
車両の走行車線認識装置
【課題】 車両が走行している車線を正確に特定可能にする。
【解決手段】 本発明の車両の走行車線認識装置1は、複数の車線を備えた道路を車両が走行しているときに、走行している車線を特定するものであって、車両の走行状況を検出する検出手段を備えると共に、車両の周囲の状態を認識する認識手段を備え、更に、検出手段により検出した走行状況及び認識手段により認識した周囲状態に基づき車両が走行する車線を特定する特定手段2を備えるように構成したものである。
【解決手段】 本発明の車両の走行車線認識装置1は、複数の車線を備えた道路を車両が走行しているときに、走行している車線を特定するものであって、車両の走行状況を検出する検出手段を備えると共に、車両の周囲の状態を認識する認識手段を備え、更に、検出手段により検出した走行状況及び認識手段により認識した周囲状態に基づき車両が走行する車線を特定する特定手段2を備えるように構成したものである。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、複数の車線を備えた道路を車両が走行しているときに、走行している車線を特定する機能を備えた車両の走行車線認識装置に関する。
【背景技術】
【0002】
カーナビゲーション装置においては、GPS受信機等からなる位置検出器により検出した位置と、地図データとをマップマッチングすることにより、車両が走行中の道路と、この道路上の現在位置とを特定し、表示装置に地図(道路地図)と現在位置を表示するように構成されている。ここで、複数の車線を片側に備えた道路があるが、位置検出器の検出精度及び地図データの精度から、複数車線の中のどの車線を車両が走行しているのかは、わからなかった。このため、従来のカーナビゲーション装置では、運転者に走行する車線を変更するように促す案内、即ち、詳細な案内を実現することができなかった。
【0003】
尚、車両の走行車線を予測する装置の一例として、特許文献1に記載された構成が知られている。この構成においては、車両の前部の両側面部に距離センサを設け、これら2つの距離センサにより車両の両側の障害物(ガードレール等)との距離を検出し、これら検出した距離に基づいて、走行中の車線を推測するように構成されている。
【特許文献1】特開2003−168591号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
上記特許文献1の構成の場合、車線の幅が予め限られていることから、車線の幅が異なる道路においては、車線を正確に予測することができない。また、対向車線との境界に障害物がない道路の場合や、車両と並走する車両が存在するような場合には、車線を誤検出してしまうという問題点があった。
そこで、本発明の目的は、車両が走行している車線を正確に特定することができる車両の走行車線認識装置を提供するにある。
【課題を解決するための手段】
【0005】
本発明の車両の走行車線認識装置は、複数の車線を備えた道路を車両が走行しているときに、走行している車線を特定するものであって、前記車両の走行状況を検出する検出手段と、前記車両の周囲の状態を認識する認識手段と、前記検出手段により検出した走行状況及び前記認識手段により認識した周囲状態に基づき前記車両が走行する車線を特定する特定手段とを備えるところに特徴を有する。この構成においては、検出手段により検出した走行状況及び認識手段により認識した周囲状態に基づき車両が走行する車線を特定する構成であるので、従来構成に比べて、車線の特定精度をかなり高くすることができる。
【0006】
また、上記構成の場合、前記検出手段を、前記車両の進入車線を予測する車線予測手段と、前記車両の車線変更を検出する車線変更検出手段とから構成することが好ましい。更に、前記認識手段を、前記車両の両側の車線状態を認識する車線状態認識手段と、前記車両の両側の対象物の運動状態を認識する対象物運動状態認識手段とから構成することがより一層好ましい。
【発明を実施するための最良の形態】
【0007】
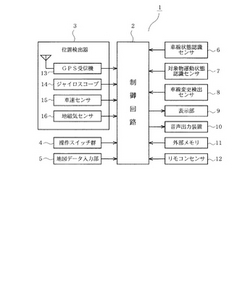
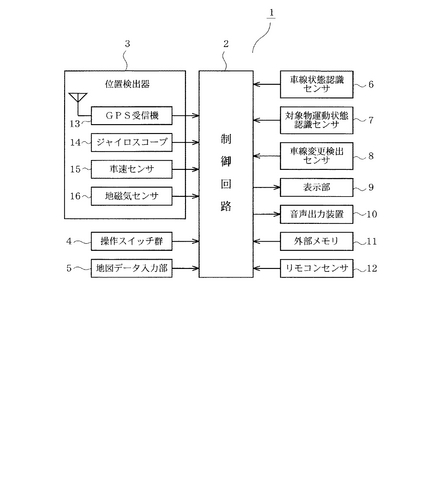
以下、本発明をカーナビゲーション装置に適用した一実施例について、図面を参照しながら説明する。まず、図1は、本実施例のカーナビゲーション装置1の電気的構成を概略的に示すブロック図である。この図1に示すように、カーナビゲーション装置1は、制御回路2と、位置検出器3と、操作スイッチ群4と、地図データ入力部5と、車線状態認識センサ(車線状態認識手段)6と、対象物運動状態認識センサ(対象物運動状態認識手段)7と、車線変更検出センサ(車線変更検出手段)8と、表示部9と、音声出力装置10と、外部メモリ11と、リモコンセンサ12とから構成されている。
【0008】
上記制御回路2は、カーナビゲーション装置1の動作全般を制御する機能を有しており、CPU、ROM、RAM、I/O及びこれらを接続するバス(いずれも図示しない)を備えて構成されている。位置検出器3は、GPS(Global Positioning System )受信機13と、ジャイロスコープ14と、車速センサ15と、地磁気センサ16とから構成されている。位置検出器3は、上記4つのセンサ13〜16により互いに補間しながら車両の現在位置を検出するように構成されており、高精度の位置検出機能を有している。
【0009】
尚、位置検出精度をそれほど必要としない場合には、4つのセンサ13〜16のうちの何れかで(または複数のセンサの組み合わせで)位置検出器3を構成しても良い。また、車両のステアリングの回転センサや、ホイールの車輪センサ等を適宜組み合わせて位置検出器3を構成しても良い。
操作スイッチ群4は、表示部9の表示画面の上面に設けられたタッチスイッチ(タッチパネル)と、表示部9の周辺部に設けられたメカニカルなプッシュスイッチ(図示しない)等とから構成されている。
【0010】
地図データ入力部5は、CD−ROM、DVD−ROM、HDD、メモリ等を読み取り可能な読取装置で構成されており、地図データ等を入力するための装置である。
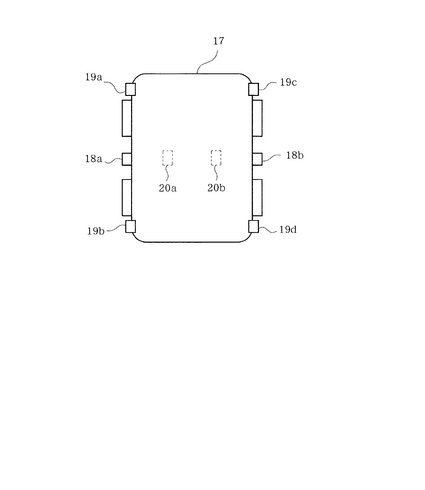
車線状態認識センサ6は、図2に示すように、自動車(車両)17の両側面部のほぼ中央部に配設された例えばCCDカメラからなる白線検出センサ18a、18bから構成されている。この場合、白線検出センサ18a、18bにより検出された画像データを画像認識処理することにより、自動車17の両側の道路の表面に描かれた車線状態が「直線」、「破線」、「線なし」のいずれであるかを認識することが可能な構成となっている。
【0011】
そして、制御回路2は、上記車線状態認識センサ6により認識された車線状態に基づいて自動車17が走行している車線を予測するように構成されている。例えば、自動車17の左側に「直線」が検出され、右側に「破線」が検出された場合には、自動車17は、現在、左車線を走行していると予測することができる。
対象物運動状態認識センサ7は、図2に示すように、自動車17の両側面部の前後部に配設された4個の赤外線センサ19a、19b、19c、19dから構成されている。各赤外線センサ19a、19b、19c、19dは、赤外線を投光し、物体(対象物)で反射した反射光(赤外線)を受光したとき、物体を検出し、反射光を受光しないとき、物体を検出しない構成となっている。
【0012】
そして、上記4個の赤外線センサ19a、19b、19c、19dの検出信号に基づいて、自動車17の周囲(左右両側)の対象物が自動車17と同じ方向に走行しているか否か、また、静止しているか否かを認識し、これら認識結果から自動車17の走行車線を予測することが可能なように構成されている。
具体的には、まず、片側の前後の赤外線センサ19a、19b(19c、19d)の検出順序(反応順序)により、自分の自動車17から見た片側の対象物の移動方向を求める。次に、赤外線センサ19a、19b(19c、19d)からの検出信号に基づいて、自分の自動車17に対する対象物の移動速度(相対速度)を測定する。この測定結果と、自分の自動車17の移動速度とから、対象物が静止している物体であるか、同じ進行方向に走行している自動車であるか、反対の進行方向に(即ち、対向車線を)走行している自動車であるかを認識するように構成されている。
【0013】
そして、上記認識結果に基づいて、自分の自動車17が走行している道路の車線を、例えば次の表に示すようにして、予測することが可能である。尚、自分の自動車17の移動速度を例えば50kmとする。
【0014】
【表1】

また、車線変更検出センサ8は、図2に示すように、自動車17の下面の中央部において左右に離して配設された例えばCCDカメラからなる2個の白線検出センサ20a、20bから構成されている。各白線検出センサ20a、20bは、検出した画像データを画像認識処理することにより、各センサ20a、20bの下方の道路の表面上に「直線」や「破線」等が描かれているか否かを検出することが可能になっている。
【0015】
この構成の場合、自動車17が車線変更を実行すると、上記2個の白線検出センサ20a、20bが順次白線を検出する。このとき、右の白線検出センサ20aが先に白線を検出し、左の白線検出センサ20bが後になるように検出した場合、自動車17は右車線に移動(車線変更)したと判断することができる。そして、反対に、左の白線検出センサ20bが先に白線を検出し、右の白線検出センサ20aが後になるように検出した場合、自動車17は左車線に移動(車線変更)したと判断することができる。
【0016】
また、表示部9は、地図を表示するための例えばカラー液晶ディスプレイで構成されており、地図データ(道路データ、文字データ及び背景データ等)、自車位置マーク、誘導経路等の付加データ等を重ねて表示することが可能なように構成されている。音声出力装置10は、音声案内の各種のメッセージや操作音等を出力する機能を有している。また、外部メモリ11は、メモリスティックやメモリカードや磁気テープ等の読取装置で構成されており、地図データや音楽データや映像データ等を入力するための装置である。
【0017】
尚、ユーザーは、図字しないリモコンを操作することにより、リモコンセンサ12を介して制御回路2へ各種の操作信号を与えるように構成されている。また、制御回路2は、図示しない通信装置(例えばVICS通信装置や、携帯電話機(専用の携帯電話端末や汎用の携帯電話機等)など)を介して外部の情報供給センタ(例えばVICSセンタや種々の情報センタ等)との間でデータを送受信することができるように構成されている。
【0018】
また、制御回路2は、現在位置(出発地)から目的地までの最適経路(誘導経路)を自動的に計算して設定する機能(経路計算機能)を備えている。尚、自動的に最適経路を設定する方法としては、例えばダイクストラ法等を使用している。また、目的地は、ユーザーが操作スイッチ群4やリモコンを操作して設定することが可能な構成となっている。そして、制御回路2は、表示部7に表示されている地図上に上記目的地までの最適経路(誘導経路)を重ねて表示する機能や、現在位置を上記地図上に位置付けるマップマッチング処理を実行する機能等を備えている。
【0019】
更にまた、制御回路2は、ジャイロスコープ14及び車速センサ15からの各検出信号と、地図データとに基づいて、自動車17が進入する車線を予測することができるように構成されている。例えば、一般の道路(片側に複数車線がある道路)の交差点において、自動車17が右折または左折する場合、どの車線に入っていくのか判定が困難である。このような場合に、制御回路2は、交差点の大きさのデータ(地図データ)と、自動車17が右折(左折)する際の右折(左折)角度(ジャイロスコープ14による検出値)と、自動車17の走行速度(車速センサ15による検出値)とに基づいて、どの車線に入ったかを予測するようにしている。
【0020】
具体的には、自動車17が右折(左折)時に90度回転するのに、10秒かかったとすると共に、そのときの走行速度が10kmであったとする。すると、右折(左折)時に、
(10/3600)*10km
進んだことになる。ここで、地図データから、交差点の大きさを把握し、計算された走行距離で入ると考えられる車線を、進入車線であると予測するのである。この場合、制御回路2が、車線予測手段としての機能を備えている。尚、ジャイロスコープ14に代えて、自動車17の右折(左折)角度を取得可能なセンサ(例えばステアリングの回転センサやジャイロセンサ等)を用いるように構成しても良い。
【0021】
そして、本実施例の場合、上記制御回路(車線予測手段)2と、前記車線変更検出センサ(車線変更検出手段)8から、自動車(車両)17の走行状況(走行状態)を検出する検出手段が構成されている。また、前記車線状態認識センサ(車線状態認識手段)6と、前記対象物運動状態認識センサ(対象物運動状態認識手段)7とから、自動車(車両)17の周囲の状態を認識する認識手段が構成されている。
【0022】
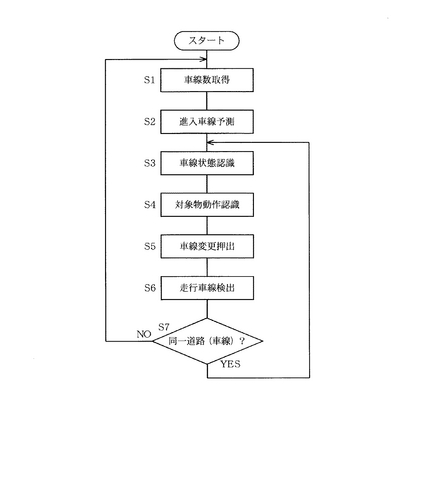
次に、上記構成のカーナビゲーション装置1の作用、特には、走行している車線を認識する制御の動作について、図3のフローチャートも参照して説明する。
まず、図3のステップS1において、制御回路2は、地図データから現在走行している道路の車線数の情報を取得する。続いて、ステップS2へ進み、制御回路2は、ジャイロスコープ14及び車速センサ15からの各検出信号と、地図データからの情報とに基づいて、自動車17が進入する車線を予測する。この場合、予測した車線の認識レベルを示すカウンタをインクリメントしておく。
【0023】
次に、ステップS3へ進み、制御回路2は、車線状態認識センサ6(白線検出センサ18a、18b)により、自動車17の両側の車線状態が「直線」、「破線」、「線なし」のいずれであるかを認識する。更に、制御回路2は、上記認識した車線状態に基づいて自動車17が走行している車線を予測すると共に、予測した車線の認識レベルを示すカウンタをインクリメントする。
【0024】
そして、ステップS4へ進み、制御回路2は、対象物運動状態認識センサ7(赤外線センサ19a、19b、19c、19d)により、自動車17の周囲(左右両側)の対象物が自動車17と同じ方向に走行しているか否か、また、静止しているか否かを認識し、これら認識結果から自動車17の走行車線を予測する。また、予測した車線の認識レベルを示すカウンタをインクリメントしておく。
【0025】
続いて、ステップS5へ進み、制御回路2は、車線変更検出センサ8(白線検出センサ20a、20b)により、自動車17が左車線または右車線に車線変更したことを検出したら、車線変更後の車線の認識レベルを示すカウンタをインクリメントしておく。
次に、ステップS6へ進み、制御回路2は、上記した4つのステップS2、S3、S4,S5で予測された車線の中から、認識レベルを示すカウンタの値が最も大きい車線を選び、この車線を自動車17が走行している車線として特定(検出)するように構成されている。この場合、制御回路2が、本発明の特定手段としての機能を有している。そして、ステップS7へ進み、同一の道路(または車線)を走行しているかどうかを判断し、同一の道路(または車線)を走行しているときは、「YES」へ進み、ステップS3へ戻り、前述した認識処理を設定時間間隔で繰り返し実行するように構成されている。
【0026】
また、自動車17が左折、右折、車線変更等を行った場合には、ステップS7において、同一の道路(または車線)を走行しなくなるから、「NO」へ進み、ステップS1へ戻る。そして、地図データから道路の車線数のデータを取得する処理(ステップS1)と、進入車線予測処理(ステップS2)とから前述した処理を繰り返し実行するように構成されている。
【0027】
このような構成の本実施例によれば、自動車17の進入車線を予測すると共に、自動車17の両側の車線状態を認識し、また、自動車17の両側の対象物の運動状態を認識し、更に、自動車17の車線変更を検出するようにし、これら認識結果や検出結果に基づいて自動車17が走行する車線を特定するように構成したので、従来構成に比べて、車線の特定精度(認識精度)を高くすることができる。
【0028】
尚、上記実施例においては、自動車17の進入車線を予測する機能と、自動車17の車線変更を検出する機能と、自動車17の両側の車線状態を認識する機能と、自動車17の両側の対象物の運動状態を認識する機能とを全て用いるように構成したが、これに限られるものではなく、上記4つの機能のうちのいくつかを適宜組み合わせて用いたり、他のセンサにより検出したセンサ情報を加えて用いたりするように構成することが可能である。
【図面の簡単な説明】
【0029】
【図1】本発明の一実施例を示すカーナビゲーション装置のブロック図
【図2】各種のセンサの配設位置を示す図
【図3】フローチャート
【符号の説明】
【0030】
図面中、1はカーナビゲーション装置(走行車線認識装置)、2は制御回路(車線予測手段、特定手段)、3は位置検出器、5は地図データ入力部、6は車線状態認識センサ(車線状態認識手段)、7は対象物運動状態認識センサ(対象物運動状態認識手段)、8は車線変更検出センサ(車線変更検出手段)、9は表示部、14はジャイロスコープ、15は車速センサ、17は自動車(車両)、18a、18bは白線検出センサ、19a、19b、19c、19dは赤外線センサ、20a、20bは白線検出センサを示す。
【技術分野】
【0001】
本発明は、複数の車線を備えた道路を車両が走行しているときに、走行している車線を特定する機能を備えた車両の走行車線認識装置に関する。
【背景技術】
【0002】
カーナビゲーション装置においては、GPS受信機等からなる位置検出器により検出した位置と、地図データとをマップマッチングすることにより、車両が走行中の道路と、この道路上の現在位置とを特定し、表示装置に地図(道路地図)と現在位置を表示するように構成されている。ここで、複数の車線を片側に備えた道路があるが、位置検出器の検出精度及び地図データの精度から、複数車線の中のどの車線を車両が走行しているのかは、わからなかった。このため、従来のカーナビゲーション装置では、運転者に走行する車線を変更するように促す案内、即ち、詳細な案内を実現することができなかった。
【0003】
尚、車両の走行車線を予測する装置の一例として、特許文献1に記載された構成が知られている。この構成においては、車両の前部の両側面部に距離センサを設け、これら2つの距離センサにより車両の両側の障害物(ガードレール等)との距離を検出し、これら検出した距離に基づいて、走行中の車線を推測するように構成されている。
【特許文献1】特開2003−168591号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
上記特許文献1の構成の場合、車線の幅が予め限られていることから、車線の幅が異なる道路においては、車線を正確に予測することができない。また、対向車線との境界に障害物がない道路の場合や、車両と並走する車両が存在するような場合には、車線を誤検出してしまうという問題点があった。
そこで、本発明の目的は、車両が走行している車線を正確に特定することができる車両の走行車線認識装置を提供するにある。
【課題を解決するための手段】
【0005】
本発明の車両の走行車線認識装置は、複数の車線を備えた道路を車両が走行しているときに、走行している車線を特定するものであって、前記車両の走行状況を検出する検出手段と、前記車両の周囲の状態を認識する認識手段と、前記検出手段により検出した走行状況及び前記認識手段により認識した周囲状態に基づき前記車両が走行する車線を特定する特定手段とを備えるところに特徴を有する。この構成においては、検出手段により検出した走行状況及び認識手段により認識した周囲状態に基づき車両が走行する車線を特定する構成であるので、従来構成に比べて、車線の特定精度をかなり高くすることができる。
【0006】
また、上記構成の場合、前記検出手段を、前記車両の進入車線を予測する車線予測手段と、前記車両の車線変更を検出する車線変更検出手段とから構成することが好ましい。更に、前記認識手段を、前記車両の両側の車線状態を認識する車線状態認識手段と、前記車両の両側の対象物の運動状態を認識する対象物運動状態認識手段とから構成することがより一層好ましい。
【発明を実施するための最良の形態】
【0007】
以下、本発明をカーナビゲーション装置に適用した一実施例について、図面を参照しながら説明する。まず、図1は、本実施例のカーナビゲーション装置1の電気的構成を概略的に示すブロック図である。この図1に示すように、カーナビゲーション装置1は、制御回路2と、位置検出器3と、操作スイッチ群4と、地図データ入力部5と、車線状態認識センサ(車線状態認識手段)6と、対象物運動状態認識センサ(対象物運動状態認識手段)7と、車線変更検出センサ(車線変更検出手段)8と、表示部9と、音声出力装置10と、外部メモリ11と、リモコンセンサ12とから構成されている。
【0008】
上記制御回路2は、カーナビゲーション装置1の動作全般を制御する機能を有しており、CPU、ROM、RAM、I/O及びこれらを接続するバス(いずれも図示しない)を備えて構成されている。位置検出器3は、GPS(Global Positioning System )受信機13と、ジャイロスコープ14と、車速センサ15と、地磁気センサ16とから構成されている。位置検出器3は、上記4つのセンサ13〜16により互いに補間しながら車両の現在位置を検出するように構成されており、高精度の位置検出機能を有している。
【0009】
尚、位置検出精度をそれほど必要としない場合には、4つのセンサ13〜16のうちの何れかで(または複数のセンサの組み合わせで)位置検出器3を構成しても良い。また、車両のステアリングの回転センサや、ホイールの車輪センサ等を適宜組み合わせて位置検出器3を構成しても良い。
操作スイッチ群4は、表示部9の表示画面の上面に設けられたタッチスイッチ(タッチパネル)と、表示部9の周辺部に設けられたメカニカルなプッシュスイッチ(図示しない)等とから構成されている。
【0010】
地図データ入力部5は、CD−ROM、DVD−ROM、HDD、メモリ等を読み取り可能な読取装置で構成されており、地図データ等を入力するための装置である。
車線状態認識センサ6は、図2に示すように、自動車(車両)17の両側面部のほぼ中央部に配設された例えばCCDカメラからなる白線検出センサ18a、18bから構成されている。この場合、白線検出センサ18a、18bにより検出された画像データを画像認識処理することにより、自動車17の両側の道路の表面に描かれた車線状態が「直線」、「破線」、「線なし」のいずれであるかを認識することが可能な構成となっている。
【0011】
そして、制御回路2は、上記車線状態認識センサ6により認識された車線状態に基づいて自動車17が走行している車線を予測するように構成されている。例えば、自動車17の左側に「直線」が検出され、右側に「破線」が検出された場合には、自動車17は、現在、左車線を走行していると予測することができる。
対象物運動状態認識センサ7は、図2に示すように、自動車17の両側面部の前後部に配設された4個の赤外線センサ19a、19b、19c、19dから構成されている。各赤外線センサ19a、19b、19c、19dは、赤外線を投光し、物体(対象物)で反射した反射光(赤外線)を受光したとき、物体を検出し、反射光を受光しないとき、物体を検出しない構成となっている。
【0012】
そして、上記4個の赤外線センサ19a、19b、19c、19dの検出信号に基づいて、自動車17の周囲(左右両側)の対象物が自動車17と同じ方向に走行しているか否か、また、静止しているか否かを認識し、これら認識結果から自動車17の走行車線を予測することが可能なように構成されている。
具体的には、まず、片側の前後の赤外線センサ19a、19b(19c、19d)の検出順序(反応順序)により、自分の自動車17から見た片側の対象物の移動方向を求める。次に、赤外線センサ19a、19b(19c、19d)からの検出信号に基づいて、自分の自動車17に対する対象物の移動速度(相対速度)を測定する。この測定結果と、自分の自動車17の移動速度とから、対象物が静止している物体であるか、同じ進行方向に走行している自動車であるか、反対の進行方向に(即ち、対向車線を)走行している自動車であるかを認識するように構成されている。
【0013】
そして、上記認識結果に基づいて、自分の自動車17が走行している道路の車線を、例えば次の表に示すようにして、予測することが可能である。尚、自分の自動車17の移動速度を例えば50kmとする。
【0014】
【表1】
また、車線変更検出センサ8は、図2に示すように、自動車17の下面の中央部において左右に離して配設された例えばCCDカメラからなる2個の白線検出センサ20a、20bから構成されている。各白線検出センサ20a、20bは、検出した画像データを画像認識処理することにより、各センサ20a、20bの下方の道路の表面上に「直線」や「破線」等が描かれているか否かを検出することが可能になっている。
【0015】
この構成の場合、自動車17が車線変更を実行すると、上記2個の白線検出センサ20a、20bが順次白線を検出する。このとき、右の白線検出センサ20aが先に白線を検出し、左の白線検出センサ20bが後になるように検出した場合、自動車17は右車線に移動(車線変更)したと判断することができる。そして、反対に、左の白線検出センサ20bが先に白線を検出し、右の白線検出センサ20aが後になるように検出した場合、自動車17は左車線に移動(車線変更)したと判断することができる。
【0016】
また、表示部9は、地図を表示するための例えばカラー液晶ディスプレイで構成されており、地図データ(道路データ、文字データ及び背景データ等)、自車位置マーク、誘導経路等の付加データ等を重ねて表示することが可能なように構成されている。音声出力装置10は、音声案内の各種のメッセージや操作音等を出力する機能を有している。また、外部メモリ11は、メモリスティックやメモリカードや磁気テープ等の読取装置で構成されており、地図データや音楽データや映像データ等を入力するための装置である。
【0017】
尚、ユーザーは、図字しないリモコンを操作することにより、リモコンセンサ12を介して制御回路2へ各種の操作信号を与えるように構成されている。また、制御回路2は、図示しない通信装置(例えばVICS通信装置や、携帯電話機(専用の携帯電話端末や汎用の携帯電話機等)など)を介して外部の情報供給センタ(例えばVICSセンタや種々の情報センタ等)との間でデータを送受信することができるように構成されている。
【0018】
また、制御回路2は、現在位置(出発地)から目的地までの最適経路(誘導経路)を自動的に計算して設定する機能(経路計算機能)を備えている。尚、自動的に最適経路を設定する方法としては、例えばダイクストラ法等を使用している。また、目的地は、ユーザーが操作スイッチ群4やリモコンを操作して設定することが可能な構成となっている。そして、制御回路2は、表示部7に表示されている地図上に上記目的地までの最適経路(誘導経路)を重ねて表示する機能や、現在位置を上記地図上に位置付けるマップマッチング処理を実行する機能等を備えている。
【0019】
更にまた、制御回路2は、ジャイロスコープ14及び車速センサ15からの各検出信号と、地図データとに基づいて、自動車17が進入する車線を予測することができるように構成されている。例えば、一般の道路(片側に複数車線がある道路)の交差点において、自動車17が右折または左折する場合、どの車線に入っていくのか判定が困難である。このような場合に、制御回路2は、交差点の大きさのデータ(地図データ)と、自動車17が右折(左折)する際の右折(左折)角度(ジャイロスコープ14による検出値)と、自動車17の走行速度(車速センサ15による検出値)とに基づいて、どの車線に入ったかを予測するようにしている。
【0020】
具体的には、自動車17が右折(左折)時に90度回転するのに、10秒かかったとすると共に、そのときの走行速度が10kmであったとする。すると、右折(左折)時に、
(10/3600)*10km
進んだことになる。ここで、地図データから、交差点の大きさを把握し、計算された走行距離で入ると考えられる車線を、進入車線であると予測するのである。この場合、制御回路2が、車線予測手段としての機能を備えている。尚、ジャイロスコープ14に代えて、自動車17の右折(左折)角度を取得可能なセンサ(例えばステアリングの回転センサやジャイロセンサ等)を用いるように構成しても良い。
【0021】
そして、本実施例の場合、上記制御回路(車線予測手段)2と、前記車線変更検出センサ(車線変更検出手段)8から、自動車(車両)17の走行状況(走行状態)を検出する検出手段が構成されている。また、前記車線状態認識センサ(車線状態認識手段)6と、前記対象物運動状態認識センサ(対象物運動状態認識手段)7とから、自動車(車両)17の周囲の状態を認識する認識手段が構成されている。
【0022】
次に、上記構成のカーナビゲーション装置1の作用、特には、走行している車線を認識する制御の動作について、図3のフローチャートも参照して説明する。
まず、図3のステップS1において、制御回路2は、地図データから現在走行している道路の車線数の情報を取得する。続いて、ステップS2へ進み、制御回路2は、ジャイロスコープ14及び車速センサ15からの各検出信号と、地図データからの情報とに基づいて、自動車17が進入する車線を予測する。この場合、予測した車線の認識レベルを示すカウンタをインクリメントしておく。
【0023】
次に、ステップS3へ進み、制御回路2は、車線状態認識センサ6(白線検出センサ18a、18b)により、自動車17の両側の車線状態が「直線」、「破線」、「線なし」のいずれであるかを認識する。更に、制御回路2は、上記認識した車線状態に基づいて自動車17が走行している車線を予測すると共に、予測した車線の認識レベルを示すカウンタをインクリメントする。
【0024】
そして、ステップS4へ進み、制御回路2は、対象物運動状態認識センサ7(赤外線センサ19a、19b、19c、19d)により、自動車17の周囲(左右両側)の対象物が自動車17と同じ方向に走行しているか否か、また、静止しているか否かを認識し、これら認識結果から自動車17の走行車線を予測する。また、予測した車線の認識レベルを示すカウンタをインクリメントしておく。
【0025】
続いて、ステップS5へ進み、制御回路2は、車線変更検出センサ8(白線検出センサ20a、20b)により、自動車17が左車線または右車線に車線変更したことを検出したら、車線変更後の車線の認識レベルを示すカウンタをインクリメントしておく。
次に、ステップS6へ進み、制御回路2は、上記した4つのステップS2、S3、S4,S5で予測された車線の中から、認識レベルを示すカウンタの値が最も大きい車線を選び、この車線を自動車17が走行している車線として特定(検出)するように構成されている。この場合、制御回路2が、本発明の特定手段としての機能を有している。そして、ステップS7へ進み、同一の道路(または車線)を走行しているかどうかを判断し、同一の道路(または車線)を走行しているときは、「YES」へ進み、ステップS3へ戻り、前述した認識処理を設定時間間隔で繰り返し実行するように構成されている。
【0026】
また、自動車17が左折、右折、車線変更等を行った場合には、ステップS7において、同一の道路(または車線)を走行しなくなるから、「NO」へ進み、ステップS1へ戻る。そして、地図データから道路の車線数のデータを取得する処理(ステップS1)と、進入車線予測処理(ステップS2)とから前述した処理を繰り返し実行するように構成されている。
【0027】
このような構成の本実施例によれば、自動車17の進入車線を予測すると共に、自動車17の両側の車線状態を認識し、また、自動車17の両側の対象物の運動状態を認識し、更に、自動車17の車線変更を検出するようにし、これら認識結果や検出結果に基づいて自動車17が走行する車線を特定するように構成したので、従来構成に比べて、車線の特定精度(認識精度)を高くすることができる。
【0028】
尚、上記実施例においては、自動車17の進入車線を予測する機能と、自動車17の車線変更を検出する機能と、自動車17の両側の車線状態を認識する機能と、自動車17の両側の対象物の運動状態を認識する機能とを全て用いるように構成したが、これに限られるものではなく、上記4つの機能のうちのいくつかを適宜組み合わせて用いたり、他のセンサにより検出したセンサ情報を加えて用いたりするように構成することが可能である。
【図面の簡単な説明】
【0029】
【図1】本発明の一実施例を示すカーナビゲーション装置のブロック図
【図2】各種のセンサの配設位置を示す図
【図3】フローチャート
【符号の説明】
【0030】
図面中、1はカーナビゲーション装置(走行車線認識装置)、2は制御回路(車線予測手段、特定手段)、3は位置検出器、5は地図データ入力部、6は車線状態認識センサ(車線状態認識手段)、7は対象物運動状態認識センサ(対象物運動状態認識手段)、8は車線変更検出センサ(車線変更検出手段)、9は表示部、14はジャイロスコープ、15は車速センサ、17は自動車(車両)、18a、18bは白線検出センサ、19a、19b、19c、19dは赤外線センサ、20a、20bは白線検出センサを示す。
【特許請求の範囲】
【請求項1】
複数の車線を備えた道路を車両が走行しているときに、走行している車線を特定するものであって、
前記車両の走行状況を検出する検出手段と、
前記車両の周囲の状態を認識する認識手段と、
前記検出手段により検出した走行状況及び前記認識手段により認識した周囲状態に基づき前記車両が走行する車線を特定する特定手段と
を備えることを特徴とする車両の走行車線認識装置。
【請求項2】
前記検出手段は、
前記車両の進入車線を予測する車線予測手段と、
前記車両の車線変更を検出する車線変更検出手段と
から構成されていることを特徴とする請求項1記載の車両の走行車線認識装置。
【請求項3】
前記認識手段は、
前記車両の両側の車線状態を認識する車線状態認識手段と、
前記車両の両側の対象物の運動状態を認識する対象物運動状態認識手段と
から構成されていることを特徴とする請求項1または2記載の車両の走行車線認識装置。
【請求項1】
複数の車線を備えた道路を車両が走行しているときに、走行している車線を特定するものであって、
前記車両の走行状況を検出する検出手段と、
前記車両の周囲の状態を認識する認識手段と、
前記検出手段により検出した走行状況及び前記認識手段により認識した周囲状態に基づき前記車両が走行する車線を特定する特定手段と
を備えることを特徴とする車両の走行車線認識装置。
【請求項2】
前記検出手段は、
前記車両の進入車線を予測する車線予測手段と、
前記車両の車線変更を検出する車線変更検出手段と
から構成されていることを特徴とする請求項1記載の車両の走行車線認識装置。
【請求項3】
前記認識手段は、
前記車両の両側の車線状態を認識する車線状態認識手段と、
前記車両の両側の対象物の運動状態を認識する対象物運動状態認識手段と
から構成されていることを特徴とする請求項1または2記載の車両の走行車線認識装置。
【図1】

【図2】
【図3】
【図2】
【図3】
【公開番号】特開2006−4223(P2006−4223A)
【公開日】平成18年1月5日(2006.1.5)
【国際特許分類】
【出願番号】特願2004−180602(P2004−180602)
【出願日】平成16年6月18日(2004.6.18)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成18年1月5日(2006.1.5)
【国際特許分類】
【出願日】平成16年6月18日(2004.6.18)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]