードの場合、前記検出したステージの移動方向と移動量を操作情報として、出力する、
ことを特徴とする請求項2に記載の車両の操作装置。
【請求項4】
前記平行移動モードにおいて、少なくとも2つの前記操作部電磁石及びこれと対応するステージ電磁石が励磁されることで、前記操作部とステージが固定されることを特徴とする請求項3に記載の車両の操作装置。
【請求項5】
複数の車輪を備え、各車輪が独立して制御可能な車両の操作装置であって、
所定の地点を回転中心として回転する信地回転モードを選択するモード選択手段と、
操作部に配置され、前記信地回転モードにおける回転中心を指定する回転中心指定手段と、
上部に前記操作部が配置されるステージと、
前記各指定点に対応して前記操作部に配置され、前記指定された前記指定点に対応して励磁されると共に、励磁状態で前記操作部の回転に伴い回転する複数の操作部電磁石と、
前記各操作部電磁石に対応して前記ステージに配設され、前記指定された指定点に対応して励磁されることで、対応する操作部電磁石の回転に伴い回転するステージ電磁石と、
前記各ステージ電磁石の回転量を検出する回転量検出手段と、
を備えたことを特徴とする車両の操作装置。
【請求項6】
前記モード選択手段は平行移動する平行移動モードをさらに有し、
前記ステージを水平方向に移動可能に収容した装置本体と、
前記ステージの移動方向と移動量の少なくとも一方を検出する水平方向移動量検出手段と、を備え、
前記操作情報出力手段は、信地回転モードの場合、指定された指定点と前記検出した回転量を操作情報として平行移動モードにおいて、前記検出された指定点と前記検出した回転量を操作情報として、出力する
ことを特徴とする請求項5に記載の車両の操作装置。
【図1】


【図2】
【図3】
【図4】

【図5】

【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2007−237862(P2007−237862A)
【公開日】平成19年9月20日(2007.9.20)
【国際特許分類】
【出願番号】特願2006−61655(P2006−61655)
【出願日】平成18年3月7日(2006.3.7)
【出願人】(591261509)株式会社エクォス・リサーチ (1,360)
【Fターム(参考)】
【公開日】平成19年9月20日(2007.9.20)
【国際特許分類】
【出願日】平成18年3月7日(2006.3.7)
【出願人】(591261509)株式会社エクォス・リサーチ (1,360)
【Fターム(参考)】
[ Back to top ]