
車両の駆動力制御装置
【課題】 電動機の効率を勘案して駆動力を制御することにより、車両を適切に走行させるとともに車体に発生する挙動を制御する車両の駆動力制御装置を提供すること。
【解決手段】 電子制御ユニット30においては、入力部41がセンサ31,32,33から各検出値を入力し、車両加減速制御指令値演算部42が制駆動用モータトルク指令値Tdfl,Tdfr,Tdrl,Tdrrを演算する。又、車体挙動制御指令値演算部43が制御用モータトルク指令値Tcfl,Tcfr,Tcrl,Tcrrを演算する。そして、各輪モータ効率演算部44が指令値Tcfl,Tcfr,Tcrl,Tcrrと車速とを用いてモータ効率kを決定し、各輪最終モータトルク指令値演算部45がモータ効率kを指令値Tcfl,Tcfr,Tcrl,Tcrrに乗算することによって、補正された制御用最終モータトルク指令値kTcfl,kTcfr,kTcrl,kTcrrを演算する。
【解決手段】 電子制御ユニット30においては、入力部41がセンサ31,32,33から各検出値を入力し、車両加減速制御指令値演算部42が制駆動用モータトルク指令値Tdfl,Tdfr,Tdrl,Tdrrを演算する。又、車体挙動制御指令値演算部43が制御用モータトルク指令値Tcfl,Tcfr,Tcrl,Tcrrを演算する。そして、各輪モータ効率演算部44が指令値Tcfl,Tcfr,Tcrl,Tcrrと車速とを用いてモータ効率kを決定し、各輪最終モータトルク指令値演算部45がモータ効率kを指令値Tcfl,Tcfr,Tcrl,Tcrrに乗算することによって、補正された制御用最終モータトルク指令値kTcfl,kTcfr,kTcrl,kTcrrを演算する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の各輪で発生させる駆動力を配分して個別に制御する車両の駆動力制御装置に関する。
【背景技術】
【0002】
近年、電気自動車の一形態として、車輪のホイール内部もしくはその近傍に電動機(電気モータ)を配置し、この電動機により車輪を直接駆動する、所謂、インホイールモータ方式の車両が開発されている。このインホイールモータ方式の車両においては、各輪(駆動輪)ごとに設けた電動機を個別に回転制御する、すなわち、各電動機を個別に力行制御又は回生制御することにより、各駆動輪に付与する駆動トルク又は制動トルクを個別に制御して、車両の駆動力配分を走行状態に応じて適宜制御することができる。
【0003】
そして、このように各駆動輪に付与する駆動トルク又は制動トルクを個別に制御できる、すなわち、駆動力配分を制御できることを利用して、車体の挙動変化を抑制する制御装置が提案されている。例えば、下記特許文献1には、路面の段差等を通過するときに発生するピッチ挙動に伴う車両の上下方向の振動(ピッチレート)を抑制するとともにヨー方向のヨー挙動を安定させるために、各駆動輪に異なる制駆動力を付与して、車両の重心回りに生じるピッチモーメント及びヨーモーメントの発生を制御する車両の制駆動力制御装置が示されている。又、下記特許文献2には、モータの最大出力と必要出力との差が小さくなるように、複数のモータを使い分けることにより、低負荷走行時のモータの効率を向上させる電気自動車の駆動装置が示されている。更に、下記特許文献3には、電動機の温度が理想温度に近づいて電動機の電力効率が向上するように電動機の出力を制御する電動車輛の駆動力制御装置が示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2007−118898号公報
【特許文献2】特開平5−76106号公報
【特許文献3】特開2007−124832号公報
【発明の概要】
【0005】
ところで、上記特許文献1に記載された従来の制御装置では、路面の段差等を通過するときに発生するピッチ挙動に伴う車両の上下方向の振動(ピッチレート)を抑制するとともにヨー方向のヨー挙動を安定させるために、各駆動輪に駆動力を付与する電動モータを制御して異なる制駆動力を付与し、車両の重心回りに生じるピッチモーメント及びヨーモーメントの発生を制御する。この場合、車体の挙動変化を抑制するために電動モータを制御するときには、急激に消費電力が増加したり電動モータの発熱量が増加する可能性がある。すなわち、車体の挙動変化を抑制する場合においては、各輪に駆動力を伝達する電動モータを効率の良好な領域外で制御しなければならない状況が生じるため、急激に消費電力や発熱量が増加し、或いは、走行中の車両に何らかの影響を及ぼす可能性がある。
【0006】
本発明は、上記した問題に対処するためになされたものであり、その目的は、電動機の効率を勘案して駆動力を制御することにより、車両を適切に走行させるとともに車体に発生する挙動を制御する車両の駆動力制御装置を提供することにある。
【0007】
上記目的を達成するために、本発明の特徴は、車両のバネ下に配置された各輪に連結されて独立して駆動力を伝達する電動機と、前記電動機から前記各輪にそれぞれ独立して伝達される駆動力を制御して車両を走行させるための走行用駆動力及び車両のバネ上に配置された車体に発生した挙動を制御するための制御力を前記前輪及び後輪に発生させる制御手段とを備えた車両の駆動力制御装置において、前記制御手段が、前記走行用駆動力に対応して前記電動機に発生させるトルクを表す車両加減速制御指令値と、前記制御力に対応して前記電動機に発生させるトルクを表す車体挙動制御指令値とを演算し、前記電動機に関し、供給される電力に対する出力の比を表す効率を決定し、前記決定した効率を用いて前記車体挙動制御指令値によって表されるトルクを補正することにある。尚、この場合、前記制御手段が、前記走行用駆動力に対応して前記電動機に発生させるトルクを表す車両加減速制御指令値を演算する車両加減速制御指令値演算手段と、前記制御力に対応して前記電動機に発生させるトルクを表す車体挙動制御指令値を演算する車体挙動制御指令値演算手段と、前記電動機に関し、供給される電力に対する出力の比を表す効率を決定する効率決定手段と、前記効率決定手段によって決定された効率を用いて前記車体挙動制御指令値によって表されるトルクを補正するトルク補正手段とを備えることが可能である。
【0008】
この場合、前記効率は、例えば、電動機の回転数と出力するトルクの大きさとによって決定されるものであり、前記制御手段は、前記車体挙動制御指令値によって表されるトルクの大きさを用いて前記効率を決定することができる。尚、この場合、前記効率決定手段は、前記車体挙動制御指令値演算手段によって演算された前記車体挙動制御指令値によって表されるトルクの大きさを用いて前記効率を決定することができる。
【0009】
又、これらの場合、前記効率は、例えば、電動機の回転数と出力するトルクの大きさとによって決定されるものであり、前記制御手段は、前記電動機の回転数に対応する車両の車速を用いて前記効率を決定することができる。尚、この場合、前記制御手段は、少なくとも、車両の車速を検出する検出手段を備えており、前記効率決定手段は、前記検出手段によって検出されて前記電動機の回転数に対応する車両の車速を用いて前記効率を決定することができる。
【0010】
又、これらの場合、前記制御手段は、例えば、前記効率を前記各輪に独立して駆動力を伝達する前記電動機ごとに決定し、この決定した前記電動機ごとの前記効率のうち、最も低い値の効率を選択して前記車体挙動制御指令値によって表されるトルクを補正することができる。尚、この場合、前記効率決定手段は、前記各輪に独立して駆動力を伝達する前記電動機ごとに前記効率を決定するとともにこの決定した前記電動機ごとの前記効率のうち最も低い値の効率を選択し、前記トルク補正手段は、前記効率決定手段によって選択されて決定された前記最も低い値の効率を用いて前記車体挙動制御指令値によって表されるトルクを補正することができる。
【0011】
又、前記制御手段は、例えば、前記効率を前記各輪に独立して駆動力を伝達する前記電動機ごとに決定し、この決定した前記電動機ごとの前記効率を平均した効率を用いて前記車体挙動制御指令値によって表されるトルクを補正することもできる。尚、この場合、前記効率決定手段は、前記各輪に独立して駆動力を伝達する前記電動機ごとに前記効率を決定するとともにこの決定した前記電動機ごとの前記効率を平均した効率を選択し、前記トルク補正手段は、前記効率決定手段によって選択されて決定された前記平均した効率を用いて前記車体挙動制御指令値によって表されるトルクを補正することができる。
【0012】
更に、これらの場合、前記制御手段は、運転者による車両を走行させるための操作状態及び前記車体に発生した運動状態に基づいて前記車体の挙動を制御するための目標運動状態量を演算し、前記演算した目標運動状態量を実現するように前記前輪及び後輪に配分される前記制御力を演算することができる。尚、この場合、前記制御手段が、更に、運転者による車両を走行させるための操作状態を検出する操作状態検出手段と、車両走行時における前記車体に発生した運動状態を検出する運動状態検出手段と、少なくとも前記操作状態検出手段によって検出された前記操作状態及び前記運動状態検出手段によって検出された前記運動状態を入力する入力手段と、前記入力手段によって入力された前記操作状態及び前記運動状態に基づいて、前記車体の挙動を制御するための目標運動状態量を演算し、この演算された目標運動状態量を実現するように前記各輪に配分される前記制御力を演算する駆動力配分演算手段とを備えることができる。
【0013】
この場合、前記演算した目標運動状態量を実現するように前記前輪及び後輪に配分される前記制御力は、大きさが同一であり、かつ、逆向きとすることができる。
【0014】
これらによれば、車両を走行させる基本性能に関し、電動機は、車両加減速制御指令値によって表されるトルクを発生することにより、車両を走行させるための走行用駆動力を各輪に発生させることができる。これにより、車両加減速制御指令値によって表されるトルクは効率を勘案することなく決定されて(言い換えれば、効率が良好な領域にて)電動機が発生するため、車両は、例えば、運転者による意図を反映した走行用駆動力によって適切に走行して基本性能を適切に発揮することができる。
【0015】
一方、車体に発生した挙動を制御するための制御力に対応して、電動機に発生させるトルクを表す車体挙動制御指令値は、供給される電力に対する出力の比を表す電動機の効率を用いて補正される。この場合、電動機の効率は、電動機の回転数と出力するトルクの大きさとによって決定されるものであり、補正前の車体挙動制御指令値によって表されるトルクや電動機の回転数(或いは回転速度)に対応する車両の車速(或いは車輪速度)のうちの少なくとも一方を用いて容易に決定することができる。又、この場合、補正に用いられる効率としては、各輪に駆動力を独立的に伝達する電動機ごとに決定された効率のうちで最も低い値の効率や、電動機ごとに決定された効率を平均した効率を用いることができる。
【0016】
これにより、車体の挙動を制御することに関し、電動機は、電動機の効率によって補正された車体挙動制御指令値によって表される補正されたトルクを発生することにより、電動機の効率を勘案して車体の挙動を制御するための制御力を各輪に発生させることができる。すなわち、車体の挙動を制御する状況のように、一時的に電動機を効率の良好な領域外で制御しなければならない状況では、車体の挙動制御のみについて効率を一時的に低くして電動機による制御力(制御量)を低下させることができ、これにより、電動機の消費電力や発熱量が急激に増加することを効果的に防止することができる。又、車体に発生した挙動を制御するための制御力に対応して電動機に発生させるトルクを表す車体挙動制御指令値のみを効率を用いて補正するため、車両加減速制御指令値によって表されるトルクすなわち走行用駆動力で走行中の車両に与える影響を大幅に低減することができる。
【図面の簡単な説明】
【0017】
【図1】本発明の車両の駆動力制御装置を適用可能な車両の構成を概略的に示す概略図である。
【図2】本発明の実施形態に係り、図1の電子制御ユニットにて実行される駆動力制御のコンピュータプログラム処理を機能的に表す機能ブロック図である。
【図3】図1の電子制御ユニットにて実行される駆動力制御の流れを示すフローチャートである。
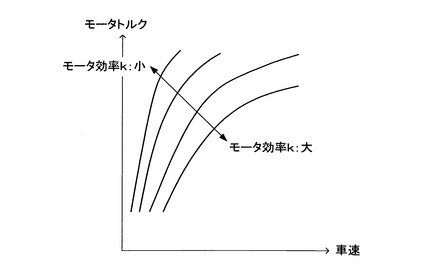
【図4】モータトルクと車速(インホイールモータの回転数(回転速度))とによって決定されるモータ効率を説明するためのグラフである。
【発明を実施するための形態】
【0018】
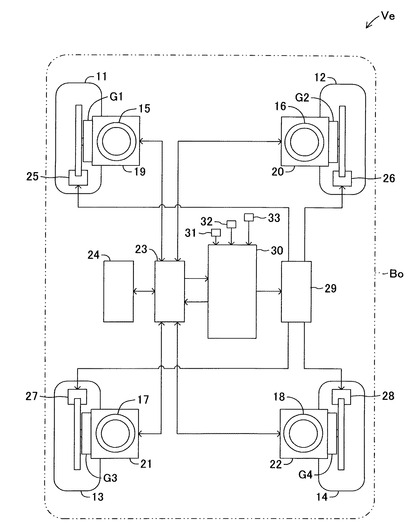
以下、本発明の実施形態を、図面を用いて詳細に説明する。図1は、本実施形態に係る車両の駆動力制御装置が搭載される車両Veの構成を概略的に示している。
【0019】
車両Veは、左右前輪11,12及び左右後輪13,14を備えている。そして左右前輪11,12は、互いに又はそれぞれ独立してサスペンション機構15,16を介して車両Veのバネ上としての車体Boに支持されている。又、左右後輪13,14は、互いに又はそれぞれ独立してサスペンション機構17,18を介して車両Veの車体Boに支持されている。
【0020】
ここで、サスペンション機構15〜18の構成については、本発明に直接関係しないため、その詳細な説明を省略するが、例えば、ショックアブソーバを内蔵したストラット、コイルスプリング及びサスペンションアーム等から構成されるストラット型サスペンションや、コイルスプリング、ショックアブソーバ及び上下のサスペンションアーム等から構成されるウィッシュボーン型サスペンション等の公知のサスペンションを採用することができる。
【0021】
左右前輪11,12のホイール内部には電動機19,20が、又、左右後輪13,14のホイール内部には電動機21,22がそれぞれ組み込まれていて、それぞれ左右前輪11,12及び左右後輪13,14に対して、例えば、複数のギアから構成される周知の減速機構G1〜G4を介して動力伝達可能に連結されている。すなわち、電動機19〜22は、所謂、インホイールモータ19〜22であり、左右前輪11,12及び左右後輪13,14とともに車両Veのバネ下に配置されている。そして、各インホイールモータ19〜22の回転をそれぞれ独立して制御することにより、左右前輪11,12及び左右後輪13,14に発生させる駆動力(駆動トルク)及び制動力(制動トルク)をそれぞれ独立して制御することができるようになっている。
【0022】
これらの各インホイールモータ19〜22は、例えば、交流同期モータにより構成されていて、インバータ23を介して、バッテリやキャパシタ等の蓄電装置24の直流電力が交流電力に変換され、その交流電力が各インホイールモータ19〜22に供給されることにより各インホイールモータ19〜22が駆動(すなわち力行)されて、左右前輪11,12及び左右後輪13,14に対してそれぞれ各減速機構G1〜G4を介して駆動トルクが付与する。又、各インホイールモータ19〜22は、左右前輪11,12及び左右後輪13,14の回転エネルギーを利用して回生制御することも可能である。すなわち、各インホイールモータ19〜22の回生・発電時には、各減速機構G1〜G4を介して左右前輪11,12及び左右後輪13,14の回転が各インホイールモータ19〜22に伝達され、伝達された回転に伴う回転(運動)エネルギーが各インホイールモータ19〜22によって電気エネルギーに変換され、その際に生じる電力がインバータ23を介して蓄電装置24に蓄電される。このとき、左右前輪11,12及び左右後輪13,14には、回生・発電力に基づく制動トルクが付与される。
【0023】
又、各輪11〜14と、これらに対応する各インホイールモータ19〜22との間には、それぞれ、ブレーキ機構25,26,27,28が設けられている。各ブレーキ機構25〜28は、例えば、ディスクブレーキやドラムブレーキ等の公知の制動装置である。そして、これらのブレーキ機構25〜28は、例えば、図示を省略するマスタシリンダから圧送される油圧により、各輪11〜14に制動力を生じさせるブレーキキャリパのピストンやブレーキシュー(ともに図示省略)等を作動させるブレーキアクチュエータ29に接続されている。
【0024】
上記インバータ23及びブレーキアクチュエータ29は、各インホイールモータ19〜22の回転状態(駆動状態)、及び、ブレーキ機構25〜28の動作状態等を制御する電子制御ユニット30にそれぞれ接続されている。従って、電子制御ユニット30は本発明の制御手段を構成する。
【0025】
電子制御ユニット30は、CPU、ROM、RAM等からなるマイクロコンピュータを主要構成部品とするものであり、後述するプログラムを含む各種プログラムを実行するものである。このため、電子制御ユニット30には、運転者による車両Veを走行させるための操作状態を検出する操作状態検出手段としての操作状態検出センサ31、走行している車両Veの車体Bo(バネ上)に発生した運動状態を検出する運動状態検出手段としての運動状態検出センサ32、走行している車両Veに作用する外乱を検出する外乱検出センサ33を含む各種センサからの各信号及びインバータ23からの信号が入力されるようになっている。
【0026】
ここで、操作状態検出センサ31は、運転者による各種操作に関連する操作量、例えば、図示を省略する操舵ハンドルに対する運転者の操作量(操舵角)を検出する操舵角センサや操作速度(操舵速度)を検出する操舵速度センサ、図示を省略するアクセルペダルに対する運転者による操作量(踏み込み量や、角度、圧力等)を検出するアクセルセンサ、図示を省略するブレーキペダルに対する運転者による操作量(踏み込み量や、角度、圧力等)を検出するブレーキセンサ等から構成される。又、運動状態検出センサ32は、走行している車両Veの運動状態量、例えば、車体Bo(バネ上)の上下方向における上下加速度を検出するバネ上上下加速度センサや、車体Boの左右方向における横加速度を検出する横加速度センサ、車体Bo(車両Ve)の車速(或いは車輪速度)を検出する車速センサ、或いは、車体Bo(車両Ve)に発生したヨーレートを検出するヨーレートセンサ、車体Bo(車両Ve)に発生したピッチレートを検出するピッチレートセンサ、車体Bo(車両Ve)に発生したロールレートを検出するロールレートセンサ等から構成される。更に、外乱検出センサ33は、例えば、各サスペンション機構15〜18のストローク量を検出するストロークセンサや、各輪11〜14を含む車両Veのバネ下の上下方向における上下加速度を検出するバネ下上下加速度センサ等から構成される。
【0027】
このように、電子制御ユニット30に対して上記各センサ31〜33及びインバータ23が接続されて各信号が入力されることにより、電子制御ユニット30は車両Veの走行状態及び車体Boの挙動を把握して制御することができる。以下、電子制御ユニット30による車両Veの走行状態及び車体Boの挙動状態の制御を詳細に説明する。
【0028】
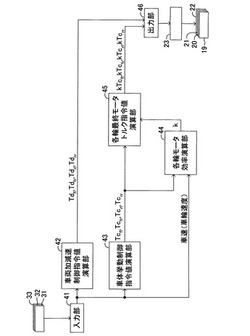
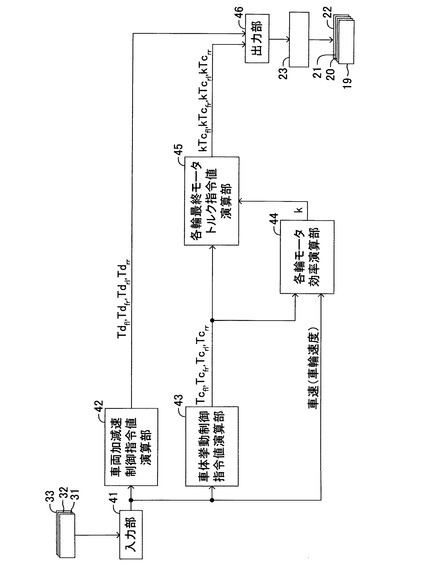
本実施形態における電子制御ユニット30は、各インホイールモータ19〜22のそれぞれが発生する駆動力(又は制動力)の配分を適切に制御することにより、車両Veを加減速させて走行させるとともに車体Bo(バネ上)に発生した挙動、例えば、上下方向の振動挙動(ヒーブ挙動)や、ピッチ挙動、ロール挙動、ヨー挙動等を制御する。このため、電子制御ユニット30は、図2に示すように、入力手段としての入力部41、車両加減速制御値演算手段としての車両加減速制御指令値演算部42、車体挙動制御値演算手段及び駆動力配分演算手段としての車体挙動制御指令値演算部43、効率演算手段としての各輪モータ効率演算部44、トルク補正手段としての各輪最終モータトルク指令値演算部45及び出力手段としての出力部46を備えている。
【0029】
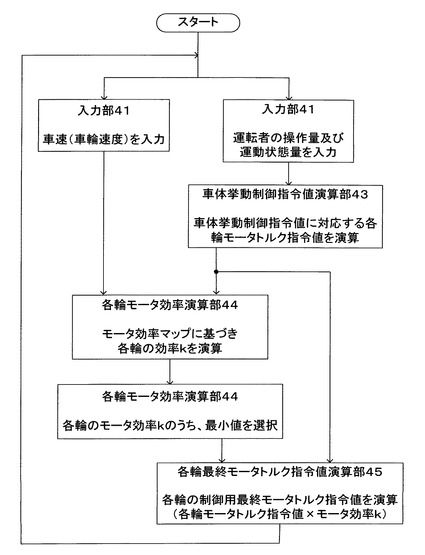
入力部41においては、操作状態検出センサ31、運動状態検出センサ32及び外乱検出センサ33のそれぞれから信号を入力する。そして、入力部41は、操作状態検出センサ31から入力した信号に基づいて、例えば、運転者による操舵ハンドルの操作量(操舵角、操舵速度)や、アクセルペダルの操作に伴うアクセル操作量、ブレーキペダルの操作に伴うブレーキ操作量等を取得する。又、入力部41は、運動状態検出センサ32から入力した信号に基づいて、例えば、車体Bo(車両Ve)の車速(或いは車輪速度)や、車体Boにおける上下方向の加速度、ロールレート、ピッチレート及びヨーレート等を取得する。更に、入力部41は、外乱検出センサ33から入力した信号に基づいて、例えば、車両Veが走行している路面の凹凸の大きさや車両Veに対する横風の影響の大きさ等を取得する。このように、各種検出値を入力して取得すると、入力部41は、取得した各種検出値を車両加減速制御指令値演算部42及び車体挙動制御指令値演算部43に出力するとともに、車両Veの車速(或いは車輪速度)を各輪モータ効率演算部44に供給する。以下、まず、車両加減速制御指令値演算部42による車両Veの走行状態の制御から説明する。
【0030】
車両加減速制御指令値演算部42は、入力部41から供給される各種検出値のうち、運転者によるアクセルペダルの操作に伴うアクセル操作量に応じた走行用駆動力、すなわち、運転者の意図に応じて車両Veを走行(加速)させるために各インホイールモータ19〜22が発生すべき駆動力として、左前輪11における左前駆動力Fdfl、右前輪12における右前駆動力Fdfr、左後輪13における左後駆動力Fdrl及び右後輪14における右後駆動力Fdrrを演算する。一方、車両加減速制御指令値演算部42は、入力部41から供給される各種検出値のうち、運転者によるブレーキペダルの操作に伴うブレーキ操作量に応じた走行用駆動力、すなわち、運転者の意図に応じて車両Veを走行(減速)させるために各インホイールモータ19〜22が発生すべき制動力として、左前輪11における左前制動力Fdfl、右前輪12における右前制動力Fdfr、左後輪13における左後制動力Fdrl及び右後輪14における右後制動力Fdrrを演算する。そして、車両加減速制御指令値演算部42は、例えば、各輪11〜14のタイヤ半径や減速機構G1〜G4のギア比を用いて、走行用駆動力であるFdfl,Fdfr,Fdrl,Fdrrに対応して各インホイールモータ19〜22が発生すべき車両加減速制御指令値としての制駆動用モータトルク指令値Tdfl,Tdfr,Tdrl,Tdrrを演算し、この演算した制駆動用モータトルク指令値Tdfl,Tdfr,Tdrl,Tdrrを出力部46に出力する。これにより、車両Veは、運転者が意図する加減速の合わせて走行することができる。
【0031】
次に、車体挙動制御指令値演算部43、各輪モータ効率演算部44及び各輪最終モータトルク指令値演算部45によって実現される車体Bo(バネ上)に発生した挙動の制御(挙動制御)について、図2及び図3を用いて詳細に説明する。尚、以下の説明においては、車体Bo(バネ上)に発生した挙動を制御するための駆動力(又は制動力)を制御力とも称呼する。
【0032】
車体挙動制御指令値演算部43は、入力部41から供給される前記各種検出値のうち、運動状態検出センサ32から入力した信号に基づいて、例えば、車体Bo(車両Ve)の車速(車輪速度)や、車体Boにおけるピッチレート、ロールレート及びヨーレート等を取得する。そして、車体挙動制御指令値演算部43は、公知の演算手法に従って、車体Boに発生した挙動を制御するための制御目標値として、例えば、目標ピッチモーメントMy、目標ロールモーメントMx及び目標ヨーモーメントMz等を演算する。このように、目標ピッチモーメントMy、目標ロールモーメントMx及び目標ヨーモーメントMz等を演算すると、車体挙動制御指令値演算部43は、目標ロールモーメントMx、目標ピッチモーメントMy及び目標ヨーモーメントMzを車両Veの重心位置にて発生させるために、各輪11〜14に制御力(駆動力又は制動力)を配分し、左前輪11における制御力Fcfl、右前輪12における制御力Fcfr、左後輪13における制御力Fcrl及び右後輪14における制御力Fcrrを演算する。尚、この駆動力の配分については、従来から知られているように、例えば、車両Veにおける各輪11〜14及びサスペンション機構15〜18の幾何学的な配置に基づいて決定されるものである。そして、車体挙動制御指令値演算部43は、例えば、各輪11〜14のタイヤ半径や減速機構G1〜G4のギア比を用いて、各制御力Fcfl,Fcfr,Fcrl,Fcrrに対応して各インホイールモータ19〜22が発生すべき車体挙動制御指令値としての制御用モータトルク指令値Tcfl,Tcfr,Tcrl,Tcrrを演算し、この演算した制御用モータトルク指令値Tcfl,Tcfr,Tcrl,Tcrrを各輪モータ効率演算部44及び各輪最終モータトルク指令値演算部45に出力する。
【0033】
各輪モータ効率演算部44においては、車体挙動制御指令値演算部43から出力された制御用モータトルク指令値Tcfl,Tcfr,Tcrl,Tcrrを取得するとともに、入力部41から車両Veの車速(或いは車輪速度)を取得する。そして、各輪モータ効率演算部44は、車速(すなわち、モータ回転数(回転速度))とモータトルクとによって決定されるモータ効率kを、前記取得した制御用モータトルク指令値Tcfl,Tcfr,Tcrl,Tcrr及び車速を用いて各輪11〜14(より詳しくは、インホイールモータ19〜22)について演算する。ここで、モータ効率kは、モータに供給した電力(電気エネルギー)に対してモータが出力する駆動力(機械エネルギー)の比を表すものであり、「0」〜「1」の値を有するものである。
【0034】
具体的に、モータ効率kの演算を説明すると、各輪モータ効率演算部44は、例えば、例示的に図4に示すように、実験的又は論理的に予め設定されるモータ効率マップを参照する。ここで、例示的に図4に示すモータ効率マップでは、車両Veの車速(言い換えれば、インホイールモータの回転数(回転速度))が大きくなるほどモータ効率kが大きく(すなわち効率が高く)なり、車両Veの車速が小さくなるほどモータ効率kが小さく(すなわち効率が低く)なる傾向を有する。又、例示的に図4に示すモータ効率マップでは、モータトルクが大きくなるほどモータ効率kが小さく(すなわち効率が低く)なり、モータトルクが小さくなるほどモータ効率kが大きく(すなわち効率が高く)なる傾向を有する。従って、図4に示すように、車速(インホイールモータの回転数(回転速度))が大きくモータトルクが小さくなるほどモータ効率kが大きく(すなわち効率が高く)なり、車速(インホイールモータの回転数(回転速度))が小さくモータトルクが大きくなるほどモータ効率kが小さく(すなわち効率が低く)なる傾向を有する。
【0035】
そして、各輪モータ効率演算部44は、例えば、左前輪11(インホイールモータ19)について、図4に示したモータ効率マップ上にて、前記取得した制御用モータトルク指令値Tcflと前記取得した車速とを用いてモータ効率kを決定する。同様に、各輪モータ効率演算部44は、右前輪12(インホイールモータ20)、左後輪13(インホイールモータ21)及び右後輪14(インホイールモータ22)について、モータ効率kを決定する。ここで、本実施形態においては、各輪モータ効率演算部44が、前記取得した制御用モータトルク指令値Tcfl,Tcfr,Tcrl,Tcrrと前記取得した車速(インホイールモータの回転数(回転速度))との両方を用いてモータ効率kを一義的に決定するように実施した。この場合、前記取得した制御用モータトルク指令値Tcfl,Tcfr,Tcrl,Tcrr及び前記取得した車速(インホイールモータの回転数(回転速度))のうちのいずれか一方を用いて、モータ効率マップ上にてモータ効率kを決定するように実施することも可能である。
【0036】
ところで、一般に、インホイールモータは、車両の設計に合わせて、車両を走行させる際に使用するモータトルク領域及びモータ回転数(回転速度)領域においてモータ効率が最もよくなるように設計される。従って、例えば、車両Veを走行させるために、上述したように、インホイールモータ19〜22が制駆動用モータトルク指令値Tdfl,Tdfr,Tdrl,Tdrrを発生する場合には、モータ効率kは高くなる。しかしながら、車体Boの挙動を制御するために各輪11〜14に設けられた各インホイールモータ19〜22が制御力Fcfl,Fcfr,Fcrl,Fcrrすなわち制駆動用モータトルク指令値Tcfl,Tcfr,Tcrl,Tcrrを発生する場合には、車体Boに生じた挙動変化に基づいて制駆動用モータトルク指令値Tcfl,Tcfr,Tcrl,Tcrrが決定されるものであるため、その大きさ及び作用方向は通常それぞれで異なる。従って、車体Boに生じる挙動変化によっては、各インホイールモータ19〜22を通常では使用しない領域で作動させる可能性があり、それぞれのインホイールモータ19〜22のモータ効率kが異なる。ここで、モータ効率kが低くなると、一般に、消費電力が増加したり、発熱量が増加する。
【0037】
このため、各輪モータ効率演算部44は、消費電力や発熱量の増加を抑制し、効率よくインホイールモータ19〜22を作動させるために、上述したように決定した(演算した)各輪11〜14(各インホイールモータ19〜22)の4つのモータ効率kのうちで、最も値の小さい(効率の低い)モータ効率kを選択する。そして、各輪モータ効率演算部44は、この選択したモータ効率kを各輪最終モータトルク指令値演算部45に出力する。
【0038】
各輪最終モータトルク指令値演算部45においては、車体挙動制御指令値演算部43から制御用モータトルク指令値Tcfl,Tcfr,Tcrl,Tcrrを取得するとともに、各輪モータ効率演算部44から前記選択された最小値となるモータ効率kを取得する。そして、各輪最終モータトルク指令値演算部45は、取得したそれぞれの制御用モータトルク指令値Tcfl,Tcfr,Tcrl,Tcrrに対して前記モータ効率kを乗算することにより、制御用最終モータトルク指令値kTcfl,kTcfr,kTcrl,kTcrrを演算する。これにより、各輪11〜14においては、制御力として、kFcfl,kFcfr,kFcrl,kFcrrが発生するようになる。
【0039】
ここで、このように、4つのインホイールモータ19〜22のモータ効率kのうちで最小値となるモータ効率kを制御用モータトルク指令値Tcfl,Tcfr,Tcrl,Tcrrに対して乗算すると、各インホイールモータ19〜22によって発生される制御力Fcfl,Fcfr,Fcrl,Fcrrが低下するため、車体Boの挙動変化に対する制御量が低減することになる。しかし、車体Boに生じる挙動変化に起因して各インホイールモータ19〜22を通常では使用しない領域で定常的に作動させることはなく、一時的なものであるため、一時的に制御量を低減させても、車体の挙動制御に与える影響は限定的となる。又、走行している車両Veの車体Boに生じる挙動変化は連続的に変化するものであるため、一時的に各インホイールモータ19〜22の制御量を低減させることに伴って、一時的に低下したモータ効率kが速やかに適切なモータ効率kに復帰する。これにより、モータ効率kが低い状態で作動させる頻度を少なくして、言い換えれば、モータ効率kが高い状態で作動させる頻度を多くして、各インホイールモータ19〜22を作動させることができ、その結果、消費電力の増加及び発熱量の増加を適切に抑制することができる。そして、各輪最終モータトルク指令値演算部45は、演算した制御用最終モータトルク指令値kTcfl,kTcfr,kTcrl,kTcrrを出力部46に出力する。
【0040】
出力部46においては、車両加減速制御指令値演算部42によって演算された制駆動用モータトルク指令値Tdfl,Tdfr,Tdrl,Tdrrと、各輪最終モータトルク指令値演算部45によって演算された制御用最終モータトルク指令値kTcfl,kTcfr,kTcrl,kTcrrとを合算する。そして、出力部46は、合算したモータトルク指令値(Tdfl+kTcfl),(Tdfr+kTcfr),(Tdrl+kTcrl),(Tdrr+kTcrr)に対応する駆動信号をインバータ23に出力する。そして、インバータ23は、各インホイールモータ19〜22に対して供給する駆動電力(駆動電流)を制御して各インホイールモータ19〜22を駆動させる。これにより、各輪11〜14においては、それぞれ、車両加減速制御指令値演算部42によって演算された各駆動力又は制動力であるFdfl,Fdfr,Fdrl,Fdrrが発生するとともに、各輪最終モータトルク指令値演算部45によって演算された制御用最終モータトルク指令値kTcfl,kTcfr,kTcrl,kTcrrに対応する制御力kFcfl,kFcfr,kFcrl,kFcrrが発生する。その結果、車両Veを運転者による操作状態(意図)に応じて適切に走行させることができるとともに、車体Boにおける挙動、例えば、上下方向の振動挙動(バウンシング挙動)や、ピッチ挙動、ロール挙動、ヨー挙動等を制御することができる。
【0041】
以上の説明からも理解できるように、上記実施形態によれば、車両Veを走行させることに関し、各インホイールモータ19〜22は、制駆動用モータトルク指令値Tdfl,Tdfr,Tdrl,Tdrrによって表されるモータトルクを発生することにより、車両を走行させるための走行用駆動力Fdfl,Fdfr,Fdrl,Fdrrを各輪11〜14に発生させることができる。これにより、制駆動用モータトルク指令値Tdfl,Tdfr,Tdrl,Tdrrはモータ効率kを勘案することなく決定されて各インホイールモータ19〜22が発生するため、車両Veは、例えば、運転者による意図を反映した走行用駆動力Fdfl,Fdfr,Fdrl,Fdrrによって適切に走行することができる。
【0042】
一方、車体Boに発生した挙動を制御するための制御力Fcfl,Fcfr,Fcrl,Fcrrに対応して各インホイールモータ19〜22に発生させるモータトルクを表す制御用モータトルク指令値Tcfl,Tcfr,Tcrl,Tcrrは、モータ効率kを用いて補正される。これにより、車体Boの挙動を制御することに関し、各インホイールモータ19〜22は、モータ効率kによって補正された制御用最終モータトルク指令値kTcfl,kTcfr,kTcrl,kTcrrによって表される補正されたモータトルクを発生することにより、インホイールモータ19〜22のモータ効率kを勘案して車体Boの挙動を制御するための制御力kFcfl,kFcfr,kFcrl,kFcrrを各輪11〜14に発生させることができる。すなわち、車体Boの挙動を制御する状況のように、一時的にインホイールモータ19〜22のうちのいずれかをモータ効率kの良好な領域外で制御しなければならない状況では、車体Boの挙動制御のみについてモータ効率kを一時的に低くして各インホイールモータ19〜22による制御力Fdfl,Fdfr,Fdrl,Fdrr(制御量)を低下させることができ、これにより、各インホイールモータ19〜22の消費電力や発熱量が急激に増加することを効果的に防止することができる。又、車体Boに発生した挙動を制御するための制御力Fdfl,Fdfr,Fdrl,Fdrrに対応して各インホイールモータ19〜22に発生させる制御用モータトルク指令値Tcfl,Tcfr,Tcrl,Tcrrのみをモータ効率kを用いて補正するため、制駆動用モータトルク指令値Tdfl,Tdfr,Tdrl,Tdrrすなわち走行用駆動力Fdfl,Fdfr,Fdrl,Fdrrで走行中の車両Veに与える影響を大幅に低減することができる。
【0043】
ここで、上記実施形態においては、図3に具体的に示したように、各輪モータ効率演算部44が、各輪11〜14(具体的には、各インホイールモータ19〜22)のモータ効率kのうち、最小値となるモータ効率kを選択するように実施した。ところで、例えば、左右前後輪11,12,13,14のうちの3輪におけるモータ効率kは高いにもかかわらず、1輪のみのモータ効率kが著しく小さい状況が生じる可能性がある。この場合、上述したように、最小値のモータ効率kを選択して全インホイールモータ19〜22の作動を制御すると、3輪のモータ効率kを大幅に低減させるために大きな無駄が発生してしまう可能性がある。
【0044】
従って、各輪モータ効率演算部44は、最小値のモータ効率kを選択することに代えて、又は、加えて、左右前後輪11,12,13,14のそれぞれのモータ効率kを平均化し、この平均化したモータ効率kを選択するように実施することも可能である。これによれば、上述したような1輪のみのモータ効率kが著しく小さい状況において、発生する無駄を可能な限り小さくすることができ、上記実施形態と同様の効果が期待できる。
【0045】
本発明の実施にあたっては、上記実施形態に限定されるものではなく、本発明の目的を逸脱しない限りにおいて種々の変更が可能である。
【0046】
例えば、上記実施形態においては、電子制御ユニット30(より詳しくは、車体挙動制御指令値演算部43)が制御力Fcfl,Fcfr,Fcrl,Fcrrすなわち制駆動用モータトルク指令値Tcfl,Tcfr,Tcrl,Tcrrをそれぞれ独立して制御するように実施した。この場合、車両Veの前後方向運動に影響を与えない、言い換えれば、車両Veに加減速度を生じさせないように、左右前輪11,12側で発生させる制御力Fcfl,Fcfrと左右後輪13,14側で発生させる制御力Fcrl,Fcrrとを互いに逆方向であり、かつ、その絶対値を同一として実施することも可能である。これにより、左右前輪11,12側で発生させる制御力Fcfl,Fcfrと左右後輪13,14側で発生させる制御力Fcrl,Fcrrとで駆動力差(又は制動力差)が互いに相殺し合うため、車両Veを走行させるために必要な駆動力(又は制動力)Fdfl,Fdfr,Fdrl,Fdrrが減少することを効果的に防止することができるとともに、上記実施形態と同様の効果を得ることができる。
【0047】
又、上記実施形態においては、電子制御ユニット30(より詳しくは、車体挙動制御指令値演算部43)が制御力Fcfl,Fcfr,Fcrl,Fcrrすなわち制駆動用モータトルク指令値Tcfl,Tcfr,Tcrl,Tcrrをそれぞれ独立して制御するように実施した。この場合、例えば、電子制御ユニット30(より詳しくは、車体挙動制御指令値演算部43)が、左右前輪11,12が協働して発生させる前輪側の制御力(駆動力又は制動力)と左右後輪13,14が協働して発生させる後輪側の制御力(駆動力又は制動力)をそれぞれ演算するように実施することも可能である。これによっても、上記実施形態と同様の効果を得ることができる。
【符号の説明】
【0048】
11,12…前輪、13,14…後輪、15,16,17,18…サスペンション機構、19,20,21,22…電動機(インホイールモータ)、23…インバータ、24…蓄電装置、25,26,27,28…ブレーキ機構、29…ブレーキアクチュエータ、30…電子制御ユニット、31…操作状態検出センサ、32…運動状態検出センサ、33…外乱検出センサ、41…入力部、42…車両加減速制御指令値演算部、43…車体挙動制御指令値演算部、44…各輪モータ効率演算部、45…各輪最終モータトルク指令値演算部、46…出力部、G1,G2,G3,G4…減速機構、Ve…車両、Bo…車体
【技術分野】
【0001】
本発明は、車両の各輪で発生させる駆動力を配分して個別に制御する車両の駆動力制御装置に関する。
【背景技術】
【0002】
近年、電気自動車の一形態として、車輪のホイール内部もしくはその近傍に電動機(電気モータ)を配置し、この電動機により車輪を直接駆動する、所謂、インホイールモータ方式の車両が開発されている。このインホイールモータ方式の車両においては、各輪(駆動輪)ごとに設けた電動機を個別に回転制御する、すなわち、各電動機を個別に力行制御又は回生制御することにより、各駆動輪に付与する駆動トルク又は制動トルクを個別に制御して、車両の駆動力配分を走行状態に応じて適宜制御することができる。
【0003】
そして、このように各駆動輪に付与する駆動トルク又は制動トルクを個別に制御できる、すなわち、駆動力配分を制御できることを利用して、車体の挙動変化を抑制する制御装置が提案されている。例えば、下記特許文献1には、路面の段差等を通過するときに発生するピッチ挙動に伴う車両の上下方向の振動(ピッチレート)を抑制するとともにヨー方向のヨー挙動を安定させるために、各駆動輪に異なる制駆動力を付与して、車両の重心回りに生じるピッチモーメント及びヨーモーメントの発生を制御する車両の制駆動力制御装置が示されている。又、下記特許文献2には、モータの最大出力と必要出力との差が小さくなるように、複数のモータを使い分けることにより、低負荷走行時のモータの効率を向上させる電気自動車の駆動装置が示されている。更に、下記特許文献3には、電動機の温度が理想温度に近づいて電動機の電力効率が向上するように電動機の出力を制御する電動車輛の駆動力制御装置が示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2007−118898号公報
【特許文献2】特開平5−76106号公報
【特許文献3】特開2007−124832号公報
【発明の概要】
【0005】
ところで、上記特許文献1に記載された従来の制御装置では、路面の段差等を通過するときに発生するピッチ挙動に伴う車両の上下方向の振動(ピッチレート)を抑制するとともにヨー方向のヨー挙動を安定させるために、各駆動輪に駆動力を付与する電動モータを制御して異なる制駆動力を付与し、車両の重心回りに生じるピッチモーメント及びヨーモーメントの発生を制御する。この場合、車体の挙動変化を抑制するために電動モータを制御するときには、急激に消費電力が増加したり電動モータの発熱量が増加する可能性がある。すなわち、車体の挙動変化を抑制する場合においては、各輪に駆動力を伝達する電動モータを効率の良好な領域外で制御しなければならない状況が生じるため、急激に消費電力や発熱量が増加し、或いは、走行中の車両に何らかの影響を及ぼす可能性がある。
【0006】
本発明は、上記した問題に対処するためになされたものであり、その目的は、電動機の効率を勘案して駆動力を制御することにより、車両を適切に走行させるとともに車体に発生する挙動を制御する車両の駆動力制御装置を提供することにある。
【0007】
上記目的を達成するために、本発明の特徴は、車両のバネ下に配置された各輪に連結されて独立して駆動力を伝達する電動機と、前記電動機から前記各輪にそれぞれ独立して伝達される駆動力を制御して車両を走行させるための走行用駆動力及び車両のバネ上に配置された車体に発生した挙動を制御するための制御力を前記前輪及び後輪に発生させる制御手段とを備えた車両の駆動力制御装置において、前記制御手段が、前記走行用駆動力に対応して前記電動機に発生させるトルクを表す車両加減速制御指令値と、前記制御力に対応して前記電動機に発生させるトルクを表す車体挙動制御指令値とを演算し、前記電動機に関し、供給される電力に対する出力の比を表す効率を決定し、前記決定した効率を用いて前記車体挙動制御指令値によって表されるトルクを補正することにある。尚、この場合、前記制御手段が、前記走行用駆動力に対応して前記電動機に発生させるトルクを表す車両加減速制御指令値を演算する車両加減速制御指令値演算手段と、前記制御力に対応して前記電動機に発生させるトルクを表す車体挙動制御指令値を演算する車体挙動制御指令値演算手段と、前記電動機に関し、供給される電力に対する出力の比を表す効率を決定する効率決定手段と、前記効率決定手段によって決定された効率を用いて前記車体挙動制御指令値によって表されるトルクを補正するトルク補正手段とを備えることが可能である。
【0008】
この場合、前記効率は、例えば、電動機の回転数と出力するトルクの大きさとによって決定されるものであり、前記制御手段は、前記車体挙動制御指令値によって表されるトルクの大きさを用いて前記効率を決定することができる。尚、この場合、前記効率決定手段は、前記車体挙動制御指令値演算手段によって演算された前記車体挙動制御指令値によって表されるトルクの大きさを用いて前記効率を決定することができる。
【0009】
又、これらの場合、前記効率は、例えば、電動機の回転数と出力するトルクの大きさとによって決定されるものであり、前記制御手段は、前記電動機の回転数に対応する車両の車速を用いて前記効率を決定することができる。尚、この場合、前記制御手段は、少なくとも、車両の車速を検出する検出手段を備えており、前記効率決定手段は、前記検出手段によって検出されて前記電動機の回転数に対応する車両の車速を用いて前記効率を決定することができる。
【0010】
又、これらの場合、前記制御手段は、例えば、前記効率を前記各輪に独立して駆動力を伝達する前記電動機ごとに決定し、この決定した前記電動機ごとの前記効率のうち、最も低い値の効率を選択して前記車体挙動制御指令値によって表されるトルクを補正することができる。尚、この場合、前記効率決定手段は、前記各輪に独立して駆動力を伝達する前記電動機ごとに前記効率を決定するとともにこの決定した前記電動機ごとの前記効率のうち最も低い値の効率を選択し、前記トルク補正手段は、前記効率決定手段によって選択されて決定された前記最も低い値の効率を用いて前記車体挙動制御指令値によって表されるトルクを補正することができる。
【0011】
又、前記制御手段は、例えば、前記効率を前記各輪に独立して駆動力を伝達する前記電動機ごとに決定し、この決定した前記電動機ごとの前記効率を平均した効率を用いて前記車体挙動制御指令値によって表されるトルクを補正することもできる。尚、この場合、前記効率決定手段は、前記各輪に独立して駆動力を伝達する前記電動機ごとに前記効率を決定するとともにこの決定した前記電動機ごとの前記効率を平均した効率を選択し、前記トルク補正手段は、前記効率決定手段によって選択されて決定された前記平均した効率を用いて前記車体挙動制御指令値によって表されるトルクを補正することができる。
【0012】
更に、これらの場合、前記制御手段は、運転者による車両を走行させるための操作状態及び前記車体に発生した運動状態に基づいて前記車体の挙動を制御するための目標運動状態量を演算し、前記演算した目標運動状態量を実現するように前記前輪及び後輪に配分される前記制御力を演算することができる。尚、この場合、前記制御手段が、更に、運転者による車両を走行させるための操作状態を検出する操作状態検出手段と、車両走行時における前記車体に発生した運動状態を検出する運動状態検出手段と、少なくとも前記操作状態検出手段によって検出された前記操作状態及び前記運動状態検出手段によって検出された前記運動状態を入力する入力手段と、前記入力手段によって入力された前記操作状態及び前記運動状態に基づいて、前記車体の挙動を制御するための目標運動状態量を演算し、この演算された目標運動状態量を実現するように前記各輪に配分される前記制御力を演算する駆動力配分演算手段とを備えることができる。
【0013】
この場合、前記演算した目標運動状態量を実現するように前記前輪及び後輪に配分される前記制御力は、大きさが同一であり、かつ、逆向きとすることができる。
【0014】
これらによれば、車両を走行させる基本性能に関し、電動機は、車両加減速制御指令値によって表されるトルクを発生することにより、車両を走行させるための走行用駆動力を各輪に発生させることができる。これにより、車両加減速制御指令値によって表されるトルクは効率を勘案することなく決定されて(言い換えれば、効率が良好な領域にて)電動機が発生するため、車両は、例えば、運転者による意図を反映した走行用駆動力によって適切に走行して基本性能を適切に発揮することができる。
【0015】
一方、車体に発生した挙動を制御するための制御力に対応して、電動機に発生させるトルクを表す車体挙動制御指令値は、供給される電力に対する出力の比を表す電動機の効率を用いて補正される。この場合、電動機の効率は、電動機の回転数と出力するトルクの大きさとによって決定されるものであり、補正前の車体挙動制御指令値によって表されるトルクや電動機の回転数(或いは回転速度)に対応する車両の車速(或いは車輪速度)のうちの少なくとも一方を用いて容易に決定することができる。又、この場合、補正に用いられる効率としては、各輪に駆動力を独立的に伝達する電動機ごとに決定された効率のうちで最も低い値の効率や、電動機ごとに決定された効率を平均した効率を用いることができる。
【0016】
これにより、車体の挙動を制御することに関し、電動機は、電動機の効率によって補正された車体挙動制御指令値によって表される補正されたトルクを発生することにより、電動機の効率を勘案して車体の挙動を制御するための制御力を各輪に発生させることができる。すなわち、車体の挙動を制御する状況のように、一時的に電動機を効率の良好な領域外で制御しなければならない状況では、車体の挙動制御のみについて効率を一時的に低くして電動機による制御力(制御量)を低下させることができ、これにより、電動機の消費電力や発熱量が急激に増加することを効果的に防止することができる。又、車体に発生した挙動を制御するための制御力に対応して電動機に発生させるトルクを表す車体挙動制御指令値のみを効率を用いて補正するため、車両加減速制御指令値によって表されるトルクすなわち走行用駆動力で走行中の車両に与える影響を大幅に低減することができる。
【図面の簡単な説明】
【0017】
【図1】本発明の車両の駆動力制御装置を適用可能な車両の構成を概略的に示す概略図である。
【図2】本発明の実施形態に係り、図1の電子制御ユニットにて実行される駆動力制御のコンピュータプログラム処理を機能的に表す機能ブロック図である。
【図3】図1の電子制御ユニットにて実行される駆動力制御の流れを示すフローチャートである。
【図4】モータトルクと車速(インホイールモータの回転数(回転速度))とによって決定されるモータ効率を説明するためのグラフである。
【発明を実施するための形態】
【0018】
以下、本発明の実施形態を、図面を用いて詳細に説明する。図1は、本実施形態に係る車両の駆動力制御装置が搭載される車両Veの構成を概略的に示している。
【0019】
車両Veは、左右前輪11,12及び左右後輪13,14を備えている。そして左右前輪11,12は、互いに又はそれぞれ独立してサスペンション機構15,16を介して車両Veのバネ上としての車体Boに支持されている。又、左右後輪13,14は、互いに又はそれぞれ独立してサスペンション機構17,18を介して車両Veの車体Boに支持されている。
【0020】
ここで、サスペンション機構15〜18の構成については、本発明に直接関係しないため、その詳細な説明を省略するが、例えば、ショックアブソーバを内蔵したストラット、コイルスプリング及びサスペンションアーム等から構成されるストラット型サスペンションや、コイルスプリング、ショックアブソーバ及び上下のサスペンションアーム等から構成されるウィッシュボーン型サスペンション等の公知のサスペンションを採用することができる。
【0021】
左右前輪11,12のホイール内部には電動機19,20が、又、左右後輪13,14のホイール内部には電動機21,22がそれぞれ組み込まれていて、それぞれ左右前輪11,12及び左右後輪13,14に対して、例えば、複数のギアから構成される周知の減速機構G1〜G4を介して動力伝達可能に連結されている。すなわち、電動機19〜22は、所謂、インホイールモータ19〜22であり、左右前輪11,12及び左右後輪13,14とともに車両Veのバネ下に配置されている。そして、各インホイールモータ19〜22の回転をそれぞれ独立して制御することにより、左右前輪11,12及び左右後輪13,14に発生させる駆動力(駆動トルク)及び制動力(制動トルク)をそれぞれ独立して制御することができるようになっている。
【0022】
これらの各インホイールモータ19〜22は、例えば、交流同期モータにより構成されていて、インバータ23を介して、バッテリやキャパシタ等の蓄電装置24の直流電力が交流電力に変換され、その交流電力が各インホイールモータ19〜22に供給されることにより各インホイールモータ19〜22が駆動(すなわち力行)されて、左右前輪11,12及び左右後輪13,14に対してそれぞれ各減速機構G1〜G4を介して駆動トルクが付与する。又、各インホイールモータ19〜22は、左右前輪11,12及び左右後輪13,14の回転エネルギーを利用して回生制御することも可能である。すなわち、各インホイールモータ19〜22の回生・発電時には、各減速機構G1〜G4を介して左右前輪11,12及び左右後輪13,14の回転が各インホイールモータ19〜22に伝達され、伝達された回転に伴う回転(運動)エネルギーが各インホイールモータ19〜22によって電気エネルギーに変換され、その際に生じる電力がインバータ23を介して蓄電装置24に蓄電される。このとき、左右前輪11,12及び左右後輪13,14には、回生・発電力に基づく制動トルクが付与される。
【0023】
又、各輪11〜14と、これらに対応する各インホイールモータ19〜22との間には、それぞれ、ブレーキ機構25,26,27,28が設けられている。各ブレーキ機構25〜28は、例えば、ディスクブレーキやドラムブレーキ等の公知の制動装置である。そして、これらのブレーキ機構25〜28は、例えば、図示を省略するマスタシリンダから圧送される油圧により、各輪11〜14に制動力を生じさせるブレーキキャリパのピストンやブレーキシュー(ともに図示省略)等を作動させるブレーキアクチュエータ29に接続されている。
【0024】
上記インバータ23及びブレーキアクチュエータ29は、各インホイールモータ19〜22の回転状態(駆動状態)、及び、ブレーキ機構25〜28の動作状態等を制御する電子制御ユニット30にそれぞれ接続されている。従って、電子制御ユニット30は本発明の制御手段を構成する。
【0025】
電子制御ユニット30は、CPU、ROM、RAM等からなるマイクロコンピュータを主要構成部品とするものであり、後述するプログラムを含む各種プログラムを実行するものである。このため、電子制御ユニット30には、運転者による車両Veを走行させるための操作状態を検出する操作状態検出手段としての操作状態検出センサ31、走行している車両Veの車体Bo(バネ上)に発生した運動状態を検出する運動状態検出手段としての運動状態検出センサ32、走行している車両Veに作用する外乱を検出する外乱検出センサ33を含む各種センサからの各信号及びインバータ23からの信号が入力されるようになっている。
【0026】
ここで、操作状態検出センサ31は、運転者による各種操作に関連する操作量、例えば、図示を省略する操舵ハンドルに対する運転者の操作量(操舵角)を検出する操舵角センサや操作速度(操舵速度)を検出する操舵速度センサ、図示を省略するアクセルペダルに対する運転者による操作量(踏み込み量や、角度、圧力等)を検出するアクセルセンサ、図示を省略するブレーキペダルに対する運転者による操作量(踏み込み量や、角度、圧力等)を検出するブレーキセンサ等から構成される。又、運動状態検出センサ32は、走行している車両Veの運動状態量、例えば、車体Bo(バネ上)の上下方向における上下加速度を検出するバネ上上下加速度センサや、車体Boの左右方向における横加速度を検出する横加速度センサ、車体Bo(車両Ve)の車速(或いは車輪速度)を検出する車速センサ、或いは、車体Bo(車両Ve)に発生したヨーレートを検出するヨーレートセンサ、車体Bo(車両Ve)に発生したピッチレートを検出するピッチレートセンサ、車体Bo(車両Ve)に発生したロールレートを検出するロールレートセンサ等から構成される。更に、外乱検出センサ33は、例えば、各サスペンション機構15〜18のストローク量を検出するストロークセンサや、各輪11〜14を含む車両Veのバネ下の上下方向における上下加速度を検出するバネ下上下加速度センサ等から構成される。
【0027】
このように、電子制御ユニット30に対して上記各センサ31〜33及びインバータ23が接続されて各信号が入力されることにより、電子制御ユニット30は車両Veの走行状態及び車体Boの挙動を把握して制御することができる。以下、電子制御ユニット30による車両Veの走行状態及び車体Boの挙動状態の制御を詳細に説明する。
【0028】
本実施形態における電子制御ユニット30は、各インホイールモータ19〜22のそれぞれが発生する駆動力(又は制動力)の配分を適切に制御することにより、車両Veを加減速させて走行させるとともに車体Bo(バネ上)に発生した挙動、例えば、上下方向の振動挙動(ヒーブ挙動)や、ピッチ挙動、ロール挙動、ヨー挙動等を制御する。このため、電子制御ユニット30は、図2に示すように、入力手段としての入力部41、車両加減速制御値演算手段としての車両加減速制御指令値演算部42、車体挙動制御値演算手段及び駆動力配分演算手段としての車体挙動制御指令値演算部43、効率演算手段としての各輪モータ効率演算部44、トルク補正手段としての各輪最終モータトルク指令値演算部45及び出力手段としての出力部46を備えている。
【0029】
入力部41においては、操作状態検出センサ31、運動状態検出センサ32及び外乱検出センサ33のそれぞれから信号を入力する。そして、入力部41は、操作状態検出センサ31から入力した信号に基づいて、例えば、運転者による操舵ハンドルの操作量(操舵角、操舵速度)や、アクセルペダルの操作に伴うアクセル操作量、ブレーキペダルの操作に伴うブレーキ操作量等を取得する。又、入力部41は、運動状態検出センサ32から入力した信号に基づいて、例えば、車体Bo(車両Ve)の車速(或いは車輪速度)や、車体Boにおける上下方向の加速度、ロールレート、ピッチレート及びヨーレート等を取得する。更に、入力部41は、外乱検出センサ33から入力した信号に基づいて、例えば、車両Veが走行している路面の凹凸の大きさや車両Veに対する横風の影響の大きさ等を取得する。このように、各種検出値を入力して取得すると、入力部41は、取得した各種検出値を車両加減速制御指令値演算部42及び車体挙動制御指令値演算部43に出力するとともに、車両Veの車速(或いは車輪速度)を各輪モータ効率演算部44に供給する。以下、まず、車両加減速制御指令値演算部42による車両Veの走行状態の制御から説明する。
【0030】
車両加減速制御指令値演算部42は、入力部41から供給される各種検出値のうち、運転者によるアクセルペダルの操作に伴うアクセル操作量に応じた走行用駆動力、すなわち、運転者の意図に応じて車両Veを走行(加速)させるために各インホイールモータ19〜22が発生すべき駆動力として、左前輪11における左前駆動力Fdfl、右前輪12における右前駆動力Fdfr、左後輪13における左後駆動力Fdrl及び右後輪14における右後駆動力Fdrrを演算する。一方、車両加減速制御指令値演算部42は、入力部41から供給される各種検出値のうち、運転者によるブレーキペダルの操作に伴うブレーキ操作量に応じた走行用駆動力、すなわち、運転者の意図に応じて車両Veを走行(減速)させるために各インホイールモータ19〜22が発生すべき制動力として、左前輪11における左前制動力Fdfl、右前輪12における右前制動力Fdfr、左後輪13における左後制動力Fdrl及び右後輪14における右後制動力Fdrrを演算する。そして、車両加減速制御指令値演算部42は、例えば、各輪11〜14のタイヤ半径や減速機構G1〜G4のギア比を用いて、走行用駆動力であるFdfl,Fdfr,Fdrl,Fdrrに対応して各インホイールモータ19〜22が発生すべき車両加減速制御指令値としての制駆動用モータトルク指令値Tdfl,Tdfr,Tdrl,Tdrrを演算し、この演算した制駆動用モータトルク指令値Tdfl,Tdfr,Tdrl,Tdrrを出力部46に出力する。これにより、車両Veは、運転者が意図する加減速の合わせて走行することができる。
【0031】
次に、車体挙動制御指令値演算部43、各輪モータ効率演算部44及び各輪最終モータトルク指令値演算部45によって実現される車体Bo(バネ上)に発生した挙動の制御(挙動制御)について、図2及び図3を用いて詳細に説明する。尚、以下の説明においては、車体Bo(バネ上)に発生した挙動を制御するための駆動力(又は制動力)を制御力とも称呼する。
【0032】
車体挙動制御指令値演算部43は、入力部41から供給される前記各種検出値のうち、運動状態検出センサ32から入力した信号に基づいて、例えば、車体Bo(車両Ve)の車速(車輪速度)や、車体Boにおけるピッチレート、ロールレート及びヨーレート等を取得する。そして、車体挙動制御指令値演算部43は、公知の演算手法に従って、車体Boに発生した挙動を制御するための制御目標値として、例えば、目標ピッチモーメントMy、目標ロールモーメントMx及び目標ヨーモーメントMz等を演算する。このように、目標ピッチモーメントMy、目標ロールモーメントMx及び目標ヨーモーメントMz等を演算すると、車体挙動制御指令値演算部43は、目標ロールモーメントMx、目標ピッチモーメントMy及び目標ヨーモーメントMzを車両Veの重心位置にて発生させるために、各輪11〜14に制御力(駆動力又は制動力)を配分し、左前輪11における制御力Fcfl、右前輪12における制御力Fcfr、左後輪13における制御力Fcrl及び右後輪14における制御力Fcrrを演算する。尚、この駆動力の配分については、従来から知られているように、例えば、車両Veにおける各輪11〜14及びサスペンション機構15〜18の幾何学的な配置に基づいて決定されるものである。そして、車体挙動制御指令値演算部43は、例えば、各輪11〜14のタイヤ半径や減速機構G1〜G4のギア比を用いて、各制御力Fcfl,Fcfr,Fcrl,Fcrrに対応して各インホイールモータ19〜22が発生すべき車体挙動制御指令値としての制御用モータトルク指令値Tcfl,Tcfr,Tcrl,Tcrrを演算し、この演算した制御用モータトルク指令値Tcfl,Tcfr,Tcrl,Tcrrを各輪モータ効率演算部44及び各輪最終モータトルク指令値演算部45に出力する。
【0033】
各輪モータ効率演算部44においては、車体挙動制御指令値演算部43から出力された制御用モータトルク指令値Tcfl,Tcfr,Tcrl,Tcrrを取得するとともに、入力部41から車両Veの車速(或いは車輪速度)を取得する。そして、各輪モータ効率演算部44は、車速(すなわち、モータ回転数(回転速度))とモータトルクとによって決定されるモータ効率kを、前記取得した制御用モータトルク指令値Tcfl,Tcfr,Tcrl,Tcrr及び車速を用いて各輪11〜14(より詳しくは、インホイールモータ19〜22)について演算する。ここで、モータ効率kは、モータに供給した電力(電気エネルギー)に対してモータが出力する駆動力(機械エネルギー)の比を表すものであり、「0」〜「1」の値を有するものである。
【0034】
具体的に、モータ効率kの演算を説明すると、各輪モータ効率演算部44は、例えば、例示的に図4に示すように、実験的又は論理的に予め設定されるモータ効率マップを参照する。ここで、例示的に図4に示すモータ効率マップでは、車両Veの車速(言い換えれば、インホイールモータの回転数(回転速度))が大きくなるほどモータ効率kが大きく(すなわち効率が高く)なり、車両Veの車速が小さくなるほどモータ効率kが小さく(すなわち効率が低く)なる傾向を有する。又、例示的に図4に示すモータ効率マップでは、モータトルクが大きくなるほどモータ効率kが小さく(すなわち効率が低く)なり、モータトルクが小さくなるほどモータ効率kが大きく(すなわち効率が高く)なる傾向を有する。従って、図4に示すように、車速(インホイールモータの回転数(回転速度))が大きくモータトルクが小さくなるほどモータ効率kが大きく(すなわち効率が高く)なり、車速(インホイールモータの回転数(回転速度))が小さくモータトルクが大きくなるほどモータ効率kが小さく(すなわち効率が低く)なる傾向を有する。
【0035】
そして、各輪モータ効率演算部44は、例えば、左前輪11(インホイールモータ19)について、図4に示したモータ効率マップ上にて、前記取得した制御用モータトルク指令値Tcflと前記取得した車速とを用いてモータ効率kを決定する。同様に、各輪モータ効率演算部44は、右前輪12(インホイールモータ20)、左後輪13(インホイールモータ21)及び右後輪14(インホイールモータ22)について、モータ効率kを決定する。ここで、本実施形態においては、各輪モータ効率演算部44が、前記取得した制御用モータトルク指令値Tcfl,Tcfr,Tcrl,Tcrrと前記取得した車速(インホイールモータの回転数(回転速度))との両方を用いてモータ効率kを一義的に決定するように実施した。この場合、前記取得した制御用モータトルク指令値Tcfl,Tcfr,Tcrl,Tcrr及び前記取得した車速(インホイールモータの回転数(回転速度))のうちのいずれか一方を用いて、モータ効率マップ上にてモータ効率kを決定するように実施することも可能である。
【0036】
ところで、一般に、インホイールモータは、車両の設計に合わせて、車両を走行させる際に使用するモータトルク領域及びモータ回転数(回転速度)領域においてモータ効率が最もよくなるように設計される。従って、例えば、車両Veを走行させるために、上述したように、インホイールモータ19〜22が制駆動用モータトルク指令値Tdfl,Tdfr,Tdrl,Tdrrを発生する場合には、モータ効率kは高くなる。しかしながら、車体Boの挙動を制御するために各輪11〜14に設けられた各インホイールモータ19〜22が制御力Fcfl,Fcfr,Fcrl,Fcrrすなわち制駆動用モータトルク指令値Tcfl,Tcfr,Tcrl,Tcrrを発生する場合には、車体Boに生じた挙動変化に基づいて制駆動用モータトルク指令値Tcfl,Tcfr,Tcrl,Tcrrが決定されるものであるため、その大きさ及び作用方向は通常それぞれで異なる。従って、車体Boに生じる挙動変化によっては、各インホイールモータ19〜22を通常では使用しない領域で作動させる可能性があり、それぞれのインホイールモータ19〜22のモータ効率kが異なる。ここで、モータ効率kが低くなると、一般に、消費電力が増加したり、発熱量が増加する。
【0037】
このため、各輪モータ効率演算部44は、消費電力や発熱量の増加を抑制し、効率よくインホイールモータ19〜22を作動させるために、上述したように決定した(演算した)各輪11〜14(各インホイールモータ19〜22)の4つのモータ効率kのうちで、最も値の小さい(効率の低い)モータ効率kを選択する。そして、各輪モータ効率演算部44は、この選択したモータ効率kを各輪最終モータトルク指令値演算部45に出力する。
【0038】
各輪最終モータトルク指令値演算部45においては、車体挙動制御指令値演算部43から制御用モータトルク指令値Tcfl,Tcfr,Tcrl,Tcrrを取得するとともに、各輪モータ効率演算部44から前記選択された最小値となるモータ効率kを取得する。そして、各輪最終モータトルク指令値演算部45は、取得したそれぞれの制御用モータトルク指令値Tcfl,Tcfr,Tcrl,Tcrrに対して前記モータ効率kを乗算することにより、制御用最終モータトルク指令値kTcfl,kTcfr,kTcrl,kTcrrを演算する。これにより、各輪11〜14においては、制御力として、kFcfl,kFcfr,kFcrl,kFcrrが発生するようになる。
【0039】
ここで、このように、4つのインホイールモータ19〜22のモータ効率kのうちで最小値となるモータ効率kを制御用モータトルク指令値Tcfl,Tcfr,Tcrl,Tcrrに対して乗算すると、各インホイールモータ19〜22によって発生される制御力Fcfl,Fcfr,Fcrl,Fcrrが低下するため、車体Boの挙動変化に対する制御量が低減することになる。しかし、車体Boに生じる挙動変化に起因して各インホイールモータ19〜22を通常では使用しない領域で定常的に作動させることはなく、一時的なものであるため、一時的に制御量を低減させても、車体の挙動制御に与える影響は限定的となる。又、走行している車両Veの車体Boに生じる挙動変化は連続的に変化するものであるため、一時的に各インホイールモータ19〜22の制御量を低減させることに伴って、一時的に低下したモータ効率kが速やかに適切なモータ効率kに復帰する。これにより、モータ効率kが低い状態で作動させる頻度を少なくして、言い換えれば、モータ効率kが高い状態で作動させる頻度を多くして、各インホイールモータ19〜22を作動させることができ、その結果、消費電力の増加及び発熱量の増加を適切に抑制することができる。そして、各輪最終モータトルク指令値演算部45は、演算した制御用最終モータトルク指令値kTcfl,kTcfr,kTcrl,kTcrrを出力部46に出力する。
【0040】
出力部46においては、車両加減速制御指令値演算部42によって演算された制駆動用モータトルク指令値Tdfl,Tdfr,Tdrl,Tdrrと、各輪最終モータトルク指令値演算部45によって演算された制御用最終モータトルク指令値kTcfl,kTcfr,kTcrl,kTcrrとを合算する。そして、出力部46は、合算したモータトルク指令値(Tdfl+kTcfl),(Tdfr+kTcfr),(Tdrl+kTcrl),(Tdrr+kTcrr)に対応する駆動信号をインバータ23に出力する。そして、インバータ23は、各インホイールモータ19〜22に対して供給する駆動電力(駆動電流)を制御して各インホイールモータ19〜22を駆動させる。これにより、各輪11〜14においては、それぞれ、車両加減速制御指令値演算部42によって演算された各駆動力又は制動力であるFdfl,Fdfr,Fdrl,Fdrrが発生するとともに、各輪最終モータトルク指令値演算部45によって演算された制御用最終モータトルク指令値kTcfl,kTcfr,kTcrl,kTcrrに対応する制御力kFcfl,kFcfr,kFcrl,kFcrrが発生する。その結果、車両Veを運転者による操作状態(意図)に応じて適切に走行させることができるとともに、車体Boにおける挙動、例えば、上下方向の振動挙動(バウンシング挙動)や、ピッチ挙動、ロール挙動、ヨー挙動等を制御することができる。
【0041】
以上の説明からも理解できるように、上記実施形態によれば、車両Veを走行させることに関し、各インホイールモータ19〜22は、制駆動用モータトルク指令値Tdfl,Tdfr,Tdrl,Tdrrによって表されるモータトルクを発生することにより、車両を走行させるための走行用駆動力Fdfl,Fdfr,Fdrl,Fdrrを各輪11〜14に発生させることができる。これにより、制駆動用モータトルク指令値Tdfl,Tdfr,Tdrl,Tdrrはモータ効率kを勘案することなく決定されて各インホイールモータ19〜22が発生するため、車両Veは、例えば、運転者による意図を反映した走行用駆動力Fdfl,Fdfr,Fdrl,Fdrrによって適切に走行することができる。
【0042】
一方、車体Boに発生した挙動を制御するための制御力Fcfl,Fcfr,Fcrl,Fcrrに対応して各インホイールモータ19〜22に発生させるモータトルクを表す制御用モータトルク指令値Tcfl,Tcfr,Tcrl,Tcrrは、モータ効率kを用いて補正される。これにより、車体Boの挙動を制御することに関し、各インホイールモータ19〜22は、モータ効率kによって補正された制御用最終モータトルク指令値kTcfl,kTcfr,kTcrl,kTcrrによって表される補正されたモータトルクを発生することにより、インホイールモータ19〜22のモータ効率kを勘案して車体Boの挙動を制御するための制御力kFcfl,kFcfr,kFcrl,kFcrrを各輪11〜14に発生させることができる。すなわち、車体Boの挙動を制御する状況のように、一時的にインホイールモータ19〜22のうちのいずれかをモータ効率kの良好な領域外で制御しなければならない状況では、車体Boの挙動制御のみについてモータ効率kを一時的に低くして各インホイールモータ19〜22による制御力Fdfl,Fdfr,Fdrl,Fdrr(制御量)を低下させることができ、これにより、各インホイールモータ19〜22の消費電力や発熱量が急激に増加することを効果的に防止することができる。又、車体Boに発生した挙動を制御するための制御力Fdfl,Fdfr,Fdrl,Fdrrに対応して各インホイールモータ19〜22に発生させる制御用モータトルク指令値Tcfl,Tcfr,Tcrl,Tcrrのみをモータ効率kを用いて補正するため、制駆動用モータトルク指令値Tdfl,Tdfr,Tdrl,Tdrrすなわち走行用駆動力Fdfl,Fdfr,Fdrl,Fdrrで走行中の車両Veに与える影響を大幅に低減することができる。
【0043】
ここで、上記実施形態においては、図3に具体的に示したように、各輪モータ効率演算部44が、各輪11〜14(具体的には、各インホイールモータ19〜22)のモータ効率kのうち、最小値となるモータ効率kを選択するように実施した。ところで、例えば、左右前後輪11,12,13,14のうちの3輪におけるモータ効率kは高いにもかかわらず、1輪のみのモータ効率kが著しく小さい状況が生じる可能性がある。この場合、上述したように、最小値のモータ効率kを選択して全インホイールモータ19〜22の作動を制御すると、3輪のモータ効率kを大幅に低減させるために大きな無駄が発生してしまう可能性がある。
【0044】
従って、各輪モータ効率演算部44は、最小値のモータ効率kを選択することに代えて、又は、加えて、左右前後輪11,12,13,14のそれぞれのモータ効率kを平均化し、この平均化したモータ効率kを選択するように実施することも可能である。これによれば、上述したような1輪のみのモータ効率kが著しく小さい状況において、発生する無駄を可能な限り小さくすることができ、上記実施形態と同様の効果が期待できる。
【0045】
本発明の実施にあたっては、上記実施形態に限定されるものではなく、本発明の目的を逸脱しない限りにおいて種々の変更が可能である。
【0046】
例えば、上記実施形態においては、電子制御ユニット30(より詳しくは、車体挙動制御指令値演算部43)が制御力Fcfl,Fcfr,Fcrl,Fcrrすなわち制駆動用モータトルク指令値Tcfl,Tcfr,Tcrl,Tcrrをそれぞれ独立して制御するように実施した。この場合、車両Veの前後方向運動に影響を与えない、言い換えれば、車両Veに加減速度を生じさせないように、左右前輪11,12側で発生させる制御力Fcfl,Fcfrと左右後輪13,14側で発生させる制御力Fcrl,Fcrrとを互いに逆方向であり、かつ、その絶対値を同一として実施することも可能である。これにより、左右前輪11,12側で発生させる制御力Fcfl,Fcfrと左右後輪13,14側で発生させる制御力Fcrl,Fcrrとで駆動力差(又は制動力差)が互いに相殺し合うため、車両Veを走行させるために必要な駆動力(又は制動力)Fdfl,Fdfr,Fdrl,Fdrrが減少することを効果的に防止することができるとともに、上記実施形態と同様の効果を得ることができる。
【0047】
又、上記実施形態においては、電子制御ユニット30(より詳しくは、車体挙動制御指令値演算部43)が制御力Fcfl,Fcfr,Fcrl,Fcrrすなわち制駆動用モータトルク指令値Tcfl,Tcfr,Tcrl,Tcrrをそれぞれ独立して制御するように実施した。この場合、例えば、電子制御ユニット30(より詳しくは、車体挙動制御指令値演算部43)が、左右前輪11,12が協働して発生させる前輪側の制御力(駆動力又は制動力)と左右後輪13,14が協働して発生させる後輪側の制御力(駆動力又は制動力)をそれぞれ演算するように実施することも可能である。これによっても、上記実施形態と同様の効果を得ることができる。
【符号の説明】
【0048】
11,12…前輪、13,14…後輪、15,16,17,18…サスペンション機構、19,20,21,22…電動機(インホイールモータ)、23…インバータ、24…蓄電装置、25,26,27,28…ブレーキ機構、29…ブレーキアクチュエータ、30…電子制御ユニット、31…操作状態検出センサ、32…運動状態検出センサ、33…外乱検出センサ、41…入力部、42…車両加減速制御指令値演算部、43…車体挙動制御指令値演算部、44…各輪モータ効率演算部、45…各輪最終モータトルク指令値演算部、46…出力部、G1,G2,G3,G4…減速機構、Ve…車両、Bo…車体
【特許請求の範囲】
【請求項1】
車両のバネ下に配置された各輪に連結されて独立して駆動力を伝達する電動機と、前記電動機から前記各輪にそれぞれ独立して伝達される駆動力を制御して車両を走行させるための走行用駆動力及び車両のバネ上に配置された車体に発生した挙動を制御するための制御力を前記前輪及び後輪に発生させる制御手段とを備えた車両の駆動力制御装置において、
前記制御手段が、
前記走行用駆動力に対応して前記電動機に発生させるトルクを表す車両加減速制御指令値と、前記制御力に対応して前記電動機に発生させるトルクを表す車体挙動制御指令値とを演算し、
前記電動機に関し、供給される電力に対する出力の比を表す効率を決定し、
前記決定した効率を用いて前記車体挙動制御指令値によって表されるトルクを補正することを特徴とする車両の駆動力制御装置。
【請求項2】
請求項1に記載した車両の駆動力制御装置において、
前記効率は、
電動機の回転数と出力するトルクの大きさとによって決定されるものであり、
前記制御手段は、
前記車体挙動制御指令値によって表されるトルクの大きさを用いて前記効率を決定することを特徴とする車両の駆動力制御装置。
【請求項3】
請求項1又は請求項2に記載した車両の駆動力制御装置において、
前記効率は、
電動機の回転数と出力するトルクの大きさとによって決定されるものであり、
前記制御手段は、
前記電動機の回転数に対応する車両の車速を用いて前記効率を決定することを特徴とする車両の駆動力制御装置。
【請求項4】
請求項1ないし請求項3のうちのいずれか一つに記載した車両の駆動力制御装置において、
前記制御手段は、
前記効率を前記各輪に独立して駆動力を伝達する前記電動機ごとに決定し、
この決定した前記電動機ごとの前記効率のうち、最も低い値の効率を選択して前記車体挙動制御指令値によって表されるトルクを補正することを特徴とする車両の駆動力制御装置。
【請求項5】
請求項1ないし請求項3のうちのいずれか一つに記載した車両の駆動力制御装置において、
前記制御手段は、
前記効率を前記各輪に独立して駆動力を伝達する前記電動機ごとに決定し、
この決定した前記電動機ごとの前記効率を平均した効率を用いて前記車体挙動制御指令値によって表されるトルクを補正することを特徴とする車両の駆動力制御装置。
【請求項6】
請求項1ないし請求項5のうちのいずれか一つに記載した車両の駆動力制御装置において、
前記制御手段は、
運転者による車両を走行させるための操作状態及び前記車体に発生した運動状態に基づいて前記車体の挙動を制御するための目標運動状態量を演算し、
前記演算した目標運動状態量を実現するように前記前輪及び後輪に配分される前記制御力を演算することを特徴とする車両の駆動力制御装置。
【請求項7】
請求項6に記載した車両の駆動力制御装置において、
前記演算した目標運動状態量を実現するように前記前輪及び後輪に配分される前記制御力は、大きさが同一であり、かつ、逆向きであることを特徴とする車両の駆動力制御装置。
【請求項1】
車両のバネ下に配置された各輪に連結されて独立して駆動力を伝達する電動機と、前記電動機から前記各輪にそれぞれ独立して伝達される駆動力を制御して車両を走行させるための走行用駆動力及び車両のバネ上に配置された車体に発生した挙動を制御するための制御力を前記前輪及び後輪に発生させる制御手段とを備えた車両の駆動力制御装置において、
前記制御手段が、
前記走行用駆動力に対応して前記電動機に発生させるトルクを表す車両加減速制御指令値と、前記制御力に対応して前記電動機に発生させるトルクを表す車体挙動制御指令値とを演算し、
前記電動機に関し、供給される電力に対する出力の比を表す効率を決定し、
前記決定した効率を用いて前記車体挙動制御指令値によって表されるトルクを補正することを特徴とする車両の駆動力制御装置。
【請求項2】
請求項1に記載した車両の駆動力制御装置において、
前記効率は、
電動機の回転数と出力するトルクの大きさとによって決定されるものであり、
前記制御手段は、
前記車体挙動制御指令値によって表されるトルクの大きさを用いて前記効率を決定することを特徴とする車両の駆動力制御装置。
【請求項3】
請求項1又は請求項2に記載した車両の駆動力制御装置において、
前記効率は、
電動機の回転数と出力するトルクの大きさとによって決定されるものであり、
前記制御手段は、
前記電動機の回転数に対応する車両の車速を用いて前記効率を決定することを特徴とする車両の駆動力制御装置。
【請求項4】
請求項1ないし請求項3のうちのいずれか一つに記載した車両の駆動力制御装置において、
前記制御手段は、
前記効率を前記各輪に独立して駆動力を伝達する前記電動機ごとに決定し、
この決定した前記電動機ごとの前記効率のうち、最も低い値の効率を選択して前記車体挙動制御指令値によって表されるトルクを補正することを特徴とする車両の駆動力制御装置。
【請求項5】
請求項1ないし請求項3のうちのいずれか一つに記載した車両の駆動力制御装置において、
前記制御手段は、
前記効率を前記各輪に独立して駆動力を伝達する前記電動機ごとに決定し、
この決定した前記電動機ごとの前記効率を平均した効率を用いて前記車体挙動制御指令値によって表されるトルクを補正することを特徴とする車両の駆動力制御装置。
【請求項6】
請求項1ないし請求項5のうちのいずれか一つに記載した車両の駆動力制御装置において、
前記制御手段は、
運転者による車両を走行させるための操作状態及び前記車体に発生した運動状態に基づいて前記車体の挙動を制御するための目標運動状態量を演算し、
前記演算した目標運動状態量を実現するように前記前輪及び後輪に配分される前記制御力を演算することを特徴とする車両の駆動力制御装置。
【請求項7】
請求項6に記載した車両の駆動力制御装置において、
前記演算した目標運動状態量を実現するように前記前輪及び後輪に配分される前記制御力は、大きさが同一であり、かつ、逆向きであることを特徴とする車両の駆動力制御装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2013−85376(P2013−85376A)
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願番号】特願2011−223583(P2011−223583)
【出願日】平成23年10月11日(2011.10.11)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【出願人】(000003609)株式会社豊田中央研究所 (4,200)
【Fターム(参考)】
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願日】平成23年10月11日(2011.10.11)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【出願人】(000003609)株式会社豊田中央研究所 (4,200)
【Fターム(参考)】
[ Back to top ]