
車両の駆動力制御装置
【課題】旋回性能と加減速性能とを両立させることができるように駆動力を制御する装置を提供する。
【解決手段】運転者の加減速操作に基づいて求められる要求駆動力を、操舵に基づいて求められる補正駆動力によって補正して駆動力を求める車両の駆動力制御装置において、前記操舵による旋回要求の度合いを検出する旋回要求検出手段(ステップS3,S4,S11)と、前記旋回要求の度合いに基づいて、前記補正駆動力による駆動力の補正を制限する駆動力補正制限手段(ステップS12,S13,S14)とを備えている。操舵に基づく駆動力の補正を、旋回要求の度合いに応じて変化させるので、旋回特性と加減速特性とを良好な状態に設定できる。
【解決手段】運転者の加減速操作に基づいて求められる要求駆動力を、操舵に基づいて求められる補正駆動力によって補正して駆動力を求める車両の駆動力制御装置において、前記操舵による旋回要求の度合いを検出する旋回要求検出手段(ステップS3,S4,S11)と、前記旋回要求の度合いに基づいて、前記補正駆動力による駆動力の補正を制限する駆動力補正制限手段(ステップS12,S13,S14)とを備えている。操舵に基づく駆動力の補正を、旋回要求の度合いに応じて変化させるので、旋回特性と加減速特性とを良好な状態に設定できる。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、車両の駆動力を制御する装置に関し、特にステア特性に関連して駆動力を制御し、また加減速要求に基づいて駆動力を制御する装置に関するものである。
【背景技術】
【0002】
車両の加減速は、基本的には、アクセルペダルを踏み込み、あるいは踏み込んだアクセルペダルを戻すことによりエンジンなどの駆動力源の出力および駆動力を増減して行う。一方、タイヤが路面と接触する接地点は、車体の重心から外れているから、旋回時には駆動トルクの変化に応じてタイヤでの横力が変化し、また車体に作用するヨーモーメントが変化する。そのため、駆動トルクに応じて旋回性能(旋回特性)が変化する。
【0003】
例えば、特許文献1に記載された装置は、車両の挙動が不安定になったことが検出された場合には、エンジン出力を抑制して車両の挙動を安定させ、これとは反対にドライバが加速を意図して操作を行っている場合には、車両挙動安定化のための制動制御を行わないように構成されている。また、特許文献2には、理想的な旋回半径となるように、時々刻々変化する車両周囲の環境に応じて車軸トルクを制御してスタビリティファクタを安定化させるように構成された装置が記載されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−271824号公報
【特許文献2】特開2005−256636号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記のように車両の駆動力は、車両に前後加速度を付与するだけでなく、旋回時には旋回性能に影響を及ぼし、旋回時に駆動力を制御するとすれば、特許文献2に記載されているように、スタビリティファクタが目標スタビリティファクタに一致もしくは追従するように駆動力を制御し、あるいはヨーレートが目標値に一致するように駆動力を制御する。これに対して、特許文献1に記載された装置は、ドライバの加速の意図が検出された場合には、車両の挙動の安定化制御に優先して加速制御を実行するように構成されている。そのため、特許文献1に記載された発明のように駆動力を制御した場合には、加速特性に優れる車両を得られるとしても、そのステア特性が必ずしも良好にならず、ひいてはドライバの意図とはずれた旋回性能になって違和感が生じる可能性がある。
【0006】
この発明は上記の技術的課題に着目してなされたものであって、旋回性能と加速特性とを運転者の意図に合わせて両立させることのできる駆動力制御装置を提供することを目的とするものである。
【課題を解決するための手段】
【0007】
上記の目的を達成するために請求項1の発明は、運転者の加減速操作に基づいて求められる要求駆動力を、操舵に基づいて求められる補正駆動力によって補正して駆動力を求める車両の駆動力制御装置において、前記操舵による旋回要求の度合いを検出する旋回要求検出手段と、前記旋回要求の度合いに基づいて、前記補正駆動力による駆動力の補正を制限する駆動力補正制限手段とを備えていることを特徴とするものである。
【0008】
請求項2の発明は、請求項1の発明において、前記旋回要求の度合いは、操舵角速度を含み、前記駆動力補正制限手段は、前記操舵角速度が大きいほど、前記駆動力の補正の制限を小さくする手段を含むことを特徴とする車両の駆動力制御装置である。
【0009】
請求項3の発明は、請求項1の発明において、前記旋回要求の度合いは、操舵角速度を含み、前記操舵角速度が予め定めた所定値より大きい場合に前記駆動力の補正を行うように構成されていることを特徴とする車両の駆動力制御装置である。
【0010】
請求項4の発明は、請求項1ないし3のいずれかの発明において、アクセル開度の変化速度を検出する手段を更に備え、前記駆動力補正制限手段は、前記アクセル開度の変化速度が大きいほど、前記駆動力補正の制限を大きくする手段を含むことを特徴とする車両の駆動力制御装置である。
【0011】
請求項5の発明は、請求項1ないし4のいずれかの発明において、前記旋回要求検出手段は、前記操舵角が増大するハンドル切り込みと、前記操舵角が減少するハンドルり切り戻しとを検出する手段を含み、前記駆動力補正制限手段は、前記運転者が加速操作している状態で、前記ハンドル切り込みが検出された場合には前記駆動力の補正の制限を行わず、前記ハンドル切り戻しが検出された場合には前記駆動力の補正の制限を行う手段を含むことを特徴とする車両の駆動力制御装置である。
【発明の効果】
【0012】
請求項1の発明によれば、操舵されている状態で加減速操作された場合、加減速操作に基づく駆動力が、操舵の状態に応じて補正されるので、旋回性能がその点では良好になるが、その駆動力の補正が、旋回要求の度合いに基づいて制限される。その結果、加減速操作に基づく加減速要求が駆動力制御に反映されるので、加速性能が向上する。
【0013】
より具体的には、請求項2あるいは3に記載してあるように、操舵角速度が大きいほど、駆動力の補正の制限が小さくなり、あるいは操舵角速度が所定値より大きい場合に駆動力の補正が実行されるので、旋回要求が大きければ、その旋回要求をより強く反映した駆動力制御となり、旋回性能が良好になる。
【0014】
一方、請求項4の発明によれば、上述した効果に加えて、アクセル開度変化速度が大きい場合には、操舵に基づく駆動力補正が制限されるので、運転者の加減速意図をより強く反映した駆動力制御が実行されることになり、車両の加速性能が良好になる。
【0015】
そして、請求項5の発明によれば、加速操作とハンドル切り込みとが重畳した場合、操舵に基づく駆動力補正が実行されるので、ハンドル切り込みに応じた旋回を行うように駆動力が制御され、その結果、旋回性能が良好になり、また加速操作とハンドル切り戻しとが重畳した場合、操舵に基づく駆動力補正が制限されるので、加速操作に応じた駆動力に可及的に近い駆動力を出力するように制御され、その結果、加速性能が良好になる。
【図面の簡単な説明】
【0016】
【図1】この発明に係る駆動力制御装置によって実行される制御の一例を説明するためのフローチャートである。
【図2】ハンドルが切り込まれていない状態で駆動力補正制限が行われて設定される駆動力変化速度のマップの一例を示す図である。
【図3】ハンドル切り込み時の駆動力補正制限値のマップの一例を示す図である。
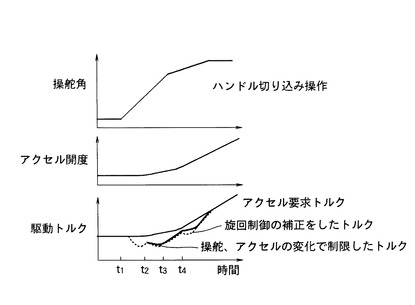
【図4】ハンドル切り込み時の駆動トルクの変化を概念的に示すタイムチャートである。
【図5】ハンドル切り戻し時の駆動トルクの変化を概念的に示すタイムチャートである。
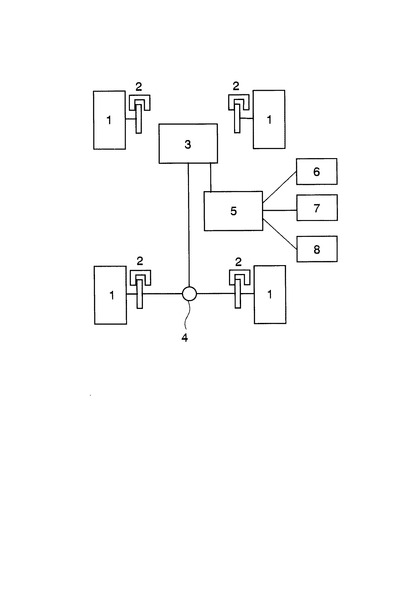
【図6】この発明で対象とすることのできる車両の駆動系統および制御系統を簡略化して示す模式図である。
【発明を実施するための形態】
【0017】
この発明は、目標とする旋回状態となるように駆動力を制御している状態で加減速操作された場合の駆動力を制御する装置であり、特に運転者による旋回意図あるいは加減速意図をより良く反映した駆動力制御を行うように構成された装置である。したがって、この発明で対象とすることのできる車両は、運転者の加減速操作に基づいて駆動力を制御できることに加えて、加減速操作によらずに駆動力を制御できるように構成された車両であり、その駆動力源は内燃機関(エンジン)やモータあるいはこれらのいずれかと自動変速機とを組み合わせた構成のものであってよく、もしくは内燃機関およびモータならびに変速機構を組み合わせたハイブリッド駆動装置などであってもよい。また、駆動力の制御、特に駆動力を減じる制御は、車輪の制動力を制御することにより実行してもよい。
【0018】
図6にこの発明で対象とすることのできる車両のシステムをブロック図で示してあり、ここに示す車両は、後輪駆動車の例である。前後の各車輪1には、個別に制御できるブレーキ2がそれぞれ設けられている。これらのブレーキ2は、例えばアンチロック・ブレーキ・システム(ABS)や車両安定化制御システム(VSC)など従来知られているシステムによって制御されるように構成されており、したがって各車輪1のブレーキ2は、駆動力が掛かり過ぎた場合や制動力が大きすぎる場合には、運転者によるペダル操作に拘わらず制動力が増大させられたり、あるいは反対に制動力が低減される。
【0019】
内燃機関やモータなどからなる上記の駆動力源3は、デファレンシャル4を介して後輪1に連結されており、その駆動力源3はエンジンやモータの出力を変化させることにより、あるいは変速比を変化させることにより駆動力を制御するように構成されている。その駆動力を制御するための制御装置(コントローラ)5が設けられている。このコントローラ5は、マイクロコンピュータを主体にして構成されており、予め記憶してあるデータや外部から入力されるデータを使用して、予め用意されているプログラムに従ってデータ処理し、その結果を制御指令信号として駆動力源3に出力するように構成されている。そして、このコントローラ5には、操舵角センサ6やヨーレートセンサ7あるいはアクセル開度センサ8が検出した信号が検出値として入力されている。なお、これらのセンサ6,7,8は、上記の車両安定化制御システムなどのシステムを構成しているセンサであって、車両における既存の機器である。
【0020】
この発明に係る制御装置は、駆動力の制御として、旋回状態が予め定めた目標旋回状態となるように駆動力を変化させる制御、およびアクセルペダルなどの加減速操作機構を操作することに基づいて駆動力を変化させる制御とを行うように構成されている。その旋回状態の制御は、スタビリティファクタが予め定められている目標値に可及的に一致するように駆動力を制御することにより行われる。ここでスタビリティファクタは、車両のホイールベース、操舵角、車速、ヨーレート、タイヤのスティフネスなど基づいて求めることのできる物理量であって、車両の旋回特性を表す指標である。なお、このスタビリティファクタは、半径が一定の定常円を走行している状態での特性を示すものとして理解することが容易であるが、前後加速度が生じている状態にも拡張することができ、前後加速度が生じている状態まで拡張したスタビリティファクタは、各種の文献によって広く知られている。
【0021】
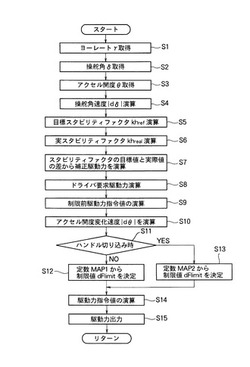
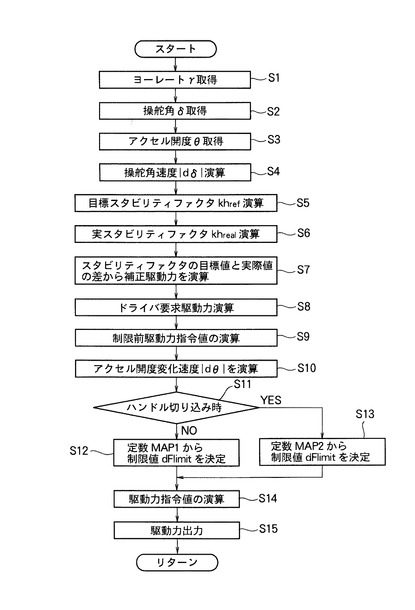
この発明で対象とする車両は、操舵に基づく駆動力制御および加減速操作に基づく駆動力制御とを行うように構成されているから、これらの駆動力制御が重畳することがあり、そのような場合の駆動力の制御をこの発明に装置は、以下に説明するように実行する。図1はその制御の一例を説明するためのフローチャートであって、ここに示すルーチンは所定の短時間ごとに繰り返し実行される。
【0022】
図1に示す例では、先ず、車両の走行状態が検出される。具体的には、ヨーレートセンサ7の検出値であるヨーレートγおよび操舵角センサ6の検出値である操舵角δならびにアクセル開度センサ8の検出値であるアクセル開度θがそれぞれ取得される(読み込まれる)(ステップS1およびステップS2ならびにステップS3)。なお、これらのデータの取得は、いずれが先であってもよく、あるいは同時であってもよい。
【0023】
ついで、旋回要求の度合いが求められる。具体的には、操舵角δの変化率dδすなわち操舵角速度dδが演算される(ステップS4)。また、これらステップS1〜S4の制御と併せて、目標スタビリティファクタkhref 、および実スタビリティファクタkhrealが演算される(ステップS5およびステップS6)。スタビリティファクタの目標値である目標スタビリティファクタkhref は、車両の旋回特性を決めるものであって、車種や車格などに応じて設計上、決められており、例えば操舵角δや車速Vをパラメータとしたマップとして予め用意しておくことができる。したがって、上記のステップS5ではそのマップから目標スタビリティファクタkhref を求めるように構成することができる。
【0024】
また、スタビリティファクタは、車両のホイールベース、操舵角、車速、ヨーレート、タイヤのスティフネスなどに基づいて求めることのできる物理量であり、ヨーレートγを用いて下記の式で求めることができる。
khreal=[δ/(n・L・V・γreal)]−1/V2
なお、nはステアリングギヤ比、Lはホイールベース、Vは車速、γrealはヨーレートセンサの検出値である。
【0025】
目標スタビリティファクタkhref は、対象とする車両の好ましい旋回状態すなわち目標とする旋回状態を示すものとして予め定められているから、実際のスタビリティファクタkhrealがその目標スタビリティファクタkhref に一致するように駆動力の補正量が演算される(ステップS7)。具体的には、スタビリティファクタの目標値khref と実際値khrealとの差から補正駆動力が求められる。スタビリティファクタの値を駆動力に置き換える演算は、従来知られている適宜な方法によればよく、例えばスタビリティファクタは横加速度の関数として表すことができ、またその横加速度は前後加速度に基づくものであり、さらに前後加速度は車体質量と駆動力とによって求めることができるので、これらの関係から駆動力もしくはその補正量を算出すればよい。あるいはスタビリティファクタは前後加速度が生じている旋回状態にまで拡張することができ、その前後加速度とスタビリティファクタとの関係式から前後加速度を求め、かつこれに車体質量を加味して駆動力もしくはその補正量を算出することができる。
【0026】
上記の各制御に続けて、あるいは上記の各制御と並行してドライバ(運転者)の要求駆動力が演算される(ステップS8)。この要求駆動力は、アクセル開度と車速とのマップとして予め用意しておくことができ、したがってステップS8では、その時点の車速およびステップS3で取得されたアクセル開度θとに基づいて、マップから要求駆動力(もしくは目標値)が求められる。そして、この要求駆動力に、前述したステップS7で求められている補正駆動力が加算されて制限前駆動力指令値が演算される(ステップS9)。補正駆動力は、正の値の場合と負の値の場合とがあり、したがって制限前駆動力は、要求駆動力より大きい値になる場合と要求駆動力より小さい値になる場合とがある。また、制限前駆動力指令値は、上記のようにして求められた制限前駆動力を制御指令値に置き換えたものであり、スロットル開度指令値や変速比指令値あるいはアシストモータ指令値、さらにはこれらを複合したものなどである。
【0027】
さらに、上述した制御に続けて、もしくは上述した各制御と並行して加減速の要求の程度が求められる。具体的には、アクセル開度変化速度dθの絶対値が演算される(ステップS10)。ついで、ハンドル切り込み時か否かが判断される(ステップS11)。この判断は、操舵角δおよびその変化速度dδに基づいて行うことができ、操舵角δの絶対値が予め定めた基準値以上で、かつ操舵角速度dδの絶対値が所定の値以上で、かつ、操舵角δとその角速度dδの正負の符号が同じであれば、ハンドル切り込み状態と判断される。
【0028】
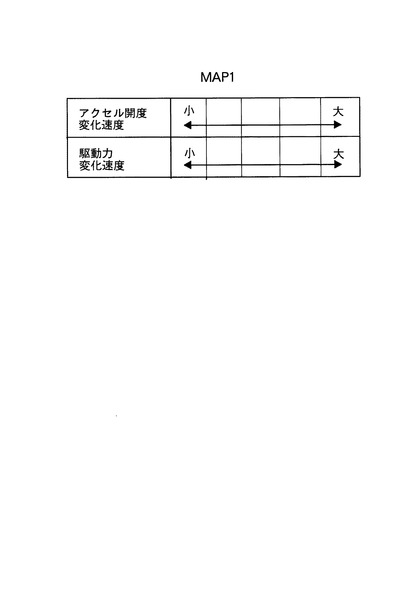
ハンドル切り込み状態でないことによりステップS11で否定的に判断された場合には、いわゆる非切り込み時のための制限値dFlimit がマップ(MAP1)から決定される(ステップS12)。この制限値dFlimit は、上記の補正駆動力による補正を制限するためのものであって、駆動力の変化速度についての制限値であり、アクセルペダルが踏み込まれている加速要求状態についての制限値は、駆動力変化速度の下限値を規定することになり、反対にアクセルペダルが戻されている減速要求状態についての制限値は、駆動力変化速度の上限値を規定することになる。また、この制限値は、運転者が加減速度の過不足や応答遅れなどを感じない値として予め走行実験やシミュレーションなどによって決めてマップとして用意しておくことができる。そのマップ(MAP1)の一例を図2に示してあり、アクセル開度の変化速度が大きいほど、制限値を大きくして駆動力変化速度が大きくなり、アクセル開度変化速度が小さいほど、制限値を小さくして駆動力変化速度が小さくなるように構成した例である。
【0029】
すなわち、アクセル変化速度が小さい場合には、運転者は大きい加減速度を要求していないものと考えられるので、操舵に基づく駆動力制限を小さく(弱く)して駆動力の変化速度は、操舵されていることにより旋回要求がより強く反映され、その結果、操舵に基づく駆動力制御が優先され、旋回性能が良好になる。これに対してアクセル変化速度が大きい場合には、運転者は大きい加減速度を要求しているものと考えられるので、駆動力補正が大きく制限されて駆動力の変化速度は大きい値になり、その結果、加減速操作に基づく駆動力制御が優先され、加減速特性が良好になる。上記のステップS7で演算された補正駆動力が、運転者の要求駆動力を減じるように作用しても、運転者による加減速操作に基づいてより強く補正制限されることにより駆動力変化速度が大きい値になることにより、加減速操作に基づく駆動力が駆動力制御に反映されるからである。なお、この場合、操舵に基づく駆動力が、補正制限されている駆動力変化速度に応じて定まる駆動力を超えた場合には、その操舵に基づく駆動力が実現されるので、旋回特性も良好になる。
【0030】
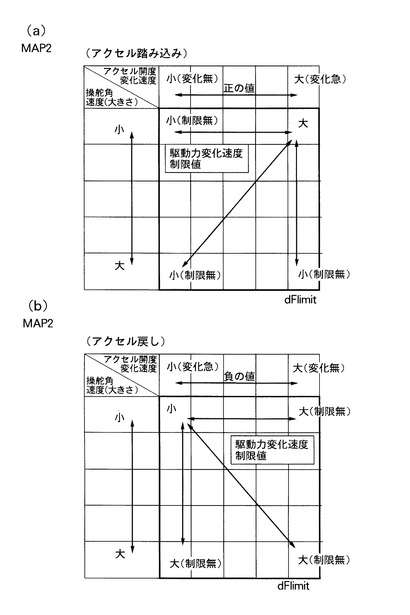
一方、ステップS11で肯定的に判断された場合、すなわちハンドル切り込み時の場合、ハンドル切り込み時のための制限値dFlimit がマップ(MAP2)から決定される(ステップS13)。この制限値dFlimit は、上記の場合と同様に、操舵に基づく駆動力の補正を制限するためのものであって、駆動力の変化速度についての制限値であり、アクセルペダルが踏み込まれている加速要求状態についての制限値は、駆動力変化速度の下限値を規定するものとなり、反対にアクセルペダルが戻されている減速要求状態についての制限値は、駆動力変化速度の上限値を規定するものとなる。また、この制限値は、運転者が加減速度の過不足や応答遅れなどを感じない値として予め走行実験やシミュレーションなどによって決めてマップとして用意しておくことができる。
【0031】
そのマップ(MAP2)の一例を図3の(a)および(b)に示してある。図3の(a)はアクセルペダルが踏み込まれている場合に駆動力変化速度を決定するマップであり、操舵角速度dδの絶対値が小さいほど(すなわち操舵されていない状態に近いほど)、かつアクセル開度変化速度が大きいほど、駆動力変化速度制限値が大きい値になるように構成されたマップである。このマップで定めている駆動力変化速度制限値は、加速要求に基づく駆動力を操舵に基づく駆動力補正を制限するためのものであって、駆動力がその駆動力変化速度で定まる値を下回らないようにするためのものであり、したがってアクセル開度変化速度および操舵角速度が小さい場合には、駆動力補正の制限が小さく(例えばゼロに)なって駆動力変化速度の下限値が小さい値になり、実質的に制限を行わず、例えば操舵に基づく補正駆動力が負の値であってそれに基づいて求められた制限前駆動力の値が小さくなれば、その小さい値の駆動力が出力される。
【0032】
これに対して操舵角速度が小さくかつアクセル開度変化速度が大きい場合には、運転者は大きい加速度を要求していると考えられ、したがって駆動力補正の制限がより強くなって駆動力変化速度の下限値は大きい値に設定され、駆動力の指令値はその下限値を下回らない大きい駆動力を指令するものとなる。すなわち、操舵に基づいて要求される駆動力が小さいとしても、加速操作に基づく駆動力が優先されて駆動力補正が強く制限されて、加速要求を実現するように駆動力が制御される。そして、操舵角速度dδの絶対値が大きいほど(旋回要求の度合いが大きいほど)、またアクセル開度変化速度が小さいほど(加速要求の度合いが小さいほど)、駆動力補正の制限値が小さくなって駆動力変化速度の下限値は小さい値に設定される。操舵に基づく駆動力を、駆動力制御により強く反映させて旋回特性を良好にするためである。
【0033】
図3の(b)は、アクセルペダルが戻されて減速操作されている場合に駆動力変化速度制限値を決定するマップであり、操舵角速度dδの絶対値が小さいほど(すなわち操舵角が保持されている状態に近いほど)、かつアクセル開度が減少していてその変化速度(負の値)が小さいほど(減速要求が大きいほど)、駆動力補正制限をより強く行って駆動力変化速度制限値が小さい値になるように構成されたマップである。このマップで定めている駆動力変化速度制限値は、減速要求に基づく駆動力(負の駆動力)がその駆動力変化速度で定まる値を上回らないようにするためのものであり、したがってアクセル開度変化速度および操舵角速度の絶対値が小さい場合(アクセル開度が減少する方向に急速に変化している場合)には、駆動力補正の制限値が小さい値(絶対値では大きい値)になる(補正制限が強くなる)。したがって、駆動力変化速度の上限値が小さい値(負の値では大きい値)になり、強い制限を行い、例えば操舵に基づく補正駆動力によって前述した制限前駆動力が大きい値(負の小さい値)になるとしても、上限値が負の方向に大きい値となっていることにより、駆動力は小さい駆動力(負の方向に大きい値)に制限される。すなわち、減速度が大きくなる。
【0034】
これに対して操舵角速度の絶対値が小さくかつアクセル開度変化速度が大きい場合すなわち正の方向に対して小さいことによりアクセル開度の変化が小さい場合もしくは変化がない場合には、運転者の要求する減速度が小さいと考えられ、この場合、制限値が大きい値(負の方向には小さい値)になって、駆動力変化速度の上限値は大きい値(負の方向には小さい値)に設定され、駆動力の指令値はその上限値を上回らない小さい駆動力(制動力)を指令するものとなる。すなわち、操舵に基づいて要求される駆動力が負の方向に小さいとしても、駆動力の補正制限が行われて小さい駆動力(大きい減速力)となるように設定された上限値を上回らないように制御され、減速操作に基づく減速力が優先されてこれを実現するように駆動力が制御される。そして、操舵角速度dδの絶対値が大きいほど、またアクセル開度変化速度が大きい(アクセル開度の変化が緩慢もしくは変化しない)ほど、駆動力変化速度の上限値は大きい値(負の方向には小さい値)に設定される。操舵に基づく駆動力を、駆動力制御により強く反映させて旋回特性を良好にするためである。
【0035】
上述したステップS12もしくはステップS13で制限値dFlimit が設定され、その制限値dFlimit と前述したステップS9で演算された制限前駆動力とに基づいて駆動力指令値が演算される(ステップS14)。具体的には、アクセルペダルが踏み込まれて加速要求が生じている状態では、駆動力が上記の制限値dFlimit で補正制限されて設定された駆動力変化速度を下回らないように駆動力についての制御指令値が設定され、またアクセルペダルが戻されて減速要求が生じている状態では、駆動力が上記の制限値dFlimit で補正制限されて設定された駆動力変化速度を上回らないように駆動力についての制御指令値が設定される。こうして設定された駆動力指令値が出力されて駆動力源3による駆動力が制御される(ステップS15)。
【0036】
このような制御を行った場合の駆動トルクの変化の一例を図4に示してある。図4に示す例は、ハンドルを切り込むとともに、アクセルペダを踏み込み、かつその踏み込み速度を当初遅くし、その後に速くした場合の例であり、駆動トルクについての細い実線はアクセル操作に基づいて求まるアクセル要求トルクを示し、破線はスタビリティファクタがその目標値に追従するように補正したトルクを示し、太い実線は図1に示す制御を実行した場合のトルクを示している。t1 時点より以前では、操舵角速度dδが予め定めた所定値より小さいので、駆動力の補正は実行されておらず、その後に操舵されてハンドルが切り込まれ、それに伴ってヨーが発生することにより、スタビリティファクタを使用した旋回制御でのトルクが低下する。すなわち、前述した補正駆動力が負の値であることにより、トルクはアクセル要求トルクより小さくなる。その後、t2 時点にアクセルペダルが相対的にゆっくり踏み込まれると、駆動力変化速度制限値が設定されるが、この場合、アクセル開度変化速度が小さいので、制限が緩く、小さい制限値dFlimit が設定される。もしくは実質的な制限が行われない。そのため、太い実線で示すように、指令される駆動力(すなわちトルク)は、旋回制御で補正されたトルクとほぼ一致する。
【0037】
その後、操舵に対するヨーの遅れが次第に解消されるので、旋回制御によるトルクが次第に増大する。すなわち、前述した補正駆動力の絶対値が小さくなる。その過程のt3 時点に操舵角速度dδが小さくなると、前述したように、加減速操作に基づく駆動力制御が優先されるようになり、具体的には駆動力変化速度の下限値が大きくなる。そして、アクセルペダルが更に踏み込まれると(t4 時点)、旋回制御によるトルクが低下するが、前述した駆動力変化速度の下限値は、アクセル開度変化速度の増大によって大きい値となるので、旋回制御によるトルクよりも加速要求によるトルクが駆動力制御に強く反映され、指令されるトルクは大きい値になる。
【0038】
このように図1に示す制御を実行するように構成されたこの発明に係る駆動力制御装置は、操舵と加速操作とが行われた場合、加速要求が相対的に小さい(もしくは弱い)と考えられる状態では操舵に基づく駆動力が駆動力制御に強く反映され、また加速要求が相対的に大きい(もしくは強い)と考えられる状態では、加速操作に要求駆動力が駆動力制御に強く反映される。その結果、この発明に係る駆動力制御装置によれば、運転者の旋回意図および加速意図に即した駆動力もしくは駆動トルクを実現できるので、旋回性能および加速性能を共に良好なものとすることができる。
【0039】
また、ハンドルの切り戻し操作を行った場合の例を図5に示してある。ここに示す例は、例えばコーナを脱出する際の例であり、t11時点にハンドルが切り戻されて操舵角が小さくなり始め、それに伴って旋回制御によるトルクが低下する。その後のt12時点にアクセルペダルが踏み込まれと、駆動力の補正制限が実行され、旋回制御によるトルクに対して加速要求に基づくトルク制御が優先され、その制限値dFlimit で決まる駆動力についての下限値を下回らないようにトルクが制御される。これを太い実線で示してある。その後、演算して求められる実スタビリティファクタが目標スタビリティファクタに一致もしくは追従するようになって前述した補正駆動力の絶対値が小さくなると旋回制御によるトルクが次第に増大し、駆動トルクが制限値に一致もしくは超える(t13時点)。以降、駆動力変化速度の下限値が大きい値に設定されていることにより、旋回制御によるトルクが大小に変化しても、指令される駆動トルクは下限値を下回ることはなく、加速要求を優先する駆動力制御が実行される。すなわち、ハンドルを切り戻すとともに加速操作されている場合は、駆動力補正の制限が実行されて加速要求を優先した駆動力制御となり、その結果、車両の挙動としては、コーナを素早く抜け、かつその後の直進路を運転者の意図に即した加速性をもって走行することになる。
【0040】
なお、上述した具体例に基づく説明から明らかなように、この発明に係る駆動力制御装置は、操舵されている状態で加減速操作された場合には、その操舵角速度および加減速操作の程度に応じて駆動力補正の制限値を決め、その制限値に基づいて駆動力あるいは駆動トルクを制御するように構成されていればよい。したがって、旋回制御でトルクを制御するように構成された装置に、加減速操作に基づくトルクの制御を加えるように構成するとした場合、その加減速操作に基づく駆動力もしくは駆動トルクの制御は、アクセル開度変化速度の絶対値に基づいて、例えば前述した図2に示すマップに基づいて駆動力変化速度の制限値を設定するように構成すればよい。このように構成した場合の制御は、例えば図1に示すフローチャートにおけるステップS11およびステップS13を無くしてステップS10からステップS12に進むルーチンで表される制御とすればよい。
【0041】
ここで、上記の具体例とこの発明との関係を簡単に説明すると、図1に示すステップS3,S4,S11の制御を実行する機能的手段が、この発明における旋回要求検出手段に相当し、ステップS12,S13,S14の制御を実行する機能的手段が、この発明における駆動力補正制限手段に相当し、さらにステップS10の制御を実行する機能的手段が、この発明におけるアクセル開度の変化速度を検出する手段に相当する。
【0042】
なお、この発明は上述した具体例に限定されないのであって、旋回要求の度合いは操舵角速度以外に、その時点の車速をも加味して検出するように構成してもよく、また車速と操舵角の絶対値とに基づいて検出することとしてもよい。
【符号の説明】
【0043】
3…駆動力源、 5…コントローラ、 6…操舵角センサ、 7…ヨーレートセンサ、 8…アクセル開度センサ。
【技術分野】
【0001】
この発明は、車両の駆動力を制御する装置に関し、特にステア特性に関連して駆動力を制御し、また加減速要求に基づいて駆動力を制御する装置に関するものである。
【背景技術】
【0002】
車両の加減速は、基本的には、アクセルペダルを踏み込み、あるいは踏み込んだアクセルペダルを戻すことによりエンジンなどの駆動力源の出力および駆動力を増減して行う。一方、タイヤが路面と接触する接地点は、車体の重心から外れているから、旋回時には駆動トルクの変化に応じてタイヤでの横力が変化し、また車体に作用するヨーモーメントが変化する。そのため、駆動トルクに応じて旋回性能(旋回特性)が変化する。
【0003】
例えば、特許文献1に記載された装置は、車両の挙動が不安定になったことが検出された場合には、エンジン出力を抑制して車両の挙動を安定させ、これとは反対にドライバが加速を意図して操作を行っている場合には、車両挙動安定化のための制動制御を行わないように構成されている。また、特許文献2には、理想的な旋回半径となるように、時々刻々変化する車両周囲の環境に応じて車軸トルクを制御してスタビリティファクタを安定化させるように構成された装置が記載されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−271824号公報
【特許文献2】特開2005−256636号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記のように車両の駆動力は、車両に前後加速度を付与するだけでなく、旋回時には旋回性能に影響を及ぼし、旋回時に駆動力を制御するとすれば、特許文献2に記載されているように、スタビリティファクタが目標スタビリティファクタに一致もしくは追従するように駆動力を制御し、あるいはヨーレートが目標値に一致するように駆動力を制御する。これに対して、特許文献1に記載された装置は、ドライバの加速の意図が検出された場合には、車両の挙動の安定化制御に優先して加速制御を実行するように構成されている。そのため、特許文献1に記載された発明のように駆動力を制御した場合には、加速特性に優れる車両を得られるとしても、そのステア特性が必ずしも良好にならず、ひいてはドライバの意図とはずれた旋回性能になって違和感が生じる可能性がある。
【0006】
この発明は上記の技術的課題に着目してなされたものであって、旋回性能と加速特性とを運転者の意図に合わせて両立させることのできる駆動力制御装置を提供することを目的とするものである。
【課題を解決するための手段】
【0007】
上記の目的を達成するために請求項1の発明は、運転者の加減速操作に基づいて求められる要求駆動力を、操舵に基づいて求められる補正駆動力によって補正して駆動力を求める車両の駆動力制御装置において、前記操舵による旋回要求の度合いを検出する旋回要求検出手段と、前記旋回要求の度合いに基づいて、前記補正駆動力による駆動力の補正を制限する駆動力補正制限手段とを備えていることを特徴とするものである。
【0008】
請求項2の発明は、請求項1の発明において、前記旋回要求の度合いは、操舵角速度を含み、前記駆動力補正制限手段は、前記操舵角速度が大きいほど、前記駆動力の補正の制限を小さくする手段を含むことを特徴とする車両の駆動力制御装置である。
【0009】
請求項3の発明は、請求項1の発明において、前記旋回要求の度合いは、操舵角速度を含み、前記操舵角速度が予め定めた所定値より大きい場合に前記駆動力の補正を行うように構成されていることを特徴とする車両の駆動力制御装置である。
【0010】
請求項4の発明は、請求項1ないし3のいずれかの発明において、アクセル開度の変化速度を検出する手段を更に備え、前記駆動力補正制限手段は、前記アクセル開度の変化速度が大きいほど、前記駆動力補正の制限を大きくする手段を含むことを特徴とする車両の駆動力制御装置である。
【0011】
請求項5の発明は、請求項1ないし4のいずれかの発明において、前記旋回要求検出手段は、前記操舵角が増大するハンドル切り込みと、前記操舵角が減少するハンドルり切り戻しとを検出する手段を含み、前記駆動力補正制限手段は、前記運転者が加速操作している状態で、前記ハンドル切り込みが検出された場合には前記駆動力の補正の制限を行わず、前記ハンドル切り戻しが検出された場合には前記駆動力の補正の制限を行う手段を含むことを特徴とする車両の駆動力制御装置である。
【発明の効果】
【0012】
請求項1の発明によれば、操舵されている状態で加減速操作された場合、加減速操作に基づく駆動力が、操舵の状態に応じて補正されるので、旋回性能がその点では良好になるが、その駆動力の補正が、旋回要求の度合いに基づいて制限される。その結果、加減速操作に基づく加減速要求が駆動力制御に反映されるので、加速性能が向上する。
【0013】
より具体的には、請求項2あるいは3に記載してあるように、操舵角速度が大きいほど、駆動力の補正の制限が小さくなり、あるいは操舵角速度が所定値より大きい場合に駆動力の補正が実行されるので、旋回要求が大きければ、その旋回要求をより強く反映した駆動力制御となり、旋回性能が良好になる。
【0014】
一方、請求項4の発明によれば、上述した効果に加えて、アクセル開度変化速度が大きい場合には、操舵に基づく駆動力補正が制限されるので、運転者の加減速意図をより強く反映した駆動力制御が実行されることになり、車両の加速性能が良好になる。
【0015】
そして、請求項5の発明によれば、加速操作とハンドル切り込みとが重畳した場合、操舵に基づく駆動力補正が実行されるので、ハンドル切り込みに応じた旋回を行うように駆動力が制御され、その結果、旋回性能が良好になり、また加速操作とハンドル切り戻しとが重畳した場合、操舵に基づく駆動力補正が制限されるので、加速操作に応じた駆動力に可及的に近い駆動力を出力するように制御され、その結果、加速性能が良好になる。
【図面の簡単な説明】
【0016】
【図1】この発明に係る駆動力制御装置によって実行される制御の一例を説明するためのフローチャートである。
【図2】ハンドルが切り込まれていない状態で駆動力補正制限が行われて設定される駆動力変化速度のマップの一例を示す図である。
【図3】ハンドル切り込み時の駆動力補正制限値のマップの一例を示す図である。
【図4】ハンドル切り込み時の駆動トルクの変化を概念的に示すタイムチャートである。
【図5】ハンドル切り戻し時の駆動トルクの変化を概念的に示すタイムチャートである。
【図6】この発明で対象とすることのできる車両の駆動系統および制御系統を簡略化して示す模式図である。
【発明を実施するための形態】
【0017】
この発明は、目標とする旋回状態となるように駆動力を制御している状態で加減速操作された場合の駆動力を制御する装置であり、特に運転者による旋回意図あるいは加減速意図をより良く反映した駆動力制御を行うように構成された装置である。したがって、この発明で対象とすることのできる車両は、運転者の加減速操作に基づいて駆動力を制御できることに加えて、加減速操作によらずに駆動力を制御できるように構成された車両であり、その駆動力源は内燃機関(エンジン)やモータあるいはこれらのいずれかと自動変速機とを組み合わせた構成のものであってよく、もしくは内燃機関およびモータならびに変速機構を組み合わせたハイブリッド駆動装置などであってもよい。また、駆動力の制御、特に駆動力を減じる制御は、車輪の制動力を制御することにより実行してもよい。
【0018】
図6にこの発明で対象とすることのできる車両のシステムをブロック図で示してあり、ここに示す車両は、後輪駆動車の例である。前後の各車輪1には、個別に制御できるブレーキ2がそれぞれ設けられている。これらのブレーキ2は、例えばアンチロック・ブレーキ・システム(ABS)や車両安定化制御システム(VSC)など従来知られているシステムによって制御されるように構成されており、したがって各車輪1のブレーキ2は、駆動力が掛かり過ぎた場合や制動力が大きすぎる場合には、運転者によるペダル操作に拘わらず制動力が増大させられたり、あるいは反対に制動力が低減される。
【0019】
内燃機関やモータなどからなる上記の駆動力源3は、デファレンシャル4を介して後輪1に連結されており、その駆動力源3はエンジンやモータの出力を変化させることにより、あるいは変速比を変化させることにより駆動力を制御するように構成されている。その駆動力を制御するための制御装置(コントローラ)5が設けられている。このコントローラ5は、マイクロコンピュータを主体にして構成されており、予め記憶してあるデータや外部から入力されるデータを使用して、予め用意されているプログラムに従ってデータ処理し、その結果を制御指令信号として駆動力源3に出力するように構成されている。そして、このコントローラ5には、操舵角センサ6やヨーレートセンサ7あるいはアクセル開度センサ8が検出した信号が検出値として入力されている。なお、これらのセンサ6,7,8は、上記の車両安定化制御システムなどのシステムを構成しているセンサであって、車両における既存の機器である。
【0020】
この発明に係る制御装置は、駆動力の制御として、旋回状態が予め定めた目標旋回状態となるように駆動力を変化させる制御、およびアクセルペダルなどの加減速操作機構を操作することに基づいて駆動力を変化させる制御とを行うように構成されている。その旋回状態の制御は、スタビリティファクタが予め定められている目標値に可及的に一致するように駆動力を制御することにより行われる。ここでスタビリティファクタは、車両のホイールベース、操舵角、車速、ヨーレート、タイヤのスティフネスなど基づいて求めることのできる物理量であって、車両の旋回特性を表す指標である。なお、このスタビリティファクタは、半径が一定の定常円を走行している状態での特性を示すものとして理解することが容易であるが、前後加速度が生じている状態にも拡張することができ、前後加速度が生じている状態まで拡張したスタビリティファクタは、各種の文献によって広く知られている。
【0021】
この発明で対象とする車両は、操舵に基づく駆動力制御および加減速操作に基づく駆動力制御とを行うように構成されているから、これらの駆動力制御が重畳することがあり、そのような場合の駆動力の制御をこの発明に装置は、以下に説明するように実行する。図1はその制御の一例を説明するためのフローチャートであって、ここに示すルーチンは所定の短時間ごとに繰り返し実行される。
【0022】
図1に示す例では、先ず、車両の走行状態が検出される。具体的には、ヨーレートセンサ7の検出値であるヨーレートγおよび操舵角センサ6の検出値である操舵角δならびにアクセル開度センサ8の検出値であるアクセル開度θがそれぞれ取得される(読み込まれる)(ステップS1およびステップS2ならびにステップS3)。なお、これらのデータの取得は、いずれが先であってもよく、あるいは同時であってもよい。
【0023】
ついで、旋回要求の度合いが求められる。具体的には、操舵角δの変化率dδすなわち操舵角速度dδが演算される(ステップS4)。また、これらステップS1〜S4の制御と併せて、目標スタビリティファクタkhref 、および実スタビリティファクタkhrealが演算される(ステップS5およびステップS6)。スタビリティファクタの目標値である目標スタビリティファクタkhref は、車両の旋回特性を決めるものであって、車種や車格などに応じて設計上、決められており、例えば操舵角δや車速Vをパラメータとしたマップとして予め用意しておくことができる。したがって、上記のステップS5ではそのマップから目標スタビリティファクタkhref を求めるように構成することができる。
【0024】
また、スタビリティファクタは、車両のホイールベース、操舵角、車速、ヨーレート、タイヤのスティフネスなどに基づいて求めることのできる物理量であり、ヨーレートγを用いて下記の式で求めることができる。
khreal=[δ/(n・L・V・γreal)]−1/V2
なお、nはステアリングギヤ比、Lはホイールベース、Vは車速、γrealはヨーレートセンサの検出値である。
【0025】
目標スタビリティファクタkhref は、対象とする車両の好ましい旋回状態すなわち目標とする旋回状態を示すものとして予め定められているから、実際のスタビリティファクタkhrealがその目標スタビリティファクタkhref に一致するように駆動力の補正量が演算される(ステップS7)。具体的には、スタビリティファクタの目標値khref と実際値khrealとの差から補正駆動力が求められる。スタビリティファクタの値を駆動力に置き換える演算は、従来知られている適宜な方法によればよく、例えばスタビリティファクタは横加速度の関数として表すことができ、またその横加速度は前後加速度に基づくものであり、さらに前後加速度は車体質量と駆動力とによって求めることができるので、これらの関係から駆動力もしくはその補正量を算出すればよい。あるいはスタビリティファクタは前後加速度が生じている旋回状態にまで拡張することができ、その前後加速度とスタビリティファクタとの関係式から前後加速度を求め、かつこれに車体質量を加味して駆動力もしくはその補正量を算出することができる。
【0026】
上記の各制御に続けて、あるいは上記の各制御と並行してドライバ(運転者)の要求駆動力が演算される(ステップS8)。この要求駆動力は、アクセル開度と車速とのマップとして予め用意しておくことができ、したがってステップS8では、その時点の車速およびステップS3で取得されたアクセル開度θとに基づいて、マップから要求駆動力(もしくは目標値)が求められる。そして、この要求駆動力に、前述したステップS7で求められている補正駆動力が加算されて制限前駆動力指令値が演算される(ステップS9)。補正駆動力は、正の値の場合と負の値の場合とがあり、したがって制限前駆動力は、要求駆動力より大きい値になる場合と要求駆動力より小さい値になる場合とがある。また、制限前駆動力指令値は、上記のようにして求められた制限前駆動力を制御指令値に置き換えたものであり、スロットル開度指令値や変速比指令値あるいはアシストモータ指令値、さらにはこれらを複合したものなどである。
【0027】
さらに、上述した制御に続けて、もしくは上述した各制御と並行して加減速の要求の程度が求められる。具体的には、アクセル開度変化速度dθの絶対値が演算される(ステップS10)。ついで、ハンドル切り込み時か否かが判断される(ステップS11)。この判断は、操舵角δおよびその変化速度dδに基づいて行うことができ、操舵角δの絶対値が予め定めた基準値以上で、かつ操舵角速度dδの絶対値が所定の値以上で、かつ、操舵角δとその角速度dδの正負の符号が同じであれば、ハンドル切り込み状態と判断される。
【0028】
ハンドル切り込み状態でないことによりステップS11で否定的に判断された場合には、いわゆる非切り込み時のための制限値dFlimit がマップ(MAP1)から決定される(ステップS12)。この制限値dFlimit は、上記の補正駆動力による補正を制限するためのものであって、駆動力の変化速度についての制限値であり、アクセルペダルが踏み込まれている加速要求状態についての制限値は、駆動力変化速度の下限値を規定することになり、反対にアクセルペダルが戻されている減速要求状態についての制限値は、駆動力変化速度の上限値を規定することになる。また、この制限値は、運転者が加減速度の過不足や応答遅れなどを感じない値として予め走行実験やシミュレーションなどによって決めてマップとして用意しておくことができる。そのマップ(MAP1)の一例を図2に示してあり、アクセル開度の変化速度が大きいほど、制限値を大きくして駆動力変化速度が大きくなり、アクセル開度変化速度が小さいほど、制限値を小さくして駆動力変化速度が小さくなるように構成した例である。
【0029】
すなわち、アクセル変化速度が小さい場合には、運転者は大きい加減速度を要求していないものと考えられるので、操舵に基づく駆動力制限を小さく(弱く)して駆動力の変化速度は、操舵されていることにより旋回要求がより強く反映され、その結果、操舵に基づく駆動力制御が優先され、旋回性能が良好になる。これに対してアクセル変化速度が大きい場合には、運転者は大きい加減速度を要求しているものと考えられるので、駆動力補正が大きく制限されて駆動力の変化速度は大きい値になり、その結果、加減速操作に基づく駆動力制御が優先され、加減速特性が良好になる。上記のステップS7で演算された補正駆動力が、運転者の要求駆動力を減じるように作用しても、運転者による加減速操作に基づいてより強く補正制限されることにより駆動力変化速度が大きい値になることにより、加減速操作に基づく駆動力が駆動力制御に反映されるからである。なお、この場合、操舵に基づく駆動力が、補正制限されている駆動力変化速度に応じて定まる駆動力を超えた場合には、その操舵に基づく駆動力が実現されるので、旋回特性も良好になる。
【0030】
一方、ステップS11で肯定的に判断された場合、すなわちハンドル切り込み時の場合、ハンドル切り込み時のための制限値dFlimit がマップ(MAP2)から決定される(ステップS13)。この制限値dFlimit は、上記の場合と同様に、操舵に基づく駆動力の補正を制限するためのものであって、駆動力の変化速度についての制限値であり、アクセルペダルが踏み込まれている加速要求状態についての制限値は、駆動力変化速度の下限値を規定するものとなり、反対にアクセルペダルが戻されている減速要求状態についての制限値は、駆動力変化速度の上限値を規定するものとなる。また、この制限値は、運転者が加減速度の過不足や応答遅れなどを感じない値として予め走行実験やシミュレーションなどによって決めてマップとして用意しておくことができる。
【0031】
そのマップ(MAP2)の一例を図3の(a)および(b)に示してある。図3の(a)はアクセルペダルが踏み込まれている場合に駆動力変化速度を決定するマップであり、操舵角速度dδの絶対値が小さいほど(すなわち操舵されていない状態に近いほど)、かつアクセル開度変化速度が大きいほど、駆動力変化速度制限値が大きい値になるように構成されたマップである。このマップで定めている駆動力変化速度制限値は、加速要求に基づく駆動力を操舵に基づく駆動力補正を制限するためのものであって、駆動力がその駆動力変化速度で定まる値を下回らないようにするためのものであり、したがってアクセル開度変化速度および操舵角速度が小さい場合には、駆動力補正の制限が小さく(例えばゼロに)なって駆動力変化速度の下限値が小さい値になり、実質的に制限を行わず、例えば操舵に基づく補正駆動力が負の値であってそれに基づいて求められた制限前駆動力の値が小さくなれば、その小さい値の駆動力が出力される。
【0032】
これに対して操舵角速度が小さくかつアクセル開度変化速度が大きい場合には、運転者は大きい加速度を要求していると考えられ、したがって駆動力補正の制限がより強くなって駆動力変化速度の下限値は大きい値に設定され、駆動力の指令値はその下限値を下回らない大きい駆動力を指令するものとなる。すなわち、操舵に基づいて要求される駆動力が小さいとしても、加速操作に基づく駆動力が優先されて駆動力補正が強く制限されて、加速要求を実現するように駆動力が制御される。そして、操舵角速度dδの絶対値が大きいほど(旋回要求の度合いが大きいほど)、またアクセル開度変化速度が小さいほど(加速要求の度合いが小さいほど)、駆動力補正の制限値が小さくなって駆動力変化速度の下限値は小さい値に設定される。操舵に基づく駆動力を、駆動力制御により強く反映させて旋回特性を良好にするためである。
【0033】
図3の(b)は、アクセルペダルが戻されて減速操作されている場合に駆動力変化速度制限値を決定するマップであり、操舵角速度dδの絶対値が小さいほど(すなわち操舵角が保持されている状態に近いほど)、かつアクセル開度が減少していてその変化速度(負の値)が小さいほど(減速要求が大きいほど)、駆動力補正制限をより強く行って駆動力変化速度制限値が小さい値になるように構成されたマップである。このマップで定めている駆動力変化速度制限値は、減速要求に基づく駆動力(負の駆動力)がその駆動力変化速度で定まる値を上回らないようにするためのものであり、したがってアクセル開度変化速度および操舵角速度の絶対値が小さい場合(アクセル開度が減少する方向に急速に変化している場合)には、駆動力補正の制限値が小さい値(絶対値では大きい値)になる(補正制限が強くなる)。したがって、駆動力変化速度の上限値が小さい値(負の値では大きい値)になり、強い制限を行い、例えば操舵に基づく補正駆動力によって前述した制限前駆動力が大きい値(負の小さい値)になるとしても、上限値が負の方向に大きい値となっていることにより、駆動力は小さい駆動力(負の方向に大きい値)に制限される。すなわち、減速度が大きくなる。
【0034】
これに対して操舵角速度の絶対値が小さくかつアクセル開度変化速度が大きい場合すなわち正の方向に対して小さいことによりアクセル開度の変化が小さい場合もしくは変化がない場合には、運転者の要求する減速度が小さいと考えられ、この場合、制限値が大きい値(負の方向には小さい値)になって、駆動力変化速度の上限値は大きい値(負の方向には小さい値)に設定され、駆動力の指令値はその上限値を上回らない小さい駆動力(制動力)を指令するものとなる。すなわち、操舵に基づいて要求される駆動力が負の方向に小さいとしても、駆動力の補正制限が行われて小さい駆動力(大きい減速力)となるように設定された上限値を上回らないように制御され、減速操作に基づく減速力が優先されてこれを実現するように駆動力が制御される。そして、操舵角速度dδの絶対値が大きいほど、またアクセル開度変化速度が大きい(アクセル開度の変化が緩慢もしくは変化しない)ほど、駆動力変化速度の上限値は大きい値(負の方向には小さい値)に設定される。操舵に基づく駆動力を、駆動力制御により強く反映させて旋回特性を良好にするためである。
【0035】
上述したステップS12もしくはステップS13で制限値dFlimit が設定され、その制限値dFlimit と前述したステップS9で演算された制限前駆動力とに基づいて駆動力指令値が演算される(ステップS14)。具体的には、アクセルペダルが踏み込まれて加速要求が生じている状態では、駆動力が上記の制限値dFlimit で補正制限されて設定された駆動力変化速度を下回らないように駆動力についての制御指令値が設定され、またアクセルペダルが戻されて減速要求が生じている状態では、駆動力が上記の制限値dFlimit で補正制限されて設定された駆動力変化速度を上回らないように駆動力についての制御指令値が設定される。こうして設定された駆動力指令値が出力されて駆動力源3による駆動力が制御される(ステップS15)。
【0036】
このような制御を行った場合の駆動トルクの変化の一例を図4に示してある。図4に示す例は、ハンドルを切り込むとともに、アクセルペダを踏み込み、かつその踏み込み速度を当初遅くし、その後に速くした場合の例であり、駆動トルクについての細い実線はアクセル操作に基づいて求まるアクセル要求トルクを示し、破線はスタビリティファクタがその目標値に追従するように補正したトルクを示し、太い実線は図1に示す制御を実行した場合のトルクを示している。t1 時点より以前では、操舵角速度dδが予め定めた所定値より小さいので、駆動力の補正は実行されておらず、その後に操舵されてハンドルが切り込まれ、それに伴ってヨーが発生することにより、スタビリティファクタを使用した旋回制御でのトルクが低下する。すなわち、前述した補正駆動力が負の値であることにより、トルクはアクセル要求トルクより小さくなる。その後、t2 時点にアクセルペダルが相対的にゆっくり踏み込まれると、駆動力変化速度制限値が設定されるが、この場合、アクセル開度変化速度が小さいので、制限が緩く、小さい制限値dFlimit が設定される。もしくは実質的な制限が行われない。そのため、太い実線で示すように、指令される駆動力(すなわちトルク)は、旋回制御で補正されたトルクとほぼ一致する。
【0037】
その後、操舵に対するヨーの遅れが次第に解消されるので、旋回制御によるトルクが次第に増大する。すなわち、前述した補正駆動力の絶対値が小さくなる。その過程のt3 時点に操舵角速度dδが小さくなると、前述したように、加減速操作に基づく駆動力制御が優先されるようになり、具体的には駆動力変化速度の下限値が大きくなる。そして、アクセルペダルが更に踏み込まれると(t4 時点)、旋回制御によるトルクが低下するが、前述した駆動力変化速度の下限値は、アクセル開度変化速度の増大によって大きい値となるので、旋回制御によるトルクよりも加速要求によるトルクが駆動力制御に強く反映され、指令されるトルクは大きい値になる。
【0038】
このように図1に示す制御を実行するように構成されたこの発明に係る駆動力制御装置は、操舵と加速操作とが行われた場合、加速要求が相対的に小さい(もしくは弱い)と考えられる状態では操舵に基づく駆動力が駆動力制御に強く反映され、また加速要求が相対的に大きい(もしくは強い)と考えられる状態では、加速操作に要求駆動力が駆動力制御に強く反映される。その結果、この発明に係る駆動力制御装置によれば、運転者の旋回意図および加速意図に即した駆動力もしくは駆動トルクを実現できるので、旋回性能および加速性能を共に良好なものとすることができる。
【0039】
また、ハンドルの切り戻し操作を行った場合の例を図5に示してある。ここに示す例は、例えばコーナを脱出する際の例であり、t11時点にハンドルが切り戻されて操舵角が小さくなり始め、それに伴って旋回制御によるトルクが低下する。その後のt12時点にアクセルペダルが踏み込まれと、駆動力の補正制限が実行され、旋回制御によるトルクに対して加速要求に基づくトルク制御が優先され、その制限値dFlimit で決まる駆動力についての下限値を下回らないようにトルクが制御される。これを太い実線で示してある。その後、演算して求められる実スタビリティファクタが目標スタビリティファクタに一致もしくは追従するようになって前述した補正駆動力の絶対値が小さくなると旋回制御によるトルクが次第に増大し、駆動トルクが制限値に一致もしくは超える(t13時点)。以降、駆動力変化速度の下限値が大きい値に設定されていることにより、旋回制御によるトルクが大小に変化しても、指令される駆動トルクは下限値を下回ることはなく、加速要求を優先する駆動力制御が実行される。すなわち、ハンドルを切り戻すとともに加速操作されている場合は、駆動力補正の制限が実行されて加速要求を優先した駆動力制御となり、その結果、車両の挙動としては、コーナを素早く抜け、かつその後の直進路を運転者の意図に即した加速性をもって走行することになる。
【0040】
なお、上述した具体例に基づく説明から明らかなように、この発明に係る駆動力制御装置は、操舵されている状態で加減速操作された場合には、その操舵角速度および加減速操作の程度に応じて駆動力補正の制限値を決め、その制限値に基づいて駆動力あるいは駆動トルクを制御するように構成されていればよい。したがって、旋回制御でトルクを制御するように構成された装置に、加減速操作に基づくトルクの制御を加えるように構成するとした場合、その加減速操作に基づく駆動力もしくは駆動トルクの制御は、アクセル開度変化速度の絶対値に基づいて、例えば前述した図2に示すマップに基づいて駆動力変化速度の制限値を設定するように構成すればよい。このように構成した場合の制御は、例えば図1に示すフローチャートにおけるステップS11およびステップS13を無くしてステップS10からステップS12に進むルーチンで表される制御とすればよい。
【0041】
ここで、上記の具体例とこの発明との関係を簡単に説明すると、図1に示すステップS3,S4,S11の制御を実行する機能的手段が、この発明における旋回要求検出手段に相当し、ステップS12,S13,S14の制御を実行する機能的手段が、この発明における駆動力補正制限手段に相当し、さらにステップS10の制御を実行する機能的手段が、この発明におけるアクセル開度の変化速度を検出する手段に相当する。
【0042】
なお、この発明は上述した具体例に限定されないのであって、旋回要求の度合いは操舵角速度以外に、その時点の車速をも加味して検出するように構成してもよく、また車速と操舵角の絶対値とに基づいて検出することとしてもよい。
【符号の説明】
【0043】
3…駆動力源、 5…コントローラ、 6…操舵角センサ、 7…ヨーレートセンサ、 8…アクセル開度センサ。
【特許請求の範囲】
【請求項1】
運転者の加減速操作に基づいて求められる要求駆動力を、操舵に基づいて求められる補正駆動力によって補正して駆動力を求める車両の駆動力制御装置において、
前記操舵による旋回要求の度合いを検出する旋回要求検出手段と、
前記旋回要求の度合いに基づいて、前記補正駆動力による駆動力の補正を制限する駆動力補正制限手段と
を備えていることを特徴とする車両の駆動力制御装置。
【請求項2】
前記旋回要求の度合いは、操舵角速度を含み、
前記駆動力補正制限手段は、前記操舵角速度が大きいほど、前記駆動力の補正の制限を小さくする手段を含む
ことを特徴とする請求項1に記載の車両の駆動力制御装置。
【請求項3】
前記旋回要求の度合いは、操舵角速度を含み、
前記操舵角速度が予め定めた所定値より大きい場合に前記駆動力の補正を行うように構成されていることを特徴とする請求項1に記載の車両の駆動力制御装置。
【請求項4】
アクセル開度の変化速度を検出する手段を更に備え、
前記駆動力補正制限手段は、前記アクセル開度の変化速度が大きいほど、前記駆動力補正の制限を大きくする手段を含む
ことを特徴とする請求項1ないし3のいずれかに記載の車両の駆動力制御装置。
【請求項5】
前記旋回要求検出手段は、前記操舵角が増大するハンドル切り込みと、前記操舵角が減少するハンドル切り戻しとを検出する手段を含み、
前記駆動力補正制限手段は、前記運転者が加速操作している状態で、前記ハンドル切り込みが検出された場合には前記駆動力の補正の制限を行わず、前記ハンドル切り戻しが検出された場合には前記駆動力の補正の制限を行う手段を含む
ことを特徴とする請求項1ないし4のいずれかに記載の車両の駆動力制御装置。
【請求項1】
運転者の加減速操作に基づいて求められる要求駆動力を、操舵に基づいて求められる補正駆動力によって補正して駆動力を求める車両の駆動力制御装置において、
前記操舵による旋回要求の度合いを検出する旋回要求検出手段と、
前記旋回要求の度合いに基づいて、前記補正駆動力による駆動力の補正を制限する駆動力補正制限手段と
を備えていることを特徴とする車両の駆動力制御装置。
【請求項2】
前記旋回要求の度合いは、操舵角速度を含み、
前記駆動力補正制限手段は、前記操舵角速度が大きいほど、前記駆動力の補正の制限を小さくする手段を含む
ことを特徴とする請求項1に記載の車両の駆動力制御装置。
【請求項3】
前記旋回要求の度合いは、操舵角速度を含み、
前記操舵角速度が予め定めた所定値より大きい場合に前記駆動力の補正を行うように構成されていることを特徴とする請求項1に記載の車両の駆動力制御装置。
【請求項4】
アクセル開度の変化速度を検出する手段を更に備え、
前記駆動力補正制限手段は、前記アクセル開度の変化速度が大きいほど、前記駆動力補正の制限を大きくする手段を含む
ことを特徴とする請求項1ないし3のいずれかに記載の車両の駆動力制御装置。
【請求項5】
前記旋回要求検出手段は、前記操舵角が増大するハンドル切り込みと、前記操舵角が減少するハンドル切り戻しとを検出する手段を含み、
前記駆動力補正制限手段は、前記運転者が加速操作している状態で、前記ハンドル切り込みが検出された場合には前記駆動力の補正の制限を行わず、前記ハンドル切り戻しが検出された場合には前記駆動力の補正の制限を行う手段を含む
ことを特徴とする請求項1ないし4のいずれかに記載の車両の駆動力制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】

【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2012−210832(P2012−210832A)
【公開日】平成24年11月1日(2012.11.1)
【国際特許分類】
【出願番号】特願2011−76464(P2011−76464)
【出願日】平成23年3月30日(2011.3.30)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成24年11月1日(2012.11.1)
【国際特許分類】
【出願日】平成23年3月30日(2011.3.30)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]