
車両の減速制御装置
【課題】コーナに対する減速制御が行われる場合に、運転者に与える違和感を最小限に抑制することが可能な車両の減速制御装置を提供する。
【解決手段】車両前方のコーナを検出する手段(S101)と、車両の減速制御を行う手段(S108)と、前記コーナの大きさと前記コーナを旋回するときの目標横加速度とに基づいて目標車速を求める手段(S103)と、前記目標車速と実車速との差が所定範囲内であるときに前記減速制御を終了する手段(S107)とを備え、前記所定範囲は、前記コーナの大きさに基づいて異なる値に設定される(S104、S106)。
【解決手段】車両前方のコーナを検出する手段(S101)と、車両の減速制御を行う手段(S108)と、前記コーナの大きさと前記コーナを旋回するときの目標横加速度とに基づいて目標車速を求める手段(S103)と、前記目標車速と実車速との差が所定範囲内であるときに前記減速制御を終了する手段(S107)とを備え、前記所定範囲は、前記コーナの大きさに基づいて異なる値に設定される(S104、S106)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の減速制御装置に関する。
【背景技術】
【0002】
特開平10−269499号公報(特許文献1)には、カーブ手前でドライバの意思に応じて違和感なく自動減速を実施可能な車両の車速制御装置として、以下の技術が開示されている。即ち、車両前方の道路のカーブの存在を検出するカーブ検出手段と、カーブの曲率半径Rを検出する曲率半径検出手段と、ドライバの運転状態(スポーティ度)を検出するドライバ状態検出手段と、ドライバの運転状態情報に基づき、カーブをトレース可能な車両の許容横加速度を設定する許容横加速度設定手段と、曲率半径情報と許容横加速度とに基づき、カーブでの車両の許容旋回速度を演算する許容旋回速度演算手段と、車両がカーブに進入する前に許容旋回速度に向け車速を低減させ車両を減速制御する減速手段とを備えている。
【0003】
【特許文献1】特開平10−269499号公報
【特許文献2】特開平6−36187号公報
【特許文献3】特開平10−141496号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
従来より、コーナに対する車両の減速制御が行われる場合、減速制御が行われて車速が低下し、車速が、コーナの旋回半径R(コーナの大きさ、以下「コーナR」ということがある)に対応して設定された車速のしきい値以下まで低下したときに、そのコーナに対する減速制御が終了するようになっていた。ここで、発明者らによる研究の結果、コーナRが大きいコーナに対して減速制御が行われた場合には、その車両の運転者に違和感(過剰減速感)を与えることが多いという新たな知見が得られた。
【0005】
コーナに対する減速制御が行われる場合に、運転者に違和感が少ないことが望まれる。
【0006】
本発明は、コーナに対する減速制御が行われる場合に、運転者に与える違和感を最小限に抑制することが可能な車両の減速制御装置を提供することを目的としている。
【課題を解決するための手段】
【0007】
本発明の車両の減速制御装置は、車両前方のコーナを検出する手段と、車両の減速制御を行う手段と、前記コーナの大きさと前記コーナを旋回するときの目標横加速度とに基づいて目標車速を求める手段と、前記目標車速と実車速との差が所定範囲内であるときに前記減速制御を終了する手段とを備え、前記所定範囲は、前記コーナの大きさに基づいて異なる値に設定されることを特徴としている。
【0008】
本発明の車両の減速制御装置において、前記目標車速は、前記コーナの大きさと前記コーナを旋回するときの目標横加速度を2変数とするマップ、又は下記式1のいずれか一方により求められる
【数1】

ことを特徴としている。
【0009】
本発明の車両の減速制御装置において、前記所定範囲は、前記コーナの大きさが大きいときは、前記コーナの大きさが小さいときに比べて、大きな値に設定されることを特徴としている。
【0010】
本発明の車両の減速制御装置は、車両前方のコーナを検出する手段と、車両の減速制御を行う手段とを備え、前記コーナの大きさと前記コーナを旋回するときの目標横加速度を2変数とするマップ、又は下記式2のいずれか一方により目標車速を求める手段と、前記目標車速と、前記コーナの大きさに基づいて設定された目標車速の補正値とに基づいて、前記減速制御の終了時期を判断する
【数2】
ことを特徴としている。
【0011】
本発明の車両の減速制御装置において、前記補正値は、前記コーナの大きさが大きいときは、前記コーナの大きさが小さいときに比べて、大きな値に設定されることを特徴としている。
【0012】
本発明の車両の減速制御装置は、車両前方のコーナを検出する手段と、目標車速に基づいて車両の減速制御を行う手段と、前記コーナの大きさと前記コーナを旋回するときの目標横加速度とに基づいて前記目標車速を求める手段とを備え、前記目標横加速度は、前記コーナの大きさに基づいて異なる値に設定されることを特徴としている。
【発明の効果】
【0013】
本発明によれば、コーナに対する減速制御が行われる場合に、運転者に与える違和感を最小限に抑制することが可能となる。
【発明を実施するための最良の形態】
【0014】
以下、本発明の一実施形態につき図面を参照しつつ詳細に説明する。
【0015】
(第1実施形態)
図1から図6を参照して、本発明の車両の減速制御装置の第1実施形態について説明する。
【0016】
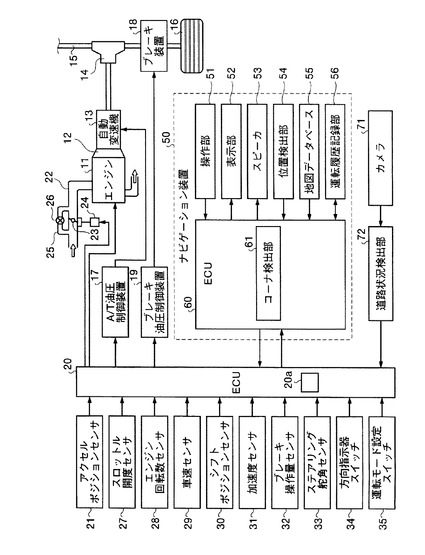
図3に示すように、内燃機関としてのエンジン11には、トルクコンバータ12を有する自動変速機13が連結されており、エンジン11の駆動力は、このトルクコンバータ12を介して自動変速機13に入力され、デファレンシャルギヤ14及びドライブシャフト15を介して駆動輪16に伝達される。また、自動変速機13は、A/T油圧制御装置17により車両の運転状態に応じて変速比が自動的に制御される。ブレーキ装置18は、ブレーキ油圧制御装置19によって制御されて、車両を制動する。
【0017】
車両には、エンジン11や自動変速機13やブレーキ装置18などを制御する電子制御ユニット(ECU)20が設けられている。ECU20は、エンジン11、自動変速機13(A/T油圧制御装置17)及びブレーキ装置18(ブレーキ油圧制御装置19)の総合的な制御を行う。ECU20は、減速制御終了判定しきい値算出部20aを備えている。減速制御終了判定しきい値算出部20aは、減速制御終了判定しきい値Vtrgを算出する。
【0018】
車両には、アクセルペダルの操作量(アクセル開度)を検出するアクセルポジションセンサ21が設けられている。アクセルポジションセンサ21により検出されたアクセル開度を示す信号は、ECU20に出力される。エンジン11の吸気管22には、スロットルコントロールバルブ23が設けられている。スロットルコントロールバルブ23は、スロットルアクチュエータ24により開閉可能とされている。ECU20は、スロットルアクチュエータ24にスロットルコントロールバルブ23を動作させる。ECU20は、スロットルコントロールバルブ23によるスロットル開度が、アクセル開度に応じたものとなるようにスロットルアクチュエータ24を制御する。
【0019】
吸気管22には、スロットルコントロールバルブ23をバイパスするバイパス通路25が設けられている。バイパス通路25には、エンジン11のアイドル回転数を制御するためにスロットルコントロールバルブ23の全閉時の吸気量を制御するアイドルスピードコントロールバルブ(ISCバルブ)26が設けられている。スロットルコントロールバルブ23の全閉状態(アイドル状態)及びスロットル開度を検出するアイドルスイッチ付スロットル開度センサ27が設けられている。アイドルスイッチ付スロットル開度センサ27によって検出されたアイドル状態及びスロットル開度のそれぞれを示す信号は、ECU20に出力される。
【0020】
エンジン11には、エンジン回転数(エンジン回転速度)を検出するエンジン回転数センサ28が設けられている。エンジン回転数センサ28により検出されたエンジン回転数を示す信号は、ECU20に出力される。
車速センサ29は、車速に比例する自動変速機13の出力軸の回転数を検出する。車速センサ29により検出された車速を示す信号は、ECU20に出力される。
【0021】
シフトポジションセンサ30は、運転者が操作するシフトレバーの位置(シフトポジション)を検出する。シフトポジションセンサ30により検出されたシフトポジションを示す信号は、ECU20に出力される。
加速度センサ31は、車両の減速度(減速加速度)を検出する。加速度センサ31により検出された減速度を示す信号は、ECU20に出力される。
【0022】
ブレーキ操作量センサ32は、ブレーキ装置18の操作量を検出する。ブレーキ操作量センサ32により検出されたブレーキ装置18の操作量を示す信号は、ECU20に出力される。ステアリング舵角センサ33は、運転者により操作されるステアリングの舵角を検出する。ステアリング舵角センサ33により検出されたステアリングの舵角を示す信号は、ECU20に出力される。方向指示器スイッチ34は、運転者により操作され、方向指示器(図示せず)により指示される方向を特定するための操作が行われる。方向指示器により指示される方向を示す信号は、ECU20に出力される。
【0023】
運転モード設定スイッチ35は、運転者により操作され、運転モードを設定するための操作が行われる。運転者により、運転モード設定スイッチ35が操作されることで、スポーツ走行指向又は通常走行指向の運転モードが設定され、その設定された運転モードを示す信号がECU20に出力される。
【0024】
ECU20は、変速マップを有しており、スロットル開度、車速などに基づいて、自動変速機13の変速段を決定し、この決定された変速段を成立させるようにA/T油圧制御装置17を制御することができる。また、ECU20には、図1に示すフローチャートの制御ステップが記述されたプログラムが格納されている。
【0025】
ナビゲーション装置50は、自車両を所定の目的地に誘導することを基本的な機能としており、ECU60と、操作部51と、表示部52と、スピーカ53と、位置検出部54と、地図データベース55と、運転履歴記録部56とを備えている。ナビゲーション装置50のECU60は、ECU20と双方向の通信が可能である。
【0026】
ナビゲーション装置50は、運転者に車両の現在地周りの道路情報を知らせて、車両の目的地までの走行経路を誘導する。操作部51には、目的地などの指示データが入力される。表示部52には、現在地周辺の地図情報、現在位置、目的位置、経路などの情報が表示される。スピーカ53からは、案内音声が出力される。
【0027】
ECU60は、入力された情報に基づいて、ナビゲーション処理等の各種演算処理を行う。ECU60のROMには、目的地までの経路の検索、経路中の走行案内、特定区間の決定等を行うための各種プログラムが格納されている。
【0028】
位置検出部54は、GPSレシーバ、地磁気センサ、距離センサ、ビーコンセンサ、ジャイロセンサとを備えており、自車の位置を検出し、その検出した自車の位置を示すデータをECU60に出力する。
【0029】
地図データベース55には、車両の走行に必要な情報(地図、直線路、コーナ、登降坂、高速道路など)が記憶されている。地図データベース55は、地図データファイル、交差点データファイル、ノードデータファイル、道路データファイルを備えている。これら各ファイルには、経路探索を行うとともに、探索した経路に沿って案内図を表示するための各種データが格納されている。ECU60は、地図データベース55を参照して、必要な情報を読み出す。
【0030】
運転履歴記録部56には、車両が走行した走行路、及び車両が走行路を走行した日時などの情報が記録される。ECU60は、必要に応じて、運転履歴記録部56から運転履歴のデータを読み出す。
【0031】
ECU60は、操作部51から入力された目的地などの指示データ及び位置検出部54により検出された自車位置に基づいて、地図データベース55から必要な地図情報を検索し、その検索により得られた経路の情報を表示部52に表示させる。ECU60は、操作部51から入力された目的地などの指示データが入力されていない場合には、自車位置の周辺の道路情報を表示部52に表示する。
【0032】
ECU60は、コーナ検出部61を備えている。コーナ検出部61は、地図データベース55に格納されたデータに基づいて、先方の道路にコーナがあるか否かを検出する。
【0033】
車両には、カメラ71と、道路状況検出部72が設けられている。カメラ71は、車両の前方の道路状況を撮像する。道路状況検出部72は、カメラ71により撮像されたデータに基づいて、車両の前方の道路状況を検出する。道路状況検出部72による検出結果は、ECU20に出力される。
【0034】
上記のように、従来より、コーナに対する車両の減速制御が行われる場合、減速制御が行われて車速が低下し、車速が、コーナRに対応して設定された車速のしきい値以下まで低下したときに、そのコーナに対する減速制御が終了するようになっている。発明者らによる研究の結果、コーナRが大きいコーナに対して減速制御が行われた場合には、その車両の運転者に違和感(過剰減速感)を与えることが多いという新たな知見が得られた。その理由について以下に説明する。
【0035】
コーナに対する減速制御が行われる場合に、減速制御が終了(復帰)するときの車速のしきい値は、上記のようにコーナRに対応して設定される。この場合、上記車速のしきい値は、例えば下記の式3により求められる目標旋回車速Vreqとして設定されることがある。
【0036】
【数3】
ここで、旋回横G Gyは、車両がコーナを旋回するときの横Gの値(目標値)である。
【0037】
または、上記車速のしきい値は、上記式3により算出される代わりに、予め設定された、コーナRと旋回横Gを2変数とするマップ(コーナRと旋回横Gの2つの条件に応じた上記車速のしきい値が予め設定されているマップ)が参照されることにより、求められることができる。
【0038】
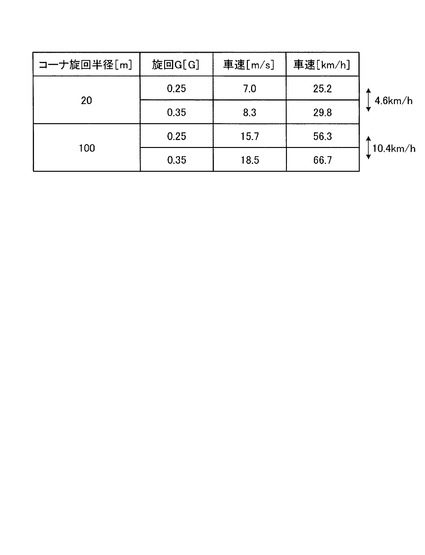
図2は、コーナR(コーナ旋回半径)と旋回横Gに基づいて、上記式3から求められる上記車速のしきい値(目標旋回車速Vreq)を示したものである。旋回横Gとしては、実際の減速制御において設定される可能性のある数値例として、0.25Gと0.35Gの2つの値が挙げられている。
【0039】
コーナ旋回半径[m]が20の場合、旋回横G[G]が0.25の場合の目標旋回車速Vreqは、7.0[m/s]=25.2[km/h]であり、一方、旋回横G[G]が0.35の場合の目標旋回車速Vreqは、8.3[m/s]=29.8[km/h]である。これに対して、コーナ旋回半径[m]が100の場合、旋回横G[G]が0.25の場合の目標旋回車速Vreqは、15.7[m/s]=56.3[km/h]であり、一方、旋回横G[G]が0.35の場合の目標旋回車速Vreqは、18.5[m/s]=66.7[km/h]である。
【0040】
上記のように、コーナ旋回半径[m]が20の場合、旋回横G[G]が0.25と0.35の場合の目標旋回車速Vreqの差は、4.6km/hであるのに対し、コーナ旋回半径[m]が100の場合には、旋回横G[G]が0.25と0.35の場合の目標旋回車速Vreqの差は、10.4km/hである。このことから、旋回横Gがある特定の値(コーナ旋回半径の大きさに関わらず、ある一定の値)に設定され、その旋回横Gに基づいて目標旋回車速Vreqが設定された場合、ヘアピンは誰が走行してもその目標旋回車速Vreqと実際の通過車速との差は小さい(自由度が小さい)のに対し、コーナRが大きい場合には、目標旋回車速Vreqと実際の通過車速との差が大きい(自由度が大きい)。
【0041】
このように、コーナRが大きい場合には、コーナRが小さい場合に比べて、ある特定の値に設定された旋回横Gに基づいて設定された目標旋回車速Vreqから離れた値(その目標旋回車速Vreqよりも相対的に大幅に高い車速)で走行することに対する自由度が大きい。このことから、コーナに対する減速制御が終了するときの車速のしきい値を、目標旋回車速Vreqとすると、特にコーナRが大きい場合には、運転者のフィーリングに合わず違和感を与える場合がある。以上のことから、コーナRが大きい場合には、コーナRが小さい場合に比べて、減速制御が終了するときの車速のしきい値は、目標旋回車速Vreqよりも相対的に大幅に高い車速に設定する方が運転者のフィーリングに合うという知見が得られた。
【0042】
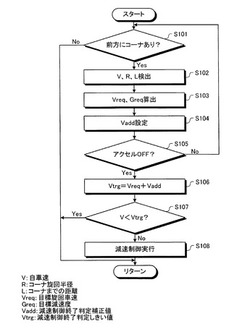
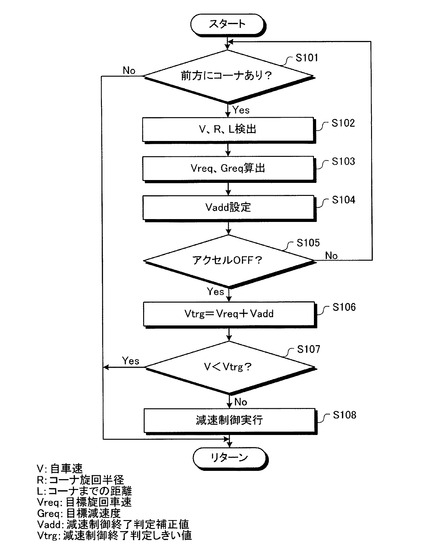
図1及び図3を参照して、本実施形態の動作を説明する。
【0043】
[ステップS101]
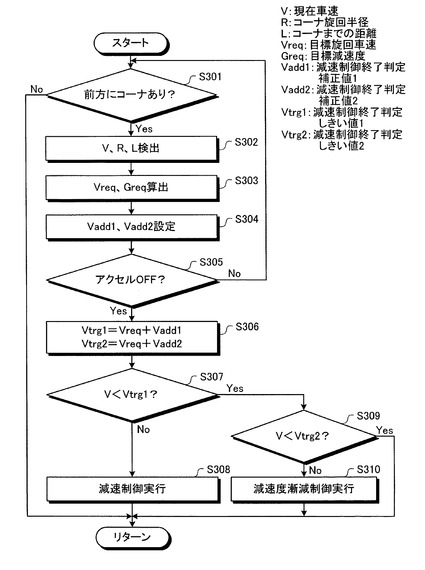
ステップS101において、ナビゲーション装置50のECU60のコーナ検出部61は、位置検出部54と地図データベース55からのデータに基づいて、現在位置の前方にコーナがあるか否かを検出する。その判定の結果、肯定的に判定された場合にはステップS102に進み、そうでない場合には本制御フローはリターンされる。
【0044】
[ステップS102]
ステップS102において、ECU20は、自車の現在の車速V、コーナR、コーナまでの距離Lを求める。ECU20は、車速センサ29から入力したデータに基づいて、自車の現在の車速Vを求める。また、ECU20は、位置検出部54と地図データベース55からのデータに基づいて、コーナR、コーナまでの距離Lを求める。ステップS102の次にステップS103が行われる。
【0045】
[ステップS103]
ステップS103では、ECU20により、コーナの目標旋回車速Vreq及び目標減速度Greqが算出される。目標旋回車速Vreqの算出は、ECU20の減速制御終了判定しきい値算出部20aにより行われる。減速制御終了判定しきい値算出部20aは、上記ステップS2で求めたコーナRと、予め設定された旋回横Gに基づいて、上記式[数3]より、目標旋回車速Vreq[m/s]を求める。
【0046】
ECU20は、上記ステップS102で求めた自車速Vと、コーナまでの距離Lと、目標旋回車速Vreqに基づいて、下記式[数4]より、目標減速度Greqを求める。ステップS103の次に、ステップS104が行われる。
【数4】
【0047】
[ステップS104]
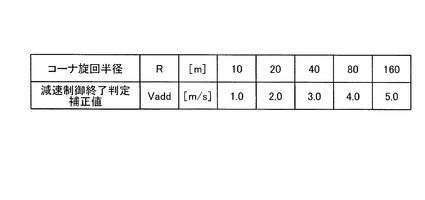
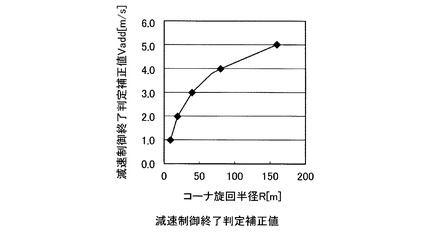
ステップS104において、ECU20の減速制御終了判定しきい値算出部20aは、予め格納された図4に示すマップを参照して、減速制御終了判定補正値Vaddを求める。図4に示すように、減速制御終了判定補正値Vaddは、コーナR(コーナ旋回半径)に基づいて求められる。図4及び図5に示すように、コーナRが小さいほど、減速制御終了判定補正値Vaddが小さくなるように設定されている。上述した、コーナRが大きい場合には、コーナRが小さい場合に比べて、減速制御が終了するときの車速のしきい値(減速制御終了判定しきい値Vtrg)は、目標旋回車速Vreqよりも相対的に大幅に高い車速に設定される方が運転者のフィーリングに合うという知見に基づくものである。ステップS104の次に、ステップS105が行われる。
【0048】
[ステップS105]
ステップS105において、ECU20は、運転者の減速意図が検出されたか否かを判定する。ステップS105において、運転者の減速意図とは、アクセルOFF(アクセルを緩める)、ブレーキON、マニュアルダウンシフト、方向指示器の操作、オーバードライブのOFFなどの減速のための操作により、エンジンブレーキを増加させたり、減速度を増加させる動作を意味している。方向指示器の操作に関しては、コーナがある分岐路へ経路を取ることの意思表示として、その分岐路方向への方向指示器の操作の有無が検出される。
【0049】
アクセルOFFの操作の有無は、スロットル開度センサ27からの信号に基づいて、アクセルがOFFの状態(全閉)か否かが判定されることができる。また、ブレーキONの操作の有無は、ブレーキ操作量センサ32からの信号に基づいて、判定されることができる。マニュアルダウンシフトの操作の有無は、シフトポジションセンサ30からの信号に基づいて判定されることができる。方向指示器の操作の有無は、方向指示器スイッチ34からの信号に基づいて判定されることができる。
【0050】
これらの判定の結果、運転者の減速意図が検出された場合(ステップS105−Y)には、ステップS106に進み、そうでない場合(ステップS105−N)には、本制御フローはリターンされる。なお、本例では、運転者の減速意図として、アクセルOFFが検出されることができる。
【0051】
なお、ステップS105においては、カメラ71により撮像されたデータに基づいて、道路状況検出部72が車両の前方の道路状況を検出し、その検出結果によって、ECU20は、ステップS105の判定結果として、異なる内容の判定をすることができる。
【0052】
即ち、道路状況検出部72の判定の結果、車両が前車(図示せず)に追いついたことを理由として、運転者の減速意図(減速操作)が検出されたと判定される場合には、ECU20により、ステップS105の判定結果は否定的なもの(ステップS105−N)とされることができる。
【0053】
[ステップS106]
ステップS106において、減速制御終了判定しきい値算出部20aは、上記ステップS103で求めた目標旋回車速Vreq及び、上記ステップS104で求めた減速制御終了判定補正値Vaddに基づいて、減速制御終了判定しきい値Vtrgを算出する。減速制御終了判定しきい値Vtrgは下記式により求められる。
Vtrg=Vreq+Vadd
ステップS106の次に、ステップS107が行われる。
【0054】
[ステップS107]
ステップS107において、ECU20により、現在の車速Vが上記ステップS106で求めた減速制御終了判定しきい値Vtrgよりも低いか否かが判定される。ステップS107では、車速Vが減速制御終了判定しきい値Vtrgに近づいたか否かが判定され、その判定の結果、否定的に判定された場合には、減速が不十分であるとして、ステップS108に進む。一方、その判定の結果、肯定的に判定された場合には、減速が十分にできたとして、本制御フローはリターンされる。
【0055】
[ステップS108]
ステップS108において、ECU20は、減速制御を実施する。ECU20は、上記ステップS103で求めた目標減速度Greqが車両に作用するように、エンジン11、油圧制御装置17及びブレーキ油圧制御装置19の少なくともいずれか一方を制御する。即ち、エンジン11のトルクダウン、自動変速機13のダウンシフト、ブレーキ装置18の作動、又は、自動変速機13及び自動変速機13の協調制御によって、車両に目標減速度Greqが作用するように制御する。ステップS108の次には、本制御フローはリターンされる。
【0056】
次に、図6を参照して、本実施形態の動作について説明する。
【0057】
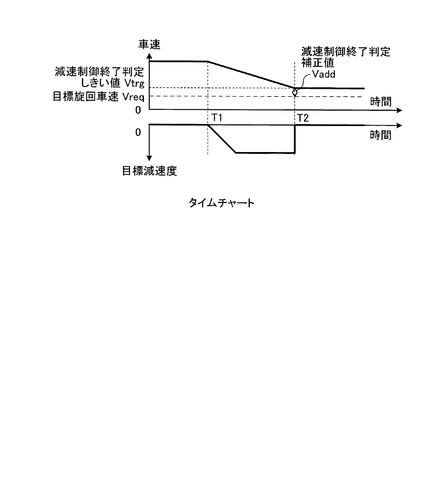
時刻T1にてコーナに対する減速制御(ステップS108)が開始されると、車速が低下するとともに、減速度が増大する。時刻T2にて、車速が、減速制御終了判定しきい値Vtrg(=目標旋回車速Vreq+減速制御終了判定補正値Vadd)に達すると(ステップS107−Y)、減速制御が終了し、これにより、車速の低下が抑制されるとともに、減速度が零となる。
【0058】
本実施形態によれば、以下の効果が得られる。
【0059】
コーナRが小さい場合、目標旋回車速Vreqと実際の通過車速の差が小さく(自由度小)、コーナRが大きい場合には、目標旋回車速Vreqと実際の通過車速の差が大きい(自由度大)。このため、減速制御終了判定しきい値を目標旋回車速Vreqとすると、運転者のフィーリングに合わず、違和感を生じる場合がある。そこで、本実施形態では、減速制御終了判定しきい値VtrgをコーナRに応じて変更し、かつ、コーナRが小さいほど減速制御終了判定しきい値Vtrgを小さくすることで、違和感が発生する頻度及び程度を低減することができる。運転者の違和感の少ない旋回車速に制御することができる。
【0060】
本実施形態では、コーナRが大きい場合には、コーナRが小さい場合に比べて、減速制御終了判定補正値Vaddが大きな値に設定され、その結果、減速制御が終了するときの車速のしきい値である減速制御終了判定しきい値Vtrgが、目標旋回車速Vreqよりも相対的に大幅に高い車速に設定される。即ち、コーナRが大きいときには、より高い車速でコーナを走行することに対する自由度が大きいことを考慮して、より高い車速で減速制御が終了するように構成されている。このことから、本実施形態では、コーナRが大きい場合には、目標旋回車速Vreqからより高い車速の状態で、コーナに対する減速制御が終了(復帰)するように構成されている。よって、従来に比べて、運転者のフィーリングが向上する。
【0061】
(第2実施形態)
次に、図7及び図8を参照して、第2実施形態について説明する。
第2実施形態において、上記第1実施形態と同様の点については、同じ符号を付して、その詳細な説明を省略することとする。
【0062】
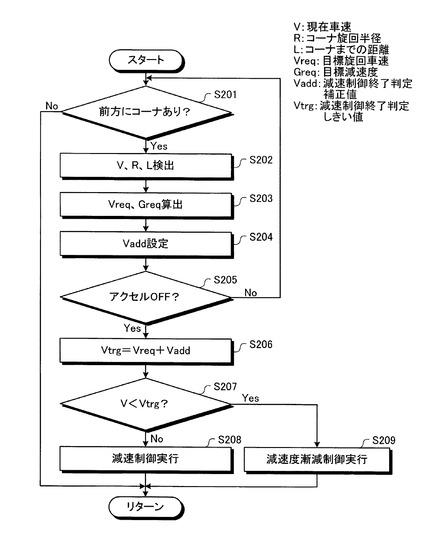
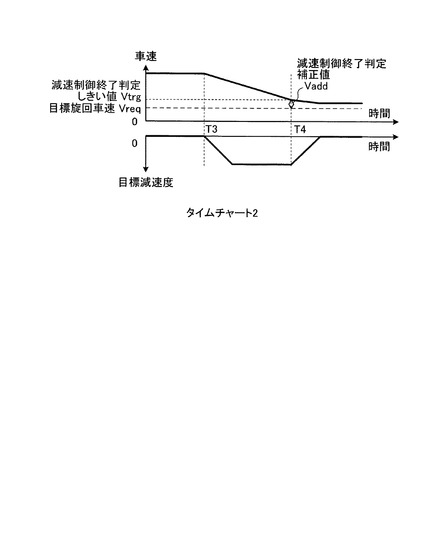
図7において、ステップS201〜ステップS207は、それぞれ図1のステップS101〜ステップS107と対応している。図7では、ステップS207にて、現在の車速Vが減速制御終了判定しきい値Vtrgよりも小さい値であると判定された場合(ステップS207−Y)には、減速度を漸次減少させる制御が開始される(ステップS209)。図8に示すように、時刻T4にて、車速が、減速制御終了判定しきい値Vtrg(=目標旋回車速Vreq+減速制御終了判定補正値Vadd)に達すると(ステップS207−Y)、減速度を漸減させる制御が行われる(ステップS209)。
【0063】
本実施形態によれば、減速制御が終了したとき(T4)の急激な減速度の抜け感やショックが抑制されるため、運転者のドライバビリティに優れる。
【0064】
(第3実施形態)
次に、図9から図13を参照して、第3実施形態について説明する。
第3実施形態において、上記実施形態と同様の点については、同じ符号を付して、その詳細な説明を省略することとする。
【0065】
第3実施形態は、上記第1及び第2実施形態を組み合わせたものである。
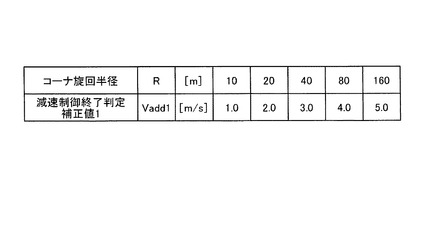
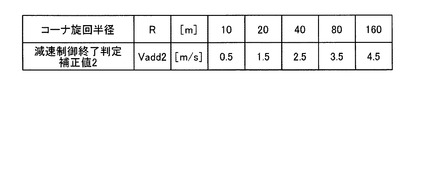
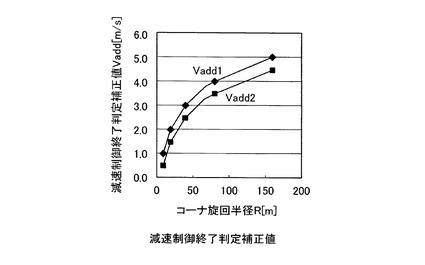
本実施形態では、図10及び図11のマップが参照されて、2段階の減速制御終了判定補正値Vadd1,2が求められる(図9のステップS304)。これにより、大きさの異なる2種類の減速制御終了判定しきい値Vtrg1(=目標旋回車速Vreq+減速制御終了判定補正値Vadd1)、及び減速制御終了判定しきい値Vtrg2(=目標旋回車速Vreq+減速制御終了判定補正値Vadd2)が設定される(ステップS306)。
【0066】
本例では、減速制御終了判定補正値Vadd1>減速制御終了判定補正値Vadd2である。また、本実施形態の減速制御終了判定補正値Vadd1が上記第1及び第2実施形態の減速制御終了判定補正値Vaddに相当し、減速制御終了判定補正値Vadd2は、その減速制御終了判定補正値Vadd1よりも小さな値に設定されている。
【0067】
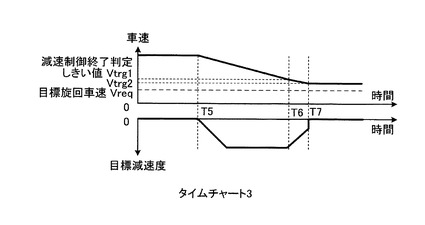
図13に示すように、時刻T5にて、車速が減速制御終了判定しきい値Vtrg1よりも小さいか否かが判定され(ステップS307)、その判定の結果、否定的に判定されると(ステップS307−N)、減速制御が開始される(ステップS308)。これにより、車速が低下するとともに、減速度が増大する。その後、時刻T6にて、車速が減速制御終了判定しきい値Vtrg1よりも小さくなったことが検出されると(ステップS307−Y)、減速制御終了判定しきい値Vtrg2よりも小さくなったことが検出される前までは(ステップS309−N)、減速度の漸減制御が開始される(ステップS310)。その後、時刻T7にて、車速が、減速制御終了判定しきい値Vtrg2よりも小さくなったことが検出されると(ステップS309−Y)、減速制御が終了する。
【0068】
(第4実施形態)
上記実施形態では、旋回横Gがある特定の値(コーナRの大きさに関わらず、ある一定の値)に設定され、その旋回横Gに基づいて目標旋回車速Vreqが設定されることが前提とされ、コーナRの大きさによって減速制御終了判定補正値Vaddを変えていた。第4実施形態では、これに代えて、以下のような構成にすることができる。
【0069】
コーナRの大きさによって、旋回横G自身を変える(コーナRが大きいときには旋回横Gを相対的に大きくする)。即ち、コーナRによって値の異なる減速制御終了判定補正値Vaddを用いる代わりに、コーナRによって旋回横Gの値を変える。これにより、コーナRが大きいときには、従来の目標旋回車速Vreqよりも高い車速のしきい値となり、運転者のフィーリングに合う。現状では、減速が必要なコーナRの大きさを考えると、コーナRによらず、旋回横Gを一定の値にすることで問題ないが、高速コーナ(コーナRが大)になればなるほど、直線に近くなるので、旋回横Gを一定とする必要性は低下する。このことから、コーナRに基づいて旋回横Gを設定することには意義がある。
【図面の簡単な説明】
【0070】
【図1】本発明の車両の減速制御装置の第1実施形態の動作を示すフローチャートである。
【図2】本発明の車両の減速制御装置の第1実施形態において、コーナRと車速との関係を説明するための図である。
【図3】本発明の車両の減速制御装置の第1実施形態の概略構成図である。
【図4】本発明の車両の減速制御装置の第1実施形態の減速制御終了判定補正値を求めるマップである。
【図5】本発明の車両の減速制御装置の第1実施形態において、コーナRと減速制御終了判定補正値との関係を示すグラフである。
【図6】本発明の車両の減速制御装置の第1実施形態の動作を説明するためのタイムチャートである。
【図7】本発明の車両の減速制御装置の第2実施形態の動作を示すフローチャートである。
【図8】本発明の車両の減速制御装置の第2実施形態の動作を説明するためのタイムチャートである。
【図9】本発明の車両の減速制御装置の第3実施形態の動作を示すフローチャートである。
【図10】本発明の車両の減速制御装置の第3実施形態において、コーナRと減速制御終了判定補正値1との関係を示すグラフである。
【図11】本発明の車両の減速制御装置の第3実施形態において、コーナRと減速制御終了判定補正値2との関係を示すグラフである。
【図12】本発明の車両の減速制御装置の第3実施形態において、コーナRと減速制御終了判定補正値1,2との関係を示すグラフである。
【図13】本発明の車両の減速制御装置の第3実施形態の動作を説明するためのタイムチャートである。
【符号の説明】
【0071】
11 エンジン
13 自動変速機
17 A/T油圧制御装置
18 ブレーキ装置
19 ブレーキ油圧制御装置
20 ECU
21 アクセルポジションセンサ
27 スロットル開度センサ
28 エンジン回転数センサ
29 車速センサ
30 シフトポジションセンサ
31 加速度センサ
32 ブレーキ操作量センサ
33 ステアリング舵角センサ
34 方向指示器スイッチ
35 運転モード設定スイッチ
50 ナビゲーション装置
54 位置検出部
55 地図データベース
56 運転履歴記録部
60 ECU
61 コーナ検出部
71 カメラ
72 道路状況検出部
【技術分野】
【0001】
本発明は、車両の減速制御装置に関する。
【背景技術】
【0002】
特開平10−269499号公報(特許文献1)には、カーブ手前でドライバの意思に応じて違和感なく自動減速を実施可能な車両の車速制御装置として、以下の技術が開示されている。即ち、車両前方の道路のカーブの存在を検出するカーブ検出手段と、カーブの曲率半径Rを検出する曲率半径検出手段と、ドライバの運転状態(スポーティ度)を検出するドライバ状態検出手段と、ドライバの運転状態情報に基づき、カーブをトレース可能な車両の許容横加速度を設定する許容横加速度設定手段と、曲率半径情報と許容横加速度とに基づき、カーブでの車両の許容旋回速度を演算する許容旋回速度演算手段と、車両がカーブに進入する前に許容旋回速度に向け車速を低減させ車両を減速制御する減速手段とを備えている。
【0003】
【特許文献1】特開平10−269499号公報
【特許文献2】特開平6−36187号公報
【特許文献3】特開平10−141496号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
従来より、コーナに対する車両の減速制御が行われる場合、減速制御が行われて車速が低下し、車速が、コーナの旋回半径R(コーナの大きさ、以下「コーナR」ということがある)に対応して設定された車速のしきい値以下まで低下したときに、そのコーナに対する減速制御が終了するようになっていた。ここで、発明者らによる研究の結果、コーナRが大きいコーナに対して減速制御が行われた場合には、その車両の運転者に違和感(過剰減速感)を与えることが多いという新たな知見が得られた。
【0005】
コーナに対する減速制御が行われる場合に、運転者に違和感が少ないことが望まれる。
【0006】
本発明は、コーナに対する減速制御が行われる場合に、運転者に与える違和感を最小限に抑制することが可能な車両の減速制御装置を提供することを目的としている。
【課題を解決するための手段】
【0007】
本発明の車両の減速制御装置は、車両前方のコーナを検出する手段と、車両の減速制御を行う手段と、前記コーナの大きさと前記コーナを旋回するときの目標横加速度とに基づいて目標車速を求める手段と、前記目標車速と実車速との差が所定範囲内であるときに前記減速制御を終了する手段とを備え、前記所定範囲は、前記コーナの大きさに基づいて異なる値に設定されることを特徴としている。
【0008】
本発明の車両の減速制御装置において、前記目標車速は、前記コーナの大きさと前記コーナを旋回するときの目標横加速度を2変数とするマップ、又は下記式1のいずれか一方により求められる
【数1】
ことを特徴としている。
【0009】
本発明の車両の減速制御装置において、前記所定範囲は、前記コーナの大きさが大きいときは、前記コーナの大きさが小さいときに比べて、大きな値に設定されることを特徴としている。
【0010】
本発明の車両の減速制御装置は、車両前方のコーナを検出する手段と、車両の減速制御を行う手段とを備え、前記コーナの大きさと前記コーナを旋回するときの目標横加速度を2変数とするマップ、又は下記式2のいずれか一方により目標車速を求める手段と、前記目標車速と、前記コーナの大きさに基づいて設定された目標車速の補正値とに基づいて、前記減速制御の終了時期を判断する
【数2】
ことを特徴としている。
【0011】
本発明の車両の減速制御装置において、前記補正値は、前記コーナの大きさが大きいときは、前記コーナの大きさが小さいときに比べて、大きな値に設定されることを特徴としている。
【0012】
本発明の車両の減速制御装置は、車両前方のコーナを検出する手段と、目標車速に基づいて車両の減速制御を行う手段と、前記コーナの大きさと前記コーナを旋回するときの目標横加速度とに基づいて前記目標車速を求める手段とを備え、前記目標横加速度は、前記コーナの大きさに基づいて異なる値に設定されることを特徴としている。
【発明の効果】
【0013】
本発明によれば、コーナに対する減速制御が行われる場合に、運転者に与える違和感を最小限に抑制することが可能となる。
【発明を実施するための最良の形態】
【0014】
以下、本発明の一実施形態につき図面を参照しつつ詳細に説明する。
【0015】
(第1実施形態)
図1から図6を参照して、本発明の車両の減速制御装置の第1実施形態について説明する。
【0016】
図3に示すように、内燃機関としてのエンジン11には、トルクコンバータ12を有する自動変速機13が連結されており、エンジン11の駆動力は、このトルクコンバータ12を介して自動変速機13に入力され、デファレンシャルギヤ14及びドライブシャフト15を介して駆動輪16に伝達される。また、自動変速機13は、A/T油圧制御装置17により車両の運転状態に応じて変速比が自動的に制御される。ブレーキ装置18は、ブレーキ油圧制御装置19によって制御されて、車両を制動する。
【0017】
車両には、エンジン11や自動変速機13やブレーキ装置18などを制御する電子制御ユニット(ECU)20が設けられている。ECU20は、エンジン11、自動変速機13(A/T油圧制御装置17)及びブレーキ装置18(ブレーキ油圧制御装置19)の総合的な制御を行う。ECU20は、減速制御終了判定しきい値算出部20aを備えている。減速制御終了判定しきい値算出部20aは、減速制御終了判定しきい値Vtrgを算出する。
【0018】
車両には、アクセルペダルの操作量(アクセル開度)を検出するアクセルポジションセンサ21が設けられている。アクセルポジションセンサ21により検出されたアクセル開度を示す信号は、ECU20に出力される。エンジン11の吸気管22には、スロットルコントロールバルブ23が設けられている。スロットルコントロールバルブ23は、スロットルアクチュエータ24により開閉可能とされている。ECU20は、スロットルアクチュエータ24にスロットルコントロールバルブ23を動作させる。ECU20は、スロットルコントロールバルブ23によるスロットル開度が、アクセル開度に応じたものとなるようにスロットルアクチュエータ24を制御する。
【0019】
吸気管22には、スロットルコントロールバルブ23をバイパスするバイパス通路25が設けられている。バイパス通路25には、エンジン11のアイドル回転数を制御するためにスロットルコントロールバルブ23の全閉時の吸気量を制御するアイドルスピードコントロールバルブ(ISCバルブ)26が設けられている。スロットルコントロールバルブ23の全閉状態(アイドル状態)及びスロットル開度を検出するアイドルスイッチ付スロットル開度センサ27が設けられている。アイドルスイッチ付スロットル開度センサ27によって検出されたアイドル状態及びスロットル開度のそれぞれを示す信号は、ECU20に出力される。
【0020】
エンジン11には、エンジン回転数(エンジン回転速度)を検出するエンジン回転数センサ28が設けられている。エンジン回転数センサ28により検出されたエンジン回転数を示す信号は、ECU20に出力される。
車速センサ29は、車速に比例する自動変速機13の出力軸の回転数を検出する。車速センサ29により検出された車速を示す信号は、ECU20に出力される。
【0021】
シフトポジションセンサ30は、運転者が操作するシフトレバーの位置(シフトポジション)を検出する。シフトポジションセンサ30により検出されたシフトポジションを示す信号は、ECU20に出力される。
加速度センサ31は、車両の減速度(減速加速度)を検出する。加速度センサ31により検出された減速度を示す信号は、ECU20に出力される。
【0022】
ブレーキ操作量センサ32は、ブレーキ装置18の操作量を検出する。ブレーキ操作量センサ32により検出されたブレーキ装置18の操作量を示す信号は、ECU20に出力される。ステアリング舵角センサ33は、運転者により操作されるステアリングの舵角を検出する。ステアリング舵角センサ33により検出されたステアリングの舵角を示す信号は、ECU20に出力される。方向指示器スイッチ34は、運転者により操作され、方向指示器(図示せず)により指示される方向を特定するための操作が行われる。方向指示器により指示される方向を示す信号は、ECU20に出力される。
【0023】
運転モード設定スイッチ35は、運転者により操作され、運転モードを設定するための操作が行われる。運転者により、運転モード設定スイッチ35が操作されることで、スポーツ走行指向又は通常走行指向の運転モードが設定され、その設定された運転モードを示す信号がECU20に出力される。
【0024】
ECU20は、変速マップを有しており、スロットル開度、車速などに基づいて、自動変速機13の変速段を決定し、この決定された変速段を成立させるようにA/T油圧制御装置17を制御することができる。また、ECU20には、図1に示すフローチャートの制御ステップが記述されたプログラムが格納されている。
【0025】
ナビゲーション装置50は、自車両を所定の目的地に誘導することを基本的な機能としており、ECU60と、操作部51と、表示部52と、スピーカ53と、位置検出部54と、地図データベース55と、運転履歴記録部56とを備えている。ナビゲーション装置50のECU60は、ECU20と双方向の通信が可能である。
【0026】
ナビゲーション装置50は、運転者に車両の現在地周りの道路情報を知らせて、車両の目的地までの走行経路を誘導する。操作部51には、目的地などの指示データが入力される。表示部52には、現在地周辺の地図情報、現在位置、目的位置、経路などの情報が表示される。スピーカ53からは、案内音声が出力される。
【0027】
ECU60は、入力された情報に基づいて、ナビゲーション処理等の各種演算処理を行う。ECU60のROMには、目的地までの経路の検索、経路中の走行案内、特定区間の決定等を行うための各種プログラムが格納されている。
【0028】
位置検出部54は、GPSレシーバ、地磁気センサ、距離センサ、ビーコンセンサ、ジャイロセンサとを備えており、自車の位置を検出し、その検出した自車の位置を示すデータをECU60に出力する。
【0029】
地図データベース55には、車両の走行に必要な情報(地図、直線路、コーナ、登降坂、高速道路など)が記憶されている。地図データベース55は、地図データファイル、交差点データファイル、ノードデータファイル、道路データファイルを備えている。これら各ファイルには、経路探索を行うとともに、探索した経路に沿って案内図を表示するための各種データが格納されている。ECU60は、地図データベース55を参照して、必要な情報を読み出す。
【0030】
運転履歴記録部56には、車両が走行した走行路、及び車両が走行路を走行した日時などの情報が記録される。ECU60は、必要に応じて、運転履歴記録部56から運転履歴のデータを読み出す。
【0031】
ECU60は、操作部51から入力された目的地などの指示データ及び位置検出部54により検出された自車位置に基づいて、地図データベース55から必要な地図情報を検索し、その検索により得られた経路の情報を表示部52に表示させる。ECU60は、操作部51から入力された目的地などの指示データが入力されていない場合には、自車位置の周辺の道路情報を表示部52に表示する。
【0032】
ECU60は、コーナ検出部61を備えている。コーナ検出部61は、地図データベース55に格納されたデータに基づいて、先方の道路にコーナがあるか否かを検出する。
【0033】
車両には、カメラ71と、道路状況検出部72が設けられている。カメラ71は、車両の前方の道路状況を撮像する。道路状況検出部72は、カメラ71により撮像されたデータに基づいて、車両の前方の道路状況を検出する。道路状況検出部72による検出結果は、ECU20に出力される。
【0034】
上記のように、従来より、コーナに対する車両の減速制御が行われる場合、減速制御が行われて車速が低下し、車速が、コーナRに対応して設定された車速のしきい値以下まで低下したときに、そのコーナに対する減速制御が終了するようになっている。発明者らによる研究の結果、コーナRが大きいコーナに対して減速制御が行われた場合には、その車両の運転者に違和感(過剰減速感)を与えることが多いという新たな知見が得られた。その理由について以下に説明する。
【0035】
コーナに対する減速制御が行われる場合に、減速制御が終了(復帰)するときの車速のしきい値は、上記のようにコーナRに対応して設定される。この場合、上記車速のしきい値は、例えば下記の式3により求められる目標旋回車速Vreqとして設定されることがある。
【0036】
【数3】
ここで、旋回横G Gyは、車両がコーナを旋回するときの横Gの値(目標値)である。
【0037】
または、上記車速のしきい値は、上記式3により算出される代わりに、予め設定された、コーナRと旋回横Gを2変数とするマップ(コーナRと旋回横Gの2つの条件に応じた上記車速のしきい値が予め設定されているマップ)が参照されることにより、求められることができる。
【0038】
図2は、コーナR(コーナ旋回半径)と旋回横Gに基づいて、上記式3から求められる上記車速のしきい値(目標旋回車速Vreq)を示したものである。旋回横Gとしては、実際の減速制御において設定される可能性のある数値例として、0.25Gと0.35Gの2つの値が挙げられている。
【0039】
コーナ旋回半径[m]が20の場合、旋回横G[G]が0.25の場合の目標旋回車速Vreqは、7.0[m/s]=25.2[km/h]であり、一方、旋回横G[G]が0.35の場合の目標旋回車速Vreqは、8.3[m/s]=29.8[km/h]である。これに対して、コーナ旋回半径[m]が100の場合、旋回横G[G]が0.25の場合の目標旋回車速Vreqは、15.7[m/s]=56.3[km/h]であり、一方、旋回横G[G]が0.35の場合の目標旋回車速Vreqは、18.5[m/s]=66.7[km/h]である。
【0040】
上記のように、コーナ旋回半径[m]が20の場合、旋回横G[G]が0.25と0.35の場合の目標旋回車速Vreqの差は、4.6km/hであるのに対し、コーナ旋回半径[m]が100の場合には、旋回横G[G]が0.25と0.35の場合の目標旋回車速Vreqの差は、10.4km/hである。このことから、旋回横Gがある特定の値(コーナ旋回半径の大きさに関わらず、ある一定の値)に設定され、その旋回横Gに基づいて目標旋回車速Vreqが設定された場合、ヘアピンは誰が走行してもその目標旋回車速Vreqと実際の通過車速との差は小さい(自由度が小さい)のに対し、コーナRが大きい場合には、目標旋回車速Vreqと実際の通過車速との差が大きい(自由度が大きい)。
【0041】
このように、コーナRが大きい場合には、コーナRが小さい場合に比べて、ある特定の値に設定された旋回横Gに基づいて設定された目標旋回車速Vreqから離れた値(その目標旋回車速Vreqよりも相対的に大幅に高い車速)で走行することに対する自由度が大きい。このことから、コーナに対する減速制御が終了するときの車速のしきい値を、目標旋回車速Vreqとすると、特にコーナRが大きい場合には、運転者のフィーリングに合わず違和感を与える場合がある。以上のことから、コーナRが大きい場合には、コーナRが小さい場合に比べて、減速制御が終了するときの車速のしきい値は、目標旋回車速Vreqよりも相対的に大幅に高い車速に設定する方が運転者のフィーリングに合うという知見が得られた。
【0042】
図1及び図3を参照して、本実施形態の動作を説明する。
【0043】
[ステップS101]
ステップS101において、ナビゲーション装置50のECU60のコーナ検出部61は、位置検出部54と地図データベース55からのデータに基づいて、現在位置の前方にコーナがあるか否かを検出する。その判定の結果、肯定的に判定された場合にはステップS102に進み、そうでない場合には本制御フローはリターンされる。
【0044】
[ステップS102]
ステップS102において、ECU20は、自車の現在の車速V、コーナR、コーナまでの距離Lを求める。ECU20は、車速センサ29から入力したデータに基づいて、自車の現在の車速Vを求める。また、ECU20は、位置検出部54と地図データベース55からのデータに基づいて、コーナR、コーナまでの距離Lを求める。ステップS102の次にステップS103が行われる。
【0045】
[ステップS103]
ステップS103では、ECU20により、コーナの目標旋回車速Vreq及び目標減速度Greqが算出される。目標旋回車速Vreqの算出は、ECU20の減速制御終了判定しきい値算出部20aにより行われる。減速制御終了判定しきい値算出部20aは、上記ステップS2で求めたコーナRと、予め設定された旋回横Gに基づいて、上記式[数3]より、目標旋回車速Vreq[m/s]を求める。
【0046】
ECU20は、上記ステップS102で求めた自車速Vと、コーナまでの距離Lと、目標旋回車速Vreqに基づいて、下記式[数4]より、目標減速度Greqを求める。ステップS103の次に、ステップS104が行われる。
【数4】
【0047】
[ステップS104]
ステップS104において、ECU20の減速制御終了判定しきい値算出部20aは、予め格納された図4に示すマップを参照して、減速制御終了判定補正値Vaddを求める。図4に示すように、減速制御終了判定補正値Vaddは、コーナR(コーナ旋回半径)に基づいて求められる。図4及び図5に示すように、コーナRが小さいほど、減速制御終了判定補正値Vaddが小さくなるように設定されている。上述した、コーナRが大きい場合には、コーナRが小さい場合に比べて、減速制御が終了するときの車速のしきい値(減速制御終了判定しきい値Vtrg)は、目標旋回車速Vreqよりも相対的に大幅に高い車速に設定される方が運転者のフィーリングに合うという知見に基づくものである。ステップS104の次に、ステップS105が行われる。
【0048】
[ステップS105]
ステップS105において、ECU20は、運転者の減速意図が検出されたか否かを判定する。ステップS105において、運転者の減速意図とは、アクセルOFF(アクセルを緩める)、ブレーキON、マニュアルダウンシフト、方向指示器の操作、オーバードライブのOFFなどの減速のための操作により、エンジンブレーキを増加させたり、減速度を増加させる動作を意味している。方向指示器の操作に関しては、コーナがある分岐路へ経路を取ることの意思表示として、その分岐路方向への方向指示器の操作の有無が検出される。
【0049】
アクセルOFFの操作の有無は、スロットル開度センサ27からの信号に基づいて、アクセルがOFFの状態(全閉)か否かが判定されることができる。また、ブレーキONの操作の有無は、ブレーキ操作量センサ32からの信号に基づいて、判定されることができる。マニュアルダウンシフトの操作の有無は、シフトポジションセンサ30からの信号に基づいて判定されることができる。方向指示器の操作の有無は、方向指示器スイッチ34からの信号に基づいて判定されることができる。
【0050】
これらの判定の結果、運転者の減速意図が検出された場合(ステップS105−Y)には、ステップS106に進み、そうでない場合(ステップS105−N)には、本制御フローはリターンされる。なお、本例では、運転者の減速意図として、アクセルOFFが検出されることができる。
【0051】
なお、ステップS105においては、カメラ71により撮像されたデータに基づいて、道路状況検出部72が車両の前方の道路状況を検出し、その検出結果によって、ECU20は、ステップS105の判定結果として、異なる内容の判定をすることができる。
【0052】
即ち、道路状況検出部72の判定の結果、車両が前車(図示せず)に追いついたことを理由として、運転者の減速意図(減速操作)が検出されたと判定される場合には、ECU20により、ステップS105の判定結果は否定的なもの(ステップS105−N)とされることができる。
【0053】
[ステップS106]
ステップS106において、減速制御終了判定しきい値算出部20aは、上記ステップS103で求めた目標旋回車速Vreq及び、上記ステップS104で求めた減速制御終了判定補正値Vaddに基づいて、減速制御終了判定しきい値Vtrgを算出する。減速制御終了判定しきい値Vtrgは下記式により求められる。
Vtrg=Vreq+Vadd
ステップS106の次に、ステップS107が行われる。
【0054】
[ステップS107]
ステップS107において、ECU20により、現在の車速Vが上記ステップS106で求めた減速制御終了判定しきい値Vtrgよりも低いか否かが判定される。ステップS107では、車速Vが減速制御終了判定しきい値Vtrgに近づいたか否かが判定され、その判定の結果、否定的に判定された場合には、減速が不十分であるとして、ステップS108に進む。一方、その判定の結果、肯定的に判定された場合には、減速が十分にできたとして、本制御フローはリターンされる。
【0055】
[ステップS108]
ステップS108において、ECU20は、減速制御を実施する。ECU20は、上記ステップS103で求めた目標減速度Greqが車両に作用するように、エンジン11、油圧制御装置17及びブレーキ油圧制御装置19の少なくともいずれか一方を制御する。即ち、エンジン11のトルクダウン、自動変速機13のダウンシフト、ブレーキ装置18の作動、又は、自動変速機13及び自動変速機13の協調制御によって、車両に目標減速度Greqが作用するように制御する。ステップS108の次には、本制御フローはリターンされる。
【0056】
次に、図6を参照して、本実施形態の動作について説明する。
【0057】
時刻T1にてコーナに対する減速制御(ステップS108)が開始されると、車速が低下するとともに、減速度が増大する。時刻T2にて、車速が、減速制御終了判定しきい値Vtrg(=目標旋回車速Vreq+減速制御終了判定補正値Vadd)に達すると(ステップS107−Y)、減速制御が終了し、これにより、車速の低下が抑制されるとともに、減速度が零となる。
【0058】
本実施形態によれば、以下の効果が得られる。
【0059】
コーナRが小さい場合、目標旋回車速Vreqと実際の通過車速の差が小さく(自由度小)、コーナRが大きい場合には、目標旋回車速Vreqと実際の通過車速の差が大きい(自由度大)。このため、減速制御終了判定しきい値を目標旋回車速Vreqとすると、運転者のフィーリングに合わず、違和感を生じる場合がある。そこで、本実施形態では、減速制御終了判定しきい値VtrgをコーナRに応じて変更し、かつ、コーナRが小さいほど減速制御終了判定しきい値Vtrgを小さくすることで、違和感が発生する頻度及び程度を低減することができる。運転者の違和感の少ない旋回車速に制御することができる。
【0060】
本実施形態では、コーナRが大きい場合には、コーナRが小さい場合に比べて、減速制御終了判定補正値Vaddが大きな値に設定され、その結果、減速制御が終了するときの車速のしきい値である減速制御終了判定しきい値Vtrgが、目標旋回車速Vreqよりも相対的に大幅に高い車速に設定される。即ち、コーナRが大きいときには、より高い車速でコーナを走行することに対する自由度が大きいことを考慮して、より高い車速で減速制御が終了するように構成されている。このことから、本実施形態では、コーナRが大きい場合には、目標旋回車速Vreqからより高い車速の状態で、コーナに対する減速制御が終了(復帰)するように構成されている。よって、従来に比べて、運転者のフィーリングが向上する。
【0061】
(第2実施形態)
次に、図7及び図8を参照して、第2実施形態について説明する。
第2実施形態において、上記第1実施形態と同様の点については、同じ符号を付して、その詳細な説明を省略することとする。
【0062】
図7において、ステップS201〜ステップS207は、それぞれ図1のステップS101〜ステップS107と対応している。図7では、ステップS207にて、現在の車速Vが減速制御終了判定しきい値Vtrgよりも小さい値であると判定された場合(ステップS207−Y)には、減速度を漸次減少させる制御が開始される(ステップS209)。図8に示すように、時刻T4にて、車速が、減速制御終了判定しきい値Vtrg(=目標旋回車速Vreq+減速制御終了判定補正値Vadd)に達すると(ステップS207−Y)、減速度を漸減させる制御が行われる(ステップS209)。
【0063】
本実施形態によれば、減速制御が終了したとき(T4)の急激な減速度の抜け感やショックが抑制されるため、運転者のドライバビリティに優れる。
【0064】
(第3実施形態)
次に、図9から図13を参照して、第3実施形態について説明する。
第3実施形態において、上記実施形態と同様の点については、同じ符号を付して、その詳細な説明を省略することとする。
【0065】
第3実施形態は、上記第1及び第2実施形態を組み合わせたものである。
本実施形態では、図10及び図11のマップが参照されて、2段階の減速制御終了判定補正値Vadd1,2が求められる(図9のステップS304)。これにより、大きさの異なる2種類の減速制御終了判定しきい値Vtrg1(=目標旋回車速Vreq+減速制御終了判定補正値Vadd1)、及び減速制御終了判定しきい値Vtrg2(=目標旋回車速Vreq+減速制御終了判定補正値Vadd2)が設定される(ステップS306)。
【0066】
本例では、減速制御終了判定補正値Vadd1>減速制御終了判定補正値Vadd2である。また、本実施形態の減速制御終了判定補正値Vadd1が上記第1及び第2実施形態の減速制御終了判定補正値Vaddに相当し、減速制御終了判定補正値Vadd2は、その減速制御終了判定補正値Vadd1よりも小さな値に設定されている。
【0067】
図13に示すように、時刻T5にて、車速が減速制御終了判定しきい値Vtrg1よりも小さいか否かが判定され(ステップS307)、その判定の結果、否定的に判定されると(ステップS307−N)、減速制御が開始される(ステップS308)。これにより、車速が低下するとともに、減速度が増大する。その後、時刻T6にて、車速が減速制御終了判定しきい値Vtrg1よりも小さくなったことが検出されると(ステップS307−Y)、減速制御終了判定しきい値Vtrg2よりも小さくなったことが検出される前までは(ステップS309−N)、減速度の漸減制御が開始される(ステップS310)。その後、時刻T7にて、車速が、減速制御終了判定しきい値Vtrg2よりも小さくなったことが検出されると(ステップS309−Y)、減速制御が終了する。
【0068】
(第4実施形態)
上記実施形態では、旋回横Gがある特定の値(コーナRの大きさに関わらず、ある一定の値)に設定され、その旋回横Gに基づいて目標旋回車速Vreqが設定されることが前提とされ、コーナRの大きさによって減速制御終了判定補正値Vaddを変えていた。第4実施形態では、これに代えて、以下のような構成にすることができる。
【0069】
コーナRの大きさによって、旋回横G自身を変える(コーナRが大きいときには旋回横Gを相対的に大きくする)。即ち、コーナRによって値の異なる減速制御終了判定補正値Vaddを用いる代わりに、コーナRによって旋回横Gの値を変える。これにより、コーナRが大きいときには、従来の目標旋回車速Vreqよりも高い車速のしきい値となり、運転者のフィーリングに合う。現状では、減速が必要なコーナRの大きさを考えると、コーナRによらず、旋回横Gを一定の値にすることで問題ないが、高速コーナ(コーナRが大)になればなるほど、直線に近くなるので、旋回横Gを一定とする必要性は低下する。このことから、コーナRに基づいて旋回横Gを設定することには意義がある。
【図面の簡単な説明】
【0070】
【図1】本発明の車両の減速制御装置の第1実施形態の動作を示すフローチャートである。
【図2】本発明の車両の減速制御装置の第1実施形態において、コーナRと車速との関係を説明するための図である。
【図3】本発明の車両の減速制御装置の第1実施形態の概略構成図である。
【図4】本発明の車両の減速制御装置の第1実施形態の減速制御終了判定補正値を求めるマップである。
【図5】本発明の車両の減速制御装置の第1実施形態において、コーナRと減速制御終了判定補正値との関係を示すグラフである。
【図6】本発明の車両の減速制御装置の第1実施形態の動作を説明するためのタイムチャートである。
【図7】本発明の車両の減速制御装置の第2実施形態の動作を示すフローチャートである。
【図8】本発明の車両の減速制御装置の第2実施形態の動作を説明するためのタイムチャートである。
【図9】本発明の車両の減速制御装置の第3実施形態の動作を示すフローチャートである。
【図10】本発明の車両の減速制御装置の第3実施形態において、コーナRと減速制御終了判定補正値1との関係を示すグラフである。
【図11】本発明の車両の減速制御装置の第3実施形態において、コーナRと減速制御終了判定補正値2との関係を示すグラフである。
【図12】本発明の車両の減速制御装置の第3実施形態において、コーナRと減速制御終了判定補正値1,2との関係を示すグラフである。
【図13】本発明の車両の減速制御装置の第3実施形態の動作を説明するためのタイムチャートである。
【符号の説明】
【0071】
11 エンジン
13 自動変速機
17 A/T油圧制御装置
18 ブレーキ装置
19 ブレーキ油圧制御装置
20 ECU
21 アクセルポジションセンサ
27 スロットル開度センサ
28 エンジン回転数センサ
29 車速センサ
30 シフトポジションセンサ
31 加速度センサ
32 ブレーキ操作量センサ
33 ステアリング舵角センサ
34 方向指示器スイッチ
35 運転モード設定スイッチ
50 ナビゲーション装置
54 位置検出部
55 地図データベース
56 運転履歴記録部
60 ECU
61 コーナ検出部
71 カメラ
72 道路状況検出部
【特許請求の範囲】
【請求項1】
車両前方のコーナを検出する手段と、
車両の減速制御を行う手段と、
前記コーナの大きさと前記コーナを旋回するときの目標横加速度とに基づいて目標車速を求める手段と、
前記目標車速と実車速との差が所定範囲内であるときに前記減速制御を終了する手段とを備え、
前記所定範囲は、前記コーナの大きさに基づいて異なる値に設定される
ことを特徴とする車両の減速制御装置。
【請求項2】
請求項1記載の車両の減速制御装置において、
前記目標車速は、前記コーナの大きさと前記コーナを旋回するときの目標横加速度を2変数とするマップ、又は下記式1のいずれか一方により求められる
【数1】
ことを特徴とする車両の減速制御装置。
【請求項3】
請求項1または2に記載の車両の減速制御装置において、
前記所定範囲は、前記コーナの大きさが大きいときは、前記コーナの大きさが小さいときに比べて、大きな値に設定される
ことを特徴とする車両の減速制御装置。
【請求項4】
車両前方のコーナを検出する手段と、
車両の減速制御を行う手段とを備え、
前記コーナの大きさと前記コーナを旋回するときの目標横加速度を2変数とするマップ、又は下記式2のいずれか一方により目標車速を求める手段と、
前記目標車速と、前記コーナの大きさに基づいて設定された目標車速の補正値とに基づいて、前記減速制御の終了時期を判断する
【数2】
ことを特徴とする車両の減速制御装置。
【請求項5】
請求項4記載の車両の減速制御装置において、
前記補正値は、前記コーナの大きさが大きいときは、前記コーナの大きさが小さいときに比べて、大きな値に設定される
ことを特徴とする車両の減速制御装置。
【請求項6】
車両前方のコーナを検出する手段と、
目標車速に基づいて車両の減速制御を行う手段と、
前記コーナの大きさと前記コーナを旋回するときの目標横加速度とに基づいて前記目標車速を求める手段と
を備え、
前記目標横加速度は、前記コーナの大きさに基づいて異なる値に設定される
ことを特徴とする車両の減速制御装置。
【請求項1】
車両前方のコーナを検出する手段と、
車両の減速制御を行う手段と、
前記コーナの大きさと前記コーナを旋回するときの目標横加速度とに基づいて目標車速を求める手段と、
前記目標車速と実車速との差が所定範囲内であるときに前記減速制御を終了する手段とを備え、
前記所定範囲は、前記コーナの大きさに基づいて異なる値に設定される
ことを特徴とする車両の減速制御装置。
【請求項2】
請求項1記載の車両の減速制御装置において、
前記目標車速は、前記コーナの大きさと前記コーナを旋回するときの目標横加速度を2変数とするマップ、又は下記式1のいずれか一方により求められる
【数1】
ことを特徴とする車両の減速制御装置。
【請求項3】
請求項1または2に記載の車両の減速制御装置において、
前記所定範囲は、前記コーナの大きさが大きいときは、前記コーナの大きさが小さいときに比べて、大きな値に設定される
ことを特徴とする車両の減速制御装置。
【請求項4】
車両前方のコーナを検出する手段と、
車両の減速制御を行う手段とを備え、
前記コーナの大きさと前記コーナを旋回するときの目標横加速度を2変数とするマップ、又は下記式2のいずれか一方により目標車速を求める手段と、
前記目標車速と、前記コーナの大きさに基づいて設定された目標車速の補正値とに基づいて、前記減速制御の終了時期を判断する
【数2】
ことを特徴とする車両の減速制御装置。
【請求項5】
請求項4記載の車両の減速制御装置において、
前記補正値は、前記コーナの大きさが大きいときは、前記コーナの大きさが小さいときに比べて、大きな値に設定される
ことを特徴とする車両の減速制御装置。
【請求項6】
車両前方のコーナを検出する手段と、
目標車速に基づいて車両の減速制御を行う手段と、
前記コーナの大きさと前記コーナを旋回するときの目標横加速度とに基づいて前記目標車速を求める手段と
を備え、
前記目標横加速度は、前記コーナの大きさに基づいて異なる値に設定される
ことを特徴とする車両の減速制御装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2007−50794(P2007−50794A)
【公開日】平成19年3月1日(2007.3.1)
【国際特許分類】
【出願番号】特願2005−237900(P2005−237900)
【出願日】平成17年8月18日(2005.8.18)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成19年3月1日(2007.3.1)
【国際特許分類】
【出願日】平成17年8月18日(2005.8.18)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]