
車両の横揺れ防止装置
旋回中の車体が外側に傾く荷重変化(ロール)に作用することができる少なくとも1つのアクチュエータ(21)と、車両の横方向加速度、車両に加えられるアンチロールトルクのロール角および運転状況データから、ロール状態を予測するモジュールと、ロールに作用する外乱の漸近的除去設定値を生成するモジュールを備える、車両(1)の横揺れを制御する装置(11)。

【発明の詳細な説明】
【発明の開示】
【0001】
本発明は、地上車両、とりわけ車輪付き自動車両の制御システムの分野に属する。従来、自動車両は、車体、乗員室、およびサスペンション機構によって、車体に連結された車輪を備えており、乗員室内の運転者の操作に委ねられるハンドルによって、操作される操舵輪である前車輪と、操舵輪であるまたは操舵輪でない後車輪を有する。
【0002】
文献US2004/0117085には、アクティブ・サスペンションシステムおよびアクティブ・アンチロールバーシステムを制御することができるヨーイング安定制御ユニット、ロール安定制御ユニットおよび、優先判定、統合ユニットに対して情報を提供する横方向加速度センサ、ロールセンサ、操舵角センサおよび少なくとも1つの速度センサを備えた、車両のヨーイング制御システムが記載されている。
【0003】
文献US2004/0117071には、車両のロール制限方法であって、比例、導関数および二次導関数型の補正と、ブレーキ制御システムに送られるか、または操舵制御システムに送られる制御信号を含む方法が記載されている。
【0004】
しかし、これらのシステムは、多数のセンサを必要とする上に、運転者からある種の働きかけを受けたときに、またはある種の路面状態に対して、十分に安定的でない挙動を車両にもたらす。単独または二重の障害の回避など、ある種の状況は車両の制御不能を来たすことがあり得る。この場合の制御不能は、しばしば車両の反応が極端である、十分に緩和されていない、予測し難いなどの理由で不適応であることが原因である。
【0005】
本発明が目的とするのは、安全性、安心感、快適性および大きな運転の喜びを保障する横揺れ防止制御システムである。
【0006】
横揺れ(ロール)に作用することができる、少なくとも1つのアクチュエータを備える車両のロール制御方法は、車両の横方向加速度、車両に加えられるアンチロールトルクのロール角、および運転状況データからロール状態を予測するステップと、ロールに作用する外乱の漸近的除去設定値を生成するステップとを含む。これにより、外乱を効率的に除去することができる。
【0007】
好ましくは、アクチュエータの設定値および横方向加速度に応じてロール状態を予測する。好ましくは、アクチュエータのダイナミックレンジに応じてロール状態を予測する。また、好ましくは、外乱に応じてロール状態の変化を計算する。
【0008】
1つの実施形態では、ロール角をセンサで測定し、測定したロール角からロール状態を予測する。また1つの実施形態では、車両の速度、前輪の操舵角および/または制動圧力に応じて設定値を生成する。
【0009】
車両のロール制御装置は、ロールに作用することができる少なくとも1つのアクチュエータと、車両の横方向加速度、車両に加えられるアンチロールトルクのロール角および運転状況データからロール状態を予測するモジュールと、ロールに作用する外乱の漸近的除去設定値を生成するモジュールを備える。
【0010】
1つの実施形態では、各モジュールは閉ループ構成で配置される。1つの実施形態では、アクチュエータは制御可能なアンチロールバーに連結される。また1つの実施形態では、アクチュエータはアクティブサスペンションに連結される。
【0011】
車両は、車体と、車体に連結された少なくとも3つの車輪と、車両のロール制御装置とを備える。この装置は、ロールに作用することができる少なくとも1つのアクチュエータと、車両の横方向加速度、車両に加えられるアンチロールトルクのロール角および運転状況データから、ロール状態を予測するモジュールと、ロールに作用する外乱の漸近的除去設定値を生成するモジュールを備える。
【0012】
本発明は、前2輪と後2輪による4輪の車両、3輪の車両、または6輪もしくはそれ以上の車輪数の車両であって、そのうちの少なくとも2輪が操舵輪である車両に適用される。本発明は、運転者による働きかけや路面の状態にかかわらず、車両が所望のロール挙動をとることができるようにするものであり、それによって、とりわけ自動車両の使用者の快適性を高めることができる。また、本発明は安心感、快適性および運転の喜びを高めることができる。
【0013】
アクティブ・アンチロールシステムは、車両の速度を考慮に入れながら、運転者によるハンドル操作に対する車両の横方向の応答を最小化することができる。最適化は、安全性、快適性および運転の楽しさのそれぞれの基準に従って行われる。
【0014】
本発明は、何ら限定的でない例として取り上げた、添付の図面によって図示する幾つかの実施形態に関する詳細な説明を検討することで、よりよく理解されるであろう。
【0015】
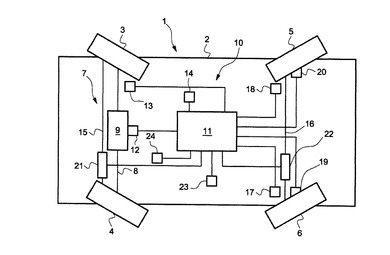
図1を見るとわかるように、車両1は車体2と、2つの操舵前輪3および4と、2つの後輪5および6を備え、それぞれの車輪は図示しないサスペンション機構によって車体2に連結されている。
【0016】
車両1は、前輪3および4の間に配置されたラック8と、車両の運転者の操作に委ねられる操舵ハンドル(図示せず)から、機械的または電気的に受け取る指令に応じて、ラック8を介して前輪3および4を方向づけることができる、ラックアクチュエータ9とを備える操舵システム7をもって実現される。
【0017】
アンチロールシステム10は、制御ユニット11と、車両の速度Vを決定することができる例えば前輪の車輪回転速度センサ13と、車両のロール角θすなわち長手方向の軸に沿った重心の周りの車両の傾きのセンサ14と、さらにオプションで、例えばアクチュエータ9上に配置された前輪3および4の操舵位置のセンサ12とを備える。
【0018】
さらにシステム10は、後輪5および6の操舵角のセンサ17および18と、後輪5および6を方向づけることができるアクチュエータ19および20とを備えることができる。しかし、操舵角の検出と後輪5および6の方向づけには、単一のセンサ17と単一のアクチュエータ19だけで足りる。後輪5および6は操舵輪でないからである。位置センサおよび速度センサは、光学式または、例えばホール効果による磁場式であって、可動部分に接続されたエンコーダと協働するものであればよいが、このセンサは回転しない。
【0019】
車両1は、それぞれ前輪3、4と後輪5、6を連結する2本のアンチロールバー15および16を備える。アンチロールシステム10は、ここに図示するアクチュエータを少なくとも1つ備える。2つのアクチュエータ21および22は、前アンチロールバー15および後アンチロールバー16とそれぞれ連係し、制御ユニット11からの制御指令を受けたときに、該バー15および16に作用するアクティブ・アンチロールバーを形成する。アクチュエータ21および22は、例えば制御ユニット11から受ける設定値に応じて、アンチロールバー15および16の剛性を変化させることができる。システム10は、横方向加速度γTセンサ23およびブレーキ回路の圧力Pのセンサ24を備えることができる。
【0020】
制御ユニット11は、RAM、ROM、中央処理装置、およびセンサから情報を受け、とりわけアンチロール・アクチュエータ21および22に指示を出すことができる入出力インターフェースを備えた、マイクロプロセッサの形で実現することができる。
【0021】
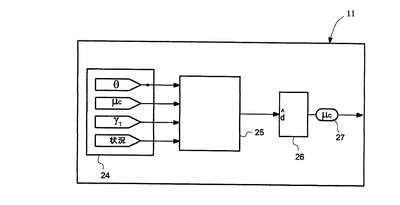
より詳細には、制御ユニット11はセンサ13、14および23からの信号、とりわけ車両の速度V、ロール角θおよび横方向加速度γTを受け取る入力ブロック24を備える(図2参照)。車両の速度Vは、車輪アンチロックシステムのセンサによって測定される前輪または後輪の速度の平均をとることによって得ることができる。この場合、車輪毎に1つのセンサ13が用意され、車輪アンチロックシステムは車両の速度情報を供給するために、制御ユニット11に入力される出力を備える。あるいは、それぞれのセンサ13の値は、制御ユニット11に入力され、これを受けて制御ユニット11は車輪の速度の平均値を得る。
【0022】
制御ユニット11は、とりわけ車両に作用する外乱など、測定されないが制御に必要な情報を予測することができる、状態オブザーバ25を備える。入力ブロック24は、車両の速度V、ロール角θ、横方向加速度γT、ならびに、とりわけ操舵角α1および/または圧力Pなど、運転状況に関するデータ「状況」を状態オブザーバ25に供給する。状態オブザーバ25は、例えば横方向加速度γTと車体のロール角θの間、およびアンチロール・アクチュエータによって加えられるトルクμfと車体のロール角θの間における伝達を表現した簡易方程式に基づくモデルから構築することができる。この方程式は、例えば次のように記すことができる。
【0023】
またアクチュエータによって、実際に加えられるトルクμfを制御トルクμcと区別して、アクチュエータのダイナミックレンジを導入することもできる。これは次のように表すことができる。
このモデルに付随する状態方程式は、次のようになる。
式中の記号はそれぞれ以下のとおりである。
【0024】
ここで、yは出力であり、Mは車両の全重量であり、Ixxは車体がそのロール軸すなわち地表より上に位置し、前方にわずかに傾斜することができる長手方向の軸周りの慣性であり、Lは車両のホイールベースであり、h0は車体のロール軸に対する重心の高さであり、E1は前輪トレッドであり、E2は後輪トレッドであり、α1は前輪の操舵角であり、θは車体のロール角であり、θcはモデルによって計算した車体のロール角であり、
は車体のロール速度であり、
はモデルによって計算した車体のロール速度であり、μcはロールトルクの設定値、μfはアクチュエータのダイナミックレンジによるフィルタをかけた、すなわち実際に加えられるロールトルクであり、τaはアンチロール・アクチュエータの応答時間である。
【0025】
次いで、同じモデルに基づきながら、そのモデルにさらに外乱を付加してこのオブザーバを構築する。例えば、等式
によって特徴づけられる外乱をステップ外乱としてモデル化することができる。すると、オブザーバの発展方程式は次のようになる。
これを、
および
と書く。ここで、^は値が予測値であることを示す。
【0026】
オブザーバは、速度に依存することがわかる。Kobsがオブザーバの設定パラメータであることにも留意する必要がある。Kobsは様々な車速について計算することができ、これを挿入することでKobs(V)を得、車両の速度に応じた異なる挙動を得る。
【0027】
4つの予測値
は、制御ユニット11の他の要素によって使用される、車両状態に関する予測値を供給する。制御ユニット11は外乱の漸近的除去ブロック26をさらに備える。このブロック26は、外乱値
を、一般に車両1のロール角θとなる当該出力に比して無視できるものとすることができる。閉ループ化は、状態オブザーバ25によって予測される外乱値
に対して行われる。
【0028】
外乱の漸近的除去の計算は、Larminatの方法(Automatique, Commande des systems lineaires - Philippede Larminat - Hermes)に基づく。外乱の漸近的除去を実現するためには、以下の2つの関係が満たされなければならない。
すなわち、
第1の関係から、Ta,1=1を得る。
第2の関係から、
を得る。
さらに、横方向加速度γTはフィードバックされないため、Ga,2=0である。この入力は制御できなく、そのまま維持されるためである。
その結果、以下を得る。
【0029】
また、状態フィードバックのゲインは、G=(G1Ga+G1Ta)で与えられる。システムダイナミックレンジは変えずに、単に外乱dの除去を行うため、G1=(000)となる。そのため、結局、
となる。したがって、外乱除去のための制御は、
で表される。
【0030】
制御ユニット11は、制御ユニット全体の出力をなすものであり、トルク設定値μcを供給して、それをアンチロール・アクチュエータ21および22に伝達する出力27をもって完結する。
【0031】
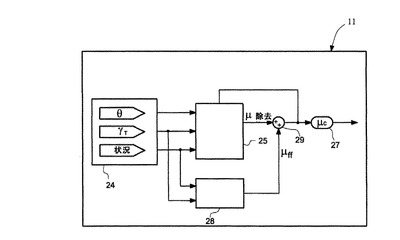
図3に示す実施形態では、アンチロールシステム10は、前述のような外乱除去手段と同時に、フランス国特許出願第0507113号に記載されているような、横方向加速度または前輪の操舵角に応じて、車両の動的および静的ロール応答を設定する開ループ制御を行う。そのため、制御ユニット11は、トルク設定値μcが入力ブロック24に再びループバックされる点を除いて、前記実施形態の場合と同じデータを入力側に受ける状態オブザーバ25と、入力側に横方向加速度γTおよび運転状態データ「状況」を受け、出力側に制御トルクμffを出力する外乱除去モジュール28とを備える。制御ユニット11は、制御トルクμffと除去設定値「μ除去」を入力する加算器29を備え、その2つの値を合計して出力側にトルク設定値μcを出力する。
【0032】
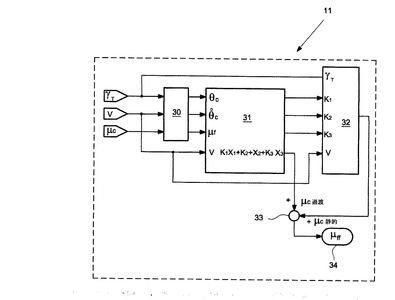
外乱除去モジュールは、測定されないが制御に必要な情報を予測することができる車両モデル30を含むことができる(図4参照)。モデル30は、車体2の固有挙動、すなわち車両の横方向加速度γTに応じた車体2のロールモード応答を予測することができる。このモデルは、例えば、横方向加速度γTと車体のロール角θの間および、アクチュエータによって加えられるトルクμfと車体のロール角θの間における伝達要素の簡易方程式に基づいたものとできる。すなわち、
アクチュエータのダイナミックレンジをモデル化することによって、アクチュエータによって実際に加えられるトルクの測定を回避することができる。すなわち、
ここで、μfは加えられるトルク、μcはトルク設定値、τaはアクチュエータのダイナミックレンジ、sはラプラス演算子である。このモデルに付随する状態方程式は、次のとおりである。
モデル30は、計算によるロール角θc、計算によるロール速度
および、アクチュエータのダイナミックレンジによるフィルタをかけた、すなわち実際に加えられるロールトルクμfを供給する。
【0033】
制御ユニット11は、そのほか、モデル30の上述の出力および車両1の速度Vを入力する過渡値計算ブロック31を備える。ブロック31は、過渡応答に作用することを可能にする制御を極配置によって計算する。上述したシステムの3つの極を次のように記す。
ここで、速度Vにおける極の実数部をa1(V)、虚数部をb1(V)と記している。その上で、ループ化されたシステムの極を以下に設定する補償ファクタ K=[K1(V) K2(V) K3(V)]が求められる。
ここで、Tdyn11、Tdyn12、Tdyn21、Tdyn22、Tdyn31、Tdyn32は、車両の過渡応答の設定パラメータ(車両の速度Vに依存する変数)である。
【0034】
補償ファクタK(V0)は、選択された個々の速度V0について、Int. J. Control, 41(1985), 1129-1155ページに掲載された、J. Kautsky et N. K. Nicholsによる論文「Robust Pole Assignment in Linear State Feedback」に記載されている、極設定法によって計算することができる。
【0035】
これにより、コマンドの最初の部分を次のように得る。
設定パラメータが1のときは車両の動的応答は変更されず、1を超えるパラメータは車両のロール応答を増大させ、1未満のパラメータは車両のロール応答を低下させることがわかる。一例として、次のように設定することができる。
Tdyn11=0.8
Tdyn12=0
Tdyn21=0.8
Tdyn22=0
Tdyn31=0.8
Tdyn32=0
【0036】
この設定により、ロール振動を抑えながら車両の動的応答を減速させることができる。この設定は、カーブ進入時に乗員が感じる、ロール開始の唐突さを和らげることで乗員の快適性を高めることができる。こうして、ブロック31は係数K1、K2およびK3ならびにコマンドの最初の部分である「μc過渡」を出力側に供給する。
【0037】
制御ユニット11は、そのほか、ブロック31から係数K1、K2およびK3、車両の速度Vならびに横方向加速度γTを入力値とする静的コマンド「μc静的」を計算するブロック32を備える。このコマンド「μc静的」は、所定の大きさのハンドル操作を受けて生じる、車体のロール角の静的な値を設定することができる。この結果は、アクティブアンチロール装置のない同一の車両で得ることができる静的ゲイン(右辺)と比較して、次のように表すことができる。すなわち、
ここでTgsは、必要であれば速度Vに応じて変化させることができる設定パラメータである。
【0038】
コマンドの第2の部分は、パラメータTgsに応じて次のように計算される。すなわち、
パラメータTgsが1のとき、車両の静的応答は変更されず、パラメータTgsが1を超えるときは車両の静的応答は強められ、パラメータTgsが1未満のときは車両の静的応答は弱められることがわかる。一例としてTgsを0.8とすることによって、安定した転回時に車体に生じるロールを減らし、それによって乗員の快適性を顕著に改善することができる。
【0039】
制御ユニット11は、加算器33および出力34をもって完結する。加算器33は1つの入力データとしてブロック31の制御出力「μc過渡」を、もう1つの加算入力データとしてブロック32のコマンド出力「μc静的」を入力する。一方、加算器33の出力は、外乱除去モジュールの出力データとなる。
【0040】
図5に示す実施形態では操舵角α1は、計算によるロール角θc、車両のロール状態X2,cおよびアクチュエータのダイナミックレンジによりフィルタをかけ、実際に加えられるロールトルクμfを、車両のモデル31により計算するために利用される。
【0041】
図5に示す制御ユニット11は図4に示すものに近いが、モデル30が、例えば次の方程式に基づいたものであることが異なる。ここで、α1は前輪の操舵角である。
アクチュエータによって実際に加えられるトルクμfは、前記と同様、測定したものではなく、同様にアクチュエータのダイナミックレンジをモデル化して得たものである。すなわち、
【0042】
このモデルに付随する状態方程式は次のとおりである。
ただし、
であり、yは当該出力であり、X2,cは
によって定義される、車両の第2のロール状態である。
【0043】
過渡値を計算するブロック31は、図4に示したものと同様のものである。静的制御の計算ブロック32は、所定の大きさのハンドル操作を受けて生じる、車体のロール角の安定時の値を設定することができる。結果は、アクティブ・アンチロール装置のない同じ車両で得ることができる静的ゲイン(右辺)と比較して次のように表される。すなわち、
ただしTgsは、必要であれば、速度Vに応じて変化することができる設定パラメータである。
【0044】
コマンドの第2の部分はパラメータTgsに応じて次のように計算される。
式中の記号は前述のとおりである。すなわち、
制御ユニット11は前記実施形態と同様、ブロック31の出力「μ2過渡」と、ブロック32からの出力「μ2静的」とを入力する加算器33をもって完結する。
【0045】
本発明は、アクティブ・アンチロールシステムの制御を行い、開ループ戦略によって、横方向加速度または前輪の操舵角に応じて、車両の動的および静的なロール応答を設定することができる制御方法を提供する。この制御は、例えば車両の速度Vに依存することができる。車両は、運転者による要求や路面の状態にかかわらず、最も安定した挙動をとるように設計され、極めて高い安全性、高い安心感、快適性および運転の楽しみを最適化された状態で提供する。
【0046】
本発明は望むときに、とりわけ車両がカーブに入って直ちに、アンチロールバー15および16の作動の変化の恩恵を受けることができるようにし、それによって、車両の接地性および運転者が感じる運転の快適性を向上させる。
【図面の簡単な説明】
【0047】
【図1】本発明の1つの態様による制御システムを備えた車両の概略図である。
【図2】本発明の1つの態様によるシステムの論理図である。
【図3】本発明のもう1つの態様によるシステムの論理図である。
【図4】本発明のもう1つの態様による制御ユニット11のブロック図である。
【図5】本発明のもう1つの態様による制御ユニット11のブロック図である。
【発明の開示】
【0001】
本発明は、地上車両、とりわけ車輪付き自動車両の制御システムの分野に属する。従来、自動車両は、車体、乗員室、およびサスペンション機構によって、車体に連結された車輪を備えており、乗員室内の運転者の操作に委ねられるハンドルによって、操作される操舵輪である前車輪と、操舵輪であるまたは操舵輪でない後車輪を有する。
【0002】
文献US2004/0117085には、アクティブ・サスペンションシステムおよびアクティブ・アンチロールバーシステムを制御することができるヨーイング安定制御ユニット、ロール安定制御ユニットおよび、優先判定、統合ユニットに対して情報を提供する横方向加速度センサ、ロールセンサ、操舵角センサおよび少なくとも1つの速度センサを備えた、車両のヨーイング制御システムが記載されている。
【0003】
文献US2004/0117071には、車両のロール制限方法であって、比例、導関数および二次導関数型の補正と、ブレーキ制御システムに送られるか、または操舵制御システムに送られる制御信号を含む方法が記載されている。
【0004】
しかし、これらのシステムは、多数のセンサを必要とする上に、運転者からある種の働きかけを受けたときに、またはある種の路面状態に対して、十分に安定的でない挙動を車両にもたらす。単独または二重の障害の回避など、ある種の状況は車両の制御不能を来たすことがあり得る。この場合の制御不能は、しばしば車両の反応が極端である、十分に緩和されていない、予測し難いなどの理由で不適応であることが原因である。
【0005】
本発明が目的とするのは、安全性、安心感、快適性および大きな運転の喜びを保障する横揺れ防止制御システムである。
【0006】
横揺れ(ロール)に作用することができる、少なくとも1つのアクチュエータを備える車両のロール制御方法は、車両の横方向加速度、車両に加えられるアンチロールトルクのロール角、および運転状況データからロール状態を予測するステップと、ロールに作用する外乱の漸近的除去設定値を生成するステップとを含む。これにより、外乱を効率的に除去することができる。
【0007】
好ましくは、アクチュエータの設定値および横方向加速度に応じてロール状態を予測する。好ましくは、アクチュエータのダイナミックレンジに応じてロール状態を予測する。また、好ましくは、外乱に応じてロール状態の変化を計算する。
【0008】
1つの実施形態では、ロール角をセンサで測定し、測定したロール角からロール状態を予測する。また1つの実施形態では、車両の速度、前輪の操舵角および/または制動圧力に応じて設定値を生成する。
【0009】
車両のロール制御装置は、ロールに作用することができる少なくとも1つのアクチュエータと、車両の横方向加速度、車両に加えられるアンチロールトルクのロール角および運転状況データからロール状態を予測するモジュールと、ロールに作用する外乱の漸近的除去設定値を生成するモジュールを備える。
【0010】
1つの実施形態では、各モジュールは閉ループ構成で配置される。1つの実施形態では、アクチュエータは制御可能なアンチロールバーに連結される。また1つの実施形態では、アクチュエータはアクティブサスペンションに連結される。
【0011】
車両は、車体と、車体に連結された少なくとも3つの車輪と、車両のロール制御装置とを備える。この装置は、ロールに作用することができる少なくとも1つのアクチュエータと、車両の横方向加速度、車両に加えられるアンチロールトルクのロール角および運転状況データから、ロール状態を予測するモジュールと、ロールに作用する外乱の漸近的除去設定値を生成するモジュールを備える。
【0012】
本発明は、前2輪と後2輪による4輪の車両、3輪の車両、または6輪もしくはそれ以上の車輪数の車両であって、そのうちの少なくとも2輪が操舵輪である車両に適用される。本発明は、運転者による働きかけや路面の状態にかかわらず、車両が所望のロール挙動をとることができるようにするものであり、それによって、とりわけ自動車両の使用者の快適性を高めることができる。また、本発明は安心感、快適性および運転の喜びを高めることができる。
【0013】
アクティブ・アンチロールシステムは、車両の速度を考慮に入れながら、運転者によるハンドル操作に対する車両の横方向の応答を最小化することができる。最適化は、安全性、快適性および運転の楽しさのそれぞれの基準に従って行われる。
【0014】
本発明は、何ら限定的でない例として取り上げた、添付の図面によって図示する幾つかの実施形態に関する詳細な説明を検討することで、よりよく理解されるであろう。
【0015】
図1を見るとわかるように、車両1は車体2と、2つの操舵前輪3および4と、2つの後輪5および6を備え、それぞれの車輪は図示しないサスペンション機構によって車体2に連結されている。
【0016】
車両1は、前輪3および4の間に配置されたラック8と、車両の運転者の操作に委ねられる操舵ハンドル(図示せず)から、機械的または電気的に受け取る指令に応じて、ラック8を介して前輪3および4を方向づけることができる、ラックアクチュエータ9とを備える操舵システム7をもって実現される。
【0017】
アンチロールシステム10は、制御ユニット11と、車両の速度Vを決定することができる例えば前輪の車輪回転速度センサ13と、車両のロール角θすなわち長手方向の軸に沿った重心の周りの車両の傾きのセンサ14と、さらにオプションで、例えばアクチュエータ9上に配置された前輪3および4の操舵位置のセンサ12とを備える。
【0018】
さらにシステム10は、後輪5および6の操舵角のセンサ17および18と、後輪5および6を方向づけることができるアクチュエータ19および20とを備えることができる。しかし、操舵角の検出と後輪5および6の方向づけには、単一のセンサ17と単一のアクチュエータ19だけで足りる。後輪5および6は操舵輪でないからである。位置センサおよび速度センサは、光学式または、例えばホール効果による磁場式であって、可動部分に接続されたエンコーダと協働するものであればよいが、このセンサは回転しない。
【0019】
車両1は、それぞれ前輪3、4と後輪5、6を連結する2本のアンチロールバー15および16を備える。アンチロールシステム10は、ここに図示するアクチュエータを少なくとも1つ備える。2つのアクチュエータ21および22は、前アンチロールバー15および後アンチロールバー16とそれぞれ連係し、制御ユニット11からの制御指令を受けたときに、該バー15および16に作用するアクティブ・アンチロールバーを形成する。アクチュエータ21および22は、例えば制御ユニット11から受ける設定値に応じて、アンチロールバー15および16の剛性を変化させることができる。システム10は、横方向加速度γTセンサ23およびブレーキ回路の圧力Pのセンサ24を備えることができる。
【0020】
制御ユニット11は、RAM、ROM、中央処理装置、およびセンサから情報を受け、とりわけアンチロール・アクチュエータ21および22に指示を出すことができる入出力インターフェースを備えた、マイクロプロセッサの形で実現することができる。
【0021】
より詳細には、制御ユニット11はセンサ13、14および23からの信号、とりわけ車両の速度V、ロール角θおよび横方向加速度γTを受け取る入力ブロック24を備える(図2参照)。車両の速度Vは、車輪アンチロックシステムのセンサによって測定される前輪または後輪の速度の平均をとることによって得ることができる。この場合、車輪毎に1つのセンサ13が用意され、車輪アンチロックシステムは車両の速度情報を供給するために、制御ユニット11に入力される出力を備える。あるいは、それぞれのセンサ13の値は、制御ユニット11に入力され、これを受けて制御ユニット11は車輪の速度の平均値を得る。
【0022】
制御ユニット11は、とりわけ車両に作用する外乱など、測定されないが制御に必要な情報を予測することができる、状態オブザーバ25を備える。入力ブロック24は、車両の速度V、ロール角θ、横方向加速度γT、ならびに、とりわけ操舵角α1および/または圧力Pなど、運転状況に関するデータ「状況」を状態オブザーバ25に供給する。状態オブザーバ25は、例えば横方向加速度γTと車体のロール角θの間、およびアンチロール・アクチュエータによって加えられるトルクμfと車体のロール角θの間における伝達を表現した簡易方程式に基づくモデルから構築することができる。この方程式は、例えば次のように記すことができる。
【0023】
またアクチュエータによって、実際に加えられるトルクμfを制御トルクμcと区別して、アクチュエータのダイナミックレンジを導入することもできる。これは次のように表すことができる。
このモデルに付随する状態方程式は、次のようになる。
式中の記号はそれぞれ以下のとおりである。
【0024】
ここで、yは出力であり、Mは車両の全重量であり、Ixxは車体がそのロール軸すなわち地表より上に位置し、前方にわずかに傾斜することができる長手方向の軸周りの慣性であり、Lは車両のホイールベースであり、h0は車体のロール軸に対する重心の高さであり、E1は前輪トレッドであり、E2は後輪トレッドであり、α1は前輪の操舵角であり、θは車体のロール角であり、θcはモデルによって計算した車体のロール角であり、
は車体のロール速度であり、
はモデルによって計算した車体のロール速度であり、μcはロールトルクの設定値、μfはアクチュエータのダイナミックレンジによるフィルタをかけた、すなわち実際に加えられるロールトルクであり、τaはアンチロール・アクチュエータの応答時間である。
【0025】
次いで、同じモデルに基づきながら、そのモデルにさらに外乱を付加してこのオブザーバを構築する。例えば、等式
によって特徴づけられる外乱をステップ外乱としてモデル化することができる。すると、オブザーバの発展方程式は次のようになる。
これを、
および
と書く。ここで、^は値が予測値であることを示す。
【0026】
オブザーバは、速度に依存することがわかる。Kobsがオブザーバの設定パラメータであることにも留意する必要がある。Kobsは様々な車速について計算することができ、これを挿入することでKobs(V)を得、車両の速度に応じた異なる挙動を得る。
【0027】
4つの予測値
は、制御ユニット11の他の要素によって使用される、車両状態に関する予測値を供給する。制御ユニット11は外乱の漸近的除去ブロック26をさらに備える。このブロック26は、外乱値
を、一般に車両1のロール角θとなる当該出力に比して無視できるものとすることができる。閉ループ化は、状態オブザーバ25によって予測される外乱値
に対して行われる。
【0028】
外乱の漸近的除去の計算は、Larminatの方法(Automatique, Commande des systems lineaires - Philippede Larminat - Hermes)に基づく。外乱の漸近的除去を実現するためには、以下の2つの関係が満たされなければならない。
すなわち、
第1の関係から、Ta,1=1を得る。
第2の関係から、
を得る。
さらに、横方向加速度γTはフィードバックされないため、Ga,2=0である。この入力は制御できなく、そのまま維持されるためである。
その結果、以下を得る。
【0029】
また、状態フィードバックのゲインは、G=(G1Ga+G1Ta)で与えられる。システムダイナミックレンジは変えずに、単に外乱dの除去を行うため、G1=(000)となる。そのため、結局、
となる。したがって、外乱除去のための制御は、
で表される。
【0030】
制御ユニット11は、制御ユニット全体の出力をなすものであり、トルク設定値μcを供給して、それをアンチロール・アクチュエータ21および22に伝達する出力27をもって完結する。
【0031】
図3に示す実施形態では、アンチロールシステム10は、前述のような外乱除去手段と同時に、フランス国特許出願第0507113号に記載されているような、横方向加速度または前輪の操舵角に応じて、車両の動的および静的ロール応答を設定する開ループ制御を行う。そのため、制御ユニット11は、トルク設定値μcが入力ブロック24に再びループバックされる点を除いて、前記実施形態の場合と同じデータを入力側に受ける状態オブザーバ25と、入力側に横方向加速度γTおよび運転状態データ「状況」を受け、出力側に制御トルクμffを出力する外乱除去モジュール28とを備える。制御ユニット11は、制御トルクμffと除去設定値「μ除去」を入力する加算器29を備え、その2つの値を合計して出力側にトルク設定値μcを出力する。
【0032】
外乱除去モジュールは、測定されないが制御に必要な情報を予測することができる車両モデル30を含むことができる(図4参照)。モデル30は、車体2の固有挙動、すなわち車両の横方向加速度γTに応じた車体2のロールモード応答を予測することができる。このモデルは、例えば、横方向加速度γTと車体のロール角θの間および、アクチュエータによって加えられるトルクμfと車体のロール角θの間における伝達要素の簡易方程式に基づいたものとできる。すなわち、
アクチュエータのダイナミックレンジをモデル化することによって、アクチュエータによって実際に加えられるトルクの測定を回避することができる。すなわち、
ここで、μfは加えられるトルク、μcはトルク設定値、τaはアクチュエータのダイナミックレンジ、sはラプラス演算子である。このモデルに付随する状態方程式は、次のとおりである。
モデル30は、計算によるロール角θc、計算によるロール速度
および、アクチュエータのダイナミックレンジによるフィルタをかけた、すなわち実際に加えられるロールトルクμfを供給する。
【0033】
制御ユニット11は、そのほか、モデル30の上述の出力および車両1の速度Vを入力する過渡値計算ブロック31を備える。ブロック31は、過渡応答に作用することを可能にする制御を極配置によって計算する。上述したシステムの3つの極を次のように記す。
ここで、速度Vにおける極の実数部をa1(V)、虚数部をb1(V)と記している。その上で、ループ化されたシステムの極を以下に設定する補償ファクタ K=[K1(V) K2(V) K3(V)]が求められる。
ここで、Tdyn11、Tdyn12、Tdyn21、Tdyn22、Tdyn31、Tdyn32は、車両の過渡応答の設定パラメータ(車両の速度Vに依存する変数)である。
【0034】
補償ファクタK(V0)は、選択された個々の速度V0について、Int. J. Control, 41(1985), 1129-1155ページに掲載された、J. Kautsky et N. K. Nicholsによる論文「Robust Pole Assignment in Linear State Feedback」に記載されている、極設定法によって計算することができる。
【0035】
これにより、コマンドの最初の部分を次のように得る。
設定パラメータが1のときは車両の動的応答は変更されず、1を超えるパラメータは車両のロール応答を増大させ、1未満のパラメータは車両のロール応答を低下させることがわかる。一例として、次のように設定することができる。
Tdyn11=0.8
Tdyn12=0
Tdyn21=0.8
Tdyn22=0
Tdyn31=0.8
Tdyn32=0
【0036】
この設定により、ロール振動を抑えながら車両の動的応答を減速させることができる。この設定は、カーブ進入時に乗員が感じる、ロール開始の唐突さを和らげることで乗員の快適性を高めることができる。こうして、ブロック31は係数K1、K2およびK3ならびにコマンドの最初の部分である「μc過渡」を出力側に供給する。
【0037】
制御ユニット11は、そのほか、ブロック31から係数K1、K2およびK3、車両の速度Vならびに横方向加速度γTを入力値とする静的コマンド「μc静的」を計算するブロック32を備える。このコマンド「μc静的」は、所定の大きさのハンドル操作を受けて生じる、車体のロール角の静的な値を設定することができる。この結果は、アクティブアンチロール装置のない同一の車両で得ることができる静的ゲイン(右辺)と比較して、次のように表すことができる。すなわち、
ここでTgsは、必要であれば速度Vに応じて変化させることができる設定パラメータである。
【0038】
コマンドの第2の部分は、パラメータTgsに応じて次のように計算される。すなわち、
パラメータTgsが1のとき、車両の静的応答は変更されず、パラメータTgsが1を超えるときは車両の静的応答は強められ、パラメータTgsが1未満のときは車両の静的応答は弱められることがわかる。一例としてTgsを0.8とすることによって、安定した転回時に車体に生じるロールを減らし、それによって乗員の快適性を顕著に改善することができる。
【0039】
制御ユニット11は、加算器33および出力34をもって完結する。加算器33は1つの入力データとしてブロック31の制御出力「μc過渡」を、もう1つの加算入力データとしてブロック32のコマンド出力「μc静的」を入力する。一方、加算器33の出力は、外乱除去モジュールの出力データとなる。
【0040】
図5に示す実施形態では操舵角α1は、計算によるロール角θc、車両のロール状態X2,cおよびアクチュエータのダイナミックレンジによりフィルタをかけ、実際に加えられるロールトルクμfを、車両のモデル31により計算するために利用される。
【0041】
図5に示す制御ユニット11は図4に示すものに近いが、モデル30が、例えば次の方程式に基づいたものであることが異なる。ここで、α1は前輪の操舵角である。
アクチュエータによって実際に加えられるトルクμfは、前記と同様、測定したものではなく、同様にアクチュエータのダイナミックレンジをモデル化して得たものである。すなわち、
【0042】
このモデルに付随する状態方程式は次のとおりである。
ただし、
であり、yは当該出力であり、X2,cは
によって定義される、車両の第2のロール状態である。
【0043】
過渡値を計算するブロック31は、図4に示したものと同様のものである。静的制御の計算ブロック32は、所定の大きさのハンドル操作を受けて生じる、車体のロール角の安定時の値を設定することができる。結果は、アクティブ・アンチロール装置のない同じ車両で得ることができる静的ゲイン(右辺)と比較して次のように表される。すなわち、
ただしTgsは、必要であれば、速度Vに応じて変化することができる設定パラメータである。
【0044】
コマンドの第2の部分はパラメータTgsに応じて次のように計算される。
式中の記号は前述のとおりである。すなわち、
制御ユニット11は前記実施形態と同様、ブロック31の出力「μ2過渡」と、ブロック32からの出力「μ2静的」とを入力する加算器33をもって完結する。
【0045】
本発明は、アクティブ・アンチロールシステムの制御を行い、開ループ戦略によって、横方向加速度または前輪の操舵角に応じて、車両の動的および静的なロール応答を設定することができる制御方法を提供する。この制御は、例えば車両の速度Vに依存することができる。車両は、運転者による要求や路面の状態にかかわらず、最も安定した挙動をとるように設計され、極めて高い安全性、高い安心感、快適性および運転の楽しみを最適化された状態で提供する。
【0046】
本発明は望むときに、とりわけ車両がカーブに入って直ちに、アンチロールバー15および16の作動の変化の恩恵を受けることができるようにし、それによって、車両の接地性および運転者が感じる運転の快適性を向上させる。
【図面の簡単な説明】
【0047】
【図1】本発明の1つの態様による制御システムを備えた車両の概略図である。
【図2】本発明の1つの態様によるシステムの論理図である。
【図3】本発明のもう1つの態様によるシステムの論理図である。
【図4】本発明のもう1つの態様による制御ユニット11のブロック図である。
【図5】本発明のもう1つの態様による制御ユニット11のブロック図である。
【特許請求の範囲】
【請求項1】
横揺れ(ロール)に作用することができる少なくとも1つのアクチュエータ(21)を備える車両(1)のロール制御方法であって、車両の横方向加速度、車両に加えられるアンチロールトルクのロール角および運転状況データから、ロール状態を予測し、ロールに作用する外乱の漸近的除去設定値を生成する方法。
【請求項2】
前記アクチュエータの設定値および横方向加速度に応じて、ロール角を予測する請求項1に記載の方法。
【請求項3】
前記アクチュエータのダイナミックレンジに応じて、ロール角を計算する請求項2に記載の方法。
【請求項4】
外乱に応じてロール角の変化を計算する請求項1から3のいずれか一項に記載の方法。
【請求項5】
センサ(14)の値により、ロール角の変化を測定する請求項1から3のいずれか一項に記載の方法。
【請求項6】
車両の速度、前輪の操舵角および/または制動圧力に応じて、前記設定値を生成する請求項1から5のいずれか一項に記載の装置。
【請求項7】
横揺れ(ロール)に作用することができる少なくとも1つのアクチュエータ(21)と、車両の横方向加速度、車両に加えられるアンチロールトルクのロール角および運転状況データからロール状態を予測するモジュール(24)と、ロールに作用する外乱の漸近的除去設定値を生成するモジュール(25)とを備える、車両のロール制御装置(11)。
【請求項8】
前記各モジュールが閉ループ構成で配置される請求項7に記載の装置。
【請求項9】
前記アクチュエータが制御可能なアンチロールバーに連結される請求項7または8に記載の装置。
【請求項10】
前記アクチュエータがアクティブサスペンションに連結される請求項7または8に記載の装置。
【請求項11】
車体と、車体に連結された少なくとも3つの車輪と、車両のロール制御装置(11)とを備える車両であって、当該装置が、ロールに作用することができる少なくとも1つのアクチュエータ(21)と、車両の横方向加速度、車両に加えられるアンチロールトルクのロール角および運転状況データからロール状態を予測するモジュール(24)と、ロールに作用する外乱の漸近的除去設定値を生成するモジュール(25)を備える車両。
【請求項1】
横揺れ(ロール)に作用することができる少なくとも1つのアクチュエータ(21)を備える車両(1)のロール制御方法であって、車両の横方向加速度、車両に加えられるアンチロールトルクのロール角および運転状況データから、ロール状態を予測し、ロールに作用する外乱の漸近的除去設定値を生成する方法。
【請求項2】
前記アクチュエータの設定値および横方向加速度に応じて、ロール角を予測する請求項1に記載の方法。
【請求項3】
前記アクチュエータのダイナミックレンジに応じて、ロール角を計算する請求項2に記載の方法。
【請求項4】
外乱に応じてロール角の変化を計算する請求項1から3のいずれか一項に記載の方法。
【請求項5】
センサ(14)の値により、ロール角の変化を測定する請求項1から3のいずれか一項に記載の方法。
【請求項6】
車両の速度、前輪の操舵角および/または制動圧力に応じて、前記設定値を生成する請求項1から5のいずれか一項に記載の装置。
【請求項7】
横揺れ(ロール)に作用することができる少なくとも1つのアクチュエータ(21)と、車両の横方向加速度、車両に加えられるアンチロールトルクのロール角および運転状況データからロール状態を予測するモジュール(24)と、ロールに作用する外乱の漸近的除去設定値を生成するモジュール(25)とを備える、車両のロール制御装置(11)。
【請求項8】
前記各モジュールが閉ループ構成で配置される請求項7に記載の装置。
【請求項9】
前記アクチュエータが制御可能なアンチロールバーに連結される請求項7または8に記載の装置。
【請求項10】
前記アクチュエータがアクティブサスペンションに連結される請求項7または8に記載の装置。
【請求項11】
車体と、車体に連結された少なくとも3つの車輪と、車両のロール制御装置(11)とを備える車両であって、当該装置が、ロールに作用することができる少なくとも1つのアクチュエータ(21)と、車両の横方向加速度、車両に加えられるアンチロールトルクのロール角および運転状況データからロール状態を予測するモジュール(24)と、ロールに作用する外乱の漸近的除去設定値を生成するモジュール(25)を備える車両。
【図1】

【図2】
【図3】
【図4】
【図5】

【図2】
【図3】
【図4】
【図5】
【公表番号】特表2009−520634(P2009−520634A)
【公表日】平成21年5月28日(2009.5.28)
【国際特許分類】
【出願番号】特願2008−546531(P2008−546531)
【出願日】平成18年10月19日(2006.10.19)
【国際出願番号】PCT/FR2006/051061
【国際公開番号】WO2007/071854
【国際公開日】平成19年6月28日(2007.6.28)
【出願人】(503041797)ルノー・エス・アー・エス (286)
【Fターム(参考)】
【公表日】平成21年5月28日(2009.5.28)
【国際特許分類】
【出願日】平成18年10月19日(2006.10.19)
【国際出願番号】PCT/FR2006/051061
【国際公開番号】WO2007/071854
【国際公開日】平成19年6月28日(2007.6.28)
【出願人】(503041797)ルノー・エス・アー・エス (286)
【Fターム(参考)】
[ Back to top ]