
車両の経路案内装置
【課題】車両を到達目標である低速走行乗用移動車両(電動車椅子)まで適切に経路案内することができるようにした車両の経路案内装置(カーナビゲーション装置)を提供する。
【解決手段】車両12に搭載されると共に、地図データ上において測位された前記車両の現在位置から設定された目的地までの経路を案内するカーナビゲーション装置10において、低速走行乗用移動車両(電動車椅子26)から送信される前記低速走行乗用移動車両の位置情報を所定時間毎に受信する受信機24と、前記受信される位置情報に基づいて定められる低速走行乗用移動車両の位置を所定時間毎に前記目的地として設定する目的地設定手段(マイクロ・コンピュータ14)とを備える如く構成する。
【解決手段】車両12に搭載されると共に、地図データ上において測位された前記車両の現在位置から設定された目的地までの経路を案内するカーナビゲーション装置10において、低速走行乗用移動車両(電動車椅子26)から送信される前記低速走行乗用移動車両の位置情報を所定時間毎に受信する受信機24と、前記受信される位置情報に基づいて定められる低速走行乗用移動車両の位置を所定時間毎に前記目的地として設定する目的地設定手段(マイクロ・コンピュータ14)とを備える如く構成する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、車両の経路案内装置(カーナビゲーション装置)に関する。
【背景技術】
【0002】
従来より、車両に搭載されると共に、地図データ上において測位された現在位置から設定された目的地までの経路を案内するカーナビゲーション装置が広く知られている。例えば、下記特許文献1に記載のカーナビゲーション装置にあっては、目的地をメモリに登録し、モニタ画面上に目的地を表示すると共に、現在の自車位置から目的地への方向情報も表示することにより、現在の自車位置から見て目的地に至る距離や方向が一目瞭然で把握できるように構成している。
【0003】
一方、下記特許文献2に記載の電動車椅子のように、歩道や車道を走行できて高齢者などによる利用に最適な低速走行乗用移動車両が開発されている。
【特許文献1】特開平5−333768号公報
【特許文献2】特開2007−112363号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
低速走行乗用移動車両は低速であるとしても、高齢者が低速走行乗用移動車両に乗って自宅を出発した後に忘れ物を届けたい場合など、いち早く低速走行乗用移動車両に追い着くには別の車両に乗って追いかける必要がある。
【0005】
しかしながら、従来のカーナビゲーション装置にあっては、地図データ上の固定された任意の場所を目的地として設定する限りであり、低速走行乗用移動車両のような移動車両を目的地として設定することはできず、自車両を低速走行乗用移動車両まで経路案内することができなかった。また、何らかの方法によって低速走行乗用移動車両の現在位置を取得し、その現在位置を目的地として設定して経路案内するとしても、経路案内の最中に低速走行乗用移動車両が移動する可能性があり、到達目標である低速走行乗用移動車両まで適切に経路案内することができないといった問題があった。
【0006】
従って、この発明の目的は、上記した問題を解決し、車両を到達目標である低速走行乗用移動車両まで適切に経路案内することができるようにした車両の経路案内装置を提供することにある。
【課題を解決するための手段】
【0007】
上記の目的を解決するために、請求項1にあっては、車両に搭載されると共に、地図データ上において測位された前記車両の現在位置から設定された目的地までの経路を案内する車両の経路案内装置において、低速走行乗用移動車両から送信される前記低速走行乗用移動車両の位置情報を所定時間毎に受信する受信手段と、前記受信される位置情報に基づいて定められる低速走行乗用移動車両の位置を所定時間毎に前記目的地として設定する目的地設定手段と、を備える如く構成した。
【0008】
また、請求項2に係る車両の経路案内装置にあっては、さらに、前記低速走行乗用移動車両と通信自在に接続されると共に、ディスプレイを有するコンピュータ、を備え、前記コンピュータは、前記低速走行乗用移動車両から送信される低速走行乗用移動車両の位置情報を所定時間毎に入力すると共に、前記入力された位置情報に基づいて前記低速走行乗用移動車両の位置を前記ディスプレイに表示する如く構成した。
【発明の効果】
【0009】
請求項1にあっては、地図データ上において測位された車両の現在位置から設定された目的地までの経路を案内する車両の経路案内装置において、所定時間毎に低速走行乗用移動車両の位置情報を受信し、その位置情報に基づいて定められる低速走行乗用移動車両の位置を所定時間毎に目的地として設定する如く構成したので、車両を到達目標である低速走行乗用移動車両まで適切に経路案内することができる。
【0010】
請求項2に係る車両の経路案内装置にあっては、低速走行乗用移動車両と通信自在に接続されると共に、ディスプレイを有するコンピュータに、所定時間毎に低速走行乗用移動車両の位置情報を入力すると共に、その位置情報に基づいて低速走行乗用移動車両の位置をディスプレイに表示する如く構成したので、上記の効果に加え、コンピュータを低速走行乗用移動車両や車両にとって外部の例えば家庭内に設置することで、家庭内において低速走行乗用移動車両の位置を監視することができる。
【発明を実施するための最良の形態】
【0011】
以下、添付図面に即してこの発明に係る車両の経路案内装置を実施するための最良の形態について説明する。
【実施例1】
【0012】
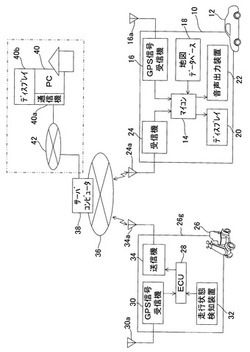
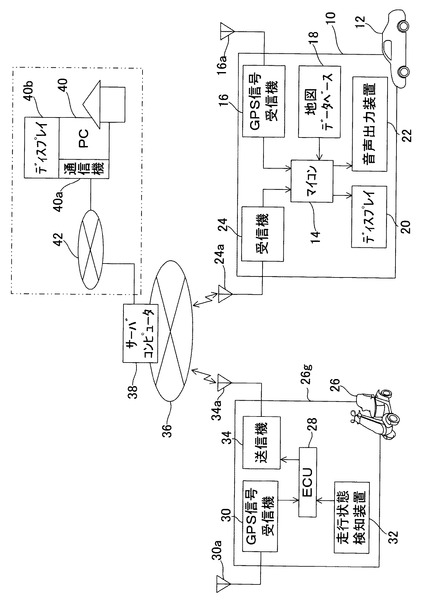
図1は、この発明の実施例に係る車両の経路案内装置と低速走行乗用移動車両の相互関係を全体的に示すブロック図である。
【0013】
図1において、符号10はこの実施例に係る車両の経路案内装置を示す。経路案内装置10は、車両12に搭載されてその車両12の経路を案内する、いわゆるカーナビゲーション装置からなる。
【0014】
カーナビゲーション装置10は、データの演算処理を行うマイクロ・コンピュータ(「マイコン」と示す)14と、GPS(Global Positioning System)信号を受信するGPS信号受信機16と、経路案内用の地図データを格納する地図データベース18と、地図データベース18の地図データなどを表示するディスプレイ20と、音声によって経路案内するための音声出力装置22と、後述する低速走行乗用移動車両に関する情報を受信する受信機24とを備える。
【0015】
GPS信号受信機16は、車両12のダッシュボードなどの適宜な位置に配置されるアンテナ16aを介してGPS信号を受信する。受信されたGPS信号はマイクロ・コンピュータ14に送られ、マイクロ・コンピュータ14はGPS信号およびジャイロセンサ(図示せず)による加速度信号を用いた公知の自律航法に基づいて車両12の現在位置(経度、緯度、高度)を測位する。
【0016】
車両12の現在位置は、ディスプレイ20に地図データと共に表示される。また、予め設定(登録)された目的地も地図データ上に表示される。
【0017】
マイクロ・コンピュータ14は、地図データ上において車両12の現在位置から目的地までの経路を検索する。ここで検索される経路は、車両12の現在位置から目的地までの距離や時間に関しての最短経路(あるいは推奨経路)である。検索された経路も地図データ上に表示される。
【0018】
また、マイクロ・コンピュータ14は、車両12が検索された経路に沿って走行するように音声による経路案内、具体的には「100m先、右折です」などの音声を音声出力装置22を介して出力する。
【0019】
図1において符号26は、低速走行乗用移動車両を示す。
【0020】
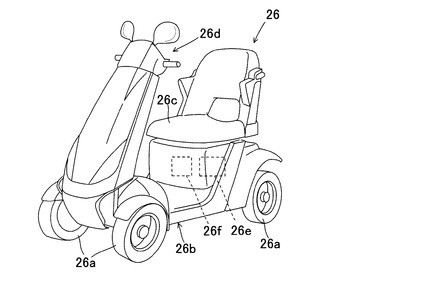
図2はその低速走行乗用移動車両26の斜視図である。
【0021】
図2に示す如く、低速走行乗用移動車両26は、4個の車輪26a(図2において1個見えず)で支持された車体フレーム26bと、車体フレーム26b上に設けられ、図示しない操作者(乗員。ユーザ)が着座すべきシート26cと、操作者に手動操作自在に設けられた操作部26dとを備え、高齢者などの使用に適した、人が歩く速度と同じ程度の低速で走行する一人乗りの比較的小型な電動車、より正確には電動車椅子からなる。
【0022】
電動車椅子26のシート26cの下部には、車輪(正確には後輪)26aを駆動する電動モータ26eと、電動モータ26eなどに動作電力を供給するバッテリ26fが設置される。尚、電動モータ26eはDCブラシレスモータである。
【0023】
また、図1に示すように、電動車椅子26は、その走行を制御する電子制御ユニット(Electric Control Unit。「ECU」と示す)28と、前記したGPS信号受信機16と同様のGPS信号受信機30と、電動車椅子26の走行状態を検知する走行状態検知装置32と、電動車椅子26の各種情報を送信する送信機34とからなる制御ユニット26gを備える。
【0024】
GPS信号受信機30は、電動車椅子の適宜な位置に配置されるアンテナ30aを介してGPS信号を受信する。受信されたGPS信号はECU28に送られ、ECU28はGPS信号およびジャイロセンサ(図示せず)による加速度信号を用いた公知の自律航法に基づいて電動車椅子26の現在位置(経度、緯度、高度)を測位する。
【0025】
走行状態検知装置32によって検知された電動車椅子26の走行状態、具体的には車速やバッテリ残量もECU28に送られる。
【0026】
電動車椅子26の現在位置および走行状態に関する情報は送信機34を介して外部に送信される。具体的には、それら情報は送信機34のアンテナ34aから公知の車路車間通信網36に送信される。それら情報の送信は適宜な所定時間毎、ここでは例えば5秒毎に行われる。
【0027】
車路車間通信網36にはサーバ・コンピュータ38が備えられる。サーバ・コンピュータ38は電動車椅子26から送信されてきた情報を一時的に記憶すると共に、その情報を送信すべき相手方を特定した上で送信する。ここでは、前記したカーナビゲーション装置10の受信機24に向けて送信される。受信機24はアンテナ24aを介して所定時間毎、例えば5秒毎に電動車椅子26の情報を受信する。
【0028】
本発明の特徴は、カーナビゲーション装置10において、電動車椅子26から送信される位置情報を受信し、電動車椅子26の位置を目的地として随時設定し直して経路案内する点にある。以下、それについて説明する。
【0029】
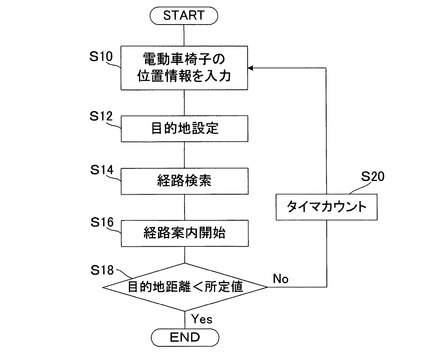
図3は、カーナビゲーション装置10のマイクロ・コンピュータ14によって実行されるプログラムのフロー・チャートである。このプログラムは、カーナビゲーション装置10の電源がオンされることにより開始される。
【0030】
S10において、受信機24によって受信された電動車椅子26の位置情報を入力する。次いでS12に進み、電動車椅子26の位置情報に基づいて地図データ上に電動車椅子26の位置を特定すると共に、特定した電動車椅子26の位置を目的地として設定する。
【0031】
次いでS14に進み、車両12の現在位置から設定された目的地までの経路を検索する。次いでS16に進み、検索した経路をディスプレイ20に表示すると共に、音声による経路案内を開始する。次いでS18に進み、車両12と目的地の距離が所定値未満であるか、換言すれば、車両12が目的地に到達したか判断する。ここで所定値は、50mなど適宜な値に設定される。
【0032】
S18で否定されるとき、S20に進んで所定時間のタイマカウントを行う。ここで所定時間は例えば30秒に設定される。S20で所定時間が経過したと判断されるとき、S10に戻る。
【0033】
S10においては、新たな電動車椅子26の位置情報を入力し、続くS12ではその位置情報に基づいて新たな電動車椅子26の位置を目的地として設定する。続くS14では、車両12の現在位置から新たに設定された目的地までの経路を検索する。次いで、S16に進み、新たに検索された経路に応じて経路案内が行われる。続くS18において否定される限り、S10からS20までの処理が繰り返される。一方、S18で肯定されるとき、即ち車両12が目的地たる電動車椅子26に到達したと判断されるとき、経路案内を終了する。
【0034】
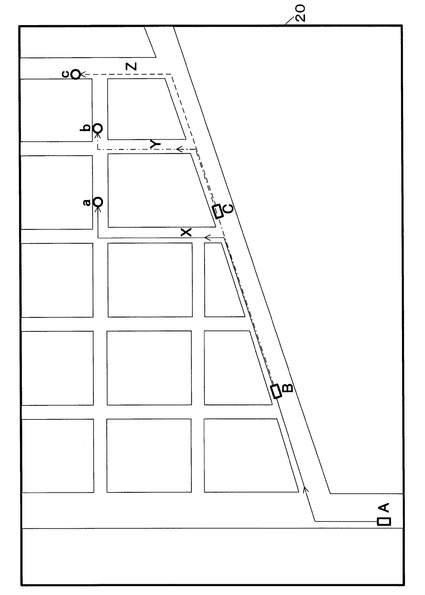
図4は、図3のフロー・チャートのプログラム処理によってディスプレイ20に表示される経路についての説明図である。
【0035】
ある時間において車両12がA地点にいるとき、電動車椅子26がa地点にいると特定されたとすると、a地点を目的地として設定し、A地点からa地点までの最短の経路X(実線)が検索される。車両12は経路Xに沿って進み、所定時間(例えば30秒)後、B地点に到達する。このとき、電動車椅子26がa地点から移動してb地点にいると特定されたとすると、b地点を目的地として設定し直し、B地点からb地点までの最短の経路Y(一点破線)が検索される。これにより、車両12は新たな経路Yに沿って進むことになり、所定時間(例えば30秒)後、C地点に到達する。このとき、電動車椅子26がb地点から移動してc地点にいると特定されたとすると、c地点を目的地として設定し直し、C地点からc地点までの最短の経路Z(破線)が検索される。その後、車両12は新たな経路Zに沿って進み、電動車椅子26まで到達すると、経路案内は終了する。
【0036】
このように、この発明の第1実施例に係るカーナビゲーション装置10にあっては、所定時間毎に受信される電動車椅子26の位置情報に基づいて特定される電動車椅子26の位置を所定時間毎に目的地として設定し直して経路案内するように構成したので、車両12を到達目標である電動車椅子26まで適切に経路案内することができる。
【実施例2】
【0037】
次いで、この発明の第2実施例に係る車両の経路案内装置(カーナビゲーション装置)について説明する。
【0038】
第2実施例にあっては、第1実施例に係る車両の経路案内装置(カーナビゲーション装置)10に対し、さらに、図1の想像線で囲まれた部分において示すように、電動車椅子26と通信自在に接続されるパーソナル・コンピュータ(「PC」と示す)40を備えるように構成した。
【0039】
パーソナル・コンピュータ40は電動車椅子26や車両12にとって外部である、例えば電動車椅子26の所有者の家庭内に設置される。パーソナル・コンピュータ40はインターネット回線42に接続するための通信機40aと、出力を表示するディスプレイ40bとを備える。
【0040】
前記したサーバ・コンピュータ38もインターネット回線42に接続されており、サーバ・コンピュータ38は電動車椅子26から送信される位置情報および走行状態に関する情報をパーソナル・コンピュータ40にも送信する。
【0041】
パーソナル・コンピュータ40は、サーバ・コンピュータ38から送信されてくる電動車椅子26の位置情報を所定時間毎、ここでは例えば5秒毎に入力し、予めインストールされている電子地図ソフトウェアと連動させて、電動車椅子26の位置をディスプレイ40b上に表示する。
【0042】
このように、この発明の第2実施例にあっては、所定時間毎に電動車椅子26の位置情報を家庭内のパーソナル・コンピュータ40に入力すると共に、その位置情報に基づいて電動車椅子26の位置をディスプレイ40bに表示するように構成したので、家庭内において電動車椅子26の位置を監視することができる。
【0043】
以上のように、この発明の第1実施例および第2実施例にあっては、車両(12)に搭載されると共に、地図データ上において測位された前記車両の現在位置から設定された目的地までの経路を案内する車両の経路案内装置(カーナビゲーション装置10)において、低速走行乗用移動車両(電動車椅子26)から送信される前記低速走行乗用移動車両の位置情報を所定時間(5秒)毎に受信する受信手段(受信機24)と、前記受信される位置情報に基づいて定められる低速走行乗用移動車両の位置を所定時間(30秒)毎に前記目的地として設定する目的地設定手段(マイクロ・コンピュータ14、S12)と、を備える如く構成した。
【0044】
また、第2実施例にあっては、さらに、前記低速走行乗用移動車両(電動車椅子26)と通信自在に接続されると共に、ディスプレイ(40b)を有するコンピュータ(パーソナル・コンピュータ40)、を備え、前記コンピュータは、前記低速走行乗用移動車両から送信される低速走行乗用移動車両の位置情報を所定時間毎に入力すると共に、前記入力された位置情報に基づいて前記低速走行乗用移動車両の位置を前記ディスプレイに表示する如く構成した。
【0045】
尚、S14の経路検索の処理は数秒程度の時間を要するという点に鑑み、S10において電動車椅子26の走行状態(特に、車速)に関する情報も入力し、S12において電動車椅子26の位置情報および走行状態に関する情報に基づいて数秒先の電動車椅子26の位置を予測して特定すると共に、予測の電動車椅子26の位置を目的地として設定するようにしても良い。
【0046】
また、S10において電動車椅子26の情報を30秒毎に入力するが、電動車椅子26からは5秒毎に情報が送信されることから、30秒の間に送信される6回分の情報を適宜なメモリに記憶すると共に、それら6回分の情報に基づいて電動車椅子26の移動位置を予測して特定し、その予測位置を目的地として設定するようにしても良い。
【0047】
また、上記において車路車間通信網36を利用するように構成したが、電動車椅子26と車両12との間で直接的に通信する車車間通信であっても良い。
【0048】
また、上記における電動車椅子は低速走行乗用移動車両の一例であり、電動式あるいは車椅子に限られるものではない。
【図面の簡単な説明】
【0049】
【図1】この発明の実施例に係る車両の経路案内装置(カーナビゲーション装置)と低速走行乗用移動車両の相互関係を全体的に示すブロック図である。
【図2】図1に示す低速走行乗用移動車両の斜視図である。
【図3】図1の経路案内装置(カーナビゲーション装置)のマイクロ・コンピュータによって実行されるプログラムのフロー・チャートである。
【図4】図2のフロー・チャートのプログラム処理によってディスプレイに表示される経路についての説明図である。
【符号の説明】
【0050】
10:カーナビゲーション装置(経路案内装置)、12:車両、14:マイクロ・コンピュータ、16:GPS信号受信機、24:受信機、26:電動車椅子(低速走行乗用移動車両)、30:GPS信号受信機、34:送信機、36:車路車間通信網、38:サーバ・コンピュータ
【技術分野】
【0001】
この発明は、車両の経路案内装置(カーナビゲーション装置)に関する。
【背景技術】
【0002】
従来より、車両に搭載されると共に、地図データ上において測位された現在位置から設定された目的地までの経路を案内するカーナビゲーション装置が広く知られている。例えば、下記特許文献1に記載のカーナビゲーション装置にあっては、目的地をメモリに登録し、モニタ画面上に目的地を表示すると共に、現在の自車位置から目的地への方向情報も表示することにより、現在の自車位置から見て目的地に至る距離や方向が一目瞭然で把握できるように構成している。
【0003】
一方、下記特許文献2に記載の電動車椅子のように、歩道や車道を走行できて高齢者などによる利用に最適な低速走行乗用移動車両が開発されている。
【特許文献1】特開平5−333768号公報
【特許文献2】特開2007−112363号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
低速走行乗用移動車両は低速であるとしても、高齢者が低速走行乗用移動車両に乗って自宅を出発した後に忘れ物を届けたい場合など、いち早く低速走行乗用移動車両に追い着くには別の車両に乗って追いかける必要がある。
【0005】
しかしながら、従来のカーナビゲーション装置にあっては、地図データ上の固定された任意の場所を目的地として設定する限りであり、低速走行乗用移動車両のような移動車両を目的地として設定することはできず、自車両を低速走行乗用移動車両まで経路案内することができなかった。また、何らかの方法によって低速走行乗用移動車両の現在位置を取得し、その現在位置を目的地として設定して経路案内するとしても、経路案内の最中に低速走行乗用移動車両が移動する可能性があり、到達目標である低速走行乗用移動車両まで適切に経路案内することができないといった問題があった。
【0006】
従って、この発明の目的は、上記した問題を解決し、車両を到達目標である低速走行乗用移動車両まで適切に経路案内することができるようにした車両の経路案内装置を提供することにある。
【課題を解決するための手段】
【0007】
上記の目的を解決するために、請求項1にあっては、車両に搭載されると共に、地図データ上において測位された前記車両の現在位置から設定された目的地までの経路を案内する車両の経路案内装置において、低速走行乗用移動車両から送信される前記低速走行乗用移動車両の位置情報を所定時間毎に受信する受信手段と、前記受信される位置情報に基づいて定められる低速走行乗用移動車両の位置を所定時間毎に前記目的地として設定する目的地設定手段と、を備える如く構成した。
【0008】
また、請求項2に係る車両の経路案内装置にあっては、さらに、前記低速走行乗用移動車両と通信自在に接続されると共に、ディスプレイを有するコンピュータ、を備え、前記コンピュータは、前記低速走行乗用移動車両から送信される低速走行乗用移動車両の位置情報を所定時間毎に入力すると共に、前記入力された位置情報に基づいて前記低速走行乗用移動車両の位置を前記ディスプレイに表示する如く構成した。
【発明の効果】
【0009】
請求項1にあっては、地図データ上において測位された車両の現在位置から設定された目的地までの経路を案内する車両の経路案内装置において、所定時間毎に低速走行乗用移動車両の位置情報を受信し、その位置情報に基づいて定められる低速走行乗用移動車両の位置を所定時間毎に目的地として設定する如く構成したので、車両を到達目標である低速走行乗用移動車両まで適切に経路案内することができる。
【0010】
請求項2に係る車両の経路案内装置にあっては、低速走行乗用移動車両と通信自在に接続されると共に、ディスプレイを有するコンピュータに、所定時間毎に低速走行乗用移動車両の位置情報を入力すると共に、その位置情報に基づいて低速走行乗用移動車両の位置をディスプレイに表示する如く構成したので、上記の効果に加え、コンピュータを低速走行乗用移動車両や車両にとって外部の例えば家庭内に設置することで、家庭内において低速走行乗用移動車両の位置を監視することができる。
【発明を実施するための最良の形態】
【0011】
以下、添付図面に即してこの発明に係る車両の経路案内装置を実施するための最良の形態について説明する。
【実施例1】
【0012】
図1は、この発明の実施例に係る車両の経路案内装置と低速走行乗用移動車両の相互関係を全体的に示すブロック図である。
【0013】
図1において、符号10はこの実施例に係る車両の経路案内装置を示す。経路案内装置10は、車両12に搭載されてその車両12の経路を案内する、いわゆるカーナビゲーション装置からなる。
【0014】
カーナビゲーション装置10は、データの演算処理を行うマイクロ・コンピュータ(「マイコン」と示す)14と、GPS(Global Positioning System)信号を受信するGPS信号受信機16と、経路案内用の地図データを格納する地図データベース18と、地図データベース18の地図データなどを表示するディスプレイ20と、音声によって経路案内するための音声出力装置22と、後述する低速走行乗用移動車両に関する情報を受信する受信機24とを備える。
【0015】
GPS信号受信機16は、車両12のダッシュボードなどの適宜な位置に配置されるアンテナ16aを介してGPS信号を受信する。受信されたGPS信号はマイクロ・コンピュータ14に送られ、マイクロ・コンピュータ14はGPS信号およびジャイロセンサ(図示せず)による加速度信号を用いた公知の自律航法に基づいて車両12の現在位置(経度、緯度、高度)を測位する。
【0016】
車両12の現在位置は、ディスプレイ20に地図データと共に表示される。また、予め設定(登録)された目的地も地図データ上に表示される。
【0017】
マイクロ・コンピュータ14は、地図データ上において車両12の現在位置から目的地までの経路を検索する。ここで検索される経路は、車両12の現在位置から目的地までの距離や時間に関しての最短経路(あるいは推奨経路)である。検索された経路も地図データ上に表示される。
【0018】
また、マイクロ・コンピュータ14は、車両12が検索された経路に沿って走行するように音声による経路案内、具体的には「100m先、右折です」などの音声を音声出力装置22を介して出力する。
【0019】
図1において符号26は、低速走行乗用移動車両を示す。
【0020】
図2はその低速走行乗用移動車両26の斜視図である。
【0021】
図2に示す如く、低速走行乗用移動車両26は、4個の車輪26a(図2において1個見えず)で支持された車体フレーム26bと、車体フレーム26b上に設けられ、図示しない操作者(乗員。ユーザ)が着座すべきシート26cと、操作者に手動操作自在に設けられた操作部26dとを備え、高齢者などの使用に適した、人が歩く速度と同じ程度の低速で走行する一人乗りの比較的小型な電動車、より正確には電動車椅子からなる。
【0022】
電動車椅子26のシート26cの下部には、車輪(正確には後輪)26aを駆動する電動モータ26eと、電動モータ26eなどに動作電力を供給するバッテリ26fが設置される。尚、電動モータ26eはDCブラシレスモータである。
【0023】
また、図1に示すように、電動車椅子26は、その走行を制御する電子制御ユニット(Electric Control Unit。「ECU」と示す)28と、前記したGPS信号受信機16と同様のGPS信号受信機30と、電動車椅子26の走行状態を検知する走行状態検知装置32と、電動車椅子26の各種情報を送信する送信機34とからなる制御ユニット26gを備える。
【0024】
GPS信号受信機30は、電動車椅子の適宜な位置に配置されるアンテナ30aを介してGPS信号を受信する。受信されたGPS信号はECU28に送られ、ECU28はGPS信号およびジャイロセンサ(図示せず)による加速度信号を用いた公知の自律航法に基づいて電動車椅子26の現在位置(経度、緯度、高度)を測位する。
【0025】
走行状態検知装置32によって検知された電動車椅子26の走行状態、具体的には車速やバッテリ残量もECU28に送られる。
【0026】
電動車椅子26の現在位置および走行状態に関する情報は送信機34を介して外部に送信される。具体的には、それら情報は送信機34のアンテナ34aから公知の車路車間通信網36に送信される。それら情報の送信は適宜な所定時間毎、ここでは例えば5秒毎に行われる。
【0027】
車路車間通信網36にはサーバ・コンピュータ38が備えられる。サーバ・コンピュータ38は電動車椅子26から送信されてきた情報を一時的に記憶すると共に、その情報を送信すべき相手方を特定した上で送信する。ここでは、前記したカーナビゲーション装置10の受信機24に向けて送信される。受信機24はアンテナ24aを介して所定時間毎、例えば5秒毎に電動車椅子26の情報を受信する。
【0028】
本発明の特徴は、カーナビゲーション装置10において、電動車椅子26から送信される位置情報を受信し、電動車椅子26の位置を目的地として随時設定し直して経路案内する点にある。以下、それについて説明する。
【0029】
図3は、カーナビゲーション装置10のマイクロ・コンピュータ14によって実行されるプログラムのフロー・チャートである。このプログラムは、カーナビゲーション装置10の電源がオンされることにより開始される。
【0030】
S10において、受信機24によって受信された電動車椅子26の位置情報を入力する。次いでS12に進み、電動車椅子26の位置情報に基づいて地図データ上に電動車椅子26の位置を特定すると共に、特定した電動車椅子26の位置を目的地として設定する。
【0031】
次いでS14に進み、車両12の現在位置から設定された目的地までの経路を検索する。次いでS16に進み、検索した経路をディスプレイ20に表示すると共に、音声による経路案内を開始する。次いでS18に進み、車両12と目的地の距離が所定値未満であるか、換言すれば、車両12が目的地に到達したか判断する。ここで所定値は、50mなど適宜な値に設定される。
【0032】
S18で否定されるとき、S20に進んで所定時間のタイマカウントを行う。ここで所定時間は例えば30秒に設定される。S20で所定時間が経過したと判断されるとき、S10に戻る。
【0033】
S10においては、新たな電動車椅子26の位置情報を入力し、続くS12ではその位置情報に基づいて新たな電動車椅子26の位置を目的地として設定する。続くS14では、車両12の現在位置から新たに設定された目的地までの経路を検索する。次いで、S16に進み、新たに検索された経路に応じて経路案内が行われる。続くS18において否定される限り、S10からS20までの処理が繰り返される。一方、S18で肯定されるとき、即ち車両12が目的地たる電動車椅子26に到達したと判断されるとき、経路案内を終了する。
【0034】
図4は、図3のフロー・チャートのプログラム処理によってディスプレイ20に表示される経路についての説明図である。
【0035】
ある時間において車両12がA地点にいるとき、電動車椅子26がa地点にいると特定されたとすると、a地点を目的地として設定し、A地点からa地点までの最短の経路X(実線)が検索される。車両12は経路Xに沿って進み、所定時間(例えば30秒)後、B地点に到達する。このとき、電動車椅子26がa地点から移動してb地点にいると特定されたとすると、b地点を目的地として設定し直し、B地点からb地点までの最短の経路Y(一点破線)が検索される。これにより、車両12は新たな経路Yに沿って進むことになり、所定時間(例えば30秒)後、C地点に到達する。このとき、電動車椅子26がb地点から移動してc地点にいると特定されたとすると、c地点を目的地として設定し直し、C地点からc地点までの最短の経路Z(破線)が検索される。その後、車両12は新たな経路Zに沿って進み、電動車椅子26まで到達すると、経路案内は終了する。
【0036】
このように、この発明の第1実施例に係るカーナビゲーション装置10にあっては、所定時間毎に受信される電動車椅子26の位置情報に基づいて特定される電動車椅子26の位置を所定時間毎に目的地として設定し直して経路案内するように構成したので、車両12を到達目標である電動車椅子26まで適切に経路案内することができる。
【実施例2】
【0037】
次いで、この発明の第2実施例に係る車両の経路案内装置(カーナビゲーション装置)について説明する。
【0038】
第2実施例にあっては、第1実施例に係る車両の経路案内装置(カーナビゲーション装置)10に対し、さらに、図1の想像線で囲まれた部分において示すように、電動車椅子26と通信自在に接続されるパーソナル・コンピュータ(「PC」と示す)40を備えるように構成した。
【0039】
パーソナル・コンピュータ40は電動車椅子26や車両12にとって外部である、例えば電動車椅子26の所有者の家庭内に設置される。パーソナル・コンピュータ40はインターネット回線42に接続するための通信機40aと、出力を表示するディスプレイ40bとを備える。
【0040】
前記したサーバ・コンピュータ38もインターネット回線42に接続されており、サーバ・コンピュータ38は電動車椅子26から送信される位置情報および走行状態に関する情報をパーソナル・コンピュータ40にも送信する。
【0041】
パーソナル・コンピュータ40は、サーバ・コンピュータ38から送信されてくる電動車椅子26の位置情報を所定時間毎、ここでは例えば5秒毎に入力し、予めインストールされている電子地図ソフトウェアと連動させて、電動車椅子26の位置をディスプレイ40b上に表示する。
【0042】
このように、この発明の第2実施例にあっては、所定時間毎に電動車椅子26の位置情報を家庭内のパーソナル・コンピュータ40に入力すると共に、その位置情報に基づいて電動車椅子26の位置をディスプレイ40bに表示するように構成したので、家庭内において電動車椅子26の位置を監視することができる。
【0043】
以上のように、この発明の第1実施例および第2実施例にあっては、車両(12)に搭載されると共に、地図データ上において測位された前記車両の現在位置から設定された目的地までの経路を案内する車両の経路案内装置(カーナビゲーション装置10)において、低速走行乗用移動車両(電動車椅子26)から送信される前記低速走行乗用移動車両の位置情報を所定時間(5秒)毎に受信する受信手段(受信機24)と、前記受信される位置情報に基づいて定められる低速走行乗用移動車両の位置を所定時間(30秒)毎に前記目的地として設定する目的地設定手段(マイクロ・コンピュータ14、S12)と、を備える如く構成した。
【0044】
また、第2実施例にあっては、さらに、前記低速走行乗用移動車両(電動車椅子26)と通信自在に接続されると共に、ディスプレイ(40b)を有するコンピュータ(パーソナル・コンピュータ40)、を備え、前記コンピュータは、前記低速走行乗用移動車両から送信される低速走行乗用移動車両の位置情報を所定時間毎に入力すると共に、前記入力された位置情報に基づいて前記低速走行乗用移動車両の位置を前記ディスプレイに表示する如く構成した。
【0045】
尚、S14の経路検索の処理は数秒程度の時間を要するという点に鑑み、S10において電動車椅子26の走行状態(特に、車速)に関する情報も入力し、S12において電動車椅子26の位置情報および走行状態に関する情報に基づいて数秒先の電動車椅子26の位置を予測して特定すると共に、予測の電動車椅子26の位置を目的地として設定するようにしても良い。
【0046】
また、S10において電動車椅子26の情報を30秒毎に入力するが、電動車椅子26からは5秒毎に情報が送信されることから、30秒の間に送信される6回分の情報を適宜なメモリに記憶すると共に、それら6回分の情報に基づいて電動車椅子26の移動位置を予測して特定し、その予測位置を目的地として設定するようにしても良い。
【0047】
また、上記において車路車間通信網36を利用するように構成したが、電動車椅子26と車両12との間で直接的に通信する車車間通信であっても良い。
【0048】
また、上記における電動車椅子は低速走行乗用移動車両の一例であり、電動式あるいは車椅子に限られるものではない。
【図面の簡単な説明】
【0049】
【図1】この発明の実施例に係る車両の経路案内装置(カーナビゲーション装置)と低速走行乗用移動車両の相互関係を全体的に示すブロック図である。
【図2】図1に示す低速走行乗用移動車両の斜視図である。
【図3】図1の経路案内装置(カーナビゲーション装置)のマイクロ・コンピュータによって実行されるプログラムのフロー・チャートである。
【図4】図2のフロー・チャートのプログラム処理によってディスプレイに表示される経路についての説明図である。
【符号の説明】
【0050】
10:カーナビゲーション装置(経路案内装置)、12:車両、14:マイクロ・コンピュータ、16:GPS信号受信機、24:受信機、26:電動車椅子(低速走行乗用移動車両)、30:GPS信号受信機、34:送信機、36:車路車間通信網、38:サーバ・コンピュータ
【特許請求の範囲】
【請求項1】
車両に搭載されると共に、地図データ上において測位された前記車両の現在位置から設定された目的地までの経路を案内する車両の経路案内装置において、
a.低速走行乗用移動車両から送信される前記低速走行乗用移動車両の位置情報を所定時間毎に受信する受信手段と、
b.前記受信される位置情報に基づいて定められる低速走行乗用移動車両の位置を所定時間毎に前記目的地として設定する目的地設定手段と、
を備えることを特徴とする車両の経路案内装置。
【請求項2】
さらに、
c.前記低速走行乗用移動車両と通信自在に接続されると共に、ディスプレイを有するコンピュータ、
を備え、前記コンピュータは、前記低速走行乗用移動車両から送信される低速走行乗用移動車両の位置情報を所定時間毎に入力すると共に、前記入力された位置情報に基づいて前記低速走行乗用移動車両の位置を前記ディスプレイに表示することを特徴とする請求項1記載の車両の経路案内装置。
【請求項1】
車両に搭載されると共に、地図データ上において測位された前記車両の現在位置から設定された目的地までの経路を案内する車両の経路案内装置において、
a.低速走行乗用移動車両から送信される前記低速走行乗用移動車両の位置情報を所定時間毎に受信する受信手段と、
b.前記受信される位置情報に基づいて定められる低速走行乗用移動車両の位置を所定時間毎に前記目的地として設定する目的地設定手段と、
を備えることを特徴とする車両の経路案内装置。
【請求項2】
さらに、
c.前記低速走行乗用移動車両と通信自在に接続されると共に、ディスプレイを有するコンピュータ、
を備え、前記コンピュータは、前記低速走行乗用移動車両から送信される低速走行乗用移動車両の位置情報を所定時間毎に入力すると共に、前記入力された位置情報に基づいて前記低速走行乗用移動車両の位置を前記ディスプレイに表示することを特徴とする請求項1記載の車両の経路案内装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2010−117325(P2010−117325A)
【公開日】平成22年5月27日(2010.5.27)
【国際特許分類】
【出願番号】特願2008−292613(P2008−292613)
【出願日】平成20年11月14日(2008.11.14)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
【公開日】平成22年5月27日(2010.5.27)
【国際特許分類】
【出願日】平成20年11月14日(2008.11.14)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
[ Back to top ]