
車両の直進判別装置
【課題】 どのような走行状態においても車輪速データのみから直進走行であることを正確に判定する。
【解決手段】 左右車輪速センサ11,12の検出値より車輪速演算手段13が演算した左右の車輪速値に基づき、予め設定されたチェックポイント(CP)毎に車輪速比演算手段21、距離演算手段31及び距離比演算手段32が夫々左右車輪速比および実走距離、直線距離および両者の距離比を演算する。車輪速比変動幅評価手段24が車輪速比の変動幅が比較的小さい時点のCPを有効CPとして抽出し、判定手段43が有効CPのうち、距離比が最小となる有効CPを直進状態にあると判定する。
【解決手段】 左右車輪速センサ11,12の検出値より車輪速演算手段13が演算した左右の車輪速値に基づき、予め設定されたチェックポイント(CP)毎に車輪速比演算手段21、距離演算手段31及び距離比演算手段32が夫々左右車輪速比および実走距離、直線距離および両者の距離比を演算する。車輪速比変動幅評価手段24が車輪速比の変動幅が比較的小さい時点のCPを有効CPとして抽出し、判定手段43が有効CPのうち、距離比が最小となる有効CPを直進状態にあると判定する。
【発明の詳細な説明】
【0001】
【発明の属する技術分野】本発明は、車両の走行状態が直進であるか否かを判別する装置に関するもので、例えば、左右車輪の回転数差を利用した動荷重半径方式のタイヤ空気圧警報装置に用いて好適である。
【0002】
【従来の技術および発明が解決しようとする課題】従来より、車両走行中のタイヤの転がり半径がタイヤ内の空気圧に比例することを利用して、各輪のタイヤの転がり半径、具体的には左右輪の回転数差によりタイヤ空気圧の低下を検出し警報を出力する動荷重半径方式のタイヤ空気圧警報装置がある。この場合、左右輪が共に空気圧の低下がなく適正な圧力状態であっても、車両の旋回中では車体の左右輪において旋回半径が異なり、旋回外輪は旋回内輪よりも旋回半径が大きいため、旋回外輪の車輪の車速が旋回内輪よりも大きくなったり、さらには、車両の旋回時の荷重移動により旋回外側の車輪半径の方が旋回内側の車輪半径よりも小さくなる。このため、正しいタイヤ空気圧を検出することができない。したがって、車両が直進走行中か否かを判別し、直進中の測定値に基づいて空気圧低下を判断する技術が知られている。
【0003】例えば、空気圧判定に適当でない車両の旋回状態をステアリングセンサによって検出するもの(特開平7−172121号公報)や、左右車輪速比の所定時間内の平均値を基準とし、これからある差分が生じた場合は旋回中であると判定するもの(特開平8−282222号公報)等がある。しかし、前者は車輪速センサ以外にステアリングセンサや、場合によっては横Gセンサ、ヨーレートセンサなども必要となるためコストが高くなるという問題がある。また、後者は、例えば一定方向の旋回と直進とが繰り返されるオーバルコースなどで端的に現れるように、平均値そのものが適切な値、すなわち直進走行時の平均値ではなく、直進走行時と旋回走行時との中間状態を表わす値となってしまい、これを基準値として直進判定を行うと、意図した効果が得られないという問題がある。
【0004】本発明は上記点に鑑みて、車輪速データのみから直進走行であることを正確に判定することを目的とする。
【0005】
【課題を解決するための手段】上記目的を達成するため、請求項1に記載の発明は、車両の左右の車輪速度を検出する車輪速検出手段と、前記検出された車輪速度に基づき2点間の前記車両が実際に走行した実走距離および前記2点間の直線距離を演算する距離演算手段と、前記演算された実走距離と直線距離とを比較し距離比較値を演算する距離比較演算手段と、前記距離比較値に基づき直進走行か否かを判定する判定手段と、、を具備することを特徴とする。
【0006】この発明によれば、検出された車両の左右の車輪速度より算出した車両走行に伴う車両の2点間の実走距離および直線距離の比較結果である距離比較値に基づいて、車両走行が直進走行か否かを判定する、すなわち前記距離比較値が実走距離と直線距離とが等しいことを表わす値またはその近傍値であれば直進走行とみなせるので、車輪速センサにより検出された車輪速データのみから直進走行であることを正確に判定することができる。
【0007】なお、上記距離比較値は、実走距離と直線距離との大小関係を表わす値であれば何でもよく、例えば、実走距離と直線距離との距離比であれば、その距離比は直進走行時には1または1に近い値となり、また、実走距離と直線距離との距離差(あるいは距離差の絶対値)であれば、その距離差は直進走行時には0または0に近い値となる。
【0008】また、請求項2に記載の発明は、車両の左右の車輪速度を検出する車輪速検出手段と、前記検出された車輪速度より左右の車輪速度の間の車輪速相対量を算出する車輪速相対量演算手段と、前記算出された車輪速相対量に基づき直進か否かを判定する点を決定するための有効チェックポイントを検出するチェックポイント検出手段と、前記検出された車輪速度に基づき2点間の前記車両が実際に走行した実走距離および前記2点間の直線距離を演算する距離演算手段と、前記演算された実走距離と直線距離とを比較し距離比較値を演算する距離比較演算手段と、前記距離比較値と前記検出された有効チェックポイントとに基づき直進走行か否かを判定する判定手段と、を具備することを特徴とする。
【0009】この発明によれば、車両の左右の車輪速度の間の車輪速相対量に基づいて直進走行および旋回走行の変化点に相当する可能性のある有効チェックポイントを検出するとともに、車輪速度より車両の実走距離と直線距離との間の距離比較値を演算し、有効チェックポイント毎の距離比較値によって直進走行か否かを判定するものであるので、車輪速を検出するセンサのみで時系列的に検出される有効チェックポイント毎に、直進走行時には実走距離と直線距離とが等しいことを表わす値またはその近傍値となる距離比較値により、直進走行か否かを正確に判別することができる。
【0010】なお、上記車輪速相対量は、上述した距離比較値と同様、左右の車輪速度の大小関係を表わす値であれば何でもよく、例えば、左右の車輪速度の比である速度比でも、あるいは、左右の車輪速度の差である速度差(または速度差の絶対値)でもよい。
【0011】上記実走距離は、請求項3に記載のように、前記距離演算手段によって、演算開始時点から前記車輪速度を積算することにより演算することができる。
【0012】また、上記直線距離は、請求項4に記載のように、前記距離演算手段により、演算開始時点を始点とし該始点から現時点までの直線距離として演算することができる。
【0013】さらにまた、上記直線距離は、請求項5に記載のように、前記距離演算手段によって、前記有効チェックポイントを始点とし演算周期毎に前記始点からの直線距離として演算することができる。
【0014】請求項6に記載の発明は、前記距離演算手段は、前記車両の輪距と前記左右の車輪速度とにより前記車両の旋回角を算出すると共に、前記旋回角の前記始点からの累積値と前記車輪速度とに基づき現時点の座標を演算し、該座標より前記直線距離を演算することを特徴とする。
【0015】この発明によれば、2点間の直線距離を、車両の旋回角の始点からの累積値と左右の車輪速度とから現在地点の座標を求め、前記始点と現在地点との2点間の直線距離として演算することができる。なお、車両の旋回角の累積値は車両の輪距と左右の車輪速度とから演算できる。したがって、センサとして車輪速検出手段のみから直線距離を得ることができる。
【0016】上記距離比較値を、請求項7に記載のように、前記距離比演算手段によって、前記有効チェックポイントを前記2点の一方の時点とするとともに、前記2つの有効チェックポイント間の実走距離と直線距離との比として演算することができる。
【0017】上記チェックポイント検出手段が検出する有効チェックポイントは、請求項8に記載のように、前記車輪速相対量とチェックポイント用閾値とを比較することにより検出するようにしても、請求項10に記載のように、前記車輪速相対量の変動幅とチェックポイント用閾値とを比較することにより検出するようにしてもよい。
【0018】この場合、車輪速相対量と比較するチェックポイント用閾値および車輪速相対量の変動幅と比較するチェックポイント用閾値はそれぞれ、比較対象の物理量の大きさを考慮して予め設定されるものである。
【0019】また、前記チェックポイント検出手段による有効チェックポイントの検出は、請求項9に記載のように、前記車輪速相対量が前記チェックポイント用閾値より小さい値から大きい値へと変化したとき、または、前記車輪速相対量が前記チェックポイント用閾値より大きい値から小さい値へと変化したときのいずれかの場合に行うようにしてもよい。
【0020】さらに、この有効チェックポイントは、請求項12に記載のように予め設定されたチェックポイントのうち前記車輪速相対量の変動幅の大きさに基づいて所定のチェックポイントを抽出することにより検出するようにしてもよい。この場合、例えば車両の走行中一定時間毎、あるいは一定距離走行毎に予めチェックポイントを発生し、その中から車輪速相対量の変動幅の大きさに応じて、例えば請求項13に記載のように変動幅の大きさが所定範囲内にあるチェックポイントを抽出して有効チェックポイントとして検出することができる。
【0021】そして、上記判定手段が行う直進走行か否かの判定は、請求項11に記載のように、前記距離比較値と直進判定用閾値とを比較することにより行ってもよいし、また、請求項14に記載のように、前記有効チェックポイントにおける前記距離比較値のうち、前記実走距離と直線距離との差が最も小さいときの値となる有効チェックポイントで直進走行であると判定することによって行ってもよい。なお、ここで距離比較値が実走距離と直線距離との差が最も小さい値となるとは、上述した距離比較値が距離比の場合には、距離比が1に最も近い値となることであり、距離比較値が距離差の場合には、距離差が0に最も近い値となることである。
【0022】請求項15に記載の発明は、前記判定手段が、前記直進走行であると判定したときの車輪速相対量を直進状態判別基準値に設定し、該直進状態判別基準値の設定時点以降の前記予め設定されたチェックポイントにおける車輪速相対量が前記直進状態判別基準値の近傍値である場合に直進状態であると判定する直進走行データ選別手段を更に有することを特徴とする。
【0023】この発明によれば、判定手段が予め設定したチェックポイントのうち、車輪速相対量の変動が比較的小さく、かつ、距離比較値が、実走距離と直線距離との差が最も小さいときの値となる時点を有効チェックポイントと定め、その有効チェックポイントでの車輪速相対量を直進状態判別基準値とし、それ以降は予め設定したチェックポイントにおける車輪速相対量が上記直進状態判別基準値の近傍の値であるときに直進と判定するようにしたので、簡便なシステムで正確な直進判別を継続することができる。
【0024】
【発明の実施の形態】本発明の各実施の形態を、図面を用いて詳細に説明する。
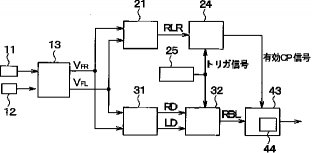
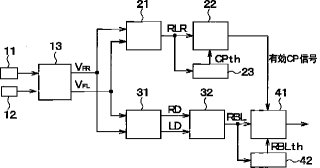
【0025】(第1実施形態)図1は、本第1実施形態の機能ブロックを示す図である。駆動輪である前右輪および前左輪の各々の回転速度を検出する右車輪速センサ11および左車輪速センサ12からの5ms毎の信号は、車輪速演算手段13に入力される。車輪速演算手段13は、各センサ信号の1秒間の、すなわち200個のデータの平均値VFR、VFLを1秒毎に算出し出力する。本発明において左右の車輪速度とは、左右の駆動輪であっても、左右の従動輪であっても、言い換えれば、左右の前輪であっても、左右の後輪であっても、いずれの場合でも直進判別でき、判別結果に変わりはない。以降の説明では、上記平均値VFR、VFLをそれぞれ、右車輪速および左車輪速、または単に車輪速と称する。また、以下で説明する各手段での演算周期Δtは上記車輪速の平均化処理の周期であり、例えば1秒間である。センサ信号の出力周期および各演算手段の演算周期は共に、必要に応じ任意に設定することができる。
【0026】車輪速VFR、VFLは、車輪速相対量演算手段としての車輪速比演算手段21に入力され、車輪速比演算手段21は車輪速比RLR=VFR/VFLを演算し出力する。また、車輪速VFR、VFLは、距離演算手段31に入力され、距離演算手段31は後述する方法によって、車両の演算開始時点の位置から現在位置までの実際に走行した距離である実走距離RDと、演算開始時点の位置と現在位置との間の直線距離LDとを演算し出力する。なお、車輪速相対量は左右の車輪速度の大小関係を表わすものであれば、両者の差でも両者の比でも何れでもよい。すなわち、差の場合はその値が0に近いほど、また、比の場合はその値が1に近いほど、それぞれ直進状態に近いことを示している。そして、後述する各種閾値も、相対量が差の値か比の値かに応じて適宜与えられる。本実施形態では、車輪速比を車輪速相対量としている。
【0027】演算された車輪速比RLRはチェックポイント検出手段22に入力される。チェックポイントとは、車両が直進状態であるか否かを判定する時点を決めるもので、複数のチェックポイントがある場合にその中で特に上記判定を行う時点を有効チェックポイントと称する。以下では、チェックポイントをCPと記す。CP検出手段22は、CP閾値設定手段23から出力されるCP検出閾値CPthと左右車輪速比RLRとを比較し、その結果に応じて前記有効CPを決定し有効CP信号を出力する。
【0028】一方、算出された実走距離RD及び直線距離LDは、距離比較演算手段としての距離比演算手段32に入力される。距離比演算手段32は、演算周期Δtで実走距離RDと直線距離LDとの距離比RBL=RD/LDを演算し、距離比較値として出力する。なお、距離比較値は、実走距離と直線距離との大小関係をあらわすものであれば、両者の比であっても両者の差であっても何れでもよい。すなわち、距離比の場合はその値が1に近いほど、また、距離差の場合はその値が0に近いほど、それぞれ直進状態に近いことを示している。本実施形態では、距離比を距離比較値としている。
【0029】判定手段41は、CP検出手段22からの有効CP信号および直進判定閾値設定手段42からの直進判定閾値RBLthと距離比演算手段32からの距離比RBLとを入力し、有効CPにおける距離比RBLが直進判別閾値RBLth以下である場合に、実走距離RDと直線距離LDとの差が小さい直進状態と判定し直進信号を出力する。
【0030】上記車輪速演算手段13、車輪速比演算手段21、CP検出手段22、CP閾値設定手段23、距離演算手段31、距離比演算手段32、判定手段41および直進判定閾値設定手段42は、図示しない車載されたコントローラ内のCPUでコンピュータプログラムが実行されることにより各機能が実現されている。その動作をフローチャートに基づき説明する。図2は本第1実施形態の車両の直進判別装置のメインフローを示す図である。
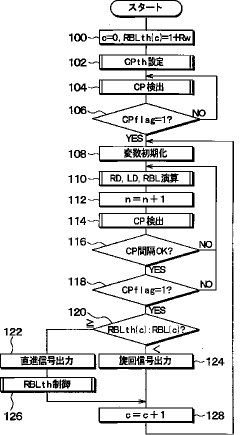
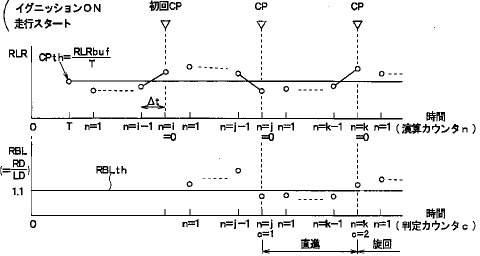
<初期設定>車両の起動、例えばイグニッションONによって車両の走行が始まると、ステップ100で直進か否かを判定した回数を表わす判定カウンタ値cをc=0に、直進判定閾値RBLthをRBLth=1+Rwに初期化する。ここでRwは1の近傍を数値化する数、例えば0.1とすると、閾値RBLth(0)=1.1である。なお、左右の車輪速VFR,VFLは、フローチャートには特に示されていないがコントローラのCPUによって演算周期Δtで逐次演算されている。
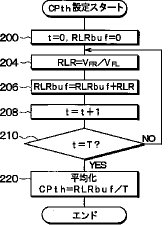
【0031】次にステップ102で、CP検出閾値CPthを設定する。その詳細を図3のフローチャートにより説明する。まずステップ200で時間カウンタ値tをt=0に、車輪速比積算バッファ値RLRbufをRLRbuf=0にそれぞれ初期化する。次にステップ204で、演算周期の1秒毎に車輪速比RLR=VFR/VFLを演算する。これは、車輪速演算手段13および車輪速比演算手段21の機能に相当する。ステップ206で、車輪速比積算バッファ値RLRbufに上記演算された車輪速比RLRを加算するとともに、ステップ208で時間カウンタ値tを1インクリメントする。ステップ210で時間カウンタ値tが予め設定した所定時間Tに達したかを判定し、達していない場合はステップ204に戻り、達した場合はステップ220に移行する。ステップ220では、車輪速比積算バッファ値RLRbufを上記所定時間Tで平均化しその値をCP検出閾値CPthとする。なお所定時間Tは、100〜200演算周期、例えば150秒に設定する。したがって、ステップ220で算出、設定するCP検出閾値CPthは一定時間(150秒間)内の車輪速比RLRの平均値であり、左右の車輪速比の変動中心値に相当する。ステップ200〜220の処理は、CP閾値設定手段23および車輪速比演算手段21に相当する。
【0032】タイヤ半径や路面状態等の変動のない理想状態においては、車輪速比RLRの値が変わるのは、旋回角の変化する場合、すなわち直進(旋回角=0)から旋回または旋回から直進への変化(右旋回から左旋回への切替わりも含まれる)に相当する。現実の走行状態ではタイヤ回転によるタイヤ半径の変動、路面の凹凸、タイヤ・路面間の摩擦などの変動要因により、車輪速比の変化は必ずしも旋回角の変化を表わすものではないが、本実施形態では、この車輪速比の変動中心値を、初期設定以降で直進と旋回の切替わり時点に相当する可能性が高いものとしてCPを検出するための閾値に用いる。
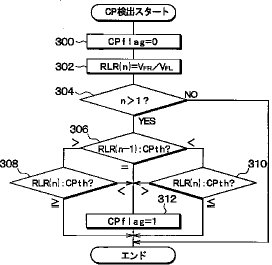
<初回CP検出>CP検出閾値CPthが設定されると、次にステップ104で、最初の有効なCPが検出される。その詳細を図4のフローチャートにより説明する。このルーチンでは、車輪速比RLRの変化がCP検出閾値CPthのレベルを越える、すなわち、CPthに対してRLRが低い値から高い値へと変化する時点、または、CPthに対してRLRが高い値から低い値へと変化する時点をそれぞれCPであると判定するものである。
【0033】ステップ300で、CPが検出されたときに1を立てるCPフラグを、初期化のためCPflag=0とする。次にステップ302で、現時点、すなわち第n回目の演算周期での車輪速比RLR(n)を演算する。ステップ304で、nが1以下であればCPの検出にはデータが不足しているものとしてこのルーチンを終了し、nが2以上であれば、ステップ306へ移行する。ステップ306では、一回前に演算された車輪速比RLR(n−1)とステップ102で設定されたCP検出閾値CPthとを比較し、RLR(n−1)>CPthの場合はステップ308へ、RLR(n−1)<CPthの場合はステップ310へ、RLR(n−1)=CPthの場合はRLRの大きな変化の途中段階にあるもの、すなわちCPを検出したものとみなしてステップ312へそれぞれ移行する。
【0034】ステップ308では、ステップ302で今回演算された車輪速比RLR(n)とステップ102で設定されたCP検出閾値CPthとを比較する。ここで、RLR(n)<CPthの場合はRLR(n−1)>CPth>RLR(n)とRLRが大きく変化したためCPを検出したものとしてステップ312へ移行する。RLR(n−1)≧CPthの場合はRLRの変化が小さいものであるのでCP検出はなくこのルーチンを終了する。一方、ステップ310では、車輪速比RLR(n)とCP検出閾値CPthとを比較し、RLR(n)>CPthの場合はRLR(n−1)<CPth<RLR(n)と大きく変化したためCPを検出したものとしてステップ312へ移行し、RLR(n−1)≦CPthの場合はRLRの変化が小さいものであるのでCP検出はなくこのルーチンを終了する。
【0035】ステップ312では、ステップ306、308および310のいずれかでCP検出と判定できるので、CPフラグをCPflag=1とする。以上、ステップ300〜312からなるステップ104の処理は、後述するステップ114とともにCP検出手段22および車輪速比演算手段21に相当する。
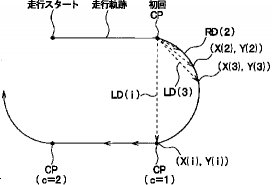
【0036】以上のCP検出状況を図7の例で説明する。なお、図7の車輪速比RLRおよび距離比RBLに関するタイムチャートは、図6に示す走行スタートからの車両の走行軌跡に対応したものとして描いてある。図7R>7の例では、走行スタート後の直進走行中に、1回前(演算カウンタn=i−1)と今回(n=i)の演算の結果、RLR(i−1)<CPth<RLR(i)と変化したので、n=iで初回のCPを検出したことを示している。なお図7に示すように、演算カウンタnは後述するステップ108において、0にリセットされる。
【0037】次に、図2のステップ106で、CPフラグCPflagが1であるか否かを判定し、1であればステップ108へ移行して2回目以降のCP検出および直進判定の繰り返し処理を実行し、そうでなければステップ104へ戻って最初のCPの検出処理を行う。
【0038】このステップ106までが、イグニッションON後の初期設定であり、これにより実走距離RD,直線距離LD,距離比RBL=RD/LDの算出の基点となる最初のCPが検出されたことになる。
<CPにおける距離比による直進判定>ステップ108では、変数の初期化処理として、演算カウンタn、実走距離RD(n=0)(以下、n回目の演算結果をRD(n)のように記す)、直線距離LD(0)、後述する左右輪の平均車輪速Vave、x座標X(0)、y座標Y(0)、旋回角の累積値θall(0)をすべて0とおく。
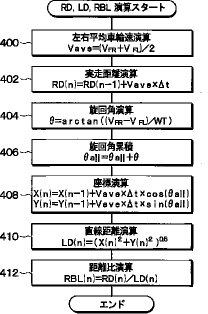
【0039】ステップ110で、実走距離RDおよび直線距離LDと、実走距離と直線距離との比である距離比RBL=RD/LDを、それぞれ演算する。その詳細を図5に示す。ステップ400で、この演算時点での左右輪の平均車輪速Vaveを、右車輪速VFRおよび左車輪速VFLを用いてVave=(VFR+VFL)/2により演算する。この平均車輪速Vaveは車体の移動速度に相当する。ステップ402で、第n演算回目の実走距離RD(n)として、数式1に示すように1回前の演算結果RD(n−1)に、現時点の平均車輪速Vaveによる1演算周期Δt間の車体移動速度Vave×Δtを加算することにより近似する。
【0040】
【数1】
RD(n)=RD(n−1)+Vave×Δt次に、ステップ404では、左右の車輪速VFR,VFLと前輪の輪距(ホイールトレッド)WTとにより、第n演算回目の1演算周期間の旋回角θを数式2で演算する。ただし、arctanは逆正接である。
【0041】
【数2】
θ=arctan((VFR−VFL)/WT)
ステップ406で、第n演算回目までの旋回角の累積値θallを上記旋回角θでインクリメントする。ステップ408で、走行平面での車体の位置座標値X(n),Y(n)を数式3で演算する。
【0042】
【数3】X(n)=X(n−1)+Vave×Δt×cos(θall)
Y(n)=Y(n−1)+Vave×Δt×sin(θall)
ステップ410で、x座標値およびy座標値を用いて数式4により第n演算回時点でのn=0からの、すなわち前回のCPからの直線距離LD(n)を演算する。
【0043】
【数4】LD(n)=(X(n)2+Y(n)2)0.5ステップ412で、ステップ402および410で演算された実走距離RDと直線距離LDとの距離比RBLを数式5により演算する。
【0044】
【数5】RBL(n)=RD(n)/LD(n)
上記ステップ400〜412の処理は、距離演算手段31および距離比演算手段32に相当する。図6にRDとLDの関係を示す。CPを基点として演算周期ΔtでRD,LD,およびRBLが演算される。図6中演算カウンタ値n=1,2,…,iでの直線距離LDをそれぞれ点線で示す。実走距離RDは走行軌跡にほぼ沿った微小直線距離の積算値として同じくΔt毎に演算され、距離比RBLは両者の比としてΔt毎に演算される。
【0045】図2に戻り、ステップ112で、演算周期Δtに同期して演算カウンタnを1インクリメントした後、ステップ114でCPを検出する。その詳細は上述した図4のフローチャートと同様であるので説明は省略する。
【0046】次にステップ116で、今回および前回に検出したCPの間隔が妥当かを評価する。これは2つのCP間の経過時間が所定値以上であるか、またはCP間の実走距離RDが所定値以上であるかによって判定し、CP間隔が時間的または距離的に長いと判定した場合は検出したCPを有効CPとして出力し、短いと判定した場合は検出したCPを無効とし、ステップ110に戻りRD,LD,RBLの演算を継続する。このステップ116の実行により、短い間隔で検出されたCPを無効として排除することができ、直進判定におけるチャタリングを防止することができる。
【0047】ステップ118では、CPフラグCPflagが1であるかを判定し、1でなければCPが検出されていないのでステップ110に戻り、1であればステップ120に移行する。
【0048】ステップ120では、CPを検出した時点でのステップ412で演算された距離比RBL(c)=RD(c)/LD(c)とステップ100で設定された直進判定閾値RBLth(c)(=1.1)とを比較し、RBL(c)が閾値以下であれば実走距離と直線距離との差が小さい、或いはほぼ等しいので直進状態と判定し、ステップ122へ移行して直進信号を出力し、そうでなければ実走距離RDが直線距離LDより大きい、すなわち旋回状態と判定し、ステップ124へ移行して旋回信号を出力したのち、ステップ128で判定カウンタcを1インクリメントする。
【0049】以上、ステップ108以降の実行による処理結果を図7で説明すると、演算カウンタn=iで最初のCPが検出された後、Δt毎に車輪速比RLR,実走距離RD,直線距離LD,距離比RBLが演算される。図7中、演算カウンタn=j−1でRLR(j−1)>CPthであったところ、n=jでRLR(j)<CPthとなったため、n=jでCPが検出されて演算カウンタnがリセットされ、同時に比較の結果RBL(j)<RBLthであるため、この時点が直進状態と判定され、判定カウンタがc=1とされる。そして、次にRLRが大きく変化してCPthを越えた演算カウンタn=kの時点で、次のCPが検出され演算カウンタnがリセットされ、RBL(k)>RBLthであるためこの時点が旋回状態と判定され判定カウンタがc=2とされる。以降、走行が続く限りこのような処理が継続される。
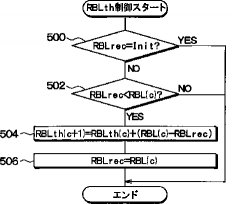
【0050】直進信号が出力されるとステップ126で直進判定閾値RBLthを修正制御する。その詳細を図8のフローチャートおよび図9のタイムチャートを用いて説明する。なお、以下では、前回、直進判定閾値以下であり直進と判定されたRBL値をRBLrecとする。
【0051】ステップ500で、RBLrecが初期値Initとしての最大値、例えば999であるかを判定する。この初期値Initはステップ100でRBLrec=Initと設定しておく。RBLrecがInitであれば初回の直進判定時であるのでこのルーチンを終了し、そうでなければ、2回目以降の直進判定閾値設定であるのでステップ502へ移行する。すなわち、初回の直進判定時には、ステップ100で設定された直進判定閾値RBLth=1+Rw=1.1を用い、第2回目以降で、このRBLthをステップ502以降のルーチンにより修正制御する。
【0052】ステップ502では、CP検出時点でのRBL(c)がRBLrecより大か否かを判定し、yesならばステップ504へ移行し、noであればこのルーチンを終了する。
【0053】ステップ504では、RBL(c)とRBLrecとの差で演算値RBL(c)をインクリメントして次回(すなわち判定カウンタ値c+1)での直進判定閾値RBLth(c+1)とする。そして、ステップ506でRBLrecを今回のRBL(c)の値で置き換えて、このルーチンを終了する。
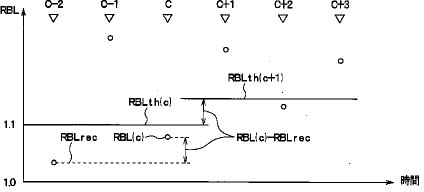
【0054】図9において、〇印は各CP検出時点(▽で示す)でのRBL値を示しており、CP検出毎に直進(c−2,c,c+2)と旋回(c−1,c+1,c+3)とが交互に判定されるべき状況を表わしている。
【0055】判定カウンタcでのRBL(c)は閾値RBLth(c)より小さいので直進と判定される。そして、RBL(c)は前回の直進判定時、すなわち図9中判定カウンタc−2でのRBLrecより大きいため、RBLth(c)+(RBL(c)−RBLrec)を新たな直進判定閾値RBLth(c+1)と修正し、次回(判定カウンタc+1)での判定に用いる。図9は、直進状態でのRBL値が時間と共に増加しても、直進状態を正しく判定できることを示している。このようにして、走行状態により変動するRBL値に応じて、直進判定閾値RBLthを適宜修正、制御することができる。
【0056】上述した一連の処理が終了すると、ステップ128で判定カウンタcを1増加させ、次のCPを検出すべくステップ108へ戻る。
【0057】以上説明したように、本第1実施形態の車両の直進判別装置は、左右の車輪速比RLRの変化がCP検出閾値CPthのレベルを、小から大、または大から小へと越えるとチェックポイントCPの発生とみなし(すなわち、CP検出とし)、前回のCPから今回のCPまでの2点間の車両の実走距離RDと直線距離LDとの距離比RBLが閾値RBLthより小さいとき直進と判定するので、特にテストコースのようなそれぞれ長い直線区間と旋回区間との繰り返し走行においても、直進状態を正確に判別することができる。
【0058】(第1実施形態の変形例)上記第1実施形態は、下記のような種々の変形を施すことができる。
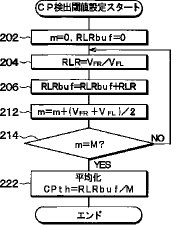
(1)ステップ102におけるCP検出閾値CPthを、車輪速比の一定時間における平均値ではなく、図10のフローチャートに示すように一定の走行距離による平均値で設定してもよい。すなわち、ステップ202では、走行距離カウンタmおよび車輪速比積算バッファ値RLRbufを共に0に初期設定する。ステップ204〜206は図3と同じであるので説明は省略する。ステップ212では、走行距離カウンタ値mを左右の車輪速の平均値(VFR+VFL)/2でインクリメントする。ステップ214で、走行距離カウンタmが予め設定した所定距離に相当する値Mに等しいか否かを判定し、等しければステップ222へ、等しくなければステップ204へ移行する。ステップ222では、CP検出閾値CPthを、車輪速積算バッファ値RLRbufを上記所定距離値Mで平均化した値として設定する。これにより、走行速度が大きく変わる場合でも、適切なCP検出閾値を設定することができる。
(2)ステップ102におけるCP検出閾値CPthを、走行状態に拘わらず固定値に設定してもよい。
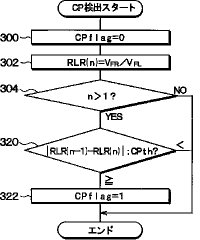
(3)ステップ104および118におけるCP検出において、上記第1実施形態では図4に示すように車輪速比RLRの変化が閾値CPthのレベルをよぎったかどうかでCP発生を検出したが、車輪速比の変化量RLRwそのものが閾値CPthより大きいか否かを判定基準としても同様の効果が得られる。図11のフローチャートにおいて、ステップ300〜304は図4と同様であるので説明を省略する。ステップ320で、今回演算された車輪速比RLR(n)と前回演算された車輪速比RLR(n−1)との差の絶対値がCP検出閾値CPth以上であると判定された場合はステップ322へ移行し、そうでない場合はこのルーチンを終了する。ステップ322では、CPが検出されたのでCPフラグCPflagを1としてこのルーチンを終了する。
(4)ステップ116でのCP間隔の評価は、省略することができる。このステップを省略する場合は、車輪速比RLRと閾値CPthとの比較により検出されたCP全てが有効CPとなり、その有効CPにおいて直進/旋回判定を行うこととなる。
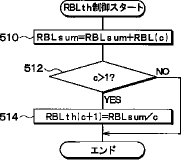
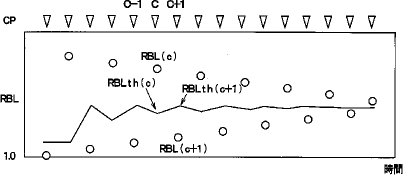
(5)ステップ124における直進判定閾値RBLthの修正制御を、上述した図8のフローチャートの代わりに、図12に示すフローチャートにより行ってもよい。なお、RBL値の過去の積算値をRBLsumと記す。ステップ510で、直進/旋回の判定に使われた距離比RBL(c)の累積値を演算しRBLsumとおく。ステップ512で判定カウンタcが2以上であることを確認し、ステップ514で、次回(すなわち判定カウンタ値c+1)での直進判定閾値RBLthを距離比の積算値RBLsumの評価回数cによる平均値としてこのルーチンを終了する。図13に、上記処理状況をCP検出毎(図1313中▽で示す)に評価される直進および旋回状態のRBL値(図13中〇で示す)が時間と共に一定値に近づく例、即ち比較的RBL値の小さい直進走行状態のグループが徐々に値を増加し、比較的RBL値の大きい旋回走行状態のグループが徐々に値を減少する例を示す。直進判定閾値RBLthはRBLの累積値RBLsumの平均値であるのでRBL値の変動中心の値となり、したがって、比較すべきRBL値が走行状態に応じて変動しても直進および旋回の状態を正しく判別することができる。
【0059】以上の(1)から(5)の変形例は、それぞれ必要に応じ適宜組み合わせて上記第1実施形態に用いることができる。
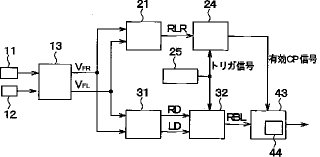
【0060】(第2実施形態)図14は本発明の第2実施形態の機能ブロックを示す図である。第1実施形態と同じ機能部分は同一の符号を付し、説明は省略する。また、変数や定数等も、特に断らない限り第1実施形態と同じである。
【0061】CPトリガ発生手段25は、一定時間(たとえば15秒)毎または一定走行距離(たとえば200m)毎にトリガ信号を出力する。車輪速比変動幅評価手段24は、車輪速比演算手段21が出力する左右車輪の車輪速比RLRと、CPトリガ発生手段25からのトリガ信号をたとえば10個入力し、トリガ信号の入力時点毎の車輪速比の変動幅RLRwが小さい、すなわち前回の車輪速比との差が小さいものを有効CPとし、そのときの車輪速比RLRと共に出力する。
【0062】判定手段43は、車輪速比変化幅評価手段24が出力するタイミング信号としての有効CP信号が入力する時点(すなわち判定カウンタ値c)での距離比演算手段32からの実走距離RDと直線距離LDとの距離比RBL(c)が最小となる有効CP信号の発生時点を直進状態と判定する。さらに、判定手段43は後述するように直進走行データ選別手段44を有しており、この直進走行データ選別手段44が上記有効CPと判定された時点の車輪速比RLRを直進状態判別基準値と定め、以降のチェックポイントでは車輪速比が直進状態判別基準値の近傍値である場合に直ちに直進状態と判定するものである。
【0063】本第2実施形態においても前記第1実施形態と同様、上記各手段は、図示しないコントローラ内のCPUでコンピュータプログラムが実行されることにより各機能が実現されている。その動作をフローチャートに基づき説明する。
【0064】図15は本第2実施形態のメインフローを示す図である。また、図17は、その処理過程を示すタイムチャートである。本第2実施形態においても、基本的な演算周期Δtは第1実施形態と同様1秒に設定されており、左右の車輪速VFR、VFLは1秒毎に車輪速演算手段13より出力される。
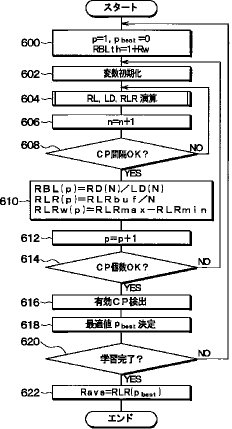
【0065】車両の起動、例えばイグニッションONによって車両の走行が始まると、まず、ステップ600で、CPの発生をカウントするCPカウンタ値pを1、距離比RBLに基づき直線とみなしたときのCPカウンタ値pbestを0とおくと共に、直進判定閾値RBLthをRBLth=1+Rw(=1.1)に初期化する。次にステップ602で、次のような変数の初期化を行う。ただし、RLRminは左右車輪速比の最小値、RLRmaxは左右車輪速比の最大値であり、他の変数は上記第1実施例と同じである。
【0066】
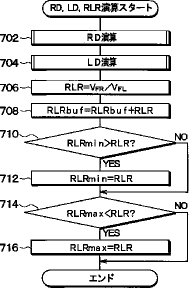
【数6】RD(0)=LD(0)=0RLRbuf(0)=0RLRmin=999RLRmax=−999Vave=0X(0)=Y(0)=0θall=0n=1ステップ604で、車輪速演算手段13より車輪速VFR、VFLが出力される度に、実走距離RD、直線距離LDおよび距離比RLRの演算を行う。その詳細を図16のフローチャートに示す。ステップ702でRDを演算し、ステップ704でLDを演算する。それぞれの演算処理は図5のステップ400〜402およびステップ404〜410と同様であるので説明を省略する。
【0067】ステップ706で左右の車輪速比RLR=VFR/VFLを演算し、ステップ708で車輪速比積算バッファ値RLRbufを演算されたRLRでインクリメントする。
【0068】次に、ステップ710で上記演算されたRLRとこれまでの車輪速比最小値RLRminとを比較しRLRmin>RLRならば、ステップ712でRLRminをステップ706で演算されたRLRで置き換え、そうでないならばステップ714へ移行する。ステップ714で、ステップ706で演算されたRLRとこれまでの車輪速比最大値RLRmaxとを比較しRLRmax<RLRならばRLRmaxを上記演算されたRLRで置き換え、そうでないならばこのルーチンを終了する。これにより、演算周期ΔtでRD、LD、RLRを演算し、RLRの最大値および最小値の更新を行う。以上、ステップ706〜716の処理は、車輪速比演算手段21に相当する。
【0069】次に、ステップ606で、演算カウンタnを1増加させたのち、ステップ608でCPを設定すべきかをCP間隔の評価により判定する。すなわち、ステップ608では、演算カウンタ値nが予め設定した一定時間に相当するN(たとえば15秒に相当する数である15)に達したか否かを判定し、Nに達するまでステップ604に戻ることを繰り返す。あるいは、ステップ608で、一定時間ではなく、実走距離RDが一定の走行距離RDth(たとえば1kmに相当する数)に達したか否かを判定することによってCP間隔の評価を行ってもよい。
【0070】ステップ608で、CPの間隔として適切かの判定、すなわち、演算カウンタnが一定時間Nに達した、または実走距離RDが一定距離RDthに達したと判定された場合は、CPが検出されたものとして、ステップ610で、CPカウンタ値pにおける距離比RBL(p)、車輪速比RLR(p)、車輪速比変動幅RLRw(p)をそれぞれ次の式により演算する。なお下記は一定時間Nに達した場合の標記を示す。ステップ608の実行により、前回のCPから今回のCPまでの2点間の実走距離および直線距離が演算されたことになる。
【0071】
【数7】RBL(p)=RD(N)/LD(N)
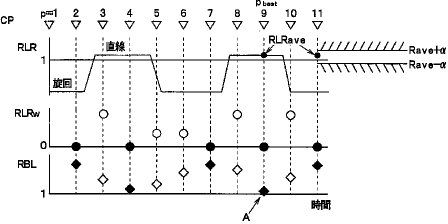
RLR(p)=RLRbuf/NRLRw(p)=RLRmax−RLRmin次にステップ612でCPカウンタ値pを1インクリメントし、ステップ614で検出されたCPの数が所定数P(たとえば10)に達したか否かを判定し、所定数Pに達するまでステップ602に戻ることを繰り返す。この処理状況を図17のタイムチャートで説明すると、予め、例えば15秒毎に設定(すなわち検出)されたCPは▽印で示されている。この設定されたCPの発生時点でCPカウンタ値pが1ずつ増加する。車輪速相対値としての車輪速比RLRは1秒の演算周期で演算され旋回、直進の各走行状態に応じて値が変化している。また、車輪速比変動幅RLRw(p)および距離比RLB(p)が、トリガ信号に同期して各CP毎に演算され、それぞれ丸印および菱印で示されている。
【0072】そして、ステップ616では次のようにして、設定、検出したCPの内、有効CPとすべきCPを選択する。すなわち、ステップ604で演算されたP−1個のRLRの変動幅RLRwの内、小さい方から一定割合の数、例えばP/2個のRLRwの値を有効とし、その時のCPを有効CPとする。図17で、有効なRLRwを●印、無効とするRLRwを○印で示す。あるいは、車輪速比変動幅閾値RLRwthを予め設定しておき、このRLRwth以下のRLRwの値を有効とし、その時のCPを有効CPとしてもよい。このように、RLRwが比較的小さいCPでは検出値および演算値の信頼度が高いといえるので、それを抽出して有効CPと設定することができる。
【0073】上記ステップ606〜616の処理は、距離比演算手段32および車輪速比変動幅評価手段24に相当する。
【0074】次に、ステップ618で、上記ステップ610で演算された距離比RBL値のうち最小となるRBL値が得られる有効CP(図17で、A点)でのCPカウンタ値(図17ではp=9)を、直進とみなしたときのCPカウンタ値、すなわち最適値pbestに決定する。ステップ620でpbestが0でなければ初回の直進判定学習が終了したものとしてステップ622へ移行し、そうでなければ、ステップ600へ戻って上記初回学習処理を再度繰り返す。これらステップ618,620の処理は判定手段43に相当する。
【0075】ステップ622では、初回学習結果として最適なCPカウンタ値pbestにおける車輪速相対量としての車輪速比RLRを、これ以降の直進判定のための直進状態判別基準値としての車輪速比閾値Rave、すなわち、直進時における車輪速比の変動中心値と定め、この初回学習処理を終了する。そして、直進走行データ選別手段44は、次回以降の直進判定においては、この初回学習値である車輪速比閾値Raveを用いて、1秒の演算周期で演算される車輪速比RLRのCP毎(たとえば15秒毎)の平均値RLR(p)が、αをRaveの近傍値をあらわす所定値として、Rave−α<RLR(p)<Rave+αの範囲にあるとき直進状態と判定するアルゴリズムによる処理を継続する。このステップの処理は、判定手段43が有する直進走行データ選別手段44に相当する。
【0076】以上説明したように、本第2実施形態は一定時間または一定走行距離毎に与えた所定数のCPのうち、車輪速比変動幅の比較的小さいものを信頼性が高いCPとして抽出して、それらを有効CPに定め、その有効CPの中で距離比が最小となる有効CPを直進走行状態と判定するものであるので、簡便な処理でかつ信頼度よく直進状態を判別できる。しかも、このように直進状態と判定したときの車輪速比をそれ以降の直進状態判別基準値として、走行中逐次演算される車輪速比と比較して直進走行状態を判別するので、正確な判別処理を簡単な処理で継続することができる。
【0077】(第2実施形態の変形例)上記第2実施形態は、下記のような変形を施すことができる。
(6)ステップ616および618における、有効CPの中で最適値pbestを決定する方法として、車輪速比変動幅RLRwを評価することなく、単に実走距離と直線距離との距離比RBLが最小となるときのCPにおけるCPカウンタ値pをpbestとすることができる。この場合、ステップ610において車輪速比変動幅RLRwを演算する必要はない。
【0078】(第1および第2実施形態の変形例)
(7)ABS(アンチロックブレーキシステム)装置を有する車両では、その制御のために各輪のスリップ状態を演算しているので、タイヤ空気圧判定装置とABS装置とを共に有する場合、車輪スリップ状態を例えば1輪以上で検出したとき、あるいは、直進判別を行う際に用いる左右の車輪速度を演算する過程で、左右輪にスリップ状態が発生したことを検出したときには、CPの設定の禁止あるいは直進走行状態の判別の禁止を行うようにしてもよい。
【図面の簡単な説明】
【図1】本発明の第1実施形態の車両の直進判別装置の構成を示す機能ブロック図である。
【図2】本発明の第1実施形態の車両の直進判別装置におけるメインフローチャートである。
【図3】本発明の第1実施形態の車両の直進判別装置におけるCP検出閾値CPth設定のフローチャートである。
【図4】本発明の第1実施形態の車両の直進判別装置におけるCP検出のフローチャートである。
【図5】本発明の第1実施形態の車両の直進判別装置における実走距離,直線距離,距離比演算のフローチャートである。
【図6】本発明の第1実施形態の車両の直進判別装置における走行軌跡の例を示す図である。
【図7】図6の走行軌跡に対応する処理過程を示すタイムチャートである。
【図8】本発明の第1実施形態の車両の直進判別装置における直進判定閾値制御のフローチャートである。
【図9】本発明の第1実施形態の車両の直進判別装置における直進判定閾値制御の処理過程を示すタイムチャートである。
【図10】本発明の第1実施形態の車両の直進判別装置におけるCP検出閾値CPth設定の変形例のフローチャートである。
【図11】本発明の第1実施形態の車両の直進判別装置におけるCP検出の変形例のフローチャートである。
【図12】本発明の第1実施形態の車両の直進判別装置における直進判定閾値制御の変形例のフローチャートである。
【図13】図10のフローチャートによる処理過程を示すタイムチャートである。
【図14】本発明の第2実施形態の車両の直進判別装置の構成を示す機能ブロック図である。
【図15】本発明の第2実施形態の車両の直進判別装置におけるメインフローチャートである。
【図16】本発明の第2実施形態の車両の直進判別装置における実走距離、直線距離、車輪速比演算のフローチャートである。
【図17】本発明の第2実施形態の車両の直進判別装置における処理過程を示すタイムチャートである。
【符号の説明】
11…右車輪速センサ、12…車輪速センサ、13…車輪速演算手段、21…車輪速比演算手段、22…チェックポイント(CP)検出手段、23…CP閾値設定手段、24…車輪速比変動幅評価手段、25…CPトリガ発生検出手段、31…距離演算手段、32…距離比演算手段、41,43…判定手段、42…直進判定閾値設定手段、44…直進走行データ選別手段。
【0001】
【発明の属する技術分野】本発明は、車両の走行状態が直進であるか否かを判別する装置に関するもので、例えば、左右車輪の回転数差を利用した動荷重半径方式のタイヤ空気圧警報装置に用いて好適である。
【0002】
【従来の技術および発明が解決しようとする課題】従来より、車両走行中のタイヤの転がり半径がタイヤ内の空気圧に比例することを利用して、各輪のタイヤの転がり半径、具体的には左右輪の回転数差によりタイヤ空気圧の低下を検出し警報を出力する動荷重半径方式のタイヤ空気圧警報装置がある。この場合、左右輪が共に空気圧の低下がなく適正な圧力状態であっても、車両の旋回中では車体の左右輪において旋回半径が異なり、旋回外輪は旋回内輪よりも旋回半径が大きいため、旋回外輪の車輪の車速が旋回内輪よりも大きくなったり、さらには、車両の旋回時の荷重移動により旋回外側の車輪半径の方が旋回内側の車輪半径よりも小さくなる。このため、正しいタイヤ空気圧を検出することができない。したがって、車両が直進走行中か否かを判別し、直進中の測定値に基づいて空気圧低下を判断する技術が知られている。
【0003】例えば、空気圧判定に適当でない車両の旋回状態をステアリングセンサによって検出するもの(特開平7−172121号公報)や、左右車輪速比の所定時間内の平均値を基準とし、これからある差分が生じた場合は旋回中であると判定するもの(特開平8−282222号公報)等がある。しかし、前者は車輪速センサ以外にステアリングセンサや、場合によっては横Gセンサ、ヨーレートセンサなども必要となるためコストが高くなるという問題がある。また、後者は、例えば一定方向の旋回と直進とが繰り返されるオーバルコースなどで端的に現れるように、平均値そのものが適切な値、すなわち直進走行時の平均値ではなく、直進走行時と旋回走行時との中間状態を表わす値となってしまい、これを基準値として直進判定を行うと、意図した効果が得られないという問題がある。
【0004】本発明は上記点に鑑みて、車輪速データのみから直進走行であることを正確に判定することを目的とする。
【0005】
【課題を解決するための手段】上記目的を達成するため、請求項1に記載の発明は、車両の左右の車輪速度を検出する車輪速検出手段と、前記検出された車輪速度に基づき2点間の前記車両が実際に走行した実走距離および前記2点間の直線距離を演算する距離演算手段と、前記演算された実走距離と直線距離とを比較し距離比較値を演算する距離比較演算手段と、前記距離比較値に基づき直進走行か否かを判定する判定手段と、、を具備することを特徴とする。
【0006】この発明によれば、検出された車両の左右の車輪速度より算出した車両走行に伴う車両の2点間の実走距離および直線距離の比較結果である距離比較値に基づいて、車両走行が直進走行か否かを判定する、すなわち前記距離比較値が実走距離と直線距離とが等しいことを表わす値またはその近傍値であれば直進走行とみなせるので、車輪速センサにより検出された車輪速データのみから直進走行であることを正確に判定することができる。
【0007】なお、上記距離比較値は、実走距離と直線距離との大小関係を表わす値であれば何でもよく、例えば、実走距離と直線距離との距離比であれば、その距離比は直進走行時には1または1に近い値となり、また、実走距離と直線距離との距離差(あるいは距離差の絶対値)であれば、その距離差は直進走行時には0または0に近い値となる。
【0008】また、請求項2に記載の発明は、車両の左右の車輪速度を検出する車輪速検出手段と、前記検出された車輪速度より左右の車輪速度の間の車輪速相対量を算出する車輪速相対量演算手段と、前記算出された車輪速相対量に基づき直進か否かを判定する点を決定するための有効チェックポイントを検出するチェックポイント検出手段と、前記検出された車輪速度に基づき2点間の前記車両が実際に走行した実走距離および前記2点間の直線距離を演算する距離演算手段と、前記演算された実走距離と直線距離とを比較し距離比較値を演算する距離比較演算手段と、前記距離比較値と前記検出された有効チェックポイントとに基づき直進走行か否かを判定する判定手段と、を具備することを特徴とする。
【0009】この発明によれば、車両の左右の車輪速度の間の車輪速相対量に基づいて直進走行および旋回走行の変化点に相当する可能性のある有効チェックポイントを検出するとともに、車輪速度より車両の実走距離と直線距離との間の距離比較値を演算し、有効チェックポイント毎の距離比較値によって直進走行か否かを判定するものであるので、車輪速を検出するセンサのみで時系列的に検出される有効チェックポイント毎に、直進走行時には実走距離と直線距離とが等しいことを表わす値またはその近傍値となる距離比較値により、直進走行か否かを正確に判別することができる。
【0010】なお、上記車輪速相対量は、上述した距離比較値と同様、左右の車輪速度の大小関係を表わす値であれば何でもよく、例えば、左右の車輪速度の比である速度比でも、あるいは、左右の車輪速度の差である速度差(または速度差の絶対値)でもよい。
【0011】上記実走距離は、請求項3に記載のように、前記距離演算手段によって、演算開始時点から前記車輪速度を積算することにより演算することができる。
【0012】また、上記直線距離は、請求項4に記載のように、前記距離演算手段により、演算開始時点を始点とし該始点から現時点までの直線距離として演算することができる。
【0013】さらにまた、上記直線距離は、請求項5に記載のように、前記距離演算手段によって、前記有効チェックポイントを始点とし演算周期毎に前記始点からの直線距離として演算することができる。
【0014】請求項6に記載の発明は、前記距離演算手段は、前記車両の輪距と前記左右の車輪速度とにより前記車両の旋回角を算出すると共に、前記旋回角の前記始点からの累積値と前記車輪速度とに基づき現時点の座標を演算し、該座標より前記直線距離を演算することを特徴とする。
【0015】この発明によれば、2点間の直線距離を、車両の旋回角の始点からの累積値と左右の車輪速度とから現在地点の座標を求め、前記始点と現在地点との2点間の直線距離として演算することができる。なお、車両の旋回角の累積値は車両の輪距と左右の車輪速度とから演算できる。したがって、センサとして車輪速検出手段のみから直線距離を得ることができる。
【0016】上記距離比較値を、請求項7に記載のように、前記距離比演算手段によって、前記有効チェックポイントを前記2点の一方の時点とするとともに、前記2つの有効チェックポイント間の実走距離と直線距離との比として演算することができる。
【0017】上記チェックポイント検出手段が検出する有効チェックポイントは、請求項8に記載のように、前記車輪速相対量とチェックポイント用閾値とを比較することにより検出するようにしても、請求項10に記載のように、前記車輪速相対量の変動幅とチェックポイント用閾値とを比較することにより検出するようにしてもよい。
【0018】この場合、車輪速相対量と比較するチェックポイント用閾値および車輪速相対量の変動幅と比較するチェックポイント用閾値はそれぞれ、比較対象の物理量の大きさを考慮して予め設定されるものである。
【0019】また、前記チェックポイント検出手段による有効チェックポイントの検出は、請求項9に記載のように、前記車輪速相対量が前記チェックポイント用閾値より小さい値から大きい値へと変化したとき、または、前記車輪速相対量が前記チェックポイント用閾値より大きい値から小さい値へと変化したときのいずれかの場合に行うようにしてもよい。
【0020】さらに、この有効チェックポイントは、請求項12に記載のように予め設定されたチェックポイントのうち前記車輪速相対量の変動幅の大きさに基づいて所定のチェックポイントを抽出することにより検出するようにしてもよい。この場合、例えば車両の走行中一定時間毎、あるいは一定距離走行毎に予めチェックポイントを発生し、その中から車輪速相対量の変動幅の大きさに応じて、例えば請求項13に記載のように変動幅の大きさが所定範囲内にあるチェックポイントを抽出して有効チェックポイントとして検出することができる。
【0021】そして、上記判定手段が行う直進走行か否かの判定は、請求項11に記載のように、前記距離比較値と直進判定用閾値とを比較することにより行ってもよいし、また、請求項14に記載のように、前記有効チェックポイントにおける前記距離比較値のうち、前記実走距離と直線距離との差が最も小さいときの値となる有効チェックポイントで直進走行であると判定することによって行ってもよい。なお、ここで距離比較値が実走距離と直線距離との差が最も小さい値となるとは、上述した距離比較値が距離比の場合には、距離比が1に最も近い値となることであり、距離比較値が距離差の場合には、距離差が0に最も近い値となることである。
【0022】請求項15に記載の発明は、前記判定手段が、前記直進走行であると判定したときの車輪速相対量を直進状態判別基準値に設定し、該直進状態判別基準値の設定時点以降の前記予め設定されたチェックポイントにおける車輪速相対量が前記直進状態判別基準値の近傍値である場合に直進状態であると判定する直進走行データ選別手段を更に有することを特徴とする。
【0023】この発明によれば、判定手段が予め設定したチェックポイントのうち、車輪速相対量の変動が比較的小さく、かつ、距離比較値が、実走距離と直線距離との差が最も小さいときの値となる時点を有効チェックポイントと定め、その有効チェックポイントでの車輪速相対量を直進状態判別基準値とし、それ以降は予め設定したチェックポイントにおける車輪速相対量が上記直進状態判別基準値の近傍の値であるときに直進と判定するようにしたので、簡便なシステムで正確な直進判別を継続することができる。
【0024】
【発明の実施の形態】本発明の各実施の形態を、図面を用いて詳細に説明する。
【0025】(第1実施形態)図1は、本第1実施形態の機能ブロックを示す図である。駆動輪である前右輪および前左輪の各々の回転速度を検出する右車輪速センサ11および左車輪速センサ12からの5ms毎の信号は、車輪速演算手段13に入力される。車輪速演算手段13は、各センサ信号の1秒間の、すなわち200個のデータの平均値VFR、VFLを1秒毎に算出し出力する。本発明において左右の車輪速度とは、左右の駆動輪であっても、左右の従動輪であっても、言い換えれば、左右の前輪であっても、左右の後輪であっても、いずれの場合でも直進判別でき、判別結果に変わりはない。以降の説明では、上記平均値VFR、VFLをそれぞれ、右車輪速および左車輪速、または単に車輪速と称する。また、以下で説明する各手段での演算周期Δtは上記車輪速の平均化処理の周期であり、例えば1秒間である。センサ信号の出力周期および各演算手段の演算周期は共に、必要に応じ任意に設定することができる。
【0026】車輪速VFR、VFLは、車輪速相対量演算手段としての車輪速比演算手段21に入力され、車輪速比演算手段21は車輪速比RLR=VFR/VFLを演算し出力する。また、車輪速VFR、VFLは、距離演算手段31に入力され、距離演算手段31は後述する方法によって、車両の演算開始時点の位置から現在位置までの実際に走行した距離である実走距離RDと、演算開始時点の位置と現在位置との間の直線距離LDとを演算し出力する。なお、車輪速相対量は左右の車輪速度の大小関係を表わすものであれば、両者の差でも両者の比でも何れでもよい。すなわち、差の場合はその値が0に近いほど、また、比の場合はその値が1に近いほど、それぞれ直進状態に近いことを示している。そして、後述する各種閾値も、相対量が差の値か比の値かに応じて適宜与えられる。本実施形態では、車輪速比を車輪速相対量としている。
【0027】演算された車輪速比RLRはチェックポイント検出手段22に入力される。チェックポイントとは、車両が直進状態であるか否かを判定する時点を決めるもので、複数のチェックポイントがある場合にその中で特に上記判定を行う時点を有効チェックポイントと称する。以下では、チェックポイントをCPと記す。CP検出手段22は、CP閾値設定手段23から出力されるCP検出閾値CPthと左右車輪速比RLRとを比較し、その結果に応じて前記有効CPを決定し有効CP信号を出力する。
【0028】一方、算出された実走距離RD及び直線距離LDは、距離比較演算手段としての距離比演算手段32に入力される。距離比演算手段32は、演算周期Δtで実走距離RDと直線距離LDとの距離比RBL=RD/LDを演算し、距離比較値として出力する。なお、距離比較値は、実走距離と直線距離との大小関係をあらわすものであれば、両者の比であっても両者の差であっても何れでもよい。すなわち、距離比の場合はその値が1に近いほど、また、距離差の場合はその値が0に近いほど、それぞれ直進状態に近いことを示している。本実施形態では、距離比を距離比較値としている。
【0029】判定手段41は、CP検出手段22からの有効CP信号および直進判定閾値設定手段42からの直進判定閾値RBLthと距離比演算手段32からの距離比RBLとを入力し、有効CPにおける距離比RBLが直進判別閾値RBLth以下である場合に、実走距離RDと直線距離LDとの差が小さい直進状態と判定し直進信号を出力する。
【0030】上記車輪速演算手段13、車輪速比演算手段21、CP検出手段22、CP閾値設定手段23、距離演算手段31、距離比演算手段32、判定手段41および直進判定閾値設定手段42は、図示しない車載されたコントローラ内のCPUでコンピュータプログラムが実行されることにより各機能が実現されている。その動作をフローチャートに基づき説明する。図2は本第1実施形態の車両の直進判別装置のメインフローを示す図である。
<初期設定>車両の起動、例えばイグニッションONによって車両の走行が始まると、ステップ100で直進か否かを判定した回数を表わす判定カウンタ値cをc=0に、直進判定閾値RBLthをRBLth=1+Rwに初期化する。ここでRwは1の近傍を数値化する数、例えば0.1とすると、閾値RBLth(0)=1.1である。なお、左右の車輪速VFR,VFLは、フローチャートには特に示されていないがコントローラのCPUによって演算周期Δtで逐次演算されている。
【0031】次にステップ102で、CP検出閾値CPthを設定する。その詳細を図3のフローチャートにより説明する。まずステップ200で時間カウンタ値tをt=0に、車輪速比積算バッファ値RLRbufをRLRbuf=0にそれぞれ初期化する。次にステップ204で、演算周期の1秒毎に車輪速比RLR=VFR/VFLを演算する。これは、車輪速演算手段13および車輪速比演算手段21の機能に相当する。ステップ206で、車輪速比積算バッファ値RLRbufに上記演算された車輪速比RLRを加算するとともに、ステップ208で時間カウンタ値tを1インクリメントする。ステップ210で時間カウンタ値tが予め設定した所定時間Tに達したかを判定し、達していない場合はステップ204に戻り、達した場合はステップ220に移行する。ステップ220では、車輪速比積算バッファ値RLRbufを上記所定時間Tで平均化しその値をCP検出閾値CPthとする。なお所定時間Tは、100〜200演算周期、例えば150秒に設定する。したがって、ステップ220で算出、設定するCP検出閾値CPthは一定時間(150秒間)内の車輪速比RLRの平均値であり、左右の車輪速比の変動中心値に相当する。ステップ200〜220の処理は、CP閾値設定手段23および車輪速比演算手段21に相当する。
【0032】タイヤ半径や路面状態等の変動のない理想状態においては、車輪速比RLRの値が変わるのは、旋回角の変化する場合、すなわち直進(旋回角=0)から旋回または旋回から直進への変化(右旋回から左旋回への切替わりも含まれる)に相当する。現実の走行状態ではタイヤ回転によるタイヤ半径の変動、路面の凹凸、タイヤ・路面間の摩擦などの変動要因により、車輪速比の変化は必ずしも旋回角の変化を表わすものではないが、本実施形態では、この車輪速比の変動中心値を、初期設定以降で直進と旋回の切替わり時点に相当する可能性が高いものとしてCPを検出するための閾値に用いる。
<初回CP検出>CP検出閾値CPthが設定されると、次にステップ104で、最初の有効なCPが検出される。その詳細を図4のフローチャートにより説明する。このルーチンでは、車輪速比RLRの変化がCP検出閾値CPthのレベルを越える、すなわち、CPthに対してRLRが低い値から高い値へと変化する時点、または、CPthに対してRLRが高い値から低い値へと変化する時点をそれぞれCPであると判定するものである。
【0033】ステップ300で、CPが検出されたときに1を立てるCPフラグを、初期化のためCPflag=0とする。次にステップ302で、現時点、すなわち第n回目の演算周期での車輪速比RLR(n)を演算する。ステップ304で、nが1以下であればCPの検出にはデータが不足しているものとしてこのルーチンを終了し、nが2以上であれば、ステップ306へ移行する。ステップ306では、一回前に演算された車輪速比RLR(n−1)とステップ102で設定されたCP検出閾値CPthとを比較し、RLR(n−1)>CPthの場合はステップ308へ、RLR(n−1)<CPthの場合はステップ310へ、RLR(n−1)=CPthの場合はRLRの大きな変化の途中段階にあるもの、すなわちCPを検出したものとみなしてステップ312へそれぞれ移行する。
【0034】ステップ308では、ステップ302で今回演算された車輪速比RLR(n)とステップ102で設定されたCP検出閾値CPthとを比較する。ここで、RLR(n)<CPthの場合はRLR(n−1)>CPth>RLR(n)とRLRが大きく変化したためCPを検出したものとしてステップ312へ移行する。RLR(n−1)≧CPthの場合はRLRの変化が小さいものであるのでCP検出はなくこのルーチンを終了する。一方、ステップ310では、車輪速比RLR(n)とCP検出閾値CPthとを比較し、RLR(n)>CPthの場合はRLR(n−1)<CPth<RLR(n)と大きく変化したためCPを検出したものとしてステップ312へ移行し、RLR(n−1)≦CPthの場合はRLRの変化が小さいものであるのでCP検出はなくこのルーチンを終了する。
【0035】ステップ312では、ステップ306、308および310のいずれかでCP検出と判定できるので、CPフラグをCPflag=1とする。以上、ステップ300〜312からなるステップ104の処理は、後述するステップ114とともにCP検出手段22および車輪速比演算手段21に相当する。
【0036】以上のCP検出状況を図7の例で説明する。なお、図7の車輪速比RLRおよび距離比RBLに関するタイムチャートは、図6に示す走行スタートからの車両の走行軌跡に対応したものとして描いてある。図7R>7の例では、走行スタート後の直進走行中に、1回前(演算カウンタn=i−1)と今回(n=i)の演算の結果、RLR(i−1)<CPth<RLR(i)と変化したので、n=iで初回のCPを検出したことを示している。なお図7に示すように、演算カウンタnは後述するステップ108において、0にリセットされる。
【0037】次に、図2のステップ106で、CPフラグCPflagが1であるか否かを判定し、1であればステップ108へ移行して2回目以降のCP検出および直進判定の繰り返し処理を実行し、そうでなければステップ104へ戻って最初のCPの検出処理を行う。
【0038】このステップ106までが、イグニッションON後の初期設定であり、これにより実走距離RD,直線距離LD,距離比RBL=RD/LDの算出の基点となる最初のCPが検出されたことになる。
<CPにおける距離比による直進判定>ステップ108では、変数の初期化処理として、演算カウンタn、実走距離RD(n=0)(以下、n回目の演算結果をRD(n)のように記す)、直線距離LD(0)、後述する左右輪の平均車輪速Vave、x座標X(0)、y座標Y(0)、旋回角の累積値θall(0)をすべて0とおく。
【0039】ステップ110で、実走距離RDおよび直線距離LDと、実走距離と直線距離との比である距離比RBL=RD/LDを、それぞれ演算する。その詳細を図5に示す。ステップ400で、この演算時点での左右輪の平均車輪速Vaveを、右車輪速VFRおよび左車輪速VFLを用いてVave=(VFR+VFL)/2により演算する。この平均車輪速Vaveは車体の移動速度に相当する。ステップ402で、第n演算回目の実走距離RD(n)として、数式1に示すように1回前の演算結果RD(n−1)に、現時点の平均車輪速Vaveによる1演算周期Δt間の車体移動速度Vave×Δtを加算することにより近似する。
【0040】
【数1】
RD(n)=RD(n−1)+Vave×Δt次に、ステップ404では、左右の車輪速VFR,VFLと前輪の輪距(ホイールトレッド)WTとにより、第n演算回目の1演算周期間の旋回角θを数式2で演算する。ただし、arctanは逆正接である。
【0041】
【数2】
θ=arctan((VFR−VFL)/WT)
ステップ406で、第n演算回目までの旋回角の累積値θallを上記旋回角θでインクリメントする。ステップ408で、走行平面での車体の位置座標値X(n),Y(n)を数式3で演算する。
【0042】
【数3】X(n)=X(n−1)+Vave×Δt×cos(θall)
Y(n)=Y(n−1)+Vave×Δt×sin(θall)
ステップ410で、x座標値およびy座標値を用いて数式4により第n演算回時点でのn=0からの、すなわち前回のCPからの直線距離LD(n)を演算する。
【0043】
【数4】LD(n)=(X(n)2+Y(n)2)0.5ステップ412で、ステップ402および410で演算された実走距離RDと直線距離LDとの距離比RBLを数式5により演算する。
【0044】
【数5】RBL(n)=RD(n)/LD(n)
上記ステップ400〜412の処理は、距離演算手段31および距離比演算手段32に相当する。図6にRDとLDの関係を示す。CPを基点として演算周期ΔtでRD,LD,およびRBLが演算される。図6中演算カウンタ値n=1,2,…,iでの直線距離LDをそれぞれ点線で示す。実走距離RDは走行軌跡にほぼ沿った微小直線距離の積算値として同じくΔt毎に演算され、距離比RBLは両者の比としてΔt毎に演算される。
【0045】図2に戻り、ステップ112で、演算周期Δtに同期して演算カウンタnを1インクリメントした後、ステップ114でCPを検出する。その詳細は上述した図4のフローチャートと同様であるので説明は省略する。
【0046】次にステップ116で、今回および前回に検出したCPの間隔が妥当かを評価する。これは2つのCP間の経過時間が所定値以上であるか、またはCP間の実走距離RDが所定値以上であるかによって判定し、CP間隔が時間的または距離的に長いと判定した場合は検出したCPを有効CPとして出力し、短いと判定した場合は検出したCPを無効とし、ステップ110に戻りRD,LD,RBLの演算を継続する。このステップ116の実行により、短い間隔で検出されたCPを無効として排除することができ、直進判定におけるチャタリングを防止することができる。
【0047】ステップ118では、CPフラグCPflagが1であるかを判定し、1でなければCPが検出されていないのでステップ110に戻り、1であればステップ120に移行する。
【0048】ステップ120では、CPを検出した時点でのステップ412で演算された距離比RBL(c)=RD(c)/LD(c)とステップ100で設定された直進判定閾値RBLth(c)(=1.1)とを比較し、RBL(c)が閾値以下であれば実走距離と直線距離との差が小さい、或いはほぼ等しいので直進状態と判定し、ステップ122へ移行して直進信号を出力し、そうでなければ実走距離RDが直線距離LDより大きい、すなわち旋回状態と判定し、ステップ124へ移行して旋回信号を出力したのち、ステップ128で判定カウンタcを1インクリメントする。
【0049】以上、ステップ108以降の実行による処理結果を図7で説明すると、演算カウンタn=iで最初のCPが検出された後、Δt毎に車輪速比RLR,実走距離RD,直線距離LD,距離比RBLが演算される。図7中、演算カウンタn=j−1でRLR(j−1)>CPthであったところ、n=jでRLR(j)<CPthとなったため、n=jでCPが検出されて演算カウンタnがリセットされ、同時に比較の結果RBL(j)<RBLthであるため、この時点が直進状態と判定され、判定カウンタがc=1とされる。そして、次にRLRが大きく変化してCPthを越えた演算カウンタn=kの時点で、次のCPが検出され演算カウンタnがリセットされ、RBL(k)>RBLthであるためこの時点が旋回状態と判定され判定カウンタがc=2とされる。以降、走行が続く限りこのような処理が継続される。
【0050】直進信号が出力されるとステップ126で直進判定閾値RBLthを修正制御する。その詳細を図8のフローチャートおよび図9のタイムチャートを用いて説明する。なお、以下では、前回、直進判定閾値以下であり直進と判定されたRBL値をRBLrecとする。
【0051】ステップ500で、RBLrecが初期値Initとしての最大値、例えば999であるかを判定する。この初期値Initはステップ100でRBLrec=Initと設定しておく。RBLrecがInitであれば初回の直進判定時であるのでこのルーチンを終了し、そうでなければ、2回目以降の直進判定閾値設定であるのでステップ502へ移行する。すなわち、初回の直進判定時には、ステップ100で設定された直進判定閾値RBLth=1+Rw=1.1を用い、第2回目以降で、このRBLthをステップ502以降のルーチンにより修正制御する。
【0052】ステップ502では、CP検出時点でのRBL(c)がRBLrecより大か否かを判定し、yesならばステップ504へ移行し、noであればこのルーチンを終了する。
【0053】ステップ504では、RBL(c)とRBLrecとの差で演算値RBL(c)をインクリメントして次回(すなわち判定カウンタ値c+1)での直進判定閾値RBLth(c+1)とする。そして、ステップ506でRBLrecを今回のRBL(c)の値で置き換えて、このルーチンを終了する。
【0054】図9において、〇印は各CP検出時点(▽で示す)でのRBL値を示しており、CP検出毎に直進(c−2,c,c+2)と旋回(c−1,c+1,c+3)とが交互に判定されるべき状況を表わしている。
【0055】判定カウンタcでのRBL(c)は閾値RBLth(c)より小さいので直進と判定される。そして、RBL(c)は前回の直進判定時、すなわち図9中判定カウンタc−2でのRBLrecより大きいため、RBLth(c)+(RBL(c)−RBLrec)を新たな直進判定閾値RBLth(c+1)と修正し、次回(判定カウンタc+1)での判定に用いる。図9は、直進状態でのRBL値が時間と共に増加しても、直進状態を正しく判定できることを示している。このようにして、走行状態により変動するRBL値に応じて、直進判定閾値RBLthを適宜修正、制御することができる。
【0056】上述した一連の処理が終了すると、ステップ128で判定カウンタcを1増加させ、次のCPを検出すべくステップ108へ戻る。
【0057】以上説明したように、本第1実施形態の車両の直進判別装置は、左右の車輪速比RLRの変化がCP検出閾値CPthのレベルを、小から大、または大から小へと越えるとチェックポイントCPの発生とみなし(すなわち、CP検出とし)、前回のCPから今回のCPまでの2点間の車両の実走距離RDと直線距離LDとの距離比RBLが閾値RBLthより小さいとき直進と判定するので、特にテストコースのようなそれぞれ長い直線区間と旋回区間との繰り返し走行においても、直進状態を正確に判別することができる。
【0058】(第1実施形態の変形例)上記第1実施形態は、下記のような種々の変形を施すことができる。
(1)ステップ102におけるCP検出閾値CPthを、車輪速比の一定時間における平均値ではなく、図10のフローチャートに示すように一定の走行距離による平均値で設定してもよい。すなわち、ステップ202では、走行距離カウンタmおよび車輪速比積算バッファ値RLRbufを共に0に初期設定する。ステップ204〜206は図3と同じであるので説明は省略する。ステップ212では、走行距離カウンタ値mを左右の車輪速の平均値(VFR+VFL)/2でインクリメントする。ステップ214で、走行距離カウンタmが予め設定した所定距離に相当する値Mに等しいか否かを判定し、等しければステップ222へ、等しくなければステップ204へ移行する。ステップ222では、CP検出閾値CPthを、車輪速積算バッファ値RLRbufを上記所定距離値Mで平均化した値として設定する。これにより、走行速度が大きく変わる場合でも、適切なCP検出閾値を設定することができる。
(2)ステップ102におけるCP検出閾値CPthを、走行状態に拘わらず固定値に設定してもよい。
(3)ステップ104および118におけるCP検出において、上記第1実施形態では図4に示すように車輪速比RLRの変化が閾値CPthのレベルをよぎったかどうかでCP発生を検出したが、車輪速比の変化量RLRwそのものが閾値CPthより大きいか否かを判定基準としても同様の効果が得られる。図11のフローチャートにおいて、ステップ300〜304は図4と同様であるので説明を省略する。ステップ320で、今回演算された車輪速比RLR(n)と前回演算された車輪速比RLR(n−1)との差の絶対値がCP検出閾値CPth以上であると判定された場合はステップ322へ移行し、そうでない場合はこのルーチンを終了する。ステップ322では、CPが検出されたのでCPフラグCPflagを1としてこのルーチンを終了する。
(4)ステップ116でのCP間隔の評価は、省略することができる。このステップを省略する場合は、車輪速比RLRと閾値CPthとの比較により検出されたCP全てが有効CPとなり、その有効CPにおいて直進/旋回判定を行うこととなる。
(5)ステップ124における直進判定閾値RBLthの修正制御を、上述した図8のフローチャートの代わりに、図12に示すフローチャートにより行ってもよい。なお、RBL値の過去の積算値をRBLsumと記す。ステップ510で、直進/旋回の判定に使われた距離比RBL(c)の累積値を演算しRBLsumとおく。ステップ512で判定カウンタcが2以上であることを確認し、ステップ514で、次回(すなわち判定カウンタ値c+1)での直進判定閾値RBLthを距離比の積算値RBLsumの評価回数cによる平均値としてこのルーチンを終了する。図13に、上記処理状況をCP検出毎(図1313中▽で示す)に評価される直進および旋回状態のRBL値(図13中〇で示す)が時間と共に一定値に近づく例、即ち比較的RBL値の小さい直進走行状態のグループが徐々に値を増加し、比較的RBL値の大きい旋回走行状態のグループが徐々に値を減少する例を示す。直進判定閾値RBLthはRBLの累積値RBLsumの平均値であるのでRBL値の変動中心の値となり、したがって、比較すべきRBL値が走行状態に応じて変動しても直進および旋回の状態を正しく判別することができる。
【0059】以上の(1)から(5)の変形例は、それぞれ必要に応じ適宜組み合わせて上記第1実施形態に用いることができる。
【0060】(第2実施形態)図14は本発明の第2実施形態の機能ブロックを示す図である。第1実施形態と同じ機能部分は同一の符号を付し、説明は省略する。また、変数や定数等も、特に断らない限り第1実施形態と同じである。
【0061】CPトリガ発生手段25は、一定時間(たとえば15秒)毎または一定走行距離(たとえば200m)毎にトリガ信号を出力する。車輪速比変動幅評価手段24は、車輪速比演算手段21が出力する左右車輪の車輪速比RLRと、CPトリガ発生手段25からのトリガ信号をたとえば10個入力し、トリガ信号の入力時点毎の車輪速比の変動幅RLRwが小さい、すなわち前回の車輪速比との差が小さいものを有効CPとし、そのときの車輪速比RLRと共に出力する。
【0062】判定手段43は、車輪速比変化幅評価手段24が出力するタイミング信号としての有効CP信号が入力する時点(すなわち判定カウンタ値c)での距離比演算手段32からの実走距離RDと直線距離LDとの距離比RBL(c)が最小となる有効CP信号の発生時点を直進状態と判定する。さらに、判定手段43は後述するように直進走行データ選別手段44を有しており、この直進走行データ選別手段44が上記有効CPと判定された時点の車輪速比RLRを直進状態判別基準値と定め、以降のチェックポイントでは車輪速比が直進状態判別基準値の近傍値である場合に直ちに直進状態と判定するものである。
【0063】本第2実施形態においても前記第1実施形態と同様、上記各手段は、図示しないコントローラ内のCPUでコンピュータプログラムが実行されることにより各機能が実現されている。その動作をフローチャートに基づき説明する。
【0064】図15は本第2実施形態のメインフローを示す図である。また、図17は、その処理過程を示すタイムチャートである。本第2実施形態においても、基本的な演算周期Δtは第1実施形態と同様1秒に設定されており、左右の車輪速VFR、VFLは1秒毎に車輪速演算手段13より出力される。
【0065】車両の起動、例えばイグニッションONによって車両の走行が始まると、まず、ステップ600で、CPの発生をカウントするCPカウンタ値pを1、距離比RBLに基づき直線とみなしたときのCPカウンタ値pbestを0とおくと共に、直進判定閾値RBLthをRBLth=1+Rw(=1.1)に初期化する。次にステップ602で、次のような変数の初期化を行う。ただし、RLRminは左右車輪速比の最小値、RLRmaxは左右車輪速比の最大値であり、他の変数は上記第1実施例と同じである。
【0066】
【数6】RD(0)=LD(0)=0RLRbuf(0)=0RLRmin=999RLRmax=−999Vave=0X(0)=Y(0)=0θall=0n=1ステップ604で、車輪速演算手段13より車輪速VFR、VFLが出力される度に、実走距離RD、直線距離LDおよび距離比RLRの演算を行う。その詳細を図16のフローチャートに示す。ステップ702でRDを演算し、ステップ704でLDを演算する。それぞれの演算処理は図5のステップ400〜402およびステップ404〜410と同様であるので説明を省略する。
【0067】ステップ706で左右の車輪速比RLR=VFR/VFLを演算し、ステップ708で車輪速比積算バッファ値RLRbufを演算されたRLRでインクリメントする。
【0068】次に、ステップ710で上記演算されたRLRとこれまでの車輪速比最小値RLRminとを比較しRLRmin>RLRならば、ステップ712でRLRminをステップ706で演算されたRLRで置き換え、そうでないならばステップ714へ移行する。ステップ714で、ステップ706で演算されたRLRとこれまでの車輪速比最大値RLRmaxとを比較しRLRmax<RLRならばRLRmaxを上記演算されたRLRで置き換え、そうでないならばこのルーチンを終了する。これにより、演算周期ΔtでRD、LD、RLRを演算し、RLRの最大値および最小値の更新を行う。以上、ステップ706〜716の処理は、車輪速比演算手段21に相当する。
【0069】次に、ステップ606で、演算カウンタnを1増加させたのち、ステップ608でCPを設定すべきかをCP間隔の評価により判定する。すなわち、ステップ608では、演算カウンタ値nが予め設定した一定時間に相当するN(たとえば15秒に相当する数である15)に達したか否かを判定し、Nに達するまでステップ604に戻ることを繰り返す。あるいは、ステップ608で、一定時間ではなく、実走距離RDが一定の走行距離RDth(たとえば1kmに相当する数)に達したか否かを判定することによってCP間隔の評価を行ってもよい。
【0070】ステップ608で、CPの間隔として適切かの判定、すなわち、演算カウンタnが一定時間Nに達した、または実走距離RDが一定距離RDthに達したと判定された場合は、CPが検出されたものとして、ステップ610で、CPカウンタ値pにおける距離比RBL(p)、車輪速比RLR(p)、車輪速比変動幅RLRw(p)をそれぞれ次の式により演算する。なお下記は一定時間Nに達した場合の標記を示す。ステップ608の実行により、前回のCPから今回のCPまでの2点間の実走距離および直線距離が演算されたことになる。
【0071】
【数7】RBL(p)=RD(N)/LD(N)
RLR(p)=RLRbuf/NRLRw(p)=RLRmax−RLRmin次にステップ612でCPカウンタ値pを1インクリメントし、ステップ614で検出されたCPの数が所定数P(たとえば10)に達したか否かを判定し、所定数Pに達するまでステップ602に戻ることを繰り返す。この処理状況を図17のタイムチャートで説明すると、予め、例えば15秒毎に設定(すなわち検出)されたCPは▽印で示されている。この設定されたCPの発生時点でCPカウンタ値pが1ずつ増加する。車輪速相対値としての車輪速比RLRは1秒の演算周期で演算され旋回、直進の各走行状態に応じて値が変化している。また、車輪速比変動幅RLRw(p)および距離比RLB(p)が、トリガ信号に同期して各CP毎に演算され、それぞれ丸印および菱印で示されている。
【0072】そして、ステップ616では次のようにして、設定、検出したCPの内、有効CPとすべきCPを選択する。すなわち、ステップ604で演算されたP−1個のRLRの変動幅RLRwの内、小さい方から一定割合の数、例えばP/2個のRLRwの値を有効とし、その時のCPを有効CPとする。図17で、有効なRLRwを●印、無効とするRLRwを○印で示す。あるいは、車輪速比変動幅閾値RLRwthを予め設定しておき、このRLRwth以下のRLRwの値を有効とし、その時のCPを有効CPとしてもよい。このように、RLRwが比較的小さいCPでは検出値および演算値の信頼度が高いといえるので、それを抽出して有効CPと設定することができる。
【0073】上記ステップ606〜616の処理は、距離比演算手段32および車輪速比変動幅評価手段24に相当する。
【0074】次に、ステップ618で、上記ステップ610で演算された距離比RBL値のうち最小となるRBL値が得られる有効CP(図17で、A点)でのCPカウンタ値(図17ではp=9)を、直進とみなしたときのCPカウンタ値、すなわち最適値pbestに決定する。ステップ620でpbestが0でなければ初回の直進判定学習が終了したものとしてステップ622へ移行し、そうでなければ、ステップ600へ戻って上記初回学習処理を再度繰り返す。これらステップ618,620の処理は判定手段43に相当する。
【0075】ステップ622では、初回学習結果として最適なCPカウンタ値pbestにおける車輪速相対量としての車輪速比RLRを、これ以降の直進判定のための直進状態判別基準値としての車輪速比閾値Rave、すなわち、直進時における車輪速比の変動中心値と定め、この初回学習処理を終了する。そして、直進走行データ選別手段44は、次回以降の直進判定においては、この初回学習値である車輪速比閾値Raveを用いて、1秒の演算周期で演算される車輪速比RLRのCP毎(たとえば15秒毎)の平均値RLR(p)が、αをRaveの近傍値をあらわす所定値として、Rave−α<RLR(p)<Rave+αの範囲にあるとき直進状態と判定するアルゴリズムによる処理を継続する。このステップの処理は、判定手段43が有する直進走行データ選別手段44に相当する。
【0076】以上説明したように、本第2実施形態は一定時間または一定走行距離毎に与えた所定数のCPのうち、車輪速比変動幅の比較的小さいものを信頼性が高いCPとして抽出して、それらを有効CPに定め、その有効CPの中で距離比が最小となる有効CPを直進走行状態と判定するものであるので、簡便な処理でかつ信頼度よく直進状態を判別できる。しかも、このように直進状態と判定したときの車輪速比をそれ以降の直進状態判別基準値として、走行中逐次演算される車輪速比と比較して直進走行状態を判別するので、正確な判別処理を簡単な処理で継続することができる。
【0077】(第2実施形態の変形例)上記第2実施形態は、下記のような変形を施すことができる。
(6)ステップ616および618における、有効CPの中で最適値pbestを決定する方法として、車輪速比変動幅RLRwを評価することなく、単に実走距離と直線距離との距離比RBLが最小となるときのCPにおけるCPカウンタ値pをpbestとすることができる。この場合、ステップ610において車輪速比変動幅RLRwを演算する必要はない。
【0078】(第1および第2実施形態の変形例)
(7)ABS(アンチロックブレーキシステム)装置を有する車両では、その制御のために各輪のスリップ状態を演算しているので、タイヤ空気圧判定装置とABS装置とを共に有する場合、車輪スリップ状態を例えば1輪以上で検出したとき、あるいは、直進判別を行う際に用いる左右の車輪速度を演算する過程で、左右輪にスリップ状態が発生したことを検出したときには、CPの設定の禁止あるいは直進走行状態の判別の禁止を行うようにしてもよい。
【図面の簡単な説明】
【図1】本発明の第1実施形態の車両の直進判別装置の構成を示す機能ブロック図である。
【図2】本発明の第1実施形態の車両の直進判別装置におけるメインフローチャートである。
【図3】本発明の第1実施形態の車両の直進判別装置におけるCP検出閾値CPth設定のフローチャートである。
【図4】本発明の第1実施形態の車両の直進判別装置におけるCP検出のフローチャートである。
【図5】本発明の第1実施形態の車両の直進判別装置における実走距離,直線距離,距離比演算のフローチャートである。
【図6】本発明の第1実施形態の車両の直進判別装置における走行軌跡の例を示す図である。
【図7】図6の走行軌跡に対応する処理過程を示すタイムチャートである。
【図8】本発明の第1実施形態の車両の直進判別装置における直進判定閾値制御のフローチャートである。
【図9】本発明の第1実施形態の車両の直進判別装置における直進判定閾値制御の処理過程を示すタイムチャートである。
【図10】本発明の第1実施形態の車両の直進判別装置におけるCP検出閾値CPth設定の変形例のフローチャートである。
【図11】本発明の第1実施形態の車両の直進判別装置におけるCP検出の変形例のフローチャートである。
【図12】本発明の第1実施形態の車両の直進判別装置における直進判定閾値制御の変形例のフローチャートである。
【図13】図10のフローチャートによる処理過程を示すタイムチャートである。
【図14】本発明の第2実施形態の車両の直進判別装置の構成を示す機能ブロック図である。
【図15】本発明の第2実施形態の車両の直進判別装置におけるメインフローチャートである。
【図16】本発明の第2実施形態の車両の直進判別装置における実走距離、直線距離、車輪速比演算のフローチャートである。
【図17】本発明の第2実施形態の車両の直進判別装置における処理過程を示すタイムチャートである。
【符号の説明】
11…右車輪速センサ、12…車輪速センサ、13…車輪速演算手段、21…車輪速比演算手段、22…チェックポイント(CP)検出手段、23…CP閾値設定手段、24…車輪速比変動幅評価手段、25…CPトリガ発生検出手段、31…距離演算手段、32…距離比演算手段、41,43…判定手段、42…直進判定閾値設定手段、44…直進走行データ選別手段。
【特許請求の範囲】
【請求項1】 車両の左右の車輪速度を検出する車輪速検出手段と、前記検出された車輪速度に基づき2点間の前記車両が実際に走行した実走距離および前記2点間の直線距離を演算する距離演算手段と、前記演算された実走距離と直線距離とを比較し距離比較値を演算する距離比較演算手段と、前記距離比較値に基づき直進走行か否かを判定する判定手段と、を具備することを特徴とする車両の直進判別装置。
【請求項2】 車両の左右の車輪速度を検出する車輪速検出手段と、前記検出された車輪速度より左右の車輪速度の間の車輪速相対量を算出する車輪速相対量演算手段と、前記算出された車輪速相対量に基づき直進か否かを判定する点を決定するための有効チェックポイントを検出するチェックポイント検出手段と、前記検出された車輪速度に基づき2点間の前記車両が実際に走行した実走距離および前記2点間の直線距離を演算する距離演算手段と、前記演算された実走距離と直線距離とを比較し距離比較値を演算する距離比較演算手段と、前記距離比較値と前記検出された有効チェックポイントとに基づき直進走行か否かを判定する判定手段と、を具備することを特徴とする車両の直進判別装置。
【請求項3】 前記距離演算手段は、演算開始時点から前記車輪速度を積算することにより前記実走距離を演算することを特徴とする請求項1または2のいずれかに記載の車両の直進判別装置。
【請求項4】 前記距離演算手段は、前記直線距離を、演算開始時点を始点とし該始点から現時点までの直線距離として演算することを特徴とする請求項1または2のいずれかに記載の車両の直進判別装置。
【請求項5】 前記距離演算手段は、前記有効チェックポイントを始点とし演算周期毎に前記始点からの直線距離を演算することを特徴とする請求項2に記載の車両の直進判別装置。
【請求項6】 前記距離演算手段は、前記車両の輪距と前記左右の車輪速度とにより前記車両の旋回角を算出すると共に、前記旋回角の前記始点からの累積値と前記車輪速度とに基づき現時点の座標を演算し、該座標より前記直線距離を演算することを特徴とする請求項4または5のいずれかに記載の車両の直進判別装置。
【請求項7】 前記距離比較演算手段は、前記有効チェックポイントを前記2点の一方の時点とするとともに、前記2つの有効チェックポイント間の実走距離と直線距離との比を前記距離比較値とする演算を行うことを特徴とする請求項2に記載の車両の直進判別装置。
【請求項8】 前記チェックポイント検出手段は、前記車輪速相対量とチェックポイント用閾値とを比較することにより前記有効チェックポイントを検出することを特徴とする請求項2ないし7のいずれか1つに記載の車両の直進判別装置。
【請求項9】 前記チェックポイント検出手段は、前記車輪速相対量が前記チェックポイント用閾値より小さい値から大きい値へと変化したとき、または、前記車輪速相対量が前記チェックポイント用閾値より大きい値から小さい値へと変化したときのいずれかの場合に前記有効チェックポイントを検出することを特徴とする請求項8に記載の車両の直進判別装置。
【請求項10】 前記チェックポイント検出手段は、前記車輪速相対量の変動幅とチェックポイント用閾値とを比較することにより前記有効チェックポイントを検出することを特徴とする請求項2ないし7のいずれか1つに記載の車両の直進判別装置。
【請求項11】 前記判定手段は、前記距離比較値と直進判定用閾値とを比較することにより直進走行か否かを判定することを特徴とする請求項1ないし10のいずれか1つに記載の車両の直進判別装置。
【請求項12】 前記チェックポイント検出手段は、予め設定されたチェックポイントのうち前記車輪速相対量の変動幅の大きさに基づいて所定のチェックポイントを抽出することにより前記有効チェックポイントを検出することを特徴とする請求項2ないし7のいずれか1つに記載の車両の直進判別装置。
【請求項13】 前記チェックポイント検出手段は、予め設定されたチェックポイントのうち前記車輪速相対量の変動幅の大きさが所定範囲内にあるチェックポイントを抽出して前記有効チェックポイントとして検出することを特徴とする請求項12に記載の車両の直進判別装置。
【請求項14】 前記判定手段は、前記有効チェックポイントにおける前記距離比較値のうち、前記実走距離と直線距離との差が最も小さいときの値となる有効チェックポイントで直進走行であると判定することを特徴とする請求項12または13に記載の車両の直進判別装置。
【請求項15】 前記判定手段が、直進走行データ選別手段を更に有し、該直進走行データ選別手段は、前記直進走行であると判定したときの車輪速相対量を直進状態判別基準値に設定し、該直進状態判別基準値の設定時点以降の前記予め設定されたチェックポイントにおける車輪速相対量が前記直進状態判別基準値の近傍値である場合に直進状態であると判定することを特徴とする請求項14に記載の車両の直進判別装置。
【請求項1】 車両の左右の車輪速度を検出する車輪速検出手段と、前記検出された車輪速度に基づき2点間の前記車両が実際に走行した実走距離および前記2点間の直線距離を演算する距離演算手段と、前記演算された実走距離と直線距離とを比較し距離比較値を演算する距離比較演算手段と、前記距離比較値に基づき直進走行か否かを判定する判定手段と、を具備することを特徴とする車両の直進判別装置。
【請求項2】 車両の左右の車輪速度を検出する車輪速検出手段と、前記検出された車輪速度より左右の車輪速度の間の車輪速相対量を算出する車輪速相対量演算手段と、前記算出された車輪速相対量に基づき直進か否かを判定する点を決定するための有効チェックポイントを検出するチェックポイント検出手段と、前記検出された車輪速度に基づき2点間の前記車両が実際に走行した実走距離および前記2点間の直線距離を演算する距離演算手段と、前記演算された実走距離と直線距離とを比較し距離比較値を演算する距離比較演算手段と、前記距離比較値と前記検出された有効チェックポイントとに基づき直進走行か否かを判定する判定手段と、を具備することを特徴とする車両の直進判別装置。
【請求項3】 前記距離演算手段は、演算開始時点から前記車輪速度を積算することにより前記実走距離を演算することを特徴とする請求項1または2のいずれかに記載の車両の直進判別装置。
【請求項4】 前記距離演算手段は、前記直線距離を、演算開始時点を始点とし該始点から現時点までの直線距離として演算することを特徴とする請求項1または2のいずれかに記載の車両の直進判別装置。
【請求項5】 前記距離演算手段は、前記有効チェックポイントを始点とし演算周期毎に前記始点からの直線距離を演算することを特徴とする請求項2に記載の車両の直進判別装置。
【請求項6】 前記距離演算手段は、前記車両の輪距と前記左右の車輪速度とにより前記車両の旋回角を算出すると共に、前記旋回角の前記始点からの累積値と前記車輪速度とに基づき現時点の座標を演算し、該座標より前記直線距離を演算することを特徴とする請求項4または5のいずれかに記載の車両の直進判別装置。
【請求項7】 前記距離比較演算手段は、前記有効チェックポイントを前記2点の一方の時点とするとともに、前記2つの有効チェックポイント間の実走距離と直線距離との比を前記距離比較値とする演算を行うことを特徴とする請求項2に記載の車両の直進判別装置。
【請求項8】 前記チェックポイント検出手段は、前記車輪速相対量とチェックポイント用閾値とを比較することにより前記有効チェックポイントを検出することを特徴とする請求項2ないし7のいずれか1つに記載の車両の直進判別装置。
【請求項9】 前記チェックポイント検出手段は、前記車輪速相対量が前記チェックポイント用閾値より小さい値から大きい値へと変化したとき、または、前記車輪速相対量が前記チェックポイント用閾値より大きい値から小さい値へと変化したときのいずれかの場合に前記有効チェックポイントを検出することを特徴とする請求項8に記載の車両の直進判別装置。
【請求項10】 前記チェックポイント検出手段は、前記車輪速相対量の変動幅とチェックポイント用閾値とを比較することにより前記有効チェックポイントを検出することを特徴とする請求項2ないし7のいずれか1つに記載の車両の直進判別装置。
【請求項11】 前記判定手段は、前記距離比較値と直進判定用閾値とを比較することにより直進走行か否かを判定することを特徴とする請求項1ないし10のいずれか1つに記載の車両の直進判別装置。
【請求項12】 前記チェックポイント検出手段は、予め設定されたチェックポイントのうち前記車輪速相対量の変動幅の大きさに基づいて所定のチェックポイントを抽出することにより前記有効チェックポイントを検出することを特徴とする請求項2ないし7のいずれか1つに記載の車両の直進判別装置。
【請求項13】 前記チェックポイント検出手段は、予め設定されたチェックポイントのうち前記車輪速相対量の変動幅の大きさが所定範囲内にあるチェックポイントを抽出して前記有効チェックポイントとして検出することを特徴とする請求項12に記載の車両の直進判別装置。
【請求項14】 前記判定手段は、前記有効チェックポイントにおける前記距離比較値のうち、前記実走距離と直線距離との差が最も小さいときの値となる有効チェックポイントで直進走行であると判定することを特徴とする請求項12または13に記載の車両の直進判別装置。
【請求項15】 前記判定手段が、直進走行データ選別手段を更に有し、該直進走行データ選別手段は、前記直進走行であると判定したときの車輪速相対量を直進状態判別基準値に設定し、該直進状態判別基準値の設定時点以降の前記予め設定されたチェックポイントにおける車輪速相対量が前記直進状態判別基準値の近傍値である場合に直進状態であると判定することを特徴とする請求項14に記載の車両の直進判別装置。
【図1】


【図2】
【図3】
【図4】
【図10】
【図5】
【図6】
【図7】
【図8】
【図9】
【図12】
【図11】
【図13】
【図14】
【図15】
【図16】
【図17】
【図2】
【図3】
【図4】
【図10】
【図5】
【図6】
【図7】
【図8】
【図9】
【図12】
【図11】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2003−237331(P2003−237331A)
【公開日】平成15年8月27日(2003.8.27)
【国際特許分類】
【出願番号】特願2002−40166(P2002−40166)
【出願日】平成14年2月18日(2002.2.18)
【出願人】(000004695)株式会社日本自動車部品総合研究所 (1,981)
【出願人】(301065892)株式会社アドヴィックス (1,291)
【Fターム(参考)】
【公開日】平成15年8月27日(2003.8.27)
【国際特許分類】
【出願日】平成14年2月18日(2002.2.18)
【出願人】(000004695)株式会社日本自動車部品総合研究所 (1,981)
【出願人】(301065892)株式会社アドヴィックス (1,291)
【Fターム(参考)】
[ Back to top ]