
車両の駆動状態制御装置
【課題】オンデマンド式駆動状態制御装置にて、クラッチ機構の経年変化等に起因する「2輪駆動状態から4輪駆動状態への移行時のドライバビリティの悪化」を抑制すること。
【解決手段】2輪駆動走行(H2)モード選択時、前輪側ディファレンシャルと左右前輪の一方との間の車軸に介挿された切換機構が非接続状態とされ、クラッチ機構により調整される前輪側への分配トルクがゼロに維持される。4輪駆動走行(H4Auto)モード選択時、切換機構が接続状態とされ、分配トルクが走行状態に応じて調整される。車両の走行中且つH2モード選択時、前輪側プロペラシャフトの回転停止を条件に、クラッチ機構に印加される電流がゼロから徐々に増大され(t1)、前輪側プロペラシャフトの回転が開始する時点(t2)での電流の値が取得される。H4Autoモード選択時にて分配トルクの目標値がゼロのとき、前記取得された値の電流がクラッチ機構に印加される(t4以降)。
【解決手段】2輪駆動走行(H2)モード選択時、前輪側ディファレンシャルと左右前輪の一方との間の車軸に介挿された切換機構が非接続状態とされ、クラッチ機構により調整される前輪側への分配トルクがゼロに維持される。4輪駆動走行(H4Auto)モード選択時、切換機構が接続状態とされ、分配トルクが走行状態に応じて調整される。車両の走行中且つH2モード選択時、前輪側プロペラシャフトの回転停止を条件に、クラッチ機構に印加される電流がゼロから徐々に増大され(t1)、前輪側プロペラシャフトの回転が開始する時点(t2)での電流の値が取得される。H4Autoモード選択時にて分配トルクの目標値がゼロのとき、前記取得された値の電流がクラッチ機構に印加される(t4以降)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の駆動状態制御装置に関する。
【背景技術】
【0002】
従来より、入力軸と、第1出力軸と、第2出力軸とを備えたトランスファが広く知られている(例えば、特許文献1を参照)。入力軸は、車両のエンジンに接続された変速機の出力軸と接続される。第1出力軸は、後輪側プロペラシャフト(第1プロペラシャフト)を介して左右後輪(第1左右輪)と接続され、第2出力軸は、前輪側プロペラシャフト(第2プロペラシャフト)を介して左右前輪(第2左右輪)と接続される。
【0003】
このトランスファは、入力軸の駆動トルクの一部であって第2出力軸に分配されるトルク(分配トルク)を調整可能なクラッチ機構を備える。第2出力軸にはクラッチ機構により調整された分配トルクが伝達され、第1出力軸には入力軸の駆動トルクから分配トルクを減じて得られるトルクが伝達される。従って、分配トルクがゼロのとき、2輪駆動状態(後輪駆動状態)が得られる。一方、分配トルクがゼロより大きいとき、4輪駆動状態が得られるとともに、分配トルクの調整によって前後輪のトルク配分が調整され得る。
【0004】
上述のトランスファが搭載された車両であって、左右前輪の一方(特定車輪)の車軸に介装された切換機構を備えるものも広く知られている。この切換機構は、特定車輪と前輪側ディファレンシャルとの間で動力伝達系統が形成される「接続状態」と、特定車輪と前輪側ディファレンシャルとの間で動力伝達系統が形成されない「非接続状態」と、を選択的に実現可能に構成される。
【0005】
この切換機構が搭載された車両では、通常、2輪駆動走行モードと4輪駆動走行モードとを含む複数の走行モードのうちから1つの走行モードを選択する選択スイッチが備えられる。4輪駆動走行モードが選択された場合、切換機構が「接続状態」に維持されるとともに分配トルクが左右後輪のスリップ状態等の車両の走行状態に基づいて調整される。これにより、通常、分配トルクがゼロに維持されて、2輪駆動状態が得られる。一方、左右後輪のスリップが発生した場合等の所定条件下においてのみ、分配トルクがゼロより大きい値に調整されて、駆動状態が2輪駆動状態から4輪駆動状態に自動的に切り換えられる。このような駆動制御は、「オンデマンド式」とも呼ばれる。
【0006】
2輪駆動走行モードが選択された場合、切換機構が「非接続状態」に維持されるとともに分配トルクがゼロに維持される。この結果、2輪駆動状態が得られるとともに、車両走行中において、前輪側プロペラシャフトの空回りの発生が防止(抑制)され得る。従って、慣性モーメントが比較的大きい前輪側プロペラシャフトを空回りさせるための駆動エネルギーが不要となる。この結果、切換機構が搭載されない車両(即ち、2輪駆動状態にて前輪側プロペラシャフトの空回りが発生する車両)に比して、車両の燃費を良くすることができる。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特許第3650255号公報
【発明の概要】
【0008】
上述したクラッチ機構は、通常、多板クラッチ式電子制御カップリング等で構成される。係るクラッチ機構では、供給される電流が大きくなるにつれて、分配トルクがより大きい値に調整される。係るクラッチ機構を制御するにあたり、「クラッチ機構に供給される電流」と「クラッチ機構により調整される分配トルク」との間の関係を規定するマップが予め作製される。4輪駆動走行モードが選択された状態では、車両の走行状態から分配トルクの目標値が決定され、その分配トルクの目標値が前記マップに代入されることによって電流の値が決定される。このように決定された電流がクラッチ機構に供給されることによって、分配トルクが前記車両の走行状態に基づいて調整される。
【0009】
ところで、上述したクラッチ機構(多板クラッチ式電子制御カップリング)においては、クラッチ機構の個体差、経年変化等に起因して、電流に対する分配トルクの実際値の特性が前記予め作製されたマップに基づく特性からずれ得る。より具体的には、例えば、多板クラッチ内において隣接するクラッチ板の間の隙間が大きくなった場合、或る大きさの分配トルクを発生するために必要な電流の大きさが大きくなる。この結果、分配トルクの実際値がゼロから増大開始するタイミングが遅れる。このことは、オンデマンド式において、駆動状態が2輪駆動状態から4輪駆動状態に移行するタイミングが遅れて、ドライバビリティが悪化することを意味する。
【0010】
本発明は、上記問題に対処するためのものであり、その目的は、オンデマンド式の車両の駆動状態制御装置において、クラッチ機構の個体差、経年変化等に起因する、2輪駆動状態から4輪駆動状態への移行時のドライバビリティの悪化を抑制し得るものを提供することにある。
【0011】
本発明に係る車両の駆動状態制御装置は、上述と同じトランスファ、切換機構、及び、制御手段を備えるオンデマンド式の装置である。本発明による車両の駆動状態制御装置の特徴は、前記制御手段が、前記車両の走行中且つ前記2輪駆動走行モードが選択された状態において、前記第2プロペラシャフトの回転が停止していると判定されたことを条件に、クラッチ機構に供給される電流を徐々に増大していき、第2プロペラシャフトの回転が開始する時点での電流の値を分配トルク伝達開始時電流値(Iz)として取得することにある。ここにおいて、前記クラッチ機構に供給される電流が大きいほど分配トルクが大きくなるように前記クラッチ機構が構成されている。
【0012】
加えて、本発明による車両の駆動状態制御装置の特徴は、前記制御手段が、前記4輪駆動走行モードが選択された状態において、前記分配トルクの目標値がゼロのとき、前記取得された分配トルク伝達開始時電流値の電流を前記クラッチ機構に供給するように構成されたことにある。ここにおいて、前記取得された分配トルク伝達開始時電流値を用いて、前記分配トルクがゼロから増大するときの前記電流の値が前記分配トルク伝達開始時電流値となるように、前記関係が更新されるように構成され、前記4輪駆動走行モードが選択された状態において、前記分配トルクの目標値と前記更新された関係とに基づいて決定される前記電流を前記クラッチ機構に供給することによって、前記分配トルクが前記車両の走行状態に基づいて調整するように構成されることがより好ましい。
【0013】
これによれば、4輪駆動走行モードにおいて、分配トルクの目標値がゼロのときに分配トルク伝達開始時電流値の電流がクラッチ機構に供給される。従って、分配トルクの目標値のゼロからの増大に伴って電流が分配トルク伝達開始時電流値から僅かに増大することによって、分配トルクの実際値がゼロから直ちに増大し得る。従って、上述のように、多板クラッチ内において隣接するクラッチ板の間の隙間が大きくなった場合等においても、分配トルクがゼロから増大開始するタイミングが遅れる事態が発生し難い。即ち、クラッチ機構の個体差、経年変化等に起因する、2輪駆動状態から4輪駆動状態への移行時のドライバビリティの悪化が抑制され得る。
【図面の簡単な説明】
【0014】
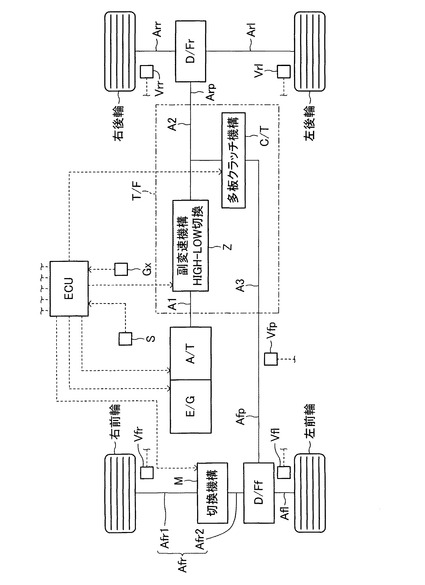
【図1】本発明の実施形態に係る車両の駆動状態制御装置を搭載した車両の動力伝達系統を模式的に示した図である。
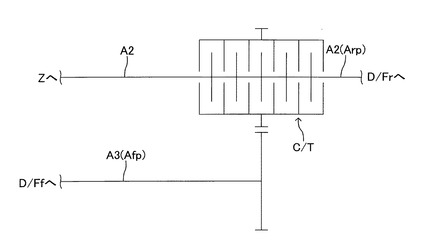
【図2】図1に示す多板クラッチ機構の具体的な構成の一例を示す模式図である。
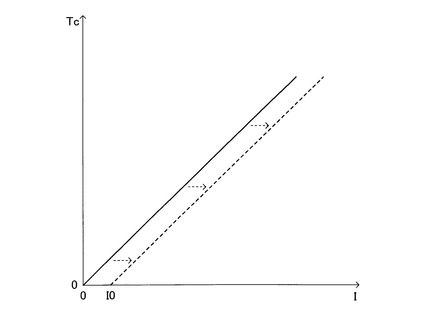
【図3】図1に示す多板クラッチ機構についてのクラッチ駆動電流と分配トルクとの関係を示すグラフである。
【図4】図1に示したECUにより実行される、マップの学習を行うためのルーチンを示したフローチャートである。
【図5】図1に示したECUにより実行される、4輪駆動走行モード(H4Auto)での分配トルクの制御を行うためのルーチンを示したフローチャートである。
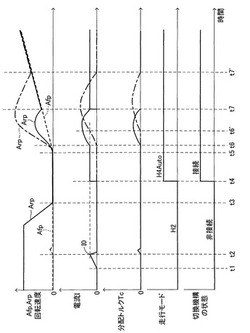
【図6】図4及び図5に示したルーチンに基づいて、マップの学習、並びに4輪駆動走行モードでの分配トルクの制御が行われる場合の一例を示したタイムチャートである。
【発明を実施するための形態】
【0015】
以下、本発明の実施形態に係る車両の駆動状態制御装置(以下、「本装置」とも呼ぶ。)について図面を参照しつつ説明する。図1は、本装置を搭載した車両の駆動システムの動力伝達系統を示す。この駆動システムは、トランスファT/Fと、後輪側ディファレンシャルD/Frと、前輪側ディファレンシャルD/Ffと、切換機構Mと、車輪速度センサVfr,Vfl,Vrr,Vrlと、前輪側プロペラシャフト回転速度センサVfpと、前後加速度センサGxと、2駆・4駆切換スイッチSと、電子制御装置ECUと、を備える。
【0016】
トランスファT/Fは、入力軸A1と、第1出力軸A2と、第2出力軸A3とを備える。入力軸A1は、エンジンE/Gと接続された自動変速機A/Tの出力軸と接続され、入力軸A1とエンジンE/Gとの間で動力伝達系統が形成されている。第1出力軸A2は、後輪側プロペラシャフトArpを介して後輪側ディファレンシャルD/Frと接続され、第1出力軸A2と後輪側ディファレンシャルD/Frとの間で動力伝達系統が形成されている。第2出力軸A3は、前輪側プロペラシャフトAfpを介して前輪側ディファレンシャルD/Ffと接続され、第2出力軸A3と前輪側ディファレンシャルD/Ffとの間で動力伝達系統が形成されている。
【0017】
また、トランスファT/Fは、副変速機構Zと、多板クラッチ機構C/Tとを備える。副変速機構Zは、周知の構成の1つを有していて、入力軸A1の回転速度に対する第1出力軸A2の回転速度の割合が「1」となるHIGHモードと、同割合が「1」未満の一定値となるLOWモードと、を選択的に切り換え可能に構成されている。
【0018】
図2に示すように、多板クラッチ機構C/Tは、周知の構成を有する多板クラッチ式電子制御カップリングで構成されている。C/Tは、「入力軸A1の駆動トルク」の一部であって第2出力軸A3に分配されるトルク(以下、「分配トルクTc」と呼ぶ)を調整可能となっている。第2出力軸A3にはC/Tによって調整された分配トルクTcが伝達され、第1出力軸A2には「入力軸A1の駆動トルク」から分配トルクTcを減じて得られるトルクが伝達される。
【0019】
従って、分配トルクTcがゼロのとき、2輪駆動状態(後輪駆動状態)が得られる。一方、Tcがゼロより大きいとき、4輪駆動状態が得られるとともに、Tcの調整によって前後輪のトルク配分が調整され得る。
【0020】
分配トルクTcは、多板クラッチ機構C/T内の図示しないアクチュエータを駆動するための電流(以下、「クラッチ駆動電流I」と呼ぶ)を調整することにより調整可能となっている。具体的には、図3に示すように、Tcは、Iが「0」から増大するにつれて「0」から増大するように調整される。
【0021】
後輪側ディファレンシャルD/Frは、周知の構成の1つを有していて、後輪側プロペラシャフトArpのトルクを右後輪の車軸Arr及び左後輪の車軸Arlを介して左右後輪に分配するようになっている。同様に、前輪側ディファレンシャルD/Ffは、周知の構成の1つを有していて、前輪側プロペラシャフトAfpのトルクを右前輪の車軸Afr及び左前輪の車軸Aflを介して左右前輪に分配するようになっている。
【0022】
切換機構Mは、右前輪の車軸Afrに介装されていて、右前輪と前輪側ディファレンシャルD/Ffとの間で動力伝達系統が形成される「接続状態」と、右前輪と前輪側ディファレンシャルD/Ffとの間で動力伝達系統が形成されない「非接続状態」とを選択的に実現可能に構成されている。以下、右前輪の車軸Afrにおいて、切換機構Mと右前輪との間の部分を特に「第1軸Afr1」と呼び、切換機構Mと前輪側ディファレンシャルD/Ffとの間の部分を特に「第2軸Afr2」と呼ぶ。なお、この切換機構Mは、第1、第2軸Afr1,Afr2の回転速度を近づけるための回転同期装置(シンクロナイザ)が備えられていてもいなくてもよい。また、切換機構Mは、左前輪の車軸Aflに介装されていてもよい。
【0023】
切換機構Mは、例えば、ドッグ式(スプライン嵌合式)の構成を有している。この場合、切換機構Mは、例えば、第1、第2軸Afr1,Afr2の一方と一体のハブ(外スプライン又は内スプライン)と、前記ハブとスプライン嵌合するスリーブ(内スプライン又は外スプライン)と、第1、第2軸Afr1,Afr2の他方と一体のピース(外スプライン又は内スプライン)と、前記スリーブの位置を調整するフォークと、を備える。そして、スリーブが第1位置にある場合にピースとスリーブとがスプライン嵌合することで「接続状態」が得られ、スリーブが第2位置にある場合にピースとスリーブとがスプライン嵌合しないことで「非接続状態」が得られる。
【0024】
車輪速度センサVfr,Vfl,Vrr,Vrlは、対応する車輪の車輪速度をそれぞれ検出するようになっている。前輪側プロペラシャフト回転速度センサVfpは、前輪側プロペラシャフトAfpの回転速度を検出するようになっている。前後加速度センサGxは、車両の前後方向の加速度(前後加速度)を検出するようになっている。2駆・4駆切換スイッチSは、車両の乗員の操作により、「2輪駆動走行(H2)モード」と、「4輪駆動走行(H4Lock)モード」と、「オンデマンド4輪駆動走行(H4Auto)」との何れか1つを選択可能に構成されている。
【0025】
電子制御装置ECUは、周知の構成の1つを有するマイクロコンピュータである。電子制御装置ECUは、車両の状態に応じて、エンジンE/G、及び自動変速機A/Tの状態を制御するようになっている。また、電子制御装置ECUは、運転者により操作される操作部材(図示せず)の状態(位置)に基づいて、副変速機構Zの状態(HIGHモードかLOWモードか)を制御するためのアクチュエータ(図示せず)を制御するようになっている。
【0026】
加えて、電子制御装置ECUは、2駆・4駆切換スイッチSの状態、及び、車両の走行状態(各車輪の回転速度、車両の前後加速度等)に応じて、多板クラッチ機構C/Tの分配トルクTcを制御するためのアクチュエータ(図示せず)を制御し、並びに、スイッチSの状態に応じて、切換機構Mの状態(「接続状態」か「非接続状態」か)を制御するためのアクチュエータ(図示せず)を制御するようになっている。
【0027】
具体的には、スイッチSが「H2モード」に設定されている場合、切換機構Mが「非接続状態」に維持され、且つ、分配トルクTcがゼロに維持される。この結果、2輪(後輪)駆動状態が常に得られるとともに、車両走行中において、前輪側ディファレンシャルD/Ffの作用により前輪側プロペラシャフトAfpの回転が(ほぼ)停止して、Afpの空回りの発生が防止(抑制)され得る。従って、慣性モーメントが比較的大きいAfpを空回りさせるための駆動エネルギーが不要となる。この結果、切換機構Mが搭載されない車両(即ち、2輪駆動状態にて前輪側プロペラシャフトの空回りが発生する車両)に比して、車両の燃費を良くすることができる。
【0028】
スイッチSが「H4Lockモード」に設定されている場合、切換機構Mが「接続状態」に維持され、且つ、分配トルクTcが最大に維持される。この結果、4輪駆動状態が常に得られる。
【0029】
スイッチSが「H4Autoモード」に設定されている場合、切換機構Mが「接続状態」に維持され、且つ、分配トルクTcが車両の走行状態に基づいて調整される。具体的には、通常、Tcがゼロに維持されて、2輪駆動状態が得られる。一方、左右後輪のスリップが実際に発生したと判定された場合や、左右後輪のスリップが発生する可能性が高いと判定された場合等、所定条件下においてのみ、車両の走行状態に基づいてTcがゼロより大きい値に調整されて、駆動状態が2輪駆動状態から4輪駆動状態に自動的に切り換えられる。このように、「H4Autoモード」が設定されている場合、「オンデマンド式」の駆動状態制御装置が得られる。「H4Autoモード」に設定されている場合におけるTcの制御については更に後述する。
【0030】
(マップの学習)
上述の図3に示すように、多板クラッチ機構C/Tでは、供給される電流Iが大きくなるにつれて、分配トルクTcがより大きい値に調整される。本装置では、C/Tを制御するため、クラッチ駆動電流Iと分配トルクTcとの間の関係を規定するマップ(図3の実線を参照)が予め作製される。このマップは、C/Tの標準品(マスタ品)を使用した実験等を通して作製され得る。
【0031】
本装置では、「H4Autoモード」が設定されている場合、車両の走行状態から分配トルクTcの目標値が決定され、その目標値が前記マップに代入されることによって電流Iの値が決定される。このように決定された電流Iがクラッチ機構に供給されることによって、分配トルクTcが車両の走行状態に基づいて調整される。
【0032】
ところで、クラッチ機構C/Tでは、クラッチ機構の個体差、経年変化等に起因して、電流Iに対する分配トルクTcの実際値の特性が前記マップに基づく予め定められた特性(図3の実線を参照)からずれ得る。より具体的には、例えば、C/T内において隣接するクラッチ板の間の隙間が初期値より大きくなった場合、或る大きさの分配トルクを発生するために必要な電流Iの大きさが大きくなる。
【0033】
例えば、図3の破線に示す特性は、図3の実線で示す予め定められた特性から図3において右側に値「I0」だけずれている。換言すれば、或る大きさの分配トルクを発生するために必要な電流Iの大きさが値「I0」だけ大きくなっている。この結果、図3の破線に示す特性を有するクラッチ機構が使用される場合、分配トルクTcの実際値がゼロから増大開始するタイミングが値「I0」に相当する分だけ遅れる。このことは、「H4Autoモード」において、駆動状態が2輪駆動状態から4輪駆動状態に移行するタイミングが遅れて、ドライバビリティが悪化することを意味する。
【0034】
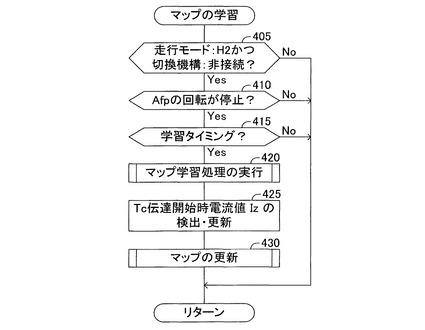
係るドライバビリティの悪化を抑制するためには、上述した「電流Iに対する分配トルクTcの実際値の特性のずれ」を補償する必要がある。本装置では、この補償を達成するため、前記マップの学習(更新)が行われる。係るマップの更新は、「H2モード」における車両走行中において前輪側プロペラシャフトAfpの回転が停止する現象を利用して行われる。以下、図4を参照しながら、マップの学習(更新)に関する処理の流れについて説明する。
【0035】
図4から理解できるように、マップの学習処理(ステップ420)は、「H2モード」が選択され且つ切換機構Mが「非接続状態」にあること、前輪側プロペラシャフトAfpの回転が停止していること、並びに、学習タイミングが到来していること、を条件に実行される(ステップ405、410、415で「Yes」と判定)。Afpの回転の停止は、センサVfpから検出されるAfpの回転速度が所定の微小値(ゼロを含む)以下である等に基づいて判定され得る。
【0036】
「学習タイミング」は、「車両が走行中(車速がゼロよりも大きい)であること」、並びに、「マップの学習(更新)が未実施であること、又は、前回のマップの学習(更新)時点からの車両の走行距離が所定距離以上であること」、を条件に到来する。
【0037】
マップの学習処理(ステップ420)では、多板クラッチ機構C/Tに供給される電流Iがゼロから徐々に増大される。この過程において、前輪側プロペラシャフトAfpの回転が開始する時点が検出され、この時点での電流Iの値が「分配トルク伝達開始時電流値Iz」として取得される(ステップ425)。このIzは、電流Iのゼロからの増大過程において、分配トルクTcの実際値がゼロから増大する時点に対応する電流値ということもできる。図3の破線で示した例では、Izが値I0となる。
【0038】
マップの学習処理が完了すると、マップの更新が行われる(ステップ430)。具体的には、取得された分配トルク伝達開始時電流値Izを用いて、分配トルクの実際値がゼロから増大するときの電流Iの値がIzとなるように、マップが更新される。図3に示す例では、マップの特性が、「実線で示す特性」から「破線で示す特性」に更新される(図3において、特性線が値I0だけ右に平行移動される)。
【0039】
(H4Autoモードでの分配トルクの制御)
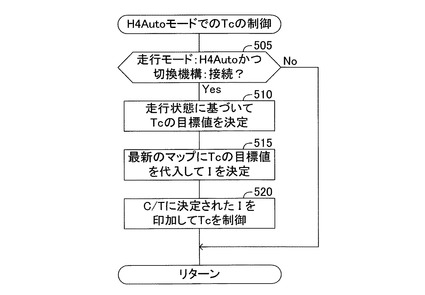
本装置では、「H4Autoモード」が設定されている場合、上述した更新したマップを利用して分配トルクTcが調整される。以下、図5を参照しながら、H4AutoモードでのTcの制御に関する処理の流れについて説明する。
【0040】
図5から理解できるように、H4AutoモードでのTcの制御は、「H4Autoモード」が選択され且つ切換機構Mが「接続状態」にあること、を条件に実行される(ステップ505で「Yes」と判定)。この条件が成立している状態において、先ず、車両の走行状態に基づいて分配トルクTcの目標値が決定される(ステップ510)。
【0041】
具体的には、例えば、左右後輪のスリップが実際に発生したと判定されておらず、且つ、左右後輪のスリップが発生する可能性が高いとも判定されていない場合、Tcの目標値がゼロに維持される。一方、左右後輪のスリップが実際に発生したと判定され、或いは、左右後輪のスリップが発生する可能性が高いと判定されている場合、車両の走行状態に応じてTcの目標値がゼロより大きい値に決定される。左右後輪のスリップが実際に発生したか否かの判定は、例えば、各車輪の回転速度、車両の前後加速度等の情報に基づいて達成され得る。左右後輪のスリップが発生する可能性が高いか否かの判定は、例えば、アクセルペダル(図示せず)の踏み込み量の急激な増大等が発生したか否かに基づいて達成され得る。
【0042】
分配トルクTcの目標値が決定されると、先のステップ430の処理によって更新された最新のマップにその目標値を代入して、電流Iが決定される(ステップ515)。Tcの目標値がゼロの場合、電流Iが上記Izに設定される。最新のマップとは、マップの更新が複数回実行されている場合には、最後の更新の後のマップを指す。なお、マップの更新が未だなされていない場合には、最新のマップとして、当初の(オリジナルの)マップが使用される。
【0043】
電流Iが決定されると、多板クラッチ機構C/Tに電流Iが供給される(ステップ520)。これにより、分配トルクTcが車両の走行状態に基づいて調整される。このように、H4Autoモードでは、更新した最新のマップを利用してTcが調整される。従って、当初の(オリジナルの)マップが利用され続ける場合と比較して、Tcの実際値が目標値と一致し易くなり、ドライバビリティが向上し得る。
【0044】
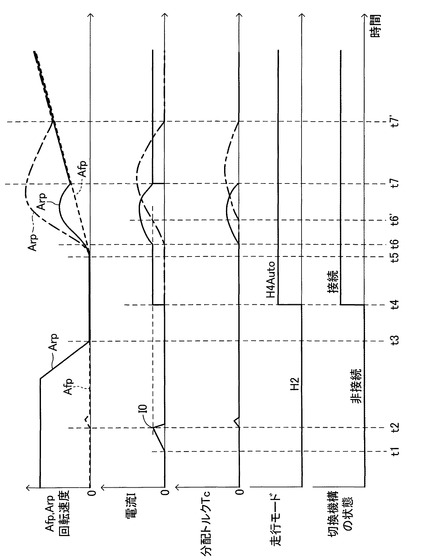
(作動例)
図6は、図1に示した車両が走行する場合の一例を示す。この例では、前記当初のマップとして、図3の実線で示す特性のものが使用されているものとする。この例では、時刻t1以前にて、H2モード(2輪駆動状態)で車両が走行している。即ち、時刻t1以前では、分配トルクTc(電流I)がゼロに維持され、且つ、切換機構Mが非接続状態に維持されている。Afpの回転速度がゼロで推移し、Arpの回転速度がゼロより大きい値(車速に対応する値)で推移している。
【0045】
時刻t1にて、マップの学習処理が開始されている。即ち、時刻t1以降、電流Iがゼロから徐々に増大される。電流Iが値I0に達する時刻t2にて、Afpが回転を開始している。換言すれば、時刻t2にて、分配トルクTcの実際値がゼロから増大している。従って、値I0が分配トルク伝達開始時電流値Izとして取得される。この結果、マップが、「図3に実線で示す特性」を有するものから「図3に破線で示す特性」を有するものに更新される(図3において、特性線が値I0だけ右に平行移動される)。なお、この特性のずれは、例えば、クラッチ機構の経年変化等によって隣接するクラッチ板の間の隙間が大きくなったこと等に起因する。時刻t2の直後にて、電流Iは再びゼロに戻されている。この結果、時刻t2の直後にて、Afpの回転速度、及び分配トルクTcも再びゼロに戻っている。
【0046】
時刻t3にて、H2モードが維持された状態で、車両が停止している。停車中における時刻t4にて、運転者によるスイッチSの操作によって、走行モードが「H2モード」から「H4Autoモード」に変更されている。この結果、時刻t4(実際には、時刻t4の少し後)にて切換機構Mが「非接続状態」から「接続状態」へと変更されている。その後、時刻t5にて車両が発進している。この発進は、分配トルクTc=0の状態(即ち、2輪駆動状態)でなされている。その結果、時刻t6以降、駆動輪である後輪にスリップ(Arpの回転速度>Afpの回転速度)が発生している。
【0047】
このような状況において、本装置による作用・効果を説明するため、先ず、比較例(図6の1点鎖線を参照)として、上述したマップの更新がなされない場合について説明する。この場合、時刻t4〜t6の間も、Tcの目標値がゼロに維持されることに起因して、前記当初のマップ(図3の実線を参照)に従って、電流Iがなおゼロに維持される(図6の1点鎖線を参照)。時刻t6にて、後輪にスリップが検出されたことに基づいて、Tcの目標値がゼロから増大するとともに、前記当初のマップ(図3の実線を参照)に従って電流Iがゼロから増大していく(図6の1点鎖線を参照)。しかしながら、電流Iが値I0に達する時刻t6’までは、Tcの実際値がゼロに維持され、時刻t6’以降、Tcの実際値がゼロから増大していく。換言すれば、スリップが発生する時刻t6以降において駆動状態が2輪駆動状態から4輪駆動状態に直ちに移行すべきところ、2輪駆動状態から4輪駆動状態への移行タイミングが時刻t6’まで遅れる。この結果、後輪にスリップが発生する期間が長くなり(時刻t6〜t7’)、且つ、後輪のスリップ量(Arpの回転速度からAfpの回転速度を減じた値)のピークが大きくなる。従って、ドライバビリティが悪化する。
【0048】
これに対し、本装置では、H4Autoモードにおいて、Tcの目標値がゼロのときに電流IがIz(=I0)に維持され、且つ、上述した更新したマップ(図3の破線を参照)に従って電流Iが調整される。従って、時刻t4以降において、電流IがIz(=I0)に維持される(図6の実線を参照)。時刻t6にて、後輪にスリップが検出されたことに基づいて、Tcの目標値がゼロから増大するとともに、上述した更新したマップ(図3の破線を参照)に従って電流IがIz(=I0)から増大していく。従って、時刻t6以降、Tcの実際値がゼロから直ちに増大していく。換言すれば、スリップが発生する時刻t6以降において、駆動状態が2輪駆動状態から4輪駆動状態に直ちに移行する。従って、上述した比較例と比べて、後輪にスリップが発生する期間が短くなり(時刻t6〜t7)、且つ、後輪のスリップ量(Arpの回転速度からAfpの回転速度を減じた値)のピークも小さくなる。即ち、上述した比較例と比べて、ドライバビリティが向上する。
【0049】
以上より、本装置によれば、オンデマンド式の車両の駆動状態制御装置において、多板クラッチ機構C/Tの個体差、経年変化等に起因する、2輪駆動状態から4輪駆動状態への移行時のドライバビリティの悪化が抑制され得る。
【0050】
本発明は上記実施形態に限定されることはなく、本発明の範囲内において種々の変形例を採用することができる。例えば、上記実施形態では、2輪駆動状態として後輪駆動状態が採用されている。これに対し、2輪駆動状態として前輪駆動状態が採用されてもよい。この場合、トランスファT/Fの第1出力軸A2が前輪側プロペラシャフトAfpと接続され、トランスファT/Fの第2出力軸A3が後輪側プロペラシャフトAfpと接続され、切換機構Mが左右後輪の車軸Arl,Arrの一方に介装されるように構成すればよい。
【0051】
また、上記実施形態においては、トランスファT/F内に副変速機構Zが備えられているが、副変速機構がなくてもよい。
【符号の説明】
【0052】
E/G…エンジン、A/T…自動変速機、T/F…トランスファ、C/T…多板クラッチ機構、M…切換機構、A1…入力軸、A2…第1出力軸、A3…第2出力軸、Vfr,Vfl,Vrr,Vrl…車輪速度センサ、Gx…前後加速度センサ、Vfp…前輪側プロペラシャフト回転速度センサ、ECU…電子制御装置
【技術分野】
【0001】
本発明は、車両の駆動状態制御装置に関する。
【背景技術】
【0002】
従来より、入力軸と、第1出力軸と、第2出力軸とを備えたトランスファが広く知られている(例えば、特許文献1を参照)。入力軸は、車両のエンジンに接続された変速機の出力軸と接続される。第1出力軸は、後輪側プロペラシャフト(第1プロペラシャフト)を介して左右後輪(第1左右輪)と接続され、第2出力軸は、前輪側プロペラシャフト(第2プロペラシャフト)を介して左右前輪(第2左右輪)と接続される。
【0003】
このトランスファは、入力軸の駆動トルクの一部であって第2出力軸に分配されるトルク(分配トルク)を調整可能なクラッチ機構を備える。第2出力軸にはクラッチ機構により調整された分配トルクが伝達され、第1出力軸には入力軸の駆動トルクから分配トルクを減じて得られるトルクが伝達される。従って、分配トルクがゼロのとき、2輪駆動状態(後輪駆動状態)が得られる。一方、分配トルクがゼロより大きいとき、4輪駆動状態が得られるとともに、分配トルクの調整によって前後輪のトルク配分が調整され得る。
【0004】
上述のトランスファが搭載された車両であって、左右前輪の一方(特定車輪)の車軸に介装された切換機構を備えるものも広く知られている。この切換機構は、特定車輪と前輪側ディファレンシャルとの間で動力伝達系統が形成される「接続状態」と、特定車輪と前輪側ディファレンシャルとの間で動力伝達系統が形成されない「非接続状態」と、を選択的に実現可能に構成される。
【0005】
この切換機構が搭載された車両では、通常、2輪駆動走行モードと4輪駆動走行モードとを含む複数の走行モードのうちから1つの走行モードを選択する選択スイッチが備えられる。4輪駆動走行モードが選択された場合、切換機構が「接続状態」に維持されるとともに分配トルクが左右後輪のスリップ状態等の車両の走行状態に基づいて調整される。これにより、通常、分配トルクがゼロに維持されて、2輪駆動状態が得られる。一方、左右後輪のスリップが発生した場合等の所定条件下においてのみ、分配トルクがゼロより大きい値に調整されて、駆動状態が2輪駆動状態から4輪駆動状態に自動的に切り換えられる。このような駆動制御は、「オンデマンド式」とも呼ばれる。
【0006】
2輪駆動走行モードが選択された場合、切換機構が「非接続状態」に維持されるとともに分配トルクがゼロに維持される。この結果、2輪駆動状態が得られるとともに、車両走行中において、前輪側プロペラシャフトの空回りの発生が防止(抑制)され得る。従って、慣性モーメントが比較的大きい前輪側プロペラシャフトを空回りさせるための駆動エネルギーが不要となる。この結果、切換機構が搭載されない車両(即ち、2輪駆動状態にて前輪側プロペラシャフトの空回りが発生する車両)に比して、車両の燃費を良くすることができる。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特許第3650255号公報
【発明の概要】
【0008】
上述したクラッチ機構は、通常、多板クラッチ式電子制御カップリング等で構成される。係るクラッチ機構では、供給される電流が大きくなるにつれて、分配トルクがより大きい値に調整される。係るクラッチ機構を制御するにあたり、「クラッチ機構に供給される電流」と「クラッチ機構により調整される分配トルク」との間の関係を規定するマップが予め作製される。4輪駆動走行モードが選択された状態では、車両の走行状態から分配トルクの目標値が決定され、その分配トルクの目標値が前記マップに代入されることによって電流の値が決定される。このように決定された電流がクラッチ機構に供給されることによって、分配トルクが前記車両の走行状態に基づいて調整される。
【0009】
ところで、上述したクラッチ機構(多板クラッチ式電子制御カップリング)においては、クラッチ機構の個体差、経年変化等に起因して、電流に対する分配トルクの実際値の特性が前記予め作製されたマップに基づく特性からずれ得る。より具体的には、例えば、多板クラッチ内において隣接するクラッチ板の間の隙間が大きくなった場合、或る大きさの分配トルクを発生するために必要な電流の大きさが大きくなる。この結果、分配トルクの実際値がゼロから増大開始するタイミングが遅れる。このことは、オンデマンド式において、駆動状態が2輪駆動状態から4輪駆動状態に移行するタイミングが遅れて、ドライバビリティが悪化することを意味する。
【0010】
本発明は、上記問題に対処するためのものであり、その目的は、オンデマンド式の車両の駆動状態制御装置において、クラッチ機構の個体差、経年変化等に起因する、2輪駆動状態から4輪駆動状態への移行時のドライバビリティの悪化を抑制し得るものを提供することにある。
【0011】
本発明に係る車両の駆動状態制御装置は、上述と同じトランスファ、切換機構、及び、制御手段を備えるオンデマンド式の装置である。本発明による車両の駆動状態制御装置の特徴は、前記制御手段が、前記車両の走行中且つ前記2輪駆動走行モードが選択された状態において、前記第2プロペラシャフトの回転が停止していると判定されたことを条件に、クラッチ機構に供給される電流を徐々に増大していき、第2プロペラシャフトの回転が開始する時点での電流の値を分配トルク伝達開始時電流値(Iz)として取得することにある。ここにおいて、前記クラッチ機構に供給される電流が大きいほど分配トルクが大きくなるように前記クラッチ機構が構成されている。
【0012】
加えて、本発明による車両の駆動状態制御装置の特徴は、前記制御手段が、前記4輪駆動走行モードが選択された状態において、前記分配トルクの目標値がゼロのとき、前記取得された分配トルク伝達開始時電流値の電流を前記クラッチ機構に供給するように構成されたことにある。ここにおいて、前記取得された分配トルク伝達開始時電流値を用いて、前記分配トルクがゼロから増大するときの前記電流の値が前記分配トルク伝達開始時電流値となるように、前記関係が更新されるように構成され、前記4輪駆動走行モードが選択された状態において、前記分配トルクの目標値と前記更新された関係とに基づいて決定される前記電流を前記クラッチ機構に供給することによって、前記分配トルクが前記車両の走行状態に基づいて調整するように構成されることがより好ましい。
【0013】
これによれば、4輪駆動走行モードにおいて、分配トルクの目標値がゼロのときに分配トルク伝達開始時電流値の電流がクラッチ機構に供給される。従って、分配トルクの目標値のゼロからの増大に伴って電流が分配トルク伝達開始時電流値から僅かに増大することによって、分配トルクの実際値がゼロから直ちに増大し得る。従って、上述のように、多板クラッチ内において隣接するクラッチ板の間の隙間が大きくなった場合等においても、分配トルクがゼロから増大開始するタイミングが遅れる事態が発生し難い。即ち、クラッチ機構の個体差、経年変化等に起因する、2輪駆動状態から4輪駆動状態への移行時のドライバビリティの悪化が抑制され得る。
【図面の簡単な説明】
【0014】
【図1】本発明の実施形態に係る車両の駆動状態制御装置を搭載した車両の動力伝達系統を模式的に示した図である。
【図2】図1に示す多板クラッチ機構の具体的な構成の一例を示す模式図である。
【図3】図1に示す多板クラッチ機構についてのクラッチ駆動電流と分配トルクとの関係を示すグラフである。
【図4】図1に示したECUにより実行される、マップの学習を行うためのルーチンを示したフローチャートである。
【図5】図1に示したECUにより実行される、4輪駆動走行モード(H4Auto)での分配トルクの制御を行うためのルーチンを示したフローチャートである。
【図6】図4及び図5に示したルーチンに基づいて、マップの学習、並びに4輪駆動走行モードでの分配トルクの制御が行われる場合の一例を示したタイムチャートである。
【発明を実施するための形態】
【0015】
以下、本発明の実施形態に係る車両の駆動状態制御装置(以下、「本装置」とも呼ぶ。)について図面を参照しつつ説明する。図1は、本装置を搭載した車両の駆動システムの動力伝達系統を示す。この駆動システムは、トランスファT/Fと、後輪側ディファレンシャルD/Frと、前輪側ディファレンシャルD/Ffと、切換機構Mと、車輪速度センサVfr,Vfl,Vrr,Vrlと、前輪側プロペラシャフト回転速度センサVfpと、前後加速度センサGxと、2駆・4駆切換スイッチSと、電子制御装置ECUと、を備える。
【0016】
トランスファT/Fは、入力軸A1と、第1出力軸A2と、第2出力軸A3とを備える。入力軸A1は、エンジンE/Gと接続された自動変速機A/Tの出力軸と接続され、入力軸A1とエンジンE/Gとの間で動力伝達系統が形成されている。第1出力軸A2は、後輪側プロペラシャフトArpを介して後輪側ディファレンシャルD/Frと接続され、第1出力軸A2と後輪側ディファレンシャルD/Frとの間で動力伝達系統が形成されている。第2出力軸A3は、前輪側プロペラシャフトAfpを介して前輪側ディファレンシャルD/Ffと接続され、第2出力軸A3と前輪側ディファレンシャルD/Ffとの間で動力伝達系統が形成されている。
【0017】
また、トランスファT/Fは、副変速機構Zと、多板クラッチ機構C/Tとを備える。副変速機構Zは、周知の構成の1つを有していて、入力軸A1の回転速度に対する第1出力軸A2の回転速度の割合が「1」となるHIGHモードと、同割合が「1」未満の一定値となるLOWモードと、を選択的に切り換え可能に構成されている。
【0018】
図2に示すように、多板クラッチ機構C/Tは、周知の構成を有する多板クラッチ式電子制御カップリングで構成されている。C/Tは、「入力軸A1の駆動トルク」の一部であって第2出力軸A3に分配されるトルク(以下、「分配トルクTc」と呼ぶ)を調整可能となっている。第2出力軸A3にはC/Tによって調整された分配トルクTcが伝達され、第1出力軸A2には「入力軸A1の駆動トルク」から分配トルクTcを減じて得られるトルクが伝達される。
【0019】
従って、分配トルクTcがゼロのとき、2輪駆動状態(後輪駆動状態)が得られる。一方、Tcがゼロより大きいとき、4輪駆動状態が得られるとともに、Tcの調整によって前後輪のトルク配分が調整され得る。
【0020】
分配トルクTcは、多板クラッチ機構C/T内の図示しないアクチュエータを駆動するための電流(以下、「クラッチ駆動電流I」と呼ぶ)を調整することにより調整可能となっている。具体的には、図3に示すように、Tcは、Iが「0」から増大するにつれて「0」から増大するように調整される。
【0021】
後輪側ディファレンシャルD/Frは、周知の構成の1つを有していて、後輪側プロペラシャフトArpのトルクを右後輪の車軸Arr及び左後輪の車軸Arlを介して左右後輪に分配するようになっている。同様に、前輪側ディファレンシャルD/Ffは、周知の構成の1つを有していて、前輪側プロペラシャフトAfpのトルクを右前輪の車軸Afr及び左前輪の車軸Aflを介して左右前輪に分配するようになっている。
【0022】
切換機構Mは、右前輪の車軸Afrに介装されていて、右前輪と前輪側ディファレンシャルD/Ffとの間で動力伝達系統が形成される「接続状態」と、右前輪と前輪側ディファレンシャルD/Ffとの間で動力伝達系統が形成されない「非接続状態」とを選択的に実現可能に構成されている。以下、右前輪の車軸Afrにおいて、切換機構Mと右前輪との間の部分を特に「第1軸Afr1」と呼び、切換機構Mと前輪側ディファレンシャルD/Ffとの間の部分を特に「第2軸Afr2」と呼ぶ。なお、この切換機構Mは、第1、第2軸Afr1,Afr2の回転速度を近づけるための回転同期装置(シンクロナイザ)が備えられていてもいなくてもよい。また、切換機構Mは、左前輪の車軸Aflに介装されていてもよい。
【0023】
切換機構Mは、例えば、ドッグ式(スプライン嵌合式)の構成を有している。この場合、切換機構Mは、例えば、第1、第2軸Afr1,Afr2の一方と一体のハブ(外スプライン又は内スプライン)と、前記ハブとスプライン嵌合するスリーブ(内スプライン又は外スプライン)と、第1、第2軸Afr1,Afr2の他方と一体のピース(外スプライン又は内スプライン)と、前記スリーブの位置を調整するフォークと、を備える。そして、スリーブが第1位置にある場合にピースとスリーブとがスプライン嵌合することで「接続状態」が得られ、スリーブが第2位置にある場合にピースとスリーブとがスプライン嵌合しないことで「非接続状態」が得られる。
【0024】
車輪速度センサVfr,Vfl,Vrr,Vrlは、対応する車輪の車輪速度をそれぞれ検出するようになっている。前輪側プロペラシャフト回転速度センサVfpは、前輪側プロペラシャフトAfpの回転速度を検出するようになっている。前後加速度センサGxは、車両の前後方向の加速度(前後加速度)を検出するようになっている。2駆・4駆切換スイッチSは、車両の乗員の操作により、「2輪駆動走行(H2)モード」と、「4輪駆動走行(H4Lock)モード」と、「オンデマンド4輪駆動走行(H4Auto)」との何れか1つを選択可能に構成されている。
【0025】
電子制御装置ECUは、周知の構成の1つを有するマイクロコンピュータである。電子制御装置ECUは、車両の状態に応じて、エンジンE/G、及び自動変速機A/Tの状態を制御するようになっている。また、電子制御装置ECUは、運転者により操作される操作部材(図示せず)の状態(位置)に基づいて、副変速機構Zの状態(HIGHモードかLOWモードか)を制御するためのアクチュエータ(図示せず)を制御するようになっている。
【0026】
加えて、電子制御装置ECUは、2駆・4駆切換スイッチSの状態、及び、車両の走行状態(各車輪の回転速度、車両の前後加速度等)に応じて、多板クラッチ機構C/Tの分配トルクTcを制御するためのアクチュエータ(図示せず)を制御し、並びに、スイッチSの状態に応じて、切換機構Mの状態(「接続状態」か「非接続状態」か)を制御するためのアクチュエータ(図示せず)を制御するようになっている。
【0027】
具体的には、スイッチSが「H2モード」に設定されている場合、切換機構Mが「非接続状態」に維持され、且つ、分配トルクTcがゼロに維持される。この結果、2輪(後輪)駆動状態が常に得られるとともに、車両走行中において、前輪側ディファレンシャルD/Ffの作用により前輪側プロペラシャフトAfpの回転が(ほぼ)停止して、Afpの空回りの発生が防止(抑制)され得る。従って、慣性モーメントが比較的大きいAfpを空回りさせるための駆動エネルギーが不要となる。この結果、切換機構Mが搭載されない車両(即ち、2輪駆動状態にて前輪側プロペラシャフトの空回りが発生する車両)に比して、車両の燃費を良くすることができる。
【0028】
スイッチSが「H4Lockモード」に設定されている場合、切換機構Mが「接続状態」に維持され、且つ、分配トルクTcが最大に維持される。この結果、4輪駆動状態が常に得られる。
【0029】
スイッチSが「H4Autoモード」に設定されている場合、切換機構Mが「接続状態」に維持され、且つ、分配トルクTcが車両の走行状態に基づいて調整される。具体的には、通常、Tcがゼロに維持されて、2輪駆動状態が得られる。一方、左右後輪のスリップが実際に発生したと判定された場合や、左右後輪のスリップが発生する可能性が高いと判定された場合等、所定条件下においてのみ、車両の走行状態に基づいてTcがゼロより大きい値に調整されて、駆動状態が2輪駆動状態から4輪駆動状態に自動的に切り換えられる。このように、「H4Autoモード」が設定されている場合、「オンデマンド式」の駆動状態制御装置が得られる。「H4Autoモード」に設定されている場合におけるTcの制御については更に後述する。
【0030】
(マップの学習)
上述の図3に示すように、多板クラッチ機構C/Tでは、供給される電流Iが大きくなるにつれて、分配トルクTcがより大きい値に調整される。本装置では、C/Tを制御するため、クラッチ駆動電流Iと分配トルクTcとの間の関係を規定するマップ(図3の実線を参照)が予め作製される。このマップは、C/Tの標準品(マスタ品)を使用した実験等を通して作製され得る。
【0031】
本装置では、「H4Autoモード」が設定されている場合、車両の走行状態から分配トルクTcの目標値が決定され、その目標値が前記マップに代入されることによって電流Iの値が決定される。このように決定された電流Iがクラッチ機構に供給されることによって、分配トルクTcが車両の走行状態に基づいて調整される。
【0032】
ところで、クラッチ機構C/Tでは、クラッチ機構の個体差、経年変化等に起因して、電流Iに対する分配トルクTcの実際値の特性が前記マップに基づく予め定められた特性(図3の実線を参照)からずれ得る。より具体的には、例えば、C/T内において隣接するクラッチ板の間の隙間が初期値より大きくなった場合、或る大きさの分配トルクを発生するために必要な電流Iの大きさが大きくなる。
【0033】
例えば、図3の破線に示す特性は、図3の実線で示す予め定められた特性から図3において右側に値「I0」だけずれている。換言すれば、或る大きさの分配トルクを発生するために必要な電流Iの大きさが値「I0」だけ大きくなっている。この結果、図3の破線に示す特性を有するクラッチ機構が使用される場合、分配トルクTcの実際値がゼロから増大開始するタイミングが値「I0」に相当する分だけ遅れる。このことは、「H4Autoモード」において、駆動状態が2輪駆動状態から4輪駆動状態に移行するタイミングが遅れて、ドライバビリティが悪化することを意味する。
【0034】
係るドライバビリティの悪化を抑制するためには、上述した「電流Iに対する分配トルクTcの実際値の特性のずれ」を補償する必要がある。本装置では、この補償を達成するため、前記マップの学習(更新)が行われる。係るマップの更新は、「H2モード」における車両走行中において前輪側プロペラシャフトAfpの回転が停止する現象を利用して行われる。以下、図4を参照しながら、マップの学習(更新)に関する処理の流れについて説明する。
【0035】
図4から理解できるように、マップの学習処理(ステップ420)は、「H2モード」が選択され且つ切換機構Mが「非接続状態」にあること、前輪側プロペラシャフトAfpの回転が停止していること、並びに、学習タイミングが到来していること、を条件に実行される(ステップ405、410、415で「Yes」と判定)。Afpの回転の停止は、センサVfpから検出されるAfpの回転速度が所定の微小値(ゼロを含む)以下である等に基づいて判定され得る。
【0036】
「学習タイミング」は、「車両が走行中(車速がゼロよりも大きい)であること」、並びに、「マップの学習(更新)が未実施であること、又は、前回のマップの学習(更新)時点からの車両の走行距離が所定距離以上であること」、を条件に到来する。
【0037】
マップの学習処理(ステップ420)では、多板クラッチ機構C/Tに供給される電流Iがゼロから徐々に増大される。この過程において、前輪側プロペラシャフトAfpの回転が開始する時点が検出され、この時点での電流Iの値が「分配トルク伝達開始時電流値Iz」として取得される(ステップ425)。このIzは、電流Iのゼロからの増大過程において、分配トルクTcの実際値がゼロから増大する時点に対応する電流値ということもできる。図3の破線で示した例では、Izが値I0となる。
【0038】
マップの学習処理が完了すると、マップの更新が行われる(ステップ430)。具体的には、取得された分配トルク伝達開始時電流値Izを用いて、分配トルクの実際値がゼロから増大するときの電流Iの値がIzとなるように、マップが更新される。図3に示す例では、マップの特性が、「実線で示す特性」から「破線で示す特性」に更新される(図3において、特性線が値I0だけ右に平行移動される)。
【0039】
(H4Autoモードでの分配トルクの制御)
本装置では、「H4Autoモード」が設定されている場合、上述した更新したマップを利用して分配トルクTcが調整される。以下、図5を参照しながら、H4AutoモードでのTcの制御に関する処理の流れについて説明する。
【0040】
図5から理解できるように、H4AutoモードでのTcの制御は、「H4Autoモード」が選択され且つ切換機構Mが「接続状態」にあること、を条件に実行される(ステップ505で「Yes」と判定)。この条件が成立している状態において、先ず、車両の走行状態に基づいて分配トルクTcの目標値が決定される(ステップ510)。
【0041】
具体的には、例えば、左右後輪のスリップが実際に発生したと判定されておらず、且つ、左右後輪のスリップが発生する可能性が高いとも判定されていない場合、Tcの目標値がゼロに維持される。一方、左右後輪のスリップが実際に発生したと判定され、或いは、左右後輪のスリップが発生する可能性が高いと判定されている場合、車両の走行状態に応じてTcの目標値がゼロより大きい値に決定される。左右後輪のスリップが実際に発生したか否かの判定は、例えば、各車輪の回転速度、車両の前後加速度等の情報に基づいて達成され得る。左右後輪のスリップが発生する可能性が高いか否かの判定は、例えば、アクセルペダル(図示せず)の踏み込み量の急激な増大等が発生したか否かに基づいて達成され得る。
【0042】
分配トルクTcの目標値が決定されると、先のステップ430の処理によって更新された最新のマップにその目標値を代入して、電流Iが決定される(ステップ515)。Tcの目標値がゼロの場合、電流Iが上記Izに設定される。最新のマップとは、マップの更新が複数回実行されている場合には、最後の更新の後のマップを指す。なお、マップの更新が未だなされていない場合には、最新のマップとして、当初の(オリジナルの)マップが使用される。
【0043】
電流Iが決定されると、多板クラッチ機構C/Tに電流Iが供給される(ステップ520)。これにより、分配トルクTcが車両の走行状態に基づいて調整される。このように、H4Autoモードでは、更新した最新のマップを利用してTcが調整される。従って、当初の(オリジナルの)マップが利用され続ける場合と比較して、Tcの実際値が目標値と一致し易くなり、ドライバビリティが向上し得る。
【0044】
(作動例)
図6は、図1に示した車両が走行する場合の一例を示す。この例では、前記当初のマップとして、図3の実線で示す特性のものが使用されているものとする。この例では、時刻t1以前にて、H2モード(2輪駆動状態)で車両が走行している。即ち、時刻t1以前では、分配トルクTc(電流I)がゼロに維持され、且つ、切換機構Mが非接続状態に維持されている。Afpの回転速度がゼロで推移し、Arpの回転速度がゼロより大きい値(車速に対応する値)で推移している。
【0045】
時刻t1にて、マップの学習処理が開始されている。即ち、時刻t1以降、電流Iがゼロから徐々に増大される。電流Iが値I0に達する時刻t2にて、Afpが回転を開始している。換言すれば、時刻t2にて、分配トルクTcの実際値がゼロから増大している。従って、値I0が分配トルク伝達開始時電流値Izとして取得される。この結果、マップが、「図3に実線で示す特性」を有するものから「図3に破線で示す特性」を有するものに更新される(図3において、特性線が値I0だけ右に平行移動される)。なお、この特性のずれは、例えば、クラッチ機構の経年変化等によって隣接するクラッチ板の間の隙間が大きくなったこと等に起因する。時刻t2の直後にて、電流Iは再びゼロに戻されている。この結果、時刻t2の直後にて、Afpの回転速度、及び分配トルクTcも再びゼロに戻っている。
【0046】
時刻t3にて、H2モードが維持された状態で、車両が停止している。停車中における時刻t4にて、運転者によるスイッチSの操作によって、走行モードが「H2モード」から「H4Autoモード」に変更されている。この結果、時刻t4(実際には、時刻t4の少し後)にて切換機構Mが「非接続状態」から「接続状態」へと変更されている。その後、時刻t5にて車両が発進している。この発進は、分配トルクTc=0の状態(即ち、2輪駆動状態)でなされている。その結果、時刻t6以降、駆動輪である後輪にスリップ(Arpの回転速度>Afpの回転速度)が発生している。
【0047】
このような状況において、本装置による作用・効果を説明するため、先ず、比較例(図6の1点鎖線を参照)として、上述したマップの更新がなされない場合について説明する。この場合、時刻t4〜t6の間も、Tcの目標値がゼロに維持されることに起因して、前記当初のマップ(図3の実線を参照)に従って、電流Iがなおゼロに維持される(図6の1点鎖線を参照)。時刻t6にて、後輪にスリップが検出されたことに基づいて、Tcの目標値がゼロから増大するとともに、前記当初のマップ(図3の実線を参照)に従って電流Iがゼロから増大していく(図6の1点鎖線を参照)。しかしながら、電流Iが値I0に達する時刻t6’までは、Tcの実際値がゼロに維持され、時刻t6’以降、Tcの実際値がゼロから増大していく。換言すれば、スリップが発生する時刻t6以降において駆動状態が2輪駆動状態から4輪駆動状態に直ちに移行すべきところ、2輪駆動状態から4輪駆動状態への移行タイミングが時刻t6’まで遅れる。この結果、後輪にスリップが発生する期間が長くなり(時刻t6〜t7’)、且つ、後輪のスリップ量(Arpの回転速度からAfpの回転速度を減じた値)のピークが大きくなる。従って、ドライバビリティが悪化する。
【0048】
これに対し、本装置では、H4Autoモードにおいて、Tcの目標値がゼロのときに電流IがIz(=I0)に維持され、且つ、上述した更新したマップ(図3の破線を参照)に従って電流Iが調整される。従って、時刻t4以降において、電流IがIz(=I0)に維持される(図6の実線を参照)。時刻t6にて、後輪にスリップが検出されたことに基づいて、Tcの目標値がゼロから増大するとともに、上述した更新したマップ(図3の破線を参照)に従って電流IがIz(=I0)から増大していく。従って、時刻t6以降、Tcの実際値がゼロから直ちに増大していく。換言すれば、スリップが発生する時刻t6以降において、駆動状態が2輪駆動状態から4輪駆動状態に直ちに移行する。従って、上述した比較例と比べて、後輪にスリップが発生する期間が短くなり(時刻t6〜t7)、且つ、後輪のスリップ量(Arpの回転速度からAfpの回転速度を減じた値)のピークも小さくなる。即ち、上述した比較例と比べて、ドライバビリティが向上する。
【0049】
以上より、本装置によれば、オンデマンド式の車両の駆動状態制御装置において、多板クラッチ機構C/Tの個体差、経年変化等に起因する、2輪駆動状態から4輪駆動状態への移行時のドライバビリティの悪化が抑制され得る。
【0050】
本発明は上記実施形態に限定されることはなく、本発明の範囲内において種々の変形例を採用することができる。例えば、上記実施形態では、2輪駆動状態として後輪駆動状態が採用されている。これに対し、2輪駆動状態として前輪駆動状態が採用されてもよい。この場合、トランスファT/Fの第1出力軸A2が前輪側プロペラシャフトAfpと接続され、トランスファT/Fの第2出力軸A3が後輪側プロペラシャフトAfpと接続され、切換機構Mが左右後輪の車軸Arl,Arrの一方に介装されるように構成すればよい。
【0051】
また、上記実施形態においては、トランスファT/F内に副変速機構Zが備えられているが、副変速機構がなくてもよい。
【符号の説明】
【0052】
E/G…エンジン、A/T…自動変速機、T/F…トランスファ、C/T…多板クラッチ機構、M…切換機構、A1…入力軸、A2…第1出力軸、A3…第2出力軸、Vfr,Vfl,Vrr,Vrl…車輪速度センサ、Gx…前後加速度センサ、Vfp…前輪側プロペラシャフト回転速度センサ、ECU…電子制御装置
【特許請求の範囲】
【請求項1】
車両の動力源(E/G)に接続された変速機(A/T)の出力軸と接続される入力軸(A1)と、前記車両の前輪側プロペラシャフト(Afp)及び後輪側プロペラシャフト(Arp)のうちの一方である第1プロペラシャフトと接続される第1出力軸(A2)と、前記前輪側プロペラシャフト及び前記後輪側プロペラシャフトのうちの他方である第2プロペラシャフトと接続される第2出力軸(A3)と、前記入力軸の駆動トルクの一部であって前記第2出力軸に分配されるトルクである分配トルク(Tc)を調整可能なクラッチ機構(C/T)と、を備え、前記第2出力軸には前記クラッチ機構により調整された前記分配トルクが伝達され、前記第1出力軸には前記入力軸の駆動トルクから前記分配トルクを減じて得られるトルクが伝達されるように構成されたトランスファ(T/F)と、
前記第1プロペラシャフトと接続され、左右前輪及び左右後輪のうちの一方である第1左右輪のそれぞれの車軸を介して前記第1プロペラシャフトのトルクを前記第1左右輪の回転速度差を許容しつつ前記第1左右輪に分配する第1ディファレンシャル(D/Fr)と、
前記第2プロペラシャフトと接続され、左右前輪及び左右後輪のうちの他方である第2左右輪のそれぞれの車軸を介して前記第2プロペラシャフトのトルクを前記第2左右輪の回転速度差を許容しつつ前記第2左右輪に分配する第2ディファレンシャル(D/Ff)と、
前記第2左右輪の一方である特定車輪の車軸(Afr)に介装され、前記特定車輪と前記第2ディファレンシャルとの間で動力伝達系統が形成される接続状態と、前記特定車輪と前記第2ディファレンシャルとの間で動力伝達系統が形成されない非接続状態と、を選択的に実現する切換機構(M)と、
を備えた車両に適用され、
2輪駆動走行モード(H2)と4輪駆動走行モード(H4Auto)とを含む複数の走行モードのうちから1つの走行モードを選択する選択手段(S)と、
前記2輪駆動走行モードが選択された状態では前記切換機構を前記非接続状態に維持するとともに前記分配トルクをゼロに維持し、前記4輪駆動走行モードが選択された状態では前記切換機構を前記接続状態に維持するとともに前記分配トルクを前記車両の走行状態に基づいて調整する制御手段(ECU)と、
を備えた車両の駆動状態制御装置において、
前記制御手段は、
前記クラッチ機構に供給される電流(I)と前記クラッチ機構により調整される分配トルク(Tc)との間の予め定められた関係を記憶し、
前記4輪駆動走行モードが選択された状態において、前記車両の走行状態から決定される前記分配トルクの目標値と前記関係とに基づいて決定される前記電流を前記クラッチ機構に供給することによって、前記分配トルクを前記車両の走行状態に基づいて調整するように構成され、
前記制御手段は、
前記車両の走行中且つ前記2輪駆動走行モードが選択された状態において、前記第2プロペラシャフトの回転が停止していると判定されたことを条件に、前記クラッチ機構に供給される電流を徐々に増大していき、前記第2プロペラシャフトの回転が開始する時点での前記電流の値を分配トルク伝達開始時電流値(Iz)として取得し、
前記制御手段は、
前記4輪駆動走行モードが選択された状態において、前記分配トルクの目標値がゼロのとき、前記取得された分配トルク伝達開始時電流値の電流を前記クラッチ機構に供給するように構成された、車両の駆動状態制御装置。
【請求項2】
請求項1に記載の車両の駆動状態制御装置において、
前記制御手段は、
前記取得された分配トルク伝達開始時電流値を用いて、前記分配トルクがゼロから増大するときの前記電流の値が前記分配トルク伝達開始時電流値となるように、前記関係を更新するように構成され、
前記制御手段は、
前記4輪駆動走行モードが選択された状態において、前記分配トルクの目標値と前記更新された関係とに基づいて決定される前記電流を前記クラッチ機構に供給することによって、前記分配トルクを前記車両の走行状態に基づいて調整するように構成された、車両の駆動状態制御装置。
【請求項3】
請求項1又は請求項2に記載の車両の駆動状態制御装置において、
前記第1及び第2プロペラシャフトはそれぞれ、前記後輪側及び前輪側プロペラシャフトであり、
前記第1及び第2左右輪はそれぞれ、前記左右後輪及び左右前輪である、車両の駆動状態制御装置。
【請求項1】
車両の動力源(E/G)に接続された変速機(A/T)の出力軸と接続される入力軸(A1)と、前記車両の前輪側プロペラシャフト(Afp)及び後輪側プロペラシャフト(Arp)のうちの一方である第1プロペラシャフトと接続される第1出力軸(A2)と、前記前輪側プロペラシャフト及び前記後輪側プロペラシャフトのうちの他方である第2プロペラシャフトと接続される第2出力軸(A3)と、前記入力軸の駆動トルクの一部であって前記第2出力軸に分配されるトルクである分配トルク(Tc)を調整可能なクラッチ機構(C/T)と、を備え、前記第2出力軸には前記クラッチ機構により調整された前記分配トルクが伝達され、前記第1出力軸には前記入力軸の駆動トルクから前記分配トルクを減じて得られるトルクが伝達されるように構成されたトランスファ(T/F)と、
前記第1プロペラシャフトと接続され、左右前輪及び左右後輪のうちの一方である第1左右輪のそれぞれの車軸を介して前記第1プロペラシャフトのトルクを前記第1左右輪の回転速度差を許容しつつ前記第1左右輪に分配する第1ディファレンシャル(D/Fr)と、
前記第2プロペラシャフトと接続され、左右前輪及び左右後輪のうちの他方である第2左右輪のそれぞれの車軸を介して前記第2プロペラシャフトのトルクを前記第2左右輪の回転速度差を許容しつつ前記第2左右輪に分配する第2ディファレンシャル(D/Ff)と、
前記第2左右輪の一方である特定車輪の車軸(Afr)に介装され、前記特定車輪と前記第2ディファレンシャルとの間で動力伝達系統が形成される接続状態と、前記特定車輪と前記第2ディファレンシャルとの間で動力伝達系統が形成されない非接続状態と、を選択的に実現する切換機構(M)と、
を備えた車両に適用され、
2輪駆動走行モード(H2)と4輪駆動走行モード(H4Auto)とを含む複数の走行モードのうちから1つの走行モードを選択する選択手段(S)と、
前記2輪駆動走行モードが選択された状態では前記切換機構を前記非接続状態に維持するとともに前記分配トルクをゼロに維持し、前記4輪駆動走行モードが選択された状態では前記切換機構を前記接続状態に維持するとともに前記分配トルクを前記車両の走行状態に基づいて調整する制御手段(ECU)と、
を備えた車両の駆動状態制御装置において、
前記制御手段は、
前記クラッチ機構に供給される電流(I)と前記クラッチ機構により調整される分配トルク(Tc)との間の予め定められた関係を記憶し、
前記4輪駆動走行モードが選択された状態において、前記車両の走行状態から決定される前記分配トルクの目標値と前記関係とに基づいて決定される前記電流を前記クラッチ機構に供給することによって、前記分配トルクを前記車両の走行状態に基づいて調整するように構成され、
前記制御手段は、
前記車両の走行中且つ前記2輪駆動走行モードが選択された状態において、前記第2プロペラシャフトの回転が停止していると判定されたことを条件に、前記クラッチ機構に供給される電流を徐々に増大していき、前記第2プロペラシャフトの回転が開始する時点での前記電流の値を分配トルク伝達開始時電流値(Iz)として取得し、
前記制御手段は、
前記4輪駆動走行モードが選択された状態において、前記分配トルクの目標値がゼロのとき、前記取得された分配トルク伝達開始時電流値の電流を前記クラッチ機構に供給するように構成された、車両の駆動状態制御装置。
【請求項2】
請求項1に記載の車両の駆動状態制御装置において、
前記制御手段は、
前記取得された分配トルク伝達開始時電流値を用いて、前記分配トルクがゼロから増大するときの前記電流の値が前記分配トルク伝達開始時電流値となるように、前記関係を更新するように構成され、
前記制御手段は、
前記4輪駆動走行モードが選択された状態において、前記分配トルクの目標値と前記更新された関係とに基づいて決定される前記電流を前記クラッチ機構に供給することによって、前記分配トルクを前記車両の走行状態に基づいて調整するように構成された、車両の駆動状態制御装置。
【請求項3】
請求項1又は請求項2に記載の車両の駆動状態制御装置において、
前記第1及び第2プロペラシャフトはそれぞれ、前記後輪側及び前輪側プロペラシャフトであり、
前記第1及び第2左右輪はそれぞれ、前記左右後輪及び左右前輪である、車両の駆動状態制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−95213(P2013−95213A)
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願番号】特願2011−238173(P2011−238173)
【出願日】平成23年10月31日(2011.10.31)
【出願人】(592058315)アイシン・エーアイ株式会社 (490)
【Fターム(参考)】
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願日】平成23年10月31日(2011.10.31)
【出願人】(592058315)アイシン・エーアイ株式会社 (490)
【Fターム(参考)】
[ Back to top ]