
車両の衝突エネルギ吸収装置
【課題】アンチロック・ブレーキ・システムを備えた車両において、フロントタイヤを利用した衝突エネルギの吸収を確実に行う。
【解決手段】フロントアンダーランプロテクタ4は、車両1の前端下部に支持されて車幅方向に延びる。エネルギ吸収体6は、フロントアンダーランプロテクタ4の後方で車両1の側部に支持され、フロントアンダーランプロテクタ4に近接する前面8aとフロントタイヤ15の前面15aに対向する後面9aとを有する。判定部が車両と他の車両が衝突する可能性が高い衝突発生前状態と判定したとき、制動制御部は車両1に対して自動制動による制動力を発生させるとともに、アンチロック・ブレーキ・システム・コントローラの作動を停止させる。
【解決手段】フロントアンダーランプロテクタ4は、車両1の前端下部に支持されて車幅方向に延びる。エネルギ吸収体6は、フロントアンダーランプロテクタ4の後方で車両1の側部に支持され、フロントアンダーランプロテクタ4に近接する前面8aとフロントタイヤ15の前面15aに対向する後面9aとを有する。判定部が車両と他の車両が衝突する可能性が高い衝突発生前状態と判定したとき、制動制御部は車両1に対して自動制動による制動力を発生させるとともに、アンチロック・ブレーキ・システム・コントローラの作動を停止させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、他の車両との衝突時に衝突エネルギを吸収する衝突エネルギ吸収装置に関する。
【背景技術】
【0002】
特開2002−274300号公報には、大型トラック等の車両の前面下部に配置され、普通乗用車等の他の車両との正面衝突時に他の車両の車台下へのもぐり込みを防止するフロントアンダーランプロテクタの取付構造が記載されている。この構造では、車両のメインフレームに取付ステーが固定され、取付ステーの下部前側にフロントアンダーランプロテクタが固定される。取付ステーの下部後側には、昇降用ステップが固定され、昇降用ステップの後部は、フロントタイヤの前方に所定の間隔を置いて位置する。他の車両がフロントアンダーランプロテクタに衝突して取付ステーが後方に大きく変形すると、昇降用ステップの後部がフロントタイヤに衝突し、フロントタイヤの弾性力によって他の車両の衝撃が吸収される。また、同公報には、フロントアンダーランプロテクタに昇降用ステップを固定しても良いことが記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2002−274300号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
一般に、アンチロック・ブレーキ・システム(ABS)を備えた車両では、衝突を回避するために運転者がブレーキペダルを急に踏み込むと、ABSが作動し、車輪は直ちに停止せず継続して回転する。このため、ABSを備えた車両に特開2002−274300号公報記載の構造を適用した場合、ABSの作動によって、昇降用ステップとの接触時にフロントタイヤが完全に停止せずに回転している可能性が高くなる。昇降用ステップが回転中のフロントタイヤに接触すると、昇降用ステップの後部とフロントタイヤとの間に動摩擦力が作用し、昇降用ステップの後部がフロントタイヤの回転方向への力を受けて下方へ変形する可能性がある。昇降用ステップの後部が下方へ変形すると、昇降用ステップの後部がフロントタイヤによって支持されず、フロントタイヤを利用した衝突エネルギの吸収が行われない可能性がある。
【0005】
そこで、本発明は、アンチロック・ブレーキ・システムを備えた車両において、フロントタイヤを利用した衝突エネルギの吸収を確実に行うことが可能な衝突エネルギ吸収装置の提供を目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成すべく、本発明は、車輪のロックを防止するために車輪に対する制動力を抑制するアンチロック・ブレーキ・システムを備えた車両の衝突エネルギ吸収装置であって、フロントアンダーランプロテクタと、プロテクタ移動規制体と、判定手段と、制御手段と、を備える。フロントアンダーランプロテクタは、車両の前端下部に支持されて車幅方向に延びる。プロテクタ移動規制体は、フロントアンダーランプロテクタの後方で車両の側部に支持され、フロントアンダーランプロテクタに近接又は接触する前面と車両のフロントタイヤの前面に対向する後面とを有する。判定手段は、車両と他の車両との衝突の可能性が高い衝突発生前状態か否かを判定する。制御手段は、衝突発生前状態であると判定手段が判定したとき、アンチロック・ブレーキ・システムの作動を停止する。
【0007】
上記構成では、運転者が他の車両との衝突を回避するために急なブレーキ操作を行い、車輪に対する制動力が急増すると、アンチロック・ブレーキ・システムが作動し、車輪に対する制動力が抑制される。すなわち、アンチロック・ブレーキ・システムの作動によって、車輪のロックを回避して、車両の操舵性を確保することができる。
【0008】
運転者からのブレーキ操作による衝突回避が困難となり、衝突の可能性が高い衝突発生前状態であると判定手段が判定すると、制御手段は、アンチロック・ブレーキ・システムの作動を停止するので、車輪は、運転者からのブレーキ操作に応じた制動力が付与されて停止する。このため、車両が他の車両に衝突し、フロントアンダーランプロテクタの端部が車両後方に変形してプロテクタ移動規制体の前面を押圧し、プロテクタ移動規制体が車両後方へ移動し、プロテクタ移動規制体の後面がフロントタイヤの前面に接触した際に、プロテクタ移動規制体の後部は、停止したフロントタイヤの前面によって確実に支持される。従って、フロントアンダーランプロテクタに入力する衝突エネルギをフロントタイヤの弾性力によって確実に吸収することができる。
【0009】
また、上記衝突エネルギ吸収装置は、制動手段を備えてもよい。制動手段は、衝突発生前状態であると判定手段が判定したとき、車輪に所定の制動力を付与する。
【0010】
上記構成では、判定手段が衝突発生前状態であると判定すると、制御手段はアンチロック・ブレーキ・システムの作動を停止し、制動手段は車輪に所定の制動力を付与するので、車輪は、運転者からの制動要求とは無関係に、制動手段が付与する所定の制動力に従って停止する。従って、運転者からのブレーキ操作に拘わらず、車両の衝突時にフロントタイヤの回転を確実に停止させることができ、衝突エネルギをフロントタイヤの弾性力によって確実に吸収することができる。
【発明の効果】
【0011】
本発明によれば、アンチロック・ブレーキ・システムを備えた車両において、他の車両との衝突時に発生する衝突エネルギを、フロントタイヤを利用して確実に吸収して他の車両に与える衝撃を緩和することができる。
【図面の簡単な説明】
【0012】
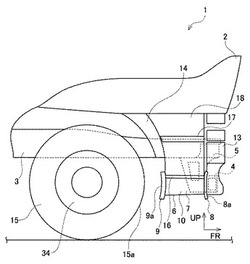
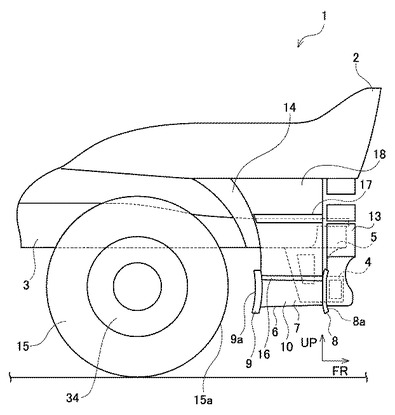
【図1】本発明の実施形態に係わる衝突エネルギ吸収装置を備えた車両の前方下部の側面図である。
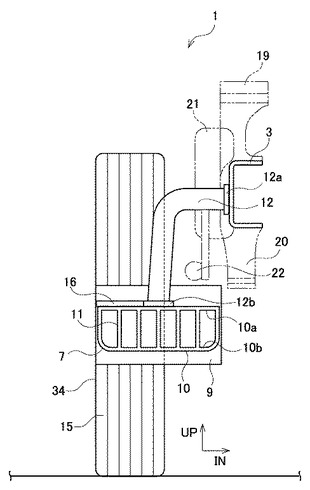
【図2】図1の前面図である。
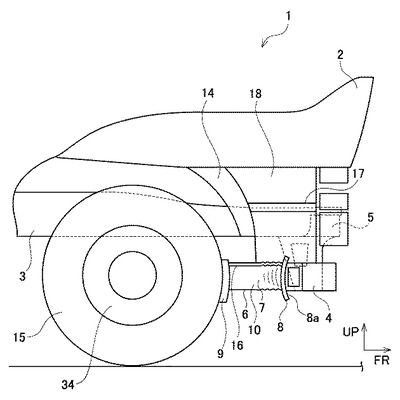
【図3】図1の車両の衝突時の状態を示す側面図である。
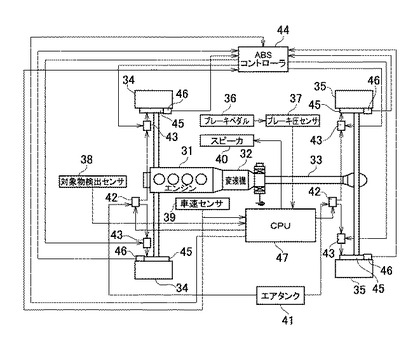
【図4】本発明の実施形態に係る車両の制動装置全体を表す概略図である。
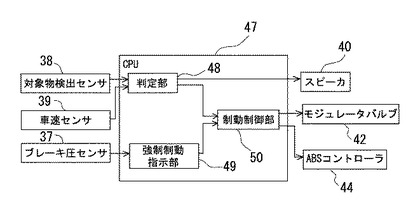
【図5】本発明の実施形態に係る車両の制動装置のブロック図である。
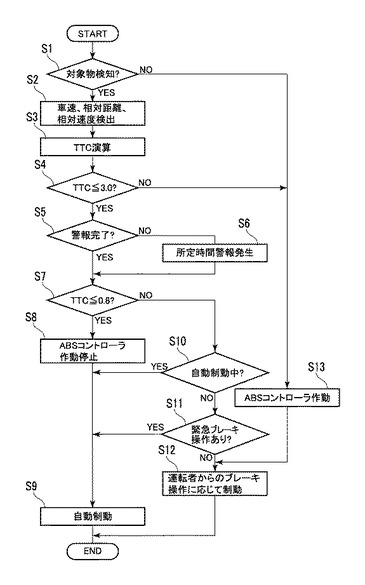
【図6】本発明の実施形態に係る車両の制動装置の制御内容を示すフローチャートである。
【発明を実施するための形態】
【0013】
以下、本発明の一実施形態を図面に基づいて説明する。なお、図中のFRは車両前方を、UPは上方を、INは車幅方向内側をそれぞれ示す。また、以下の説明において、前後方向は車両の進行方向の前後を意味し、左右方向は車両の進行方向前方を向いた状態での左右を意味する。
【0014】
図1及び図2に示すように、本実施形態の衝突エネルギ吸収装置が搭載されるキャブオーバートラック(車両)1は、キャブ2と、メインフレーム3と、フロントアンダーランプロテクタ(以下、FUPと称する)4と、フロントアンダーランプロテクタブラケット5と、エネルギ吸収体(プロテクタ移動規制体)6と、フロントタイヤ15等を備えている。また図4に示すように、車両1は、エンジン31と、変速機32と、プロペラシャフト33と、前輪(車輪)34と、後輪(車輪)35と、ブレーキペダル36と、ブレーキ圧センサ37と、対象物検出センサ38と、車速センサ39と、スピーカ40と、モジュレータバルブ(制動手段)42と、ABSバルブ(アンチロック・ブレーキ・システム)43と、アンチロック・ブレーキ・システム・コントローラ(アンチロック・ブレーキ・システム)44と、ディスクブレーキ45(制動手段)と、車輪速センサ(アンチロック・ブレーキ・システム)46と、CPU47等を備えている。
【0015】
メインフレーム3は、車両1の車幅方向両側で車両前後方向に延びており、クロスメンバによって、左右各メインフレーム3の前端部間が連結されている。メインフレーム3の前端部には、下方へ延びる左右一対のフロントアンダーランプロテクタブラケット5が固定されている。FUP4は、矩形筒状であり、フロントアンダーランプロテクタブラケット5の前面に固定されて車幅方向に延びている。車両前部にはFUP4の前端部を覆うフロントバンパ13が設けられている。フロントタイヤ15は、前輪34の外周部を構成している。キャブ2の下部に固定されるフェンダ14は、フロントタイヤ15の斜め前方上半分を覆っている。
【0016】
図1及び図2に示すように、エネルギ吸収体6は、FUP4とフロントタイヤ15との間に配置され、管状のブラケット12によって車体側に支持されている。ブラケット12は、メインフレーム3の外側部に固定されるフランジ状の一端12aと、エネルギ吸収体6の上部が固定されるフランジ状の他端12bとを一体的に有し、一端12aから他端12bへ向かって車幅方向外側へ延びて下方へ曲折する。エネルギ吸収体6は、右側と左側とがそれぞれ同様の構成を有するため、以下ではその一方(右側)について説明し、他方(左側)についての説明を省略する。
【0017】
エネルギ吸収体6は、本体7とキャッチャ8とストッパ9とを有する。本体7は、前後で開口する矩形筒状の外周板10と複数の仕切板11とを一体的に有し、外周板10の上面にブラケット12の他端12bが固定される。複数の仕切板11は、外周板10の内部に配置され、所定の間隔をおいて車幅方向に並ぶ。各仕切板11は、起立した状態で前後方向に延び、各仕切板11の上端縁及び下端縁は、外周板10の内側下面10aと内側上面10bとにそれぞれ接合されている。
【0018】
キャッチャ8は、本体7の前端面に固定されて本体7の前側開口を閉止する。キャッチャ8の前面8a(プロテクタ移動規制体の前面)は、FUP4の端部の後面に近接して位置している。キャッチャ8は、車幅方向の長さが本体7とほぼ等しく、上下方向の長さが本体7の前端部よりも長い板状である。キャッチャ8の上端部及び下端部は、本体7の前端部からそれぞれ上下に突出して前方(FUP4側)へ湾曲している。この湾曲によって、FUP4の端部が後方へ変形してキャッチャ8の前面8aに当接した際に、FUP4の端部の上下方向への移動が規制される。
【0019】
ストッパ9は、本体7の後端部に固定されて本体7の後側開口を閉止する。ストッパ9の後面9a(プロテクタ移動規制体の後面)は、フェンダ14の下方に位置し、フロントタイヤ15の前面15aに対向する。ストッパ9は、車幅方向の長さが本体7の幅とほぼ等しく、上下方向の長さが本体7の後端部よりも長い板状である。ストッパ9の上端部及び下端部は、エネルギ吸収体本体7の後端部からそれぞれ上下に突出している。ストッパ9の後面9aは、フロントタイヤ15の外周に沿って円弧状に湾曲しており、衝突発生によりエネルギ吸収体6が後方に変移した時にフロントタイヤ15の前面15aに広い範囲で面接触する。車両1の前方衝突時において、エネルギ吸収体6に前方からの衝撃荷重が入力し、且つエネルギ吸収体6の後方への移動が規制されている場合、外周板10及び複数の仕切板11がそれぞれ潰れ変形を起こす。この本体7の潰れ変形によって、エネルギ吸収体6に入力する衝突エネルギが効率的に吸収される。
【0020】
図1及び図2に示すように、エネルギ吸収体6の本体7の上面には、平板状のファーストステップ16が固定され、ファーストステップ16の上方には、セカンドステップ17が設けられている。ファーストステップ16は、ブラケット12の車幅方向外側に配置され、セカンドステップ17は、ブラケット12の上方に配置される。これらのステップ16,17は、乗員がキャブ2に乗降する際の足場として機能する。セカンドステップ17は、キャブ2の車幅方向外側の底部から下方へ延びるステップパネル18の中間部に固定されている。ステップパネル18は、車幅方向外側に開口する略U字形のパネルであり、ステップパネル18の後面の上部は、フェンダ14に沿って湾曲し、ステップパネル18の下端は、ファーストステップ16に近接する。
【0021】
図2に示すように、メインフレーム3の前部上部にはキャブ2を支持するためのキャブマウント19が固定されており、メインフレーム3の前部下部には前輪34の回転軸を支持するためのスプリングブラケット20が固定されている。また車両の進行方向右側のフレーム3の前部上部には操舵のためのステアリングユニット21が固定され、ステアリングユニット21にはドラックリンク22が連結されている。なお、図2では、キャブ2、フロントバンパ13、フロントアンダーランプロテクタ4、フロントアンダーランプロテクタブラケット5、キャッチャ8、ステップパネル18及びセカンドステップ17の図示を省略している。
【0022】
図4に示すように、エンジン31の出力は、変速機32の入力軸に伝えられ、変速機32の出力軸の回転は、プロペラシャフト33を介して駆動輪たる後輪35に伝達される。
【0023】
運転者によって操作されるブレーキペダル36には、ブレーキ圧センサ37が接続されている。ブレーキ圧センサ37は、運転者がブレーキペダル36を踏むことによって生じるブレーキ圧の変化を検出し、CPU47に検出信号を出力する。
【0024】
対象物検出センサ38は、車両1の前方に向けてレーザーやミリ波等の電磁波を発信し、その反射波に基づいて対象物と車両1との相対距離及び相対速度を検出し、CPU47に検出信号を出力する。
【0025】
スピーカ40は、CPU47からの信号によってブザー音や音声を出力する。
【0026】
モジュレータバルブ42には、所定圧力の空気を備蓄するエアタンク41が接続されている。モジュレータバルブ42は、CPU47からの信号によって、前輪34及び後輪35(以下、車輪34,35と称す)に対する制動力に対応した制動圧を発生させ、ABSバルブ43に伝達する。
【0027】
ABSバルブ43は、モジュレータバルブ42から伝達される制動圧を、ABSコントローラ44からの信号によって調整し、ディスクブレーキ45に付与する。
【0028】
ディスクブレーキ45は、車輪34,35に設けられ、ABSバルブ43から付与される制動圧によって車輪34,35に制動力を発生させる。
【0029】
車速センサ39は、エンジン31の回転数などから現在の車両1の速度を検出し、アンチロック・ブレーキ・システム・コントローラ44及びCPU47に検出信号を出力する。
【0030】
車輪速センサ46は、車輪34,35の現在の車輪速度を検出し、アンチロック・ブレーキ・システム・コントローラ44に検出信号を出力する。
【0031】
アンチロック・ブレーキ・システム・コントローラ(以下、ABSコントローラと称す)44は、車輪34,35のロックを防止するためにABSバルブ43に信号を送ってモジュレータバルブ42から伝達される制動圧を調整し、車輪34,35に対する制動力を抑制する。すなわち、ABSコントローラ44は、車速センサ39から得られる車速と車輪速センサ46から得られる各車輪の車輪速との比較を行う。車速よりも車輪速が減少して、車速と車輪速との差が所定値を超えた場合は、ABSバルブ43に信号を送り、モジュレータバルブ42からの制動圧を減少させてディスクブレーキ45に発生する制動力を弱める。車輪速が増加して、車速と車輪速との差が所定値以内に入ると、ABSバルブ43に信号を送り、減少させた制動圧をモジュレータバルブ42からの制動圧に戻して、ディスクブレーキ45に発生する制動力を回復させる。ABSコントローラ44は、この動作を車速と車輪速との差に応じて繰り返すことによって車輪34,35に対する制動力を抑制し、車輪34,35のロックの発生を防止する。
【0032】
図5のブロック図に示すように、CPU47には、判定部(判定手段)48と、強制制動指示部49と、制動制御部(制御手段及び制動手段)50と、が設けられる。
【0033】
判定部48は、対象物検出センサ8が検出した車両1と他の車両を含む対象物との相対距離及び相対速度、並びに車速センサ9が検出した車両1の車速及び加速度に基づいて、車両1と対象物とが衝突する可能性が高い衝突発生前状態であるか否かを判定する。具体的には、車両1と対象物との相対距離が所定の閾値を下回った場合、車両1が対象物に接近する相対速度が所定の閾値を上回った場合、又は車両1と対象物との相対距離を相対速度で除することによって求められる衝突余裕時間TTC(Time To Collision)の値が3.0秒以下である場合に、判定部48は車両1と対象物とが衝突する可能性が高い第1の衝突発生前状態であると判定する。また、TTCの値が0.8秒以下である場合に、判定部48は、車両1と対象物とが衝突する可能性が第1の衝突発生前状態よりも高い第2の衝突発生前状態(衝突発生前状態)であると判定する。判定部48は、第1の衝突発生前状態であると判定すると、スピーカ10に信号を出力してスピーカ10を作動させ、運転者に車両1と対象物とが衝突する可能性が高いことを報知するための警報(ブザー音や音声)を発生させる。また、判定部48は、第2の衝突発生前状態であると判定すると、制動制御部50に信号を出力する。
【0034】
強制制動指示部49は、ブレーキ圧センサ37からの信号の有無に基づいて、運転者からの制動要求の有無を判定する。すなわち、運転者がブレーキペダル36を踏み込んだことをブレーキ圧センサ37が検出した場合に、運転者からの制動要求があったと判定する。また、強制制動指示部49は、運転者からの制動要求があった場合(運転者がブレーキペダル36を踏み込んだ場合)、その制動要求が緊急性を要する要求であるか否か(ブレーキペダル36の踏み込み態様が緊急性を要する態様であるか否か)を判定する。具体的には、ブレーキ圧センサ37が検出したブレーキ圧及び該ブレーキ圧の微分値の所定微小時間における変化量に基づいて、第1の所定値に対するブレーキ圧の変化量が大きく、且つ第2の所定値に対するブレーキ圧の微分値の変化量が大きい場合、強制制動指示部49は、運転者からの制動要求が緊急性を要する要求であると判定して制動制御部50に強制制動指示信号を出力する。また、第1の所定値に対するブレーキ圧の変化量が小さく、且つ第2の所定値に対するブレーキ圧の微分値の変化量が大きい場合、強制制動指示部49は、運転者からの制動要求が緊急性を要する要求ではないと判定して制動制御部50に強制制動指示信号を出力しない。
【0035】
制動制御部50は、モジュレータバルブ42に信号を送り、車輪34,35の制動に必要な制動力に対応した制動圧を発生させる。すなわち、制動制御部50は、運転者がブレーキペダル36を踏み込んだときには、ブレーキ圧センサ37が検出したブレーキ圧に基づいて、ブレーキ操作に応じた制動力に対応する制動圧を発生させる。また、強制制動指示部49から強制制動指示信号を受信したときは、制動制御部50は、自動制動による制動力(所定の制動力)に対応した制動圧を発生させる。これは、第1の衝突発生前状態と判定された後で運転者からの緊急を要するブレーキ操作があったときに、自動制動による制動力を発生させ、衝突回避のために運転者の緊急ブレーキ操作を補助するためである。本実施形態では、自動制動による制動力は、ディスクブレーキ45が発生可能な最大制動力に設定されている。また、判定部48からの信号(第2の衝突発生前状態と判定したときの信号)を受信したときには、自動制動による制動力に対応した制動圧を発生させるとともに、ABSコントローラ44に信号を送り、ABSコントローラ44の作動を停止する。これは、運転者のブレーキ操作の有無に拘わらず、衝突回避のために自動制動による制動力を発生させるとともに、衝突時に備えて、車輪34,35を停止させるためである。なお、制動制御部50が強制制動指示部49から強制制動指示信号を受信したときの自動制動による制動力と、制動制御部50が判定部48からの信号を受信したときの自動制動による制動力とは大きさが相違していてもよく、またその大きさもディスクブレーキ45が発生可能な最大制動力に限定されるものではない。
【0036】
次に、図6のフローチャートを用いて、本実施形態のCPU47が実行する車両1の制動に関する制御処理について説明する。本処理は、車両のエンジン駆動により開始し、所定時間毎に実行される。
【0037】
まず、対象物検出センサ48が対象物を検出してその検出信号が入力されたか否かを判定する(ステップS1)。対象物検出センサ48からの検出信号が入力された場合は、対象物検出センサ48及び車速センサ49から入力された信号に基づいて対象物との相対距離、相対速度、及び車速を検出し(ステップS2)、検出した相対距離、相対速度及び車速に基づいてTTCを演算し(ステップS3)ステップS4へ移行する。
【0038】
ステップS1において、対象物検出センサ48からの検出信号が入力されていない場合は、ステップS13に移行してABSコントローラ44を作動させた後、ステップ12に移行して、運転者からのブレーキ操作に応じて通常の制動力を発生させる。なお、ステップS13に移行しABSコントローラ44を作動させるのは、後述のようにTTCが0.8秒以下と判定されて(ステップS7)、ABSコントローラ44を停止し(ステップS8)、車両1に対して自動制動による制動力を発生(ステップS9)させた結果、車両1が減速して対象物が検出されなくなった場合に、停止したABSコントローラ44を再び作動させるためである。
【0039】
ステップS4では、TTCが3.0秒以下であるか否か(第1の衝突発生前状態であるか否か)を判定する。TTCが3.0秒以下であると判定したときは、ステップS5に移行する。ステップS5では、第1の衝突発生前状態であることを報知する警報の発生が完了したか否かを判定し、既に完了している場合はステップS7に移行する。一方、警報を未だ発していない又は発している途中である場合は、ステップS6に移行して警報を発生させ又は継続した後、ステップS7へ移行する。
【0040】
ステップS4において、TTCが3.0秒を超えていると判定したときは、対象物との関係において緊急性を要しない通常状態である可能性が高いため、ステップS13に移行してABSコントローラ44を作動させた後、ステップS12に移行して、運転者からのブレーキ操作に応じて通常の制動力を発生させる。なお、ステップS13に移行しABSコントローラ44を作動させるのは、後述のようにTTCが0.8秒以下と判定されてステップS7)、ABSコントローラ44を停止し(ステップS8)、車両1に対して自動制動による制動力を発生(ステップS9)させた結果、車両1が減速してTTCが3秒以上になった場合に、停止したABSコントローラ44を再び作動させるためである。
【0041】
ステップS7では、TTCが0.8秒以下であるか否か(第2の衝突発生前状態であるか否か)を判定する。TTCが0.8秒以下であるときは、ステップS8に移行してABSコントローラ44の作動を停止させた後、ステップS9に移行して自動制動による制動力を発生させる。
【0042】
TTCが0.8秒を超えていると判定した場合は、自動制動を実行している最中か否かを判定する(ステップ10)。ステップS10において、自動制動を実行している最中と判定した場合は、ステップS9に移行して、自動制動による制動力を継続して発生させる。一方、ステップS10において、自動制動が実行されていないと判定したときは、ステップS11へ移行して、運転者から緊急性を要する制動要求があったか否か(運転者からの緊急ブレーキ操作があったか否か)を判定する。緊急ブレーキ操作があったと判定した場合には、対象物との衝突を回避する必要性がある可能性が高いため、ステップS9に移行し、自動制動による制動力を発生させる。一方、緊急ブレーキ操作がなかったと判定した場合には、運転者からのブレーキ操作に応じて通常の制動力を発生させる(ステップS12)。
【0043】
本実施形態では、運転者がブレーキ操作を行うと、制動制御部50が運転者のブレーキ操作に対応した制動力を車輪34,35に対して付与する。運転者が、他の車両との衝突を回避するために急なブレーキ操作を行い、車輪34,35に対する制動力を急増させると、ABSコントローラ44が作動し、車輪34,35に対する制動力が抑制される。すなわち、ABSコントローラ44の作動によって、車輪34,35のロックを回避して、車両1の操舵性を確保することができる。
【0044】
第1の衝突発生前状態(TTCが3秒以下)であると判定部48が判定した後に、運転者がブレーキ操作を行い、緊急を要するブレーキ操作であると強制制動指示部49が判定した場合は、制動制御部50は、第2の衝突発生前状態(TTCが0.8秒以下)であると判定部48が判定するよりも早いタイミングで、自動制動による制動力を車輪34,35に付与する。従って、運転者は、ABSコントローラ44の作動によって車輪34,35のロックを回避しつつ、車両1を十分に減速させることができる。運転者のブレーキ操作が緊急を要するものではないと強制制動指示部49が判定した場合には、制動制御部50は、運転者のブレーキ操作に対応した通常の制動力のみを車輪34,35に付与するので、車輪34,35に対して必要以上の制動力が不用意に付与されてしまうことが防止され、運転操作時の違和感の発生や乗り心地の低下や積荷の荷崩れなどの不都合を回避することができる。
【0045】
運転者からのブレーキ操作による衝突回避が困難となり、第2の衝突発生前状態であると判定部48が判定した場合は、制動制御部50は、ABSコントローラ44の作動を停止し、自動制動による制動力を車輪34,35に付与する。従って、車輪34,35は、運転者によるブレーキ操作とは無関係に、制動制御部50が付与する自動制動による制動力によって停止する。
【0046】
第2の衝突発生前状態であると判定部48が判定した後に、車両1が他の車両に衝突した場合、FUP4の端部が車両後方に変形してエネルギ吸収体6の前面8aを押圧し、エネルギ吸収体6が車両後方へ移動し、エネルギ吸収体6の後面9aは、停止したフロントタイヤ15の前面15aに接触する。このため、エネルギ吸収体6の後部は、フロントタイヤ15の前面15aによって確実に支持され、エネルギ吸収体6の車両後方への移動がフロントタイヤ15によって規制される。従って、運転者からのブレーキ操作に拘わらず、FUP4に入力する衝突エネルギを、エネルギ吸収体6の変形によって確実に吸収することができる。また、エネルギ吸収体がフロントタイヤ15の前面15aで確実に支持されるので、フロントタイヤ15の弾性力によって衝突エネルギを確実に吸収することができる。
【0047】
なお、制動制御部50は、第2の衝突発生前状態であると判定部48が判定するとき、自動制動による制動力を発生させることなくABSコントローラ44の作動を停止してもよい。この場合であっても、運転者が衝突回避のために急なブレーキ操作を行っていると、ABSコントローラ44の作動停止により、車輪34,35は運転者からのブレーキ操作に応じた制動力によって停止する。このため、車両1と他の車両とが衝突した場合、エネルギ吸収体6の後部は、停止したフロントタイヤ15の前面15aによって確実に支持される。従って、FUP4に入力する衝突エネルギを、エネルギ吸収体6の変形によって確実に吸収することができる。また、エネルギ吸収体6がフロントタイヤ15の前面15aによって確実に支持されるので、フロントタイヤ15の弾性力によって衝突エネルギを確実に吸収することができる。
【0048】
また、エネルギ吸収体6は、FUP4の後方への移動を規制する部材であればよく、例えば単なる筒状部材等であってもよい。この場合は、車両1と他の車両の衝突時に、筒状部材の後部が停止したフロントタイヤ15の前面15aで確実に支持されるので、FUP4に入力する衝突エネルギをフロントタイヤ15の弾性力によって確実に吸収することができる。
【0049】
また、エネルギ吸収体6は、車体側に支持されていればよく、例えば、FUP4に支持されていてもよい。
【0050】
以上、本発明者によってなされた発明を適用した実施形態について説明したが、この実施形態による本発明の開示の一部をなす論述及び図面により本発明は限定されることはない。すなわち、この実施形態に基づいて当業者等によりなされる他の実施形態、実施例及び運用技術等は全て本発明の範疇に含まれることは勿論であることを付け加えておく。
【産業上の利用可能性】
【0051】
本発明は、貨物車両などの大型の車両に広く適用可能である。
【符号の説明】
【0052】
1 キャブオーバートラック(車両)
3 メインフレーム
4 フロントアンダーランプロテクタ
6 エネルギ吸収体(プロテクタ移動規制体)
7 本体
8 キャッチャ
8a キャッチャの前面(プロテクタ移動規制体の前面)
9 ストッパ
9a ストッパの後面(プロテクタ移動規制体の後面)
12 ブラケット
15 フロントタイヤ
34 前輪(車輪)
35 後輪(車輪)
42 モジュレータバルブ(制動手段)
43 ABSバルブ(アンチロック・ブレーキ・システム)
44 ABSコントローラ(アンチロック・ブレーキ・システム)
45 ディスクブレーキ(制動手段)
46 車輪速センサ(アンチロック・ブレーキ・システム)
47 CPU
48 判定部(判定手段)
49 強制制動指示部
50 制動制御部(制御手段、制動手段)
【技術分野】
【0001】
本発明は、他の車両との衝突時に衝突エネルギを吸収する衝突エネルギ吸収装置に関する。
【背景技術】
【0002】
特開2002−274300号公報には、大型トラック等の車両の前面下部に配置され、普通乗用車等の他の車両との正面衝突時に他の車両の車台下へのもぐり込みを防止するフロントアンダーランプロテクタの取付構造が記載されている。この構造では、車両のメインフレームに取付ステーが固定され、取付ステーの下部前側にフロントアンダーランプロテクタが固定される。取付ステーの下部後側には、昇降用ステップが固定され、昇降用ステップの後部は、フロントタイヤの前方に所定の間隔を置いて位置する。他の車両がフロントアンダーランプロテクタに衝突して取付ステーが後方に大きく変形すると、昇降用ステップの後部がフロントタイヤに衝突し、フロントタイヤの弾性力によって他の車両の衝撃が吸収される。また、同公報には、フロントアンダーランプロテクタに昇降用ステップを固定しても良いことが記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2002−274300号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
一般に、アンチロック・ブレーキ・システム(ABS)を備えた車両では、衝突を回避するために運転者がブレーキペダルを急に踏み込むと、ABSが作動し、車輪は直ちに停止せず継続して回転する。このため、ABSを備えた車両に特開2002−274300号公報記載の構造を適用した場合、ABSの作動によって、昇降用ステップとの接触時にフロントタイヤが完全に停止せずに回転している可能性が高くなる。昇降用ステップが回転中のフロントタイヤに接触すると、昇降用ステップの後部とフロントタイヤとの間に動摩擦力が作用し、昇降用ステップの後部がフロントタイヤの回転方向への力を受けて下方へ変形する可能性がある。昇降用ステップの後部が下方へ変形すると、昇降用ステップの後部がフロントタイヤによって支持されず、フロントタイヤを利用した衝突エネルギの吸収が行われない可能性がある。
【0005】
そこで、本発明は、アンチロック・ブレーキ・システムを備えた車両において、フロントタイヤを利用した衝突エネルギの吸収を確実に行うことが可能な衝突エネルギ吸収装置の提供を目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成すべく、本発明は、車輪のロックを防止するために車輪に対する制動力を抑制するアンチロック・ブレーキ・システムを備えた車両の衝突エネルギ吸収装置であって、フロントアンダーランプロテクタと、プロテクタ移動規制体と、判定手段と、制御手段と、を備える。フロントアンダーランプロテクタは、車両の前端下部に支持されて車幅方向に延びる。プロテクタ移動規制体は、フロントアンダーランプロテクタの後方で車両の側部に支持され、フロントアンダーランプロテクタに近接又は接触する前面と車両のフロントタイヤの前面に対向する後面とを有する。判定手段は、車両と他の車両との衝突の可能性が高い衝突発生前状態か否かを判定する。制御手段は、衝突発生前状態であると判定手段が判定したとき、アンチロック・ブレーキ・システムの作動を停止する。
【0007】
上記構成では、運転者が他の車両との衝突を回避するために急なブレーキ操作を行い、車輪に対する制動力が急増すると、アンチロック・ブレーキ・システムが作動し、車輪に対する制動力が抑制される。すなわち、アンチロック・ブレーキ・システムの作動によって、車輪のロックを回避して、車両の操舵性を確保することができる。
【0008】
運転者からのブレーキ操作による衝突回避が困難となり、衝突の可能性が高い衝突発生前状態であると判定手段が判定すると、制御手段は、アンチロック・ブレーキ・システムの作動を停止するので、車輪は、運転者からのブレーキ操作に応じた制動力が付与されて停止する。このため、車両が他の車両に衝突し、フロントアンダーランプロテクタの端部が車両後方に変形してプロテクタ移動規制体の前面を押圧し、プロテクタ移動規制体が車両後方へ移動し、プロテクタ移動規制体の後面がフロントタイヤの前面に接触した際に、プロテクタ移動規制体の後部は、停止したフロントタイヤの前面によって確実に支持される。従って、フロントアンダーランプロテクタに入力する衝突エネルギをフロントタイヤの弾性力によって確実に吸収することができる。
【0009】
また、上記衝突エネルギ吸収装置は、制動手段を備えてもよい。制動手段は、衝突発生前状態であると判定手段が判定したとき、車輪に所定の制動力を付与する。
【0010】
上記構成では、判定手段が衝突発生前状態であると判定すると、制御手段はアンチロック・ブレーキ・システムの作動を停止し、制動手段は車輪に所定の制動力を付与するので、車輪は、運転者からの制動要求とは無関係に、制動手段が付与する所定の制動力に従って停止する。従って、運転者からのブレーキ操作に拘わらず、車両の衝突時にフロントタイヤの回転を確実に停止させることができ、衝突エネルギをフロントタイヤの弾性力によって確実に吸収することができる。
【発明の効果】
【0011】
本発明によれば、アンチロック・ブレーキ・システムを備えた車両において、他の車両との衝突時に発生する衝突エネルギを、フロントタイヤを利用して確実に吸収して他の車両に与える衝撃を緩和することができる。
【図面の簡単な説明】
【0012】
【図1】本発明の実施形態に係わる衝突エネルギ吸収装置を備えた車両の前方下部の側面図である。
【図2】図1の前面図である。
【図3】図1の車両の衝突時の状態を示す側面図である。
【図4】本発明の実施形態に係る車両の制動装置全体を表す概略図である。
【図5】本発明の実施形態に係る車両の制動装置のブロック図である。
【図6】本発明の実施形態に係る車両の制動装置の制御内容を示すフローチャートである。
【発明を実施するための形態】
【0013】
以下、本発明の一実施形態を図面に基づいて説明する。なお、図中のFRは車両前方を、UPは上方を、INは車幅方向内側をそれぞれ示す。また、以下の説明において、前後方向は車両の進行方向の前後を意味し、左右方向は車両の進行方向前方を向いた状態での左右を意味する。
【0014】
図1及び図2に示すように、本実施形態の衝突エネルギ吸収装置が搭載されるキャブオーバートラック(車両)1は、キャブ2と、メインフレーム3と、フロントアンダーランプロテクタ(以下、FUPと称する)4と、フロントアンダーランプロテクタブラケット5と、エネルギ吸収体(プロテクタ移動規制体)6と、フロントタイヤ15等を備えている。また図4に示すように、車両1は、エンジン31と、変速機32と、プロペラシャフト33と、前輪(車輪)34と、後輪(車輪)35と、ブレーキペダル36と、ブレーキ圧センサ37と、対象物検出センサ38と、車速センサ39と、スピーカ40と、モジュレータバルブ(制動手段)42と、ABSバルブ(アンチロック・ブレーキ・システム)43と、アンチロック・ブレーキ・システム・コントローラ(アンチロック・ブレーキ・システム)44と、ディスクブレーキ45(制動手段)と、車輪速センサ(アンチロック・ブレーキ・システム)46と、CPU47等を備えている。
【0015】
メインフレーム3は、車両1の車幅方向両側で車両前後方向に延びており、クロスメンバによって、左右各メインフレーム3の前端部間が連結されている。メインフレーム3の前端部には、下方へ延びる左右一対のフロントアンダーランプロテクタブラケット5が固定されている。FUP4は、矩形筒状であり、フロントアンダーランプロテクタブラケット5の前面に固定されて車幅方向に延びている。車両前部にはFUP4の前端部を覆うフロントバンパ13が設けられている。フロントタイヤ15は、前輪34の外周部を構成している。キャブ2の下部に固定されるフェンダ14は、フロントタイヤ15の斜め前方上半分を覆っている。
【0016】
図1及び図2に示すように、エネルギ吸収体6は、FUP4とフロントタイヤ15との間に配置され、管状のブラケット12によって車体側に支持されている。ブラケット12は、メインフレーム3の外側部に固定されるフランジ状の一端12aと、エネルギ吸収体6の上部が固定されるフランジ状の他端12bとを一体的に有し、一端12aから他端12bへ向かって車幅方向外側へ延びて下方へ曲折する。エネルギ吸収体6は、右側と左側とがそれぞれ同様の構成を有するため、以下ではその一方(右側)について説明し、他方(左側)についての説明を省略する。
【0017】
エネルギ吸収体6は、本体7とキャッチャ8とストッパ9とを有する。本体7は、前後で開口する矩形筒状の外周板10と複数の仕切板11とを一体的に有し、外周板10の上面にブラケット12の他端12bが固定される。複数の仕切板11は、外周板10の内部に配置され、所定の間隔をおいて車幅方向に並ぶ。各仕切板11は、起立した状態で前後方向に延び、各仕切板11の上端縁及び下端縁は、外周板10の内側下面10aと内側上面10bとにそれぞれ接合されている。
【0018】
キャッチャ8は、本体7の前端面に固定されて本体7の前側開口を閉止する。キャッチャ8の前面8a(プロテクタ移動規制体の前面)は、FUP4の端部の後面に近接して位置している。キャッチャ8は、車幅方向の長さが本体7とほぼ等しく、上下方向の長さが本体7の前端部よりも長い板状である。キャッチャ8の上端部及び下端部は、本体7の前端部からそれぞれ上下に突出して前方(FUP4側)へ湾曲している。この湾曲によって、FUP4の端部が後方へ変形してキャッチャ8の前面8aに当接した際に、FUP4の端部の上下方向への移動が規制される。
【0019】
ストッパ9は、本体7の後端部に固定されて本体7の後側開口を閉止する。ストッパ9の後面9a(プロテクタ移動規制体の後面)は、フェンダ14の下方に位置し、フロントタイヤ15の前面15aに対向する。ストッパ9は、車幅方向の長さが本体7の幅とほぼ等しく、上下方向の長さが本体7の後端部よりも長い板状である。ストッパ9の上端部及び下端部は、エネルギ吸収体本体7の後端部からそれぞれ上下に突出している。ストッパ9の後面9aは、フロントタイヤ15の外周に沿って円弧状に湾曲しており、衝突発生によりエネルギ吸収体6が後方に変移した時にフロントタイヤ15の前面15aに広い範囲で面接触する。車両1の前方衝突時において、エネルギ吸収体6に前方からの衝撃荷重が入力し、且つエネルギ吸収体6の後方への移動が規制されている場合、外周板10及び複数の仕切板11がそれぞれ潰れ変形を起こす。この本体7の潰れ変形によって、エネルギ吸収体6に入力する衝突エネルギが効率的に吸収される。
【0020】
図1及び図2に示すように、エネルギ吸収体6の本体7の上面には、平板状のファーストステップ16が固定され、ファーストステップ16の上方には、セカンドステップ17が設けられている。ファーストステップ16は、ブラケット12の車幅方向外側に配置され、セカンドステップ17は、ブラケット12の上方に配置される。これらのステップ16,17は、乗員がキャブ2に乗降する際の足場として機能する。セカンドステップ17は、キャブ2の車幅方向外側の底部から下方へ延びるステップパネル18の中間部に固定されている。ステップパネル18は、車幅方向外側に開口する略U字形のパネルであり、ステップパネル18の後面の上部は、フェンダ14に沿って湾曲し、ステップパネル18の下端は、ファーストステップ16に近接する。
【0021】
図2に示すように、メインフレーム3の前部上部にはキャブ2を支持するためのキャブマウント19が固定されており、メインフレーム3の前部下部には前輪34の回転軸を支持するためのスプリングブラケット20が固定されている。また車両の進行方向右側のフレーム3の前部上部には操舵のためのステアリングユニット21が固定され、ステアリングユニット21にはドラックリンク22が連結されている。なお、図2では、キャブ2、フロントバンパ13、フロントアンダーランプロテクタ4、フロントアンダーランプロテクタブラケット5、キャッチャ8、ステップパネル18及びセカンドステップ17の図示を省略している。
【0022】
図4に示すように、エンジン31の出力は、変速機32の入力軸に伝えられ、変速機32の出力軸の回転は、プロペラシャフト33を介して駆動輪たる後輪35に伝達される。
【0023】
運転者によって操作されるブレーキペダル36には、ブレーキ圧センサ37が接続されている。ブレーキ圧センサ37は、運転者がブレーキペダル36を踏むことによって生じるブレーキ圧の変化を検出し、CPU47に検出信号を出力する。
【0024】
対象物検出センサ38は、車両1の前方に向けてレーザーやミリ波等の電磁波を発信し、その反射波に基づいて対象物と車両1との相対距離及び相対速度を検出し、CPU47に検出信号を出力する。
【0025】
スピーカ40は、CPU47からの信号によってブザー音や音声を出力する。
【0026】
モジュレータバルブ42には、所定圧力の空気を備蓄するエアタンク41が接続されている。モジュレータバルブ42は、CPU47からの信号によって、前輪34及び後輪35(以下、車輪34,35と称す)に対する制動力に対応した制動圧を発生させ、ABSバルブ43に伝達する。
【0027】
ABSバルブ43は、モジュレータバルブ42から伝達される制動圧を、ABSコントローラ44からの信号によって調整し、ディスクブレーキ45に付与する。
【0028】
ディスクブレーキ45は、車輪34,35に設けられ、ABSバルブ43から付与される制動圧によって車輪34,35に制動力を発生させる。
【0029】
車速センサ39は、エンジン31の回転数などから現在の車両1の速度を検出し、アンチロック・ブレーキ・システム・コントローラ44及びCPU47に検出信号を出力する。
【0030】
車輪速センサ46は、車輪34,35の現在の車輪速度を検出し、アンチロック・ブレーキ・システム・コントローラ44に検出信号を出力する。
【0031】
アンチロック・ブレーキ・システム・コントローラ(以下、ABSコントローラと称す)44は、車輪34,35のロックを防止するためにABSバルブ43に信号を送ってモジュレータバルブ42から伝達される制動圧を調整し、車輪34,35に対する制動力を抑制する。すなわち、ABSコントローラ44は、車速センサ39から得られる車速と車輪速センサ46から得られる各車輪の車輪速との比較を行う。車速よりも車輪速が減少して、車速と車輪速との差が所定値を超えた場合は、ABSバルブ43に信号を送り、モジュレータバルブ42からの制動圧を減少させてディスクブレーキ45に発生する制動力を弱める。車輪速が増加して、車速と車輪速との差が所定値以内に入ると、ABSバルブ43に信号を送り、減少させた制動圧をモジュレータバルブ42からの制動圧に戻して、ディスクブレーキ45に発生する制動力を回復させる。ABSコントローラ44は、この動作を車速と車輪速との差に応じて繰り返すことによって車輪34,35に対する制動力を抑制し、車輪34,35のロックの発生を防止する。
【0032】
図5のブロック図に示すように、CPU47には、判定部(判定手段)48と、強制制動指示部49と、制動制御部(制御手段及び制動手段)50と、が設けられる。
【0033】
判定部48は、対象物検出センサ8が検出した車両1と他の車両を含む対象物との相対距離及び相対速度、並びに車速センサ9が検出した車両1の車速及び加速度に基づいて、車両1と対象物とが衝突する可能性が高い衝突発生前状態であるか否かを判定する。具体的には、車両1と対象物との相対距離が所定の閾値を下回った場合、車両1が対象物に接近する相対速度が所定の閾値を上回った場合、又は車両1と対象物との相対距離を相対速度で除することによって求められる衝突余裕時間TTC(Time To Collision)の値が3.0秒以下である場合に、判定部48は車両1と対象物とが衝突する可能性が高い第1の衝突発生前状態であると判定する。また、TTCの値が0.8秒以下である場合に、判定部48は、車両1と対象物とが衝突する可能性が第1の衝突発生前状態よりも高い第2の衝突発生前状態(衝突発生前状態)であると判定する。判定部48は、第1の衝突発生前状態であると判定すると、スピーカ10に信号を出力してスピーカ10を作動させ、運転者に車両1と対象物とが衝突する可能性が高いことを報知するための警報(ブザー音や音声)を発生させる。また、判定部48は、第2の衝突発生前状態であると判定すると、制動制御部50に信号を出力する。
【0034】
強制制動指示部49は、ブレーキ圧センサ37からの信号の有無に基づいて、運転者からの制動要求の有無を判定する。すなわち、運転者がブレーキペダル36を踏み込んだことをブレーキ圧センサ37が検出した場合に、運転者からの制動要求があったと判定する。また、強制制動指示部49は、運転者からの制動要求があった場合(運転者がブレーキペダル36を踏み込んだ場合)、その制動要求が緊急性を要する要求であるか否か(ブレーキペダル36の踏み込み態様が緊急性を要する態様であるか否か)を判定する。具体的には、ブレーキ圧センサ37が検出したブレーキ圧及び該ブレーキ圧の微分値の所定微小時間における変化量に基づいて、第1の所定値に対するブレーキ圧の変化量が大きく、且つ第2の所定値に対するブレーキ圧の微分値の変化量が大きい場合、強制制動指示部49は、運転者からの制動要求が緊急性を要する要求であると判定して制動制御部50に強制制動指示信号を出力する。また、第1の所定値に対するブレーキ圧の変化量が小さく、且つ第2の所定値に対するブレーキ圧の微分値の変化量が大きい場合、強制制動指示部49は、運転者からの制動要求が緊急性を要する要求ではないと判定して制動制御部50に強制制動指示信号を出力しない。
【0035】
制動制御部50は、モジュレータバルブ42に信号を送り、車輪34,35の制動に必要な制動力に対応した制動圧を発生させる。すなわち、制動制御部50は、運転者がブレーキペダル36を踏み込んだときには、ブレーキ圧センサ37が検出したブレーキ圧に基づいて、ブレーキ操作に応じた制動力に対応する制動圧を発生させる。また、強制制動指示部49から強制制動指示信号を受信したときは、制動制御部50は、自動制動による制動力(所定の制動力)に対応した制動圧を発生させる。これは、第1の衝突発生前状態と判定された後で運転者からの緊急を要するブレーキ操作があったときに、自動制動による制動力を発生させ、衝突回避のために運転者の緊急ブレーキ操作を補助するためである。本実施形態では、自動制動による制動力は、ディスクブレーキ45が発生可能な最大制動力に設定されている。また、判定部48からの信号(第2の衝突発生前状態と判定したときの信号)を受信したときには、自動制動による制動力に対応した制動圧を発生させるとともに、ABSコントローラ44に信号を送り、ABSコントローラ44の作動を停止する。これは、運転者のブレーキ操作の有無に拘わらず、衝突回避のために自動制動による制動力を発生させるとともに、衝突時に備えて、車輪34,35を停止させるためである。なお、制動制御部50が強制制動指示部49から強制制動指示信号を受信したときの自動制動による制動力と、制動制御部50が判定部48からの信号を受信したときの自動制動による制動力とは大きさが相違していてもよく、またその大きさもディスクブレーキ45が発生可能な最大制動力に限定されるものではない。
【0036】
次に、図6のフローチャートを用いて、本実施形態のCPU47が実行する車両1の制動に関する制御処理について説明する。本処理は、車両のエンジン駆動により開始し、所定時間毎に実行される。
【0037】
まず、対象物検出センサ48が対象物を検出してその検出信号が入力されたか否かを判定する(ステップS1)。対象物検出センサ48からの検出信号が入力された場合は、対象物検出センサ48及び車速センサ49から入力された信号に基づいて対象物との相対距離、相対速度、及び車速を検出し(ステップS2)、検出した相対距離、相対速度及び車速に基づいてTTCを演算し(ステップS3)ステップS4へ移行する。
【0038】
ステップS1において、対象物検出センサ48からの検出信号が入力されていない場合は、ステップS13に移行してABSコントローラ44を作動させた後、ステップ12に移行して、運転者からのブレーキ操作に応じて通常の制動力を発生させる。なお、ステップS13に移行しABSコントローラ44を作動させるのは、後述のようにTTCが0.8秒以下と判定されて(ステップS7)、ABSコントローラ44を停止し(ステップS8)、車両1に対して自動制動による制動力を発生(ステップS9)させた結果、車両1が減速して対象物が検出されなくなった場合に、停止したABSコントローラ44を再び作動させるためである。
【0039】
ステップS4では、TTCが3.0秒以下であるか否か(第1の衝突発生前状態であるか否か)を判定する。TTCが3.0秒以下であると判定したときは、ステップS5に移行する。ステップS5では、第1の衝突発生前状態であることを報知する警報の発生が完了したか否かを判定し、既に完了している場合はステップS7に移行する。一方、警報を未だ発していない又は発している途中である場合は、ステップS6に移行して警報を発生させ又は継続した後、ステップS7へ移行する。
【0040】
ステップS4において、TTCが3.0秒を超えていると判定したときは、対象物との関係において緊急性を要しない通常状態である可能性が高いため、ステップS13に移行してABSコントローラ44を作動させた後、ステップS12に移行して、運転者からのブレーキ操作に応じて通常の制動力を発生させる。なお、ステップS13に移行しABSコントローラ44を作動させるのは、後述のようにTTCが0.8秒以下と判定されてステップS7)、ABSコントローラ44を停止し(ステップS8)、車両1に対して自動制動による制動力を発生(ステップS9)させた結果、車両1が減速してTTCが3秒以上になった場合に、停止したABSコントローラ44を再び作動させるためである。
【0041】
ステップS7では、TTCが0.8秒以下であるか否か(第2の衝突発生前状態であるか否か)を判定する。TTCが0.8秒以下であるときは、ステップS8に移行してABSコントローラ44の作動を停止させた後、ステップS9に移行して自動制動による制動力を発生させる。
【0042】
TTCが0.8秒を超えていると判定した場合は、自動制動を実行している最中か否かを判定する(ステップ10)。ステップS10において、自動制動を実行している最中と判定した場合は、ステップS9に移行して、自動制動による制動力を継続して発生させる。一方、ステップS10において、自動制動が実行されていないと判定したときは、ステップS11へ移行して、運転者から緊急性を要する制動要求があったか否か(運転者からの緊急ブレーキ操作があったか否か)を判定する。緊急ブレーキ操作があったと判定した場合には、対象物との衝突を回避する必要性がある可能性が高いため、ステップS9に移行し、自動制動による制動力を発生させる。一方、緊急ブレーキ操作がなかったと判定した場合には、運転者からのブレーキ操作に応じて通常の制動力を発生させる(ステップS12)。
【0043】
本実施形態では、運転者がブレーキ操作を行うと、制動制御部50が運転者のブレーキ操作に対応した制動力を車輪34,35に対して付与する。運転者が、他の車両との衝突を回避するために急なブレーキ操作を行い、車輪34,35に対する制動力を急増させると、ABSコントローラ44が作動し、車輪34,35に対する制動力が抑制される。すなわち、ABSコントローラ44の作動によって、車輪34,35のロックを回避して、車両1の操舵性を確保することができる。
【0044】
第1の衝突発生前状態(TTCが3秒以下)であると判定部48が判定した後に、運転者がブレーキ操作を行い、緊急を要するブレーキ操作であると強制制動指示部49が判定した場合は、制動制御部50は、第2の衝突発生前状態(TTCが0.8秒以下)であると判定部48が判定するよりも早いタイミングで、自動制動による制動力を車輪34,35に付与する。従って、運転者は、ABSコントローラ44の作動によって車輪34,35のロックを回避しつつ、車両1を十分に減速させることができる。運転者のブレーキ操作が緊急を要するものではないと強制制動指示部49が判定した場合には、制動制御部50は、運転者のブレーキ操作に対応した通常の制動力のみを車輪34,35に付与するので、車輪34,35に対して必要以上の制動力が不用意に付与されてしまうことが防止され、運転操作時の違和感の発生や乗り心地の低下や積荷の荷崩れなどの不都合を回避することができる。
【0045】
運転者からのブレーキ操作による衝突回避が困難となり、第2の衝突発生前状態であると判定部48が判定した場合は、制動制御部50は、ABSコントローラ44の作動を停止し、自動制動による制動力を車輪34,35に付与する。従って、車輪34,35は、運転者によるブレーキ操作とは無関係に、制動制御部50が付与する自動制動による制動力によって停止する。
【0046】
第2の衝突発生前状態であると判定部48が判定した後に、車両1が他の車両に衝突した場合、FUP4の端部が車両後方に変形してエネルギ吸収体6の前面8aを押圧し、エネルギ吸収体6が車両後方へ移動し、エネルギ吸収体6の後面9aは、停止したフロントタイヤ15の前面15aに接触する。このため、エネルギ吸収体6の後部は、フロントタイヤ15の前面15aによって確実に支持され、エネルギ吸収体6の車両後方への移動がフロントタイヤ15によって規制される。従って、運転者からのブレーキ操作に拘わらず、FUP4に入力する衝突エネルギを、エネルギ吸収体6の変形によって確実に吸収することができる。また、エネルギ吸収体がフロントタイヤ15の前面15aで確実に支持されるので、フロントタイヤ15の弾性力によって衝突エネルギを確実に吸収することができる。
【0047】
なお、制動制御部50は、第2の衝突発生前状態であると判定部48が判定するとき、自動制動による制動力を発生させることなくABSコントローラ44の作動を停止してもよい。この場合であっても、運転者が衝突回避のために急なブレーキ操作を行っていると、ABSコントローラ44の作動停止により、車輪34,35は運転者からのブレーキ操作に応じた制動力によって停止する。このため、車両1と他の車両とが衝突した場合、エネルギ吸収体6の後部は、停止したフロントタイヤ15の前面15aによって確実に支持される。従って、FUP4に入力する衝突エネルギを、エネルギ吸収体6の変形によって確実に吸収することができる。また、エネルギ吸収体6がフロントタイヤ15の前面15aによって確実に支持されるので、フロントタイヤ15の弾性力によって衝突エネルギを確実に吸収することができる。
【0048】
また、エネルギ吸収体6は、FUP4の後方への移動を規制する部材であればよく、例えば単なる筒状部材等であってもよい。この場合は、車両1と他の車両の衝突時に、筒状部材の後部が停止したフロントタイヤ15の前面15aで確実に支持されるので、FUP4に入力する衝突エネルギをフロントタイヤ15の弾性力によって確実に吸収することができる。
【0049】
また、エネルギ吸収体6は、車体側に支持されていればよく、例えば、FUP4に支持されていてもよい。
【0050】
以上、本発明者によってなされた発明を適用した実施形態について説明したが、この実施形態による本発明の開示の一部をなす論述及び図面により本発明は限定されることはない。すなわち、この実施形態に基づいて当業者等によりなされる他の実施形態、実施例及び運用技術等は全て本発明の範疇に含まれることは勿論であることを付け加えておく。
【産業上の利用可能性】
【0051】
本発明は、貨物車両などの大型の車両に広く適用可能である。
【符号の説明】
【0052】
1 キャブオーバートラック(車両)
3 メインフレーム
4 フロントアンダーランプロテクタ
6 エネルギ吸収体(プロテクタ移動規制体)
7 本体
8 キャッチャ
8a キャッチャの前面(プロテクタ移動規制体の前面)
9 ストッパ
9a ストッパの後面(プロテクタ移動規制体の後面)
12 ブラケット
15 フロントタイヤ
34 前輪(車輪)
35 後輪(車輪)
42 モジュレータバルブ(制動手段)
43 ABSバルブ(アンチロック・ブレーキ・システム)
44 ABSコントローラ(アンチロック・ブレーキ・システム)
45 ディスクブレーキ(制動手段)
46 車輪速センサ(アンチロック・ブレーキ・システム)
47 CPU
48 判定部(判定手段)
49 強制制動指示部
50 制動制御部(制御手段、制動手段)
【特許請求の範囲】
【請求項1】
車輪のロックを防止するために前記車輪に対する制動力を抑制するアンチロック・ブレーキ・システムを備えた車両の衝突エネルギ吸収装置であって、
前記車両の前端下部に支持されて車幅方向に延びるフロントアンダーランプロテクタと、
前記フロントアンダーランプロテクタの後方で前記車両の側部に支持され、前記フロントアンダーランプロテクタに近接又は接触する前面と前記車両のフロントタイヤの前面に対向する後面とを有するプロテクタ移動規制体と、
前記車両と他の車両との衝突の可能性が高い衝突発生前状態か否かを判定する判定手段と、
前記衝突発生前状態であると前記判定手段が判定したとき、前記アンチロック・ブレーキ・システムの作動を停止する制御手段と、を備えた
ことを特徴とする車両の衝突エネルギ吸収装置。
【請求項2】
請求項1に記載の車両の衝突エネルギ吸収装置であって、
前記衝突発生前状態であると前記判定手段が判定したとき、前記車輪に所定の制動力を付与する制動手段を備えた
ことを特徴とする車両の衝突エネルギ吸収装置。
【請求項1】
車輪のロックを防止するために前記車輪に対する制動力を抑制するアンチロック・ブレーキ・システムを備えた車両の衝突エネルギ吸収装置であって、
前記車両の前端下部に支持されて車幅方向に延びるフロントアンダーランプロテクタと、
前記フロントアンダーランプロテクタの後方で前記車両の側部に支持され、前記フロントアンダーランプロテクタに近接又は接触する前面と前記車両のフロントタイヤの前面に対向する後面とを有するプロテクタ移動規制体と、
前記車両と他の車両との衝突の可能性が高い衝突発生前状態か否かを判定する判定手段と、
前記衝突発生前状態であると前記判定手段が判定したとき、前記アンチロック・ブレーキ・システムの作動を停止する制御手段と、を備えた
ことを特徴とする車両の衝突エネルギ吸収装置。
【請求項2】
請求項1に記載の車両の衝突エネルギ吸収装置であって、
前記衝突発生前状態であると前記判定手段が判定したとき、前記車輪に所定の制動力を付与する制動手段を備えた
ことを特徴とする車両の衝突エネルギ吸収装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2012−144220(P2012−144220A)
【公開日】平成24年8月2日(2012.8.2)
【国際特許分類】
【出願番号】特願2011−6040(P2011−6040)
【出願日】平成23年1月14日(2011.1.14)
【出願人】(000000170)いすゞ自動車株式会社 (1,721)
【公開日】平成24年8月2日(2012.8.2)
【国際特許分類】
【出願日】平成23年1月14日(2011.1.14)
【出願人】(000000170)いすゞ自動車株式会社 (1,721)
[ Back to top ]