
車両の駆動制御装置
【課題】運転者の意図に沿った空走状態で走行を行い得る車両の駆動制御装置を提供する。
【解決手段】エンジン2およびモータ・ジェネレータ3と、エンジン2およびモータ・ジェネレータ3の操作に供されるアクセルペダル装置22と、アクセルペダル装置22の操作量をアクセル操作量θaとして検出するアクセルペダルセンサ52と、アクセル操作量θaに基づいてエンジン2およびモータ・ジェネレータ3の出力および回転抵抗を制御する電子制御ユニット9とを備えた自動車1の駆動制御装置であって、電子制御ユニット9は、アクセル操作量θaが所定値θath以下の領域において、エンジン2およびモータ・ジェネレータ3の出力を0にするとともに、エンジン2およびモータ・ジェネレータ3の回転抵抗(要求)を、アクセル操作量θaが所定値θath付近にあるときに最も小さく、所定値θathから0に向かうにつれて増加させる。
【解決手段】エンジン2およびモータ・ジェネレータ3と、エンジン2およびモータ・ジェネレータ3の操作に供されるアクセルペダル装置22と、アクセルペダル装置22の操作量をアクセル操作量θaとして検出するアクセルペダルセンサ52と、アクセル操作量θaに基づいてエンジン2およびモータ・ジェネレータ3の出力および回転抵抗を制御する電子制御ユニット9とを備えた自動車1の駆動制御装置であって、電子制御ユニット9は、アクセル操作量θaが所定値θath以下の領域において、エンジン2およびモータ・ジェネレータ3の出力を0にするとともに、エンジン2およびモータ・ジェネレータ3の回転抵抗(要求)を、アクセル操作量θaが所定値θath付近にあるときに最も小さく、所定値θathから0に向かうにつれて増加させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、駆動源の出力を0にした空走状態における駆動源の回転抵抗を、アクセル操作量に応じて変化させる車両の駆動制御装置に関する。
【背景技術】
【0002】
自動車の制御において、燃費効率を向上させるために、運転者がアクセルペダルの踏み込みを解除すると、エンジンへの燃料供給を停止(フューエルカット)してエンジン出力を0にして、車両を空走状態にする制御を行うことがある。しかし、空走状態を維持し続けると、エンジンの回転数が低下するため、エンジンストールが起きないように一定値以上のエンジン回転数を保つ必要があることが、特許文献1により知られている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特公昭60−35854号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の発明では、変速機をダウンシフトさせることで必要なエンジン回転数を維持するように制御している。しかし、このような制御によって必要以上に減速されてしまうと、運転者が速度を維持しようとしてアクセルペダルを踏み込むことで、無駄に燃料を消費しかねない。
【0005】
また、必要以上の制動を行わないことが実燃費改善に効果があることを運転者が知っていたとしても、特に、オートマティックトランスミッション(AT)車においては、車両側で制御装置がエンジンブレーキの量を設定してしまうため、運転者はエンジンブレーキの多寡を自ら制御することができず、その意思を車両に反映させることができない。このような課題は、特許文献1の発明を含む従来の技術において解決されていない。
【0006】
本発明は、このような従来技術に含まれる課題を解消するべく案出されたものであり、運転者の意図に沿った空走状態で走行を行い得る車両の駆動制御装置を提供することをその第1の目的とする。
【0007】
また、燃費を向上させるにあたり、走行抵抗を低減すべくエンジンのポンピングロスを減らすために、大量EGR(排出ガス再循環)によって排出ガスを吸気に混ぜることで、インテークマニホールド圧が下がらないように制御することが、特開昭61−14462号公報により知られているが、このような制御を行うと、エンジンブレーキが弱くなるため、操作性の違和感を運転者に与える虞がある。
【0008】
さらに、大量EGRを行うと、インテークマニホールド圧が下がり難くなるため、ブレーキに真空倍力装置を用いている場合には、真空倍力装置に供給される負圧が不足する虞もある。
【0009】
そこで本発明は、このような燃費向上技術と操作性とを両立させるにあたり、運転者が意図したように車両の状態を調整できるようにすることを第2の目的とする。
【課題を解決するための手段】
【0010】
このような課題を解決するために、本発明の一側面によれば、駆動源(2、3)と、前記駆動源の操作に供されるアクセル操作手段(22)と、前記アクセル操作手段の操作量をアクセル操作量(θa)として検出するアクセル検出手段(52)と、前記アクセル操作量に基づいて前記駆動源の出力を制御するとともに、前記駆動源の回転抵抗を制御する駆動制御手段(9)とを備えた車両(1)の駆動制御装置であって、前記駆動制御手段は、前記アクセル操作量が所定値(θath)以下の領域において、前記駆動源の出力を0にするとともに、前記駆動源の回転抵抗を、前記アクセル操作量が前記所定値付近にあるときに最も小さく、前記所定値から0に向かうにつれて増加させることを特徴とする。
【0011】
この構成によれば、駆動源の出力を増加させずに惰性走行(空走)を行いたい場合、運転者はアクセル操作手段の操作により駆動源の回転抵抗を調整できるため、意図に沿った燃費向上走行を行うことができる。これにより、駆動源のエネルギ消費(駆動源がガソリンである場合は燃料消費。駆動源がモータの場合は電力消費。)を抑制する効果を得ることができる。
【0012】
また、本発明の一側面によれば、前記アクセル操作手段は、前記所定値において反力特性が変化するように設けられたことを特徴とする。
【0013】
この構成によれば、駆動源の出力を増加させずに惰性走行(空走)を行いたい場合、運転者は車両の加減速状態などに依らずにアクセル操作部材の反力特性から駆動源の回転抵抗が小さくなるアクセル操作量を認識することができる。そのため、より効果的に駆動源のエネルギ消費を抑制することができる。また操作性の違和感を運転者に与えることも抑制できる。
【0014】
また、本発明の一側面によれば、前記アクセル操作手段は、前記所定値において反力が有意に大きくなるように設けられたことを特徴とする。
【0015】
この構成によれば、駆動源の出力を増加させずに惰性走行(空走)を行いたい場合、運転者はアクセル操作部材を所定値の操作量の位置に容易に保持できるため、駆動源の出力を0に保持するとともに回転抵抗が最も小さい状態をより長くすることができる。
【0016】
また、本発明の一側面によれば、前記駆動源は、内燃機関(2)と、当該内燃機関の排気ガスの一部を排気通路から取り出して吸気通路に還流させるEGR手段(31、33)とを含み、前記駆動制御手段は、前記アクセル操作量が前記所定値のときに、前記EGR手段に還流させる排気ガスの量を最も大きくすることを特徴とする。
【0017】
この構成によれば、アクセル操作量が所定値付近のときに、惰性走行時のポンピングロスを低減することができ、燃費向上を図ることができる。
【0018】
また、本発明の一側面によれば、前記駆動制御手段は、前記アクセル操作量が0のときに、前記EGR手段による排気ガスの還流を遮断することを特徴とする。
【0019】
この構成によれば、運転者がアクセルペダルの踏込を解除したときは、EGRによる還流が遮断されることで、内燃機関の回転抵抗を高めてエンジンブレーキによる車両の減速度を確保できるため、アクセル操作性を向上させ得るとともに、ブレーキが真空倍力装置を利用する場合には、ブレーキ側に供給される内燃機関からの負圧を確保することができるため、ブレーキ操作性をも向上させることができる。
【0020】
また、本発明の一側面によれば、前記駆動制御手段は、前記車両が停車中の場合、前記アクセル操作量が0から前記所定値に向かうにつれて前記内燃機関のアイドル回転数を増加させることを特徴とする。
【0021】
この構成によれば、車両が停車中には、アクセル操作量が所定値以下の領域においても、アイドル回転数を変化させることで、運転者のアクセル操作に基づいて、燃費性能向上とクリープ力の増加による発進時性能向上とを両立させることができる。
【0022】
また、本発明の一側面によれば、前記駆動源に付設され、前記車両の走行状態に基づいて前記駆動制御手段によってその変速段または変速比が制御される変速機構(4)を更に備え、前記駆動制御手段は、前記車両の状態に応じて、前記アクセル操作量が前記所定値付近のときに前記変速機構の変速段または変速比を低速側に変速させないことを特徴とする。
【0023】
この構成によれば、アクセル操作量が所定値付近のときに、変速機構の変速段または変速比が低速側に変速することで駆動源の回転抵抗が増加することを回避できるため、運転者が維持しやすいアクセル操作量の位置で燃費を向上させることができる。なお、車両の状態によっては、変速機構の変速段または変速比を低速側に変速させることもあり得る。
【0024】
また、本発明の一側面によれば、前記駆動源は、電力供給により駆動されるとともに強制回転により電力を回生するモータ(3)を含み、前記駆動制御手段は、前記モータによる回生量を、前記アクセル操作量が前記所定値から0に向かうにつれて増加させることを特徴とする。
【0025】
この構成によれば、アクセル操作量が所定値付近のときには、回生による制動力を最小限にすることができるため、惰性走行性能を確保することができるとともに、アクセル操作量が0に向かうにつれて回生量を増加させて車両の減速度を確保することもできるため、操作性を担保しつつ、アクセル操作に基づく燃費向上走行を実現することができる。
【図面の簡単な説明】
【0026】
【図1】実施形態に係る自動車の駆動系の要部系統図
【図2】図1に示すエンジンの吸排気系の要部系統図
【図3】自動車に装備されるブレーキ装置の概略構成図
【図4】図1にアクセルペダル装置の概略構成図
【図5】アクセル操作量と踏込反力との関係を示すグラフ
【図6】図1に示す電子制御ユニットの機能ブロック図
【図7】アクセル操作量と要求出力および要求抵抗との関係を示すグラフ
【図8】図6に示す電子制御ユニットによるエンジン制御のフローチャート
【図9】図6に示す電子制御ユニットによるエンジン・モータ制御のフローチャート
【発明を実施するための形態】
【0027】
以下、図面を参照しながら、本発明を一実施形態について、図面を参照して詳細に説明する。
【0028】
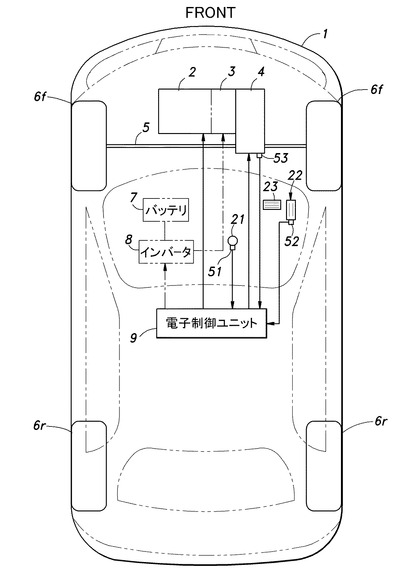
先ず、図1を参照して、実施形態に係る自動車1の概略構成について説明する。自動車1は、駆動源としてガソリンエンジン(以下、単にエンジン2と記す。)を搭載しており、エンジン2の出力をオートマティックトランスミッション(以下、単にトランスミッション4と記す。)および前輪車軸5介して駆動輪に伝達する。なお、図示例では、自動車1は前輪6fを駆動輪とする前輪駆動車であるが、後輪6rを駆動輪とする後輪駆動車または前後両車輪6を駆動輪とする四輪駆動車とすることもできる。以下、トランスミッション4については、前進4段、後退1段の多段変速式として説明するが、連続可変トランスミッション(CVT)を用いることもできる。
【0029】
自動車1には、マイクロコンピュータやROM、RAM、周辺回路、入出力インタフェース、各種ドライバ等から構成された電子制御ユニット9の他、トランスミッション4のシフトレンジの変更操作に供されるシフトレバー21や、シフトレバー21の操作位置(レンジ)を検出するシフトレンジセンサ51、エンジン2の操作に供されるアクセルペダル装置22、アクセルペダル装置22の操作量をアクセル操作量θaとして検出するアクセルペダルセンサ52、自動車1の制動操作に供されるブレーキペダル23、ブレーキペダル23の操作に応じて各車輪6に制動力を発生させるブレーキ装置24(図3参照)、車速Vを検出する車速センサ53などが設けられている。
【0030】
なお、自動車1は、駆動源としてエンジン2の代わりに、またはエンジン2とともに、想像線で示すモータ・ジェネレータ3を搭載する電気自動車またはハイブリッド車であってもよい。この場合、モータ・ジェネレータ3は、車両走行用の電動機と回生用の発電機とを兼ねたものであり、二次電池であるバッテリ7からの電力供給とバッテリ7に対する電力供給(充電)とをインバータ8によって制御され、減速時に減速エネルギを電力に変換回生して回生制動を発生する回生制動手段として機能する。そして、ブレーキ装置24には、運転者によるブレーキペダル23の操作に応じたブレーキ液圧とは独立して、所望にブレーキ液圧を制御できるブレーキ・バイ・ワイヤ形式が採用され、ブレーキ装置24と回生ブレーキとに制動力を分配する回生協調制御が行われる。
【0031】
電子制御ユニット9は、エンジン2(および/またはモータ・ジェネレータ3)の出力制御の他、エンジン2の出力を略0にして自動車1の慣性力で走行を続ける空走状態でのエンジン2の回転抵抗の制御や、シフトレバー21の操作位置や車速V、アクセル操作量θaなどに応じてトランスミッション4のギヤ段(変速比)の制御を行う。また、自動車1がハイブリッド自動車または電気自動車である場合、電子制御ユニット9はモータ・ジェネレータ3の駆動/回生も制御する。
【0032】
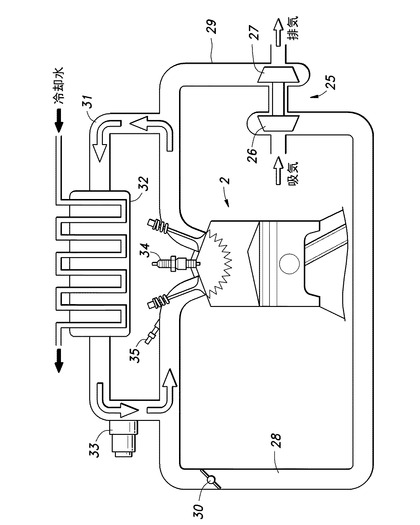
図2に示すように、エンジン2は、その機械的な構成自体は周知のものと何ら変わるところはなく、過給圧可変機構付きターボチャージャ25を備えるものであり、ターボチャージャ25のコンプレッサ26側に吸気通路28が連結され、ターボチャージャ25のタービン27側に排気通路29が連結されている。そして吸気通路28の上流端に図示しないエアクリーナが接続され、吸気通路28の適所に燃焼室に流入する新気の流量を調節するためのスロットルバルブ30が設けられている。
【0033】
吸気通路28におけるスロットルバルブ30の下流側部分と、排気通路29における燃焼室とタービン27との間の部分とは、排出ガス再循環通路(以下、EGR通路31と記す。)によって互いに接続されている。このEGR通路31は、排気通路29を流通する排気ガスを吸気通路28へ還流させるものであり、EGRクーラー32を通過させることで排気ガスを冷却するとともに、その下流側に設けられたEGRバルブ33によって燃焼室に還流させる排気ガスの量(EGR量)を調節する。
【0034】
エンジン2のシリンダヘッドには、その先端を燃焼室に臨ませた点火コイル34が設けられている。また、吸気通路28の下流端付近には、電子制御式の燃料噴射弁35が燃焼室に向けて設けられている。燃料噴射弁35には、図示しないクランク軸にて駆動されて燃料タンクから燃料を汲み上げる燃料ポンプから燃料が供給される。
【0035】
これらのターボチャージャ25の過給圧可変機構、スロットルバルブ30およびEGRバルブ33、点火コイル34、燃料噴射弁35・・・等は、電子制御ユニット9からの制御信号によって作動するように構成されている(図5参照)。
【0036】
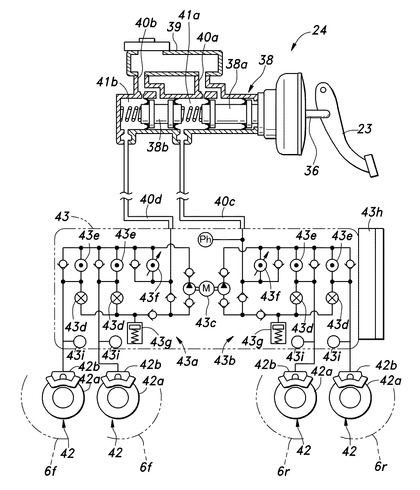
次に、図3を参照して、自動車1に設けられたブレーキ装置24について説明する。ブレーキペダル23は車体に回動自在に支持されており、運転者の制動操作に応じて円弧運動を行う。ブレーキペダル23にはその円弧運動を略直線運動に変換するロッド36の一端が連結されており、ロッド36の他端は、真空倍力装置37を介して直列的に配設されたマスターシリンダ38の第1ピストン38aに対し、運転者の制動操作に応じて押し込むように係合している。真空倍力装置37は、吸気通路28におけるスロットルバルブ30の下流側と連通し、エンジン2の吸気により発生する負圧を利用してマスターシリンダ38を押し込む力を補助する。
【0037】
マスターシリンダ38における第1ピストン38aのロッド36と相反する側には、第2ピストン38bが直列的に配設されており、各ピストン38a・38bはそれぞれロッド36側にばね付勢されている。マスターシリンダ38には、ブレーキ液が不足した際にブレーキ液を補充するためのリザーブタンク39が設けられており、リザーブタンク39と連通する各油路40a・40bとの間をシールするための公知構造のシール部材が各ピストン38a・38bの適所に設けられている。そして、マスターシリンダ38の筒内には、第1ピストン38aと第2ピストン38bとの間に第1液室41aが形成され、第2ピストン38bの第1ピストン38aと相反する側に第2液室41bが形成される。
【0038】
前輪6f及び後輪6rの各車輪6には、摩擦制動を行う摩擦制動手段として、車輪6(前輪6f・後輪6r)と一体のディスク42a及びホイールシリンダ42bを備えるキャリパにより構成される公知のディスクブレーキ42が設けられている。ホイールシリンダ42bには、公知のブレーキ配管を介してモジュレータ43が接続されている。
【0039】
マスターシリンダ38の第1液室41aは油路40cを介して、第2液室41bは油路40dを介して、それぞれモジュレータ43と連通している。さらに、モジュレータ43は、4つのホイールシリンダ42bに連通するように配管されている。なお、モジュレータ43は、制動制御ユニット43hと一体に形成され、ブレーキ時の車輪ロックを防ぐABS、加速時などの車輪空転を防ぐTCS(トラクションコントロールシステム)、旋回時のヨーモーメントを制御して横滑りを抑制する横滑り抑制制御、緊急時に所定のブレーキ圧を自動的にホイールシリンダ42bに作用させるブレーキアシスト機能、衝突回避・レーンキープなどのための自動ブレーキ機能等を備えた車両挙動安定化制御システムに供される公知のものであって良い。
【0040】
モジュレータ43は、前輪6fの各ホイールシリンダ42bに対応する第1系統43aと、後輪6rの各ホイールシリンダ42bに対応する第2系統43bと、両系統43a・43bに接続するポンプモータ43cとを備え、各系統43a・43bにはそれぞれ、常閉型のアウトバルブ43dや、常開型のインバルブ43e、レギュレータバルブ43f(ともに電磁弁)、低圧リザーバ43gなどが設けられている。これらのポンプモータ43c、アウトバルブ43d、インバルブ43eおよびレギュレータバルブ43f(ブレーキアクチュエータ)は、制動制御ユニット43hにより駆動制御される。また、モジュレータ43は、ホイールシリンダ42bに加わるブレーキ液圧を検出し得る位置に、各ホイールシリンダ42bに対してブレーキ液圧センサ43iを備えている。
【0041】
このように構成されたブレーキ装置24は、運転者がブレーキペダル23を操作すると、操作量に応じたブレーキ液圧がモジュレータ43を介して前後輪の各ホイールシリンダ42bに供給されて制動力を発生させるとともに、制動制御ユニット43hがポンプモータ43cを駆動することにより、ポンプモータ43cによって加圧されたブレーキ液が常開型のインバルブ43eを通してホイールシリンダ42bへ送られ、ブレーキ操作に応じた制動力とは独立して補助制動力を発生させる一方、制動制御ユニット43hが常閉型のアウトバルブ43dを開弁駆動するとともに常開型のインバルブ43eを閉弁駆動することにより、ブレーキ液が低圧リザーバ43g側へ排出され、ホイールシリンダ42bに発生する制動力を低減することができる。
【0042】
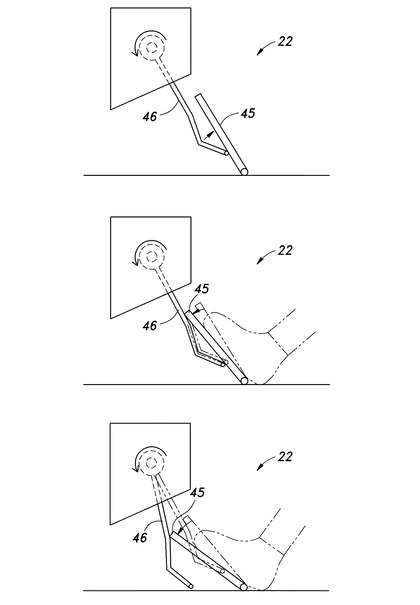
次に、図4を参照して、アクセルペダル装置22について説明する。図4(A)に示すように、アクセルペダル45は、その下端が車体に回動自在に支持されるとともにその背面にペダルアーム46が摺接している。ペダルアーム46は、図示しないリターンスプリングによって常時略同一のトルクで図中では反時計回り方向に付勢されており、アクセルペダル45を常時起立側に付勢する。
【0043】
アクセルペダル45が(A)に示す原位置にあるときには、ペダルアーム46の遊端(下端)がアクセルペダル45の下部に摺接しており、アクセルペダル45が踏み込まれると、ペダルアーム46を比較的小さな変動角で回動させる。アクセル操作が所定の踏込量(所定値θath)に達すると、(B)に示すように、ペダルアーム46の中間位置にアクセルペダル45の遊端(上端)が接触し、この踏込量よりもさらにアクセルペダル45が踏み込まれると、(C)に示すように、アクセルペダル45の遊端がペダルアーム46の中間部分を押しながら比較的大きな変動角でペダルアーム46を回動させる。
【0044】
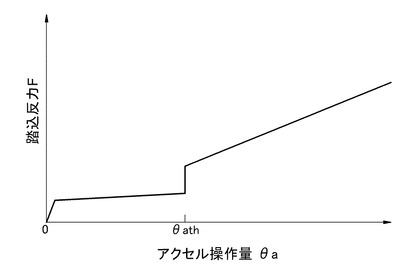
アクセルペダル装置22がこのように構成されたことにより、アクセルペダル45の踏込反力Fは、図5に示すように、アクセル操作量θaが0から所定値θathまでの操作量領域において、アクセル操作量θaに対して比較的小さな増大量をもって増大し、アクセル操作量θaが所定値θathのときに急激に立ち上がり、アクセル操作量θaが所定値θathよりも大きな操作量領域において、アクセル操作量θaに対して比較的大きな増大量をもって増大する。
【0045】
このように、所定値θathにおいて踏込反力Fが有意に大きくなるようにアクセルペダル45が設けられたことにより、所定値θathに反力の壁が生じ、運転者がアクセルペダル45を所定値θathに保持しやすくなっている。また、所定値θathを境にして反力特性(アクセル操作量θaに対する踏込反力Fの増大量)が変化することにより、運転者がアクセル操作量θaを認識しやすくなっている。また、アクセルペダル45の操作に要する踏力が、受動的な反力発生構造により一意に決定され、アクセルペダル45の踏込反力Fが有意に大きくなる位置(踏込量)が、積極的な加速も減速もしない位置と定められることで、車両制御上、運転者の意思を汲み取りやすくなり、その結果、運転者の意図しない制御となることが防止される。
【0046】
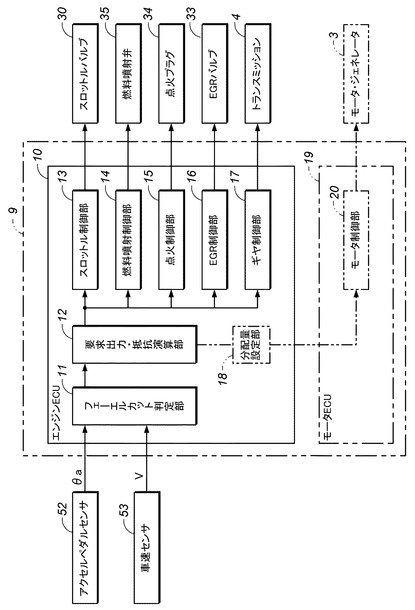
図6に示すように、電子制御ユニット9は、フューエルカット判定部11、要求出力・抵抗演算部12、スロットル制御部13、燃料噴射制御部14、点火制御部15、EGR制御部16、ギヤ制御部17を有するエンジンECU10を備えている。なお、自動車1がモータ・ジェネレータ3を備える場合、電子制御ユニット9は、エンジンECU10の他にモータECU19を備える。ここでは、まず電子制御ユニット9がエンジンECU10のみを備える場合について説明し、その後、モータECU19をも備える場合について説明する。
【0047】
フューエルカット判定部11は、アクセルペダルセンサ52の検出結果(アクセル操作量θa)および車速センサ53の検出結果(車速V)、ならびにトランスミッション4のギヤ比などに基づいて、エンジン2への燃料供給を停止するフューエルカットを行うか否かを判定する。ここでは、アクセル操作量θaが所定値θath以下であり、且つ車速Vが所定値以上である場合に、フューエルカットを行うように判定し、それ以外の場合にはフューエルカットを行わないように判定する。なお、車速Vおよびギヤ比の代わりにクランク角センサより求めたエンジン回転数などを用いてもよい。
【0048】
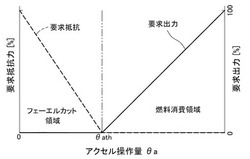
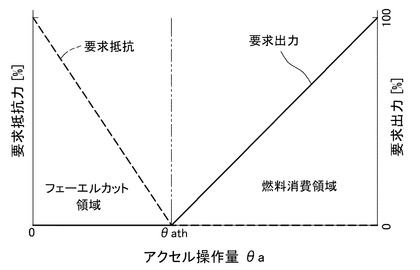
要求出力・抵抗演算部12は、アクセルペダルセンサ52の検出結果に基づいて、要求出力または要求抵抗を算出する。ここでは、図7に示すように、アクセル操作量θaが所定値θath未満である場合、駆動源による抵抗が要求されているものとして、アクセル操作量θaに応じた要求抵抗を算出し、アクセル操作量θaが所定値θathよりも大きい場合、駆動源による出力が要求されているものとして、アクセル操作量θaに応じた要求出力を算出する。
【0049】
スロットル制御部13は、アクセル操作量θaが所定値θathよりも大きく、フューエルカットを行わないときは、要求出力に比例する目標スロットル開度(図7参照)を設定し、スロットルバルブ30を駆動制御する。一方、アクセル操作量θaが所定値θath以下であるが、フューエルカットを行わないとき、およびフューエルカットを行うときは、スロットル制御部13はアクセル操作量θaに関わらず目標スロットル開度を0に設定してスロットルバルブ30を閉弁する。
【0050】
燃料噴射制御部14は、アクセル操作量θaが所定値θath以下であり、フューエルカットを行うときは、燃料噴射制御部14はアクセル操作量θaに関わらず目標燃料噴射量を0に設定してエンジン2への燃料供給を停止する。
【0051】
一方、アクセル操作量θaが所定値θathよりも大きく、フューエルカットを行わないときは、燃料噴射制御部14は、要求出力に応じた目標燃料噴射量を設定し、クランク角センサにより検出される所定のタイミングにて目標燃料噴射量を噴射するように燃料噴射弁35を制御する。他方、アクセル操作量θaが所定値θath以下であるが、フューエルカットを行わないときは、エンジン回転数が自律回転できなくなることを避けるため、アイドル用の目標燃料噴射量を設定して燃料噴射弁35を駆動制御する。
【0052】
ここで、アイドル用の目標燃料噴射量は、アクセル操作量θaが所定値θath以下の操作量領域においても、アクセル操作量θaが大きいほど(所定値θathに向かうにつれて)大きくなるように設定するとよい。例えば、アクセル操作量θaが0のときは、アイドル回転数が600rpmになるような目標燃料噴射量に設定し、アクセル操作量θaが所定値θathのときにアイドル回転数が800rpmになるように、アクセル操作量θaに応じて増大するように目標燃料噴射量を設定する。このようにすることにより、アクセル操作量θaが所定値θathに近づくにつれて、クリープ量を大きくし、停車時や超低速走行時に自動車1を円滑に発進させることができる。つまり、運転者は、アクセル操作によって燃費向上と発進時性能の向上との両立を実現できる。
【0053】
点火制御部15は、フューエルカットを行わないときは、目標点火タイミングを設定し、クランク角センサにより検出されるクランク角に基づいて目標点火タイミングにて点火プラグを点火させ、燃料に着火する。一方、フューエルカットを行わないときは、点火制御部15は点火プラグの点火を停止する。
【0054】
EGR制御部16は、フューエルカットを行わないときは、低負荷時などの所定の条件に応じて目標EGR開度を設定してEGRバルブ33を開弁させ、排気ガスを吸気通路28へ還流させる。これにより、通常走行時においても燃費を向上させることができる。一方、フューエルカットを行うときは、惰性走行によりクランクシャフトを強制的に回転させる際のエンジン2の回転抵抗を調整すべく、EGR制御部16は、要求抵抗(アクセル操作量θa)に応じて目標EGR開度を設定してEGRバルブ33を開弁する。具体的には、アクセル操作量θaが0のときに、排気ガスの還流を遮断してEGR量を0にすべく、目標EGR開度を0%(全閉)とし、アクセル操作量θaが所定値θathのときに、EGR量を最も大きくすべく、目標EGR開度を100%(全開)とし、アクセル操作量θaが0から所定値θathまでの間では、アクセル操作量θaに比例して大きくなるように目標EGR開度を設定してEGRバルブ33を制御する。
【0055】
EGR制御部16がこのようにEGRバルブ33を制御することにより、運転者は、走行中にエンジンブレーキを大きくしたい場合には、アクセル操作量θaを0にしてエンジン2のポンピングロス(エンジンブレーキ)を大きくし、惰性走行を行って燃費を向上させたい場合には、アクセルペダル45を所定値θathまで踏み込むことで、エンジンブレーキを最小限にすることができ、意図した通りの走行状態を作り出すことができる。また、上記したようにこのように踏込反力Fが所定値θathにおいて有意に大きくなるように設定され、運転者がアクセルペダル45を所定値θathに保持しやすくなっているため、エンジン出力を0に保持するとともにエンジンブレーキが最小限となる状態をより長くすることができる。さらに、運転者がブレーキ操作を行うときには、アクセル操作量θaが0になるため、ポンピングロスが大きく吸気通路28に負圧が発生した状態となって真空倍力装置37の負圧が確保され、ブレーキペダル23の踏込力が適正に補助されることになり、ブレーキ操作性の向上も図られる。
【0056】
ギヤ制御部17は、シフトレンジセンサ51が検出したシフトレンジに応じてトランスミッション4のギヤ段を変更するシフト制御を行う。例えば、シフトレンジとしては、P(パーキング)レンジ、R(リバース)レンジ、N(ニュートラル)レンジ、D(ドライブ)レンジ、L(ロー)レンジがあり、ギヤ制御部17は、トランスミッション4に接続する油圧回路に設けられた図示しないシフトソレノイドバルブを開閉駆動することにより、トランスミッション4を制御する。ギヤ制御部17は、PレンジおよびNレンジのときには、駆動力の伝達を遮断するように、また、Rレンジのときには、自動車1を後退走行させるように、Dレンジのときには、アクセル操作量θaや車速Vなどに基づいて所定のマップを参照して1速〜4速のギヤ段から目標ギヤ段を選択しながら自動車1を前進走行させるように、Lレンジのときには、1速で自動車1を前進走行させるようにトランスミッション4を制御する。
【0057】
また、Dレンジで走行中にフューエルカットが行われ、且つアクセル操作量θaが所定値付近のときには、ギヤ制御部17は、変速段を低速側に変速(例えば、4速から3速へ変速)させないようにトランスミッション4を制御する。なお、所定値付近とは、運転者が惰性走行を望んでおり、エンジンブレーキの発生を望んでいないであろうと認められる範囲であり、例えば、θath〜θath*50%やθath*70%の操作量範囲などに設定することができる。ギヤ制御部17がこのように制御することにより、運転者はアクセル操作量θaを所定値付近の保持すれば、トランスミッション4の変速段が低速側に変速することでエンジン2の回転抵抗が増加することを回避できるため、燃費を向上させることができる。
【0058】
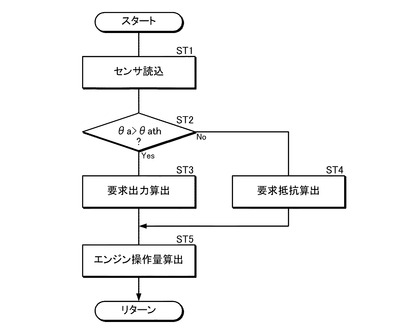
次に、図8を参照して、電子制御ユニット9によるエンジン制御手順について説明する。電子制御ユニット9は、エンジン2が始動すると、以下のエンジン制御を行う。まず、電子制御ユニット9は、各種センサの検出値を読み込み(ステップST1)、検出されたアクセル操作量θaが所定値θathよりも大きいか否かを判定する(ステップST2)。ステップST2の判定でアクセル操作量θaが所定値θathよりも大きい場合(Yes)、運転者はエンジン2による駆動力を要求しているものとして、電子制御ユニット9は、アクセル操作量θaに基づいて要求出力を算出する(ステップST3)。一方、ステップST2の判定でアクセル操作量θaが所定値θath以下である場合(No)、運転者はエンジン2による制動力を要求しているものとして、電子制御ユニット9は、アクセル操作量θaに基づいて要求抵抗を算出する(ステップST4)。その後、電子制御ユニット9は、ステップST3で算出した要求出力またはステップST4で算出した要求抵抗に基づいて、各種エンジン操作量(目標スロットル開度、目標燃料噴射量、点火タイミング、目標EGR開度、目標ギヤ段)を設定してエンジン2を駆動制御し、上記手順を繰り返す。
【0059】
次に、図6および図9を参照して、自動車1がモータ・ジェネレータ3を備える場合の、電子制御ユニット9の構成、および電子制御ユニット9によるエンジン・モータ制御手順について説明する。
【0060】
図6に示すように、電子制御ユニット9は、上記構成に加えて更に分配量設定部18を有するエンジンECU10の他に、モータ制御部20を有するモータECU19を備える。
【0061】
分配量設定部18は、要求出力・抵抗演算部12により算出された要求出力または要求抵抗における、エンジン2およびモータ・ジェネレータ3に発生させるべき量(分配量)を設定する。例えば、分配量設定部18は、フューエルカットを行わないときは、要求出力の高い加速時や高負荷クルーズ時にモータ・ジェネレータ3の出力を大きくしたり、要求出力の低い低負荷クルーズ時にモータ・ジェネレータ3に抵抗を発生(余分エネルギの回生)させたりする。一方、フューエルカットを行うときは、分配量設定部18は、要求抵抗をエンジン2に発生させずに、モータ・ジェネレータ3に発生させるようにする。
【0062】
つまり、自動車1がモータ・ジェネレータ3を備える場合、アクセル操作量θaが所定値θath以下であってフューエルカットを行うときは、分配量設定部18は、モータ・ジェネレータ3を搭載しないエンジン自動車のエンジンブレーキに相当する抵抗を上限としてモータ・ジェネレータ3による回生を行い、アクセル操作量θaが所定値θathに近づくにつれて回生量を減らして惰性走行しやすいようにする。
【0063】
なお、アクセル操作による(ブレーキ操作が行われておらず、アクセル操作量θaを0としたときの)回生ブレーキは、エンジンブレーキ相当を上限とする上記例に限らず、リターダーや排気ブレーキなどと同様の補助ブレーキの一種と考え、例えば制動灯の点灯が不要な2.2m/s2の減速度を上限とすることもできる。このようにすることにより、例えば、モータ・ジェネレータ3の発電能力またはバッテリ容量がそれほど大きくなく、2.2m/s2の減速度で回生量を十分に確保できる場合、ブレーキ操作時における回生量を増加させる必要がなくなり、ブレーキ装置24に回生協調機能を付与する必要がなくなるという効果もある。
【0064】
そして、モータ制御部20は、分配量設定部18により設定された要求出力および要求抵抗を発生させるべく、モータ・ジェネレータ3の駆動/回生を制御する。
【0065】
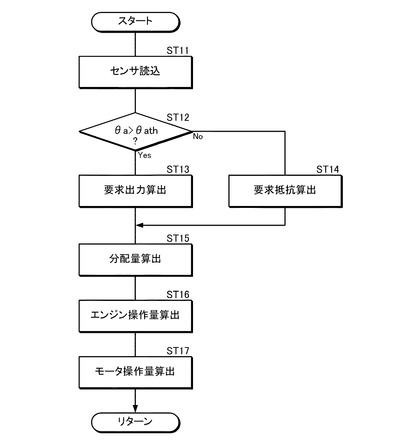
次に、図9を参照して、電子制御ユニット9によるエンジン・モータ制御手順について説明する。なおステップST11〜ST14の処理は上記ステップST1〜ST4と同一であるため、説明を省略する。ステップST13およびST14の後、電子制御ユニット9は、ステップST13で算出した要求出力またはステップST14で算出した要求抵抗に基づいて、エンジン2およびモータ・ジェネレータ3に発生させるべき出力または抵抗の分配量を決定し(ステップST15)、この分配量に基づいて、各種エンジン操作量(目標スロットル開度、目標燃料噴射量、点火タイミング、目標EGR開度、目標ギヤ段)を設定してエンジン2を駆動制御するとともに(ステップST16)、モータ・ジェネレータ3の操作量を設定してモータ・ジェネレータ3を駆動制御し(ステップST17)、上記手順を繰り返す。
【0066】
以上で具体的実施形態の説明を終えるが、本発明は上記実施形態に限定されることなく幅広く変形実施することができる。例えば、上記実施形態では、自動車1が駆動源としてエンジン2を搭載した形態およびモータ・ジェネレータ3をも搭載した(ハイブリッド)形態について説明したが、モータ・ジェネレータ3のみを搭載する(EV)形態とすることもできる。この場合、燃料を使用しないため燃費向上効果は生じないが、アクセル操作で惰性走行時の減速度を調整できるため、操作性向上効果を得ることができる。
【0067】
また、上記実施形態では、変速機構をオートマティックトランスミッションとして説明したが、マニュアルトランスミッションとすることもできる。マニュアルトランスミッションを採用する場合には、シフトレバー21をNポジションに移せば、エンジン2の回転抵抗を受けることのない惰性走行が可能であるが、シフト操作を要するうえ、エンジン2をアイドル状態に維持することによる無駄な燃料消費が発生する。そこで、シフトレバー21が前進走行ギヤ位置にある場合にも、アクセル操作によってEGR量を変化させてエンジン2の回転抵抗を変化させることで、燃費向上と操作性向上とを図ることができる。
【0068】
上記実施形態では、図4に示すような構成によりアクセルペダル装置22を具体化しているが、このような構成の他、アクセルペダル45の回動軸部分(オルガン式では、下端のペダル根元部分、吊り下げ式では、ペダルアームの上端部分)にばね定数の異なるスプリングを設けること等により、アクセル操作量θaが所定値θathのときに反力特性(反力増大率)が変化し、或いは反力が有意に大きくなるようにアクセルペダル装置22を構成してもよい。
【0069】
上記実施形態では、アクセルペダル45の操作に要する踏力は、受動的な反力発生構造により一意に決定されるが、モータ等のアクチュエータを用いてアクセルペダル45の反力増加位置(所定値θath)や反力の増加量を車両特性に応じて任意に設定するようにしてもよい。このような構成としても、燃費向上および操作性向上の効果を得ることができる。
【0070】
この他、各装置や部材の具体的構成や制御手法など、本発明の趣旨を逸脱しない範囲であれば適宜変更可能である。一方、上記実施形態に示した本発明に係るおよび自動車1の各構成要素は、必ずしも全てが必須ではなく、少なくとも本発明の趣旨を逸脱しない限りにおいて適宜取捨選択することが可能である。
【符号の説明】
【0071】
1 自動車
2 エンジン
3 モータ・ジェネレータ
4 トランスミッション
9 電子制御ユニット(駆動制御手段)
16 EGR制御部
22 アクセルペダル装置
31 EGR通路
33 EGRバルブ
45 アクセルペダル
52 アクセルペダルセンサ
θa アクセル操作量
θath 所定値
【技術分野】
【0001】
本発明は、駆動源の出力を0にした空走状態における駆動源の回転抵抗を、アクセル操作量に応じて変化させる車両の駆動制御装置に関する。
【背景技術】
【0002】
自動車の制御において、燃費効率を向上させるために、運転者がアクセルペダルの踏み込みを解除すると、エンジンへの燃料供給を停止(フューエルカット)してエンジン出力を0にして、車両を空走状態にする制御を行うことがある。しかし、空走状態を維持し続けると、エンジンの回転数が低下するため、エンジンストールが起きないように一定値以上のエンジン回転数を保つ必要があることが、特許文献1により知られている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特公昭60−35854号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の発明では、変速機をダウンシフトさせることで必要なエンジン回転数を維持するように制御している。しかし、このような制御によって必要以上に減速されてしまうと、運転者が速度を維持しようとしてアクセルペダルを踏み込むことで、無駄に燃料を消費しかねない。
【0005】
また、必要以上の制動を行わないことが実燃費改善に効果があることを運転者が知っていたとしても、特に、オートマティックトランスミッション(AT)車においては、車両側で制御装置がエンジンブレーキの量を設定してしまうため、運転者はエンジンブレーキの多寡を自ら制御することができず、その意思を車両に反映させることができない。このような課題は、特許文献1の発明を含む従来の技術において解決されていない。
【0006】
本発明は、このような従来技術に含まれる課題を解消するべく案出されたものであり、運転者の意図に沿った空走状態で走行を行い得る車両の駆動制御装置を提供することをその第1の目的とする。
【0007】
また、燃費を向上させるにあたり、走行抵抗を低減すべくエンジンのポンピングロスを減らすために、大量EGR(排出ガス再循環)によって排出ガスを吸気に混ぜることで、インテークマニホールド圧が下がらないように制御することが、特開昭61−14462号公報により知られているが、このような制御を行うと、エンジンブレーキが弱くなるため、操作性の違和感を運転者に与える虞がある。
【0008】
さらに、大量EGRを行うと、インテークマニホールド圧が下がり難くなるため、ブレーキに真空倍力装置を用いている場合には、真空倍力装置に供給される負圧が不足する虞もある。
【0009】
そこで本発明は、このような燃費向上技術と操作性とを両立させるにあたり、運転者が意図したように車両の状態を調整できるようにすることを第2の目的とする。
【課題を解決するための手段】
【0010】
このような課題を解決するために、本発明の一側面によれば、駆動源(2、3)と、前記駆動源の操作に供されるアクセル操作手段(22)と、前記アクセル操作手段の操作量をアクセル操作量(θa)として検出するアクセル検出手段(52)と、前記アクセル操作量に基づいて前記駆動源の出力を制御するとともに、前記駆動源の回転抵抗を制御する駆動制御手段(9)とを備えた車両(1)の駆動制御装置であって、前記駆動制御手段は、前記アクセル操作量が所定値(θath)以下の領域において、前記駆動源の出力を0にするとともに、前記駆動源の回転抵抗を、前記アクセル操作量が前記所定値付近にあるときに最も小さく、前記所定値から0に向かうにつれて増加させることを特徴とする。
【0011】
この構成によれば、駆動源の出力を増加させずに惰性走行(空走)を行いたい場合、運転者はアクセル操作手段の操作により駆動源の回転抵抗を調整できるため、意図に沿った燃費向上走行を行うことができる。これにより、駆動源のエネルギ消費(駆動源がガソリンである場合は燃料消費。駆動源がモータの場合は電力消費。)を抑制する効果を得ることができる。
【0012】
また、本発明の一側面によれば、前記アクセル操作手段は、前記所定値において反力特性が変化するように設けられたことを特徴とする。
【0013】
この構成によれば、駆動源の出力を増加させずに惰性走行(空走)を行いたい場合、運転者は車両の加減速状態などに依らずにアクセル操作部材の反力特性から駆動源の回転抵抗が小さくなるアクセル操作量を認識することができる。そのため、より効果的に駆動源のエネルギ消費を抑制することができる。また操作性の違和感を運転者に与えることも抑制できる。
【0014】
また、本発明の一側面によれば、前記アクセル操作手段は、前記所定値において反力が有意に大きくなるように設けられたことを特徴とする。
【0015】
この構成によれば、駆動源の出力を増加させずに惰性走行(空走)を行いたい場合、運転者はアクセル操作部材を所定値の操作量の位置に容易に保持できるため、駆動源の出力を0に保持するとともに回転抵抗が最も小さい状態をより長くすることができる。
【0016】
また、本発明の一側面によれば、前記駆動源は、内燃機関(2)と、当該内燃機関の排気ガスの一部を排気通路から取り出して吸気通路に還流させるEGR手段(31、33)とを含み、前記駆動制御手段は、前記アクセル操作量が前記所定値のときに、前記EGR手段に還流させる排気ガスの量を最も大きくすることを特徴とする。
【0017】
この構成によれば、アクセル操作量が所定値付近のときに、惰性走行時のポンピングロスを低減することができ、燃費向上を図ることができる。
【0018】
また、本発明の一側面によれば、前記駆動制御手段は、前記アクセル操作量が0のときに、前記EGR手段による排気ガスの還流を遮断することを特徴とする。
【0019】
この構成によれば、運転者がアクセルペダルの踏込を解除したときは、EGRによる還流が遮断されることで、内燃機関の回転抵抗を高めてエンジンブレーキによる車両の減速度を確保できるため、アクセル操作性を向上させ得るとともに、ブレーキが真空倍力装置を利用する場合には、ブレーキ側に供給される内燃機関からの負圧を確保することができるため、ブレーキ操作性をも向上させることができる。
【0020】
また、本発明の一側面によれば、前記駆動制御手段は、前記車両が停車中の場合、前記アクセル操作量が0から前記所定値に向かうにつれて前記内燃機関のアイドル回転数を増加させることを特徴とする。
【0021】
この構成によれば、車両が停車中には、アクセル操作量が所定値以下の領域においても、アイドル回転数を変化させることで、運転者のアクセル操作に基づいて、燃費性能向上とクリープ力の増加による発進時性能向上とを両立させることができる。
【0022】
また、本発明の一側面によれば、前記駆動源に付設され、前記車両の走行状態に基づいて前記駆動制御手段によってその変速段または変速比が制御される変速機構(4)を更に備え、前記駆動制御手段は、前記車両の状態に応じて、前記アクセル操作量が前記所定値付近のときに前記変速機構の変速段または変速比を低速側に変速させないことを特徴とする。
【0023】
この構成によれば、アクセル操作量が所定値付近のときに、変速機構の変速段または変速比が低速側に変速することで駆動源の回転抵抗が増加することを回避できるため、運転者が維持しやすいアクセル操作量の位置で燃費を向上させることができる。なお、車両の状態によっては、変速機構の変速段または変速比を低速側に変速させることもあり得る。
【0024】
また、本発明の一側面によれば、前記駆動源は、電力供給により駆動されるとともに強制回転により電力を回生するモータ(3)を含み、前記駆動制御手段は、前記モータによる回生量を、前記アクセル操作量が前記所定値から0に向かうにつれて増加させることを特徴とする。
【0025】
この構成によれば、アクセル操作量が所定値付近のときには、回生による制動力を最小限にすることができるため、惰性走行性能を確保することができるとともに、アクセル操作量が0に向かうにつれて回生量を増加させて車両の減速度を確保することもできるため、操作性を担保しつつ、アクセル操作に基づく燃費向上走行を実現することができる。
【図面の簡単な説明】
【0026】
【図1】実施形態に係る自動車の駆動系の要部系統図
【図2】図1に示すエンジンの吸排気系の要部系統図
【図3】自動車に装備されるブレーキ装置の概略構成図
【図4】図1にアクセルペダル装置の概略構成図
【図5】アクセル操作量と踏込反力との関係を示すグラフ
【図6】図1に示す電子制御ユニットの機能ブロック図
【図7】アクセル操作量と要求出力および要求抵抗との関係を示すグラフ
【図8】図6に示す電子制御ユニットによるエンジン制御のフローチャート
【図9】図6に示す電子制御ユニットによるエンジン・モータ制御のフローチャート
【発明を実施するための形態】
【0027】
以下、図面を参照しながら、本発明を一実施形態について、図面を参照して詳細に説明する。
【0028】
先ず、図1を参照して、実施形態に係る自動車1の概略構成について説明する。自動車1は、駆動源としてガソリンエンジン(以下、単にエンジン2と記す。)を搭載しており、エンジン2の出力をオートマティックトランスミッション(以下、単にトランスミッション4と記す。)および前輪車軸5介して駆動輪に伝達する。なお、図示例では、自動車1は前輪6fを駆動輪とする前輪駆動車であるが、後輪6rを駆動輪とする後輪駆動車または前後両車輪6を駆動輪とする四輪駆動車とすることもできる。以下、トランスミッション4については、前進4段、後退1段の多段変速式として説明するが、連続可変トランスミッション(CVT)を用いることもできる。
【0029】
自動車1には、マイクロコンピュータやROM、RAM、周辺回路、入出力インタフェース、各種ドライバ等から構成された電子制御ユニット9の他、トランスミッション4のシフトレンジの変更操作に供されるシフトレバー21や、シフトレバー21の操作位置(レンジ)を検出するシフトレンジセンサ51、エンジン2の操作に供されるアクセルペダル装置22、アクセルペダル装置22の操作量をアクセル操作量θaとして検出するアクセルペダルセンサ52、自動車1の制動操作に供されるブレーキペダル23、ブレーキペダル23の操作に応じて各車輪6に制動力を発生させるブレーキ装置24(図3参照)、車速Vを検出する車速センサ53などが設けられている。
【0030】
なお、自動車1は、駆動源としてエンジン2の代わりに、またはエンジン2とともに、想像線で示すモータ・ジェネレータ3を搭載する電気自動車またはハイブリッド車であってもよい。この場合、モータ・ジェネレータ3は、車両走行用の電動機と回生用の発電機とを兼ねたものであり、二次電池であるバッテリ7からの電力供給とバッテリ7に対する電力供給(充電)とをインバータ8によって制御され、減速時に減速エネルギを電力に変換回生して回生制動を発生する回生制動手段として機能する。そして、ブレーキ装置24には、運転者によるブレーキペダル23の操作に応じたブレーキ液圧とは独立して、所望にブレーキ液圧を制御できるブレーキ・バイ・ワイヤ形式が採用され、ブレーキ装置24と回生ブレーキとに制動力を分配する回生協調制御が行われる。
【0031】
電子制御ユニット9は、エンジン2(および/またはモータ・ジェネレータ3)の出力制御の他、エンジン2の出力を略0にして自動車1の慣性力で走行を続ける空走状態でのエンジン2の回転抵抗の制御や、シフトレバー21の操作位置や車速V、アクセル操作量θaなどに応じてトランスミッション4のギヤ段(変速比)の制御を行う。また、自動車1がハイブリッド自動車または電気自動車である場合、電子制御ユニット9はモータ・ジェネレータ3の駆動/回生も制御する。
【0032】
図2に示すように、エンジン2は、その機械的な構成自体は周知のものと何ら変わるところはなく、過給圧可変機構付きターボチャージャ25を備えるものであり、ターボチャージャ25のコンプレッサ26側に吸気通路28が連結され、ターボチャージャ25のタービン27側に排気通路29が連結されている。そして吸気通路28の上流端に図示しないエアクリーナが接続され、吸気通路28の適所に燃焼室に流入する新気の流量を調節するためのスロットルバルブ30が設けられている。
【0033】
吸気通路28におけるスロットルバルブ30の下流側部分と、排気通路29における燃焼室とタービン27との間の部分とは、排出ガス再循環通路(以下、EGR通路31と記す。)によって互いに接続されている。このEGR通路31は、排気通路29を流通する排気ガスを吸気通路28へ還流させるものであり、EGRクーラー32を通過させることで排気ガスを冷却するとともに、その下流側に設けられたEGRバルブ33によって燃焼室に還流させる排気ガスの量(EGR量)を調節する。
【0034】
エンジン2のシリンダヘッドには、その先端を燃焼室に臨ませた点火コイル34が設けられている。また、吸気通路28の下流端付近には、電子制御式の燃料噴射弁35が燃焼室に向けて設けられている。燃料噴射弁35には、図示しないクランク軸にて駆動されて燃料タンクから燃料を汲み上げる燃料ポンプから燃料が供給される。
【0035】
これらのターボチャージャ25の過給圧可変機構、スロットルバルブ30およびEGRバルブ33、点火コイル34、燃料噴射弁35・・・等は、電子制御ユニット9からの制御信号によって作動するように構成されている(図5参照)。
【0036】
次に、図3を参照して、自動車1に設けられたブレーキ装置24について説明する。ブレーキペダル23は車体に回動自在に支持されており、運転者の制動操作に応じて円弧運動を行う。ブレーキペダル23にはその円弧運動を略直線運動に変換するロッド36の一端が連結されており、ロッド36の他端は、真空倍力装置37を介して直列的に配設されたマスターシリンダ38の第1ピストン38aに対し、運転者の制動操作に応じて押し込むように係合している。真空倍力装置37は、吸気通路28におけるスロットルバルブ30の下流側と連通し、エンジン2の吸気により発生する負圧を利用してマスターシリンダ38を押し込む力を補助する。
【0037】
マスターシリンダ38における第1ピストン38aのロッド36と相反する側には、第2ピストン38bが直列的に配設されており、各ピストン38a・38bはそれぞれロッド36側にばね付勢されている。マスターシリンダ38には、ブレーキ液が不足した際にブレーキ液を補充するためのリザーブタンク39が設けられており、リザーブタンク39と連通する各油路40a・40bとの間をシールするための公知構造のシール部材が各ピストン38a・38bの適所に設けられている。そして、マスターシリンダ38の筒内には、第1ピストン38aと第2ピストン38bとの間に第1液室41aが形成され、第2ピストン38bの第1ピストン38aと相反する側に第2液室41bが形成される。
【0038】
前輪6f及び後輪6rの各車輪6には、摩擦制動を行う摩擦制動手段として、車輪6(前輪6f・後輪6r)と一体のディスク42a及びホイールシリンダ42bを備えるキャリパにより構成される公知のディスクブレーキ42が設けられている。ホイールシリンダ42bには、公知のブレーキ配管を介してモジュレータ43が接続されている。
【0039】
マスターシリンダ38の第1液室41aは油路40cを介して、第2液室41bは油路40dを介して、それぞれモジュレータ43と連通している。さらに、モジュレータ43は、4つのホイールシリンダ42bに連通するように配管されている。なお、モジュレータ43は、制動制御ユニット43hと一体に形成され、ブレーキ時の車輪ロックを防ぐABS、加速時などの車輪空転を防ぐTCS(トラクションコントロールシステム)、旋回時のヨーモーメントを制御して横滑りを抑制する横滑り抑制制御、緊急時に所定のブレーキ圧を自動的にホイールシリンダ42bに作用させるブレーキアシスト機能、衝突回避・レーンキープなどのための自動ブレーキ機能等を備えた車両挙動安定化制御システムに供される公知のものであって良い。
【0040】
モジュレータ43は、前輪6fの各ホイールシリンダ42bに対応する第1系統43aと、後輪6rの各ホイールシリンダ42bに対応する第2系統43bと、両系統43a・43bに接続するポンプモータ43cとを備え、各系統43a・43bにはそれぞれ、常閉型のアウトバルブ43dや、常開型のインバルブ43e、レギュレータバルブ43f(ともに電磁弁)、低圧リザーバ43gなどが設けられている。これらのポンプモータ43c、アウトバルブ43d、インバルブ43eおよびレギュレータバルブ43f(ブレーキアクチュエータ)は、制動制御ユニット43hにより駆動制御される。また、モジュレータ43は、ホイールシリンダ42bに加わるブレーキ液圧を検出し得る位置に、各ホイールシリンダ42bに対してブレーキ液圧センサ43iを備えている。
【0041】
このように構成されたブレーキ装置24は、運転者がブレーキペダル23を操作すると、操作量に応じたブレーキ液圧がモジュレータ43を介して前後輪の各ホイールシリンダ42bに供給されて制動力を発生させるとともに、制動制御ユニット43hがポンプモータ43cを駆動することにより、ポンプモータ43cによって加圧されたブレーキ液が常開型のインバルブ43eを通してホイールシリンダ42bへ送られ、ブレーキ操作に応じた制動力とは独立して補助制動力を発生させる一方、制動制御ユニット43hが常閉型のアウトバルブ43dを開弁駆動するとともに常開型のインバルブ43eを閉弁駆動することにより、ブレーキ液が低圧リザーバ43g側へ排出され、ホイールシリンダ42bに発生する制動力を低減することができる。
【0042】
次に、図4を参照して、アクセルペダル装置22について説明する。図4(A)に示すように、アクセルペダル45は、その下端が車体に回動自在に支持されるとともにその背面にペダルアーム46が摺接している。ペダルアーム46は、図示しないリターンスプリングによって常時略同一のトルクで図中では反時計回り方向に付勢されており、アクセルペダル45を常時起立側に付勢する。
【0043】
アクセルペダル45が(A)に示す原位置にあるときには、ペダルアーム46の遊端(下端)がアクセルペダル45の下部に摺接しており、アクセルペダル45が踏み込まれると、ペダルアーム46を比較的小さな変動角で回動させる。アクセル操作が所定の踏込量(所定値θath)に達すると、(B)に示すように、ペダルアーム46の中間位置にアクセルペダル45の遊端(上端)が接触し、この踏込量よりもさらにアクセルペダル45が踏み込まれると、(C)に示すように、アクセルペダル45の遊端がペダルアーム46の中間部分を押しながら比較的大きな変動角でペダルアーム46を回動させる。
【0044】
アクセルペダル装置22がこのように構成されたことにより、アクセルペダル45の踏込反力Fは、図5に示すように、アクセル操作量θaが0から所定値θathまでの操作量領域において、アクセル操作量θaに対して比較的小さな増大量をもって増大し、アクセル操作量θaが所定値θathのときに急激に立ち上がり、アクセル操作量θaが所定値θathよりも大きな操作量領域において、アクセル操作量θaに対して比較的大きな増大量をもって増大する。
【0045】
このように、所定値θathにおいて踏込反力Fが有意に大きくなるようにアクセルペダル45が設けられたことにより、所定値θathに反力の壁が生じ、運転者がアクセルペダル45を所定値θathに保持しやすくなっている。また、所定値θathを境にして反力特性(アクセル操作量θaに対する踏込反力Fの増大量)が変化することにより、運転者がアクセル操作量θaを認識しやすくなっている。また、アクセルペダル45の操作に要する踏力が、受動的な反力発生構造により一意に決定され、アクセルペダル45の踏込反力Fが有意に大きくなる位置(踏込量)が、積極的な加速も減速もしない位置と定められることで、車両制御上、運転者の意思を汲み取りやすくなり、その結果、運転者の意図しない制御となることが防止される。
【0046】
図6に示すように、電子制御ユニット9は、フューエルカット判定部11、要求出力・抵抗演算部12、スロットル制御部13、燃料噴射制御部14、点火制御部15、EGR制御部16、ギヤ制御部17を有するエンジンECU10を備えている。なお、自動車1がモータ・ジェネレータ3を備える場合、電子制御ユニット9は、エンジンECU10の他にモータECU19を備える。ここでは、まず電子制御ユニット9がエンジンECU10のみを備える場合について説明し、その後、モータECU19をも備える場合について説明する。
【0047】
フューエルカット判定部11は、アクセルペダルセンサ52の検出結果(アクセル操作量θa)および車速センサ53の検出結果(車速V)、ならびにトランスミッション4のギヤ比などに基づいて、エンジン2への燃料供給を停止するフューエルカットを行うか否かを判定する。ここでは、アクセル操作量θaが所定値θath以下であり、且つ車速Vが所定値以上である場合に、フューエルカットを行うように判定し、それ以外の場合にはフューエルカットを行わないように判定する。なお、車速Vおよびギヤ比の代わりにクランク角センサより求めたエンジン回転数などを用いてもよい。
【0048】
要求出力・抵抗演算部12は、アクセルペダルセンサ52の検出結果に基づいて、要求出力または要求抵抗を算出する。ここでは、図7に示すように、アクセル操作量θaが所定値θath未満である場合、駆動源による抵抗が要求されているものとして、アクセル操作量θaに応じた要求抵抗を算出し、アクセル操作量θaが所定値θathよりも大きい場合、駆動源による出力が要求されているものとして、アクセル操作量θaに応じた要求出力を算出する。
【0049】
スロットル制御部13は、アクセル操作量θaが所定値θathよりも大きく、フューエルカットを行わないときは、要求出力に比例する目標スロットル開度(図7参照)を設定し、スロットルバルブ30を駆動制御する。一方、アクセル操作量θaが所定値θath以下であるが、フューエルカットを行わないとき、およびフューエルカットを行うときは、スロットル制御部13はアクセル操作量θaに関わらず目標スロットル開度を0に設定してスロットルバルブ30を閉弁する。
【0050】
燃料噴射制御部14は、アクセル操作量θaが所定値θath以下であり、フューエルカットを行うときは、燃料噴射制御部14はアクセル操作量θaに関わらず目標燃料噴射量を0に設定してエンジン2への燃料供給を停止する。
【0051】
一方、アクセル操作量θaが所定値θathよりも大きく、フューエルカットを行わないときは、燃料噴射制御部14は、要求出力に応じた目標燃料噴射量を設定し、クランク角センサにより検出される所定のタイミングにて目標燃料噴射量を噴射するように燃料噴射弁35を制御する。他方、アクセル操作量θaが所定値θath以下であるが、フューエルカットを行わないときは、エンジン回転数が自律回転できなくなることを避けるため、アイドル用の目標燃料噴射量を設定して燃料噴射弁35を駆動制御する。
【0052】
ここで、アイドル用の目標燃料噴射量は、アクセル操作量θaが所定値θath以下の操作量領域においても、アクセル操作量θaが大きいほど(所定値θathに向かうにつれて)大きくなるように設定するとよい。例えば、アクセル操作量θaが0のときは、アイドル回転数が600rpmになるような目標燃料噴射量に設定し、アクセル操作量θaが所定値θathのときにアイドル回転数が800rpmになるように、アクセル操作量θaに応じて増大するように目標燃料噴射量を設定する。このようにすることにより、アクセル操作量θaが所定値θathに近づくにつれて、クリープ量を大きくし、停車時や超低速走行時に自動車1を円滑に発進させることができる。つまり、運転者は、アクセル操作によって燃費向上と発進時性能の向上との両立を実現できる。
【0053】
点火制御部15は、フューエルカットを行わないときは、目標点火タイミングを設定し、クランク角センサにより検出されるクランク角に基づいて目標点火タイミングにて点火プラグを点火させ、燃料に着火する。一方、フューエルカットを行わないときは、点火制御部15は点火プラグの点火を停止する。
【0054】
EGR制御部16は、フューエルカットを行わないときは、低負荷時などの所定の条件に応じて目標EGR開度を設定してEGRバルブ33を開弁させ、排気ガスを吸気通路28へ還流させる。これにより、通常走行時においても燃費を向上させることができる。一方、フューエルカットを行うときは、惰性走行によりクランクシャフトを強制的に回転させる際のエンジン2の回転抵抗を調整すべく、EGR制御部16は、要求抵抗(アクセル操作量θa)に応じて目標EGR開度を設定してEGRバルブ33を開弁する。具体的には、アクセル操作量θaが0のときに、排気ガスの還流を遮断してEGR量を0にすべく、目標EGR開度を0%(全閉)とし、アクセル操作量θaが所定値θathのときに、EGR量を最も大きくすべく、目標EGR開度を100%(全開)とし、アクセル操作量θaが0から所定値θathまでの間では、アクセル操作量θaに比例して大きくなるように目標EGR開度を設定してEGRバルブ33を制御する。
【0055】
EGR制御部16がこのようにEGRバルブ33を制御することにより、運転者は、走行中にエンジンブレーキを大きくしたい場合には、アクセル操作量θaを0にしてエンジン2のポンピングロス(エンジンブレーキ)を大きくし、惰性走行を行って燃費を向上させたい場合には、アクセルペダル45を所定値θathまで踏み込むことで、エンジンブレーキを最小限にすることができ、意図した通りの走行状態を作り出すことができる。また、上記したようにこのように踏込反力Fが所定値θathにおいて有意に大きくなるように設定され、運転者がアクセルペダル45を所定値θathに保持しやすくなっているため、エンジン出力を0に保持するとともにエンジンブレーキが最小限となる状態をより長くすることができる。さらに、運転者がブレーキ操作を行うときには、アクセル操作量θaが0になるため、ポンピングロスが大きく吸気通路28に負圧が発生した状態となって真空倍力装置37の負圧が確保され、ブレーキペダル23の踏込力が適正に補助されることになり、ブレーキ操作性の向上も図られる。
【0056】
ギヤ制御部17は、シフトレンジセンサ51が検出したシフトレンジに応じてトランスミッション4のギヤ段を変更するシフト制御を行う。例えば、シフトレンジとしては、P(パーキング)レンジ、R(リバース)レンジ、N(ニュートラル)レンジ、D(ドライブ)レンジ、L(ロー)レンジがあり、ギヤ制御部17は、トランスミッション4に接続する油圧回路に設けられた図示しないシフトソレノイドバルブを開閉駆動することにより、トランスミッション4を制御する。ギヤ制御部17は、PレンジおよびNレンジのときには、駆動力の伝達を遮断するように、また、Rレンジのときには、自動車1を後退走行させるように、Dレンジのときには、アクセル操作量θaや車速Vなどに基づいて所定のマップを参照して1速〜4速のギヤ段から目標ギヤ段を選択しながら自動車1を前進走行させるように、Lレンジのときには、1速で自動車1を前進走行させるようにトランスミッション4を制御する。
【0057】
また、Dレンジで走行中にフューエルカットが行われ、且つアクセル操作量θaが所定値付近のときには、ギヤ制御部17は、変速段を低速側に変速(例えば、4速から3速へ変速)させないようにトランスミッション4を制御する。なお、所定値付近とは、運転者が惰性走行を望んでおり、エンジンブレーキの発生を望んでいないであろうと認められる範囲であり、例えば、θath〜θath*50%やθath*70%の操作量範囲などに設定することができる。ギヤ制御部17がこのように制御することにより、運転者はアクセル操作量θaを所定値付近の保持すれば、トランスミッション4の変速段が低速側に変速することでエンジン2の回転抵抗が増加することを回避できるため、燃費を向上させることができる。
【0058】
次に、図8を参照して、電子制御ユニット9によるエンジン制御手順について説明する。電子制御ユニット9は、エンジン2が始動すると、以下のエンジン制御を行う。まず、電子制御ユニット9は、各種センサの検出値を読み込み(ステップST1)、検出されたアクセル操作量θaが所定値θathよりも大きいか否かを判定する(ステップST2)。ステップST2の判定でアクセル操作量θaが所定値θathよりも大きい場合(Yes)、運転者はエンジン2による駆動力を要求しているものとして、電子制御ユニット9は、アクセル操作量θaに基づいて要求出力を算出する(ステップST3)。一方、ステップST2の判定でアクセル操作量θaが所定値θath以下である場合(No)、運転者はエンジン2による制動力を要求しているものとして、電子制御ユニット9は、アクセル操作量θaに基づいて要求抵抗を算出する(ステップST4)。その後、電子制御ユニット9は、ステップST3で算出した要求出力またはステップST4で算出した要求抵抗に基づいて、各種エンジン操作量(目標スロットル開度、目標燃料噴射量、点火タイミング、目標EGR開度、目標ギヤ段)を設定してエンジン2を駆動制御し、上記手順を繰り返す。
【0059】
次に、図6および図9を参照して、自動車1がモータ・ジェネレータ3を備える場合の、電子制御ユニット9の構成、および電子制御ユニット9によるエンジン・モータ制御手順について説明する。
【0060】
図6に示すように、電子制御ユニット9は、上記構成に加えて更に分配量設定部18を有するエンジンECU10の他に、モータ制御部20を有するモータECU19を備える。
【0061】
分配量設定部18は、要求出力・抵抗演算部12により算出された要求出力または要求抵抗における、エンジン2およびモータ・ジェネレータ3に発生させるべき量(分配量)を設定する。例えば、分配量設定部18は、フューエルカットを行わないときは、要求出力の高い加速時や高負荷クルーズ時にモータ・ジェネレータ3の出力を大きくしたり、要求出力の低い低負荷クルーズ時にモータ・ジェネレータ3に抵抗を発生(余分エネルギの回生)させたりする。一方、フューエルカットを行うときは、分配量設定部18は、要求抵抗をエンジン2に発生させずに、モータ・ジェネレータ3に発生させるようにする。
【0062】
つまり、自動車1がモータ・ジェネレータ3を備える場合、アクセル操作量θaが所定値θath以下であってフューエルカットを行うときは、分配量設定部18は、モータ・ジェネレータ3を搭載しないエンジン自動車のエンジンブレーキに相当する抵抗を上限としてモータ・ジェネレータ3による回生を行い、アクセル操作量θaが所定値θathに近づくにつれて回生量を減らして惰性走行しやすいようにする。
【0063】
なお、アクセル操作による(ブレーキ操作が行われておらず、アクセル操作量θaを0としたときの)回生ブレーキは、エンジンブレーキ相当を上限とする上記例に限らず、リターダーや排気ブレーキなどと同様の補助ブレーキの一種と考え、例えば制動灯の点灯が不要な2.2m/s2の減速度を上限とすることもできる。このようにすることにより、例えば、モータ・ジェネレータ3の発電能力またはバッテリ容量がそれほど大きくなく、2.2m/s2の減速度で回生量を十分に確保できる場合、ブレーキ操作時における回生量を増加させる必要がなくなり、ブレーキ装置24に回生協調機能を付与する必要がなくなるという効果もある。
【0064】
そして、モータ制御部20は、分配量設定部18により設定された要求出力および要求抵抗を発生させるべく、モータ・ジェネレータ3の駆動/回生を制御する。
【0065】
次に、図9を参照して、電子制御ユニット9によるエンジン・モータ制御手順について説明する。なおステップST11〜ST14の処理は上記ステップST1〜ST4と同一であるため、説明を省略する。ステップST13およびST14の後、電子制御ユニット9は、ステップST13で算出した要求出力またはステップST14で算出した要求抵抗に基づいて、エンジン2およびモータ・ジェネレータ3に発生させるべき出力または抵抗の分配量を決定し(ステップST15)、この分配量に基づいて、各種エンジン操作量(目標スロットル開度、目標燃料噴射量、点火タイミング、目標EGR開度、目標ギヤ段)を設定してエンジン2を駆動制御するとともに(ステップST16)、モータ・ジェネレータ3の操作量を設定してモータ・ジェネレータ3を駆動制御し(ステップST17)、上記手順を繰り返す。
【0066】
以上で具体的実施形態の説明を終えるが、本発明は上記実施形態に限定されることなく幅広く変形実施することができる。例えば、上記実施形態では、自動車1が駆動源としてエンジン2を搭載した形態およびモータ・ジェネレータ3をも搭載した(ハイブリッド)形態について説明したが、モータ・ジェネレータ3のみを搭載する(EV)形態とすることもできる。この場合、燃料を使用しないため燃費向上効果は生じないが、アクセル操作で惰性走行時の減速度を調整できるため、操作性向上効果を得ることができる。
【0067】
また、上記実施形態では、変速機構をオートマティックトランスミッションとして説明したが、マニュアルトランスミッションとすることもできる。マニュアルトランスミッションを採用する場合には、シフトレバー21をNポジションに移せば、エンジン2の回転抵抗を受けることのない惰性走行が可能であるが、シフト操作を要するうえ、エンジン2をアイドル状態に維持することによる無駄な燃料消費が発生する。そこで、シフトレバー21が前進走行ギヤ位置にある場合にも、アクセル操作によってEGR量を変化させてエンジン2の回転抵抗を変化させることで、燃費向上と操作性向上とを図ることができる。
【0068】
上記実施形態では、図4に示すような構成によりアクセルペダル装置22を具体化しているが、このような構成の他、アクセルペダル45の回動軸部分(オルガン式では、下端のペダル根元部分、吊り下げ式では、ペダルアームの上端部分)にばね定数の異なるスプリングを設けること等により、アクセル操作量θaが所定値θathのときに反力特性(反力増大率)が変化し、或いは反力が有意に大きくなるようにアクセルペダル装置22を構成してもよい。
【0069】
上記実施形態では、アクセルペダル45の操作に要する踏力は、受動的な反力発生構造により一意に決定されるが、モータ等のアクチュエータを用いてアクセルペダル45の反力増加位置(所定値θath)や反力の増加量を車両特性に応じて任意に設定するようにしてもよい。このような構成としても、燃費向上および操作性向上の効果を得ることができる。
【0070】
この他、各装置や部材の具体的構成や制御手法など、本発明の趣旨を逸脱しない範囲であれば適宜変更可能である。一方、上記実施形態に示した本発明に係るおよび自動車1の各構成要素は、必ずしも全てが必須ではなく、少なくとも本発明の趣旨を逸脱しない限りにおいて適宜取捨選択することが可能である。
【符号の説明】
【0071】
1 自動車
2 エンジン
3 モータ・ジェネレータ
4 トランスミッション
9 電子制御ユニット(駆動制御手段)
16 EGR制御部
22 アクセルペダル装置
31 EGR通路
33 EGRバルブ
45 アクセルペダル
52 アクセルペダルセンサ
θa アクセル操作量
θath 所定値
【特許請求の範囲】
【請求項1】
駆動源と、
前記駆動源の操作に供されるアクセル操作手段と、
前記アクセル操作手段の操作量をアクセル操作量として検出するアクセル検出手段と、
前記アクセル操作量に基づいて前記駆動源の出力を制御するとともに、前記駆動源の回転抵抗を制御する駆動制御手段と
を備えた車両の駆動制御装置であって、
前記駆動制御手段は、前記アクセル操作量が所定値以下の領域において、前記駆動源の出力を0にするとともに、前記駆動源の回転抵抗を、前記アクセル操作量が前記所定値付近にあるときに最も小さく、前記所定値から0に向かうにつれて増加させることを特徴とする車両の駆動制御装置。
【請求項2】
前記アクセル操作手段は、前記所定値において反力特性が変化するように設けられたことを特徴とする、請求項1に記載の車両の駆動制御装置。
【請求項3】
前記アクセル操作手段は、前記所定値において反力が有意に大きくなるように設けられたことを特徴とする、請求項1または請求項2に記載の車両の駆動制御装置。
【請求項4】
前記駆動源は、内燃機関と、当該内燃機関の排気ガスの一部を排気通路から取り出して吸気通路に還流させるEGR手段とを含み、
前記駆動制御手段は、前記アクセル操作量が前記所定値のときに、前記EGR手段に還流させる排気ガスの量を最も大きくすることを特徴とする、請求項1〜請求項3のいずれか一項に記載の車両の駆動制御装置。
【請求項5】
前記駆動制御手段は、前記アクセル操作量が0のときに、前記EGR手段による排気ガスの還流を遮断することを特徴とする、請求項4に記載の車両の駆動制御装置。
【請求項6】
前記駆動制御手段は、前記車両が停車中の場合、前記アクセル操作量が0から前記所定値に向かうにつれて前記内燃機関のアイドル回転数を増加させることを特徴とする、請求項4または請求項5に記載の車両の駆動制御装置。
【請求項7】
前記駆動源に付設され、前記車両の走行状態に基づいて前記駆動制御手段によってその変速段または変速比が制御される変速機構を更に備え、
前記駆動制御手段は、前記車両の状態に応じて、前記アクセル操作量が前記所定値付近のときに前記変速機構の変速段または変速比を低速側に変速させないことを特徴とする、請求項1〜請求項6のいずれか一項に記載の車両の駆動制御装置。
【請求項8】
前記駆動源は、電力供給により駆動されるとともに強制回転により電力を回生するモータを含み、
前記駆動制御手段は、前記モータによる回生量を、前記アクセル操作量が前記所定値から0に向かうにつれて増加させることを特徴とする、請求項1〜請求項7のいずれか一項に記載の車両の駆動制御装置。
【請求項1】
駆動源と、
前記駆動源の操作に供されるアクセル操作手段と、
前記アクセル操作手段の操作量をアクセル操作量として検出するアクセル検出手段と、
前記アクセル操作量に基づいて前記駆動源の出力を制御するとともに、前記駆動源の回転抵抗を制御する駆動制御手段と
を備えた車両の駆動制御装置であって、
前記駆動制御手段は、前記アクセル操作量が所定値以下の領域において、前記駆動源の出力を0にするとともに、前記駆動源の回転抵抗を、前記アクセル操作量が前記所定値付近にあるときに最も小さく、前記所定値から0に向かうにつれて増加させることを特徴とする車両の駆動制御装置。
【請求項2】
前記アクセル操作手段は、前記所定値において反力特性が変化するように設けられたことを特徴とする、請求項1に記載の車両の駆動制御装置。
【請求項3】
前記アクセル操作手段は、前記所定値において反力が有意に大きくなるように設けられたことを特徴とする、請求項1または請求項2に記載の車両の駆動制御装置。
【請求項4】
前記駆動源は、内燃機関と、当該内燃機関の排気ガスの一部を排気通路から取り出して吸気通路に還流させるEGR手段とを含み、
前記駆動制御手段は、前記アクセル操作量が前記所定値のときに、前記EGR手段に還流させる排気ガスの量を最も大きくすることを特徴とする、請求項1〜請求項3のいずれか一項に記載の車両の駆動制御装置。
【請求項5】
前記駆動制御手段は、前記アクセル操作量が0のときに、前記EGR手段による排気ガスの還流を遮断することを特徴とする、請求項4に記載の車両の駆動制御装置。
【請求項6】
前記駆動制御手段は、前記車両が停車中の場合、前記アクセル操作量が0から前記所定値に向かうにつれて前記内燃機関のアイドル回転数を増加させることを特徴とする、請求項4または請求項5に記載の車両の駆動制御装置。
【請求項7】
前記駆動源に付設され、前記車両の走行状態に基づいて前記駆動制御手段によってその変速段または変速比が制御される変速機構を更に備え、
前記駆動制御手段は、前記車両の状態に応じて、前記アクセル操作量が前記所定値付近のときに前記変速機構の変速段または変速比を低速側に変速させないことを特徴とする、請求項1〜請求項6のいずれか一項に記載の車両の駆動制御装置。
【請求項8】
前記駆動源は、電力供給により駆動されるとともに強制回転により電力を回生するモータを含み、
前記駆動制御手段は、前記モータによる回生量を、前記アクセル操作量が前記所定値から0に向かうにつれて増加させることを特徴とする、請求項1〜請求項7のいずれか一項に記載の車両の駆動制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2013−57252(P2013−57252A)
【公開日】平成25年3月28日(2013.3.28)
【国際特許分類】
【出願番号】特願2011−194608(P2011−194608)
【出願日】平成23年9月7日(2011.9.7)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
【公開日】平成25年3月28日(2013.3.28)
【国際特許分類】
【出願日】平成23年9月7日(2011.9.7)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
[ Back to top ]