
車両の衝突を阻止する方法および装置
車両の衝突を阻止するための方法では、まず車両2の周囲状況と車両2の運動量がセンサ2.1,2.2,2.3,2.4,2.5によって検出される。これらのセンサの出力信号から優先交通違反度と衝突危険度が導出される。優先交通違反度と衝突危険度の組合せから危険段階が検出される。それぞれ検出された危険段階に依存して最終的に衝突危険性を低減するためのステップが開始される。

【発明の詳細な説明】
【技術分野】
【0001】
本出願人のDE19736774A1から、自動車における情報指示方法が公知であり、この方法により画像ベースの走行路追跡が可能である。このために車両に固定されたビデオカメラが設けられており、このビデオカメラは車両前方の走行路を交通標識も含めて撮影する。ビデオカメラから送出されたビデオ信号は規則に反する走行状態について評価される。規則に反する走行行動、例えば許容されない速度超過、または追い越し禁止道路区間での追い越し過程が識別されると、警報信号が運転者に対して形成される。
【0002】
DE29802953U1からも、交通標識を識別し、それをディスプレイに表示するための電子システムが公知である。
【0003】
同一出願人によるDE29902457U1からもさらに、ビデオ信号を発生するためのカメラ装置を有する周囲状況識別装置が公知である。この装置は重なり合う視野を備える少なくとも2つのカメラを有している。これらのカメラは立体ビデオシーケンスを画像処理ユニットに送出し、画像処理ユニットは3次元パターン識別と画像処理によって交通標識を検出し、分類する。交通標識の他に、この装置は同時に車両前方を走行する車両ないし前方に存在する車両を識別することができ、交通状況に応じて警報信号を出力し、ないしは車両の動作状態にアクティブに介入する。この種のアクティブ介入として、発進および停止時または渋滞走行時に車両のブレーキおよび機関制御部に介入する車間制御、または自動操舵制御が記載されている。
【0004】
US6049295A1から、交通標識のない交差点または見通しの悪い道路区間を走行する車両間での衝突を阻止する方法が公知である。この方法は道路固定された装置と車両に接続された装置を必要とし、これらの装置は無線を介して相互に接続される。
【0005】
DE19830547A1からさらに交差点警報システムが公知である。このシステムも同様に道路側と車両側の装置に基づくものである。
【0006】
発明の利点
本発明は、本出願人により公知のシステムをさらに発展させたものであり、右左折運転時の優先交通違反および運転者エラーによる事故を回避するのを支援するものである。本発明は、交通標識および信号機を車両自律的に識別し、他車とその運動パラメータを車両自律的に識別し、並びに自車の運動パラメータを考慮することによって、優先交通違反の程度および衝突危険度の程度、ないしは注目度と衝突危険度を検出することができ、これらかさらに危険段階を導出することができるという知識から出発するものである。導出された危険段階に依存して有利には切迫する衝突を回避するための対抗措置を取ることができる。
【0007】
例えば危険度が比較的小さい場合には、運転者に対し光学的および/または音響的信号によって危険状況について注意を喚起することができる。
【0008】
別の拡大段階では、ブレーキシューをブレーキディスクおよびブレーキドラムに当接することにより(プレフィル)、および場合によりブレーキアシストの閾値をその有利な使用に適合することにより車両の制動装置を準備することができる。
【0009】
さらに運転者の注意を触覚信号の出力により、例えば警報制動および/または機関のスロットリングによりさらに高めることができる。
【0010】
操舵および/または制動を介しても車両運動を調整することができる。
【0011】
さらに非可逆的な乗員保護システム、例えばシートベルトテンショナおよびエアバッグを、変更可能な閾値の適合によってその有利な使用について準備することができる。
【0012】
さらに非可逆的乗員保護システムを乗員保護のためにトリガすることができる。
【0013】
図面
本発明の方法および装置を図面に示された実施例に基づき説明する。
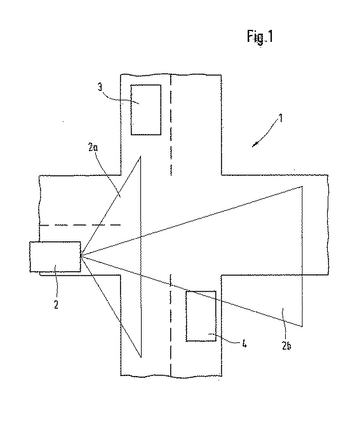
図1は、交差点での交通状況を示す概略図である。
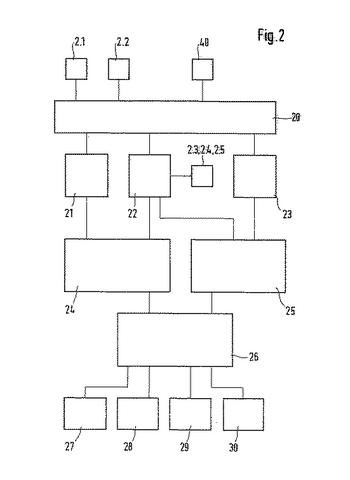
図2は、交差点交通での衝突回避を説明するための第1のブロック回路図である。
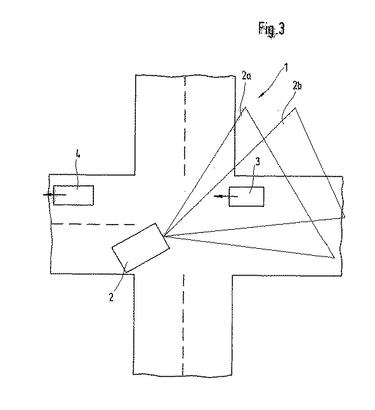
図3は、右左折運転を伴う交通状況を示す概略図である。
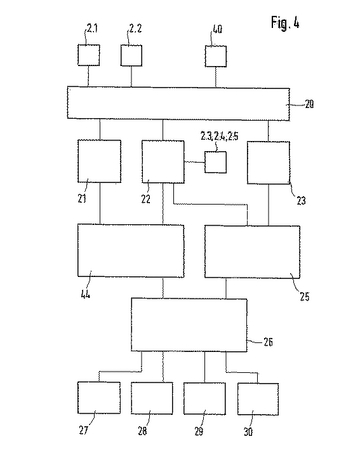
図4は、右左折運転での衝突回避を説明するための第2のブロック回路図である。
【0014】
実施例の説明
本発明の第1実施例を図1と図2に基づいて説明する。ここでは交差点領域での衝突を回避できる。図1は概略的に示された交差点1での交通状況を示す。この交差点1ではそれぞれ2車線の道路が相互に交差する。東西方向に延在する道路では第1の車両2(自車)が交差点1に接近する。南北方向に延在する道路では第2の車両3並びに第3の車両4が対向して交差点に接近する。車両2では本発明の解決手段が実現されている。車両2にはこのために多数のセンサシステムが装備されている。例えば車両2は少なくとも1つの車両固定されたビデオシステム2.1を有し、このビデオシステムは検出領域2aを備えている。さらに検出領域2bを備える車両固定されたレーダシステム2.2を設けることができる。ここで検出領域2a,2bは異なる距離で車両2の走行方向に伸長している。ビデオシステム2.1は近距離領域を検出するためのものであり、レーダシステム2.1はさらに離れた距離領域を検出するために設けられている。択一的にまたは付加的に赤外線システムおよびライダーシステムを設けることができるが、これらはここには固有の参照符号により示されていない。車両2はさらに別のセンサシステム、例えば車輪回転数センサ2.3、ヨーイング速度センサ2.4、並びに操舵角センサ2.5を備えており、これらはすでに従来のABSシステムおよびASRシステムから公知である。
【0015】
図2は交差点交通での衝突回避を説明するためのブロック回路図である。周囲状況センサ系はビデオシステム2.1とレーダシステム2.2からなり、機能モジュール20と接続されている。この機能モジュールはこれら公知のシステムの出力信号を処理する。機能モジュール20は別の機能モジュール21と接続されており、この別の機能モジュール21には機能モジュール20の出力信号が供給され、この出力信号が走行路および交通標識の識別のために評価される。
【0016】
さらに機能モジュール20は機能モジュール22と接続されており、この機能モジュール22には一方で機能モジュール20の出力信号が、他方で別のセンサ、すなわちヨーイング速度センサ2.4および操舵角センサ2.5の出力信号が供給される。機能モジュール2は自車2の運動識別および運転者意思の識別に用いられる。さらに機能モジュール20は機能モジュール23と接続されており、この機能モジュール23は機能モジュール20の出力信号から横方向交通についての情報を獲得する。機能モジュール21と22は出力側で別の機能モジュール24と接続されており、この別の機能モジュール24は優先交通誤判断度の検出に用いられる。さらに機能モジュール22は機能モジュール23と共に別の機能モジュール25と接続されている。この機能モジュール25は衝突危険度の検出に用いられる。機能モジュール24と25はさらに機能モジュール26と接続されており、この機能モジュール26は危険段階の検出に用いられる。機能モジュール26の出力側は複数の機能モジュール27,28,29,30と接続されている。ここで機能モジュール27は光学的、音響的、触覚的シグナリングに用いられる。機能モジュール28は乗員保護システムを制御し、機能モジュール29は機関制御部に影響を与える。最後に機能モジュール30はブレーキシステムに作用する。
【0017】
以下、交差点領域における衝突阻止のための方法を詳細に説明する。交差点1に接近すると車両2のビデオシステム2.1は交通標識、および信号機が存在する場合にはその光信号を検出する。付加的に走行路縁部の経過、および相応のマーキングまたは同等の境界が存在する場合には車線の経過も検出する。ビデオシステム2.1の出力信号は機能モジュール20で処理され、機能モジュール21で評価される。ビデオシステム2.1の出力信号の評価により、車両2がどの車線でどのように交差点1に接近しているかが識別される。さらにどのような交通規則を場合により存在する交通標識が規定し、信号機がどの信号位置を有しているかが識別される。図1に第2の車両3および第3の車両4により示されるように南北方向に横方向交通が存在すれば、この車両3,4も同様にビデオシステム2.1および場合により付加的に設けられたレーダシステム2.2により検出される。前記システムの出力信号は機能モジュール20により処理され、機能モジュール23により評価される。横方向交通にあるこの種の車両3,4の評価の他に付加的に来られた車両の運動パラメータ、例えば速度、加速度並びに場合により並進運動量と回転運動量を検出する。これらの測定データにより車両2は、車両3,4の将来的走行行動を大きな信頼性を以て予測することができる。さらに別の車両固有のセンサ、例えば車輪回転数センサ2.3、ヨーイング速度センサ2.4、操舵角センサ2.5、並びに機能モジュール22によって自車2の運動状態と運転者意思が求められる。
【0018】
例えば右左折意思を、運転者により以前に操作された走行方向指示器の位置または車線経過に関連する予測的車両運動に基づいて識別することができる。このことは、交通信号機により交通整理される交差点ではしばしば複数の走行方向が1つの車線を分け合い、この異なる方向に対して信号が異なることもあり得るので有利である。例えば信号機が右折車に対して緑であり、他の走行方向に対しては赤を指示することがある。機能モジュール21は機能モジュール20の出力信号から、交差点1に接近する自車2が優先交通権を有するか否かを検出する。ここで例えば、自車2が優先交通権を有していないことが判明すれば、機能モジュール24で機能モジュール21と22の出力信号から優先交通違反度が検出される。この優先交通違反度は自車2の運動データ、例えば接近速度と加速度、並びに交差点1までの車両2の距離から検出される。ここでは付加的に運転者の反応、例えばステアリングの切れ角、アクセルペダルまたはブレーキペダルの操作等が考慮される。さらに横方向交通の存在(車両3,4)が交差点1の領域で識別されると(機能モジュール23)、自車2と他車3,4の運動データ、すなわち機能モジュール22,23の出力信号から、機能モジュール25で衝突危険度が検出される。この衝突危険度は実際には、自車2と他車3,4とが衝突する確率に対する尺度である。
【0019】
ここで各計算時点では自車2と他車3,4との間隔および運動量が測定値から検出される。これらのデータによって関与する車両2,3,4の運動軌道が予測される。ここではとりわけ、車両2,3,4が異なる運動自由度を有することができることを考慮する。すなわちこれらの車両は縦方向および/または横方向に加速することがある。前提とされる快適限界の枠内で、すなわち車両常客に対して許容可能な限界値の枠内で、縦方向では2.5ms−2までの加速度値が、横方向では5ms−2までの加速度値が前提とされる。このことにより関与する車両が将来の時点で存在し得る領域の大きさが予測時間と共に増加する。
【0020】
衝突危険度の計算に対して特に有利な方法は、関与する車両の将来的存在領域の重なり合い率を比較する。衝突危険度の検出に対する別の有利な方法では、他車3,4の存在領域に入り込む自車2の可能な運動軌道を除去する。この衝突危険度によって、残っている軌道の数と、付加的に各潜在的走行操縦に対してもたらすべき加速度が評価される。この加速度が大きければ危険性も高く、従って衝突危険度も高くなる。すでに上に述べたように、優先交通違反度も同等の視点から検出される。しかしここで考察すべき状況はより単純である。なぜなら交通標識および/または信号機は位置固定された対象物だからであり、その空間的広がりはせいぜいのところ停止線を含むだけだからである。
【0021】
所定の制御機構を用いて、衝突危険度と優先交通違反度から機能モジュール26で自車2に対する危険段階が検出される。検出された危険段階は対抗措置に配属される。この対抗措置は機能モジュール27,28,29,30により実行される。例えば優先交通違反度が所定値1よりも大きな値2に達するとする。同時に衝突危険度が所定値3よりも大きな値に達するとする。優先交通違反度と衝突危険度とのこの組合せは危険段階Aに分類される。危険段階Aを検出したことに対する応答として、本発明の実施例では運転者に対し衝突が切迫していることが警告される。この種の警告は機能モジュール27により発せられる。運転者に優先交通違反と、このことにより惹起される衝突の危険を警告するためにここでは種々の知覚チャネルが使用される。運転者は一方では音響的信号、例えば信号音または人工音声により警告される。さらに運転者は、光学的信号例えば警報ランプにより、または人工的交通標識をディスプレイ、とりわけヘッドアップディスプレイに指示することにより警告を受け取ることができる。さらに運転者には触覚的信号、例えばアクセルペダルまたはステアリングコラムの振動により警告を与えることができる。
【0022】
運転者への警告を別にしても、車両2を切迫する非常事態に対して早期に準備することができる。例えば危険段階Bでは制動過程を、ブレーキシューの当接(プレフィル)および/またはブレーキアシストの閾値の変更によって準備することができる。これに対しては機能モジュール30が担当する。
【0023】
危険段階Cでは、機能モジュール28により乗員保護システム、例えばエアバッグおよびシートベルトテンショナのトリガ閾値が、感度が比較的に高くなるように変更される。
【0024】
危険段階Dでは、機能モジュール27によって機関制御部への介入が行われ、機関の駆動トルクが低減される。
【0025】
危険段階Eでは、機能モジュール30を介してブレーキ制御部への介入が行われ、まず警告制動がトリガされ、これにより運転者の反応準備性を制動過程に集中させる。ポジティブな副作用として、この際に車両の運動エネルギーの一部をすでに奪うことができる。
【0026】
危険段階Fでは、機能モジュール28のスイッチオンの下で可逆的乗員保護システム、例えばシートベルトテンショナがトリガされる。
【0027】
最後に危険段階Gでは、車両運動自体を強力に制御する。運転者が例えば一時停止標識に接近する際、または赤信号に接近する際に速度を低下しなければ、機能モジュール29と30の共働作用によって車両を強力に制動し、またはそれ以上に静止状態にもたらす。このことはとりわけ、優先交通権利のある横方向交通が自車2との衝突コースに存在する場合に当てはまる。
【0028】
ここでは実施例を簡単にすることも本発明の枠内である。例えば比較的少数の危険段階を定義することもできる。
【0029】
危険段階に対する応答の種類と数も低減することができる。例えば応答は運転者への警告だけに、または準備手段に、または直接的介入に、またはそれらの任意の組合せに制限することができる。
【0030】
図3と図4に基づいて本発明の第2実施例を説明する。この第2実施例では出会い交通での衝突回避が行われる。
【0031】
図3は、概略的に示された交差点1での交通状況を示す。この交差点ではそれぞれ2車線の道路が相互に交差する。東西方向に経過する道路の右車線では第1の車両2(自車)が交差点1に接近し、南北方向に経過する道路での走行を継続するために対向走路を越えて左折しようとする。東西方向に経過する道路の左車線では第2の車両3および第4の車両4が走行している。車両4は交差点1をすでに去っているが、車両3は車両2に対する出会い交通で交差点1に接近している。車両2には本発明の解決手段が実現されている。車両2にはこのために多数のセンサシステムが装備されている。車両2は、検出領域2aを備える車両固定されたビデオシステム2.1と、検出領域2bを備える車両固定されたレーダシステム2.2を有する。検出領域2a,2bは車両2の走行方向に異なる距離で伸長している。ビデオシステム2.1は近距離領域を検出するためのものであり、レーダシステム2.2はさらに離れた領域を検出するために設けられている。択一的にまたは付加的に赤外線システムまたはライダーシステムを設けることができるが、これらはここには固有の参照符号によって図示されていない。車両2はさらに別のセンサシステム、例えば車輪回転数センサ2.3、ヨーイング速度センサ2.4、並びに操舵角センサ2.5を有し、これらは従来のABSシステムおよびASRシステムからすでに公知である。
【0032】
図4は、右左折運転での衝突回避を説明するためのブロック回路図である。周囲状況センサはビデオシステム2.1とレーザシステム2,2からなり、機能モジュール20と接続されている。この機能モジュール20は前記ステムの出力信号を処理する。機能モジュール20は別の機能モジュール21と接続されており、この機能モジュール21には機能モジュール20の出力信号が供給され、これらの出力信号を車線および交通標識の識別のために評価する。さらに機能モジュール20は機能モジュール22と接続されており、この機能モジュール22には機能モジュール20の出力信号と、別のセンサ、すなわち車輪回転数センサ2,3、ヨーイング速度センサ2.4および操舵角センサ2.5の出力信号が供給される。機能モジュール22は自車2の運動と、運転者意思に識別に用いられる。最後に機能モジュール20は機能モジュール23と接続されており、この機能モジュール23は機能モジュール20の出力信号から対面交通に関しての情報を受け取る。機能モジュール21と22は出力側で別の機能モジュール44と接続されている。この機能モジュール44は注意度Aの検出に用いられる。さらに機能モジュール22は機能モジュール23と共に別の機能モジュール25と接続されており、この機能モジュール25は衝突危険度の検出に用いられる。出力側で機能モジュール26は複数の機能モジュール27,28,29,30と接続されている。ここで機能モジュール27は光学的、音響的、触覚的信号出力に用いられる。機能モジュール28は乗員保護システムを制御する。機能モジュール29は機関制御部を制御する。機能モジュール30は車両2の制動システムに作用する。
【0033】
以下、右左折運転での衝突阻止方法を詳細に説明する。交差点1に接近すると車両2のビデオシステム2.1は交通標識と、場合により存在する信号機の光信号を検出する。付加的に走行路縁部の経過、および相応のマーキングまたは同等の境界が存在する場合には車線の経過も検出される。ビデオ信号2.1の出力信号は機能モジュール20で処理され、機能モジュール21で評価される。ビデオシステム2.1の出力信号を評価することにより、車両2がどの車線でどのように交差点1に接近しており、場合により存在する交通補湯式がどのような交通規則を定めており、信号機がどの信号位置を有しているかが識別される。東西方向に延在する道路に、図3に第2の車両3および第3の車両4により示すように対面交通が存在すれば、これらの車両3,4も検出領域2a,2b内に存在すれば同様に車両2のビデオシステム2.1とレーダシステム2.2により検出される。図3では第2の車両3が検出される。第3の車両4はすでに検出領域2a,2b外にあり、従って車両2の搭載ビデオシステム2.1およびレーダシステム2.2により検出することはできない。しかしこのことはいずれにしろ必要ない。なぜなら、車両4はすでに対向方向で交差点1から離れており、車両2,3が衝突する危険は全くないからである。
【0034】
前記システムの出力信号はモジュール20により処理され、機能モジュール23に8より評価される。この種の車両3が対面交通に存在することだけでなく、付加的にこの車両の運動パラメータ、例えば速度、加速度、並びに場合により並進運動量、回転運動量が検出される。これらの測定データにより車両2は、車両3の将来的走行行動を大きな信頼性を以て予測することができる。さらに別の搭載センサ、例えば車輪回転数センサ2.3、ヨーイング速度センサ2.4、操舵角センサ2.5並びに機能モジュール22によって、自車2の運動状態と運転者の意志が検出される。例えば右左折意思を、運転者により前もって操作された走行方向指示器の位置または検出された走行路経過に対しての予測的車両運動に基づいて識別することができる。
【0035】
センサから出力された出力信号に基づいて、対向車線を越える左への左折意思が識別され、付加的に対面交通で車両3が接近していることが検出されると、機能モジュール25で機能モジュール22と23の出力信号から衝突危険度が導出される。ここではとりわけ2つの車両2と3の間隔、それらの速度および加速度が考慮される。運転者応答、例えば制動または加速、および自車の車線経過についての情報並びに優先道路の経過から、注意度Aが検出される。この注意度は、運転者が変化する状況に応答したか否かを指示する。例えば対向走行路を越える左折過程時に対面交通が現れると、自車2の運転者はこのことにより発生する危険性を識別し、車両2をアクセスペダルからの足の離しおよび/またはブレーキペダルの操作により制動することができる。付加的に運転者はハンドルを切ることもできる。
【0036】
このようにして装置が衝突の危険性を識別しても車両2は危険なしに交差点に進入することができる。このような状況においては注意度が大きい。なぜなら装置の応答要求が運転者の実際の応答による速度の低下および/または回避運転に従い十分にカバーされるからである。ここで装置の応答要求は危険なしで走行可能な、すなわち衝突しない軌跡を指向する。具体的な例では、注意度に対する値は次のことにより検出される。すなわち遅延の目標値を車両の遅延の実際値から減算し、重力加速度に正規化することにより検出される。同じ方法手段は加速度変化にも適用することができる。所定の規則を用いることによって、衝突危険度と注意度から機能モジュール26で自車2に対する危険段階が検出される。例えば衝突危険度Kが第1の値1より大きく、注意度が値2より大きければ、危険段階Aに達する。所定の危険段階には前もって定義された対抗措置が割り当てられ、この対抗措置は機能モジュール27,28,29,30により実行される。危険段階Aが検出されたことへの応答としてこの第2実施例では、対面交通で接近中の車両3との衝突が迫っていることが運転者に警告される。この種の警告は機能モジュール27によって実行される。
【0037】
運転者に優先交通違反およびそれにより惹起される衝突の危険について警告するために、種々の警告知覚チャネルが使用される。運転者は一方では音響的信号、例えば信号音または合成音声により警告される。さらに運転者は光学的信号、例えば警報ランプにより、または危険な交通標識をディスプレイ、とりわけヘッドアップディスプレイに表示することにより警告を受けることができる。さらに運転者には触覚的信号、例えばアクセルペダルまたはステアリングコラムの振動により警告することができる。
【0038】
運転者への警告を別にしても、車両2を早期に切迫する非常状況に対して準備することができる。例えば危険段階Bでは制動過程をブレーキシューの当接(プレフィル)および/またはブレーキアシストの閾値の変更により準備することができる。このことは機能モジュール30が実行する。
【0039】
危険段階Cでは、機能モジュール28によって乗員保護システム、例えばエアバッグおよびシートベルトテンショナのトリガ閾値が、比較的感度が良くなるように変更される。
【0040】
危険段階Dでは機能モジュール27によって機関制御部への介入が行われ、機関の駆動トルクが低減される。
【0041】
危険段階Eでは機能モジュール30を介して制動制御への介入が行われ、まず警告制動がトリガされ、これにより運転者の応答準備性が制動過程に集中される。ポジティブな副作用として車両から運動エネルギーの一部をすでに奪うことができる。
【0042】
危険男系Fでは機能モジュール28のスイッチオンの下で、可逆的乗員保護システム、例えばシートベルトテンショナがトリガされる。
【0043】
最後に危険段階Gでは、車両運動自体に強力に作用する手段が取られる。運転者が衝突の危険が高いにもかかわらず速度を低下しなければ、機能モジュール29と30との共働作用によって車両が強く制動されるか、または静止状態にまでもたらされる。
【0044】
ここでは実施例を簡単にすることも本発明の枠内である。例えば比較的少数の危険段階を定義することもできる。
【0045】
危険段階に対する応答の種類と数も低減することができる。例えば応答は運転者への警告だけに、または準備手段に、または直接的介入に、またはそれらの任意の組合せに制限することができる。
【図面の簡単な説明】
【0046】
【図1】図1は、交差点での交通状況を示す概略図である。
【図2】図2は、交差点交通での衝突回避を説明するための第1のブロック回路図である。
【図3】図3は、右左折運転を伴う交通状況を示す概略図である。
【図4】図4は、右左折運転での衝突回避を説明するための第2のブロック回路図である。
【技術分野】
【0001】
本出願人のDE19736774A1から、自動車における情報指示方法が公知であり、この方法により画像ベースの走行路追跡が可能である。このために車両に固定されたビデオカメラが設けられており、このビデオカメラは車両前方の走行路を交通標識も含めて撮影する。ビデオカメラから送出されたビデオ信号は規則に反する走行状態について評価される。規則に反する走行行動、例えば許容されない速度超過、または追い越し禁止道路区間での追い越し過程が識別されると、警報信号が運転者に対して形成される。
【0002】
DE29802953U1からも、交通標識を識別し、それをディスプレイに表示するための電子システムが公知である。
【0003】
同一出願人によるDE29902457U1からもさらに、ビデオ信号を発生するためのカメラ装置を有する周囲状況識別装置が公知である。この装置は重なり合う視野を備える少なくとも2つのカメラを有している。これらのカメラは立体ビデオシーケンスを画像処理ユニットに送出し、画像処理ユニットは3次元パターン識別と画像処理によって交通標識を検出し、分類する。交通標識の他に、この装置は同時に車両前方を走行する車両ないし前方に存在する車両を識別することができ、交通状況に応じて警報信号を出力し、ないしは車両の動作状態にアクティブに介入する。この種のアクティブ介入として、発進および停止時または渋滞走行時に車両のブレーキおよび機関制御部に介入する車間制御、または自動操舵制御が記載されている。
【0004】
US6049295A1から、交通標識のない交差点または見通しの悪い道路区間を走行する車両間での衝突を阻止する方法が公知である。この方法は道路固定された装置と車両に接続された装置を必要とし、これらの装置は無線を介して相互に接続される。
【0005】
DE19830547A1からさらに交差点警報システムが公知である。このシステムも同様に道路側と車両側の装置に基づくものである。
【0006】
発明の利点
本発明は、本出願人により公知のシステムをさらに発展させたものであり、右左折運転時の優先交通違反および運転者エラーによる事故を回避するのを支援するものである。本発明は、交通標識および信号機を車両自律的に識別し、他車とその運動パラメータを車両自律的に識別し、並びに自車の運動パラメータを考慮することによって、優先交通違反の程度および衝突危険度の程度、ないしは注目度と衝突危険度を検出することができ、これらかさらに危険段階を導出することができるという知識から出発するものである。導出された危険段階に依存して有利には切迫する衝突を回避するための対抗措置を取ることができる。
【0007】
例えば危険度が比較的小さい場合には、運転者に対し光学的および/または音響的信号によって危険状況について注意を喚起することができる。
【0008】
別の拡大段階では、ブレーキシューをブレーキディスクおよびブレーキドラムに当接することにより(プレフィル)、および場合によりブレーキアシストの閾値をその有利な使用に適合することにより車両の制動装置を準備することができる。
【0009】
さらに運転者の注意を触覚信号の出力により、例えば警報制動および/または機関のスロットリングによりさらに高めることができる。
【0010】
操舵および/または制動を介しても車両運動を調整することができる。
【0011】
さらに非可逆的な乗員保護システム、例えばシートベルトテンショナおよびエアバッグを、変更可能な閾値の適合によってその有利な使用について準備することができる。
【0012】
さらに非可逆的乗員保護システムを乗員保護のためにトリガすることができる。
【0013】
図面
本発明の方法および装置を図面に示された実施例に基づき説明する。
図1は、交差点での交通状況を示す概略図である。
図2は、交差点交通での衝突回避を説明するための第1のブロック回路図である。
図3は、右左折運転を伴う交通状況を示す概略図である。
図4は、右左折運転での衝突回避を説明するための第2のブロック回路図である。
【0014】
実施例の説明
本発明の第1実施例を図1と図2に基づいて説明する。ここでは交差点領域での衝突を回避できる。図1は概略的に示された交差点1での交通状況を示す。この交差点1ではそれぞれ2車線の道路が相互に交差する。東西方向に延在する道路では第1の車両2(自車)が交差点1に接近する。南北方向に延在する道路では第2の車両3並びに第3の車両4が対向して交差点に接近する。車両2では本発明の解決手段が実現されている。車両2にはこのために多数のセンサシステムが装備されている。例えば車両2は少なくとも1つの車両固定されたビデオシステム2.1を有し、このビデオシステムは検出領域2aを備えている。さらに検出領域2bを備える車両固定されたレーダシステム2.2を設けることができる。ここで検出領域2a,2bは異なる距離で車両2の走行方向に伸長している。ビデオシステム2.1は近距離領域を検出するためのものであり、レーダシステム2.1はさらに離れた距離領域を検出するために設けられている。択一的にまたは付加的に赤外線システムおよびライダーシステムを設けることができるが、これらはここには固有の参照符号により示されていない。車両2はさらに別のセンサシステム、例えば車輪回転数センサ2.3、ヨーイング速度センサ2.4、並びに操舵角センサ2.5を備えており、これらはすでに従来のABSシステムおよびASRシステムから公知である。
【0015】
図2は交差点交通での衝突回避を説明するためのブロック回路図である。周囲状況センサ系はビデオシステム2.1とレーダシステム2.2からなり、機能モジュール20と接続されている。この機能モジュールはこれら公知のシステムの出力信号を処理する。機能モジュール20は別の機能モジュール21と接続されており、この別の機能モジュール21には機能モジュール20の出力信号が供給され、この出力信号が走行路および交通標識の識別のために評価される。
【0016】
さらに機能モジュール20は機能モジュール22と接続されており、この機能モジュール22には一方で機能モジュール20の出力信号が、他方で別のセンサ、すなわちヨーイング速度センサ2.4および操舵角センサ2.5の出力信号が供給される。機能モジュール2は自車2の運動識別および運転者意思の識別に用いられる。さらに機能モジュール20は機能モジュール23と接続されており、この機能モジュール23は機能モジュール20の出力信号から横方向交通についての情報を獲得する。機能モジュール21と22は出力側で別の機能モジュール24と接続されており、この別の機能モジュール24は優先交通誤判断度の検出に用いられる。さらに機能モジュール22は機能モジュール23と共に別の機能モジュール25と接続されている。この機能モジュール25は衝突危険度の検出に用いられる。機能モジュール24と25はさらに機能モジュール26と接続されており、この機能モジュール26は危険段階の検出に用いられる。機能モジュール26の出力側は複数の機能モジュール27,28,29,30と接続されている。ここで機能モジュール27は光学的、音響的、触覚的シグナリングに用いられる。機能モジュール28は乗員保護システムを制御し、機能モジュール29は機関制御部に影響を与える。最後に機能モジュール30はブレーキシステムに作用する。
【0017】
以下、交差点領域における衝突阻止のための方法を詳細に説明する。交差点1に接近すると車両2のビデオシステム2.1は交通標識、および信号機が存在する場合にはその光信号を検出する。付加的に走行路縁部の経過、および相応のマーキングまたは同等の境界が存在する場合には車線の経過も検出する。ビデオシステム2.1の出力信号は機能モジュール20で処理され、機能モジュール21で評価される。ビデオシステム2.1の出力信号の評価により、車両2がどの車線でどのように交差点1に接近しているかが識別される。さらにどのような交通規則を場合により存在する交通標識が規定し、信号機がどの信号位置を有しているかが識別される。図1に第2の車両3および第3の車両4により示されるように南北方向に横方向交通が存在すれば、この車両3,4も同様にビデオシステム2.1および場合により付加的に設けられたレーダシステム2.2により検出される。前記システムの出力信号は機能モジュール20により処理され、機能モジュール23により評価される。横方向交通にあるこの種の車両3,4の評価の他に付加的に来られた車両の運動パラメータ、例えば速度、加速度並びに場合により並進運動量と回転運動量を検出する。これらの測定データにより車両2は、車両3,4の将来的走行行動を大きな信頼性を以て予測することができる。さらに別の車両固有のセンサ、例えば車輪回転数センサ2.3、ヨーイング速度センサ2.4、操舵角センサ2.5、並びに機能モジュール22によって自車2の運動状態と運転者意思が求められる。
【0018】
例えば右左折意思を、運転者により以前に操作された走行方向指示器の位置または車線経過に関連する予測的車両運動に基づいて識別することができる。このことは、交通信号機により交通整理される交差点ではしばしば複数の走行方向が1つの車線を分け合い、この異なる方向に対して信号が異なることもあり得るので有利である。例えば信号機が右折車に対して緑であり、他の走行方向に対しては赤を指示することがある。機能モジュール21は機能モジュール20の出力信号から、交差点1に接近する自車2が優先交通権を有するか否かを検出する。ここで例えば、自車2が優先交通権を有していないことが判明すれば、機能モジュール24で機能モジュール21と22の出力信号から優先交通違反度が検出される。この優先交通違反度は自車2の運動データ、例えば接近速度と加速度、並びに交差点1までの車両2の距離から検出される。ここでは付加的に運転者の反応、例えばステアリングの切れ角、アクセルペダルまたはブレーキペダルの操作等が考慮される。さらに横方向交通の存在(車両3,4)が交差点1の領域で識別されると(機能モジュール23)、自車2と他車3,4の運動データ、すなわち機能モジュール22,23の出力信号から、機能モジュール25で衝突危険度が検出される。この衝突危険度は実際には、自車2と他車3,4とが衝突する確率に対する尺度である。
【0019】
ここで各計算時点では自車2と他車3,4との間隔および運動量が測定値から検出される。これらのデータによって関与する車両2,3,4の運動軌道が予測される。ここではとりわけ、車両2,3,4が異なる運動自由度を有することができることを考慮する。すなわちこれらの車両は縦方向および/または横方向に加速することがある。前提とされる快適限界の枠内で、すなわち車両常客に対して許容可能な限界値の枠内で、縦方向では2.5ms−2までの加速度値が、横方向では5ms−2までの加速度値が前提とされる。このことにより関与する車両が将来の時点で存在し得る領域の大きさが予測時間と共に増加する。
【0020】
衝突危険度の計算に対して特に有利な方法は、関与する車両の将来的存在領域の重なり合い率を比較する。衝突危険度の検出に対する別の有利な方法では、他車3,4の存在領域に入り込む自車2の可能な運動軌道を除去する。この衝突危険度によって、残っている軌道の数と、付加的に各潜在的走行操縦に対してもたらすべき加速度が評価される。この加速度が大きければ危険性も高く、従って衝突危険度も高くなる。すでに上に述べたように、優先交通違反度も同等の視点から検出される。しかしここで考察すべき状況はより単純である。なぜなら交通標識および/または信号機は位置固定された対象物だからであり、その空間的広がりはせいぜいのところ停止線を含むだけだからである。
【0021】
所定の制御機構を用いて、衝突危険度と優先交通違反度から機能モジュール26で自車2に対する危険段階が検出される。検出された危険段階は対抗措置に配属される。この対抗措置は機能モジュール27,28,29,30により実行される。例えば優先交通違反度が所定値1よりも大きな値2に達するとする。同時に衝突危険度が所定値3よりも大きな値に達するとする。優先交通違反度と衝突危険度とのこの組合せは危険段階Aに分類される。危険段階Aを検出したことに対する応答として、本発明の実施例では運転者に対し衝突が切迫していることが警告される。この種の警告は機能モジュール27により発せられる。運転者に優先交通違反と、このことにより惹起される衝突の危険を警告するためにここでは種々の知覚チャネルが使用される。運転者は一方では音響的信号、例えば信号音または人工音声により警告される。さらに運転者は、光学的信号例えば警報ランプにより、または人工的交通標識をディスプレイ、とりわけヘッドアップディスプレイに指示することにより警告を受け取ることができる。さらに運転者には触覚的信号、例えばアクセルペダルまたはステアリングコラムの振動により警告を与えることができる。
【0022】
運転者への警告を別にしても、車両2を切迫する非常事態に対して早期に準備することができる。例えば危険段階Bでは制動過程を、ブレーキシューの当接(プレフィル)および/またはブレーキアシストの閾値の変更によって準備することができる。これに対しては機能モジュール30が担当する。
【0023】
危険段階Cでは、機能モジュール28により乗員保護システム、例えばエアバッグおよびシートベルトテンショナのトリガ閾値が、感度が比較的に高くなるように変更される。
【0024】
危険段階Dでは、機能モジュール27によって機関制御部への介入が行われ、機関の駆動トルクが低減される。
【0025】
危険段階Eでは、機能モジュール30を介してブレーキ制御部への介入が行われ、まず警告制動がトリガされ、これにより運転者の反応準備性を制動過程に集中させる。ポジティブな副作用として、この際に車両の運動エネルギーの一部をすでに奪うことができる。
【0026】
危険段階Fでは、機能モジュール28のスイッチオンの下で可逆的乗員保護システム、例えばシートベルトテンショナがトリガされる。
【0027】
最後に危険段階Gでは、車両運動自体を強力に制御する。運転者が例えば一時停止標識に接近する際、または赤信号に接近する際に速度を低下しなければ、機能モジュール29と30の共働作用によって車両を強力に制動し、またはそれ以上に静止状態にもたらす。このことはとりわけ、優先交通権利のある横方向交通が自車2との衝突コースに存在する場合に当てはまる。
【0028】
ここでは実施例を簡単にすることも本発明の枠内である。例えば比較的少数の危険段階を定義することもできる。
【0029】
危険段階に対する応答の種類と数も低減することができる。例えば応答は運転者への警告だけに、または準備手段に、または直接的介入に、またはそれらの任意の組合せに制限することができる。
【0030】
図3と図4に基づいて本発明の第2実施例を説明する。この第2実施例では出会い交通での衝突回避が行われる。
【0031】
図3は、概略的に示された交差点1での交通状況を示す。この交差点ではそれぞれ2車線の道路が相互に交差する。東西方向に経過する道路の右車線では第1の車両2(自車)が交差点1に接近し、南北方向に経過する道路での走行を継続するために対向走路を越えて左折しようとする。東西方向に経過する道路の左車線では第2の車両3および第4の車両4が走行している。車両4は交差点1をすでに去っているが、車両3は車両2に対する出会い交通で交差点1に接近している。車両2には本発明の解決手段が実現されている。車両2にはこのために多数のセンサシステムが装備されている。車両2は、検出領域2aを備える車両固定されたビデオシステム2.1と、検出領域2bを備える車両固定されたレーダシステム2.2を有する。検出領域2a,2bは車両2の走行方向に異なる距離で伸長している。ビデオシステム2.1は近距離領域を検出するためのものであり、レーダシステム2.2はさらに離れた領域を検出するために設けられている。択一的にまたは付加的に赤外線システムまたはライダーシステムを設けることができるが、これらはここには固有の参照符号によって図示されていない。車両2はさらに別のセンサシステム、例えば車輪回転数センサ2.3、ヨーイング速度センサ2.4、並びに操舵角センサ2.5を有し、これらは従来のABSシステムおよびASRシステムからすでに公知である。
【0032】
図4は、右左折運転での衝突回避を説明するためのブロック回路図である。周囲状況センサはビデオシステム2.1とレーザシステム2,2からなり、機能モジュール20と接続されている。この機能モジュール20は前記ステムの出力信号を処理する。機能モジュール20は別の機能モジュール21と接続されており、この機能モジュール21には機能モジュール20の出力信号が供給され、これらの出力信号を車線および交通標識の識別のために評価する。さらに機能モジュール20は機能モジュール22と接続されており、この機能モジュール22には機能モジュール20の出力信号と、別のセンサ、すなわち車輪回転数センサ2,3、ヨーイング速度センサ2.4および操舵角センサ2.5の出力信号が供給される。機能モジュール22は自車2の運動と、運転者意思に識別に用いられる。最後に機能モジュール20は機能モジュール23と接続されており、この機能モジュール23は機能モジュール20の出力信号から対面交通に関しての情報を受け取る。機能モジュール21と22は出力側で別の機能モジュール44と接続されている。この機能モジュール44は注意度Aの検出に用いられる。さらに機能モジュール22は機能モジュール23と共に別の機能モジュール25と接続されており、この機能モジュール25は衝突危険度の検出に用いられる。出力側で機能モジュール26は複数の機能モジュール27,28,29,30と接続されている。ここで機能モジュール27は光学的、音響的、触覚的信号出力に用いられる。機能モジュール28は乗員保護システムを制御する。機能モジュール29は機関制御部を制御する。機能モジュール30は車両2の制動システムに作用する。
【0033】
以下、右左折運転での衝突阻止方法を詳細に説明する。交差点1に接近すると車両2のビデオシステム2.1は交通標識と、場合により存在する信号機の光信号を検出する。付加的に走行路縁部の経過、および相応のマーキングまたは同等の境界が存在する場合には車線の経過も検出される。ビデオ信号2.1の出力信号は機能モジュール20で処理され、機能モジュール21で評価される。ビデオシステム2.1の出力信号を評価することにより、車両2がどの車線でどのように交差点1に接近しており、場合により存在する交通補湯式がどのような交通規則を定めており、信号機がどの信号位置を有しているかが識別される。東西方向に延在する道路に、図3に第2の車両3および第3の車両4により示すように対面交通が存在すれば、これらの車両3,4も検出領域2a,2b内に存在すれば同様に車両2のビデオシステム2.1とレーダシステム2.2により検出される。図3では第2の車両3が検出される。第3の車両4はすでに検出領域2a,2b外にあり、従って車両2の搭載ビデオシステム2.1およびレーダシステム2.2により検出することはできない。しかしこのことはいずれにしろ必要ない。なぜなら、車両4はすでに対向方向で交差点1から離れており、車両2,3が衝突する危険は全くないからである。
【0034】
前記システムの出力信号はモジュール20により処理され、機能モジュール23に8より評価される。この種の車両3が対面交通に存在することだけでなく、付加的にこの車両の運動パラメータ、例えば速度、加速度、並びに場合により並進運動量、回転運動量が検出される。これらの測定データにより車両2は、車両3の将来的走行行動を大きな信頼性を以て予測することができる。さらに別の搭載センサ、例えば車輪回転数センサ2.3、ヨーイング速度センサ2.4、操舵角センサ2.5並びに機能モジュール22によって、自車2の運動状態と運転者の意志が検出される。例えば右左折意思を、運転者により前もって操作された走行方向指示器の位置または検出された走行路経過に対しての予測的車両運動に基づいて識別することができる。
【0035】
センサから出力された出力信号に基づいて、対向車線を越える左への左折意思が識別され、付加的に対面交通で車両3が接近していることが検出されると、機能モジュール25で機能モジュール22と23の出力信号から衝突危険度が導出される。ここではとりわけ2つの車両2と3の間隔、それらの速度および加速度が考慮される。運転者応答、例えば制動または加速、および自車の車線経過についての情報並びに優先道路の経過から、注意度Aが検出される。この注意度は、運転者が変化する状況に応答したか否かを指示する。例えば対向走行路を越える左折過程時に対面交通が現れると、自車2の運転者はこのことにより発生する危険性を識別し、車両2をアクセスペダルからの足の離しおよび/またはブレーキペダルの操作により制動することができる。付加的に運転者はハンドルを切ることもできる。
【0036】
このようにして装置が衝突の危険性を識別しても車両2は危険なしに交差点に進入することができる。このような状況においては注意度が大きい。なぜなら装置の応答要求が運転者の実際の応答による速度の低下および/または回避運転に従い十分にカバーされるからである。ここで装置の応答要求は危険なしで走行可能な、すなわち衝突しない軌跡を指向する。具体的な例では、注意度に対する値は次のことにより検出される。すなわち遅延の目標値を車両の遅延の実際値から減算し、重力加速度に正規化することにより検出される。同じ方法手段は加速度変化にも適用することができる。所定の規則を用いることによって、衝突危険度と注意度から機能モジュール26で自車2に対する危険段階が検出される。例えば衝突危険度Kが第1の値1より大きく、注意度が値2より大きければ、危険段階Aに達する。所定の危険段階には前もって定義された対抗措置が割り当てられ、この対抗措置は機能モジュール27,28,29,30により実行される。危険段階Aが検出されたことへの応答としてこの第2実施例では、対面交通で接近中の車両3との衝突が迫っていることが運転者に警告される。この種の警告は機能モジュール27によって実行される。
【0037】
運転者に優先交通違反およびそれにより惹起される衝突の危険について警告するために、種々の警告知覚チャネルが使用される。運転者は一方では音響的信号、例えば信号音または合成音声により警告される。さらに運転者は光学的信号、例えば警報ランプにより、または危険な交通標識をディスプレイ、とりわけヘッドアップディスプレイに表示することにより警告を受けることができる。さらに運転者には触覚的信号、例えばアクセルペダルまたはステアリングコラムの振動により警告することができる。
【0038】
運転者への警告を別にしても、車両2を早期に切迫する非常状況に対して準備することができる。例えば危険段階Bでは制動過程をブレーキシューの当接(プレフィル)および/またはブレーキアシストの閾値の変更により準備することができる。このことは機能モジュール30が実行する。
【0039】
危険段階Cでは、機能モジュール28によって乗員保護システム、例えばエアバッグおよびシートベルトテンショナのトリガ閾値が、比較的感度が良くなるように変更される。
【0040】
危険段階Dでは機能モジュール27によって機関制御部への介入が行われ、機関の駆動トルクが低減される。
【0041】
危険段階Eでは機能モジュール30を介して制動制御への介入が行われ、まず警告制動がトリガされ、これにより運転者の応答準備性が制動過程に集中される。ポジティブな副作用として車両から運動エネルギーの一部をすでに奪うことができる。
【0042】
危険男系Fでは機能モジュール28のスイッチオンの下で、可逆的乗員保護システム、例えばシートベルトテンショナがトリガされる。
【0043】
最後に危険段階Gでは、車両運動自体に強力に作用する手段が取られる。運転者が衝突の危険が高いにもかかわらず速度を低下しなければ、機能モジュール29と30との共働作用によって車両が強く制動されるか、または静止状態にまでもたらされる。
【0044】
ここでは実施例を簡単にすることも本発明の枠内である。例えば比較的少数の危険段階を定義することもできる。
【0045】
危険段階に対する応答の種類と数も低減することができる。例えば応答は運転者への警告だけに、または準備手段に、または直接的介入に、またはそれらの任意の組合せに制限することができる。
【図面の簡単な説明】
【0046】
【図1】図1は、交差点での交通状況を示す概略図である。
【図2】図2は、交差点交通での衝突回避を説明するための第1のブロック回路図である。
【図3】図3は、右左折運転を伴う交通状況を示す概略図である。
【図4】図4は、右左折運転での衝突回避を説明するための第2のブロック回路図である。
【特許請求の範囲】
【請求項1】
車両の衝突を阻止するための方法であって、
一方では車両の周囲、他方では車両の運動量をセンサによって検出する方法において、
センサ(2.1,2.2,2.3,2.4,2.5)の出力信号から優先交通違反度(V)および衝突危険度(K)を導出し、
優先交通違反度と衝突危険度との組合せから危険段階(A,B,C,D,E,F,G)を検出し、
それぞれ検出された危険段階(A,B,C,D,E,F,G)に依存して衝突危険性を低減するために所定のステップを開始する、
ことを特徴とする方法。
【請求項2】
請求項1記載の方法において、優先交通違反度(V)と衝突危険度(K)を危険性に依存して等級付け、優先交通違反度(V)と衝突危険度(K)との組合せで危険段階(A,B,C,D,E,F,G)の危険性に依存する等級付けが行われるようにする。
【請求項3】
請求項1または2記載の方法において、衝突危険性を低減するために前もって設定可能なステップを危険性に依存して等級付ける。
【請求項4】
請求項1から3までのいずれか1項記載の方法において、衝突危険性を低減するためのステップは、運転者への警告、車両システムを目前に迫る使用に対して準備すること、操舵システム、制動システムおよび機関制御システムへのアクティブな介入、並びに乗員保護システムのアクティベートを含む。
【請求項5】
請求項1から4までのいずれか1項記載の方法において、運転者への警告は光学的、音響的および触覚的信号によって行う。
【請求項6】
請求項5項記載の方法において、触覚的信号は車両(2)のアクセルペダルおよび/またはステアリングコラムの振動を含む。
【請求項7】
請求項1から6までのいずれか1項記載の方法において、車両(2)の周囲状況および車両(2)の運動量を搭載センサ(2.1,2.2,2.3,2.4,2.5)によって検出する。
【請求項8】
請求項1から7までのいずれか1項記載の方法において、車両(2)の周囲状況を少なくとも1つのビデオシステム(2.1)によって検出する。
【請求項9】
請求項1から8までのいずれか1項記載の方法において、車両(2)の周囲状況を付加的に少なくとも1つのレーダシステム(2.2)によって検出する。
【請求項10】
請求項1から9までのいずれか1項記載の方法において、車両(2)の運動量を複数のセンサにより、とりわけ車輪回転数センサ(2.3)、ヨーイング速度センサ(2,4)および操舵角センサ(2.5)により検出する。
【請求項11】
請求項1から9までのいずれか1項記載の方法において、
優先交通違反度(V)を、少なくとも1つのビデオシステム(2.1)によって検出された周囲状況、例えば車線経過、交通標識、信号機状況、および自車(2)の運動量、例えば走行速度、車両加速度、並びに検出された運転者意思から検出する。
【請求項12】
請求項1から11までのいずれか1項記載の方法において、
衝突危険度(K)を、搭載ビデオシステム(2.1)および/またはレーダシステム(2.2)によって獲得された、横方向交通を形成する他車(3,4)の運動量、並びに別のセンサシステム、例えば車輪回転数センサ(2.3)、ヨーイング速度センサ(2.4)、操舵角センサ(2.5)から獲得された自車(2)の運動量から検出する。
【請求項13】
対面交通および右左折交通時に車両の衝突を阻止するための方法であって、
一方では車両の周囲状況を、他方では車両の運動量をセンサによって検出する形式の方法において、
センサ(2.1,2.2,2.3,2.4,2.5)の出力信号から注意度(A)および衝突危険度(K)を導出し、
注意度(A)と衝突危険度(K)との組合せから危険段階(A,B,C,D,E,F,G)を検出し、
それぞれ検出された危険段階(A,B,C,D,E,F,G)に依存して衝突危険性を低減するための所定のステップを開始する、
ことを特徴とする方法。
【請求項14】
請求項13記載の方法において、注意度(A)と衝突危険度(K)を危険性に依存して等級付け、注意度(A)と衝突危険度(K)の組合せで危険性に依存する危険段階(A,B,C,D,E,F,G)を形成する。
【請求項15】
請求項13または14記載の方法において、衝突危険性を低減するための所定のステップを危険性に依存して等級付ける。
【請求項16】
請求項13から15までのいずれか1項記載の方法において、
衝突危険性を低減するためのステップは、運転者への警告、目前に迫った使用への車両システムの準備、操舵システム、制動システムおよび機関制御システムへのアクティブな介入、並びに乗員保護システムのアクティベートを含む。
【請求項17】
請求項13から16までのいずれか1項記載の方法において、運転者への警告を光学的、音響的および/または触覚的信号により行う。
【請求項18】
請求項17記載の方法において、触覚的信号は、車両のアクセルペダルおよび/またはステアリングコラムの振動を含む。
【請求項19】
請求項13から18までのいずれか1項記載の方法において、車両(2)の周囲状況および車両(2)の運動量を搭載センサ(2.1,2.2,2.3,2.4,2.5)によって検出する。
【請求項20】
請求項13から19までのいずれか1項記載の方法において、車両(2)の周囲状況を少なくとも1つのビデオシステム(2.1)によって検出する。
【請求項21】
請求項13から20までのいずれか1項記載の方法において、車両(2)の周囲状況を少なくとも1つのレーダシステム(2.2)によって検出する。
【請求項22】
請求項13から21までのいずれか1項記載の方法において、車両(2)の運動量を複数のセンサ、とりわけ車輪回転数センサ(2,3)、ヨーイング速度センサ(2.4)、および操舵角センサ(2.5)によって検出する。
【請求項23】
請求項13から22までのいずれか1項記載の方法において、
注意度(A)を、少なくとも1つの搭載ビデオシステム(2.1)によって検出された周囲状況データ、例えば車線経過、交通標識、自車(2)の運動量、例えば走行速度、車両加速度、並びに運転者の応答、例えばアクセルペダルまたはブレーキペダルの操作から検出する。
【請求項24】
請求項13から23までのいずれか1項記載の方法において、
衝突危険度(K)を、搭載ビデオシステム(2.1)および/またはレーダシステム(2,3)によって獲得された、対面交通を形成する他車(3,4)の運動量、並びにさらなるセンサ、例えば車輪回転数センサ(2.3)、ヨーイング速度センサ(2.4)、操舵角センサ(2.5)により獲得された自車(2)の運動量から導出する。
【請求項25】
請求項1から24までのいずれか1項記載の方法を実施するための装置において、
該装置は、周囲状況を検出するためのセンサ、例えば少なくとも1つのビデオシステム(2.1)および場合により付加的に、少なくとも1つのレーダシステム(2.2)またはライダーシステム、並びに車両(2)の運動量を検出するための複数のセンサ、例えば車輪回転数センサ(2.3)、ヨーイング速度センサ(2.4)、操舵角センサ(2.5)を含み、
該装置はさらに、センサ(2.1,2.2)の出力信号を処理するための機能モジュール(20)、並びにセンサ(2.3,2.4,2.5)の出力信号を処理するための機能モジュール(22)を含み、
該装置はさらに、優先交通違反度(V)を機能モジュール(21,22)の出力信号から検出するための機能モジュール(24)と、衝突危険度(K)を機能モジュール(22,23)の出力信号から検出するための機能モジュール(25)を含み、
該装置はさらに、機能モジュール(24,25)の出力信号を処理するための機能モジュール(26)を含み、
優先交通違反度(V)と衝突危険度(K)の組合せから危険段階(A,B,C,D,E,F,G)が検出され、
該装置はさらに機能モジュール(27,28,29,30)を含み、当該機能モジュール(27,28,29,30)は機能モジュール(26)の出力信号により制御可能であり、
当該機能モジュール(27,28,29,30)は危険段階(A,B,C,D,E,F,G)の形式に依存して、光学的、音響的および触覚的信号装置、乗員保護システム、および車両(2)の機関制御部、制動装置および操舵装置を制御するための制御信号を送出する。
【請求項26】
請求項1から24までのいずれか1項記載の方法を実施するための装置において、
該装置は、周囲状況を検出するためのセンサ、例えば少なくとも1つのビデオシステム(2.1)および場合により付加的に、少なくとも1つのレーダシステム(2.2)またはライダーシステム、並びに車両(2)の運動量を検出するための複数のセンサ、例えば車輪回転数センサ(2.3)、ヨーイング速度センサ(2.4)、操舵角センサ(2.5)を含み、
該装置はさらに、センサ(2.1,2.2)の出力信号を処理するための機能モジュール(20)、並びにセンサ(2.3,2.4,2.5)の出力信号を処理するための機能モジュール(22)を含み、
該装置はさらに、注意度(A)を機能モジュール(21,22)の出力信号から検出するための機能モジュール(44)と、衝突危険度(K)を機能モジュール(22,23)の出力信号から検出するための機能モジュール(25)を含み、
該装置はさらに、機能モジュール(24,25)の出力信号を処理するための機能モジュール(26)を含み、
注意度(A)と衝突危険度(K)の組合せから危険段階(A,B,C,D,E,F,G)が検出され、
該装置はさらに機能モジュール(27,28,29,30)を含み、当該機能モジュール(27,28,29,30)は機能モジュール(26)の出力信号により制御可能であり、
当該機能モジュール(27,28,29,30)は危険段階(A,B,C,D,E,F,G)の形式に依存して、光学的、音響的および触覚的信号装置、乗員保護システム、および車両(2)の機関制御部、制動装置および操舵装置を制御するための制御信号を送出する。
【請求項27】
請求項25または26記載の装置において、
ビデオシステム(2.1)レーダシステム(2.2)、並びにさらなるセンサ(2.3,2.4,2.5)は車両(2)に固定して配置されており、車両(2)は自分の運動量と測定データを自車の周囲状況から自律的に検出することができる。
【請求項1】
車両の衝突を阻止するための方法であって、
一方では車両の周囲、他方では車両の運動量をセンサによって検出する方法において、
センサ(2.1,2.2,2.3,2.4,2.5)の出力信号から優先交通違反度(V)および衝突危険度(K)を導出し、
優先交通違反度と衝突危険度との組合せから危険段階(A,B,C,D,E,F,G)を検出し、
それぞれ検出された危険段階(A,B,C,D,E,F,G)に依存して衝突危険性を低減するために所定のステップを開始する、
ことを特徴とする方法。
【請求項2】
請求項1記載の方法において、優先交通違反度(V)と衝突危険度(K)を危険性に依存して等級付け、優先交通違反度(V)と衝突危険度(K)との組合せで危険段階(A,B,C,D,E,F,G)の危険性に依存する等級付けが行われるようにする。
【請求項3】
請求項1または2記載の方法において、衝突危険性を低減するために前もって設定可能なステップを危険性に依存して等級付ける。
【請求項4】
請求項1から3までのいずれか1項記載の方法において、衝突危険性を低減するためのステップは、運転者への警告、車両システムを目前に迫る使用に対して準備すること、操舵システム、制動システムおよび機関制御システムへのアクティブな介入、並びに乗員保護システムのアクティベートを含む。
【請求項5】
請求項1から4までのいずれか1項記載の方法において、運転者への警告は光学的、音響的および触覚的信号によって行う。
【請求項6】
請求項5項記載の方法において、触覚的信号は車両(2)のアクセルペダルおよび/またはステアリングコラムの振動を含む。
【請求項7】
請求項1から6までのいずれか1項記載の方法において、車両(2)の周囲状況および車両(2)の運動量を搭載センサ(2.1,2.2,2.3,2.4,2.5)によって検出する。
【請求項8】
請求項1から7までのいずれか1項記載の方法において、車両(2)の周囲状況を少なくとも1つのビデオシステム(2.1)によって検出する。
【請求項9】
請求項1から8までのいずれか1項記載の方法において、車両(2)の周囲状況を付加的に少なくとも1つのレーダシステム(2.2)によって検出する。
【請求項10】
請求項1から9までのいずれか1項記載の方法において、車両(2)の運動量を複数のセンサにより、とりわけ車輪回転数センサ(2.3)、ヨーイング速度センサ(2,4)および操舵角センサ(2.5)により検出する。
【請求項11】
請求項1から9までのいずれか1項記載の方法において、
優先交通違反度(V)を、少なくとも1つのビデオシステム(2.1)によって検出された周囲状況、例えば車線経過、交通標識、信号機状況、および自車(2)の運動量、例えば走行速度、車両加速度、並びに検出された運転者意思から検出する。
【請求項12】
請求項1から11までのいずれか1項記載の方法において、
衝突危険度(K)を、搭載ビデオシステム(2.1)および/またはレーダシステム(2.2)によって獲得された、横方向交通を形成する他車(3,4)の運動量、並びに別のセンサシステム、例えば車輪回転数センサ(2.3)、ヨーイング速度センサ(2.4)、操舵角センサ(2.5)から獲得された自車(2)の運動量から検出する。
【請求項13】
対面交通および右左折交通時に車両の衝突を阻止するための方法であって、
一方では車両の周囲状況を、他方では車両の運動量をセンサによって検出する形式の方法において、
センサ(2.1,2.2,2.3,2.4,2.5)の出力信号から注意度(A)および衝突危険度(K)を導出し、
注意度(A)と衝突危険度(K)との組合せから危険段階(A,B,C,D,E,F,G)を検出し、
それぞれ検出された危険段階(A,B,C,D,E,F,G)に依存して衝突危険性を低減するための所定のステップを開始する、
ことを特徴とする方法。
【請求項14】
請求項13記載の方法において、注意度(A)と衝突危険度(K)を危険性に依存して等級付け、注意度(A)と衝突危険度(K)の組合せで危険性に依存する危険段階(A,B,C,D,E,F,G)を形成する。
【請求項15】
請求項13または14記載の方法において、衝突危険性を低減するための所定のステップを危険性に依存して等級付ける。
【請求項16】
請求項13から15までのいずれか1項記載の方法において、
衝突危険性を低減するためのステップは、運転者への警告、目前に迫った使用への車両システムの準備、操舵システム、制動システムおよび機関制御システムへのアクティブな介入、並びに乗員保護システムのアクティベートを含む。
【請求項17】
請求項13から16までのいずれか1項記載の方法において、運転者への警告を光学的、音響的および/または触覚的信号により行う。
【請求項18】
請求項17記載の方法において、触覚的信号は、車両のアクセルペダルおよび/またはステアリングコラムの振動を含む。
【請求項19】
請求項13から18までのいずれか1項記載の方法において、車両(2)の周囲状況および車両(2)の運動量を搭載センサ(2.1,2.2,2.3,2.4,2.5)によって検出する。
【請求項20】
請求項13から19までのいずれか1項記載の方法において、車両(2)の周囲状況を少なくとも1つのビデオシステム(2.1)によって検出する。
【請求項21】
請求項13から20までのいずれか1項記載の方法において、車両(2)の周囲状況を少なくとも1つのレーダシステム(2.2)によって検出する。
【請求項22】
請求項13から21までのいずれか1項記載の方法において、車両(2)の運動量を複数のセンサ、とりわけ車輪回転数センサ(2,3)、ヨーイング速度センサ(2.4)、および操舵角センサ(2.5)によって検出する。
【請求項23】
請求項13から22までのいずれか1項記載の方法において、
注意度(A)を、少なくとも1つの搭載ビデオシステム(2.1)によって検出された周囲状況データ、例えば車線経過、交通標識、自車(2)の運動量、例えば走行速度、車両加速度、並びに運転者の応答、例えばアクセルペダルまたはブレーキペダルの操作から検出する。
【請求項24】
請求項13から23までのいずれか1項記載の方法において、
衝突危険度(K)を、搭載ビデオシステム(2.1)および/またはレーダシステム(2,3)によって獲得された、対面交通を形成する他車(3,4)の運動量、並びにさらなるセンサ、例えば車輪回転数センサ(2.3)、ヨーイング速度センサ(2.4)、操舵角センサ(2.5)により獲得された自車(2)の運動量から導出する。
【請求項25】
請求項1から24までのいずれか1項記載の方法を実施するための装置において、
該装置は、周囲状況を検出するためのセンサ、例えば少なくとも1つのビデオシステム(2.1)および場合により付加的に、少なくとも1つのレーダシステム(2.2)またはライダーシステム、並びに車両(2)の運動量を検出するための複数のセンサ、例えば車輪回転数センサ(2.3)、ヨーイング速度センサ(2.4)、操舵角センサ(2.5)を含み、
該装置はさらに、センサ(2.1,2.2)の出力信号を処理するための機能モジュール(20)、並びにセンサ(2.3,2.4,2.5)の出力信号を処理するための機能モジュール(22)を含み、
該装置はさらに、優先交通違反度(V)を機能モジュール(21,22)の出力信号から検出するための機能モジュール(24)と、衝突危険度(K)を機能モジュール(22,23)の出力信号から検出するための機能モジュール(25)を含み、
該装置はさらに、機能モジュール(24,25)の出力信号を処理するための機能モジュール(26)を含み、
優先交通違反度(V)と衝突危険度(K)の組合せから危険段階(A,B,C,D,E,F,G)が検出され、
該装置はさらに機能モジュール(27,28,29,30)を含み、当該機能モジュール(27,28,29,30)は機能モジュール(26)の出力信号により制御可能であり、
当該機能モジュール(27,28,29,30)は危険段階(A,B,C,D,E,F,G)の形式に依存して、光学的、音響的および触覚的信号装置、乗員保護システム、および車両(2)の機関制御部、制動装置および操舵装置を制御するための制御信号を送出する。
【請求項26】
請求項1から24までのいずれか1項記載の方法を実施するための装置において、
該装置は、周囲状況を検出するためのセンサ、例えば少なくとも1つのビデオシステム(2.1)および場合により付加的に、少なくとも1つのレーダシステム(2.2)またはライダーシステム、並びに車両(2)の運動量を検出するための複数のセンサ、例えば車輪回転数センサ(2.3)、ヨーイング速度センサ(2.4)、操舵角センサ(2.5)を含み、
該装置はさらに、センサ(2.1,2.2)の出力信号を処理するための機能モジュール(20)、並びにセンサ(2.3,2.4,2.5)の出力信号を処理するための機能モジュール(22)を含み、
該装置はさらに、注意度(A)を機能モジュール(21,22)の出力信号から検出するための機能モジュール(44)と、衝突危険度(K)を機能モジュール(22,23)の出力信号から検出するための機能モジュール(25)を含み、
該装置はさらに、機能モジュール(24,25)の出力信号を処理するための機能モジュール(26)を含み、
注意度(A)と衝突危険度(K)の組合せから危険段階(A,B,C,D,E,F,G)が検出され、
該装置はさらに機能モジュール(27,28,29,30)を含み、当該機能モジュール(27,28,29,30)は機能モジュール(26)の出力信号により制御可能であり、
当該機能モジュール(27,28,29,30)は危険段階(A,B,C,D,E,F,G)の形式に依存して、光学的、音響的および触覚的信号装置、乗員保護システム、および車両(2)の機関制御部、制動装置および操舵装置を制御するための制御信号を送出する。
【請求項27】
請求項25または26記載の装置において、
ビデオシステム(2.1)レーダシステム(2.2)、並びにさらなるセンサ(2.3,2.4,2.5)は車両(2)に固定して配置されており、車両(2)は自分の運動量と測定データを自車の周囲状況から自律的に検出することができる。
【図1】

【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公表番号】特表2006−500664(P2006−500664A)
【公表日】平成18年1月5日(2006.1.5)
【国際特許分類】
【出願番号】特願2004−538682(P2004−538682)
【出願日】平成15年7月17日(2003.7.17)
【国際出願番号】PCT/DE2003/002406
【国際公開番号】WO2004/029653
【国際公開日】平成16年4月8日(2004.4.8)
【出願人】(390023711)ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング (2,908)
【氏名又は名称原語表記】ROBERT BOSCH GMBH
【住所又は居所原語表記】Stuttgart, Germany
【Fターム(参考)】
【公表日】平成18年1月5日(2006.1.5)
【国際特許分類】
【出願日】平成15年7月17日(2003.7.17)
【国際出願番号】PCT/DE2003/002406
【国際公開番号】WO2004/029653
【国際公開日】平成16年4月8日(2004.4.8)
【出願人】(390023711)ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング (2,908)
【氏名又は名称原語表記】ROBERT BOSCH GMBH
【住所又は居所原語表記】Stuttgart, Germany
【Fターム(参考)】
[ Back to top ]