
車両の視覚支援装置
【課題】車両の走行状態と道路情報を関連づけた情報として蓄積し、乗員が視認したい車両周辺の画像を選択して、表示する車両周辺の視覚支援装置を提供する。
【解決手段】前記車両の周辺を撮像する複数の撮像手段(10)と、道路を走行している前記車両の、少なくとも現在位置および時刻を含む走行状態(31)を検出する走行状態検出手段(30)と、少なくとも前記現在位置近傍を含み、前記車両の走行に関わる前記道路の情報が取得されたもしくは記憶された道路情報確認手段(20)と、前記撮像された画像を選択する画像選択手段(40)と、前記選択された画像を表示する表示手段(50)と、を備え、前記画像選択手段(40)は、前記車両が前記現在位置から前記道路情報確認手段(20)によって前記走行状態(31)の変化が予想される変化予想地点へ移動しようとするときに予想される前記走行状態(31)の変化に応じて画像を自動選択する構成とした。
【解決手段】前記車両の周辺を撮像する複数の撮像手段(10)と、道路を走行している前記車両の、少なくとも現在位置および時刻を含む走行状態(31)を検出する走行状態検出手段(30)と、少なくとも前記現在位置近傍を含み、前記車両の走行に関わる前記道路の情報が取得されたもしくは記憶された道路情報確認手段(20)と、前記撮像された画像を選択する画像選択手段(40)と、前記選択された画像を表示する表示手段(50)と、を備え、前記画像選択手段(40)は、前記車両が前記現在位置から前記道路情報確認手段(20)によって前記走行状態(31)の変化が予想される変化予想地点へ移動しようとするときに予想される前記走行状態(31)の変化に応じて画像を自動選択する構成とした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両周辺の視覚支援装置に係り、詳しくは、車両を走行中に乗員が視認を必要とする車両周辺の画像を表示する装置に関する。
【背景技術】
【0002】
車両が左折する交差点にさしかかると、車両を運転している乗員は、助手席側のドアミラーを用いて車両の進行方向左側方やバックミラーを用いて左側後方を視認する。
【0003】
しかし、ドアミラーやバックミラーだけでは、車両の後方もしくは後側方の視野範囲は限定される。さらに、乗員が車室内の中央前方かつ上方に配設されたバックミラーと左右のフロントドアに配設されたドアミラーを見るためには、視線の方向を大きく変えなければならず、慎重な行動が必要であった。
【0004】
そこで、視野範囲を広くし、かつ、視線を大きく動かさずにすむように、車両の後方もしくは後側方をカメラ等の撮影手段で撮影し、例えば、方向指示器の操作や、ブレーキ作動等をトリガーとして、撮影した画像を車室内のディスプレイに表示させる技術が開発されている(例えば特許文献1参照)。
【特許文献1】特許第4059078号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
運転する乗員の視認の仕方は多様であり、視認する位置やタイミングはそれぞれ異なる。乗員の運転フィーリングを大切にすることが安全な運転につながることは当然であり、乗員の個性や経験に合った視認の仕方も尊重する必要がある。
【0006】
しかしながら、従来技術は乗員の視認の仕方を一般化しており、個性や経験を生かす構成とはなっていなかった(例えば、特許文献1)。
【0007】
本発明は、車両の走行状態と道路情報を関連づけた情報として蓄積し、かかる情報に基づいて、乗員が視認したい車両周辺の画像を選択して、表示する車両周辺の視覚支援装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明にかかる一実施形態は、車載された車両の視覚支援装置であって、車両の周辺を撮像する複数の撮像手段と、道路を走行している車両の、少なくとも現在位置および時刻を含む走行状態を検出する走行状態検出手段と、少なくとも現在位置近傍を含み、車両の走行に関わる道路の情報が取得された、もしくは記憶された道路情報確認手段と、撮像された画像を選択する画像選択手段と、前記選択された画像を表示する表示手段と、を備える。
【0009】
そして、画像選択手段は、車両が現在位置から道路情報確認手段によって走行状態の変化が予想される変化予想地点へ移動しようとするときに、予想される前記走行状態の変化に応じて画像を自動選択するように構成されている。
【0010】
かかる構成は、車速の変化、方向指示器の操作、シフトチェンジ、ハザードランプの点灯、アクセル操作、およびブレーキ操作の機器操作等の走行状態の変化と、この走行状態が変化したときの位置情報等の道路情報と、を関連づけ、ここを変化予想地点とすることにより、予め乗員が必要とする車両周辺の画像を自動選択して表示させることができる。
【0011】
本発明によれば、車両を運転する乗員の嗜好や経験等を反映した車両の視覚支援装置を提供することができる。
【発明を実施するための最良の形態】
【0012】
[第1実施形態]
以下、本発明の第1実施形態について、図面を参照して説明する。図1は本実施形態にかかる車両の視覚支援装置の全体構成のブロック図である。
【0013】
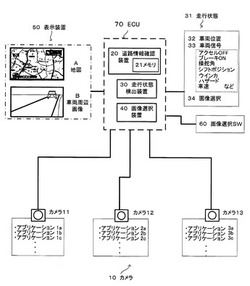
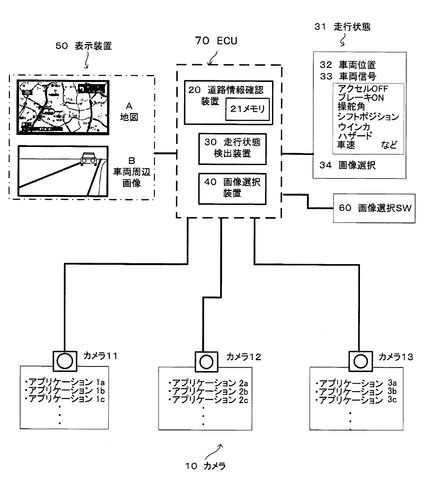
本実施形態に係る視覚支援装置は、図1に示すように、自車の周辺を撮影する複数のカメラ(撮影手段)10(11,12,13)と、車両が走行する道路の情報を有する道路情報確認装置(道路情報確認手段)20と、車両位置32や車両信号33等の車両の走行状態31を検出する走行状態検出装置(走行状態検出手段)30と、撮影された画像を選択する画像選択装置(画像選択手段)40と、選択された画像を表示する表示装置50と、乗員が画像を手動で切り替えることができるようにする画像選択SW(画像選択スイッチ)60と、を備えている。
【0014】
カメラ10は、通常の可視光用のカメラを使用することができ、たとえば、CMOSカメラおよびCCDカメラを適用することができる。一つのカメラの視野範囲を広げて台数を減らすために、広角レンズや魚眼レンズ等を使用しても良い。カメラ10(11,12,13)は、たとえば左右のドアミラーの下部とリアの中央に配設することができる。かかる構成では、左右のドアミラー下部のカメラを回動可能に装着する、もしくは前記したように魚眼レンズを適用すれば、乗員が視認し難い助手席側の左側方を含め、車両の周辺のほとんどを撮影範囲とすることができる。
【0015】
道路情報確認装置20は、少なくとも位置情報と関連づけられた道路情報を取得する、もしくは、この道路情報をメモリ21に記憶して蓄積している。ここで、道路情報は、車両が走行したことがあるという記録、左折した記録、停車した記録等の過去の走行状態を記録したものでもよいし、車両がカーナビゲーションシステム(以下、「カーナビ」という)を備え、カーナビによって道路情報を取得してもよい。また、道路情報と関連づけされる位置情報は、後記する走行状態検出装置30の検出量の一つである車両位置32と同じであり、GPSによって取得され、必要に応じて過去の走行状態31の記録とともにメモリ21に記憶して蓄積される。
【0016】
走行状態検出装置30は、走行状態31を検出する。走行状態31は、少なくとも経度・緯度で表される車両位置32を含んでおり、必要に応じて車両信号33を構成する、アクセルの操作、ブレーキの操作、ステアリングの操舵角、シフトポジション、方向指示器(ウィンカ)の操作、ハザードの操作、車速などを含むようにしている。さらに、後記する画像選択SW60によって選択された手動選択画像を含むようにしてもよい。検出された走行状態31は、道路情報確認装置20のメモリ21に記憶され、また後記する画像選択装置40の画像の自動選択に使われる。
【0017】
画像選択装置40は、走行状態検出結果と道路情報とから、走行予定の経由地や目的地において走行状態の変化が予想されるとき、予想される走行状態の変化に応じて乗員の視認を支援する画像を自動選択する。
【0018】
たとえば、車両が所定位置において左折を行い、このとき左側方の画像を乗員が選択する頻度が高いという道路情報がメモリ21に蓄積されている場合、車両が所定位置に向かって走行しており、所定位置に近づいている走行状態が走行状態検出装置30によって検出されたならば、画像選択装置40は、所定位置に到達する前に左側方のカメラ10で撮影された画像を自動選択する。なお、画像選択には様々な局面があり、実施例として後に詳述する。
【0019】
表示装置50は、画像を表示できれば特に限定されず、カーナビのディスプレイや、オーディオやエアコンなどの車内装備された機器のモニタ用ディスプレイ等を適用することができる。表示装置50は、図1に示すように、通常、Aの地図もしくは図示していないが機器のモニタなどを表示しており、画像選択装置40が画像を自動選択したときや、画像選択SW60によって乗員が画像を選択したときにBの車両周辺の画像を表示する。表示の形態は、全画面をAの地図等やBの周辺画像とするアプリケーションを選択するようにしてもよいし、二つの画面を同時に表示させるアプリケーションを選択するようにしてもよい。カメラ11,12,13のアプリケーション1a,1b・・は、前記した選択される表示形態の種類を示している。
【0020】
なお、図1および以後のいくつかの図において、アプリケーション1a,1b・・は、それぞれのカメラ11,12,13に対応したものとして図示しているが、ECU70に備えられた中央処理装置(CPU)等にアプリケーション1a,1b・・が格納され、乗員の要求に応じて、切替スイッチ等により選択される仕様やカメラ自体にアプリケーション1a,1b・・を備えている仕様でもよい。
【0021】
画像選択SW60は、乗員が手動で画像を選択するための手段である。手動選択の結果は、走行状態検出装置30によって検出されるようにしてもよい。また画像選択SW60は、後記するキャンセルのためのスイッチとして兼用してもよい。また画像選択SW60を新たに設けることなく、カーナビの画像選択スイッチ等を兼用してもよい。
【0022】
前記した道路情報確認装置20、走行状態検出装置30および画像選択装置40は、図1に示すように、統合されてECU(電子制御装置)70を構成するようにしてもよい。たとえば、カーナビを搭載している車両において、カーナビにそれぞれの装置の機能の一部を担わせることができれば、不足する機能を補う装置を付加する構成としてもよい。
【0023】
以下第1実施形態にかかる実施例を数例説明する。第1実施形態は、地図情報を有しており、表示装置50に地図が表示されているが、目的地への誘導手段を使用していない実施例である。
【0024】
たとえば、乗員が通勤に車両を使用しており、自宅から勤務している会社へ車両を走行させる場合や、最寄りの駅に行く場合や、乗員の子供を学校へ送る場合などが該当する。このような場合、カーナビを装備した車両であっても、乗員は誘導手段を使用することなく、車両を走行させる。そして、カーナビのディスプレイ(表示装置50)には、車両の現在位置とその近傍の地図が表示されていることが多い。
【0025】
[実施例1−1]
図を参照して、実施例1−1について説明する。図2は走行状態31をメモリ21に記憶する手順を表すフロー図であり、図3は本実施例で画像選択装置40が画像を自動選択する手順の一般的なフロー図であり、図4は左折する交差点を対象とした場合の画像自動選択の実施例のフロー図であり、図5は表示されるアプリケーションの実施例を示す模式図である。以下の説明では、図1もあわせて参照する。
【0026】
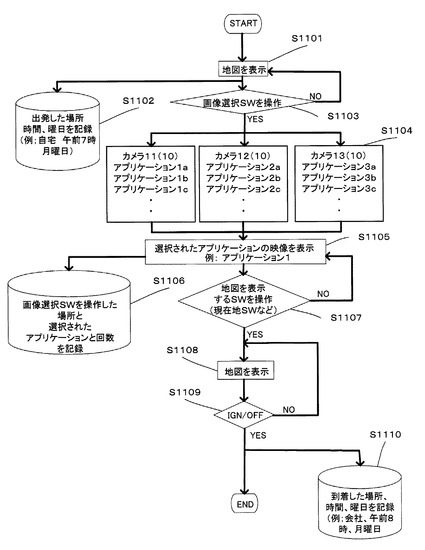
乗員が車両に搭乗し、イグニッションスイッチ(IGN)をONすることにより、車両に搭載された機器に電力が供給される。図2に示すように、表示装置50には車両の現在位置とその近傍の地図が表示される(ステップS1101)。車両が発進すると、走行状態検出装置30は、出発した場所、時間、曜日等を検出し、検出結果はメモリ21に記録される(ステップS1102)。
【0027】
乗員が画像選択SW60を操作し(ステップS1103:YES)、いずれかのカメラ11,12,13の画像とそのアプリケーション1a、1b・・が選択される(ステップS1104)。
【0028】
画像選択装置40は、手動選択されたアプリケーションにしたがい手動選択画像を表示装置50に表示する(ステップ1105)。走行状態検出装置30は、画像が選択された場所とそのアプリケーションをメモリ21に記録し、同じ選択がなされた回数もカウントして記録する(ステップS1106)。
【0029】
表示装置50に手動選択された画像が表示された後、乗員が表示をカーナビの現在地スイッチ等を操作することよって地図情報に切り替えた場合(ステップS1107:YES)、表示装置50には地図情報が表示される(ステップS1108)。
【0030】
IGNがOFFとなり、車両に搭載された機器への電力の供給が停止したとき(ステップS1109:YES)、走行状態検出装置30は、到着した場所、時間、曜日等を検出し、検出結果はメモリ21に記録される(ステップS1110)。
【0031】
以上のように本実施例にかかる視覚支援装置は、初めに走行状態を記録し、その記録を蓄積する。出発した場所、到着した場所、それらの時間帯や曜日等の走行状態の記録が同じであって、高い頻度で記録されている場合、視覚支援装置は、出発場所、時間、曜日を走行状態検出装置30によって検出することにより、到着場所と経路を推定する(経路推定手段)。この経路推定は、ECU70の機能として構成することができ、カーナビの機能と協働すれば、到着場所を手動で選択しない誘導手段とすることもできる。
【0032】
前記した経路推定が確立した後、図3に示すように、本実施例にかかる視覚支援装置の画像選択装置40は、車両が現在位置から道路情報確認装置20によって走行状態の変化が予想される変化予想地点へ移動しようとするときに、予想される走行状態の変化に応じて画像を自動選択することができる。
【0033】
ここでいう変化予想地点とは、図2のステップ1106で記録された場所が相当する。
【0034】
以下、図3を参照して画像自動選択の流れを説明する。
【0035】
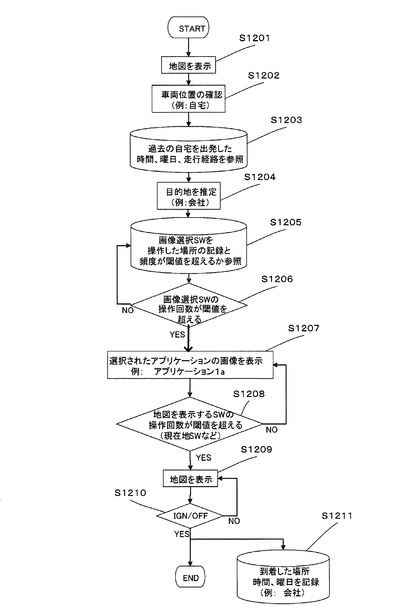
乗員が車両に搭乗し、イグニッションスイッチ(IGN)をONすることにより、車両に搭載された機器に電力が供給される。図3に示すように、表示装置50には車両の現在位置とその近傍の地図が表示される(ステップS1201)。走行状態検出装置30は、車両の位置(たとえば自宅)、時間、曜日等を検出する(ステップS1202)。検出した結果は、画像選択装置40に送られる。
【0036】
画像選択装置40は、道路情報確認装置20のメモリ21に蓄積された情報である、過去の自宅を出発した時間、曜日、走行経路を参照する(ステップS1203)。頻度が高い情報の記録が存在する場合、目的地(たとえば会社)を推定し、その経路を推定する(ステップS1204)。
【0037】
画像選択装置40は、推定された経路において、メモリ21に蓄積された画像選択SW60を操作した場所の記録(図2で説明したステップS1106)と選択した頻度が所定の閾値を超えるか否かを参照する(ステップS1205)。画像選択SW60の操作回数が閾値を超えている場合(ステップS1206:YES)、画像選択装置40は、過去に選択された画像と、過去に選択されたアプリケーションと、を自動選択し、表示装置50に表示する(ステップS1207)。
【0038】
自動選択された画像が表示装置50に表示された後に、乗員がカーナビの現在地スイッチ等を操作し、その操作回数が閾値を超える場合(ステップS1208:YES)、表示装置50には再び地図が表示される(ステップS1209)。
【0039】
IGNがOFFとなり、車両に搭載された機器への電力の供給が停止したとき(ステップS1210:YES)、走行状態検出装置30は、到着した場所、時間、曜日等を検出し、検出結果はメモリ21に記録される(ステップS1211)。
【0040】
以上のように、本実施例にかかる視覚支援装置は、前記したように経路を推定し、過去の記録を参照しつつ、車両が現在位置から、乗員によって頻繁に画像の選択操作がされていた変化予想地点へ移動しようとするときに、画像を自動選択することができる。
【0041】
運転の際の視認の場所やタイミングは、乗員の技量や経験等、または運転される車両の車体形状等によって、大きく異なる。本実施例は、乗員の過去の運転状況に基づき、画像を自動選択することにより、好適な視覚支援を実現させている。さらにステップS1211に示すように、走行状態検知結果を蓄積することにより、精度の高い経路推定と、画像の自動選択を実現させている。
【0042】
次に図4を参照して、変化予想地点の具体例を説明する。
【0043】
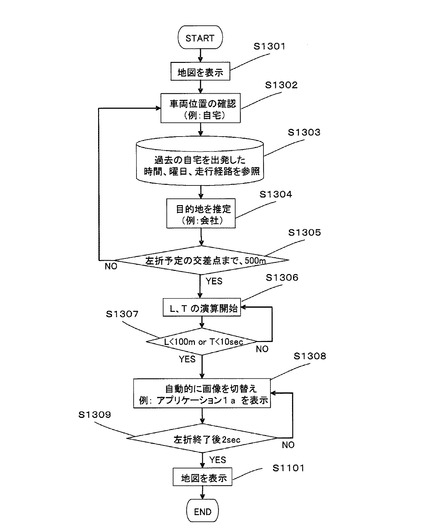
「地図の表示」(ステップS1301)、「車両位置の確認(例:自宅)」(ステップS1302)、「過去の自宅を出発した時間、曜日、走行経路を参照」(ステップS1303)および「目的地を推定(例:会社)」(ステップS1304)は、図3で説明したステップS1201〜1204と同じであるので説明を省略する。
【0044】
本実施例では、推定された経路に左折する交差点が存在している。画像選択装置40は、走行状態検出装置30によって検出された結果と道路情報確認装置20のメモリ21に蓄積された交差点の位置情報を参照しつつ、交差点までの距離を推定する。そして、交差点までの距離が、所定距離(図では500m)以上であれば(ステップS1305:NO)、引き続き走行状態の検出、経路推定(ステップ1302〜1304)を行う。交差点までの距離が、所定距離未満であれば(ステップS1305:YES)、交差点までの距離であるLと交差点に到達が予定される時間であるTを演算する(ステップS1306)。ここでTは、距離Lを走行状態検出装置30によって検出された車両信号33の一つである車速で除することで演算することができる。
【0045】
本実施例は、乗員の運転感覚を考慮して、交差点までの距離もしくは交差点に到達するまでの時間のいずれかが所定の値未満となった場合(ステップS1307:YES)に、画像選択装置40が画像を自動選択して、表示装置50に表示させる構成としている(ステップS1308)。
【0046】
図4では、距離Lが100m未満もしくは時間Tが10秒未満という条件としている(ステップS1307)。この条件を満たさない場合(ステップS1307:NO)、再度L,Tを演算する(ステップS1306)。
【0047】
選択される画像は、過去の車両の走行状態に基づくものであり、たとえば、乗員が常時、左折時の内輪差を視認している場合には、車両の左側方(助手席側)の画像が自動選択される。
【0048】
選択された画像は、左折が終了して所定時間(図では2秒)経過後に(ステップS1309:YES)、地図表示に切り替えられる構成としている(ステップS1310)。
【0049】
かかる構成によって、乗員が視認を必要とするときに、必要な画像を表示することができる。
【0050】
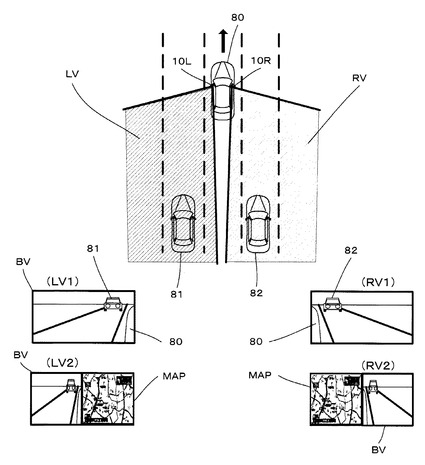
図5は、表示される画像の一例である。車両80が片側に複数の車線(図5では3車線)を有する道路を矢印方向に走行している。車両80の左右のドアミラー(図示せず)の下部にはカメラ10L,10Rが配設されており、カメラ10Lは視野LVを、カメラ10Rは視野RVを撮影することができる。車両80の後方であって、走行方向に向かって左側の車線を他車81が、右側の車線を他車82が走行しているとき、カメラ10Lが撮影する後方画像BVはLV1のように表示され、カメラ10Rが撮影する後方画像BVはRV1のように表示される。表示の形態は図1に示すそれぞれのカメラ10のアプリケーション1a、・・を選択することによって変更され、たとえばLV2やRV2のように、画面の中央に境界を設け、地図情報MAPと後方画像BVの2画面表示とすることもできる。
【0051】
たとえば、高速道路を走行中の車両80が、高速道路から退出する場合など、現在地近傍の地図情報MAPと後方を走行する他車81の情報である後方画像BVを並行して表示させることによって、乗員は、車線変更のための他の車線の状況と、高速道路退出後の情報と、をあわせて確認することができる。
【0052】
[実施例1−2]
次に本実施形態の変形例の一つについて図面を参照して説明する。なお、前記した実施例と共通する構成については省略し、差異のある部分を中心に説明する。図6は、図4で説明した状況と同様の左折する交差点を対象とした場合の画像自動選択の例のフロー図である。
【0053】
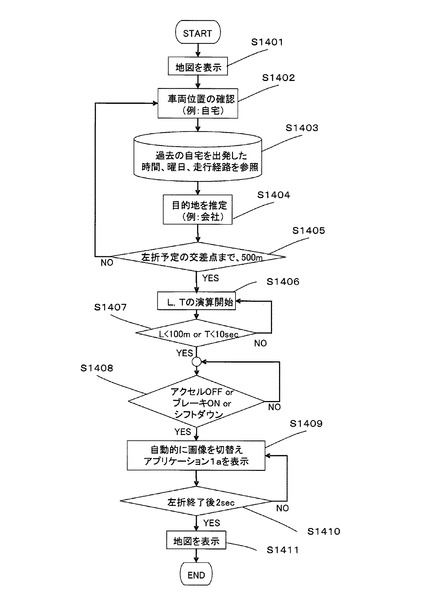
ステップS1401〜S1407とステップS1410〜S1411は、図4のステップS1301〜S1307とステップS1309〜S1310と同じであるため、説明を省略する。
【0054】
車両が交差点に近づき、ステップS1407がYESとなると、乗員は左折する前の準備として、方向指示器(ウィンカ)の操作、シフトチェンジ(ダウン)、アクセルから足を外す(アクセルOFF)、ブレーキを操作する(ブレーキON)等の機器を操作することが予想される。
【0055】
画像選択装置40は、たとえば、これらの機器操作(アクセルOFF,ブレーキON,シフトダウン)のいずれかが行われたとき(ステップS1408:YES)、メモリ21に蓄積された情報に基づき、該当する画像とそのアプリケーションを自動選択する。そして、表示装置50に画像を表示する(ステップS1409)。
【0056】
かかる構成は、車両の走行状態の変化を確実に予想することができ、もし、通常は左折している交差点を直進する場合に画像が自動選択されて表示されることを防止することができる。
【0057】
[実施例1−3]
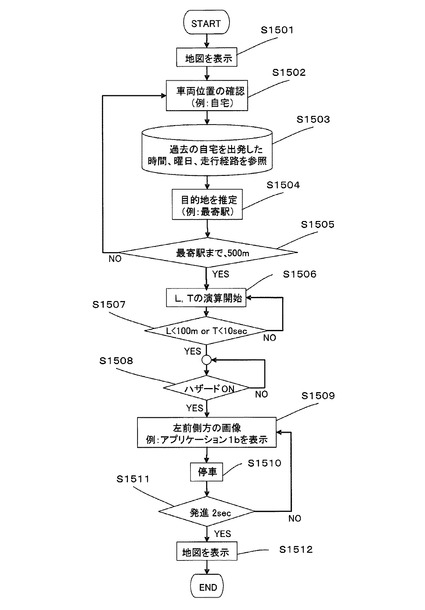
次に本実施形態の他の変形例の一つについて図面を参照して説明する。なお、前記した実施例と共通する構成については省略し、差異のある部分を中心に説明する。図7は、図4で説明した状況と類似しているが、目的地を最寄り駅として、この最寄り駅で停車させる場合を対象とした場合の画像自動選択の例のフロー図である。
【0058】
ステップS1501〜S1507は、図4のステップS1301〜S1307と目的地が最寄り駅であること、画像選択のタイミングをこの最寄り駅としていること以外は同じであるため、説明を省略する。
【0059】
車両が最寄り駅に近づき、ステップS1507がYESとなると、乗員は駅構内に停車する前の準備として、ハザードランプを操作(ハザードON)すると予想される。
【0060】
画像選択装置40は、たとえば、ハザードランプが操作(ハザードON)されたとき(ステップS1508:YES)、メモリ21に蓄積された情報に基づき、該当する画像とそのアプリケーションを自動選択する。たとえば、最寄り駅の構内に停車する際は、通常、車両を左側に寄せ、乗員は左前側方を撮影した画像を選択している場合(アプリケーション1bとする)が多いと推定され、左前側方の画像が自動選択される。そして、表示装置50に画像が表示される(ステップS1509)。
【0061】
車両が停車している間は、その後の発進時に視認を必要とする左前側方の画像の表示が維持される(ステップS1510)。車両が発進して所定時間(図では2秒)経過すれば(ステップS1511:YES)、車両は通常の走行に移行するため、表示装置50には地図情報が表示される(ステップS1512)。
【0062】
かかる構成は、乗員の走行状態の記録を基に、駅構内での停止、発進等の特殊な運転状況に応じた画像を自動選択して表示させることができる。
【0063】
[実施例1−4]
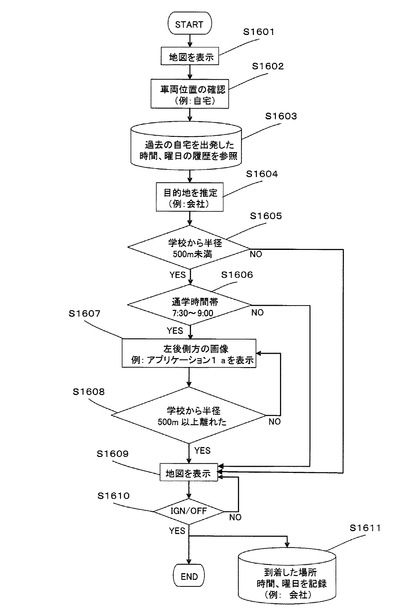
次に本実施形態の他の変形例の一つについて図面を参照して説明する。なお、前記した実施例と共通する構成については省略し、差異のある部分を中心に説明する。図8は、図4で説明した状況と類似しているが、経由地を学校として、この学校近傍の道路を走行させる場合を対象とした場合の画像自動選択の例のフロー図である。
【0064】
ステップS1601〜S1604は、図4のステップS1301〜S1304と同じであるため、説明を省略する。
【0065】
前記したように、カーナビの誘導手段を使用しない場合であっても、本実施形態にかかる視覚支援装置は、車両が出発すると、蓄積された情報に基づいて、到着点と経路とを推定する。推定された経路は、学校の近傍を経由する場合があり得る。学校には、始業時間、終業時間があり、特定の時間帯に児童生徒が学校の近傍の道路を通学歩行等する、いわゆる通学時間帯が学校近傍の道路に設定される場合が多い。通学時間帯に学校近傍の道路を走行する際には、乗員は、安全確認のため、徐行運転をするとともに、特に車両の周囲を視認することが必要となる。一方、一般的に通学時間帯は平日に限定される。
【0066】
画像選択装置40は、経由地である学校の近傍に到達したとき(ステップS1605:YES)、時刻を参照する。そして、時刻が通学時間帯(たとえば、午前7時半から午前9時)であり、かつ曜日が通学日(たとえば、平日)であれば(ステップS1606:YES)、メモリ21に蓄積された情報に基づき、該当する画像とそのアプリケーションを自動選択する。たとえば、学校近傍の歩道のない道路を走行する際は、児童生徒が歩行する道路の左後側方を撮影した画像を選択している場合(アプリケーション1aとする)が多いと推定され、左後側方の画像が自動選択される。そして、表示装置50に画像が表示される(ステップS1607)。
【0067】
車両が学校近傍を通過し、所定距離(たとえば、学校から半径500m)離れると(ステップS1608:YES)、車両は通常の走行に移行するため、表示装置50には地図情報が表示される(ステップS1609)。
【0068】
IGNがOFFとなり、車両に搭載された機器への電力の供給が停止したとき(ステップS1610:YES)、走行状態検出装置30は、到着した場所、時間、曜日等を検出し、この学校近傍を走行したときの走行状態31の検出結果はメモリ21に記録される(ステップS1611)。
【0069】
かかる構成は、学校という経由地の特性(時刻、曜日、場所等)を鑑みて、乗員の走行状態の記録を基に、特殊な運転状況に応じた画像を自動選択して表示することができる。
【0070】
[実施例1−5]
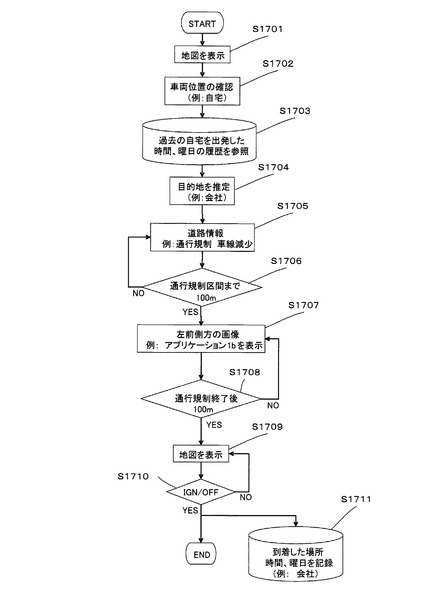
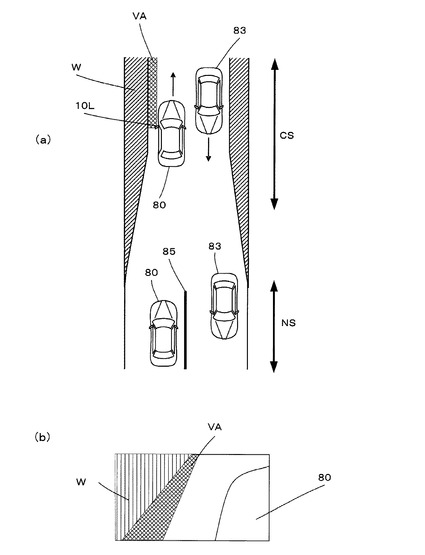
次に本実施形態の他の変形例の一つについて図面を参照して説明する。なお、前記した実施例と共通する構成については省略し、差異のある部分を中心に説明する。図9は、図4で説明した状況と類似しているが、経由地に通行規制や車線減少の区間があり、この区間を走行させる場合を対象とした場合の画像自動選択の例のフロー図であり、図10は通行規制された道路を走行する車両を俯瞰した平面図と選択された画像の一例を示している。
【0071】
ステップS1701〜S1704は、図4のステップS1301〜S1304と同じであるため、説明を省略する。
【0072】
前記したように、カーナビの誘導手段を使用しない場合であっても、本実施形態にかかる視覚支援装置は、車両が出発すると、蓄積された情報に基づいて、到着点と経路とを推定する。推定された経路は、通行規制や車線減少の区間を経由する場合があり得る。
【0073】
通行規制や車線減少の区間は、道路工事や交通事故などに依存して時々刻々と変わる場合、時間帯によって定常的に変更が設定される場合、元々の道路の形態である場合等、区間設定の理由は様々である。
【0074】
したがってかかる区間に関連する情報は、道路交通情報通信システム(VICS)からの情報や、後記するテレマティクスによる他車からの情報や、メモリ21に蓄積された情報が該当し、いずれの情報を参照してもよい。以下は、通行規制を例として説明する。
【0075】
図10に示す通行規制区間CSの一例は、片側1車線であって中央に車線を仕切る線85が引かれた道路の通常区間NSが、工事のための壁W等が設置されることにより、道路の全幅が狭くなり、仕切る線85も消失させているものである。
【0076】
車両80は、対向車両83と交差して、通行規制区間CSを通過する必要があり、乗員は車両80を道路の左端に寄せつつ、走行しなければならない。乗員は、走行に当たって、壁Wと車両80との距離はもとより、車両80と壁Wとの間の領域VAに障害物が存在しないか十分に注意する必要がある。
【0077】
推定された経路において通行規制区間を経由する情報が、前記したように、道路交通情報通信システム(VICS)からの情報や、後記するテレマティクスによる他車からの情報や、メモリ21に蓄積された情報等によって取得されると(ステップS1705)、かかる通行規制区間までの距離が逐次検出される。そして、画像選択装置40は、通行規制区間までの距離が所定距離(図では100m)未満となったとき(ステップS1706:YES)、メモリ21に蓄積された情報に基づき、該当する画像とそのアプリケーションを自動選択する。たとえば、図10に示す車両80の左前側方の領域VA(アプリケーション1bとする)の画像が自動選択される。そして、表示装置50に画像が表示される(ステップS1707)。
【0078】
通行規制区間の走行が終了して、所定距離(図では100m)を過ぎると(ステップS1708:YES)、車両は通常の走行に移行するため、表示装置50には地図情報が表示される(ステップS1709)。
【0079】
IGNがOFFとなり、車両に搭載された機器への電力の供給が停止したとき(ステップS1710:YES)、走行状態検出装置30は、到着した場所、時間、曜日等を検出し、この通行規制区間近傍を走行したときの走行状態31の検出結果はメモリ21に記録される(ステップS1711)。
【0080】
なお、通行規制は区間とともに時間帯によって行われる場合もある。したがって、通行規制時間帯に関する情報が取得されれば、車両80が走行している時間もステップS1706と同様の条件判断を時間帯に関して行えることは言うまでもない。
【0081】
かかる構成は、通行規制区間という経由地の特性(時刻、曜日、場所等)を鑑みて、乗員の走行状態の記録を基に、特殊な運転状況に応じた画像を自動選択して表示することができる。
【0082】
[第2実施形態]
次に、本発明の第2実施形態について図面を参照して説明する。なお、第1実施形態と重複する部分については省略し、差異のある部分を中心に説明する。
【0083】
本実施形態は、カーナビを使用して目的地まで誘導されるものであり、過去の走行状態の記録から到着点までの経路を推定する第1実施形態と異なる。すなわち、図1に示す構成にカーナビが標準的に備える地図情報が記憶された地図情報記憶部(図示せず)と、この地図情報によって車両を出発点から指定された到着点への誘導経路に誘導する誘導部(図示せず)と、を加えた構成となっている。
【0084】
以下、第2実施形態にかかる実施例を数例紹介する。
【0085】
[実施例2−1]
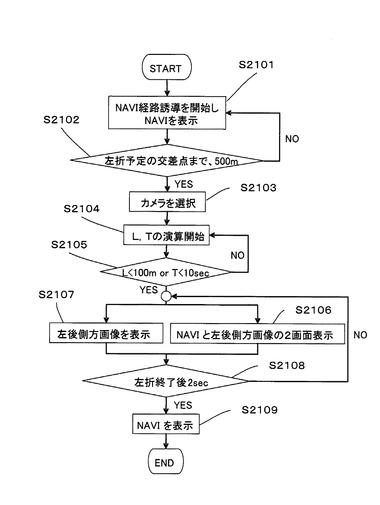
図1および図11を参照して、実施例2−1について説明する。図11は、本実施例で画像選択装置40が画像を自動選択する手順のフロー図であり、左折する交差点を対象としている。なお、図11の「NAVI」は、カーナビという機器に加えて、カーナビによる経路誘導、誘導する経路に関連する情報を含めた意味で使用している。
【0086】
図11は、第1実施形態の代表的な実施例である図4と比較すると分かるように、図4のステップS1301〜S1304の手順は、既にカーナビが誘導経路を設定しているため必要ない。
【0087】
本実施例では、誘導経路に左折する交差点が存在している。画像選択装置40は、カーナビの交差点の位置情報を参照しつつ、交差点までの距離を推定する。そして、交差点までの距離が、所定距離(図では500m)以上であれば(ステップS2102:NO)、引き続き経路誘導(ステップS2101)を行う。交差点までの距離が、所定距離(図では500m)未満であれば(ステップS2102:YES)、左折時に視認が必要な視野をカバーする左後側方のカメラを予め選択しておく(ステップS2103)。
【0088】
交差点までの距離であるLと交差点に到達が予定される時間であるTを演算する(ステップS2104)。ここでTは、距離Lを走行状態検出装置30によって検出された車両信号33の一つである車速で除することで演算することができる。
【0089】
本実施例は、実施例1−1(図4)と同様に、乗員の運転感覚を考慮して、交差点までの距離もしくは交差点に到達するまでの時間のいずれかが所定の値未満となった場合(ステップS2105:YES)に、画像選択装置40が画像を自動選択して、表示装置50に表示させる構成としている(ステップS2106またはS2107)。
【0090】
図11では、距離Lが100m未満もしくは時間Tが10秒未満という条件としている(ステップS2105)。この条件を満たさない場合(ステップS2105:NO)、再度L,Tを演算する(ステップS2104)。
【0091】
選択される画像は、左折時には路肩を走行する自転車や左折の内輪差を視認することが多く、車両の左後側方(助手席側)の画像が自動選択される。自動選択された画像は、表示装置50に表示されるが、図5の画面例のように、カーナビの経路誘導画面と左後側方の画像とを並んで表示させてもよいし(ステップS2106)、左後側方の画像のみを表示させてもよい(ステップS2107)。かかる選択は、乗員が任意にカーナビの画面選択スイッチ等で操作することができる。
【0092】
選択された画像は、左折が終了して所定時間(図では2秒)経過後に(ステップS2108:YES)、カーナビの経路誘導画面に切り替えられる構成としている(ステップS2109)。
【0093】
かかる構成によって、乗員が視認を必要とするときに、必要な画像を表示することができる。
【0094】
[実施例2−2]
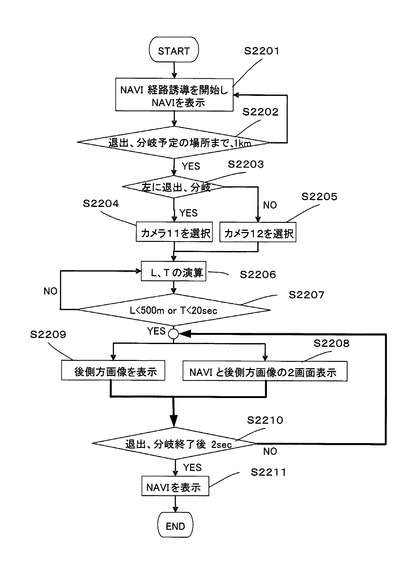
次に本実施形態の変形例の一つについて図面を参照して説明する。なお、前記した実施例と共通する構成については省略し、差異のある部分を中心に説明する。図12は、優先道路を退出、もしくは、道路の分岐を対象とした場合の画像自動選択の実施例のフロー図である。
【0095】
優先道路から退出、もしくは、道路の分岐は、左右いずれの方向もあり得る。走行している道路が、片側に複数の車線を有する道路の場合、場合によっては、車線を変更した後、退出もしくは分岐するように車両を走行させる必要がある。また、退出や分岐の直前での車線変更等は危険が伴うため、時間的および距離的にある程度余裕をもった視認行動が必要となる。
【0096】
かかる状況を鑑みて、本実施例は、カーナビによって経路誘導を開始し(ステップS2201)、経由地に優先道路から退出、もしくは、道路の分岐のような走行状態の変化が予想される変化予想地点があるときは、変化予想地点までの距離を常に監視し、所定距離(図では1km)未満となったとき(ステップS2202:YES)、退出もしくは分岐が道路の右側なのか(ステップS2203:No)、左側なのか(ステップS2203:YES)を判定する。左側の場合はカメラ11が選択され(ステップS2204)、右側の場合はカメラ12が選択される(ステップS2205)。なお、ここでは、カメラ11、12が左側か、右側か、もしくは中央か、という特定はしていないが、いずれも後方の視野を有するものとしている。道路状況によっては、中央後方の視野の方が、乗員にとって視認に貢献することがあるからである。
【0097】
変化予想地点までの距離と時間を演算し、所定距離未満もしくは到達まで所定時間未満であるか、否かを判断する手順(ステップS2206,2207)は、前記した実施例2−1と同様であるが、退出や分岐は自動車専用道路を走行時に必要な場合が多くなるため、所定距離、所定時間とも大きくなっている(図では距離は500m未満、時間は20秒未満)。
【0098】
ステップS2207がYESとなった以後の流れ(ステップS2208〜S2211)は、実施例2−1のステップS2107〜S2110と同様であるため、説明を省略する。
【0099】
このように、本実施例は、優先道路から退出、もしくは、道路の分岐という走行状態に応じて、的確に画像を自動選択して、表示させることができる。
【0100】
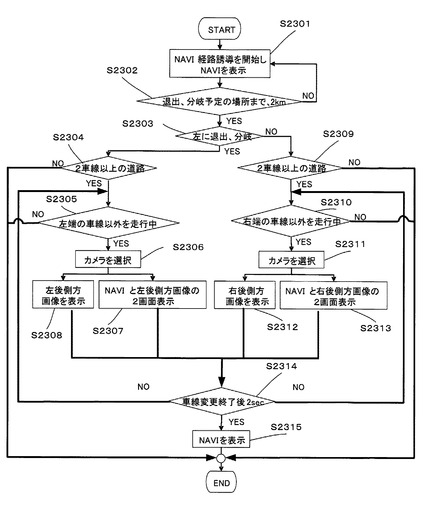
[実施例2−3]
次に本実施形態の変形例の一つについて図面を参照して説明する。なお、前記した実施例と共通する構成については省略し、差異のある部分を中心に説明する。図13は、図12で説明した状況と同様の優先道路を退出、もしくは、道路の分岐を対象とした場合の画像自動選択の例のフロー図であるが、走行車線が片側2車線以上ある道路を対象としている。
【0101】
ステップS2301〜S2303は、図12のステップ2201〜S2203と同じであるため説明を省略する。
【0102】
走行している道路が、片側に複数の車線を有する道路のとき、場合によっては、車線を変更した後、退出もしくは分岐するように車両を走行させる必要がある。
【0103】
本実施例は、左側に退出もしくは分岐する場合(ステップS2303:YES)、走行している道路が片側2車線以上あるか、否か、判定を行う。そして、片側2車線以上の道路であれば(ステップS2304:YES)、次に車両が左端の車線を走行しているか、否か、の判定(ステップS2305)を行う。車両が、左端以外の車線を走行している場合は、車線変更を行った後に、退出もしくは分岐を行う必要があるからである。
【0104】
車両が、左端以外の車線を走行している場合(ステップS2305:YES)、左後側方のカメラが選択される。変更しようとする車線を後方から他車が走行しているか、否か、を視認するためである。
【0105】
選択された画像の表示(ステップS2307,S2308、S2314,S2315)および、以後の流れについては、実施例2−2の図12のステップSS2208〜S2211と同様であるので、説明を省略する。
【0106】
右側に退出もしくは分岐する場合の流れ(ステップ2309〜S2315)については、左側に退出もしくは分岐と同様であるため説明を省略する。
【0107】
このように、本実施例は、片側に複数の走行車線を有する道路から退出、もしくは、道路の分岐という走行状態に応じて、的確に画像を自動選択して、表示させることができる。
【0108】
[実施例2−4]
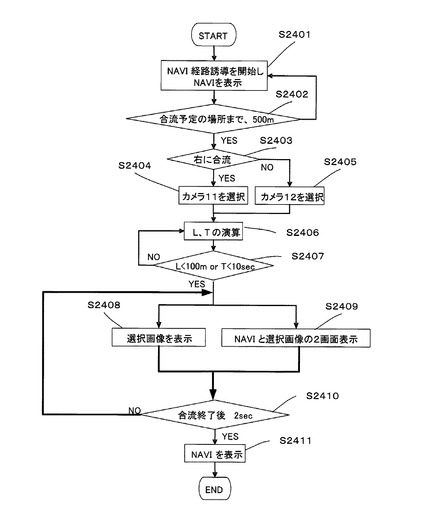
次に本実施形態の変形例の一つについて図面を参照して説明する。なお、前記した実施例と共通する構成については省略し、差異のある部分を中心に説明する。図14は、経由地に道路の合流地点が含まれる場合を対象とした画像自動選択の実施例のフロー図である。
【0109】
道路の合流は、左右いずれの方向からもあり得る。そして、自動車専用道路に進入するときなど、優先道路に合流する場合は、優先道路を走行する車両は車速が速く、合流しようとする車両は、合流をする車線における他の車両の走行状況を視認する必要がある。同様に自動車専用道路のいわゆるジャンクションなどでは、合流地点から、車線が減少する場合もあり、合流する他の車両と、自分の車両との車間距離等も視認しながら、走行しなければならない。
【0110】
かかる状況を鑑みて、本実施例は、カーナビによって経路誘導を開始され(ステップS2401)、経由地に道路の合流地点があるときは、合流地点までの距離が常に監視され、所定距離(図では500m)未満となったとき(ステップS2402:YES)、合流が道路の右側なのか(ステップS2403:YES)、左側なのか(ステップS2403:NO)を判定する。右側の場合はたとえばカメラ11が選択され(ステップS2404)、左側の場合はたとえばカメラ12が選択される(ステップS2405)。なお、ここでは、カメラ11、12が左側か、右側か、もしくは中央か、という特定はしていないが、いずれも後方の視野を有するものとしている。道路状況によっては、中央後方の視野の方が、乗員にとって視認に貢献することがあるからである。
【0111】
以後の流れ(ステップS2406〜S2411)については、実施例2−2の図12のステップS2206〜S2211と同様であるため、説明を省略する。
【0112】
このように、本実施例は、道路の合流地点を経由する場合、合流時の走行状態に応じて、的確に画像を自動選択して、表示させることができる。
【0113】
[実施例2−5]
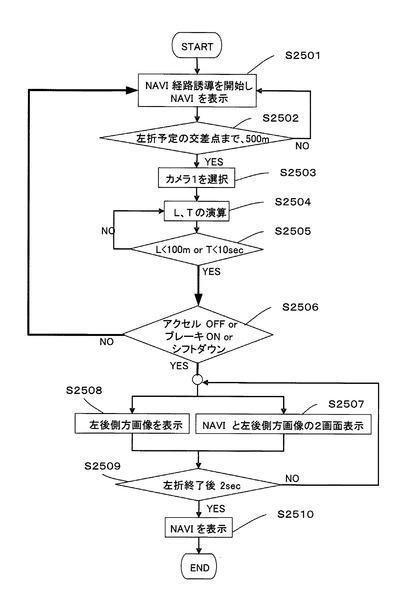
次に本実施形態の変形例の一つについて図面を参照して説明する。なお、前記した実施例と共通する構成については省略し、差異のある部分を中心に説明する。図15は、図11で説明した状況と同様の左折する交差点を対象とした場合であって、図6で説明した構成と類似した機器操作を画像自動選択のトリガーとした場合のフロー図である。
【0114】
ステップS2501〜S2505は、図11のステップS2101〜S2105と同様であるため、説明を省略する。
【0115】
車両が交差点に近づき、ステップS2505がYESとなると、乗員は左折する前の準備として、方向指示器(ウィンカ)の操作、シフトチェンジ(ダウン)、アクセルから足を外し(アクセルOFF)ブレーキを操作(ブレーキON)等の機器を操作すると予想される。
【0116】
画像選択装置40は、たとえば、これらの機器操作(アクセルOFF,ブレーキON,シフトダウン)のいずれかが行われたとき(ステップS2506:YES)、該当する画像とそのアプリケーションを自動選択する。そして、表示装置50に画像を表示する(ステップS2507,S2508)。
【0117】
かかる構成は、左折している交差点に応じた画像を自動選択することができる。
【0118】
[実施例2−6]
次に本実施形態の変形例の一つについて図面を参照して説明する。なお、前記した実施例と共通する構成については省略し、差異のある部分を中心に説明する。図16は、図15で説明した状況と同様の左折する交差点を対象とした場合のフロー図である。
【0119】
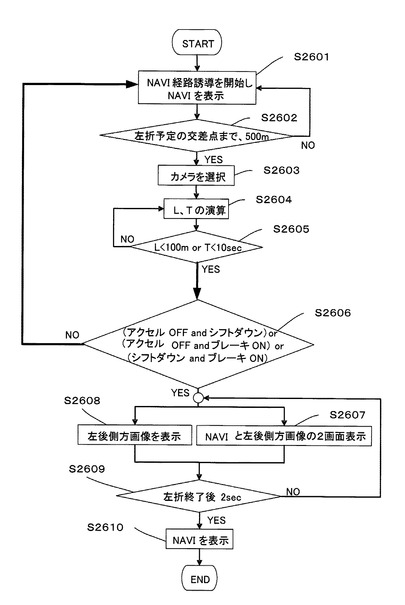
本実施例は、ステップS2606に判定に示すように、「アクセルOFFとシフトダウン」、「アクセルOFFとブレーキON」、「シフトダウンとブレーキON」のいずれかの組み合わせの一つでも該当する機器操作が行われたときに、画像が自動選択される構成としている。
【0120】
かかる構成は、実際の運転状況に即したものであり、画像を自動選択し、表示する的確なタイミングを提供することができる。
【0121】
[実施例2−7]
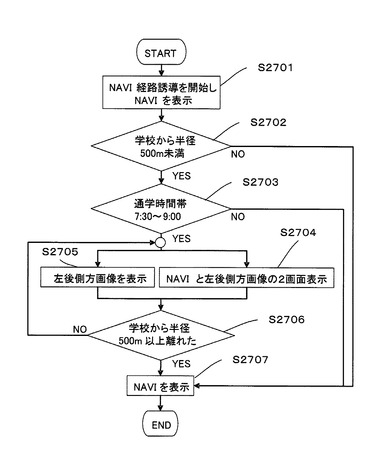
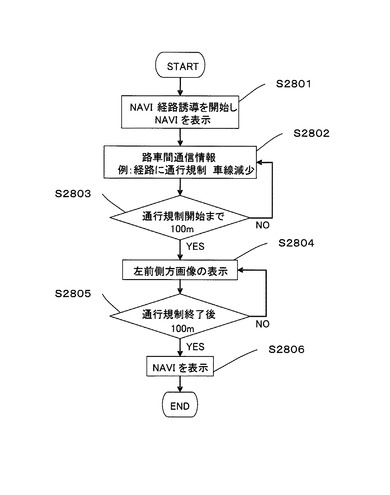
次に本実施形態の変形例の一つについて図面を参照して説明する。なお、前記した実施例と共通する構成については省略し、差異のある部分を中心に説明する。図17は実施例1−4の図8で説明した状況と同様の経由地に学校がある場合、図18は実施例1−5の図9で説明した状況と同様の経由地に通行規制区間ある場合を対象としたフロー図である。
【0122】
実施例1−4、1−5は、原則的に、過去の情報に基づきカメラとそのアプリケーションを選択している。しかしながら、本実施例は、カーナビによって設定された誘導経路の経由地に学校や通行規制区間がある場合であり、予め選択される画像の撮影方向は設定されている(S2704,S2705:左後側方、ステップS2804:左前側方)。
【0123】
なお、他の構成については、図17は図8と、図18は図9とほぼ同様であるため、説明を省略する。
【0124】
かかる構成は、普段通行していない道路を走行する場合であっても、視認を支援する画像を自動選択することができる。
【0125】
[第3実施形態]
次に、本発明の第3実施形態について図面を参照して説明する。なお、第1、第2実施形態と重複する部分については省略し、差異のある部分を中心に説明する。
【0126】
前記した第1実施形態は、地図情報を有しており、表示装置50に地図が表示されているが、目的地への誘導手段を使用していない場合の例であり、第2実施形態は、カーナビを使用して目的地まで誘導する場合の実施例であった。本実施形態は、GPS等の車両の位置を側位する装置を車載していればよく、第1実施形態も第2実施形態も、本実施形態の中に含まれる。そして、本実施形態は、第1実施形態の目的地推定とその経路推定、第2実施形態の目的地までの経路誘導は行わない。
【0127】
以下の説明では、GPS等の車両の位置を側位する装置のみ車載しており、図1の表示装置50の表示画面Aは、地図情報でもNAVI画面でもなく、たとえば、オーディオやエアコンなどの車内装備された機器のモニタを示しており、いわゆるモニタ用ディスプレイ等を適用した実施例としている。
【0128】
基本的な構成は、図1に示すとおりであり、前記のように表示装置50の表示画面Aが車載機器モニタ用ディスプレイであることが異なる。このディスプレイは、カメラ10によって撮影された画像を表示できるものであれば特に限定はされない。
【0129】
以下、第3実施形態にかかる実施例を数例紹介する。
【0130】
[実施例3−1]
図を参照して、実施例3−1について説明する。図19は本実施例で画像選択装置40が画像を自動選択する手順の一般的なフロー図である。以下の説明では、図1もあわせて参照する。
【0131】
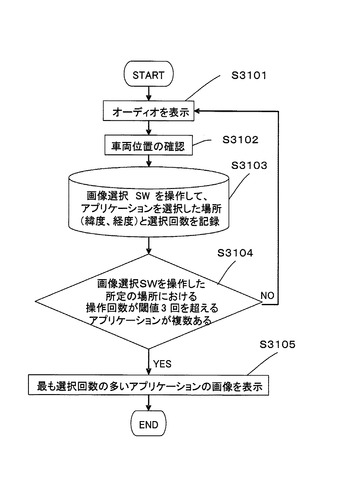
車両が走行中、表示装置50は、車載機器モニタ(図では「オーディオ」)を表示する(ステップS3101)。走行状態検出装置30は、常に車両の位置をGPS等によって側位し、確認を行っている(ステップS3102)。画像選択SW60が操作されると、この操作の内容である選択されたカメラ10とそのアプリケーション、および、操作された位置(たとえば、経度・緯度)が、道路情報確認装置20のメモリ21に記録される。メモリ21に蓄積された過去の記録が参照され、この新たな記録が過去の記録と同じであれば、選択された回数を加算し、「選択回数」として記録される(ステップS3103)。
【0132】
「選択回数」が所定回数を超えた場合(ステップS3104:YES、図では閾値3回としている)、画像選択装置40はメモリ21に蓄積された過去の記録を参照して画像を自動選択し、表示装置50にその画像が表示される(ステップS3105)。図19では閾値3回を超えるアプリケーションが複数ある場合を想定しており(ステップ3104)、最も選択回数が多いアプリケーションを選択している。もし、閾値を超えるアプリケーションが一つであれば、かかる判定は行わず、対象となるアプリケーションが選択されることは言うまでもない。
【0133】
かかる構成は、乗員が日頃の運転において、画像を手動選択することによって視認を頻繁に行っている場所を走行状態の変化が予想される変化予想地点とみなし、予め画像を自動選択するため、乗員が煩雑な作業をすることなく車両の周辺を視認することを支援することができる。
【0134】
[実施例3−2]
次に本実施形態の変形例の一つについて図面を参照して説明する。なお、前記した実施例と共通する構成については省略し、差異のある部分を中心に説明する。図20は、図19と同様な蓄積された情報に基づく画像自動選択の例のフロー図である。
【0135】
本実施形態は、画像の手動選択に関わる情報と選択された位置の情報とから構成されており、該当位置における車両の走行の変化を推定しているものでない。したがって、たとえば、通常は左折する交差点である該当する位置に車両が到達しても、日によっては直進する場合や右折する場合も想定される。かかる状況において、左折するために有用な車両の左側方を撮影した画像が自動選択され、表示されても、乗員の視覚支援とはならず、むしろ煩わしい。
【0136】
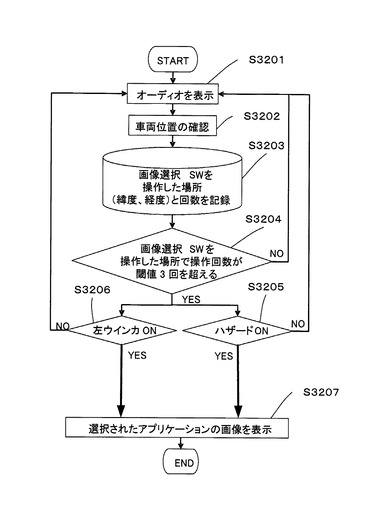
本実施例は、かかる状況を回避するものであり、実施例3−1に車両の走行に関連する機器の操作状態(車両信号33)を加え、画像自動選択の判断を的確にするものである。
【0137】
ステップS3201〜S3204は、図19のステップS3101〜S3104と同様であるが、ステップS3203において、前記したように車両の走行に関連する機器の操作状態(図では、左ウィンカONまたはハザードON)も、車両の位置と画像手動選択とともに記録される。
【0138】
そして、走行状態検出装置30によって、左ウィンカONが検出されたときは(ステップS3206:YES)、画像選択装置40は、過去の記録に基づき画像を自動選択して、表示装置50に画像を表示する(ステップS3206)。同様に、ハザードONが検出されたときは(ステップS3205:YES)、画像選択装置40は、過去の記録に基づき画像を自動選択して、表示装置50に画像を表示する(ステップS3207)。
【0139】
なお、車両信号33の情報を蓄積せずに、左ウィンカONならば左折とみなして車両の左側後方の画像を、ハザードONならば駐停車とみなして車両左側前方もしくは後方の画像を自動選択するようにしてもよい。
【0140】
かかる構成によって、本実施例は、画像自動選択の判断をより的確にすることができる。
【0141】
[実施例3−3]
次に本実施形態の変形例の一つについて図面を参照して説明する。なお、前記した実施例と共通する構成については省略し、差異のある部分を中心に説明する。図21は、乗員が登録した選択画像を自動選択する実施例のフロー図である。
【0142】
乗員が通勤に車両を使用しており、自宅から勤務している会社へ車両を走行させる場合や、最寄りの駅に行く場合や、乗員の子供を学校へ送る場合などは、車両は同じ経路を走行する。
【0143】
この経路の経由地に交差点があり、交差点を左折する場合や、目的地で車両を駐停車する場合など、乗員は決まったカメラの画像によって車両周辺を視認することが多いと想定される。
【0144】
本実施例は、かかる状況において、予め選択する画像を登録し、対象となる場所でその画像が自動選択されることにより、走行中に画像選択SW60を操作する煩わしさを回避するものである。
【0145】
実施例3−1等と同様に、本実施例においても、GPS等によって走行する車両の位置は側位されている。
【0146】
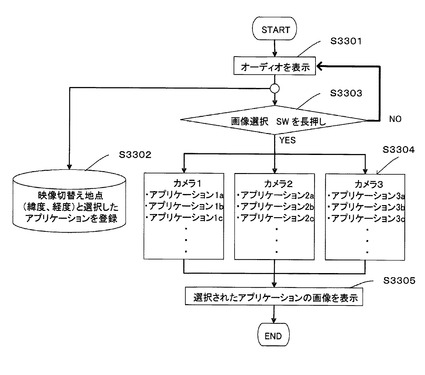
視覚支援を必要とする地点において、乗員は画像選択SW60を一定時間押し続ける(長押し、ステップS3303:YES)。長押しすることにより、選択される画像およびそのアプリケーションと車両の位置が登録される(ステップS3302)。
【0147】
図21では、単に長押しによって選択された画像およびそのアプリケーション(ステップS3304)が、表示装置50に表示されている(ステップS3305)が、次回以降の車両の走行において、該当する地点に到達すると、画像選択装置40は、登録された画像を自動選択し、表示装置50に表示させる。
【0148】
かかる構成は、日頃通行する道路において、視認を必要とする場所を経由するときに、自動で画像が選択され、表示されるため、煩わしい操作を必要としない。
【0149】
[実施例3−4]
次に本実施形態の変形例の一つについて図面を参照して説明する。なお、前記した実施例と共通する構成については省略し、差異のある部分を中心に説明する。図22は、本実施例のフロー図である。
【0150】
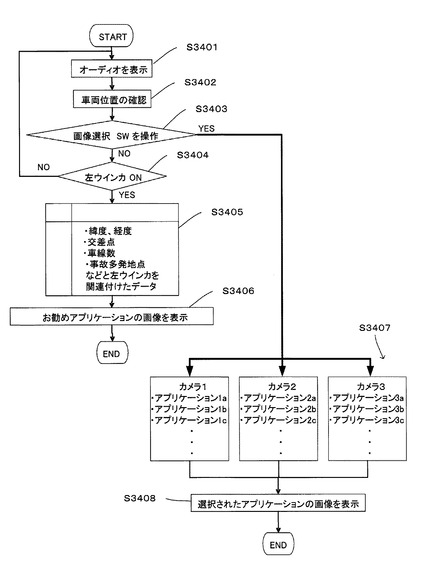
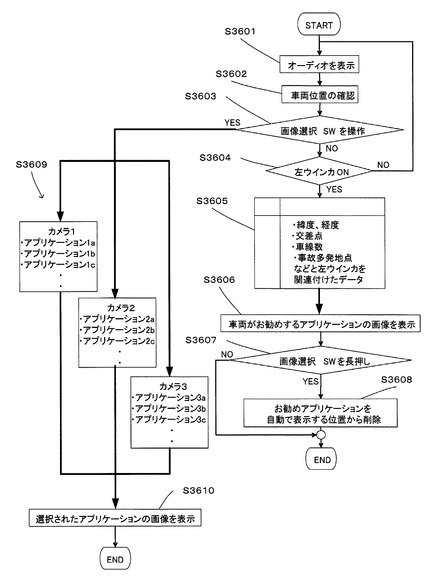
本実施例では、たとえば、メモリ21のような記憶媒体に、予め、左ウィンカON等の運転操作にかかる車両信号33と、操作される場所と、視認が必要と想定される画像とそのアプリケーション(以下「お勧めアプリケーション」という)と、を関連づけるデータベースを保存している。
【0151】
車両が走行中、表示装置50は、車載機器モニタ(図では「オーディオ」)を表示する(ステップS3401)。走行状態検出装置30は、常に車両の位置をGPS等によって側位し、確認を行っている(ステップS3402)。画像選択SW60が操作されると(ステップS3403:YES)、選択されたアプリケーション(ステップS3407)の画像が選択され、表示装置50に表示される(ステップS3408)。
【0152】
画像選択SW60が操作されない場合(ステップS3403:NO)であって、運転操作にかかる車両信号33が検出されたときは(図では、左ウィンカON、ステップS3404:YES)、前記したお勧めアプリケーションのデータベースが参照され(ステップS3405)、該当するアプリケーションがデータベースに存在する場合は、その画像が自動選択され、表示装置50に表示される(ステップS3406)。
【0153】
かかる構成によって、本実施例は、乗員が特に必要とするときは手動で画像を選択することができ、それ以外のときは画像選択装置40が、視覚支援に好適な画像を自動選択するために、煩わしい操作を回避することができる。
【0154】
[実施例3−5]
次に本実施形態の変形例の一つについて図面を参照して説明する。なお、前記した実施例と共通する構成については省略し、差異のある部分を中心に説明する。図23は、本実施例のフロー図である。
【0155】
本実施例は、実施例3−4、図22に類似した構成となっている。しかし、実施例3−4のお勧めアプリケーションは、一般化されたデータベースであり、自動選択された画像が乗員の嗜好や経験に沿ったものではないことがあり得る。
【0156】
そこで、本実施例は乗員の意思に沿わない自動選択を回避する構成を提供する。
【0157】
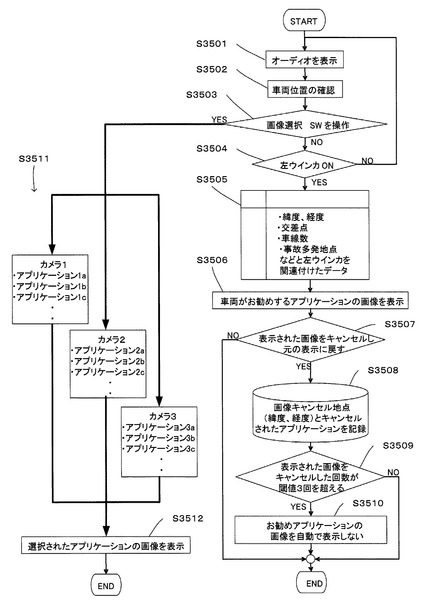
ステップS3501〜S3506と、S3511,S3512は、実施例3―4の図22と同様であるため説明を省略する。
【0158】
本実施例は、表示装置50にお勧めアプリケーションの画像が自動選択され、表示されたときに(ステップS3506)、乗員が画像選択SW60を操作する、もしくは、元の画像であるオーディオモニタに戻す、等の表示画像のキャンセル行為を監視する(ステップS3507)。
【0159】
表示画像のキャンセル行為があった場合は(ステップS3507:YES)、キャンセル地点(緯度、経度)とキャンセルされたアプリケーションが道路情報確認装置20のメモリ21に記録される(ステップS3508)。メモリ21に蓄積された過去の記録が参照され、この新たな記録が過去の記録と同じであれば、キャンセル行為の回数を加算し、「キャンセル回数」として記録される。
【0160】
「キャンセル回数」が所定回数を超えた場合(ステップS3509:YES、図では閾値3回としている)、画像選択装置40はメモリ21に蓄積された過去の記録を参照して、表示装置50にお勧めアプリケーションの画像を表示しない(ステップS3510)。
【0161】
かかる構成は、乗員の意思に沿わない自動選択を回避することができる。
【0162】
[実施例3−6]
次に本実施形態の変形例の一つについて図面を参照して説明する。なお、前記した実施例と共通する構成については省略し、差異のある部分を中心に説明する。図24は、本実施例のフロー図である。
【0163】
本実施例は、実施例3−5、図23に類似した構成となっている。実施例3−5では、お勧めアプリケーションのキャンセル回数により、お勧めアプリケーションの画像が自動選択されない構成であったが、本実施例は、データベースからこのお勧めアプリケーションを削除する。
【0164】
ステップS3601〜S3606と、S3609,S3610は、実施例3―5の図23と同様であるため説明を省略する。
【0165】
本実施例は、表示装置50にお勧めアプリケーションの画像が自動選択され、表示されたときに(ステップS3606)、乗員が画像選択SW60を操作する、もしくは、元の画像であるオーディオモニタに戻す、等の表示画像のキャンセル行為を行い、さらに所定時間以上、スイッチやボタン等を操作し続けた(図では「長押し」としている)場合に(ステップS3607:YES)、乗員は当該画像を視認しないという意思があると判断し、当該画像はお勧めアプリケーションから削除される(ステップS3608)。
【0166】
かかる構成は、乗員の意思に沿わない自動選択を回避することをできる。
【0167】
[第4実施形態]
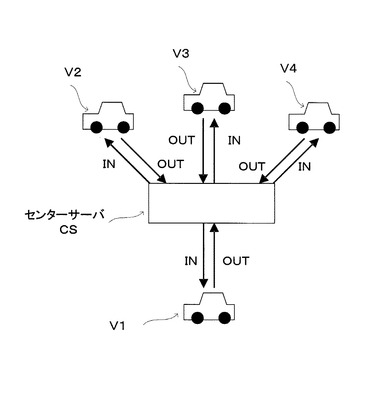
次に、本発明の第4実施形態について図面を参照して説明する。なお、前記した実施形態と重複する部分については省略し、差異のある部分を中心に説明する。図25は、本実施形態にかかる一実施例の模式的な説明図である。
【0168】
本実施形態に係る視覚支援装置は、図25に示すように、同様の視覚支援装置を備える複数の車両V1,V2,V3,V4があり、それぞれの車両V1,V2,V3,V4は通信回線によってセンターサーバCSと結ばれている環境が前提となる。
【0169】
たとえば、一の車両V1の乗員が画像を画像選択SWによって手動選択の操作をしたとき、選択された画像と操作されたときの交通状況(場所、天候、時刻、曜日、混雑状況、速度等)の情報は通信回線(テレマティクス等)によりセンターサーバCSに送信される(矢印OUT)。
【0170】
センターサーバCSは、前記した一の車両V1に加え、他の複数の車両V2,V3,V4から送信されたデータ(矢印OUT)に基づいてどのような状態もしくは状況下でどの画像が選択されたかを集計する。
【0171】
センターサーバCSは、集計結果を基に、交通状況ごとに画像やそのアプリケーションの選択頻度を算出し、この情報をそれぞれの車両V1,V2,V3,V4に送信し(矢印IN)、情報を共有する。
【0172】
そして、ある車両(たとえば、車両V2)が、所定の選択頻度を超える交通状況に遭遇した場合に、車両V2の視覚支援装置の画像選択装置40は、共有した情報に基づいて画像を自動選択し、表示装置50に表示する。
【0173】
かかる構成によって、道路交通情報通信システム(VICS)からの情報だけでは把握しきれない道路情報も共有することができ、視認が必要な場所において、的確な画像を選択し、表示させることができる。
【0174】
以上、本発明について好適な実施形態とその実施例を説明した。本発明は、図面に記載したものに限定されることなく、その趣旨を逸脱しない範囲で設計変更が可能である。
【図面の簡単な説明】
【0175】
【図1】第1実施形態にかかる車両の視覚支援装置の全体構成のブロック図である。
【図2】実施例1−1にかかる走行状態をメモリに記憶する手順を表すフロー図である。
【図3】実施例1−1にかかる画像選択装置が画像を自動選択する手順の一般的なフロー図である。
【図4】実施例1−1にかかる左折する交差点を対象とした場合の画像自動選択の例のフロー図である。
【図5】実施例1−1にかかる表示されるアプリケーションの例を示す模式図である。
【図6】実施例1−2にかかる左折する交差点を対象とした場合の画像自動選択の例のフロー図である。
【図7】実施例1−3にかかる目的地を最寄り駅として、この最寄り駅で停車させる場合を対象とした場合の画像自動選択の例のフロー図である。
【図8】実施例1−4にかかる経由地を学校として、この学校近傍の道路を走行させる場合を対象とした場合の画像自動選択の例のフロー図である。
【図9】実施例1−5にかかる経由地に通行規制や車線減少の区間があり、この区間を走行させる場合を対象とした場合の画像自動選択の例のフロー図である。
【図10】実施例1−5にかかる通行規制された道路を走行する車両を俯瞰した平面図と選択された画像の一例を示した図である。
【図11】第2実施形態の実施例2−1にかかる画像選択装置が画像を自動選択する手順のフロー図である。
【図12】実施例2−2にかかる優先道路を退出、もしくは、道路の分岐を対象とした場合の画像自動選択の例のフロー図である。
【図13】実施例2−3にかかる走行車線が片側2車線以上ある道路を対象とした優先道路を退出、もしくは、道路の分岐を対象とした場合の画像自動選択の例のフロー図である。
【図14】実施例2−4にかかる経由地に道路の合流地点が含まれる場合を対象とした画像自動選択の例のフロー図である。
【図15】実施例2−5にかかる左折する交差点を対象とした場合であって、機器操作を画像自動選択トリガーとした場合のフロー図である。
【図16】実施例2−6にかかる左折する交差点を対象とした場合のフロー図である。
【図17】実施例2−7にかかる経由地に学校がある場合を対象としたフロー図である。
【図18】実施例2−7にかかる経由地に通行規制区間ある場合を対象としたフロー図である。
【図19】実施例3−1にかかる画像選択装置が画像を自動選択する手順の一般的なフロー図である。
【図20】実施例3−2にかかる蓄積された情報に基づく画像自動選択の例のフロー図である。
【図21】実施例3−3にかかる乗員が登録した選択画像を自動選択する例のフロー図である。
【図22】実施例3−4にかかる画像選択例のフロー図である。
【図23】実施例3−5にかかる画像選択と画像キャンセル例のフロー図である。
【図24】実施例3−6にかかる画像選択とアプリケーション削除例のフロー図である。
【図25】第4実施形態にかかる一実施例の模式的な説明図である。
【符号の説明】
【0176】
10,11,12,13 カメラ
20 道路情報確認装置
21 メモリ
30 走行状態検出装置
31 走行状態
32 車両位置
33 車両信号
34 画像選択
40 画像選択装置
50 表示装置
60 画像選択SW
70 ECU
80 車両
81,82 他の車両
83 対向車両
85 仕切り線
【技術分野】
【0001】
本発明は、車両周辺の視覚支援装置に係り、詳しくは、車両を走行中に乗員が視認を必要とする車両周辺の画像を表示する装置に関する。
【背景技術】
【0002】
車両が左折する交差点にさしかかると、車両を運転している乗員は、助手席側のドアミラーを用いて車両の進行方向左側方やバックミラーを用いて左側後方を視認する。
【0003】
しかし、ドアミラーやバックミラーだけでは、車両の後方もしくは後側方の視野範囲は限定される。さらに、乗員が車室内の中央前方かつ上方に配設されたバックミラーと左右のフロントドアに配設されたドアミラーを見るためには、視線の方向を大きく変えなければならず、慎重な行動が必要であった。
【0004】
そこで、視野範囲を広くし、かつ、視線を大きく動かさずにすむように、車両の後方もしくは後側方をカメラ等の撮影手段で撮影し、例えば、方向指示器の操作や、ブレーキ作動等をトリガーとして、撮影した画像を車室内のディスプレイに表示させる技術が開発されている(例えば特許文献1参照)。
【特許文献1】特許第4059078号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
運転する乗員の視認の仕方は多様であり、視認する位置やタイミングはそれぞれ異なる。乗員の運転フィーリングを大切にすることが安全な運転につながることは当然であり、乗員の個性や経験に合った視認の仕方も尊重する必要がある。
【0006】
しかしながら、従来技術は乗員の視認の仕方を一般化しており、個性や経験を生かす構成とはなっていなかった(例えば、特許文献1)。
【0007】
本発明は、車両の走行状態と道路情報を関連づけた情報として蓄積し、かかる情報に基づいて、乗員が視認したい車両周辺の画像を選択して、表示する車両周辺の視覚支援装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明にかかる一実施形態は、車載された車両の視覚支援装置であって、車両の周辺を撮像する複数の撮像手段と、道路を走行している車両の、少なくとも現在位置および時刻を含む走行状態を検出する走行状態検出手段と、少なくとも現在位置近傍を含み、車両の走行に関わる道路の情報が取得された、もしくは記憶された道路情報確認手段と、撮像された画像を選択する画像選択手段と、前記選択された画像を表示する表示手段と、を備える。
【0009】
そして、画像選択手段は、車両が現在位置から道路情報確認手段によって走行状態の変化が予想される変化予想地点へ移動しようとするときに、予想される前記走行状態の変化に応じて画像を自動選択するように構成されている。
【0010】
かかる構成は、車速の変化、方向指示器の操作、シフトチェンジ、ハザードランプの点灯、アクセル操作、およびブレーキ操作の機器操作等の走行状態の変化と、この走行状態が変化したときの位置情報等の道路情報と、を関連づけ、ここを変化予想地点とすることにより、予め乗員が必要とする車両周辺の画像を自動選択して表示させることができる。
【0011】
本発明によれば、車両を運転する乗員の嗜好や経験等を反映した車両の視覚支援装置を提供することができる。
【発明を実施するための最良の形態】
【0012】
[第1実施形態]
以下、本発明の第1実施形態について、図面を参照して説明する。図1は本実施形態にかかる車両の視覚支援装置の全体構成のブロック図である。
【0013】
本実施形態に係る視覚支援装置は、図1に示すように、自車の周辺を撮影する複数のカメラ(撮影手段)10(11,12,13)と、車両が走行する道路の情報を有する道路情報確認装置(道路情報確認手段)20と、車両位置32や車両信号33等の車両の走行状態31を検出する走行状態検出装置(走行状態検出手段)30と、撮影された画像を選択する画像選択装置(画像選択手段)40と、選択された画像を表示する表示装置50と、乗員が画像を手動で切り替えることができるようにする画像選択SW(画像選択スイッチ)60と、を備えている。
【0014】
カメラ10は、通常の可視光用のカメラを使用することができ、たとえば、CMOSカメラおよびCCDカメラを適用することができる。一つのカメラの視野範囲を広げて台数を減らすために、広角レンズや魚眼レンズ等を使用しても良い。カメラ10(11,12,13)は、たとえば左右のドアミラーの下部とリアの中央に配設することができる。かかる構成では、左右のドアミラー下部のカメラを回動可能に装着する、もしくは前記したように魚眼レンズを適用すれば、乗員が視認し難い助手席側の左側方を含め、車両の周辺のほとんどを撮影範囲とすることができる。
【0015】
道路情報確認装置20は、少なくとも位置情報と関連づけられた道路情報を取得する、もしくは、この道路情報をメモリ21に記憶して蓄積している。ここで、道路情報は、車両が走行したことがあるという記録、左折した記録、停車した記録等の過去の走行状態を記録したものでもよいし、車両がカーナビゲーションシステム(以下、「カーナビ」という)を備え、カーナビによって道路情報を取得してもよい。また、道路情報と関連づけされる位置情報は、後記する走行状態検出装置30の検出量の一つである車両位置32と同じであり、GPSによって取得され、必要に応じて過去の走行状態31の記録とともにメモリ21に記憶して蓄積される。
【0016】
走行状態検出装置30は、走行状態31を検出する。走行状態31は、少なくとも経度・緯度で表される車両位置32を含んでおり、必要に応じて車両信号33を構成する、アクセルの操作、ブレーキの操作、ステアリングの操舵角、シフトポジション、方向指示器(ウィンカ)の操作、ハザードの操作、車速などを含むようにしている。さらに、後記する画像選択SW60によって選択された手動選択画像を含むようにしてもよい。検出された走行状態31は、道路情報確認装置20のメモリ21に記憶され、また後記する画像選択装置40の画像の自動選択に使われる。
【0017】
画像選択装置40は、走行状態検出結果と道路情報とから、走行予定の経由地や目的地において走行状態の変化が予想されるとき、予想される走行状態の変化に応じて乗員の視認を支援する画像を自動選択する。
【0018】
たとえば、車両が所定位置において左折を行い、このとき左側方の画像を乗員が選択する頻度が高いという道路情報がメモリ21に蓄積されている場合、車両が所定位置に向かって走行しており、所定位置に近づいている走行状態が走行状態検出装置30によって検出されたならば、画像選択装置40は、所定位置に到達する前に左側方のカメラ10で撮影された画像を自動選択する。なお、画像選択には様々な局面があり、実施例として後に詳述する。
【0019】
表示装置50は、画像を表示できれば特に限定されず、カーナビのディスプレイや、オーディオやエアコンなどの車内装備された機器のモニタ用ディスプレイ等を適用することができる。表示装置50は、図1に示すように、通常、Aの地図もしくは図示していないが機器のモニタなどを表示しており、画像選択装置40が画像を自動選択したときや、画像選択SW60によって乗員が画像を選択したときにBの車両周辺の画像を表示する。表示の形態は、全画面をAの地図等やBの周辺画像とするアプリケーションを選択するようにしてもよいし、二つの画面を同時に表示させるアプリケーションを選択するようにしてもよい。カメラ11,12,13のアプリケーション1a,1b・・は、前記した選択される表示形態の種類を示している。
【0020】
なお、図1および以後のいくつかの図において、アプリケーション1a,1b・・は、それぞれのカメラ11,12,13に対応したものとして図示しているが、ECU70に備えられた中央処理装置(CPU)等にアプリケーション1a,1b・・が格納され、乗員の要求に応じて、切替スイッチ等により選択される仕様やカメラ自体にアプリケーション1a,1b・・を備えている仕様でもよい。
【0021】
画像選択SW60は、乗員が手動で画像を選択するための手段である。手動選択の結果は、走行状態検出装置30によって検出されるようにしてもよい。また画像選択SW60は、後記するキャンセルのためのスイッチとして兼用してもよい。また画像選択SW60を新たに設けることなく、カーナビの画像選択スイッチ等を兼用してもよい。
【0022】
前記した道路情報確認装置20、走行状態検出装置30および画像選択装置40は、図1に示すように、統合されてECU(電子制御装置)70を構成するようにしてもよい。たとえば、カーナビを搭載している車両において、カーナビにそれぞれの装置の機能の一部を担わせることができれば、不足する機能を補う装置を付加する構成としてもよい。
【0023】
以下第1実施形態にかかる実施例を数例説明する。第1実施形態は、地図情報を有しており、表示装置50に地図が表示されているが、目的地への誘導手段を使用していない実施例である。
【0024】
たとえば、乗員が通勤に車両を使用しており、自宅から勤務している会社へ車両を走行させる場合や、最寄りの駅に行く場合や、乗員の子供を学校へ送る場合などが該当する。このような場合、カーナビを装備した車両であっても、乗員は誘導手段を使用することなく、車両を走行させる。そして、カーナビのディスプレイ(表示装置50)には、車両の現在位置とその近傍の地図が表示されていることが多い。
【0025】
[実施例1−1]
図を参照して、実施例1−1について説明する。図2は走行状態31をメモリ21に記憶する手順を表すフロー図であり、図3は本実施例で画像選択装置40が画像を自動選択する手順の一般的なフロー図であり、図4は左折する交差点を対象とした場合の画像自動選択の実施例のフロー図であり、図5は表示されるアプリケーションの実施例を示す模式図である。以下の説明では、図1もあわせて参照する。
【0026】
乗員が車両に搭乗し、イグニッションスイッチ(IGN)をONすることにより、車両に搭載された機器に電力が供給される。図2に示すように、表示装置50には車両の現在位置とその近傍の地図が表示される(ステップS1101)。車両が発進すると、走行状態検出装置30は、出発した場所、時間、曜日等を検出し、検出結果はメモリ21に記録される(ステップS1102)。
【0027】
乗員が画像選択SW60を操作し(ステップS1103:YES)、いずれかのカメラ11,12,13の画像とそのアプリケーション1a、1b・・が選択される(ステップS1104)。
【0028】
画像選択装置40は、手動選択されたアプリケーションにしたがい手動選択画像を表示装置50に表示する(ステップ1105)。走行状態検出装置30は、画像が選択された場所とそのアプリケーションをメモリ21に記録し、同じ選択がなされた回数もカウントして記録する(ステップS1106)。
【0029】
表示装置50に手動選択された画像が表示された後、乗員が表示をカーナビの現在地スイッチ等を操作することよって地図情報に切り替えた場合(ステップS1107:YES)、表示装置50には地図情報が表示される(ステップS1108)。
【0030】
IGNがOFFとなり、車両に搭載された機器への電力の供給が停止したとき(ステップS1109:YES)、走行状態検出装置30は、到着した場所、時間、曜日等を検出し、検出結果はメモリ21に記録される(ステップS1110)。
【0031】
以上のように本実施例にかかる視覚支援装置は、初めに走行状態を記録し、その記録を蓄積する。出発した場所、到着した場所、それらの時間帯や曜日等の走行状態の記録が同じであって、高い頻度で記録されている場合、視覚支援装置は、出発場所、時間、曜日を走行状態検出装置30によって検出することにより、到着場所と経路を推定する(経路推定手段)。この経路推定は、ECU70の機能として構成することができ、カーナビの機能と協働すれば、到着場所を手動で選択しない誘導手段とすることもできる。
【0032】
前記した経路推定が確立した後、図3に示すように、本実施例にかかる視覚支援装置の画像選択装置40は、車両が現在位置から道路情報確認装置20によって走行状態の変化が予想される変化予想地点へ移動しようとするときに、予想される走行状態の変化に応じて画像を自動選択することができる。
【0033】
ここでいう変化予想地点とは、図2のステップ1106で記録された場所が相当する。
【0034】
以下、図3を参照して画像自動選択の流れを説明する。
【0035】
乗員が車両に搭乗し、イグニッションスイッチ(IGN)をONすることにより、車両に搭載された機器に電力が供給される。図3に示すように、表示装置50には車両の現在位置とその近傍の地図が表示される(ステップS1201)。走行状態検出装置30は、車両の位置(たとえば自宅)、時間、曜日等を検出する(ステップS1202)。検出した結果は、画像選択装置40に送られる。
【0036】
画像選択装置40は、道路情報確認装置20のメモリ21に蓄積された情報である、過去の自宅を出発した時間、曜日、走行経路を参照する(ステップS1203)。頻度が高い情報の記録が存在する場合、目的地(たとえば会社)を推定し、その経路を推定する(ステップS1204)。
【0037】
画像選択装置40は、推定された経路において、メモリ21に蓄積された画像選択SW60を操作した場所の記録(図2で説明したステップS1106)と選択した頻度が所定の閾値を超えるか否かを参照する(ステップS1205)。画像選択SW60の操作回数が閾値を超えている場合(ステップS1206:YES)、画像選択装置40は、過去に選択された画像と、過去に選択されたアプリケーションと、を自動選択し、表示装置50に表示する(ステップS1207)。
【0038】
自動選択された画像が表示装置50に表示された後に、乗員がカーナビの現在地スイッチ等を操作し、その操作回数が閾値を超える場合(ステップS1208:YES)、表示装置50には再び地図が表示される(ステップS1209)。
【0039】
IGNがOFFとなり、車両に搭載された機器への電力の供給が停止したとき(ステップS1210:YES)、走行状態検出装置30は、到着した場所、時間、曜日等を検出し、検出結果はメモリ21に記録される(ステップS1211)。
【0040】
以上のように、本実施例にかかる視覚支援装置は、前記したように経路を推定し、過去の記録を参照しつつ、車両が現在位置から、乗員によって頻繁に画像の選択操作がされていた変化予想地点へ移動しようとするときに、画像を自動選択することができる。
【0041】
運転の際の視認の場所やタイミングは、乗員の技量や経験等、または運転される車両の車体形状等によって、大きく異なる。本実施例は、乗員の過去の運転状況に基づき、画像を自動選択することにより、好適な視覚支援を実現させている。さらにステップS1211に示すように、走行状態検知結果を蓄積することにより、精度の高い経路推定と、画像の自動選択を実現させている。
【0042】
次に図4を参照して、変化予想地点の具体例を説明する。
【0043】
「地図の表示」(ステップS1301)、「車両位置の確認(例:自宅)」(ステップS1302)、「過去の自宅を出発した時間、曜日、走行経路を参照」(ステップS1303)および「目的地を推定(例:会社)」(ステップS1304)は、図3で説明したステップS1201〜1204と同じであるので説明を省略する。
【0044】
本実施例では、推定された経路に左折する交差点が存在している。画像選択装置40は、走行状態検出装置30によって検出された結果と道路情報確認装置20のメモリ21に蓄積された交差点の位置情報を参照しつつ、交差点までの距離を推定する。そして、交差点までの距離が、所定距離(図では500m)以上であれば(ステップS1305:NO)、引き続き走行状態の検出、経路推定(ステップ1302〜1304)を行う。交差点までの距離が、所定距離未満であれば(ステップS1305:YES)、交差点までの距離であるLと交差点に到達が予定される時間であるTを演算する(ステップS1306)。ここでTは、距離Lを走行状態検出装置30によって検出された車両信号33の一つである車速で除することで演算することができる。
【0045】
本実施例は、乗員の運転感覚を考慮して、交差点までの距離もしくは交差点に到達するまでの時間のいずれかが所定の値未満となった場合(ステップS1307:YES)に、画像選択装置40が画像を自動選択して、表示装置50に表示させる構成としている(ステップS1308)。
【0046】
図4では、距離Lが100m未満もしくは時間Tが10秒未満という条件としている(ステップS1307)。この条件を満たさない場合(ステップS1307:NO)、再度L,Tを演算する(ステップS1306)。
【0047】
選択される画像は、過去の車両の走行状態に基づくものであり、たとえば、乗員が常時、左折時の内輪差を視認している場合には、車両の左側方(助手席側)の画像が自動選択される。
【0048】
選択された画像は、左折が終了して所定時間(図では2秒)経過後に(ステップS1309:YES)、地図表示に切り替えられる構成としている(ステップS1310)。
【0049】
かかる構成によって、乗員が視認を必要とするときに、必要な画像を表示することができる。
【0050】
図5は、表示される画像の一例である。車両80が片側に複数の車線(図5では3車線)を有する道路を矢印方向に走行している。車両80の左右のドアミラー(図示せず)の下部にはカメラ10L,10Rが配設されており、カメラ10Lは視野LVを、カメラ10Rは視野RVを撮影することができる。車両80の後方であって、走行方向に向かって左側の車線を他車81が、右側の車線を他車82が走行しているとき、カメラ10Lが撮影する後方画像BVはLV1のように表示され、カメラ10Rが撮影する後方画像BVはRV1のように表示される。表示の形態は図1に示すそれぞれのカメラ10のアプリケーション1a、・・を選択することによって変更され、たとえばLV2やRV2のように、画面の中央に境界を設け、地図情報MAPと後方画像BVの2画面表示とすることもできる。
【0051】
たとえば、高速道路を走行中の車両80が、高速道路から退出する場合など、現在地近傍の地図情報MAPと後方を走行する他車81の情報である後方画像BVを並行して表示させることによって、乗員は、車線変更のための他の車線の状況と、高速道路退出後の情報と、をあわせて確認することができる。
【0052】
[実施例1−2]
次に本実施形態の変形例の一つについて図面を参照して説明する。なお、前記した実施例と共通する構成については省略し、差異のある部分を中心に説明する。図6は、図4で説明した状況と同様の左折する交差点を対象とした場合の画像自動選択の例のフロー図である。
【0053】
ステップS1401〜S1407とステップS1410〜S1411は、図4のステップS1301〜S1307とステップS1309〜S1310と同じであるため、説明を省略する。
【0054】
車両が交差点に近づき、ステップS1407がYESとなると、乗員は左折する前の準備として、方向指示器(ウィンカ)の操作、シフトチェンジ(ダウン)、アクセルから足を外す(アクセルOFF)、ブレーキを操作する(ブレーキON)等の機器を操作することが予想される。
【0055】
画像選択装置40は、たとえば、これらの機器操作(アクセルOFF,ブレーキON,シフトダウン)のいずれかが行われたとき(ステップS1408:YES)、メモリ21に蓄積された情報に基づき、該当する画像とそのアプリケーションを自動選択する。そして、表示装置50に画像を表示する(ステップS1409)。
【0056】
かかる構成は、車両の走行状態の変化を確実に予想することができ、もし、通常は左折している交差点を直進する場合に画像が自動選択されて表示されることを防止することができる。
【0057】
[実施例1−3]
次に本実施形態の他の変形例の一つについて図面を参照して説明する。なお、前記した実施例と共通する構成については省略し、差異のある部分を中心に説明する。図7は、図4で説明した状況と類似しているが、目的地を最寄り駅として、この最寄り駅で停車させる場合を対象とした場合の画像自動選択の例のフロー図である。
【0058】
ステップS1501〜S1507は、図4のステップS1301〜S1307と目的地が最寄り駅であること、画像選択のタイミングをこの最寄り駅としていること以外は同じであるため、説明を省略する。
【0059】
車両が最寄り駅に近づき、ステップS1507がYESとなると、乗員は駅構内に停車する前の準備として、ハザードランプを操作(ハザードON)すると予想される。
【0060】
画像選択装置40は、たとえば、ハザードランプが操作(ハザードON)されたとき(ステップS1508:YES)、メモリ21に蓄積された情報に基づき、該当する画像とそのアプリケーションを自動選択する。たとえば、最寄り駅の構内に停車する際は、通常、車両を左側に寄せ、乗員は左前側方を撮影した画像を選択している場合(アプリケーション1bとする)が多いと推定され、左前側方の画像が自動選択される。そして、表示装置50に画像が表示される(ステップS1509)。
【0061】
車両が停車している間は、その後の発進時に視認を必要とする左前側方の画像の表示が維持される(ステップS1510)。車両が発進して所定時間(図では2秒)経過すれば(ステップS1511:YES)、車両は通常の走行に移行するため、表示装置50には地図情報が表示される(ステップS1512)。
【0062】
かかる構成は、乗員の走行状態の記録を基に、駅構内での停止、発進等の特殊な運転状況に応じた画像を自動選択して表示させることができる。
【0063】
[実施例1−4]
次に本実施形態の他の変形例の一つについて図面を参照して説明する。なお、前記した実施例と共通する構成については省略し、差異のある部分を中心に説明する。図8は、図4で説明した状況と類似しているが、経由地を学校として、この学校近傍の道路を走行させる場合を対象とした場合の画像自動選択の例のフロー図である。
【0064】
ステップS1601〜S1604は、図4のステップS1301〜S1304と同じであるため、説明を省略する。
【0065】
前記したように、カーナビの誘導手段を使用しない場合であっても、本実施形態にかかる視覚支援装置は、車両が出発すると、蓄積された情報に基づいて、到着点と経路とを推定する。推定された経路は、学校の近傍を経由する場合があり得る。学校には、始業時間、終業時間があり、特定の時間帯に児童生徒が学校の近傍の道路を通学歩行等する、いわゆる通学時間帯が学校近傍の道路に設定される場合が多い。通学時間帯に学校近傍の道路を走行する際には、乗員は、安全確認のため、徐行運転をするとともに、特に車両の周囲を視認することが必要となる。一方、一般的に通学時間帯は平日に限定される。
【0066】
画像選択装置40は、経由地である学校の近傍に到達したとき(ステップS1605:YES)、時刻を参照する。そして、時刻が通学時間帯(たとえば、午前7時半から午前9時)であり、かつ曜日が通学日(たとえば、平日)であれば(ステップS1606:YES)、メモリ21に蓄積された情報に基づき、該当する画像とそのアプリケーションを自動選択する。たとえば、学校近傍の歩道のない道路を走行する際は、児童生徒が歩行する道路の左後側方を撮影した画像を選択している場合(アプリケーション1aとする)が多いと推定され、左後側方の画像が自動選択される。そして、表示装置50に画像が表示される(ステップS1607)。
【0067】
車両が学校近傍を通過し、所定距離(たとえば、学校から半径500m)離れると(ステップS1608:YES)、車両は通常の走行に移行するため、表示装置50には地図情報が表示される(ステップS1609)。
【0068】
IGNがOFFとなり、車両に搭載された機器への電力の供給が停止したとき(ステップS1610:YES)、走行状態検出装置30は、到着した場所、時間、曜日等を検出し、この学校近傍を走行したときの走行状態31の検出結果はメモリ21に記録される(ステップS1611)。
【0069】
かかる構成は、学校という経由地の特性(時刻、曜日、場所等)を鑑みて、乗員の走行状態の記録を基に、特殊な運転状況に応じた画像を自動選択して表示することができる。
【0070】
[実施例1−5]
次に本実施形態の他の変形例の一つについて図面を参照して説明する。なお、前記した実施例と共通する構成については省略し、差異のある部分を中心に説明する。図9は、図4で説明した状況と類似しているが、経由地に通行規制や車線減少の区間があり、この区間を走行させる場合を対象とした場合の画像自動選択の例のフロー図であり、図10は通行規制された道路を走行する車両を俯瞰した平面図と選択された画像の一例を示している。
【0071】
ステップS1701〜S1704は、図4のステップS1301〜S1304と同じであるため、説明を省略する。
【0072】
前記したように、カーナビの誘導手段を使用しない場合であっても、本実施形態にかかる視覚支援装置は、車両が出発すると、蓄積された情報に基づいて、到着点と経路とを推定する。推定された経路は、通行規制や車線減少の区間を経由する場合があり得る。
【0073】
通行規制や車線減少の区間は、道路工事や交通事故などに依存して時々刻々と変わる場合、時間帯によって定常的に変更が設定される場合、元々の道路の形態である場合等、区間設定の理由は様々である。
【0074】
したがってかかる区間に関連する情報は、道路交通情報通信システム(VICS)からの情報や、後記するテレマティクスによる他車からの情報や、メモリ21に蓄積された情報が該当し、いずれの情報を参照してもよい。以下は、通行規制を例として説明する。
【0075】
図10に示す通行規制区間CSの一例は、片側1車線であって中央に車線を仕切る線85が引かれた道路の通常区間NSが、工事のための壁W等が設置されることにより、道路の全幅が狭くなり、仕切る線85も消失させているものである。
【0076】
車両80は、対向車両83と交差して、通行規制区間CSを通過する必要があり、乗員は車両80を道路の左端に寄せつつ、走行しなければならない。乗員は、走行に当たって、壁Wと車両80との距離はもとより、車両80と壁Wとの間の領域VAに障害物が存在しないか十分に注意する必要がある。
【0077】
推定された経路において通行規制区間を経由する情報が、前記したように、道路交通情報通信システム(VICS)からの情報や、後記するテレマティクスによる他車からの情報や、メモリ21に蓄積された情報等によって取得されると(ステップS1705)、かかる通行規制区間までの距離が逐次検出される。そして、画像選択装置40は、通行規制区間までの距離が所定距離(図では100m)未満となったとき(ステップS1706:YES)、メモリ21に蓄積された情報に基づき、該当する画像とそのアプリケーションを自動選択する。たとえば、図10に示す車両80の左前側方の領域VA(アプリケーション1bとする)の画像が自動選択される。そして、表示装置50に画像が表示される(ステップS1707)。
【0078】
通行規制区間の走行が終了して、所定距離(図では100m)を過ぎると(ステップS1708:YES)、車両は通常の走行に移行するため、表示装置50には地図情報が表示される(ステップS1709)。
【0079】
IGNがOFFとなり、車両に搭載された機器への電力の供給が停止したとき(ステップS1710:YES)、走行状態検出装置30は、到着した場所、時間、曜日等を検出し、この通行規制区間近傍を走行したときの走行状態31の検出結果はメモリ21に記録される(ステップS1711)。
【0080】
なお、通行規制は区間とともに時間帯によって行われる場合もある。したがって、通行規制時間帯に関する情報が取得されれば、車両80が走行している時間もステップS1706と同様の条件判断を時間帯に関して行えることは言うまでもない。
【0081】
かかる構成は、通行規制区間という経由地の特性(時刻、曜日、場所等)を鑑みて、乗員の走行状態の記録を基に、特殊な運転状況に応じた画像を自動選択して表示することができる。
【0082】
[第2実施形態]
次に、本発明の第2実施形態について図面を参照して説明する。なお、第1実施形態と重複する部分については省略し、差異のある部分を中心に説明する。
【0083】
本実施形態は、カーナビを使用して目的地まで誘導されるものであり、過去の走行状態の記録から到着点までの経路を推定する第1実施形態と異なる。すなわち、図1に示す構成にカーナビが標準的に備える地図情報が記憶された地図情報記憶部(図示せず)と、この地図情報によって車両を出発点から指定された到着点への誘導経路に誘導する誘導部(図示せず)と、を加えた構成となっている。
【0084】
以下、第2実施形態にかかる実施例を数例紹介する。
【0085】
[実施例2−1]
図1および図11を参照して、実施例2−1について説明する。図11は、本実施例で画像選択装置40が画像を自動選択する手順のフロー図であり、左折する交差点を対象としている。なお、図11の「NAVI」は、カーナビという機器に加えて、カーナビによる経路誘導、誘導する経路に関連する情報を含めた意味で使用している。
【0086】
図11は、第1実施形態の代表的な実施例である図4と比較すると分かるように、図4のステップS1301〜S1304の手順は、既にカーナビが誘導経路を設定しているため必要ない。
【0087】
本実施例では、誘導経路に左折する交差点が存在している。画像選択装置40は、カーナビの交差点の位置情報を参照しつつ、交差点までの距離を推定する。そして、交差点までの距離が、所定距離(図では500m)以上であれば(ステップS2102:NO)、引き続き経路誘導(ステップS2101)を行う。交差点までの距離が、所定距離(図では500m)未満であれば(ステップS2102:YES)、左折時に視認が必要な視野をカバーする左後側方のカメラを予め選択しておく(ステップS2103)。
【0088】
交差点までの距離であるLと交差点に到達が予定される時間であるTを演算する(ステップS2104)。ここでTは、距離Lを走行状態検出装置30によって検出された車両信号33の一つである車速で除することで演算することができる。
【0089】
本実施例は、実施例1−1(図4)と同様に、乗員の運転感覚を考慮して、交差点までの距離もしくは交差点に到達するまでの時間のいずれかが所定の値未満となった場合(ステップS2105:YES)に、画像選択装置40が画像を自動選択して、表示装置50に表示させる構成としている(ステップS2106またはS2107)。
【0090】
図11では、距離Lが100m未満もしくは時間Tが10秒未満という条件としている(ステップS2105)。この条件を満たさない場合(ステップS2105:NO)、再度L,Tを演算する(ステップS2104)。
【0091】
選択される画像は、左折時には路肩を走行する自転車や左折の内輪差を視認することが多く、車両の左後側方(助手席側)の画像が自動選択される。自動選択された画像は、表示装置50に表示されるが、図5の画面例のように、カーナビの経路誘導画面と左後側方の画像とを並んで表示させてもよいし(ステップS2106)、左後側方の画像のみを表示させてもよい(ステップS2107)。かかる選択は、乗員が任意にカーナビの画面選択スイッチ等で操作することができる。
【0092】
選択された画像は、左折が終了して所定時間(図では2秒)経過後に(ステップS2108:YES)、カーナビの経路誘導画面に切り替えられる構成としている(ステップS2109)。
【0093】
かかる構成によって、乗員が視認を必要とするときに、必要な画像を表示することができる。
【0094】
[実施例2−2]
次に本実施形態の変形例の一つについて図面を参照して説明する。なお、前記した実施例と共通する構成については省略し、差異のある部分を中心に説明する。図12は、優先道路を退出、もしくは、道路の分岐を対象とした場合の画像自動選択の実施例のフロー図である。
【0095】
優先道路から退出、もしくは、道路の分岐は、左右いずれの方向もあり得る。走行している道路が、片側に複数の車線を有する道路の場合、場合によっては、車線を変更した後、退出もしくは分岐するように車両を走行させる必要がある。また、退出や分岐の直前での車線変更等は危険が伴うため、時間的および距離的にある程度余裕をもった視認行動が必要となる。
【0096】
かかる状況を鑑みて、本実施例は、カーナビによって経路誘導を開始し(ステップS2201)、経由地に優先道路から退出、もしくは、道路の分岐のような走行状態の変化が予想される変化予想地点があるときは、変化予想地点までの距離を常に監視し、所定距離(図では1km)未満となったとき(ステップS2202:YES)、退出もしくは分岐が道路の右側なのか(ステップS2203:No)、左側なのか(ステップS2203:YES)を判定する。左側の場合はカメラ11が選択され(ステップS2204)、右側の場合はカメラ12が選択される(ステップS2205)。なお、ここでは、カメラ11、12が左側か、右側か、もしくは中央か、という特定はしていないが、いずれも後方の視野を有するものとしている。道路状況によっては、中央後方の視野の方が、乗員にとって視認に貢献することがあるからである。
【0097】
変化予想地点までの距離と時間を演算し、所定距離未満もしくは到達まで所定時間未満であるか、否かを判断する手順(ステップS2206,2207)は、前記した実施例2−1と同様であるが、退出や分岐は自動車専用道路を走行時に必要な場合が多くなるため、所定距離、所定時間とも大きくなっている(図では距離は500m未満、時間は20秒未満)。
【0098】
ステップS2207がYESとなった以後の流れ(ステップS2208〜S2211)は、実施例2−1のステップS2107〜S2110と同様であるため、説明を省略する。
【0099】
このように、本実施例は、優先道路から退出、もしくは、道路の分岐という走行状態に応じて、的確に画像を自動選択して、表示させることができる。
【0100】
[実施例2−3]
次に本実施形態の変形例の一つについて図面を参照して説明する。なお、前記した実施例と共通する構成については省略し、差異のある部分を中心に説明する。図13は、図12で説明した状況と同様の優先道路を退出、もしくは、道路の分岐を対象とした場合の画像自動選択の例のフロー図であるが、走行車線が片側2車線以上ある道路を対象としている。
【0101】
ステップS2301〜S2303は、図12のステップ2201〜S2203と同じであるため説明を省略する。
【0102】
走行している道路が、片側に複数の車線を有する道路のとき、場合によっては、車線を変更した後、退出もしくは分岐するように車両を走行させる必要がある。
【0103】
本実施例は、左側に退出もしくは分岐する場合(ステップS2303:YES)、走行している道路が片側2車線以上あるか、否か、判定を行う。そして、片側2車線以上の道路であれば(ステップS2304:YES)、次に車両が左端の車線を走行しているか、否か、の判定(ステップS2305)を行う。車両が、左端以外の車線を走行している場合は、車線変更を行った後に、退出もしくは分岐を行う必要があるからである。
【0104】
車両が、左端以外の車線を走行している場合(ステップS2305:YES)、左後側方のカメラが選択される。変更しようとする車線を後方から他車が走行しているか、否か、を視認するためである。
【0105】
選択された画像の表示(ステップS2307,S2308、S2314,S2315)および、以後の流れについては、実施例2−2の図12のステップSS2208〜S2211と同様であるので、説明を省略する。
【0106】
右側に退出もしくは分岐する場合の流れ(ステップ2309〜S2315)については、左側に退出もしくは分岐と同様であるため説明を省略する。
【0107】
このように、本実施例は、片側に複数の走行車線を有する道路から退出、もしくは、道路の分岐という走行状態に応じて、的確に画像を自動選択して、表示させることができる。
【0108】
[実施例2−4]
次に本実施形態の変形例の一つについて図面を参照して説明する。なお、前記した実施例と共通する構成については省略し、差異のある部分を中心に説明する。図14は、経由地に道路の合流地点が含まれる場合を対象とした画像自動選択の実施例のフロー図である。
【0109】
道路の合流は、左右いずれの方向からもあり得る。そして、自動車専用道路に進入するときなど、優先道路に合流する場合は、優先道路を走行する車両は車速が速く、合流しようとする車両は、合流をする車線における他の車両の走行状況を視認する必要がある。同様に自動車専用道路のいわゆるジャンクションなどでは、合流地点から、車線が減少する場合もあり、合流する他の車両と、自分の車両との車間距離等も視認しながら、走行しなければならない。
【0110】
かかる状況を鑑みて、本実施例は、カーナビによって経路誘導を開始され(ステップS2401)、経由地に道路の合流地点があるときは、合流地点までの距離が常に監視され、所定距離(図では500m)未満となったとき(ステップS2402:YES)、合流が道路の右側なのか(ステップS2403:YES)、左側なのか(ステップS2403:NO)を判定する。右側の場合はたとえばカメラ11が選択され(ステップS2404)、左側の場合はたとえばカメラ12が選択される(ステップS2405)。なお、ここでは、カメラ11、12が左側か、右側か、もしくは中央か、という特定はしていないが、いずれも後方の視野を有するものとしている。道路状況によっては、中央後方の視野の方が、乗員にとって視認に貢献することがあるからである。
【0111】
以後の流れ(ステップS2406〜S2411)については、実施例2−2の図12のステップS2206〜S2211と同様であるため、説明を省略する。
【0112】
このように、本実施例は、道路の合流地点を経由する場合、合流時の走行状態に応じて、的確に画像を自動選択して、表示させることができる。
【0113】
[実施例2−5]
次に本実施形態の変形例の一つについて図面を参照して説明する。なお、前記した実施例と共通する構成については省略し、差異のある部分を中心に説明する。図15は、図11で説明した状況と同様の左折する交差点を対象とした場合であって、図6で説明した構成と類似した機器操作を画像自動選択のトリガーとした場合のフロー図である。
【0114】
ステップS2501〜S2505は、図11のステップS2101〜S2105と同様であるため、説明を省略する。
【0115】
車両が交差点に近づき、ステップS2505がYESとなると、乗員は左折する前の準備として、方向指示器(ウィンカ)の操作、シフトチェンジ(ダウン)、アクセルから足を外し(アクセルOFF)ブレーキを操作(ブレーキON)等の機器を操作すると予想される。
【0116】
画像選択装置40は、たとえば、これらの機器操作(アクセルOFF,ブレーキON,シフトダウン)のいずれかが行われたとき(ステップS2506:YES)、該当する画像とそのアプリケーションを自動選択する。そして、表示装置50に画像を表示する(ステップS2507,S2508)。
【0117】
かかる構成は、左折している交差点に応じた画像を自動選択することができる。
【0118】
[実施例2−6]
次に本実施形態の変形例の一つについて図面を参照して説明する。なお、前記した実施例と共通する構成については省略し、差異のある部分を中心に説明する。図16は、図15で説明した状況と同様の左折する交差点を対象とした場合のフロー図である。
【0119】
本実施例は、ステップS2606に判定に示すように、「アクセルOFFとシフトダウン」、「アクセルOFFとブレーキON」、「シフトダウンとブレーキON」のいずれかの組み合わせの一つでも該当する機器操作が行われたときに、画像が自動選択される構成としている。
【0120】
かかる構成は、実際の運転状況に即したものであり、画像を自動選択し、表示する的確なタイミングを提供することができる。
【0121】
[実施例2−7]
次に本実施形態の変形例の一つについて図面を参照して説明する。なお、前記した実施例と共通する構成については省略し、差異のある部分を中心に説明する。図17は実施例1−4の図8で説明した状況と同様の経由地に学校がある場合、図18は実施例1−5の図9で説明した状況と同様の経由地に通行規制区間ある場合を対象としたフロー図である。
【0122】
実施例1−4、1−5は、原則的に、過去の情報に基づきカメラとそのアプリケーションを選択している。しかしながら、本実施例は、カーナビによって設定された誘導経路の経由地に学校や通行規制区間がある場合であり、予め選択される画像の撮影方向は設定されている(S2704,S2705:左後側方、ステップS2804:左前側方)。
【0123】
なお、他の構成については、図17は図8と、図18は図9とほぼ同様であるため、説明を省略する。
【0124】
かかる構成は、普段通行していない道路を走行する場合であっても、視認を支援する画像を自動選択することができる。
【0125】
[第3実施形態]
次に、本発明の第3実施形態について図面を参照して説明する。なお、第1、第2実施形態と重複する部分については省略し、差異のある部分を中心に説明する。
【0126】
前記した第1実施形態は、地図情報を有しており、表示装置50に地図が表示されているが、目的地への誘導手段を使用していない場合の例であり、第2実施形態は、カーナビを使用して目的地まで誘導する場合の実施例であった。本実施形態は、GPS等の車両の位置を側位する装置を車載していればよく、第1実施形態も第2実施形態も、本実施形態の中に含まれる。そして、本実施形態は、第1実施形態の目的地推定とその経路推定、第2実施形態の目的地までの経路誘導は行わない。
【0127】
以下の説明では、GPS等の車両の位置を側位する装置のみ車載しており、図1の表示装置50の表示画面Aは、地図情報でもNAVI画面でもなく、たとえば、オーディオやエアコンなどの車内装備された機器のモニタを示しており、いわゆるモニタ用ディスプレイ等を適用した実施例としている。
【0128】
基本的な構成は、図1に示すとおりであり、前記のように表示装置50の表示画面Aが車載機器モニタ用ディスプレイであることが異なる。このディスプレイは、カメラ10によって撮影された画像を表示できるものであれば特に限定はされない。
【0129】
以下、第3実施形態にかかる実施例を数例紹介する。
【0130】
[実施例3−1]
図を参照して、実施例3−1について説明する。図19は本実施例で画像選択装置40が画像を自動選択する手順の一般的なフロー図である。以下の説明では、図1もあわせて参照する。
【0131】
車両が走行中、表示装置50は、車載機器モニタ(図では「オーディオ」)を表示する(ステップS3101)。走行状態検出装置30は、常に車両の位置をGPS等によって側位し、確認を行っている(ステップS3102)。画像選択SW60が操作されると、この操作の内容である選択されたカメラ10とそのアプリケーション、および、操作された位置(たとえば、経度・緯度)が、道路情報確認装置20のメモリ21に記録される。メモリ21に蓄積された過去の記録が参照され、この新たな記録が過去の記録と同じであれば、選択された回数を加算し、「選択回数」として記録される(ステップS3103)。
【0132】
「選択回数」が所定回数を超えた場合(ステップS3104:YES、図では閾値3回としている)、画像選択装置40はメモリ21に蓄積された過去の記録を参照して画像を自動選択し、表示装置50にその画像が表示される(ステップS3105)。図19では閾値3回を超えるアプリケーションが複数ある場合を想定しており(ステップ3104)、最も選択回数が多いアプリケーションを選択している。もし、閾値を超えるアプリケーションが一つであれば、かかる判定は行わず、対象となるアプリケーションが選択されることは言うまでもない。
【0133】
かかる構成は、乗員が日頃の運転において、画像を手動選択することによって視認を頻繁に行っている場所を走行状態の変化が予想される変化予想地点とみなし、予め画像を自動選択するため、乗員が煩雑な作業をすることなく車両の周辺を視認することを支援することができる。
【0134】
[実施例3−2]
次に本実施形態の変形例の一つについて図面を参照して説明する。なお、前記した実施例と共通する構成については省略し、差異のある部分を中心に説明する。図20は、図19と同様な蓄積された情報に基づく画像自動選択の例のフロー図である。
【0135】
本実施形態は、画像の手動選択に関わる情報と選択された位置の情報とから構成されており、該当位置における車両の走行の変化を推定しているものでない。したがって、たとえば、通常は左折する交差点である該当する位置に車両が到達しても、日によっては直進する場合や右折する場合も想定される。かかる状況において、左折するために有用な車両の左側方を撮影した画像が自動選択され、表示されても、乗員の視覚支援とはならず、むしろ煩わしい。
【0136】
本実施例は、かかる状況を回避するものであり、実施例3−1に車両の走行に関連する機器の操作状態(車両信号33)を加え、画像自動選択の判断を的確にするものである。
【0137】
ステップS3201〜S3204は、図19のステップS3101〜S3104と同様であるが、ステップS3203において、前記したように車両の走行に関連する機器の操作状態(図では、左ウィンカONまたはハザードON)も、車両の位置と画像手動選択とともに記録される。
【0138】
そして、走行状態検出装置30によって、左ウィンカONが検出されたときは(ステップS3206:YES)、画像選択装置40は、過去の記録に基づき画像を自動選択して、表示装置50に画像を表示する(ステップS3206)。同様に、ハザードONが検出されたときは(ステップS3205:YES)、画像選択装置40は、過去の記録に基づき画像を自動選択して、表示装置50に画像を表示する(ステップS3207)。
【0139】
なお、車両信号33の情報を蓄積せずに、左ウィンカONならば左折とみなして車両の左側後方の画像を、ハザードONならば駐停車とみなして車両左側前方もしくは後方の画像を自動選択するようにしてもよい。
【0140】
かかる構成によって、本実施例は、画像自動選択の判断をより的確にすることができる。
【0141】
[実施例3−3]
次に本実施形態の変形例の一つについて図面を参照して説明する。なお、前記した実施例と共通する構成については省略し、差異のある部分を中心に説明する。図21は、乗員が登録した選択画像を自動選択する実施例のフロー図である。
【0142】
乗員が通勤に車両を使用しており、自宅から勤務している会社へ車両を走行させる場合や、最寄りの駅に行く場合や、乗員の子供を学校へ送る場合などは、車両は同じ経路を走行する。
【0143】
この経路の経由地に交差点があり、交差点を左折する場合や、目的地で車両を駐停車する場合など、乗員は決まったカメラの画像によって車両周辺を視認することが多いと想定される。
【0144】
本実施例は、かかる状況において、予め選択する画像を登録し、対象となる場所でその画像が自動選択されることにより、走行中に画像選択SW60を操作する煩わしさを回避するものである。
【0145】
実施例3−1等と同様に、本実施例においても、GPS等によって走行する車両の位置は側位されている。
【0146】
視覚支援を必要とする地点において、乗員は画像選択SW60を一定時間押し続ける(長押し、ステップS3303:YES)。長押しすることにより、選択される画像およびそのアプリケーションと車両の位置が登録される(ステップS3302)。
【0147】
図21では、単に長押しによって選択された画像およびそのアプリケーション(ステップS3304)が、表示装置50に表示されている(ステップS3305)が、次回以降の車両の走行において、該当する地点に到達すると、画像選択装置40は、登録された画像を自動選択し、表示装置50に表示させる。
【0148】
かかる構成は、日頃通行する道路において、視認を必要とする場所を経由するときに、自動で画像が選択され、表示されるため、煩わしい操作を必要としない。
【0149】
[実施例3−4]
次に本実施形態の変形例の一つについて図面を参照して説明する。なお、前記した実施例と共通する構成については省略し、差異のある部分を中心に説明する。図22は、本実施例のフロー図である。
【0150】
本実施例では、たとえば、メモリ21のような記憶媒体に、予め、左ウィンカON等の運転操作にかかる車両信号33と、操作される場所と、視認が必要と想定される画像とそのアプリケーション(以下「お勧めアプリケーション」という)と、を関連づけるデータベースを保存している。
【0151】
車両が走行中、表示装置50は、車載機器モニタ(図では「オーディオ」)を表示する(ステップS3401)。走行状態検出装置30は、常に車両の位置をGPS等によって側位し、確認を行っている(ステップS3402)。画像選択SW60が操作されると(ステップS3403:YES)、選択されたアプリケーション(ステップS3407)の画像が選択され、表示装置50に表示される(ステップS3408)。
【0152】
画像選択SW60が操作されない場合(ステップS3403:NO)であって、運転操作にかかる車両信号33が検出されたときは(図では、左ウィンカON、ステップS3404:YES)、前記したお勧めアプリケーションのデータベースが参照され(ステップS3405)、該当するアプリケーションがデータベースに存在する場合は、その画像が自動選択され、表示装置50に表示される(ステップS3406)。
【0153】
かかる構成によって、本実施例は、乗員が特に必要とするときは手動で画像を選択することができ、それ以外のときは画像選択装置40が、視覚支援に好適な画像を自動選択するために、煩わしい操作を回避することができる。
【0154】
[実施例3−5]
次に本実施形態の変形例の一つについて図面を参照して説明する。なお、前記した実施例と共通する構成については省略し、差異のある部分を中心に説明する。図23は、本実施例のフロー図である。
【0155】
本実施例は、実施例3−4、図22に類似した構成となっている。しかし、実施例3−4のお勧めアプリケーションは、一般化されたデータベースであり、自動選択された画像が乗員の嗜好や経験に沿ったものではないことがあり得る。
【0156】
そこで、本実施例は乗員の意思に沿わない自動選択を回避する構成を提供する。
【0157】
ステップS3501〜S3506と、S3511,S3512は、実施例3―4の図22と同様であるため説明を省略する。
【0158】
本実施例は、表示装置50にお勧めアプリケーションの画像が自動選択され、表示されたときに(ステップS3506)、乗員が画像選択SW60を操作する、もしくは、元の画像であるオーディオモニタに戻す、等の表示画像のキャンセル行為を監視する(ステップS3507)。
【0159】
表示画像のキャンセル行為があった場合は(ステップS3507:YES)、キャンセル地点(緯度、経度)とキャンセルされたアプリケーションが道路情報確認装置20のメモリ21に記録される(ステップS3508)。メモリ21に蓄積された過去の記録が参照され、この新たな記録が過去の記録と同じであれば、キャンセル行為の回数を加算し、「キャンセル回数」として記録される。
【0160】
「キャンセル回数」が所定回数を超えた場合(ステップS3509:YES、図では閾値3回としている)、画像選択装置40はメモリ21に蓄積された過去の記録を参照して、表示装置50にお勧めアプリケーションの画像を表示しない(ステップS3510)。
【0161】
かかる構成は、乗員の意思に沿わない自動選択を回避することができる。
【0162】
[実施例3−6]
次に本実施形態の変形例の一つについて図面を参照して説明する。なお、前記した実施例と共通する構成については省略し、差異のある部分を中心に説明する。図24は、本実施例のフロー図である。
【0163】
本実施例は、実施例3−5、図23に類似した構成となっている。実施例3−5では、お勧めアプリケーションのキャンセル回数により、お勧めアプリケーションの画像が自動選択されない構成であったが、本実施例は、データベースからこのお勧めアプリケーションを削除する。
【0164】
ステップS3601〜S3606と、S3609,S3610は、実施例3―5の図23と同様であるため説明を省略する。
【0165】
本実施例は、表示装置50にお勧めアプリケーションの画像が自動選択され、表示されたときに(ステップS3606)、乗員が画像選択SW60を操作する、もしくは、元の画像であるオーディオモニタに戻す、等の表示画像のキャンセル行為を行い、さらに所定時間以上、スイッチやボタン等を操作し続けた(図では「長押し」としている)場合に(ステップS3607:YES)、乗員は当該画像を視認しないという意思があると判断し、当該画像はお勧めアプリケーションから削除される(ステップS3608)。
【0166】
かかる構成は、乗員の意思に沿わない自動選択を回避することをできる。
【0167】
[第4実施形態]
次に、本発明の第4実施形態について図面を参照して説明する。なお、前記した実施形態と重複する部分については省略し、差異のある部分を中心に説明する。図25は、本実施形態にかかる一実施例の模式的な説明図である。
【0168】
本実施形態に係る視覚支援装置は、図25に示すように、同様の視覚支援装置を備える複数の車両V1,V2,V3,V4があり、それぞれの車両V1,V2,V3,V4は通信回線によってセンターサーバCSと結ばれている環境が前提となる。
【0169】
たとえば、一の車両V1の乗員が画像を画像選択SWによって手動選択の操作をしたとき、選択された画像と操作されたときの交通状況(場所、天候、時刻、曜日、混雑状況、速度等)の情報は通信回線(テレマティクス等)によりセンターサーバCSに送信される(矢印OUT)。
【0170】
センターサーバCSは、前記した一の車両V1に加え、他の複数の車両V2,V3,V4から送信されたデータ(矢印OUT)に基づいてどのような状態もしくは状況下でどの画像が選択されたかを集計する。
【0171】
センターサーバCSは、集計結果を基に、交通状況ごとに画像やそのアプリケーションの選択頻度を算出し、この情報をそれぞれの車両V1,V2,V3,V4に送信し(矢印IN)、情報を共有する。
【0172】
そして、ある車両(たとえば、車両V2)が、所定の選択頻度を超える交通状況に遭遇した場合に、車両V2の視覚支援装置の画像選択装置40は、共有した情報に基づいて画像を自動選択し、表示装置50に表示する。
【0173】
かかる構成によって、道路交通情報通信システム(VICS)からの情報だけでは把握しきれない道路情報も共有することができ、視認が必要な場所において、的確な画像を選択し、表示させることができる。
【0174】
以上、本発明について好適な実施形態とその実施例を説明した。本発明は、図面に記載したものに限定されることなく、その趣旨を逸脱しない範囲で設計変更が可能である。
【図面の簡単な説明】
【0175】
【図1】第1実施形態にかかる車両の視覚支援装置の全体構成のブロック図である。
【図2】実施例1−1にかかる走行状態をメモリに記憶する手順を表すフロー図である。
【図3】実施例1−1にかかる画像選択装置が画像を自動選択する手順の一般的なフロー図である。
【図4】実施例1−1にかかる左折する交差点を対象とした場合の画像自動選択の例のフロー図である。
【図5】実施例1−1にかかる表示されるアプリケーションの例を示す模式図である。
【図6】実施例1−2にかかる左折する交差点を対象とした場合の画像自動選択の例のフロー図である。
【図7】実施例1−3にかかる目的地を最寄り駅として、この最寄り駅で停車させる場合を対象とした場合の画像自動選択の例のフロー図である。
【図8】実施例1−4にかかる経由地を学校として、この学校近傍の道路を走行させる場合を対象とした場合の画像自動選択の例のフロー図である。
【図9】実施例1−5にかかる経由地に通行規制や車線減少の区間があり、この区間を走行させる場合を対象とした場合の画像自動選択の例のフロー図である。
【図10】実施例1−5にかかる通行規制された道路を走行する車両を俯瞰した平面図と選択された画像の一例を示した図である。
【図11】第2実施形態の実施例2−1にかかる画像選択装置が画像を自動選択する手順のフロー図である。
【図12】実施例2−2にかかる優先道路を退出、もしくは、道路の分岐を対象とした場合の画像自動選択の例のフロー図である。
【図13】実施例2−3にかかる走行車線が片側2車線以上ある道路を対象とした優先道路を退出、もしくは、道路の分岐を対象とした場合の画像自動選択の例のフロー図である。
【図14】実施例2−4にかかる経由地に道路の合流地点が含まれる場合を対象とした画像自動選択の例のフロー図である。
【図15】実施例2−5にかかる左折する交差点を対象とした場合であって、機器操作を画像自動選択トリガーとした場合のフロー図である。
【図16】実施例2−6にかかる左折する交差点を対象とした場合のフロー図である。
【図17】実施例2−7にかかる経由地に学校がある場合を対象としたフロー図である。
【図18】実施例2−7にかかる経由地に通行規制区間ある場合を対象としたフロー図である。
【図19】実施例3−1にかかる画像選択装置が画像を自動選択する手順の一般的なフロー図である。
【図20】実施例3−2にかかる蓄積された情報に基づく画像自動選択の例のフロー図である。
【図21】実施例3−3にかかる乗員が登録した選択画像を自動選択する例のフロー図である。
【図22】実施例3−4にかかる画像選択例のフロー図である。
【図23】実施例3−5にかかる画像選択と画像キャンセル例のフロー図である。
【図24】実施例3−6にかかる画像選択とアプリケーション削除例のフロー図である。
【図25】第4実施形態にかかる一実施例の模式的な説明図である。
【符号の説明】
【0176】
10,11,12,13 カメラ
20 道路情報確認装置
21 メモリ
30 走行状態検出装置
31 走行状態
32 車両位置
33 車両信号
34 画像選択
40 画像選択装置
50 表示装置
60 画像選択SW
70 ECU
80 車両
81,82 他の車両
83 対向車両
85 仕切り線
【特許請求の範囲】
【請求項1】
車載された車両の視覚支援装置であって、
前記車両の周辺を撮像する複数の撮像手段と、
道路を走行している前記車両の、少なくとも現在位置および時刻を含む走行状態を検出する走行状態検出手段と、
少なくとも前記現在位置近傍を含み、前記車両の走行に関わる前記道路の情報が取得された、もしくは記憶された道路情報確認手段と、
前記撮像された画像を選択する画像選択手段と、
前記選択された画像を表示する表示手段と、を備え、
前記画像選択手段は、前記車両が前記現在位置から前記道路情報確認手段によって前記走行状態の変化が予想される変化予想地点へ移動しようとするときに、予想される前記走行状態の変化に応じて画像を自動選択する、車両の視覚支援装置。
【請求項2】
経路推定手段をさらに備え、
この経路推定手段は、前記走行状態検出手段によって検出された走行状態を記憶し、
この記憶された走行状態は、少なくとも位置と所定の時刻によって区切られた時間帯とを含み、前記所定の位置と前記時間帯とを関連づけされた走行状態記録となっており、
前記所定の位置と前記時間帯が略一致する前記走行状態記録が所定回数を超えるとき経路走行状態記録として記憶し、
前記車両の走行が前記経路走行状態記録に含まれている場合に、前記記憶された走行状態から前記車両の到着点およびこの到着点への経路を推定する、請求項1に記載の車両の視覚支援装置。
【請求項3】
前記画像選択手段は、画像選択スイッチを備えており、この画像選択スイッチを操作することによっても画像が手動選択され、
前記道路情報確認手段は、画像選択操作がなされたときに、手動選択された画像とこの画像選択操作の時刻および所定時間内の前記画像選択操作の頻度を記憶する記憶手段を備えており、
この記憶手段は、前記走行状態検出手段によって検出された前記画像選択操作がなされたときの位置も記憶する、請求項2に記載の車両の視覚支援装置。
【請求項4】
前記画像選択手段は、前記選択された画像の表示形態を複数備えており、
この表示形態は前記画像選択スイッチを操作することによって手動選択され、
前記記憶手段は、手動選択された前記表示形態を記憶する、請求項3に記載の車両の視覚支援装置。
【請求項5】
前記記憶手段は、所定の位置とそこで手動選択された所定の画像とを関連させた選択記録として記憶し、さらにこの選択記録が所定回数を超えて記憶された場合、前記所定の位置を前記変化予想地点として記憶し、
前記画像選択手段は、車両が前記変化予想地点を走行するとき、前記選択記録の画像と同じ視野で撮像された画像を自動選択する、請求項3または請求項4に記載の車両の視覚支援装置。
【請求項6】
前記経路推定手段によって推定された前記経路に前記変化予想地点があるとき、前記画像選択手段は、前記車両が前記変化予想地点を走行する所定距離前もしくは所定時間前に、予想される前記走行状態の変化に応じた画像を自動選択する、請求項2ないし請求項5のいずれか一項に記載の車両の視覚支援装置。
【請求項7】
地図情報が記憶された地図情報記憶手段をさらに備え、
前記変化予想地点は、記憶された前記地図情報において、少なくとも、右折もしくは左折する交差点、片側に複数の車線がある道路における車線変更の頻度が高い地点、複数の道路の合流地点、分岐地点、および自動車専用道路の退出点が含まれる、請求項6に記載の視覚支援装置。
【請求項8】
前記画像選択手段は、前記地図情報によって取得された地点における所定の時間帯での道路情報に基づいて、画像を自動選択する前記変化予想地点までの所定距離もしくは所定時間を設定する、請求項7に記載の視覚支援装置。
【請求項9】
予想される前記走行状態の変化には、少なくとも、方向指示器の操作、シフトチェンジ、ハザードランプの点灯、アクセル操作、およびブレーキ操作の機器操作が含まれる、請求項1ないし請求項8のいずれか一項に記載の視覚支援装置。
【請求項10】
前記画像選択手段は、前記機器操作がされたときに、画像を自動選択する、請求項9に記載の視覚支援装置。
【請求項11】
前記経路推定手段によって推定された前記経路に左折する交差点があるとき、前記画像選択手段は、前記変化予想地点として前記交差点を設定し、前記車両の左後側方の画像を自動選択する、請求項6ないし請求項10のいずれか一項に記載の車両の視覚支援装置。
【請求項12】
前記経路推定手段によって推定された到着点が鉄道の駅構内であるとき、前記画像選択手段は、前記変化予想地点として前記駅構内を設定し、前記車両の左前側方の画像を自動選択する、請求項6ないし請求項11のいずれか一項に記載の車両の視覚支援装置。
【請求項13】
前記経路推定手段によって推定された前記経路に学校があるとき、前記画像選択手段は、前記変化予想地点として前記学校と前記学校の近傍を設定し、前記車両の左後側方の画像を自動選択する、請求項6ないし請求項11のいずれか一項に記載の車両の視覚支援装置。
【請求項14】
道路交通情報通信システムをさらに備え、
前記経路推定手段によって推定された前記経路に通行規制された道路があると前記道路交通情報通信システムが検出したとき、前記画像選択手段は、前記変化予想地点として前記通行規制された道路を設定し、前記車両の左前側方の画像を自動選択する、請求項6ないし請求項11のいずれか一項に記載の車両の視覚支援装置。
【請求項15】
地図情報が記憶された地図情報記憶手段と、
この地図情報によって車両を出発点から指定された到着点への誘導経路に誘導する誘導手段と、をさらに備え、
前記道路情報確認手段は、記憶された前記地図情報と前記誘導経路を取得する、請求項1に記載の車両の視覚支援装置。
【請求項16】
前記表示手段は、前記地図情報と、前記選択された画像と、を並行して表示する、請求項15に記載の車両の視覚支援装置。
【請求項17】
前記誘導経路に前記変化予想地点があるとき、前記画像選択手段は、前記車両が前記変化予想地点を走行する所定距離前もしくは所定時間前に、予想される前記走行状態の変化に応じた画像を自動選択する、請求項15または請求項16に記載の車両の視覚支援装置。
【請求項18】
前記変化予想地点には、少なくとも、右折もしくは左折する交差点、片側に複数の車線がある道路における車線変更の頻度が高い地点、複数の道路の合流地点、分岐地点、および優先道路の退出点が含まれる、請求項17に記載の視覚支援装置。
【請求項19】
前記変化予想地点が、左折する交差点であるとき、前記画像選択手段は、前記車両の左後側方の画像を自動選択する請求項17または請求項18に記載の視覚支援装置。
【請求項20】
前記変化予想地点が優先道路からの退出点もしくは道路の分岐点であるとき、前記車両が左方向へ退出もしくは分岐する場合、前記画像選択手段は、前記車両の左後側方の画像を自動選択し、一方、前記車両が右方向へ退出もしくは分岐する場合、前記車両の右後側方の画像を自動選択する請求項17または請求項18に記載の車両の視覚支援装置。
【請求項21】
前記現在位置および前記地図情報に基づき、前記車両が走行している道路が片側に複数の走行車線を有しており、前記車両がいずれかの前記走行車線を走行しているかを検出する走行車線検出手段をさらに備え、
前記車両が走行している道路が優先道路であって、前記変化予想地点が、優先道路からの退出点もしくは道路の分岐点であり、前記車両がこの退出点で退出もしくはこの分岐点で分岐する場合、
前記退出点もしくは前記分岐点が前記優先道路の左側であり、前記車両が左端の車線以外を走行しているとき、前記画像選択手段は、前記車両の左後側方の画像を自動選択し、
一方、前記退出点もしくは前記分岐点が前記優先道路の右側であり、前記車両が右端の車線以外を走行しているとき、前記画像選択手段は、前記車両の右後側方の画像を自動選択する、請求項17または請求項18に記載の車両の視覚支援装置。
【請求項22】
前記現在位置および前記地図情報に基づき、前記車両が走行している道路が片側に複数の走行車線を有しており、前記車両がいずれかの前記走行車線を走行しているかを検出する走行車線検出手段をさらに備え、
前記車両が走行している道路が優先道路であって、前記変化予想地点が、優先道路からの退出点もしくは道路の分岐点であり、前記車両がこの退出点もしくはこの分岐点を通過する場合、
前記退出点もしくは前記分岐点が前記優先道路の左側であり、前記車両が右端の車線以外を走行しているとき、前記画像選択手段は、前記車両の右後側方の画像を自動選択し、
一方、前記退出点もしくは前記分岐点が前記優先道路の右側であり、前記車両が左端の車線以外を走行しているとき、前記画像選択手段は、前記車両の左後側方の画像を自動選択する、請求項17または請求項18に記載の車両の視覚支援装置。
【請求項23】
前記変化予想地点が、前記車両が走行している一の道路と他の道路とが合流する合流点であるとき、前記画像選択手段は、前記合流点が一の道路の左側である場合、前記車両の左後側方の画像を自動選択し、一方、前記合流点が一の道路の右側である場合、前記車両の右後側方の画像を自動選択する請求項17または請求項18に記載の車両の視覚支援装置。
【請求項24】
前記画像選択手段は、前記車両が前記変化予想地点を走行する所定距離前もしくは所定時間前に、予想される前記走行状態の変化に応じた画像を自動選択する、請求項15ないし請求項23のいずれか一項に記載の車両の視覚支援装置。
【請求項25】
予想される前記走行状態の変化には、少なくとも、方向指示器の操作、シフトチェンジ、ハザードランプの点灯、アクセル操作、およびブレーキ操作の機器操作が含まれる、請求項24に記載の視覚支援装置。
【請求項26】
前記画像選択手段は、前記機器操作がされたときに、画像を自動選択する、請求項25に記載の視覚支援装置。
【請求項27】
前記画像選択手段は、前記地図情報によって取得された地点における所定の時間帯での道路情報に基づいて、画像を自動選択する前記変化予想地点までの所定距離もしくは所定時間を設定する、請求項15ないし請求項17または請求項24ないし請求項26のいずれか一項に記載の視覚支援装置。
【請求項28】
前記誘導経路に学校もしくは商店街があるとき、前記画像選択手段は、前記変化予想地点として前記学校と前記学校の近傍もしくは前記商店街と前記商店街の近傍を設定し、前記車両の左後側方の画像を自動選択する、請求項15ないし請求項17または請求項24ないし請求項27のいずれか一項に記載の視覚支援装置。
【請求項29】
道路交通情報通信システムをさらに備え、
前記誘導経路に通行規制された道路があると前記道路交通情報通信システムが検出したとき、前記画像選択手段は、前記変化予想地点として前記通行規制された道路を設定し、前記車両の左前側方の画像を自動選択する、請求項15ないし請求項28のいずれか一項に記載の車両の視覚支援装置。
【請求項30】
前記画像選択手段は、画像を手動選択できる画像選択スイッチと、前記画像選択スイッチの前記手動選択された画像と前記手動選択がされたときの前記走行状態検出手段によって検出された走行状態とを記憶する記憶手段と、をさらに備え、
この記憶された走行状態は、少なくとも位置を含んでおり、
前記車両が所定の場所を走行しているとき、この所定の場所が前記記憶された走行状態に含まれており、前記車両の走行が所定の回数を超え、かつ、前記所定の場所における同じ撮像方向の画像の前記手動選択が所定の回数を超える場合に、前記画像選択手段は、この同じ撮像方向の画像を自動選択する、請求項1に記載の車両の視覚支援装置。
【請求項31】
前記画像選択手段は、前記選択された画像の表示形態を複数備えており、この表示形態も前記画像選択スイッチを操作することによって手動選択され、
前記記憶手段は、手動選択された前記表示形態を記憶し、
前記同じ撮像方向の画像が自動選択されるとき、同時に前記表示形態を自動選択する、請求項30に記載の車両の視覚支援装置。
【請求項32】
予想される前記走行状態の変化には、少なくとも、方向指示器の操作、シフトチェンジ、ハザードランプの点灯、アクセル操作、およびブレーキ操作の機器操作が含まれる、請求項30または請求項31のいずれか一項に記載の視覚支援装置。
【請求項33】
前記画像選択手段は、自動選択された画像を手動で取り消す画像取消スイッチをさらに備えており、
所定の場所における前記自動選択された画像が前記画像取消スイッチによって取消操作がなされ、この取消操作が所定回数を超えるとき、以後の自動選択を中止する、請求項30ないし請求項32のいずれか一項に記載の車両の視覚支援装置。
【請求項34】
前記表示形態は、手動で登録される請求項31に記載の車両の視覚支援装置。
【請求項35】
前記画像選択手段は、前記記憶手段に記憶された自動選択情報を手動で取り消す画像選択消去スイッチをさらに備える、請求項30ないし請求項33のいずれか一項に記載の車両の視覚支援装置。
【請求項36】
他車の前記道路の情報または/および前記走行状態が通信回線を介して取得される通信回線手段をさらに備え、
前記画像選択手段は、この他車の前記道路の情報または/および前記走行状態と前記自車の前記道路の情報または/および前記走行状態とに基づき、画像を自動選択する請求項1ないし請求項35のいずれか一項に記載の車両の視覚支援装置。
【請求項1】
車載された車両の視覚支援装置であって、
前記車両の周辺を撮像する複数の撮像手段と、
道路を走行している前記車両の、少なくとも現在位置および時刻を含む走行状態を検出する走行状態検出手段と、
少なくとも前記現在位置近傍を含み、前記車両の走行に関わる前記道路の情報が取得された、もしくは記憶された道路情報確認手段と、
前記撮像された画像を選択する画像選択手段と、
前記選択された画像を表示する表示手段と、を備え、
前記画像選択手段は、前記車両が前記現在位置から前記道路情報確認手段によって前記走行状態の変化が予想される変化予想地点へ移動しようとするときに、予想される前記走行状態の変化に応じて画像を自動選択する、車両の視覚支援装置。
【請求項2】
経路推定手段をさらに備え、
この経路推定手段は、前記走行状態検出手段によって検出された走行状態を記憶し、
この記憶された走行状態は、少なくとも位置と所定の時刻によって区切られた時間帯とを含み、前記所定の位置と前記時間帯とを関連づけされた走行状態記録となっており、
前記所定の位置と前記時間帯が略一致する前記走行状態記録が所定回数を超えるとき経路走行状態記録として記憶し、
前記車両の走行が前記経路走行状態記録に含まれている場合に、前記記憶された走行状態から前記車両の到着点およびこの到着点への経路を推定する、請求項1に記載の車両の視覚支援装置。
【請求項3】
前記画像選択手段は、画像選択スイッチを備えており、この画像選択スイッチを操作することによっても画像が手動選択され、
前記道路情報確認手段は、画像選択操作がなされたときに、手動選択された画像とこの画像選択操作の時刻および所定時間内の前記画像選択操作の頻度を記憶する記憶手段を備えており、
この記憶手段は、前記走行状態検出手段によって検出された前記画像選択操作がなされたときの位置も記憶する、請求項2に記載の車両の視覚支援装置。
【請求項4】
前記画像選択手段は、前記選択された画像の表示形態を複数備えており、
この表示形態は前記画像選択スイッチを操作することによって手動選択され、
前記記憶手段は、手動選択された前記表示形態を記憶する、請求項3に記載の車両の視覚支援装置。
【請求項5】
前記記憶手段は、所定の位置とそこで手動選択された所定の画像とを関連させた選択記録として記憶し、さらにこの選択記録が所定回数を超えて記憶された場合、前記所定の位置を前記変化予想地点として記憶し、
前記画像選択手段は、車両が前記変化予想地点を走行するとき、前記選択記録の画像と同じ視野で撮像された画像を自動選択する、請求項3または請求項4に記載の車両の視覚支援装置。
【請求項6】
前記経路推定手段によって推定された前記経路に前記変化予想地点があるとき、前記画像選択手段は、前記車両が前記変化予想地点を走行する所定距離前もしくは所定時間前に、予想される前記走行状態の変化に応じた画像を自動選択する、請求項2ないし請求項5のいずれか一項に記載の車両の視覚支援装置。
【請求項7】
地図情報が記憶された地図情報記憶手段をさらに備え、
前記変化予想地点は、記憶された前記地図情報において、少なくとも、右折もしくは左折する交差点、片側に複数の車線がある道路における車線変更の頻度が高い地点、複数の道路の合流地点、分岐地点、および自動車専用道路の退出点が含まれる、請求項6に記載の視覚支援装置。
【請求項8】
前記画像選択手段は、前記地図情報によって取得された地点における所定の時間帯での道路情報に基づいて、画像を自動選択する前記変化予想地点までの所定距離もしくは所定時間を設定する、請求項7に記載の視覚支援装置。
【請求項9】
予想される前記走行状態の変化には、少なくとも、方向指示器の操作、シフトチェンジ、ハザードランプの点灯、アクセル操作、およびブレーキ操作の機器操作が含まれる、請求項1ないし請求項8のいずれか一項に記載の視覚支援装置。
【請求項10】
前記画像選択手段は、前記機器操作がされたときに、画像を自動選択する、請求項9に記載の視覚支援装置。
【請求項11】
前記経路推定手段によって推定された前記経路に左折する交差点があるとき、前記画像選択手段は、前記変化予想地点として前記交差点を設定し、前記車両の左後側方の画像を自動選択する、請求項6ないし請求項10のいずれか一項に記載の車両の視覚支援装置。
【請求項12】
前記経路推定手段によって推定された到着点が鉄道の駅構内であるとき、前記画像選択手段は、前記変化予想地点として前記駅構内を設定し、前記車両の左前側方の画像を自動選択する、請求項6ないし請求項11のいずれか一項に記載の車両の視覚支援装置。
【請求項13】
前記経路推定手段によって推定された前記経路に学校があるとき、前記画像選択手段は、前記変化予想地点として前記学校と前記学校の近傍を設定し、前記車両の左後側方の画像を自動選択する、請求項6ないし請求項11のいずれか一項に記載の車両の視覚支援装置。
【請求項14】
道路交通情報通信システムをさらに備え、
前記経路推定手段によって推定された前記経路に通行規制された道路があると前記道路交通情報通信システムが検出したとき、前記画像選択手段は、前記変化予想地点として前記通行規制された道路を設定し、前記車両の左前側方の画像を自動選択する、請求項6ないし請求項11のいずれか一項に記載の車両の視覚支援装置。
【請求項15】
地図情報が記憶された地図情報記憶手段と、
この地図情報によって車両を出発点から指定された到着点への誘導経路に誘導する誘導手段と、をさらに備え、
前記道路情報確認手段は、記憶された前記地図情報と前記誘導経路を取得する、請求項1に記載の車両の視覚支援装置。
【請求項16】
前記表示手段は、前記地図情報と、前記選択された画像と、を並行して表示する、請求項15に記載の車両の視覚支援装置。
【請求項17】
前記誘導経路に前記変化予想地点があるとき、前記画像選択手段は、前記車両が前記変化予想地点を走行する所定距離前もしくは所定時間前に、予想される前記走行状態の変化に応じた画像を自動選択する、請求項15または請求項16に記載の車両の視覚支援装置。
【請求項18】
前記変化予想地点には、少なくとも、右折もしくは左折する交差点、片側に複数の車線がある道路における車線変更の頻度が高い地点、複数の道路の合流地点、分岐地点、および優先道路の退出点が含まれる、請求項17に記載の視覚支援装置。
【請求項19】
前記変化予想地点が、左折する交差点であるとき、前記画像選択手段は、前記車両の左後側方の画像を自動選択する請求項17または請求項18に記載の視覚支援装置。
【請求項20】
前記変化予想地点が優先道路からの退出点もしくは道路の分岐点であるとき、前記車両が左方向へ退出もしくは分岐する場合、前記画像選択手段は、前記車両の左後側方の画像を自動選択し、一方、前記車両が右方向へ退出もしくは分岐する場合、前記車両の右後側方の画像を自動選択する請求項17または請求項18に記載の車両の視覚支援装置。
【請求項21】
前記現在位置および前記地図情報に基づき、前記車両が走行している道路が片側に複数の走行車線を有しており、前記車両がいずれかの前記走行車線を走行しているかを検出する走行車線検出手段をさらに備え、
前記車両が走行している道路が優先道路であって、前記変化予想地点が、優先道路からの退出点もしくは道路の分岐点であり、前記車両がこの退出点で退出もしくはこの分岐点で分岐する場合、
前記退出点もしくは前記分岐点が前記優先道路の左側であり、前記車両が左端の車線以外を走行しているとき、前記画像選択手段は、前記車両の左後側方の画像を自動選択し、
一方、前記退出点もしくは前記分岐点が前記優先道路の右側であり、前記車両が右端の車線以外を走行しているとき、前記画像選択手段は、前記車両の右後側方の画像を自動選択する、請求項17または請求項18に記載の車両の視覚支援装置。
【請求項22】
前記現在位置および前記地図情報に基づき、前記車両が走行している道路が片側に複数の走行車線を有しており、前記車両がいずれかの前記走行車線を走行しているかを検出する走行車線検出手段をさらに備え、
前記車両が走行している道路が優先道路であって、前記変化予想地点が、優先道路からの退出点もしくは道路の分岐点であり、前記車両がこの退出点もしくはこの分岐点を通過する場合、
前記退出点もしくは前記分岐点が前記優先道路の左側であり、前記車両が右端の車線以外を走行しているとき、前記画像選択手段は、前記車両の右後側方の画像を自動選択し、
一方、前記退出点もしくは前記分岐点が前記優先道路の右側であり、前記車両が左端の車線以外を走行しているとき、前記画像選択手段は、前記車両の左後側方の画像を自動選択する、請求項17または請求項18に記載の車両の視覚支援装置。
【請求項23】
前記変化予想地点が、前記車両が走行している一の道路と他の道路とが合流する合流点であるとき、前記画像選択手段は、前記合流点が一の道路の左側である場合、前記車両の左後側方の画像を自動選択し、一方、前記合流点が一の道路の右側である場合、前記車両の右後側方の画像を自動選択する請求項17または請求項18に記載の車両の視覚支援装置。
【請求項24】
前記画像選択手段は、前記車両が前記変化予想地点を走行する所定距離前もしくは所定時間前に、予想される前記走行状態の変化に応じた画像を自動選択する、請求項15ないし請求項23のいずれか一項に記載の車両の視覚支援装置。
【請求項25】
予想される前記走行状態の変化には、少なくとも、方向指示器の操作、シフトチェンジ、ハザードランプの点灯、アクセル操作、およびブレーキ操作の機器操作が含まれる、請求項24に記載の視覚支援装置。
【請求項26】
前記画像選択手段は、前記機器操作がされたときに、画像を自動選択する、請求項25に記載の視覚支援装置。
【請求項27】
前記画像選択手段は、前記地図情報によって取得された地点における所定の時間帯での道路情報に基づいて、画像を自動選択する前記変化予想地点までの所定距離もしくは所定時間を設定する、請求項15ないし請求項17または請求項24ないし請求項26のいずれか一項に記載の視覚支援装置。
【請求項28】
前記誘導経路に学校もしくは商店街があるとき、前記画像選択手段は、前記変化予想地点として前記学校と前記学校の近傍もしくは前記商店街と前記商店街の近傍を設定し、前記車両の左後側方の画像を自動選択する、請求項15ないし請求項17または請求項24ないし請求項27のいずれか一項に記載の視覚支援装置。
【請求項29】
道路交通情報通信システムをさらに備え、
前記誘導経路に通行規制された道路があると前記道路交通情報通信システムが検出したとき、前記画像選択手段は、前記変化予想地点として前記通行規制された道路を設定し、前記車両の左前側方の画像を自動選択する、請求項15ないし請求項28のいずれか一項に記載の車両の視覚支援装置。
【請求項30】
前記画像選択手段は、画像を手動選択できる画像選択スイッチと、前記画像選択スイッチの前記手動選択された画像と前記手動選択がされたときの前記走行状態検出手段によって検出された走行状態とを記憶する記憶手段と、をさらに備え、
この記憶された走行状態は、少なくとも位置を含んでおり、
前記車両が所定の場所を走行しているとき、この所定の場所が前記記憶された走行状態に含まれており、前記車両の走行が所定の回数を超え、かつ、前記所定の場所における同じ撮像方向の画像の前記手動選択が所定の回数を超える場合に、前記画像選択手段は、この同じ撮像方向の画像を自動選択する、請求項1に記載の車両の視覚支援装置。
【請求項31】
前記画像選択手段は、前記選択された画像の表示形態を複数備えており、この表示形態も前記画像選択スイッチを操作することによって手動選択され、
前記記憶手段は、手動選択された前記表示形態を記憶し、
前記同じ撮像方向の画像が自動選択されるとき、同時に前記表示形態を自動選択する、請求項30に記載の車両の視覚支援装置。
【請求項32】
予想される前記走行状態の変化には、少なくとも、方向指示器の操作、シフトチェンジ、ハザードランプの点灯、アクセル操作、およびブレーキ操作の機器操作が含まれる、請求項30または請求項31のいずれか一項に記載の視覚支援装置。
【請求項33】
前記画像選択手段は、自動選択された画像を手動で取り消す画像取消スイッチをさらに備えており、
所定の場所における前記自動選択された画像が前記画像取消スイッチによって取消操作がなされ、この取消操作が所定回数を超えるとき、以後の自動選択を中止する、請求項30ないし請求項32のいずれか一項に記載の車両の視覚支援装置。
【請求項34】
前記表示形態は、手動で登録される請求項31に記載の車両の視覚支援装置。
【請求項35】
前記画像選択手段は、前記記憶手段に記憶された自動選択情報を手動で取り消す画像選択消去スイッチをさらに備える、請求項30ないし請求項33のいずれか一項に記載の車両の視覚支援装置。
【請求項36】
他車の前記道路の情報または/および前記走行状態が通信回線を介して取得される通信回線手段をさらに備え、
前記画像選択手段は、この他車の前記道路の情報または/および前記走行状態と前記自車の前記道路の情報または/および前記走行状態とに基づき、画像を自動選択する請求項1ないし請求項35のいずれか一項に記載の車両の視覚支援装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【公開番号】特開2010−49349(P2010−49349A)
【公開日】平成22年3月4日(2010.3.4)
【国際特許分類】
【出願番号】特願2008−210977(P2008−210977)
【出願日】平成20年8月19日(2008.8.19)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
【公開日】平成22年3月4日(2010.3.4)
【国際特許分類】
【出願日】平成20年8月19日(2008.8.19)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
[ Back to top ]