
車両の駆動装置
【課題】車両の走行状態に応じて適切に蓄電装置の放電電流を制御する車両の駆動装置を提供する。
【解決手段】車両の駆動装置は、車輪を回転させる電動機と、蓄電池を含む蓄電装置と、蓄電池に圧力を加える圧力調整装置と、車両の周辺情報を検出する周辺情報検出装置と、車両の周辺情報に基づいて車両の走行状態を制御する走行制御装置とを備える。蓄電池は、正極層、電解質層および負極層の積層体を含み、正極層、電解質層および負極層が粉体により形成されている。走行制御装置が車両の走行状態を制御すべきときに、蓄電池に加える圧力を調整することにより、蓄電池の放電電流の最大値を調整する。
【解決手段】車両の駆動装置は、車輪を回転させる電動機と、蓄電池を含む蓄電装置と、蓄電池に圧力を加える圧力調整装置と、車両の周辺情報を検出する周辺情報検出装置と、車両の周辺情報に基づいて車両の走行状態を制御する走行制御装置とを備える。蓄電池は、正極層、電解質層および負極層の積層体を含み、正極層、電解質層および負極層が粉体により形成されている。走行制御装置が車両の走行状態を制御すべきときに、蓄電池に加える圧力を調整することにより、蓄電池の放電電流の最大値を調整する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の駆動装置に関する。
【背景技術】
【0002】
電動機の出力により車輪を駆動する車両には、電動機に供給する電気を蓄えるための蓄電装置が配置される。蓄電装置には、電動機に電気を供給する放電および制動中などに発電された電気の充電が可能な二次電池が含まれる。このような二次電池には、ニッケル水素電池やリチウムイオン電池等が含まれる。
【0003】
特開平10−214638号公報には、リチウムを挿入または脱離することができる負極及び正極と、非水電解液と、これらを収納する素電池ケースとで構成された素電池を含むリチウム二次電池が開示されている。このリチウム二次電池は、複数個の素電池が組電池ケースに収納されている。素電池ケースの外で組電池ケースの内部の空間には、気体等を充填し、組電池ケース内に生じる静水圧を用いて素電池を加圧することが開示されている。このリチウム二次電池では、素電池中の電極板が同じ圧力状態で加圧されるために、サイクル特性が改善されることが開示されている。
【0004】
一方で、近年においては、車両の運転を支援する装置として、所定の距離を保ちながら前方の車両に追従する装置が知られている。プリウス新型車解説書(トヨタ自動車株式会社サービス技術部、2009年7月30日発行)には、走行車両の速度を一定に保つ機能に加え、先行車両を認識して車速に応じて適切な車間距離を保ちながら追従走行を行なう機能を備えたレーダークルーズコントロール装置が開示されている。
【0005】
また、特開2002−211270号公報には、先行車が存在するときに定車間走行を行なう装置と、先行車が存在しないときに定車速走行を行なう装置とを備えるオートクルーズ装置において、定車間走行の期間中にドライバーが手動操作手段を操作することにより、定車間走行を一時的に解除したり、セット車速を一時的に増加させたりすることが開示されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平10−214638号公報
【特許文献2】特開2002−211270号公報
【非特許文献】
【0007】
【非特許文献1】トヨタ自動車株式会社、「プリウス新型車解説書(品番NM12B0J)」、トヨタ自動車株式会社サービス技術部、2009年7月30日発行、第12章 コントロールシステム、p.12−33〜p12−52
【発明の概要】
【発明が解決しようとする課題】
【0008】
クルーズコントロール装置等の運転を支援する装置を作動することにより、車両の周辺の状況に応じて車速が調整される。原動機が内燃機関のみの場合には、内燃機関のスロットル弁の開度を制御することにより車速が調整される。従来の技術においては、内燃機関および電動機を備えるハイブリッド車両においても、クルーズコントロール装置等の運転を支援する装置を作動した場合に、車速の調整を内燃機関のスロットル弁の開度の制御で行なっている。このために、過剰な燃料を消費し、燃料消費量が多くなっている虞がある。また、内燃機関のスロットル弁の開度の制御では、負荷変動の要求から実際の出力変動までに時間遅れが生じるという課題がある。
【0009】
ところで、電動機により駆動力を得る車両では、定速での走行時や加速を行なう時には、大きな電流が蓄電池から電動機に供給される。例えば、ハイブリッド車両においては、車両を加速するときに内燃機関および電動機が駆動され、電動機には大きな電流が供給される。ところが、蓄電池は、内部抵抗により所定の電流以上で放電を行なうことが困難であるという特性を有する。蓄電池には放電を行うときの電流の最大値が定められ、蓄電装置は、放電時の電流の最大値未満になるように制御される。このために、運転を支援する装置が加速等を行なう場合においても、大きな電流を電動機に供給することが難しいという問題がある。
【0010】
また、車両を減速する時には、ブレーキ装置を駆動するための油圧ポンプやブレーキアクチュエータが電気により駆動される。このために、ブレーキ装置により車両を減速する期間中にも消費電力量が多くなり、蓄電池からの電気の供給量が不足する虞があった。このため、従来の技術においては、ブレーキ装置に必要な電力が大きくなる場合には、空気調整装置、オーディオ機器、またはナビゲーション機器等を一時的に停止したりまたは消費電力が小さな状態にしたりして、ブレーキ装置に供給する電気を確保する場合があった。
【0011】
上記の特開平10−214638号公報においては、車両の運転状態に応じた蓄電装置の制御等は考慮されておらず、リチウム2次電池等の充電および放電が可能な蓄電装置を車両に配置した場合には、適切な蓄電装置の制御を行うことが好ましい。
【0012】
本発明は、車両の周辺情報に応じて車両の走行状態を制御する装置を備え、車両の走行状態に応じて適切に蓄電装置の放電電流を制御する車両の駆動装置を提供することを目的とする。
【課題を解決するための手段】
【0013】
本発明の車両の駆動装置は、車輪を回転させる駆動力を生じる電動機と、蓄電池を含み、電動機に電気を供給する蓄電装置と、蓄電池に圧力を加えることができるように形成されており、蓄電池に加える圧力を調整可能な圧力調整手段と、車両の周辺情報を検出する周辺情報検出手段と、車両の周辺情報に基づいて車両の走行状態を制御する走行制御手段とを備える。蓄電池は、正極層、電解質層および負極層の積層体を含む。走行制御手段が車両の走行状態を制御すべきときに、蓄電池に加える圧力を調整することにより、蓄電装置の放電電流の最大値を調整する。
【0014】
上記発明においては、車輪を回転させる駆動力を生じる内燃機関を更に備え、蓄電池に加える圧力を増加し、電動機に供給する電流の最大値を上昇させるとともに、電動機の出力上昇に応じて内燃機関の出力を調整することが好ましい。
【0015】
上記発明においては、蓄電装置は、蓄電池が内部に配置される密閉可能な容器を含み、圧力調整手段は、容器を密閉した状態で容器の内部に気体を供給し、蓄電池に加える圧力を調整することが好ましい。
【0016】
上記発明においては、蓄電池は、正極層、電解質層および負極層が粉体により形成されていることが好ましい。
【0017】
上記発明においては、走行制御手段は、車両の周辺情報から前方の車両が検出されない場合に、予め定められた速度範囲内になるように車両の速度を調整する定速制御を行うように形成されており、定速制御において、車両の速度が予め定められた速度範囲から逸脱した時に、圧力調整手段により蓄電池に加える圧力を増加した状態で速度を調整することができる。
【0018】
上記発明においては、電気により作動するブレーキ装置を備え、走行制御手段は、車両の周辺情報から自車両よりも遅い車両が前方に出現したことを検出した場合に、車両を減速する減速制御を行うように形成されており、減速制御において、ブレーキ装置により減速するときに、圧力調整手段により蓄電池に加える圧力を増加した状態で減速することができる。
【0019】
上記発明においては、走行制御手段は、予め定められた距離範囲内で先行車両を追従するように速度を調整する追従制御を行うように形成されており、追従制御において、先行車両との距離が予め定められた距離範囲から逸脱した時に、圧力調整手段により蓄電池に加える圧力を増加した状態で速度を調整することができる。
【0020】
上記発明においては、走行制御手段は、検出されていた先行車両が検出されなくなった場合に、予め定められた速度範囲内まで加速する加速制御を行うように形成されており、加速制御において、圧力調整手段により蓄電池に加える圧力を増加した状態で加速することができる。
【0021】
上記発明においては、走行制御手段は、予め定められた距離範囲内で先行車両を追従するように速度を調整する追従制御と、運転者が手動で追従制御を解除するとともに予め定められた速度まで加速する予備加速制御を行うように形成されており、予備加速制御において、圧力調整手段により蓄電池に加える圧力を増加した状態で加速することができる。
【発明の効果】
【0022】
本発明によれば、車両の周辺情報に応じて車両の走行状態を制御する装置を備え、車両の走行状態に応じて適切に蓄電装置の放電電流を制御する車両の駆動装置を提供することができる。
【図面の簡単な説明】
【0023】
【図1】実施の形態における車両のハイブリッド駆動装置の概略図である。
【図2】実施の形態における蓄電装置の概略部分断面図である。
【図3】実施の形態における単電池の概略斜視図である。
【図4】実施の形態における単電池の内部の概略断面図である。
【図5】実施の形態における単電池の内部の積層体の拡大概略断面図である。
【図6】実施の形態における周辺情報検出装置の機能を説明する概略図である。
【図7】実施の形態における車両の制御装置の概略図である。
【図8】実施の形態における走行制御装置による定速制御のフローチャートである。
【図9】実施の形態における走行制御装置による減速制御のフローチャートである。
【図10】実施の形態における走行制御装置による追従制御のフローチャートである。
【図11】実施の形態における走行制御装置による加速制御のフローチャートである。
【図12】実施の形態における走行制御装置による予備加速制御のフローチャートである。
【図13】実施の形態における他の蓄電装置の概略部分断面図である。
【発明を実施するための形態】
【0024】
図1から図13を参照して、実施の形態における車両の駆動装置について説明する。本実施の形態における車両は、原動機として内燃機関および電動機を含むハイブリッド型の駆動装置を備える。
【0025】
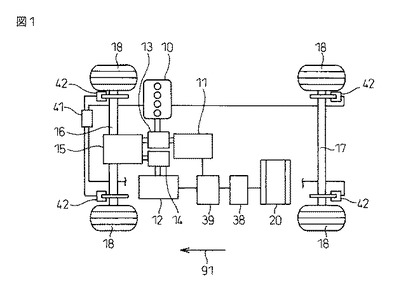
図1は、本実施の形態における車両のハイブリッド型の駆動装置の概略図である。矢印91に示す方向が車両の前方である。本実施の形態における車両の駆動装置は、車輪18に駆動力を供給する内燃機関としてのエンジン10を備える。エンジン10は、動力分割装置13および減速機15を介して、前側の車輪18の車軸16に駆動力を伝達する。車両の駆動装置は、車輪18に駆動力を供給する電動機12を備える。電動機12は、モータ減速機14および減速機15を介して、車軸16に駆動力を伝達する。
【0026】
車両の駆動装置は、電動機12に電気を供給するための蓄電装置20を備える。本実施の形態における蓄電装置20は、リチウムイオン蓄電池を含む。蓄電装置20は、昇圧コンバータ38およびインバータ39を介して電動機12に電気的に接続されている。電動機12に電気を供給する場合には、昇圧コンバータ38により直流の電気を昇圧する。昇圧した電気は、インバータ39により直流から3相交流に変換される。変換された交流の電気が電動機12に供給される。
【0027】
本実施の形態における車両の駆動装置は、動力分割装置13および電動機11を備える。動力分割装置13は、エンジン10から出力される駆動力を減速機15および電動機11に分配できるように形成されている。電動機11は、エンジン10の駆動力を受けて発電機として機能する。電動機11において生成された電気は、インバータ39に供給される。蓄電装置20の充電時には、インバータ39において交流から直流に電気が変換され、昇圧コンバータ38により降圧されて、蓄電装置20に電気が供給される。
【0028】
例えば、車両が停止している時に蓄電装置20の充電を行う場合には、エンジン10の駆動力が電動機11に伝達され、電動機11からインバータ39および昇圧コンバータ38を介して蓄電装置20に電気に供給される。また、車両が一定の速度にて走行している時や加速する時には、エンジン10の駆動力が動力分割装置13により2系統に分割される。一方の駆動力は、減速機15を介して車輪18に伝達され、他方の駆動力は、電動機11に伝達される。電動機11において生成された電気により電動機12を駆動する。更に加速時には蓄電装置20から電動機12に電気が供給される。エンジン10の駆動力に、電動機12の駆動力が加わることにより低燃費化を図ることができる。また、車両の減速時には、車輪の回転力を電動機12に伝達して発電される回生ブレーキが用いられる。回生ブレーキにより生じた電気は、インバータ39および昇圧コンバータ38を介して、蓄電装置20に供給されて充電される。
【0029】
図1には、本実施の形態における車両のブレーキ装置の一部が記載されている。本実施の形態における車両のブレーキ装置は、車軸16,17に取り付けられたディスクをブレーキパッドが押圧して車両を制動する。本実施の形態におけるブレーキ装置は、ブレーキパッドを駆動するパッド駆動装置42を含む。パッド駆動装置42は、ブレーキアクチュエータ41により制御油の油圧が供給される。本実施の形態におけるブレーキアクチュエータ41は、電気により駆動される。さらに、ブレーキ装置は、制御油を加圧する油圧ポンプを含み、油圧ポンプも電気により駆動されている。
【0030】
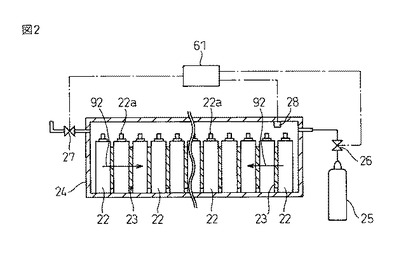
図2に、本実施の形態における蓄電装置の概略部分断面図を示す。本実施の形態における蓄電装置は、蓄電池としての単電池22を含む。本実施の形態においては、複数の単電池22が並んで配置されて組電池が構成されている。単電池22同士の間には、スペーサ23が配置されている。本実施の形態におけるスペーサ23は、板状に形成されている。本実施の形態における蓄電装置20は、組電池が内部に配置される容器としての密閉容器24を含む。密閉容器24は、内部の空間が密閉可能に形成されている。
【0031】
本実施の形態における車両の駆動装置は、単電池22に圧力を加えることができるように形成されている圧力調整手段としての圧力調整装置を備える。圧力調整装置は、単電池22に加える圧力が調整可能に形成されている。本実施の形態における圧力調整装置は、密閉容器24の内部の圧力を調整可能に形成されている。圧力調整装置は、密閉容器24の内部に気体を供給するガスタンク25を含む。本実施の形態においては、不活性気体がガスタンク25の内部に加圧されて充填されている。ガスタンク25は、密閉容器24の内部に配置されていても構わない。
【0032】
圧力調整装置は、密閉容器24の内部に供給する気圧を調整する圧力調整弁26を含む。圧力調整弁26は、ガスタンク25から密閉容器24の内部に気体を供給する流路の途中に配置されている。ガスタンク25から気体を供給することにより密閉容器24の内部を加圧することができる。また、本実施の形態における圧力調整装置は、密閉容器24の内部の圧力を下げるための開放弁27を有する。開放弁27は、大気中に気体を放出する流路の途中に配置されている。
【0033】
密閉容器24には、密閉容器24の内部の気圧を検出するための圧力センサ28が取り付けられている。圧力センサ28の出力は、後述する動力調整電子制御ユニット61に送信される。また、圧力調整弁26および開放弁27等の圧力調整装置に含まれる機器は、動力調整電子制御ユニット61に制御されている。
【0034】
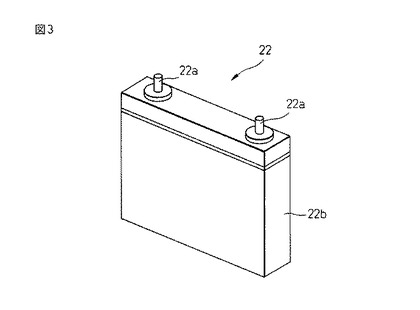
図3に、本実施の形態における蓄電池としての単電池の概略斜視図を示す。本実施の形態における単電池22は、直方体状に形成されている。単電池22は、放電したり充電したりするための端子22aを有する。本実施の形態における端子22aは、一方が正極であり、他方が負極である。本実施の形態における単電池22は、ケース22bを有する。本実施の形態における単電池22のケース22bは、外部から圧力が加わることにより変形可能な材質で形成されている。ケース22bは、例えば、ラミネートフィルム等の薄い樹脂で形成することできる。ケース22bとしては、この形態に限られず、外部から圧力が加わったときに変形可能であれば構わない。また、本実施の形態における単電池は直方体であるが、この形態に限られず、任意の形状を採用することができる。
【0035】
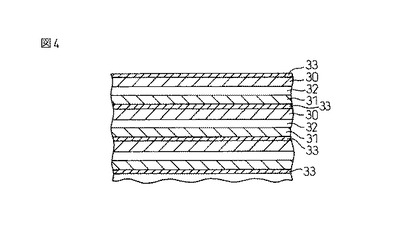
図4に、本実施の形態における単電池の内部の概略断面図を示す。本実施の形態における単電池22は、正極層30と、負極層31と、正極層30および負極層31の間に介在する電解質層32とを有する。正極層30、負極層31および電解質層32の積層体が集電体33を介して積層されている。図4に示す積層体は、例えば、絶縁体を介して単電池22のケース22bの内部に配置される。所定の位置の集電体33が端子22aに接続される。
【0036】
蓄電池としては、この形態に限られず、正極層、負極層および電解質層の積層体を含んでいれば構わない。たとえば、正極層、負極層および電解質層の積層体が帯状に形成され、この帯状の積層体が巻回されたものがケースの内部に配置されていても構わない。
【0037】
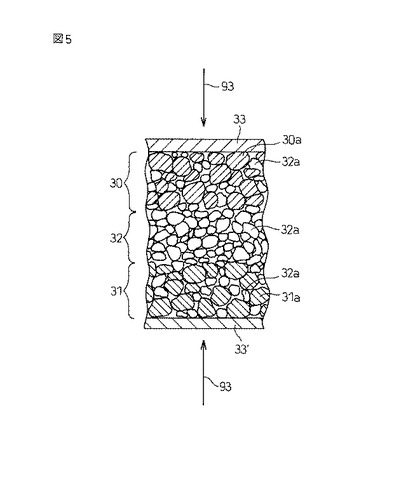
図5に、本実施の形態における正極層、負極層および電解質層の部分の拡大概略断面図を示す。本実施の形態における蓄電池は、全固体型である。本実施の形態における正極層30、負極層31および電解質層32は、それぞれが粉体により形成されている。
【0038】
正極層30は、粒子状の正極活物質30aを有する。正極活物質30aとしては、全固体電池に採用可能な任意の物質を採用することができる。正極活物質30aとしては、例えば、LiCoO2またはLiNiO2などのリチウムおよび遷移金属の層状複合酸化物の粉末、LiMn2O4などのスピネル型の粉末、またはLiFePO4などのオリビン型の粉末等を用いることができる。負極層31は、粒子状の負極活物質31aを有する。負極活物質としては、全固体電池に採用可能な任意の物質を採用することができる。負極活物質としては、例えば、In粉末、Al粉末などの金属系の活物質や、メソカーボンマイクロビーズ粉末などの炭素系の活物質を用いることができる。
【0039】
電解質層32は、イオン導電性を有する粒子状の固体電解質32aを有する。固体電解質としては、全固体電池に採用可能な任意の物質を採用することができる。固体電解質としては、たとえば、硫化物系の固体電解質または酸化物系の固体電解質等を用いることができる。硫化物系の固体電解質としては、Li2S−P2S5粉末、70Li2S−30P2S5粉末、またはLi2S−SiS2粉末等を用いるができる。酸化物系の固体電解質としては、Li2S−P2O5粉末等を用いることができる。
【0040】
本実施の形態における蓄電池は、正極層30の内部および負極層31の内部にも固体電解質32aが配置されている。この構成により、正極層または負極層におけるイオン導電性の向上を図ることができる。正極層および負極層は、この形態に限られず、固体電解質が配置されてなくても構わない。
【0041】
正極層30および負極層31の外側には、集電するための集電体33が配置されている。本実施の形態における集電体33は、金属箔により形成されている。集電体としては、例えば、アルミニウム、ステンレス、または銅などの材質を用いることができる。
【0042】
本実施の形態における正極層、負極層および電解質層は、材料となる粉末をプレス機により圧縮することにより形成することができる。たとえば、固体電解質の製造方法としては、固体電解質の材質の材料を遊星ミル装置等の粉砕機で粉砕した後に、プレス機で圧粉することにより製造することができる。圧粉する工程においては、正極層、負極層および電解質層を個別に圧縮することができる。または、複数の層の材料となる粉末を順にプレス機に投入し、一度に圧粉を行なっても構わない。
【0043】
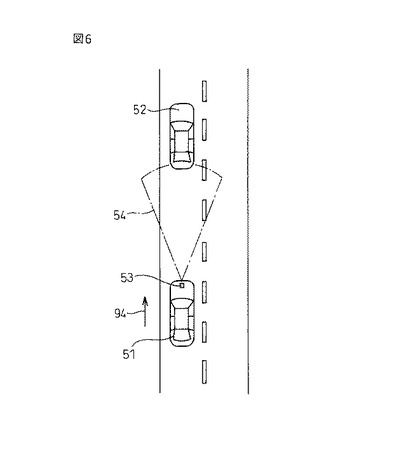
図6に、本実施の形態における車両の周辺情報を検出する周辺情報検出装置を説明する概略図を示す。図6においては、一つの車線に自車両51および自車両51の前に先行車両52が走行している状態を示している。自車両51および先行車両52は、矢印94に示す方向に走行している。
【0044】
本実施の形態における自車両51には、車両の周辺情報を検出する周辺情報検出手段として、周辺情報検出装置が取り付けられている。本実施の形態における周辺情報検出装置は、車両51の前方に向かって電波を発振するレーダセンサ53を備える。本実施の形態におけるレーダセンサ53は、ミリ波を発振する。また、レーダセンサ53は、レーダ認知範囲54に先行車両52等の対象物が存在した場合に、対象物等に反射して戻る電波を受信する。
【0045】
レーダセンサ53は、受信した電波の周波数の変化や電子スキャンなどにより、自車両51が走行している車線上の先行車両52の有無を判別することができる。また、先行車両52との距離や相対速度等を演算することができる。レーダセンサ53の出力は、後述する運転支援電子制御ユニットに送信される。周辺情報検出装置としては、この形態に限られず、車両の周辺の情報を検出できる任意の装置を採用することができる。
【0046】
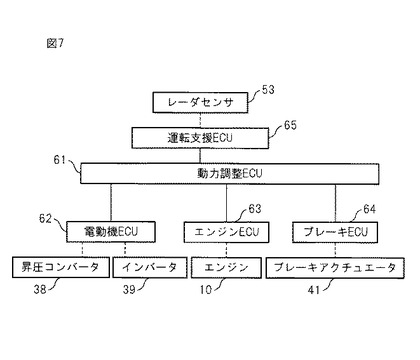
図7に、本実施の形態における車両の制御装置の概略図を示す。それぞれの電子制御ユニット(ECU:Electronic Control Unit)は、例えばCAN(Controller Area Network)通信などにより、互いの通信を行なっている。
【0047】
図1および図7を参照して、電動機電子制御ユニット62は、昇圧コンバータ38およびインバータ39を制御する。電動機12に供給される電流は、電動機電子制御ユニット62により制御される。エンジン電子制御ユニット63は、エンジン10を制御する。例えば、エンジン電子制御ユニット63は、エンジン10のスロットル弁の開度や点火時期などを制御する。ブレーキ電子制御ユニット64は、ブレーキ装置を制御する。例えば、ブレーキ装置の油圧ポンプやブレーキアクチュエータ41を制御する。
【0048】
本実施の形態における動力調整電子制御ユニット61は、アクセルペダルの踏み込み量等のセンサの出力および他の電子制御ユニットの出力等に基づいて、運転状態に応じたエンジン10の出力および電動機12の出力を算出する。算出されたそれぞれの要求出力は、電動機電子制御ユニット62およびエンジン電子制御ユニット63に送信される。送信された要求出力に基づいて、電動機12に供給する電流やエンジン10のスロットル弁の開度等が定められる。また、動力調整電子制御ユニット61は、蓄電装置20の蓄電量、電流、電圧および温度等の蓄電装置の状態を監視する。
【0049】
本実施の形態における車両は、周辺情報検出装置により検出された周辺情報に基づいて、車両の走行状態を制御し、運転者の運転を支援する走行制御装置を備える。本実施の形態における走行制御装置は、運転支援電子制御ユニット65を含む。運転支援電子制御ユニット65は、レーダセンサ53の出力等を受信し、受信した周辺情報に基づいて要求出力等を算出する。算出した要求出力等は動力調整電子制御ユニット61に送信される。また、運転支援電子制御ユニット65は、ブレーキ装置による制動が必要であると判別する場合には、ブレーキ電子制御ユニット64に要求される制動力を送信する。ブレーキ電子制御ユニット64は、要求される制動力に基づいてブレーキ装置を制御する。
【0050】
本実施の形態における走行制御装置は、車両の周辺情報から先行車両が検出されない場合に、予め定められた速度範囲内になるように車両の速度を調整する定速制御を行なう。定速制御では、先行車両が存在しないときに、ほぼ一定の速度で走行するように制御される。予め定められた速度範囲は、たとえば、運転者がハンドル等に配置されたボタン等により希望速度を選択し、選択された希望速度に対して所定の速度幅を考慮した範囲を定めることができる。
【0051】
また、本実施の形態における走行制御装置は、先行車両を検出してない状態から検出した状態になった場合には減速制御を行う。減速制御では、自車両よりも速度の遅い車両が前方に出現したことを検出した場合に、自車両を減速する制御を行う。例えば、遠方を走行していた先行車両が近づいてきたとき、または、他の車線を走行していた車両が自車両の走行している車線に車線変更して先行車両になった場合等には減速制御を行う。
【0052】
また、本実施の形態における走行制御装置は、減速制御を行って自車両の速度が先行車両の速度とほぼ同じになった場合には、先行車両を追従する追従制御を行う。追従制御では、予め定められた距離範囲内にて先行車両を追従するように自車両の速度を調整する。先行車両との車間距離は、例えば自車両の速度に応じて予め定められている。例えば、追従制御を行うときの車間距離は、自車両の速度に比例した距離を採用することができる。予め定められた距離範囲は、選定された車間距離に対して所定の距離幅を考慮した範囲を定めることができる。
【0053】
本実施の形態における走行制御装置は、追従制御を行っているときに、既に検出されていた先行車両が検出されなくなった場合には、予め定められた速度範囲内まで加速する加速制御を行う。たとえば、先行車両が車線変更を行なったり、自車両が車線変更を行なったりして、前方を走行する車両が無くなった場合には、自車両の速度を予め定められた速度範囲内まで加速する。予め定められた速度範囲としては、例えば、定速制御における速度範囲を採用することができる。また、加速制御を行って、自車両の速度が予め定められた速度範囲内になった場合には、定速制御を行なうことができる。
【0054】
ところで、本実施の形態における走行制御装置による制御には、車両を加速する制御が含まれる。本実施の形態における走行制御装置は、内燃機関の出力に加えて電動機の出力を用いて加速するように制御する。走行制御装置によりを走行している期間中において、車両が加速をすべきときには、蓄電池に加える圧力を上昇させる制御を行う。
【0055】
図2を参照して、圧力調整装置は、蓄電装置20の密閉容器24の内部の気圧を上昇させる。蓄電装置20の内部の気圧を上昇させる制御においては、圧力調整弁26を開いて、ガスタンク25の内部に溜められている気体を密閉容器24の内部に供給する。密閉容器24の内部の気圧が上昇するために、単電池22に加わる圧力を大きくすることができる。密閉容器24の内部を加圧する前の蓄電装置20の通常運転時の圧力(通常圧力)としては、例えば大気圧を例示することができる。
【0056】
本実施の形態における圧力調整装置は、通常運転時の圧力から予め定められた加速用設定圧力まで密閉容器24の内部の圧力を上昇させる。密閉容器24の内部の圧力は、圧力センサ28により検出することができる。
【0057】
密閉容器24の内部の圧力が上昇することにより、単電池22に加わる圧力が増加する。例えば、矢印92に示すように、単電池22に対して圧力が作用する。図5を参照して、単電池の内部の正極層30、負極層31および電解質層32の積層体には、例えば矢印93に示すように圧縮される向きに力が加わる。本実施の形態における蓄電池は、正極層30、負極層31および電解質層32が粒子状物質を含む粉体により形成されている。それぞれの層の粒子同士の間には隙間が形成されているが、積層体に圧力が加わることによって隙間が少なくなったり、粒子同士の接触面積が大きくなったりするために、単電池22の内部抵抗が小さくなる。単電池22の内部抵抗が小さくなるために、蓄電装置20は大きな電流を出力することができる。蓄電装置が放電可能な電流の最大値を、蓄電装置の内部を加圧する前の電流の最大値よりも大きくすることができる。
【0058】
本実施の形態においては、蓄電装置20の内部の圧力を上昇させるとともに、動力調整電子制御ユニット61が、蓄電装置20の放電電流の最大値を上昇する。すなわち、蓄電装置20の放電電流の許容値を大きくする。また、電動機12の要求出力の上限値を大きくする。本実施の形態における動力調整電子制御ユニット61は、車両を加速する場合に、蓄電装置20の内部を加圧しないときの出力よりも大きな出力を電動機12に対して要求する。電動機電子制御ユニット62は、要求出力に応じて蓄電装置20の内部を加圧しないときの電流よりも大きな電流を電動機12に供給するように制御する。
【0059】
本実施の形態における車両は、加速する場合に蓄電池に加える圧力を増加することにより、エンジン10に対する電動機12の負荷割合を大きくすることができる。この結果、エンジン10の負荷を減らすことができて、燃料の消費量を低減することができる。更に、本実施の形態においては、電動機12の負荷割合を増加することができるために、時間遅れを抑制することができる。すなわち、加速時の応答性を向上させることができる。
【0060】
また、本実施の形態においては、車両の減速を行なうときにも、蓄電池に加える圧力を上昇させる制御を行う。特に、ブレーキ装置により車両を制動するときに、蓄電池に加える圧力を高くすることが好ましい。この制御を行なうことによって、蓄電装置から供給される最大電流を増加させることができる。このため、ブレーキ装置に含まれる油圧ポンプやブレーキアクチュエータ等を駆動する電気を十分に供給することができ、他の空調装置等の補機への電力供給を低減したり遮断したりすることを抑制できる。また、ブレーキ装置への供給電力を増加させることにより、ブレーキ装置による制動力を増加させることができて、安全性の向上を支援することができる。
【0061】
図2を参照して、本実施の形態においては、車両の減速時にも車両の加速時と同様に蓄電装置20の密閉容器24の内部の気圧を上昇させる制御を行う。本実施の形態における圧力調整装置は、通常運転時の圧力から予め定められた減速用設定圧力まで、密閉容器24の内部の圧力を上昇させる。車両を加速する場合の加速用設定圧力と車両を減速する場合の減速用設定圧力とは、互いに同じ圧力でも異なる圧力でも構わない。例えば、加速するときの加速用設定圧力が減速するときの減速用設定圧力よりも大きくなるように定めても構わない。
【0062】
このように、本実施の形態においては走行制御装置による制御を行う期間中に、車両の加速または減速を行うべきときに蓄電池に加える圧力を増加させる制御を行う。車両の加速または減速が終了したら、蓄電池に加える圧力を減少させて通常運転時の元の圧力に戻す制御を行うことができる。図2を参照して、圧力調整装置は、蓄電装置の内部の圧力を通常運転時の圧力に戻す場合には、開放弁27を開いて内部の気体を大気中に放出することにより蓄電装置の内部の圧力を下げることができる。
【0063】
次に、本実施の形態の走行制御装置による定速制御、減速制御、追従制御および加速制御のそれぞれについて具体例を取り上げて説明する。
【0064】
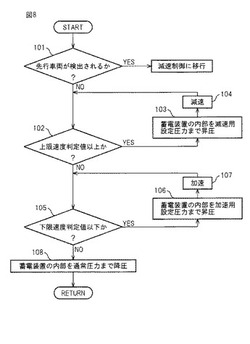
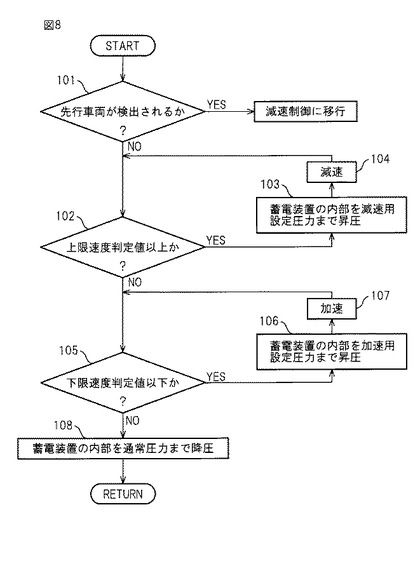
図8は、本実施の形態における走行制御装置による定速制御のフローチャートである。本実施の形態においては、運転者が走行制御装置を始動した場合に定速制御から開始される。図8に示す定速制御は、例えば、予め定められた時間間隔ごとに繰り返して行なうことができる。
【0065】
始めにステップ101においては、周辺情報検出装置により先行車両が検出されるか否かを判別する。ステップ101において、先行車両が検出される場合には後述する減速制御に移行する。ステップ101において、先行車両が検出されない場合には、ステップ102に移行する。
【0066】
ステップ102においては、車両の速度が予め定められた速度範囲の上限速度判定値以上か否かを判別する。ステップ102において、車両の速度が予め定められた速度範囲の上限速度判定値以上であれば、ステップ103に移行する。
【0067】
ステップ103においては、蓄電装置の内部の気圧を減速用設定圧力まで上昇する。この制御を行なうことにより、蓄電装置から放電可能な最大電流を大きくすることができる。動力調整電子制御ユニットは、蓄電装置の放電電流の最大値を上昇させる制御を行う。
【0068】
次に、ステップ104においては、車両を減速する制御を行う。ステップ104の減速においては、例えば、予め定められた速度幅にて減速を行なうことができる。または、上限速度判定値を越える速度幅を算出して、この速度幅に応じて減速しても構わない。ステップ104においては、エンジンのスロットル弁を閉じる制御を行うことができる。または、電動機に供給する電力を減少させる制御を行うことができる。更に、エンジンの出力や電動機の出力の制御では不十分の場合には、回生ブレーキやブレーキ装置を駆動して車両の減速を行っても構わない。ブレーキ装置を駆動する場合においても、蓄電池に圧力を加えているために、ブレーキ装置に加えて空調装置等に必要な電力を確保することができる。ステップ102において、車両の速度が上限速度判定値未満の場合には、ステップ105に移行する。
【0069】
ステップ105においては、車両の速度が予め定められた速度範囲の下限速度判定値以下であるか否かを判別する。ステップ105において、車両の速度が下限速度判定値以下である場合には、ステップ106に移行する。
【0070】
ステップ106においては、蓄電装置の内部の気圧を加速用設定圧力まで上昇する。この制御を行なうことにより、蓄電装置から放電可能な最大電流を大きくすることができる。動力調整電子制御ユニットは、電動機の出力の最大値および蓄電装置の放電電流の最大値を上昇させる制御を行う。
【0071】
次に、ステップ107においては、車両を加速する制御を行う。ステップ107の加速においては、例えば、予め定められた速度幅にて加速することができる。または、下限速度判定値を下回る速度幅を算出し、この速度幅に応じて加速しても構わない。本実施の形態においては、通常運転時における蓄電装置の最大電流よりも大きな電流を電動機に供給することができる。電動機の負荷割合を大きくすることができるために応答性が向上する。また、内燃機関にて消費される燃料の量を少なくすることができる。ステップ105において、車両の速度が下限速度判定値よりも大きい場合には、ステップ108に移行する。この場合には、自車両の速度が予め定められた速度判定範囲内である。
【0072】
ステップ108においては、蓄電装置の内部の気圧を通常運転時の圧力まで低下させる制御を行う。本実施の形態においては蓄電装置の内部の気圧を元の圧力まで戻している。
【0073】
このように、定速制御においては加速および減速を行うときに、蓄電池に加える圧力を高くして、蓄電装置の放電電流の最大値を大きくすることができる。電動機、ブレーキ装置、または補機等に供給する電力を大きくすることができる。
【0074】
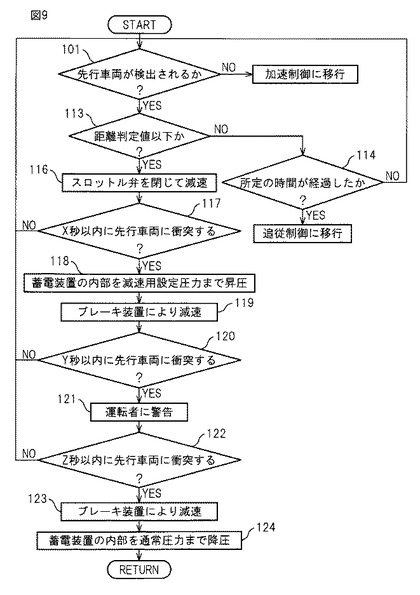
図9に、本実施の形態における走行制御装置による減速制御のフローチャートを示す。本実施の形態における減速制御は、自車両の前に先行車両が出現した場合に行なうことができる。周辺情報検出装置が先行車両を検出していない状態から、先行車両を検出した状態に変化した時に行うことができる。図9に示す減速制御は、例えば予め定められた時間間隔ごとに繰り返し行なうことができる。
【0075】
始めにステップ101においては、先行車両が検出されるか否かを検出する。先行車両が検出されない場合には、減速制御を繰り返し行っている期間中に先行車両が車線変更等により存在しなくなった場合等である。この場合には、加速制御に移行する。ステップ101において、先行車両が検出される場合にはステップ113に移行する。
【0076】
ステップ113においては、周辺情報検出装置により先行車両と自車両との距離を検出し、先行車両と自車両との距離が予め定められた距離判定値以下であるか否かが判別される。ステップ113においては、自車両と先行車両との距離が、減速が必要である程度に近いか否かを判別する。ステップ113において、先行車両と自車両との距離が予め定められた距離判定値よりも大きければ、ステップ114に移行する。
【0077】
ステップ114においては、減速制御を開始してから予め定められた時間を経過したか否かを判別する。すなわち、ステップ101およびステップ113を繰り返し行なっている時間が所定の時間を越えたか否かを判別する。ステップ114において、所定の時間が経過していない場合には、ステップ101に戻る。例えば、減速制御を開始したときに、先行車両と自車両との距離が十分長い場合であっても、先行車両の速度が自車両に比べて非常に遅い場合には、急激に自車両と先行車両との距離が縮まるために制動が必要になる。ステップ114を行うことにより、先行車両と自車両との距離が距離判定値以下か否かの判別を繰り返すことができて、減速の要否を所定の時間の間繰り返すことができる。
【0078】
ステップ114において、減速制御を開始してから所定の時間が経過している場合には追従制御に移行する。ステップ113において、自車両と先行車両との距離が予め定められた距離判定値以下である場合には、ステップ116に移行する。この場合には、車両の減速が必要であると判別する。
【0079】
ステップ116においては、エンジンの制御を行なう。本実施の形態においては、エンジンのスロットル弁の開度を小さくする。また、エンジンにおいて燃焼室への燃料の供給を減少させることにより減速する。さらに、電動機を駆動している場合には、電動機に供給する電力量を小さくする制御を行っても構わない。更に、回生ブレーキを併用しても構わない。
【0080】
次に、ステップ117においては、予め定められた第1時間以内に、先行車両に衝突するか否かを判別する。本実施の形態においては、自車両がX秒以内に先行車両に衝突するか否かを判別する。所定の時間内に先行車両に衝突するか否かは、例えば、自車両と先行車両との速度差および自車両と先行車両との距離に基づいて判別することができる。
【0081】
ステップ117において、X秒以内に先行車両に衝突しないと判別される場合には、ステップ101に戻る。ステップ117において、X秒以内に先行車両に衝突すると判別される場合には、ステップ118に移行する。
【0082】
ステップ118においては、蓄電装置の内部の気圧を減速用設定圧力まで上昇する。本実施の形態においては、蓄電装置の密閉容器の内部の圧力を上昇させる。次に、ステップ119においては、ブレーキ装置により減速する。蓄電装置の放電電流の最大値を上昇させた状態で、ブレーキ装置により減速することができる。
【0083】
次に、ステップ120においては、予め定められた第2時間以内に、先行車両に衝突するか否かを判別する。本実施の形態においては、自車両がY秒以内に先行車両に衝突するか否かを判別する。ステップ120において、Y秒以内に先行車両に衝突しないと判別される場合には、ステップ101に戻る。ステップ120において、Y秒以内に先行車両に衝突すると判別される場合には、ステップ121に移行する。
【0084】
ステップ121においては、運転者に警告を行う。本実施の形態においては、運転席の前に配置されている運転状態を表示するインストルメントパネルに警告灯を点灯させ、さらに、警告音により先行車両が近づいていることを運転者に警告する。
【0085】
次に、ステップ122においては、予め定められた第3時間以内に、先行車両に衝突するか否かを判別する。本実施の形態においては、自車両がZ秒以内に先行車両に衝突するか否かを判別する。ステップ122において、Z秒以内に先行車両に衝突しないと判別される場合には、ステップ101に戻る。Z秒以内に先行車両に衝突すると判別される場合には、ステップ123に移行する。ステップ117、ステップ120およびステップ122において、それぞれの判定時間は、X秒が最も長く、Y秒およびZ秒の順に徐々に短くなっている。ステップ122において、Z秒以内に先行車両に衝突すると判別される場合には、先行車両が接近している状態である。
【0086】
ステップ123においては、ブレーキ装置により減速する。この場合に、ステップ118と同様に、再度、蓄電装置の内部の気圧を上昇させて減速を行っても構わない。ステップ123における減速の後にステップ124に移行する。
【0087】
ステップ124においては、蓄電装置の内部の気圧を通常運転時の圧力まで低下させる。
【0088】
このように、減速制御においては減速するときに、蓄電池に加える圧力を高くして、蓄電装置の放電電流の最大値を大きくすることができる。ブレーキ装置に加えて空調装置等に供給する電力を確保することができる。
【0089】
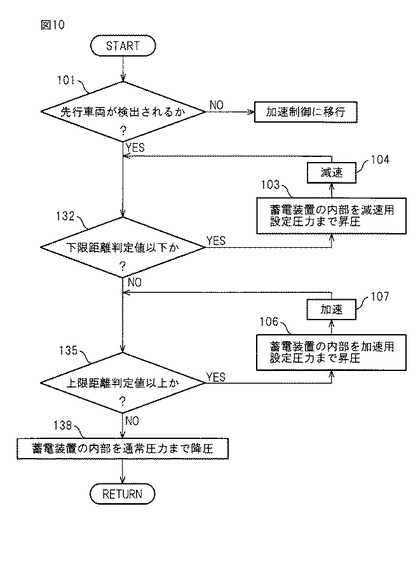
図10に、本実施の形態における走行制御装置による追従制御のフローチャートを示す。追従制御は、先行車両が検出されている期間に行うことができる。図10に示す追従制御は、例えば予め定められた時間間隔ごとに繰り返して行なうことができる。
【0090】
始めに、ステップ101において、先行車両が検出されているか否かを判別する。先行車両が検出されない場合には、先行車両が車線変更をしたり自車両が車線変更を行ったりして、先行車両が存在しなくなった場合である。この場合には、加速制御に移行する。ステップ101において、先行車両が検出される場合にはステップ132に移行する。
【0091】
ステップ132においては、自車両と先行車両との距離が、予め定められた距離範囲の下限距離判定値以下であるか否かを判別する。すなわち、自車両が先行車両に近づいているか否かを判別する。ステップ132において、先行車両との距離が下限距離判定値以下の場合には、ステップ103およびステップ104に移行する。ステップ103においては、蓄電装置の内部の気圧を減速用設定圧力まで上昇させる。次に、ステップ104においては減速する。本実施の形態における減速の制御は、前述の定速制御の減速と同様の制御を採用している。または、前述の減速制御と同様の制御を採用しても構わない。
【0092】
ステップ132において、先行車両と自車両との距離が、下限距離判定値よりも大きい場合には、ステップ135に移行する。ステップ135においては、自車両と先行車両との距離が、予め定められた上限距離判定値以上か否かが判別される。すなわち、自車両が先行車両と離れすぎていないかが判別される。ステップ135において、先行車両と自車両の距離が上限距離判定値以上の場合には、ステップ106およびステップ107に移行する。ステップ106においては、蓄電装置の内部の気圧を加速用設定圧力まで上昇し、蓄電装置の放電電流の最大値を上昇させる。ステップ107においては、加速する。
【0093】
次に、ステップ135において、先行車両と自車両との距離が上限距離判定値未満であると判別される場合には、ステップ138に移行する。この場合には、先行車両と自車両との距離が、予め定められた距離範囲内である。
【0094】
ステップ138においては、蓄電装置の内部の気圧を通常運転時の圧力まで低下させる。蓄電装置の内部の気圧が通常運転時の圧力である場合には、この圧力を維持する。
【0095】
このように、追従制御においては、加速または減速を行うときに、蓄電池に加える圧力を高くして、蓄電装置の放電電流の最大値を大きくすることができる。電動機、ブレーキ装置、または空調装置等に供給する電力を大きくすることができる。
【0096】
本実施の形態においては、追従制御を行っているときに先行車両が存在しなくなった場合には、加速制御に移行しているが、この形態に限られず、定速制御に移行しても構わない。
【0097】
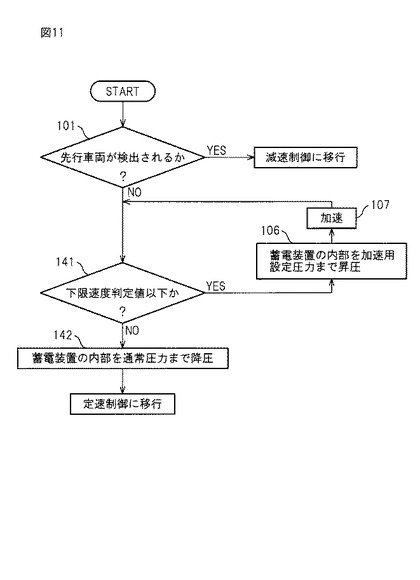
図11に、本実施の形態における走行制御装置による加速制御のフローチャートを示す。加速制御は、先行車両が存在する状態から存在しない状態に移行した場合に行うことができる。
【0098】
始めに、ステップ101においては、先行車両が検出されているか否かを判別する。ステップ101において、先行車両が検出される場合には、減速制御に移行する。ステップ101において、先行車両が検出されない場合には、ステップ141に移行する。
【0099】
ステップ141においては、自車両の速度が、予め定められた速度範囲の下限速度判定値以下であるか否かを判別する。ステップ141において、自車両の速度が下限速度判定値以下の場合には、ステップ106およびステップ107に移行して、蓄電装置の内部の圧力を加速用設定圧力まで上昇し、車両を加速する制御を行う。ステップ141において、自車両の速度が下限速度判定値よりも大きい場合には、ステップ142に移行する。
【0100】
ステップ142においては、蓄電装置の内部の気圧を通常運転時の圧力まで低下させる。蓄電装置の内部の気圧が既に通常運転時の圧力である場合には、この圧力を維持する。ステップ142が完了したら定速制御に移行する。
【0101】
このように、加速制御においては、加速を行うべきときに蓄電池に加える圧力を高くして、蓄電装置の放電電流の最大値を大きくして、電動機に供給する電力を大きくすることができる。
【0102】
ところで、加速制御は、例えば先行車両の追い越しをするために車線変更をした場合に行なわれる。ところが、先行車両の追い越しを行う場合には、車線を変更してから加速するのではなく、車線変更をしながら加速すると、追い越し時間が短くなり好ましい。また、一般的に、走行車線を走行する車両よりも追い越し車線を走行する車両の方が高速であり、追い越し車線を走行する車両との車間距離を保つためにも、加速しながら追い越し車線に車線変更することが好ましい。
【0103】
本実施の形態における走行制御装置は、運転者が手動操作することにより追従制御を解除すると共に、予め定められた速度範囲内まで加速する予備加速制御を行うように形成されている。
【0104】
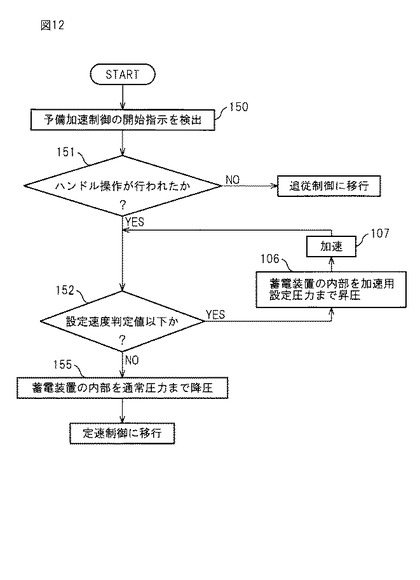
図12に、本実施の形態における予備加速制御のフローチャートを示す。始めにステップ150において、運転者による予備加速制御の指示を検出する。例えば、ハンドル等に配置されている予備加速制御用の開始ボタンを運転者が押したことを検出する。
【0105】
ステップ151においては、運転者による車線変更の操作が行なわれたか否かを判別する。本実施の形態においては、ハンドル操作が行なわれたか否かを判別する。車線変更の操作としては、この形態に限られず、例えば、方向指示器により指示を出す操作を検出しても構わない。ステップ151において、ハンドル操作が行なわれていない場合には、引き続き現在の車線を走行すると判別することができる。この場合には、追従制御に移行する。ステップ151において、ハンドル操作が行なわれている場合には、車線変更を行うと判別することができる。この場合には、ステップ152に移行する。
【0106】
ステップ152においては、自車両の速度が、予め定められた設定速度判定値以下であるか否かを判別する。この速度としては、定速制御の速度範囲の下限速度判定値を採用することができる。または、定速制御の下限速度判定値と異なる速度を採用しても構わない。たとえば、自車両の現在の速度に予め定められた速度増加分を加算した速度を採用しても構わない。
【0107】
ステップ152において、自車両の速度が、予め定められた設定速度判定値以下である場合には、ステップ106およびステップ107に移行する。ステップ106においては、蓄電装置の内部の気圧を加速用設定圧力まで加圧し、さらに、ステップ107においては加速する制御を行う。ステップ152において、自車両の速度が設定速度判定値よりも大きい場合には、ステップ155に移行する。
【0108】
ステップ155においては、蓄電装置の内部の気圧を通常運転時の圧力まで低下させる制御を行う。蓄電装置の内部の気圧が、既に通常運転時の圧力である場合には、この圧力を維持する。ステップ155が終了したら定速制御に移行する。
【0109】
この様に、予備加速制御において加速する場合にも、蓄電池に加える圧力を高くして、蓄電装置の放電電流の最大値を大きくする制御を行うことができる。
【0110】
図2を参照して、本実施の形態の圧力調整装置は、内部に単電池22が配置された密閉容器24を密閉した状態で、密閉容器24の内部に気体を供給し、単電池22に加える圧力を調整している。この構成を採用することにより、蓄電池に加える圧力調整を短時間で行うことができる。たとえば、機械ばね等により圧力を調整する圧力調整装置と比較した場合に、圧力変更を速くすることができ、圧力調整の応答性が向上する。
【0111】
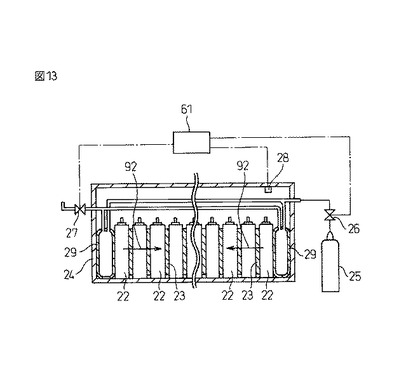
図13に、本実施の形態における他の圧力調整装置を説明する蓄電装置の概略部分断面図を示す。他の圧力調整装置は、複数の単電池22を含む組電池の両側の側面に配置されている加圧部材29を含む。加圧部材29は、内部空間を有し、伸縮可能に形成されている。加圧部材29は、内部の圧力が上昇することにより、大きくなるように形成されている。加圧部材29は、圧力調整弁26を介してガスタンク25に接続されている。また、加圧部材29は、開放弁27が開くことにより、内部の圧力を低下させることができるように形成されている。本実施の形態における加圧部材29は、組電池を挟み込むように、組電池の長手方向の両側に配置されている。
【0112】
他の圧力調整装置において、単電池22に加える圧力を増加する場合には、圧力調整弁26を開く制御を行うことにより、加圧部材29の内部の圧力を上昇させる。加圧部材29が組電池を押圧し、矢印92に示すように、組電池に含まれる単電池22に加える圧力を上昇させることができる。
【0113】
本実施の形態における圧力調整装置は、気体により蓄電池を加圧するように形成されているが、この形態に限られず、任意の構造により蓄電池を加圧することができる。たとえば、液体などの他の流体を用いて蓄電池を加圧するように形成されていても構わない。
【0114】
本実施の形態においては、車両の周辺情報として、自車両の前を走行する先行車両を例に取り上げて説明したが、この形態に限られず、車両の周辺情報としては、走行に伴って変化する車両の周囲の任意の情報を採用することができる。例えば、車両の前方に現れる障害物や車両の前方に飛び出す人等であっても構わない。このような時に減速する場合にも、本実施の形態における減速制御のように、蓄電装置の内部の気圧を上昇させるとともに、蓄電池の最大電流を上昇させて減速時における電力を確保することができる。
【0115】
また、本実施の形態における走行制御手段は、定速制御、減速制御、追従制御、加速制御、および予備加速制御を例に取り上げて説明したが、この形態に限られず、検出した周辺情報に基づいて車両の走行状態を制御する任意の手段を採用することができる。例えば、走行制御手段は、定速制御を行っている期間中に、一時的に手動操作により加速や減速を行う制御を採用することができる。または、走行制御手段として、路面の状態等の周辺情報に応じて、前後車輪の駆動力配分を可変にし、さらに、後輪に伝達された駆動力を左右に可変に配分する配分装置を採用することができる。このような駆動力を配分する配分装置は電気により駆動することができる。この配分装置を駆動すべきときに、蓄電池に加える圧力を調整し、蓄電池の放電可能な電流を調整することができる。
【0116】
また、走行制御手段は、複数の走行モードを選択可能な制御手段を含むことができる。たとえば、通常走行モードに加えてスポーツド走行モードを備えた車両を採用することができる。スポーツ走行モードが選択された時には、同一のアクセルペダルの踏み込み量に対して通常走行モードよりも要求負荷を大きくしたり、電動パワーステアリング装置によりステアリングの応答性を高くしたり、タイヤの空転を抑制するトラクションコントロール機能を作動させたりすることができる。このような走行モードを切替える場合には、蓄電池に加えられる圧力を調整し、蓄電池の放電可能な電流を調整することにより、必要とする機能に応じた電流を供給することができる。また、走行制御手段は、電気によるモータ駆動とエンジン駆動のうち、モータ駆動のみが選択される制御手段を含むこととができる。モータ駆動のみを行う制御またはモータ駆動とエンジン駆動とを併用する制御とを切替える場合には、蓄電池に加えられる圧力を調整し、蓄電池の放電可能な電流を調整することができる。たとえば、モータ駆動のみを選択した場合には、蓄電池に加えられる圧力を増やすことで、低速走行時における出力を増加させることができる。
【0117】
本実施の形態における蓄電池は、正極層、負極層および電解質層が粒子状物質を含む粉体により形成されているが、この形態に限られず、正極層、負極層および電解質層のうち、少なくとも一つの層が粒子状物質を含む粉体により形成されていれば構わない。更には、蓄電池は、正極層、負極層および電解質層の積層体を含んでいれば構わない。この場合においても蓄電池の積層体に圧力を加えることにより、それぞれの層同士の接触抵抗を小さくすることができて、蓄電池の放電可能な電流の最大値を大きくすることができる。
【0118】
また、本実施の形態においては、内燃機関および電動機を備えるハイブリッド型の車両の駆動装置について説明を行ったが、この形態に限られず、蓄電池を備える車両の駆動装置に、本発明を提供することができる。例えば、電気自動車に本発明を適用することができる。
【0119】
上述のそれぞれの図において、同一または相当する部分には同一の符号を付している。なお、上記の実施の形態は例示であり発明を限定するものではない。また、実施の形態においては、特許請求の範囲に示される変更が含まれている。
【符号の説明】
【0120】
10 エンジン
11,12 電動機
13 動力分割装置
14 モータ減速機
15 減速機
18 車輪
20 蓄電装置
22 単電池
24 密閉容器
25 ガスタンク
26 圧力調整弁
27 開放弁
29 加圧部材
30 正極層
31 負極層
32 電界質層
41 ブレーキアクチュエータ
51 車両
53 レーダセンサ
61 動力調整電子制御ユニット
62 電動機電子制御ユニット
63 エンジン電子制御ユニット
64 ブレーキ電子制御ユニット
65 運転支援電子制御ユニット
【技術分野】
【0001】
本発明は、車両の駆動装置に関する。
【背景技術】
【0002】
電動機の出力により車輪を駆動する車両には、電動機に供給する電気を蓄えるための蓄電装置が配置される。蓄電装置には、電動機に電気を供給する放電および制動中などに発電された電気の充電が可能な二次電池が含まれる。このような二次電池には、ニッケル水素電池やリチウムイオン電池等が含まれる。
【0003】
特開平10−214638号公報には、リチウムを挿入または脱離することができる負極及び正極と、非水電解液と、これらを収納する素電池ケースとで構成された素電池を含むリチウム二次電池が開示されている。このリチウム二次電池は、複数個の素電池が組電池ケースに収納されている。素電池ケースの外で組電池ケースの内部の空間には、気体等を充填し、組電池ケース内に生じる静水圧を用いて素電池を加圧することが開示されている。このリチウム二次電池では、素電池中の電極板が同じ圧力状態で加圧されるために、サイクル特性が改善されることが開示されている。
【0004】
一方で、近年においては、車両の運転を支援する装置として、所定の距離を保ちながら前方の車両に追従する装置が知られている。プリウス新型車解説書(トヨタ自動車株式会社サービス技術部、2009年7月30日発行)には、走行車両の速度を一定に保つ機能に加え、先行車両を認識して車速に応じて適切な車間距離を保ちながら追従走行を行なう機能を備えたレーダークルーズコントロール装置が開示されている。
【0005】
また、特開2002−211270号公報には、先行車が存在するときに定車間走行を行なう装置と、先行車が存在しないときに定車速走行を行なう装置とを備えるオートクルーズ装置において、定車間走行の期間中にドライバーが手動操作手段を操作することにより、定車間走行を一時的に解除したり、セット車速を一時的に増加させたりすることが開示されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平10−214638号公報
【特許文献2】特開2002−211270号公報
【非特許文献】
【0007】
【非特許文献1】トヨタ自動車株式会社、「プリウス新型車解説書(品番NM12B0J)」、トヨタ自動車株式会社サービス技術部、2009年7月30日発行、第12章 コントロールシステム、p.12−33〜p12−52
【発明の概要】
【発明が解決しようとする課題】
【0008】
クルーズコントロール装置等の運転を支援する装置を作動することにより、車両の周辺の状況に応じて車速が調整される。原動機が内燃機関のみの場合には、内燃機関のスロットル弁の開度を制御することにより車速が調整される。従来の技術においては、内燃機関および電動機を備えるハイブリッド車両においても、クルーズコントロール装置等の運転を支援する装置を作動した場合に、車速の調整を内燃機関のスロットル弁の開度の制御で行なっている。このために、過剰な燃料を消費し、燃料消費量が多くなっている虞がある。また、内燃機関のスロットル弁の開度の制御では、負荷変動の要求から実際の出力変動までに時間遅れが生じるという課題がある。
【0009】
ところで、電動機により駆動力を得る車両では、定速での走行時や加速を行なう時には、大きな電流が蓄電池から電動機に供給される。例えば、ハイブリッド車両においては、車両を加速するときに内燃機関および電動機が駆動され、電動機には大きな電流が供給される。ところが、蓄電池は、内部抵抗により所定の電流以上で放電を行なうことが困難であるという特性を有する。蓄電池には放電を行うときの電流の最大値が定められ、蓄電装置は、放電時の電流の最大値未満になるように制御される。このために、運転を支援する装置が加速等を行なう場合においても、大きな電流を電動機に供給することが難しいという問題がある。
【0010】
また、車両を減速する時には、ブレーキ装置を駆動するための油圧ポンプやブレーキアクチュエータが電気により駆動される。このために、ブレーキ装置により車両を減速する期間中にも消費電力量が多くなり、蓄電池からの電気の供給量が不足する虞があった。このため、従来の技術においては、ブレーキ装置に必要な電力が大きくなる場合には、空気調整装置、オーディオ機器、またはナビゲーション機器等を一時的に停止したりまたは消費電力が小さな状態にしたりして、ブレーキ装置に供給する電気を確保する場合があった。
【0011】
上記の特開平10−214638号公報においては、車両の運転状態に応じた蓄電装置の制御等は考慮されておらず、リチウム2次電池等の充電および放電が可能な蓄電装置を車両に配置した場合には、適切な蓄電装置の制御を行うことが好ましい。
【0012】
本発明は、車両の周辺情報に応じて車両の走行状態を制御する装置を備え、車両の走行状態に応じて適切に蓄電装置の放電電流を制御する車両の駆動装置を提供することを目的とする。
【課題を解決するための手段】
【0013】
本発明の車両の駆動装置は、車輪を回転させる駆動力を生じる電動機と、蓄電池を含み、電動機に電気を供給する蓄電装置と、蓄電池に圧力を加えることができるように形成されており、蓄電池に加える圧力を調整可能な圧力調整手段と、車両の周辺情報を検出する周辺情報検出手段と、車両の周辺情報に基づいて車両の走行状態を制御する走行制御手段とを備える。蓄電池は、正極層、電解質層および負極層の積層体を含む。走行制御手段が車両の走行状態を制御すべきときに、蓄電池に加える圧力を調整することにより、蓄電装置の放電電流の最大値を調整する。
【0014】
上記発明においては、車輪を回転させる駆動力を生じる内燃機関を更に備え、蓄電池に加える圧力を増加し、電動機に供給する電流の最大値を上昇させるとともに、電動機の出力上昇に応じて内燃機関の出力を調整することが好ましい。
【0015】
上記発明においては、蓄電装置は、蓄電池が内部に配置される密閉可能な容器を含み、圧力調整手段は、容器を密閉した状態で容器の内部に気体を供給し、蓄電池に加える圧力を調整することが好ましい。
【0016】
上記発明においては、蓄電池は、正極層、電解質層および負極層が粉体により形成されていることが好ましい。
【0017】
上記発明においては、走行制御手段は、車両の周辺情報から前方の車両が検出されない場合に、予め定められた速度範囲内になるように車両の速度を調整する定速制御を行うように形成されており、定速制御において、車両の速度が予め定められた速度範囲から逸脱した時に、圧力調整手段により蓄電池に加える圧力を増加した状態で速度を調整することができる。
【0018】
上記発明においては、電気により作動するブレーキ装置を備え、走行制御手段は、車両の周辺情報から自車両よりも遅い車両が前方に出現したことを検出した場合に、車両を減速する減速制御を行うように形成されており、減速制御において、ブレーキ装置により減速するときに、圧力調整手段により蓄電池に加える圧力を増加した状態で減速することができる。
【0019】
上記発明においては、走行制御手段は、予め定められた距離範囲内で先行車両を追従するように速度を調整する追従制御を行うように形成されており、追従制御において、先行車両との距離が予め定められた距離範囲から逸脱した時に、圧力調整手段により蓄電池に加える圧力を増加した状態で速度を調整することができる。
【0020】
上記発明においては、走行制御手段は、検出されていた先行車両が検出されなくなった場合に、予め定められた速度範囲内まで加速する加速制御を行うように形成されており、加速制御において、圧力調整手段により蓄電池に加える圧力を増加した状態で加速することができる。
【0021】
上記発明においては、走行制御手段は、予め定められた距離範囲内で先行車両を追従するように速度を調整する追従制御と、運転者が手動で追従制御を解除するとともに予め定められた速度まで加速する予備加速制御を行うように形成されており、予備加速制御において、圧力調整手段により蓄電池に加える圧力を増加した状態で加速することができる。
【発明の効果】
【0022】
本発明によれば、車両の周辺情報に応じて車両の走行状態を制御する装置を備え、車両の走行状態に応じて適切に蓄電装置の放電電流を制御する車両の駆動装置を提供することができる。
【図面の簡単な説明】
【0023】
【図1】実施の形態における車両のハイブリッド駆動装置の概略図である。
【図2】実施の形態における蓄電装置の概略部分断面図である。
【図3】実施の形態における単電池の概略斜視図である。
【図4】実施の形態における単電池の内部の概略断面図である。
【図5】実施の形態における単電池の内部の積層体の拡大概略断面図である。
【図6】実施の形態における周辺情報検出装置の機能を説明する概略図である。
【図7】実施の形態における車両の制御装置の概略図である。
【図8】実施の形態における走行制御装置による定速制御のフローチャートである。
【図9】実施の形態における走行制御装置による減速制御のフローチャートである。
【図10】実施の形態における走行制御装置による追従制御のフローチャートである。
【図11】実施の形態における走行制御装置による加速制御のフローチャートである。
【図12】実施の形態における走行制御装置による予備加速制御のフローチャートである。
【図13】実施の形態における他の蓄電装置の概略部分断面図である。
【発明を実施するための形態】
【0024】
図1から図13を参照して、実施の形態における車両の駆動装置について説明する。本実施の形態における車両は、原動機として内燃機関および電動機を含むハイブリッド型の駆動装置を備える。
【0025】
図1は、本実施の形態における車両のハイブリッド型の駆動装置の概略図である。矢印91に示す方向が車両の前方である。本実施の形態における車両の駆動装置は、車輪18に駆動力を供給する内燃機関としてのエンジン10を備える。エンジン10は、動力分割装置13および減速機15を介して、前側の車輪18の車軸16に駆動力を伝達する。車両の駆動装置は、車輪18に駆動力を供給する電動機12を備える。電動機12は、モータ減速機14および減速機15を介して、車軸16に駆動力を伝達する。
【0026】
車両の駆動装置は、電動機12に電気を供給するための蓄電装置20を備える。本実施の形態における蓄電装置20は、リチウムイオン蓄電池を含む。蓄電装置20は、昇圧コンバータ38およびインバータ39を介して電動機12に電気的に接続されている。電動機12に電気を供給する場合には、昇圧コンバータ38により直流の電気を昇圧する。昇圧した電気は、インバータ39により直流から3相交流に変換される。変換された交流の電気が電動機12に供給される。
【0027】
本実施の形態における車両の駆動装置は、動力分割装置13および電動機11を備える。動力分割装置13は、エンジン10から出力される駆動力を減速機15および電動機11に分配できるように形成されている。電動機11は、エンジン10の駆動力を受けて発電機として機能する。電動機11において生成された電気は、インバータ39に供給される。蓄電装置20の充電時には、インバータ39において交流から直流に電気が変換され、昇圧コンバータ38により降圧されて、蓄電装置20に電気が供給される。
【0028】
例えば、車両が停止している時に蓄電装置20の充電を行う場合には、エンジン10の駆動力が電動機11に伝達され、電動機11からインバータ39および昇圧コンバータ38を介して蓄電装置20に電気に供給される。また、車両が一定の速度にて走行している時や加速する時には、エンジン10の駆動力が動力分割装置13により2系統に分割される。一方の駆動力は、減速機15を介して車輪18に伝達され、他方の駆動力は、電動機11に伝達される。電動機11において生成された電気により電動機12を駆動する。更に加速時には蓄電装置20から電動機12に電気が供給される。エンジン10の駆動力に、電動機12の駆動力が加わることにより低燃費化を図ることができる。また、車両の減速時には、車輪の回転力を電動機12に伝達して発電される回生ブレーキが用いられる。回生ブレーキにより生じた電気は、インバータ39および昇圧コンバータ38を介して、蓄電装置20に供給されて充電される。
【0029】
図1には、本実施の形態における車両のブレーキ装置の一部が記載されている。本実施の形態における車両のブレーキ装置は、車軸16,17に取り付けられたディスクをブレーキパッドが押圧して車両を制動する。本実施の形態におけるブレーキ装置は、ブレーキパッドを駆動するパッド駆動装置42を含む。パッド駆動装置42は、ブレーキアクチュエータ41により制御油の油圧が供給される。本実施の形態におけるブレーキアクチュエータ41は、電気により駆動される。さらに、ブレーキ装置は、制御油を加圧する油圧ポンプを含み、油圧ポンプも電気により駆動されている。
【0030】
図2に、本実施の形態における蓄電装置の概略部分断面図を示す。本実施の形態における蓄電装置は、蓄電池としての単電池22を含む。本実施の形態においては、複数の単電池22が並んで配置されて組電池が構成されている。単電池22同士の間には、スペーサ23が配置されている。本実施の形態におけるスペーサ23は、板状に形成されている。本実施の形態における蓄電装置20は、組電池が内部に配置される容器としての密閉容器24を含む。密閉容器24は、内部の空間が密閉可能に形成されている。
【0031】
本実施の形態における車両の駆動装置は、単電池22に圧力を加えることができるように形成されている圧力調整手段としての圧力調整装置を備える。圧力調整装置は、単電池22に加える圧力が調整可能に形成されている。本実施の形態における圧力調整装置は、密閉容器24の内部の圧力を調整可能に形成されている。圧力調整装置は、密閉容器24の内部に気体を供給するガスタンク25を含む。本実施の形態においては、不活性気体がガスタンク25の内部に加圧されて充填されている。ガスタンク25は、密閉容器24の内部に配置されていても構わない。
【0032】
圧力調整装置は、密閉容器24の内部に供給する気圧を調整する圧力調整弁26を含む。圧力調整弁26は、ガスタンク25から密閉容器24の内部に気体を供給する流路の途中に配置されている。ガスタンク25から気体を供給することにより密閉容器24の内部を加圧することができる。また、本実施の形態における圧力調整装置は、密閉容器24の内部の圧力を下げるための開放弁27を有する。開放弁27は、大気中に気体を放出する流路の途中に配置されている。
【0033】
密閉容器24には、密閉容器24の内部の気圧を検出するための圧力センサ28が取り付けられている。圧力センサ28の出力は、後述する動力調整電子制御ユニット61に送信される。また、圧力調整弁26および開放弁27等の圧力調整装置に含まれる機器は、動力調整電子制御ユニット61に制御されている。
【0034】
図3に、本実施の形態における蓄電池としての単電池の概略斜視図を示す。本実施の形態における単電池22は、直方体状に形成されている。単電池22は、放電したり充電したりするための端子22aを有する。本実施の形態における端子22aは、一方が正極であり、他方が負極である。本実施の形態における単電池22は、ケース22bを有する。本実施の形態における単電池22のケース22bは、外部から圧力が加わることにより変形可能な材質で形成されている。ケース22bは、例えば、ラミネートフィルム等の薄い樹脂で形成することできる。ケース22bとしては、この形態に限られず、外部から圧力が加わったときに変形可能であれば構わない。また、本実施の形態における単電池は直方体であるが、この形態に限られず、任意の形状を採用することができる。
【0035】
図4に、本実施の形態における単電池の内部の概略断面図を示す。本実施の形態における単電池22は、正極層30と、負極層31と、正極層30および負極層31の間に介在する電解質層32とを有する。正極層30、負極層31および電解質層32の積層体が集電体33を介して積層されている。図4に示す積層体は、例えば、絶縁体を介して単電池22のケース22bの内部に配置される。所定の位置の集電体33が端子22aに接続される。
【0036】
蓄電池としては、この形態に限られず、正極層、負極層および電解質層の積層体を含んでいれば構わない。たとえば、正極層、負極層および電解質層の積層体が帯状に形成され、この帯状の積層体が巻回されたものがケースの内部に配置されていても構わない。
【0037】
図5に、本実施の形態における正極層、負極層および電解質層の部分の拡大概略断面図を示す。本実施の形態における蓄電池は、全固体型である。本実施の形態における正極層30、負極層31および電解質層32は、それぞれが粉体により形成されている。
【0038】
正極層30は、粒子状の正極活物質30aを有する。正極活物質30aとしては、全固体電池に採用可能な任意の物質を採用することができる。正極活物質30aとしては、例えば、LiCoO2またはLiNiO2などのリチウムおよび遷移金属の層状複合酸化物の粉末、LiMn2O4などのスピネル型の粉末、またはLiFePO4などのオリビン型の粉末等を用いることができる。負極層31は、粒子状の負極活物質31aを有する。負極活物質としては、全固体電池に採用可能な任意の物質を採用することができる。負極活物質としては、例えば、In粉末、Al粉末などの金属系の活物質や、メソカーボンマイクロビーズ粉末などの炭素系の活物質を用いることができる。
【0039】
電解質層32は、イオン導電性を有する粒子状の固体電解質32aを有する。固体電解質としては、全固体電池に採用可能な任意の物質を採用することができる。固体電解質としては、たとえば、硫化物系の固体電解質または酸化物系の固体電解質等を用いることができる。硫化物系の固体電解質としては、Li2S−P2S5粉末、70Li2S−30P2S5粉末、またはLi2S−SiS2粉末等を用いるができる。酸化物系の固体電解質としては、Li2S−P2O5粉末等を用いることができる。
【0040】
本実施の形態における蓄電池は、正極層30の内部および負極層31の内部にも固体電解質32aが配置されている。この構成により、正極層または負極層におけるイオン導電性の向上を図ることができる。正極層および負極層は、この形態に限られず、固体電解質が配置されてなくても構わない。
【0041】
正極層30および負極層31の外側には、集電するための集電体33が配置されている。本実施の形態における集電体33は、金属箔により形成されている。集電体としては、例えば、アルミニウム、ステンレス、または銅などの材質を用いることができる。
【0042】
本実施の形態における正極層、負極層および電解質層は、材料となる粉末をプレス機により圧縮することにより形成することができる。たとえば、固体電解質の製造方法としては、固体電解質の材質の材料を遊星ミル装置等の粉砕機で粉砕した後に、プレス機で圧粉することにより製造することができる。圧粉する工程においては、正極層、負極層および電解質層を個別に圧縮することができる。または、複数の層の材料となる粉末を順にプレス機に投入し、一度に圧粉を行なっても構わない。
【0043】
図6に、本実施の形態における車両の周辺情報を検出する周辺情報検出装置を説明する概略図を示す。図6においては、一つの車線に自車両51および自車両51の前に先行車両52が走行している状態を示している。自車両51および先行車両52は、矢印94に示す方向に走行している。
【0044】
本実施の形態における自車両51には、車両の周辺情報を検出する周辺情報検出手段として、周辺情報検出装置が取り付けられている。本実施の形態における周辺情報検出装置は、車両51の前方に向かって電波を発振するレーダセンサ53を備える。本実施の形態におけるレーダセンサ53は、ミリ波を発振する。また、レーダセンサ53は、レーダ認知範囲54に先行車両52等の対象物が存在した場合に、対象物等に反射して戻る電波を受信する。
【0045】
レーダセンサ53は、受信した電波の周波数の変化や電子スキャンなどにより、自車両51が走行している車線上の先行車両52の有無を判別することができる。また、先行車両52との距離や相対速度等を演算することができる。レーダセンサ53の出力は、後述する運転支援電子制御ユニットに送信される。周辺情報検出装置としては、この形態に限られず、車両の周辺の情報を検出できる任意の装置を採用することができる。
【0046】
図7に、本実施の形態における車両の制御装置の概略図を示す。それぞれの電子制御ユニット(ECU:Electronic Control Unit)は、例えばCAN(Controller Area Network)通信などにより、互いの通信を行なっている。
【0047】
図1および図7を参照して、電動機電子制御ユニット62は、昇圧コンバータ38およびインバータ39を制御する。電動機12に供給される電流は、電動機電子制御ユニット62により制御される。エンジン電子制御ユニット63は、エンジン10を制御する。例えば、エンジン電子制御ユニット63は、エンジン10のスロットル弁の開度や点火時期などを制御する。ブレーキ電子制御ユニット64は、ブレーキ装置を制御する。例えば、ブレーキ装置の油圧ポンプやブレーキアクチュエータ41を制御する。
【0048】
本実施の形態における動力調整電子制御ユニット61は、アクセルペダルの踏み込み量等のセンサの出力および他の電子制御ユニットの出力等に基づいて、運転状態に応じたエンジン10の出力および電動機12の出力を算出する。算出されたそれぞれの要求出力は、電動機電子制御ユニット62およびエンジン電子制御ユニット63に送信される。送信された要求出力に基づいて、電動機12に供給する電流やエンジン10のスロットル弁の開度等が定められる。また、動力調整電子制御ユニット61は、蓄電装置20の蓄電量、電流、電圧および温度等の蓄電装置の状態を監視する。
【0049】
本実施の形態における車両は、周辺情報検出装置により検出された周辺情報に基づいて、車両の走行状態を制御し、運転者の運転を支援する走行制御装置を備える。本実施の形態における走行制御装置は、運転支援電子制御ユニット65を含む。運転支援電子制御ユニット65は、レーダセンサ53の出力等を受信し、受信した周辺情報に基づいて要求出力等を算出する。算出した要求出力等は動力調整電子制御ユニット61に送信される。また、運転支援電子制御ユニット65は、ブレーキ装置による制動が必要であると判別する場合には、ブレーキ電子制御ユニット64に要求される制動力を送信する。ブレーキ電子制御ユニット64は、要求される制動力に基づいてブレーキ装置を制御する。
【0050】
本実施の形態における走行制御装置は、車両の周辺情報から先行車両が検出されない場合に、予め定められた速度範囲内になるように車両の速度を調整する定速制御を行なう。定速制御では、先行車両が存在しないときに、ほぼ一定の速度で走行するように制御される。予め定められた速度範囲は、たとえば、運転者がハンドル等に配置されたボタン等により希望速度を選択し、選択された希望速度に対して所定の速度幅を考慮した範囲を定めることができる。
【0051】
また、本実施の形態における走行制御装置は、先行車両を検出してない状態から検出した状態になった場合には減速制御を行う。減速制御では、自車両よりも速度の遅い車両が前方に出現したことを検出した場合に、自車両を減速する制御を行う。例えば、遠方を走行していた先行車両が近づいてきたとき、または、他の車線を走行していた車両が自車両の走行している車線に車線変更して先行車両になった場合等には減速制御を行う。
【0052】
また、本実施の形態における走行制御装置は、減速制御を行って自車両の速度が先行車両の速度とほぼ同じになった場合には、先行車両を追従する追従制御を行う。追従制御では、予め定められた距離範囲内にて先行車両を追従するように自車両の速度を調整する。先行車両との車間距離は、例えば自車両の速度に応じて予め定められている。例えば、追従制御を行うときの車間距離は、自車両の速度に比例した距離を採用することができる。予め定められた距離範囲は、選定された車間距離に対して所定の距離幅を考慮した範囲を定めることができる。
【0053】
本実施の形態における走行制御装置は、追従制御を行っているときに、既に検出されていた先行車両が検出されなくなった場合には、予め定められた速度範囲内まで加速する加速制御を行う。たとえば、先行車両が車線変更を行なったり、自車両が車線変更を行なったりして、前方を走行する車両が無くなった場合には、自車両の速度を予め定められた速度範囲内まで加速する。予め定められた速度範囲としては、例えば、定速制御における速度範囲を採用することができる。また、加速制御を行って、自車両の速度が予め定められた速度範囲内になった場合には、定速制御を行なうことができる。
【0054】
ところで、本実施の形態における走行制御装置による制御には、車両を加速する制御が含まれる。本実施の形態における走行制御装置は、内燃機関の出力に加えて電動機の出力を用いて加速するように制御する。走行制御装置によりを走行している期間中において、車両が加速をすべきときには、蓄電池に加える圧力を上昇させる制御を行う。
【0055】
図2を参照して、圧力調整装置は、蓄電装置20の密閉容器24の内部の気圧を上昇させる。蓄電装置20の内部の気圧を上昇させる制御においては、圧力調整弁26を開いて、ガスタンク25の内部に溜められている気体を密閉容器24の内部に供給する。密閉容器24の内部の気圧が上昇するために、単電池22に加わる圧力を大きくすることができる。密閉容器24の内部を加圧する前の蓄電装置20の通常運転時の圧力(通常圧力)としては、例えば大気圧を例示することができる。
【0056】
本実施の形態における圧力調整装置は、通常運転時の圧力から予め定められた加速用設定圧力まで密閉容器24の内部の圧力を上昇させる。密閉容器24の内部の圧力は、圧力センサ28により検出することができる。
【0057】
密閉容器24の内部の圧力が上昇することにより、単電池22に加わる圧力が増加する。例えば、矢印92に示すように、単電池22に対して圧力が作用する。図5を参照して、単電池の内部の正極層30、負極層31および電解質層32の積層体には、例えば矢印93に示すように圧縮される向きに力が加わる。本実施の形態における蓄電池は、正極層30、負極層31および電解質層32が粒子状物質を含む粉体により形成されている。それぞれの層の粒子同士の間には隙間が形成されているが、積層体に圧力が加わることによって隙間が少なくなったり、粒子同士の接触面積が大きくなったりするために、単電池22の内部抵抗が小さくなる。単電池22の内部抵抗が小さくなるために、蓄電装置20は大きな電流を出力することができる。蓄電装置が放電可能な電流の最大値を、蓄電装置の内部を加圧する前の電流の最大値よりも大きくすることができる。
【0058】
本実施の形態においては、蓄電装置20の内部の圧力を上昇させるとともに、動力調整電子制御ユニット61が、蓄電装置20の放電電流の最大値を上昇する。すなわち、蓄電装置20の放電電流の許容値を大きくする。また、電動機12の要求出力の上限値を大きくする。本実施の形態における動力調整電子制御ユニット61は、車両を加速する場合に、蓄電装置20の内部を加圧しないときの出力よりも大きな出力を電動機12に対して要求する。電動機電子制御ユニット62は、要求出力に応じて蓄電装置20の内部を加圧しないときの電流よりも大きな電流を電動機12に供給するように制御する。
【0059】
本実施の形態における車両は、加速する場合に蓄電池に加える圧力を増加することにより、エンジン10に対する電動機12の負荷割合を大きくすることができる。この結果、エンジン10の負荷を減らすことができて、燃料の消費量を低減することができる。更に、本実施の形態においては、電動機12の負荷割合を増加することができるために、時間遅れを抑制することができる。すなわち、加速時の応答性を向上させることができる。
【0060】
また、本実施の形態においては、車両の減速を行なうときにも、蓄電池に加える圧力を上昇させる制御を行う。特に、ブレーキ装置により車両を制動するときに、蓄電池に加える圧力を高くすることが好ましい。この制御を行なうことによって、蓄電装置から供給される最大電流を増加させることができる。このため、ブレーキ装置に含まれる油圧ポンプやブレーキアクチュエータ等を駆動する電気を十分に供給することができ、他の空調装置等の補機への電力供給を低減したり遮断したりすることを抑制できる。また、ブレーキ装置への供給電力を増加させることにより、ブレーキ装置による制動力を増加させることができて、安全性の向上を支援することができる。
【0061】
図2を参照して、本実施の形態においては、車両の減速時にも車両の加速時と同様に蓄電装置20の密閉容器24の内部の気圧を上昇させる制御を行う。本実施の形態における圧力調整装置は、通常運転時の圧力から予め定められた減速用設定圧力まで、密閉容器24の内部の圧力を上昇させる。車両を加速する場合の加速用設定圧力と車両を減速する場合の減速用設定圧力とは、互いに同じ圧力でも異なる圧力でも構わない。例えば、加速するときの加速用設定圧力が減速するときの減速用設定圧力よりも大きくなるように定めても構わない。
【0062】
このように、本実施の形態においては走行制御装置による制御を行う期間中に、車両の加速または減速を行うべきときに蓄電池に加える圧力を増加させる制御を行う。車両の加速または減速が終了したら、蓄電池に加える圧力を減少させて通常運転時の元の圧力に戻す制御を行うことができる。図2を参照して、圧力調整装置は、蓄電装置の内部の圧力を通常運転時の圧力に戻す場合には、開放弁27を開いて内部の気体を大気中に放出することにより蓄電装置の内部の圧力を下げることができる。
【0063】
次に、本実施の形態の走行制御装置による定速制御、減速制御、追従制御および加速制御のそれぞれについて具体例を取り上げて説明する。
【0064】
図8は、本実施の形態における走行制御装置による定速制御のフローチャートである。本実施の形態においては、運転者が走行制御装置を始動した場合に定速制御から開始される。図8に示す定速制御は、例えば、予め定められた時間間隔ごとに繰り返して行なうことができる。
【0065】
始めにステップ101においては、周辺情報検出装置により先行車両が検出されるか否かを判別する。ステップ101において、先行車両が検出される場合には後述する減速制御に移行する。ステップ101において、先行車両が検出されない場合には、ステップ102に移行する。
【0066】
ステップ102においては、車両の速度が予め定められた速度範囲の上限速度判定値以上か否かを判別する。ステップ102において、車両の速度が予め定められた速度範囲の上限速度判定値以上であれば、ステップ103に移行する。
【0067】
ステップ103においては、蓄電装置の内部の気圧を減速用設定圧力まで上昇する。この制御を行なうことにより、蓄電装置から放電可能な最大電流を大きくすることができる。動力調整電子制御ユニットは、蓄電装置の放電電流の最大値を上昇させる制御を行う。
【0068】
次に、ステップ104においては、車両を減速する制御を行う。ステップ104の減速においては、例えば、予め定められた速度幅にて減速を行なうことができる。または、上限速度判定値を越える速度幅を算出して、この速度幅に応じて減速しても構わない。ステップ104においては、エンジンのスロットル弁を閉じる制御を行うことができる。または、電動機に供給する電力を減少させる制御を行うことができる。更に、エンジンの出力や電動機の出力の制御では不十分の場合には、回生ブレーキやブレーキ装置を駆動して車両の減速を行っても構わない。ブレーキ装置を駆動する場合においても、蓄電池に圧力を加えているために、ブレーキ装置に加えて空調装置等に必要な電力を確保することができる。ステップ102において、車両の速度が上限速度判定値未満の場合には、ステップ105に移行する。
【0069】
ステップ105においては、車両の速度が予め定められた速度範囲の下限速度判定値以下であるか否かを判別する。ステップ105において、車両の速度が下限速度判定値以下である場合には、ステップ106に移行する。
【0070】
ステップ106においては、蓄電装置の内部の気圧を加速用設定圧力まで上昇する。この制御を行なうことにより、蓄電装置から放電可能な最大電流を大きくすることができる。動力調整電子制御ユニットは、電動機の出力の最大値および蓄電装置の放電電流の最大値を上昇させる制御を行う。
【0071】
次に、ステップ107においては、車両を加速する制御を行う。ステップ107の加速においては、例えば、予め定められた速度幅にて加速することができる。または、下限速度判定値を下回る速度幅を算出し、この速度幅に応じて加速しても構わない。本実施の形態においては、通常運転時における蓄電装置の最大電流よりも大きな電流を電動機に供給することができる。電動機の負荷割合を大きくすることができるために応答性が向上する。また、内燃機関にて消費される燃料の量を少なくすることができる。ステップ105において、車両の速度が下限速度判定値よりも大きい場合には、ステップ108に移行する。この場合には、自車両の速度が予め定められた速度判定範囲内である。
【0072】
ステップ108においては、蓄電装置の内部の気圧を通常運転時の圧力まで低下させる制御を行う。本実施の形態においては蓄電装置の内部の気圧を元の圧力まで戻している。
【0073】
このように、定速制御においては加速および減速を行うときに、蓄電池に加える圧力を高くして、蓄電装置の放電電流の最大値を大きくすることができる。電動機、ブレーキ装置、または補機等に供給する電力を大きくすることができる。
【0074】
図9に、本実施の形態における走行制御装置による減速制御のフローチャートを示す。本実施の形態における減速制御は、自車両の前に先行車両が出現した場合に行なうことができる。周辺情報検出装置が先行車両を検出していない状態から、先行車両を検出した状態に変化した時に行うことができる。図9に示す減速制御は、例えば予め定められた時間間隔ごとに繰り返し行なうことができる。
【0075】
始めにステップ101においては、先行車両が検出されるか否かを検出する。先行車両が検出されない場合には、減速制御を繰り返し行っている期間中に先行車両が車線変更等により存在しなくなった場合等である。この場合には、加速制御に移行する。ステップ101において、先行車両が検出される場合にはステップ113に移行する。
【0076】
ステップ113においては、周辺情報検出装置により先行車両と自車両との距離を検出し、先行車両と自車両との距離が予め定められた距離判定値以下であるか否かが判別される。ステップ113においては、自車両と先行車両との距離が、減速が必要である程度に近いか否かを判別する。ステップ113において、先行車両と自車両との距離が予め定められた距離判定値よりも大きければ、ステップ114に移行する。
【0077】
ステップ114においては、減速制御を開始してから予め定められた時間を経過したか否かを判別する。すなわち、ステップ101およびステップ113を繰り返し行なっている時間が所定の時間を越えたか否かを判別する。ステップ114において、所定の時間が経過していない場合には、ステップ101に戻る。例えば、減速制御を開始したときに、先行車両と自車両との距離が十分長い場合であっても、先行車両の速度が自車両に比べて非常に遅い場合には、急激に自車両と先行車両との距離が縮まるために制動が必要になる。ステップ114を行うことにより、先行車両と自車両との距離が距離判定値以下か否かの判別を繰り返すことができて、減速の要否を所定の時間の間繰り返すことができる。
【0078】
ステップ114において、減速制御を開始してから所定の時間が経過している場合には追従制御に移行する。ステップ113において、自車両と先行車両との距離が予め定められた距離判定値以下である場合には、ステップ116に移行する。この場合には、車両の減速が必要であると判別する。
【0079】
ステップ116においては、エンジンの制御を行なう。本実施の形態においては、エンジンのスロットル弁の開度を小さくする。また、エンジンにおいて燃焼室への燃料の供給を減少させることにより減速する。さらに、電動機を駆動している場合には、電動機に供給する電力量を小さくする制御を行っても構わない。更に、回生ブレーキを併用しても構わない。
【0080】
次に、ステップ117においては、予め定められた第1時間以内に、先行車両に衝突するか否かを判別する。本実施の形態においては、自車両がX秒以内に先行車両に衝突するか否かを判別する。所定の時間内に先行車両に衝突するか否かは、例えば、自車両と先行車両との速度差および自車両と先行車両との距離に基づいて判別することができる。
【0081】
ステップ117において、X秒以内に先行車両に衝突しないと判別される場合には、ステップ101に戻る。ステップ117において、X秒以内に先行車両に衝突すると判別される場合には、ステップ118に移行する。
【0082】
ステップ118においては、蓄電装置の内部の気圧を減速用設定圧力まで上昇する。本実施の形態においては、蓄電装置の密閉容器の内部の圧力を上昇させる。次に、ステップ119においては、ブレーキ装置により減速する。蓄電装置の放電電流の最大値を上昇させた状態で、ブレーキ装置により減速することができる。
【0083】
次に、ステップ120においては、予め定められた第2時間以内に、先行車両に衝突するか否かを判別する。本実施の形態においては、自車両がY秒以内に先行車両に衝突するか否かを判別する。ステップ120において、Y秒以内に先行車両に衝突しないと判別される場合には、ステップ101に戻る。ステップ120において、Y秒以内に先行車両に衝突すると判別される場合には、ステップ121に移行する。
【0084】
ステップ121においては、運転者に警告を行う。本実施の形態においては、運転席の前に配置されている運転状態を表示するインストルメントパネルに警告灯を点灯させ、さらに、警告音により先行車両が近づいていることを運転者に警告する。
【0085】
次に、ステップ122においては、予め定められた第3時間以内に、先行車両に衝突するか否かを判別する。本実施の形態においては、自車両がZ秒以内に先行車両に衝突するか否かを判別する。ステップ122において、Z秒以内に先行車両に衝突しないと判別される場合には、ステップ101に戻る。Z秒以内に先行車両に衝突すると判別される場合には、ステップ123に移行する。ステップ117、ステップ120およびステップ122において、それぞれの判定時間は、X秒が最も長く、Y秒およびZ秒の順に徐々に短くなっている。ステップ122において、Z秒以内に先行車両に衝突すると判別される場合には、先行車両が接近している状態である。
【0086】
ステップ123においては、ブレーキ装置により減速する。この場合に、ステップ118と同様に、再度、蓄電装置の内部の気圧を上昇させて減速を行っても構わない。ステップ123における減速の後にステップ124に移行する。
【0087】
ステップ124においては、蓄電装置の内部の気圧を通常運転時の圧力まで低下させる。
【0088】
このように、減速制御においては減速するときに、蓄電池に加える圧力を高くして、蓄電装置の放電電流の最大値を大きくすることができる。ブレーキ装置に加えて空調装置等に供給する電力を確保することができる。
【0089】
図10に、本実施の形態における走行制御装置による追従制御のフローチャートを示す。追従制御は、先行車両が検出されている期間に行うことができる。図10に示す追従制御は、例えば予め定められた時間間隔ごとに繰り返して行なうことができる。
【0090】
始めに、ステップ101において、先行車両が検出されているか否かを判別する。先行車両が検出されない場合には、先行車両が車線変更をしたり自車両が車線変更を行ったりして、先行車両が存在しなくなった場合である。この場合には、加速制御に移行する。ステップ101において、先行車両が検出される場合にはステップ132に移行する。
【0091】
ステップ132においては、自車両と先行車両との距離が、予め定められた距離範囲の下限距離判定値以下であるか否かを判別する。すなわち、自車両が先行車両に近づいているか否かを判別する。ステップ132において、先行車両との距離が下限距離判定値以下の場合には、ステップ103およびステップ104に移行する。ステップ103においては、蓄電装置の内部の気圧を減速用設定圧力まで上昇させる。次に、ステップ104においては減速する。本実施の形態における減速の制御は、前述の定速制御の減速と同様の制御を採用している。または、前述の減速制御と同様の制御を採用しても構わない。
【0092】
ステップ132において、先行車両と自車両との距離が、下限距離判定値よりも大きい場合には、ステップ135に移行する。ステップ135においては、自車両と先行車両との距離が、予め定められた上限距離判定値以上か否かが判別される。すなわち、自車両が先行車両と離れすぎていないかが判別される。ステップ135において、先行車両と自車両の距離が上限距離判定値以上の場合には、ステップ106およびステップ107に移行する。ステップ106においては、蓄電装置の内部の気圧を加速用設定圧力まで上昇し、蓄電装置の放電電流の最大値を上昇させる。ステップ107においては、加速する。
【0093】
次に、ステップ135において、先行車両と自車両との距離が上限距離判定値未満であると判別される場合には、ステップ138に移行する。この場合には、先行車両と自車両との距離が、予め定められた距離範囲内である。
【0094】
ステップ138においては、蓄電装置の内部の気圧を通常運転時の圧力まで低下させる。蓄電装置の内部の気圧が通常運転時の圧力である場合には、この圧力を維持する。
【0095】
このように、追従制御においては、加速または減速を行うときに、蓄電池に加える圧力を高くして、蓄電装置の放電電流の最大値を大きくすることができる。電動機、ブレーキ装置、または空調装置等に供給する電力を大きくすることができる。
【0096】
本実施の形態においては、追従制御を行っているときに先行車両が存在しなくなった場合には、加速制御に移行しているが、この形態に限られず、定速制御に移行しても構わない。
【0097】
図11に、本実施の形態における走行制御装置による加速制御のフローチャートを示す。加速制御は、先行車両が存在する状態から存在しない状態に移行した場合に行うことができる。
【0098】
始めに、ステップ101においては、先行車両が検出されているか否かを判別する。ステップ101において、先行車両が検出される場合には、減速制御に移行する。ステップ101において、先行車両が検出されない場合には、ステップ141に移行する。
【0099】
ステップ141においては、自車両の速度が、予め定められた速度範囲の下限速度判定値以下であるか否かを判別する。ステップ141において、自車両の速度が下限速度判定値以下の場合には、ステップ106およびステップ107に移行して、蓄電装置の内部の圧力を加速用設定圧力まで上昇し、車両を加速する制御を行う。ステップ141において、自車両の速度が下限速度判定値よりも大きい場合には、ステップ142に移行する。
【0100】
ステップ142においては、蓄電装置の内部の気圧を通常運転時の圧力まで低下させる。蓄電装置の内部の気圧が既に通常運転時の圧力である場合には、この圧力を維持する。ステップ142が完了したら定速制御に移行する。
【0101】
このように、加速制御においては、加速を行うべきときに蓄電池に加える圧力を高くして、蓄電装置の放電電流の最大値を大きくして、電動機に供給する電力を大きくすることができる。
【0102】
ところで、加速制御は、例えば先行車両の追い越しをするために車線変更をした場合に行なわれる。ところが、先行車両の追い越しを行う場合には、車線を変更してから加速するのではなく、車線変更をしながら加速すると、追い越し時間が短くなり好ましい。また、一般的に、走行車線を走行する車両よりも追い越し車線を走行する車両の方が高速であり、追い越し車線を走行する車両との車間距離を保つためにも、加速しながら追い越し車線に車線変更することが好ましい。
【0103】
本実施の形態における走行制御装置は、運転者が手動操作することにより追従制御を解除すると共に、予め定められた速度範囲内まで加速する予備加速制御を行うように形成されている。
【0104】
図12に、本実施の形態における予備加速制御のフローチャートを示す。始めにステップ150において、運転者による予備加速制御の指示を検出する。例えば、ハンドル等に配置されている予備加速制御用の開始ボタンを運転者が押したことを検出する。
【0105】
ステップ151においては、運転者による車線変更の操作が行なわれたか否かを判別する。本実施の形態においては、ハンドル操作が行なわれたか否かを判別する。車線変更の操作としては、この形態に限られず、例えば、方向指示器により指示を出す操作を検出しても構わない。ステップ151において、ハンドル操作が行なわれていない場合には、引き続き現在の車線を走行すると判別することができる。この場合には、追従制御に移行する。ステップ151において、ハンドル操作が行なわれている場合には、車線変更を行うと判別することができる。この場合には、ステップ152に移行する。
【0106】
ステップ152においては、自車両の速度が、予め定められた設定速度判定値以下であるか否かを判別する。この速度としては、定速制御の速度範囲の下限速度判定値を採用することができる。または、定速制御の下限速度判定値と異なる速度を採用しても構わない。たとえば、自車両の現在の速度に予め定められた速度増加分を加算した速度を採用しても構わない。
【0107】
ステップ152において、自車両の速度が、予め定められた設定速度判定値以下である場合には、ステップ106およびステップ107に移行する。ステップ106においては、蓄電装置の内部の気圧を加速用設定圧力まで加圧し、さらに、ステップ107においては加速する制御を行う。ステップ152において、自車両の速度が設定速度判定値よりも大きい場合には、ステップ155に移行する。
【0108】
ステップ155においては、蓄電装置の内部の気圧を通常運転時の圧力まで低下させる制御を行う。蓄電装置の内部の気圧が、既に通常運転時の圧力である場合には、この圧力を維持する。ステップ155が終了したら定速制御に移行する。
【0109】
この様に、予備加速制御において加速する場合にも、蓄電池に加える圧力を高くして、蓄電装置の放電電流の最大値を大きくする制御を行うことができる。
【0110】
図2を参照して、本実施の形態の圧力調整装置は、内部に単電池22が配置された密閉容器24を密閉した状態で、密閉容器24の内部に気体を供給し、単電池22に加える圧力を調整している。この構成を採用することにより、蓄電池に加える圧力調整を短時間で行うことができる。たとえば、機械ばね等により圧力を調整する圧力調整装置と比較した場合に、圧力変更を速くすることができ、圧力調整の応答性が向上する。
【0111】
図13に、本実施の形態における他の圧力調整装置を説明する蓄電装置の概略部分断面図を示す。他の圧力調整装置は、複数の単電池22を含む組電池の両側の側面に配置されている加圧部材29を含む。加圧部材29は、内部空間を有し、伸縮可能に形成されている。加圧部材29は、内部の圧力が上昇することにより、大きくなるように形成されている。加圧部材29は、圧力調整弁26を介してガスタンク25に接続されている。また、加圧部材29は、開放弁27が開くことにより、内部の圧力を低下させることができるように形成されている。本実施の形態における加圧部材29は、組電池を挟み込むように、組電池の長手方向の両側に配置されている。
【0112】
他の圧力調整装置において、単電池22に加える圧力を増加する場合には、圧力調整弁26を開く制御を行うことにより、加圧部材29の内部の圧力を上昇させる。加圧部材29が組電池を押圧し、矢印92に示すように、組電池に含まれる単電池22に加える圧力を上昇させることができる。
【0113】
本実施の形態における圧力調整装置は、気体により蓄電池を加圧するように形成されているが、この形態に限られず、任意の構造により蓄電池を加圧することができる。たとえば、液体などの他の流体を用いて蓄電池を加圧するように形成されていても構わない。
【0114】
本実施の形態においては、車両の周辺情報として、自車両の前を走行する先行車両を例に取り上げて説明したが、この形態に限られず、車両の周辺情報としては、走行に伴って変化する車両の周囲の任意の情報を採用することができる。例えば、車両の前方に現れる障害物や車両の前方に飛び出す人等であっても構わない。このような時に減速する場合にも、本実施の形態における減速制御のように、蓄電装置の内部の気圧を上昇させるとともに、蓄電池の最大電流を上昇させて減速時における電力を確保することができる。
【0115】
また、本実施の形態における走行制御手段は、定速制御、減速制御、追従制御、加速制御、および予備加速制御を例に取り上げて説明したが、この形態に限られず、検出した周辺情報に基づいて車両の走行状態を制御する任意の手段を採用することができる。例えば、走行制御手段は、定速制御を行っている期間中に、一時的に手動操作により加速や減速を行う制御を採用することができる。または、走行制御手段として、路面の状態等の周辺情報に応じて、前後車輪の駆動力配分を可変にし、さらに、後輪に伝達された駆動力を左右に可変に配分する配分装置を採用することができる。このような駆動力を配分する配分装置は電気により駆動することができる。この配分装置を駆動すべきときに、蓄電池に加える圧力を調整し、蓄電池の放電可能な電流を調整することができる。
【0116】
また、走行制御手段は、複数の走行モードを選択可能な制御手段を含むことができる。たとえば、通常走行モードに加えてスポーツド走行モードを備えた車両を採用することができる。スポーツ走行モードが選択された時には、同一のアクセルペダルの踏み込み量に対して通常走行モードよりも要求負荷を大きくしたり、電動パワーステアリング装置によりステアリングの応答性を高くしたり、タイヤの空転を抑制するトラクションコントロール機能を作動させたりすることができる。このような走行モードを切替える場合には、蓄電池に加えられる圧力を調整し、蓄電池の放電可能な電流を調整することにより、必要とする機能に応じた電流を供給することができる。また、走行制御手段は、電気によるモータ駆動とエンジン駆動のうち、モータ駆動のみが選択される制御手段を含むこととができる。モータ駆動のみを行う制御またはモータ駆動とエンジン駆動とを併用する制御とを切替える場合には、蓄電池に加えられる圧力を調整し、蓄電池の放電可能な電流を調整することができる。たとえば、モータ駆動のみを選択した場合には、蓄電池に加えられる圧力を増やすことで、低速走行時における出力を増加させることができる。
【0117】
本実施の形態における蓄電池は、正極層、負極層および電解質層が粒子状物質を含む粉体により形成されているが、この形態に限られず、正極層、負極層および電解質層のうち、少なくとも一つの層が粒子状物質を含む粉体により形成されていれば構わない。更には、蓄電池は、正極層、負極層および電解質層の積層体を含んでいれば構わない。この場合においても蓄電池の積層体に圧力を加えることにより、それぞれの層同士の接触抵抗を小さくすることができて、蓄電池の放電可能な電流の最大値を大きくすることができる。
【0118】
また、本実施の形態においては、内燃機関および電動機を備えるハイブリッド型の車両の駆動装置について説明を行ったが、この形態に限られず、蓄電池を備える車両の駆動装置に、本発明を提供することができる。例えば、電気自動車に本発明を適用することができる。
【0119】
上述のそれぞれの図において、同一または相当する部分には同一の符号を付している。なお、上記の実施の形態は例示であり発明を限定するものではない。また、実施の形態においては、特許請求の範囲に示される変更が含まれている。
【符号の説明】
【0120】
10 エンジン
11,12 電動機
13 動力分割装置
14 モータ減速機
15 減速機
18 車輪
20 蓄電装置
22 単電池
24 密閉容器
25 ガスタンク
26 圧力調整弁
27 開放弁
29 加圧部材
30 正極層
31 負極層
32 電界質層
41 ブレーキアクチュエータ
51 車両
53 レーダセンサ
61 動力調整電子制御ユニット
62 電動機電子制御ユニット
63 エンジン電子制御ユニット
64 ブレーキ電子制御ユニット
65 運転支援電子制御ユニット
【特許請求の範囲】
【請求項1】
車輪を回転させる駆動力を生じる電動機と、
蓄電池を含み、電動機に電気を供給する蓄電装置と、
蓄電池に圧力を加えることができるように形成されており、蓄電池に加える圧力を調整可能な圧力調整手段と、
車両の周辺情報を検出する周辺情報検出手段と、
車両の周辺情報に基づいて車両の走行状態を制御する走行制御手段とを備え、
蓄電池は、正極層、電解質層および負極層の積層体を含み、
走行制御手段が車両の走行状態を制御すべきときに、蓄電池に加える圧力を調整することにより、蓄電装置の放電電流の最大値を調整することを特徴とする、車両の駆動装置。
【請求項2】
車輪を回転させる駆動力を生じる内燃機関を更に備え、
蓄電池に加える圧力を増加し、電動機に供給する電流の最大値を上昇させるとともに、電動機の出力上昇に応じて内燃機関の出力を調整することを特徴とする、請求項1に記載の車両の駆動装置。
【請求項3】
蓄電装置は、蓄電池が内部に配置される密閉可能な容器を含み、
圧力調整手段は、容器を密閉した状態で容器の内部に気体を供給し、蓄電池に加える圧力を調整することを特徴とする、請求項1または2に記載の車両の駆動装置。
【請求項4】
蓄電池は、正極層、電解質層および負極層が粉体により形成されていることを特徴とする、請求項1から3のいずれか一項に記載の車両の駆動装置。
【請求項5】
走行制御手段は、車両の周辺情報から前方の車両が検出されない場合に、予め定められた速度範囲内になるように車両の速度を調整する定速制御を行うように形成されており、
定速制御において、車両の速度が予め定められた速度範囲から逸脱した時に、圧力調整手段により蓄電池に加える圧力を増加した状態で速度を調整することを特徴とする、請求項1から4のいずれか一項に記載の車両の駆動装置。
【請求項6】
電気により作動するブレーキ装置を備え、
走行制御手段は、車両の周辺情報から自車両よりも遅い車両が前方に出現したことを検出した場合に、車両を減速する減速制御を行うように形成されており、
減速制御において、ブレーキ装置により減速するときに、圧力調整手段により蓄電池に加える圧力を増加した状態で減速することを特徴とする、請求項1から4のいずれか一項に記載の車両の駆動装置。
【請求項7】
走行制御手段は、予め定められた距離範囲内で先行車両を追従するように速度を調整する追従制御を行うように形成されており、
追従制御において、先行車両との距離が予め定められた距離範囲から逸脱した時に、圧力調整手段により蓄電池に加える圧力を増加した状態で速度を調整することを特徴とする、請求項1から4のいずれか一項に記載の車両の駆動装置。
【請求項8】
走行制御手段は、検出されていた先行車両が検出されなくなった場合に、予め定められた速度範囲内まで加速する加速制御を行うように形成されており、
加速制御において、圧力調整手段により蓄電池に加える圧力を増加した状態で加速することを特徴とする、請求項1から4のいずれか一項に記載の車両の駆動装置。
【請求項9】
走行制御手段は、予め定められた距離範囲内で先行車両を追従するように速度を調整する追従制御と、運転者が手動で追従制御を解除するとともに予め定められた速度まで加速する予備加速制御を行うように形成されており、
予備加速制御において、圧力調整手段により蓄電池に加える圧力を増加した状態で加速することを特徴とする、請求項1から4のいずれか一項に記載の車両の駆動装置。
【請求項1】
車輪を回転させる駆動力を生じる電動機と、
蓄電池を含み、電動機に電気を供給する蓄電装置と、
蓄電池に圧力を加えることができるように形成されており、蓄電池に加える圧力を調整可能な圧力調整手段と、
車両の周辺情報を検出する周辺情報検出手段と、
車両の周辺情報に基づいて車両の走行状態を制御する走行制御手段とを備え、
蓄電池は、正極層、電解質層および負極層の積層体を含み、
走行制御手段が車両の走行状態を制御すべきときに、蓄電池に加える圧力を調整することにより、蓄電装置の放電電流の最大値を調整することを特徴とする、車両の駆動装置。
【請求項2】
車輪を回転させる駆動力を生じる内燃機関を更に備え、
蓄電池に加える圧力を増加し、電動機に供給する電流の最大値を上昇させるとともに、電動機の出力上昇に応じて内燃機関の出力を調整することを特徴とする、請求項1に記載の車両の駆動装置。
【請求項3】
蓄電装置は、蓄電池が内部に配置される密閉可能な容器を含み、
圧力調整手段は、容器を密閉した状態で容器の内部に気体を供給し、蓄電池に加える圧力を調整することを特徴とする、請求項1または2に記載の車両の駆動装置。
【請求項4】
蓄電池は、正極層、電解質層および負極層が粉体により形成されていることを特徴とする、請求項1から3のいずれか一項に記載の車両の駆動装置。
【請求項5】
走行制御手段は、車両の周辺情報から前方の車両が検出されない場合に、予め定められた速度範囲内になるように車両の速度を調整する定速制御を行うように形成されており、
定速制御において、車両の速度が予め定められた速度範囲から逸脱した時に、圧力調整手段により蓄電池に加える圧力を増加した状態で速度を調整することを特徴とする、請求項1から4のいずれか一項に記載の車両の駆動装置。
【請求項6】
電気により作動するブレーキ装置を備え、
走行制御手段は、車両の周辺情報から自車両よりも遅い車両が前方に出現したことを検出した場合に、車両を減速する減速制御を行うように形成されており、
減速制御において、ブレーキ装置により減速するときに、圧力調整手段により蓄電池に加える圧力を増加した状態で減速することを特徴とする、請求項1から4のいずれか一項に記載の車両の駆動装置。
【請求項7】
走行制御手段は、予め定められた距離範囲内で先行車両を追従するように速度を調整する追従制御を行うように形成されており、
追従制御において、先行車両との距離が予め定められた距離範囲から逸脱した時に、圧力調整手段により蓄電池に加える圧力を増加した状態で速度を調整することを特徴とする、請求項1から4のいずれか一項に記載の車両の駆動装置。
【請求項8】
走行制御手段は、検出されていた先行車両が検出されなくなった場合に、予め定められた速度範囲内まで加速する加速制御を行うように形成されており、
加速制御において、圧力調整手段により蓄電池に加える圧力を増加した状態で加速することを特徴とする、請求項1から4のいずれか一項に記載の車両の駆動装置。
【請求項9】
走行制御手段は、予め定められた距離範囲内で先行車両を追従するように速度を調整する追従制御と、運転者が手動で追従制御を解除するとともに予め定められた速度まで加速する予備加速制御を行うように形成されており、
予備加速制御において、圧力調整手段により蓄電池に加える圧力を増加した状態で加速することを特徴とする、請求項1から4のいずれか一項に記載の車両の駆動装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2012−222981(P2012−222981A)
【公開日】平成24年11月12日(2012.11.12)
【国際特許分類】
【出願番号】特願2011−87219(P2011−87219)
【出願日】平成23年4月11日(2011.4.11)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成24年11月12日(2012.11.12)
【国際特許分類】
【出願日】平成23年4月11日(2011.4.11)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]