
車両の駆動制御装置
【課題】アクセルがオン操作された状態でシフト位置が非駆動位置から駆動位置に切り換えられるときに運転者に違和感を与えることを的確に抑制することのできる車両の駆動制御装置を提供する。
【解決手段】電子制御装置5は、アクセルペダル7がオン操作された状態でシフト位置PSが非駆動位置から駆動位置に切り換えられたとき、車両の実加速度Arが加速度上限値Athを上回らないように内燃機関2から出力される駆動力を制御する駆動力抑制処理を実行する。また、車両の実加速度Arが加速度上限値Athを上回ってから内燃機関2から出力される駆動力の低減を開始するまでに所定の遅れ時間τを設ける。
【解決手段】電子制御装置5は、アクセルペダル7がオン操作された状態でシフト位置PSが非駆動位置から駆動位置に切り換えられたとき、車両の実加速度Arが加速度上限値Athを上回らないように内燃機関2から出力される駆動力を制御する駆動力抑制処理を実行する。また、車両の実加速度Arが加速度上限値Athを上回ってから内燃機関2から出力される駆動力の低減を開始するまでに所定の遅れ時間τを設ける。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の駆動源としての原動機から出力される駆動力をアクセルの操作に応じて制御する車両の駆動制御装置に関する。
【背景技術】
【0002】
特許文献1に示されるように、自動車等の車両は、運転者によるアクセルの操作に応じて原動機から出力される駆動力を制御する制御部を備えており、同原動機から出力される駆動力を車輪に伝達することにより走行する。また、車両には運転者によって駆動位置及び非駆動位置のいずれか一方にシフト位置を選択的に切り換えるためのシフト機構が設けられている。そして、シフト位置が駆動位置にあるときに原動機から車輪に駆動力が伝達される一方、シフト位置が非駆動位置にあるときには原動機から車輪への駆動力の伝達が遮断される。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開昭61―190135号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、停止状態にある車両を発進させようとする際の運転者は、通常、シフト位置を非駆動位置から駆動位置に切り換えてから、オフ状態にあるアクセルをオン状態へと操作する。しかしながら、運転者が急いでいるような場合には、シフト位置を非駆動位置から駆動位置へ切り換える前にアクセルをオン操作してしまう可能性がある。この場合、運転者は上述した通常の操作を行なっているつもりであっても、実際にはアクセルをオン操作した状態でシフト位置を駆動位置へ切り換えるという通常とは異なる操作が行なわれる。
【0005】
上述したように運転者が自覚せずに通常とは異なる操作を行なった場合、運転者が想定している車両の挙動と実際の車両の挙動とが食い違うおそれがある。詳しくは、運転者はアクセルをオン操作したときに車両を発進させるつもりであるのに対し、実際には上記アクセルのオン操作後、シフト位置を駆動位置に切り換えたときに原動機の駆動力が車輪に伝達されて車両が発進する。このように、アクセルがオン操作された状態でシフト位置が駆動位置に切り換えられた後に原動機の駆動力が車輪に伝達されると、運転者に違和感を与えるおそれがある。
【0006】
本発明は、こうした実情に鑑みてなされたものであり、その目的は、アクセルがオン操作された状態でシフト位置が非駆動位置から駆動位置に切り換えられるときに運転者に違和感を与えることを的確に抑制することのできる車両の駆動制御装置を提供することにある。
【課題を解決するための手段】
【0007】
以下、上記課題を解決するための手段及びその作用効果について記載する。
(1)請求項1に記載の発明は、車両の駆動源としての原動機から出力される駆動力をアクセルの操作に応じて制御する制御部と、駆動位置及び非駆動位置のいずれか一方にシフト位置が選択的に切り換え可能なシフト機構とを備え、前記シフト位置が駆動位置にあるときに原動機から車輪に駆動力を伝達する一方、前記シフト位置が非駆動位置にあるときには原動機から車輪への駆動力の伝達を遮断する車両の駆動制御装置において、前記制御部は、アクセルがオン操作された状態で前記シフト位置が非駆動位置から駆動位置に切り換えられたとき、車両の加速度が加速度上限値を上回らないように原動機から出力される駆動力を制御する駆動力抑制処理を実行することをその要旨としている。
【0008】
アクセルがオン操作された状態でシフト位置が非駆動位置から駆動位置に切り換えられるという状況としては、停止状態にある車両を運転者が急いで発進させようとするとき等、運転者が自覚せずにシフト位置の切り換えよりも先にアクセルのオン操作をしてしまう状況が挙げられる。こうした状況のもとでは、アクセルがオン操作された状態でシフト位置が非駆動位置から駆動位置に切り換えられたとき、原動機からの駆動力が車輪に伝達されると、運転者に違和感を与えるおそれがある。
【0009】
この点、上記構成によれば、こうした状況下では上記駆動力抑制処理が実行され、車両の加速度が加速度上限値を上回らないように原動機から出力される駆動力が制御されるようになる。このため、車両の加速度が加速度上限値を上回ることが抑制されるようになる。したがって、アクセルがオン操作された状態でシフト位置が非駆動位置から駆動位置に切り換えられるときに運転者に違和感を与えることを的確に抑制することができるようになる。
【0010】
(2)請求項2に記載の発明は、請求項1に記載の車両の駆動制御装置において、前記制御部は、車両の加速度が加速度上限値を上回ってから前記駆動力の低減を開始するまでに所定の遅れ時間を設けることをその要旨としている。
【0011】
上述した状況下において運転者に違和感を与えることを抑制する上では、駆動力抑制処理において加速度上限値を低く設定することが望ましい。
ところで、アクセルがオン操作された状態でシフト位置が非駆動位置から駆動位置に切り換えられたとき、当該アクセルのオン操作が泥濘路から車両を脱出させるための発進操作である場合がある。この場合、車両を前後に動かす際、特にその進行方向が切り替わるときには内燃機関から出力される駆動力に抗して車輪から機関出力軸に作用する力が大きくなり、これによって内燃機関から出力される駆動力が変動し、一時的に大きく低下することとなる。そのため、上述したように加速度上限値が低く設定されていると、内燃機関から出力される駆動力が不足し、泥濘路からの脱出に時間を要するおそれがある。ちなみに、車両を前後に動かすべく、駆動位置であるドライブ位置とリバース位置との間でシフト位置を切り換える際、シフト位置がドライブ位置とリバース位置との間に位置するニュートラル位置を経由する。したがって、シフト位置がニュートラル位置、すなわち非駆動位置から駆動位置に切り換えられるといった状況が生じる。
【0012】
この点、上記構成によれば、駆動力抑制処理において車両の加速度が加速度上限値を上回った場合に直ぐさま駆動力の低減が開始されるのではなく、所定の遅れ時間が経過した後に駆動力の低減が開始されるようになる。このため、駆動力抑制処理において加速度上限値を低く設定しつつも、泥濘路において車両を前後に動かす際に内燃機関から出力される駆動力が不足することを好適に抑制することができるようになる。
【0013】
(3)請求項3に記載の発明は、請求項2に記載の車両の駆動制御装置において、前記制御部は、アクセルがオン操作された状態で前記シフト位置が非駆動位置から駆動位置に切り換えられたとき、当該シフト位置の切り換えに起因した前記駆動力の変動が収束するまでに要する時間に応じて前記所定の遅れ時間を変更することをその要旨としている。
【0014】
アクセルがオン操作された状態でシフト位置が非駆動位置から駆動位置に切り換えられたとき、例えば当該シフト位置が前進駆動位置に切り換えられた場合と後退駆動位置に切り換えられた場合とでは変速装置の変速比が異なるために、内燃機関から出力される駆動力の変動が収束して安定するまでに要する時間が異なる。
【0015】
同構成によれば、上述した駆動力の変動が収束するまでに要する時間に応じて所定の遅れ時間が設定されるようになる。このため、所定の遅れ時間を適切に設定することができ、内燃機関から出力される駆動力が不足するといった状況の発生を的確に抑制することができるようになる。
【0016】
(4)請求項4に記載の発明は、請求項3に記載の車両の駆動制御装置において、前記シフト位置が後退駆動位置である場合と前進駆動位置である場合とで変速装置の変速比が異なるものとされ、前記制御部は、当該シフト位置に応じて前記所定の遅れ時間を変更することをその要旨としている。
【0017】
例えばシフト位置が後退駆動位置である場合に前進駆動位置である場合に比べて変速装置の変速比が大きくされる車両にあっては、シフト位置が前進駆動位置に切り換えられた場合の方が後退駆動位置に切り換えられた場合に比べて内燃機関から出力される駆動力の変動が収束して安定するまでに要する時間は長くなる。上記構成によれば、当該シフト位置が前進駆動位置に切り換えられた場合には後退駆動位置に切り換えられた場合に比べて所定の遅れ時間が長くされる。このため、当該シフト位置の切り換えに起因して生じる駆動力の変動が収束するまでに要する時間を当該シフト位置に応じて把握することができ、そうして把握した時間に応じて所定の遅れ時間を簡易且つ的確に設定することができるようになる。
【0018】
(5)請求項5に記載の発明は、請求項4に記載の車両の駆動制御装置において、前記シフト位置が後退駆動位置である場合に前進駆動位置である場合に比べて変速装置の変速比が大きくされ、前記制御部は、当該シフト位置が前進駆動位置に切り換えられた場合には後退駆動位置に切り換えられた場合に比べて前記所定の遅れ時間を長くすることをその要旨としている。
【0019】
シフト位置が後退駆動位置である場合に前進駆動位置である場合に比べて変速装置の変速比が大きくされる車両にあっては、請求項5に記載の発明によるように、前記制御部は、当該シフト位置が前進駆動位置に切り換えられた場合には後退駆動位置に切り換えられた場合に比べて前記所定の遅れ時間を長くすればよい。
【0020】
(6)請求項6に記載の発明は、請求項1〜請求項5のいずれか一項に記載の車両の駆動制御装置において、前記制御部は、車両の走行速度が大きいときには小さいときに比べて加速度上限値を小さくすることをその要旨としている。
【0021】
駆動力抑制処理において車両の走行速度にかかわらず加速度上限値を固定値とすると、以下のような不都合が生じるおそれがある。すなわち例えば、加速度上限値が車両の走行速度が小さいときに対応して大きな値に設定されている場合には、車両の走行速度が上昇した場合に車両の加速度が同加速度上限値以下であっても駆動力の低減態様によっては運転者に違和感を与えることとなる。
【0022】
この点、上記構成によれば、車両の走行速度が大きいときには小さいときに比べて加速度上限値が小さくされる。このため、駆動力抑制処理において駆動力を的確に抑制することができる。
【図面の簡単な説明】
【0023】
【図1】本発明の一実施形態に係る車両の駆動制御装置について、車両の概略構成を示す概略図。
【図2】同実施形態における駆動制限ルーチンの実行手順を示すフローチャートであって、その前段部分を示すフローチャート。
【図3】同実施形態における駆動制限ルーチンの実行手順を示すフローチャートであって、その後段部分を示すフローチャート。
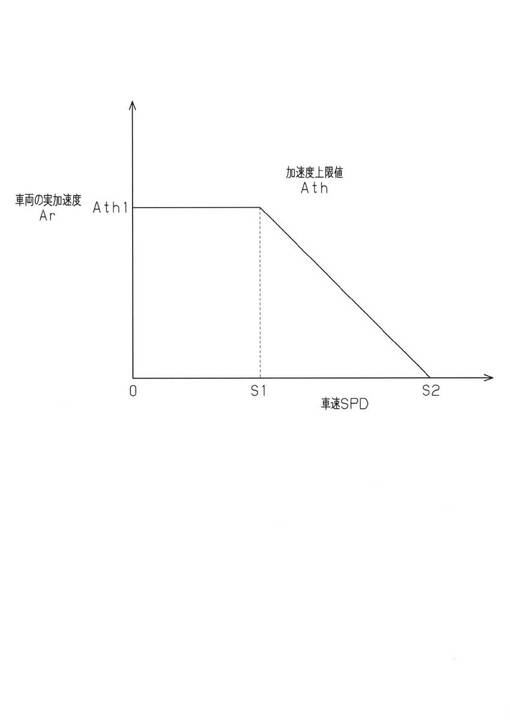
【図4】同実施形態における車速と車両の加速度上限値との関係を示すグラフ。
【発明を実施するための形態】
【0024】
以下、図1〜図4を参照して、本発明に係る車両の駆動制御装置を具体化した一実施形態について説明する。
図1に示すように、車両1には駆動源としての内燃機関2、及び内燃機関2から出力される駆動力を車輪4に伝達する変速装置3が搭載されている。
【0025】
車両1には内燃機関2及び変速装置3に関する各種制御を実行する電子制御装置5が搭載されている。電子制御装置5は、各種制御に係る演算処理を実施する中央演算処理装置(CPU)、各種制御用のプログラムやデータが記憶された読み出し専用メモリ(ROM)、演算処理の結果等を一時的に記憶するランダムアクセスメモリ(RAM)等を備えて構成されている。そして、電子制御装置5は、各種センサの検出信号を読み込み、各種演算処理を実行し、その結果に基づいて内燃機関2及び変速装置3を統括的に制御する。
【0026】
各種センサとしては、車両1の走行速度(以下、車速SPD)を検出する車速センサ6、アクセルペダル7の踏み込み量(以下、アクセル操作量ACCP)を検出するアクセル操作量センサ8、シフトレバー9の操作位置(以下、シフト位置PS)を検出するシフト位置センサ10等が設けられている。
【0027】
電子制御装置5は、アクセル操作量ACCPに応じて内燃機関2から出力される駆動力を調整する。また、電子制御装置5は、アクセル操作量ACCP、車速SPD、及びシフト位置PSに基づき変速装置3の変速段の切り換えや、内燃機関2と車輪4との間の駆動力の伝達及び遮断を行なう。ちなみに、上記シフトレバー9は、パーキング位置、リバース位置、ニュートラル位置、及びドライブ位置等の複数の操作位置のうちのいずれかに切り換え可能とされている。
【0028】
以下、シフトレバー9の各操作位置における変速装置3の駆動態様について説明する。 シフトレバー9がパーキング位置に切り換えられると、変速装置3におけるギヤの噛み合いにより車輪4の回転が禁止されるとともに、内燃機関2から出力される駆動力の車輪4への伝達が遮断されるように変速装置3が駆動される。
【0029】
シフトレバー9がニュートラル位置に切り換えられると、上述した変速装置3におけるギヤの噛み合いによる車輪4の回転禁止が解除されるとともに、内燃機関2から出力される駆動力の車輪4への伝達が遮断されるように変速装置3が駆動される。
【0030】
シフトレバー9がドライブ位置に切り換えられると、内燃機関2から出力される駆動力が車輪4に対して正回転方向に伝達されるように変速装置3が駆動される。これにより、車両1は前進走行可能な状態になる。
【0031】
シフトレバー9がリバース位置に切り換えられると、内燃機関2から出力される駆動力が車輪4に対して逆回転方向に伝達されるように変速装置3が駆動される。これにより、車両1は後退走行可能な状態になる。ちなみに、本実施形態ではシフト位置PSがリバース位置である場合にはドライブ位置である場合に比べて変速装置3の変速比が大きくされている。
【0032】
すなわち、パーキング位置及びニュートラル位置が非駆動位置に相当し、ドライブ位置及びリバース位置が駆動位置に相当する。また、ドライブ位置が前進駆動位置に相当し、リバース位置が後退駆動位置に相当する。
【0033】
さて前述したように、停止状態にある車両1を発進させようとする際の運転者は、通常、シフト位置PSを非駆動位置から駆動位置に切り換えてから、アクセルペダル7を踏み込む。すなわち、オフ状態にあるアクセルペダル7をオン状態へと操作する。しかしながら、運転者が急いでいるような場合には、シフト位置PSを非駆動位置から駆動位置へ切り換える前にアクセルペダル7をオン操作してしまう可能性がある。この場合、運転者は上述した通常の操作を行なっているつもりであっても、実際にはアクセルペダル7をオン操作した状態でシフト位置PSを駆動位置へ切り換えるという通常とは異なる操作が行なわれる。
【0034】
上述したように運転者が自覚せずに通常とは異なる操作を行なった場合、運転者が想定している車両1の挙動と実際の車両1の挙動とが食い違うおそれがある。詳しくは、運転者はアクセルペダル7をオン操作したときに車両1を発進させるつもりであるのに対し、実際には上記アクセルペダル7のオン操作後、シフト位置PSを駆動位置に切り換えたときに内燃機関2の駆動力が車輪4に伝達されて車両1が発進する。このように、アクセルペダル7がオン操作された状態でシフト位置PSが駆動位置に切り換えられた後に内燃機関2の駆動力が車輪4に伝達されると、運転者に違和感を与えるおそれがある。
【0035】
そこで、本実施形態では、こうした不都合の発生を抑制すべく、電子制御装置5を通じて、アクセルペダル7がオン操作された状態でシフト位置PSが非駆動位置から駆動位置に切り換えられたとき、車両の実加速度Arが加速度上限値Athを上回らないように内燃機関2から出力される駆動力を制御する駆動力抑制処理を実行するようにしている。
【0036】
ここで、上述した状況下において運転者に違和感を与えることを抑制する上では、駆動力抑制処理において加速度上限値Athを低く設定することが望ましい。
ところで、アクセルペダル7がオン操作された状態でシフト位置PSが非駆動位置から駆動位置に切り換えられたとき、当該アクセルペダル7のオン操作が泥濘路から車両1を脱出させるための発進操作である場合がある。この場合、車両1を前後に動かす際、特にその進行方向が切り替わるときには内燃機関2から出力される駆動力に抗して車輪4から機関出力軸に作用する力が大きくなり、これによって内燃機関2から出力される駆動力が変動し、一時的に大きく低下することとなる。そのため、上述したように加速度上限値Athが低く設定されていると、内燃機関2から出力される駆動力が不足し、泥濘路からの脱出に時間を要するおそれがある。ちなみに、車両1を前後に動かすべく、駆動位置であるドライブ位置とリバース位置との間でシフト位置PSを切り換える際、シフト位置PSがドライブ位置とリバース位置との間に位置するニュートラル位置を経由する。したがって、シフト位置PSがニュートラル位置、すなわち非駆動位置から駆動位置に切り換えられるといった状況が生じる。
【0037】
そこで、本実施形態では、車両の実加速度Arが加速度上限値Athを上回ってから内燃機関2から出力される駆動力の低減を開始するまでに所定の遅れ時間τを設けるようにしている。また、アクセルペダル7がオン操作された状態でシフト位置PSが非駆動位置から駆動位置に切り換えられたとき、当該シフト位置PSの切り換えに起因した駆動力の変動が収束するまでに要する時間に応じて所定の遅れ時間τを変更するようにしている。具体的には当該シフト位置PSがドライブ位置に切り換えられた場合にはリバース位置に切り換えられた場合に比べて所定の遅れ時間τを長くしている。
【0038】
また、駆動力抑制処理において車速SPDにかかわらず加速度上限値を固定値とすると、以下のような不都合が生じるおそれがある。すなわち例えば、加速度上限値が車速SPDが小さいときに対応して大きな値に設定されている場合には、車速SPDが上昇した場合に車両の実加速度Arが同加速度上限値Ath以下であっても駆動力の低減態様によっては運転者に違和感を与えることとなる。
【0039】
そこで、本実施形態では、駆動力抑制処理において駆動力の抑制が不十分となることを的確に抑制すべく、車速SPDが大きいときには小さいときに比べて加速度上限値Athを小さくしている。
【0040】
次に、本実施形態の作用について説明する。
アクセルペダル7がオン操作された状態でシフト位置PSが非駆動位置から駆動位置に切り換えられたときには、上記駆動力抑制処理が実行されることにより、車両の実加速度Arが加速度上限値Athを上回らないように内燃機関2から出力される駆動力が制御されるようになる。このため、車両の実加速度Arが加速度上限値Athを上回ることが抑制されるようになる。
【0041】
また、駆動力抑制処理において車両の実加速度Arが加速度上限値Athを上回った場合に直ぐさま駆動力の低減が開始されるのではなく、所定の遅れ時間τが経過した後に駆動力の低減が開始されるようになる。
【0042】
また、アクセルペダル7がオン操作された状態でシフト位置PSが非駆動位置から駆動位置に切り換えられたとき、当該シフト位置PSの切り換えに起因した駆動力の変動が収束するまでに要する時間に応じて所定の遅れ時間τが変更される。具体的には当該シフト位置PSがドライブ位置に切り換えられた場合にはリバース位置に切り換えられた場合に比べて所定の遅れ時間τが長くされる。
【0043】
ここで、このように所定の遅れ時間τをシフト位置PSに応じて可変設定している理由について説明する。
アクセルペダル7がオン操作された状態でシフト位置PSが非駆動位置から駆動位置に切り換えられたとき、例えば当該シフト位置がドライブ位置に切り換えられた場合とリバース位置に切り換えられた場合とでは変速装置3の変速比が異なるために、内燃機関2から出力される駆動力の変動が収束して安定するまでに要する時間が異なる。前述したように、本実施形態ではシフト位置PSがリバース位置である場合にはドライブ位置である場合に比べて変速装置3の変速比が大きくされている。そのため、シフト位置PSがドライブ位置に切り換えられた場合の方がリバース位置に切り換えられた場合に比べて内燃機関2から出力される駆動力の変動が収束して安定するまでに要する時間は長くなる。したがって本実施形態では、このようにシフト位置PSに応じて駆動力の変動が収束するまでに要する時間が異なることに着目することで所定の遅れ時間τをシフト位置PSに応じて可変設定している。
【0044】
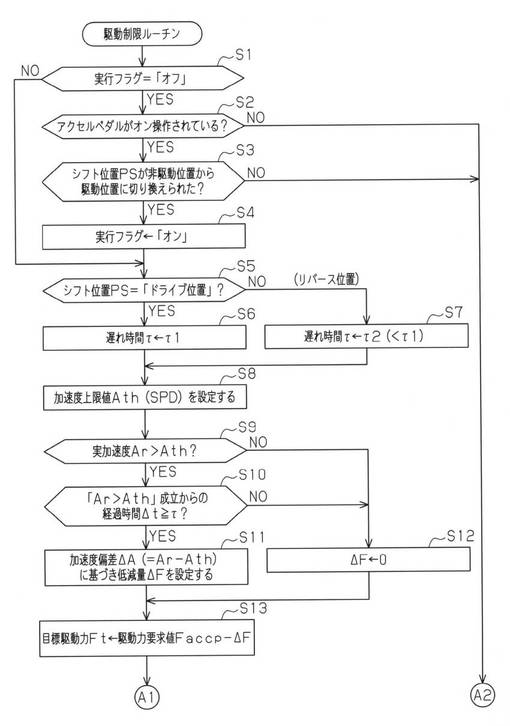
次に、図2及び図3のフローチャートを参照して、駆動力抑制処理を含む駆動制限ルーチンの実行手順について詳細に説明する。尚、このフローチャートに示される一連の処理は電子制御装置5を通じて所定時間毎の時間割り込みにて周期的に実行される。
【0045】
図2に示すように、この一連の処理ではまず、実行フラグがオフであるか否かを判断する(ステップS1)。この実行フラグは、駆動力抑制処理が実行されているときにはオンにされる一方、駆動力抑制処理の実行が停止されているときにはオフとされる。このため、実行フラグは最初の制御周期においてはオフにされている。
【0046】
ここで、実行フラグがオフである場合(ステップS1:「YES」)には、このとき駆動力抑制処理が実行されていないとして、次に、駆動力抑制処理の実行を開始すべき状況であるか否かを判断する。すなわち、まずはアクセルペダル7がオン操作されているか否かを判断する(ステップS2)。ここで、アクセルペダル7がオン操作されていない場合(ステップS2:「NO」)には、駆動力抑制処理の実行を開始すべき状況ではないとして、この一連の処理を一旦終了する(図2及び図3にそれぞれ示すA2参照)。
【0047】
一方、アクセルペダル7がオン操作されている場合(ステップS2:「YES」)には、次に、シフト位置PSが非駆動位置(パーキング位置又はニュートラル位置)から駆動位置(ドライブ位置又はリバース位置)に切り換えられたか否かを判断する(ステップS3)。ここで、シフト位置PSが非駆動位置から駆動位置に切り換えられていない場合(ステップS3:「NO」)には、駆動力抑制処理の実行を開始すべき状況ではないとして、この一連の処理を一旦終了する(図2及び図3にそれぞれ示すA2参照)。
【0048】
一方、シフト位置PSが非駆動位置から駆動位置に切り換えられた場合(ステップS3:「YES」)、すなわちアクセルペダル7がオン操作された状態でシフト位置PSが非駆動位置から駆動位置に切り換えられたとき、には、次に、駆動力抑制処理を実行すべく、実行フラグをオンにする(ステップS4)。そして、次に、切り換えられたシフト位置PSがドライブ位置であるか否かを判断する(ステップS5)。ここで、シフト位置PSがドライブ位置である場合(ステップS5:「YES」)には、次に、所定の遅れ時間τを第1の所定時間τ1に設定する(ステップS6)。また、シフト位置PSがドライブ位置ではない場合(ステップS5:「NO」)、すなわちリバース位置である場合には、次に、所定の遅れ時間τを第1の所定時間よりも短い第2の所定時間τ2(<τ1)に設定する(ステップS7)。本実施形態では、第1の所定時間τ1を例えば400ミリ秒に設定し、第2の所定時間τ2を300ミリ秒に設定している。これら遅れ時間τは、泥濘路において車両1を前後に動かす際に内燃機関2から出力される駆動力が不足することが抑制されるように実験等を通じて予め設定されている。
【0049】
こうして所定の遅れ時間τを設定すると、次に、そのときの車速SPDに基づき加速度上限値Athを設定する。すなわち、図4に示すように、車速SPDが「0」から第1所定速度S1までは加速度上限値Athは第1上限値Ath1(一定)とされ、車速SPDが第1所定速度S1から第2所定速度S2までの範囲においては車速SPDが大きくなるときほど加速度上限値Athは小さくされる。また、車速SPDが第2所定速度S2以上においては加速度上限値Athは「0」とされる。こうした車速SPDと加速度上限値Athとの関係は、内燃機関2から出力される駆動力が泥濘路から脱出可能な値とされつつ低減されるように実験等を通じて予め設定されている。
【0050】
こうして加速度上限値Athを設定すると、次に、そのときの実加速度Arが加速度上限値Athを上回っているか否かを判断する(ステップS9)。ちなみに、車両の実加速度Arは車速SPDの検出結果に基づき算出される。ここで、実加速度Arが加速度上限値Ath以下である場合には(ステップS:「NO」)、低減量ΔFを「0」に設定し(ステップS12)、次にステップS13に進む。この低減量ΔFは、実加速度Arが上記加速度上限値Athを上回っている場合において実加速度Arが同加速度上限値Athとなるように内燃機関2から出力される駆動力の制御目標値である駆動力目標値Ftを減じるための補正量である。
【0051】
一方、実加速度Arが加速度上限値Athを上回っている場合(ステップS9:「YES」)には、次に、実加速度Arが加速度上限値Athを上回ってからの経過時間Δtが先に設定した所定の遅れ時間τ以上であるか否かを判断する(ステップS10)。ここで、経過時間Δtが所定の遅れ時間τ未満である場合(ステップS10:「NO」)には、ステップS12に進み、低減量ΔFを「0」に設定し、次に、ステップS13に進む。
【0052】
一方、経過時間Δtが所定の遅れ時間τ以上である場合(ステップS10:「YES」)には、次に、そのときの実加速度Arと加速度上限値Athとの偏差(以下、加速度偏差ΔA)に基づき低減量ΔFを設定する。すなわち、実加速度Arが上記加速度上限値Athを上回っている場合において加速度偏差ΔAが大きいときほど上記低減量ΔFには大きな値が設定される。
【0053】
こうして低減量ΔFを設定すると(ステップS11,S12)、次に、式(1)に従って駆動力目標値Ftを設定する(ステップS13)。
Ft ← Faccp − ΔF ・・・(1)
すなわち、アクセル操作量ACCPに基づき設定される駆動力要求値Faccpから低減量ΔFを減じた値を駆動力目標値Ftに設定する。そして、この駆動力目標値Ftに基づき内燃機関2を制御する。
【0054】
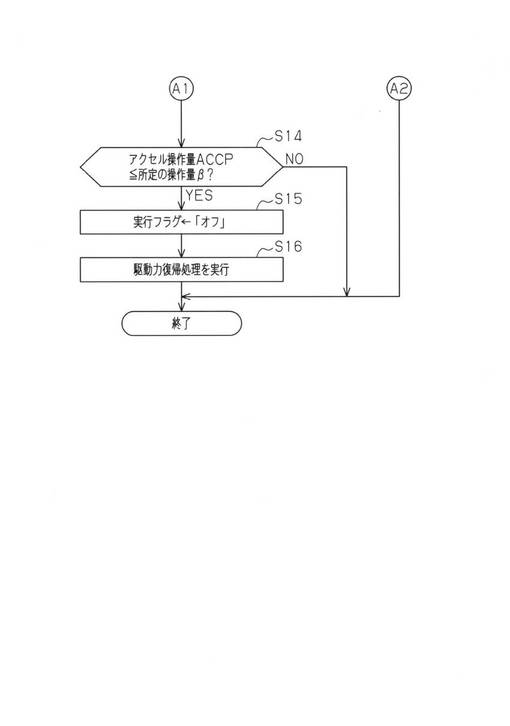
こうして駆動力抑制処理を実行すると、次に、図3に示すように、駆動力復帰処理の実行を開始すべき状況であるか否かを判断する。駆動力復帰処理は内燃機関2から出力される駆動力を復帰させるための処理である。具体的には、アクセル操作量ACCPが低減されて所定の操作量β以下となっているか否かを判断する(ステップS14)。ちなみに、本実施形態では所定の操作量βがアイドル相当のアクセル操作量ACCPとされている。
【0055】
ここで、アクセル操作量ACCPが所定の操作量β以下ではない場合(ステップS14:「NO」)には、駆動力抑制処理の実行を継続すべきであり、駆動力復帰処理の実行を開始すべき状況ではないとして、この一連の処理を一旦終了する。
【0056】
一方、アクセル操作量ACCPが所定の操作量β以下である場合(ステップS14:「YES」)には、次に、駆動力抑制処理の実行を停止すべく、実行フラグをオフにする(ステップS15)。そして、次に、駆動力復帰処理を実行して、この一連の処理を一旦終了する。
【0057】
駆動力復帰処理では、駆動力目標値Ftが先の式(1)により設定された値から、次の式(2)により設定される値へと徐変されるようになる。
Ft ← Faccp ・・・(2)
すなわち、駆動力目標値Ftを、アクセル操作量ACCPに基づき設定される駆動力要求値Faccpへと徐変させるとともに、この駆動力目標値Ftに基づき内燃機関2を制御する。
【0058】
尚、電子制御装置5が本発明に係る制御部に相当し、シフトレバー9が本発明に係るシフト機構に相当する。
以上説明した本実施形態に係る車両の駆動制御装置によれば、以下に示す作用効果が得られるようになる。
【0059】
(1)電子制御装置5は、アクセルペダル7がオン操作された状態でシフト位置PSが非駆動位置から駆動位置に切り換えられたとき、車両の実加速度Arが加速度上限値Athを上回らないように内燃機関2から出力される駆動力を制御する駆動力抑制処理を実行するようにした。こうした構成によれば、アクセルペダル7がオン操作された状態でシフト位置PSが非駆動位置から駆動位置に切り換えられるときに運転者に違和感を与えることを的確に抑制することができるようになる。
【0060】
(2)車両の実加速度Arが加速度上限値Athを上回ってから内燃機関2から出力される駆動力の低減を開始するまでに所定の遅れ時間τを設けるようにした。したがって、駆動力抑制処理において加速度上限値Athを低く設定しつつも、泥濘路において車両1を前後に動かす際に内燃機関2から出力される駆動力が不足することを好適に抑制することができるようになる。
【0061】
(3)シフト位置PSがリバース位置である場合にドライブ位置である場合に比べて変速装置3の変速比が大きくされるものとした。また、当該シフト位置PSがドライブ位置に切り換えられた場合にはリバース位置に切り換えられた場合に比べて所定の遅れ時間τを長くするようにした。こうした構成によれば、所定の遅れ時間τを適切に設定することができ、内燃機関2から出力される駆動力が不足するといった状況の発生を的確に抑制することができるようになる。また、当該シフト位置PSの切り換えに起因して生じる駆動力の変動が収束するまでに要する時間を当該シフト位置PSに応じて把握することができ、そうして把握した時間に応じて所定の遅れ時間τを簡易且つ的確に設定することができるようになる。
【0062】
(4)電子制御装置5は、車速SPDが大きいときには小さいときに比べて加速度上限値Athを小さくするようにした。こうした構成によれば、駆動力抑制処理において駆動力を的確に抑制することができる。
【0063】
尚、本発明に係る車両の駆動制御装置は、上記実施形態にて例示した構成に限定されるものではなく、これを適宜変更した例えば次のような形態として実施することもできる。
・上記実施形態では車両1の駆動源としての原動機の一例として内燃機関2について例示した。しかしながら、本発明に係る原動機はこれに限られるものではなく、内燃機関及び電動モータの双方からなる原動機であってもよいし、電動モータのみからなる原動機であってもよい。
【0064】
・上記実施形態では、アクセルの一例としてアクセルペダル7について例示したが、アクセルはこのように運転者の足先により操作されるものに限られるものではない。他に例えば運転者の手により操作されるアクセルレバーを採用することもできる。
【0065】
・車速SPDと加速度上限値Athとの関係は上記実施形態において例示したものに限られず、これを適宜変更することができる。また、上記実施形態において例示したように、車速SPDが大きいときには小さいときに比べて加速度上限値Athを小さく設定するようにすることが、内燃機関2から出力される駆動力Fを適切に制限する上では望ましい。しかしながら、本発明はこのように加速度上限値Athが車速SPDに応じて可変設定されるものに限られるものではなく、車速SPDにかかわらず加速度上限値を固定値とすることもできる。
【0066】
・上記実施形態では、シフト位置PSがリバース位置である場合はドライブ位置である場合に比べて変速装置3の変速比が大きくされる車両1について例示した。しかしながら、シフト位置PSがリバース位置である場合はドライブ位置である場合に比べて変速装置の変速比が小さくされる車両に対して本発明を適用することもできる。この場合、シフト位置PSが非駆動位置からドライブ位置に切り換えられた場合にリバース位置に切り換えられた場合に比べて所定の遅れ時間τを短くすればよい。
【0067】
・上記実施形態及びその変形例では、ドライブ位置とリバース位置とで変速装置の変速比が異なる車両について例示した。しかしながら、ドライブ位置とリバース位置とで変速装置の変速比が同一とされる車両にあっては、上記所定の遅れ時間τを同一の値に設定すればよい。
【0068】
・本発明は、前進駆動位置における変速比と後退駆動位置における変速比との関係に基づき所定の遅れ時間τを設定するものに限られない。他に例えば、こうした変速比にかかわらず所定の遅れ時間を固定値とすることもできる。この場合、車両の駆動制御装置における制御構成を簡易なものとすることができる。
【0069】
・上記実施形態のように、駆動力の低減を開始するまでに所定の遅れ時間τを設けるようにすることが、駆動力抑制処理において加速度上限値Athを低く設定しつつも、泥濘路において車両1を前後に動かす際に内燃機関2から出力される駆動力が不足することを好適に抑制する上では望ましい。しかしながら、駆動力抑制処理における加速度上限値がある程度高く設定されるものにあってはこのような所定の遅れ時間を設けないものとすることもできる。要するに、アクセルがオン操作された状態でシフト位置が非駆動位置から駆動位置に切り換えられたとき、車両の加速度が加速度上限値を上回らないように原動機から出力される駆動力を制御する駆動力抑制処理を実行するものであればよい。
【符号の説明】
【0070】
1…車両、2…内燃機関、3…変速装置、4…車輪、5…電子制御装置、6…車速センサ、7…アクセルペダル、8…アクセル操作量センサ、9…シフトレバー、10…シフト位置センサ。
【技術分野】
【0001】
本発明は、車両の駆動源としての原動機から出力される駆動力をアクセルの操作に応じて制御する車両の駆動制御装置に関する。
【背景技術】
【0002】
特許文献1に示されるように、自動車等の車両は、運転者によるアクセルの操作に応じて原動機から出力される駆動力を制御する制御部を備えており、同原動機から出力される駆動力を車輪に伝達することにより走行する。また、車両には運転者によって駆動位置及び非駆動位置のいずれか一方にシフト位置を選択的に切り換えるためのシフト機構が設けられている。そして、シフト位置が駆動位置にあるときに原動機から車輪に駆動力が伝達される一方、シフト位置が非駆動位置にあるときには原動機から車輪への駆動力の伝達が遮断される。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開昭61―190135号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、停止状態にある車両を発進させようとする際の運転者は、通常、シフト位置を非駆動位置から駆動位置に切り換えてから、オフ状態にあるアクセルをオン状態へと操作する。しかしながら、運転者が急いでいるような場合には、シフト位置を非駆動位置から駆動位置へ切り換える前にアクセルをオン操作してしまう可能性がある。この場合、運転者は上述した通常の操作を行なっているつもりであっても、実際にはアクセルをオン操作した状態でシフト位置を駆動位置へ切り換えるという通常とは異なる操作が行なわれる。
【0005】
上述したように運転者が自覚せずに通常とは異なる操作を行なった場合、運転者が想定している車両の挙動と実際の車両の挙動とが食い違うおそれがある。詳しくは、運転者はアクセルをオン操作したときに車両を発進させるつもりであるのに対し、実際には上記アクセルのオン操作後、シフト位置を駆動位置に切り換えたときに原動機の駆動力が車輪に伝達されて車両が発進する。このように、アクセルがオン操作された状態でシフト位置が駆動位置に切り換えられた後に原動機の駆動力が車輪に伝達されると、運転者に違和感を与えるおそれがある。
【0006】
本発明は、こうした実情に鑑みてなされたものであり、その目的は、アクセルがオン操作された状態でシフト位置が非駆動位置から駆動位置に切り換えられるときに運転者に違和感を与えることを的確に抑制することのできる車両の駆動制御装置を提供することにある。
【課題を解決するための手段】
【0007】
以下、上記課題を解決するための手段及びその作用効果について記載する。
(1)請求項1に記載の発明は、車両の駆動源としての原動機から出力される駆動力をアクセルの操作に応じて制御する制御部と、駆動位置及び非駆動位置のいずれか一方にシフト位置が選択的に切り換え可能なシフト機構とを備え、前記シフト位置が駆動位置にあるときに原動機から車輪に駆動力を伝達する一方、前記シフト位置が非駆動位置にあるときには原動機から車輪への駆動力の伝達を遮断する車両の駆動制御装置において、前記制御部は、アクセルがオン操作された状態で前記シフト位置が非駆動位置から駆動位置に切り換えられたとき、車両の加速度が加速度上限値を上回らないように原動機から出力される駆動力を制御する駆動力抑制処理を実行することをその要旨としている。
【0008】
アクセルがオン操作された状態でシフト位置が非駆動位置から駆動位置に切り換えられるという状況としては、停止状態にある車両を運転者が急いで発進させようとするとき等、運転者が自覚せずにシフト位置の切り換えよりも先にアクセルのオン操作をしてしまう状況が挙げられる。こうした状況のもとでは、アクセルがオン操作された状態でシフト位置が非駆動位置から駆動位置に切り換えられたとき、原動機からの駆動力が車輪に伝達されると、運転者に違和感を与えるおそれがある。
【0009】
この点、上記構成によれば、こうした状況下では上記駆動力抑制処理が実行され、車両の加速度が加速度上限値を上回らないように原動機から出力される駆動力が制御されるようになる。このため、車両の加速度が加速度上限値を上回ることが抑制されるようになる。したがって、アクセルがオン操作された状態でシフト位置が非駆動位置から駆動位置に切り換えられるときに運転者に違和感を与えることを的確に抑制することができるようになる。
【0010】
(2)請求項2に記載の発明は、請求項1に記載の車両の駆動制御装置において、前記制御部は、車両の加速度が加速度上限値を上回ってから前記駆動力の低減を開始するまでに所定の遅れ時間を設けることをその要旨としている。
【0011】
上述した状況下において運転者に違和感を与えることを抑制する上では、駆動力抑制処理において加速度上限値を低く設定することが望ましい。
ところで、アクセルがオン操作された状態でシフト位置が非駆動位置から駆動位置に切り換えられたとき、当該アクセルのオン操作が泥濘路から車両を脱出させるための発進操作である場合がある。この場合、車両を前後に動かす際、特にその進行方向が切り替わるときには内燃機関から出力される駆動力に抗して車輪から機関出力軸に作用する力が大きくなり、これによって内燃機関から出力される駆動力が変動し、一時的に大きく低下することとなる。そのため、上述したように加速度上限値が低く設定されていると、内燃機関から出力される駆動力が不足し、泥濘路からの脱出に時間を要するおそれがある。ちなみに、車両を前後に動かすべく、駆動位置であるドライブ位置とリバース位置との間でシフト位置を切り換える際、シフト位置がドライブ位置とリバース位置との間に位置するニュートラル位置を経由する。したがって、シフト位置がニュートラル位置、すなわち非駆動位置から駆動位置に切り換えられるといった状況が生じる。
【0012】
この点、上記構成によれば、駆動力抑制処理において車両の加速度が加速度上限値を上回った場合に直ぐさま駆動力の低減が開始されるのではなく、所定の遅れ時間が経過した後に駆動力の低減が開始されるようになる。このため、駆動力抑制処理において加速度上限値を低く設定しつつも、泥濘路において車両を前後に動かす際に内燃機関から出力される駆動力が不足することを好適に抑制することができるようになる。
【0013】
(3)請求項3に記載の発明は、請求項2に記載の車両の駆動制御装置において、前記制御部は、アクセルがオン操作された状態で前記シフト位置が非駆動位置から駆動位置に切り換えられたとき、当該シフト位置の切り換えに起因した前記駆動力の変動が収束するまでに要する時間に応じて前記所定の遅れ時間を変更することをその要旨としている。
【0014】
アクセルがオン操作された状態でシフト位置が非駆動位置から駆動位置に切り換えられたとき、例えば当該シフト位置が前進駆動位置に切り換えられた場合と後退駆動位置に切り換えられた場合とでは変速装置の変速比が異なるために、内燃機関から出力される駆動力の変動が収束して安定するまでに要する時間が異なる。
【0015】
同構成によれば、上述した駆動力の変動が収束するまでに要する時間に応じて所定の遅れ時間が設定されるようになる。このため、所定の遅れ時間を適切に設定することができ、内燃機関から出力される駆動力が不足するといった状況の発生を的確に抑制することができるようになる。
【0016】
(4)請求項4に記載の発明は、請求項3に記載の車両の駆動制御装置において、前記シフト位置が後退駆動位置である場合と前進駆動位置である場合とで変速装置の変速比が異なるものとされ、前記制御部は、当該シフト位置に応じて前記所定の遅れ時間を変更することをその要旨としている。
【0017】
例えばシフト位置が後退駆動位置である場合に前進駆動位置である場合に比べて変速装置の変速比が大きくされる車両にあっては、シフト位置が前進駆動位置に切り換えられた場合の方が後退駆動位置に切り換えられた場合に比べて内燃機関から出力される駆動力の変動が収束して安定するまでに要する時間は長くなる。上記構成によれば、当該シフト位置が前進駆動位置に切り換えられた場合には後退駆動位置に切り換えられた場合に比べて所定の遅れ時間が長くされる。このため、当該シフト位置の切り換えに起因して生じる駆動力の変動が収束するまでに要する時間を当該シフト位置に応じて把握することができ、そうして把握した時間に応じて所定の遅れ時間を簡易且つ的確に設定することができるようになる。
【0018】
(5)請求項5に記載の発明は、請求項4に記載の車両の駆動制御装置において、前記シフト位置が後退駆動位置である場合に前進駆動位置である場合に比べて変速装置の変速比が大きくされ、前記制御部は、当該シフト位置が前進駆動位置に切り換えられた場合には後退駆動位置に切り換えられた場合に比べて前記所定の遅れ時間を長くすることをその要旨としている。
【0019】
シフト位置が後退駆動位置である場合に前進駆動位置である場合に比べて変速装置の変速比が大きくされる車両にあっては、請求項5に記載の発明によるように、前記制御部は、当該シフト位置が前進駆動位置に切り換えられた場合には後退駆動位置に切り換えられた場合に比べて前記所定の遅れ時間を長くすればよい。
【0020】
(6)請求項6に記載の発明は、請求項1〜請求項5のいずれか一項に記載の車両の駆動制御装置において、前記制御部は、車両の走行速度が大きいときには小さいときに比べて加速度上限値を小さくすることをその要旨としている。
【0021】
駆動力抑制処理において車両の走行速度にかかわらず加速度上限値を固定値とすると、以下のような不都合が生じるおそれがある。すなわち例えば、加速度上限値が車両の走行速度が小さいときに対応して大きな値に設定されている場合には、車両の走行速度が上昇した場合に車両の加速度が同加速度上限値以下であっても駆動力の低減態様によっては運転者に違和感を与えることとなる。
【0022】
この点、上記構成によれば、車両の走行速度が大きいときには小さいときに比べて加速度上限値が小さくされる。このため、駆動力抑制処理において駆動力を的確に抑制することができる。
【図面の簡単な説明】
【0023】
【図1】本発明の一実施形態に係る車両の駆動制御装置について、車両の概略構成を示す概略図。
【図2】同実施形態における駆動制限ルーチンの実行手順を示すフローチャートであって、その前段部分を示すフローチャート。
【図3】同実施形態における駆動制限ルーチンの実行手順を示すフローチャートであって、その後段部分を示すフローチャート。
【図4】同実施形態における車速と車両の加速度上限値との関係を示すグラフ。
【発明を実施するための形態】
【0024】
以下、図1〜図4を参照して、本発明に係る車両の駆動制御装置を具体化した一実施形態について説明する。
図1に示すように、車両1には駆動源としての内燃機関2、及び内燃機関2から出力される駆動力を車輪4に伝達する変速装置3が搭載されている。
【0025】
車両1には内燃機関2及び変速装置3に関する各種制御を実行する電子制御装置5が搭載されている。電子制御装置5は、各種制御に係る演算処理を実施する中央演算処理装置(CPU)、各種制御用のプログラムやデータが記憶された読み出し専用メモリ(ROM)、演算処理の結果等を一時的に記憶するランダムアクセスメモリ(RAM)等を備えて構成されている。そして、電子制御装置5は、各種センサの検出信号を読み込み、各種演算処理を実行し、その結果に基づいて内燃機関2及び変速装置3を統括的に制御する。
【0026】
各種センサとしては、車両1の走行速度(以下、車速SPD)を検出する車速センサ6、アクセルペダル7の踏み込み量(以下、アクセル操作量ACCP)を検出するアクセル操作量センサ8、シフトレバー9の操作位置(以下、シフト位置PS)を検出するシフト位置センサ10等が設けられている。
【0027】
電子制御装置5は、アクセル操作量ACCPに応じて内燃機関2から出力される駆動力を調整する。また、電子制御装置5は、アクセル操作量ACCP、車速SPD、及びシフト位置PSに基づき変速装置3の変速段の切り換えや、内燃機関2と車輪4との間の駆動力の伝達及び遮断を行なう。ちなみに、上記シフトレバー9は、パーキング位置、リバース位置、ニュートラル位置、及びドライブ位置等の複数の操作位置のうちのいずれかに切り換え可能とされている。
【0028】
以下、シフトレバー9の各操作位置における変速装置3の駆動態様について説明する。 シフトレバー9がパーキング位置に切り換えられると、変速装置3におけるギヤの噛み合いにより車輪4の回転が禁止されるとともに、内燃機関2から出力される駆動力の車輪4への伝達が遮断されるように変速装置3が駆動される。
【0029】
シフトレバー9がニュートラル位置に切り換えられると、上述した変速装置3におけるギヤの噛み合いによる車輪4の回転禁止が解除されるとともに、内燃機関2から出力される駆動力の車輪4への伝達が遮断されるように変速装置3が駆動される。
【0030】
シフトレバー9がドライブ位置に切り換えられると、内燃機関2から出力される駆動力が車輪4に対して正回転方向に伝達されるように変速装置3が駆動される。これにより、車両1は前進走行可能な状態になる。
【0031】
シフトレバー9がリバース位置に切り換えられると、内燃機関2から出力される駆動力が車輪4に対して逆回転方向に伝達されるように変速装置3が駆動される。これにより、車両1は後退走行可能な状態になる。ちなみに、本実施形態ではシフト位置PSがリバース位置である場合にはドライブ位置である場合に比べて変速装置3の変速比が大きくされている。
【0032】
すなわち、パーキング位置及びニュートラル位置が非駆動位置に相当し、ドライブ位置及びリバース位置が駆動位置に相当する。また、ドライブ位置が前進駆動位置に相当し、リバース位置が後退駆動位置に相当する。
【0033】
さて前述したように、停止状態にある車両1を発進させようとする際の運転者は、通常、シフト位置PSを非駆動位置から駆動位置に切り換えてから、アクセルペダル7を踏み込む。すなわち、オフ状態にあるアクセルペダル7をオン状態へと操作する。しかしながら、運転者が急いでいるような場合には、シフト位置PSを非駆動位置から駆動位置へ切り換える前にアクセルペダル7をオン操作してしまう可能性がある。この場合、運転者は上述した通常の操作を行なっているつもりであっても、実際にはアクセルペダル7をオン操作した状態でシフト位置PSを駆動位置へ切り換えるという通常とは異なる操作が行なわれる。
【0034】
上述したように運転者が自覚せずに通常とは異なる操作を行なった場合、運転者が想定している車両1の挙動と実際の車両1の挙動とが食い違うおそれがある。詳しくは、運転者はアクセルペダル7をオン操作したときに車両1を発進させるつもりであるのに対し、実際には上記アクセルペダル7のオン操作後、シフト位置PSを駆動位置に切り換えたときに内燃機関2の駆動力が車輪4に伝達されて車両1が発進する。このように、アクセルペダル7がオン操作された状態でシフト位置PSが駆動位置に切り換えられた後に内燃機関2の駆動力が車輪4に伝達されると、運転者に違和感を与えるおそれがある。
【0035】
そこで、本実施形態では、こうした不都合の発生を抑制すべく、電子制御装置5を通じて、アクセルペダル7がオン操作された状態でシフト位置PSが非駆動位置から駆動位置に切り換えられたとき、車両の実加速度Arが加速度上限値Athを上回らないように内燃機関2から出力される駆動力を制御する駆動力抑制処理を実行するようにしている。
【0036】
ここで、上述した状況下において運転者に違和感を与えることを抑制する上では、駆動力抑制処理において加速度上限値Athを低く設定することが望ましい。
ところで、アクセルペダル7がオン操作された状態でシフト位置PSが非駆動位置から駆動位置に切り換えられたとき、当該アクセルペダル7のオン操作が泥濘路から車両1を脱出させるための発進操作である場合がある。この場合、車両1を前後に動かす際、特にその進行方向が切り替わるときには内燃機関2から出力される駆動力に抗して車輪4から機関出力軸に作用する力が大きくなり、これによって内燃機関2から出力される駆動力が変動し、一時的に大きく低下することとなる。そのため、上述したように加速度上限値Athが低く設定されていると、内燃機関2から出力される駆動力が不足し、泥濘路からの脱出に時間を要するおそれがある。ちなみに、車両1を前後に動かすべく、駆動位置であるドライブ位置とリバース位置との間でシフト位置PSを切り換える際、シフト位置PSがドライブ位置とリバース位置との間に位置するニュートラル位置を経由する。したがって、シフト位置PSがニュートラル位置、すなわち非駆動位置から駆動位置に切り換えられるといった状況が生じる。
【0037】
そこで、本実施形態では、車両の実加速度Arが加速度上限値Athを上回ってから内燃機関2から出力される駆動力の低減を開始するまでに所定の遅れ時間τを設けるようにしている。また、アクセルペダル7がオン操作された状態でシフト位置PSが非駆動位置から駆動位置に切り換えられたとき、当該シフト位置PSの切り換えに起因した駆動力の変動が収束するまでに要する時間に応じて所定の遅れ時間τを変更するようにしている。具体的には当該シフト位置PSがドライブ位置に切り換えられた場合にはリバース位置に切り換えられた場合に比べて所定の遅れ時間τを長くしている。
【0038】
また、駆動力抑制処理において車速SPDにかかわらず加速度上限値を固定値とすると、以下のような不都合が生じるおそれがある。すなわち例えば、加速度上限値が車速SPDが小さいときに対応して大きな値に設定されている場合には、車速SPDが上昇した場合に車両の実加速度Arが同加速度上限値Ath以下であっても駆動力の低減態様によっては運転者に違和感を与えることとなる。
【0039】
そこで、本実施形態では、駆動力抑制処理において駆動力の抑制が不十分となることを的確に抑制すべく、車速SPDが大きいときには小さいときに比べて加速度上限値Athを小さくしている。
【0040】
次に、本実施形態の作用について説明する。
アクセルペダル7がオン操作された状態でシフト位置PSが非駆動位置から駆動位置に切り換えられたときには、上記駆動力抑制処理が実行されることにより、車両の実加速度Arが加速度上限値Athを上回らないように内燃機関2から出力される駆動力が制御されるようになる。このため、車両の実加速度Arが加速度上限値Athを上回ることが抑制されるようになる。
【0041】
また、駆動力抑制処理において車両の実加速度Arが加速度上限値Athを上回った場合に直ぐさま駆動力の低減が開始されるのではなく、所定の遅れ時間τが経過した後に駆動力の低減が開始されるようになる。
【0042】
また、アクセルペダル7がオン操作された状態でシフト位置PSが非駆動位置から駆動位置に切り換えられたとき、当該シフト位置PSの切り換えに起因した駆動力の変動が収束するまでに要する時間に応じて所定の遅れ時間τが変更される。具体的には当該シフト位置PSがドライブ位置に切り換えられた場合にはリバース位置に切り換えられた場合に比べて所定の遅れ時間τが長くされる。
【0043】
ここで、このように所定の遅れ時間τをシフト位置PSに応じて可変設定している理由について説明する。
アクセルペダル7がオン操作された状態でシフト位置PSが非駆動位置から駆動位置に切り換えられたとき、例えば当該シフト位置がドライブ位置に切り換えられた場合とリバース位置に切り換えられた場合とでは変速装置3の変速比が異なるために、内燃機関2から出力される駆動力の変動が収束して安定するまでに要する時間が異なる。前述したように、本実施形態ではシフト位置PSがリバース位置である場合にはドライブ位置である場合に比べて変速装置3の変速比が大きくされている。そのため、シフト位置PSがドライブ位置に切り換えられた場合の方がリバース位置に切り換えられた場合に比べて内燃機関2から出力される駆動力の変動が収束して安定するまでに要する時間は長くなる。したがって本実施形態では、このようにシフト位置PSに応じて駆動力の変動が収束するまでに要する時間が異なることに着目することで所定の遅れ時間τをシフト位置PSに応じて可変設定している。
【0044】
次に、図2及び図3のフローチャートを参照して、駆動力抑制処理を含む駆動制限ルーチンの実行手順について詳細に説明する。尚、このフローチャートに示される一連の処理は電子制御装置5を通じて所定時間毎の時間割り込みにて周期的に実行される。
【0045】
図2に示すように、この一連の処理ではまず、実行フラグがオフであるか否かを判断する(ステップS1)。この実行フラグは、駆動力抑制処理が実行されているときにはオンにされる一方、駆動力抑制処理の実行が停止されているときにはオフとされる。このため、実行フラグは最初の制御周期においてはオフにされている。
【0046】
ここで、実行フラグがオフである場合(ステップS1:「YES」)には、このとき駆動力抑制処理が実行されていないとして、次に、駆動力抑制処理の実行を開始すべき状況であるか否かを判断する。すなわち、まずはアクセルペダル7がオン操作されているか否かを判断する(ステップS2)。ここで、アクセルペダル7がオン操作されていない場合(ステップS2:「NO」)には、駆動力抑制処理の実行を開始すべき状況ではないとして、この一連の処理を一旦終了する(図2及び図3にそれぞれ示すA2参照)。
【0047】
一方、アクセルペダル7がオン操作されている場合(ステップS2:「YES」)には、次に、シフト位置PSが非駆動位置(パーキング位置又はニュートラル位置)から駆動位置(ドライブ位置又はリバース位置)に切り換えられたか否かを判断する(ステップS3)。ここで、シフト位置PSが非駆動位置から駆動位置に切り換えられていない場合(ステップS3:「NO」)には、駆動力抑制処理の実行を開始すべき状況ではないとして、この一連の処理を一旦終了する(図2及び図3にそれぞれ示すA2参照)。
【0048】
一方、シフト位置PSが非駆動位置から駆動位置に切り換えられた場合(ステップS3:「YES」)、すなわちアクセルペダル7がオン操作された状態でシフト位置PSが非駆動位置から駆動位置に切り換えられたとき、には、次に、駆動力抑制処理を実行すべく、実行フラグをオンにする(ステップS4)。そして、次に、切り換えられたシフト位置PSがドライブ位置であるか否かを判断する(ステップS5)。ここで、シフト位置PSがドライブ位置である場合(ステップS5:「YES」)には、次に、所定の遅れ時間τを第1の所定時間τ1に設定する(ステップS6)。また、シフト位置PSがドライブ位置ではない場合(ステップS5:「NO」)、すなわちリバース位置である場合には、次に、所定の遅れ時間τを第1の所定時間よりも短い第2の所定時間τ2(<τ1)に設定する(ステップS7)。本実施形態では、第1の所定時間τ1を例えば400ミリ秒に設定し、第2の所定時間τ2を300ミリ秒に設定している。これら遅れ時間τは、泥濘路において車両1を前後に動かす際に内燃機関2から出力される駆動力が不足することが抑制されるように実験等を通じて予め設定されている。
【0049】
こうして所定の遅れ時間τを設定すると、次に、そのときの車速SPDに基づき加速度上限値Athを設定する。すなわち、図4に示すように、車速SPDが「0」から第1所定速度S1までは加速度上限値Athは第1上限値Ath1(一定)とされ、車速SPDが第1所定速度S1から第2所定速度S2までの範囲においては車速SPDが大きくなるときほど加速度上限値Athは小さくされる。また、車速SPDが第2所定速度S2以上においては加速度上限値Athは「0」とされる。こうした車速SPDと加速度上限値Athとの関係は、内燃機関2から出力される駆動力が泥濘路から脱出可能な値とされつつ低減されるように実験等を通じて予め設定されている。
【0050】
こうして加速度上限値Athを設定すると、次に、そのときの実加速度Arが加速度上限値Athを上回っているか否かを判断する(ステップS9)。ちなみに、車両の実加速度Arは車速SPDの検出結果に基づき算出される。ここで、実加速度Arが加速度上限値Ath以下である場合には(ステップS:「NO」)、低減量ΔFを「0」に設定し(ステップS12)、次にステップS13に進む。この低減量ΔFは、実加速度Arが上記加速度上限値Athを上回っている場合において実加速度Arが同加速度上限値Athとなるように内燃機関2から出力される駆動力の制御目標値である駆動力目標値Ftを減じるための補正量である。
【0051】
一方、実加速度Arが加速度上限値Athを上回っている場合(ステップS9:「YES」)には、次に、実加速度Arが加速度上限値Athを上回ってからの経過時間Δtが先に設定した所定の遅れ時間τ以上であるか否かを判断する(ステップS10)。ここで、経過時間Δtが所定の遅れ時間τ未満である場合(ステップS10:「NO」)には、ステップS12に進み、低減量ΔFを「0」に設定し、次に、ステップS13に進む。
【0052】
一方、経過時間Δtが所定の遅れ時間τ以上である場合(ステップS10:「YES」)には、次に、そのときの実加速度Arと加速度上限値Athとの偏差(以下、加速度偏差ΔA)に基づき低減量ΔFを設定する。すなわち、実加速度Arが上記加速度上限値Athを上回っている場合において加速度偏差ΔAが大きいときほど上記低減量ΔFには大きな値が設定される。
【0053】
こうして低減量ΔFを設定すると(ステップS11,S12)、次に、式(1)に従って駆動力目標値Ftを設定する(ステップS13)。
Ft ← Faccp − ΔF ・・・(1)
すなわち、アクセル操作量ACCPに基づき設定される駆動力要求値Faccpから低減量ΔFを減じた値を駆動力目標値Ftに設定する。そして、この駆動力目標値Ftに基づき内燃機関2を制御する。
【0054】
こうして駆動力抑制処理を実行すると、次に、図3に示すように、駆動力復帰処理の実行を開始すべき状況であるか否かを判断する。駆動力復帰処理は内燃機関2から出力される駆動力を復帰させるための処理である。具体的には、アクセル操作量ACCPが低減されて所定の操作量β以下となっているか否かを判断する(ステップS14)。ちなみに、本実施形態では所定の操作量βがアイドル相当のアクセル操作量ACCPとされている。
【0055】
ここで、アクセル操作量ACCPが所定の操作量β以下ではない場合(ステップS14:「NO」)には、駆動力抑制処理の実行を継続すべきであり、駆動力復帰処理の実行を開始すべき状況ではないとして、この一連の処理を一旦終了する。
【0056】
一方、アクセル操作量ACCPが所定の操作量β以下である場合(ステップS14:「YES」)には、次に、駆動力抑制処理の実行を停止すべく、実行フラグをオフにする(ステップS15)。そして、次に、駆動力復帰処理を実行して、この一連の処理を一旦終了する。
【0057】
駆動力復帰処理では、駆動力目標値Ftが先の式(1)により設定された値から、次の式(2)により設定される値へと徐変されるようになる。
Ft ← Faccp ・・・(2)
すなわち、駆動力目標値Ftを、アクセル操作量ACCPに基づき設定される駆動力要求値Faccpへと徐変させるとともに、この駆動力目標値Ftに基づき内燃機関2を制御する。
【0058】
尚、電子制御装置5が本発明に係る制御部に相当し、シフトレバー9が本発明に係るシフト機構に相当する。
以上説明した本実施形態に係る車両の駆動制御装置によれば、以下に示す作用効果が得られるようになる。
【0059】
(1)電子制御装置5は、アクセルペダル7がオン操作された状態でシフト位置PSが非駆動位置から駆動位置に切り換えられたとき、車両の実加速度Arが加速度上限値Athを上回らないように内燃機関2から出力される駆動力を制御する駆動力抑制処理を実行するようにした。こうした構成によれば、アクセルペダル7がオン操作された状態でシフト位置PSが非駆動位置から駆動位置に切り換えられるときに運転者に違和感を与えることを的確に抑制することができるようになる。
【0060】
(2)車両の実加速度Arが加速度上限値Athを上回ってから内燃機関2から出力される駆動力の低減を開始するまでに所定の遅れ時間τを設けるようにした。したがって、駆動力抑制処理において加速度上限値Athを低く設定しつつも、泥濘路において車両1を前後に動かす際に内燃機関2から出力される駆動力が不足することを好適に抑制することができるようになる。
【0061】
(3)シフト位置PSがリバース位置である場合にドライブ位置である場合に比べて変速装置3の変速比が大きくされるものとした。また、当該シフト位置PSがドライブ位置に切り換えられた場合にはリバース位置に切り換えられた場合に比べて所定の遅れ時間τを長くするようにした。こうした構成によれば、所定の遅れ時間τを適切に設定することができ、内燃機関2から出力される駆動力が不足するといった状況の発生を的確に抑制することができるようになる。また、当該シフト位置PSの切り換えに起因して生じる駆動力の変動が収束するまでに要する時間を当該シフト位置PSに応じて把握することができ、そうして把握した時間に応じて所定の遅れ時間τを簡易且つ的確に設定することができるようになる。
【0062】
(4)電子制御装置5は、車速SPDが大きいときには小さいときに比べて加速度上限値Athを小さくするようにした。こうした構成によれば、駆動力抑制処理において駆動力を的確に抑制することができる。
【0063】
尚、本発明に係る車両の駆動制御装置は、上記実施形態にて例示した構成に限定されるものではなく、これを適宜変更した例えば次のような形態として実施することもできる。
・上記実施形態では車両1の駆動源としての原動機の一例として内燃機関2について例示した。しかしながら、本発明に係る原動機はこれに限られるものではなく、内燃機関及び電動モータの双方からなる原動機であってもよいし、電動モータのみからなる原動機であってもよい。
【0064】
・上記実施形態では、アクセルの一例としてアクセルペダル7について例示したが、アクセルはこのように運転者の足先により操作されるものに限られるものではない。他に例えば運転者の手により操作されるアクセルレバーを採用することもできる。
【0065】
・車速SPDと加速度上限値Athとの関係は上記実施形態において例示したものに限られず、これを適宜変更することができる。また、上記実施形態において例示したように、車速SPDが大きいときには小さいときに比べて加速度上限値Athを小さく設定するようにすることが、内燃機関2から出力される駆動力Fを適切に制限する上では望ましい。しかしながら、本発明はこのように加速度上限値Athが車速SPDに応じて可変設定されるものに限られるものではなく、車速SPDにかかわらず加速度上限値を固定値とすることもできる。
【0066】
・上記実施形態では、シフト位置PSがリバース位置である場合はドライブ位置である場合に比べて変速装置3の変速比が大きくされる車両1について例示した。しかしながら、シフト位置PSがリバース位置である場合はドライブ位置である場合に比べて変速装置の変速比が小さくされる車両に対して本発明を適用することもできる。この場合、シフト位置PSが非駆動位置からドライブ位置に切り換えられた場合にリバース位置に切り換えられた場合に比べて所定の遅れ時間τを短くすればよい。
【0067】
・上記実施形態及びその変形例では、ドライブ位置とリバース位置とで変速装置の変速比が異なる車両について例示した。しかしながら、ドライブ位置とリバース位置とで変速装置の変速比が同一とされる車両にあっては、上記所定の遅れ時間τを同一の値に設定すればよい。
【0068】
・本発明は、前進駆動位置における変速比と後退駆動位置における変速比との関係に基づき所定の遅れ時間τを設定するものに限られない。他に例えば、こうした変速比にかかわらず所定の遅れ時間を固定値とすることもできる。この場合、車両の駆動制御装置における制御構成を簡易なものとすることができる。
【0069】
・上記実施形態のように、駆動力の低減を開始するまでに所定の遅れ時間τを設けるようにすることが、駆動力抑制処理において加速度上限値Athを低く設定しつつも、泥濘路において車両1を前後に動かす際に内燃機関2から出力される駆動力が不足することを好適に抑制する上では望ましい。しかしながら、駆動力抑制処理における加速度上限値がある程度高く設定されるものにあってはこのような所定の遅れ時間を設けないものとすることもできる。要するに、アクセルがオン操作された状態でシフト位置が非駆動位置から駆動位置に切り換えられたとき、車両の加速度が加速度上限値を上回らないように原動機から出力される駆動力を制御する駆動力抑制処理を実行するものであればよい。
【符号の説明】
【0070】
1…車両、2…内燃機関、3…変速装置、4…車輪、5…電子制御装置、6…車速センサ、7…アクセルペダル、8…アクセル操作量センサ、9…シフトレバー、10…シフト位置センサ。
【特許請求の範囲】
【請求項1】
車両の駆動源としての原動機から出力される駆動力をアクセルの操作に応じて制御する制御部と、駆動位置及び非駆動位置のいずれか一方にシフト位置が選択的に切り換え可能なシフト機構とを備え、前記シフト位置が駆動位置にあるときに原動機から車輪に駆動力を伝達する一方、前記シフト位置が非駆動位置にあるときには原動機から車輪への駆動力の伝達を遮断する車両の駆動制御装置において、
前記制御部は、アクセルがオン操作された状態で前記シフト位置が非駆動位置から駆動位置に切り換えられたとき、車両の加速度が加速度上限値を上回らないように原動機から出力される駆動力を制御する駆動力抑制処理を実行する
ことを特徴とする車両の駆動制御装置。
【請求項2】
請求項1に記載の車両の駆動制御装置において、
前記制御部は、車両の加速度が加速度上限値を上回ってから前記駆動力の低減を開始するまでに所定の遅れ時間を設ける
ことを特徴とする車両の駆動制御装置。
【請求項3】
請求項2に記載の車両の駆動制御装置において、
前記制御部は、アクセルがオン操作された状態で前記シフト位置が非駆動位置から駆動位置に切り換えられたとき、当該シフト位置の切り換えに起因した前記駆動力の変動が収束するまでに要する時間に応じて前記所定の遅れ時間を変更する
ことを特徴とする車両の駆動制御装置。
【請求項4】
請求項3に記載の車両の駆動制御装置において、
前記シフト位置が後退駆動位置である場合と前進駆動位置である場合とで変速装置の変速比が異なるものとされ、
前記制御部は、当該シフト位置に応じて前記所定の遅れ時間を変更する
ことを特徴とする車両の駆動制御装置。
【請求項5】
請求項4に記載の車両の駆動制御装置において、
前記シフト位置が後退駆動位置である場合に前進駆動位置である場合に比べて変速装置の変速比が大きくされ、
前記制御部は、当該シフト位置が前進駆動位置に切り換えられた場合には後退駆動位置に切り換えられた場合に比べて前記所定の遅れ時間を長くする
ことを特徴とする車両の駆動制御装置。
【請求項6】
請求項1〜請求項5のいずれか一項に記載の車両の駆動制御装置において、
前記制御部は、車両の走行速度が大きいときには小さいときに比べて加速度上限値を小さくする
ことを特徴とする車両の駆動制御装置。
【請求項1】
車両の駆動源としての原動機から出力される駆動力をアクセルの操作に応じて制御する制御部と、駆動位置及び非駆動位置のいずれか一方にシフト位置が選択的に切り換え可能なシフト機構とを備え、前記シフト位置が駆動位置にあるときに原動機から車輪に駆動力を伝達する一方、前記シフト位置が非駆動位置にあるときには原動機から車輪への駆動力の伝達を遮断する車両の駆動制御装置において、
前記制御部は、アクセルがオン操作された状態で前記シフト位置が非駆動位置から駆動位置に切り換えられたとき、車両の加速度が加速度上限値を上回らないように原動機から出力される駆動力を制御する駆動力抑制処理を実行する
ことを特徴とする車両の駆動制御装置。
【請求項2】
請求項1に記載の車両の駆動制御装置において、
前記制御部は、車両の加速度が加速度上限値を上回ってから前記駆動力の低減を開始するまでに所定の遅れ時間を設ける
ことを特徴とする車両の駆動制御装置。
【請求項3】
請求項2に記載の車両の駆動制御装置において、
前記制御部は、アクセルがオン操作された状態で前記シフト位置が非駆動位置から駆動位置に切り換えられたとき、当該シフト位置の切り換えに起因した前記駆動力の変動が収束するまでに要する時間に応じて前記所定の遅れ時間を変更する
ことを特徴とする車両の駆動制御装置。
【請求項4】
請求項3に記載の車両の駆動制御装置において、
前記シフト位置が後退駆動位置である場合と前進駆動位置である場合とで変速装置の変速比が異なるものとされ、
前記制御部は、当該シフト位置に応じて前記所定の遅れ時間を変更する
ことを特徴とする車両の駆動制御装置。
【請求項5】
請求項4に記載の車両の駆動制御装置において、
前記シフト位置が後退駆動位置である場合に前進駆動位置である場合に比べて変速装置の変速比が大きくされ、
前記制御部は、当該シフト位置が前進駆動位置に切り換えられた場合には後退駆動位置に切り換えられた場合に比べて前記所定の遅れ時間を長くする
ことを特徴とする車両の駆動制御装置。
【請求項6】
請求項1〜請求項5のいずれか一項に記載の車両の駆動制御装置において、
前記制御部は、車両の走行速度が大きいときには小さいときに比べて加速度上限値を小さくする
ことを特徴とする車両の駆動制御装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2013−112183(P2013−112183A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−260566(P2011−260566)
【出願日】平成23年11月29日(2011.11.29)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月29日(2011.11.29)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]