
車両の測位装置
【発明の詳細な説明】
【0001】
【産業上の利用分野】本発明は、自車の位置を求めて進路決定などのために用いられる、いわゆるナビゲーションシステムで好適に実施される車両の測位装置に関する。
【0002】
【従来の技術】地球周回軌道を回る複数の衛星からの信号を受信し、自車位置(経度、緯度、高度など)および走行速度などを計測するグローバルポジショニングシステム(略称、GPS)と称される技術が実用化されている。このGPSによる測位方法では、少なくとも4個(高度が判っているときには3個)の衛星からの信号を受信する必要がある。
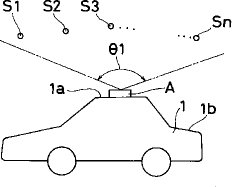
【0003】一方、図4で示されるように、衛星S1,S2,…,Snからの信号を受信するために、車体1に取付けられるアンテナは、この図4において参照符Aで示されるように、車体1の屋根1aやトランク1b上に取付けられる場合には、該アンテナAのほぼ全天方向にわたって開口しているので、見通し角θ1は大きく、測位に必要な前記少なくとも3個の衛星からの信号を受信することはできる。
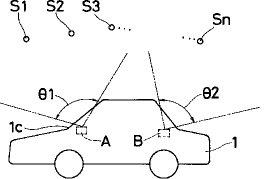
【0004】しかしながら、上述の図4で示されるようにアンテナAを車体1の外側に取付けるようにした構成では、車体形状の美観を損なってしまう。このため、アンテナAを車体1内に設けようとすると、図5で示されるように見通し角θ1は極めて狭くなってしまう。すなわち、車体1内に設ける場合には、鋼板などから成る車体1によって遮蔽されてしまうので、アンテナAを窓ガラス1cの近傍に設けたとしても、前記見通し角θ1が極めて狭くなってしまう。このため、受信できる衛星の数が少なくなってしまい、測位を行うことができない場合が生じる。このような不具合を防止するために、前記アンテナAとは離間して車体1内にもう1つのアンテナBが設けられて、従来から、受信条件の良好な方のアンテナAまたはBの受信結果を選択的に用いるいわゆるダイバシティ方式によって測位が行われている。
【0005】図6は、典型的な従来技術のダイバシティ方式の測位装置11の電気的構成を示すブロック図である。第1のアンテナAからの受信信号は、バンドパスフィルタ(略称、BPF)12に入力されて、衛星からの1.5GHzの信号成分が濾波された後、高周波増幅回路13から中間周波増幅回路14を介して切換回路15の一方の入力に入力される。また同様に、第2のアンテナBからの受信信号は、BPF16、高周波増幅回路17および中間周波増幅回路18を介して、前記切換回路15の他方の入力に入力される。切換回路15は、マイクロコンピュータなとで実現される後述する処理回路20からの切換制御信号に応答して、前記中間周波増幅回路14,18からの出力を選択的に導出する。
【0006】一方、前記アンテナA,Bにそれぞれ個別的に対応してデコーダ21,22が設けられており、切換回路15から出力された中間周波増幅回路14からの出力はデコーダ21に入力され、また中間周波増幅回路18からの出力はデコーダ22に入力される。
【0007】前記各衛星S1〜Snからは、位相と時間とを走査して搬送波を変調する、いわゆるスペクトラム拡散法によって作成された信号が送信されており、各衛星S1〜Sn毎に、前記走査する位相と時間とが相互に異なり、同一の搬送周波数が用いられる。したがってデコーダ21,22は、処理回路20に設けられているゴールドコード発生器との合成フィルタによって構成されており、このゴールドコードは衛星それぞれに独立した信号で、この合成フィルタによって各衛星S1〜Snからの信号を分離することができる。デコーダ21,22は、各衛星S1〜Snからの信号をいわゆるドップラー効果による位相のずれなどを補正した後、デジタルデータに復調し、前記処理回路20へ出力する。
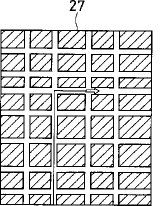
【0008】処理回路20は、デコーダ21または22で復調されたデータのうち、受信条件が良好な方のアンテナに対応したデコーダ21または22からのデータを選択して、経度、緯度、高度および車速などの測位演算を行う。その演算結果は、出力インタフェイス回路23を介して映像信号作成回路25に入力される。この映像信号作成回路25にはまた、コンパクトディスク中に記録されている地図データを読出す、いわゆるCD−ROMデコーダ26からの地図データが入力されている。この映像信号作成回路25は、地図画面上に、測位された自車位置を合成した図7で示されるような画像の映像信号を作成し、液晶表示装置などで実現される表示装置27へ出力し、画像表示を行わせる。これによって、運転者は地図上で自車の位置を確認し、走行経路の決定などを行うことができる。
【0009】
【発明が解決しようとする課題】上述の従来技術では、アンテナA,Bで受信された受信信号は、それぞれ個別にデコーダ21,22によって演算処理されるので、アンテナAまたはBの少なくともいずれか一方で同時に3つの衛星からの信号を受信しなければ、測位演算を行うことができない。したがって図5で示すように、たとえばアンテナAの見通し角θ1内にある衛星S1は、アンテナBの見通し角θ2内にはなく、このように各衛星S1〜Snからの信号は、アンテナAまたはBのいずれか一方でしか受信できない場合が生じてしまう。したがって、測位可能なように同時に3個の衛星からの信号を受信することができない場合があり、このような場合には、自車位置を検出するのに、最大でたとえば30分程度も要してしまうことがある。
【0010】なお、高周波増幅回路13,17からの出力を直接加算した後、以降の処理を行うようにした場合には、受信信号波形に歪みが生じ、各衛星S1〜Snからの信号データの復調ができなくなってしまう。
【0011】本発明の目的は、見通し角の小さいアンテナを用いたダイバシティ方式の受信であっても、速やかに自車位置を測位することができる車両の測位装置を提供することである。
【0012】
【課題を解決するための手段】本発明は、車体上で相互に離間して設けられ、測位用の衛星からの信号を受信する複数のアンテナと、前記各アンテナを予め定めた一定時間毎に選択的に切換えて各アンテナからの受信信号を導出する切換手段と、前記切換手段からの受信信号を演算処理して各アンテナで受信された1または複数の各衛星の情報を作成し記憶し、切換前のアンテナの各衛星の前記記憶された情報と切換後の他のアンテナからの各衛星の演算処理し作成された情報とを併せて自車の位置を求める演算手段を含むことを特徴とする車両の測位装置である。
【0013】
【作用】本発明に従えば、衛星からの信号をダイバシティ方式によって受信するために、車体上には相互に離間して複数のアンテナが設けられている。前記各アンテナからの受信信号は、切換手段で選択的に切換えられて演算手段に入力される。演算手段は、各アンテナからの受信信号を順次的に演算処理して、各アンテナで受信された各衛星の情報を作成し、この各アンテナ毎の各衛星の情報を相互に演算処理して自車の位置を求める。
【0014】したがって、たとえば第1のアンテナと第2のアンテナとの両方で同時に受信できない衛星であっても、いずれか一方のアンテナで受信されていれば測位演算に用いることができる。このため、高い確率で測位に必要な衛星からの信号を受信していることができる。これによって、自車位置の測定を短時間に行うことができるとともに、受信のための構成を簡略化することができる。
【0015】
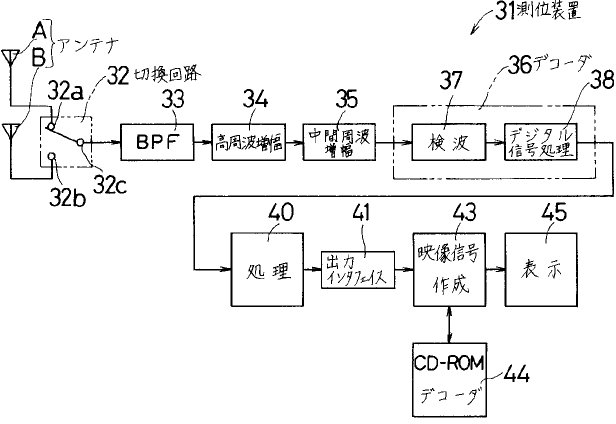
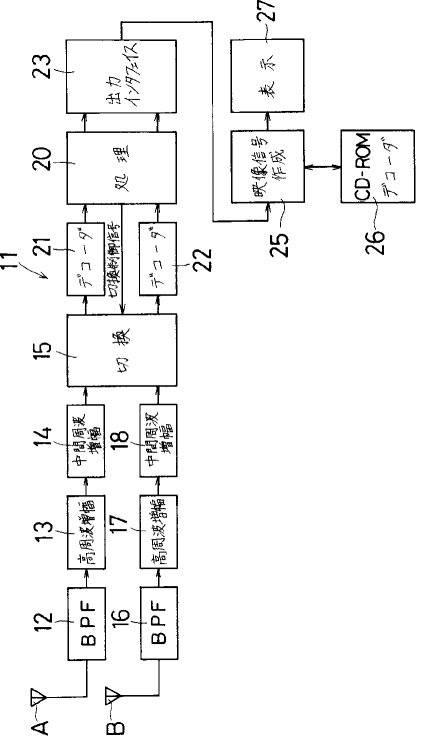
【実施例】図1は、本発明の一実施例の測位装置31の電気的構成を示すブロック図である。前記図5で示されるように、車体1の窓ガラス1c付近において、相互に離間して配置される2つのアンテナA,Bは、切換回路32の個別接点32a,32bにそれぞれ接続されている。切換回路32の共通接点32cから導出される前記アンテナAまたはBの受信信号は、BPF33で1.5GHz付近の前記衛星S1〜Snからの信号の搬送波帯域が■波された後、高周波増幅回路34および中間周波増幅回路35を介してデコーダ36に入力される。
【0016】デコーダ36は、受信信号をデジタル信号に復調する検波回路37と、前記デジタル信号を演算処理してドップラー効果による位相のずれなどを補正するデジタル信号処理回路38とを含んで構成されている。このデジタル信号処理回路38からの出力は、マイクロコンピュータなどで実現される処理回路40に入力される。
【0017】処理回路40は、後述するようにして自車位置の測位演算を行い、その演算結果を出力インタフェイス回路41を介して映像信号作成回路43へ出力する。前記映像信号作成回路43にはまた、CD−ROMデコーダ44から、コンパクトディスクに記録されている地図情報のうち、所望とする地域の地図情報が読出されて入力されている。この映像信号作成回路43は、前記図7で示されるように、前記地図情報に基づいて自車の走行地域の地図画面を作成し、その画面上に自車位置を表示した映像信号を作成し、液晶表示装置などで実現される表示装置45によって画像表示を行う。こうして運転者は、自車の走行地域付近の地理を認識し、自車の走行経路の決定などを行うことができる。
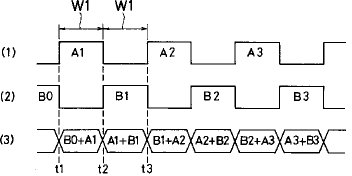
【0018】図2は、上述のように構成された測位装置31の動作を説明するためのタイミングチャートである。アンテナAは、切換回路32によって図2(1)で示されるように、たとえば1秒未満の予め定める時間W1毎に選択されて、参照符A1,A2,A3,…で示されるように、衛星S1〜Snからの信号を受信している。これに対してアンテナBは、図2(2)で示されるように、前記時間W1毎に前記アンテナAとは逆の周期で選択されて、参照符B0,B1,B2,…で示されるように、衛星S1〜Snからの信号を受信する。
【0019】これらの受信信号から処理回路40は、図2R>2(3)で示されるように、アンテナA,Bの最新の受信信号に基づいて、測位演算処理を行う。すなわち、時刻t1〜t2間は、時刻t1以前のアンテナBの受信信号B0と時刻t1〜t2間のアンテナAの受信信号A1とに基づいて測位演算処理を行い、時刻t2〜t3間は、アンテナAの受信信号A1とアンテナBの受信信号B1とに基づいて測位演算処理を行う。以降、同様の処理を繰返す。
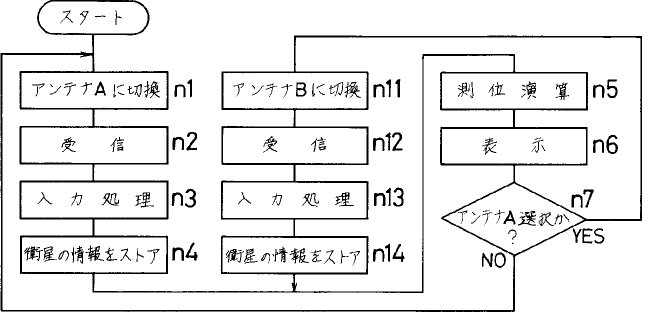
【0020】図3は、図2で示される動作を説明するたのフローチャートである。ステップn1では切換回路32においてアンテナAが選択され、ステップn2でそのアンテナAによって衛星S1〜Snからの信号が受信されると、ステップn3でその受信信号がデジタルデータに入力処理される。ステップn4では、そのデジタルデータが演算されて、アンテナAで受信された衛星の情報が求められ、ストアされる。
【0021】ステップn5では、アンテナAに関連して求められた衛星の情報と、アンテナBに関連して求められた衛星の情報とが相互に演算処理されて、自車の経度、緯度、高度および車速などの測位演算が行われ、ステップn6で、表示装置45によって表示される。なお、このような測位動作が開始された直後には、前記ステップn5での測位演算には、前記切換回路32が導通しているアンテナAまたはBのいずれかによって受信された信号に基づいて演算処理が行われ、2回目以降の演算処理には、両方のアンテナA,Bでの受信信号に基づいて演算処理が行われる。
【0022】したがってステップn7で、アンテナAが選択されているか否かが判断され、そうでないときには前記ステップn1に戻ってアンテナAが選択され、そうであるときにはステップn11に移って、アンテナBが選択される。ステップn11で切換回路32がアンテナB側に切換えられ、ステップn12で衛星からの信号が受信されると、ステップn13でデジタルデータに入力処理される。その後、前記ステップn4と同様にステップn14で、アンテナBで受信された衛星に関する情報が求められた後、ストアされて前記ステップn5に移り、アンテナAで受信された衛星に関する情報と演算処理が行われる。
【0023】このように本発明に従う測位装置31では、ダイバシティ受信用に2つのアンテナA,Bを設け、これらのアンテナで受信された受信信号を切換回路32によって選択的に切換えて、各アンテナA,Bによって受信された衛星に関する情報を、それぞれデジタル値に復調した後に相互に演算処理して測位演算を行うので、2つのアンテナA,Bを併せて少なくとも3個の衛星からの信号を受信できればよく、これによって衛星を捕捉する確率を高めて、短時間で自車位置を検出することが可能となる。
【0024】すなわちたとえば、各衛星S1〜Sn毎に対応して前記位相および時間を掃引して第1の衛星を検出すると、その第1の衛星からの受信信号によって受信可能な衛星を判別することができ、その受信可能な衛星に対応した位相および時間の変調度に前記櫛形フィルタを設定することによって、以降の第2および第3の衛星を速やかに検出することができる。たとえば第1の衛星の検出には30秒〜1分程度であり、測位に必要な3つ目の衛星を3分程度で検出できるようになる。これによって、従来技術と比較して格段に自車位置の検出時間を短縮することができる。
【0025】また、受信のための構成を2つのアンテナA,Bで時分割に使用して共用することによって、構成を簡略化することができる。
【0026】
【発明の効果】以上のように本発明によれば、各アンテナで受信された受信信号は、まず各衛星毎の情報に演算処理された後、この情報が相互に演算処理されて自車の位置が求められるので、少なくともいずれか1つのアンテナで受信可能な衛星からの信号を測位のために用いることができ、したがって高い確率で測位に必要な衛星からの信号を受信していることができ、短時間で測位することができる。
【0027】また、複数の各アンテナからの受信信号は、選択的に切換えられて演算手段に入力されるので、受信のための構成を簡略化することもできる。
【図面の簡単な説明】
【図1】本発明の一実施例の測位装置31の電気的構成を示すブロック図である。
【図2】測位動作を説明するためのタイミングチャートである。
【図3】図2のフローチャートである。
【図4】自動車の車体1に単一個のアンテナAを取付た状態を示す側面図である。
【図5】車体1にダイバシティ受信のために2つのアンテナA,Bを設けた状態を示す側面図である。
【図6】典型的な従来技術の測位装置11の電気的構成を示すブロック図である。
【図7】前記測位演算によって求められた自車位置を地図画面上に表示した表示装置27,45の表示例を示す図である。
【符号の説明】
1 車体
31 測位装置
32 切換回路
36 デコーダ
37 検波回路
38 デジタル信号処理回路
40 処理回路
43 映像信号作成回路
44 CD−ROMデコーダ
45 表示装置
A,B アンテナ
S1〜Sn 衛星
【0001】
【産業上の利用分野】本発明は、自車の位置を求めて進路決定などのために用いられる、いわゆるナビゲーションシステムで好適に実施される車両の測位装置に関する。
【0002】
【従来の技術】地球周回軌道を回る複数の衛星からの信号を受信し、自車位置(経度、緯度、高度など)および走行速度などを計測するグローバルポジショニングシステム(略称、GPS)と称される技術が実用化されている。このGPSによる測位方法では、少なくとも4個(高度が判っているときには3個)の衛星からの信号を受信する必要がある。
【0003】一方、図4で示されるように、衛星S1,S2,…,Snからの信号を受信するために、車体1に取付けられるアンテナは、この図4において参照符Aで示されるように、車体1の屋根1aやトランク1b上に取付けられる場合には、該アンテナAのほぼ全天方向にわたって開口しているので、見通し角θ1は大きく、測位に必要な前記少なくとも3個の衛星からの信号を受信することはできる。
【0004】しかしながら、上述の図4で示されるようにアンテナAを車体1の外側に取付けるようにした構成では、車体形状の美観を損なってしまう。このため、アンテナAを車体1内に設けようとすると、図5で示されるように見通し角θ1は極めて狭くなってしまう。すなわち、車体1内に設ける場合には、鋼板などから成る車体1によって遮蔽されてしまうので、アンテナAを窓ガラス1cの近傍に設けたとしても、前記見通し角θ1が極めて狭くなってしまう。このため、受信できる衛星の数が少なくなってしまい、測位を行うことができない場合が生じる。このような不具合を防止するために、前記アンテナAとは離間して車体1内にもう1つのアンテナBが設けられて、従来から、受信条件の良好な方のアンテナAまたはBの受信結果を選択的に用いるいわゆるダイバシティ方式によって測位が行われている。
【0005】図6は、典型的な従来技術のダイバシティ方式の測位装置11の電気的構成を示すブロック図である。第1のアンテナAからの受信信号は、バンドパスフィルタ(略称、BPF)12に入力されて、衛星からの1.5GHzの信号成分が濾波された後、高周波増幅回路13から中間周波増幅回路14を介して切換回路15の一方の入力に入力される。また同様に、第2のアンテナBからの受信信号は、BPF16、高周波増幅回路17および中間周波増幅回路18を介して、前記切換回路15の他方の入力に入力される。切換回路15は、マイクロコンピュータなとで実現される後述する処理回路20からの切換制御信号に応答して、前記中間周波増幅回路14,18からの出力を選択的に導出する。
【0006】一方、前記アンテナA,Bにそれぞれ個別的に対応してデコーダ21,22が設けられており、切換回路15から出力された中間周波増幅回路14からの出力はデコーダ21に入力され、また中間周波増幅回路18からの出力はデコーダ22に入力される。
【0007】前記各衛星S1〜Snからは、位相と時間とを走査して搬送波を変調する、いわゆるスペクトラム拡散法によって作成された信号が送信されており、各衛星S1〜Sn毎に、前記走査する位相と時間とが相互に異なり、同一の搬送周波数が用いられる。したがってデコーダ21,22は、処理回路20に設けられているゴールドコード発生器との合成フィルタによって構成されており、このゴールドコードは衛星それぞれに独立した信号で、この合成フィルタによって各衛星S1〜Snからの信号を分離することができる。デコーダ21,22は、各衛星S1〜Snからの信号をいわゆるドップラー効果による位相のずれなどを補正した後、デジタルデータに復調し、前記処理回路20へ出力する。
【0008】処理回路20は、デコーダ21または22で復調されたデータのうち、受信条件が良好な方のアンテナに対応したデコーダ21または22からのデータを選択して、経度、緯度、高度および車速などの測位演算を行う。その演算結果は、出力インタフェイス回路23を介して映像信号作成回路25に入力される。この映像信号作成回路25にはまた、コンパクトディスク中に記録されている地図データを読出す、いわゆるCD−ROMデコーダ26からの地図データが入力されている。この映像信号作成回路25は、地図画面上に、測位された自車位置を合成した図7で示されるような画像の映像信号を作成し、液晶表示装置などで実現される表示装置27へ出力し、画像表示を行わせる。これによって、運転者は地図上で自車の位置を確認し、走行経路の決定などを行うことができる。
【0009】
【発明が解決しようとする課題】上述の従来技術では、アンテナA,Bで受信された受信信号は、それぞれ個別にデコーダ21,22によって演算処理されるので、アンテナAまたはBの少なくともいずれか一方で同時に3つの衛星からの信号を受信しなければ、測位演算を行うことができない。したがって図5で示すように、たとえばアンテナAの見通し角θ1内にある衛星S1は、アンテナBの見通し角θ2内にはなく、このように各衛星S1〜Snからの信号は、アンテナAまたはBのいずれか一方でしか受信できない場合が生じてしまう。したがって、測位可能なように同時に3個の衛星からの信号を受信することができない場合があり、このような場合には、自車位置を検出するのに、最大でたとえば30分程度も要してしまうことがある。
【0010】なお、高周波増幅回路13,17からの出力を直接加算した後、以降の処理を行うようにした場合には、受信信号波形に歪みが生じ、各衛星S1〜Snからの信号データの復調ができなくなってしまう。
【0011】本発明の目的は、見通し角の小さいアンテナを用いたダイバシティ方式の受信であっても、速やかに自車位置を測位することができる車両の測位装置を提供することである。
【0012】
【課題を解決するための手段】本発明は、車体上で相互に離間して設けられ、測位用の衛星からの信号を受信する複数のアンテナと、前記各アンテナを予め定めた一定時間毎に選択的に切換えて各アンテナからの受信信号を導出する切換手段と、前記切換手段からの受信信号を演算処理して各アンテナで受信された1または複数の各衛星の情報を作成し記憶し、切換前のアンテナの各衛星の前記記憶された情報と切換後の他のアンテナからの各衛星の演算処理し作成された情報とを併せて自車の位置を求める演算手段を含むことを特徴とする車両の測位装置である。
【0013】
【作用】本発明に従えば、衛星からの信号をダイバシティ方式によって受信するために、車体上には相互に離間して複数のアンテナが設けられている。前記各アンテナからの受信信号は、切換手段で選択的に切換えられて演算手段に入力される。演算手段は、各アンテナからの受信信号を順次的に演算処理して、各アンテナで受信された各衛星の情報を作成し、この各アンテナ毎の各衛星の情報を相互に演算処理して自車の位置を求める。
【0014】したがって、たとえば第1のアンテナと第2のアンテナとの両方で同時に受信できない衛星であっても、いずれか一方のアンテナで受信されていれば測位演算に用いることができる。このため、高い確率で測位に必要な衛星からの信号を受信していることができる。これによって、自車位置の測定を短時間に行うことができるとともに、受信のための構成を簡略化することができる。
【0015】
【実施例】図1は、本発明の一実施例の測位装置31の電気的構成を示すブロック図である。前記図5で示されるように、車体1の窓ガラス1c付近において、相互に離間して配置される2つのアンテナA,Bは、切換回路32の個別接点32a,32bにそれぞれ接続されている。切換回路32の共通接点32cから導出される前記アンテナAまたはBの受信信号は、BPF33で1.5GHz付近の前記衛星S1〜Snからの信号の搬送波帯域が■波された後、高周波増幅回路34および中間周波増幅回路35を介してデコーダ36に入力される。
【0016】デコーダ36は、受信信号をデジタル信号に復調する検波回路37と、前記デジタル信号を演算処理してドップラー効果による位相のずれなどを補正するデジタル信号処理回路38とを含んで構成されている。このデジタル信号処理回路38からの出力は、マイクロコンピュータなどで実現される処理回路40に入力される。
【0017】処理回路40は、後述するようにして自車位置の測位演算を行い、その演算結果を出力インタフェイス回路41を介して映像信号作成回路43へ出力する。前記映像信号作成回路43にはまた、CD−ROMデコーダ44から、コンパクトディスクに記録されている地図情報のうち、所望とする地域の地図情報が読出されて入力されている。この映像信号作成回路43は、前記図7で示されるように、前記地図情報に基づいて自車の走行地域の地図画面を作成し、その画面上に自車位置を表示した映像信号を作成し、液晶表示装置などで実現される表示装置45によって画像表示を行う。こうして運転者は、自車の走行地域付近の地理を認識し、自車の走行経路の決定などを行うことができる。
【0018】図2は、上述のように構成された測位装置31の動作を説明するためのタイミングチャートである。アンテナAは、切換回路32によって図2(1)で示されるように、たとえば1秒未満の予め定める時間W1毎に選択されて、参照符A1,A2,A3,…で示されるように、衛星S1〜Snからの信号を受信している。これに対してアンテナBは、図2(2)で示されるように、前記時間W1毎に前記アンテナAとは逆の周期で選択されて、参照符B0,B1,B2,…で示されるように、衛星S1〜Snからの信号を受信する。
【0019】これらの受信信号から処理回路40は、図2R>2(3)で示されるように、アンテナA,Bの最新の受信信号に基づいて、測位演算処理を行う。すなわち、時刻t1〜t2間は、時刻t1以前のアンテナBの受信信号B0と時刻t1〜t2間のアンテナAの受信信号A1とに基づいて測位演算処理を行い、時刻t2〜t3間は、アンテナAの受信信号A1とアンテナBの受信信号B1とに基づいて測位演算処理を行う。以降、同様の処理を繰返す。
【0020】図3は、図2で示される動作を説明するたのフローチャートである。ステップn1では切換回路32においてアンテナAが選択され、ステップn2でそのアンテナAによって衛星S1〜Snからの信号が受信されると、ステップn3でその受信信号がデジタルデータに入力処理される。ステップn4では、そのデジタルデータが演算されて、アンテナAで受信された衛星の情報が求められ、ストアされる。
【0021】ステップn5では、アンテナAに関連して求められた衛星の情報と、アンテナBに関連して求められた衛星の情報とが相互に演算処理されて、自車の経度、緯度、高度および車速などの測位演算が行われ、ステップn6で、表示装置45によって表示される。なお、このような測位動作が開始された直後には、前記ステップn5での測位演算には、前記切換回路32が導通しているアンテナAまたはBのいずれかによって受信された信号に基づいて演算処理が行われ、2回目以降の演算処理には、両方のアンテナA,Bでの受信信号に基づいて演算処理が行われる。
【0022】したがってステップn7で、アンテナAが選択されているか否かが判断され、そうでないときには前記ステップn1に戻ってアンテナAが選択され、そうであるときにはステップn11に移って、アンテナBが選択される。ステップn11で切換回路32がアンテナB側に切換えられ、ステップn12で衛星からの信号が受信されると、ステップn13でデジタルデータに入力処理される。その後、前記ステップn4と同様にステップn14で、アンテナBで受信された衛星に関する情報が求められた後、ストアされて前記ステップn5に移り、アンテナAで受信された衛星に関する情報と演算処理が行われる。
【0023】このように本発明に従う測位装置31では、ダイバシティ受信用に2つのアンテナA,Bを設け、これらのアンテナで受信された受信信号を切換回路32によって選択的に切換えて、各アンテナA,Bによって受信された衛星に関する情報を、それぞれデジタル値に復調した後に相互に演算処理して測位演算を行うので、2つのアンテナA,Bを併せて少なくとも3個の衛星からの信号を受信できればよく、これによって衛星を捕捉する確率を高めて、短時間で自車位置を検出することが可能となる。
【0024】すなわちたとえば、各衛星S1〜Sn毎に対応して前記位相および時間を掃引して第1の衛星を検出すると、その第1の衛星からの受信信号によって受信可能な衛星を判別することができ、その受信可能な衛星に対応した位相および時間の変調度に前記櫛形フィルタを設定することによって、以降の第2および第3の衛星を速やかに検出することができる。たとえば第1の衛星の検出には30秒〜1分程度であり、測位に必要な3つ目の衛星を3分程度で検出できるようになる。これによって、従来技術と比較して格段に自車位置の検出時間を短縮することができる。
【0025】また、受信のための構成を2つのアンテナA,Bで時分割に使用して共用することによって、構成を簡略化することができる。
【0026】
【発明の効果】以上のように本発明によれば、各アンテナで受信された受信信号は、まず各衛星毎の情報に演算処理された後、この情報が相互に演算処理されて自車の位置が求められるので、少なくともいずれか1つのアンテナで受信可能な衛星からの信号を測位のために用いることができ、したがって高い確率で測位に必要な衛星からの信号を受信していることができ、短時間で測位することができる。
【0027】また、複数の各アンテナからの受信信号は、選択的に切換えられて演算手段に入力されるので、受信のための構成を簡略化することもできる。
【図面の簡単な説明】
【図1】本発明の一実施例の測位装置31の電気的構成を示すブロック図である。
【図2】測位動作を説明するためのタイミングチャートである。
【図3】図2のフローチャートである。
【図4】自動車の車体1に単一個のアンテナAを取付た状態を示す側面図である。
【図5】車体1にダイバシティ受信のために2つのアンテナA,Bを設けた状態を示す側面図である。
【図6】典型的な従来技術の測位装置11の電気的構成を示すブロック図である。
【図7】前記測位演算によって求められた自車位置を地図画面上に表示した表示装置27,45の表示例を示す図である。
【符号の説明】
1 車体
31 測位装置
32 切換回路
36 デコーダ
37 検波回路
38 デジタル信号処理回路
40 処理回路
43 映像信号作成回路
44 CD−ROMデコーダ
45 表示装置
A,B アンテナ
S1〜Sn 衛星
【特許請求の範囲】
【請求項1】 車体上で相互に離間して設けられ、測位用の衛星からの信号を受信する複数のアンテナと、前記各アンテナを予め定めた一定時間毎に選択的に切換えて各アンテナからの受信信号を導出する切換手段と、前記切換手段からの受信信号を演算処理して各アンテナで受信された1または複数の各衛星の情報を作成し記憶し、切換前のアンテナの各衛星の前記記憶された情報と切換後の他のアンテナからの各衛星の演算処理し作成された情報とを併せて自車の位置を求める演算手段を含むことを特徴とする車両の測位装置。
【請求項1】 車体上で相互に離間して設けられ、測位用の衛星からの信号を受信する複数のアンテナと、前記各アンテナを予め定めた一定時間毎に選択的に切換えて各アンテナからの受信信号を導出する切換手段と、前記切換手段からの受信信号を演算処理して各アンテナで受信された1または複数の各衛星の情報を作成し記憶し、切換前のアンテナの各衛星の前記記憶された情報と切換後の他のアンテナからの各衛星の演算処理し作成された情報とを併せて自車の位置を求める演算手段を含むことを特徴とする車両の測位装置。
【図2】


【図4】
【図1】
【図5】
【図7】
【図3】
【図6】
【図4】
【図1】
【図5】
【図7】
【図3】
【図6】
【特許番号】第2901804号
【登録日】平成11年(1999)3月19日
【発行日】平成11年(1999)6月7日
【国際特許分類】
【出願番号】特願平4−108197
【出願日】平成4年(1992)4月28日
【公開番号】特開平5−302972
【公開日】平成5年(1993)11月16日
【審査請求日】平成8年(1996)4月2日
【出願人】(000237592)富士通テン株式会社 (3,383)
【参考文献】
【文献】特開 平1−314982(JP,A)
【登録日】平成11年(1999)3月19日
【発行日】平成11年(1999)6月7日
【国際特許分類】
【出願日】平成4年(1992)4月28日
【公開番号】特開平5−302972
【公開日】平成5年(1993)11月16日
【審査請求日】平成8年(1996)4月2日
【出願人】(000237592)富士通テン株式会社 (3,383)
【参考文献】
【文献】特開 平1−314982(JP,A)
[ Back to top ]