
車両の障害物検知装置
【目的】旋回時に、走行路の極力先方まで障害物検知を可能としつつ、旋回内側にある建物等を走行路上にある障害物として誤って検知するのを防止する。
【構成】旋回内側へレ−ダの検知エリアを拡大することを前提としつつ、ブラインドカ−ブの際にはこの検知エリアの拡大が禁止あるいはオ−プンカ−ブの場合に比して拡大幅が小さくされる。また、左右一対のレ−ダ2L、2Rを備えているときは、旋回時には旋回外側にあるレ−ダのみによって障害物検知を行なう。レ−ダを左右移動式として、旋回時には旋回外側端にレ−ダが位置される。
【構成】旋回内側へレ−ダの検知エリアを拡大することを前提としつつ、ブラインドカ−ブの際にはこの検知エリアの拡大が禁止あるいはオ−プンカ−ブの場合に比して拡大幅が小さくされる。また、左右一対のレ−ダ2L、2Rを備えているときは、旋回時には旋回外側にあるレ−ダのみによって障害物検知を行なう。レ−ダを左右移動式として、旋回時には旋回外側端にレ−ダが位置される。
【発明の詳細な説明】
【0001】
【産業上の利用分野】本発明はレ−ダ装置を利用して車両の進行方向にある障害物を検知するようにした車両の障害物検知装置に関するものである。
【0002】
【従来の技術】車両の進行方向にある障害物を検知することは、未然に衝突等の事故を防ぐ上で好ましいものであり、このため、レ−ダ装置を利用して、車両進行方向にある障害物を検知することが提案されている。
【0003】特公昭55−45412号公報のものでは、旋回方向に向けてレ−ダ装置の検知エリアを設定するものが提案されている。特開平3−6418号公報には、レ−ダ装置の検知方向を、前方車両に追従させるものが提案されている。
【0004】
【発明が解決しようとする課題】レ−ダ装置により車両進行方向にある障害物を検知する場合、旋回時には、極力カ−ブの先の方までレ−ダ装置の走査ビ−ムを到達させることが望まれるものである。すなわち、直進走行時には、走査ビ−ムを前方に向けて所定角度範囲でスキャンさせておけば、走査ビ−ムの最大到達距離内にある障害物を容易に検知することができるが、カ−ブは曲線とされる一方、走査ビ−ムは直線であるので、車両が通過するであろうカ−ブの先の方まで走査ビ−ムを到達させることは、レ−ダ装置の検知エリアを直進走行時と同じように設定したままではむすかいものとなる。
【0005】このため、旋回時には、旋回内側へ向けて検知エリアを拡大することも考えられる。しかしながら、検知エリアを単に旋回内側に拡大しただけでは、ブラインドカ−ブの場合つまりカ−ブの内側に視覚の障害物例えば高い建物やガ−ドレ−ルが存在する場合には、この建物やガ−ドレ−ルを車両進行方向にある障害物として誤って検知してしまうことになる(ノイズが多くなる)。
【0006】したがって、本発明の目的は、旋回時において、誤った障害物検知を避けつつ、実際に通過するであろう走行路の極力先の方までレ−ダ装置の検知ビ−ムを到達させることができるようにした車両の障害物検知装置を提供することにある。
【0007】前記目的を達成するため、本発明はその第1の構成として次のようにしてある。すなわち、車両の進行方向にある障害物を検知するためのレ−ダ装置と、走行路がブラインドカ−ブであるか否かを検出するカ−ブ状態検出手段と、旋回時に、前記カ−ブ状態検出手段によりブラインドカ−ブが検出されていないことを条件として、旋回方向に前記レ−ダ装置の検知エリアを拡大する検知エリア変更手段と、を備えた構成としてある。
【0008】前記目的を達成するため、本発明はその第2の構成として次のようにしてある。すなわち、それぞれ車両の進行方向にある障害物を検知するための左右一対のレ−ダ装置と、旋回時に、前記左右一対のレ−ダ装置のうち旋回外側にあるレ−ダ装置のみを利用して障害物の検知を行なわせるレ−ダ選択手段と、を備えた構成としてある。
【0009】前記目的を達成するため、本発明はその第3の構成として次のようにしてある。すなわち、車体左右方向に移動自在に設けられ、車両の進行方向にある障害物を検知するためのレ−ダ装置と、前記レ−ダ装置を車体左右方向に駆動するための駆動手段と、旋回時に、前記駆動手段を制御して前記レ−ダ装置を旋回外側方向へ移動させる位置制御手段と、を備えた構成としてある。
【0010】前記目的を達成するため、本発明はその第4の構成として次のようにしてある。すなわち、それぞれ車両の進行方向にある障害物を検知するための左右一対のレ−ダ装置と、旋回時に、旋回内側にあるレ−ダ装置の検知エリアを直進時と同様に設定したまま、旋回外側にあるレ−ダ装置の検知エリアを直進時に比して旋回内側へ拡大させる検知エリア変更手段と、を備えた構成としてある。
【0011】前記目的を達成するため、本発明はその第5の構成として次のようにしてある。すなわち、車両の進行方向にある障害物を検知するためのレ−ダ装置と、走行路がブラインドカ−ブであるか否かを検出するカ−ブ状態検出手段と、旋回時に、前記レ−ダ装置の検知エリアを旋回内側へ拡大させると共に、前記カ−ブ状態検出手段によりブラインドカ−ブが検出されたときはブラインドカ−ブが検出されないときに比して前記検知エリアの拡大幅が小さくなるように設定する検知エリア変更手段と、を備えた構成としてある。
【0012】
【発明の効果】請求項1に記載されたような構成とすることにより、通常はレ−ダ装置の検知エリアを旋回内側に拡大することにより実際に通過するであろう走行路の先の方にある障害物を検知可能としつつ、ブラインドカ−ブのときはこの検知エリアの拡大を禁止してカ−ブの内側にある建物等を走行路上にある障害物であるとして誤って検知してしまう事態を防止できる。
【0013】請求項2に記載されたような構成とすることにより、旋回時には、旋回内側にあるレ−ダ装置に比して、走行路の先の方まで検知可能でかつカ−ブの内側にある建物等を検知するおそれの少ない旋回外側のレ−ダ装置を用いた障害物検知を行なうことができる。
【0014】請求項3に記載されたような構成とすることにより、1つのレ−ダ装置を用いて、請求項2で得られるのと同様の効果を得ることができる。
【0015】請求項4に記載されたような構成とすることにより、左右のレ−ダ装置を共に利用した障害物検知を行ないつつ、請求項2の場合と同様に効果を得ることができる。
【0016】請求項5に記載されたような構成とすることにより、旋回内側方向に極力検知エリアを広げつつ、請求項1と同様の効果を得ることができる。
【0017】
【実施例】以下本発明の実施例を添付した図面に基づいて説明する。
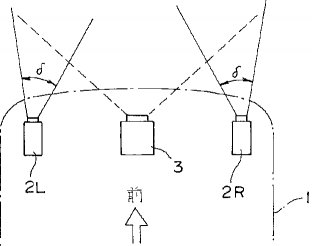
第1実施例(図1〜図10)図1において、自動車1の前端部には、その左端部位置において左レ−ダ装置(の送受信部)2Lが設けられ、右端部位置において右レ−ダ装置(の送受信部)2Rが設けられ、中央位置においてカメラ3が設けられている。各レ−ダ装置2L、2Rはそれぞれ、レ−ザ−を走査ビ−ムとするスキャン式とされている。
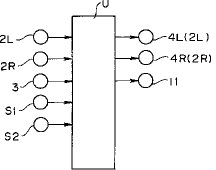
【0018】自動車1には、レ−ダ装置2L、2Rやカメラ3を利用した危険回避の制御や、レ−ダ装置2L、2Rの使用態様等を制御するための制御装置が塔載され、その制御系統が図2に示される。この図2において、Uはマイクロコンピュ−タを利用して構成された制御ユニットで、この制御ユニットUには、前記レ−ダ装置2L、2R、カメラ3からの信号の他、舵角センサS1、車速センサS2からの信号が入力される。また、制御ユニットUからは、レ−ダ装置2L、2Rの検知エリアを変更するためのアクチュエ−タ4L、4R、および危険回避のための危険回避装置11に対して出力される。危険回避装置11は、例えば、自動ブレ−キ装置、自動操舵装置さらには警報機のいずれか1つあるいは任意の組み合わせとして構成される。
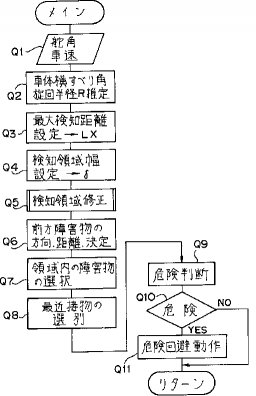
【0019】制御ユニットUの制御内容について、図3R>3、図4に示すフロ−チャ−トを参照しつつ説明するが、以下の説明でQはステップを示す。先ず、図3のQ1において、舵角と車速とが読込まれた後、これ等の信号に基づいて、Q2において車体横すべり角と旋回半径とが推定され、さらにQ3においてレ−ダ装置2L、2Rの最大検知距離(走査ビ−ムの最大到達距離)が決定される。さらに、Q4において、最大検知距離に基づいて、レ−ダ装置の検知エリア幅つまりスキャン角δが決定される。図5には、基本的なスキャン角δの設定例を示してある。
【0020】Q5において、後述する検知エリア幅の修正がなされた後、Q6において、前方障害物の方向と距離とが決定される。この後Q7において、カメラ3からの画像情報をも参照して検知エリア内にある障害物の選択がなされ、Q8において選択された障害物のうちもっとも近い障害物例えばもっとも近い位置にある前方車両が選別される。
【0021】Q9では、Q8の選別結果からして、危険であるか否か例えばもっとも近い位置にある前方車両と接触する可能性があるか否かの判断がなされる。この後、Q10において、Q9での判断結果からして、危険であるか否かが判別され、危険であると判別されたならば、Q11において、危険回避の動作が実行される(危険回避装置11の作動)。
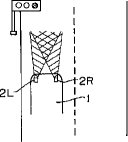
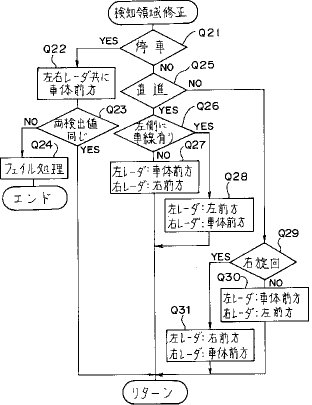
【0022】図3のQ5の内容が、図4に示される。この図4のQ21において、現在自動車が停車しているか否かが判別される。このQ21の判別でYESのときのときは、Q22において、左右のレ−ダ装置2L、2Rによる検知方向が、それぞれ車体前方として設定され、そのときの様子を図6に示してある(検知エリアをハッチングを付して示してある−以下同じ)。この図6から明らかなように、左右のレ−ダ装置2L、2R共に、車体外側への検知角度は小さく、車体内側への検知角度は大きいものとされるが、左右対称となるように検知エリアが構成される。
【0023】Q22の後、Q23において、両レ−ダ装置2L、2Rの検出値が同じであるか否かが判別される。このQ23の判別でYESのときは、左右のレ−ダ装置2L、2Rは共に正常であるとしてそのままリタ−ンされるが、Q23の判別でNOのときは、いずれかのレ−ダ装置2L、2Rに異常があるときであるとして、Q24においてフェイル処理例えば故障を示す警報ランプが点灯された後、制御が終了される。Q23の判別はつまるところ、停車時においては、前方車両がある場合あるいは無い場合共に、同じような距離に同じものを同時に2つのレ−ダ装置2L、2Rで検知する可能性が高く、この場合両レ−ダ装置2L、2Rが共に正常であれば両レ−ダ装置2L、2Rの検出値は同じになるはずであるという前提に基づくものである。
【0024】停車時であっても、左右一方に大きく偏った位置に障害物が存在するようなときは、両レ−ダ装置2L、2Rが共に正常であっても異なる検出値を示すことが考えられるので、この場合は、例えばカメラ3を利用して、両レ−ダ装置2L、2等が共に同じ検出値を示すような状況にあることを確認した後Q23の判別を行なうようにしてもよい。なお、両レ−ダ装置2L、2Rの検出値が同じということは、検出値が全く同じという場合は勿論のこと、所定の許容誤差範囲にある場合をも含むものである。
【0025】前記Q21の判別でNOのときのときは、Q25において、直進時であるか否かが判別される。このQ25の判別でYESのときは、Q26において、左側に車線があるか否かが判別される。このQ26の判別でNOのときは、Q27において、図7に示すように、左レ−ダ装置2Lにおける検知エリアは車体前方に向かうように設定されると共に、右のレ−ダ装置2Rにおける検知エリアは右側に偏った方向に設定される。
【0026】また、Q28の判別でYESのときのときは、Q28において、図8に示すように、左レ−ダ装置2Lにおける検知エリアは左側に偏った方向に設定されると共に、右のレ−ダ装置2Rにおける検知エリアは車体前方に設定される。このQ26〜Q28の処理は、自車が走行する走行路における前方障害物検知を行ないつつ、隣の走行路の前方障害物をも検知できるようにするための処理となる。
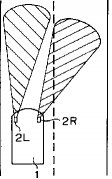
【0027】前記Q25の判別でNOのときのときは、カ−ブを走行する旋回時である。このときは、Q29において、右旋回であるか否かが判別される。このQ29の判別でNOときは、Q30において、図9に示すように、左レ−ダ装置2Lにおける検知エリアは車体前方に向かうように設定されると共に、右のレ−ダ装置2Rにおける検知エリアは左側に偏った方向に設定される。これにより、左レ−ダ装置2Lによる反対車線側の障害物検知を行ないつつ、自車が通過する走行路のかなり先の障害物検知を行なうことができる。
【0028】とりわけ、カ−ブがブラインドカ−ブとなっていて、旋回内側に高い建物等が存在しても、右レ−ダ装置2Rにおける検知エリアの前述した設定によって、この高い建物と走査ビ−ムとの干渉を行なうことなく、自車が通過する予定の走行路の遠くまで走査ビ−ムを到達させることが可能になる。ちなみに、左側レ−ダ装置2Lの検知エリアを旋回方向に偏った方向に設定したときは、カ−ブの内側に近い位置からの走査ビ−ム発信となるので、カ−ブの内側にある建物等に走査ビ−ムが衝突し易くなって、自車が走行する予定の遠い先の障害物を検知することが不可能になる。
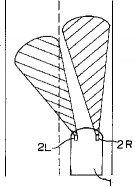
【0029】Q29の判別でYESのときは、Q31において、図10に示すように、左レ−ダ装置2Lにおける検知エリアは右前方に偏った方向に設定されると共に、右のレ−ダ装置2Rにおける検知エリアは車体前方方向に設定される。このQ31の処理によって、前述した左旋回時(Q30)で説明したのと同様の利点が得られる。
【0030】第2実施例(図11〜図13)図11、図12は、本発明の第2実施例を示すもので、前記実施例と同一構成要素には同一符号を付してその重複した説明は省略する(このことは以下のさらに別の実施例についても同じ)。本実施例では、旋回時には、ブラインドカ−ブであるか否かによって、左右のレ−ダ装置2L、2Rのうち障害物検知として用いるレ−ダ装置の選択を変更するようにしたものである。
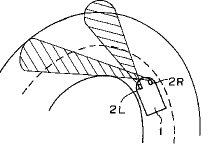
【0031】すなわち、ブラインドカ−ブの走行の際は、旋回外側のレ−ダ装置のみが障害物検知のために用いられる。より具体的には、図12に示す右旋回時においては、左レ−ダ装置2Lのみを用いた障害物検知が行なわれる(図示は略すが左旋回時には右レ−ダ装置2Rのみを用いた障害物検知とされる)。このように、極力カ−ブの内側から遠く離れた位置から走査ビ−ムを発信することにより、旋回内側から走査ビ−ムを発信したときよりも、旋回内側にある建物等に走査ビ−ムが邪魔されることがなくなってより遠くの障害物を検知することができ、しかも自車が通過する予定の走行路の障害物検知を行なうことができる。
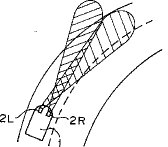
【0032】一方、旋回内側の視界が開けたオ−プンカ−ブのときは、旋回内側のレ−ダ装置のみが用いられる、具体的には、図13に示す右旋回時においては、右レ−ダ装置2Rのみを利用して障害物検知が行なわれる(図示は略するが、左旋回時には、左レ−ダ装置2Lのみを用いた障害物検知とされる)。このように、オ−プンカ−ブのときは、旋回内側に走査ビ−ムを邪魔するものがないので、旋回内側寄りのレ−ダ装置を用いることにより、旋回外側のレ−ダ装置を用いた場合に比してより遠くの障害物を検知する上で好ましいものとなる。
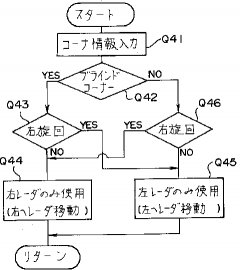
【0033】前述したような、旋回時における左右のレ−ダ装置2L、2Rのいずかの選択を行なうための制御例を示すフロ−チャ−トが、図11に示される。この図1111において、Q41におけるコ−ナ−情報入力およびこれに基づくQ42でのブラインドカ−ブであるか否かの判定が行なわれるが、ブラインドカ−ブであるか否かは、例えばカメラ3でとらえた画像情報から判定することができる。この他、カ−ブの手前で路面に埋設された磁性体によって与えられるコ−ナ−情報を、車両に塔載した磁性体検知装置によって読取って、ブラインドカ−ブであるか否かを判断することもできる。なお、図11におけるその他のステップの内容は今迄の説明で明らかなので、これ以上の説明は省略する。なお、実施例では、各レ−ダ装置2L、2Rの検知エリアそのものは、直進時のものから変更しないようにしてある。また、直進時には、左右のレ−ダ装置2L、2等を共に利用した障害物検知が行なわれる。
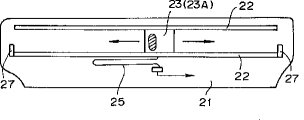
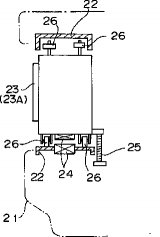
【0034】第3実施例(図14、図15)図14、図15は、本発明の第3実施例を示すものである。本実施例では、1つのレ−ダ装置を用いて前述の第2実施例(図11〜図13)と同様の作用を得ようとするものである。すなわち、図14において、自動車1の前バンパ21には、左右方向に伸ばして上下一対のガイドレ−ル22が設けられ、このガイドレ−ル22に対して、レ−ダ装置23の少なくとも発信機と受信機とを有するセンサヘッド23Aが走行自在に取付けられている。そして、センサヘッド23Aは、リニアモ−タ24によって、左右方向に駆動される。図中25はフレキシブルハ−ネス、26はガイドロ−ラ、27はリミットスイッチである。
【0035】上記センサヘッド23Aの位置は、前記第2実施例の場合に対応して、ブラインドカ−ブのときはセンサヘッド23Aが旋回外側へ移動され、オ−プンカ−ブのときは旋回内側へ移動される。つまり、図11のQ44に対応するステップにおいてセンサヘッド23Aが右側端部位置に移動され、図11のQ45に対応するステップにおいてセンサヘッド23Aが左側端部へ移動される。なお、直進時には、センサヘッド23Aは左右中央位置とされる。
【0036】第4実施例(図16)図16は、本発明の第4実施例を示すものである。本実施例では、車体の前部中央にのみ1つのレ−ダ装置(図示略)を設けてある。そして、旋回時には、基本的に旋回内側へ検知エリアを拡大させる一方、ブラインドカ−ブのときはこの検知エリアの拡大を禁止するようにしてある。なお、直進時には、検知エリアは左右均等に広がるように設定される。
【0037】図16に示すフロ−チャ−トにおいて、Q51でのコ−ナ情報入力が行なわれた後、Q52において、ブラインドカ−ブであるか否かが判別される。このQ52の判別でNOのときのときは、Q53において、右旋回時であるか否かが判別される。このQ53の判別でYESのときは、検知エリアが右方向に所定幅△δだけ拡大される。また、Q53の判別でNOのときは、Q55において、検知エリアが左方向に所定幅△δだけ拡大される。そして、Q52の判別でYESのときは、検知エリアの拡大が行なわれることなくそのままリタ−ンされる。
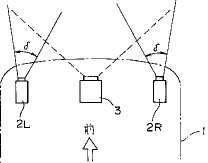
【0038】第5実施例(図17、図18)図17、図18は本発明の第5実施例を示すものである。本実施例では、自動車の前部中央に1つのレ−ダ装置31のみを設けた場合に、旋回内側に常に検知エリアを拡大するものを前提として、ブラインドカ−ブとオ−プンカ−ブとで拡大幅を変更するようにしたものである。なお、直進時には、検知エリアは左右均等に設定される。
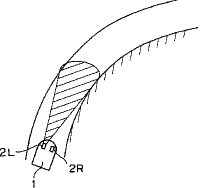
【0039】先ず、ブラインドカ−ブの際は、図17に示すように、検知エリアを旋回内側に拡大する一方、この拡大された検知エリアのもっとも旋回内側端(となる走査ビ−ム)がカ−ブの旋回内側縁の接線となるように、検知エリアの拡大幅が設定される。図17では、上記旋回内側縁とこれに対する接線となる走査ビ−ムとの交点をαで示してある。これにより、旋回内側に位置する高い建物等に対する走査ビ−ムの衝突を避けつつ、カ−ブの遠い先まで走査ビ−ムを到達させることができる。
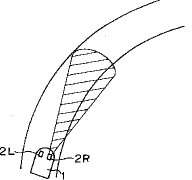
【0040】オ−プンカ−ブの際は、図18に示すように、検知エリアの旋回内側端となる走査ビ−ムの最大到達距離をLXとして示したとき、この最大到達距離LXのところで丁度カ−ブの旋回内側縁と当接する(この当接位置を符号βで示す)ように、検知エリアの旋回内側への拡大幅が設定される。これにより、極力旋回内側の障害物検知を行ないつつ、極力遠い先の障害物検知を行なうことができる。
【0041】以上実施例について説明したが、旋回内側への検知エリアの拡大は、検知エリアそのものを全体的に拡大して得るのは勿論のこと(スキャン角δの増大)、スキャン角δは変更することなく検知方向を旋回内側へオフセットすることにより得るようにしてもよい。
【図面の簡単な説明】
【図1】本発明の第1実施例を示すもので、自動車の前部に塔載された左右一対のレ−ダ装置を示す簡略平面図。
【図2】第1実施例における制御系統を示す図。
【図3】第1実施例における制御内容を示すフロ−チャ−ト。
【図4】第1実施例における制御内容を示すフロ−チャ−ト。
【図5】第1実施例における左右レ−ダ装置の基本的な検知エリア設定例を示す図。
【図6】第1実施例において、車両が停車しているときの検知エリアを示す図。
【図7】第1実施例において、直進時でかつ右側に車線があるときの検知エリアを示す図。
【図8】第1実施例において、直進時でかつ左側に車線があるときの検知エリアを示す図。
【図9】第1実施例において、左旋回時のときの検知エリアを示す図。
【図10】第1実施例において、右旋回時のときの検知エリアを示す図。
【図11】本発明の第2実施例における制御内容を示すフロ−チャ−ト。
【図12】第2実施例におけるブラインドカ−ブのときの検知エリアを示す図。
【図13】第2実施例におけるオ−プンカ−ブのときの検知エリアを示す図。
【図14】本発明の第3実施例を示すもので、レ−ダ装置のセンサヘッドを左右移動式とした場合の正面図。
【図15】図14におけるセンサヘッド部分での縦断面図。
【図16】本発明の第4実施例を示すフロ−チャ−ト。
【図17】ブラインドカ−ブでの好ましい検知エリア拡大幅の設定例を示す図。
【図18】オ−プンカ−ブでの好ましい検知エリア拡大幅の設定例を示す図。
【符号の説明】
1:自動車
2L:左レ−ダ装置
2R:右レ−ダ装置
3:カメラ
4L:左レ−ダ装置用の検知エリア変更アクチュエ−タ
4R:右レ−ダ装置用の検知エリア変更アクチュエ−タ
U:制御ユニット
23A:移動式センサヘッド
24:リニアモ−タ(センサヘッド駆動用)
α:最内側走査ビ−ムとカ−ブ内端縁との接点
β:最内側走査ビ−ムとカ−ブ内端縁との交点
【0001】
【産業上の利用分野】本発明はレ−ダ装置を利用して車両の進行方向にある障害物を検知するようにした車両の障害物検知装置に関するものである。
【0002】
【従来の技術】車両の進行方向にある障害物を検知することは、未然に衝突等の事故を防ぐ上で好ましいものであり、このため、レ−ダ装置を利用して、車両進行方向にある障害物を検知することが提案されている。
【0003】特公昭55−45412号公報のものでは、旋回方向に向けてレ−ダ装置の検知エリアを設定するものが提案されている。特開平3−6418号公報には、レ−ダ装置の検知方向を、前方車両に追従させるものが提案されている。
【0004】
【発明が解決しようとする課題】レ−ダ装置により車両進行方向にある障害物を検知する場合、旋回時には、極力カ−ブの先の方までレ−ダ装置の走査ビ−ムを到達させることが望まれるものである。すなわち、直進走行時には、走査ビ−ムを前方に向けて所定角度範囲でスキャンさせておけば、走査ビ−ムの最大到達距離内にある障害物を容易に検知することができるが、カ−ブは曲線とされる一方、走査ビ−ムは直線であるので、車両が通過するであろうカ−ブの先の方まで走査ビ−ムを到達させることは、レ−ダ装置の検知エリアを直進走行時と同じように設定したままではむすかいものとなる。
【0005】このため、旋回時には、旋回内側へ向けて検知エリアを拡大することも考えられる。しかしながら、検知エリアを単に旋回内側に拡大しただけでは、ブラインドカ−ブの場合つまりカ−ブの内側に視覚の障害物例えば高い建物やガ−ドレ−ルが存在する場合には、この建物やガ−ドレ−ルを車両進行方向にある障害物として誤って検知してしまうことになる(ノイズが多くなる)。
【0006】したがって、本発明の目的は、旋回時において、誤った障害物検知を避けつつ、実際に通過するであろう走行路の極力先の方までレ−ダ装置の検知ビ−ムを到達させることができるようにした車両の障害物検知装置を提供することにある。
【0007】前記目的を達成するため、本発明はその第1の構成として次のようにしてある。すなわち、車両の進行方向にある障害物を検知するためのレ−ダ装置と、走行路がブラインドカ−ブであるか否かを検出するカ−ブ状態検出手段と、旋回時に、前記カ−ブ状態検出手段によりブラインドカ−ブが検出されていないことを条件として、旋回方向に前記レ−ダ装置の検知エリアを拡大する検知エリア変更手段と、を備えた構成としてある。
【0008】前記目的を達成するため、本発明はその第2の構成として次のようにしてある。すなわち、それぞれ車両の進行方向にある障害物を検知するための左右一対のレ−ダ装置と、旋回時に、前記左右一対のレ−ダ装置のうち旋回外側にあるレ−ダ装置のみを利用して障害物の検知を行なわせるレ−ダ選択手段と、を備えた構成としてある。
【0009】前記目的を達成するため、本発明はその第3の構成として次のようにしてある。すなわち、車体左右方向に移動自在に設けられ、車両の進行方向にある障害物を検知するためのレ−ダ装置と、前記レ−ダ装置を車体左右方向に駆動するための駆動手段と、旋回時に、前記駆動手段を制御して前記レ−ダ装置を旋回外側方向へ移動させる位置制御手段と、を備えた構成としてある。
【0010】前記目的を達成するため、本発明はその第4の構成として次のようにしてある。すなわち、それぞれ車両の進行方向にある障害物を検知するための左右一対のレ−ダ装置と、旋回時に、旋回内側にあるレ−ダ装置の検知エリアを直進時と同様に設定したまま、旋回外側にあるレ−ダ装置の検知エリアを直進時に比して旋回内側へ拡大させる検知エリア変更手段と、を備えた構成としてある。
【0011】前記目的を達成するため、本発明はその第5の構成として次のようにしてある。すなわち、車両の進行方向にある障害物を検知するためのレ−ダ装置と、走行路がブラインドカ−ブであるか否かを検出するカ−ブ状態検出手段と、旋回時に、前記レ−ダ装置の検知エリアを旋回内側へ拡大させると共に、前記カ−ブ状態検出手段によりブラインドカ−ブが検出されたときはブラインドカ−ブが検出されないときに比して前記検知エリアの拡大幅が小さくなるように設定する検知エリア変更手段と、を備えた構成としてある。
【0012】
【発明の効果】請求項1に記載されたような構成とすることにより、通常はレ−ダ装置の検知エリアを旋回内側に拡大することにより実際に通過するであろう走行路の先の方にある障害物を検知可能としつつ、ブラインドカ−ブのときはこの検知エリアの拡大を禁止してカ−ブの内側にある建物等を走行路上にある障害物であるとして誤って検知してしまう事態を防止できる。
【0013】請求項2に記載されたような構成とすることにより、旋回時には、旋回内側にあるレ−ダ装置に比して、走行路の先の方まで検知可能でかつカ−ブの内側にある建物等を検知するおそれの少ない旋回外側のレ−ダ装置を用いた障害物検知を行なうことができる。
【0014】請求項3に記載されたような構成とすることにより、1つのレ−ダ装置を用いて、請求項2で得られるのと同様の効果を得ることができる。
【0015】請求項4に記載されたような構成とすることにより、左右のレ−ダ装置を共に利用した障害物検知を行ないつつ、請求項2の場合と同様に効果を得ることができる。
【0016】請求項5に記載されたような構成とすることにより、旋回内側方向に極力検知エリアを広げつつ、請求項1と同様の効果を得ることができる。
【0017】
【実施例】以下本発明の実施例を添付した図面に基づいて説明する。
第1実施例(図1〜図10)図1において、自動車1の前端部には、その左端部位置において左レ−ダ装置(の送受信部)2Lが設けられ、右端部位置において右レ−ダ装置(の送受信部)2Rが設けられ、中央位置においてカメラ3が設けられている。各レ−ダ装置2L、2Rはそれぞれ、レ−ザ−を走査ビ−ムとするスキャン式とされている。
【0018】自動車1には、レ−ダ装置2L、2Rやカメラ3を利用した危険回避の制御や、レ−ダ装置2L、2Rの使用態様等を制御するための制御装置が塔載され、その制御系統が図2に示される。この図2において、Uはマイクロコンピュ−タを利用して構成された制御ユニットで、この制御ユニットUには、前記レ−ダ装置2L、2R、カメラ3からの信号の他、舵角センサS1、車速センサS2からの信号が入力される。また、制御ユニットUからは、レ−ダ装置2L、2Rの検知エリアを変更するためのアクチュエ−タ4L、4R、および危険回避のための危険回避装置11に対して出力される。危険回避装置11は、例えば、自動ブレ−キ装置、自動操舵装置さらには警報機のいずれか1つあるいは任意の組み合わせとして構成される。
【0019】制御ユニットUの制御内容について、図3R>3、図4に示すフロ−チャ−トを参照しつつ説明するが、以下の説明でQはステップを示す。先ず、図3のQ1において、舵角と車速とが読込まれた後、これ等の信号に基づいて、Q2において車体横すべり角と旋回半径とが推定され、さらにQ3においてレ−ダ装置2L、2Rの最大検知距離(走査ビ−ムの最大到達距離)が決定される。さらに、Q4において、最大検知距離に基づいて、レ−ダ装置の検知エリア幅つまりスキャン角δが決定される。図5には、基本的なスキャン角δの設定例を示してある。
【0020】Q5において、後述する検知エリア幅の修正がなされた後、Q6において、前方障害物の方向と距離とが決定される。この後Q7において、カメラ3からの画像情報をも参照して検知エリア内にある障害物の選択がなされ、Q8において選択された障害物のうちもっとも近い障害物例えばもっとも近い位置にある前方車両が選別される。
【0021】Q9では、Q8の選別結果からして、危険であるか否か例えばもっとも近い位置にある前方車両と接触する可能性があるか否かの判断がなされる。この後、Q10において、Q9での判断結果からして、危険であるか否かが判別され、危険であると判別されたならば、Q11において、危険回避の動作が実行される(危険回避装置11の作動)。
【0022】図3のQ5の内容が、図4に示される。この図4のQ21において、現在自動車が停車しているか否かが判別される。このQ21の判別でYESのときのときは、Q22において、左右のレ−ダ装置2L、2Rによる検知方向が、それぞれ車体前方として設定され、そのときの様子を図6に示してある(検知エリアをハッチングを付して示してある−以下同じ)。この図6から明らかなように、左右のレ−ダ装置2L、2R共に、車体外側への検知角度は小さく、車体内側への検知角度は大きいものとされるが、左右対称となるように検知エリアが構成される。
【0023】Q22の後、Q23において、両レ−ダ装置2L、2Rの検出値が同じであるか否かが判別される。このQ23の判別でYESのときは、左右のレ−ダ装置2L、2Rは共に正常であるとしてそのままリタ−ンされるが、Q23の判別でNOのときは、いずれかのレ−ダ装置2L、2Rに異常があるときであるとして、Q24においてフェイル処理例えば故障を示す警報ランプが点灯された後、制御が終了される。Q23の判別はつまるところ、停車時においては、前方車両がある場合あるいは無い場合共に、同じような距離に同じものを同時に2つのレ−ダ装置2L、2Rで検知する可能性が高く、この場合両レ−ダ装置2L、2Rが共に正常であれば両レ−ダ装置2L、2Rの検出値は同じになるはずであるという前提に基づくものである。
【0024】停車時であっても、左右一方に大きく偏った位置に障害物が存在するようなときは、両レ−ダ装置2L、2Rが共に正常であっても異なる検出値を示すことが考えられるので、この場合は、例えばカメラ3を利用して、両レ−ダ装置2L、2等が共に同じ検出値を示すような状況にあることを確認した後Q23の判別を行なうようにしてもよい。なお、両レ−ダ装置2L、2Rの検出値が同じということは、検出値が全く同じという場合は勿論のこと、所定の許容誤差範囲にある場合をも含むものである。
【0025】前記Q21の判別でNOのときのときは、Q25において、直進時であるか否かが判別される。このQ25の判別でYESのときは、Q26において、左側に車線があるか否かが判別される。このQ26の判別でNOのときは、Q27において、図7に示すように、左レ−ダ装置2Lにおける検知エリアは車体前方に向かうように設定されると共に、右のレ−ダ装置2Rにおける検知エリアは右側に偏った方向に設定される。
【0026】また、Q28の判別でYESのときのときは、Q28において、図8に示すように、左レ−ダ装置2Lにおける検知エリアは左側に偏った方向に設定されると共に、右のレ−ダ装置2Rにおける検知エリアは車体前方に設定される。このQ26〜Q28の処理は、自車が走行する走行路における前方障害物検知を行ないつつ、隣の走行路の前方障害物をも検知できるようにするための処理となる。
【0027】前記Q25の判別でNOのときのときは、カ−ブを走行する旋回時である。このときは、Q29において、右旋回であるか否かが判別される。このQ29の判別でNOときは、Q30において、図9に示すように、左レ−ダ装置2Lにおける検知エリアは車体前方に向かうように設定されると共に、右のレ−ダ装置2Rにおける検知エリアは左側に偏った方向に設定される。これにより、左レ−ダ装置2Lによる反対車線側の障害物検知を行ないつつ、自車が通過する走行路のかなり先の障害物検知を行なうことができる。
【0028】とりわけ、カ−ブがブラインドカ−ブとなっていて、旋回内側に高い建物等が存在しても、右レ−ダ装置2Rにおける検知エリアの前述した設定によって、この高い建物と走査ビ−ムとの干渉を行なうことなく、自車が通過する予定の走行路の遠くまで走査ビ−ムを到達させることが可能になる。ちなみに、左側レ−ダ装置2Lの検知エリアを旋回方向に偏った方向に設定したときは、カ−ブの内側に近い位置からの走査ビ−ム発信となるので、カ−ブの内側にある建物等に走査ビ−ムが衝突し易くなって、自車が走行する予定の遠い先の障害物を検知することが不可能になる。
【0029】Q29の判別でYESのときは、Q31において、図10に示すように、左レ−ダ装置2Lにおける検知エリアは右前方に偏った方向に設定されると共に、右のレ−ダ装置2Rにおける検知エリアは車体前方方向に設定される。このQ31の処理によって、前述した左旋回時(Q30)で説明したのと同様の利点が得られる。
【0030】第2実施例(図11〜図13)図11、図12は、本発明の第2実施例を示すもので、前記実施例と同一構成要素には同一符号を付してその重複した説明は省略する(このことは以下のさらに別の実施例についても同じ)。本実施例では、旋回時には、ブラインドカ−ブであるか否かによって、左右のレ−ダ装置2L、2Rのうち障害物検知として用いるレ−ダ装置の選択を変更するようにしたものである。
【0031】すなわち、ブラインドカ−ブの走行の際は、旋回外側のレ−ダ装置のみが障害物検知のために用いられる。より具体的には、図12に示す右旋回時においては、左レ−ダ装置2Lのみを用いた障害物検知が行なわれる(図示は略すが左旋回時には右レ−ダ装置2Rのみを用いた障害物検知とされる)。このように、極力カ−ブの内側から遠く離れた位置から走査ビ−ムを発信することにより、旋回内側から走査ビ−ムを発信したときよりも、旋回内側にある建物等に走査ビ−ムが邪魔されることがなくなってより遠くの障害物を検知することができ、しかも自車が通過する予定の走行路の障害物検知を行なうことができる。
【0032】一方、旋回内側の視界が開けたオ−プンカ−ブのときは、旋回内側のレ−ダ装置のみが用いられる、具体的には、図13に示す右旋回時においては、右レ−ダ装置2Rのみを利用して障害物検知が行なわれる(図示は略するが、左旋回時には、左レ−ダ装置2Lのみを用いた障害物検知とされる)。このように、オ−プンカ−ブのときは、旋回内側に走査ビ−ムを邪魔するものがないので、旋回内側寄りのレ−ダ装置を用いることにより、旋回外側のレ−ダ装置を用いた場合に比してより遠くの障害物を検知する上で好ましいものとなる。
【0033】前述したような、旋回時における左右のレ−ダ装置2L、2Rのいずかの選択を行なうための制御例を示すフロ−チャ−トが、図11に示される。この図1111において、Q41におけるコ−ナ−情報入力およびこれに基づくQ42でのブラインドカ−ブであるか否かの判定が行なわれるが、ブラインドカ−ブであるか否かは、例えばカメラ3でとらえた画像情報から判定することができる。この他、カ−ブの手前で路面に埋設された磁性体によって与えられるコ−ナ−情報を、車両に塔載した磁性体検知装置によって読取って、ブラインドカ−ブであるか否かを判断することもできる。なお、図11におけるその他のステップの内容は今迄の説明で明らかなので、これ以上の説明は省略する。なお、実施例では、各レ−ダ装置2L、2Rの検知エリアそのものは、直進時のものから変更しないようにしてある。また、直進時には、左右のレ−ダ装置2L、2等を共に利用した障害物検知が行なわれる。
【0034】第3実施例(図14、図15)図14、図15は、本発明の第3実施例を示すものである。本実施例では、1つのレ−ダ装置を用いて前述の第2実施例(図11〜図13)と同様の作用を得ようとするものである。すなわち、図14において、自動車1の前バンパ21には、左右方向に伸ばして上下一対のガイドレ−ル22が設けられ、このガイドレ−ル22に対して、レ−ダ装置23の少なくとも発信機と受信機とを有するセンサヘッド23Aが走行自在に取付けられている。そして、センサヘッド23Aは、リニアモ−タ24によって、左右方向に駆動される。図中25はフレキシブルハ−ネス、26はガイドロ−ラ、27はリミットスイッチである。
【0035】上記センサヘッド23Aの位置は、前記第2実施例の場合に対応して、ブラインドカ−ブのときはセンサヘッド23Aが旋回外側へ移動され、オ−プンカ−ブのときは旋回内側へ移動される。つまり、図11のQ44に対応するステップにおいてセンサヘッド23Aが右側端部位置に移動され、図11のQ45に対応するステップにおいてセンサヘッド23Aが左側端部へ移動される。なお、直進時には、センサヘッド23Aは左右中央位置とされる。
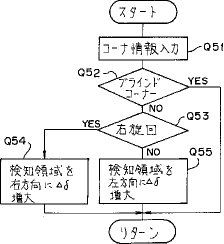
【0036】第4実施例(図16)図16は、本発明の第4実施例を示すものである。本実施例では、車体の前部中央にのみ1つのレ−ダ装置(図示略)を設けてある。そして、旋回時には、基本的に旋回内側へ検知エリアを拡大させる一方、ブラインドカ−ブのときはこの検知エリアの拡大を禁止するようにしてある。なお、直進時には、検知エリアは左右均等に広がるように設定される。
【0037】図16に示すフロ−チャ−トにおいて、Q51でのコ−ナ情報入力が行なわれた後、Q52において、ブラインドカ−ブであるか否かが判別される。このQ52の判別でNOのときのときは、Q53において、右旋回時であるか否かが判別される。このQ53の判別でYESのときは、検知エリアが右方向に所定幅△δだけ拡大される。また、Q53の判別でNOのときは、Q55において、検知エリアが左方向に所定幅△δだけ拡大される。そして、Q52の判別でYESのときは、検知エリアの拡大が行なわれることなくそのままリタ−ンされる。
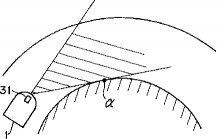
【0038】第5実施例(図17、図18)図17、図18は本発明の第5実施例を示すものである。本実施例では、自動車の前部中央に1つのレ−ダ装置31のみを設けた場合に、旋回内側に常に検知エリアを拡大するものを前提として、ブラインドカ−ブとオ−プンカ−ブとで拡大幅を変更するようにしたものである。なお、直進時には、検知エリアは左右均等に設定される。
【0039】先ず、ブラインドカ−ブの際は、図17に示すように、検知エリアを旋回内側に拡大する一方、この拡大された検知エリアのもっとも旋回内側端(となる走査ビ−ム)がカ−ブの旋回内側縁の接線となるように、検知エリアの拡大幅が設定される。図17では、上記旋回内側縁とこれに対する接線となる走査ビ−ムとの交点をαで示してある。これにより、旋回内側に位置する高い建物等に対する走査ビ−ムの衝突を避けつつ、カ−ブの遠い先まで走査ビ−ムを到達させることができる。
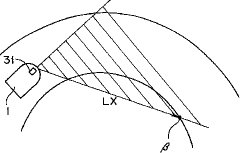
【0040】オ−プンカ−ブの際は、図18に示すように、検知エリアの旋回内側端となる走査ビ−ムの最大到達距離をLXとして示したとき、この最大到達距離LXのところで丁度カ−ブの旋回内側縁と当接する(この当接位置を符号βで示す)ように、検知エリアの旋回内側への拡大幅が設定される。これにより、極力旋回内側の障害物検知を行ないつつ、極力遠い先の障害物検知を行なうことができる。
【0041】以上実施例について説明したが、旋回内側への検知エリアの拡大は、検知エリアそのものを全体的に拡大して得るのは勿論のこと(スキャン角δの増大)、スキャン角δは変更することなく検知方向を旋回内側へオフセットすることにより得るようにしてもよい。
【図面の簡単な説明】
【図1】本発明の第1実施例を示すもので、自動車の前部に塔載された左右一対のレ−ダ装置を示す簡略平面図。
【図2】第1実施例における制御系統を示す図。
【図3】第1実施例における制御内容を示すフロ−チャ−ト。
【図4】第1実施例における制御内容を示すフロ−チャ−ト。
【図5】第1実施例における左右レ−ダ装置の基本的な検知エリア設定例を示す図。
【図6】第1実施例において、車両が停車しているときの検知エリアを示す図。
【図7】第1実施例において、直進時でかつ右側に車線があるときの検知エリアを示す図。
【図8】第1実施例において、直進時でかつ左側に車線があるときの検知エリアを示す図。
【図9】第1実施例において、左旋回時のときの検知エリアを示す図。
【図10】第1実施例において、右旋回時のときの検知エリアを示す図。
【図11】本発明の第2実施例における制御内容を示すフロ−チャ−ト。
【図12】第2実施例におけるブラインドカ−ブのときの検知エリアを示す図。
【図13】第2実施例におけるオ−プンカ−ブのときの検知エリアを示す図。
【図14】本発明の第3実施例を示すもので、レ−ダ装置のセンサヘッドを左右移動式とした場合の正面図。
【図15】図14におけるセンサヘッド部分での縦断面図。
【図16】本発明の第4実施例を示すフロ−チャ−ト。
【図17】ブラインドカ−ブでの好ましい検知エリア拡大幅の設定例を示す図。
【図18】オ−プンカ−ブでの好ましい検知エリア拡大幅の設定例を示す図。
【符号の説明】
1:自動車
2L:左レ−ダ装置
2R:右レ−ダ装置
3:カメラ
4L:左レ−ダ装置用の検知エリア変更アクチュエ−タ
4R:右レ−ダ装置用の検知エリア変更アクチュエ−タ
U:制御ユニット
23A:移動式センサヘッド
24:リニアモ−タ(センサヘッド駆動用)
α:最内側走査ビ−ムとカ−ブ内端縁との接点
β:最内側走査ビ−ムとカ−ブ内端縁との交点
【特許請求の範囲】
【請求項1】車両の進行方向にある障害物を検知するためのレ−ダ装置と、走行路がブラインドカ−ブであるか否かを検出するカ−ブ状態検出手段と、旋回時に、前記カ−ブ状態検出手段によりブラインドカ−ブが検出されていないことを条件として、旋回方向に前記レ−ダ装置の検知エリアを拡大する検知エリア変更手段と、を備えていることを特徴とする車両の障害物検知装置。
【請求項2】それぞれ車両の進行方向にある障害物を検知するための左右一対のレ−ダ装置と、旋回時に、前記左右一対のレ−ダ装置のうち旋回外側にあるレ−ダ装置のみを利用して障害物の検知を行なわせるレ−ダ選択手段と、を備えていることを特徴とする車両の障害物検知装置。
【請求項3】車体左右方向に移動自在に設けられ、車両の進行方向にある障害物を検知するためのレ−ダ装置と、前記レ−ダ装置を車体左右方向に駆動するための駆動手段と、旋回時に、前記駆動手段を制御して前記レ−ダ装置を旋回外側方向へ移動させる位置制御手段と、を備えていることを特徴とする車両の障害物検知装置。
【請求項4】それぞれ車両の進行方向にある障害物を検知するための左右一対のレ−ダ装置と、旋回時に、旋回内側にあるレ−ダ装置の検知エリアを直進時と同様に設定したまま、旋回外側にあるレ−ダ装置の検知エリアを直進時に比して旋回内側へ拡大させる検知エリア変更手段と、を備えていることを特徴とする車両の障害物検知装置。
【請求項5】車両の進行方向にある障害物を検知するためのレ−ダ装置と、走行路がブラインドカ−ブであるか否かを検出するカ−ブ状態検出手段と、旋回時に、前記レ−ダ装置の検知エリアを旋回内側へ拡大させると共に、前記カ−ブ状態検出手段によりブラインドカ−ブが検出されたときはブラインドカ−ブが検出されないときに比して前記検知エリアの拡大幅が小さくなるように設定する検知エリア変更手段と、を備えていることを特徴とする車両の障害物検知装置。
【請求項1】車両の進行方向にある障害物を検知するためのレ−ダ装置と、走行路がブラインドカ−ブであるか否かを検出するカ−ブ状態検出手段と、旋回時に、前記カ−ブ状態検出手段によりブラインドカ−ブが検出されていないことを条件として、旋回方向に前記レ−ダ装置の検知エリアを拡大する検知エリア変更手段と、を備えていることを特徴とする車両の障害物検知装置。
【請求項2】それぞれ車両の進行方向にある障害物を検知するための左右一対のレ−ダ装置と、旋回時に、前記左右一対のレ−ダ装置のうち旋回外側にあるレ−ダ装置のみを利用して障害物の検知を行なわせるレ−ダ選択手段と、を備えていることを特徴とする車両の障害物検知装置。
【請求項3】車体左右方向に移動自在に設けられ、車両の進行方向にある障害物を検知するためのレ−ダ装置と、前記レ−ダ装置を車体左右方向に駆動するための駆動手段と、旋回時に、前記駆動手段を制御して前記レ−ダ装置を旋回外側方向へ移動させる位置制御手段と、を備えていることを特徴とする車両の障害物検知装置。
【請求項4】それぞれ車両の進行方向にある障害物を検知するための左右一対のレ−ダ装置と、旋回時に、旋回内側にあるレ−ダ装置の検知エリアを直進時と同様に設定したまま、旋回外側にあるレ−ダ装置の検知エリアを直進時に比して旋回内側へ拡大させる検知エリア変更手段と、を備えていることを特徴とする車両の障害物検知装置。
【請求項5】車両の進行方向にある障害物を検知するためのレ−ダ装置と、走行路がブラインドカ−ブであるか否かを検出するカ−ブ状態検出手段と、旋回時に、前記レ−ダ装置の検知エリアを旋回内側へ拡大させると共に、前記カ−ブ状態検出手段によりブラインドカ−ブが検出されたときはブラインドカ−ブが検出されないときに比して前記検知エリアの拡大幅が小さくなるように設定する検知エリア変更手段と、を備えていることを特徴とする車両の障害物検知装置。
【図1】


【図2】
【図5】
【図6】
【図7】
【図8】
【図3】
【図4】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図2】
【図5】
【図6】
【図7】
【図8】
【図3】
【図4】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公開番号】特開平6−282799
【公開日】平成6年(1994)10月7日
【国際特許分類】
【出願番号】特願平5−90645
【出願日】平成5年(1993)3月25日
【出願人】(000003137)マツダ株式会社 (6,115)
【公開日】平成6年(1994)10月7日
【国際特許分類】
【出願日】平成5年(1993)3月25日
【出願人】(000003137)マツダ株式会社 (6,115)
[ Back to top ]