
車両の経路追跡システム及び方法
前車軸及び後車軸の各車輪(6、9)に瞬間速度センサを含む自動車車両(1)の経路追跡システム。本発明によれば、システムは、同じ車軸(Aav及びAar)の車輪間の速度偏差を計算する手段(200及び201)と、各車軸の速度偏差間の差を計算する手段(202)と、この差を記憶された閾値(ε)と比較する手段(203)とを含む。本発明は、次の:各前車軸及び後車軸(Aav及びAar)の車輪の速度偏差を計算するステップと、各前車軸及び後車軸(Aav及びAar)間の速度偏差の差を計算するステップと、速度偏差の差を記憶された閾値(ε)と比較するステップとを含む自動車車両の経路追跡方法にも関する。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自動車車両の経路追跡の分野に関し、とりわけ車両がアンダステアする時に経路を維持及び修正するシステム及び方法に関する。
【0002】
本発明は、自動車車両が方向転換中であり、かつ利用者の側から駆動トルクの要求がある時に、自動車車両の経路追跡に応用される。
【背景技術】
【0003】
方向転換の際に、前車軸に対するトルクの要求があれば、前輪駆動車両は、アンダステアする、すなわちその回転半径が、ルートによって画定されるカーブよりも大きい傾向がある。車両が前進する場合に、車両がオーバステアする傾向がある。
【0004】
車両の偏揺れ速度、横方向加速、ドリフトのような幾つかの物理量を観察して、自動車車両の経路を制御することが知られている。これらの物理量は、ジャイロスコープ及び/又は加速度センサによって測定される。測定値は、運転者の意思を表す車両モデルと比較される。比較に応じて、システムは、この偏差を減少させるために設定点を決定する。設定点は、各車輪に取り付けられる独立した電動機、操縦される差動装置又はブレーキのような1つ以上の車輪に対する抗力の変動を発生させ得る要素に対して適用される。
【0005】
そのため、特許文献1は、自動車車両を安定させる方法を記載している。この方法は、アンダステアのインジケータを計算するステップを含み、計算は、設定偏揺れと、車両の測定された偏揺れとの比に基づく。設定偏揺れは、車両のジオメトリ、回転角、及び車両の速度に応じて決まる。
【0006】
特許文献2は、自動車車両の経路偏差を減少させる方法を記載する。この方法は、舵取り角センサ、横加速度を測定する加速度計、各車輪の速度センサ、及び偏揺れ角を評価することを可能にする適切な回転センサからのデータ収集による誤差を評価するステップを含む。この文献において、この方法が、計算の点で非常に面倒なこと、及び強力な計算機か、このタスクのみに充てられる計算機を備えることが妥当であると記載されている。
【0007】
提示した文献の短所は、経路偏差を決定するために必要な時間、及び調整の困難さである。なぜならば調整は、所与の瞬間での車両に固有のパラメータ(空気タイヤ、積荷、重心の位置)によって決まるからである。これらの短所は、経路偏差を非常に激しく減少させるシステムを作用させることを強いる、誤差範囲をもたらす。これらの文献を読むと明らかになる短所は、主にモデルの管理による面倒な計算、及び専用の計算機のメモリ管理である。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】仏国特許出願公開第2893294号明細書
【特許文献2】仏国特許出願公開第2845656号明細書
【発明の概要】
【0009】
以上のことに鑑みて、本発明の目的は、加速下の経路偏差を迅速に検出し、それによって、運転者をできるだけ混乱させないために、偏差を迅速に修正できることである。
【0010】
もう1つの目的は、運転者の意思に正確に従って設定点を適用できることである。
【0011】
これらの目的を達成するために、前車軸及び後車軸の各車輪に瞬間速度センサを含む自動車車両の経路追跡システムが提案される。このシステムは、同じ車軸の車輪間の速度偏差を計算する手段と、各車軸の速度偏差間の差を計算する手段と、この差を記憶された閾値と比較する手段とを含む。
【0012】
このことにより、車両の経路偏差を迅速に検出することが可能である。
【0013】
好適には、閾値は、車両の経路偏差を効果的に決定するために、車両速度及びステアリングホイール角度のマッピングのために決定できる。
【0014】
変形形態によれば、システムは、後車軸の車輪の速度偏差に応じて、又は車両のステアリングホイール角度の測定符号に応じて車両の経路を決定する手段を含むことができる。
【0015】
特定の実施形態において、システムは、車両のステアリングホイール角度を測定する手段と、駆動トルクを測定する手段と、修正設定点を決定する手段と、設定点を適用する手段と含むことができ、前記手段は、車両のステアリングホイール角度、及びトルクの測定値がある値を超える時に、設定点を適用することが可能である。このことは、経路及び運転者が望む出力に設定点を適応させる利点を示す。
【0016】
システムは、経路内側の前輪に対して修正設定点を適用できる修正設定点を適用する手段を含むことができる。
【0017】
もう1つの形態によれば、
− 各前車軸及び後車軸の車輪の速度偏差を計算するステップと、
− 各前車軸及び後車軸間の速度偏差の差を計算するステップと、
− 速度偏差の差を記憶された閾値と比較するステップとを含む車両の経路追跡方法も提案される。
【0018】
一実施形態において、方法は、車両のステアリングホイール角度、及び駆動トルクを測定するのに応じて適用すべき設定点を決定するステップを含むことができる。
【0019】
変形形態において、方法は、後車軸の車輪の速度偏差に応じて、又は車両のステアリングホイール角度の符号に応じて車両の経路を決定するステップを含むことができる。
【0020】
一変形形態によれば、方法は、経路内側の前輪に対して修正設定点を適用するステップを含むことができる。
【0021】
本発明の他の特徴及び利点は、以下に続く詳細な説明、非限定的な例を読めば明らかとなるであろう。理解のために以下の図面を参照されたい。
【図面の簡単な説明】
【0022】
【図1】本発明による車両の概略図である。
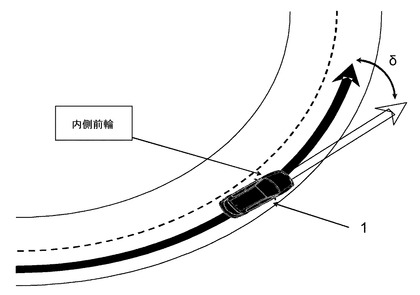
【図2】左カーブにおいてアンダステアする車両の概略図である。
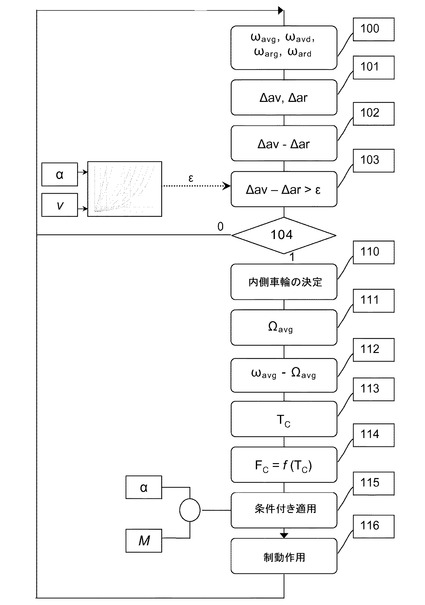
【図3】左カーブにおいて経路偏差を検出及び修正する方法の主たるステップの概略図である。
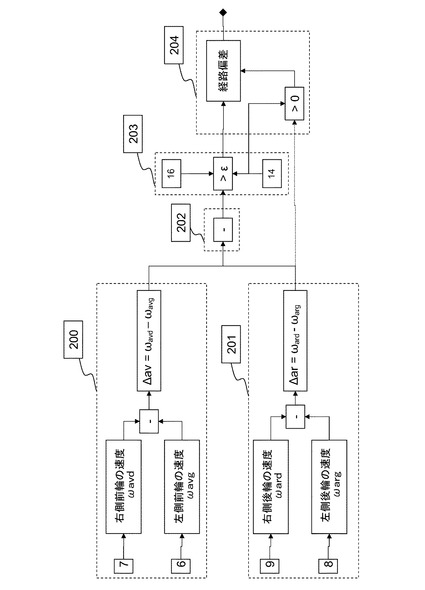
【図4】経路追跡システムの概略図である。
【図5】左カーブにおいて車両の経路偏差を修正する際の経路追跡システムの概略図である。
【発明を実施するための形態】
【0023】
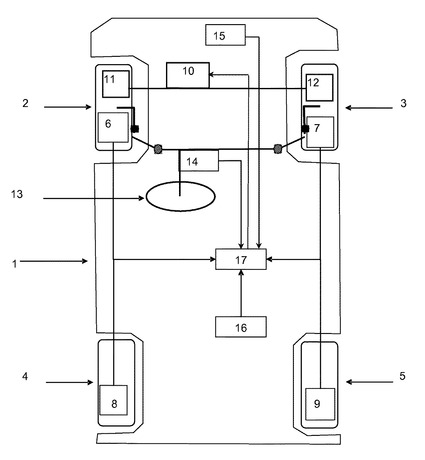
図1を参照すると、エンジン(図示せず)によって駆動される自動車車両1は、4つの車輪2〜5(左側前輪2、右側前輪3、左側後輪4、及び右側後輪5)を含む。各車輪2〜5は、車輪2〜5の速度ωavg、ωavd、ωarg及びωardを測定することを可能にする、瞬間速度センサ6〜9をそれぞれ備える。
【0024】
制動装置10は、左側11及び右側12フロントブレーキキャリパにおいて異なる制動圧力を発生させることが可能であり、この制動装置10は、例えばESC(電子安定制御)アクチュエータ型の装置であっても良い。その上、ESC装置は、車輪に瞬間速度センサを含むという利点を有する。
【0025】
車両1は、前輪2及び3を方向付けることを可能にする方向制御装置に作用するステアリングホイール13を含む。ステアリングホイール13は、ステアリングホイール13の角度aを測定することを可能にするステアリングホイール13の角度センサ14を備える。
【0026】
車両1は、駆動トルクMを測定することを可能にする駆動トルクセンサ15と、車両1の速度vを測定する車両1の速度センサ16とを同様に含む。
【0027】
車両1は、様々な装置を検査及び制御することを可能にする計算機17を備える。計算機17は、例えば速度センサ6〜9、駆動トルクセンサ15、及びステアリングホイール13の角度センサ14に由来する情報を接続によって受けることができる。計算機17は、制動装置10を制御することもできる。計算機17は、その上車両1の経路を制御する方法を実施することを可能にする。
【0028】
図3に示すように、方法は、ωavg、ωavd、ωarg及びωardと指標付けされた速度センサ6〜9からの信号を取得するステップ100を含む。方法は、前車軸Aav及び後車軸Aarの車輪の速度偏差を計算するステップ101を同様に含む。換言すると、ステップ101は、次式(1)及び(2):
前車軸Aav=(ωavd−ωavg) (1)
及び後車軸Aar=(ωard−ωarg) (2)
に従って速度偏差を計算することを可能にする。
【0029】
次にステップ102は、次式(3):
(ωavd−ωavg)−(ωard−ωarg) (3)
に従って前車軸Aavの車輪の速度偏差と、後車軸Aarの車輪の速度偏差との差を計算することを可能にする。
【0030】
次のステップ103は、ステップ102の計算結果と記憶された閾値εとを比較することを可能にする。閾値εは、示された例において、車両1のステアリングホイール13の角度a及び駆動トルク15(図中の点線)のマッピングのために決定できる。
【0031】
車両1の経路を診断するステップ104は、ステップ103の結果を考慮する。(ωavd−ωavg)−(ωard−ωarg)<εの場合に、方法は、経路偏差を検出せず、比較器の出力で値0を送信し、それにより、方法はステップ100から反復される。反対の場合、すなわち図2に示すように経路偏差δに相当する、(ωavd−ωavg)−(ωard−ωarg)>εの場合に、方法は、経路偏差を検出し、比較器の出力で値1を送信し、それにより、ステップ110による方法の遂行が生じる。
【0032】
ステップ110は、前輪2又は3のいずれが経路内側の前輪であるかを、車両の経路修正のために、結合されたブレーキキャリパを制御する目的で決定することを可能にする。内側前輪2又は3は、車両1のカーブに対して経路内側の前輪であり、換言すると、内側前輪は、カーブにおいて最短距離を走行する前輪である。内側前輪2又は3は、後車軸Aarの車輪の速度偏差の代数値によって決定される。変形形態によれば、内側前輪2又は3は、ステアリングホイール13の角度aの値によって決定できる。
【0033】
図2に例示した例において、内側前輪は、図1に例示された左側前輪2であり、本明細書において以下で、図2に表した事例を検討する。
【0034】
ステップ111は、車両1の経路偏差を減少させるために内側前輪の設定速度Ωavgを計算することを可能にする。修正は、前車軸Aavの車輪及び後車軸Aarの車輪の同じ速度差を有することを目的とする。この等しさから開始して、設定速度を内側前輪2又は3によって割り出すことができる。図2に示した事例において、内側前輪2での速度は、式(4):
Aav=Aar、式(1)及び(2)参照。
ωavd−Ωavg=ωard−ωarg
favg=ωavd−(ωard−ωarg) (4)
によって得られる。
【0035】
ステップ112は、設定速度Ωavgを、内側前輪の瞬間速度ωavgと比較することを可能にする。比較手段は、図2に示した実施形態でのように、設定速度Ωavgと、車輪の瞬間速度ωavgとの間の差であっても良いが、これらの速度の比であっても良かったであろう。
【0036】
示した実施形態において、方法は、左側前輪の速度ωavgが設定速度Ωavgに到達するために、適用せねばならない速度Tcの修正値を計算するステップ113を含む。与えるべき速度Tcの修正は、例えば比例積分計算によって計算できる。
【0037】
ステップ114は、次式(5):
Fc=f(Tc) (5)
に従って、速度Tcの修正に応じて左側前輪2のブレーキキャリパに対してシステム10によって適用される設定点Fcの値を計算することを可能にする。
【0038】
ステップ115は、ステアリングホイール13の角度a及び駆動トルクMのような幾つかの値に応じた設定点の条件付き適用を可能にする。
【0039】
ステップ116は、左側前輪2のブレーキキャリパのためにステップ114で計算した設定点Fcの値に関して制動システム10を制御することを可能にする。
【0040】
図2に示した例によれば、左側前輪にブレーキがかけられ、それにより、アンダステアを妨げるように車輪速度が減少する。
【0041】
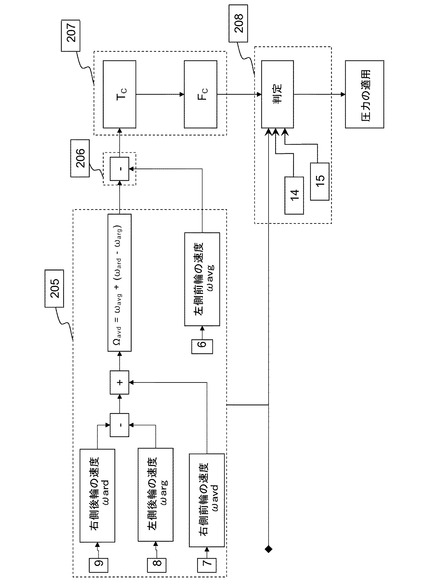
右カーブにおいて経路偏差を有する場合に、内側前輪は、右側前輪3であったであろう。図3に示す方法には、変更がないが、ステップ111の式(4)は、文字が異なることに注意すべきである。右側前輪3の設定速度は、式(6):
Ωavd=Wavg+(Ward−ωarg) (6)
によって得られる。
【0042】
設定点は、前輪の速度を操縦することを可能にするシステムによって適用される。これらのシステムは、網羅的でないが、操縦される差動装置、ブレーキ及び独立エンジンである。設定点は、ブレーキの作用によって、又は独立エンジン及び操縦される差動装置の場合にこの車輪に対して伝達されるトルクを減少させて、内側前輪の速度を結局低下させることになる。
【0043】
図4に示すように、システムの計算機は、速度センサ6及び7によって送信される信号から前車軸Aavの車輪の速度差を計算する第1手段200を含む。速度センサ8及び9によって送信される信号から後車軸Aarの車輪の速度差を計算する第2手段201。
【0044】
式(1)及び(2)によって与えられる各車軸Aav及びAarの速度偏差間の差を計算する第3手段202、この第3計算手段202の後には、この差を記憶された閾値εと比較する手段203が続く。閾値εは、示した実施形態によれば、舵取り角センサ14によって送信されるステアリングホイールの角度a及びトルクセンサ16によって送信される駆動トルクMによって決定される。
【0045】
第4計算手段204は、第3比較手段203の結果により、経路偏差があるかを決定することを可能にする。第4手段204は、経路偏差の場合に、いずれの前輪が車両1によって画定されるカーブ内側の前輪であるか決定することを可能にする。第4手段204は、舵取り角aから、又は図中、点線の後車軸Aarの車輪の速度差から内側前輪を決定する。第4手段204が、車両1の経路偏差を決定するならば、その場合第4手段204は、図5に示す内側前輪の設定速度を計算する第5手段205を始動させる。
【0046】
図2に示す例において、内側前輪は、左側前輪である。設定速度を計算する第5手段205は、左側前輪の設定速度Ωavgを計算するために、後輪Aarの速度差を考慮に入れ、かつ右側前輪の速度ωavdを考慮に入れる。式(6)を参照されたい。
【0047】
左側前輪の設定速度Ωavgを、左側前輪の瞬間速度ωavgと比較する第6手段206、この比較は、示した例によれば、これら2つの速度間の差であり得る。
【0048】
次に第7手段207は、到達すべき設定速度Ωavgと、この同じ車輪の瞬間速度ωavgとの間の差から、例えば比例積分計算によって、適用すべき内側前輪の速度Tcを修正する設定点を計算することを可能にする。この速度Tcの設定点は、示した実施形態によれば、左側前輪のブレーキキャリパによって適用される圧力を介して設定速度Ωavgと、瞬間速度ωavgとの間の偏差を低下させることを目的とする。第7手段207は、速度Tcを修正する設定点から、示した例によれば左側前輪のブレーキキャリパに対して制動装置10によって適用する圧力Fcの設定点を計算することを可能にする。
【0049】
示した実施形態によれば、経路追跡システムは、幾つかのパラメータが、ある値を超す場合に圧力設定点を適用する第8手段208を含む。これらのパラメータは、示した事例において、角度センサ14に由来する舵取り角a、トルクセンサ15に由来する駆動トルクM、及び手段204に由来する車両の経路偏差であっても良い。特にパラメータとして経路偏差の値を取ることは、システムの時宜を得ない修正を抑えることを可能にする。
【0050】
示した実施形態において、設定速度は、内側前輪に対してブレーキキャリパを作動させる従来の制動装置により到達される。
【0051】
もう1つの実施形態によれば、車輪の速度は、従来の制動装置でなく、例えば駆動トルクを駆動輪に対して配分する操縦される差動装置、各駆動輪に必要な機械エネルギーを供給する個別のエンジン、又は車輪の速度を制御することを可能にする他のあらゆる手段によって制御され得る。
【0052】
システムは、本発明により提案される解決策と同じ性能を確保するようである。機械差動装置、ブレーキによる機械差動装置のシミュレーション、経路検査(ESC)のアンダステアの検査に言及することができる。本発明の解決策は、ESCのアンダステアを検査するこれらのシステムと、本発明の方法が予防的に作用することにおいて異なる。記載された本発明は、このアンダステア段階に到達する前に介在し、従って経路検査システムESCの介在を抑えることになる。本発明は、経路偏差の迅速な検出を可能にすることを主要な利点とする。
【0053】
記載された本発明のもう1つの利点は、漸進的に、かつ運転者に混乱を与えないように作用することであり、他方で経路検査は、アンダステアを遅くし、かつ低下させるように、エンジンを切り、かつ車両を強く制動する。この利点は、後輪の速度により、内側前輪に対して速度設定点を適用することから生じる。
【技術分野】
【0001】
本発明は、自動車車両の経路追跡の分野に関し、とりわけ車両がアンダステアする時に経路を維持及び修正するシステム及び方法に関する。
【0002】
本発明は、自動車車両が方向転換中であり、かつ利用者の側から駆動トルクの要求がある時に、自動車車両の経路追跡に応用される。
【背景技術】
【0003】
方向転換の際に、前車軸に対するトルクの要求があれば、前輪駆動車両は、アンダステアする、すなわちその回転半径が、ルートによって画定されるカーブよりも大きい傾向がある。車両が前進する場合に、車両がオーバステアする傾向がある。
【0004】
車両の偏揺れ速度、横方向加速、ドリフトのような幾つかの物理量を観察して、自動車車両の経路を制御することが知られている。これらの物理量は、ジャイロスコープ及び/又は加速度センサによって測定される。測定値は、運転者の意思を表す車両モデルと比較される。比較に応じて、システムは、この偏差を減少させるために設定点を決定する。設定点は、各車輪に取り付けられる独立した電動機、操縦される差動装置又はブレーキのような1つ以上の車輪に対する抗力の変動を発生させ得る要素に対して適用される。
【0005】
そのため、特許文献1は、自動車車両を安定させる方法を記載している。この方法は、アンダステアのインジケータを計算するステップを含み、計算は、設定偏揺れと、車両の測定された偏揺れとの比に基づく。設定偏揺れは、車両のジオメトリ、回転角、及び車両の速度に応じて決まる。
【0006】
特許文献2は、自動車車両の経路偏差を減少させる方法を記載する。この方法は、舵取り角センサ、横加速度を測定する加速度計、各車輪の速度センサ、及び偏揺れ角を評価することを可能にする適切な回転センサからのデータ収集による誤差を評価するステップを含む。この文献において、この方法が、計算の点で非常に面倒なこと、及び強力な計算機か、このタスクのみに充てられる計算機を備えることが妥当であると記載されている。
【0007】
提示した文献の短所は、経路偏差を決定するために必要な時間、及び調整の困難さである。なぜならば調整は、所与の瞬間での車両に固有のパラメータ(空気タイヤ、積荷、重心の位置)によって決まるからである。これらの短所は、経路偏差を非常に激しく減少させるシステムを作用させることを強いる、誤差範囲をもたらす。これらの文献を読むと明らかになる短所は、主にモデルの管理による面倒な計算、及び専用の計算機のメモリ管理である。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】仏国特許出願公開第2893294号明細書
【特許文献2】仏国特許出願公開第2845656号明細書
【発明の概要】
【0009】
以上のことに鑑みて、本発明の目的は、加速下の経路偏差を迅速に検出し、それによって、運転者をできるだけ混乱させないために、偏差を迅速に修正できることである。
【0010】
もう1つの目的は、運転者の意思に正確に従って設定点を適用できることである。
【0011】
これらの目的を達成するために、前車軸及び後車軸の各車輪に瞬間速度センサを含む自動車車両の経路追跡システムが提案される。このシステムは、同じ車軸の車輪間の速度偏差を計算する手段と、各車軸の速度偏差間の差を計算する手段と、この差を記憶された閾値と比較する手段とを含む。
【0012】
このことにより、車両の経路偏差を迅速に検出することが可能である。
【0013】
好適には、閾値は、車両の経路偏差を効果的に決定するために、車両速度及びステアリングホイール角度のマッピングのために決定できる。
【0014】
変形形態によれば、システムは、後車軸の車輪の速度偏差に応じて、又は車両のステアリングホイール角度の測定符号に応じて車両の経路を決定する手段を含むことができる。
【0015】
特定の実施形態において、システムは、車両のステアリングホイール角度を測定する手段と、駆動トルクを測定する手段と、修正設定点を決定する手段と、設定点を適用する手段と含むことができ、前記手段は、車両のステアリングホイール角度、及びトルクの測定値がある値を超える時に、設定点を適用することが可能である。このことは、経路及び運転者が望む出力に設定点を適応させる利点を示す。
【0016】
システムは、経路内側の前輪に対して修正設定点を適用できる修正設定点を適用する手段を含むことができる。
【0017】
もう1つの形態によれば、
− 各前車軸及び後車軸の車輪の速度偏差を計算するステップと、
− 各前車軸及び後車軸間の速度偏差の差を計算するステップと、
− 速度偏差の差を記憶された閾値と比較するステップとを含む車両の経路追跡方法も提案される。
【0018】
一実施形態において、方法は、車両のステアリングホイール角度、及び駆動トルクを測定するのに応じて適用すべき設定点を決定するステップを含むことができる。
【0019】
変形形態において、方法は、後車軸の車輪の速度偏差に応じて、又は車両のステアリングホイール角度の符号に応じて車両の経路を決定するステップを含むことができる。
【0020】
一変形形態によれば、方法は、経路内側の前輪に対して修正設定点を適用するステップを含むことができる。
【0021】
本発明の他の特徴及び利点は、以下に続く詳細な説明、非限定的な例を読めば明らかとなるであろう。理解のために以下の図面を参照されたい。
【図面の簡単な説明】
【0022】
【図1】本発明による車両の概略図である。
【図2】左カーブにおいてアンダステアする車両の概略図である。
【図3】左カーブにおいて経路偏差を検出及び修正する方法の主たるステップの概略図である。
【図4】経路追跡システムの概略図である。
【図5】左カーブにおいて車両の経路偏差を修正する際の経路追跡システムの概略図である。
【発明を実施するための形態】
【0023】
図1を参照すると、エンジン(図示せず)によって駆動される自動車車両1は、4つの車輪2〜5(左側前輪2、右側前輪3、左側後輪4、及び右側後輪5)を含む。各車輪2〜5は、車輪2〜5の速度ωavg、ωavd、ωarg及びωardを測定することを可能にする、瞬間速度センサ6〜9をそれぞれ備える。
【0024】
制動装置10は、左側11及び右側12フロントブレーキキャリパにおいて異なる制動圧力を発生させることが可能であり、この制動装置10は、例えばESC(電子安定制御)アクチュエータ型の装置であっても良い。その上、ESC装置は、車輪に瞬間速度センサを含むという利点を有する。
【0025】
車両1は、前輪2及び3を方向付けることを可能にする方向制御装置に作用するステアリングホイール13を含む。ステアリングホイール13は、ステアリングホイール13の角度aを測定することを可能にするステアリングホイール13の角度センサ14を備える。
【0026】
車両1は、駆動トルクMを測定することを可能にする駆動トルクセンサ15と、車両1の速度vを測定する車両1の速度センサ16とを同様に含む。
【0027】
車両1は、様々な装置を検査及び制御することを可能にする計算機17を備える。計算機17は、例えば速度センサ6〜9、駆動トルクセンサ15、及びステアリングホイール13の角度センサ14に由来する情報を接続によって受けることができる。計算機17は、制動装置10を制御することもできる。計算機17は、その上車両1の経路を制御する方法を実施することを可能にする。
【0028】
図3に示すように、方法は、ωavg、ωavd、ωarg及びωardと指標付けされた速度センサ6〜9からの信号を取得するステップ100を含む。方法は、前車軸Aav及び後車軸Aarの車輪の速度偏差を計算するステップ101を同様に含む。換言すると、ステップ101は、次式(1)及び(2):
前車軸Aav=(ωavd−ωavg) (1)
及び後車軸Aar=(ωard−ωarg) (2)
に従って速度偏差を計算することを可能にする。
【0029】
次にステップ102は、次式(3):
(ωavd−ωavg)−(ωard−ωarg) (3)
に従って前車軸Aavの車輪の速度偏差と、後車軸Aarの車輪の速度偏差との差を計算することを可能にする。
【0030】
次のステップ103は、ステップ102の計算結果と記憶された閾値εとを比較することを可能にする。閾値εは、示された例において、車両1のステアリングホイール13の角度a及び駆動トルク15(図中の点線)のマッピングのために決定できる。
【0031】
車両1の経路を診断するステップ104は、ステップ103の結果を考慮する。(ωavd−ωavg)−(ωard−ωarg)<εの場合に、方法は、経路偏差を検出せず、比較器の出力で値0を送信し、それにより、方法はステップ100から反復される。反対の場合、すなわち図2に示すように経路偏差δに相当する、(ωavd−ωavg)−(ωard−ωarg)>εの場合に、方法は、経路偏差を検出し、比較器の出力で値1を送信し、それにより、ステップ110による方法の遂行が生じる。
【0032】
ステップ110は、前輪2又は3のいずれが経路内側の前輪であるかを、車両の経路修正のために、結合されたブレーキキャリパを制御する目的で決定することを可能にする。内側前輪2又は3は、車両1のカーブに対して経路内側の前輪であり、換言すると、内側前輪は、カーブにおいて最短距離を走行する前輪である。内側前輪2又は3は、後車軸Aarの車輪の速度偏差の代数値によって決定される。変形形態によれば、内側前輪2又は3は、ステアリングホイール13の角度aの値によって決定できる。
【0033】
図2に例示した例において、内側前輪は、図1に例示された左側前輪2であり、本明細書において以下で、図2に表した事例を検討する。
【0034】
ステップ111は、車両1の経路偏差を減少させるために内側前輪の設定速度Ωavgを計算することを可能にする。修正は、前車軸Aavの車輪及び後車軸Aarの車輪の同じ速度差を有することを目的とする。この等しさから開始して、設定速度を内側前輪2又は3によって割り出すことができる。図2に示した事例において、内側前輪2での速度は、式(4):
Aav=Aar、式(1)及び(2)参照。
ωavd−Ωavg=ωard−ωarg
favg=ωavd−(ωard−ωarg) (4)
によって得られる。
【0035】
ステップ112は、設定速度Ωavgを、内側前輪の瞬間速度ωavgと比較することを可能にする。比較手段は、図2に示した実施形態でのように、設定速度Ωavgと、車輪の瞬間速度ωavgとの間の差であっても良いが、これらの速度の比であっても良かったであろう。
【0036】
示した実施形態において、方法は、左側前輪の速度ωavgが設定速度Ωavgに到達するために、適用せねばならない速度Tcの修正値を計算するステップ113を含む。与えるべき速度Tcの修正は、例えば比例積分計算によって計算できる。
【0037】
ステップ114は、次式(5):
Fc=f(Tc) (5)
に従って、速度Tcの修正に応じて左側前輪2のブレーキキャリパに対してシステム10によって適用される設定点Fcの値を計算することを可能にする。
【0038】
ステップ115は、ステアリングホイール13の角度a及び駆動トルクMのような幾つかの値に応じた設定点の条件付き適用を可能にする。
【0039】
ステップ116は、左側前輪2のブレーキキャリパのためにステップ114で計算した設定点Fcの値に関して制動システム10を制御することを可能にする。
【0040】
図2に示した例によれば、左側前輪にブレーキがかけられ、それにより、アンダステアを妨げるように車輪速度が減少する。
【0041】
右カーブにおいて経路偏差を有する場合に、内側前輪は、右側前輪3であったであろう。図3に示す方法には、変更がないが、ステップ111の式(4)は、文字が異なることに注意すべきである。右側前輪3の設定速度は、式(6):
Ωavd=Wavg+(Ward−ωarg) (6)
によって得られる。
【0042】
設定点は、前輪の速度を操縦することを可能にするシステムによって適用される。これらのシステムは、網羅的でないが、操縦される差動装置、ブレーキ及び独立エンジンである。設定点は、ブレーキの作用によって、又は独立エンジン及び操縦される差動装置の場合にこの車輪に対して伝達されるトルクを減少させて、内側前輪の速度を結局低下させることになる。
【0043】
図4に示すように、システムの計算機は、速度センサ6及び7によって送信される信号から前車軸Aavの車輪の速度差を計算する第1手段200を含む。速度センサ8及び9によって送信される信号から後車軸Aarの車輪の速度差を計算する第2手段201。
【0044】
式(1)及び(2)によって与えられる各車軸Aav及びAarの速度偏差間の差を計算する第3手段202、この第3計算手段202の後には、この差を記憶された閾値εと比較する手段203が続く。閾値εは、示した実施形態によれば、舵取り角センサ14によって送信されるステアリングホイールの角度a及びトルクセンサ16によって送信される駆動トルクMによって決定される。
【0045】
第4計算手段204は、第3比較手段203の結果により、経路偏差があるかを決定することを可能にする。第4手段204は、経路偏差の場合に、いずれの前輪が車両1によって画定されるカーブ内側の前輪であるか決定することを可能にする。第4手段204は、舵取り角aから、又は図中、点線の後車軸Aarの車輪の速度差から内側前輪を決定する。第4手段204が、車両1の経路偏差を決定するならば、その場合第4手段204は、図5に示す内側前輪の設定速度を計算する第5手段205を始動させる。
【0046】
図2に示す例において、内側前輪は、左側前輪である。設定速度を計算する第5手段205は、左側前輪の設定速度Ωavgを計算するために、後輪Aarの速度差を考慮に入れ、かつ右側前輪の速度ωavdを考慮に入れる。式(6)を参照されたい。
【0047】
左側前輪の設定速度Ωavgを、左側前輪の瞬間速度ωavgと比較する第6手段206、この比較は、示した例によれば、これら2つの速度間の差であり得る。
【0048】
次に第7手段207は、到達すべき設定速度Ωavgと、この同じ車輪の瞬間速度ωavgとの間の差から、例えば比例積分計算によって、適用すべき内側前輪の速度Tcを修正する設定点を計算することを可能にする。この速度Tcの設定点は、示した実施形態によれば、左側前輪のブレーキキャリパによって適用される圧力を介して設定速度Ωavgと、瞬間速度ωavgとの間の偏差を低下させることを目的とする。第7手段207は、速度Tcを修正する設定点から、示した例によれば左側前輪のブレーキキャリパに対して制動装置10によって適用する圧力Fcの設定点を計算することを可能にする。
【0049】
示した実施形態によれば、経路追跡システムは、幾つかのパラメータが、ある値を超す場合に圧力設定点を適用する第8手段208を含む。これらのパラメータは、示した事例において、角度センサ14に由来する舵取り角a、トルクセンサ15に由来する駆動トルクM、及び手段204に由来する車両の経路偏差であっても良い。特にパラメータとして経路偏差の値を取ることは、システムの時宜を得ない修正を抑えることを可能にする。
【0050】
示した実施形態において、設定速度は、内側前輪に対してブレーキキャリパを作動させる従来の制動装置により到達される。
【0051】
もう1つの実施形態によれば、車輪の速度は、従来の制動装置でなく、例えば駆動トルクを駆動輪に対して配分する操縦される差動装置、各駆動輪に必要な機械エネルギーを供給する個別のエンジン、又は車輪の速度を制御することを可能にする他のあらゆる手段によって制御され得る。
【0052】
システムは、本発明により提案される解決策と同じ性能を確保するようである。機械差動装置、ブレーキによる機械差動装置のシミュレーション、経路検査(ESC)のアンダステアの検査に言及することができる。本発明の解決策は、ESCのアンダステアを検査するこれらのシステムと、本発明の方法が予防的に作用することにおいて異なる。記載された本発明は、このアンダステア段階に到達する前に介在し、従って経路検査システムESCの介在を抑えることになる。本発明は、経路偏差の迅速な検出を可能にすることを主要な利点とする。
【0053】
記載された本発明のもう1つの利点は、漸進的に、かつ運転者に混乱を与えないように作用することであり、他方で経路検査は、アンダステアを遅くし、かつ低下させるように、エンジンを切り、かつ車両を強く制動する。この利点は、後輪の速度により、内側前輪に対して速度設定点を適用することから生じる。
【特許請求の範囲】
【請求項1】
前車軸及び後車軸の各車輪(6、9)に瞬間速度センサを含む自動車車両(1)の経路追跡システムであって、同じ車軸(Aav、Aar)の車輪間の速度偏差を計算する手段(200、201)と、各車軸の前記速度偏差間の差を計算する手段(202)と、この差を記憶された閾値(ε)と比較する手段(203)とを含み、前記後車軸(Aar)の車輪の速度偏差に応じて、又は車両のステアリングホイールの角度(14)の測定符号に応じて前記車両の経路を決定する手段(204)を含むことを特徴とするシステム。
【請求項2】
車両の速度(16)、及び車両のステアリングホイールの角度(14)に応じて閾値の記憶されたマッピングを含む請求項1に記載のシステム。
【請求項3】
前記車両のステアリングホイールの角度(14)を測定する手段と、駆動トルク(15)を測定する手段と、速度(Te)を修正する設定値を決定する手段(207)と、速度(Tc)を修正する前記設定点を適用する手段(208)とを含み、前記手段(208)は、前記車両の前記ステアリングホイールの角度(14)及び前記トルク(15)の測定値がある値を超える時に、速度(Tc)の前記設定点を適用することが可能である請求項2に記載のシステム。
【請求項4】
速度(Tc)を修正する前記設定点を適用する前記手段(208)が、速度(Tc)を修正する前記設定点を、経路の内側前輪に対して適用可能である請求項3に記載のシステム。
【請求項5】
自動車車両の経路追跡方法であって、次の:
− 各前車軸及び後車軸(Aav、Aar)の車輪の速度偏差を計算するステップと、
− 各前車軸及び後車軸(Aav、Aar)間の速度偏差の差を計算するステップと、
− 前記速度偏差の差を記憶された閾値(ε)と比較するステップと、
− 前記後車軸(Aar)の車輪の速度偏差に応じて、又は車両のステアリングホイールの角度(a)の測定符号に応じて前記車両の経路を決定するステップとを含むことを特徴とする方法。
【請求項6】
車両の速度(v)及び前記車両のステアリングホイールの角度(a)に応じて前記閾値(ε)を決定するステップを含む請求項5に記載の方法。
【請求項7】
前記車両のステアリングホイールの角度(a)及び駆動トルク(M)の測定に応じて、適用する速度(Te)の設定点を決定するステップを含む請求項5又は6のいずれか一項に記載の方法。
【請求項8】
前記経路の内側前輪に対して修正設定点を適用するステップを含む請求項5ないし7のいずれか一項に記載の方法。
【請求項1】
前車軸及び後車軸の各車輪(6、9)に瞬間速度センサを含む自動車車両(1)の経路追跡システムであって、同じ車軸(Aav、Aar)の車輪間の速度偏差を計算する手段(200、201)と、各車軸の前記速度偏差間の差を計算する手段(202)と、この差を記憶された閾値(ε)と比較する手段(203)とを含み、前記後車軸(Aar)の車輪の速度偏差に応じて、又は車両のステアリングホイールの角度(14)の測定符号に応じて前記車両の経路を決定する手段(204)を含むことを特徴とするシステム。
【請求項2】
車両の速度(16)、及び車両のステアリングホイールの角度(14)に応じて閾値の記憶されたマッピングを含む請求項1に記載のシステム。
【請求項3】
前記車両のステアリングホイールの角度(14)を測定する手段と、駆動トルク(15)を測定する手段と、速度(Te)を修正する設定値を決定する手段(207)と、速度(Tc)を修正する前記設定点を適用する手段(208)とを含み、前記手段(208)は、前記車両の前記ステアリングホイールの角度(14)及び前記トルク(15)の測定値がある値を超える時に、速度(Tc)の前記設定点を適用することが可能である請求項2に記載のシステム。
【請求項4】
速度(Tc)を修正する前記設定点を適用する前記手段(208)が、速度(Tc)を修正する前記設定点を、経路の内側前輪に対して適用可能である請求項3に記載のシステム。
【請求項5】
自動車車両の経路追跡方法であって、次の:
− 各前車軸及び後車軸(Aav、Aar)の車輪の速度偏差を計算するステップと、
− 各前車軸及び後車軸(Aav、Aar)間の速度偏差の差を計算するステップと、
− 前記速度偏差の差を記憶された閾値(ε)と比較するステップと、
− 前記後車軸(Aar)の車輪の速度偏差に応じて、又は車両のステアリングホイールの角度(a)の測定符号に応じて前記車両の経路を決定するステップとを含むことを特徴とする方法。
【請求項6】
車両の速度(v)及び前記車両のステアリングホイールの角度(a)に応じて前記閾値(ε)を決定するステップを含む請求項5に記載の方法。
【請求項7】
前記車両のステアリングホイールの角度(a)及び駆動トルク(M)の測定に応じて、適用する速度(Te)の設定点を決定するステップを含む請求項5又は6のいずれか一項に記載の方法。
【請求項8】
前記経路の内側前輪に対して修正設定点を適用するステップを含む請求項5ないし7のいずれか一項に記載の方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公表番号】特表2013−517988(P2013−517988A)
【公表日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願番号】特願2012−550493(P2012−550493)
【出願日】平成23年1月20日(2011.1.20)
【国際出願番号】PCT/FR2011/050104
【国際公開番号】WO2011/092415
【国際公開日】平成23年8月4日(2011.8.4)
【出願人】(507308902)ルノー エス.ア.エス. (281)
【Fターム(参考)】
【公表日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願日】平成23年1月20日(2011.1.20)
【国際出願番号】PCT/FR2011/050104
【国際公開番号】WO2011/092415
【国際公開日】平成23年8月4日(2011.8.4)
【出願人】(507308902)ルノー エス.ア.エス. (281)
【Fターム(参考)】
[ Back to top ]