
車両の走行制御装置
【課題】 現在普及している車両にすぐにでも適用でき、緊急地震速報を受信したときに適切な車両走行制御を行い、緊急地震速報によって生じることが懸念されているパニックを抑制することができる、車両の走行制御装置を提供する。
【解決手段】 緊急地震速報を受信し、地震対応制御を行う場合において、アクセルペダル操作量APが増加するときは、その増加方向の変化量が減少する(増加速度が減少する)ようにアクセルペダル操作量APが補正され、補正アクセルペダル操作量APCが算出される。補正アクセルペダル操作量APCに応じてエンジンのスロットル弁開度を制御するスロットルアクチュエータ31の駆動制御が行われる。ブレーキペダル操作量BP及びステアリングホイールの操舵角STについても、ほぼ同様の処理により補正ブレーキペダル操作量BPC及び補正操舵角STCが算出される。
【解決手段】 緊急地震速報を受信し、地震対応制御を行う場合において、アクセルペダル操作量APが増加するときは、その増加方向の変化量が減少する(増加速度が減少する)ようにアクセルペダル操作量APが補正され、補正アクセルペダル操作量APCが算出される。補正アクセルペダル操作量APCに応じてエンジンのスロットル弁開度を制御するスロットルアクチュエータ31の駆動制御が行われる。ブレーキペダル操作量BP及びステアリングホイールの操舵角STについても、ほぼ同様の処理により補正ブレーキペダル操作量BPC及び補正操舵角STCが算出される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の走行制御装置に関し、特に地震発生時に送信される緊急地震速報を受信する機能を有する走行制御装置に関する。
【背景技術】
【0002】
揺れの強い地震が到達すると予想される地域に対して、緊急地震速報を発するサービスが、2007年10月1日から気象庁によって行われている。このサービスは、地震の発生直後に、震源に近い観測点の地震計で測定した地震波データから震源や地震の規模を推定し、できる限り速やかに当該地域で予想される震度等を報知するものである。
【0003】
現在、日本においては、報知される内容が詳細な「高度利用者向け緊急地震速報」と、無用な混乱を避けるために精度を向上させかつ内容を限定した「一般向け緊急地震速報」の2種類の緊急地震速報が提供されている。
【0004】
一般に、車両運転中に地震が起きた場合、車両の走行速度を落とし、左側の路肩に停めることが求められている。同様に、緊急地震速報を受信した場合も、急ブレーキ・急ハンドルを避け、ハザードランプを点滅させ、ゆっくり速度を落とし、左側の路肩に停めることが推奨されている。特に、緊急地震速報を受信していない車両が周辺を走行している可能性があるため、急激な運転操作を行わないように強く注意が促されている。
【0005】
特許文献1には、地震発生時に車両を適切に走行させるための走行制御装置が示されている。この装置によれば、緊急地震速報受信後に、予想震度、倒壊が予測される地域、周辺の障害物の状況、周囲の車両の走行状況に応じて、車両の減速やレーンチェンジ、停止を考慮した走行計画を策定し、その走行計画に基づいて走行制御が行われる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2008−146168号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
2004年及び2005年の試験運用段階の精度評価報告によれば、誤った緊急地震速報が比較的多い(320件中20件が誤報)、あるいは地震(主要動)の到達時刻に間に合わないことが多い(震度5弱以上の16件中、11件で間に合わなかった)といった問題点が指摘されている。
【0008】
また、当該車両の前後を走行する車両や走行レーンの状況、到達予想時刻を組み合わせて走行計画を策定しても、絶えず周囲の環境は変化しており、策定した走行計画が必ずしも妥当なものであるとは限らない。
【0009】
本発明はこの点に着目してなされたものであり、現在普及している車両にすぐにでも適用でき、緊急地震速報を受信したときに適切な車両走行制御を行い、緊急地震速報によって生じることが懸念されているパニックを抑制することができる、車両の走行制御装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
上記目的を達成するため請求項1に記載の発明は、緊急地震速報を受信する緊急地震速報受信手段を備える、車両の走行制御装置において、前記車両の運転者が車両走行制御のために操作する操作手段と、前記運転者が前記操作手段を介して入力した操作入力量(AP,BP,ST)を検出する操作入力量検出手段と、前記操作手段の操作に対応して前記車両の走行状態を制御する制御アクチュエータ(31,32,33)と、前記操作入力量(AP,BP,ST)に応じて前記制御アクチュエータを駆動する駆動手段と、前記緊急地震速報受信手段が前記緊急地震速報を受信した場合において、前記操作入力量(AP,BP,ST)が増加するときは、その増加速度が減少するように前記操作入力量(AP,BP,ST)を補正することにより、補正操作入力量(APC,BPC,STC)を算出する地震対応制御手段とを備え、前記駆動手段は、前記地震対応制御手段が作動しているときは、前記補正操作入力量(APC,BPC,STC)に応じて前記制御アクチュエータを駆動することを特徴とする。
【0011】
請求項2に記載の発明は、請求項1に記載の車両の走行制御装置において、前記運転者が前記地震対応制御手段の作動を停止させるための地震対応制御停止スイッチ(16)をさらに備えることを特徴とする。
【0012】
請求項3に記載の発明は、請求項1または2に記載の車両の走行制御装置において、前記地震対応制御手段は、前記操作入力量(AP,BP,ST)のローパスフィルタ処理を行い、フィルタ処理後操作入力量(APF,BPF,STF)を算出するフィルタ手段と、前記操作入力量(AP,BP,ST)及びフィルタ処理後操作入力量(APF,BPF,STF)の小さい方を選択し、前記補正操作入力量(APC,BPC,STC)として出力する選択手段とを有することを特徴とする
【0013】
請求項4に記載の発明は、請求項1から3のいずれか1項に記載の車両の走行制御装置において、前記緊急地震速報が当該地震の主要動の到達予想時刻(tPRD)を含む場合において、前記緊急地震速報を受信した受信時刻(tRCV)が、前記到達予想時刻(tPRD)を過ぎているとき、または前記受信時刻(tRCV)から前記到達予想時刻(tPRD)までの時間が安全停止時間(TSAFE)より短いときに、前記地震対応制御手段の作動を禁止する地震対応制御禁止手段をさらに備えることを特徴とする。
【0014】
請求項5に記載の発明は、請求項1から4のいずれか1項に記載の車両の走行制御装置において、前記車両の停止中に前記緊急地震速報を受信したときに、前記車両の発進を禁止する発進禁止手段をさらに備えることを特徴とする。
【0015】
請求項6に記載の発明は、請求項1から5のいずれか1項に記載の車両の走行制御装置において、前記操作手段は、前記車両のアクセルペダル、ブレーキペダル、及びステアリングホイールの少なくとも1つであることを特徴とする。
【発明の効果】
【0016】
請求項1に記載の発明によれば、緊急地震速報を受信した場合において、運転者が操作手段を介して入力した操作入力量が増加するときは、その増加速度が減少するように操作入力量を補正することにより、補正操作入力量が算出され、補正操作入力量に応じて車両の走行状態を制御する制御アクチュエータが駆動される。したがって、操作入力量の増加速度が大きいときに、制御アクチュエータの駆動量の変化が抑制される。その結果、緊急地震速報の受信時に適切な車両走行制御を行い、緊急地震速報によって生じることが懸念されているパニックを抑制する効果が得られる。
【0017】
請求項2に記載の発明によれば、地震対応制御停止スイッチを操作することにより、地震対応制御を行わないようにすることができるので、例えば誤報であることが判明したときに、運転者のスイッチ操作によって直ちに通常の走行制御に戻ることができる。
【0018】
請求項3に記載の発明によれば、操作入力量のローパスフィル処理を行うことにより、フィルタ処理後操作入力量が算出され、操作入力量及びフィルタ処理後操作入力量の小さい方が選択され、補正操作入力量として出力される。したがって、操作入力量が増加するときは、おおむね(操作入力量がフィルタ処理後操作入力量より小さいときを除き)フィルタ処理後操作入力量が選択される一方、操作入力量が減少するときは、おおむね(操作入力量がフィルタ処理後操作入力量より大きいときを除き)操作入力量が選択される。その結果、操作入力量の増加速度が大きいときに、制御アクチュエータの駆動量の変化を抑制することができる。
【0019】
請求項4に記載の発明によれば、緊急地震速報が当該地震の主要動の到達予想時刻を含む場合において、緊急地震速報を受信した受信時刻が、到達予想時刻を過ぎているとき、または受信時刻から到達予想時刻までの時間が安全停止時間より短いときに、地震対応制御手段の作動が禁止されるので、地震対応制御を開始しても意味がない場合あるいは安全に停止できないときは、通常の走行制御が継続される。したがって、例えば当該車両が震源地に近い場合などにおいて、地震対応制御が禁止され、迅速な操作を行うことができる。
【0020】
請求項5に記載の発明によれば、車両の停止中に緊急地震速報を受信したときに、車両の発進が禁止されるので、地震が到達する直前に車両を発進させることを回避し、安全を確保できる。
【0021】
請求項6に記載の発明によれば、操作手段は、車両のアクセルペダル、ブレーキペダル、及びステアリングホイールの少なくとも1つであるので、緊急地震速報受信時において、アクセルペダル操作、ブレーキ操作、及び/またはステアリングホイール操作による走行制御を、適切に行うことができる。
【図面の簡単な説明】
【0022】
【図1】本発明の一実施形態にかかる車両の走行制御装置の構成を示すブロック図である。
【図2】緊急地震速報を受信したときに実行され、地震対応制御の禁止判定を行う処理のフローチャートである。
【図3】地震対応制御の実行条件を判定する処理のフローチャートである。
【図4】アクセルペダル操作量(AP)の補正(地震対応制御)を行う処理のフローチャートである。
【図5】図4の処理を説明するためのタイムチャートである。
【図6】ブレーキペダル操作量(BP)の補正(地震対応制御)を行う処理のフローチャートである。
【図7】ステアリングホイールの操舵角(ST)の補正(地震対応制御)を行う処理のフローチャートである。
【図8】車両の発進禁止判定を行う処理のフローチャートである。
【発明を実施するための形態】
【0023】
以下本発明の実施の形態を図面を参照して説明する。
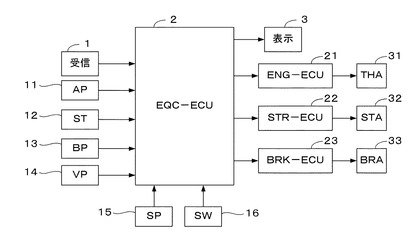
図1は本発明の一実施形態にかかる車両の走行制御装置の構成を示す図である。当該車両は、内燃機関(以下「エンジン」という)により駆動される自動車であり、ステアリングホイール、アクセルペダル、ブレーキペダル、自動変速機、自動変速機のレンジ選択レバーなどを備えており、さらに緊急地震速報を受信する受信装置1と、受信装置1が緊急地震速報を受信したときに、地震対応制御を行うための地震対応制御用電子制御ユニット(以下「EQC−ECU」という)2と、緊急地震速報に関連する情報を表示する表示部3とを備えている。受信装置1は、高度利用者向け緊急地震速報を受信できるものである。
【0024】
EQC−ECU2には、アクセルペダルの踏み込み量(以下「アクセルペダル操作量」という)APを検出するアクセルセンサ11、ステアリングホイールの操舵角STを検出する操舵角センサ12、ブレーキペダルの踏み込み量(以下「ブレーキペダル操作量」という)BPを検出するブレーキセンサ13、車速VPを検出する車速センサ14、及び自動変速機のレンジ選択レバーの位置(以下「シフト位置」という)SPを検出するシフト位置センサ15が接続されており、これらのセンサの検出信号が、EQC−ECU2に供給される。なお、本実施形態では、操舵角STはステアリングホイールを右方向に操作したとき正の値をとり、左方向に操作したとき負の値をとる。
【0025】
またEQC−ECU2には、当該車両の運転者が、緊急地震速報に対応する地震対応制御を停止させるための制御停止スイッチ16が接続されており、制御停止スイッチ16のオンオフ信号が、EQC−ECU2に供給される。
【0026】
EQC−ECU2の出力側には、エンジン制御用電子制御ユニット(以下「ENG−ECU」という)21と、転舵制御用電子制御ユニット22と、ブレーキ制御用電子制御ユニット23とが接続されている。
【0027】
EQC−ECU2は、各種センサからの入力信号波形を整形し、電圧レベルを所定レベルに修正し、アナログ信号値をデジタル信号値に変換する等の機能を有する入力回路、中央演算処理回路(以下「CPU」という)、CPUで実行される各種演算プログラム及び演算結果等を記憶する記憶回路、及び表示部3、ENG−ECU21などに制御信号を供給する出力回路を備えている。
【0028】
EQC−ECU2は、緊急地震速報の受信直後以外は、検出されるアクセルペダル操作量AP、操舵角ST、及びブレーキペダル操作量BPを、補正することなく、それぞれENG−ECU21、STR−ECU22、及びBRK−ECU23に出力する。緊急地震速報を受信したときは、後述する地震対応制御を実行し、アクセルペダル操作量AP、操舵角ST、及びブレーキペダル操作量BPの補正を行い、補正アクセルペダル操作量APC、補正操舵角STC、及び補正ブレーキペダル操作量BPCを出力する。
【0029】
ENG−ECU21は、EQC−ECU2から供給される補正アクセルペダル操作量APC(無補正時はアクセルペダル操作量APと等しい)に応じたスロットル弁の駆動制御信号を、エンジンのスロットル弁を駆動するスロットル制御アクチュエータ31に供給する。これにより、エンジン1の出力トルクが、補正アクセルペダル操作量APCに応じて制御される。
【0030】
STR−ECU22は、EQC−ECU2から供給される補正操舵角STC(無補正時は操舵角STと等しい)に応じた転舵機構の駆動制御信号を、転舵機構を駆動する転舵制御アクチュエータ32に供給する。これにより、車両の転舵輪の転舵角が、補正操舵角STCに応じて制御される。
【0031】
BRK−ECU23は、EQC−ECU2から供給される補正ブレーキペダル操作量BPC(無補正時はブレーキペダル操作量BPと等しい)に応じたブレーキ機構の駆動制御信号を、ブレーキ機構を駆動するブレーキ制御アクチュエータ33に供給する。これにより、車両のブレーキが、補正ブレーキペダル操作量BPCに応じて制御される。
【0032】
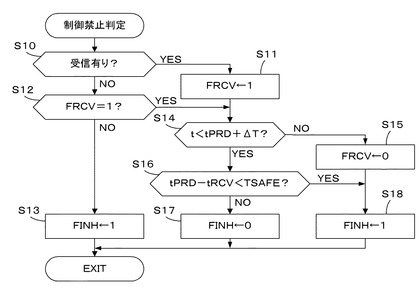
図2は、制御禁止判定処理のフローチャートである。この処理は、EQC−ECU2のCPUで、所定時間TCAL(例えば100msec)毎に実行される。
ステップS10では、緊急地震速報受信を受信したか否かを判別し、受信したときは受信フラグFRCVを「1」に設定する(ステップS11)。受信していないときは直ちにステップS12に進む。
【0033】
ステップS12では、受信フラグFRCVが「1」であるか否かを判別し、その答が否定(NO)であるときは、地震対応制御禁止フラグFINHを「1」に設定する(ステップS13)。地震対応制御禁止フラグFINHが「1」に設定されると、地震対応制御の実行が禁止される。
【0034】
ステップS12でFRCV=1であるときは、ステップS14に進み、現在時刻tが、緊急地震速報に含まれる主要動の到達予想時刻tPRDに余裕時間ΔT(例えば10秒)を加算した時刻より前であるか否かを判別する。その答が否定(NO)であるときは、受信フラグFRCVを「0」に戻し(ステップS15)、地震対応制御禁止フラグFINHを「1」に設定する(ステップS18)。
【0035】
ステップS14で現在時刻tが到達予想時刻tPRDに余裕時間ΔTを加算した時刻より前であるときは、受信時刻tRCVから到達予想時刻tPRDまでの時間が、車両の安全停止時間TSAFEより短いか否かを判別する(ステップS16)。安全停止時間TSAFEは、例えば下記式(1)により算出される。式(1)のkSTPは、予め実験的に決定される換算係数である。すなわち、安全停止時間TSAFEは車速VPに比例するように設定される。
TSAFE=kSTP×VP (1)
【0036】
なお、式(1)を用いることに代えて、車速VPに応じたTSAFEテーブルを予め設定しておき、テーブル検索により、安全停止時間TSAFEを算出するようにしてもよい。
【0037】
ステップS16の答が否定(NO)であるときは、地震対応制御禁止フラグFINHを「0」に設定する(ステップS17)。一方、ステップS16の答が肯定(YES)であって、主要動が到達するまでの時間が安全停止時間TSAFEより短いときは、ステップS18に進み、地震対応制御禁止フラグFINHを「1」に設定する。
【0038】
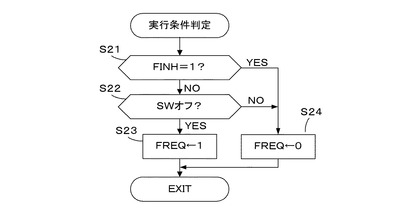
図3は、地震対応制御の実行条件を判定する処理のフローチャートである。この処理は、EQC−ECU2のCPUで所定時間TCAL毎に実行される。
ステップS21では、地震対応制御禁止フラグFINHが「1」であるか否かを判別し、その答が否定(NO)であるときは、制御停止スイッチ16がオフ状態であるか否かを判別する(ステップS22)。
【0039】
ステップS21の答が肯定(YES)またはステップS22の答が否定(NO)であるとき、すなわち地震対応制御禁止フラグFINHが「1」であるとき、または制御停止スイッチ16がオン状態であるときは、制御実行フラグFREQを「0」に設定する(ステップS24)。
【0040】
一方、ステップS22の答が肯定(YES)であるときは、制御実行フラグFREQを「1」に設定する。制御実行フラグFREQが「1」に設定されると、地震対応制御が実行される。
【0041】
図3の処理により、地震対応制御禁止フラグFINHが「0」でかつ制御停止スイッチ16がオフ状態であれば、地震対応制御が実行される。また制御停止スイッチ16がオンされると直ちに地震対応制御が中止される。
【0042】
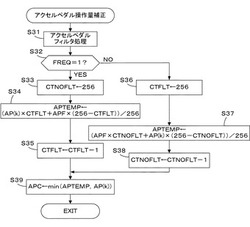
図4は、アクセルペダル操作量APを補正し、補正アクセルペダル操作量APCを算出する処理のフローチャートである。この処理は、EQC−ECU2のCPUで所定時間TCAL毎に実行される。
【0043】
ステップS31では、アクセルペダル操作量APのローパスフィルタ処理を行い、フィルタ処理後アクセルペダル操作量APFを算出する。具体的には、下記式(2)にアクセルペダル操作量AP(k)を適用して、フィルタ処理後アクセルペダル操作量APFを算出する。
APF=CFAP×AP(k)+(1−CFAP)×APF(k-1) (2)
ここでCFAPは、フィルタ係数であり、例えば0.01に設定される。「k」は、この処理の実行周期である所定時間TCALで離散化した離散化時刻であり、(k)は今回値であることを示すが、通常は省略されている。
【0044】
ステップS32では、制御実行フラグFREQが「1」であるか否かを判別し、その答が否定(NO)であるときは、第1過渡制御カウンタCTFLTの値を「256」に設定する(ステップS36)。第1過渡制御カウンタCTFLTは、後述するステップS34及びS35の処理で使用される。
【0045】
ステップS37では、下記式(3)により過渡制御値APTEMPを算出する。式(3)のCTNOFLTは、ステップS33で「256」に設定される第2過渡制御カウンタであり、地震対応制御を終了した直後は「256」に設定されている。
APTEMP={APF×CTNOFLT
+AP(k)×(256−CTNOFLT)}/256 (3)
【0046】
ステップS38では、第2過渡制御カウンタCTNOFLTの値を「1」だけデクリメントする。このとき、第2過渡制御カウンタCTNOFLTの値が負の値とならないようにリミット処理が行われる。
【0047】
したがって、ステップS37及びS38を繰り返し実行することにより、過渡制御値APTEMPは、地震対応制御終了直後は、フィルタ処理後アクセルペダル操作量APFに等しく、その後徐々にアクセルペダル操作量AP(k)に近づいていき、第2過渡制御カウンタCTNOFLTの値が「0」となったとき、アクセルペダル操作量AP(k)と一致する。
【0048】
ステップS39では、下記式(4)により、過渡制御値APTEMPと、アクセルペダル操作量AP(k)の小さい方を選択することにより、補正アクセルペダル操作量APCを算出する。
APC=min(APTEMP,AP(k)) (4)
【0049】
ステップS32でFREQ=1であって、地震対応制御を実行するときは、第2過渡制御カウンタCTNOFLTの値を「256」に設定する(ステップS33)。ステップS34では、下記式(5)により過渡制御値APTEMPを算出する。式(5)のCTFLTは、ステップS36で「256」に設定される第1過渡制御カウンタであり、地震対応制御を開始した直後は「256」に設定されている。
APTEMP={AP(k)×CTFLT
+APF×(256−CTFLT)}/256 (5)
【0050】
ステップS35では、第1過渡制御カウンタCTFLTの値を「1」だけデクリメントする。このとき、第1過渡制御カウンタCTFLTの値が負の値とならないようにリミット処理が行われる。ステップS35を実行した後は、ステップS39に進む。
【0051】
したがって、ステップS34及びS35を繰り返し実行することにより、過渡制御値APTEMPは、地震対応制御開始直後は、アクセルペダル操作量AP(k)に等しく、その後徐々にフィルタ処理後アクセルペダル操作量APFに近づいていき、第1過渡制御カウンタCTFLTの値が「0」となったとき、フィルタ処理後アクセルペダル操作量APFと一致する。
【0052】
図4の処理により算出された補正アクセルペダル操作量APCは、ENG−ECU21に供給され、補正アクセルペダル操作量APCに応じたスロットル制御アクチュエータの駆動制御が行われる。
【0053】
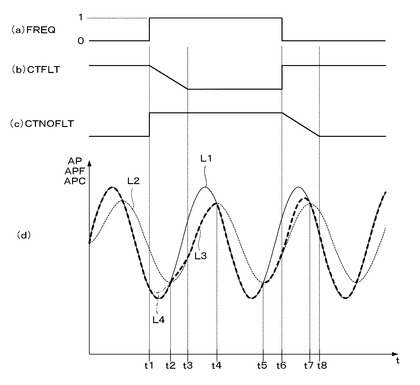
図5は、図4の処理を説明するためのタイムチャートであり、時刻t1に地震対応制御が開始され、時刻t6に終了した例が示されている。図5(a)〜図5(c)は、それぞれ制御実行フラグFREQ、第1過渡制御カウンタCTFLTの値、及び第2過渡制御カウンタCTNOFLTの値の推移を示し、図5(d)は、アクセルペダル操作量AP(実線L1)、フィルタ処理後アクセルペダル操作量APF(破線L2)、及び補正アクセルペダル操作量APC(太い破線
L3)の推移を示す。また時刻t1〜t2の間のみ、過渡制御値APTEMP(一点鎖線L4)が示されている。
【0054】
時刻t1からt3までの間では、過渡制御値APTEMPがアクセルペダル操作量APと、フィルタ処理後アクセルペダル操作量APFとの間の値をとるが、時刻t1からt2の間では、アクセルペダル操作量APが過渡制御値APTEMPより小さいため、補正アクセルペダル操作量APCは、アクセルペダル操作量APと等しい。
【0055】
時刻t2からt3の間では、補正アクセルペダル操作量APCは過渡制御値APTEMPに設定される。時刻t3からt6までは、過渡制御値APTEMPはフィルタ処理後アクセルペダル操作量APFと等しくなる。
【0056】
補正アクセルペダル操作量APCは、時刻t3からt4までは、フィルタ処理後アクセルペダル操作量APFと等しくなり、時刻t4からt5まではアクセルペダル操作量APと等しくなり、時刻t5からt6まではフィルタ処理後アクセルペダル操作量APFと等しくなる。
【0057】
時刻t6に地震対応制御が終了すると、時刻t8までは過渡制御値APTEMPは、アクセルペダル操作量APとフィルタ処理後アクセルペダル操作量APFの間の値をとるが、時刻t7からt8の間ではほぼアクセルペダル操作量APと一致しているため、図示が省略されている。補正アクセルペダル操作量APCは、時刻t6からt7までは過渡制御値APTEMPに設定され、時刻t7以後はアクセルペダル操作量APと等しくなる。
【0058】
以上のように図4の処理によれば、地震対応制御中は、アクセルペダル操作量APが増加するときは、アクセルペダル操作量APがフィルタ処理後アクセルペダル操作量APFより小さいときを除き、その増加方向の変化量が減少する(増加速度が減少する)ようにアクセルペダル操作量APを補正する一方、アクセルペダル操作量APが減少するときは、アクセルペダル操作量APがフィルタ処理後アクセルペダル操作量APFより大きいときを除き、アクセルペダル操作量APをそのまま採用することにより、補正アクセルペダル操作量APCが算出される。したがって、急激なアクセルペダル操作量APの増加が抑制され、スロットル制御アクチュエータの駆動量の変化が抑制される。その結果、緊急地震速報の受信時に適切なエンジン出力制御を行い、緊急地震速報によって生じることが懸念されているパニックを抑制する効果が得られる。
【0059】
図6は、検出されるブレーキペダル操作量BPに応じて補正ブレーキペダル操作量BPCを算出する処理のフローチャートである。この処理は、EQC−ECU2のCPUで所定時間TCAL毎に実行される。図6に示す処理は、基本的に図4の処理と同様の処理であり、図4の処理の終了後、続けて実行される。
【0060】
図6のステップS41では、ブレーキペダル操作量BPのローパスフィルタ処理を行い、フィルタ処理後ブレーキペダル操作量BPFを算出する。具体的には、下記式(6)にブレーキペダル操作量BP(k)を適用して、フィルタ処理後ブレーキペダル操作量BPFを算出する。
BPF=CFBP×BP(k)+(1−CFBP)×BPF(k-1) (6)
ここでCFBPは、フィルタ係数であり、例えば式(2)のフィルタ係数CFAPと同一の値に設定される。なお、フィルタ係数CFBPをフィルタ係数CFAPと異なる値に設定するようにしてもよい。
【0061】
ステップS42で制御実行フラグFREQが「1」であるか否かを判別し、その答が否定(NO)であるときは、下記式(7)により過渡制御値BPTEMPを算出する(ステップS47)。式(7)のCTNOFLTは、図4の処理で更新される第2過渡制御カウンタCTNOFLTの値がそのまま適用される。
BPTEMP={BPF×CTNOFLT
+BP(k)×(256−CTNOFLT)}/256 (7)
【0062】
ステップS42でFREQ=1であるときは、下記式(8)により過渡制御値BPTEMPを算出する(ステップS44)。式(8)のCTFLTは、図4の処理で更新される第1過渡制御カウンタCTFLTの値がそのまま適用される。
BPTEMP={BP(k)×CTFLT
+BPF×(256−CTFLT)}/256 (8)
【0063】
ステップS49では、下記式(9)により、過渡制御値BPTEMPと、ブレーキペダル操作量BP(k)の小さい方を選択することにより、補正ブレーキペダル操作量BPCを算出する。
BPC=min(BPTEMP,BP(k)) (9)
【0064】
図6の処理により、地震対応制御中は、ブレーキペダル操作量BPが増加するときは、ブレーキペダル操作量BPがフィルタ処理後ブレーキペダル操作量BPFより小さいときを除き、その増加方向の変化量が減少する(増加速度が減少する)ように補正する一方、ブレーキペダル操作量BPが減少するときは、ブレーキペダル操作量BPがフィルタ処理後ブレーキペダル操作量BPFより大きいときを除き、ブレーキペダル操作量BPをそのまま採用することにより、補正ブレーキペダル操作量BPCが算出される。したがって、急激なブレーキペダル操作量BPの増加が抑制され、ブレーキ制御アクチュエータ33の駆動量の変化が抑制される。その結果、緊急地震速報の受信時に適切なブレーキ制御を行い、緊急地震速報によって生じることが懸念されているパニックを抑制する効果が得られる。
【0065】
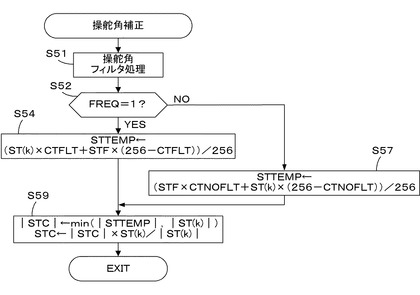
図7は、検出される操舵角STに応じて補正操舵角STCを算出する処理のフローチャートである。この処理は、EQC−ECU2のCPUで所定時間TCAL毎に実行される。図7に示す処理は、基本的に図4の処理と同様の処理であり、図4の処理の終了後、続けて実行される。
【0066】
図7のステップS51では、操舵角STのローパスフィルタ処理を行い、フィルタ処理後操舵角STFを算出する。具体的には、下記式(10)に操舵角ST(k)を適用して、フィルタ処理後操舵角STFを算出する。
STF=CFST×ST(k)+(1−CFST)×STF(k-1) (10)
ここでCFSTは、フィルタ係数であり、例えば式(2)のフィルタ係数CFAPと同一の値に設定される。なお、フィルタ係数CFSTをフィルタ係数CFAPと異なる値に設定するようにしてもよい。
【0067】
ステップS52で制御実行フラグFREQが「1」であるか否かを判別し、その答が否定(NO)であるときは、下記式(11)により過渡制御値STTEMPを算出する(ステップS57)。式(11)のCTNOFLTは、図4の処理で更新される第2過渡制御カウンタCTNOFLTの値がそのまま適用される。
STTEMP={STF×CTNOFLT
+ST(k)×(256−CTNOFLT)}/256 (11)
【0068】
ステップS52でFREQ=1であるときは、下記式(12)により過渡制御値STTEMPを算出する(ステップS54)。式(12)のCTFLTは、図4の処理で更新される第1過渡制御カウンタCTFLTの値がそのまま適用される。
STTEMP={ST(k)×CTFLT
+STF×(256−CTFLT)}/256 (12)
【0069】
ステップS59では、下記式(13)により、過渡制御値STTEMPの絶対値と、操舵角ST(k)の絶対値の小さい方を選択することにより、補正操舵角STCの絶対値を算出し、式(14)によって補正操舵角STCを算出する。
|STC|=min(|STTEMP|,|ST(k)|) (13)
STC=|STC|×ST(k)/|ST(k)| (14)
【0070】
図7の処理により、地震対応制御中は、操舵角STの絶対値が増加するときは、絶対値|ST|がフィルタ処理後操舵角STFの絶対値より小さいときを除き、絶対値|ST|の増加方向の変化量が減少する(増加速度が減少する)ように操舵角STを補正する一方、操舵角STの絶対値が減少するときは、絶対値|ST|がフィルタ処理後操舵角STFの絶対値より大きいときを除き、操舵角STをそのまま採用することにより、補正操舵角STCが算出される。したがって、操舵角STの絶対値の急激な増加が抑制され、転舵制御アクチュエータ32の駆動量の変化が抑制される。その結果、緊急地震速報の受信時に適切な転舵制御を行い、緊急地震速報によって生じることが懸念されているパニックを抑制する効果が得られる。
【0071】
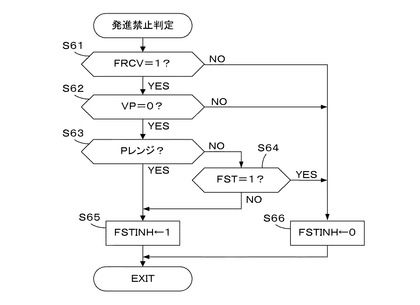
図8は、車両の発進禁止判定を行う処理のフローチャートある。この処理は、EQC−ECU2のCPUで所定時間TCAL毎に実行される。
ステップS61では、受信フラグFRCVが「1」であるか否かを判別し、その答が肯定(YES)であるときは、車速VPが「0」であるか否かを判別する(ステップS62)。ステップS61またはS62の答が否定(NO)であるときは、発進禁止フラグFSTINHを「0」に設定する(ステップS66)。
【0072】
ステップS62の答が肯定(YES)、すなわち当該車両が停止しているときは、シフト位置SPがPレンジであるか否かを判別する(ステップS63)。この答が肯定(YES)であるときは、発進禁止フラグFSTINHを「1」に設定する。ステップS63の答が否定(NO)、すなわちシフト位置SPがPレンジ以外のレンジであるときは、発進許可フラグFSTが「1」であるか否かを判別する。
【0073】
発進許可フラグFSTは、例えばシフト位置SPがDレンジとNレンジとの間の切換が2回連続して行われたときに「1」に設定される。そのような場合には、運転者が明確な発進意思表示をしたものと認識して、ステップS66に進み、発進禁止フラグFSTINHを「0」に設定する。
【0074】
ステップS64の答が否定(NO)であるときは、発進禁止フラグFSTINHを「1」に設定する(ステップS65)。
【0075】
発進禁止フラグFSTINHに関する情報は、ENG−ECU21に供給され、ENG−ECU21は、発進禁止フラグFSTINHが「1」に設定されたときは、例えばエンジンへの点火信号を供給しないことにより、強制的にエンジンの始動を禁止し、あるいは作動を停止させる。
【0076】
以上のように本実施形態では、緊急地震速報を受信した場合において、運転者がアクセルペダルなどを介して入力したアクセルペダル操作量APが増加するときは、その増加速度が減少するようにアクセルペダル操作量APを補正することにより、補正アクセルペダル操作量APCが算出され、補正アクセルペダル操作量APCに応じて車両の走行状態を制御する制御アクチュエータ31が駆動される。また、ブレーキペダル操作量BP及び操舵角STについても同様にして補正ブレーキペダル操作量BPC及び補正操舵角STCが算出され、補正ブレーキペダル操作量BPC及び補正操舵角STCに応じて対応する制御アクチュエータ32,33が駆動される。したがって、アクセルペダル操作量AP、ブレーキペダル操作量BP、及び操舵角STの絶対値の増加速度が大きいときに、制御アクチュエータ31〜33の駆動量の変化が抑制される。その結果、緊急地震速報の受信時に適切な車両走行制御を行い、緊急地震速報によって生じることが懸念されているパニックを抑制する効果が得られる。
【0077】
また運転者が制御停止スイッチ16をオン操作することにより、地震対応制御を行わないようにすることができるので、例えば誤報であることが判明したときに、運転者のスイッチ操作によって直ちに通常の走行制御に戻ることができる。
【0078】
またアクセルペダル操作量APのローパスフィル処理を行うことにより、フィルタ処理後アクセルペダル操作量APFが算出され、アクセルペダル操作量AP及びフィルタ処理後アクセルペダル操作量APFの小さい方が選択され、補正アクセルペダル操作量APCとして出力される。ブレーキペダル操作量BPについても同様に選択が行われ、操舵角STについては操舵角ST及びフィルタ処理後操舵角STFのうち絶対値の小さい方が選択され、補正操舵角STCとして出力される。したがって、アクセルペダル操作量AP若しくはブレーキペダル操作量BPが増加するときは、または操舵角STの絶対値が増加するときは、おおむねフィルタ処理後アクセルペダル操作量APF、フィルタ処理後ブレーキペダル操作量BPF、またはフィルタ処理後操舵角STFが選択され、操作入力量AP,BP,または|ST|の増加速度が大きいときに、制御アクチュエータの駆動量の変化を抑制することができる。
【0079】
また緊急地震速報の受信時刻tRCVが、到達予想時刻tPRDを過ぎているとき、または受信時刻tRCVから到達予想時刻tPRDまでの時間が安全停止時間TSAFEより短いときに、地震対応制御が禁止されるので、地震対応制御を開始しても意味がない場合あるいは安全に停止できないときは、通常の走行制御が継続される。したがって、例えば当該車両が震源地に近い場合などにおいて、地震対応制御が禁止され、迅速な操作を行うことができる。
【0080】
また車両の停止中に緊急地震速報を受信したときに、原則として車両の発進が禁止されるので、地震が到達する直前に車両を発進させることを回避し、安全を確保できる。
【0081】
本実施形態では、受信装置1が緊急地震速報受信手段に相当し、アクセルペダル、ブレーキペダル、及びステアリングホイールが操作手段に相当し、アクセルセンサ11、操舵角センサ12、及びブレーキセンサ13が操作入力量検出手段に相当し、EQC−ECU2,ENG−ECU21,STR−ECU22,及びBRK−ECU23が駆動手段に相当する。また、EQC−ECU2が、地震対応制御手段、フィルタ手段、選択手段、地震対応制御禁止手段、及び発進禁止手段を構成する。
【0082】
なお本発明は上述した実施形態に限るものではなく、種々の変形が可能である。例えば、上述した実施形態では、アクセルペダル操作量AP、ブレーキペダル操作量BP、及び操舵角STのすべてについて地震対応制御を行うようにしたが、これらの操作量のうちいずれか1つまたは2つについて、地震対応制御を行うようにしてもよい。
【0083】
また緊急地震速報を携帯電話で受信し、受信した緊急地震速報をEQC−ECU2に入力できる構成を採用してもよい。
また上述した実施形態では、緊急地震速報及び関連情報を表示装置により運転者に提供するようにしたが、音声出力装置によって提供するようにしてもよい。
【0084】
また上述した実施形態では、図2のステップS14の判別に適用する余裕時間ΔTを10秒とする例を示したが、余裕時間ΔTを「0」とし、緊急地震速報の受信時刻tRCVが到達予想時刻tPRDを過ぎているときは、直ちに地震対応制御禁止フラグFINHを「1」に設定するようにしてもよい。
【0085】
また上述した実施形態では、高度利用者向け緊急地震速報を受信できる受信装置を用いる例を示したが、一般向け緊急地震速報のみを受信できる受信装置を用いる場合にも本発明を適用することができる。ただし、一般向け緊急地震速報には主要動の到達予想時刻は含まれないので、例えば到達予想時刻を、緊急地震速報受信時刻に、主要動到達までの最大時間(想定値)を加算することにより算出することが望ましい。
【符号の説明】
【0086】
1 受信装置(緊急地震速報受信手段)
2 地震対応制御用電子制御ユニット(地震対応制御手段、フィルタ手段、選択手段、地震対応制御禁止手段、発進禁止手段)
11 アクセルセンサ(操作入力量検出手段)
12 操舵角センサ(操作入力量検出手段)
13 ブレーキセンサ(操作入力量検出手段)
16 制御停止スイッチ
21 エンジン制御用電子制御ユニット(駆動手段)
22 操舵制御用電子制御ユニット(駆動手段)
23 ブレーキ制御用電子制御ユニット(駆動手段)
【技術分野】
【0001】
本発明は、車両の走行制御装置に関し、特に地震発生時に送信される緊急地震速報を受信する機能を有する走行制御装置に関する。
【背景技術】
【0002】
揺れの強い地震が到達すると予想される地域に対して、緊急地震速報を発するサービスが、2007年10月1日から気象庁によって行われている。このサービスは、地震の発生直後に、震源に近い観測点の地震計で測定した地震波データから震源や地震の規模を推定し、できる限り速やかに当該地域で予想される震度等を報知するものである。
【0003】
現在、日本においては、報知される内容が詳細な「高度利用者向け緊急地震速報」と、無用な混乱を避けるために精度を向上させかつ内容を限定した「一般向け緊急地震速報」の2種類の緊急地震速報が提供されている。
【0004】
一般に、車両運転中に地震が起きた場合、車両の走行速度を落とし、左側の路肩に停めることが求められている。同様に、緊急地震速報を受信した場合も、急ブレーキ・急ハンドルを避け、ハザードランプを点滅させ、ゆっくり速度を落とし、左側の路肩に停めることが推奨されている。特に、緊急地震速報を受信していない車両が周辺を走行している可能性があるため、急激な運転操作を行わないように強く注意が促されている。
【0005】
特許文献1には、地震発生時に車両を適切に走行させるための走行制御装置が示されている。この装置によれば、緊急地震速報受信後に、予想震度、倒壊が予測される地域、周辺の障害物の状況、周囲の車両の走行状況に応じて、車両の減速やレーンチェンジ、停止を考慮した走行計画を策定し、その走行計画に基づいて走行制御が行われる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2008−146168号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
2004年及び2005年の試験運用段階の精度評価報告によれば、誤った緊急地震速報が比較的多い(320件中20件が誤報)、あるいは地震(主要動)の到達時刻に間に合わないことが多い(震度5弱以上の16件中、11件で間に合わなかった)といった問題点が指摘されている。
【0008】
また、当該車両の前後を走行する車両や走行レーンの状況、到達予想時刻を組み合わせて走行計画を策定しても、絶えず周囲の環境は変化しており、策定した走行計画が必ずしも妥当なものであるとは限らない。
【0009】
本発明はこの点に着目してなされたものであり、現在普及している車両にすぐにでも適用でき、緊急地震速報を受信したときに適切な車両走行制御を行い、緊急地震速報によって生じることが懸念されているパニックを抑制することができる、車両の走行制御装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
上記目的を達成するため請求項1に記載の発明は、緊急地震速報を受信する緊急地震速報受信手段を備える、車両の走行制御装置において、前記車両の運転者が車両走行制御のために操作する操作手段と、前記運転者が前記操作手段を介して入力した操作入力量(AP,BP,ST)を検出する操作入力量検出手段と、前記操作手段の操作に対応して前記車両の走行状態を制御する制御アクチュエータ(31,32,33)と、前記操作入力量(AP,BP,ST)に応じて前記制御アクチュエータを駆動する駆動手段と、前記緊急地震速報受信手段が前記緊急地震速報を受信した場合において、前記操作入力量(AP,BP,ST)が増加するときは、その増加速度が減少するように前記操作入力量(AP,BP,ST)を補正することにより、補正操作入力量(APC,BPC,STC)を算出する地震対応制御手段とを備え、前記駆動手段は、前記地震対応制御手段が作動しているときは、前記補正操作入力量(APC,BPC,STC)に応じて前記制御アクチュエータを駆動することを特徴とする。
【0011】
請求項2に記載の発明は、請求項1に記載の車両の走行制御装置において、前記運転者が前記地震対応制御手段の作動を停止させるための地震対応制御停止スイッチ(16)をさらに備えることを特徴とする。
【0012】
請求項3に記載の発明は、請求項1または2に記載の車両の走行制御装置において、前記地震対応制御手段は、前記操作入力量(AP,BP,ST)のローパスフィルタ処理を行い、フィルタ処理後操作入力量(APF,BPF,STF)を算出するフィルタ手段と、前記操作入力量(AP,BP,ST)及びフィルタ処理後操作入力量(APF,BPF,STF)の小さい方を選択し、前記補正操作入力量(APC,BPC,STC)として出力する選択手段とを有することを特徴とする
【0013】
請求項4に記載の発明は、請求項1から3のいずれか1項に記載の車両の走行制御装置において、前記緊急地震速報が当該地震の主要動の到達予想時刻(tPRD)を含む場合において、前記緊急地震速報を受信した受信時刻(tRCV)が、前記到達予想時刻(tPRD)を過ぎているとき、または前記受信時刻(tRCV)から前記到達予想時刻(tPRD)までの時間が安全停止時間(TSAFE)より短いときに、前記地震対応制御手段の作動を禁止する地震対応制御禁止手段をさらに備えることを特徴とする。
【0014】
請求項5に記載の発明は、請求項1から4のいずれか1項に記載の車両の走行制御装置において、前記車両の停止中に前記緊急地震速報を受信したときに、前記車両の発進を禁止する発進禁止手段をさらに備えることを特徴とする。
【0015】
請求項6に記載の発明は、請求項1から5のいずれか1項に記載の車両の走行制御装置において、前記操作手段は、前記車両のアクセルペダル、ブレーキペダル、及びステアリングホイールの少なくとも1つであることを特徴とする。
【発明の効果】
【0016】
請求項1に記載の発明によれば、緊急地震速報を受信した場合において、運転者が操作手段を介して入力した操作入力量が増加するときは、その増加速度が減少するように操作入力量を補正することにより、補正操作入力量が算出され、補正操作入力量に応じて車両の走行状態を制御する制御アクチュエータが駆動される。したがって、操作入力量の増加速度が大きいときに、制御アクチュエータの駆動量の変化が抑制される。その結果、緊急地震速報の受信時に適切な車両走行制御を行い、緊急地震速報によって生じることが懸念されているパニックを抑制する効果が得られる。
【0017】
請求項2に記載の発明によれば、地震対応制御停止スイッチを操作することにより、地震対応制御を行わないようにすることができるので、例えば誤報であることが判明したときに、運転者のスイッチ操作によって直ちに通常の走行制御に戻ることができる。
【0018】
請求項3に記載の発明によれば、操作入力量のローパスフィル処理を行うことにより、フィルタ処理後操作入力量が算出され、操作入力量及びフィルタ処理後操作入力量の小さい方が選択され、補正操作入力量として出力される。したがって、操作入力量が増加するときは、おおむね(操作入力量がフィルタ処理後操作入力量より小さいときを除き)フィルタ処理後操作入力量が選択される一方、操作入力量が減少するときは、おおむね(操作入力量がフィルタ処理後操作入力量より大きいときを除き)操作入力量が選択される。その結果、操作入力量の増加速度が大きいときに、制御アクチュエータの駆動量の変化を抑制することができる。
【0019】
請求項4に記載の発明によれば、緊急地震速報が当該地震の主要動の到達予想時刻を含む場合において、緊急地震速報を受信した受信時刻が、到達予想時刻を過ぎているとき、または受信時刻から到達予想時刻までの時間が安全停止時間より短いときに、地震対応制御手段の作動が禁止されるので、地震対応制御を開始しても意味がない場合あるいは安全に停止できないときは、通常の走行制御が継続される。したがって、例えば当該車両が震源地に近い場合などにおいて、地震対応制御が禁止され、迅速な操作を行うことができる。
【0020】
請求項5に記載の発明によれば、車両の停止中に緊急地震速報を受信したときに、車両の発進が禁止されるので、地震が到達する直前に車両を発進させることを回避し、安全を確保できる。
【0021】
請求項6に記載の発明によれば、操作手段は、車両のアクセルペダル、ブレーキペダル、及びステアリングホイールの少なくとも1つであるので、緊急地震速報受信時において、アクセルペダル操作、ブレーキ操作、及び/またはステアリングホイール操作による走行制御を、適切に行うことができる。
【図面の簡単な説明】
【0022】
【図1】本発明の一実施形態にかかる車両の走行制御装置の構成を示すブロック図である。
【図2】緊急地震速報を受信したときに実行され、地震対応制御の禁止判定を行う処理のフローチャートである。
【図3】地震対応制御の実行条件を判定する処理のフローチャートである。
【図4】アクセルペダル操作量(AP)の補正(地震対応制御)を行う処理のフローチャートである。
【図5】図4の処理を説明するためのタイムチャートである。
【図6】ブレーキペダル操作量(BP)の補正(地震対応制御)を行う処理のフローチャートである。
【図7】ステアリングホイールの操舵角(ST)の補正(地震対応制御)を行う処理のフローチャートである。
【図8】車両の発進禁止判定を行う処理のフローチャートである。
【発明を実施するための形態】
【0023】
以下本発明の実施の形態を図面を参照して説明する。
図1は本発明の一実施形態にかかる車両の走行制御装置の構成を示す図である。当該車両は、内燃機関(以下「エンジン」という)により駆動される自動車であり、ステアリングホイール、アクセルペダル、ブレーキペダル、自動変速機、自動変速機のレンジ選択レバーなどを備えており、さらに緊急地震速報を受信する受信装置1と、受信装置1が緊急地震速報を受信したときに、地震対応制御を行うための地震対応制御用電子制御ユニット(以下「EQC−ECU」という)2と、緊急地震速報に関連する情報を表示する表示部3とを備えている。受信装置1は、高度利用者向け緊急地震速報を受信できるものである。
【0024】
EQC−ECU2には、アクセルペダルの踏み込み量(以下「アクセルペダル操作量」という)APを検出するアクセルセンサ11、ステアリングホイールの操舵角STを検出する操舵角センサ12、ブレーキペダルの踏み込み量(以下「ブレーキペダル操作量」という)BPを検出するブレーキセンサ13、車速VPを検出する車速センサ14、及び自動変速機のレンジ選択レバーの位置(以下「シフト位置」という)SPを検出するシフト位置センサ15が接続されており、これらのセンサの検出信号が、EQC−ECU2に供給される。なお、本実施形態では、操舵角STはステアリングホイールを右方向に操作したとき正の値をとり、左方向に操作したとき負の値をとる。
【0025】
またEQC−ECU2には、当該車両の運転者が、緊急地震速報に対応する地震対応制御を停止させるための制御停止スイッチ16が接続されており、制御停止スイッチ16のオンオフ信号が、EQC−ECU2に供給される。
【0026】
EQC−ECU2の出力側には、エンジン制御用電子制御ユニット(以下「ENG−ECU」という)21と、転舵制御用電子制御ユニット22と、ブレーキ制御用電子制御ユニット23とが接続されている。
【0027】
EQC−ECU2は、各種センサからの入力信号波形を整形し、電圧レベルを所定レベルに修正し、アナログ信号値をデジタル信号値に変換する等の機能を有する入力回路、中央演算処理回路(以下「CPU」という)、CPUで実行される各種演算プログラム及び演算結果等を記憶する記憶回路、及び表示部3、ENG−ECU21などに制御信号を供給する出力回路を備えている。
【0028】
EQC−ECU2は、緊急地震速報の受信直後以外は、検出されるアクセルペダル操作量AP、操舵角ST、及びブレーキペダル操作量BPを、補正することなく、それぞれENG−ECU21、STR−ECU22、及びBRK−ECU23に出力する。緊急地震速報を受信したときは、後述する地震対応制御を実行し、アクセルペダル操作量AP、操舵角ST、及びブレーキペダル操作量BPの補正を行い、補正アクセルペダル操作量APC、補正操舵角STC、及び補正ブレーキペダル操作量BPCを出力する。
【0029】
ENG−ECU21は、EQC−ECU2から供給される補正アクセルペダル操作量APC(無補正時はアクセルペダル操作量APと等しい)に応じたスロットル弁の駆動制御信号を、エンジンのスロットル弁を駆動するスロットル制御アクチュエータ31に供給する。これにより、エンジン1の出力トルクが、補正アクセルペダル操作量APCに応じて制御される。
【0030】
STR−ECU22は、EQC−ECU2から供給される補正操舵角STC(無補正時は操舵角STと等しい)に応じた転舵機構の駆動制御信号を、転舵機構を駆動する転舵制御アクチュエータ32に供給する。これにより、車両の転舵輪の転舵角が、補正操舵角STCに応じて制御される。
【0031】
BRK−ECU23は、EQC−ECU2から供給される補正ブレーキペダル操作量BPC(無補正時はブレーキペダル操作量BPと等しい)に応じたブレーキ機構の駆動制御信号を、ブレーキ機構を駆動するブレーキ制御アクチュエータ33に供給する。これにより、車両のブレーキが、補正ブレーキペダル操作量BPCに応じて制御される。
【0032】
図2は、制御禁止判定処理のフローチャートである。この処理は、EQC−ECU2のCPUで、所定時間TCAL(例えば100msec)毎に実行される。
ステップS10では、緊急地震速報受信を受信したか否かを判別し、受信したときは受信フラグFRCVを「1」に設定する(ステップS11)。受信していないときは直ちにステップS12に進む。
【0033】
ステップS12では、受信フラグFRCVが「1」であるか否かを判別し、その答が否定(NO)であるときは、地震対応制御禁止フラグFINHを「1」に設定する(ステップS13)。地震対応制御禁止フラグFINHが「1」に設定されると、地震対応制御の実行が禁止される。
【0034】
ステップS12でFRCV=1であるときは、ステップS14に進み、現在時刻tが、緊急地震速報に含まれる主要動の到達予想時刻tPRDに余裕時間ΔT(例えば10秒)を加算した時刻より前であるか否かを判別する。その答が否定(NO)であるときは、受信フラグFRCVを「0」に戻し(ステップS15)、地震対応制御禁止フラグFINHを「1」に設定する(ステップS18)。
【0035】
ステップS14で現在時刻tが到達予想時刻tPRDに余裕時間ΔTを加算した時刻より前であるときは、受信時刻tRCVから到達予想時刻tPRDまでの時間が、車両の安全停止時間TSAFEより短いか否かを判別する(ステップS16)。安全停止時間TSAFEは、例えば下記式(1)により算出される。式(1)のkSTPは、予め実験的に決定される換算係数である。すなわち、安全停止時間TSAFEは車速VPに比例するように設定される。
TSAFE=kSTP×VP (1)
【0036】
なお、式(1)を用いることに代えて、車速VPに応じたTSAFEテーブルを予め設定しておき、テーブル検索により、安全停止時間TSAFEを算出するようにしてもよい。
【0037】
ステップS16の答が否定(NO)であるときは、地震対応制御禁止フラグFINHを「0」に設定する(ステップS17)。一方、ステップS16の答が肯定(YES)であって、主要動が到達するまでの時間が安全停止時間TSAFEより短いときは、ステップS18に進み、地震対応制御禁止フラグFINHを「1」に設定する。
【0038】
図3は、地震対応制御の実行条件を判定する処理のフローチャートである。この処理は、EQC−ECU2のCPUで所定時間TCAL毎に実行される。
ステップS21では、地震対応制御禁止フラグFINHが「1」であるか否かを判別し、その答が否定(NO)であるときは、制御停止スイッチ16がオフ状態であるか否かを判別する(ステップS22)。
【0039】
ステップS21の答が肯定(YES)またはステップS22の答が否定(NO)であるとき、すなわち地震対応制御禁止フラグFINHが「1」であるとき、または制御停止スイッチ16がオン状態であるときは、制御実行フラグFREQを「0」に設定する(ステップS24)。
【0040】
一方、ステップS22の答が肯定(YES)であるときは、制御実行フラグFREQを「1」に設定する。制御実行フラグFREQが「1」に設定されると、地震対応制御が実行される。
【0041】
図3の処理により、地震対応制御禁止フラグFINHが「0」でかつ制御停止スイッチ16がオフ状態であれば、地震対応制御が実行される。また制御停止スイッチ16がオンされると直ちに地震対応制御が中止される。
【0042】
図4は、アクセルペダル操作量APを補正し、補正アクセルペダル操作量APCを算出する処理のフローチャートである。この処理は、EQC−ECU2のCPUで所定時間TCAL毎に実行される。
【0043】
ステップS31では、アクセルペダル操作量APのローパスフィルタ処理を行い、フィルタ処理後アクセルペダル操作量APFを算出する。具体的には、下記式(2)にアクセルペダル操作量AP(k)を適用して、フィルタ処理後アクセルペダル操作量APFを算出する。
APF=CFAP×AP(k)+(1−CFAP)×APF(k-1) (2)
ここでCFAPは、フィルタ係数であり、例えば0.01に設定される。「k」は、この処理の実行周期である所定時間TCALで離散化した離散化時刻であり、(k)は今回値であることを示すが、通常は省略されている。
【0044】
ステップS32では、制御実行フラグFREQが「1」であるか否かを判別し、その答が否定(NO)であるときは、第1過渡制御カウンタCTFLTの値を「256」に設定する(ステップS36)。第1過渡制御カウンタCTFLTは、後述するステップS34及びS35の処理で使用される。
【0045】
ステップS37では、下記式(3)により過渡制御値APTEMPを算出する。式(3)のCTNOFLTは、ステップS33で「256」に設定される第2過渡制御カウンタであり、地震対応制御を終了した直後は「256」に設定されている。
APTEMP={APF×CTNOFLT
+AP(k)×(256−CTNOFLT)}/256 (3)
【0046】
ステップS38では、第2過渡制御カウンタCTNOFLTの値を「1」だけデクリメントする。このとき、第2過渡制御カウンタCTNOFLTの値が負の値とならないようにリミット処理が行われる。
【0047】
したがって、ステップS37及びS38を繰り返し実行することにより、過渡制御値APTEMPは、地震対応制御終了直後は、フィルタ処理後アクセルペダル操作量APFに等しく、その後徐々にアクセルペダル操作量AP(k)に近づいていき、第2過渡制御カウンタCTNOFLTの値が「0」となったとき、アクセルペダル操作量AP(k)と一致する。
【0048】
ステップS39では、下記式(4)により、過渡制御値APTEMPと、アクセルペダル操作量AP(k)の小さい方を選択することにより、補正アクセルペダル操作量APCを算出する。
APC=min(APTEMP,AP(k)) (4)
【0049】
ステップS32でFREQ=1であって、地震対応制御を実行するときは、第2過渡制御カウンタCTNOFLTの値を「256」に設定する(ステップS33)。ステップS34では、下記式(5)により過渡制御値APTEMPを算出する。式(5)のCTFLTは、ステップS36で「256」に設定される第1過渡制御カウンタであり、地震対応制御を開始した直後は「256」に設定されている。
APTEMP={AP(k)×CTFLT
+APF×(256−CTFLT)}/256 (5)
【0050】
ステップS35では、第1過渡制御カウンタCTFLTの値を「1」だけデクリメントする。このとき、第1過渡制御カウンタCTFLTの値が負の値とならないようにリミット処理が行われる。ステップS35を実行した後は、ステップS39に進む。
【0051】
したがって、ステップS34及びS35を繰り返し実行することにより、過渡制御値APTEMPは、地震対応制御開始直後は、アクセルペダル操作量AP(k)に等しく、その後徐々にフィルタ処理後アクセルペダル操作量APFに近づいていき、第1過渡制御カウンタCTFLTの値が「0」となったとき、フィルタ処理後アクセルペダル操作量APFと一致する。
【0052】
図4の処理により算出された補正アクセルペダル操作量APCは、ENG−ECU21に供給され、補正アクセルペダル操作量APCに応じたスロットル制御アクチュエータの駆動制御が行われる。
【0053】
図5は、図4の処理を説明するためのタイムチャートであり、時刻t1に地震対応制御が開始され、時刻t6に終了した例が示されている。図5(a)〜図5(c)は、それぞれ制御実行フラグFREQ、第1過渡制御カウンタCTFLTの値、及び第2過渡制御カウンタCTNOFLTの値の推移を示し、図5(d)は、アクセルペダル操作量AP(実線L1)、フィルタ処理後アクセルペダル操作量APF(破線L2)、及び補正アクセルペダル操作量APC(太い破線
L3)の推移を示す。また時刻t1〜t2の間のみ、過渡制御値APTEMP(一点鎖線L4)が示されている。
【0054】
時刻t1からt3までの間では、過渡制御値APTEMPがアクセルペダル操作量APと、フィルタ処理後アクセルペダル操作量APFとの間の値をとるが、時刻t1からt2の間では、アクセルペダル操作量APが過渡制御値APTEMPより小さいため、補正アクセルペダル操作量APCは、アクセルペダル操作量APと等しい。
【0055】
時刻t2からt3の間では、補正アクセルペダル操作量APCは過渡制御値APTEMPに設定される。時刻t3からt6までは、過渡制御値APTEMPはフィルタ処理後アクセルペダル操作量APFと等しくなる。
【0056】
補正アクセルペダル操作量APCは、時刻t3からt4までは、フィルタ処理後アクセルペダル操作量APFと等しくなり、時刻t4からt5まではアクセルペダル操作量APと等しくなり、時刻t5からt6まではフィルタ処理後アクセルペダル操作量APFと等しくなる。
【0057】
時刻t6に地震対応制御が終了すると、時刻t8までは過渡制御値APTEMPは、アクセルペダル操作量APとフィルタ処理後アクセルペダル操作量APFの間の値をとるが、時刻t7からt8の間ではほぼアクセルペダル操作量APと一致しているため、図示が省略されている。補正アクセルペダル操作量APCは、時刻t6からt7までは過渡制御値APTEMPに設定され、時刻t7以後はアクセルペダル操作量APと等しくなる。
【0058】
以上のように図4の処理によれば、地震対応制御中は、アクセルペダル操作量APが増加するときは、アクセルペダル操作量APがフィルタ処理後アクセルペダル操作量APFより小さいときを除き、その増加方向の変化量が減少する(増加速度が減少する)ようにアクセルペダル操作量APを補正する一方、アクセルペダル操作量APが減少するときは、アクセルペダル操作量APがフィルタ処理後アクセルペダル操作量APFより大きいときを除き、アクセルペダル操作量APをそのまま採用することにより、補正アクセルペダル操作量APCが算出される。したがって、急激なアクセルペダル操作量APの増加が抑制され、スロットル制御アクチュエータの駆動量の変化が抑制される。その結果、緊急地震速報の受信時に適切なエンジン出力制御を行い、緊急地震速報によって生じることが懸念されているパニックを抑制する効果が得られる。
【0059】
図6は、検出されるブレーキペダル操作量BPに応じて補正ブレーキペダル操作量BPCを算出する処理のフローチャートである。この処理は、EQC−ECU2のCPUで所定時間TCAL毎に実行される。図6に示す処理は、基本的に図4の処理と同様の処理であり、図4の処理の終了後、続けて実行される。
【0060】
図6のステップS41では、ブレーキペダル操作量BPのローパスフィルタ処理を行い、フィルタ処理後ブレーキペダル操作量BPFを算出する。具体的には、下記式(6)にブレーキペダル操作量BP(k)を適用して、フィルタ処理後ブレーキペダル操作量BPFを算出する。
BPF=CFBP×BP(k)+(1−CFBP)×BPF(k-1) (6)
ここでCFBPは、フィルタ係数であり、例えば式(2)のフィルタ係数CFAPと同一の値に設定される。なお、フィルタ係数CFBPをフィルタ係数CFAPと異なる値に設定するようにしてもよい。
【0061】
ステップS42で制御実行フラグFREQが「1」であるか否かを判別し、その答が否定(NO)であるときは、下記式(7)により過渡制御値BPTEMPを算出する(ステップS47)。式(7)のCTNOFLTは、図4の処理で更新される第2過渡制御カウンタCTNOFLTの値がそのまま適用される。
BPTEMP={BPF×CTNOFLT
+BP(k)×(256−CTNOFLT)}/256 (7)
【0062】
ステップS42でFREQ=1であるときは、下記式(8)により過渡制御値BPTEMPを算出する(ステップS44)。式(8)のCTFLTは、図4の処理で更新される第1過渡制御カウンタCTFLTの値がそのまま適用される。
BPTEMP={BP(k)×CTFLT
+BPF×(256−CTFLT)}/256 (8)
【0063】
ステップS49では、下記式(9)により、過渡制御値BPTEMPと、ブレーキペダル操作量BP(k)の小さい方を選択することにより、補正ブレーキペダル操作量BPCを算出する。
BPC=min(BPTEMP,BP(k)) (9)
【0064】
図6の処理により、地震対応制御中は、ブレーキペダル操作量BPが増加するときは、ブレーキペダル操作量BPがフィルタ処理後ブレーキペダル操作量BPFより小さいときを除き、その増加方向の変化量が減少する(増加速度が減少する)ように補正する一方、ブレーキペダル操作量BPが減少するときは、ブレーキペダル操作量BPがフィルタ処理後ブレーキペダル操作量BPFより大きいときを除き、ブレーキペダル操作量BPをそのまま採用することにより、補正ブレーキペダル操作量BPCが算出される。したがって、急激なブレーキペダル操作量BPの増加が抑制され、ブレーキ制御アクチュエータ33の駆動量の変化が抑制される。その結果、緊急地震速報の受信時に適切なブレーキ制御を行い、緊急地震速報によって生じることが懸念されているパニックを抑制する効果が得られる。
【0065】
図7は、検出される操舵角STに応じて補正操舵角STCを算出する処理のフローチャートである。この処理は、EQC−ECU2のCPUで所定時間TCAL毎に実行される。図7に示す処理は、基本的に図4の処理と同様の処理であり、図4の処理の終了後、続けて実行される。
【0066】
図7のステップS51では、操舵角STのローパスフィルタ処理を行い、フィルタ処理後操舵角STFを算出する。具体的には、下記式(10)に操舵角ST(k)を適用して、フィルタ処理後操舵角STFを算出する。
STF=CFST×ST(k)+(1−CFST)×STF(k-1) (10)
ここでCFSTは、フィルタ係数であり、例えば式(2)のフィルタ係数CFAPと同一の値に設定される。なお、フィルタ係数CFSTをフィルタ係数CFAPと異なる値に設定するようにしてもよい。
【0067】
ステップS52で制御実行フラグFREQが「1」であるか否かを判別し、その答が否定(NO)であるときは、下記式(11)により過渡制御値STTEMPを算出する(ステップS57)。式(11)のCTNOFLTは、図4の処理で更新される第2過渡制御カウンタCTNOFLTの値がそのまま適用される。
STTEMP={STF×CTNOFLT
+ST(k)×(256−CTNOFLT)}/256 (11)
【0068】
ステップS52でFREQ=1であるときは、下記式(12)により過渡制御値STTEMPを算出する(ステップS54)。式(12)のCTFLTは、図4の処理で更新される第1過渡制御カウンタCTFLTの値がそのまま適用される。
STTEMP={ST(k)×CTFLT
+STF×(256−CTFLT)}/256 (12)
【0069】
ステップS59では、下記式(13)により、過渡制御値STTEMPの絶対値と、操舵角ST(k)の絶対値の小さい方を選択することにより、補正操舵角STCの絶対値を算出し、式(14)によって補正操舵角STCを算出する。
|STC|=min(|STTEMP|,|ST(k)|) (13)
STC=|STC|×ST(k)/|ST(k)| (14)
【0070】
図7の処理により、地震対応制御中は、操舵角STの絶対値が増加するときは、絶対値|ST|がフィルタ処理後操舵角STFの絶対値より小さいときを除き、絶対値|ST|の増加方向の変化量が減少する(増加速度が減少する)ように操舵角STを補正する一方、操舵角STの絶対値が減少するときは、絶対値|ST|がフィルタ処理後操舵角STFの絶対値より大きいときを除き、操舵角STをそのまま採用することにより、補正操舵角STCが算出される。したがって、操舵角STの絶対値の急激な増加が抑制され、転舵制御アクチュエータ32の駆動量の変化が抑制される。その結果、緊急地震速報の受信時に適切な転舵制御を行い、緊急地震速報によって生じることが懸念されているパニックを抑制する効果が得られる。
【0071】
図8は、車両の発進禁止判定を行う処理のフローチャートある。この処理は、EQC−ECU2のCPUで所定時間TCAL毎に実行される。
ステップS61では、受信フラグFRCVが「1」であるか否かを判別し、その答が肯定(YES)であるときは、車速VPが「0」であるか否かを判別する(ステップS62)。ステップS61またはS62の答が否定(NO)であるときは、発進禁止フラグFSTINHを「0」に設定する(ステップS66)。
【0072】
ステップS62の答が肯定(YES)、すなわち当該車両が停止しているときは、シフト位置SPがPレンジであるか否かを判別する(ステップS63)。この答が肯定(YES)であるときは、発進禁止フラグFSTINHを「1」に設定する。ステップS63の答が否定(NO)、すなわちシフト位置SPがPレンジ以外のレンジであるときは、発進許可フラグFSTが「1」であるか否かを判別する。
【0073】
発進許可フラグFSTは、例えばシフト位置SPがDレンジとNレンジとの間の切換が2回連続して行われたときに「1」に設定される。そのような場合には、運転者が明確な発進意思表示をしたものと認識して、ステップS66に進み、発進禁止フラグFSTINHを「0」に設定する。
【0074】
ステップS64の答が否定(NO)であるときは、発進禁止フラグFSTINHを「1」に設定する(ステップS65)。
【0075】
発進禁止フラグFSTINHに関する情報は、ENG−ECU21に供給され、ENG−ECU21は、発進禁止フラグFSTINHが「1」に設定されたときは、例えばエンジンへの点火信号を供給しないことにより、強制的にエンジンの始動を禁止し、あるいは作動を停止させる。
【0076】
以上のように本実施形態では、緊急地震速報を受信した場合において、運転者がアクセルペダルなどを介して入力したアクセルペダル操作量APが増加するときは、その増加速度が減少するようにアクセルペダル操作量APを補正することにより、補正アクセルペダル操作量APCが算出され、補正アクセルペダル操作量APCに応じて車両の走行状態を制御する制御アクチュエータ31が駆動される。また、ブレーキペダル操作量BP及び操舵角STについても同様にして補正ブレーキペダル操作量BPC及び補正操舵角STCが算出され、補正ブレーキペダル操作量BPC及び補正操舵角STCに応じて対応する制御アクチュエータ32,33が駆動される。したがって、アクセルペダル操作量AP、ブレーキペダル操作量BP、及び操舵角STの絶対値の増加速度が大きいときに、制御アクチュエータ31〜33の駆動量の変化が抑制される。その結果、緊急地震速報の受信時に適切な車両走行制御を行い、緊急地震速報によって生じることが懸念されているパニックを抑制する効果が得られる。
【0077】
また運転者が制御停止スイッチ16をオン操作することにより、地震対応制御を行わないようにすることができるので、例えば誤報であることが判明したときに、運転者のスイッチ操作によって直ちに通常の走行制御に戻ることができる。
【0078】
またアクセルペダル操作量APのローパスフィル処理を行うことにより、フィルタ処理後アクセルペダル操作量APFが算出され、アクセルペダル操作量AP及びフィルタ処理後アクセルペダル操作量APFの小さい方が選択され、補正アクセルペダル操作量APCとして出力される。ブレーキペダル操作量BPについても同様に選択が行われ、操舵角STについては操舵角ST及びフィルタ処理後操舵角STFのうち絶対値の小さい方が選択され、補正操舵角STCとして出力される。したがって、アクセルペダル操作量AP若しくはブレーキペダル操作量BPが増加するときは、または操舵角STの絶対値が増加するときは、おおむねフィルタ処理後アクセルペダル操作量APF、フィルタ処理後ブレーキペダル操作量BPF、またはフィルタ処理後操舵角STFが選択され、操作入力量AP,BP,または|ST|の増加速度が大きいときに、制御アクチュエータの駆動量の変化を抑制することができる。
【0079】
また緊急地震速報の受信時刻tRCVが、到達予想時刻tPRDを過ぎているとき、または受信時刻tRCVから到達予想時刻tPRDまでの時間が安全停止時間TSAFEより短いときに、地震対応制御が禁止されるので、地震対応制御を開始しても意味がない場合あるいは安全に停止できないときは、通常の走行制御が継続される。したがって、例えば当該車両が震源地に近い場合などにおいて、地震対応制御が禁止され、迅速な操作を行うことができる。
【0080】
また車両の停止中に緊急地震速報を受信したときに、原則として車両の発進が禁止されるので、地震が到達する直前に車両を発進させることを回避し、安全を確保できる。
【0081】
本実施形態では、受信装置1が緊急地震速報受信手段に相当し、アクセルペダル、ブレーキペダル、及びステアリングホイールが操作手段に相当し、アクセルセンサ11、操舵角センサ12、及びブレーキセンサ13が操作入力量検出手段に相当し、EQC−ECU2,ENG−ECU21,STR−ECU22,及びBRK−ECU23が駆動手段に相当する。また、EQC−ECU2が、地震対応制御手段、フィルタ手段、選択手段、地震対応制御禁止手段、及び発進禁止手段を構成する。
【0082】
なお本発明は上述した実施形態に限るものではなく、種々の変形が可能である。例えば、上述した実施形態では、アクセルペダル操作量AP、ブレーキペダル操作量BP、及び操舵角STのすべてについて地震対応制御を行うようにしたが、これらの操作量のうちいずれか1つまたは2つについて、地震対応制御を行うようにしてもよい。
【0083】
また緊急地震速報を携帯電話で受信し、受信した緊急地震速報をEQC−ECU2に入力できる構成を採用してもよい。
また上述した実施形態では、緊急地震速報及び関連情報を表示装置により運転者に提供するようにしたが、音声出力装置によって提供するようにしてもよい。
【0084】
また上述した実施形態では、図2のステップS14の判別に適用する余裕時間ΔTを10秒とする例を示したが、余裕時間ΔTを「0」とし、緊急地震速報の受信時刻tRCVが到達予想時刻tPRDを過ぎているときは、直ちに地震対応制御禁止フラグFINHを「1」に設定するようにしてもよい。
【0085】
また上述した実施形態では、高度利用者向け緊急地震速報を受信できる受信装置を用いる例を示したが、一般向け緊急地震速報のみを受信できる受信装置を用いる場合にも本発明を適用することができる。ただし、一般向け緊急地震速報には主要動の到達予想時刻は含まれないので、例えば到達予想時刻を、緊急地震速報受信時刻に、主要動到達までの最大時間(想定値)を加算することにより算出することが望ましい。
【符号の説明】
【0086】
1 受信装置(緊急地震速報受信手段)
2 地震対応制御用電子制御ユニット(地震対応制御手段、フィルタ手段、選択手段、地震対応制御禁止手段、発進禁止手段)
11 アクセルセンサ(操作入力量検出手段)
12 操舵角センサ(操作入力量検出手段)
13 ブレーキセンサ(操作入力量検出手段)
16 制御停止スイッチ
21 エンジン制御用電子制御ユニット(駆動手段)
22 操舵制御用電子制御ユニット(駆動手段)
23 ブレーキ制御用電子制御ユニット(駆動手段)
【特許請求の範囲】
【請求項1】
緊急地震速報を受信する緊急地震速報受信手段を備える、車両の走行制御装置において、
前記車両の運転者が車両走行制御のために操作する操作手段と、
前記運転者が前記操作手段を介して入力した操作入力量を検出する操作入力量検出手段と、
前記操作手段の操作に対応して前記車両の走行状態を制御する制御アクチュエータと、
前記操作入力量に応じて前記制御アクチュエータを駆動する駆動手段と、
前記緊急地震速報受信手段が前記緊急地震速報を受信した場合において、前記操作入力量が増加するときは、その増加速度が減少するように前記操作入力量を補正することにより、補正操作入力量を算出する地震対応制御手段とを備え、
前記駆動手段は、前記地震対応制御手段が作動しているときは、前記補正操作入力量に応じて前記制御アクチュエータを駆動することを特徴とする車両の走行制御装置。
【請求項2】
前記運転者が前記地震対応制御手段の作動を停止させるための地震対応制御停止スイッチをさらに備えることを特徴とする請求項1に記載の車両の走行制御装置。
【請求項3】
前記地震対応制御手段は、前記操作入力量のローパスフィル処理を行い、フィルタ処理後操作入力量を算出するフィルタ手段と、前記操作入力量及びフィルタ処理後操作入力量の小さい方を選択し、前記補正操作入力量として出力する選択手段とを有することを特徴とする請求項1または2に記載の車両の走行制御装置。
【請求項4】
前記緊急地震速報が当該地震の主要動の到達予想時刻を含む場合において、前記緊急地震速報を受信した受信時刻が、前記到達予想時刻を過ぎているとき、または前記受信時刻から前記到達予想時刻までの時間が安全停止時間より短いときに、前記地震対応制御手段の作動を禁止する地震対応制御禁止手段をさらに備えることを特徴とする請求項1から3のいずれか1項に記載の車両の走行制御装置。
【請求項5】
前記車両の停止中に前記緊急地震速報を受信したときに、前記車両の発進を禁止する発進禁止手段をさらに備えることを特徴とする請求項1から4のいずれか1項に記載の車両の走行制御装置。
【請求項6】
前記操作手段は、前記車両のアクセルペダル、ブレーキペダル、及びステアリングホイールの少なくとも1つであることを特徴とする請求項1から5のいずれか1項に記載の車両の走行制御装置。
【請求項1】
緊急地震速報を受信する緊急地震速報受信手段を備える、車両の走行制御装置において、
前記車両の運転者が車両走行制御のために操作する操作手段と、
前記運転者が前記操作手段を介して入力した操作入力量を検出する操作入力量検出手段と、
前記操作手段の操作に対応して前記車両の走行状態を制御する制御アクチュエータと、
前記操作入力量に応じて前記制御アクチュエータを駆動する駆動手段と、
前記緊急地震速報受信手段が前記緊急地震速報を受信した場合において、前記操作入力量が増加するときは、その増加速度が減少するように前記操作入力量を補正することにより、補正操作入力量を算出する地震対応制御手段とを備え、
前記駆動手段は、前記地震対応制御手段が作動しているときは、前記補正操作入力量に応じて前記制御アクチュエータを駆動することを特徴とする車両の走行制御装置。
【請求項2】
前記運転者が前記地震対応制御手段の作動を停止させるための地震対応制御停止スイッチをさらに備えることを特徴とする請求項1に記載の車両の走行制御装置。
【請求項3】
前記地震対応制御手段は、前記操作入力量のローパスフィル処理を行い、フィルタ処理後操作入力量を算出するフィルタ手段と、前記操作入力量及びフィルタ処理後操作入力量の小さい方を選択し、前記補正操作入力量として出力する選択手段とを有することを特徴とする請求項1または2に記載の車両の走行制御装置。
【請求項4】
前記緊急地震速報が当該地震の主要動の到達予想時刻を含む場合において、前記緊急地震速報を受信した受信時刻が、前記到達予想時刻を過ぎているとき、または前記受信時刻から前記到達予想時刻までの時間が安全停止時間より短いときに、前記地震対応制御手段の作動を禁止する地震対応制御禁止手段をさらに備えることを特徴とする請求項1から3のいずれか1項に記載の車両の走行制御装置。
【請求項5】
前記車両の停止中に前記緊急地震速報を受信したときに、前記車両の発進を禁止する発進禁止手段をさらに備えることを特徴とする請求項1から4のいずれか1項に記載の車両の走行制御装置。
【請求項6】
前記操作手段は、前記車両のアクセルペダル、ブレーキペダル、及びステアリングホイールの少なくとも1つであることを特徴とする請求項1から5のいずれか1項に記載の車両の走行制御装置。
【図1】


【図2】
【図3】
【図4】

【図5】
【図6】

【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2010−253964(P2010−253964A)
【公開日】平成22年11月11日(2010.11.11)
【国際特許分類】
【出願番号】特願2009−102529(P2009−102529)
【出願日】平成21年4月21日(2009.4.21)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
【公開日】平成22年11月11日(2010.11.11)
【国際特許分類】
【出願日】平成21年4月21日(2009.4.21)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
[ Back to top ]