
車両の走行制御装置
【課題】道路に合わせて走行路を適切に学習し、確実且つ安定した自動操縦制御を行う。
【解決手段】ドライバが自動操縦制御のメインスイッチ11がONされ、自動操縦制御における目標車速が設定されて、基準局4との通信が確立され、自車両1の現在位置が過去に作成された走行路と略一致していても、自動操縦制御スイッチがONにされていない場合は、走行路の学習が行われる。走行路の学習は、現在の走行路が、過去に記憶した走行路に対する順方向路と逆方向路のどちらかであるかを判定し、この判定結果に基づき、順方向路と逆方向路をそれぞれ区別して学習させる。また、順方向路と逆方向路の判定は、基準局4と自車両1との通信が確立した際の基準局4と自車両1との距離がLc以下の場合に現在の走行路が順方向路と判定する。また、判定結果が逆方向路となった場合でも、順方向路に対する平均位置の誤差が閾値以内であれば順方向路として学習させる。
【解決手段】ドライバが自動操縦制御のメインスイッチ11がONされ、自動操縦制御における目標車速が設定されて、基準局4との通信が確立され、自車両1の現在位置が過去に作成された走行路と略一致していても、自動操縦制御スイッチがONにされていない場合は、走行路の学習が行われる。走行路の学習は、現在の走行路が、過去に記憶した走行路に対する順方向路と逆方向路のどちらかであるかを判定し、この判定結果に基づき、順方向路と逆方向路をそれぞれ区別して学習させる。また、順方向路と逆方向路の判定は、基準局4と自車両1との通信が確立した際の基準局4と自車両1との距離がLc以下の場合に現在の走行路が順方向路と判定する。また、判定結果が逆方向路となった場合でも、順方向路に対する平均位置の誤差が閾値以内であれば順方向路として学習させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、走行路を学習し、該学習した走行路を基に目標進行路を生成して、自車両を目標進行路に沿って自動操縦制御する車両の走行制御装置に関する。
【背景技術】
【0002】
近年、人工衛星から得られる位置データに基づいて車両の位置を検出するGPS(Global Positioning System)が、車両用のナビゲーション装置において広く用いられており、このGPSで検出した自車位置情報や、カメラ等により検出した前方の道路情報を基に走行制御する様々な技術が提案され、実用化されている。
【0003】
例えば、特開2001−255937号公報では、車載用ナビゲーションシステムで、ドライバが目的地を設定し、このナビゲーションシステムにより生成される目的地までの経路を目標進行路として自動操舵や自動加減速により自動操縦制御する技術が開示されている。
【特許文献1】特開2001−255937号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところで、上述の特許文献1に開示されるような先行技術では、ドライバにより設定される目標進行路が長くなると、途中に交差点や分岐路が介在し、自動操縦制御が複雑化してしまうという問題がある。また、目的地に対してドライバが走行し易いと考える経路と、ナビゲーションシステムにより設定される経路とが必ずしも一致するわけではないため、ドライバが使いにくく感じてしまうという課題もある。このため、自車両の走行路を学習し、この学習した走行路を目標進行路とすることも考えられるが、例えばセンターラインが無い程度の幅の走行路で微妙に中央左寄りを走行するような場合においても、走行路の略中央を目標進行路として学習してしまい、自動操縦制御に適さないという課題がある。
【0005】
本発明は上記事情に鑑みてなされたもので、道路に合わせて走行路を適切に学習し、確実、且つ、安定した自動操縦制御ができる車両の走行制御装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明は、予め位置が求められた位置に選択的に設定し、衛星からの情報を基に補正情報を算出する基準局と、車両に搭載され、上記衛星からの情報に基づき車両位置を演算する移動局と、上記基準局と上記移動局との通信が確立した際に、上記基準局の情報と上記車両位置とから該車両位置を補正演算する車両位置演算手段と、上記自車両が走行する走行路を記憶する走行路記憶手段と、現在の自車位置が上記走行路記憶手段で過去に記憶した走行路と略一致すると判定した場合に、現在の走行路が、過去に記憶した走行路に対する順方向路と逆方向路のどちらかであるかを判定する走行路判定手段と、上記走行路判定手段による判定結果に基づいて、上記順方向路と上記逆方向路をそれぞれ区別して学習させる走行路学習手段とを備えたことを特徴としている。
【発明の効果】
【0007】
本発明による車両の走行制御装置は、道路に合わせて走行路を適切に学習し、確実、且つ、安定した自動操縦制御が可能となる。
【発明を実施するための最良の形態】
【0008】
以下、図面に基づいて本発明の実施の形態を説明する。
図1〜図7は本発明の実施の形態を示し、図1は車両の走行制御装置の全体を示す概略説明図、図2は自動操縦制御のメインプログラムのフローチャート、図3は自動操縦制御の自動操舵のフローチャート、図4はルート学習処理ルーチンのフローチャート、図5は図4とは異なるルート学習処理ルーチンの例を示すフローチャート、図6は基準局の周辺の通信可能領域及び移動局の順方向と逆方向の判定の説明図、図7は自動操舵の原理の説明図、図8は逆方向路と順方向路の説明図である。
【0009】
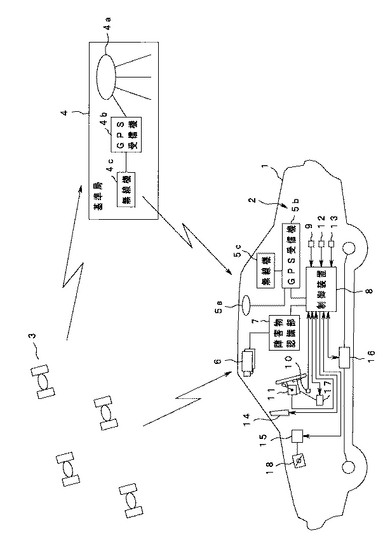
図1において、符号1は移動局としての自動車等の車両(自車両)を示し、この自車両1には、RTK(Real-Time Kinematic)−GPSを用いて制御を行う走行制御装置2が搭載されている。
【0010】
すなわち、本実施形態におけるRTK−GPSでは、地球を周回する人工衛星(GPS衛星)3からの情報(測位計算等に必要な衛星の軌道情報をはじめとするデータ等)は、使用者が自宅等に選択的に設定する基準局4と、移動局である自車両1により受信される。
【0011】
基準局4は、予め位置が正確に求められている自宅等の地点に設けられており、GPSアンテナ4a、GPS受信機4b、無線機4cを備えて主要に構成されている。そして、この基準局4で観測したGPS衛星3からの電波の位相情報、疑似距離、及び、基準局4の位置座標を、測位する地点、すなわち、移動局である自車両1に無線機4cにより送信する。基準局4からは、具体的には、誤差補正量、疑似距離補正量、座標値等のデータ等が自車両1に対して送信される。
【0012】
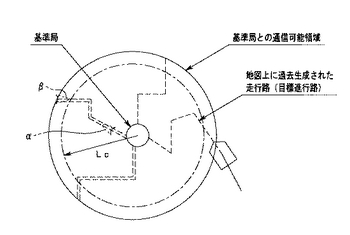
ここで、無線機4cは、例えば、IEEE802.11a/b/g等の規格による無線LAN(Local Area Network)に基づき送受信するアクセスポイントであり、通信のセキュリティを維持するためSSID(Service Set ID)、WEP(Wired Equivalent Privacy)キー、MAC(Media Access Control)アドレス認証の設定が特有になされている。そして、図6に示すように、この無線機4cを中心として、半径約数10m以内の領域が、通信可能領域として設定される。
【0013】
移動局である自車両1には、GPSアンテナ5a、GPS受信機5b、無線機5cが搭載されている。そして、自車両1が上述の基準局4との通信可能領域に入り、基準局4との通信が確立された際に、基準局4からの誤差補正量、疑似距離補正量、座標値等のデータ(無線機5cで受信されるデータ)や、自車両1で受信したGPS衛星3からの情報をGPS受信機5b内で比較解析して、自車位置(座標値)を即座に精度良く(例えば、誤差1〜5cm)得られるようになっている。
【0014】
また、自車両1には、上述のGPS受信機5bが接続されて自車位置が入力され、また、ステレオカメラ6で撮像した画像を基に前方の道路環境を認識して前方障害物を認識する障害物認識部7が接続される制御装置8が搭載されている。
【0015】
ステレオカメラ6は、ステレオ光学系として例えば電荷結合素子(CCD)等の固体撮像素子を用いた1組の(左右の)CCDカメラで構成され、車外の対象を異なる視点からステレオ撮像し、障害物認識部7に入力する。
【0016】
障害物認識部7における、ステレオカメラ6からの画像の処理は、例えば以下のように行われる。まず、ステレオカメラ6のCCDカメラで撮像した自車両1の進入方向の環境の1組のステレオ画像対に対し、対応する位置のずれ量から三角測量の原理によって距離情報を求める処理を行なって、三次元の距離分布を表す距離画像を生成する。そして、このデータを基に、周知のグルーピング処理や、予め記憶しておいた3次元的な道路形状データ、側壁データ、立体物データ等と比較し、白線データ、道路に沿って存在するガードレール、縁石等の側壁データ、車両等の立体物データを抽出する。こうして抽出された立体物データの中から自車進行路の領域(例えば、自車進行方向に予め設定する幅で延長した領域や前方白線・側壁間に挟まれる領域)上に存在する立体物データが障害物として検出され制御装置8に入力される。
【0017】
制御装置8には、上述のGPS受信機5b、障害物認識部7の他、車速Vを検出する車速センサ9、ハンドル角θHを検出するハンドル角センサ10等のセンサ類と自動操縦制御のメインスイッチ11、ブレーキペダルスイッチ12、アクセルペダルスイッチ13等のスイッチ類が接続されている。
【0018】
また、制御装置8には、図示しないハードディスク、内蔵メモリ、或いは、CD、DVD等の読み込み書き込み自在な記憶メディアが搭載されており、基準局4との通信が可能な領域における地図の生成と、過去に生成した地図情報の読み込みが可能になっている。そして、この地図情報は、例えばダッシュボード上に設けられた液晶ディスプレイ14に適宜表示され、基準局4位置と、自車両1の現在位置と、自動操縦により誘導される走行路(目標進行路:ノード列で与えられる)、過去に生成した走行路(ノード列)、或いは、現在生成している走行路(ノード列)が表示される。尚、これら各ノード列は、自車両1が進行していく方向に、予め定める規則性として、例えば、昇順のナンバーが各ノード情報として与えられる。
【0019】
また、自車両1の制御装置8には、自動操縦制御を実行するアクチュエータとして、電動スロットル弁制御装置15、ブレーキ制御装置16、及び、電動パワーステアリング制御装置17が接続されている。
【0020】
そして、ドライバが自動操縦制御のメインスイッチ11をONし、自動操縦制御における目標車速が設定されると、後述の図2に示す自動操縦制御のプログラムに従って、基準局4との通信が確立されて、自車両1の現在位置が過去に作成された走行路と略一致し(例えば予め設定した±2m以内の領域に存在する)、更に、メインスイッチ11のONで操作可能となる自動操縦制御スイッチ(図示せず)がONにされている場合には、この一致している走行路を目標進行路として自動操縦制御する。具体的には、目標車速を維持するように、電動スロットル弁制御装置15に信号を出力してスロットル弁18を駆動させ、加速、或いは、減速を実行させる。また、所定以上の大きな減速を行わせる際には、ブレーキ制御装置16に信号を出力して自動ブレーキを作動させる。また、進行方向を変える場合には、後述の図3に示す自動操舵のプログラムに従って電動パワーステアリング制御装置17に信号出力して自動操舵を実行する。
【0021】
また、ドライバが自動操縦制御のメインスイッチ11がONされ、自動操縦制御における目標車速が設定されて、基準局4との通信が確立され、自車両1の現在位置が過去に作成された走行路と略一致していても、自動操縦制御スイッチがONにされていない場合には、後述の図4或いは図5に示すルート学習処理ルーチンのフローチャートに従って走行路の学習が行われる。
【0022】
この走行路の学習は、具体的には、現在の走行路が、過去に記憶した走行路に対する順方向路と逆方向路のどちらかであるかを判定し、この判定結果に基づいて、順方向路と逆方向路をそれぞれ区別して学習させるものである。
【0023】
この際、順方向路と逆方向路の判定は、本実施の形態の図4に示すフローチャートの例においては、基準局4と移動局である自車両1との通信が確立した際の、基準局4と自車両1との距離が予め設定しておいた距離Lc(例えば10m)以下の場合に現在の走行路が順方向路と判定する。従って、図6に示すように、基準局4の側から領域外側に向かう基準局4に近い車両αが順方向路を走行していると判定され、領域外から基準局4に向かう基準局4から遠い車両βが逆方向路を走行していると判定される。尚、本実施の形態で説明する順方向と逆方向は、あくまでも命名の一例にすぎず、基準局4と移動局である自車両1との通信が確立した際の、基準局4と自車両1との距離が予め設定しておいた距離Lc(例えば10m)以下の場合に現在の走行路が逆方向路と判定するように定義しても良い。
【0024】
また、本実施の形態の図5に示すフローチャートの例においては、自車両1の現在位置に最も近い走行路のノードの番号が自車両1の進行方向に向かって昇順の場合に現在の走行路が順方向路と判定する。
【0025】
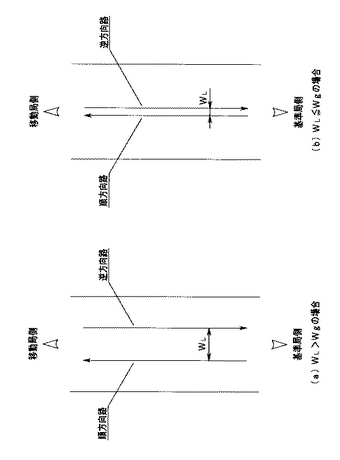
また、本実施の形態においては、今回の走行路に対する判定結果が逆方向路となった場合であっても、過去に学習し記憶しておいた順方向路に対する平均位置の誤差WLが予め設定しておいた閾値Wg(例えば1m)以内であれば、今回の走行路を順方向路として学習させるようになっている。すなわち、図8(b)に示すように、順方向路と逆方向路とが予め設定しておいた閾値Wg以下に設定されるのであれば、常に自車両1は走行路の中央等の同じ位置を走行するものとして判断できるため、順方向と逆方向とで区別して学習する必要がない。ここで、平均位置の誤差WLについて説明すると、これは、順方向路を形成するノード点列と、逆方向路を形成するノード点列において、両ノード点列のうち道路幅方向における位置のずれ量の平均値、詳細には、両ノード点列のうちノード点の総数の少ない方を基準として、基準とするノード点列の各ノード点に対して、これに隣接する他方のノード点列のノード点をそれぞれ選択し、これらノード点間における道路幅方向における距離(ズレ量)の平均を算出して、これを平均位置の誤差WLとする。
【0026】
このように、制御装置8は、車両位置演算手段、走行路記憶手段、走行路判定手段、及び、走行路学習手段の機能を有して構成されている。
【0027】
一方、制御装置8は、基準局4との通信が確立されていても、自車両1の現在位置が過去に作成された走行路と略一致していない場合には、自動操縦するのではなく、現在の自車位置から連続して形成する自車両の走行路を図示しないハードディスク、内蔵メモリ、或いは、CD、DVD等の読み込み書き込み自在な記憶メディアに新たに記憶させる。
【0028】
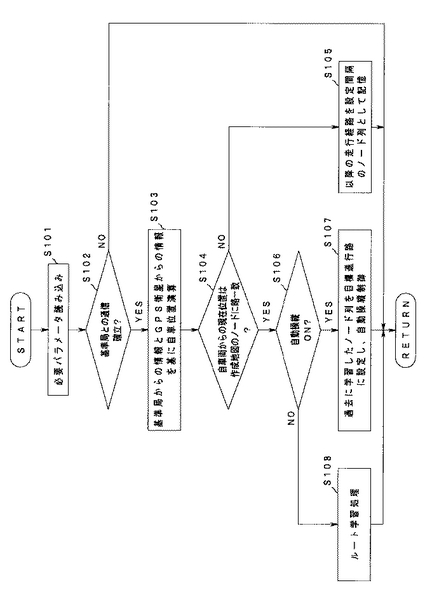
次に、図2のフローチャートにより、走行制御装置2における自動操縦制御のプログラムを説明する。この図2のフローチャートは、自動操縦制御のメインスイッチ11がONされ、目標速度が設定されると、所定時間毎に実行されるプログラムで、まず、ステップ(以下、「S」と略称)101で必要なパラメータの読み込みが行われる。
【0029】
次いで、S102に進み、自車両1が基準局4との通信可能領域に入り、移動局である自車両1と基準局4との間で通信が確立されているか否か判定し、通信が確立されていない場合には、そのままプログラムを抜ける。逆に、通信が確立されている場合には、S103に進み、GPS受信機5bで基準局4からの情報とGPS衛星3からの情報を基に自車位置を演算し、S104へと進む。
【0030】
S104では、自車両1の現在位置が、過去に作成した、図示しないハードディスク、内蔵メモリ、或いは、CD、DVD等の読み込み書き込み自在な記憶メディアの地図のノードと略一致するか(例えば、現在位置から±2m以内に過去のノードが存在するか)否か判定する。
【0031】
S104の判定の結果、自車両1の現在位置が過去に作成したノードに略一致しないと判定した場合には、S105に進み、以降の走行経路を設定間隔(例えば、3〜5m間隔)のノード列として、図示しないハードディスク、内蔵メモリ、或いは、CD、DVD等の読み込み書き込み自在な記憶メディアに記憶する。この際、この新たなノード列の記憶は、一定時間(例えば、15分)、一定距離(例えば、300m)で制限し、この制限を超えても目標に到達できない場合は、今回記憶してきたノード列を全て消去する。すなわち、この制限を超える場合は、自車両1が目標に向かうことなく停車した、或いは、目標に辿り着こうとしていないと判断できるからである。また、途中で基準局4との通信が途切れるような場合においても、正確な走行路の生成ができないので、今回記憶してきたノード列を全て消去する。尚、過去に記憶された走行路は、ドライバにより適宜消去できるようになっている。
【0032】
一方、S104の判定の結果、自車両1の現在位置が過去に作成したノードに略一致すると判定した場合には、S106に進み、自動操縦制御スイッチがONか否か判定し、自動操縦制御スイッチがONの場合には、S107に進んで、その一致した過去に記憶したノード列を目標進行路に設定し、上述の如く自動操縦制御して、プログラムを抜ける。尚、この自動操縦制御では、例えば障害物認識部7により前方10m以内に障害物が検出されたとき、ドライバが大きくステアリング操作した場合、ブレーキペダル、アクセルペダルを踏んだとき、或いは、自動操縦制御のメインスイッチ11をOFFにした場合にはキャンセルする。
【0033】
逆に、S106で自動操縦制御スイッチがOFFと判定した場合には、S108に進んで、記憶されている走行路の学習(ルート学習処理)を実行してプログラムを抜ける。
【0034】
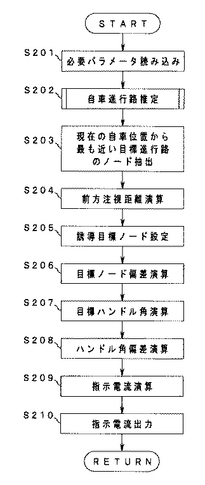
次に、制御装置8における上述の自動操縦制御のS107で実行される、特に自動操舵について、図3のフローチャート及び図7の自動操舵の原理の説明図を用いて説明する。まず、S201で必要なパラメータの読み込みが行われる。
【0035】
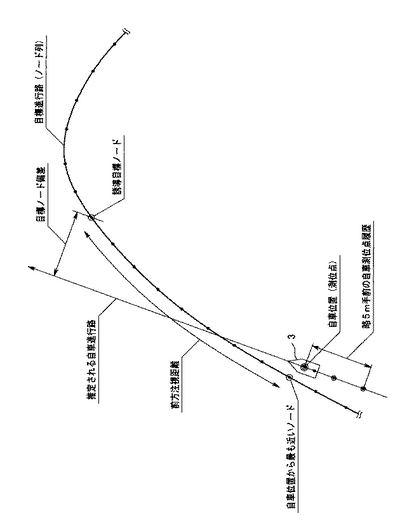
次に、S202に進み、自車位置の過去の履歴の中から、例えば、現在位置より略車長長さ(例えば、5m)手前の自車測位点履歴を抽出し、この5m手前の自車測位点と現在の自車位置とを結んで得られる前方への直線方向を自車進行路として推定する。
【0036】
次いで、S203に進み、現在の自車位置から最も近い、目標進行路のノードを抽出する。
【0037】
その後、S204に進み、現在の自車速と、予め設定しておいた前方注視時間(例えば、1.5秒)より、前方注視距離を求める。例えば、現在の自車速が20km/hの場合は、前方注視距離は、5.56m・1.5秒=8.34m。
【0038】
次いで、S205に進み、S204で求めた前方注視距離近傍の目標進行路上のノードを誘導目標ノードとして設定する。
【0039】
次に、S206に進み、誘導目標ノードと自車進行路からの横方向のずれ量を目標ノード偏差ΔDとして演算する。
【0040】
次いで、S207に進み、目標ノード偏差ΔDをゼロにするように目標ハンドル角δhを以下の(1)式により算出する。
δh=Gp・ΔD+Gd・(d(ΔD)/dt) …(1)
ここで、Gpは比例項ゲインであり、Gdは微分項ゲインである。
【0041】
次に、S208に進み、目標ハンドル角δhとハンドル角センサ10で検出した実際のハンドル角θHとからハンドル角偏差Δδ(=δh−θH)を演算する。
【0042】
次いで、S209に進み、以下の(2)式によりハンドル角偏差Δδをゼロにするように、電動パワーステアリング制御装置17における電動パワーステアリングモータの指示電流Iδを演算し、S210で、この指示電流Iδを出力してプログラムを抜ける。
Iδ=Kp・Δδ+Kd・(d(Δδ)/dt)+Ki・∫Δδdt …(2)
ここで、Kpは比例項ゲイン、Kdは微分項ゲイン、Kiは積分項ゲインである。
【0043】
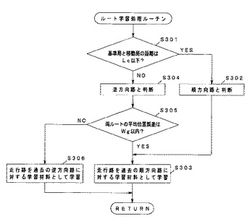
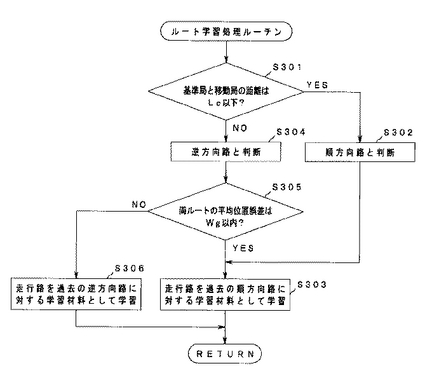
次に、制御装置8における上述の自動操縦制御のS108で実行される、ルート学習処理について、図4のフローチャートを用いて説明する。
まず、S301で基準局4と自車両1との距離が予め設定しておいた距離Lc(例えば10m)以下か否か判定される。
【0044】
このS301の判定の結果、基準局4と自車両1との距離がLc以下と判定された場合は、S302に進み、自車両1は順方向路を走行中と判定し、S303に進んで、今回得られた走行路を過去の順方向路に対する学習材料として学習し、ルーチンを抜ける。
【0045】
また、S301の判定の結果、基準局4と自車両1との距離がLcを超えていると判定した場合はS304に進み、自車両1は逆方向路を走行中と判定し、S305に進む。
【0046】
S305では、今回、S304で逆方向路と判定された走行路と過去に学習し記憶しておいた順方向路とを比較して両ルートの平均位置の誤差が予め設定しておいた閾値Wg(例えば1m)以内か否か判定される。
【0047】
このS305の判定の結果、両ルートの平均位置の誤差が予め設定しておいた閾値Wg以内であれば、前述したように順方向と逆方向とで区別して学習する必要がないと判断できるため、S303に進んで、今回得られた走行路を過去の順方向路に対する学習材料として学習し、ルーチンを抜ける。
【0048】
逆に、S305の判定の結果、両ルートの平均位置の誤差が予め設定しておいた閾値Wgを超えている場合は、順方向路と逆方向路とで分けて学習する必要があるため、S306に進んで、走行路を過去の逆方向路に対する学習材料として学習し、ルーチンを抜ける。尚、この場合、逆方向路として学習するのではなく、新たな走行路として認識して学習するようにしても良い。
【0049】
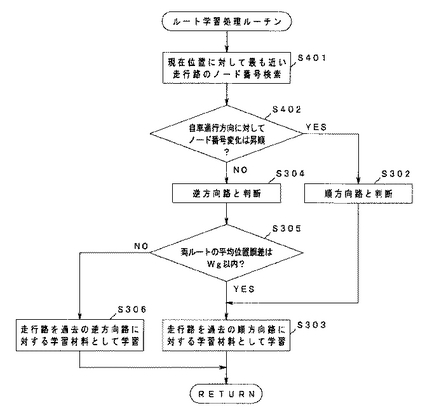
一方、制御装置8における上述の自動操縦制御のS108で実行される、ルート学習処理は、図5に示すフローチャートに示すような処理にて実行するようにしても良い。
【0050】
まず、S401では、現在位置に対して最も近い走行路のノード番号を検索する。
【0051】
その後、S402に進み、自車進行方向に対して走行路のノード番号の変化が昇順か否か判定する。そして、この判定の結果、昇順であればS302に進み、現在の走行路は順方向路と判定し、昇順でなければS304に進んで、現在の走行路は逆方向路と判定する。S302以降の処理は、図4の説明と同様であるので省略する。
【0052】
このように本実施の形態によれば、基準局4は自宅等、使用者が好みの場所に選択的に設定できるので、利便性が良い。
【0053】
また、基準局4の周りにおいてのみ自動操縦制御するようになっているので、長い距離で目標進行路を設定して、途中に交差点等が存在し、自動操縦制御が実際には困難になるという問題がなく利便性が高い。
【0054】
更に、基準局4の周りにおいて、ドライバが実際に走行した走行路を以後の目標進行路として設定するようになっているので、ドライバの意図する経路で自動操縦制御が行われ、使いやすい。
【0055】
また、基準局4の周辺領域でドライバが実際に走行した走行路が細かく設定されるので、基準局4の周辺領域内で道路工事等や交通法規の変更があっても、これを即座に反映した走行経路を目標進行路に設定して自動操縦制御を実行することが可能である。
【0056】
更に、自動操縦制御は、障害物が検出されるとキャンセルされるので、十分な安全性を有している。更に、ドライバのブレーキペダル操作、アクセルペダル操作、ステアリング操作により、自動操縦制御がキャンセルされるので、ドライバの運転意思を十分に反映して安全で使いやすい自動操縦制御となっている。
【0057】
また、本実施の形態によれば、同じ走行路においても、順方向路と逆方向路とを別ルートとして学習できるようになっているため、中央左寄りを走行する場合においても、自動操縦制御で正確にこれを再現でき、確実、且つ、安定した自動操縦制御が可能となる。
【0058】
尚、本発明の実施の形態では、障害物検出手段は、ステレオカメラ6にて撮影した画像を基に認識するようになっているが、他の装置、例えば、超音波センサ等で検出するようにしても良い。
【0059】
また、本発明の実施の形態では、目標進行路は過去に走行した走行経路の中から選択されるようになっているが、ドライバが自分でメモリ上に好みの走行経路を記憶できるようにしても良い。
【0060】
また、本発明の実施の形態では、基準局4からは、一般的な無線LANの規格により自車両1に各情報を送信するようになっているが、情報を無線送信できるものであれば、これに限ることなく、所謂、Bluetooth規格による無線で実現し、公知の携帯電話、携帯端末、PDA(Personal Digital Assistant)等の無線装置で情報伝達を行えるようにしても良い。
【0061】
更に、本発明の実施の形態においては、基準局4からは、自車両1の自車位置を求める為の補正情報のみを送信するようにしているが、この情報以外に他の情報を送信するようにしても良い。例えば、基準局4が自宅に設定されるものであれば、自宅のセキュリティ情報(侵入警報の状態、火災警報の状態)や、電灯やテレビ、パーソナルコンピュータの動作状態(ホームエレクトロニクス情報)、帰宅している人の信号(それぞれの帰宅した人が帰宅時にON、外出時にOFFする信号)等を送信するようにしても良い。
【0062】
また、基準局4を車両のサービス拠点等に設定する場合は、そのサービス拠点で行っているサービス情報や、宣伝情報を送信し、サービスの効率の向上を図ることが可能となる。また、サービス拠点近傍に車両が到達すれば、その車両は迷うことなく、サービス拠点に到着することができるので、サービス性の大きな向上につながる。そして、このようなサービス拠点では、サービス拠点までの走行経路を書き込ませた安価なCD、DVD等の記憶メディアを多くの利用者に配ることにより、サービス販売の一層の利益向上につなげることができる。
【0063】
また、本発明の実施の形態では、基準局4周辺の走行路情報を記憶する機能は、自車両1の制御装置8に設けるようにしているが、基準局4側に配設するようにしても良い。
【0064】
また、本発明の実施の形態では、基準局を自宅等に設定したがこれに限定されるものでなく、基準局を所定敷地内、例えば、工場又は駐車場内等に設置し、所定敷地内にて通信を確立させ、確立させた以降における所定敷地内での車両の走行制御に適用することも可能である。
【0065】
また、本実施形態では、制御装置8により測位される自車位置に基づいて走行ルートを取得する構成について説明したが、これに限定されず、移動局による衛星からの情報に基づく車両位置を基準局側に送信し、基準局4にて、基準局の情報と車両位置とに基づいて車両位置を演算する構成とすることができる。すなわち、基準局4側に車両位置演算手段を設けても良い。この場合には、走行ルート等の情報を基準局側にて蓄積することが可能となる。
【0066】
尚、基準局4ではなく、基準局とは別局にて基準局及び移動局からの情報を受信して車両位置及び走行ルート等の情報を蓄積することも可能である。
【図面の簡単な説明】
【0067】
【図1】車両の走行制御装置の全体を示す概略説明図
【図2】自動操縦制御のメインプログラムのフローチャート
【図3】自動操縦制御の自動操舵のフローチャート
【図4】ルート学習処理ルーチンのフローチャート
【図5】図4とは異なるルート学習処理ルーチンの例を示すフローチャート
【図6】基準局の周辺の通信可能領域及び移動局の順方向と逆方向の判定の説明図
【図7】自動操舵の原理の説明図
【図8】逆方向路と順方向路の説明図
【符号の説明】
【0068】
1 自車両(移動局)
2 走行制御装置
3 GPS衛星
4 基準局
4a GPSアンテナ
4b GPS受信機
4c 無線機
5a GPSアンテナ
5b GPS受信機
5c 無線機
8 制御装置(車両位置演算手段、走行路記憶手段、走行路判定手段、走行路学習手段)
【技術分野】
【0001】
本発明は、走行路を学習し、該学習した走行路を基に目標進行路を生成して、自車両を目標進行路に沿って自動操縦制御する車両の走行制御装置に関する。
【背景技術】
【0002】
近年、人工衛星から得られる位置データに基づいて車両の位置を検出するGPS(Global Positioning System)が、車両用のナビゲーション装置において広く用いられており、このGPSで検出した自車位置情報や、カメラ等により検出した前方の道路情報を基に走行制御する様々な技術が提案され、実用化されている。
【0003】
例えば、特開2001−255937号公報では、車載用ナビゲーションシステムで、ドライバが目的地を設定し、このナビゲーションシステムにより生成される目的地までの経路を目標進行路として自動操舵や自動加減速により自動操縦制御する技術が開示されている。
【特許文献1】特開2001−255937号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところで、上述の特許文献1に開示されるような先行技術では、ドライバにより設定される目標進行路が長くなると、途中に交差点や分岐路が介在し、自動操縦制御が複雑化してしまうという問題がある。また、目的地に対してドライバが走行し易いと考える経路と、ナビゲーションシステムにより設定される経路とが必ずしも一致するわけではないため、ドライバが使いにくく感じてしまうという課題もある。このため、自車両の走行路を学習し、この学習した走行路を目標進行路とすることも考えられるが、例えばセンターラインが無い程度の幅の走行路で微妙に中央左寄りを走行するような場合においても、走行路の略中央を目標進行路として学習してしまい、自動操縦制御に適さないという課題がある。
【0005】
本発明は上記事情に鑑みてなされたもので、道路に合わせて走行路を適切に学習し、確実、且つ、安定した自動操縦制御ができる車両の走行制御装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明は、予め位置が求められた位置に選択的に設定し、衛星からの情報を基に補正情報を算出する基準局と、車両に搭載され、上記衛星からの情報に基づき車両位置を演算する移動局と、上記基準局と上記移動局との通信が確立した際に、上記基準局の情報と上記車両位置とから該車両位置を補正演算する車両位置演算手段と、上記自車両が走行する走行路を記憶する走行路記憶手段と、現在の自車位置が上記走行路記憶手段で過去に記憶した走行路と略一致すると判定した場合に、現在の走行路が、過去に記憶した走行路に対する順方向路と逆方向路のどちらかであるかを判定する走行路判定手段と、上記走行路判定手段による判定結果に基づいて、上記順方向路と上記逆方向路をそれぞれ区別して学習させる走行路学習手段とを備えたことを特徴としている。
【発明の効果】
【0007】
本発明による車両の走行制御装置は、道路に合わせて走行路を適切に学習し、確実、且つ、安定した自動操縦制御が可能となる。
【発明を実施するための最良の形態】
【0008】
以下、図面に基づいて本発明の実施の形態を説明する。
図1〜図7は本発明の実施の形態を示し、図1は車両の走行制御装置の全体を示す概略説明図、図2は自動操縦制御のメインプログラムのフローチャート、図3は自動操縦制御の自動操舵のフローチャート、図4はルート学習処理ルーチンのフローチャート、図5は図4とは異なるルート学習処理ルーチンの例を示すフローチャート、図6は基準局の周辺の通信可能領域及び移動局の順方向と逆方向の判定の説明図、図7は自動操舵の原理の説明図、図8は逆方向路と順方向路の説明図である。
【0009】
図1において、符号1は移動局としての自動車等の車両(自車両)を示し、この自車両1には、RTK(Real-Time Kinematic)−GPSを用いて制御を行う走行制御装置2が搭載されている。
【0010】
すなわち、本実施形態におけるRTK−GPSでは、地球を周回する人工衛星(GPS衛星)3からの情報(測位計算等に必要な衛星の軌道情報をはじめとするデータ等)は、使用者が自宅等に選択的に設定する基準局4と、移動局である自車両1により受信される。
【0011】
基準局4は、予め位置が正確に求められている自宅等の地点に設けられており、GPSアンテナ4a、GPS受信機4b、無線機4cを備えて主要に構成されている。そして、この基準局4で観測したGPS衛星3からの電波の位相情報、疑似距離、及び、基準局4の位置座標を、測位する地点、すなわち、移動局である自車両1に無線機4cにより送信する。基準局4からは、具体的には、誤差補正量、疑似距離補正量、座標値等のデータ等が自車両1に対して送信される。
【0012】
ここで、無線機4cは、例えば、IEEE802.11a/b/g等の規格による無線LAN(Local Area Network)に基づき送受信するアクセスポイントであり、通信のセキュリティを維持するためSSID(Service Set ID)、WEP(Wired Equivalent Privacy)キー、MAC(Media Access Control)アドレス認証の設定が特有になされている。そして、図6に示すように、この無線機4cを中心として、半径約数10m以内の領域が、通信可能領域として設定される。
【0013】
移動局である自車両1には、GPSアンテナ5a、GPS受信機5b、無線機5cが搭載されている。そして、自車両1が上述の基準局4との通信可能領域に入り、基準局4との通信が確立された際に、基準局4からの誤差補正量、疑似距離補正量、座標値等のデータ(無線機5cで受信されるデータ)や、自車両1で受信したGPS衛星3からの情報をGPS受信機5b内で比較解析して、自車位置(座標値)を即座に精度良く(例えば、誤差1〜5cm)得られるようになっている。
【0014】
また、自車両1には、上述のGPS受信機5bが接続されて自車位置が入力され、また、ステレオカメラ6で撮像した画像を基に前方の道路環境を認識して前方障害物を認識する障害物認識部7が接続される制御装置8が搭載されている。
【0015】
ステレオカメラ6は、ステレオ光学系として例えば電荷結合素子(CCD)等の固体撮像素子を用いた1組の(左右の)CCDカメラで構成され、車外の対象を異なる視点からステレオ撮像し、障害物認識部7に入力する。
【0016】
障害物認識部7における、ステレオカメラ6からの画像の処理は、例えば以下のように行われる。まず、ステレオカメラ6のCCDカメラで撮像した自車両1の進入方向の環境の1組のステレオ画像対に対し、対応する位置のずれ量から三角測量の原理によって距離情報を求める処理を行なって、三次元の距離分布を表す距離画像を生成する。そして、このデータを基に、周知のグルーピング処理や、予め記憶しておいた3次元的な道路形状データ、側壁データ、立体物データ等と比較し、白線データ、道路に沿って存在するガードレール、縁石等の側壁データ、車両等の立体物データを抽出する。こうして抽出された立体物データの中から自車進行路の領域(例えば、自車進行方向に予め設定する幅で延長した領域や前方白線・側壁間に挟まれる領域)上に存在する立体物データが障害物として検出され制御装置8に入力される。
【0017】
制御装置8には、上述のGPS受信機5b、障害物認識部7の他、車速Vを検出する車速センサ9、ハンドル角θHを検出するハンドル角センサ10等のセンサ類と自動操縦制御のメインスイッチ11、ブレーキペダルスイッチ12、アクセルペダルスイッチ13等のスイッチ類が接続されている。
【0018】
また、制御装置8には、図示しないハードディスク、内蔵メモリ、或いは、CD、DVD等の読み込み書き込み自在な記憶メディアが搭載されており、基準局4との通信が可能な領域における地図の生成と、過去に生成した地図情報の読み込みが可能になっている。そして、この地図情報は、例えばダッシュボード上に設けられた液晶ディスプレイ14に適宜表示され、基準局4位置と、自車両1の現在位置と、自動操縦により誘導される走行路(目標進行路:ノード列で与えられる)、過去に生成した走行路(ノード列)、或いは、現在生成している走行路(ノード列)が表示される。尚、これら各ノード列は、自車両1が進行していく方向に、予め定める規則性として、例えば、昇順のナンバーが各ノード情報として与えられる。
【0019】
また、自車両1の制御装置8には、自動操縦制御を実行するアクチュエータとして、電動スロットル弁制御装置15、ブレーキ制御装置16、及び、電動パワーステアリング制御装置17が接続されている。
【0020】
そして、ドライバが自動操縦制御のメインスイッチ11をONし、自動操縦制御における目標車速が設定されると、後述の図2に示す自動操縦制御のプログラムに従って、基準局4との通信が確立されて、自車両1の現在位置が過去に作成された走行路と略一致し(例えば予め設定した±2m以内の領域に存在する)、更に、メインスイッチ11のONで操作可能となる自動操縦制御スイッチ(図示せず)がONにされている場合には、この一致している走行路を目標進行路として自動操縦制御する。具体的には、目標車速を維持するように、電動スロットル弁制御装置15に信号を出力してスロットル弁18を駆動させ、加速、或いは、減速を実行させる。また、所定以上の大きな減速を行わせる際には、ブレーキ制御装置16に信号を出力して自動ブレーキを作動させる。また、進行方向を変える場合には、後述の図3に示す自動操舵のプログラムに従って電動パワーステアリング制御装置17に信号出力して自動操舵を実行する。
【0021】
また、ドライバが自動操縦制御のメインスイッチ11がONされ、自動操縦制御における目標車速が設定されて、基準局4との通信が確立され、自車両1の現在位置が過去に作成された走行路と略一致していても、自動操縦制御スイッチがONにされていない場合には、後述の図4或いは図5に示すルート学習処理ルーチンのフローチャートに従って走行路の学習が行われる。
【0022】
この走行路の学習は、具体的には、現在の走行路が、過去に記憶した走行路に対する順方向路と逆方向路のどちらかであるかを判定し、この判定結果に基づいて、順方向路と逆方向路をそれぞれ区別して学習させるものである。
【0023】
この際、順方向路と逆方向路の判定は、本実施の形態の図4に示すフローチャートの例においては、基準局4と移動局である自車両1との通信が確立した際の、基準局4と自車両1との距離が予め設定しておいた距離Lc(例えば10m)以下の場合に現在の走行路が順方向路と判定する。従って、図6に示すように、基準局4の側から領域外側に向かう基準局4に近い車両αが順方向路を走行していると判定され、領域外から基準局4に向かう基準局4から遠い車両βが逆方向路を走行していると判定される。尚、本実施の形態で説明する順方向と逆方向は、あくまでも命名の一例にすぎず、基準局4と移動局である自車両1との通信が確立した際の、基準局4と自車両1との距離が予め設定しておいた距離Lc(例えば10m)以下の場合に現在の走行路が逆方向路と判定するように定義しても良い。
【0024】
また、本実施の形態の図5に示すフローチャートの例においては、自車両1の現在位置に最も近い走行路のノードの番号が自車両1の進行方向に向かって昇順の場合に現在の走行路が順方向路と判定する。
【0025】
また、本実施の形態においては、今回の走行路に対する判定結果が逆方向路となった場合であっても、過去に学習し記憶しておいた順方向路に対する平均位置の誤差WLが予め設定しておいた閾値Wg(例えば1m)以内であれば、今回の走行路を順方向路として学習させるようになっている。すなわち、図8(b)に示すように、順方向路と逆方向路とが予め設定しておいた閾値Wg以下に設定されるのであれば、常に自車両1は走行路の中央等の同じ位置を走行するものとして判断できるため、順方向と逆方向とで区別して学習する必要がない。ここで、平均位置の誤差WLについて説明すると、これは、順方向路を形成するノード点列と、逆方向路を形成するノード点列において、両ノード点列のうち道路幅方向における位置のずれ量の平均値、詳細には、両ノード点列のうちノード点の総数の少ない方を基準として、基準とするノード点列の各ノード点に対して、これに隣接する他方のノード点列のノード点をそれぞれ選択し、これらノード点間における道路幅方向における距離(ズレ量)の平均を算出して、これを平均位置の誤差WLとする。
【0026】
このように、制御装置8は、車両位置演算手段、走行路記憶手段、走行路判定手段、及び、走行路学習手段の機能を有して構成されている。
【0027】
一方、制御装置8は、基準局4との通信が確立されていても、自車両1の現在位置が過去に作成された走行路と略一致していない場合には、自動操縦するのではなく、現在の自車位置から連続して形成する自車両の走行路を図示しないハードディスク、内蔵メモリ、或いは、CD、DVD等の読み込み書き込み自在な記憶メディアに新たに記憶させる。
【0028】
次に、図2のフローチャートにより、走行制御装置2における自動操縦制御のプログラムを説明する。この図2のフローチャートは、自動操縦制御のメインスイッチ11がONされ、目標速度が設定されると、所定時間毎に実行されるプログラムで、まず、ステップ(以下、「S」と略称)101で必要なパラメータの読み込みが行われる。
【0029】
次いで、S102に進み、自車両1が基準局4との通信可能領域に入り、移動局である自車両1と基準局4との間で通信が確立されているか否か判定し、通信が確立されていない場合には、そのままプログラムを抜ける。逆に、通信が確立されている場合には、S103に進み、GPS受信機5bで基準局4からの情報とGPS衛星3からの情報を基に自車位置を演算し、S104へと進む。
【0030】
S104では、自車両1の現在位置が、過去に作成した、図示しないハードディスク、内蔵メモリ、或いは、CD、DVD等の読み込み書き込み自在な記憶メディアの地図のノードと略一致するか(例えば、現在位置から±2m以内に過去のノードが存在するか)否か判定する。
【0031】
S104の判定の結果、自車両1の現在位置が過去に作成したノードに略一致しないと判定した場合には、S105に進み、以降の走行経路を設定間隔(例えば、3〜5m間隔)のノード列として、図示しないハードディスク、内蔵メモリ、或いは、CD、DVD等の読み込み書き込み自在な記憶メディアに記憶する。この際、この新たなノード列の記憶は、一定時間(例えば、15分)、一定距離(例えば、300m)で制限し、この制限を超えても目標に到達できない場合は、今回記憶してきたノード列を全て消去する。すなわち、この制限を超える場合は、自車両1が目標に向かうことなく停車した、或いは、目標に辿り着こうとしていないと判断できるからである。また、途中で基準局4との通信が途切れるような場合においても、正確な走行路の生成ができないので、今回記憶してきたノード列を全て消去する。尚、過去に記憶された走行路は、ドライバにより適宜消去できるようになっている。
【0032】
一方、S104の判定の結果、自車両1の現在位置が過去に作成したノードに略一致すると判定した場合には、S106に進み、自動操縦制御スイッチがONか否か判定し、自動操縦制御スイッチがONの場合には、S107に進んで、その一致した過去に記憶したノード列を目標進行路に設定し、上述の如く自動操縦制御して、プログラムを抜ける。尚、この自動操縦制御では、例えば障害物認識部7により前方10m以内に障害物が検出されたとき、ドライバが大きくステアリング操作した場合、ブレーキペダル、アクセルペダルを踏んだとき、或いは、自動操縦制御のメインスイッチ11をOFFにした場合にはキャンセルする。
【0033】
逆に、S106で自動操縦制御スイッチがOFFと判定した場合には、S108に進んで、記憶されている走行路の学習(ルート学習処理)を実行してプログラムを抜ける。
【0034】
次に、制御装置8における上述の自動操縦制御のS107で実行される、特に自動操舵について、図3のフローチャート及び図7の自動操舵の原理の説明図を用いて説明する。まず、S201で必要なパラメータの読み込みが行われる。
【0035】
次に、S202に進み、自車位置の過去の履歴の中から、例えば、現在位置より略車長長さ(例えば、5m)手前の自車測位点履歴を抽出し、この5m手前の自車測位点と現在の自車位置とを結んで得られる前方への直線方向を自車進行路として推定する。
【0036】
次いで、S203に進み、現在の自車位置から最も近い、目標進行路のノードを抽出する。
【0037】
その後、S204に進み、現在の自車速と、予め設定しておいた前方注視時間(例えば、1.5秒)より、前方注視距離を求める。例えば、現在の自車速が20km/hの場合は、前方注視距離は、5.56m・1.5秒=8.34m。
【0038】
次いで、S205に進み、S204で求めた前方注視距離近傍の目標進行路上のノードを誘導目標ノードとして設定する。
【0039】
次に、S206に進み、誘導目標ノードと自車進行路からの横方向のずれ量を目標ノード偏差ΔDとして演算する。
【0040】
次いで、S207に進み、目標ノード偏差ΔDをゼロにするように目標ハンドル角δhを以下の(1)式により算出する。
δh=Gp・ΔD+Gd・(d(ΔD)/dt) …(1)
ここで、Gpは比例項ゲインであり、Gdは微分項ゲインである。
【0041】
次に、S208に進み、目標ハンドル角δhとハンドル角センサ10で検出した実際のハンドル角θHとからハンドル角偏差Δδ(=δh−θH)を演算する。
【0042】
次いで、S209に進み、以下の(2)式によりハンドル角偏差Δδをゼロにするように、電動パワーステアリング制御装置17における電動パワーステアリングモータの指示電流Iδを演算し、S210で、この指示電流Iδを出力してプログラムを抜ける。
Iδ=Kp・Δδ+Kd・(d(Δδ)/dt)+Ki・∫Δδdt …(2)
ここで、Kpは比例項ゲイン、Kdは微分項ゲイン、Kiは積分項ゲインである。
【0043】
次に、制御装置8における上述の自動操縦制御のS108で実行される、ルート学習処理について、図4のフローチャートを用いて説明する。
まず、S301で基準局4と自車両1との距離が予め設定しておいた距離Lc(例えば10m)以下か否か判定される。
【0044】
このS301の判定の結果、基準局4と自車両1との距離がLc以下と判定された場合は、S302に進み、自車両1は順方向路を走行中と判定し、S303に進んで、今回得られた走行路を過去の順方向路に対する学習材料として学習し、ルーチンを抜ける。
【0045】
また、S301の判定の結果、基準局4と自車両1との距離がLcを超えていると判定した場合はS304に進み、自車両1は逆方向路を走行中と判定し、S305に進む。
【0046】
S305では、今回、S304で逆方向路と判定された走行路と過去に学習し記憶しておいた順方向路とを比較して両ルートの平均位置の誤差が予め設定しておいた閾値Wg(例えば1m)以内か否か判定される。
【0047】
このS305の判定の結果、両ルートの平均位置の誤差が予め設定しておいた閾値Wg以内であれば、前述したように順方向と逆方向とで区別して学習する必要がないと判断できるため、S303に進んで、今回得られた走行路を過去の順方向路に対する学習材料として学習し、ルーチンを抜ける。
【0048】
逆に、S305の判定の結果、両ルートの平均位置の誤差が予め設定しておいた閾値Wgを超えている場合は、順方向路と逆方向路とで分けて学習する必要があるため、S306に進んで、走行路を過去の逆方向路に対する学習材料として学習し、ルーチンを抜ける。尚、この場合、逆方向路として学習するのではなく、新たな走行路として認識して学習するようにしても良い。
【0049】
一方、制御装置8における上述の自動操縦制御のS108で実行される、ルート学習処理は、図5に示すフローチャートに示すような処理にて実行するようにしても良い。
【0050】
まず、S401では、現在位置に対して最も近い走行路のノード番号を検索する。
【0051】
その後、S402に進み、自車進行方向に対して走行路のノード番号の変化が昇順か否か判定する。そして、この判定の結果、昇順であればS302に進み、現在の走行路は順方向路と判定し、昇順でなければS304に進んで、現在の走行路は逆方向路と判定する。S302以降の処理は、図4の説明と同様であるので省略する。
【0052】
このように本実施の形態によれば、基準局4は自宅等、使用者が好みの場所に選択的に設定できるので、利便性が良い。
【0053】
また、基準局4の周りにおいてのみ自動操縦制御するようになっているので、長い距離で目標進行路を設定して、途中に交差点等が存在し、自動操縦制御が実際には困難になるという問題がなく利便性が高い。
【0054】
更に、基準局4の周りにおいて、ドライバが実際に走行した走行路を以後の目標進行路として設定するようになっているので、ドライバの意図する経路で自動操縦制御が行われ、使いやすい。
【0055】
また、基準局4の周辺領域でドライバが実際に走行した走行路が細かく設定されるので、基準局4の周辺領域内で道路工事等や交通法規の変更があっても、これを即座に反映した走行経路を目標進行路に設定して自動操縦制御を実行することが可能である。
【0056】
更に、自動操縦制御は、障害物が検出されるとキャンセルされるので、十分な安全性を有している。更に、ドライバのブレーキペダル操作、アクセルペダル操作、ステアリング操作により、自動操縦制御がキャンセルされるので、ドライバの運転意思を十分に反映して安全で使いやすい自動操縦制御となっている。
【0057】
また、本実施の形態によれば、同じ走行路においても、順方向路と逆方向路とを別ルートとして学習できるようになっているため、中央左寄りを走行する場合においても、自動操縦制御で正確にこれを再現でき、確実、且つ、安定した自動操縦制御が可能となる。
【0058】
尚、本発明の実施の形態では、障害物検出手段は、ステレオカメラ6にて撮影した画像を基に認識するようになっているが、他の装置、例えば、超音波センサ等で検出するようにしても良い。
【0059】
また、本発明の実施の形態では、目標進行路は過去に走行した走行経路の中から選択されるようになっているが、ドライバが自分でメモリ上に好みの走行経路を記憶できるようにしても良い。
【0060】
また、本発明の実施の形態では、基準局4からは、一般的な無線LANの規格により自車両1に各情報を送信するようになっているが、情報を無線送信できるものであれば、これに限ることなく、所謂、Bluetooth規格による無線で実現し、公知の携帯電話、携帯端末、PDA(Personal Digital Assistant)等の無線装置で情報伝達を行えるようにしても良い。
【0061】
更に、本発明の実施の形態においては、基準局4からは、自車両1の自車位置を求める為の補正情報のみを送信するようにしているが、この情報以外に他の情報を送信するようにしても良い。例えば、基準局4が自宅に設定されるものであれば、自宅のセキュリティ情報(侵入警報の状態、火災警報の状態)や、電灯やテレビ、パーソナルコンピュータの動作状態(ホームエレクトロニクス情報)、帰宅している人の信号(それぞれの帰宅した人が帰宅時にON、外出時にOFFする信号)等を送信するようにしても良い。
【0062】
また、基準局4を車両のサービス拠点等に設定する場合は、そのサービス拠点で行っているサービス情報や、宣伝情報を送信し、サービスの効率の向上を図ることが可能となる。また、サービス拠点近傍に車両が到達すれば、その車両は迷うことなく、サービス拠点に到着することができるので、サービス性の大きな向上につながる。そして、このようなサービス拠点では、サービス拠点までの走行経路を書き込ませた安価なCD、DVD等の記憶メディアを多くの利用者に配ることにより、サービス販売の一層の利益向上につなげることができる。
【0063】
また、本発明の実施の形態では、基準局4周辺の走行路情報を記憶する機能は、自車両1の制御装置8に設けるようにしているが、基準局4側に配設するようにしても良い。
【0064】
また、本発明の実施の形態では、基準局を自宅等に設定したがこれに限定されるものでなく、基準局を所定敷地内、例えば、工場又は駐車場内等に設置し、所定敷地内にて通信を確立させ、確立させた以降における所定敷地内での車両の走行制御に適用することも可能である。
【0065】
また、本実施形態では、制御装置8により測位される自車位置に基づいて走行ルートを取得する構成について説明したが、これに限定されず、移動局による衛星からの情報に基づく車両位置を基準局側に送信し、基準局4にて、基準局の情報と車両位置とに基づいて車両位置を演算する構成とすることができる。すなわち、基準局4側に車両位置演算手段を設けても良い。この場合には、走行ルート等の情報を基準局側にて蓄積することが可能となる。
【0066】
尚、基準局4ではなく、基準局とは別局にて基準局及び移動局からの情報を受信して車両位置及び走行ルート等の情報を蓄積することも可能である。
【図面の簡単な説明】
【0067】
【図1】車両の走行制御装置の全体を示す概略説明図
【図2】自動操縦制御のメインプログラムのフローチャート
【図3】自動操縦制御の自動操舵のフローチャート
【図4】ルート学習処理ルーチンのフローチャート
【図5】図4とは異なるルート学習処理ルーチンの例を示すフローチャート
【図6】基準局の周辺の通信可能領域及び移動局の順方向と逆方向の判定の説明図
【図7】自動操舵の原理の説明図
【図8】逆方向路と順方向路の説明図
【符号の説明】
【0068】
1 自車両(移動局)
2 走行制御装置
3 GPS衛星
4 基準局
4a GPSアンテナ
4b GPS受信機
4c 無線機
5a GPSアンテナ
5b GPS受信機
5c 無線機
8 制御装置(車両位置演算手段、走行路記憶手段、走行路判定手段、走行路学習手段)
【特許請求の範囲】
【請求項1】
予め位置が求められた位置に選択的に設定し、衛星からの情報を基に補正情報を算出する基準局と、
車両に搭載され、上記衛星からの情報に基づき車両位置を演算する移動局と、
上記基準局と上記移動局との通信が確立した際に、上記基準局の情報と上記車両位置とから該車両位置を補正演算する車両位置演算手段と、
上記自車両が走行する走行路を記憶する走行路記憶手段と、
現在の自車位置が上記走行路記憶手段で過去に記憶した走行路と略一致すると判定した場合に、現在の走行路が、過去に記憶した走行路に対する順方向路と逆方向路のどちらかであるかを判定する走行路判定手段と、
上記走行路判定手段による判定結果に基づいて、上記順方向路と上記逆方向路をそれぞれ区別して学習させる走行路学習手段と、
を備えたことを特徴とする車両の走行制御装置。
【請求項2】
上記走行路判定手段は、上記基準局と上記移動局との通信が確立した際の上記基準局と上記移動局との距離が予め設定しておいた距離以下の場合に現在の走行路が順方向路と判定することを特徴とする請求項1記載の車両の走行制御装置。
【請求項3】
上記走行路記憶手段で記憶する走行路は、上記自車両が進行していく方向に予め定める規則性で情報を持たせたノードの連続で記憶するものであって、
上記走行路判定手段は、現在位置に最も近い走行路のノードの規則性の情報と今回の走行路のノードの規則性とを比較して現在の走行路が順方向路か否か判定することを特徴とする請求項1記載の車両の走行制御装置。
【請求項4】
上記走行路学習手段は、上記走行路判定手段による今回の走行路に対する判定結果が逆方向路となった場合であっても、過去に学習し記憶しておいた順方向路に対する平均位置の誤差が予め設定しておいた閾値以内であれば、上記今回の走行路を順方向路として学習させることを特徴とする請求項1乃至請求項3の何れか一つに記載の車両の走行制御装置。
【請求項1】
予め位置が求められた位置に選択的に設定し、衛星からの情報を基に補正情報を算出する基準局と、
車両に搭載され、上記衛星からの情報に基づき車両位置を演算する移動局と、
上記基準局と上記移動局との通信が確立した際に、上記基準局の情報と上記車両位置とから該車両位置を補正演算する車両位置演算手段と、
上記自車両が走行する走行路を記憶する走行路記憶手段と、
現在の自車位置が上記走行路記憶手段で過去に記憶した走行路と略一致すると判定した場合に、現在の走行路が、過去に記憶した走行路に対する順方向路と逆方向路のどちらかであるかを判定する走行路判定手段と、
上記走行路判定手段による判定結果に基づいて、上記順方向路と上記逆方向路をそれぞれ区別して学習させる走行路学習手段と、
を備えたことを特徴とする車両の走行制御装置。
【請求項2】
上記走行路判定手段は、上記基準局と上記移動局との通信が確立した際の上記基準局と上記移動局との距離が予め設定しておいた距離以下の場合に現在の走行路が順方向路と判定することを特徴とする請求項1記載の車両の走行制御装置。
【請求項3】
上記走行路記憶手段で記憶する走行路は、上記自車両が進行していく方向に予め定める規則性で情報を持たせたノードの連続で記憶するものであって、
上記走行路判定手段は、現在位置に最も近い走行路のノードの規則性の情報と今回の走行路のノードの規則性とを比較して現在の走行路が順方向路か否か判定することを特徴とする請求項1記載の車両の走行制御装置。
【請求項4】
上記走行路学習手段は、上記走行路判定手段による今回の走行路に対する判定結果が逆方向路となった場合であっても、過去に学習し記憶しておいた順方向路に対する平均位置の誤差が予め設定しておいた閾値以内であれば、上記今回の走行路を順方向路として学習させることを特徴とする請求項1乃至請求項3の何れか一つに記載の車両の走行制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2006−322754(P2006−322754A)
【公開日】平成18年11月30日(2006.11.30)
【国際特許分類】
【出願番号】特願2005−144484(P2005−144484)
【出願日】平成17年5月17日(2005.5.17)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.Bluetooth
【出願人】(000005348)富士重工業株式会社 (3,010)
【Fターム(参考)】
【公開日】平成18年11月30日(2006.11.30)
【国際特許分類】
【出願日】平成17年5月17日(2005.5.17)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.Bluetooth
【出願人】(000005348)富士重工業株式会社 (3,010)
【Fターム(参考)】
[ Back to top ]