
車両の走行制御装置
【課題】最大駆動力の比較的小さい車両であって、走行モードとして複数のモードを有している場合に、各走行モードでの駆動力特性に差を設ける。
【解決手段】運転者が走行モードとしてS(ノーマル)モード或いはI(エコノミー)モードが選択されている場合は、目標駆動力に基づいてエンジン制御と変速制御を行う。一方、走行モードとしてS#(スポーツモード)が選択されている場合、エンジン制御と変速制御とは独立となり、エンジン制御はアクセル開度APとエンジン回転数Neとに基づき、S#モードマップを参照して目標トルクτeを設定し(S12)、この目標トルクτeに対応する目標スロットル開度を設定する(S13)。又、変速制御は車速Vspとスロットル開度SVとに基づき目標変速段を設定する(S31)。
【解決手段】運転者が走行モードとしてS(ノーマル)モード或いはI(エコノミー)モードが選択されている場合は、目標駆動力に基づいてエンジン制御と変速制御を行う。一方、走行モードとしてS#(スポーツモード)が選択されている場合、エンジン制御と変速制御とは独立となり、エンジン制御はアクセル開度APとエンジン回転数Neとに基づき、S#モードマップを参照して目標トルクτeを設定し(S12)、この目標トルクτeに対応する目標スロットル開度を設定する(S13)。又、変速制御は車速Vspとスロットル開度SVとに基づき目標変速段を設定する(S31)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、走行状態に応じて、エンジン制御と変速制御とを連動する駆動力制御と、エンジン制御と変速制御とを独立に制御する駆動トルク制御とを切替える車両の走行制御装置に関する。
【背景技術】
【0002】
従来、無段変速機(CVT)や、遊星歯車機構等の多段変速機等を備える自動変速機では、セレクトレバーをD(ドライブ)レンジにセットすることで、変速比(変速段)が運転状態に応じて自動的に設定される自動変速モード以外に、セレクトレバーをM(マニュアルシフト)レンジにセットすることで運転者がマニュアルトランスミッション(MT)車のように、変速段を任意に選択することのできるマニュアルシフトモード(Mモード)を備えているものが知られている。
【0003】
又、最近では、エンジン制御と変速制御とを連動させる協調制御の技術も知られており、特許文献1(特開2002−192988号公報)等に開示されている。同文献では、エンジン制御と変速制御とを協調させるに際し、エンジン制御では、アクセル開度と車速とをパラメータとしてマップ参照により目標駆動力を設定し、この目標駆動力に勾配抵抗を加算して、最終目標駆動力を設定する。そして、この最終目標駆動力を自動変速機の現在の変速比で除算して目標エンジントルクを算出し、この目標エンジントルクとエンジン回転数とをパラメータとして目標スロットル開度を設定する。その後、電子制御スロットルのスロットル弁開度が目標スロットル開度になるように制御する。一方、変速制御では、最終目標駆動力と車速とをパラメータとしてマップ参照により変速制御用アクセル開度を設定し、この変速制御用アクセル開度と車速とをパラメータとして、変速マップを参照して目標変速段を設定し、現在の変速段を目標変速段に遷移させる。
【0004】
その結果、引用文献1に開示されている技術では、エンジン制御と変速制御とが協調されて、最終目標駆動力を達成する制御が実行される。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2002−192988号公報
【特許文献2】特許第3930529号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、1台の車両で少なくとも2つの異なる駆動力特性を有し、運転者が、その走行モードの中から1つのモードを選択することで、エンジン出力特性が切り替わると共に、それに対応して自動変速機の変速特性が変更されるエンジン制御技術が知られている。例えば特許文献2(特許第3930529号公報)には、異なる駆動力特性を有する3種類のモード(ノーマルモード、セーブモード(エコノミーモードとも言う)、パワーモード(スポーツモードとも言う))マップを有し、運転者が1つの走行モードを選択すると、対応するモードマップに従いエンジンが制御されると共に、選択した走行モードに対応する変速パターンで変速制御を行う技術が開示されている。
【0007】
このような、複数の走行モードで制御可能なエンジンを搭載する車両において、エンジン制御と変速制御とを、最終目標駆動力が得られるように協調して制御しようとした場合、この最終目標駆動力はエンジントルクと変速比との乗算値であるため、燃費性能等の性能制約により、目標駆動力を達成するために最適なエンジントルクと変速比の組み合わせが自ずと決まる。
【0008】
例えば、複数の走行モード間において、目標駆動力を車速とアクセル開度等で夫々別に設定した場合、車速とアクセル開度が異なる場合でも、目標駆動力が同じ値で有るならば、前記の通りに最適な組合せは不変である為、エンジントルクと変速比の関係は同じとなってしまう。又、各走行モード間で発生させる最大駆動力に差が無い場合は、アクセル開度が全開に近づく程、各走行モード間での発生駆動力の差が少なくなってしまう。
【0009】
特に、エンジン排気量が比較的小さく、最大駆動力の小さい車両では、エンジンの常用使用回転数領域が比較的高回転側に設定され易くなる上、最大駆動力が小さいが故に各走行モードでの駆動力特性に差別化を図る事が生じ難くなり、運転者に違和感を与えてしまう不都合がある。
【0010】
本発明は、上記事情に鑑み、走行モードとして複数のモードを有している場合であっても、各走行モードでの駆動力特性に差を設けて、運転者に与える違和感を軽減することのできる車両の走行制御装置を提供することを目的とする。
【課題を解決するための手段】
【0011】
本発明は、異なる駆動力特性を有する複数の走行モードの中から1つの走行モードを選択するモード選択手段と、前記モード選択手段で選択した1つの前記走行モードに対応するエンジンモードでエンジンを制御すると共に、選択した前記走行モードに対応する変速モードで自動変速機の変速を制御する走行制御手段とを有し、前記走行制御手段は、車両の運転状態に基づいて目標駆動力を設定し、該目標駆動力に基づいて前記エンジンの制御と前記自動変速機の変速制御とを協調制御する車両の走行制御装置において、前記走行制御手段は、前記走行モードとしてアクセル操作量に対する駆動力の応答性が高くなるように設定されているスポーツモードを有し、少なくとも前記走行モードとして該スポーツモードが選択された場合は前記エンジンの制御と前記自動変速機の変速制御とを、所定のパラメータに基づいて独立に制御する。
【発明の効果】
【0012】
本発明によれば、通常の走行モードはエンジン制御と変速制御とを駆動力制御で協調制御し、走行モードとしてスポーツモードが選択された場合、エンジン制御と変速制御とを独立に制御させるようにしたので、走行モードとして複数のモードを有している場合であっても、各走行モードでの駆動力特性に差を設けて、運転者に与える違和感を軽減することができる。
【図面の簡単な説明】
【0013】
【図1】第1実施形態によるエンジン及び自動変速機のシステム構成図
【図2】同、エンジン制御処理ルーチンを示すフローチャート(その1)
【図3】同、エンジン制御処理ルーチンを示すフローチャート(その2)
【図4】同、エンジン制御処理ルーチンを示すフローチャート(その3)
【図5】同、変速制御処理ルーチンを示すフローチャート(その1)
【図6】同、変速制御処理ルーチンを示すフローチャート(その2)
【図7】同、変速制御処理ルーチンを示すフローチャート(その3)
【図8】同、目標駆動力マップの説明図
【図9】同、変速マップの説明図
【図10】同、走行モード毎のアクセル開度とスロットル開度との関係を示す特性図
【図11】第2実施形態による図4に代えて適用するフローチャート
【発明を実施するための形態】
【0014】
以下、図面に基づいて本発明の一実施形態を説明する。
【0015】
[第1実施形態]
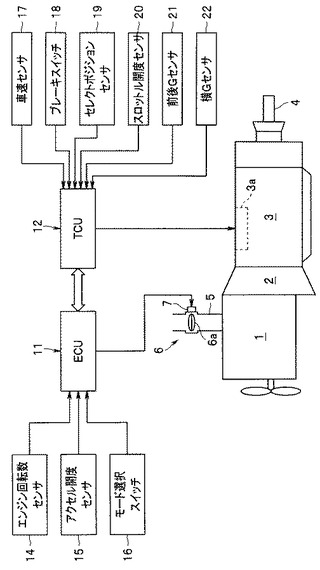
図1〜図10に本発明の第1実施形態を示す。図1の符号1はエンジンで、このエンジン1の出力側にトルクコンバータ2を介して自動変速機3が連設されている。エンジン1からの出力トルクは、トルクコンバータ2の流体を介し、或いはロックアップ締結状態のときはロックアップクラッチ(図示せず)を介して自動変速機3に伝達され、この自動変速機3で、多段変速機においては所定の変速段に、無段変速機においては所定の変速比に変速された後、出力軸4から後輪或いは前輪等の駆動輪側へ伝達されて駆動力が発生する。尚、以下においては、多段変速機を例に掲げて説明し、無段変速機の場合は、変速段を変速比と読み換えて適用する。
【0016】
エンジン1の吸気ポート(図示せず)に連通する吸気通路5の中途に電子制御スロットル装置(ETC)6が配設されている。このETC6はスロットル弁6aを開閉動作させるスロットルアクチュエータ7を有し、このスロットルアクチュエータ7が、後述するエンジン制御手段としてのエンジン制御ユニット(ECU)11からの駆動信号にて駆動される。
【0017】
又、自動変速機3には遊星歯車等で構成された変速機構が内装されていると共に、この変速機構を適宜駆動させるクラッチやブレーキ等から成る摩擦締結要素が内装されている。更に、この自動変速機3には、摩擦締結要素の締結或いは開放動作、及びトルクコンバータ2に設けられているロックアップクラッチの開放或いは接続動作を実行させるコントロールバルブユニット3aが設けられている。このコントロールバルブユニット3aは、後述する変速制御手段としての変速機制御ユニット(TCU)12からの変速指令(ダウンシフト指令、或いはアップシフト指令等)信号にて動作される。
【0018】
ECU11、及びTCU12は、CPU、ROM、RAM、及びEEPROMを代表とする不揮発性メモリ等を備えたマイクロコンピュータで構成されており、両装置11,12がバスラインを介して双方向通信自在に接続されている。尚、このECU11,TCU11は1つの走行制御ユニットに統合されていても良く、本発明では、このECU11とTCU12とを統合して走行制御手段と称している。
【0019】
ECU11の入力側には、エンジン1の出力軸の回転数等からエンジン回転数Ne[rpm]を検出するエンジン回転数センサ14、アクセルペダル(図示せず)の踏込み量であるアクセル開度AP[%]を検出するアクセル開度センサ15、及びモード選択手段としてのモード選択スイッチ16等、エンジン制御に必要なパラメータを検出するセンサ類が接続されている。又、このECU11の出力側に、ETC6のスロットルアクチュエータ7が接続されている。尚、運転者がモード選択スイッチ16を操作することで、後述する走行モード(Iモード、Sモード、S#モード)が選択される。
【0020】
一方、TCU12の入力側には、自動変速機3の出力軸4の回転速度等に基づいて車速Vspを検出する車速センサ17、ブレーキペダル(図示せず)の踏込みでON信号を出力するブレーキスイッチ18、セレクトレバーのセット位置を検出するセレクトポジションセンサ19、スロットル弁6aの開度(スロットル開度)SVを検出するスロットル開度センサ20、車両の前後加速度Gxを検出する前後加速度(前後G)センサ21、車両の横加速度Gyを検出する横加速度(横G)センサ22等、変速制御に必要なパラメータを検出するセンサ・スイッチ類が接続されている。更に、TCU12の出力側にコントロールバルブユニット3aに設けられている各アクチュエータが接続されている。
【0021】
本実施形態では、運転状態に応じて、ECU11で実行されるエンジン制御とTCU12で実行される変速制御とを協調制御する駆動力制御と、両者を独立に制御する駆動トルク制御とが実行される。
【0022】
すなわち、駆動力制御では、ECU11において車速Vspとアクセル開度APとに基づいて最大駆動力を得ることのできる目標駆動力Ftを設定し、この目標駆動力Ftと車速Vspとに基づいて目標出力Ptを設定する。そして、この目標出力Ptに対応するエンジン回転数(要求エンジン回転数)Neを求め、このエンジン回転数Neとアクセル開度APとに基づき目標トルクτeを設定し、目標トルクτeが出力されるようにスロットル弁6aの開度(スロットル開度)SVをフィードバック制御する。
【0023】
一方、駆動力制御時のTCU12では、目標出力Ptに対応する目標スロットル開度SVtを設定し、この目標スロットル開度SVtと車速Vspとに基づき目標変速段を設定し、現在の変速段を目標変速段に遷移させる。
【0024】
又、駆動トルク制御では、ECU11はアクセル開度APとエンジン回転数Neとに基づき目標トルクτeを設定し、目標トルクτeが出力されるようにスロットル開度SVをフィードバック制御する。又、TCU12は車速Vspとエンジン回転数Neとに基づき目標変速段を設定し、現在の変速段を目標変速段に遷移させる。
【0025】
その結果、駆動力制御では、ECU11によるエンジン制御とTCU12による変速制御とが協調されるため、変速時などのトルク段差が生じ難くなり、変速ショックが軽減される。一方、駆動トルク制御では、ECU11によるエンジン制御とTCU12による変速制御とが独立して制御されるため、アクセルペダル(図示せず)とスロットル弁6aとの関係が機械式リンクとほぼ同等の特性となり、又、変速制御は変速時のトルク段差によりダウンシフト、或いはアップシフトを体感することができる。
【0026】
上述したECU11,TCU12で実行される駆動力制御、及び駆動トルク制御は、具体的には、図2〜図7に示すフローチャートに従って実行される。エンジン制御は、図2〜図4に示すエンジン制御処理ルーチンに従って処理され、又、変速制御は、図5〜図7に示す変速制御処理ルーチンに従って処理される。
【0027】
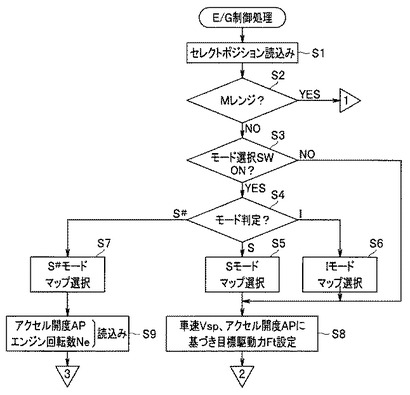
先ず、エンジン制御処理ルーチンでの処理について説明する。このルーチンは所定演算周期毎に実行され、ステップS1で、セレクトポジションセンサ19で検出したセレクトレバーのセレクトポジションを読込み、ステップS2で、セレクトレバーが、自動変速機の変速操作(アップシフト或いはダウンシフト)を手動で行うことのできるマニュアルレンジ(Mレンジ)にセットされているか否かを調べる。そして、Mレンジにセットされていると判定したきは、ステップS15へ分岐する。一方、Mレンジ以外の、ドライブ(D)レンジ等の走行レンジにセットされている、すなわち、運転者がA/T(自動変速)モードを選択していると判定したときは、ステップS3へ進む。
【0028】
ステップS3へ進むと、運転者がモード選択スイッチ16を操作したか否かが調べられ、操作していないときはステップS8へジャンプする。又、モード選択スイッチ16の操作を検出したときは、ステップS4へ進む。ステップS4へ進むと、運転者がモード選択スイッチ16を介して、何れの走行モードを選択したかが調べられる。
【0029】
本実施形態では、目標トルクが走行モード毎に設定されている。この走行モードは、ノーマルモード(Sモード)、エコノミーモード(Iモード)、スポーツモード(S#モード)の3モードを有しており、各走行モードS,I,S#は、異なるエンジン制御特性、及び変速制御特性を有している。尚、エンジン制御特性は、前述した特許文献2(特許第3930529号公報)に記載されている。
【0030】
エンジン制御では、選択した走行モードに対応する目標トルクマップに基づき、同一アクセル開度AP、同一エンジン回転数Neであっても、異なる目標トルクが設定される。同様に、変速制御では、選択した走行モードに対応する変速モードマップに基づき、同一車速Vsp、同一スロットル開度SVであっても、異なる変速段が設定される。
【0031】
ここで、各走行モードについて簡単に説明する。エンジン制御は、運転者の選択する走行モードに対応して選択されるモードマップを有している。すなわち、本実施形態では、Sモード用目標トルクマップ(以下「Sモードマップ」と称する)、Iモード用目標トルクマップ(以下「Iモードマップ」と称する)、S#モード用目標トルクマップ(以下「S#モードマップ」と称する)の3モードを有している。
【0032】
一方、変速制御は、S変速モードマップ(「S変速マップ」と称する)、I変速モードマップ(「I変速マップ」と称する)、S#変速モードマップ(「S#変速マップ」と称する)を有している。
【0033】
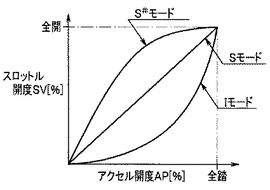
ここで、エンジン制御の際に参照される各目標トルクマップの特性について簡単に説明する。Sモードマップは、アクセル開度APに対して目標トルクがほぼ線形に変化させる特性を有し、快適な走行が実現できるように設定されている。Iモードマップは、上述したSモードマップに比し、常用領域の目標トルクの上昇を抑えて、低中速領域ではイージードライブ性と低燃費性との双方をバランス良く両立させることができるように設定されている。更に、S#モードマップは、アクセル操作量に対する駆動力の応答性が高くなるように、ほぼ全運転領域でアクセル開度APの変化に対する目標トルクの変化率を大きくして、エンジン1の有するポテンシャルを最大限に発揮できるように設定されている。尚、各走行モードS,I,S#におけるアクセル開度APとスロットル開度SVとのおおよその関係は図10に示す通りである。一方、各変速モードマップは、各目標トルクマップに対応した変速スケジュールが設定されている。
【0034】
そして、Sモードが選択されたと判定した場合はステップS5へ進み、Iモードが選択されたと判定した場合はステップS6へ進み、S#モードが選択されたと判定した場合はステップS7へ進む。ステップS5〜S7へ進むと、対応するモードマップ(S,I,S#)を、ECU11の不揮発性メモリから読込んで、今回のモードマップとして選択する。そして、Sモードマップ或いはIモードマップが選択された場合は、ステップS8へ進み、S#モードマップが選択された場合は、ステップS9へ進む。
【0035】
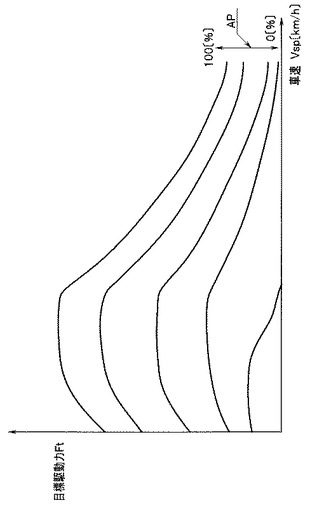
ステップS8へ進むと、車速Vspとアクセル開度APとに基づき、図8に例示する目標駆動力マップを参照して、最大駆動力を得ることのできる目標駆動力Ftを設定する。尚、この目標駆動力Ftは後述する変速制御処理ルーチンにおいても読込まれる。
【0036】
又、ステップS9へ進むと、アクセル開度センサ15で検出したアクセル開度APとエンジン回転数センサ14で検出したエンジン回転数Neとを読込み、ステップS12へジャンプする。
【0037】
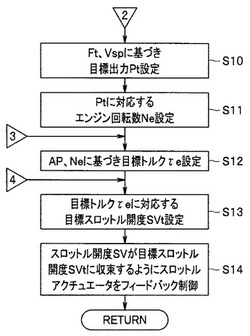
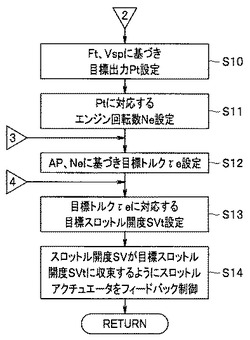
テップS8からステップS10へ進むと、目標駆動力Ftと車速Vspとに基づいてエンジン1が出力すべき目標出力Ptを求め、ステップS11へ進み、この目標出力Ptに対応する必要エンジン回転数をテーブル検索等により設定し、この必要エンジン回転数をエンジン回転数Neとして設定する。
【0038】
そして、ステップS9或いはステップS11からステップS12へ進むと、アクセル開度APとエンジン回転数Neとに基づき、ステップS5〜S7で選択したモードマップを参照して目標トルクτeを設定し、ステップS13へ進み、目標トルクτeに対応する目標スロットル開度SVtを設定する。
【0039】
次いで、ステップS14へ進み、スロットル開度センサ20で検出した実際のスロットル開度SVを読込み、このスロットル開度SVが目標スロットル開度SVtに収束するように、ETC6に設けられているスロットルアクチュエータを制御してスロットル弁6aの開度をフィードバック制御してルーチンを抜ける。
【0040】
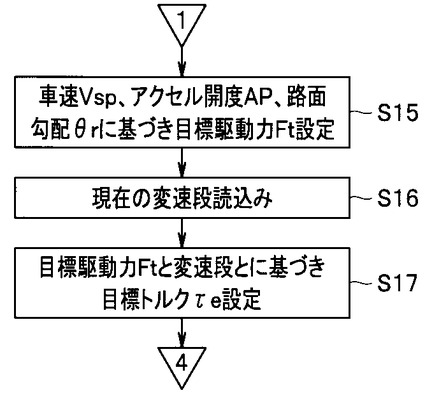
一方、上述したステップS2でマュアルシフトモード(Mモード)と判定されてステップS15へ分岐すると、車速センサ17で検出した車速Vspとアクセル開度センサ15で検出したアクセル開度APとに基づき、図8に例示する目標駆動力マップを参照して、最大駆動力を得ることのできる目標駆動力Ftを設定する。又、前後Gセンサ21からの信号(前後加速度Gx)に基づいて推定した路面勾配θrから勾配抵抗を求め、この勾配抵抗を目標駆動力Ftに加算して、この目標駆動力Ftを勾配補正する(Ft←Ft+路面抵抗)。
【0041】
次いで、ステップS16へ進み、マニュアル操作により選択した現在の変速段を読込み、ステップS17で、目標駆動力Ftと現在の変速段の変速比とから目標トルクτeを設定し(τe←Ft/変速比)、ステップS13へ戻る。
【0042】
その結果、ECU11で実行されるエンジン制御では、セレクトレバーがDレンジ等、Mレンジ以外の走行レンジにセットされている(A/Tモード)と共に、走行モードとしてSモード或いはIモードが選択されている場合は、先ず、目標駆動力Ftが設定され、この目標駆動力に基づいて必要エンジン回転数を設定し、この必要エンジン回転数を、目標トルクτeを設定する際のパラメータとなるエンジン回転数Neとするようにしたので、後述する変速制御との協調が図れ、変速時のトルク段差が生じ難くなり、変速ショックが軽減される。
【0043】
一方、走行モードとしてS#モードが選択された場合、目標トルクτeが、アクセル開度センサ15で検出したアクセル開度APとエンジン回転数センサ14で検出したエンジン回転数Neとに基づいて直接設定される駆動トルク制御となるため、エンジン制御が後述する変速制御とは独立した制御となり、アクセルペダルとスロットル弁6aとの関係が機械式リンクと同等の特性となり、良好なアクセルワークを楽しむことができる。
【0044】
又、セレクトレバーをMレンジにセットしたMモード時には、目標駆動力Ftを現在の変速段の変速比で除算して目標トルクτeを求めるようにしたので、変速制御と協調された駆動力制御となる。
【0045】
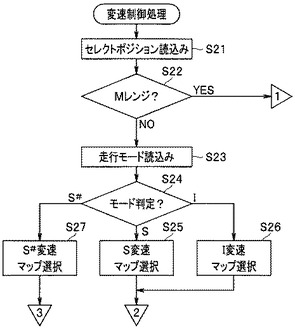
次に、図5〜図7に示す変速制御処理ルーチンで処理される変速制御について説明する。このルーチンは所定演算周期毎に実行され、先ず、ステップS21で、セレクトポジションセンサ19で検出したセレクトレバーのセレクトポジションを読込み、ステップS22で、セレクトレバーがMレンジにセットされているか否かを調べる。そして、Mレンジにセットされていると判定したときは、ステップS34へ分岐する。一方、Mレンジ以外の、ドライブ(D)レンジ等の走行レンジにセットされている場合は、A/Tモードであり自動変速制御すべく、ステップS23へ進む。
【0046】
ステップS23では、ECU11で判定した走行モードを読込み、ステップS24で、何れの走行モードが選択されているかを調べる。そして、Sモードが選択されていると判定した場合はステップS25へ進み、Iモードが選択されていると判定した場合はステップS26へ進み、S#モードが選択されていると判定した場合はステップS27へ進む。
【0047】
ステップS25〜S27へ進むと、対応する変速モードマップ(S,I,S#)を、TCU12の不揮発性メモリから読込んで、今回の変速マップとして選択する。そして、S変速マップ或いはI変速マップが選択された場合は、ステップS28へ進む。又、S#変速マップが選択された場合は、ステップS29へ進む。
【0048】
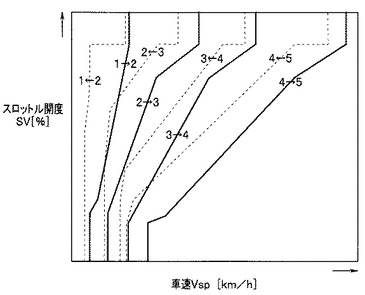
図9に変速マップを例示する。同図においては、アップシフト側の変速線が実線で示され、ダウンシフト側の変速線が破線で示されている。又、同図に示す変速マップでは、アップシフト側の変速線を、ダウンシフト側の変速線よりも高速側に配置することでヒステリシスを設け、これにより変速時の制御ハンチングを防止するようにしている。この変速マップは、エンジン1の出力特性に適合する変速スケジュールを、予め実験などから走行モードS,I,S#毎に求めて設定されている。
【0049】
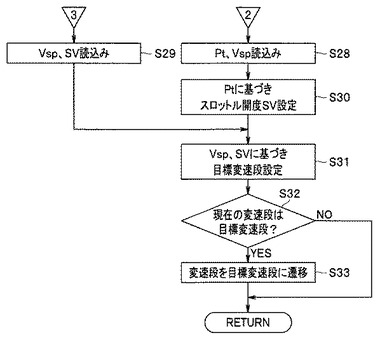
そして、ステップS25,S26からステップS28へ進むと、エンジン制御ルーチンのステップS10において設定した目標出力Ptと車速Vspとを読込み、ステップS30で、目標出力Ptに対応する目標スロットル開度SVtをテーブル検索等により設定し、この目標スロットル開度SVtをスロットル開度SVとして設定して、ステップS31へ進む。
【0050】
一方、ステップS27からステップS29へ進むと、車速センサ17で検出した車速Vspとスロットル開度センサ20で検出したスロットル開度SVとを読込み、ステップS31へジャンプする。
【0051】
ステップS29、或いはステップS30からステップS31へ進むと、車速Vspとスロットル開度SVとに基づき、走行モードに対応して選択した変速マップ(図9参照)を参照して目標変速段を設定する。
【0052】
その後、ステップS32へ進み、現在の変速段と目標変速段とを比較し、現在の変速段が目標変速段の場合は、そのままルーチンを抜ける。又、現在の変速段が目標変速段と相違する場合は、ステップS34へ進み、変速段を目標変速段に遷移させてルーチンを抜ける。
【0053】
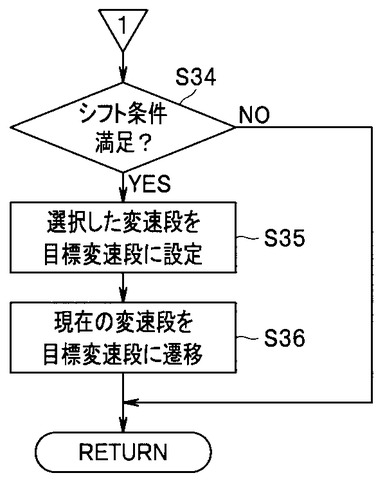
一方、ステップS22で、セレクトレバーがMレンジにセットされていると判定されてステップS34へ分岐すると、シフト条件が満足されているか否かを調べる。このシフト条件は、Mレンジにセットされているセレクトレバーを操作して変速段をアップシフト或いはダウンシフトさせる際のアップシフト方向或いはダウンシフト方向への変速が可能か否かを判定するものである。具体的には、車速とスロットル開度とをパラメータとして変速マップを参照し、アップシフト或いはダウンシフト後の変速段(CVTの場合は変速比)が変速可能範囲に収まっているか否かを調べることで判定する。
【0054】
そして、変速可能範囲に収まっていると判定した場合は、ステップS35へ進み、セレクトレバーの操作により選択した変速段を目標変速段として設定し、ステップS36で、現在の変速段を目標変速段に遷移させてルーチンを抜ける。
【0055】
このように、TCU12で実行される変速制御では、セレクトレバーがDレンジ等、Mレンジ以外の走行レンジにセットされている(A/Tモード)と共に、走行モードとしてSモード或いはIモードが選択されている場合は駆動力制御が実行されるため、ECU11で実行されるエンジン制御との協調により、変速時のトルク段差が生じ難くなり、変速ショックを軽減することができる。一方、変速モードがA/Tモードであり、走行モードとしてS#モードが選択されている場合は、駆動トルク制御となるため、スポーツ性に優れた変速制御を得ることができる。又、セレクトレバーをMレンジにセットしたMモードでは、上述したように、エンジン制御が変速制御とは独立した駆動トルク制御となるため、例えばアクセル開度APを一定にした状態でシフトダウン或いはシフトアップした際の駆動力の変化を、運転者に体感させることができるため、トルク段差の少ない制御が実行される駆動力制御に比し、運転者に与える違和感を軽減することができる。
【0056】
[第2実施形態]
図11に本発明の第2実視形態を示す。本実施形態は、上述した第1実施形態の図4に示すフローチャートに代えて適用するものである。
【0057】
上述した第1実施形態では、セレクトレバーをMレンジにセットしたMモードでは、エンジン制御として駆動力制御を実行して、変速制御との協調制御を行っているが、本実施形態によるエンジン制御は、Mモードでの通常走行においては駆動トルク制御を実行して、変速制御とは独立した制御とし、コーナリング走行時は駆動力制御に切替えるようにしたものである。
【0058】
すなわち、Mモードにおける通常走行において駆動力制御が実行されると、例えば、運転者がアクセル開度APを一定にした状態で変速段を変速操作(ダウンシフト或いはアップシフト)しても、駆動力の小さい小排気量車では、運転者の期待する程の駆動力差が体感できず、運転者に違和感を与えてしまう可能性がある。しかし、Mモード時のエンジン制御を、変速制御とは独立させて、一律に駆動トルク制御とした場合、特に、コーナリング走行ではアクセル操作に応じてトルクが変動するため、車両挙動が不安定になり易い。そのため、本実施形態では、Mモードでの走行において、通常走行は駆動トルク制御とし、コーナリング走行と判定した場合は、駆動力制御に切替えて、走行安定性を向上させると共に、運転者の意思に沿った走行を可能とし、違和感を軽減させるようにしている。
【0059】
すなわち、図2のステップS2でセレクトレバーがMレンジにセットされたMモードと判定されて、ステップS41へ分岐すると、コーナリング走行か否かを判定する。コーナリング走行か否かは、ブレーキスイッチ18、車速Vsp、アクセル開度AP、横Gセンサ22で検出した横加速度Gy等に基づいて判定する。すなわち、ブレーキスイッチ18がONで、且つ車両減速度(車速の時間微分値)が所定値以上の場合、コーナ進入と判定し、次いで、横加速度Gyが所定しきい値以上の場合はコーナリング中と判定し、その後、車両加速度(車両微分値)が所定しきい値以上の場合、コーナからの脱出状態と判定する。
【0060】
ステップS41で、コーナリング走行を判定する上述の各運転状態が検出されない場合は、通常走行と判定し、駆動トルク制御を実行すべくステップS42へ進み、車速Vspとエンジン回転数Ne、アクセル開度APに基づき、目標トルクτeを設定して、図3のステップS13へ戻る。
【0061】
一方、コーナリング走行と判定したときは、駆動力制御を実行すべく、ステップS15へ分岐し、このステップS15〜S17で、上述した第1実施形態の図4に示すフローチャートと同様のステップで目標トルクτeを設定して、図3のステップS13へ戻る。
【0062】
その結果、Mモードでの走行であっても、コーナリング走行では駆動力制御となるため、車両挙動が安定し、アクセル操作に対する駆動力応答ゲインがA/Tモードと同等となるため、車両挙動が安定し、運転者に与える違和感を軽減させることができる。
【0063】
尚、上述した図11に示すステップS15での処理において、目標駆動力Ftを設定するに際し、路面摩擦係数(路面μ)の推定値、ヨーモーメント或いはヨーレイト等に基づき、走行路面が低摩擦係数路面(低μ路)と判定され、或いはヨーモーメント或いはヨーレイト等が予め設定したしきい値を越えた場合、目標駆動力Ftを制限するようにして、車両挙動の安定化を図るようにしても良い。
【0064】
本発明は、以上説明した各実施形態に限定されることなく、種々の変形や変更が可能であり、それらも本発明の技術的範囲内である。又、上述した実施形態では、走行モードとして3種類のモードを有する走行制御装置について説明したが、これに限定されるものではなく、2種類又は4種類以上の走行モードを有するものに適用することもできる。更に、各実施形態では走行モードとしてSモード選択時には駆動力制御が実行されるが、Sモード選択時に駆動トルク制御が実行されるようにしてもよい。
【符号の説明】
【0065】
1…エンジン、
3…自動変速機、
10…アクセル開度、
11…ECU、
12…TCU、
15…アクセル開度センサ、
16…モード選択スイッチ、
19…セレクトポジションセンサ、
20…スロットル開度センサ、
τe…目標トルク、
AP…アクセル開度、
Ft…目標駆動力、
Ne…エンジン回転数、
SV…スロットル開度、
SVt…目標スロットル開度、
Vsp…車速
【技術分野】
【0001】
本発明は、走行状態に応じて、エンジン制御と変速制御とを連動する駆動力制御と、エンジン制御と変速制御とを独立に制御する駆動トルク制御とを切替える車両の走行制御装置に関する。
【背景技術】
【0002】
従来、無段変速機(CVT)や、遊星歯車機構等の多段変速機等を備える自動変速機では、セレクトレバーをD(ドライブ)レンジにセットすることで、変速比(変速段)が運転状態に応じて自動的に設定される自動変速モード以外に、セレクトレバーをM(マニュアルシフト)レンジにセットすることで運転者がマニュアルトランスミッション(MT)車のように、変速段を任意に選択することのできるマニュアルシフトモード(Mモード)を備えているものが知られている。
【0003】
又、最近では、エンジン制御と変速制御とを連動させる協調制御の技術も知られており、特許文献1(特開2002−192988号公報)等に開示されている。同文献では、エンジン制御と変速制御とを協調させるに際し、エンジン制御では、アクセル開度と車速とをパラメータとしてマップ参照により目標駆動力を設定し、この目標駆動力に勾配抵抗を加算して、最終目標駆動力を設定する。そして、この最終目標駆動力を自動変速機の現在の変速比で除算して目標エンジントルクを算出し、この目標エンジントルクとエンジン回転数とをパラメータとして目標スロットル開度を設定する。その後、電子制御スロットルのスロットル弁開度が目標スロットル開度になるように制御する。一方、変速制御では、最終目標駆動力と車速とをパラメータとしてマップ参照により変速制御用アクセル開度を設定し、この変速制御用アクセル開度と車速とをパラメータとして、変速マップを参照して目標変速段を設定し、現在の変速段を目標変速段に遷移させる。
【0004】
その結果、引用文献1に開示されている技術では、エンジン制御と変速制御とが協調されて、最終目標駆動力を達成する制御が実行される。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2002−192988号公報
【特許文献2】特許第3930529号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、1台の車両で少なくとも2つの異なる駆動力特性を有し、運転者が、その走行モードの中から1つのモードを選択することで、エンジン出力特性が切り替わると共に、それに対応して自動変速機の変速特性が変更されるエンジン制御技術が知られている。例えば特許文献2(特許第3930529号公報)には、異なる駆動力特性を有する3種類のモード(ノーマルモード、セーブモード(エコノミーモードとも言う)、パワーモード(スポーツモードとも言う))マップを有し、運転者が1つの走行モードを選択すると、対応するモードマップに従いエンジンが制御されると共に、選択した走行モードに対応する変速パターンで変速制御を行う技術が開示されている。
【0007】
このような、複数の走行モードで制御可能なエンジンを搭載する車両において、エンジン制御と変速制御とを、最終目標駆動力が得られるように協調して制御しようとした場合、この最終目標駆動力はエンジントルクと変速比との乗算値であるため、燃費性能等の性能制約により、目標駆動力を達成するために最適なエンジントルクと変速比の組み合わせが自ずと決まる。
【0008】
例えば、複数の走行モード間において、目標駆動力を車速とアクセル開度等で夫々別に設定した場合、車速とアクセル開度が異なる場合でも、目標駆動力が同じ値で有るならば、前記の通りに最適な組合せは不変である為、エンジントルクと変速比の関係は同じとなってしまう。又、各走行モード間で発生させる最大駆動力に差が無い場合は、アクセル開度が全開に近づく程、各走行モード間での発生駆動力の差が少なくなってしまう。
【0009】
特に、エンジン排気量が比較的小さく、最大駆動力の小さい車両では、エンジンの常用使用回転数領域が比較的高回転側に設定され易くなる上、最大駆動力が小さいが故に各走行モードでの駆動力特性に差別化を図る事が生じ難くなり、運転者に違和感を与えてしまう不都合がある。
【0010】
本発明は、上記事情に鑑み、走行モードとして複数のモードを有している場合であっても、各走行モードでの駆動力特性に差を設けて、運転者に与える違和感を軽減することのできる車両の走行制御装置を提供することを目的とする。
【課題を解決するための手段】
【0011】
本発明は、異なる駆動力特性を有する複数の走行モードの中から1つの走行モードを選択するモード選択手段と、前記モード選択手段で選択した1つの前記走行モードに対応するエンジンモードでエンジンを制御すると共に、選択した前記走行モードに対応する変速モードで自動変速機の変速を制御する走行制御手段とを有し、前記走行制御手段は、車両の運転状態に基づいて目標駆動力を設定し、該目標駆動力に基づいて前記エンジンの制御と前記自動変速機の変速制御とを協調制御する車両の走行制御装置において、前記走行制御手段は、前記走行モードとしてアクセル操作量に対する駆動力の応答性が高くなるように設定されているスポーツモードを有し、少なくとも前記走行モードとして該スポーツモードが選択された場合は前記エンジンの制御と前記自動変速機の変速制御とを、所定のパラメータに基づいて独立に制御する。
【発明の効果】
【0012】
本発明によれば、通常の走行モードはエンジン制御と変速制御とを駆動力制御で協調制御し、走行モードとしてスポーツモードが選択された場合、エンジン制御と変速制御とを独立に制御させるようにしたので、走行モードとして複数のモードを有している場合であっても、各走行モードでの駆動力特性に差を設けて、運転者に与える違和感を軽減することができる。
【図面の簡単な説明】
【0013】
【図1】第1実施形態によるエンジン及び自動変速機のシステム構成図
【図2】同、エンジン制御処理ルーチンを示すフローチャート(その1)
【図3】同、エンジン制御処理ルーチンを示すフローチャート(その2)
【図4】同、エンジン制御処理ルーチンを示すフローチャート(その3)
【図5】同、変速制御処理ルーチンを示すフローチャート(その1)
【図6】同、変速制御処理ルーチンを示すフローチャート(その2)
【図7】同、変速制御処理ルーチンを示すフローチャート(その3)
【図8】同、目標駆動力マップの説明図
【図9】同、変速マップの説明図
【図10】同、走行モード毎のアクセル開度とスロットル開度との関係を示す特性図
【図11】第2実施形態による図4に代えて適用するフローチャート
【発明を実施するための形態】
【0014】
以下、図面に基づいて本発明の一実施形態を説明する。
【0015】
[第1実施形態]
図1〜図10に本発明の第1実施形態を示す。図1の符号1はエンジンで、このエンジン1の出力側にトルクコンバータ2を介して自動変速機3が連設されている。エンジン1からの出力トルクは、トルクコンバータ2の流体を介し、或いはロックアップ締結状態のときはロックアップクラッチ(図示せず)を介して自動変速機3に伝達され、この自動変速機3で、多段変速機においては所定の変速段に、無段変速機においては所定の変速比に変速された後、出力軸4から後輪或いは前輪等の駆動輪側へ伝達されて駆動力が発生する。尚、以下においては、多段変速機を例に掲げて説明し、無段変速機の場合は、変速段を変速比と読み換えて適用する。
【0016】
エンジン1の吸気ポート(図示せず)に連通する吸気通路5の中途に電子制御スロットル装置(ETC)6が配設されている。このETC6はスロットル弁6aを開閉動作させるスロットルアクチュエータ7を有し、このスロットルアクチュエータ7が、後述するエンジン制御手段としてのエンジン制御ユニット(ECU)11からの駆動信号にて駆動される。
【0017】
又、自動変速機3には遊星歯車等で構成された変速機構が内装されていると共に、この変速機構を適宜駆動させるクラッチやブレーキ等から成る摩擦締結要素が内装されている。更に、この自動変速機3には、摩擦締結要素の締結或いは開放動作、及びトルクコンバータ2に設けられているロックアップクラッチの開放或いは接続動作を実行させるコントロールバルブユニット3aが設けられている。このコントロールバルブユニット3aは、後述する変速制御手段としての変速機制御ユニット(TCU)12からの変速指令(ダウンシフト指令、或いはアップシフト指令等)信号にて動作される。
【0018】
ECU11、及びTCU12は、CPU、ROM、RAM、及びEEPROMを代表とする不揮発性メモリ等を備えたマイクロコンピュータで構成されており、両装置11,12がバスラインを介して双方向通信自在に接続されている。尚、このECU11,TCU11は1つの走行制御ユニットに統合されていても良く、本発明では、このECU11とTCU12とを統合して走行制御手段と称している。
【0019】
ECU11の入力側には、エンジン1の出力軸の回転数等からエンジン回転数Ne[rpm]を検出するエンジン回転数センサ14、アクセルペダル(図示せず)の踏込み量であるアクセル開度AP[%]を検出するアクセル開度センサ15、及びモード選択手段としてのモード選択スイッチ16等、エンジン制御に必要なパラメータを検出するセンサ類が接続されている。又、このECU11の出力側に、ETC6のスロットルアクチュエータ7が接続されている。尚、運転者がモード選択スイッチ16を操作することで、後述する走行モード(Iモード、Sモード、S#モード)が選択される。
【0020】
一方、TCU12の入力側には、自動変速機3の出力軸4の回転速度等に基づいて車速Vspを検出する車速センサ17、ブレーキペダル(図示せず)の踏込みでON信号を出力するブレーキスイッチ18、セレクトレバーのセット位置を検出するセレクトポジションセンサ19、スロットル弁6aの開度(スロットル開度)SVを検出するスロットル開度センサ20、車両の前後加速度Gxを検出する前後加速度(前後G)センサ21、車両の横加速度Gyを検出する横加速度(横G)センサ22等、変速制御に必要なパラメータを検出するセンサ・スイッチ類が接続されている。更に、TCU12の出力側にコントロールバルブユニット3aに設けられている各アクチュエータが接続されている。
【0021】
本実施形態では、運転状態に応じて、ECU11で実行されるエンジン制御とTCU12で実行される変速制御とを協調制御する駆動力制御と、両者を独立に制御する駆動トルク制御とが実行される。
【0022】
すなわち、駆動力制御では、ECU11において車速Vspとアクセル開度APとに基づいて最大駆動力を得ることのできる目標駆動力Ftを設定し、この目標駆動力Ftと車速Vspとに基づいて目標出力Ptを設定する。そして、この目標出力Ptに対応するエンジン回転数(要求エンジン回転数)Neを求め、このエンジン回転数Neとアクセル開度APとに基づき目標トルクτeを設定し、目標トルクτeが出力されるようにスロットル弁6aの開度(スロットル開度)SVをフィードバック制御する。
【0023】
一方、駆動力制御時のTCU12では、目標出力Ptに対応する目標スロットル開度SVtを設定し、この目標スロットル開度SVtと車速Vspとに基づき目標変速段を設定し、現在の変速段を目標変速段に遷移させる。
【0024】
又、駆動トルク制御では、ECU11はアクセル開度APとエンジン回転数Neとに基づき目標トルクτeを設定し、目標トルクτeが出力されるようにスロットル開度SVをフィードバック制御する。又、TCU12は車速Vspとエンジン回転数Neとに基づき目標変速段を設定し、現在の変速段を目標変速段に遷移させる。
【0025】
その結果、駆動力制御では、ECU11によるエンジン制御とTCU12による変速制御とが協調されるため、変速時などのトルク段差が生じ難くなり、変速ショックが軽減される。一方、駆動トルク制御では、ECU11によるエンジン制御とTCU12による変速制御とが独立して制御されるため、アクセルペダル(図示せず)とスロットル弁6aとの関係が機械式リンクとほぼ同等の特性となり、又、変速制御は変速時のトルク段差によりダウンシフト、或いはアップシフトを体感することができる。
【0026】
上述したECU11,TCU12で実行される駆動力制御、及び駆動トルク制御は、具体的には、図2〜図7に示すフローチャートに従って実行される。エンジン制御は、図2〜図4に示すエンジン制御処理ルーチンに従って処理され、又、変速制御は、図5〜図7に示す変速制御処理ルーチンに従って処理される。
【0027】
先ず、エンジン制御処理ルーチンでの処理について説明する。このルーチンは所定演算周期毎に実行され、ステップS1で、セレクトポジションセンサ19で検出したセレクトレバーのセレクトポジションを読込み、ステップS2で、セレクトレバーが、自動変速機の変速操作(アップシフト或いはダウンシフト)を手動で行うことのできるマニュアルレンジ(Mレンジ)にセットされているか否かを調べる。そして、Mレンジにセットされていると判定したきは、ステップS15へ分岐する。一方、Mレンジ以外の、ドライブ(D)レンジ等の走行レンジにセットされている、すなわち、運転者がA/T(自動変速)モードを選択していると判定したときは、ステップS3へ進む。
【0028】
ステップS3へ進むと、運転者がモード選択スイッチ16を操作したか否かが調べられ、操作していないときはステップS8へジャンプする。又、モード選択スイッチ16の操作を検出したときは、ステップS4へ進む。ステップS4へ進むと、運転者がモード選択スイッチ16を介して、何れの走行モードを選択したかが調べられる。
【0029】
本実施形態では、目標トルクが走行モード毎に設定されている。この走行モードは、ノーマルモード(Sモード)、エコノミーモード(Iモード)、スポーツモード(S#モード)の3モードを有しており、各走行モードS,I,S#は、異なるエンジン制御特性、及び変速制御特性を有している。尚、エンジン制御特性は、前述した特許文献2(特許第3930529号公報)に記載されている。
【0030】
エンジン制御では、選択した走行モードに対応する目標トルクマップに基づき、同一アクセル開度AP、同一エンジン回転数Neであっても、異なる目標トルクが設定される。同様に、変速制御では、選択した走行モードに対応する変速モードマップに基づき、同一車速Vsp、同一スロットル開度SVであっても、異なる変速段が設定される。
【0031】
ここで、各走行モードについて簡単に説明する。エンジン制御は、運転者の選択する走行モードに対応して選択されるモードマップを有している。すなわち、本実施形態では、Sモード用目標トルクマップ(以下「Sモードマップ」と称する)、Iモード用目標トルクマップ(以下「Iモードマップ」と称する)、S#モード用目標トルクマップ(以下「S#モードマップ」と称する)の3モードを有している。
【0032】
一方、変速制御は、S変速モードマップ(「S変速マップ」と称する)、I変速モードマップ(「I変速マップ」と称する)、S#変速モードマップ(「S#変速マップ」と称する)を有している。
【0033】
ここで、エンジン制御の際に参照される各目標トルクマップの特性について簡単に説明する。Sモードマップは、アクセル開度APに対して目標トルクがほぼ線形に変化させる特性を有し、快適な走行が実現できるように設定されている。Iモードマップは、上述したSモードマップに比し、常用領域の目標トルクの上昇を抑えて、低中速領域ではイージードライブ性と低燃費性との双方をバランス良く両立させることができるように設定されている。更に、S#モードマップは、アクセル操作量に対する駆動力の応答性が高くなるように、ほぼ全運転領域でアクセル開度APの変化に対する目標トルクの変化率を大きくして、エンジン1の有するポテンシャルを最大限に発揮できるように設定されている。尚、各走行モードS,I,S#におけるアクセル開度APとスロットル開度SVとのおおよその関係は図10に示す通りである。一方、各変速モードマップは、各目標トルクマップに対応した変速スケジュールが設定されている。
【0034】
そして、Sモードが選択されたと判定した場合はステップS5へ進み、Iモードが選択されたと判定した場合はステップS6へ進み、S#モードが選択されたと判定した場合はステップS7へ進む。ステップS5〜S7へ進むと、対応するモードマップ(S,I,S#)を、ECU11の不揮発性メモリから読込んで、今回のモードマップとして選択する。そして、Sモードマップ或いはIモードマップが選択された場合は、ステップS8へ進み、S#モードマップが選択された場合は、ステップS9へ進む。
【0035】
ステップS8へ進むと、車速Vspとアクセル開度APとに基づき、図8に例示する目標駆動力マップを参照して、最大駆動力を得ることのできる目標駆動力Ftを設定する。尚、この目標駆動力Ftは後述する変速制御処理ルーチンにおいても読込まれる。
【0036】
又、ステップS9へ進むと、アクセル開度センサ15で検出したアクセル開度APとエンジン回転数センサ14で検出したエンジン回転数Neとを読込み、ステップS12へジャンプする。
【0037】
テップS8からステップS10へ進むと、目標駆動力Ftと車速Vspとに基づいてエンジン1が出力すべき目標出力Ptを求め、ステップS11へ進み、この目標出力Ptに対応する必要エンジン回転数をテーブル検索等により設定し、この必要エンジン回転数をエンジン回転数Neとして設定する。
【0038】
そして、ステップS9或いはステップS11からステップS12へ進むと、アクセル開度APとエンジン回転数Neとに基づき、ステップS5〜S7で選択したモードマップを参照して目標トルクτeを設定し、ステップS13へ進み、目標トルクτeに対応する目標スロットル開度SVtを設定する。
【0039】
次いで、ステップS14へ進み、スロットル開度センサ20で検出した実際のスロットル開度SVを読込み、このスロットル開度SVが目標スロットル開度SVtに収束するように、ETC6に設けられているスロットルアクチュエータを制御してスロットル弁6aの開度をフィードバック制御してルーチンを抜ける。
【0040】
一方、上述したステップS2でマュアルシフトモード(Mモード)と判定されてステップS15へ分岐すると、車速センサ17で検出した車速Vspとアクセル開度センサ15で検出したアクセル開度APとに基づき、図8に例示する目標駆動力マップを参照して、最大駆動力を得ることのできる目標駆動力Ftを設定する。又、前後Gセンサ21からの信号(前後加速度Gx)に基づいて推定した路面勾配θrから勾配抵抗を求め、この勾配抵抗を目標駆動力Ftに加算して、この目標駆動力Ftを勾配補正する(Ft←Ft+路面抵抗)。
【0041】
次いで、ステップS16へ進み、マニュアル操作により選択した現在の変速段を読込み、ステップS17で、目標駆動力Ftと現在の変速段の変速比とから目標トルクτeを設定し(τe←Ft/変速比)、ステップS13へ戻る。
【0042】
その結果、ECU11で実行されるエンジン制御では、セレクトレバーがDレンジ等、Mレンジ以外の走行レンジにセットされている(A/Tモード)と共に、走行モードとしてSモード或いはIモードが選択されている場合は、先ず、目標駆動力Ftが設定され、この目標駆動力に基づいて必要エンジン回転数を設定し、この必要エンジン回転数を、目標トルクτeを設定する際のパラメータとなるエンジン回転数Neとするようにしたので、後述する変速制御との協調が図れ、変速時のトルク段差が生じ難くなり、変速ショックが軽減される。
【0043】
一方、走行モードとしてS#モードが選択された場合、目標トルクτeが、アクセル開度センサ15で検出したアクセル開度APとエンジン回転数センサ14で検出したエンジン回転数Neとに基づいて直接設定される駆動トルク制御となるため、エンジン制御が後述する変速制御とは独立した制御となり、アクセルペダルとスロットル弁6aとの関係が機械式リンクと同等の特性となり、良好なアクセルワークを楽しむことができる。
【0044】
又、セレクトレバーをMレンジにセットしたMモード時には、目標駆動力Ftを現在の変速段の変速比で除算して目標トルクτeを求めるようにしたので、変速制御と協調された駆動力制御となる。
【0045】
次に、図5〜図7に示す変速制御処理ルーチンで処理される変速制御について説明する。このルーチンは所定演算周期毎に実行され、先ず、ステップS21で、セレクトポジションセンサ19で検出したセレクトレバーのセレクトポジションを読込み、ステップS22で、セレクトレバーがMレンジにセットされているか否かを調べる。そして、Mレンジにセットされていると判定したときは、ステップS34へ分岐する。一方、Mレンジ以外の、ドライブ(D)レンジ等の走行レンジにセットされている場合は、A/Tモードであり自動変速制御すべく、ステップS23へ進む。
【0046】
ステップS23では、ECU11で判定した走行モードを読込み、ステップS24で、何れの走行モードが選択されているかを調べる。そして、Sモードが選択されていると判定した場合はステップS25へ進み、Iモードが選択されていると判定した場合はステップS26へ進み、S#モードが選択されていると判定した場合はステップS27へ進む。
【0047】
ステップS25〜S27へ進むと、対応する変速モードマップ(S,I,S#)を、TCU12の不揮発性メモリから読込んで、今回の変速マップとして選択する。そして、S変速マップ或いはI変速マップが選択された場合は、ステップS28へ進む。又、S#変速マップが選択された場合は、ステップS29へ進む。
【0048】
図9に変速マップを例示する。同図においては、アップシフト側の変速線が実線で示され、ダウンシフト側の変速線が破線で示されている。又、同図に示す変速マップでは、アップシフト側の変速線を、ダウンシフト側の変速線よりも高速側に配置することでヒステリシスを設け、これにより変速時の制御ハンチングを防止するようにしている。この変速マップは、エンジン1の出力特性に適合する変速スケジュールを、予め実験などから走行モードS,I,S#毎に求めて設定されている。
【0049】
そして、ステップS25,S26からステップS28へ進むと、エンジン制御ルーチンのステップS10において設定した目標出力Ptと車速Vspとを読込み、ステップS30で、目標出力Ptに対応する目標スロットル開度SVtをテーブル検索等により設定し、この目標スロットル開度SVtをスロットル開度SVとして設定して、ステップS31へ進む。
【0050】
一方、ステップS27からステップS29へ進むと、車速センサ17で検出した車速Vspとスロットル開度センサ20で検出したスロットル開度SVとを読込み、ステップS31へジャンプする。
【0051】
ステップS29、或いはステップS30からステップS31へ進むと、車速Vspとスロットル開度SVとに基づき、走行モードに対応して選択した変速マップ(図9参照)を参照して目標変速段を設定する。
【0052】
その後、ステップS32へ進み、現在の変速段と目標変速段とを比較し、現在の変速段が目標変速段の場合は、そのままルーチンを抜ける。又、現在の変速段が目標変速段と相違する場合は、ステップS34へ進み、変速段を目標変速段に遷移させてルーチンを抜ける。
【0053】
一方、ステップS22で、セレクトレバーがMレンジにセットされていると判定されてステップS34へ分岐すると、シフト条件が満足されているか否かを調べる。このシフト条件は、Mレンジにセットされているセレクトレバーを操作して変速段をアップシフト或いはダウンシフトさせる際のアップシフト方向或いはダウンシフト方向への変速が可能か否かを判定するものである。具体的には、車速とスロットル開度とをパラメータとして変速マップを参照し、アップシフト或いはダウンシフト後の変速段(CVTの場合は変速比)が変速可能範囲に収まっているか否かを調べることで判定する。
【0054】
そして、変速可能範囲に収まっていると判定した場合は、ステップS35へ進み、セレクトレバーの操作により選択した変速段を目標変速段として設定し、ステップS36で、現在の変速段を目標変速段に遷移させてルーチンを抜ける。
【0055】
このように、TCU12で実行される変速制御では、セレクトレバーがDレンジ等、Mレンジ以外の走行レンジにセットされている(A/Tモード)と共に、走行モードとしてSモード或いはIモードが選択されている場合は駆動力制御が実行されるため、ECU11で実行されるエンジン制御との協調により、変速時のトルク段差が生じ難くなり、変速ショックを軽減することができる。一方、変速モードがA/Tモードであり、走行モードとしてS#モードが選択されている場合は、駆動トルク制御となるため、スポーツ性に優れた変速制御を得ることができる。又、セレクトレバーをMレンジにセットしたMモードでは、上述したように、エンジン制御が変速制御とは独立した駆動トルク制御となるため、例えばアクセル開度APを一定にした状態でシフトダウン或いはシフトアップした際の駆動力の変化を、運転者に体感させることができるため、トルク段差の少ない制御が実行される駆動力制御に比し、運転者に与える違和感を軽減することができる。
【0056】
[第2実施形態]
図11に本発明の第2実視形態を示す。本実施形態は、上述した第1実施形態の図4に示すフローチャートに代えて適用するものである。
【0057】
上述した第1実施形態では、セレクトレバーをMレンジにセットしたMモードでは、エンジン制御として駆動力制御を実行して、変速制御との協調制御を行っているが、本実施形態によるエンジン制御は、Mモードでの通常走行においては駆動トルク制御を実行して、変速制御とは独立した制御とし、コーナリング走行時は駆動力制御に切替えるようにしたものである。
【0058】
すなわち、Mモードにおける通常走行において駆動力制御が実行されると、例えば、運転者がアクセル開度APを一定にした状態で変速段を変速操作(ダウンシフト或いはアップシフト)しても、駆動力の小さい小排気量車では、運転者の期待する程の駆動力差が体感できず、運転者に違和感を与えてしまう可能性がある。しかし、Mモード時のエンジン制御を、変速制御とは独立させて、一律に駆動トルク制御とした場合、特に、コーナリング走行ではアクセル操作に応じてトルクが変動するため、車両挙動が不安定になり易い。そのため、本実施形態では、Mモードでの走行において、通常走行は駆動トルク制御とし、コーナリング走行と判定した場合は、駆動力制御に切替えて、走行安定性を向上させると共に、運転者の意思に沿った走行を可能とし、違和感を軽減させるようにしている。
【0059】
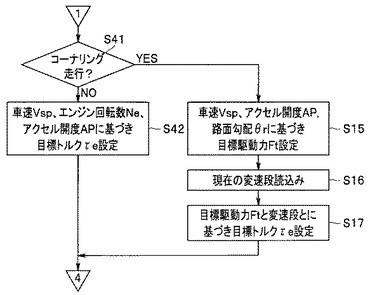
すなわち、図2のステップS2でセレクトレバーがMレンジにセットされたMモードと判定されて、ステップS41へ分岐すると、コーナリング走行か否かを判定する。コーナリング走行か否かは、ブレーキスイッチ18、車速Vsp、アクセル開度AP、横Gセンサ22で検出した横加速度Gy等に基づいて判定する。すなわち、ブレーキスイッチ18がONで、且つ車両減速度(車速の時間微分値)が所定値以上の場合、コーナ進入と判定し、次いで、横加速度Gyが所定しきい値以上の場合はコーナリング中と判定し、その後、車両加速度(車両微分値)が所定しきい値以上の場合、コーナからの脱出状態と判定する。
【0060】
ステップS41で、コーナリング走行を判定する上述の各運転状態が検出されない場合は、通常走行と判定し、駆動トルク制御を実行すべくステップS42へ進み、車速Vspとエンジン回転数Ne、アクセル開度APに基づき、目標トルクτeを設定して、図3のステップS13へ戻る。
【0061】
一方、コーナリング走行と判定したときは、駆動力制御を実行すべく、ステップS15へ分岐し、このステップS15〜S17で、上述した第1実施形態の図4に示すフローチャートと同様のステップで目標トルクτeを設定して、図3のステップS13へ戻る。
【0062】
その結果、Mモードでの走行であっても、コーナリング走行では駆動力制御となるため、車両挙動が安定し、アクセル操作に対する駆動力応答ゲインがA/Tモードと同等となるため、車両挙動が安定し、運転者に与える違和感を軽減させることができる。
【0063】
尚、上述した図11に示すステップS15での処理において、目標駆動力Ftを設定するに際し、路面摩擦係数(路面μ)の推定値、ヨーモーメント或いはヨーレイト等に基づき、走行路面が低摩擦係数路面(低μ路)と判定され、或いはヨーモーメント或いはヨーレイト等が予め設定したしきい値を越えた場合、目標駆動力Ftを制限するようにして、車両挙動の安定化を図るようにしても良い。
【0064】
本発明は、以上説明した各実施形態に限定されることなく、種々の変形や変更が可能であり、それらも本発明の技術的範囲内である。又、上述した実施形態では、走行モードとして3種類のモードを有する走行制御装置について説明したが、これに限定されるものではなく、2種類又は4種類以上の走行モードを有するものに適用することもできる。更に、各実施形態では走行モードとしてSモード選択時には駆動力制御が実行されるが、Sモード選択時に駆動トルク制御が実行されるようにしてもよい。
【符号の説明】
【0065】
1…エンジン、
3…自動変速機、
10…アクセル開度、
11…ECU、
12…TCU、
15…アクセル開度センサ、
16…モード選択スイッチ、
19…セレクトポジションセンサ、
20…スロットル開度センサ、
τe…目標トルク、
AP…アクセル開度、
Ft…目標駆動力、
Ne…エンジン回転数、
SV…スロットル開度、
SVt…目標スロットル開度、
Vsp…車速
【特許請求の範囲】
【請求項1】
異なる駆動力特性を有する複数の走行モードの中から1つの走行モードを選択するモード選択手段と、
前記モード選択手段で選択した1つの前記走行モードに対応するエンジンモードでエンジンを制御すると共に、選択した前記走行モードに対応する変速モードで自動変速機の変速を制御する走行制御手段とを有し、
前記走行制御手段は、車両の運転状態に基づいて目標駆動力を設定し、該目標駆動力に基づいて前記エンジンの制御と前記自動変速機の変速制御とを協調制御する車両の走行制御装置において、
前記走行制御手段は、前記走行モードとしてアクセル操作量に対する駆動力の応答性が高くなるように設定されているスポーツモードを有し、少なくとも前記走行モードとして該スポーツモードが選択された場合は前記エンジンの制御と前記自動変速機の変速制御とを、所定のパラメータに基づいて独立に制御することを特徴とする車両の走行制御装置。
【請求項2】
前記所定のパラメータは目標トルクであることを特徴とする請求項1記載の車両の走行制御装置。
【請求項3】
前記走行制御手段は、変速モードとして前記自動変速機の変速操作を手動で行うことのできるマニュアルシフトモードを有し、該変速モードとしてマニュアルシフトモードが選択されている場合、前記目標駆動力を手動で選択した変速段毎に設定する
ことを特徴とする請求項1又は2記載の車両の走行制御装置。
【請求項4】
前記走行制御手段は、変速モードとして前記自動変速機の変速操作を手動で行うことのできるマニュアルシフトモードを有し、該変速モードとしてマニュアルシフトモードが選択されている場合、前記エンジンの制御を、エンジン運転状態に基づいて設定したパラメータに基づき、前記走行モードに対応するエンジンモード毎に目標トルクを設定し、該目標トルクに基づいて行うことを特徴とする請求項1〜3の何れか1項に記載の車両の走行制御装置。
【請求項5】
前記走行制御手段は、前記変速モードとしてマニュアルシフトモードが選択されている場合であって、コーナリング走行と判定された場合は、前記エンジンの制御及び前記自動変速機の変速制御を前記目標駆動力に基づいて行うことを特徴とする請求項4記載の車両の走行制御装置。
【請求項6】
前記コーナリング走行と判定された場合であって、走行路面が低摩擦係数路面と判定された場合は、前記目標駆動力を制限することを特徴とする請求項5記載の車両の走行制御装置。
【請求項1】
異なる駆動力特性を有する複数の走行モードの中から1つの走行モードを選択するモード選択手段と、
前記モード選択手段で選択した1つの前記走行モードに対応するエンジンモードでエンジンを制御すると共に、選択した前記走行モードに対応する変速モードで自動変速機の変速を制御する走行制御手段とを有し、
前記走行制御手段は、車両の運転状態に基づいて目標駆動力を設定し、該目標駆動力に基づいて前記エンジンの制御と前記自動変速機の変速制御とを協調制御する車両の走行制御装置において、
前記走行制御手段は、前記走行モードとしてアクセル操作量に対する駆動力の応答性が高くなるように設定されているスポーツモードを有し、少なくとも前記走行モードとして該スポーツモードが選択された場合は前記エンジンの制御と前記自動変速機の変速制御とを、所定のパラメータに基づいて独立に制御することを特徴とする車両の走行制御装置。
【請求項2】
前記所定のパラメータは目標トルクであることを特徴とする請求項1記載の車両の走行制御装置。
【請求項3】
前記走行制御手段は、変速モードとして前記自動変速機の変速操作を手動で行うことのできるマニュアルシフトモードを有し、該変速モードとしてマニュアルシフトモードが選択されている場合、前記目標駆動力を手動で選択した変速段毎に設定する
ことを特徴とする請求項1又は2記載の車両の走行制御装置。
【請求項4】
前記走行制御手段は、変速モードとして前記自動変速機の変速操作を手動で行うことのできるマニュアルシフトモードを有し、該変速モードとしてマニュアルシフトモードが選択されている場合、前記エンジンの制御を、エンジン運転状態に基づいて設定したパラメータに基づき、前記走行モードに対応するエンジンモード毎に目標トルクを設定し、該目標トルクに基づいて行うことを特徴とする請求項1〜3の何れか1項に記載の車両の走行制御装置。
【請求項5】
前記走行制御手段は、前記変速モードとしてマニュアルシフトモードが選択されている場合であって、コーナリング走行と判定された場合は、前記エンジンの制御及び前記自動変速機の変速制御を前記目標駆動力に基づいて行うことを特徴とする請求項4記載の車両の走行制御装置。
【請求項6】
前記コーナリング走行と判定された場合であって、走行路面が低摩擦係数路面と判定された場合は、前記目標駆動力を制限することを特徴とする請求項5記載の車両の走行制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2012−131426(P2012−131426A)
【公開日】平成24年7月12日(2012.7.12)
【国際特許分類】
【出願番号】特願2010−286587(P2010−286587)
【出願日】平成22年12月22日(2010.12.22)
【出願人】(000005348)富士重工業株式会社 (3,010)
【Fターム(参考)】
【公開日】平成24年7月12日(2012.7.12)
【国際特許分類】
【出願日】平成22年12月22日(2010.12.22)
【出願人】(000005348)富士重工業株式会社 (3,010)
【Fターム(参考)】
[ Back to top ]