
車両の自動非常制動プロセスを起動する方法及び装置
本発明は、車両の、特に大型輸送車の、自動非常制動プロセスを起動する方法及び装置に関する。これにより、車両が前方走行車両に衝突するのを回避するための、又は衝突が避けられない場合の事故を回避するための、支援機能が提供される。予め定められた警告条件(62)が満たされると、運転者に対する警告が起動される。警告条件(62)が満たされるということは、車両が前方走行車両と衝突するのを防ぐために、予設定された警告時間(tw=toa+th)後の、車両の瞬間運転状況により、自動非常制動プロセスが起動されるということを示している。瞬間運転状況は、少なくとも、車両の検出された加速度(a)、及び/又は車両と前方走行車両との間の、検出された相対加速度(arel)から得られる。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、請求項1及び請求項22の前文に記載の、車両の、特にトラックの、自動非常制動プロセスを起動する方法及び装置に関する。本発明は、車両の前方走行車両との追突を回避するための、及び/又は追突が不可避となった場合の事故による結果を減少させるための支援機能を提供するものであり、与えられた警告条件が満たされると、運転者に対する警告が起動される。警告条件が満たされるということは、予設定された警告時間が切れた後、自動非常制動プロセスが起動されるということである。
【背景技術】
【0002】
特許文献1では、車両用自動ブレーキシステムについて開示している。ブレーキシステムは、一般に、車両の速度を検出するための速度センサと、車両と前方走行車両との間の距離を検出するための距離センサとを具備する。ブレーキシステムは、前方走行車両との相対速度及び距離に基づいて制限時間を決定するが、前記制限時間とは、車両が前方走行車両に衝撃を与えるのに要する時間であり、したがって、ブレーキペダルが押し下げられなかった場合に、制限時間が予設定された制限時間閾値より短いと、警報装置を作動させることにより、車両の運転者に、警報信号が出される。車両の運転者が、警報信号が出されたことに反応してブレーキペダルを押し下げないと、制限時間が予設定された制限時間閾値より再び長くなるまで、前方走行車両との衝撃を回避する目的で車両の速度を減少させるために、永続的に又は変動可能な方法で予設定された時間間隔が切れた後に、自動制動プロセスが実施される。
【0003】
予設定される制限時間閾値がブレーキシステムによって設定される方法のため、自動制動プロセスを実施することにより、前方走行車両との衝撃を回避することができない程に、予設定される制限時間閾値が短くなる可能性がある。この場合、衝撃までの制限時間を考慮するだけでは十分でなく、ブレーキシステムが、さらに、車両の速度及び路面と車両のタイヤとの間の摩擦係数に基づいて、車両を停止するのに必要な停止距離を決定する。制限時間は予設定された制限時間閾値より長いが、車両と前方走行車両との間の距離が決定された停止距離より短い場合には、車両の自動制動プロセスは、警報信号が出された後に実施され、前記プロセスは、具体的には、この距離が現在決定されている停止距離より再び長くなるまで実施される。
【0004】
制限時間を決定する場合、及び停止距離を決定する場合の両方において、運転状況及び交通状況が簡単な方法で考慮されることは好ましくない。このため、複雑な交通状況においては、前方走行車両との衝撃の危険性が、所定の周囲事情下では、検出されない又は間違って予想されることがあるので、警報信号を出すこと、したがって、適宜、自動制動プロセスを実行することが、余りにも早く又は余りにも遅く行われる、又は全く行われない、又は不必要に行われることとなる。
【0005】
【特許文献1】独国特許出願公開第4101759A1号明細書
【発明の開示】
【発明が解決しようとする課題】
【0006】
したがって、本発明の目的は、冒頭で説明した種類の方法及び装置を提供することであり、これにより、複雑な交通状況において、運転者に対する警報を、したがって自動非常制動プロセスを間違って起動する確率が減少する。
【課題を解決するための手段】
【0007】
本目的は、請求項1及び/又は請求項22の特徴によって達成される。
【0008】
運転者に対する警告は、予設定された警告条件が満たされた場合に起動されるが、警告条件が満たされるということは、車両の前方走行車両との追突を回避するために及び/又は追突が不可避となった時の事故による結果を減少させるために予設定された警告時間が切れた場合の、車両の瞬間運転状況及び予設定された非常制動減速度により、自動非常制動プロセスが終了した後の車両と前方走行車両との間の予設定された目標相対速度及び/又は予設定された目標安全距離を達成するという目的で、自動非常制動プロセスが起動されるということである。目標相対速度及び/又は目標安全距離を好適に予設定することにより、とりわけ、運転者に対する警報を確実に起動することができ、したがって自動非常制動プロセスの起動が、前方走行車両との追突を回避するのに必要な時間より早く行われることはない。瞬間運転状況は、本明細書においては、少なくとも、車両の検出された加速度及び車両と前方走行車両との間の検出された相対加速度から、明らかとなる。これらの変数を含むことにより、様々な複雑な交通状況において、車両の前方走行車両との追突の危険性を確実に検出する及び/又は正しく予想することができる。トラックなどの車両の大きな集団のせいで前方走行車両と衝突した場合、一般に重大な結果を招くので、本発明による方法及び/又は本発明による装置を、特にトラックの場合に使用することが適切である。勿論、前方走行車両との追突の危険性だけでなく、他のどのような可動又は固定障害物との衝突の危険性も検出される。
【0009】
本発明による方法の好ましい実施形態が、従属請求項より見出される。
【0010】
運転者に対する警告は、車両の運転者により、視覚的に及び/又は聴覚的に及び/又は触覚的に知覚され得るような方法で行われることが好ましい。したがって、車両が前方走行車両と衝突する危険性があることを、明確な方法で運転者に認識させることができ、したがって、自動非常制動プロセスは、予設定された警告時間が切れた時に起動される。
【0011】
自動非常制動プロセスをより信頼性のあるものにするために、予設定された部分的制動減速度を含む、車両の部分的制動プロセスの形態で、車両の運転者が触覚的に知覚できる、運転者に対する警告を出すことにより、特に前記プロセスが起動される前に、運転者の動作を引き出すことができる。予設定された部分的制動減速度は、本明細書においては、予設定された非常制動減速度より小さい。
【0012】
さらに、与えられた非常制動条件が満たされた場合、及び予設定された警告時間が切れた場合にのみ、自動非常制動プロセスを起動することができる。したがって、自動非常制動プロセスが起動される前に、自動非常制動プロセスの必要性をもう一度確認することができる。
【0013】
非常制動減速度、又はこれに関連する変数、たとえば非常制動圧力、非常制動力、又は非常制動トルクなどは、永続的に又は調整可能な方法で予設定され得る。調整可能な方法で予設定される場合には、たとえば、車両の集団、車両のホイールブレーキ装置のライニングの摩擦係数、車道の条件、又は視界条件を記述する変数に応じて、たとえば、実際に達成され得る最大制動減速度を決定し、実際に達成され得る検出された最大制動減速度に従って、予設定される非常制動減速度の値を設定することができる。非常制動減速度の値はまた、永続的な方法でも容易に予設定され得るものであり、この場合、その値が通常5m/s2〜7m/s2の間の範囲内にある、達成可能な平均最大制動減速度が想定されることが好ましい。
【0014】
永続的に又は調整可能な方法で実施され得る警告時間を、予設定する場合も同様である。永続的に予設定される警告時間は、運転者がいつ自動非常制動プロセスが起動されるかを認識しており、前記プロセスが予想外又は予測不可能な方法で行われることはないという利点を有する。予設定される警告時間の好適な値が、試運転に基づいて登録されることがある。前記値は、通常、1.7秒〜2.3秒の間の範囲内にある。他方、たとえば、車両の集団、車両のホイールブレーキ装置のライニングの摩擦係数、車道の条件、又は視界条件を記述する変数に応じて、予設定される警告時間の値を設定することが考えられる。この場合、警告時間の最小値は予設定され、この値は、原則的に、運転者が、自動非常制動プロセスを起動する準備を整える又は前もって介入するための時間が十分に残っているようにするために、短すぎないようにされる。
【0015】
目標相対速度も、永続的に又は調整可能な方法で予設定され得る。本明細書においては、永続的に予設定される目標相対速度の値は、ほぼゼロであることが好ましい。この場合、車両自身の速度は、自動非常制動プロセスにより、車両が前方走行車両と衝突するのを確実に防止するために、絶対に必要な程度にまで減少される。車両自身の速度を、これ以上減少することは不要であり、そうした場合は、特に後方走行車両にとっての、さらなる危険要因となる。
【0016】
その上、目標安全距離も永続的又は調整可能な方法で予設定され得る。目標安全距離の値は、たとえば、車両の集団、車両のホイールブレーキ装置のブレーキライニングの摩擦係数、車道の条件、車両の速度、又は視界条件などを記述する変数に応じて設定され得る、又は車両の運転者が手動で実施することもできる。目標安全距離のための最小値は、本明細書においては、自動非常制動プロセスが終了した後に、車両が前方走行車両に近づきすぎるのを防止するように予設定されることが好ましい。説明を簡単にするために、目標安全距離の値はまた、永続的に予設定され得るものであり、前記値は、通常、ゼロと数メートルとの間にあるとだけ述べておくこととする。
【0017】
運転者が操作中である場合、及び/又は追突の危険性が減少した場合には、運転者に対する警告が起動されないことが好ましい、及び/又は運転者に対する警告の強度がこれに適応されることが好ましい。このことにより、車両の運転者が、運転者に対する警告が不必要に起動されたことによって運転を妨害されたと感じ、本発明による装置の電源を永続的に切ってしまい、本発明による方法が実施されないような状況が回避される。
【0018】
さらに、運転者が操作中である場合、及び/又は追突の危険性が減少した場合には、既に起動されている運転者に対する警告が中止及び/又は変更され得る、及び/又は自動非常制動プロセスが起動されないようにすることができる。一方、運転者には、前方走行車両との追突を回避するための好適な対抗手段をとるためのできる限り長い機会が与えられ、他方、この間に不要となった運転者に対する警告はもはや維持されなくなる、及び/又はこの間に不要となった自動非常制動プロセスは全く起動されなくなる。
【0019】
運転者に対する警告が予設定された警告時間中にアボートされないと、予設定された警告時間が切れた時に、自動非常制動プロセスを自動的に起動することができる。この場合、車両の運転者には、いつ自動制動プロセスが起動されるかが通知され、運転者は、前方走行車両との追突を回避するための好適な対抗手段をとるための機会が与えられる。
【0020】
運転者が余りにも早くこの方法をアボートしたために、既に起動されている自動制動プロセスが成功しなくなる危険性が生じるのを回避するために、この方法は、決定された非常制動時間が切れるまで、及び/又は予設定された目標相対速度及び予設定された目標安全距離が達成されるまでアボートされない。非常制動時間は、予設定された非常制動減速度に対して、目標相対速度に対して、及び目標安全距離に対して、自動非常制動プロセスが起動された時の、瞬間運転状況に依存する。
【0021】
運転者に対する警告は、運転者に対する警告について予設定された警告時間内に、時系列的に連続して起動される、少なくとも2つの警告段階からなることが好ましく、それぞれの警告段階は、1つの予設定された警告段階の時間に割り当てられる。このことにより、異なるレベルの緊急度の警告段階を使用して、運転者に対する警告を強化することができ、自動非常制動プロセスが起動されるまでの残り時間が減少するにつれて、警告段階の緊急度レベルを増加することができるので、運転者には、自動非常制動プロセスを起動するまでの減少しつつある時間が通知される。
【0022】
警告段階の時間は、永続的に又は調整可能な方法で予設定されることがある。永続的に予設定される警告段階の時間は、運転者が、恐らくこの後に続く警告状態及び/又は自動非常制動プロセスを起動する時間について認識するという利点を有し、自動非常制動プロセスが、予想外又は予測不可能に行われることはない。その上、たとえば、車両の集団、車両のホイールブレーキ装置のブレーキライニングの摩擦係数、視界条件、又は車道の条件を記述する変数に応じて、警告段階の時間の値を設定することができる。したがって、たとえば、自動非常制動プロセスを起動することにより追突を回避するための条件が、それ程好ましいものでなくなった時に、自動非常制動プロセスを、したがって一般に、最も緊急の警告段階を、より早く起動することができる。
【0023】
さらに、さらなる警告段階にそれぞれ割り当てられている、予設定された警告条件が満たされた場合にのみ、第1の警告段階が起動された後、少なくとも1つのさらなる警告段階を起動することができる。したがって、さらなる警告段階を起動する必要性を確認することができ、実際の追突の危険性について不適切な、不要な警告段階を起動することが回避され得る。
【0024】
運転者が操作中である場合、及び/又は追突の危険性が減少した場合には、既に起動されている警告段階の少なくとも1つが中止され得る、及び/又はさらなる警告段階を起動しないようにすることができる。このことにより、車両の運転者が、警告段階が不必要に起動されたことによって運転が妨害されたと感じ、本発明による装置を作動停止させるような状況が回避される。この場合、既に起動されており、かつたとえば運転者に対する視覚的警告の形態で存在する警告段階を、予設定された警告時間が切れるまで維持する、また単に、潜在的な追突の危険性を運転者に通知するためのさらなる警告段階を起動することを控えることもできる。
【0025】
運転者側の操作が、車両のオペレータ制御要素の少なくとも1つの作動に基づいて検出されることが好ましく、このオペレータ制御要素は、特に、車両の長手方向の動力学又は車両を横切る方向の動力学を変更するために使用される。運転者の操作を検出するのに好適なオペレータ制御要素は、たとえば、車両の、アクセルペダル、ブレーキペダル、クラッチペダル、ステアリングホイール、又は方向指示器を含む。
【0026】
追突の危険性の減少は、車両と前方走行車両との間の、時間が経つにつれて増加する距離、及び/又は車両と前方走行車両との間の、時間が経つにつれて減少する相対速度を基準として、容易に検出され得る。
【0027】
複雑な交通状況においてさえも、車両が前方走行車両と追突する危険性を確実に検出する又は正しく予想することができるようにするために、車両の瞬間運転状況は、車両と前方走行車両との間の検出された距離、及び/又は車両の検出された速度、及び/又は車両と前方走行車両との間の検出された相対加速度、及び/又は車両の検出された加速度、及び/又は車道の傾斜、及び/又は車道と車輪との間の摩擦係数に応じて決定される。
【0028】
自動非常制動プロセスが起動された時に、結果として生じる可能性のある事故の危険性を減少させるために、前方走行車両及び/又は後方走行車両に警告を出すことができる。このため、たとえば、ブレーキライト、車両のクラクション、故障警告灯、又はヘッドライト、又は車両のフルビームが作動される。
【0029】
以下、図面を参照しながら、車両の自動非常制動プロセスを起動するための、本発明による方法及び本発明による装置について詳細に説明する。
【発明を実施するための最良の形態】
【0030】
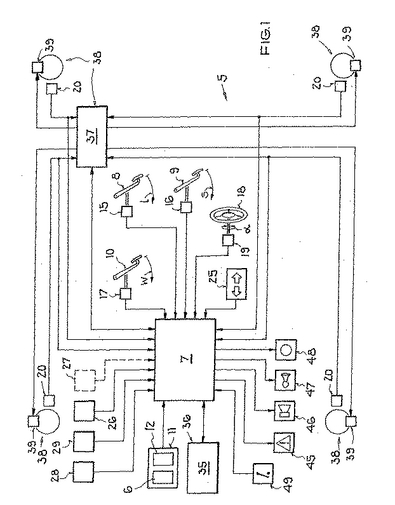
図1は、車両の自動非常制動プロセスを起動するための装置5を示す図である。前記装置は、車両が前方走行車両と追突するのを回避するための支援機能を提供するものであり、前方走行車両との追突が回避され得ない場合にも、少なくとも追突の結果が減少される。このため、装置5は、車両と前方走行車両との間の距離dを測定するための距離センサ6と、車両と前方走行車両との間の相対速度vrelを測定するための相対速度センサ12とを含むセンサユニット11を備える。これに対応する測定信号が、評価ユニット7に送られる。より高い測定精度を得るために、それぞれ最も好適である様々な物理的測定方法が、距離d及び相対速度vrelを測定するために使用されることがある。レーダセンサが、たとえば、距離センサ6及び/又は相対速度センサ12として使用される。
【0031】
手動速度変更ギアボックスを備えた車両において、装置5は、アクセルペダル8と、ブレーキペダル9と、クラッチペダル10とを備える。アクセルペダル8は、アクセルペダルの偏向lを登録し、かつ偏向lをこれに対応する信号に変換するアクセルペダルセンサ15と相互作用する。ブレーキペダルセンサ16が、ブレーキペダルの偏向sを感知し、これに対応する信号を生成する。信号は、評価ユニット7に送られる。クラッチペダル10の偏向wは、評価ユニット7に接続されたクラッチペダルセンサ17によって感知される。自動変速又は自動式速度変更ギアボックスを備えた車両内には、勿論、クラッチペダル10又はクラッチペダルセンサ17はない。さらに、ステアリングホイール18で設定されたハンドル角αを登録し、ハンドル角αをこれに対応する信号に変換するかじ取り角センサ19と相互作用するステアリングホイール18がある。車輪の回転速度(図示せず)は、車輪速度センサ20によって感知される。かじ取り角センサ19の及び車輪速度センサ20の信号も、評価ユニット7に送られる。
【0032】
その上、方向センサ25を作動させると共に、評価ユニット7は、車両の集団、車両のホイールブレーキ装置のブレーキライニングの摩擦係数、視界条件、及び車道の条件を考慮する。車両の集団は、積荷のない車両の集団、及び積荷のある車両の集団、及び/又は被牽引車両の集団の合計から得られる。車両の集団は、たとえば独国特許発明第3843818C1号明細書に開示されている装置の形の、評価ユニット7に接続された集団決定ユニット26により自動的に、又は運転者が集団入力ユニット27を用いて手動で入力することにより決定される。ホイールブレーキ装置のブレーキライニングの摩擦係数は、たとえば、独国特許発明第19911902C1号明細書に例示されている方法に従って考慮されるが、これも、評価ユニット7によって実施されることが好ましい。周囲の視界条件及び車道の条件を決定するための、これに対応するセンサ28、29が存在する。
【0033】
評価ユニット7に送られた信号が評価された後、前記評価ユニット7が、運転手段36の運転手段制御装置35、ブレーキ手段38のブレーキ手段制御装置37、したがって車両のホイールブレーキ装置39、視覚的警告装置45、聴覚的警告装置46、車両のクラクション47、及び車両の照明装置48を動作させる。車両の運転手段36は、運転手段制御装置35によってのみ表されており、分かりやすくするために、運転手段制御装置35及び運転手段36の両方に関連し、かつエンジン、ギアボックスなどを具備する駆動伝達系は示されていない。照明装置48は、たとえば、車両の、故障警告灯、ブレーキライト、又はヘッドライト、及びフルビームを含む。
【0034】
本発明による方法を実施するために、支援機能は、評価ユニット7に接続されたスイッチ49によって作動される、及び作動停止される。スイッチ49は、たとえば、車両内に既存の、コンビネーションメニューユニットのユーザインターフェースの一部である。
【0035】
図2は、フローチャートの形態で、本発明による方法の例示的実施形態を示す図である。これについてより詳細に説明する前に、まず最初に、理解をより容易にするために、基本事項のいくつかについてより詳細に説明する。
【0036】
以下の式は、時間tで、車両が走行する距離s(t)に適用される。
【数1】
式中、時間tの速度v(t)は、
【数2】
から得られる。s(0)は、時間t=0で、車両が走行する距離であり、v(0)は、これに対応する速度、及びa(0)は、時間t=0の、車両の加速度である。このことから、以下の式が得られる。
【数3】
v(0)=一定であるので、これから、以下の関係式が得られる。
【数4】
【0037】
さらに、車両の加速度a(t)は、任意の時間tに、定数値a(0)を有すると想定される。この場合、以下の式が得られる。
【数5】
及び式(2)から、以下の式が得られる。
v(t)=v(0)+a(0)t (6)
【0038】
ここで、さらなる車両が、この車両の前方を走行しており、前方を走行している車両は、その後、指数「v」によって特徴付けられると想定される。時間tの、車両と前方走行車両との間の相対速度vrel(t)は、
vrel(t)=v(t)−vv(t) (7)
によって定義される。
【0039】
したがって、車両が前方走行車両に近づいている場合、相対速度vrel(t)は正である。式(6)を用いて、以下の式が得られる。
vrel(t)=vrel(0)+arel(0)t (8)
【0040】
これに対応して、時間tの、車両と前方走行車両との間の相対加速度arel(t)が、
arel(t)=a(t)−av(t) (9)
と定義される。
【0041】
時間tの、車両と前方走行車両との間の距離d(t)は、
d(t)=d(0)−s(t)+sv(t)
から得られる。これから、式(5)及び(8)に基づいて、以下の関係式が得られる。
【数6】
【0042】
以下においては、車両が前方走行車両と衝突するまでに通過することになる時間(「衝突までの時間“time to crash”」)を示すために、ttcが使用される。
【0043】
さらに、説明を簡単にするために、車両及び前方走行車両の加速度は、時間が経っても一定であると想定する。このように簡単にしたことにより、時間ttcを決定する時の、2つの場合が区別できる。即ち、
−第1の場合には、車両は、まだ動いている前方走行車両の方に走行中である。
−第2の場合には、前方走行車両は、車両が前方走行車両に衝突する前に、停止状態となる。
【0044】
第2の場合には、時間が経っても一定であると想定される加速度により、前方走行車両は、停止状態となった後、その移動方向を逆にする。実際には勿論、この限りではない。この場合、自動非常制動プロセスを不必要に早く起動することとなる。これを回避するために、第1の場合と第2の場合とは、別々に取り扱われなければならない。その静止時間から開始した、前方走行車両の加速度avは、第2の場合にはゼロである。
【0045】
一般に、車両と前方走行車両との間の距離d(t)がゼロになると、前方走行車両との追突が発生する。
【0046】
したがって、第1の場合には、前方走行車両との追突までの時間ttcは、式(10)により、
【数7】
と決定される。
【0047】
arel(0)=0であるが、vrel(0)≠0であると、
【数8】
も真である。
【0048】
この結果、
【数9】
となる。
【0049】
二次方程式(11)の解は、
【数10】
となる。
【0050】
第2の場合には、前方走行車両の静止状態までの時間tstill,vは、
【数11】
を用いて、vv(0)≧0についての式(6)により得られる。
【0051】
したがって、時間tstill,vの、車両と前方走行車両との間の距離d(t)については、式(10)により、以下の式が適用される。
【数12】
【0052】
所望の時間t≧tstill,vの、車両と前方走行車両との間の距離d(t)については、以下の式が適用される。
【数13】
【0053】
式(6)によれば、以下の式は真である。
【数14】
【0054】
さらに、一定の加速度であると想定したことにより、以下の式は真である。
a(tstill,v)=a (19)
したがって、
【数15】
となる。
【0055】
車両と前方走行車両との間の距離d(t)がゼロになると、前方走行車両との追突が起きる。したがって、この結果、前方走行車両の静止状態と、車両の前方走行車両との追突との間の時間ttc−tstill,vは、
【数16】
と、決定される。
【0056】
距離d(0)、相対速度vrel(0)、車両の加速度a(0)、前方走行車両の加速度av(0)が、互いに特定の関係である場合に、車両と前方走行車両との間の追突を回避するための自動非常制動プロセスが起動される。この関係を検出するために、第1のステップで、追突を回避するのに必要な非常制動減速度aNBが決定される。自動非常制動プロセスは、自動非常制動プロセスが終了した後に、車両と前方走行車両との間の、予設定された目標相対速度vrel,z=0及び予設定された目標安全距離dzを達成するという目的で行われる。目標安全距離dzは、本明細書においては、ゼロに等しいことがあるが、安全のために、一般に、ゼロより大きく、たとえば数メートル程度に設定される。
【0057】
第1の場合には、加速度が一定であると想定を単純化したことにより、前方走行車両は、自動非常制動プロセスが終了した後でさえも、その加速度を維持する。式(8)により、非常制動時間tNBは、
【数17】
によって与えられる。ここで、相対非常制動減速度は、
arel,NB=aNB−av(0) (23)
である。
【0058】
自動非常制動プロセスが終了した後に発生する距離d(t)については、式(10)により、
【数18】
となる。
【0059】
dzで等値すると、必要な非常制動減速度aNBについて、以下の式が生じる。
【数19】
【0060】
本発明は、非常制動減速度aNBを予設定する。この場合、式(25)は、
【数20】
と再構成することにより、理解が容易となる。
【0061】
したがって、第1の場合には、式(25)又は(26)に記述されている関係式が満たされると、自動非常制動プロセスが起動される。
【0062】
第2の場合には、自動非常制動プロセスが終了する前に、前方走行車両は停止状態となる。車両と前方走行車両との間の距離d(t)については、t>tstill,vである任意の時間について、式(12)及び(17)に基づいて、以下の式が適用される。
【数21】
【0063】
前方走行車両の静止状態後の、自動非常制動プロセスの終了までの時間は、式(18)により、
【数22】
によって与えられる。
【0064】
上式及び式(27)を用いて、以下の式が得られる。
【数23】
【0065】
収率を掛けることにより、以下の式、
【数24】
及び、最後に、式(7)を用いて、以下の式が得られる。
【数25】
【0066】
必要な非常制動減速度aNBは、本明細書においては、したがって、
【数26】
となる。
【0067】
非常制動減速度aNBが予設定されている場合は、式(32)は、
【数27】
と再構成することにより、理解がより容易となるように表され得る。
【0068】
したがって、第2の場合には、式(32)又は(33)に記述されている関係式が満たされると、自動非常制動プロセスが起動されなければならない。
【0069】
運転者に対する警告が、自動非常制動プロセスが起動される前の、警告時間twに起動されるが、前記警告時間twは、例示的実施形態においては、永続的に予設定される。運転者に対する警告を起動する時間の、相対速度vrel(0)及び距離d(0)については、以下の式が適用される。
vrel(0)=vrel,NB−arel(0)tw (34)
【数28】
【0070】
ここで、dNB及びvrel,NBは、それぞれ、自動非常制動プロセスが起動される時間の、車両と前方走行車両との間の距離及び相対速度を示す。式(34)及び(35)を式(26)に挿入すると、第1の場合では、以下の式が得られる。
【数29】
式中、式(26)のd(0)及びvrel(0)は、それぞれ、dNB及びvrel,NBに置換されている。このことにより、以下の式が生まれる。
【数30】
【0071】
第1の場合には、運転者に対する警告は、式(37)に記述されている関係式が満たされた場合に起動される。
【0072】
さらに、車両及び前方走行車両の速度について、以下の式が適用される。
v(0)=vNB−a(0)tw (38)
vv(0)=vv,NB−av(0)tw (39)
式中、vNB及びvv,NBは、それぞれ、自動非常制動プロセスが起動される時間の、車両及び前方走行車両の速度である。
【0073】
式(38)及び(39)を式(33)に挿入すると、第2の場合には、以下の式が得られる。
【数31】
式中、式(33)のd(0)、v(0)、及びvv(0)は、それぞれ、dNB、vNB、及びvv,NBに置換される。式(40)より、以下の式が生まれる。
【数32】
また、これから、式(9)及び(7)を用いて、以下の式が得られる。
【数33】
【0074】
したがって、運転者に対する警告の起動は、第2の場合には、式(42)に指定された警告条件が満たされた場合に、実施される。
【0075】
運転者に対する警告は、時系列的に連続して起動される、少なくとも2つの警告段階からなるものであり、それぞれの警告段階は、予設定された警告段階の時間に割り当てられる。運転者に対する警告が触覚的に知覚できる方法で出される警告段階は、自動非常制動プロセスを起動する前に、予設定された警告段階の時間thに起動され、運転者に対する警告が視覚的に及び/又は聴覚的に知覚できる方法で出される、さらなる警告段階は、運転者に対する触覚的警告を起動する前に、予設定された警告段階の時間toaに起動される。運転者に対する警告の警告時間twは、この場合、運転者に対する視覚及び/又は聴覚的警告について予設定された警告段階の時間toaと運転者に対する触覚的警告について予設定された警告段階の時間thとの合計によって与えられる。運転者に対する触覚的警告は、車両の部分的制動の形態で実施され、予設定された部分的制動減速度aTBは、予設定された非常制動減速度aNBより低い。したがって、運転者に対する視覚及び/又は聴覚的警告中の速度の変更と、運転者に対する触覚的警告中の速度の変更とは、別々に考慮されなければならない。
【0076】
運転者に対する警告が起動された時間の、距離及び相対速度は、
【数34】
【数35】
に記述される。
式中、
arel,h(0)=aTB−av(0) (46)
である。
【0077】
ここで、自動非常制動プロセスが起動された時間の、車両と前方走行車両との間の、vrel,NBは相対速度であり、dNBは距離である。式(44)及び(45)を式(26)に挿入すると、第1の場合には、以下の式が得られる。
【数36】
式中、式(26)のd(0)及びvrel(0)は、それぞれ、dNB及びvrel,NBに置換される。この結果、以下の式が生じる。
【数37】
【0078】
2つの警告段階を含む運転者に対する警告の起動は、第1の場合には、式(48)に指定されている警告条件が満たされた場合に行われる。
【0079】
さらに、以下の式は、運転者に対する警告が起動された時間の、車両及び前方走行車両の速度に適用される。
vv(0)=vv,NB−av(0)(toa+th) (49)
v(0)=vNB−a(0)toa−aTBth (50)
【0080】
式(49)、(50)、及び(45)を式(33)に挿入すると、第2の場合には、
【数38】
が生まれる。
式中、式(33)のd(0)、v(0)、及びvv(0)は、それぞれ、dNB、vNB、及びvv,NBに置換されている。この結果、以下の式が生じる。
【数39】
そして、最後に、
【数40】
となる。
【0081】
式(53)は、さらに単純化され得る。
【数41】
【0082】
したがって、2つの警告段階を含む運転者に対する警告の起動は、第2の場合には、式(54)に指定されている警告条件が満たされた場合に行われる。
【0083】
図2は、フローチャートの形態で、本発明による方法の例示的実施形態を例示する図である。本方法は、車両の運転者が支援機能を作動させた又は作動停止させた時に、第1の主要ステップ60で、開始される又は中止される。
【0084】
第2の主要ステップ61で、前方走行車両の速度vv、車両の加速度a、前方走行車両の加速度av、及び車両と前方走行車両との間の相対加速度arelは、センサ装置11によって検出された距離d、及び車両と前方走行車両との間の相対速度vrel、及び車輪速度センサ20によって検出された車両の速度vに基づいて、評価ユニット7によって決定される。これまでにカウントされた変数は、本明細書においては、一般に、時間tの関数である。さらに、第2の主要ステップ61で、以下の事項が予設定される。即ち、警告時間tw、第1の予設定された警告段階の時間toa、第2の予設定された警告段階の時間th、目標安全距離dz、目標相対速度vrel,z、部分的制動減速度aTB、相対部分的制動減速度arel,h、及び非常制動減速度aNBである。これらの変数は、本明細書においては、それぞれ、永続的な方法又は調整可能な方法で予設定される。設定は、たとえば、車両の集団、ホイールブレーキ装置のブレーキライニングの摩擦係数、車道の条件、又は視界条件に応じて実施される。非常制動時間tNBは、本明細書においては、上記に記載した変数から計算され得る。
【0085】
第3の主要ステップ62で、運転者に対する警告が視覚的に及び/又は聴覚的に出される第1の警告段階を起動するために、それぞれ、式(48)及び(54)によって与えられる第1の警告段階条件が満たされたかどうかが確認される。
【0086】
第1の警告段階条件が満たされると、第4の主要ステップ63で、運転者に対する警告の第1の警告段階が起動される。同時に、第1の時間カウンタT1が開始される。第1の警告段階で、運転者に対する警告が、視覚的に及び/又は聴覚的に知覚できる方法で出される。運転者に対する視覚的警告は、自動非常制動プロセスが起動されるまでの残りの時間を表示するために、たとえば、明るく照らされた信号又は故障警告記号の形態で、又は視覚的警告装置45を用いて変換される。これに対して、運転者に対する聴覚的警告の場合には、たとえば警報信号又は音声警告が、聴覚的警告装置46によって出され、さらに、この例においてはさらに、運転者の気がそらされることを回避するために、ラジオ及び電話の音が出ないように切り換えられる。
【0087】
他方、第1の警告段階条件が満たされないと、方法シーケンスは、再び第2の主要ステップ61に戻る。
【0088】
アボート基準の存在、たとえば運転者側の操作及び/又は追突の危険性の減少の存在が、第5の主要ステップ64で検出されると、第1のタイミングカウンタT1が予設定された警告時間twより低いかどうかを判断するために、第1の補助ステップ80で、テストが実施される。低かった場合には、方法シーケンスは、第1のタイミングカウンタT1が予設定された警告時間twに少なくとも等しくなるまで、第1の補助ステップ60に戻る。この場合には、その後の第2の補助ステップ81で、運転者に対する警告の第1の警告段階は中止され、方法シーケンスは、再び第2の主要ステップ61に戻る。この結果、第1の警告段階で行われる、運転者の光学及び/又は聴覚的警告は、追突の潜在的な危険性について運転者に指示するために、警告時間twの終了まで維持される。さらなる警告段階及び自動非常制動プロセスは、アボート基準が満たされたことにより、起動されない。
【0089】
他方、アボート基準が満たされないと、先の第6の主要ステップ65で、第1のタイミングカウンタT1が、第1の予設定された警告ステップ時間toaに少なくとも等しいことが検出されると直ぐに、運転者に対する警告の第2の警告段階が、第6の主要ステップ66で起動される。他方、第1のタイミングカウンタT1が第1の予設定された警告段階の時間toaより低いと、方法シーケンスは、再び第5の主要ステップ64に戻る。
【0090】
第2の警告ステップで、運転者に対する警告は、触覚的に知覚できる方法で、具体的には、予設定された部分的制動減速度aTBを含む車両の部分的制動プロセスの形態で出される。第2の警告段階が起動された場合は、第2のタイミングカウンタT2が同時に開始される。
【0091】
この例示的実施形態においては、運転者に対する警告を構成する、全部で2つの警告段階があると想定される。運転者に対する警告が、それぞれ、視覚的に及び/又は聴覚的に及び/又は触覚的に知覚できる方法で出される、他の任意の数の警告段階を有することも考えられる。
【0092】
第8の主要ステップ67で、運転者側の操作及び/又は追突の危険性の減少の例において、アボート基準が満たされたことが検出されると、運転者に対する警告の第1の警告段階及び第2の警告段階は、第3の補助ステップ82で中止され、方法シーケンスは、再び第2の主要ステップ61に戻る。本明細書においては、追突の潜在的な危険性について運転者に指示するために、警告時間twの終了まで、第1の警告段階を維持することも考えられる。
【0093】
しかし、アボート基準が第8の主要ステップ67で満たされないと、運転者に対する警告の第1の及び第2の警告段階は、第10の主要ステップ69で中止され、自動非常制動プロセスは、先の第9の主要ステップ69で、第2のタイミングカウンタT2が第2の予設定された警告段階の時間thに少なくとも等しいことが検出されると直ぐに、制動手段36及び運転手段38を、対応して動作させることによって起動される。同時に、前方走行車両及び/又は後方走行車両への警告が、たとえば、故障警告灯、ブレーキライト、又はヘッドライト、又はフルビームを含む、車両の照明装置48を作動させることにより、又は車両のクラクション47を作動させることによって出される。自動非常制動プロセスが起動された場合は、非常制動時間カウンタTNBも開始される。
【0094】
第11の主要ステップ70で、非常制動時間カウンタTNBが決定された非常制動時間tNBより低いかどうかが確認される。そうでない限り、方法シーケンスは、第11の主要ステップ70に戻る。したがって、既に起動されている自動非常制動プロセスは、早くアボートされ得ない。非常制動時間カウンタTNBが決定された非常制動時間tNBに少なくとも等しくなると直ぐに、運転者に対する警告の第1の警告段階及び自動非常制動プロセスの両方が、第4の補助ステップ83で中止され、方法シーケンスは、その後、再び第2の主要ステップ61に戻る。
【0095】
運転者の操作により、運転者が注意を払っていると結論づけることができる場合、又は追突の危険性の減少により、非常状況がもはや存在しない場合には、第5の主要ステップ64で及び第6の主要ステップ67で確認されるアボート基準が満たされる。運転者側の操作は、車両のオペレータ制御要素の少なくとも1つの作動に基づいて検出され、オペレータ制御要素は、特に、車両の長手方向の動力学又車両を横切る方向の動力学を変更するために使用される。たとえば、アクセルペダル8、ブレーキペダル9、クラッチペダル10、又はステアリングホイール11は、長手方向の動力学又は横切る方向の動力学の変更に関連する。しかし、方向指示器25の作動により、運転者が注意を払っていると結論づけることもできる。アクセルペダル8、ブレーキペダル9、クラッチペダル10、又はステアリングホイール18の場合には、アクセルペダルの偏向l、ブレーキペダルの偏向s、クラッチペダルの偏向w、又はハンドル角αの変更が、それぞれ、特定の、予め定められた閾値を超えた場合にのみ、運転者の操作が行われていると結論づけることが好都合である。
【0096】
追突の危険性の減少は、たとえば、車両と前方走行車両との間の、時間が経つにつれて増加する距離d、及び/又は車両と前方走行車両との間の相対速度vrelの、時間が経つにつれて減少する絶対値を基準として検出される。本明細書においてはまた、アボート基準は、たとえば、車両と前方走行車両との間の距離dの増加及び/又は車両と前方走行車両との間の相対速度vrelの減少が、予設定された閾値より上にある場合にのみ、満たされる。
【0097】
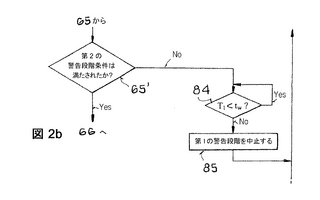
図2bは、図2aに表されているフローチャートを補足する形の、本発明による方法の代替例示的実施形態を示す図である。運転者に対する警告の第2の警告段階は、本明細書においては、第1の補足ステップ65’で、式(37)又は(42)による、関連する、与えられた第2の警告段階条件が満たされたことが検出された場合にのみ起動される。検出されなかった場合には、第5の補助ステップ84で、第1のタイミングカウンタT1が予設定された警告時間twより低いかどうかが確認される。低い場合には、方法シーケンスは、第1のタイミングカウンタT1が予設定された警告時間twに少なくとも等しくなるまで、第5の補助ステップ84に戻る。等しくなった場合には、その後の第7の補助ステップ88で、運転者に対する警告の第1の警告ステップは中止され、方法シーケンスは、再び第2の主要ステップ61に戻る。本明細書においてはまた、第1の警告段階で出される、運転者に対する視覚及び/又は聴覚的警告は、追突の潜在的な危険性について運転者に指示するために、警告時間twの終了まで維持される。
【0098】
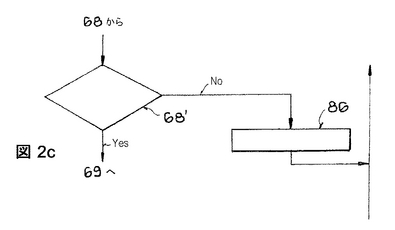
図2cは、図2aに例示されているフローチャートをさらに補足する形の、本発明による方法のさらなる代替例示的実施形態を示す図である。自動非常制動プロセスは、第2の補足ステップ68’で、式(37)又は(42)により、関連する、与えられた非常制動条件が満たされたかどうかが検出された場合にのみ起動される。検出されなかった場合には、第7の補助ステップ86で、運転者に対する警告の第2の警告段階は中止され、方法シーケンスは、再び第2の主要ステップ61に戻る。
【0099】
この場合、図2b及び図2cに示されている例示的実施形態を互いに組み合わせることが考えられる。
【0100】
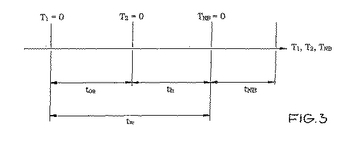
最後に、図3は、アボート基準が満たされず、かつ自動非常制動プロセスが起動されたことを想定した、本発明による方法の時間系列の例を示す図である。第1の警告段階が起動された場合には、運転者に対する警告は、視覚的に及び/又は聴覚的に知覚できる方法で出され、同時に、第1のタイミングカウンタT1が開始される。第1のタイミングカウンタT1が、第1の予設定された警告段階の時間toaに到達すると、第2の警告段階が起動され、前記警告段階は、部分的制動プロセスの形態で、触覚的に知覚できる方法で出される。同時に、第2のタイミングカウンタT2が開始される。運転者に対する警告の第1の警告段階は継続して維持されるが、第2の警告段階を起動して、前記警告段階を中止することも考えられる。第2のタイミングカウンタが、第2の予設定された警告段階の時間thに到達すると、運転者に対する警告の、第2の警告段階、及び適宜、第1の警告段階は中止され、自動非常制動プロセスが起動される。同時に、非常制動時間カウンタTNBが起動される。非常制動時間カウンタTNBが、決定された非常制動時間TNBに到達すると、運転者に対する警告の第1の警告段階及び自動非常制動プロセスが中止される。
【図面の簡単な説明】
【0101】
【図1】本発明による方法を実施するための装置の例示的実施形態を示す概略図。
【図2a】フローチャートの形態の、本発明による方法の例示的実施形態を示す図。
【図2b】本発明による方法の代替例示的実施形態を示す図。
【図2c】本発明による方法のさらなる代替例示的実施形態を示す図。
【図3】本発明による方法の時間系列の例を示す図。
【技術分野】
【0001】
本発明は、請求項1及び請求項22の前文に記載の、車両の、特にトラックの、自動非常制動プロセスを起動する方法及び装置に関する。本発明は、車両の前方走行車両との追突を回避するための、及び/又は追突が不可避となった場合の事故による結果を減少させるための支援機能を提供するものであり、与えられた警告条件が満たされると、運転者に対する警告が起動される。警告条件が満たされるということは、予設定された警告時間が切れた後、自動非常制動プロセスが起動されるということである。
【背景技術】
【0002】
特許文献1では、車両用自動ブレーキシステムについて開示している。ブレーキシステムは、一般に、車両の速度を検出するための速度センサと、車両と前方走行車両との間の距離を検出するための距離センサとを具備する。ブレーキシステムは、前方走行車両との相対速度及び距離に基づいて制限時間を決定するが、前記制限時間とは、車両が前方走行車両に衝撃を与えるのに要する時間であり、したがって、ブレーキペダルが押し下げられなかった場合に、制限時間が予設定された制限時間閾値より短いと、警報装置を作動させることにより、車両の運転者に、警報信号が出される。車両の運転者が、警報信号が出されたことに反応してブレーキペダルを押し下げないと、制限時間が予設定された制限時間閾値より再び長くなるまで、前方走行車両との衝撃を回避する目的で車両の速度を減少させるために、永続的に又は変動可能な方法で予設定された時間間隔が切れた後に、自動制動プロセスが実施される。
【0003】
予設定される制限時間閾値がブレーキシステムによって設定される方法のため、自動制動プロセスを実施することにより、前方走行車両との衝撃を回避することができない程に、予設定される制限時間閾値が短くなる可能性がある。この場合、衝撃までの制限時間を考慮するだけでは十分でなく、ブレーキシステムが、さらに、車両の速度及び路面と車両のタイヤとの間の摩擦係数に基づいて、車両を停止するのに必要な停止距離を決定する。制限時間は予設定された制限時間閾値より長いが、車両と前方走行車両との間の距離が決定された停止距離より短い場合には、車両の自動制動プロセスは、警報信号が出された後に実施され、前記プロセスは、具体的には、この距離が現在決定されている停止距離より再び長くなるまで実施される。
【0004】
制限時間を決定する場合、及び停止距離を決定する場合の両方において、運転状況及び交通状況が簡単な方法で考慮されることは好ましくない。このため、複雑な交通状況においては、前方走行車両との衝撃の危険性が、所定の周囲事情下では、検出されない又は間違って予想されることがあるので、警報信号を出すこと、したがって、適宜、自動制動プロセスを実行することが、余りにも早く又は余りにも遅く行われる、又は全く行われない、又は不必要に行われることとなる。
【0005】
【特許文献1】独国特許出願公開第4101759A1号明細書
【発明の開示】
【発明が解決しようとする課題】
【0006】
したがって、本発明の目的は、冒頭で説明した種類の方法及び装置を提供することであり、これにより、複雑な交通状況において、運転者に対する警報を、したがって自動非常制動プロセスを間違って起動する確率が減少する。
【課題を解決するための手段】
【0007】
本目的は、請求項1及び/又は請求項22の特徴によって達成される。
【0008】
運転者に対する警告は、予設定された警告条件が満たされた場合に起動されるが、警告条件が満たされるということは、車両の前方走行車両との追突を回避するために及び/又は追突が不可避となった時の事故による結果を減少させるために予設定された警告時間が切れた場合の、車両の瞬間運転状況及び予設定された非常制動減速度により、自動非常制動プロセスが終了した後の車両と前方走行車両との間の予設定された目標相対速度及び/又は予設定された目標安全距離を達成するという目的で、自動非常制動プロセスが起動されるということである。目標相対速度及び/又は目標安全距離を好適に予設定することにより、とりわけ、運転者に対する警報を確実に起動することができ、したがって自動非常制動プロセスの起動が、前方走行車両との追突を回避するのに必要な時間より早く行われることはない。瞬間運転状況は、本明細書においては、少なくとも、車両の検出された加速度及び車両と前方走行車両との間の検出された相対加速度から、明らかとなる。これらの変数を含むことにより、様々な複雑な交通状況において、車両の前方走行車両との追突の危険性を確実に検出する及び/又は正しく予想することができる。トラックなどの車両の大きな集団のせいで前方走行車両と衝突した場合、一般に重大な結果を招くので、本発明による方法及び/又は本発明による装置を、特にトラックの場合に使用することが適切である。勿論、前方走行車両との追突の危険性だけでなく、他のどのような可動又は固定障害物との衝突の危険性も検出される。
【0009】
本発明による方法の好ましい実施形態が、従属請求項より見出される。
【0010】
運転者に対する警告は、車両の運転者により、視覚的に及び/又は聴覚的に及び/又は触覚的に知覚され得るような方法で行われることが好ましい。したがって、車両が前方走行車両と衝突する危険性があることを、明確な方法で運転者に認識させることができ、したがって、自動非常制動プロセスは、予設定された警告時間が切れた時に起動される。
【0011】
自動非常制動プロセスをより信頼性のあるものにするために、予設定された部分的制動減速度を含む、車両の部分的制動プロセスの形態で、車両の運転者が触覚的に知覚できる、運転者に対する警告を出すことにより、特に前記プロセスが起動される前に、運転者の動作を引き出すことができる。予設定された部分的制動減速度は、本明細書においては、予設定された非常制動減速度より小さい。
【0012】
さらに、与えられた非常制動条件が満たされた場合、及び予設定された警告時間が切れた場合にのみ、自動非常制動プロセスを起動することができる。したがって、自動非常制動プロセスが起動される前に、自動非常制動プロセスの必要性をもう一度確認することができる。
【0013】
非常制動減速度、又はこれに関連する変数、たとえば非常制動圧力、非常制動力、又は非常制動トルクなどは、永続的に又は調整可能な方法で予設定され得る。調整可能な方法で予設定される場合には、たとえば、車両の集団、車両のホイールブレーキ装置のライニングの摩擦係数、車道の条件、又は視界条件を記述する変数に応じて、たとえば、実際に達成され得る最大制動減速度を決定し、実際に達成され得る検出された最大制動減速度に従って、予設定される非常制動減速度の値を設定することができる。非常制動減速度の値はまた、永続的な方法でも容易に予設定され得るものであり、この場合、その値が通常5m/s2〜7m/s2の間の範囲内にある、達成可能な平均最大制動減速度が想定されることが好ましい。
【0014】
永続的に又は調整可能な方法で実施され得る警告時間を、予設定する場合も同様である。永続的に予設定される警告時間は、運転者がいつ自動非常制動プロセスが起動されるかを認識しており、前記プロセスが予想外又は予測不可能な方法で行われることはないという利点を有する。予設定される警告時間の好適な値が、試運転に基づいて登録されることがある。前記値は、通常、1.7秒〜2.3秒の間の範囲内にある。他方、たとえば、車両の集団、車両のホイールブレーキ装置のライニングの摩擦係数、車道の条件、又は視界条件を記述する変数に応じて、予設定される警告時間の値を設定することが考えられる。この場合、警告時間の最小値は予設定され、この値は、原則的に、運転者が、自動非常制動プロセスを起動する準備を整える又は前もって介入するための時間が十分に残っているようにするために、短すぎないようにされる。
【0015】
目標相対速度も、永続的に又は調整可能な方法で予設定され得る。本明細書においては、永続的に予設定される目標相対速度の値は、ほぼゼロであることが好ましい。この場合、車両自身の速度は、自動非常制動プロセスにより、車両が前方走行車両と衝突するのを確実に防止するために、絶対に必要な程度にまで減少される。車両自身の速度を、これ以上減少することは不要であり、そうした場合は、特に後方走行車両にとっての、さらなる危険要因となる。
【0016】
その上、目標安全距離も永続的又は調整可能な方法で予設定され得る。目標安全距離の値は、たとえば、車両の集団、車両のホイールブレーキ装置のブレーキライニングの摩擦係数、車道の条件、車両の速度、又は視界条件などを記述する変数に応じて設定され得る、又は車両の運転者が手動で実施することもできる。目標安全距離のための最小値は、本明細書においては、自動非常制動プロセスが終了した後に、車両が前方走行車両に近づきすぎるのを防止するように予設定されることが好ましい。説明を簡単にするために、目標安全距離の値はまた、永続的に予設定され得るものであり、前記値は、通常、ゼロと数メートルとの間にあるとだけ述べておくこととする。
【0017】
運転者が操作中である場合、及び/又は追突の危険性が減少した場合には、運転者に対する警告が起動されないことが好ましい、及び/又は運転者に対する警告の強度がこれに適応されることが好ましい。このことにより、車両の運転者が、運転者に対する警告が不必要に起動されたことによって運転を妨害されたと感じ、本発明による装置の電源を永続的に切ってしまい、本発明による方法が実施されないような状況が回避される。
【0018】
さらに、運転者が操作中である場合、及び/又は追突の危険性が減少した場合には、既に起動されている運転者に対する警告が中止及び/又は変更され得る、及び/又は自動非常制動プロセスが起動されないようにすることができる。一方、運転者には、前方走行車両との追突を回避するための好適な対抗手段をとるためのできる限り長い機会が与えられ、他方、この間に不要となった運転者に対する警告はもはや維持されなくなる、及び/又はこの間に不要となった自動非常制動プロセスは全く起動されなくなる。
【0019】
運転者に対する警告が予設定された警告時間中にアボートされないと、予設定された警告時間が切れた時に、自動非常制動プロセスを自動的に起動することができる。この場合、車両の運転者には、いつ自動制動プロセスが起動されるかが通知され、運転者は、前方走行車両との追突を回避するための好適な対抗手段をとるための機会が与えられる。
【0020】
運転者が余りにも早くこの方法をアボートしたために、既に起動されている自動制動プロセスが成功しなくなる危険性が生じるのを回避するために、この方法は、決定された非常制動時間が切れるまで、及び/又は予設定された目標相対速度及び予設定された目標安全距離が達成されるまでアボートされない。非常制動時間は、予設定された非常制動減速度に対して、目標相対速度に対して、及び目標安全距離に対して、自動非常制動プロセスが起動された時の、瞬間運転状況に依存する。
【0021】
運転者に対する警告は、運転者に対する警告について予設定された警告時間内に、時系列的に連続して起動される、少なくとも2つの警告段階からなることが好ましく、それぞれの警告段階は、1つの予設定された警告段階の時間に割り当てられる。このことにより、異なるレベルの緊急度の警告段階を使用して、運転者に対する警告を強化することができ、自動非常制動プロセスが起動されるまでの残り時間が減少するにつれて、警告段階の緊急度レベルを増加することができるので、運転者には、自動非常制動プロセスを起動するまでの減少しつつある時間が通知される。
【0022】
警告段階の時間は、永続的に又は調整可能な方法で予設定されることがある。永続的に予設定される警告段階の時間は、運転者が、恐らくこの後に続く警告状態及び/又は自動非常制動プロセスを起動する時間について認識するという利点を有し、自動非常制動プロセスが、予想外又は予測不可能に行われることはない。その上、たとえば、車両の集団、車両のホイールブレーキ装置のブレーキライニングの摩擦係数、視界条件、又は車道の条件を記述する変数に応じて、警告段階の時間の値を設定することができる。したがって、たとえば、自動非常制動プロセスを起動することにより追突を回避するための条件が、それ程好ましいものでなくなった時に、自動非常制動プロセスを、したがって一般に、最も緊急の警告段階を、より早く起動することができる。
【0023】
さらに、さらなる警告段階にそれぞれ割り当てられている、予設定された警告条件が満たされた場合にのみ、第1の警告段階が起動された後、少なくとも1つのさらなる警告段階を起動することができる。したがって、さらなる警告段階を起動する必要性を確認することができ、実際の追突の危険性について不適切な、不要な警告段階を起動することが回避され得る。
【0024】
運転者が操作中である場合、及び/又は追突の危険性が減少した場合には、既に起動されている警告段階の少なくとも1つが中止され得る、及び/又はさらなる警告段階を起動しないようにすることができる。このことにより、車両の運転者が、警告段階が不必要に起動されたことによって運転が妨害されたと感じ、本発明による装置を作動停止させるような状況が回避される。この場合、既に起動されており、かつたとえば運転者に対する視覚的警告の形態で存在する警告段階を、予設定された警告時間が切れるまで維持する、また単に、潜在的な追突の危険性を運転者に通知するためのさらなる警告段階を起動することを控えることもできる。
【0025】
運転者側の操作が、車両のオペレータ制御要素の少なくとも1つの作動に基づいて検出されることが好ましく、このオペレータ制御要素は、特に、車両の長手方向の動力学又は車両を横切る方向の動力学を変更するために使用される。運転者の操作を検出するのに好適なオペレータ制御要素は、たとえば、車両の、アクセルペダル、ブレーキペダル、クラッチペダル、ステアリングホイール、又は方向指示器を含む。
【0026】
追突の危険性の減少は、車両と前方走行車両との間の、時間が経つにつれて増加する距離、及び/又は車両と前方走行車両との間の、時間が経つにつれて減少する相対速度を基準として、容易に検出され得る。
【0027】
複雑な交通状況においてさえも、車両が前方走行車両と追突する危険性を確実に検出する又は正しく予想することができるようにするために、車両の瞬間運転状況は、車両と前方走行車両との間の検出された距離、及び/又は車両の検出された速度、及び/又は車両と前方走行車両との間の検出された相対加速度、及び/又は車両の検出された加速度、及び/又は車道の傾斜、及び/又は車道と車輪との間の摩擦係数に応じて決定される。
【0028】
自動非常制動プロセスが起動された時に、結果として生じる可能性のある事故の危険性を減少させるために、前方走行車両及び/又は後方走行車両に警告を出すことができる。このため、たとえば、ブレーキライト、車両のクラクション、故障警告灯、又はヘッドライト、又は車両のフルビームが作動される。
【0029】
以下、図面を参照しながら、車両の自動非常制動プロセスを起動するための、本発明による方法及び本発明による装置について詳細に説明する。
【発明を実施するための最良の形態】
【0030】
図1は、車両の自動非常制動プロセスを起動するための装置5を示す図である。前記装置は、車両が前方走行車両と追突するのを回避するための支援機能を提供するものであり、前方走行車両との追突が回避され得ない場合にも、少なくとも追突の結果が減少される。このため、装置5は、車両と前方走行車両との間の距離dを測定するための距離センサ6と、車両と前方走行車両との間の相対速度vrelを測定するための相対速度センサ12とを含むセンサユニット11を備える。これに対応する測定信号が、評価ユニット7に送られる。より高い測定精度を得るために、それぞれ最も好適である様々な物理的測定方法が、距離d及び相対速度vrelを測定するために使用されることがある。レーダセンサが、たとえば、距離センサ6及び/又は相対速度センサ12として使用される。
【0031】
手動速度変更ギアボックスを備えた車両において、装置5は、アクセルペダル8と、ブレーキペダル9と、クラッチペダル10とを備える。アクセルペダル8は、アクセルペダルの偏向lを登録し、かつ偏向lをこれに対応する信号に変換するアクセルペダルセンサ15と相互作用する。ブレーキペダルセンサ16が、ブレーキペダルの偏向sを感知し、これに対応する信号を生成する。信号は、評価ユニット7に送られる。クラッチペダル10の偏向wは、評価ユニット7に接続されたクラッチペダルセンサ17によって感知される。自動変速又は自動式速度変更ギアボックスを備えた車両内には、勿論、クラッチペダル10又はクラッチペダルセンサ17はない。さらに、ステアリングホイール18で設定されたハンドル角αを登録し、ハンドル角αをこれに対応する信号に変換するかじ取り角センサ19と相互作用するステアリングホイール18がある。車輪の回転速度(図示せず)は、車輪速度センサ20によって感知される。かじ取り角センサ19の及び車輪速度センサ20の信号も、評価ユニット7に送られる。
【0032】
その上、方向センサ25を作動させると共に、評価ユニット7は、車両の集団、車両のホイールブレーキ装置のブレーキライニングの摩擦係数、視界条件、及び車道の条件を考慮する。車両の集団は、積荷のない車両の集団、及び積荷のある車両の集団、及び/又は被牽引車両の集団の合計から得られる。車両の集団は、たとえば独国特許発明第3843818C1号明細書に開示されている装置の形の、評価ユニット7に接続された集団決定ユニット26により自動的に、又は運転者が集団入力ユニット27を用いて手動で入力することにより決定される。ホイールブレーキ装置のブレーキライニングの摩擦係数は、たとえば、独国特許発明第19911902C1号明細書に例示されている方法に従って考慮されるが、これも、評価ユニット7によって実施されることが好ましい。周囲の視界条件及び車道の条件を決定するための、これに対応するセンサ28、29が存在する。
【0033】
評価ユニット7に送られた信号が評価された後、前記評価ユニット7が、運転手段36の運転手段制御装置35、ブレーキ手段38のブレーキ手段制御装置37、したがって車両のホイールブレーキ装置39、視覚的警告装置45、聴覚的警告装置46、車両のクラクション47、及び車両の照明装置48を動作させる。車両の運転手段36は、運転手段制御装置35によってのみ表されており、分かりやすくするために、運転手段制御装置35及び運転手段36の両方に関連し、かつエンジン、ギアボックスなどを具備する駆動伝達系は示されていない。照明装置48は、たとえば、車両の、故障警告灯、ブレーキライト、又はヘッドライト、及びフルビームを含む。
【0034】
本発明による方法を実施するために、支援機能は、評価ユニット7に接続されたスイッチ49によって作動される、及び作動停止される。スイッチ49は、たとえば、車両内に既存の、コンビネーションメニューユニットのユーザインターフェースの一部である。
【0035】
図2は、フローチャートの形態で、本発明による方法の例示的実施形態を示す図である。これについてより詳細に説明する前に、まず最初に、理解をより容易にするために、基本事項のいくつかについてより詳細に説明する。
【0036】
以下の式は、時間tで、車両が走行する距離s(t)に適用される。
【数1】
式中、時間tの速度v(t)は、
【数2】
から得られる。s(0)は、時間t=0で、車両が走行する距離であり、v(0)は、これに対応する速度、及びa(0)は、時間t=0の、車両の加速度である。このことから、以下の式が得られる。
【数3】
v(0)=一定であるので、これから、以下の関係式が得られる。
【数4】
【0037】
さらに、車両の加速度a(t)は、任意の時間tに、定数値a(0)を有すると想定される。この場合、以下の式が得られる。
【数5】
及び式(2)から、以下の式が得られる。
v(t)=v(0)+a(0)t (6)
【0038】
ここで、さらなる車両が、この車両の前方を走行しており、前方を走行している車両は、その後、指数「v」によって特徴付けられると想定される。時間tの、車両と前方走行車両との間の相対速度vrel(t)は、
vrel(t)=v(t)−vv(t) (7)
によって定義される。
【0039】
したがって、車両が前方走行車両に近づいている場合、相対速度vrel(t)は正である。式(6)を用いて、以下の式が得られる。
vrel(t)=vrel(0)+arel(0)t (8)
【0040】
これに対応して、時間tの、車両と前方走行車両との間の相対加速度arel(t)が、
arel(t)=a(t)−av(t) (9)
と定義される。
【0041】
時間tの、車両と前方走行車両との間の距離d(t)は、
d(t)=d(0)−s(t)+sv(t)
から得られる。これから、式(5)及び(8)に基づいて、以下の関係式が得られる。
【数6】
【0042】
以下においては、車両が前方走行車両と衝突するまでに通過することになる時間(「衝突までの時間“time to crash”」)を示すために、ttcが使用される。
【0043】
さらに、説明を簡単にするために、車両及び前方走行車両の加速度は、時間が経っても一定であると想定する。このように簡単にしたことにより、時間ttcを決定する時の、2つの場合が区別できる。即ち、
−第1の場合には、車両は、まだ動いている前方走行車両の方に走行中である。
−第2の場合には、前方走行車両は、車両が前方走行車両に衝突する前に、停止状態となる。
【0044】
第2の場合には、時間が経っても一定であると想定される加速度により、前方走行車両は、停止状態となった後、その移動方向を逆にする。実際には勿論、この限りではない。この場合、自動非常制動プロセスを不必要に早く起動することとなる。これを回避するために、第1の場合と第2の場合とは、別々に取り扱われなければならない。その静止時間から開始した、前方走行車両の加速度avは、第2の場合にはゼロである。
【0045】
一般に、車両と前方走行車両との間の距離d(t)がゼロになると、前方走行車両との追突が発生する。
【0046】
したがって、第1の場合には、前方走行車両との追突までの時間ttcは、式(10)により、
【数7】
と決定される。
【0047】
arel(0)=0であるが、vrel(0)≠0であると、
【数8】
も真である。
【0048】
この結果、
【数9】
となる。
【0049】
二次方程式(11)の解は、
【数10】
となる。
【0050】
第2の場合には、前方走行車両の静止状態までの時間tstill,vは、
【数11】
を用いて、vv(0)≧0についての式(6)により得られる。
【0051】
したがって、時間tstill,vの、車両と前方走行車両との間の距離d(t)については、式(10)により、以下の式が適用される。
【数12】
【0052】
所望の時間t≧tstill,vの、車両と前方走行車両との間の距離d(t)については、以下の式が適用される。
【数13】
【0053】
式(6)によれば、以下の式は真である。
【数14】
【0054】
さらに、一定の加速度であると想定したことにより、以下の式は真である。
a(tstill,v)=a (19)
したがって、
【数15】
となる。
【0055】
車両と前方走行車両との間の距離d(t)がゼロになると、前方走行車両との追突が起きる。したがって、この結果、前方走行車両の静止状態と、車両の前方走行車両との追突との間の時間ttc−tstill,vは、
【数16】
と、決定される。
【0056】
距離d(0)、相対速度vrel(0)、車両の加速度a(0)、前方走行車両の加速度av(0)が、互いに特定の関係である場合に、車両と前方走行車両との間の追突を回避するための自動非常制動プロセスが起動される。この関係を検出するために、第1のステップで、追突を回避するのに必要な非常制動減速度aNBが決定される。自動非常制動プロセスは、自動非常制動プロセスが終了した後に、車両と前方走行車両との間の、予設定された目標相対速度vrel,z=0及び予設定された目標安全距離dzを達成するという目的で行われる。目標安全距離dzは、本明細書においては、ゼロに等しいことがあるが、安全のために、一般に、ゼロより大きく、たとえば数メートル程度に設定される。
【0057】
第1の場合には、加速度が一定であると想定を単純化したことにより、前方走行車両は、自動非常制動プロセスが終了した後でさえも、その加速度を維持する。式(8)により、非常制動時間tNBは、
【数17】
によって与えられる。ここで、相対非常制動減速度は、
arel,NB=aNB−av(0) (23)
である。
【0058】
自動非常制動プロセスが終了した後に発生する距離d(t)については、式(10)により、
【数18】
となる。
【0059】
dzで等値すると、必要な非常制動減速度aNBについて、以下の式が生じる。
【数19】
【0060】
本発明は、非常制動減速度aNBを予設定する。この場合、式(25)は、
【数20】
と再構成することにより、理解が容易となる。
【0061】
したがって、第1の場合には、式(25)又は(26)に記述されている関係式が満たされると、自動非常制動プロセスが起動される。
【0062】
第2の場合には、自動非常制動プロセスが終了する前に、前方走行車両は停止状態となる。車両と前方走行車両との間の距離d(t)については、t>tstill,vである任意の時間について、式(12)及び(17)に基づいて、以下の式が適用される。
【数21】
【0063】
前方走行車両の静止状態後の、自動非常制動プロセスの終了までの時間は、式(18)により、
【数22】
によって与えられる。
【0064】
上式及び式(27)を用いて、以下の式が得られる。
【数23】
【0065】
収率を掛けることにより、以下の式、
【数24】
及び、最後に、式(7)を用いて、以下の式が得られる。
【数25】
【0066】
必要な非常制動減速度aNBは、本明細書においては、したがって、
【数26】
となる。
【0067】
非常制動減速度aNBが予設定されている場合は、式(32)は、
【数27】
と再構成することにより、理解がより容易となるように表され得る。
【0068】
したがって、第2の場合には、式(32)又は(33)に記述されている関係式が満たされると、自動非常制動プロセスが起動されなければならない。
【0069】
運転者に対する警告が、自動非常制動プロセスが起動される前の、警告時間twに起動されるが、前記警告時間twは、例示的実施形態においては、永続的に予設定される。運転者に対する警告を起動する時間の、相対速度vrel(0)及び距離d(0)については、以下の式が適用される。
vrel(0)=vrel,NB−arel(0)tw (34)
【数28】
【0070】
ここで、dNB及びvrel,NBは、それぞれ、自動非常制動プロセスが起動される時間の、車両と前方走行車両との間の距離及び相対速度を示す。式(34)及び(35)を式(26)に挿入すると、第1の場合では、以下の式が得られる。
【数29】
式中、式(26)のd(0)及びvrel(0)は、それぞれ、dNB及びvrel,NBに置換されている。このことにより、以下の式が生まれる。
【数30】
【0071】
第1の場合には、運転者に対する警告は、式(37)に記述されている関係式が満たされた場合に起動される。
【0072】
さらに、車両及び前方走行車両の速度について、以下の式が適用される。
v(0)=vNB−a(0)tw (38)
vv(0)=vv,NB−av(0)tw (39)
式中、vNB及びvv,NBは、それぞれ、自動非常制動プロセスが起動される時間の、車両及び前方走行車両の速度である。
【0073】
式(38)及び(39)を式(33)に挿入すると、第2の場合には、以下の式が得られる。
【数31】
式中、式(33)のd(0)、v(0)、及びvv(0)は、それぞれ、dNB、vNB、及びvv,NBに置換される。式(40)より、以下の式が生まれる。
【数32】
また、これから、式(9)及び(7)を用いて、以下の式が得られる。
【数33】
【0074】
したがって、運転者に対する警告の起動は、第2の場合には、式(42)に指定された警告条件が満たされた場合に、実施される。
【0075】
運転者に対する警告は、時系列的に連続して起動される、少なくとも2つの警告段階からなるものであり、それぞれの警告段階は、予設定された警告段階の時間に割り当てられる。運転者に対する警告が触覚的に知覚できる方法で出される警告段階は、自動非常制動プロセスを起動する前に、予設定された警告段階の時間thに起動され、運転者に対する警告が視覚的に及び/又は聴覚的に知覚できる方法で出される、さらなる警告段階は、運転者に対する触覚的警告を起動する前に、予設定された警告段階の時間toaに起動される。運転者に対する警告の警告時間twは、この場合、運転者に対する視覚及び/又は聴覚的警告について予設定された警告段階の時間toaと運転者に対する触覚的警告について予設定された警告段階の時間thとの合計によって与えられる。運転者に対する触覚的警告は、車両の部分的制動の形態で実施され、予設定された部分的制動減速度aTBは、予設定された非常制動減速度aNBより低い。したがって、運転者に対する視覚及び/又は聴覚的警告中の速度の変更と、運転者に対する触覚的警告中の速度の変更とは、別々に考慮されなければならない。
【0076】
運転者に対する警告が起動された時間の、距離及び相対速度は、
【数34】
【数35】
に記述される。
式中、
arel,h(0)=aTB−av(0) (46)
である。
【0077】
ここで、自動非常制動プロセスが起動された時間の、車両と前方走行車両との間の、vrel,NBは相対速度であり、dNBは距離である。式(44)及び(45)を式(26)に挿入すると、第1の場合には、以下の式が得られる。
【数36】
式中、式(26)のd(0)及びvrel(0)は、それぞれ、dNB及びvrel,NBに置換される。この結果、以下の式が生じる。
【数37】
【0078】
2つの警告段階を含む運転者に対する警告の起動は、第1の場合には、式(48)に指定されている警告条件が満たされた場合に行われる。
【0079】
さらに、以下の式は、運転者に対する警告が起動された時間の、車両及び前方走行車両の速度に適用される。
vv(0)=vv,NB−av(0)(toa+th) (49)
v(0)=vNB−a(0)toa−aTBth (50)
【0080】
式(49)、(50)、及び(45)を式(33)に挿入すると、第2の場合には、
【数38】
が生まれる。
式中、式(33)のd(0)、v(0)、及びvv(0)は、それぞれ、dNB、vNB、及びvv,NBに置換されている。この結果、以下の式が生じる。
【数39】
そして、最後に、
【数40】
となる。
【0081】
式(53)は、さらに単純化され得る。
【数41】
【0082】
したがって、2つの警告段階を含む運転者に対する警告の起動は、第2の場合には、式(54)に指定されている警告条件が満たされた場合に行われる。
【0083】
図2は、フローチャートの形態で、本発明による方法の例示的実施形態を例示する図である。本方法は、車両の運転者が支援機能を作動させた又は作動停止させた時に、第1の主要ステップ60で、開始される又は中止される。
【0084】
第2の主要ステップ61で、前方走行車両の速度vv、車両の加速度a、前方走行車両の加速度av、及び車両と前方走行車両との間の相対加速度arelは、センサ装置11によって検出された距離d、及び車両と前方走行車両との間の相対速度vrel、及び車輪速度センサ20によって検出された車両の速度vに基づいて、評価ユニット7によって決定される。これまでにカウントされた変数は、本明細書においては、一般に、時間tの関数である。さらに、第2の主要ステップ61で、以下の事項が予設定される。即ち、警告時間tw、第1の予設定された警告段階の時間toa、第2の予設定された警告段階の時間th、目標安全距離dz、目標相対速度vrel,z、部分的制動減速度aTB、相対部分的制動減速度arel,h、及び非常制動減速度aNBである。これらの変数は、本明細書においては、それぞれ、永続的な方法又は調整可能な方法で予設定される。設定は、たとえば、車両の集団、ホイールブレーキ装置のブレーキライニングの摩擦係数、車道の条件、又は視界条件に応じて実施される。非常制動時間tNBは、本明細書においては、上記に記載した変数から計算され得る。
【0085】
第3の主要ステップ62で、運転者に対する警告が視覚的に及び/又は聴覚的に出される第1の警告段階を起動するために、それぞれ、式(48)及び(54)によって与えられる第1の警告段階条件が満たされたかどうかが確認される。
【0086】
第1の警告段階条件が満たされると、第4の主要ステップ63で、運転者に対する警告の第1の警告段階が起動される。同時に、第1の時間カウンタT1が開始される。第1の警告段階で、運転者に対する警告が、視覚的に及び/又は聴覚的に知覚できる方法で出される。運転者に対する視覚的警告は、自動非常制動プロセスが起動されるまでの残りの時間を表示するために、たとえば、明るく照らされた信号又は故障警告記号の形態で、又は視覚的警告装置45を用いて変換される。これに対して、運転者に対する聴覚的警告の場合には、たとえば警報信号又は音声警告が、聴覚的警告装置46によって出され、さらに、この例においてはさらに、運転者の気がそらされることを回避するために、ラジオ及び電話の音が出ないように切り換えられる。
【0087】
他方、第1の警告段階条件が満たされないと、方法シーケンスは、再び第2の主要ステップ61に戻る。
【0088】
アボート基準の存在、たとえば運転者側の操作及び/又は追突の危険性の減少の存在が、第5の主要ステップ64で検出されると、第1のタイミングカウンタT1が予設定された警告時間twより低いかどうかを判断するために、第1の補助ステップ80で、テストが実施される。低かった場合には、方法シーケンスは、第1のタイミングカウンタT1が予設定された警告時間twに少なくとも等しくなるまで、第1の補助ステップ60に戻る。この場合には、その後の第2の補助ステップ81で、運転者に対する警告の第1の警告段階は中止され、方法シーケンスは、再び第2の主要ステップ61に戻る。この結果、第1の警告段階で行われる、運転者の光学及び/又は聴覚的警告は、追突の潜在的な危険性について運転者に指示するために、警告時間twの終了まで維持される。さらなる警告段階及び自動非常制動プロセスは、アボート基準が満たされたことにより、起動されない。
【0089】
他方、アボート基準が満たされないと、先の第6の主要ステップ65で、第1のタイミングカウンタT1が、第1の予設定された警告ステップ時間toaに少なくとも等しいことが検出されると直ぐに、運転者に対する警告の第2の警告段階が、第6の主要ステップ66で起動される。他方、第1のタイミングカウンタT1が第1の予設定された警告段階の時間toaより低いと、方法シーケンスは、再び第5の主要ステップ64に戻る。
【0090】
第2の警告ステップで、運転者に対する警告は、触覚的に知覚できる方法で、具体的には、予設定された部分的制動減速度aTBを含む車両の部分的制動プロセスの形態で出される。第2の警告段階が起動された場合は、第2のタイミングカウンタT2が同時に開始される。
【0091】
この例示的実施形態においては、運転者に対する警告を構成する、全部で2つの警告段階があると想定される。運転者に対する警告が、それぞれ、視覚的に及び/又は聴覚的に及び/又は触覚的に知覚できる方法で出される、他の任意の数の警告段階を有することも考えられる。
【0092】
第8の主要ステップ67で、運転者側の操作及び/又は追突の危険性の減少の例において、アボート基準が満たされたことが検出されると、運転者に対する警告の第1の警告段階及び第2の警告段階は、第3の補助ステップ82で中止され、方法シーケンスは、再び第2の主要ステップ61に戻る。本明細書においては、追突の潜在的な危険性について運転者に指示するために、警告時間twの終了まで、第1の警告段階を維持することも考えられる。
【0093】
しかし、アボート基準が第8の主要ステップ67で満たされないと、運転者に対する警告の第1の及び第2の警告段階は、第10の主要ステップ69で中止され、自動非常制動プロセスは、先の第9の主要ステップ69で、第2のタイミングカウンタT2が第2の予設定された警告段階の時間thに少なくとも等しいことが検出されると直ぐに、制動手段36及び運転手段38を、対応して動作させることによって起動される。同時に、前方走行車両及び/又は後方走行車両への警告が、たとえば、故障警告灯、ブレーキライト、又はヘッドライト、又はフルビームを含む、車両の照明装置48を作動させることにより、又は車両のクラクション47を作動させることによって出される。自動非常制動プロセスが起動された場合は、非常制動時間カウンタTNBも開始される。
【0094】
第11の主要ステップ70で、非常制動時間カウンタTNBが決定された非常制動時間tNBより低いかどうかが確認される。そうでない限り、方法シーケンスは、第11の主要ステップ70に戻る。したがって、既に起動されている自動非常制動プロセスは、早くアボートされ得ない。非常制動時間カウンタTNBが決定された非常制動時間tNBに少なくとも等しくなると直ぐに、運転者に対する警告の第1の警告段階及び自動非常制動プロセスの両方が、第4の補助ステップ83で中止され、方法シーケンスは、その後、再び第2の主要ステップ61に戻る。
【0095】
運転者の操作により、運転者が注意を払っていると結論づけることができる場合、又は追突の危険性の減少により、非常状況がもはや存在しない場合には、第5の主要ステップ64で及び第6の主要ステップ67で確認されるアボート基準が満たされる。運転者側の操作は、車両のオペレータ制御要素の少なくとも1つの作動に基づいて検出され、オペレータ制御要素は、特に、車両の長手方向の動力学又車両を横切る方向の動力学を変更するために使用される。たとえば、アクセルペダル8、ブレーキペダル9、クラッチペダル10、又はステアリングホイール11は、長手方向の動力学又は横切る方向の動力学の変更に関連する。しかし、方向指示器25の作動により、運転者が注意を払っていると結論づけることもできる。アクセルペダル8、ブレーキペダル9、クラッチペダル10、又はステアリングホイール18の場合には、アクセルペダルの偏向l、ブレーキペダルの偏向s、クラッチペダルの偏向w、又はハンドル角αの変更が、それぞれ、特定の、予め定められた閾値を超えた場合にのみ、運転者の操作が行われていると結論づけることが好都合である。
【0096】
追突の危険性の減少は、たとえば、車両と前方走行車両との間の、時間が経つにつれて増加する距離d、及び/又は車両と前方走行車両との間の相対速度vrelの、時間が経つにつれて減少する絶対値を基準として検出される。本明細書においてはまた、アボート基準は、たとえば、車両と前方走行車両との間の距離dの増加及び/又は車両と前方走行車両との間の相対速度vrelの減少が、予設定された閾値より上にある場合にのみ、満たされる。
【0097】
図2bは、図2aに表されているフローチャートを補足する形の、本発明による方法の代替例示的実施形態を示す図である。運転者に対する警告の第2の警告段階は、本明細書においては、第1の補足ステップ65’で、式(37)又は(42)による、関連する、与えられた第2の警告段階条件が満たされたことが検出された場合にのみ起動される。検出されなかった場合には、第5の補助ステップ84で、第1のタイミングカウンタT1が予設定された警告時間twより低いかどうかが確認される。低い場合には、方法シーケンスは、第1のタイミングカウンタT1が予設定された警告時間twに少なくとも等しくなるまで、第5の補助ステップ84に戻る。等しくなった場合には、その後の第7の補助ステップ88で、運転者に対する警告の第1の警告ステップは中止され、方法シーケンスは、再び第2の主要ステップ61に戻る。本明細書においてはまた、第1の警告段階で出される、運転者に対する視覚及び/又は聴覚的警告は、追突の潜在的な危険性について運転者に指示するために、警告時間twの終了まで維持される。
【0098】
図2cは、図2aに例示されているフローチャートをさらに補足する形の、本発明による方法のさらなる代替例示的実施形態を示す図である。自動非常制動プロセスは、第2の補足ステップ68’で、式(37)又は(42)により、関連する、与えられた非常制動条件が満たされたかどうかが検出された場合にのみ起動される。検出されなかった場合には、第7の補助ステップ86で、運転者に対する警告の第2の警告段階は中止され、方法シーケンスは、再び第2の主要ステップ61に戻る。
【0099】
この場合、図2b及び図2cに示されている例示的実施形態を互いに組み合わせることが考えられる。
【0100】
最後に、図3は、アボート基準が満たされず、かつ自動非常制動プロセスが起動されたことを想定した、本発明による方法の時間系列の例を示す図である。第1の警告段階が起動された場合には、運転者に対する警告は、視覚的に及び/又は聴覚的に知覚できる方法で出され、同時に、第1のタイミングカウンタT1が開始される。第1のタイミングカウンタT1が、第1の予設定された警告段階の時間toaに到達すると、第2の警告段階が起動され、前記警告段階は、部分的制動プロセスの形態で、触覚的に知覚できる方法で出される。同時に、第2のタイミングカウンタT2が開始される。運転者に対する警告の第1の警告段階は継続して維持されるが、第2の警告段階を起動して、前記警告段階を中止することも考えられる。第2のタイミングカウンタが、第2の予設定された警告段階の時間thに到達すると、運転者に対する警告の、第2の警告段階、及び適宜、第1の警告段階は中止され、自動非常制動プロセスが起動される。同時に、非常制動時間カウンタTNBが起動される。非常制動時間カウンタTNBが、決定された非常制動時間TNBに到達すると、運転者に対する警告の第1の警告段階及び自動非常制動プロセスが中止される。
【図面の簡単な説明】
【0101】
【図1】本発明による方法を実施するための装置の例示的実施形態を示す概略図。
【図2a】フローチャートの形態の、本発明による方法の例示的実施形態を示す図。
【図2b】本発明による方法の代替例示的実施形態を示す図。
【図2c】本発明による方法のさらなる代替例示的実施形態を示す図。
【図3】本発明による方法の時間系列の例を示す図。
【特許請求の範囲】
【請求項1】
前方走行車両との追突を回避するための、及び/又は追突の結果を減少させるための、車両の自動非常制動プロセスを起動する方法であって、少なくとも1つの予設定された警告条件が満たされると、運転者に対する警告が起動される方法であって、
前記警告条件が満たされるということは、前記車両の検出された加速度(a)、及び/又は前記車両と前方走行車両との間の検出された相対加速度(arel)、及び予設定された警告時間(tw)が切れた場合の予設定された非常制動減速度(aNB)によって決定された前記車両の瞬間運転状況により、前記自動非常制動プロセスが終了した後の前記車両と前方走行車両との間の予設定された目標相対速度(vrel,z)及び/又は予設定された目標安全距離(dz)を達成する目的で、前記自動非常制動プロセスが起動されるということ、を特徴とする車両の自動非常制動プロセスを起動する方法。
【請求項2】
前記運転者に対する警告が、前記車両の運転者により、視覚的に及び/又は聴覚的に及び/又は触覚的に知覚され得るような方法で行われることを特徴とする請求項1に記載の方法。
【請求項3】
前記車両の運転者により触覚的に知覚され得る、運転者に対する警告が、予設定された部分的制動減速度(aTB)を含む前記車両の部分的制動プロセスの形態で行われ、前記予設定された部分的制動減速度(aTB)が、前記予設定された非常制動減速度(aNB)より小さいことを特徴とする請求項2に記載の方法。
【請求項4】
前記自動非常制動プロセスが、与えられた非常制動条件が満たされた場合、及び前記予設定された警告時間(tw)が切れた場合にのみ起動されることを特徴とする請求項1〜3のいずれか一項に記載の方法。
【請求項5】
前記非常制動減速度(aNB)が、永続的又は調整可能な方法で予設定されることを特徴とする請求項1〜4のいずれか一項に記載の方法。
【請求項6】
前記警告時間(tw)が、永続的又は調整可能な方法で予設定されることを特徴とする請求項1〜5のいずれか一項に記載の方法。
【請求項7】
前記目標相対速度(vrel,z)が、永続的又は調整可能な方法で予設定されることを特徴とする請求項1〜6のいずれか一項に記載の方法。
【請求項8】
前記車両と前方走行車両との間の、永続的に予設定された目標相対速度(vrel,z)の値が、ほぼゼロであることを特徴とする請求項7項に記載の方法。
【請求項9】
前記目標安全距離(dz)が、永続的又は調整可能な方法で予設定されることを特徴とする請求項1〜8のいずれか一項に記載の方法。
【請求項10】
運転者が操作中である場合、及び/又は追突の危険性が減少した場合には、前記運転者に対する警告が起動されないことを特徴とする請求項1〜9のいずれか一項に記載の方法。
【請求項11】
運転者が操作中である場合、及び/又は追突の危険性が減少した場合には、既に起動されている運転者に対する警告が中止される及び/又は変更される、及び/又は前記自動非常制動プロセスが起動されないことを特徴とする請求項1〜10のいずれか一項に記載の方法。
【請求項12】
前記自動非常制動プロセスが、前記運転者に対する警告が前記予設定された警告時間(tw)中にアボートされないと、前記予設定された警告時間(tw)が切れた時に、自動的に起動されることを特徴とする請求項1〜11のいずれか一項に記載の方法。
【請求項13】
決定された非常制動時間(tNB)及び/又は前記予設定された目標相対速度(vrel,z)及び前記予設定された目標安全距離(dz)が達成されると、既に起動されている自動非常制動プロセスが、アボートされることを特徴とする請求項1〜12のいずれか一項に記載の方法。
【請求項14】
前記運転者に対する警告が、前記運転者に対する警告の前記予設定された警告時間(tw)内に時系列的に連続して起動される、少なくとも2つの警告段階からなり、それぞれの警告段階が、予設定された警告段階の時間に割り当てられることを特徴とする請求項1〜13のいずれか一項に記載の方法。
【請求項15】
前記警告段階の時間が、永続的又は調整可能な方法で予設定されることを特徴とする請求項14に記載の方法。
【請求項16】
第1の警告段階が起動された後、それぞれ、さらなる警告段階に割り当てられた、予設定された警告段階条件が満たされた場合にのみ、少なくとも1つのさらなる警告段階が起動されることを特徴とする請求項14あるいは15に記載の方法。
【請求項17】
前記運転者が操作中である場合、及び/又は追突の危険性が減少した場合には、既に起動されている前記警告段階の少なくとも1つが中止される、及び/又はさらなる警告段階が起動されないことを特徴とする請求項14〜16のいずれか一項に記載の方法。
【請求項18】
運転者側の操作が、特に前記車両の長手方向の動力学又は側方動力学を変更するために使用される、少なくとも1つのオペレータ制御要素の作動に基づいて検出されることを特徴とする請求項1〜17のいずれか一項に記載の方法。
【請求項19】
追突の危険性の減少が、前記車両と前方走行車両との間の、時間が経つにつれて増加する距離(d)、及び/又は前記車両と前方走行車両との間の、時間が経つにつれて減少する相対速度(vrel)を基準として検出されることを特徴とする請求項1〜18のいずれか一項に記載の方法。
【請求項20】
前記車両の瞬間運転状況が、前記車両と前方走行車両との間の検出された距離(d)、及び/又は前記車両と前方走行車両との間の検出された相対速度(vrel)、及び/又は前記車両の検出された速度(v)、及び/又は前記車両と前方走行車両との間の検出された相対加速度(arel)、及び/又は前記車両の検出された加速度(a)、及び/又は車道の傾斜、及び/又は車道と前記車両の車輪との間の摩擦係数に応じて決定されることを特徴とする請求項1〜19のいずれか一項に記載の方法。
【請求項21】
前記自動非常制動プロセスが起動された場合に、警告が、前方走行車両及び/又は後方走行車両に出されることを特徴とする請求項1〜20のいずれか一項に記載の方法。
【請求項22】
前方走行車両との追突を回避するための、及び/又は追突の結果を減少させるための、車両の自動非常制動プロセスを実施するための、評価ユニット(7)を備え、前記評価ユニット(7)内に格納されている警告条件が満たされた場合に、運転者に対する警告が前記評価ユニット(7)によって起動される装置であって、
前記評価ユニット(7)内に格納されている、予設定された前記警告条件が満たされるということは、前記車両の検出された加速度(a)、及び/又は前記車両と前方走行車両との間の検出された相対加速度(arel)、及び予設定された警告時間(tw)が切れた場合の、予設定された非常制動減速度(aNB)によって決定される、前記車両の瞬間運転状況により、前記自動非常制動プロセスが終了した後の前記車両と前方走行車両との間の予設定された目標相対速度(vrel,z)及び/又は予設定された目標安全距離(dz)を達成するという目的で、自動非常制動プロセスが前記評価ユニット(7)により前記車両の制動手段(38)の適切な作動によって起動されること、を特徴とする装置。
【特許請求の範囲】
【請求項1】
前方走行車両との追突を回避するための、及び/又は追突の結果を減少させるための、車両の自動非常制動プロセスを起動する方法であって、少なくとも1つの予設定された警告条件が満たされると、運転者に対する警告が起動され、前記警告条件が満たされるということは、前記車両の検出された加速度(a)、及び予設定された非常制動減速度(aNB)によって決定された前記車両の運転状況により、前記自動非常制動プロセスが起動されるということであり、前記警告条件は、目標条件として、前記自動非常制動プロセスが終了した後に達成されるべき、前記車両と前方走行車両との間の予設定された目標安全距離(dz)及び予設定された目標相対速度(vrel,z)を含む方法であって、
前記車両の検出された加速度(a)に加えて、前記車両と前方走行車両との間の、検出された現在の相対加速度(arel)が、前記警告条件内に含まれる前記車両の瞬間運転状況を決定するために考慮され、前記自動非常制動プロセスが、前記運転者に対する警告が起動された後、予設定された警告時間(tw)が切れるまで起動されないことを特徴とする方法。
【請求項2】
前記運転者に対する警告が、前記車両の運転者により、視覚的に及び/又は聴覚的に及び/又は触覚的に知覚され得るような方法で行われることを特徴とする請求項1に記載の方法。
【請求項3】
前記車両の運転者により触覚的に知覚され得る、運転者に対する警告が、予設定された部分的制動減速度(aTB)を含む前記車両の部分的制動プロセスの形態で行われ、前記予設定された部分的制動減速度(aTB)が、前記予設定された非常制動減速度(aNB)より小さいことを特徴とする請求項2に記載の方法。
【請求項4】
前記自動非常制動プロセスが、与えられた非常制動条件が満たされた場合、及び前記予設定された警告時間(tw)が切れた場合にのみ起動されることを特徴とする請求項1〜3のいずれか一項に記載の方法。
【請求項5】
前記非常制動減速度(aNB)が、永続的又は調整可能な方法で予設定されることを特徴とする請求項1〜4のいずれか一項に記載の方法。
【請求項6】
前記警告時間(tw)が、永続的又は調整可能な方法で予設定されることを特徴とする請求項1〜5のいずれか一項に記載の方法。
【請求項7】
前記目標相対速度(vrel,z)が、永続的又は調整可能な方法で予設定されることを特徴とする請求項1〜6のいずれか一項に記載の方法。
【請求項8】
前記車両と前方走行車両との間の、永続的に予設定された目標相対速度(vrel,z)の値が、ほぼゼロであることを特徴とする請求項7項に記載の方法。
【請求項9】
前記目標安全距離(dz)が、永続的又は調整可能な方法で予設定されることを特徴とする請求項1〜8のいずれか一項に記載の方法。
【請求項10】
運転者が操作中である場合、及び/又は追突の危険性が減少した場合には、前記運転者に対する警告が起動されないことを特徴とする請求項1〜9のいずれか一項に記載の方法。
【請求項11】
運転者が操作中である場合、及び/又は追突の危険性が減少した場合には、既に起動されている運転者に対する警告が中止される及び/又は変更される、及び/又は前記自動非常制動プロセスが起動されないことを特徴とする請求項1〜10のいずれか一項に記載の方法。
【請求項12】
前記自動非常制動プロセスが、前記運転者に対する警告が前記予設定された警告時間(tw)中にアボートされないと、前記予設定された警告時間(tw)が切れた時に、自動的に起動されることを特徴とする請求項1〜11のいずれか一項に記載の方法。
【請求項13】
決定された非常制動時間(tNB)及び/又は前記予設定された目標相対速度(vrel,z)及び前記予設定された目標安全距離(dz)が達成されると、既に起動されている自動非常制動プロセスが、アボートされることを特徴とする請求項1〜12のいずれか一項に記載の方法。
【請求項14】
前記運転者に対する警告が、前記運転者に対する警告の前記予設定された警告時間(tw)内に時系列的に連続して起動される、少なくとも2つの警告段階からなり、それぞれの警告段階が、予設定された警告段階の時間に割り当てられることを特徴とする請求項1〜13のいずれか一項に記載の方法。
【請求項15】
前記警告段階の時間が、永続的又は調整可能な方法で予設定されることを特徴とする請求項14に記載の方法。
【請求項16】
第1の警告段階が起動された後、それぞれ、さらなる警告段階に割り当てられた、予設定された警告段階条件が満たされた場合にのみ、少なくとも1つのさらなる警告段階が起動されることを特徴とする請求項14あるいは15に記載の方法。
【請求項17】
前記運転者が操作中である場合、及び/又は追突の危険性が減少した場合には、既に起動されている前記警告段階の少なくとも1つが中止される、及び/又はさらなる警告段階が起動されないことを特徴とする請求項14〜16のいずれか一項に記載の方法。
【請求項18】
運転者側の操作が、特に前記車両の長手方向の動力学又は側方動力学を変更するために使用される、少なくとも1つのオペレータ制御要素の作動に基づいて検出されることを特徴とする請求項1〜17のいずれか一項に記載の方法。
【請求項19】
追突の危険性の減少が、前記車両と前方走行車両との間の、時間が経つにつれて増加する距離(d)、及び/又は前記車両と前方走行車両との間の、時間が経つにつれて減少する相対速度(vrel)を基準として検出されることを特徴とする請求項1〜18のいずれか一項に記載の方法。
【請求項20】
前記車両の瞬間運転状況が、前記車両と前記前方走行車両との間の検出された距離(d)、及び/又は前記車両と前方走行車両との間の検出された相対速度(vrel)、及び/又は前記車両の検出された速度(v)、及び/又は前記車両と前方走行車両との間の検出された相対加速度(arel)、及び/又は前記車両の検出された加速度(a)、及び/又は車道の傾斜、及び/又は車道と前記車両の車輪との間の摩擦係数に応じて決定されることを特徴とする請求項1〜19のいずれか一項に記載の方法。
【請求項21】
前記自動非常制動プロセスが起動された場合に、警告が、前方走行車両及び/又は後方走行車両に出されることを特徴とする請求項1〜20のいずれか一項に記載の方法。
【請求項22】
前方走行車両との追突を回避するための、及び/又は追突の結果を減少させるための、車両の自動非常制動プロセスを実施するための、評価ユニット(7)を備えた装置であって、前記評価ユニット(7)内に格納されている予設定された警告条件が満たされた場合に、運転者に対する警告が前記評価ユニット(7)によって起動され、前記警告条件が満たされるということは、前記車両の検出された加速度(a)、及び予め検出された非常制動減速度(aNB)によって決定された前記車両の瞬間運転状況により、前記自動非常制動プロセスが、前記評価ユニット(7)により前記車両の制動手段(38)の適切な作動によって起動されるということであり、前記警告条件は、目標条件として前記自動非常制動プロセスが終了した場合に達成されるべき、前記車両と前方走行車両との間の予設定された目標安全距離(dz)及び予設定された目標相対速度(vrel,z)を含む装置であって、
前記車両の検出された加速度(a)に加えて、前記車両と前方走行車両との間の、検出された現在の相対加速度(arel)が、前記警告条件内に含まれる前記車両の瞬間運転状況を決定する際に考慮され、前記自動非常制動プロセスが、前記運転者に対する警告が起動された後、予設定された警告時間(tw)が切れるまで起動されないことを特徴とする装置。
【請求項1】
前方走行車両との追突を回避するための、及び/又は追突の結果を減少させるための、車両の自動非常制動プロセスを起動する方法であって、少なくとも1つの予設定された警告条件が満たされると、運転者に対する警告が起動される方法であって、
前記警告条件が満たされるということは、前記車両の検出された加速度(a)、及び/又は前記車両と前方走行車両との間の検出された相対加速度(arel)、及び予設定された警告時間(tw)が切れた場合の予設定された非常制動減速度(aNB)によって決定された前記車両の瞬間運転状況により、前記自動非常制動プロセスが終了した後の前記車両と前方走行車両との間の予設定された目標相対速度(vrel,z)及び/又は予設定された目標安全距離(dz)を達成する目的で、前記自動非常制動プロセスが起動されるということ、を特徴とする車両の自動非常制動プロセスを起動する方法。
【請求項2】
前記運転者に対する警告が、前記車両の運転者により、視覚的に及び/又は聴覚的に及び/又は触覚的に知覚され得るような方法で行われることを特徴とする請求項1に記載の方法。
【請求項3】
前記車両の運転者により触覚的に知覚され得る、運転者に対する警告が、予設定された部分的制動減速度(aTB)を含む前記車両の部分的制動プロセスの形態で行われ、前記予設定された部分的制動減速度(aTB)が、前記予設定された非常制動減速度(aNB)より小さいことを特徴とする請求項2に記載の方法。
【請求項4】
前記自動非常制動プロセスが、与えられた非常制動条件が満たされた場合、及び前記予設定された警告時間(tw)が切れた場合にのみ起動されることを特徴とする請求項1〜3のいずれか一項に記載の方法。
【請求項5】
前記非常制動減速度(aNB)が、永続的又は調整可能な方法で予設定されることを特徴とする請求項1〜4のいずれか一項に記載の方法。
【請求項6】
前記警告時間(tw)が、永続的又は調整可能な方法で予設定されることを特徴とする請求項1〜5のいずれか一項に記載の方法。
【請求項7】
前記目標相対速度(vrel,z)が、永続的又は調整可能な方法で予設定されることを特徴とする請求項1〜6のいずれか一項に記載の方法。
【請求項8】
前記車両と前方走行車両との間の、永続的に予設定された目標相対速度(vrel,z)の値が、ほぼゼロであることを特徴とする請求項7項に記載の方法。
【請求項9】
前記目標安全距離(dz)が、永続的又は調整可能な方法で予設定されることを特徴とする請求項1〜8のいずれか一項に記載の方法。
【請求項10】
運転者が操作中である場合、及び/又は追突の危険性が減少した場合には、前記運転者に対する警告が起動されないことを特徴とする請求項1〜9のいずれか一項に記載の方法。
【請求項11】
運転者が操作中である場合、及び/又は追突の危険性が減少した場合には、既に起動されている運転者に対する警告が中止される及び/又は変更される、及び/又は前記自動非常制動プロセスが起動されないことを特徴とする請求項1〜10のいずれか一項に記載の方法。
【請求項12】
前記自動非常制動プロセスが、前記運転者に対する警告が前記予設定された警告時間(tw)中にアボートされないと、前記予設定された警告時間(tw)が切れた時に、自動的に起動されることを特徴とする請求項1〜11のいずれか一項に記載の方法。
【請求項13】
決定された非常制動時間(tNB)及び/又は前記予設定された目標相対速度(vrel,z)及び前記予設定された目標安全距離(dz)が達成されると、既に起動されている自動非常制動プロセスが、アボートされることを特徴とする請求項1〜12のいずれか一項に記載の方法。
【請求項14】
前記運転者に対する警告が、前記運転者に対する警告の前記予設定された警告時間(tw)内に時系列的に連続して起動される、少なくとも2つの警告段階からなり、それぞれの警告段階が、予設定された警告段階の時間に割り当てられることを特徴とする請求項1〜13のいずれか一項に記載の方法。
【請求項15】
前記警告段階の時間が、永続的又は調整可能な方法で予設定されることを特徴とする請求項14に記載の方法。
【請求項16】
第1の警告段階が起動された後、それぞれ、さらなる警告段階に割り当てられた、予設定された警告段階条件が満たされた場合にのみ、少なくとも1つのさらなる警告段階が起動されることを特徴とする請求項14あるいは15に記載の方法。
【請求項17】
前記運転者が操作中である場合、及び/又は追突の危険性が減少した場合には、既に起動されている前記警告段階の少なくとも1つが中止される、及び/又はさらなる警告段階が起動されないことを特徴とする請求項14〜16のいずれか一項に記載の方法。
【請求項18】
運転者側の操作が、特に前記車両の長手方向の動力学又は側方動力学を変更するために使用される、少なくとも1つのオペレータ制御要素の作動に基づいて検出されることを特徴とする請求項1〜17のいずれか一項に記載の方法。
【請求項19】
追突の危険性の減少が、前記車両と前方走行車両との間の、時間が経つにつれて増加する距離(d)、及び/又は前記車両と前方走行車両との間の、時間が経つにつれて減少する相対速度(vrel)を基準として検出されることを特徴とする請求項1〜18のいずれか一項に記載の方法。
【請求項20】
前記車両の瞬間運転状況が、前記車両と前方走行車両との間の検出された距離(d)、及び/又は前記車両と前方走行車両との間の検出された相対速度(vrel)、及び/又は前記車両の検出された速度(v)、及び/又は前記車両と前方走行車両との間の検出された相対加速度(arel)、及び/又は前記車両の検出された加速度(a)、及び/又は車道の傾斜、及び/又は車道と前記車両の車輪との間の摩擦係数に応じて決定されることを特徴とする請求項1〜19のいずれか一項に記載の方法。
【請求項21】
前記自動非常制動プロセスが起動された場合に、警告が、前方走行車両及び/又は後方走行車両に出されることを特徴とする請求項1〜20のいずれか一項に記載の方法。
【請求項22】
前方走行車両との追突を回避するための、及び/又は追突の結果を減少させるための、車両の自動非常制動プロセスを実施するための、評価ユニット(7)を備え、前記評価ユニット(7)内に格納されている警告条件が満たされた場合に、運転者に対する警告が前記評価ユニット(7)によって起動される装置であって、
前記評価ユニット(7)内に格納されている、予設定された前記警告条件が満たされるということは、前記車両の検出された加速度(a)、及び/又は前記車両と前方走行車両との間の検出された相対加速度(arel)、及び予設定された警告時間(tw)が切れた場合の、予設定された非常制動減速度(aNB)によって決定される、前記車両の瞬間運転状況により、前記自動非常制動プロセスが終了した後の前記車両と前方走行車両との間の予設定された目標相対速度(vrel,z)及び/又は予設定された目標安全距離(dz)を達成するという目的で、自動非常制動プロセスが前記評価ユニット(7)により前記車両の制動手段(38)の適切な作動によって起動されること、を特徴とする装置。
【特許請求の範囲】
【請求項1】
前方走行車両との追突を回避するための、及び/又は追突の結果を減少させるための、車両の自動非常制動プロセスを起動する方法であって、少なくとも1つの予設定された警告条件が満たされると、運転者に対する警告が起動され、前記警告条件が満たされるということは、前記車両の検出された加速度(a)、及び予設定された非常制動減速度(aNB)によって決定された前記車両の運転状況により、前記自動非常制動プロセスが起動されるということであり、前記警告条件は、目標条件として、前記自動非常制動プロセスが終了した後に達成されるべき、前記車両と前方走行車両との間の予設定された目標安全距離(dz)及び予設定された目標相対速度(vrel,z)を含む方法であって、
前記車両の検出された加速度(a)に加えて、前記車両と前方走行車両との間の、検出された現在の相対加速度(arel)が、前記警告条件内に含まれる前記車両の瞬間運転状況を決定するために考慮され、前記自動非常制動プロセスが、前記運転者に対する警告が起動された後、予設定された警告時間(tw)が切れるまで起動されないことを特徴とする方法。
【請求項2】
前記運転者に対する警告が、前記車両の運転者により、視覚的に及び/又は聴覚的に及び/又は触覚的に知覚され得るような方法で行われることを特徴とする請求項1に記載の方法。
【請求項3】
前記車両の運転者により触覚的に知覚され得る、運転者に対する警告が、予設定された部分的制動減速度(aTB)を含む前記車両の部分的制動プロセスの形態で行われ、前記予設定された部分的制動減速度(aTB)が、前記予設定された非常制動減速度(aNB)より小さいことを特徴とする請求項2に記載の方法。
【請求項4】
前記自動非常制動プロセスが、与えられた非常制動条件が満たされた場合、及び前記予設定された警告時間(tw)が切れた場合にのみ起動されることを特徴とする請求項1〜3のいずれか一項に記載の方法。
【請求項5】
前記非常制動減速度(aNB)が、永続的又は調整可能な方法で予設定されることを特徴とする請求項1〜4のいずれか一項に記載の方法。
【請求項6】
前記警告時間(tw)が、永続的又は調整可能な方法で予設定されることを特徴とする請求項1〜5のいずれか一項に記載の方法。
【請求項7】
前記目標相対速度(vrel,z)が、永続的又は調整可能な方法で予設定されることを特徴とする請求項1〜6のいずれか一項に記載の方法。
【請求項8】
前記車両と前方走行車両との間の、永続的に予設定された目標相対速度(vrel,z)の値が、ほぼゼロであることを特徴とする請求項7項に記載の方法。
【請求項9】
前記目標安全距離(dz)が、永続的又は調整可能な方法で予設定されることを特徴とする請求項1〜8のいずれか一項に記載の方法。
【請求項10】
運転者が操作中である場合、及び/又は追突の危険性が減少した場合には、前記運転者に対する警告が起動されないことを特徴とする請求項1〜9のいずれか一項に記載の方法。
【請求項11】
運転者が操作中である場合、及び/又は追突の危険性が減少した場合には、既に起動されている運転者に対する警告が中止される及び/又は変更される、及び/又は前記自動非常制動プロセスが起動されないことを特徴とする請求項1〜10のいずれか一項に記載の方法。
【請求項12】
前記自動非常制動プロセスが、前記運転者に対する警告が前記予設定された警告時間(tw)中にアボートされないと、前記予設定された警告時間(tw)が切れた時に、自動的に起動されることを特徴とする請求項1〜11のいずれか一項に記載の方法。
【請求項13】
決定された非常制動時間(tNB)及び/又は前記予設定された目標相対速度(vrel,z)及び前記予設定された目標安全距離(dz)が達成されると、既に起動されている自動非常制動プロセスが、アボートされることを特徴とする請求項1〜12のいずれか一項に記載の方法。
【請求項14】
前記運転者に対する警告が、前記運転者に対する警告の前記予設定された警告時間(tw)内に時系列的に連続して起動される、少なくとも2つの警告段階からなり、それぞれの警告段階が、予設定された警告段階の時間に割り当てられることを特徴とする請求項1〜13のいずれか一項に記載の方法。
【請求項15】
前記警告段階の時間が、永続的又は調整可能な方法で予設定されることを特徴とする請求項14に記載の方法。
【請求項16】
第1の警告段階が起動された後、それぞれ、さらなる警告段階に割り当てられた、予設定された警告段階条件が満たされた場合にのみ、少なくとも1つのさらなる警告段階が起動されることを特徴とする請求項14あるいは15に記載の方法。
【請求項17】
前記運転者が操作中である場合、及び/又は追突の危険性が減少した場合には、既に起動されている前記警告段階の少なくとも1つが中止される、及び/又はさらなる警告段階が起動されないことを特徴とする請求項14〜16のいずれか一項に記載の方法。
【請求項18】
運転者側の操作が、特に前記車両の長手方向の動力学又は側方動力学を変更するために使用される、少なくとも1つのオペレータ制御要素の作動に基づいて検出されることを特徴とする請求項1〜17のいずれか一項に記載の方法。
【請求項19】
追突の危険性の減少が、前記車両と前方走行車両との間の、時間が経つにつれて増加する距離(d)、及び/又は前記車両と前方走行車両との間の、時間が経つにつれて減少する相対速度(vrel)を基準として検出されることを特徴とする請求項1〜18のいずれか一項に記載の方法。
【請求項20】
前記車両の瞬間運転状況が、前記車両と前記前方走行車両との間の検出された距離(d)、及び/又は前記車両と前方走行車両との間の検出された相対速度(vrel)、及び/又は前記車両の検出された速度(v)、及び/又は前記車両と前方走行車両との間の検出された相対加速度(arel)、及び/又は前記車両の検出された加速度(a)、及び/又は車道の傾斜、及び/又は車道と前記車両の車輪との間の摩擦係数に応じて決定されることを特徴とする請求項1〜19のいずれか一項に記載の方法。
【請求項21】
前記自動非常制動プロセスが起動された場合に、警告が、前方走行車両及び/又は後方走行車両に出されることを特徴とする請求項1〜20のいずれか一項に記載の方法。
【請求項22】
前方走行車両との追突を回避するための、及び/又は追突の結果を減少させるための、車両の自動非常制動プロセスを実施するための、評価ユニット(7)を備えた装置であって、前記評価ユニット(7)内に格納されている予設定された警告条件が満たされた場合に、運転者に対する警告が前記評価ユニット(7)によって起動され、前記警告条件が満たされるということは、前記車両の検出された加速度(a)、及び予め検出された非常制動減速度(aNB)によって決定された前記車両の瞬間運転状況により、前記自動非常制動プロセスが、前記評価ユニット(7)により前記車両の制動手段(38)の適切な作動によって起動されるということであり、前記警告条件は、目標条件として前記自動非常制動プロセスが終了した場合に達成されるべき、前記車両と前方走行車両との間の予設定された目標安全距離(dz)及び予設定された目標相対速度(vrel,z)を含む装置であって、
前記車両の検出された加速度(a)に加えて、前記車両と前方走行車両との間の、検出された現在の相対加速度(arel)が、前記警告条件内に含まれる前記車両の瞬間運転状況を決定する際に考慮され、前記自動非常制動プロセスが、前記運転者に対する警告が起動された後、予設定された警告時間(tw)が切れるまで起動されないことを特徴とする装置。
【図1】

【図2a】

【図2b】
【図2c】
【図3】
【図2a】
【図2b】
【図2c】
【図3】
【公表番号】特表2006−500270(P2006−500270A)
【公表日】平成18年1月5日(2006.1.5)
【国際特許分類】
【出願番号】特願2004−538855(P2004−538855)
【出願日】平成15年8月30日(2003.8.30)
【国際出願番号】PCT/EP2003/009643
【国際公開番号】WO2004/028847
【国際公開日】平成16年4月8日(2004.4.8)
【出願人】(598051819)ダイムラークライスラー・アクチェンゲゼルシャフト (1,147)
【Fターム(参考)】
【公表日】平成18年1月5日(2006.1.5)
【国際特許分類】
【出願日】平成15年8月30日(2003.8.30)
【国際出願番号】PCT/EP2003/009643
【国際公開番号】WO2004/028847
【国際公開日】平成16年4月8日(2004.4.8)
【出願人】(598051819)ダイムラークライスラー・アクチェンゲゼルシャフト (1,147)
【Fターム(参考)】
[ Back to top ]