
車両へのコンテナの自動積み降ろし用光学装置
本発明は、コンテナ収容区域におけるコンテナの処理能力を高め、コンテナ輸送車両に対する積み降ろし時間を短縮する自動処理方法に関する。当該方法によれば、コンテナ輸送車を識別した後に、コンテナ収容区域の駐車区域に駐車されたコンテナ輸送車両の荷台が測定される。荷台の位置座標は、データ処理システムによって決定される。この荷台の位置座標を利用して、荷積みされるコンテナがクレーンによって自動的に位置決めされる。コンテナを荷台に対して正確に位置決めするために、荷台が再度測定され、その結果、コンテナの位置に対してずれがあれば、そのずれを用いて正確な位置決めがなされる。コンテナは、荷台に対して自動的に載置される。コンテナ輸送車両からの荷降ろしも実質的に同じステップにて行われる。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、規格コンテナ用のコンテナヤードで使われ物流管理用DPシステムにより操作可能なコンテナ用スタッカクレーンを使用して、コンテナヤードにおいて積み降ろしする方法に関するものであり、そのスタッカクレーンは各コンテナの格納先と、コンテナヤード内を移動できるコンテナ運搬車両の荷台との間を移動可能であり、そのときスタッカクレーンは荷台から又は荷台に収容および/または降ろすために懸架装置を有しており、この装置は荷台に対して方向を変えることができる。
【背景技術】
【0002】
コンテナヤードは、規格コンテナの一時的な収容庫であり、コンテナをある輸送手段から別の輸送手段へ移すことを可能にするためのものである。コンテナの輸送手段としては一般に大型コンテナ船、列車、トラック、トレーラ、あるいはAGV(自動案内車両)などがある。コンテナ積み降ろし港において、コンテナ船から降ろしたコンテナは、陸送されるまで一時的にコンテナヤードに保管される。逆方向ではコンテナが、コンテナ積み降ろし港のコンテナヤードに集められ、引き続いてコンテナ船に積み込まれる。陸送はトラック、トレーラ、列車あるいはAGVにより行われ、本願においては特にトラックで行われる。
【0003】
コンテナヤードにおいて扱われる多数のコンテナは、迅速かつ正確に輸送手段に対して積み降ろしをする必要がある。スタッカクレーンはコンテナをコンテナヤードから輸送車両へ、そしてその逆に運搬する。スタッカクレーンはコンテナ用自動スタッカクレーン(ACS)でもよいし、ガントリクレーン又は1足ガントリクレーンでもよい。現在は、コンテナを輸送手段に移動させるときにはスタッカクレーンを手動で操作している。スタッカクレーンは、ブリッジと、当該ブリッジ上を移動するトロリと、を有しており、ブリッジはレール上を移動する。クレーンに懸架しているコンテナの輸送車両への移動は、オペレータによって手動操作される。積載に際しては、駐車位置にいるオペレータがスタッカクレーンを使用してコンテナを輸送車両の近くまで移動させて、その後ゆっくり“動かして”コンテナを輸送車両に正確に配置する。配置に際しては、ACSを左右及び前後に繰り返し移動させる作業と、コンテナを下降させる作業とをオペレータがその場で操作し監視する。同様に、輸送車両からコンテナを降ろすときには、オペレータが手動でスタッカクレーンをゆっくりコンテナに近づけて、コンテナを収容する。
【0004】
多数のコンテナをコンテナヤード内で扱うにおいては、円滑、正確、迅速、経済的、かつ長期にわたる作業を必要とする。さらに、コンテナの処理量、つまり単位時間に処理するコンテナの数を増加させることが好ましい。これによってコンテナがコンテナヤードに保管される時間、コンテナ船に積載されるまでの時間、および陸送用輸送車両の滞在時間が短縮される。ひいては、コンテナの輸送時間を短縮することにもなる。
【発明の開示】
【0005】
本発明の課題は、コンテナヤードにおけるコンテナの処理能力を高め、コストを削減し、不具合による不稼働時間の短縮を達成する共に、コンテナヤードの収益性を向上させることにある。
【0006】
この課題は、輸送車両に規格コンテナを積載する本願の請求項1に記載の方法、規格コンテナを積載した輸送車両からコンテナを降ろす請求項2に記載の方法、およびスタッカクレーンの位置を調整する請求項17および19に記載の方法によって解決される。
【0007】
本発明の利点は、自動化によって可能となる、輸送車両に対する円滑な積み降ろし作業である。本発明において、積み降ろしにおける単純な繰り返し作業はいくつかのステップに分けられ、それぞれが自動化されている。一連の自動化作業は中断されないため手動操作による作業よりも時間短縮が可能であり、その正確な作業によっても積み降ろし作業の時間短縮が可能であることが利点であり、積み替えするコンテナの処理能力を高める。
【0008】
輸送車両へのコンテナの積載は請求項1に記載のステップa)〜f)に従って、段階に分けて行われる。これらのステップを実行することによって規格コンテナを輸送車両に積載する時間を短縮できるため、コンテナヤードにおける処理能力を高めることができる。各ステップの作業を自動化することによる個々の時間短縮が、結果として利益をもたらす積載作業全体の時間短縮につながる。また、作業ミスの回数が減少することによっても、同様に処理能力を高めることができる。
【0009】
輸送車両が認識されて発生したデータを物流管理用DPシステムに送信すると好ましい。同時に、物流管理用DPシステムはスタッカクレーンに積載又は荷降ろしの指示を出す。積載指示には、輸送車両に載せるために、スタッカクレーンがコンテナヤードに保管されているコンテナを持ち上げて輸送車両にコンテナを積載することを含んでいる。(一部削除)作業ステップを平行して行えるため、積み降ろし作業の時間を短縮できて、車両データを検知及び送信するときのミスを減少できる。
【0010】
さらに、校正カメラを使用して輸送車両の荷台上に明示した目印を検知し、その座標を物流管理用DPシステムに送信する。この目印から、DPシステムは、輸送車両の固定手段の座標を調べる(付属する座標システムが、スタッカクレーン懸架装置の固定手段の届く少なくとも一つの空間を決める)。この方法により、コンテナに対する固定手段の位置検知を迅速かつ正確に検知でき、輸送車両に対する積み降ろし時間を短縮することができる。
【0011】
物流管理用DPシステムが目印の座標と、DPシステムに保存されている積載コンテナのデータとを比較して、このコンテナ用の固定手段と、輸送車両の荷台上の位置座標を調べると好ましい。DPシステムに保存されているコンテナの寸法に応じた座標を、調べた輸送車両固定手段の座標とタイミングを合わせて比較する。輸送車両の荷台の寸法が積載されるコンテナに十分な寸法であれば、その輸送車両の固定手段が測定される。輸送車両の荷台が積載されるコンテナ用に充分大きくない場合には、積載作業/操作を早期に中断可能であり、あるいはスタッカクレーンによるコンテナヤードからのコンテナの運搬がタイミング良く中止可能であるため、かなりの時間節約ができる。
【0012】
固定手段の座標を正確に検出すると、駐車位置に配置された輸送車両への積載作業をすぐに始めることができる。そのために、スタッカクレーンはコンピュータ操作によって移動し、積載されるコンテナを輸送車両の荷台に正確に重なるように、位置座標上に運搬する。手動により“そこへ動かすこと”がなくなり、スタッカクレーンを輸送車両上に迅速かつ正確に配置することによって、積載作業時間が短縮される。
【0013】
荷台又はコンテナの固定手段が、スタッカクレーンに備えられた校正カメラによって検知された後、コンテナは必要に応じて、コンテナの固定手段が対応配置した荷台の固定手段の真上にくるように移動される。これにより、迅速でミスがなく正確に、コンテナを荷台の位置に対して合わせることができる。従来の方法のような、駐車位置にいるオペレータによるコンテナを“そこへ動かす” 時間のかかる作業が除外される。それにより、遠隔からオペレータの視覚による監視が少なくとも1台のカメラからの映像によって行えることが利点である。同じように、個々の作業ステップが間断なく続けて行われることによって、積み降ろし時間が短縮される。
【0014】
また、荷台に対してコンテナが正確に配置されるため、コンテナを輸送車両の荷台の上に降ろして、下降作業の最後にコンテナの固定手段を対応する荷台の固定手段にぴったりと係合させることができる。その場にいるオペレータの操作によるコンテナを吊るした懸架装置を“そこへ動かす”という欠点がなくなり、時間短縮が可能となる。コンテナが懸架装置により輸送車両の上に配置され、切り離される。スタッカクレーンによる積載作業は完了する。
【0015】
さらに、オペレータが積み降ろし作業の前後や作業中に現場にいる必要がないため、オペレータは他の作業もできるという利点がある。
【0016】
カメラシステムを使って輸送車両を認識すると、特に利点がある。目視及び手動による認識作業を除外したことにより、認識結果は物流管理用DPシステムへ迅速かつ正確に送信される。
【0017】
荷台目印の座標を検出するために、オペレータは物流管理用DPシステムのモニタのユーザ選択画面を使用して、画面上の荷台の目印をマーキング手段で選択する。ユーザ選択画面にはカメラシステムからの画像が表示される。オペレータがマーキング手段によってユーザ選択画面上に表示した輸送車両の荷台の目印を選択することで、輸送車両荷台の固定手段の座標を正確に検出して、迅速な計算を行うことができる。
【0018】
また、荷台目印の座標をコンピュータシステムにより自動的に検出して、物流管理システムへ送信することにより、更に積み降ろし時間を短縮できる自動化を実現できる。
【0019】
請求項1に記載の位置座標を決定するステップは、異なる2つの方法によって実現可能である。1つは、積み降ろし区域において輸送車両の荷台座標を検出する方法が好ましい。このとき輸送車両はすでに認識されており、積載されるコンテナも積載指示で決まっている。これによって、物流管理用DPシステムは、積載されるコンテナを輸送車両が収容可能かどうかを早期に判断できる。輸送車両荷台の固定手段が正常に認識されれば、積載作業が続行され、認識されなければ、積載作業が開始されていた場合には、中止される。
【0020】
輸送車両荷台の座標が最終的に積み降ろし区域において検出されると、荷台の高さ(一部削除)及び荷台目印の対角線の交点により表示される位置座標は、コンテナの絶対目標位置となる。それにより位置調整は特に巧妙となり、迅速に短時間で、コンテナを積んだ自動スタッカクレーンを積載する荷台上に配置することができる。
【0021】
同様に好ましいのは、位置座標を調べるための請求項1に記載しているステップの本願による別の構成である。このとき、輸送車両荷台の座標は認識区域において検出される。これによって、物流管理用DPシステムは、輸送車両がコンテナを収容可能かどうかを早期に判断できる。輸送車両の荷台の固定手段が正しい位置にあると、積載作業が続行され、その他の場合には、積載作業が開始されていた場合でも中止される。
【0022】
輸送車両荷台の座標検知が認識区域で行われるので、検知した荷台の座標は輸送車両に関するものである。このため、荷台の高さと、荷台の目印を結ぶ対角線の交点とはコンテナの相対目標位置となる。
【0023】
認識区域において検出された荷台の位置座標は輸送車両のみに関する座標であるため、コンテナの相対目標位置となる。この位置座標を、カメラを使って調べた駐車位置に配置の輸送車両座標に、コンテナの相対目標位置を重ねたコンテナの絶対目標位置により示すと好ましい。認識区域においてあらかじめ検出された座標は、物流管理用DPシステムによって、駐車位置において認識された輸送車両の位置と比較される。この比較結果が、コンテナの絶対目標位置となる位置座標である。この結果、後述するように、巧妙にかつ短時間で、コンテナを積んだ自動スタッカクレーンを積み降ろしする荷台上に配置することができる。
【0024】
座標を検出する場所に関係なく、一つまたは複数の固定手段の位置が誤っていればDPシステムのユーザ選択画面で明らかになる。オペレータがそれに気づいて、輸送車両の運転手に連絡する。運転手が固定手段位置の不時のミスをタイミング良く修正する。
【0025】
座標を検出するどちらの方法においても、位置座標を好ましく選択することにより、コンテナ固定手段を結ぶ対角線の交点が荷台固定手段の対角線を結ぶ交点の真上に来るように、懸架装置がコンテナを荷台の届く範囲に移動することが可能になる。従って、スタッカクレーンから吊るされたコンテナは荷台の真上に配置された後、場合によっては次にステップにおいて懸架装置から吊るされたコンテナの回転によって方向を変えねばならない。このときスタッカクレーンが移動する必要はなく、すなわち、ACSのブリッジと、その上を移動するトロリはすでに積載位置にある。懸架装置をオペレータが操作して少しずつ動かす作業は除外されることが利点である。この結果、懸架装置の位置調整が非常に簡易化されるため、積み降ろしに必要な時間を大幅に短縮することができる。
【0026】
オペレータによる積み降ろし作業のコントロールは、各1対の固定手段を表示する4分割された第二ユーザ選択画面によって簡易化され、そのときその対は、カメラシステムの画像から切り取られた荷台の固定手段、およびコンピュータ計算したコンテナを含めた固定手段の輪郭を画面上で重ねたコンテナの対応する固定手段で構成している。これによって、オペレータは駐車位置にいなくても、積み降ろし作業をコントロールすることができる。
【0027】
さらに、本発明において、物流管理システムの第2のユーザ選択画面はマーキング手段を有しており、オペレータは荷台上の目印を1つ以上選択できる。これにより、場合によっては発生する積載コンテナと荷台位置のずれを、精密位置決めするために物流管理用DPシステムによって決めることができるという利点がある。そのようにして調べた正確な荷台の配向が、荷台に対するコンテナ位置決めのために必要である。物流管理用DPシステムによってずれが認識されると、次のステップにおいて、コンテナが位置調整される。荷台の位置を容易に検知すること、また物流管理用DPシステムのデータを直接利用してデータの誤りを排除することによって、特に大きく作業時間を短縮できる。
【0028】
同じく本発明の構成において、積載されるコンテナと荷台の位置の、場合により発生するずれを、精密位置決めのためにコンピュータシステムによって自動的に認識できるという利点がある。
【0029】
積載されるコンテナと荷台の位置にずれがあった場合、コンテナの固定手段が荷台の固定手段の真上に配置されるように、コンテナは回転される。このように、コンテナを荷台に対して迅速かつ正確に方向転換させる作業は、コンピュータによって計算されたずれに基づいて自動的に行われる。例えば平坦でない地面において輸送車両がその縦方向及び/又は横方向に傾いても、積み降ろし作業に悪影響を及ぼさない、という大きな利点がある。コンテナを積んだ懸架装置を荷台に対して少しずつ動かす作業が除外されるため、輸送車両への積み降ろしに必要な時間を極端に短縮できる。
【0030】
懸架装置からコンテナを離して積載する作業は、オペレータの操作あるいはコンピュータシステムによって自動的に行われる。コンテナが荷台の真上に配置されて正確に位置調整されると共に、DPシステムが荷台の高さを決めるので、コンテナが配置される作業は迅速かつ連続的に行われ、手動による作業よりも早く完了させることができる。コンテナの積載作業は、コンテナと荷台の固定手段が係合すると完了する。懸架装置からコンテナが降ろされて圧力センサがそれを表示すると、コンテナは懸架装置から離されて輸送車両に固定される。
【0031】
コンテナを積載した輸送車両から降ろす作業は請求項2に記載の一連のステップa)〜f)で記載している。これらのステップを実行することによって規格コンテナ用輸送車両から降ろす時間を短縮できるため、コンテナヤードにおける処理能力を高めることができる。作業を自動化することによる各ステップの時間短縮が、結果として荷降ろし作業全体の時間短縮につながる。また、作業ミスの回数が減少することによっても、同様に処理能力を高めることができる。
【0032】
輸送車両および降ろすコンテナを認識し、それにより発生したデータを物流管理用DPシステムに送信すると、利点がある。同時に、物流管理用DPシステムはスタッカクレーンに荷降ろしの指示を出す。この荷降ろし指示には、降ろすコンテナを輸送車両から取り上げて、これをコンテナヤードに保管する業務が含まれている。作業ステップを平行して行えることによる時間的なメリットにより、荷降ろし作業の時間を短縮できて、車両データ、コンテナデータを検知及び送信するときのミスも減少できる。
【0033】
さらに、校正カメラを使用してコンテナに明示した目印を検知し、その座標を物流管理用DPシステムに送信する、と有用である。DPシステムが、この目印から荷降ろしするコンテナ固定手段の座標を調べる(付属する座標システムは、荷物収容装置の固定手段の届く少なくとも一つの空間を示す)。この方法により、コンテナ固定手段の位置を迅速かつ正確に検知でき、それにより輸送車両での荷降ろし時間を短縮することができる。
【0034】
物流管理用DPシステムが目印からコンテナの固定手段と位置座標を調べると、非常に利点がある。これにより、迅速かつ正確に位置座標を計算し、輸送車両の荷降ろし作業をすぐに始めることができる。
【0035】
そのために、スタッカクレーンはコンピュータ操作によってコンテナ上方に、位置座標上に重なるように移動する。懸架装置を迅速かつ正確に荷降ろしするコンテナ上に配置することによりは、手動で“動かす”操作がなくなって、荷降ろし作業時間が短縮される。
【0036】
スタッカクレーンに備えた校正カメラを使って、コンテナの固定手段を検知し、場合によっては、対応配置したコンテナの固定手段の真上にくるように、懸架装置の固定手段を移動する。これにより、収容するコンテナに対して懸架装置を迅速でミスがなく正確に合わせることができる。従来の方法と比較して、駐車位置にいるオペレータによる時間のかかる懸架装置の“そこへ動かす”作業がなくなる。それにより少なくとも1台のカメラの映像を見るオペレータにより、外観的なコントロールを行えるという利点がある。同じように、個々の作業ステップが間断なく続けて行われることによって、荷降ろし時間が短縮される。
【0037】
コンテナに対して懸架装置の固定手段を迅速に正確に配向することにより、懸架装置はコンテナの所に、懸架装置の固定手段がコンテナの固定手段にぴったりと係合するように移動することができる。オペレータの操作によりコンテナの所に懸架装置を“そこへ動かす”という欠点がなくなり、利点として時間短縮が可能となる。コンテナが輸送車両により解かれて、懸架装置により荷降ろしされ、引き続いてコンテナヤードで保管される。これにより、スタッカクレーンによる荷降ろし作業は完了する。
【0038】
オペレータが荷降ろし作業の前後や作業中に現場にいる必要のないことが、特に利点をもたらす。それによりオペレータは他の作業もできる。
【0039】
カメラシステムを使って輸送車両および荷降ろしするコンテナを認識すると、特に利点がある。目視及び手動による認識作業がなくなることにより、発生したデータは迅速かつ正確に物流管理用DPシステムへ送信される。
【0040】
コンテナ目印の座標を検出するために、オペレータは物流管理用DPシステムのモニタのユーザ選択画面を使用して、画面上のコンテナの目印をマーキング手段で選択する。ユーザ選択画面にはカメラシステムからの画像が表示される。オペレータがマーキング手段によってユーザ選択画面上に表示されたコンテナの目印を選択することで、輸送車両荷台の固定手段の座標を正確に検出して、迅速に計算を行うことができる。
【0041】
さらに、コンテナ目印の座標をコンピュータシステムにより自動的に検出して、物流管理システムへ送信することにより、更に荷降ろし時間を短縮できる自動化を実現できる。
【0042】
位置座標を決定する請求項2に記載のステップは、異なる2つの方法によって実現可能である。1つは、積み降ろし区域においてコンテナ座標を検出すると利点がある。コンテナ目印にある上端の竪方向位置により、そして荷台目印の対角線交点により決められる位置座標はコンテナの絶対目標位置となる。それにより配置が巧妙なものとなり、懸架装置のついた自動スタッカクレーンを積み降ろしするコンテナ上方に、迅速そしてそれにより時間を節約して位置決めすることができる。
【0043】
本発明において同じく利点があるのは、位置座標を調べるための請求項2に記載のステップの別の構成である。このときコンテナ座標の検知は認識範囲で行われる。位置座標は、コンテナ目印にある上端の竪方向位置により、そして荷台目印の対角線交点により決められ、それがコンテナの相対目標位置となる。位置座標要素として、コンテナの目印(固定手段)の上端を選択することにより、オープントップコンテナ、タンクコンテナおよび/またはフラットコンテナのような、コンテナの天井のない規格コンテナも荷降ろしすることができる。よって、位置座標を都合良く選択することで、以下に述べる荷降ろしするコンテナの上方で自動スタッカクレーンを、巧みに、そしてそれにより時間を節約する位置決めができる。
【0044】
識別区域で検知したコンテナ座標は輸送車両に関するものであり、従って懸架装置の相対目標位置を示す。位置座標を懸架装置の絶対目標位置により示すと好ましく、それは、カメラを使って調べた駐車位置にある輸送車両の座標と懸架装置の相対目標位置を合わせたものである。既に識別区域を検知した座標は、物流管理用DPシステムにより駐車位置で検知した輸送車両の位置と結合される。この結合結果が、懸架装置の絶対目標位置である位置座標である。これにより、荷降ろしするコンテナ上で後述する巧妙でそれにより時間を節約する自動スタッカクレーンの位置決めができる。
【0045】
座標を検知するために選択した方法とは関係なく、位置座標のメリットある選択により、懸架装置の固定手段の対角線交点がコンテナ固定手段の対角線交点の真上にくるように、懸架装置をコンテナの到達範囲に移動することが可能になる。それにより、懸架装置はコンテナ上の中央にきて、そこで場合によっては以下のステップで懸架装置を回転運動させることにより方向を合わせることになる。そのために、スタッカクレーンを移動される必要がない、すなわちACSのブリッジとその上を走行するトロリは、既に正確にその最終的な荷降ろし位置に到達している。オペレータが懸架装置を操作してステップ的に動かすことがなくなる利点がある。この方法によりスタッカクレーンの位置決めが極端に簡単になり、それにより必要な荷降ろし時間が大幅に削減される。
【0046】
オペレータによる荷降ろし作業のコントロールが、各1対の固定手段を表示する4分割の第二ユーザ選択画面によって簡易化され、そのときその対は、懸架装置にあるカメラシステムの画像から切り取られたコンテナの固定手段、および懸架装置とその固定手段を画面上でコンピュータ計算した輪郭を重ねて切り取った懸架装置の対応する固定手段で構成している。これによって、オペレータは駐車位置にいなくても、積み降ろし作業をコントロールすることができる。
【0047】
本発明においては、物流管理システムの第2のユーザ選択画面は、オペレータが少なくとも1つのコンテナの目印を選択するマーキング手段を有していることにより、場合によって発生する積載コンテナと荷台位置のずれを、精密位置決めするために物流管理用DPシステムで決めることができるという大きな利点がある。そのようにして調べた正確な荷台の配向が、懸架装置に対するコンテナの配向のために必要である。物流管理用DPシステムによってずれが認識されると、次の作業ステップにおいて懸架装置の固定手段が正しく設定される。コンテナの位置を容易に検知すること、物流管理用DPシステムのデータを直接利用できること、そしてデータの誤りが減ることにより、特に大きく作業時間を短縮できる。
【0048】
同じく本発明の構成においては、荷降ろしするコンテナ位置に対する懸架装置位置の、場合により発生するずれを、微調整のためにコンピュータシステムによって自動的に認識すると好ましい。
【0049】
荷降ろしするコンテナに対する懸架装置の位置にずれがあった場合、懸架装置の固定手段がコンテナの固定手段の真上にくるように、懸架装置が回転される。それにより、コンテナに対して懸架装置を迅速かつ正確に配向する作業は、コンピュータによって計算されたずれに基づいて自動的に行われる。コンテナに対して懸架装置を少しずつ動かす作業がなくなるので、輸送車両の荷降ろしに必要な時間を極端に短縮できる。
【0050】
コンテナを収容して固定手段をぴったりと係合するまで懸架装置を迅速に連続的に動かす作業は、オペレータの操作あるいはコンピュータシステムによって自動的に行われる。懸架装置が正確にコンテナの上方にきて正確に位置調整されると共に、DPシステムがコンテナの竪方向位置を決めるので、懸架装置を遅滞なく連続して動かすことができ、手動で“動かす”よりも早く完了することができる。コンテナの収容作業は、懸架装置とコンテナの固定手段が係合すると完了する。コンテナを懸架装置に固定し、そしてスタッカクレーンがそれをコンテナヤードに仮保管する。それにより荷降ろし作業が完了する。
【0051】
一連の作業ステップによって、輸送車両に対する積み降ろし作業時間が早くなり、このようにして節約された時間は次の積み降ろし作業に利用することができる。したがって、コンテナヤードのコンテナ処理能力が高まり、効率アップが図られ、貨物輸送の時間短縮が可能になる。
【0052】
さらに、請求項17に記載の方法によって、スタッカクレーンの調整を常時、低費用で行えるという利点がある。スタッカクレーン用のカメラにおいて、構造部品公差、製造公差、レンズの不均質、及び/又は光学的誤差によって幾何学的偏差が生じるが、カメラを使用する前に校正することで回避される。スタッカクレーン用のカメラからの画像は、校正による補正アルゴリズムによって、操作中に常に修正される。カメラ固有の補正アルゴリズムが、物流管理用DPシステムによるカメラの各画像に適用される。したがって、各補正アルゴリズムの適用の下で、各カメラは所定の光学特性を持つことになる。さらに、使用前に校正することよって物流管理用DPシステムは、観察され既知の対象物の間隔を光学の法則に従って測定できる。
【0053】
この校正カメラを使用して、スタッカクレーンの位置調整を行える。請求項17によれば、スタッカクレーンはまずコンテナヤード内の任意の位置に配置された参照点に移動して、カメラシステムのうち1台以上のカメラが参照点をとらえるようにする。物流管理用DPシステムはカメラの画像から計算した新しい参照点の位置と、既知の参照点の位置とを比較して、誤差を発見した場合はスタッカクレーンのずれを測定する。参照点は通常移動しないので、物流管理用DPシステムによって計算されたスタッカクレーンの位置にずれの分を足して、スタッカクレーンの位置座標を修正できる。この方法は、コンテナ用自動スタッカクレーン(ACS)のレールの長さが、夏季や冬季の温度変化による膨張や縮小によって変わった場合などに有効である。物流管理用DPシステムは、スタッカクレーンの絶対移動距離によってその位置を計算するが、温度変化やスタッカクレーンが実際に移動した距離などを考慮して、物流管理用DPシステムによって計算された位置と置き換えることができる。これによって、様々な要因によって実際の位置と異なって計算されたスタッカクレーンの位置を修正することができるという利点がある。この方法によって、いつでも所望のときに頻繁にスタッカクレーンをすぐに調整できるという特別の利点がある。
【0054】
コンテナヤード内に複数の参照点を設ける、と特に利点がある。スタッカクレーンを1つの参照点上に配置した後、物流管理用DPシステムはデータ内の参照点の位置と、カメラの画像から新たに計算された位置とを比較して、参照点に対するスタッカクレーンのずれを計算する。複数の参照点がスタッカクレーンの移動線上に配置されている状態で、狭い時間領域内で1つの参照点に見られるずれが偶然誤差であった場合、その参照点の近傍において地面の変形があることを指している。これを考慮して、物流管理用DPシステムはスタッカクレーンの位置計算を修正する。この結果、膨張による誤差の発生を避けることができる。
【0055】
コンテナヤード内に超参照点を設けて、これに対してスタッカクレーンのカメラを調整する、と特に利点がある。技術的欠陥などによってスタッカクレーンのカメラを取り替えた場合に、スタッカクレーンで新しいカメラの初期調整をする必要がある。超参照点を使用することによって、物流管理用DPシステムにより、修正軌道をスタッカクレーンの新しいカメラに対して決定する。この方法によって、修理及び調整にかかる時間と、それによるスタッカクレーンの作業中断時間を短縮できるという利点がある。超参照点をコンテナヤード内の、上記したような外的影響を受けない場所に設けると好ましい。スタッカクレーンは、校正された新しいカメラを備えられて超参照点の上に移動し、新しいカメラがそれを検知するようにする。DPシステムは超参照点の位置を測定し、データ内の超参照点の位置と比較する。誤差があれば、修正軌道を新しいカメラに適用し、このカメラに基づいて行う位置計算に使用する。スタッカクレーンの新しいカメラを迅速に調整することによって節約された時間を、積み降ろし作業に利用することができる。
【発明を実施するための最良の形態】
【0056】
図1は、コンテナ1用の自動コンテナターミナル24を示している。このターミナルの陸側で、コンテナ1がトラック7(図2参照)に積み下ろしされる。認識区域25では、出入りするトラックが認識及び/又は測定される。到着したトラック7は認識されて、積み降ろしに必要なデータが物流管理用DPシステム(図示せず)に送信される。この後、トラック7は車道26を通過して積み降ろし区域6へ移動する。
【0057】
図2は、認識区域25に設けられてトラック7をあらゆる方向から感知するカメラ27を示している。トラック7のプレートナンバ28場合によってはトレーラ7.1のプレートナンバ29がカメラ27に検知される。同様に、トラック7に積荷がある場合にはコンテナ1の識別番号30も検知される。トラック7、トレーラ7.1、場合によってはコンテナ1に関するあらゆる情報が物流管理用DPシステムに送信されて、システム上で常時利用可能となり、オペレータ(図示せず)が検索できるようになる。
【0058】
図3及び4に示すように、自動コンテナヤード2にコンテナ1が積み重ねられて収容される。自動スタッカクレーン3はブリッジ3.1上を移動する可動トロリ3.2を有しており、ブリッジ3.1はクレーン軌道4上を移動する。積み降ろし作業において、コンテナ1は可動トロリ3.2の可動マスト3.3にしっかりと連結される。可動マスト3.3には、自動スタッカクレーン3の懸架装置3.4が備えられ、コンテナを収容する。自動スタッカクレーン3は物流管理用DPシステムに接続されて、可動区域内のあらゆる座標にいつでも移動可能である。座標システム(図示せず)は、自動スタッカクレーン3の懸架装置3.4が移動した位置を表示する。自動スタッカクレーン(ACS)に代えて、ガントリクレーンあるいは1足ガントリクレーンを使用してもよい。
【0059】
自動コンテナヤード2は、柵又は壁の仕切5によって積み降ろし区域6から区切られている。積み降ろし区域6において、トラック7はそれぞれ駐車位置8に配置される。図3及び4は、指示された駐車位置8に後ろ向きに入ったトラック7を示している。駐車位置8はコンクリート溝8.1を両側に有しており、トラック7の車輪9をガイドしてトラック7が容易に後ろ向きに駐車できるようにする。トラック7がバックして、駐車位置8を区切る車止め8.2に車輪9が当たると駐車作業は完了する。
【0060】
各駐車位置8には、固定校正カメラ10が仕切5の上に取り付けられている(図5参照)。トラック7の荷台31全体と荷台上のコンテナ1を完全に検知するように、カメラ10の視野角11は選択する。このカメラ10の視野角11によって、モニタ12(図6参照)においてオペレータは駐車作業を観察することができる。
【0061】
図6は、モニタ12で見たカメラ10の映像を示している。この映像によってオペレータは、トラック7の駐車作業及び積み降ろし作業を観察して操作することができる。駐車位置8でトラック7に積載するために、トラック7の荷台31の位置を測定せねばならない。そのために、十字カーソル14などのマーキング手段がカメラ10の映像に重ねられ、オペレータはそれで目印を選択する。この目印は、トラック7の荷台31の固定手段、いわゆるツイストロック13である。ツイストロック13の座標が物流管理用DPシステムに送信される。そのとき、物流管理用DPシステムはツイストロック13をつなぐ対角線16及びこの対角線の交点17を計算する。交点17は座標システムにおける荷台の高さ15を示す。この計算は、正確な位置及び視野方向が分かっている固定設置カメラ10を予め校正することによって可能となる。
【0062】
図7に示すように、スタッカクレーン3の固定マスト3.3に連結されたコンテナ1は、コンテナ1の固定手段をつなぐ対角線の交点が、トラック7の荷台31の固定手段をつなぐ対角線16の交点17の真上に位置するように、トラック7の荷台31の上に配置される。図8に示すように、スタッカクレーン3に設けられたカメラ18により、荷台31上に積むコンテナ1の位置の方法により、カメラ18の視野角19は限定される。20フィート、30フィート、40〜45フィートの異なる寸法のコンテナに応じて、視野角19.1及び19.2がコンテナ1の中心部を除いた左右に必要となる。すなわち、荷台31における対角線16の交点17の座標から後部へ3m〜7mの範囲のカメラ視野42.1と、前部へ3m〜7mのカメラ視野42.2が必要である。コンテナ1に適する荷台31のツイストロック13はこの範囲のみである。
【0063】
図9は、物流管理用DPシステムにおける4分割ユーザ選択画面20を示している。各分割画面は、スタッカクレーン3に備えられた複数のカメラ18のうちの少なくとも1台で撮影された分割画面を表示する。無駄を避けるとともに、信頼性を高めるため、4分割画面は1台のカメラからの、または2台のカメラによる2つの映像からの4つの分割映像を表示してもよい。また同様に、各分割画面に対してそれぞれ1台のカメラを設置してもよい。各分割画面はそれぞれ、荷台31の固定手段であるツイストロック13を表示する。オペレータがツイストロック22の位置のずれを発見するとインターコムを使用して、トラック7の運転手にその位置を修正するように告げる。コンピュータによって計算されたコンテナの輪郭23が画面上に重ねられ、コンテナ1の現在の位置をオペレータに示す。荷台31に対するコンテナ1の配向は、オペレータが十字カーソル24などのマーキング手段を使用して、荷台31の固定手段であるツイストロック13を選択し直すことで修正される。荷台31の固定手段の座標が再び物流管理用DPシステムに送信されて、荷台31の現在の配向が計算される。コンテナ1と荷台31の配向の、場合によって存在するずれが物流管理用DPシステムによって計算されると、マスト3.3のところでコンテナ1は懸架装置3.4によって、コンテナ1の固定手段が全て荷台31の固定手段の真上に位置するように、回転される。
【0064】
図10に示すように、下降作業を始めるときにコンピュータによって計算されたコンテナの輪郭23の上に、下降作業の間中ずっと新たに計算された輪郭が重ねられる。下降作業の最後には、コンテナ1の固定手段がトラック7の荷台31の固定手段に係合する。コンテナ1が配置される際、オペレータはその積載作業をモニタで観察して操作する。
【0065】
図11〜13に、トラック7の荷台31又はコンテナ1の目印を検出する他の方法が示されている。ここでは、前述した方法の作業の順序を並べ替えて示している。
【0066】
図11は、変形例において、場合によってはコンテナ1を積んで到着したトラック7を認識する認識区域25を示している。輸送車両用のナンバープレート28、29と場合によってコンテナ1の識別番号30とを認識区域25に備えられたカメラ27によって検知して、トラック7の認識をする。カメラは物流管理用DPシステムに接続されており、データを送信する。ここで図2に示す作業に加えて、トラック7の場合によって存在するコンテナ1及び/又は空の荷台31が測定される。トラック7は側面32及び上部(上面)33からカメラ27によって検知される。図6に示すような荷台31(又はコンテナ1)の目印の検出を、図6と較べて積み降ろし区域6では行わずに認識区域25で行う。目印の検出方法は前述と同様である。また、固定手段の高さ34、35の自動測定もカメラ27によって行われる。検出されてDPシステムに送信された座標はこのトラック7のみに関する座標であるため、荷降ろしされるコンテナの相対目標位置となる。トラック7に対する一連の認識及び測定作業の後、トラック7の運転手は磁気カード又はICカード(図示せず)による入庫許可証を得る。磁気カードは、作業指示に関するデータも含んでいる。
【0067】
次に、運転手は指示された積み降ろし区域6(図12)にトラック7を移動させ、輸送車両を積み降ろし区域6の任意の駐車位置8に後ろ向きに入れる。図13に示すように、駐車作業の間、物流管理用DPシステムにおいて、駐車位置8に備えられたカメラ36によって認識作業が始められる。この認識作業においてトラック7は認識されると共に、座標システムにおいて幾何学的に分類される(記述せず)。仕切5に備えられたカメラ36からの情報によって、物流管理用DPシステムはトラック7を識別すると共にその位置、つまり、仕切5からの距離37、駐車位置8内の左右の隙間、地面38に対するトラック7のズレ角度を正確に認識することができる。そのため、駐車作業を終えた後には、トラック7の正確な位置は物流管理用DPシステムに把握されている。上記で得た荷台の座標及びコンテナ1の相対目標位置を考慮して、物流管理用DPシステムは積載されるコンテナ1の位置座標を決定する。この位置座標は、積載されるコンテナの絶対目標座標を示している。
【0068】
次に、トラック7の運転手は報告区域39に移動し、磁気カードを使用して、トラック7の積み降ろし準備完了の信号を送る。DPシステムは磁気カードのデータと、トラックが入庫した駐車位置8からのデータとを比較して、一致するとスタッカクレーン3へ指示を出す。スタッカクレーン3は積載されるコンテナ1をコンテナヤード2から選んで図7に示す方法でトラック7への積載を開始する。
【0069】
さらに、図12は許容範囲40を示している。安全上の理由から、各駐車位置8内においてスタッカクレーン3の懸架装置3.4は、この許容範囲40内のみで移動可能である。
【0070】
図14は、参照点41を備えたコンテナヤード2を示している。
【図面の簡単な説明】
【0071】
【図1】コンテナターミナルの概略図である。
【図2】輸送車両を検知する認識区域を示す図である。
【図3】コンテナターミナル、コンテナヤード及び駐車位置を示す図である。
【図4】図3が示す区域の側面図である。
【図5】駐車位置に設置されたカメラの視野角を示す図である。
【図6】第1のユーザ選択画面を示す図である。
【図7】自動コンテナクレーンに備えられたカメラの視野角を示す図である。
【図8】自動コンテナクレーンに備えられたカメラの視野角を示す図である。
【図9】第2のユーザ選択画面の、積載作業中の状態を示す図である。
【図10】ユーザ選択画面の、積載作業完了間際の状態を示す図である。
【図11】目印の検出方法の他の実施例を示す図である。
【図12】他の実施例におけるコンテナターミナル、コンテナヤード、及び駐車位置を示す図である。
【図13】他の実施例における、駐車位置に備えられたカメラの視野角を示す図である。
【図14】参照点の配置を示す図である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、規格コンテナ用のコンテナヤードで使われ物流管理用DPシステムにより操作可能なコンテナ用スタッカクレーンを使用して、コンテナヤードにおいて積み降ろしする方法に関するものであり、そのスタッカクレーンは各コンテナの格納先と、コンテナヤード内を移動できるコンテナ運搬車両の荷台との間を移動可能であり、そのときスタッカクレーンは荷台から又は荷台に収容および/または降ろすために懸架装置を有しており、この装置は荷台に対して方向を変えることができる。
【背景技術】
【0002】
コンテナヤードは、規格コンテナの一時的な収容庫であり、コンテナをある輸送手段から別の輸送手段へ移すことを可能にするためのものである。コンテナの輸送手段としては一般に大型コンテナ船、列車、トラック、トレーラ、あるいはAGV(自動案内車両)などがある。コンテナ積み降ろし港において、コンテナ船から降ろしたコンテナは、陸送されるまで一時的にコンテナヤードに保管される。逆方向ではコンテナが、コンテナ積み降ろし港のコンテナヤードに集められ、引き続いてコンテナ船に積み込まれる。陸送はトラック、トレーラ、列車あるいはAGVにより行われ、本願においては特にトラックで行われる。
【0003】
コンテナヤードにおいて扱われる多数のコンテナは、迅速かつ正確に輸送手段に対して積み降ろしをする必要がある。スタッカクレーンはコンテナをコンテナヤードから輸送車両へ、そしてその逆に運搬する。スタッカクレーンはコンテナ用自動スタッカクレーン(ACS)でもよいし、ガントリクレーン又は1足ガントリクレーンでもよい。現在は、コンテナを輸送手段に移動させるときにはスタッカクレーンを手動で操作している。スタッカクレーンは、ブリッジと、当該ブリッジ上を移動するトロリと、を有しており、ブリッジはレール上を移動する。クレーンに懸架しているコンテナの輸送車両への移動は、オペレータによって手動操作される。積載に際しては、駐車位置にいるオペレータがスタッカクレーンを使用してコンテナを輸送車両の近くまで移動させて、その後ゆっくり“動かして”コンテナを輸送車両に正確に配置する。配置に際しては、ACSを左右及び前後に繰り返し移動させる作業と、コンテナを下降させる作業とをオペレータがその場で操作し監視する。同様に、輸送車両からコンテナを降ろすときには、オペレータが手動でスタッカクレーンをゆっくりコンテナに近づけて、コンテナを収容する。
【0004】
多数のコンテナをコンテナヤード内で扱うにおいては、円滑、正確、迅速、経済的、かつ長期にわたる作業を必要とする。さらに、コンテナの処理量、つまり単位時間に処理するコンテナの数を増加させることが好ましい。これによってコンテナがコンテナヤードに保管される時間、コンテナ船に積載されるまでの時間、および陸送用輸送車両の滞在時間が短縮される。ひいては、コンテナの輸送時間を短縮することにもなる。
コンテナヤードにおいて規格コンテナを扱う公知の方法が下記特許文献1に開示されている。このコンテナヤードは、コンテナの収容庫と、コンテナ用の荷台を備えた輸送車両との間を移動できる、操作可能なコンテナ用スタッカクレーンを有している。このスタッカクレーンは、コンテナを荷台に降ろすため及び荷台から持ち上げるための保持手段を備えており、この保持手段はコンテナ及び荷台に対して方向を変えることができる。またスタッカクレーンは、持ち上げ手段を備えた水平に移動するトロリを有しており、そこからコンテナの保持手段が懸架されている。この懸架装置にはビデオカメラシステムがセンサとして備えられており、自動的に懸架装置をコンテナの上に下げたり、あるいはコンテナを荷台から持ち上げたりできるようにする。さらに、第2のセンサとしてのビデオカメラシステムも懸架装置に備えられており、スタッカクレーンを調整するために使用される。この調整の参照点となる光学装置を備えた壁が、輸送車両の駐車区域内に備えられている。
さらに、コンテナ用の懸架装置を配向させる公知のシステムが下記特許文献2に開示されている。懸架装置はスプレッダとして設計されており、コンテナの角にこのスプレッダを固着するためのツイストロック内にCCDカメラを有している。カメラから得られるビデオ信号によって、オペレータはこのスプレッダをコンテナ上の正しい位置に配置することができる。このシステムはDPシステムに接続して自動的に作動させることも可能である。
【特許文献1】欧州特許公開EP1043262
【特許文献2】国際特許公開WO01/81233
【発明の開示】
【0005】
本発明の課題は、コンテナヤードにおけるコンテナの処理能力を高め、コストを削減し、不具合による不稼働時間の短縮を達成する共に、コンテナヤードの収益性を向上させることにある。
【0006】
この課題は、輸送車両に規格コンテナを積載する本願の請求項1に記載の方法、規格コンテナを積載した輸送車両からコンテナを降ろす請求項2に記載の方法、およびスタッカクレーンの位置を調整する請求項16及び18に記載の方法によって解決される。
【0007】
本発明の利点は、自動化によって可能となる、輸送車両に対する円滑な積み降ろし作業である。本発明において、積み降ろしにおける単純な繰り返し作業はいくつかのステップに分けられ、それぞれが自動化されている。一連の自動化作業は中断されないため手動操作による作業よりも時間短縮が可能であり、その正確な作業によっても積み降ろし作業の時間短縮が可能であることが利点であり、積み替えするコンテナの処理能力を高める。
【0008】
輸送車両へのコンテナの積載は請求項1に記載のステップa)〜f)に従って、段階に分けて行われる。これらのステップを実行することによって規格コンテナを輸送車両に積載する時間を短縮できるため、コンテナヤードにおける処理能力を高めることができる。各ステップの作業を自動化することによる個々の時間短縮が、結果として利益をもたらす積載作業全体の時間短縮につながる。また、作業ミスの回数が減少することによっても、同様に処理能力を高めることができる。
輸送車両からコンテナを降ろす作業は請求項2に記載のステップa)〜f)に従って、段階に分けて行われる。これらのステップを実行することによって規格コンテナを輸送車両から降ろす時間を短縮できるため、コンテナヤードにおける処理能力を高めることができる。作業を自動化することによる各ステップの時間短縮が結果として荷降ろし作業全体の時間短縮につながる。また、作業ミスの回数が減少することによっても、同様に処理能力を高めることができる。
【0009】
本発明の方法において、輸送車両とコンテナとが認識されて発生したデータを物流管理用DPシステムに送信すると好ましい。同時に、物流管理用DPシステムはスタッカクレーンに積載又は荷降ろしの指示を出す。積載指示には、輸送車両に載せるために、スタッカクレーンがコンテナヤードに保管されているコンテナを持ち上げて輸送車両にコンテナを積載することを含んでいる。荷降ろし指示は、スタッカクレーンが輸送車両上のコンテナを持ち上げてコンテナヤードに保管することを含んでいる。作業ステップを平行して行えるため、積み降ろし作業の時間を短縮できて、車両データを検知及び送信するときのミスを減少できる。
【0010】
さらに、校正カメラを使用して輸送車両の荷台上に明示した目印を検知し、その座標を物流管理用DPシステムに送信する。この目印から、DPシステムは、輸送車両の固定手段の座標を調べる(付属する座標システムが、スタッカクレーン懸架装置の固定手段の届く少なくとも一つの空間を決める)。この方法により、コンテナに対する固定手段の位置検知を迅速かつ正確に検知でき、輸送車両に対する積み降ろし時間を短縮することができる。
【0011】
物流管理用DPシステムが目印の座標と、DPシステムに保存されている積載コンテナのデータとを比較して、このコンテナ用の固定手段と、輸送車両の荷台上の位置座標を調べると好ましい。DPシステムに保存されているコンテナの寸法に応じた座標を、調べた輸送車両固定手段の座標とタイミングを合わせて比較する。輸送車両の荷台の寸法が積載されるコンテナに十分な寸法であれば、その輸送車両の固定手段が測定される。輸送車両の荷台が積載されるコンテナ用に充分大きくない場合には、積載作業/操作を早期に中断可能であり、あるいはスタッカクレーンによるコンテナヤードからのコンテナの運搬がタイミング良く中止可能であるため、かなりの時間節約ができる。
【0012】
固定手段の座標を正確に検出すると、駐車位置に配置された輸送車両への積載作業をすぐに始めることができる。そのために、スタッカクレーンはコンピュータ操作によって移動し、積載されるコンテナを輸送車両の荷台に正確に重なるように、位置座標上に運搬する。手動により“そこへ動かすこと”がなくなり、スタッカクレーンを輸送車両上に迅速かつ正確に配置することによって、積載作業時間が短縮される。
さらに、物流管理用DPシステムは、コンテナの取付手段及び位置座標を目印によって決定する。これにより、迅速かつ正確に位置座標を計算し、輸送車両の荷降ろし作業をすぐに始めることができる。
スタッカクレーンはコンピュータ操作によって、コンテナ及び位置座標上に重なるように移動する。迅速かつ正確に懸架装置をコンテナ上に配置する作業から手動操作を除外したことによって、荷降ろし作業時間が短縮される。
【0013】
荷台又はコンテナの固定手段が、スタッカクレーンに備えられた校正カメラによって検知された後、コンテナは必要に応じて、コンテナの固定手段が対応配置した荷台の固定手段の真上にくるように移動される。これにより、迅速でミスがなく正確に、コンテナを荷台の位置に対して合わせることができる。従来の方法のような、駐車位置にいるオペレータによるコンテナを“そこへ動かす” 時間のかかる作業が除外される。それにより、遠隔からオペレータの視覚による監視が少なくとも1台のカメラからの映像によって行えることが利点である。同じように、個々の作業ステップが間断なく続けて行われることによって、積み降ろし時間が短縮される。
【0014】
また、荷台に対してコンテナが正確に配置されるため、コンテナを輸送車両の荷台の上に降ろして、下降作業の最後にコンテナの固定手段を対応する荷台の固定手段にぴったりと係合させることができる。その場にいるオペレータの操作によるコンテナを吊るした懸架装置を“そこへ動かす”という欠点がなくなり、時間短縮が可能となる。コンテナが懸架装置により輸送車両の上に配置され、切り離される。スタッカクレーンによる積載作業は完了する。
さらに、懸架装置の取付手段をコンテナの位置に対して迅速かつ正確に合わせることができるため、懸架装置をコンテナに降ろして、その取付手段をコンテナの取付手段に係合させることができる。オペレータによって手動操作する従来の方法は除外されるて、時間短縮が可能となる。コンテナが輸送車両から取り外された後懸架装置により荷降ろしされて一時的にコンテナヤードに保管されると、スタッカクレーンの荷降ろし作業は完了する。
【0015】
さらに、オペレータが積み降ろし作業の前後や作業中に現場にいる必要がないため、オペレータは他の作業もできるという利点がある。
【0016】
カメラシステムを使って輸送車両を認識すると、特に利点がある。目視及び手動による認識作業を除外したことにより、認識結果は物流管理用DPシステムへ迅速かつ正確に送信される。
【0017】
荷台目印の座標を検出するために、オペレータは物流管理用DPシステムのモニタのユーザ選択画面を使用して、画面上の荷台の目印をマーキング手段で選択する。ユーザ選択画面にはカメラシステムからの画像が表示される。オペレータがマーキング手段によってユーザ選択画面上に表示した輸送車両の荷台の目印を選択することで、輸送車両荷台の固定手段の座標を正確に検出して、迅速な計算を行うことができる。
【0018】
また、荷台目印の座標をコンピュータシステムにより自動的に検出して、物流管理システムへ送信することにより、更に積み降ろし時間を短縮できる自動化を実現できる。
【0019】
請求項1に記載の位置座標を決定するステップは、異なる2つの方法によって実現可能である。1つは、積み降ろし区域において輸送車両の荷台座標を検出する方法が好ましい。このとき輸送車両はすでに認識されており、積載されるコンテナも積載指示で決まっている。これによって、物流管理用DPシステムは、積載されるコンテナを輸送車両が収容可能かどうかを早期に判断できる。輸送車両荷台の固定手段が正常に認識されれば、積載作業が続行され、認識されなければ、積載作業が開始されていた場合には、中止される。
【0020】
輸送車両荷台の座標が最終的に積み降ろし区域において検出されると、荷台の高さ及び荷台目印の対角線の交点により表示される位置座標は、コンテナの絶対目標位置となる。それにより位置調整は特に巧妙となり、迅速に短時間で、コンテナを積んだ自動スタッカクレーンを積載する荷台上に配置することができる。
【0021】
同様に好ましいのは、位置座標を調べるための請求項1に記載しているステップの本願による別の構成である。このとき、輸送車両荷台の座標は認識区域において検出される。これによって、物流管理用DPシステムは、輸送車両がコンテナを収容可能かどうかを早期に判断できる。輸送車両の荷台の固定手段が正しい位置にあると、積載作業が続行され、その他の場合には、積載作業が開始されていた場合でも中止される。
【0022】
輸送車両荷台の座標検知が認識区域で行われるので、検知した荷台の座標は輸送車両に関するものである。このため、荷台の高さと、荷台の目印を結ぶ対角線の交点とはコンテナの相対目標位置となる。
コンテナの位置座票はコンテナの目印の高さと、コンテナの目印を結ぶ対角線の交点とによって決定され、コンテナ上の相対目標位置を示す。コンテナの目印(取付手段)を位置座票として選択することによって、オープントップコンテナ、タンクコンテナ及び/又はフラットコンテナのような、天井部のない標準コンテナも荷降ろしをすることができる。このような位置座票の選択により、迅速に短時間で、自動スタッカクレーンを荷降ろしするコンテナ上に配置することができる。
【0023】
認識区域において検出された荷台の位置座標は輸送車両のみに関する座標であるため、コンテナの相対目標位置となる。この位置座標を、カメラを使って調べた駐車位置に配置の輸送車両座標に、コンテナの相対目標位置を重ねたコンテナの絶対目標位置により示すと好ましい。認識区域においてあらかじめ検出された座標は、物流管理用DPシステムによって、駐車位置において認識された輸送車両の位置と比較される。この比較結果が、コンテナの絶対目標位置となる位置座標である。この結果、後述するように、巧妙にかつ短時間で、コンテナを積んだ自動スタッカクレーンを積み降ろしする荷台上に配置することができる。
【0024】
座標を検出する場所に関係なく、一つまたは複数の固定手段の位置が誤っていればDPシステムのユーザ選択画面で明らかになる。オペレータがそれに気づいて、輸送車両の運転手に連絡する。運転手が固定手段位置の不時のミスをタイミング良く修正する。
【0025】
座標を検出するどちらの方法においても、位置座標を好ましく選択することにより、コンテナ固定手段を結ぶ対角線の交点が荷台固定手段の対角線を結ぶ交点の真上に来るように、懸架装置がコンテナを荷台の届く範囲に移動することが可能になる。従って、スタッカクレーンから吊るされたコンテナは荷台の真上に配置された後、場合によっては次にステップにおいて懸架装置から吊るされたコンテナの回転によって方向を変えねばならない。このときスタッカクレーンが移動する必要はなく、すなわち、ACSのブリッジと、その上を移動するトロリはすでに積載位置にある。懸架装置をオペレータが操作して少しずつ動かす作業は除外されることが利点である。この結果、懸架装置の位置調整が非常に簡易化されるため、積み降ろしに必要な時間を大幅に短縮することができる。
【0026】
オペレータによる積み降ろし作業のコントロールは、各1対の固定手段を表示する4分割された第二ユーザ選択画面によって簡易化され、そのときその対は、カメラシステムの画像から切り取られた荷台の固定手段、およびコンピュータ計算したコンテナを含めた固定手段の輪郭を画面上で重ねたコンテナの対応する固定手段で構成している。これによって、オペレータは駐車位置にいなくても、積み降ろし作業をコントロールすることができる。
【0027】
さらに、本発明において、物流管理システムの第2のユーザ選択画面はマーキング手段を有しており、オペレータは荷台上の目印を1つ以上選択できる。これにより、場合によっては発生する積載コンテナと荷台位置のずれを、精密位置決めするために物流管理用DPシステムによって決めることができるという利点がある。そのようにして調べた正確な荷台の配向が、荷台に対するコンテナ位置決めのために必要である。物流管理用DPシステムによってずれが認識されると、次のステップにおいて、コンテナが位置調整される。荷台の位置を容易に検知すること、また物流管理用DPシステムのデータを直接利用してデータの誤りを排除することによって、特に大きく作業時間を短縮できる。
【0028】
同じく本発明の構成において、積載されるコンテナと荷台の位置の、場合により発生するずれを、精密位置決めのためにコンピュータシステムによって自動的に認識できるという利点がある。
【0029】
積載されるコンテナと荷台の位置、あるいは懸架装置と荷降ろしされるコンテナの位置にずれがあった場合、コンテナ又は懸架装置の取付手段が荷台又はコンテナの取付手段の真上に配置されるように、コンテナ又は懸架装置は回転される。このように、コンテナを荷台に対して、あるいは懸架装置をコンテナに対して迅速かつ正確に方向転換させる作業は、コンピュータによって計算されたずれに基づいて自動的に行われる。例えば平坦でない地面において輸送車両がその縦方向及び/又は横方向に傾いても、積み降ろし作業に悪影響を及ぼさない、という大きな利点がある。コンテナを積んだ懸架装置を荷台に、あるいは懸架装置をコンテナに対して少しずつ動かす作業が除外されるため、輸送車両への積み降ろしに必要な時間を極端に短縮できる。
【0030】
懸架装置からコンテナを離して積載する作業あるいは懸架装置をコンテナに近づけて吊り上げる作業、及び取付手段を係合する作業は、オペレータの操作あるいはコンピュータシステムによって自動的に行われる。コンテナ又は懸架装置が荷台又はコンテナの真上に配置されて正確に位置調整されると共に、DPシステムが荷台又はコンテナの高さを決めるので、コンテナ又は懸架装置が配置される作業は迅速かつ連続的に行われ、手動による作業よりも早く完了させることができる。コンテナの積載作業は、コンテナと荷台の固定手段が係合すると完了する。懸架装置からコンテナが降ろされて圧力センサがそれを表示すると、コンテナは懸架装置から離されて輸送車両に固定される。コンテナを吊り上げる作業は、懸架装置とコンテナの取付手段が係合すると完了する。懸架装置に係合されたコンテナはスタッカクレーンによってコンテナヤードに一時的に保管される。こうして、荷降ろし作業が完了する。
【0031】
【0032】
【0033】
【0034】
【0035】
【0036】
【0037】
【0038】
【0039】
【0040】
【0041】
【0042】
【0043】
【0044】
【0045】
【0046】
【0047】
【0048】
【0049】
【0050】
【0051】
一連の作業ステップによって、輸送車両に対する積み降ろし作業時間が早くなり、このようにして節約された時間は次の積み降ろし作業に利用することができる。したがって、コンテナヤードのコンテナ処理能力が高まり、効率アップが図られ、貨物輸送の時間短縮が可能になる。
【0052】
さらに、請求項16に記載の方法によって、スタッカクレーンの調整を常時、低費用で行えるという利点がある。スタッカクレーン用のカメラにおいて、構造部品公差、製造公差、レンズの不均質、及び/又は光学的誤差によって幾何学的偏差が生じるが、カメラを使用する前に校正することで回避される。スタッカクレーン用のカメラからの画像は、校正による補正アルゴリズムによって、操作中に常に修正される。カメラ固有の補正アルゴリズムが、物流管理用DPシステムによるカメラの各画像に適用される。したがって、各補正アルゴリズムの適用の下で、各カメラは所定の光学特性を持つことになる。さらに、使用前に校正することよって物流管理用DPシステムは、観察され既知の対象物の間隔を光学の法則に従って測定できる。
【0053】
この校正カメラを使用して、スタッカクレーンの位置調整を行える。請求項16によれば、スタッカクレーンはまずコンテナヤード内の任意の位置に配置された参照点に移動して、カメラシステムのうち1台以上のカメラが参照点をとらえるようにする。物流管理用DPシステムはカメラの画像から計算した新しい参照点の位置と、既知の参照点の位置とを比較して、誤差を発見した場合はスタッカクレーンのずれを測定する。参照点は通常移動しないので、物流管理用DPシステムによって計算されたスタッカクレーンの位置にずれの分を足して、スタッカクレーンの位置座標を修正できる。この方法は、コンテナ用自動スタッカクレーン(ACS)のレールの長さが、夏季や冬季の温度変化による膨張や縮小によって変わった場合などに有効である。物流管理用DPシステムは、スタッカクレーンの絶対移動距離によってその位置を計算するが、温度変化やスタッカクレーンが実際に移動した距離などを考慮して、物流管理用DPシステムによって計算された位置と置き換えることができる。これによって、様々な要因によって実際の位置と異なって計算されたスタッカクレーンの位置を修正することができるという利点がある。この方法によって、いつでも所望のときに頻繁にスタッカクレーンをすぐに調整できるという特別の利点がある。
【0054】
コンテナヤード内に複数の参照点を設ける、と特に利点がある。スタッカクレーンを1つの参照点上に配置した後、物流管理用DPシステムはデータ内の参照点の位置と、カメラの画像から新たに計算された位置とを比較して、参照点に対するスタッカクレーンのずれを計算する。複数の参照点がスタッカクレーンの移動線上に配置されている状態で、狭い時間領域内で1つの参照点に見られるずれが偶然誤差であった場合、その参照点の近傍において地面の変形があることを指している。これを考慮して、物流管理用DPシステムはスタッカクレーンの位置計算を修正する。この結果、膨張による誤差の発生を避けることができる。
【0055】
コンテナヤード内に超参照点を設けて、これに対してスタッカクレーンのカメラを調整する、と特に利点がある。技術的欠陥などによってスタッカクレーンのカメラを取り替えた場合に、スタッカクレーンで新しいカメラの初期調整をする必要がある。超参照点を使用することによって、物流管理用DPシステムにより、修正軌道をスタッカクレーンの新しいカメラに対して決定する。この方法によって、修理及び調整にかかる時間と、それによるスタッカクレーンの作業中断時間を短縮できるという利点がある。超参照点をコンテナヤード内の、上記したような外的影響を受けない場所に設けると好ましい。スタッカクレーンは、校正された新しいカメラを備えられて超参照点の上に移動し、新しいカメラがそれを検知するようにする。DPシステムは超参照点の位置を測定し、データ内の超参照点の位置と比較する。誤差があれば、修正軌道を新しいカメラに適用し、このカメラに基づいて行う位置計算に使用する。スタッカクレーンの新しいカメラを迅速に調整することによって節約された時間を、積み降ろし作業に利用することができる。
【発明を実施するための最良の形態】
【0056】
図1は、コンテナ1用の自動コンテナターミナル24を示している。このターミナルの陸側で、コンテナ1がトラック7(図2参照)に積み下ろしされる。認識区域25では、出入りするトラックが認識及び/又は測定される。到着したトラック7は認識されて、積み降ろしに必要なデータが物流管理用DPシステム(図示せず)に送信される。この後、トラック7は車道26を通過して積み降ろし区域6へ移動する。
【0057】
図2は、認識区域25に設けられてトラック7をあらゆる方向から感知するカメラ27を示している。トラック7のプレートナンバ28場合によってはトレーラ7.1のプレートナンバ29がカメラ27に検知される。同様に、トラック7に積荷がある場合にはコンテナ1の識別番号30も検知される。トラック7、トレーラ7.1、場合によってはコンテナ1に関するあらゆる情報が物流管理用DPシステムに送信されて、システム上で常時利用可能となり、オペレータ(図示せず)が検索できるようになる。
【0058】
図3及び4に示すように、自動コンテナヤード2にコンテナ1が積み重ねられて収容される。自動スタッカクレーン3はブリッジ3.1上を移動する可動トロリ3.2を有しており、ブリッジ3.1はクレーン軌道4上を移動する。積み降ろし作業において、コンテナ1は可動トロリ3.2の可動マスト3.3にしっかりと連結される。可動マスト3.3には、自動スタッカクレーン3の懸架装置3.4が備えられ、コンテナを収容する。自動スタッカクレーン3は物流管理用DPシステムに接続されて、可動区域内のあらゆる座標にいつでも移動可能である。座標システム(図示せず)は、自動スタッカクレーン3の懸架装置3.4が移動した位置を表示する。自動スタッカクレーン(ACS)に代えて、ガントリクレーンあるいは1足ガントリクレーンを使用してもよい。
【0059】
自動コンテナヤード2は、柵又は壁の仕切5によって積み降ろし区域6から区切られている。積み降ろし区域6において、トラック7はそれぞれ駐車位置8に配置される。図3及び4は、指示された駐車位置8に後ろ向きに入ったトラック7を示している。駐車位置8はコンクリート溝8.1を両側に有しており、トラック7の車輪9をガイドしてトラック7が容易に後ろ向きに駐車できるようにする。トラック7がバックして、駐車位置8を区切る車止め8.2に車輪9が当たると駐車作業は完了する。
【0060】
各駐車位置8には、固定校正カメラ10が仕切5の上に取り付けられている(図5参照)。トラック7の荷台31全体と荷台上のコンテナ1を完全に検知するように、カメラ10の視野角11は選択する。このカメラ10の視野角11によって、モニタ12(図6参照)においてオペレータは駐車作業を観察することができる。
【0061】
図6は、モニタ12で見たカメラ10の映像を示している。この映像によってオペレータは、トラック7の駐車作業及び積み降ろし作業を観察して操作することができる。駐車位置8でトラック7に積載するために、トラック7の荷台31の位置を測定せねばならない。そのために、十字カーソル14などのマーキング手段がカメラ10の映像に重ねられ、オペレータはそれで目印を選択する。この目印は、トラック7の荷台31の固定手段、いわゆるツイストロック13である。ツイストロック13の座標が物流管理用DPシステムに送信される。そのとき、物流管理用DPシステムはツイストロック13をつなぐ対角線16及びこの対角線の交点17を計算する。交点17は座標システムにおける荷台の高さ15を示す。この計算は、正確な位置及び視野方向が分かっている固定設置カメラ10を予め校正することによって可能となる。
【0062】
図7に示すように、スタッカクレーン3の固定マスト3.3に連結されたコンテナ1は、コンテナ1の固定手段をつなぐ対角線の交点が、トラック7の荷台31の固定手段をつなぐ対角線16の交点17の真上に位置するように、トラック7の荷台31の上に配置される。図8に示すように、スタッカクレーン3に設けられたカメラ18により、荷台31上に積むコンテナ1の位置の方法により、カメラ18の視野角19は限定される。20フィート、30フィート、40〜45フィートの異なる寸法のコンテナに応じて、視野角19.1及び19.2がコンテナ1の中心部を除いた左右に必要となる。すなわち、荷台31における対角線16の交点17の座標から後部へ3m〜7mの範囲のカメラ視野42.1と、前部へ3m〜7mのカメラ視野42.2が必要である。コンテナ1に適する荷台31のツイストロック13はこの範囲のみである。
【0063】
図9は、物流管理用DPシステムにおける4分割ユーザ選択画面20を示している。各分割画面は、スタッカクレーン3に備えられた複数のカメラ18のうちの少なくとも1台で撮影された分割画面を表示する。無駄を避けるとともに、信頼性を高めるため、4分割画面は1台のカメラからの、または2台のカメラによる2つの映像からの4つの分割映像を表示してもよい。また同様に、各分割画面に対してそれぞれ1台のカメラを設置してもよい。各分割画面はそれぞれ、荷台31の固定手段であるツイストロック13を表示する。オペレータがツイストロック22の位置のずれを発見するとインターコムを使用して、トラック7の運転手にその位置を修正するように告げる。コンピュータによって計算されたコンテナの輪郭23が画面上に重ねられ、コンテナ1の現在の位置をオペレータに示す。荷台31に対するコンテナ1の配向は、オペレータが十字カーソル24などのマーキング手段を使用して、荷台31の固定手段であるツイストロック13を選択し直すことで修正される。荷台31の固定手段の座標が再び物流管理用DPシステムに送信されて、荷台31の現在の配向が計算される。コンテナ1と荷台31の配向の、場合によって存在するずれが物流管理用DPシステムによって計算されると、マスト3.3のところでコンテナ1は懸架装置3.4によって、コンテナ1の固定手段が全て荷台31の固定手段の真上に位置するように、回転される。
【0064】
図10に示すように、下降作業を始めるときにコンピュータによって計算されたコンテナの輪郭23の上に、下降作業の間中ずっと新たに計算された輪郭が重ねられる。下降作業の最後には、コンテナ1の固定手段がトラック7の荷台31の固定手段に係合する。コンテナ1が配置される際、オペレータはその積載作業をモニタで観察して操作する。
【0065】
図11〜13に、トラック7の荷台31又はコンテナ1の目印を検出する他の方法が示されている。ここでは、前述した方法の作業の順序を並べ替えて示している。
【0066】
図11は、変形例において、場合によってはコンテナ1を積んで到着したトラック7を認識する認識区域25を示している。輸送車両用のナンバープレート28、29と場合によってコンテナ1の識別番号30とを認識区域25に備えられたカメラ27によって検知して、トラック7の認識をする。カメラは物流管理用DPシステムに接続されており、データを送信する。ここで図2に示す作業に加えて、トラック7の場合によって存在するコンテナ1及び/又は空の荷台31が測定される。トラック7は側面32及び上部(上面)33からカメラ27によって検知される。図6に示すような荷台31(又はコンテナ1)の目印の検出を、図6と較べて積み降ろし区域6では行わずに認識区域25で行う。目印の検出方法は前述と同様である。また、固定手段の高さ34、35の自動測定もカメラ27によって行われる。検出されてDPシステムに送信された座標はこのトラック7のみに関する座標であるため、荷降ろしされるコンテナの相対目標位置となる。トラック7に対する一連の認識及び測定作業の後、トラック7の運転手は磁気カード又はICカード(図示せず)による入庫許可証を得る。磁気カードは、作業指示に関するデータも含んでいる。
【0067】
次に、運転手は指示された積み降ろし区域6(図12)にトラック7を移動させ、輸送車両を積み降ろし区域6の任意の駐車位置8に後ろ向きに入れる。図13に示すように、駐車作業の間、物流管理用DPシステムにおいて、駐車位置8に備えられたカメラ36によって認識作業が始められる。この認識作業においてトラック7は認識されると共に、座標システムにおいて幾何学的に分類される(記述せず)。仕切5に備えられたカメラ36からの情報によって、物流管理用DPシステムはトラック7を識別すると共にその位置、つまり、仕切5からの距離37、駐車位置8内の左右の隙間、地面38に対するトラック7のズレ角度を正確に認識することができる。そのため、駐車作業を終えた後には、トラック7の正確な位置は物流管理用DPシステムに把握されている。上記で得た荷台の座標及びコンテナ1の相対目標位置を考慮して、物流管理用DPシステムは積載されるコンテナ1の位置座標を決定する。この位置座標は、積載されるコンテナの絶対目標座標を示している。
【0068】
次に、トラック7の運転手は報告区域39に移動し、磁気カードを使用して、トラック7の積み降ろし準備完了の信号を送る。DPシステムは磁気カードのデータと、トラックが入庫した駐車位置8からのデータとを比較して、一致するとスタッカクレーン3へ指示を出す。スタッカクレーン3は積載されるコンテナ1をコンテナヤード2から選んで図7に示す方法でトラック7への積載を開始する。
【0069】
さらに、図12は許容範囲40を示している。安全上の理由から、各駐車位置8内においてスタッカクレーン3の懸架装置3.4は、この許容範囲40内のみで移動可能である。
【0070】
図14は、参照点41を備えたコンテナヤード2を示している。
【図面の簡単な説明】
【0071】
【図1】コンテナターミナルの概略図である。
【図2】輸送車両を検知する認識区域を示す図である。
【図3】コンテナターミナルの一部であるコンテナヤード及び駐車位置を示す図である。
【図4】図3が示す区域の側面図である。
【図5】駐車位置に設置されたカメラの視野角を示す図である。
【図6】第1のユーザ選択画面を示す図である。
【図7】自動コンテナクレーンに備えられたカメラの視野角を示す図である。
【図8】自動コンテナクレーンに備えられたカメラの視野角を示す図である。
【図9】第2のユーザ選択画面の、積載作業中の状態を示す図である。
【図10】ユーザ選択画面の、積載作業完了間際の状態を示す図である。
【図11】目印の検出方法の他の実施例を示す図である。
【図12】他の実施例におけるコンテナターミナル、コンテナヤード、及び駐車位置を示す図である。
【図13】他の実施例における、駐車位置に備えられたカメラの視野角を示す図である。
【図14】参照点の配置を示す図である。
【技術分野】
【0001】
本発明は、規格コンテナ用のコンテナヤードで使われ物流管理用DPシステムにより操作可能なコンテナ用スタッカクレーンを使用して、コンテナヤードにおいて積み降ろしする方法に関するものであり、そのスタッカクレーンは各コンテナの格納先と、コンテナヤード内を移動できるコンテナ運搬車両の荷台との間を移動可能であり、そのときスタッカクレーンは荷台から又は荷台に収容および/または降ろすために懸架装置を有しており、この装置は荷台に対して方向を変えることができる。
【背景技術】
【0002】
コンテナヤードは、規格コンテナの一時的な収容庫であり、コンテナをある輸送手段から別の輸送手段へ移すことを可能にするためのものである。コンテナの輸送手段としては一般に大型コンテナ船、列車、トラック、トレーラ、あるいはAGV(自動案内車両)などがある。コンテナ積み降ろし港において、コンテナ船から降ろしたコンテナは、陸送されるまで一時的にコンテナヤードに保管される。逆方向ではコンテナが、コンテナ積み降ろし港のコンテナヤードに集められ、引き続いてコンテナ船に積み込まれる。陸送はトラック、トレーラ、列車あるいはAGVにより行われ、本願においては特にトラックで行われる。
【0003】
コンテナヤードにおいて扱われる多数のコンテナは、迅速かつ正確に輸送手段に対して積み降ろしをする必要がある。スタッカクレーンはコンテナをコンテナヤードから輸送車両へ、そしてその逆に運搬する。スタッカクレーンはコンテナ用自動スタッカクレーン(ACS)でもよいし、ガントリクレーン又は1足ガントリクレーンでもよい。現在は、コンテナを輸送手段に移動させるときにはスタッカクレーンを手動で操作している。スタッカクレーンは、ブリッジと、当該ブリッジ上を移動するトロリと、を有しており、ブリッジはレール上を移動する。クレーンに懸架しているコンテナの輸送車両への移動は、オペレータによって手動操作される。積載に際しては、駐車位置にいるオペレータがスタッカクレーンを使用してコンテナを輸送車両の近くまで移動させて、その後ゆっくり“動かして”コンテナを輸送車両に正確に配置する。配置に際しては、ACSを左右及び前後に繰り返し移動させる作業と、コンテナを下降させる作業とをオペレータがその場で操作し監視する。同様に、輸送車両からコンテナを降ろすときには、オペレータが手動でスタッカクレーンをゆっくりコンテナに近づけて、コンテナを収容する。
【0004】
多数のコンテナをコンテナヤード内で扱うにおいては、円滑、正確、迅速、経済的、かつ長期にわたる作業を必要とする。さらに、コンテナの処理量、つまり単位時間に処理するコンテナの数を増加させることが好ましい。これによってコンテナがコンテナヤードに保管される時間、コンテナ船に積載されるまでの時間、および陸送用輸送車両の滞在時間が短縮される。ひいては、コンテナの輸送時間を短縮することにもなる。
【発明の開示】
【0005】
本発明の課題は、コンテナヤードにおけるコンテナの処理能力を高め、コストを削減し、不具合による不稼働時間の短縮を達成する共に、コンテナヤードの収益性を向上させることにある。
【0006】
この課題は、輸送車両に規格コンテナを積載する本願の請求項1に記載の方法、規格コンテナを積載した輸送車両からコンテナを降ろす請求項2に記載の方法、およびスタッカクレーンの位置を調整する請求項17および19に記載の方法によって解決される。
【0007】
本発明の利点は、自動化によって可能となる、輸送車両に対する円滑な積み降ろし作業である。本発明において、積み降ろしにおける単純な繰り返し作業はいくつかのステップに分けられ、それぞれが自動化されている。一連の自動化作業は中断されないため手動操作による作業よりも時間短縮が可能であり、その正確な作業によっても積み降ろし作業の時間短縮が可能であることが利点であり、積み替えするコンテナの処理能力を高める。
【0008】
輸送車両へのコンテナの積載は請求項1に記載のステップa)〜f)に従って、段階に分けて行われる。これらのステップを実行することによって規格コンテナを輸送車両に積載する時間を短縮できるため、コンテナヤードにおける処理能力を高めることができる。各ステップの作業を自動化することによる個々の時間短縮が、結果として利益をもたらす積載作業全体の時間短縮につながる。また、作業ミスの回数が減少することによっても、同様に処理能力を高めることができる。
【0009】
輸送車両が認識されて発生したデータを物流管理用DPシステムに送信すると好ましい。同時に、物流管理用DPシステムはスタッカクレーンに積載又は荷降ろしの指示を出す。積載指示には、輸送車両に載せるために、スタッカクレーンがコンテナヤードに保管されているコンテナを持ち上げて輸送車両にコンテナを積載することを含んでいる。(一部削除)作業ステップを平行して行えるため、積み降ろし作業の時間を短縮できて、車両データを検知及び送信するときのミスを減少できる。
【0010】
さらに、校正カメラを使用して輸送車両の荷台上に明示した目印を検知し、その座標を物流管理用DPシステムに送信する。この目印から、DPシステムは、輸送車両の固定手段の座標を調べる(付属する座標システムが、スタッカクレーン懸架装置の固定手段の届く少なくとも一つの空間を決める)。この方法により、コンテナに対する固定手段の位置検知を迅速かつ正確に検知でき、輸送車両に対する積み降ろし時間を短縮することができる。
【0011】
物流管理用DPシステムが目印の座標と、DPシステムに保存されている積載コンテナのデータとを比較して、このコンテナ用の固定手段と、輸送車両の荷台上の位置座標を調べると好ましい。DPシステムに保存されているコンテナの寸法に応じた座標を、調べた輸送車両固定手段の座標とタイミングを合わせて比較する。輸送車両の荷台の寸法が積載されるコンテナに十分な寸法であれば、その輸送車両の固定手段が測定される。輸送車両の荷台が積載されるコンテナ用に充分大きくない場合には、積載作業/操作を早期に中断可能であり、あるいはスタッカクレーンによるコンテナヤードからのコンテナの運搬がタイミング良く中止可能であるため、かなりの時間節約ができる。
【0012】
固定手段の座標を正確に検出すると、駐車位置に配置された輸送車両への積載作業をすぐに始めることができる。そのために、スタッカクレーンはコンピュータ操作によって移動し、積載されるコンテナを輸送車両の荷台に正確に重なるように、位置座標上に運搬する。手動により“そこへ動かすこと”がなくなり、スタッカクレーンを輸送車両上に迅速かつ正確に配置することによって、積載作業時間が短縮される。
【0013】
荷台又はコンテナの固定手段が、スタッカクレーンに備えられた校正カメラによって検知された後、コンテナは必要に応じて、コンテナの固定手段が対応配置した荷台の固定手段の真上にくるように移動される。これにより、迅速でミスがなく正確に、コンテナを荷台の位置に対して合わせることができる。従来の方法のような、駐車位置にいるオペレータによるコンテナを“そこへ動かす” 時間のかかる作業が除外される。それにより、遠隔からオペレータの視覚による監視が少なくとも1台のカメラからの映像によって行えることが利点である。同じように、個々の作業ステップが間断なく続けて行われることによって、積み降ろし時間が短縮される。
【0014】
また、荷台に対してコンテナが正確に配置されるため、コンテナを輸送車両の荷台の上に降ろして、下降作業の最後にコンテナの固定手段を対応する荷台の固定手段にぴったりと係合させることができる。その場にいるオペレータの操作によるコンテナを吊るした懸架装置を“そこへ動かす”という欠点がなくなり、時間短縮が可能となる。コンテナが懸架装置により輸送車両の上に配置され、切り離される。スタッカクレーンによる積載作業は完了する。
【0015】
さらに、オペレータが積み降ろし作業の前後や作業中に現場にいる必要がないため、オペレータは他の作業もできるという利点がある。
【0016】
カメラシステムを使って輸送車両を認識すると、特に利点がある。目視及び手動による認識作業を除外したことにより、認識結果は物流管理用DPシステムへ迅速かつ正確に送信される。
【0017】
荷台目印の座標を検出するために、オペレータは物流管理用DPシステムのモニタのユーザ選択画面を使用して、画面上の荷台の目印をマーキング手段で選択する。ユーザ選択画面にはカメラシステムからの画像が表示される。オペレータがマーキング手段によってユーザ選択画面上に表示した輸送車両の荷台の目印を選択することで、輸送車両荷台の固定手段の座標を正確に検出して、迅速な計算を行うことができる。
【0018】
また、荷台目印の座標をコンピュータシステムにより自動的に検出して、物流管理システムへ送信することにより、更に積み降ろし時間を短縮できる自動化を実現できる。
【0019】
請求項1に記載の位置座標を決定するステップは、異なる2つの方法によって実現可能である。1つは、積み降ろし区域において輸送車両の荷台座標を検出する方法が好ましい。このとき輸送車両はすでに認識されており、積載されるコンテナも積載指示で決まっている。これによって、物流管理用DPシステムは、積載されるコンテナを輸送車両が収容可能かどうかを早期に判断できる。輸送車両荷台の固定手段が正常に認識されれば、積載作業が続行され、認識されなければ、積載作業が開始されていた場合には、中止される。
【0020】
輸送車両荷台の座標が最終的に積み降ろし区域において検出されると、荷台の高さ(一部削除)及び荷台目印の対角線の交点により表示される位置座標は、コンテナの絶対目標位置となる。それにより位置調整は特に巧妙となり、迅速に短時間で、コンテナを積んだ自動スタッカクレーンを積載する荷台上に配置することができる。
【0021】
同様に好ましいのは、位置座標を調べるための請求項1に記載しているステップの本願による別の構成である。このとき、輸送車両荷台の座標は認識区域において検出される。これによって、物流管理用DPシステムは、輸送車両がコンテナを収容可能かどうかを早期に判断できる。輸送車両の荷台の固定手段が正しい位置にあると、積載作業が続行され、その他の場合には、積載作業が開始されていた場合でも中止される。
【0022】
輸送車両荷台の座標検知が認識区域で行われるので、検知した荷台の座標は輸送車両に関するものである。このため、荷台の高さと、荷台の目印を結ぶ対角線の交点とはコンテナの相対目標位置となる。
【0023】
認識区域において検出された荷台の位置座標は輸送車両のみに関する座標であるため、コンテナの相対目標位置となる。この位置座標を、カメラを使って調べた駐車位置に配置の輸送車両座標に、コンテナの相対目標位置を重ねたコンテナの絶対目標位置により示すと好ましい。認識区域においてあらかじめ検出された座標は、物流管理用DPシステムによって、駐車位置において認識された輸送車両の位置と比較される。この比較結果が、コンテナの絶対目標位置となる位置座標である。この結果、後述するように、巧妙にかつ短時間で、コンテナを積んだ自動スタッカクレーンを積み降ろしする荷台上に配置することができる。
【0024】
座標を検出する場所に関係なく、一つまたは複数の固定手段の位置が誤っていればDPシステムのユーザ選択画面で明らかになる。オペレータがそれに気づいて、輸送車両の運転手に連絡する。運転手が固定手段位置の不時のミスをタイミング良く修正する。
【0025】
座標を検出するどちらの方法においても、位置座標を好ましく選択することにより、コンテナ固定手段を結ぶ対角線の交点が荷台固定手段の対角線を結ぶ交点の真上に来るように、懸架装置がコンテナを荷台の届く範囲に移動することが可能になる。従って、スタッカクレーンから吊るされたコンテナは荷台の真上に配置された後、場合によっては次にステップにおいて懸架装置から吊るされたコンテナの回転によって方向を変えねばならない。このときスタッカクレーンが移動する必要はなく、すなわち、ACSのブリッジと、その上を移動するトロリはすでに積載位置にある。懸架装置をオペレータが操作して少しずつ動かす作業は除外されることが利点である。この結果、懸架装置の位置調整が非常に簡易化されるため、積み降ろしに必要な時間を大幅に短縮することができる。
【0026】
オペレータによる積み降ろし作業のコントロールは、各1対の固定手段を表示する4分割された第二ユーザ選択画面によって簡易化され、そのときその対は、カメラシステムの画像から切り取られた荷台の固定手段、およびコンピュータ計算したコンテナを含めた固定手段の輪郭を画面上で重ねたコンテナの対応する固定手段で構成している。これによって、オペレータは駐車位置にいなくても、積み降ろし作業をコントロールすることができる。
【0027】
さらに、本発明において、物流管理システムの第2のユーザ選択画面はマーキング手段を有しており、オペレータは荷台上の目印を1つ以上選択できる。これにより、場合によっては発生する積載コンテナと荷台位置のずれを、精密位置決めするために物流管理用DPシステムによって決めることができるという利点がある。そのようにして調べた正確な荷台の配向が、荷台に対するコンテナ位置決めのために必要である。物流管理用DPシステムによってずれが認識されると、次のステップにおいて、コンテナが位置調整される。荷台の位置を容易に検知すること、また物流管理用DPシステムのデータを直接利用してデータの誤りを排除することによって、特に大きく作業時間を短縮できる。
【0028】
同じく本発明の構成において、積載されるコンテナと荷台の位置の、場合により発生するずれを、精密位置決めのためにコンピュータシステムによって自動的に認識できるという利点がある。
【0029】
積載されるコンテナと荷台の位置にずれがあった場合、コンテナの固定手段が荷台の固定手段の真上に配置されるように、コンテナは回転される。このように、コンテナを荷台に対して迅速かつ正確に方向転換させる作業は、コンピュータによって計算されたずれに基づいて自動的に行われる。例えば平坦でない地面において輸送車両がその縦方向及び/又は横方向に傾いても、積み降ろし作業に悪影響を及ぼさない、という大きな利点がある。コンテナを積んだ懸架装置を荷台に対して少しずつ動かす作業が除外されるため、輸送車両への積み降ろしに必要な時間を極端に短縮できる。
【0030】
懸架装置からコンテナを離して積載する作業は、オペレータの操作あるいはコンピュータシステムによって自動的に行われる。コンテナが荷台の真上に配置されて正確に位置調整されると共に、DPシステムが荷台の高さを決めるので、コンテナが配置される作業は迅速かつ連続的に行われ、手動による作業よりも早く完了させることができる。コンテナの積載作業は、コンテナと荷台の固定手段が係合すると完了する。懸架装置からコンテナが降ろされて圧力センサがそれを表示すると、コンテナは懸架装置から離されて輸送車両に固定される。
【0031】
コンテナを積載した輸送車両から降ろす作業は請求項2に記載の一連のステップa)〜f)で記載している。これらのステップを実行することによって規格コンテナ用輸送車両から降ろす時間を短縮できるため、コンテナヤードにおける処理能力を高めることができる。作業を自動化することによる各ステップの時間短縮が、結果として荷降ろし作業全体の時間短縮につながる。また、作業ミスの回数が減少することによっても、同様に処理能力を高めることができる。
【0032】
輸送車両および降ろすコンテナを認識し、それにより発生したデータを物流管理用DPシステムに送信すると、利点がある。同時に、物流管理用DPシステムはスタッカクレーンに荷降ろしの指示を出す。この荷降ろし指示には、降ろすコンテナを輸送車両から取り上げて、これをコンテナヤードに保管する業務が含まれている。作業ステップを平行して行えることによる時間的なメリットにより、荷降ろし作業の時間を短縮できて、車両データ、コンテナデータを検知及び送信するときのミスも減少できる。
【0033】
さらに、校正カメラを使用してコンテナに明示した目印を検知し、その座標を物流管理用DPシステムに送信する、と有用である。DPシステムが、この目印から荷降ろしするコンテナ固定手段の座標を調べる(付属する座標システムは、荷物収容装置の固定手段の届く少なくとも一つの空間を示す)。この方法により、コンテナ固定手段の位置を迅速かつ正確に検知でき、それにより輸送車両での荷降ろし時間を短縮することができる。
【0034】
物流管理用DPシステムが目印からコンテナの固定手段と位置座標を調べると、非常に利点がある。これにより、迅速かつ正確に位置座標を計算し、輸送車両の荷降ろし作業をすぐに始めることができる。
【0035】
そのために、スタッカクレーンはコンピュータ操作によってコンテナ上方に、位置座標上に重なるように移動する。懸架装置を迅速かつ正確に荷降ろしするコンテナ上に配置することによりは、手動で“動かす”操作がなくなって、荷降ろし作業時間が短縮される。
【0036】
スタッカクレーンに備えた校正カメラを使って、コンテナの固定手段を検知し、場合によっては、対応配置したコンテナの固定手段の真上にくるように、懸架装置の固定手段を移動する。これにより、収容するコンテナに対して懸架装置を迅速でミスがなく正確に合わせることができる。従来の方法と比較して、駐車位置にいるオペレータによる時間のかかる懸架装置の“そこへ動かす”作業がなくなる。それにより少なくとも1台のカメラの映像を見るオペレータにより、外観的なコントロールを行えるという利点がある。同じように、個々の作業ステップが間断なく続けて行われることによって、荷降ろし時間が短縮される。
【0037】
コンテナに対して懸架装置の固定手段を迅速に正確に配向することにより、懸架装置はコンテナの所に、懸架装置の固定手段がコンテナの固定手段にぴったりと係合するように移動することができる。オペレータの操作によりコンテナの所に懸架装置を“そこへ動かす”という欠点がなくなり、利点として時間短縮が可能となる。コンテナが輸送車両により解かれて、懸架装置により荷降ろしされ、引き続いてコンテナヤードで保管される。これにより、スタッカクレーンによる荷降ろし作業は完了する。
【0038】
オペレータが荷降ろし作業の前後や作業中に現場にいる必要のないことが、特に利点をもたらす。それによりオペレータは他の作業もできる。
【0039】
カメラシステムを使って輸送車両および荷降ろしするコンテナを認識すると、特に利点がある。目視及び手動による認識作業がなくなることにより、発生したデータは迅速かつ正確に物流管理用DPシステムへ送信される。
【0040】
コンテナ目印の座標を検出するために、オペレータは物流管理用DPシステムのモニタのユーザ選択画面を使用して、画面上のコンテナの目印をマーキング手段で選択する。ユーザ選択画面にはカメラシステムからの画像が表示される。オペレータがマーキング手段によってユーザ選択画面上に表示されたコンテナの目印を選択することで、輸送車両荷台の固定手段の座標を正確に検出して、迅速に計算を行うことができる。
【0041】
さらに、コンテナ目印の座標をコンピュータシステムにより自動的に検出して、物流管理システムへ送信することにより、更に荷降ろし時間を短縮できる自動化を実現できる。
【0042】
位置座標を決定する請求項2に記載のステップは、異なる2つの方法によって実現可能である。1つは、積み降ろし区域においてコンテナ座標を検出すると利点がある。コンテナ目印にある上端の竪方向位置により、そして荷台目印の対角線交点により決められる位置座標はコンテナの絶対目標位置となる。それにより配置が巧妙なものとなり、懸架装置のついた自動スタッカクレーンを積み降ろしするコンテナ上方に、迅速そしてそれにより時間を節約して位置決めすることができる。
【0043】
本発明において同じく利点があるのは、位置座標を調べるための請求項2に記載のステップの別の構成である。このときコンテナ座標の検知は認識範囲で行われる。位置座標は、コンテナ目印にある上端の竪方向位置により、そして荷台目印の対角線交点により決められ、それがコンテナの相対目標位置となる。位置座標要素として、コンテナの目印(固定手段)の上端を選択することにより、オープントップコンテナ、タンクコンテナおよび/またはフラットコンテナのような、コンテナの天井のない規格コンテナも荷降ろしすることができる。よって、位置座標を都合良く選択することで、以下に述べる荷降ろしするコンテナの上方で自動スタッカクレーンを、巧みに、そしてそれにより時間を節約する位置決めができる。
【0044】
識別区域で検知したコンテナ座標は輸送車両に関するものであり、従って懸架装置の相対目標位置を示す。位置座標を懸架装置の絶対目標位置により示すと好ましく、それは、カメラを使って調べた駐車位置にある輸送車両の座標と懸架装置の相対目標位置を合わせたものである。既に識別区域を検知した座標は、物流管理用DPシステムにより駐車位置で検知した輸送車両の位置と結合される。この結合結果が、懸架装置の絶対目標位置である位置座標である。これにより、荷降ろしするコンテナ上で後述する巧妙でそれにより時間を節約する自動スタッカクレーンの位置決めができる。
【0045】
座標を検知するために選択した方法とは関係なく、位置座標のメリットある選択により、懸架装置の固定手段の対角線交点がコンテナ固定手段の対角線交点の真上にくるように、懸架装置をコンテナの到達範囲に移動することが可能になる。それにより、懸架装置はコンテナ上の中央にきて、そこで場合によっては以下のステップで懸架装置を回転運動させることにより方向を合わせることになる。そのために、スタッカクレーンを移動される必要がない、すなわちACSのブリッジとその上を走行するトロリは、既に正確にその最終的な荷降ろし位置に到達している。オペレータが懸架装置を操作してステップ的に動かすことがなくなる利点がある。この方法によりスタッカクレーンの位置決めが極端に簡単になり、それにより必要な荷降ろし時間が大幅に削減される。
【0046】
オペレータによる荷降ろし作業のコントロールが、各1対の固定手段を表示する4分割の第二ユーザ選択画面によって簡易化され、そのときその対は、懸架装置にあるカメラシステムの画像から切り取られたコンテナの固定手段、および懸架装置とその固定手段を画面上でコンピュータ計算した輪郭を重ねて切り取った懸架装置の対応する固定手段で構成している。これによって、オペレータは駐車位置にいなくても、積み降ろし作業をコントロールすることができる。
【0047】
本発明においては、物流管理システムの第2のユーザ選択画面は、オペレータが少なくとも1つのコンテナの目印を選択するマーキング手段を有していることにより、場合によって発生する積載コンテナと荷台位置のずれを、精密位置決めするために物流管理用DPシステムで決めることができるという大きな利点がある。そのようにして調べた正確な荷台の配向が、懸架装置に対するコンテナの配向のために必要である。物流管理用DPシステムによってずれが認識されると、次の作業ステップにおいて懸架装置の固定手段が正しく設定される。コンテナの位置を容易に検知すること、物流管理用DPシステムのデータを直接利用できること、そしてデータの誤りが減ることにより、特に大きく作業時間を短縮できる。
【0048】
同じく本発明の構成においては、荷降ろしするコンテナ位置に対する懸架装置位置の、場合により発生するずれを、微調整のためにコンピュータシステムによって自動的に認識すると好ましい。
【0049】
荷降ろしするコンテナに対する懸架装置の位置にずれがあった場合、懸架装置の固定手段がコンテナの固定手段の真上にくるように、懸架装置が回転される。それにより、コンテナに対して懸架装置を迅速かつ正確に配向する作業は、コンピュータによって計算されたずれに基づいて自動的に行われる。コンテナに対して懸架装置を少しずつ動かす作業がなくなるので、輸送車両の荷降ろしに必要な時間を極端に短縮できる。
【0050】
コンテナを収容して固定手段をぴったりと係合するまで懸架装置を迅速に連続的に動かす作業は、オペレータの操作あるいはコンピュータシステムによって自動的に行われる。懸架装置が正確にコンテナの上方にきて正確に位置調整されると共に、DPシステムがコンテナの竪方向位置を決めるので、懸架装置を遅滞なく連続して動かすことができ、手動で“動かす”よりも早く完了することができる。コンテナの収容作業は、懸架装置とコンテナの固定手段が係合すると完了する。コンテナを懸架装置に固定し、そしてスタッカクレーンがそれをコンテナヤードに仮保管する。それにより荷降ろし作業が完了する。
【0051】
一連の作業ステップによって、輸送車両に対する積み降ろし作業時間が早くなり、このようにして節約された時間は次の積み降ろし作業に利用することができる。したがって、コンテナヤードのコンテナ処理能力が高まり、効率アップが図られ、貨物輸送の時間短縮が可能になる。
【0052】
さらに、請求項17に記載の方法によって、スタッカクレーンの調整を常時、低費用で行えるという利点がある。スタッカクレーン用のカメラにおいて、構造部品公差、製造公差、レンズの不均質、及び/又は光学的誤差によって幾何学的偏差が生じるが、カメラを使用する前に校正することで回避される。スタッカクレーン用のカメラからの画像は、校正による補正アルゴリズムによって、操作中に常に修正される。カメラ固有の補正アルゴリズムが、物流管理用DPシステムによるカメラの各画像に適用される。したがって、各補正アルゴリズムの適用の下で、各カメラは所定の光学特性を持つことになる。さらに、使用前に校正することよって物流管理用DPシステムは、観察され既知の対象物の間隔を光学の法則に従って測定できる。
【0053】
この校正カメラを使用して、スタッカクレーンの位置調整を行える。請求項17によれば、スタッカクレーンはまずコンテナヤード内の任意の位置に配置された参照点に移動して、カメラシステムのうち1台以上のカメラが参照点をとらえるようにする。物流管理用DPシステムはカメラの画像から計算した新しい参照点の位置と、既知の参照点の位置とを比較して、誤差を発見した場合はスタッカクレーンのずれを測定する。参照点は通常移動しないので、物流管理用DPシステムによって計算されたスタッカクレーンの位置にずれの分を足して、スタッカクレーンの位置座標を修正できる。この方法は、コンテナ用自動スタッカクレーン(ACS)のレールの長さが、夏季や冬季の温度変化による膨張や縮小によって変わった場合などに有効である。物流管理用DPシステムは、スタッカクレーンの絶対移動距離によってその位置を計算するが、温度変化やスタッカクレーンが実際に移動した距離などを考慮して、物流管理用DPシステムによって計算された位置と置き換えることができる。これによって、様々な要因によって実際の位置と異なって計算されたスタッカクレーンの位置を修正することができるという利点がある。この方法によって、いつでも所望のときに頻繁にスタッカクレーンをすぐに調整できるという特別の利点がある。
【0054】
コンテナヤード内に複数の参照点を設ける、と特に利点がある。スタッカクレーンを1つの参照点上に配置した後、物流管理用DPシステムはデータ内の参照点の位置と、カメラの画像から新たに計算された位置とを比較して、参照点に対するスタッカクレーンのずれを計算する。複数の参照点がスタッカクレーンの移動線上に配置されている状態で、狭い時間領域内で1つの参照点に見られるずれが偶然誤差であった場合、その参照点の近傍において地面の変形があることを指している。これを考慮して、物流管理用DPシステムはスタッカクレーンの位置計算を修正する。この結果、膨張による誤差の発生を避けることができる。
【0055】
コンテナヤード内に超参照点を設けて、これに対してスタッカクレーンのカメラを調整する、と特に利点がある。技術的欠陥などによってスタッカクレーンのカメラを取り替えた場合に、スタッカクレーンで新しいカメラの初期調整をする必要がある。超参照点を使用することによって、物流管理用DPシステムにより、修正軌道をスタッカクレーンの新しいカメラに対して決定する。この方法によって、修理及び調整にかかる時間と、それによるスタッカクレーンの作業中断時間を短縮できるという利点がある。超参照点をコンテナヤード内の、上記したような外的影響を受けない場所に設けると好ましい。スタッカクレーンは、校正された新しいカメラを備えられて超参照点の上に移動し、新しいカメラがそれを検知するようにする。DPシステムは超参照点の位置を測定し、データ内の超参照点の位置と比較する。誤差があれば、修正軌道を新しいカメラに適用し、このカメラに基づいて行う位置計算に使用する。スタッカクレーンの新しいカメラを迅速に調整することによって節約された時間を、積み降ろし作業に利用することができる。
【発明を実施するための最良の形態】
【0056】
図1は、コンテナ1用の自動コンテナターミナル24を示している。このターミナルの陸側で、コンテナ1がトラック7(図2参照)に積み下ろしされる。認識区域25では、出入りするトラックが認識及び/又は測定される。到着したトラック7は認識されて、積み降ろしに必要なデータが物流管理用DPシステム(図示せず)に送信される。この後、トラック7は車道26を通過して積み降ろし区域6へ移動する。
【0057】
図2は、認識区域25に設けられてトラック7をあらゆる方向から感知するカメラ27を示している。トラック7のプレートナンバ28場合によってはトレーラ7.1のプレートナンバ29がカメラ27に検知される。同様に、トラック7に積荷がある場合にはコンテナ1の識別番号30も検知される。トラック7、トレーラ7.1、場合によってはコンテナ1に関するあらゆる情報が物流管理用DPシステムに送信されて、システム上で常時利用可能となり、オペレータ(図示せず)が検索できるようになる。
【0058】
図3及び4に示すように、自動コンテナヤード2にコンテナ1が積み重ねられて収容される。自動スタッカクレーン3はブリッジ3.1上を移動する可動トロリ3.2を有しており、ブリッジ3.1はクレーン軌道4上を移動する。積み降ろし作業において、コンテナ1は可動トロリ3.2の可動マスト3.3にしっかりと連結される。可動マスト3.3には、自動スタッカクレーン3の懸架装置3.4が備えられ、コンテナを収容する。自動スタッカクレーン3は物流管理用DPシステムに接続されて、可動区域内のあらゆる座標にいつでも移動可能である。座標システム(図示せず)は、自動スタッカクレーン3の懸架装置3.4が移動した位置を表示する。自動スタッカクレーン(ACS)に代えて、ガントリクレーンあるいは1足ガントリクレーンを使用してもよい。
【0059】
自動コンテナヤード2は、柵又は壁の仕切5によって積み降ろし区域6から区切られている。積み降ろし区域6において、トラック7はそれぞれ駐車位置8に配置される。図3及び4は、指示された駐車位置8に後ろ向きに入ったトラック7を示している。駐車位置8はコンクリート溝8.1を両側に有しており、トラック7の車輪9をガイドしてトラック7が容易に後ろ向きに駐車できるようにする。トラック7がバックして、駐車位置8を区切る車止め8.2に車輪9が当たると駐車作業は完了する。
【0060】
各駐車位置8には、固定校正カメラ10が仕切5の上に取り付けられている(図5参照)。トラック7の荷台31全体と荷台上のコンテナ1を完全に検知するように、カメラ10の視野角11は選択する。このカメラ10の視野角11によって、モニタ12(図6参照)においてオペレータは駐車作業を観察することができる。
【0061】
図6は、モニタ12で見たカメラ10の映像を示している。この映像によってオペレータは、トラック7の駐車作業及び積み降ろし作業を観察して操作することができる。駐車位置8でトラック7に積載するために、トラック7の荷台31の位置を測定せねばならない。そのために、十字カーソル14などのマーキング手段がカメラ10の映像に重ねられ、オペレータはそれで目印を選択する。この目印は、トラック7の荷台31の固定手段、いわゆるツイストロック13である。ツイストロック13の座標が物流管理用DPシステムに送信される。そのとき、物流管理用DPシステムはツイストロック13をつなぐ対角線16及びこの対角線の交点17を計算する。交点17は座標システムにおける荷台の高さ15を示す。この計算は、正確な位置及び視野方向が分かっている固定設置カメラ10を予め校正することによって可能となる。
【0062】
図7に示すように、スタッカクレーン3の固定マスト3.3に連結されたコンテナ1は、コンテナ1の固定手段をつなぐ対角線の交点が、トラック7の荷台31の固定手段をつなぐ対角線16の交点17の真上に位置するように、トラック7の荷台31の上に配置される。図8に示すように、スタッカクレーン3に設けられたカメラ18により、荷台31上に積むコンテナ1の位置の方法により、カメラ18の視野角19は限定される。20フィート、30フィート、40〜45フィートの異なる寸法のコンテナに応じて、視野角19.1及び19.2がコンテナ1の中心部を除いた左右に必要となる。すなわち、荷台31における対角線16の交点17の座標から後部へ3m〜7mの範囲のカメラ視野42.1と、前部へ3m〜7mのカメラ視野42.2が必要である。コンテナ1に適する荷台31のツイストロック13はこの範囲のみである。
【0063】
図9は、物流管理用DPシステムにおける4分割ユーザ選択画面20を示している。各分割画面は、スタッカクレーン3に備えられた複数のカメラ18のうちの少なくとも1台で撮影された分割画面を表示する。無駄を避けるとともに、信頼性を高めるため、4分割画面は1台のカメラからの、または2台のカメラによる2つの映像からの4つの分割映像を表示してもよい。また同様に、各分割画面に対してそれぞれ1台のカメラを設置してもよい。各分割画面はそれぞれ、荷台31の固定手段であるツイストロック13を表示する。オペレータがツイストロック22の位置のずれを発見するとインターコムを使用して、トラック7の運転手にその位置を修正するように告げる。コンピュータによって計算されたコンテナの輪郭23が画面上に重ねられ、コンテナ1の現在の位置をオペレータに示す。荷台31に対するコンテナ1の配向は、オペレータが十字カーソル24などのマーキング手段を使用して、荷台31の固定手段であるツイストロック13を選択し直すことで修正される。荷台31の固定手段の座標が再び物流管理用DPシステムに送信されて、荷台31の現在の配向が計算される。コンテナ1と荷台31の配向の、場合によって存在するずれが物流管理用DPシステムによって計算されると、マスト3.3のところでコンテナ1は懸架装置3.4によって、コンテナ1の固定手段が全て荷台31の固定手段の真上に位置するように、回転される。
【0064】
図10に示すように、下降作業を始めるときにコンピュータによって計算されたコンテナの輪郭23の上に、下降作業の間中ずっと新たに計算された輪郭が重ねられる。下降作業の最後には、コンテナ1の固定手段がトラック7の荷台31の固定手段に係合する。コンテナ1が配置される際、オペレータはその積載作業をモニタで観察して操作する。
【0065】
図11〜13に、トラック7の荷台31又はコンテナ1の目印を検出する他の方法が示されている。ここでは、前述した方法の作業の順序を並べ替えて示している。
【0066】
図11は、変形例において、場合によってはコンテナ1を積んで到着したトラック7を認識する認識区域25を示している。輸送車両用のナンバープレート28、29と場合によってコンテナ1の識別番号30とを認識区域25に備えられたカメラ27によって検知して、トラック7の認識をする。カメラは物流管理用DPシステムに接続されており、データを送信する。ここで図2に示す作業に加えて、トラック7の場合によって存在するコンテナ1及び/又は空の荷台31が測定される。トラック7は側面32及び上部(上面)33からカメラ27によって検知される。図6に示すような荷台31(又はコンテナ1)の目印の検出を、図6と較べて積み降ろし区域6では行わずに認識区域25で行う。目印の検出方法は前述と同様である。また、固定手段の高さ34、35の自動測定もカメラ27によって行われる。検出されてDPシステムに送信された座標はこのトラック7のみに関する座標であるため、荷降ろしされるコンテナの相対目標位置となる。トラック7に対する一連の認識及び測定作業の後、トラック7の運転手は磁気カード又はICカード(図示せず)による入庫許可証を得る。磁気カードは、作業指示に関するデータも含んでいる。
【0067】
次に、運転手は指示された積み降ろし区域6(図12)にトラック7を移動させ、輸送車両を積み降ろし区域6の任意の駐車位置8に後ろ向きに入れる。図13に示すように、駐車作業の間、物流管理用DPシステムにおいて、駐車位置8に備えられたカメラ36によって認識作業が始められる。この認識作業においてトラック7は認識されると共に、座標システムにおいて幾何学的に分類される(記述せず)。仕切5に備えられたカメラ36からの情報によって、物流管理用DPシステムはトラック7を識別すると共にその位置、つまり、仕切5からの距離37、駐車位置8内の左右の隙間、地面38に対するトラック7のズレ角度を正確に認識することができる。そのため、駐車作業を終えた後には、トラック7の正確な位置は物流管理用DPシステムに把握されている。上記で得た荷台の座標及びコンテナ1の相対目標位置を考慮して、物流管理用DPシステムは積載されるコンテナ1の位置座標を決定する。この位置座標は、積載されるコンテナの絶対目標座標を示している。
【0068】
次に、トラック7の運転手は報告区域39に移動し、磁気カードを使用して、トラック7の積み降ろし準備完了の信号を送る。DPシステムは磁気カードのデータと、トラックが入庫した駐車位置8からのデータとを比較して、一致するとスタッカクレーン3へ指示を出す。スタッカクレーン3は積載されるコンテナ1をコンテナヤード2から選んで図7に示す方法でトラック7への積載を開始する。
【0069】
さらに、図12は許容範囲40を示している。安全上の理由から、各駐車位置8内においてスタッカクレーン3の懸架装置3.4は、この許容範囲40内のみで移動可能である。
【0070】
図14は、参照点41を備えたコンテナヤード2を示している。
【図面の簡単な説明】
【0071】
【図1】コンテナターミナルの概略図である。
【図2】輸送車両を検知する認識区域を示す図である。
【図3】コンテナターミナル、コンテナヤード及び駐車位置を示す図である。
【図4】図3が示す区域の側面図である。
【図5】駐車位置に設置されたカメラの視野角を示す図である。
【図6】第1のユーザ選択画面を示す図である。
【図7】自動コンテナクレーンに備えられたカメラの視野角を示す図である。
【図8】自動コンテナクレーンに備えられたカメラの視野角を示す図である。
【図9】第2のユーザ選択画面の、積載作業中の状態を示す図である。
【図10】ユーザ選択画面の、積載作業完了間際の状態を示す図である。
【図11】目印の検出方法の他の実施例を示す図である。
【図12】他の実施例におけるコンテナターミナル、コンテナヤード、及び駐車位置を示す図である。
【図13】他の実施例における、駐車位置に備えられたカメラの視野角を示す図である。
【図14】参照点の配置を示す図である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、規格コンテナ用のコンテナヤードで使われ物流管理用DPシステムにより操作可能なコンテナ用スタッカクレーンを使用して、コンテナヤードにおいて積み降ろしする方法に関するものであり、そのスタッカクレーンは各コンテナの格納先と、コンテナヤード内を移動できるコンテナ運搬車両の荷台との間を移動可能であり、そのときスタッカクレーンは荷台から又は荷台に収容および/または降ろすために懸架装置を有しており、この装置は荷台に対して方向を変えることができる。
【背景技術】
【0002】
コンテナヤードは、規格コンテナの一時的な収容庫であり、コンテナをある輸送手段から別の輸送手段へ移すことを可能にするためのものである。コンテナの輸送手段としては一般に大型コンテナ船、列車、トラック、トレーラ、あるいはAGV(自動案内車両)などがある。コンテナ積み降ろし港において、コンテナ船から降ろしたコンテナは、陸送されるまで一時的にコンテナヤードに保管される。逆方向ではコンテナが、コンテナ積み降ろし港のコンテナヤードに集められ、引き続いてコンテナ船に積み込まれる。陸送はトラック、トレーラ、列車あるいはAGVにより行われ、本願においては特にトラックで行われる。
【0003】
コンテナヤードにおいて扱われる多数のコンテナは、迅速かつ正確に輸送手段に対して積み降ろしをする必要がある。スタッカクレーンはコンテナをコンテナヤードから輸送車両へ、そしてその逆に運搬する。スタッカクレーンはコンテナ用自動スタッカクレーン(ACS)でもよいし、ガントリクレーン又は1足ガントリクレーンでもよい。現在は、コンテナを輸送手段に移動させるときにはスタッカクレーンを手動で操作している。スタッカクレーンは、ブリッジと、当該ブリッジ上を移動するトロリと、を有しており、ブリッジはレール上を移動する。クレーンに懸架しているコンテナの輸送車両への移動は、オペレータによって手動操作される。積載に際しては、駐車位置にいるオペレータがスタッカクレーンを使用してコンテナを輸送車両の近くまで移動させて、その後ゆっくり“動かして”コンテナを輸送車両に正確に配置する。配置に際しては、ACSを左右及び前後に繰り返し移動させる作業と、コンテナを下降させる作業とをオペレータがその場で操作し監視する。同様に、輸送車両からコンテナを降ろすときには、オペレータが手動でスタッカクレーンをゆっくりコンテナに近づけて、コンテナを収容する。
【0004】
多数のコンテナをコンテナヤード内で扱うにおいては、円滑、正確、迅速、経済的、かつ長期にわたる作業を必要とする。さらに、コンテナの処理量、つまり単位時間に処理するコンテナの数を増加させることが好ましい。これによってコンテナがコンテナヤードに保管される時間、コンテナ船に積載されるまでの時間、および陸送用輸送車両の滞在時間が短縮される。ひいては、コンテナの輸送時間を短縮することにもなる。
コンテナヤードにおいて規格コンテナを扱う公知の方法が下記特許文献1に開示されている。このコンテナヤードは、コンテナの収容庫と、コンテナ用の荷台を備えた輸送車両との間を移動できる、操作可能なコンテナ用スタッカクレーンを有している。このスタッカクレーンは、コンテナを荷台に降ろすため及び荷台から持ち上げるための保持手段を備えており、この保持手段はコンテナ及び荷台に対して方向を変えることができる。またスタッカクレーンは、持ち上げ手段を備えた水平に移動するトロリを有しており、そこからコンテナの保持手段が懸架されている。この懸架装置にはビデオカメラシステムがセンサとして備えられており、自動的に懸架装置をコンテナの上に下げたり、あるいはコンテナを荷台から持ち上げたりできるようにする。さらに、第2のセンサとしてのビデオカメラシステムも懸架装置に備えられており、スタッカクレーンを調整するために使用される。この調整の参照点となる光学装置を備えた壁が、輸送車両の駐車区域内に備えられている。
さらに、コンテナ用の懸架装置を配向させる公知のシステムが下記特許文献2に開示されている。懸架装置はスプレッダとして設計されており、コンテナの角にこのスプレッダを固着するためのツイストロック内にCCDカメラを有している。カメラから得られるビデオ信号によって、オペレータはこのスプレッダをコンテナ上の正しい位置に配置することができる。このシステムはDPシステムに接続して自動的に作動させることも可能である。
【特許文献1】欧州特許公開EP1043262
【特許文献2】国際特許公開WO01/81233
【発明の開示】
【0005】
本発明の課題は、コンテナヤードにおけるコンテナの処理能力を高め、コストを削減し、不具合による不稼働時間の短縮を達成する共に、コンテナヤードの収益性を向上させることにある。
【0006】
この課題は、輸送車両に規格コンテナを積載する本願の請求項1に記載の方法、規格コンテナを積載した輸送車両からコンテナを降ろす請求項2に記載の方法、およびスタッカクレーンの位置を調整する請求項16及び18に記載の方法によって解決される。
【0007】
本発明の利点は、自動化によって可能となる、輸送車両に対する円滑な積み降ろし作業である。本発明において、積み降ろしにおける単純な繰り返し作業はいくつかのステップに分けられ、それぞれが自動化されている。一連の自動化作業は中断されないため手動操作による作業よりも時間短縮が可能であり、その正確な作業によっても積み降ろし作業の時間短縮が可能であることが利点であり、積み替えするコンテナの処理能力を高める。
【0008】
輸送車両へのコンテナの積載は請求項1に記載のステップa)〜f)に従って、段階に分けて行われる。これらのステップを実行することによって規格コンテナを輸送車両に積載する時間を短縮できるため、コンテナヤードにおける処理能力を高めることができる。各ステップの作業を自動化することによる個々の時間短縮が、結果として利益をもたらす積載作業全体の時間短縮につながる。また、作業ミスの回数が減少することによっても、同様に処理能力を高めることができる。
輸送車両からコンテナを降ろす作業は請求項2に記載のステップa)〜f)に従って、段階に分けて行われる。これらのステップを実行することによって規格コンテナを輸送車両から降ろす時間を短縮できるため、コンテナヤードにおける処理能力を高めることができる。作業を自動化することによる各ステップの時間短縮が結果として荷降ろし作業全体の時間短縮につながる。また、作業ミスの回数が減少することによっても、同様に処理能力を高めることができる。
【0009】
本発明の方法において、輸送車両とコンテナとが認識されて発生したデータを物流管理用DPシステムに送信すると好ましい。同時に、物流管理用DPシステムはスタッカクレーンに積載又は荷降ろしの指示を出す。積載指示には、輸送車両に載せるために、スタッカクレーンがコンテナヤードに保管されているコンテナを持ち上げて輸送車両にコンテナを積載することを含んでいる。荷降ろし指示は、スタッカクレーンが輸送車両上のコンテナを持ち上げてコンテナヤードに保管することを含んでいる。作業ステップを平行して行えるため、積み降ろし作業の時間を短縮できて、車両データを検知及び送信するときのミスを減少できる。
【0010】
さらに、校正カメラを使用して輸送車両の荷台上に明示した目印を検知し、その座標を物流管理用DPシステムに送信する。この目印から、DPシステムは、輸送車両の固定手段の座標を調べる(付属する座標システムが、スタッカクレーン懸架装置の固定手段の届く少なくとも一つの空間を決める)。この方法により、コンテナに対する固定手段の位置検知を迅速かつ正確に検知でき、輸送車両に対する積み降ろし時間を短縮することができる。
【0011】
物流管理用DPシステムが目印の座標と、DPシステムに保存されている積載コンテナのデータとを比較して、このコンテナ用の固定手段と、輸送車両の荷台上の位置座標を調べると好ましい。DPシステムに保存されているコンテナの寸法に応じた座標を、調べた輸送車両固定手段の座標とタイミングを合わせて比較する。輸送車両の荷台の寸法が積載されるコンテナに十分な寸法であれば、その輸送車両の固定手段が測定される。輸送車両の荷台が積載されるコンテナ用に充分大きくない場合には、積載作業/操作を早期に中断可能であり、あるいはスタッカクレーンによるコンテナヤードからのコンテナの運搬がタイミング良く中止可能であるため、かなりの時間節約ができる。
【0012】
固定手段の座標を正確に検出すると、駐車位置に配置された輸送車両への積載作業をすぐに始めることができる。そのために、スタッカクレーンはコンピュータ操作によって移動し、積載されるコンテナを輸送車両の荷台に正確に重なるように、位置座標上に運搬する。手動により“そこへ動かすこと”がなくなり、スタッカクレーンを輸送車両上に迅速かつ正確に配置することによって、積載作業時間が短縮される。
さらに、物流管理用DPシステムは、コンテナの取付手段及び位置座標を目印によって決定する。これにより、迅速かつ正確に位置座標を計算し、輸送車両の荷降ろし作業をすぐに始めることができる。
スタッカクレーンはコンピュータ操作によって、コンテナ及び位置座標上に重なるように移動する。迅速かつ正確に懸架装置をコンテナ上に配置する作業から手動操作を除外したことによって、荷降ろし作業時間が短縮される。
【0013】
荷台又はコンテナの固定手段が、スタッカクレーンに備えられた校正カメラによって検知された後、コンテナは必要に応じて、コンテナの固定手段が対応配置した荷台の固定手段の真上にくるように移動される。これにより、迅速でミスがなく正確に、コンテナを荷台の位置に対して合わせることができる。従来の方法のような、駐車位置にいるオペレータによるコンテナを“そこへ動かす” 時間のかかる作業が除外される。それにより、遠隔からオペレータの視覚による監視が少なくとも1台のカメラからの映像によって行えることが利点である。同じように、個々の作業ステップが間断なく続けて行われることによって、積み降ろし時間が短縮される。
【0014】
また、荷台に対してコンテナが正確に配置されるため、コンテナを輸送車両の荷台の上に降ろして、下降作業の最後にコンテナの固定手段を対応する荷台の固定手段にぴったりと係合させることができる。その場にいるオペレータの操作によるコンテナを吊るした懸架装置を“そこへ動かす”という欠点がなくなり、時間短縮が可能となる。コンテナが懸架装置により輸送車両の上に配置され、切り離される。スタッカクレーンによる積載作業は完了する。
さらに、懸架装置の取付手段をコンテナの位置に対して迅速かつ正確に合わせることができるため、懸架装置をコンテナに降ろして、その取付手段をコンテナの取付手段に係合させることができる。オペレータによって手動操作する従来の方法は除外されるて、時間短縮が可能となる。コンテナが輸送車両から取り外された後懸架装置により荷降ろしされて一時的にコンテナヤードに保管されると、スタッカクレーンの荷降ろし作業は完了する。
【0015】
さらに、オペレータが積み降ろし作業の前後や作業中に現場にいる必要がないため、オペレータは他の作業もできるという利点がある。
【0016】
カメラシステムを使って輸送車両を認識すると、特に利点がある。目視及び手動による認識作業を除外したことにより、認識結果は物流管理用DPシステムへ迅速かつ正確に送信される。
【0017】
荷台目印の座標を検出するために、オペレータは物流管理用DPシステムのモニタのユーザ選択画面を使用して、画面上の荷台の目印をマーキング手段で選択する。ユーザ選択画面にはカメラシステムからの画像が表示される。オペレータがマーキング手段によってユーザ選択画面上に表示した輸送車両の荷台の目印を選択することで、輸送車両荷台の固定手段の座標を正確に検出して、迅速な計算を行うことができる。
【0018】
また、荷台目印の座標をコンピュータシステムにより自動的に検出して、物流管理システムへ送信することにより、更に積み降ろし時間を短縮できる自動化を実現できる。
【0019】
請求項1に記載の位置座標を決定するステップは、異なる2つの方法によって実現可能である。1つは、積み降ろし区域において輸送車両の荷台座標を検出する方法が好ましい。このとき輸送車両はすでに認識されており、積載されるコンテナも積載指示で決まっている。これによって、物流管理用DPシステムは、積載されるコンテナを輸送車両が収容可能かどうかを早期に判断できる。輸送車両荷台の固定手段が正常に認識されれば、積載作業が続行され、認識されなければ、積載作業が開始されていた場合には、中止される。
【0020】
輸送車両荷台の座標が最終的に積み降ろし区域において検出されると、荷台の高さ及び荷台目印の対角線の交点により表示される位置座標は、コンテナの絶対目標位置となる。それにより位置調整は特に巧妙となり、迅速に短時間で、コンテナを積んだ自動スタッカクレーンを積載する荷台上に配置することができる。
【0021】
同様に好ましいのは、位置座標を調べるための請求項1に記載しているステップの本願による別の構成である。このとき、輸送車両荷台の座標は認識区域において検出される。これによって、物流管理用DPシステムは、輸送車両がコンテナを収容可能かどうかを早期に判断できる。輸送車両の荷台の固定手段が正しい位置にあると、積載作業が続行され、その他の場合には、積載作業が開始されていた場合でも中止される。
【0022】
輸送車両荷台の座標検知が認識区域で行われるので、検知した荷台の座標は輸送車両に関するものである。このため、荷台の高さと、荷台の目印を結ぶ対角線の交点とはコンテナの相対目標位置となる。
コンテナの位置座票はコンテナの目印の高さと、コンテナの目印を結ぶ対角線の交点とによって決定され、コンテナ上の相対目標位置を示す。コンテナの目印(取付手段)を位置座票として選択することによって、オープントップコンテナ、タンクコンテナ及び/又はフラットコンテナのような、天井部のない標準コンテナも荷降ろしをすることができる。このような位置座票の選択により、迅速に短時間で、自動スタッカクレーンを荷降ろしするコンテナ上に配置することができる。
【0023】
認識区域において検出された荷台の位置座標は輸送車両のみに関する座標であるため、コンテナの相対目標位置となる。この位置座標を、カメラを使って調べた駐車位置に配置の輸送車両座標に、コンテナの相対目標位置を重ねたコンテナの絶対目標位置により示すと好ましい。認識区域においてあらかじめ検出された座標は、物流管理用DPシステムによって、駐車位置において認識された輸送車両の位置と比較される。この比較結果が、コンテナの絶対目標位置となる位置座標である。この結果、後述するように、巧妙にかつ短時間で、コンテナを積んだ自動スタッカクレーンを積み降ろしする荷台上に配置することができる。
【0024】
座標を検出する場所に関係なく、一つまたは複数の固定手段の位置が誤っていればDPシステムのユーザ選択画面で明らかになる。オペレータがそれに気づいて、輸送車両の運転手に連絡する。運転手が固定手段位置の不時のミスをタイミング良く修正する。
【0025】
座標を検出するどちらの方法においても、位置座標を好ましく選択することにより、コンテナ固定手段を結ぶ対角線の交点が荷台固定手段の対角線を結ぶ交点の真上に来るように、懸架装置がコンテナを荷台の届く範囲に移動することが可能になる。従って、スタッカクレーンから吊るされたコンテナは荷台の真上に配置された後、場合によっては次にステップにおいて懸架装置から吊るされたコンテナの回転によって方向を変えねばならない。このときスタッカクレーンが移動する必要はなく、すなわち、ACSのブリッジと、その上を移動するトロリはすでに積載位置にある。懸架装置をオペレータが操作して少しずつ動かす作業は除外されることが利点である。この結果、懸架装置の位置調整が非常に簡易化されるため、積み降ろしに必要な時間を大幅に短縮することができる。
【0026】
オペレータによる積み降ろし作業のコントロールは、各1対の固定手段を表示する4分割された第二ユーザ選択画面によって簡易化され、そのときその対は、カメラシステムの画像から切り取られた荷台の固定手段、およびコンピュータ計算したコンテナを含めた固定手段の輪郭を画面上で重ねたコンテナの対応する固定手段で構成している。これによって、オペレータは駐車位置にいなくても、積み降ろし作業をコントロールすることができる。
【0027】
さらに、本発明において、物流管理システムの第2のユーザ選択画面はマーキング手段を有しており、オペレータは荷台上の目印を1つ以上選択できる。これにより、場合によっては発生する積載コンテナと荷台位置のずれを、精密位置決めするために物流管理用DPシステムによって決めることができるという利点がある。そのようにして調べた正確な荷台の配向が、荷台に対するコンテナ位置決めのために必要である。物流管理用DPシステムによってずれが認識されると、次のステップにおいて、コンテナが位置調整される。荷台の位置を容易に検知すること、また物流管理用DPシステムのデータを直接利用してデータの誤りを排除することによって、特に大きく作業時間を短縮できる。
【0028】
同じく本発明の構成において、積載されるコンテナと荷台の位置の、場合により発生するずれを、精密位置決めのためにコンピュータシステムによって自動的に認識できるという利点がある。
【0029】
積載されるコンテナと荷台の位置、あるいは懸架装置と荷降ろしされるコンテナの位置にずれがあった場合、コンテナ又は懸架装置の取付手段が荷台又はコンテナの取付手段の真上に配置されるように、コンテナ又は懸架装置は回転される。このように、コンテナを荷台に対して、あるいは懸架装置をコンテナに対して迅速かつ正確に方向転換させる作業は、コンピュータによって計算されたずれに基づいて自動的に行われる。例えば平坦でない地面において輸送車両がその縦方向及び/又は横方向に傾いても、積み降ろし作業に悪影響を及ぼさない、という大きな利点がある。コンテナを積んだ懸架装置を荷台に、あるいは懸架装置をコンテナに対して少しずつ動かす作業が除外されるため、輸送車両への積み降ろしに必要な時間を極端に短縮できる。
【0030】
懸架装置からコンテナを離して積載する作業あるいは懸架装置をコンテナに近づけて吊り上げる作業、及び取付手段を係合する作業は、オペレータの操作あるいはコンピュータシステムによって自動的に行われる。コンテナ又は懸架装置が荷台又はコンテナの真上に配置されて正確に位置調整されると共に、DPシステムが荷台又はコンテナの高さを決めるので、コンテナ又は懸架装置が配置される作業は迅速かつ連続的に行われ、手動による作業よりも早く完了させることができる。コンテナの積載作業は、コンテナと荷台の固定手段が係合すると完了する。懸架装置からコンテナが降ろされて圧力センサがそれを表示すると、コンテナは懸架装置から離されて輸送車両に固定される。コンテナを吊り上げる作業は、懸架装置とコンテナの取付手段が係合すると完了する。懸架装置に係合されたコンテナはスタッカクレーンによってコンテナヤードに一時的に保管される。こうして、荷降ろし作業が完了する。
【0031】
【0032】
【0033】
【0034】
【0035】
【0036】
【0037】
【0038】
【0039】
【0040】
【0041】
【0042】
【0043】
【0044】
【0045】
【0046】
【0047】
【0048】
【0049】
【0050】
【0051】
一連の作業ステップによって、輸送車両に対する積み降ろし作業時間が早くなり、このようにして節約された時間は次の積み降ろし作業に利用することができる。したがって、コンテナヤードのコンテナ処理能力が高まり、効率アップが図られ、貨物輸送の時間短縮が可能になる。
【0052】
さらに、請求項16に記載の方法によって、スタッカクレーンの調整を常時、低費用で行えるという利点がある。スタッカクレーン用のカメラにおいて、構造部品公差、製造公差、レンズの不均質、及び/又は光学的誤差によって幾何学的偏差が生じるが、カメラを使用する前に校正することで回避される。スタッカクレーン用のカメラからの画像は、校正による補正アルゴリズムによって、操作中に常に修正される。カメラ固有の補正アルゴリズムが、物流管理用DPシステムによるカメラの各画像に適用される。したがって、各補正アルゴリズムの適用の下で、各カメラは所定の光学特性を持つことになる。さらに、使用前に校正することよって物流管理用DPシステムは、観察され既知の対象物の間隔を光学の法則に従って測定できる。
【0053】
この校正カメラを使用して、スタッカクレーンの位置調整を行える。請求項16によれば、スタッカクレーンはまずコンテナヤード内の任意の位置に配置された参照点に移動して、カメラシステムのうち1台以上のカメラが参照点をとらえるようにする。物流管理用DPシステムはカメラの画像から計算した新しい参照点の位置と、既知の参照点の位置とを比較して、誤差を発見した場合はスタッカクレーンのずれを測定する。参照点は通常移動しないので、物流管理用DPシステムによって計算されたスタッカクレーンの位置にずれの分を足して、スタッカクレーンの位置座標を修正できる。この方法は、コンテナ用自動スタッカクレーン(ACS)のレールの長さが、夏季や冬季の温度変化による膨張や縮小によって変わった場合などに有効である。物流管理用DPシステムは、スタッカクレーンの絶対移動距離によってその位置を計算するが、温度変化やスタッカクレーンが実際に移動した距離などを考慮して、物流管理用DPシステムによって計算された位置と置き換えることができる。これによって、様々な要因によって実際の位置と異なって計算されたスタッカクレーンの位置を修正することができるという利点がある。この方法によって、いつでも所望のときに頻繁にスタッカクレーンをすぐに調整できるという特別の利点がある。
【0054】
コンテナヤード内に複数の参照点を設ける、と特に利点がある。スタッカクレーンを1つの参照点上に配置した後、物流管理用DPシステムはデータ内の参照点の位置と、カメラの画像から新たに計算された位置とを比較して、参照点に対するスタッカクレーンのずれを計算する。複数の参照点がスタッカクレーンの移動線上に配置されている状態で、狭い時間領域内で1つの参照点に見られるずれが偶然誤差であった場合、その参照点の近傍において地面の変形があることを指している。これを考慮して、物流管理用DPシステムはスタッカクレーンの位置計算を修正する。この結果、膨張による誤差の発生を避けることができる。
【0055】
コンテナヤード内に超参照点を設けて、これに対してスタッカクレーンのカメラを調整する、と特に利点がある。技術的欠陥などによってスタッカクレーンのカメラを取り替えた場合に、スタッカクレーンで新しいカメラの初期調整をする必要がある。超参照点を使用することによって、物流管理用DPシステムにより、修正軌道をスタッカクレーンの新しいカメラに対して決定する。この方法によって、修理及び調整にかかる時間と、それによるスタッカクレーンの作業中断時間を短縮できるという利点がある。超参照点をコンテナヤード内の、上記したような外的影響を受けない場所に設けると好ましい。スタッカクレーンは、校正された新しいカメラを備えられて超参照点の上に移動し、新しいカメラがそれを検知するようにする。DPシステムは超参照点の位置を測定し、データ内の超参照点の位置と比較する。誤差があれば、修正軌道を新しいカメラに適用し、このカメラに基づいて行う位置計算に使用する。スタッカクレーンの新しいカメラを迅速に調整することによって節約された時間を、積み降ろし作業に利用することができる。
【発明を実施するための最良の形態】
【0056】
図1は、コンテナ1用の自動コンテナターミナル24を示している。このターミナルの陸側で、コンテナ1がトラック7(図2参照)に積み下ろしされる。認識区域25では、出入りするトラックが認識及び/又は測定される。到着したトラック7は認識されて、積み降ろしに必要なデータが物流管理用DPシステム(図示せず)に送信される。この後、トラック7は車道26を通過して積み降ろし区域6へ移動する。
【0057】
図2は、認識区域25に設けられてトラック7をあらゆる方向から感知するカメラ27を示している。トラック7のプレートナンバ28場合によってはトレーラ7.1のプレートナンバ29がカメラ27に検知される。同様に、トラック7に積荷がある場合にはコンテナ1の識別番号30も検知される。トラック7、トレーラ7.1、場合によってはコンテナ1に関するあらゆる情報が物流管理用DPシステムに送信されて、システム上で常時利用可能となり、オペレータ(図示せず)が検索できるようになる。
【0058】
図3及び4に示すように、自動コンテナヤード2にコンテナ1が積み重ねられて収容される。自動スタッカクレーン3はブリッジ3.1上を移動する可動トロリ3.2を有しており、ブリッジ3.1はクレーン軌道4上を移動する。積み降ろし作業において、コンテナ1は可動トロリ3.2の可動マスト3.3にしっかりと連結される。可動マスト3.3には、自動スタッカクレーン3の懸架装置3.4が備えられ、コンテナを収容する。自動スタッカクレーン3は物流管理用DPシステムに接続されて、可動区域内のあらゆる座標にいつでも移動可能である。座標システム(図示せず)は、自動スタッカクレーン3の懸架装置3.4が移動した位置を表示する。自動スタッカクレーン(ACS)に代えて、ガントリクレーンあるいは1足ガントリクレーンを使用してもよい。
【0059】
自動コンテナヤード2は、柵又は壁の仕切5によって積み降ろし区域6から区切られている。積み降ろし区域6において、トラック7はそれぞれ駐車位置8に配置される。図3及び4は、指示された駐車位置8に後ろ向きに入ったトラック7を示している。駐車位置8はコンクリート溝8.1を両側に有しており、トラック7の車輪9をガイドしてトラック7が容易に後ろ向きに駐車できるようにする。トラック7がバックして、駐車位置8を区切る車止め8.2に車輪9が当たると駐車作業は完了する。
【0060】
各駐車位置8には、固定校正カメラ10が仕切5の上に取り付けられている(図5参照)。トラック7の荷台31全体と荷台上のコンテナ1を完全に検知するように、カメラ10の視野角11は選択する。このカメラ10の視野角11によって、モニタ12(図6参照)においてオペレータは駐車作業を観察することができる。
【0061】
図6は、モニタ12で見たカメラ10の映像を示している。この映像によってオペレータは、トラック7の駐車作業及び積み降ろし作業を観察して操作することができる。駐車位置8でトラック7に積載するために、トラック7の荷台31の位置を測定せねばならない。そのために、十字カーソル14などのマーキング手段がカメラ10の映像に重ねられ、オペレータはそれで目印を選択する。この目印は、トラック7の荷台31の固定手段、いわゆるツイストロック13である。ツイストロック13の座標が物流管理用DPシステムに送信される。そのとき、物流管理用DPシステムはツイストロック13をつなぐ対角線16及びこの対角線の交点17を計算する。交点17は座標システムにおける荷台の高さ15を示す。この計算は、正確な位置及び視野方向が分かっている固定設置カメラ10を予め校正することによって可能となる。
【0062】
図7に示すように、スタッカクレーン3の固定マスト3.3に連結されたコンテナ1は、コンテナ1の固定手段をつなぐ対角線の交点が、トラック7の荷台31の固定手段をつなぐ対角線16の交点17の真上に位置するように、トラック7の荷台31の上に配置される。図8に示すように、スタッカクレーン3に設けられたカメラ18により、荷台31上に積むコンテナ1の位置の方法により、カメラ18の視野角19は限定される。20フィート、30フィート、40〜45フィートの異なる寸法のコンテナに応じて、視野角19.1及び19.2がコンテナ1の中心部を除いた左右に必要となる。すなわち、荷台31における対角線16の交点17の座標から後部へ3m〜7mの範囲のカメラ視野42.1と、前部へ3m〜7mのカメラ視野42.2が必要である。コンテナ1に適する荷台31のツイストロック13はこの範囲のみである。
【0063】
図9は、物流管理用DPシステムにおける4分割ユーザ選択画面20を示している。各分割画面は、スタッカクレーン3に備えられた複数のカメラ18のうちの少なくとも1台で撮影された分割画面を表示する。無駄を避けるとともに、信頼性を高めるため、4分割画面は1台のカメラからの、または2台のカメラによる2つの映像からの4つの分割映像を表示してもよい。また同様に、各分割画面に対してそれぞれ1台のカメラを設置してもよい。各分割画面はそれぞれ、荷台31の固定手段であるツイストロック13を表示する。オペレータがツイストロック22の位置のずれを発見するとインターコムを使用して、トラック7の運転手にその位置を修正するように告げる。コンピュータによって計算されたコンテナの輪郭23が画面上に重ねられ、コンテナ1の現在の位置をオペレータに示す。荷台31に対するコンテナ1の配向は、オペレータが十字カーソル24などのマーキング手段を使用して、荷台31の固定手段であるツイストロック13を選択し直すことで修正される。荷台31の固定手段の座標が再び物流管理用DPシステムに送信されて、荷台31の現在の配向が計算される。コンテナ1と荷台31の配向の、場合によって存在するずれが物流管理用DPシステムによって計算されると、マスト3.3のところでコンテナ1は懸架装置3.4によって、コンテナ1の固定手段が全て荷台31の固定手段の真上に位置するように、回転される。
【0064】
図10に示すように、下降作業を始めるときにコンピュータによって計算されたコンテナの輪郭23の上に、下降作業の間中ずっと新たに計算された輪郭が重ねられる。下降作業の最後には、コンテナ1の固定手段がトラック7の荷台31の固定手段に係合する。コンテナ1が配置される際、オペレータはその積載作業をモニタで観察して操作する。
【0065】
図11〜13に、トラック7の荷台31又はコンテナ1の目印を検出する他の方法が示されている。ここでは、前述した方法の作業の順序を並べ替えて示している。
【0066】
図11は、変形例において、場合によってはコンテナ1を積んで到着したトラック7を認識する認識区域25を示している。輸送車両用のナンバープレート28、29と場合によってコンテナ1の識別番号30とを認識区域25に備えられたカメラ27によって検知して、トラック7の認識をする。カメラは物流管理用DPシステムに接続されており、データを送信する。ここで図2に示す作業に加えて、トラック7の場合によって存在するコンテナ1及び/又は空の荷台31が測定される。トラック7は側面32及び上部(上面)33からカメラ27によって検知される。図6に示すような荷台31(又はコンテナ1)の目印の検出を、図6と較べて積み降ろし区域6では行わずに認識区域25で行う。目印の検出方法は前述と同様である。また、固定手段の高さ34、35の自動測定もカメラ27によって行われる。検出されてDPシステムに送信された座標はこのトラック7のみに関する座標であるため、荷降ろしされるコンテナの相対目標位置となる。トラック7に対する一連の認識及び測定作業の後、トラック7の運転手は磁気カード又はICカード(図示せず)による入庫許可証を得る。磁気カードは、作業指示に関するデータも含んでいる。
【0067】
次に、運転手は指示された積み降ろし区域6(図12)にトラック7を移動させ、輸送車両を積み降ろし区域6の任意の駐車位置8に後ろ向きに入れる。図13に示すように、駐車作業の間、物流管理用DPシステムにおいて、駐車位置8に備えられたカメラ36によって認識作業が始められる。この認識作業においてトラック7は認識されると共に、座標システムにおいて幾何学的に分類される(記述せず)。仕切5に備えられたカメラ36からの情報によって、物流管理用DPシステムはトラック7を識別すると共にその位置、つまり、仕切5からの距離37、駐車位置8内の左右の隙間、地面38に対するトラック7のズレ角度を正確に認識することができる。そのため、駐車作業を終えた後には、トラック7の正確な位置は物流管理用DPシステムに把握されている。上記で得た荷台の座標及びコンテナ1の相対目標位置を考慮して、物流管理用DPシステムは積載されるコンテナ1の位置座標を決定する。この位置座標は、積載されるコンテナの絶対目標座標を示している。
【0068】
次に、トラック7の運転手は報告区域39に移動し、磁気カードを使用して、トラック7の積み降ろし準備完了の信号を送る。DPシステムは磁気カードのデータと、トラックが入庫した駐車位置8からのデータとを比較して、一致するとスタッカクレーン3へ指示を出す。スタッカクレーン3は積載されるコンテナ1をコンテナヤード2から選んで図7に示す方法でトラック7への積載を開始する。
【0069】
さらに、図12は許容範囲40を示している。安全上の理由から、各駐車位置8内においてスタッカクレーン3の懸架装置3.4は、この許容範囲40内のみで移動可能である。
【0070】
図14は、参照点41を備えたコンテナヤード2を示している。
【図面の簡単な説明】
【0071】
【図1】コンテナターミナルの概略図である。
【図2】輸送車両を検知する認識区域を示す図である。
【図3】コンテナターミナルの一部であるコンテナヤード及び駐車位置を示す図である。
【図4】図3が示す区域の側面図である。
【図5】駐車位置に設置されたカメラの視野角を示す図である。
【図6】第1のユーザ選択画面を示す図である。
【図7】自動コンテナクレーンに備えられたカメラの視野角を示す図である。
【図8】自動コンテナクレーンに備えられたカメラの視野角を示す図である。
【図9】第2のユーザ選択画面の、積載作業中の状態を示す図である。
【図10】ユーザ選択画面の、積載作業完了間際の状態を示す図である。
【図11】目印の検出方法の他の実施例を示す図である。
【図12】他の実施例におけるコンテナターミナル、コンテナヤード、及び駐車位置を示す図である。
【図13】他の実施例における、駐車位置に備えられたカメラの視野角を示す図である。
【図14】参照点の配置を示す図である。
【特許請求の範囲】
【請求項1】
規格コンテナ用のコンテナヤードにおいて、コンテナヤードのコンテナ用のスタッカクレーンを使用する積み降ろし方法であって、前記スタッカクレーンは物流管理用DPシステムによって操作可能であると共に、各前記コンテナの保管場所とコンテナヤード内で移動できる輸送車両の荷台との間を移動可能であり、前記スタッカクレーンは前記コンテナを前記荷台に降ろすための懸架装置を有しており、前記懸架装置は前記荷台に合わせて位置調整可能である場合において、
前記輸送車両への積載の際に、
a)前記輸送車両が認識されて発生したデータを前記物流管理用DPシステムに送信するステップと、
b)校正カメラを使用して、前記輸送車両の前記荷台上の目印を検出して、その座標を前記物流管理用DPシステムへ送信するステップと、
c)前記物流管理用DPシステムが前記目印の前記座標と、前記DPシステムに保存されているコンテナのデータとを比較して、前記輸送車両の前記荷台上にありこのコンテナに適合する固定手段と位置座標とを決定するステップと、
d)前記スタッカクレーンが積載するコンテナと共に、コンピュータ操作によって前記輸送車両の前記荷台の上方で、前記位置座標の真上に移動するステップと、
e)前記スタッカクレーンに備えられた校正カメラを使用して、前記荷台の固定を検知した後、必要に応じて前記コンテナを移動して前記コンテナの固定手段を前記荷台の前記位置座標にある固定手段の真上に配置するステップと、
f)前記コンテナを前記輸送車両の前記荷台の上に降ろして、下降作業の最後には前記コンテナの前記固定手段を前記荷台の関連配置した前記固定手段に係合させるステップと、
を含むことを特徴とする、積み降ろし方法。
【請求項2】
規格コンテナ用のコンテナヤードにおいて、コンテナヤードのコンテナ用のスタッカクレーンを使用する積み降ろし方法であって、前記スタッカクレーンは物流管理用DPシステムによって操作可能であると共に、各前記コンテナの保管場所とコンテナヤード内で移動できる輸送車両の荷台との間を移動可能であり、前記スタッカクレーンは前記コンテナを前記荷台からピックアップするための懸架装置を有しており、前記懸架装置は前記荷台に合わせて位置調整可能である場合において、
前記輸送車両からの荷降ろしの際に、
a)前記輸送車両と荷降ろしされるコンテナを認識し、それにより発生したデータを物流管理用DPシステムへ送信するステップと、
b)校正カメラを使用して、前記コンテナの目印を検知し、その座標を前記物流管理用DPシステムへ送信するステップと、
c)前記物流管理用DPシステムが、前記目印に基づき、前記コンテナの固定手段と位置座標を決定するステップと、
d)前記スタッカクレーンがコンピュータ操作によって前記コンテナ上の前記位置座標の真上に移動するステップと、
e)前記スタッカクレーンに備えられた校正カメラを使用して、前記コンテナの固定手段を検知した後、必要に応じて前記懸架装置を移動して、前記スタッカクレーンの前記懸架装置の固定手段を前記コンテナの前記位置座標にある前記固定手段の真上に配置させるステップと、
f)前記懸架装置を前記コンテナに近づけて、前記懸架装置の前記固定手段を前記コンテナの前記固定手段に係合させるステップと、
を含むことを特徴とする、積み降ろし方法。
【請求項3】
前記輸送車輛又は荷降ろしされる前記コンテナの輸送車両がカメラシステムによって認識されることを特徴とする、請求項1又は2に記載の積み降ろし方法。
【請求項4】
前記荷台の前記目印又は前記コンテナの前記目印の前記座標を決定するために、オペレータは前記物流管理用DPシステムのモニタのユーザ選択画面において、前記荷台の前記目印又は前記コンテナの前記目印をマーキング手段で選択することを特徴とする、請求項1〜3のいずれか1つに記載の積み降ろし方法。
【請求項5】
前記荷台の前記目印又は前記コンテナの前記目印の前記座標がコンピュータシステムによって自動的に検出され前記物流管理システムに送信されることを特徴とする、請求項1〜4のいずれか1つに記載の積み降ろし方法。
【請求項6】
前記輸送車両の前記荷台の前記座標の検出及び前記コンテナの座標の検出を積み降ろし区域で行うことを特徴とする、請求項1〜5のいずれか1つに記載の積み降ろし方法。
【請求項7】
位置座標を、荷台の竪方向位置により、そして荷台目印の対角線交点により示し、それがコンテナの絶対目標位置を示し、ないしコンテナ目印上端の竪方向位置により又はコンテナ目印の対角線交点により示し、それが懸架装置の絶対目標位置を示すことを特徴とする、請求項1〜5のいずれか1つに記載の積み降ろし方法。
【請求項8】
前記輸送車両の前記荷台の座標又は前記コンテナの座標の検出を認識区域で行うことを特徴とする、請求項1〜7のいずれか1つに記載の積み降ろし方法。
【請求項9】
前記荷台の高さ及び前記荷台の前記目印を結ぶ前記対角線の前記交点、あるいは、前記コンテナにおける前記目印の前記上端の高さ及び前記コンテナの前記目印を結ぶ前記対角線の前記交点は、コンテナの相対目標位置であることを特徴とする、請求項1〜8のいずれか1つに記載の積み降ろし方法。
【請求項10】
前記位置座標は前記コンテナ又は前記懸架装置の絶対目標位置となり、カメラによって検出された駐車位置における輸送車両の座標と、前記コンテナ又は前記懸架装置の相対目標位置とによって決定されることを特徴とする、請求項1〜9のいずれか1つに記載の積み降ろし方法。
【請求項11】
前記スタッカクレーンは、前記コンテナまたは前記懸架装置の前記固定手段を結ぶ前記対角線の前記交点が、前記荷台または前記懸架装置の前記固定手段を結ぶ前記対角線の前記交点の真上なるように、前記荷台又は前記コンテナの範囲内で動くことを特徴とする、請求項1〜10のいずれか1つに記載の積み降ろし方法。
【請求項12】
第2のユーザ選択画面が4分割画面を有し、各分割画面は、それぞれ1対の固定手段を表示しており、各1対の固定手段の一方は前記カメラシステムによって画像送信された前記荷台又は前記コンテナの固定手段であり、他方は前記コンテナ又は前記懸架装置そして前記コンテナないし前記懸架装置の固定手段のコンピュータで計算した輪郭を画像上で重ねた前記コンテナ又は前記懸架装置の対応する固定手段であることを特徴とする、請求項1〜11のいずれか1つに記載の積み降ろし方法。
【請求項13】
前記第2のユーザ選択画面が有するマーキング手段を使用し、前記荷台又は前記コンテナにおける少なくとも1つの目印をオペレータが選択して、積載されるコンテナの位置と前記荷台の位置との誤差、あるいは、前記懸架装置の位置と荷降ろしされるコンテナの位置との誤差を、微調整のために前記物流管理用DPシステムで計算することを特徴とする、請求項1〜12のいずれか1つに記載の積み降ろし方法。
【請求項14】
前記積載されるコンテナの位置と前記荷台の位置との誤差、あるいは、前記懸架装置の位置と前記荷降ろしされるコンテナの位置との誤差を微調整するためにコンピュータシステムが自動的に認識することを特徴とする、請求項1〜13のいずれか1つに記載の積み降ろし方法。
【請求項15】
前記積載されるコンテナの位置と前記荷台の位置、あるいは、前記懸架装置の位置と前記荷降ろしされるコンテナの位置に誤差があれば、前記コンテナの前記固定手段が前記荷台の前記固定手段の真上に、あるいは、前記懸架装置の前記固定手段が前記コンテナの前記固定手段の真上となるように前記懸架装置が回転することを特徴とする、請求項1〜14のいずれか1つに記載の積み降ろし方法。
【請求項16】
前記コンテナを前記懸架装置に乗せて荷台へと降ろす作業、あるいは前記スタッカクレーンの前記懸架装置を前記コンテナへ降ろす作業において、前記固定手段が互いに係合するまでオペレータによって操作されることを特徴とする、請求項1〜15のいずれか1つに記載の積み降ろし方法。
【請求項17】
請求項1または2および3〜16のいずれかまたは幾つかに記載の方法を実行するため、積み替えするコンテナの位置を検知するために前記スタッカクレーンに取り付けられたカメラシステムと、前記スタッカクレーンの位置を検知するための絶対位置計算システムとを使って、コンテナヤードにおいてスタッカクレーンの位置を調整する方法であって、
前記カメラは校正カメラであり、
a)前記スタッカクレーンがコンテナヤード内の任意の位置に備えた参照点の上を移動し、前記カメラシステムのうち少なくとも1台のカメラが前記参照点を検知するステップと、
b)物流管理用DPシステムが前記参照点の位置と、記憶された参照点の位置とを比較して、誤差が生じた場合にはその距離を計算するステップと、
を含むことを特徴とする、スタッカクレーンの位置を調整する方法。
【請求項18】
前記コンテナヤードは、前記スタッカクレーンの前記カメラによって検知される複数の参照点を有している、ことを特徴とする、請求項17に記載の方法。
【請求項19】
請求項1または2および3〜16のいずれかまたは幾つかに記載の方法を実行するため、積み替えするコンテナの位置を検出するために前記スタッカクレーンに取り付けられたカメラと、前記スタッカクレーンの位置を検知するための絶対位置計算システムを使って、コンテナヤードに備えられたスタッカクレーンのカメラの位置を調整する方法であって、
前記コンテナヤードは超参照点を有しており、スタッカクレーンに前記超参照点を使ってこれに対して調整できる前記カメラが設けられていることを特徴とする、カメラの位置を調整する方法。
【特許請求の範囲】
【請求項1】
規格コンテナ用のコンテナヤードにおいて、コンテナヤードのコンテナ用のスタッカクレーンを使用する積み降ろし方法であって、前記スタッカクレーンは物流管理用DPシステムによって操作可能であると共に、各前記コンテナの保管場所とコンテナヤード内で移動できる輸送車両の荷台との間を移動可能であり、前記スタッカクレーンは前記コンテナを前記荷台に降ろすための懸架装置を有しており、前記懸架装置は前記荷台に合わせて位置調整可能である場合において、
前記輸送車両への積載の際に、
a)前記輸送車両が認識されて発生したデータを前記物流管理用DPシステムに送信するステップと、
b)校正カメラを使用して、前記輸送車両の前記荷台上の目印を検出して、その座標を前記物流管理用DPシステムへ送信するステップと、
c)前記物流管理用DPシステムが前記目印の前記座標と、前記DPシステムに保存されているコンテナのデータとを比較して、前記輸送車両の前記荷台上にありこのコンテナに適合する固定手段と位置座標とを決定するステップと、
d)前記スタッカクレーンが積載するコンテナと共に、コンピュータ操作によって前記輸送車両の前記荷台の上方で、前記位置座標の真上に移動するステップと、
e)前記スタッカクレーンに備えられた校正カメラを使用して、前記荷台の固定を検知した後、必要に応じて前記コンテナを移動して前記コンテナの固定手段を前記荷台の前記位置座標にある固定手段の真上に配置するステップと、
f)前記コンテナを前記輸送車両の前記荷台の上に降ろして、下降作業の最後には前記コンテナの前記固定手段を前記荷台の関連配置した前記固定手段に係合させるステップと、
を含むことを特徴とする、積み降ろし方法。
【請求項2】
規格コンテナ用のコンテナヤードにおいて、コンテナヤードのコンテナ用のスタッカクレーンを使用する積み降ろし方法であって、前記スタッカクレーンは物流管理用DPシステムによって操作可能であると共に、各前記コンテナの保管場所とコンテナヤード内で移動できる輸送車両の荷台との間を移動可能であり、前記スタッカクレーンは前記コンテナを前記荷台からピックアップするための懸架装置を有しており、前記懸架装置は前記荷台に合わせて位置調整可能である場合において、
前記輸送車両からの荷降ろしの際に、
a)前記輸送車両と荷降ろしされるコンテナを認識し、それにより発生したデータを物流管理用DPシステムへ送信するステップと、
b)校正カメラを使用して、前記コンテナの目印を検知し、その座標を前記物流管理用DPシステムへ送信するステップと、
c)前記物流管理用DPシステムが、前記目印に基づき、前記コンテナの固定手段と位置座標を決定するステップと、
d)前記スタッカクレーンがコンピュータ操作によって前記コンテナ上の前記位置座標の真上に移動するステップと、
e)前記スタッカクレーンに備えられた校正カメラを使用して、前記コンテナの固定手段を検知した後、必要に応じて前記懸架装置を移動して、前記スタッカクレーンの前記懸架装置の固定手段を前記コンテナの前記位置座標にある前記固定手段の真上に配置させるステップと、
f)前記懸架装置を前記コンテナに近づけて、前記懸架装置の前記固定手段を前記コンテナの前記固定手段に係合させるステップと、
を含むことを特徴とする、積み降ろし方法。
【請求項3】
前記輸送車輛又は荷降ろしされる前記コンテナの輸送車両がカメラシステムによって認識されることを特徴とする、請求項1又は2に記載の積み降ろし方法。
【請求項4】
前記荷台の前記目印又は前記コンテナの前記目印の前記座標を決定するために、オペレータは前記物流管理用DPシステムのモニタのユーザ選択画面において、前記荷台の前記目印又は前記コンテナの前記目印をマーキング手段で選択することを特徴とする、請求項1〜3のいずれか1つに記載の積み降ろし方法。
【請求項5】
前記荷台の前記目印又は前記コンテナの前記目印の前記座標がコンピュータシステムによって自動的に検出され前記物流管理システムに送信されることを特徴とする、請求項1〜4のいずれか1つに記載の積み降ろし方法。
【請求項6】
前記輸送車両の前記荷台の前記座標の検出及び前記コンテナの座標の検出を積み降ろし区域で行うことを特徴とする、請求項1〜5のいずれか1つに記載の積み降ろし方法。
【請求項7】
前記輸送車両の前記荷台の座標又は前記コンテナの座標の検出を認識区域で行うことを特徴とする、請求項1〜6のいずれか1つに記載の積み降ろし方法。
【請求項8】
前記荷台の高さ及び前記荷台の前記目印を結ぶ前記対角線の前記交点、あるいは、前記コンテナにおける前記目印の前記上端の高さ及び前記コンテナの前記目印を結ぶ前記対角線の前記交点は、コンテナの相対目標位置であることを特徴とする、請求項1〜7のいずれか1つに記載の積み降ろし方法。
【請求項9】
前記位置座標は前記コンテナ又は前記懸架装置の絶対目標位置となり、カメラによって検出された駐車位置における輸送車両の座標と、前記コンテナ又は前記懸架装置の相対目標位置とによって決定されることを特徴とする、請求項1〜8のいずれか1つに記載の積み降ろし方法。
【請求項10】
前記スタッカクレーンは、前記コンテナまたは前記懸架装置の前記固定手段を結ぶ前記対角線の前記交点が、前記荷台または前記懸架装置の前記固定手段を結ぶ前記対角線の前記交点の真上なるように、前記荷台又は前記コンテナの範囲内で動くことを特徴とする、請求項1〜9のいずれか1つに記載の積み降ろし方法。
【請求項11】
第2のユーザ選択画面が4分割画面を有し、各分割画面は、それぞれ1対の固定手段を表示しており、各1対の固定手段の一方は前記カメラシステムによって画像送信された前記荷台又は前記コンテナの固定手段であり、他方は前記コンテナ又は前記懸架装置そして前記コンテナないし前記懸架装置の固定手段のコンピュータで計算した輪郭を画像上で重ねた前記コンテナ又は前記懸架装置の対応する固定手段であることを特徴とする、請求項1〜10のいずれか1つに記載の積み降ろし方法。
【請求項12】
前記第2のユーザ選択画面が有するマーキング手段を使用し、前記荷台又は前記コンテナにおける少なくとも1つの目印をオペレータが選択して、積載されるコンテナの位置と前記荷台の位置との誤差、あるいは、前記懸架装置の位置と荷降ろしされるコンテナの位置との誤差を、微調整のために前記物流管理用DPシステムで計算することを特徴とする、請求項1〜11のいずれか1つに記載の積み降ろし方法。
【請求項13】
前記積載されるコンテナの位置と前記荷台の位置との誤差、あるいは、前記懸架装置の位置と前記荷降ろしされるコンテナの位置との誤差を微調整するためにコンピュータシステムが自動的に認識することを特徴とする、請求項1〜12のいずれか1つに記載の積み降ろし方法。
【請求項14】
前記積載されるコンテナの位置と前記荷台の位置、あるいは、前記懸架装置の位置と前記荷降ろしされるコンテナの位置に誤差があれば、前記コンテナの前記固定手段が前記荷台の前記固定手段の真上に、あるいは、前記懸架装置の前記固定手段が前記コンテナの前記固定手段の真上となるように前記懸架装置が回転することを特徴とする、請求項1〜13のいずれか1つに記載の積み降ろし方法。
【請求項15】
前記コンテナを前記懸架装置に乗せて荷台へと降ろす作業、あるいは前記スタッカクレーンの前記懸架装置を前記コンテナへ降ろす作業において、前記固定手段が互いに係合するまでオペレータによって操作されることを特徴とする、請求項1〜14のいずれか1つに記載の積み降ろし方法。
【請求項16】
請求項1または2および3〜15のいずれかに記載の方法を実行するため、積み替えするコンテナの位置を検知するために前記スタッカクレーンに取り付けられたカメラシステムと、前記スタッカクレーンの位置を検知するための絶対位置計算システムとを使って、コンテナヤードにおいてスタッカクレーンの位置を調整する方法であって、
前記カメラは校正カメラであり、
a)前記スタッカクレーンがコンテナヤード内の任意の位置に備えた参照点の上を移動し、前記カメラシステムのうち少なくとも1台のカメラが前記参照点を検知するステップと、
b)物流管理用DPシステムが前記参照点の位置と、記憶された参照点の位置とを比較して、誤差が生じた場合にはその距離を計算するステップと、
を含むことを特徴とする、スタッカクレーンの位置を調整する方法。
【請求項17】
前記コンテナヤードは、前記スタッカクレーンの前記カメラによって検知される複数の参照点を有している、ことを特徴とする、請求項16に記載の方法。
【請求項18】
請求項1または2および3〜15のいずれかに記載の方法を実行するため、積み替えするコンテナの位置を検出するために前記スタッカクレーンに取り付けられたカメラと、前記スタッカクレーンの位置を検知するための絶対位置計算システムを使って、コンテナヤードに備えられたスタッカクレーンのカメラの位置を調整する方法であって、
前記コンテナヤードは超参照点を有しており、スタッカクレーンに前記超参照点を使ってこれに対して調整できる前記カメラが設けられていることを特徴とする、カメラの位置を調整する方法。
【請求項1】
規格コンテナ用のコンテナヤードにおいて、コンテナヤードのコンテナ用のスタッカクレーンを使用する積み降ろし方法であって、前記スタッカクレーンは物流管理用DPシステムによって操作可能であると共に、各前記コンテナの保管場所とコンテナヤード内で移動できる輸送車両の荷台との間を移動可能であり、前記スタッカクレーンは前記コンテナを前記荷台に降ろすための懸架装置を有しており、前記懸架装置は前記荷台に合わせて位置調整可能である場合において、
前記輸送車両への積載の際に、
a)前記輸送車両が認識されて発生したデータを前記物流管理用DPシステムに送信するステップと、
b)校正カメラを使用して、前記輸送車両の前記荷台上の目印を検出して、その座標を前記物流管理用DPシステムへ送信するステップと、
c)前記物流管理用DPシステムが前記目印の前記座標と、前記DPシステムに保存されているコンテナのデータとを比較して、前記輸送車両の前記荷台上にありこのコンテナに適合する固定手段と位置座標とを決定するステップと、
d)前記スタッカクレーンが積載するコンテナと共に、コンピュータ操作によって前記輸送車両の前記荷台の上方で、前記位置座標の真上に移動するステップと、
e)前記スタッカクレーンに備えられた校正カメラを使用して、前記荷台の固定を検知した後、必要に応じて前記コンテナを移動して前記コンテナの固定手段を前記荷台の前記位置座標にある固定手段の真上に配置するステップと、
f)前記コンテナを前記輸送車両の前記荷台の上に降ろして、下降作業の最後には前記コンテナの前記固定手段を前記荷台の関連配置した前記固定手段に係合させるステップと、
を含むことを特徴とする、積み降ろし方法。
【請求項2】
規格コンテナ用のコンテナヤードにおいて、コンテナヤードのコンテナ用のスタッカクレーンを使用する積み降ろし方法であって、前記スタッカクレーンは物流管理用DPシステムによって操作可能であると共に、各前記コンテナの保管場所とコンテナヤード内で移動できる輸送車両の荷台との間を移動可能であり、前記スタッカクレーンは前記コンテナを前記荷台からピックアップするための懸架装置を有しており、前記懸架装置は前記荷台に合わせて位置調整可能である場合において、
前記輸送車両からの荷降ろしの際に、
a)前記輸送車両と荷降ろしされるコンテナを認識し、それにより発生したデータを物流管理用DPシステムへ送信するステップと、
b)校正カメラを使用して、前記コンテナの目印を検知し、その座標を前記物流管理用DPシステムへ送信するステップと、
c)前記物流管理用DPシステムが、前記目印に基づき、前記コンテナの固定手段と位置座標を決定するステップと、
d)前記スタッカクレーンがコンピュータ操作によって前記コンテナ上の前記位置座標の真上に移動するステップと、
e)前記スタッカクレーンに備えられた校正カメラを使用して、前記コンテナの固定手段を検知した後、必要に応じて前記懸架装置を移動して、前記スタッカクレーンの前記懸架装置の固定手段を前記コンテナの前記位置座標にある前記固定手段の真上に配置させるステップと、
f)前記懸架装置を前記コンテナに近づけて、前記懸架装置の前記固定手段を前記コンテナの前記固定手段に係合させるステップと、
を含むことを特徴とする、積み降ろし方法。
【請求項3】
前記輸送車輛又は荷降ろしされる前記コンテナの輸送車両がカメラシステムによって認識されることを特徴とする、請求項1又は2に記載の積み降ろし方法。
【請求項4】
前記荷台の前記目印又は前記コンテナの前記目印の前記座標を決定するために、オペレータは前記物流管理用DPシステムのモニタのユーザ選択画面において、前記荷台の前記目印又は前記コンテナの前記目印をマーキング手段で選択することを特徴とする、請求項1〜3のいずれか1つに記載の積み降ろし方法。
【請求項5】
前記荷台の前記目印又は前記コンテナの前記目印の前記座標がコンピュータシステムによって自動的に検出され前記物流管理システムに送信されることを特徴とする、請求項1〜4のいずれか1つに記載の積み降ろし方法。
【請求項6】
前記輸送車両の前記荷台の前記座標の検出及び前記コンテナの座標の検出を積み降ろし区域で行うことを特徴とする、請求項1〜5のいずれか1つに記載の積み降ろし方法。
【請求項7】
位置座標を、荷台の竪方向位置により、そして荷台目印の対角線交点により示し、それがコンテナの絶対目標位置を示し、ないしコンテナ目印上端の竪方向位置により又はコンテナ目印の対角線交点により示し、それが懸架装置の絶対目標位置を示すことを特徴とする、請求項1〜5のいずれか1つに記載の積み降ろし方法。
【請求項8】
前記輸送車両の前記荷台の座標又は前記コンテナの座標の検出を認識区域で行うことを特徴とする、請求項1〜7のいずれか1つに記載の積み降ろし方法。
【請求項9】
前記荷台の高さ及び前記荷台の前記目印を結ぶ前記対角線の前記交点、あるいは、前記コンテナにおける前記目印の前記上端の高さ及び前記コンテナの前記目印を結ぶ前記対角線の前記交点は、コンテナの相対目標位置であることを特徴とする、請求項1〜8のいずれか1つに記載の積み降ろし方法。
【請求項10】
前記位置座標は前記コンテナ又は前記懸架装置の絶対目標位置となり、カメラによって検出された駐車位置における輸送車両の座標と、前記コンテナ又は前記懸架装置の相対目標位置とによって決定されることを特徴とする、請求項1〜9のいずれか1つに記載の積み降ろし方法。
【請求項11】
前記スタッカクレーンは、前記コンテナまたは前記懸架装置の前記固定手段を結ぶ前記対角線の前記交点が、前記荷台または前記懸架装置の前記固定手段を結ぶ前記対角線の前記交点の真上なるように、前記荷台又は前記コンテナの範囲内で動くことを特徴とする、請求項1〜10のいずれか1つに記載の積み降ろし方法。
【請求項12】
第2のユーザ選択画面が4分割画面を有し、各分割画面は、それぞれ1対の固定手段を表示しており、各1対の固定手段の一方は前記カメラシステムによって画像送信された前記荷台又は前記コンテナの固定手段であり、他方は前記コンテナ又は前記懸架装置そして前記コンテナないし前記懸架装置の固定手段のコンピュータで計算した輪郭を画像上で重ねた前記コンテナ又は前記懸架装置の対応する固定手段であることを特徴とする、請求項1〜11のいずれか1つに記載の積み降ろし方法。
【請求項13】
前記第2のユーザ選択画面が有するマーキング手段を使用し、前記荷台又は前記コンテナにおける少なくとも1つの目印をオペレータが選択して、積載されるコンテナの位置と前記荷台の位置との誤差、あるいは、前記懸架装置の位置と荷降ろしされるコンテナの位置との誤差を、微調整のために前記物流管理用DPシステムで計算することを特徴とする、請求項1〜12のいずれか1つに記載の積み降ろし方法。
【請求項14】
前記積載されるコンテナの位置と前記荷台の位置との誤差、あるいは、前記懸架装置の位置と前記荷降ろしされるコンテナの位置との誤差を微調整するためにコンピュータシステムが自動的に認識することを特徴とする、請求項1〜13のいずれか1つに記載の積み降ろし方法。
【請求項15】
前記積載されるコンテナの位置と前記荷台の位置、あるいは、前記懸架装置の位置と前記荷降ろしされるコンテナの位置に誤差があれば、前記コンテナの前記固定手段が前記荷台の前記固定手段の真上に、あるいは、前記懸架装置の前記固定手段が前記コンテナの前記固定手段の真上となるように前記懸架装置が回転することを特徴とする、請求項1〜14のいずれか1つに記載の積み降ろし方法。
【請求項16】
前記コンテナを前記懸架装置に乗せて荷台へと降ろす作業、あるいは前記スタッカクレーンの前記懸架装置を前記コンテナへ降ろす作業において、前記固定手段が互いに係合するまでオペレータによって操作されることを特徴とする、請求項1〜15のいずれか1つに記載の積み降ろし方法。
【請求項17】
請求項1または2および3〜16のいずれかまたは幾つかに記載の方法を実行するため、積み替えするコンテナの位置を検知するために前記スタッカクレーンに取り付けられたカメラシステムと、前記スタッカクレーンの位置を検知するための絶対位置計算システムとを使って、コンテナヤードにおいてスタッカクレーンの位置を調整する方法であって、
前記カメラは校正カメラであり、
a)前記スタッカクレーンがコンテナヤード内の任意の位置に備えた参照点の上を移動し、前記カメラシステムのうち少なくとも1台のカメラが前記参照点を検知するステップと、
b)物流管理用DPシステムが前記参照点の位置と、記憶された参照点の位置とを比較して、誤差が生じた場合にはその距離を計算するステップと、
を含むことを特徴とする、スタッカクレーンの位置を調整する方法。
【請求項18】
前記コンテナヤードは、前記スタッカクレーンの前記カメラによって検知される複数の参照点を有している、ことを特徴とする、請求項17に記載の方法。
【請求項19】
請求項1または2および3〜16のいずれかまたは幾つかに記載の方法を実行するため、積み替えするコンテナの位置を検出するために前記スタッカクレーンに取り付けられたカメラと、前記スタッカクレーンの位置を検知するための絶対位置計算システムを使って、コンテナヤードに備えられたスタッカクレーンのカメラの位置を調整する方法であって、
前記コンテナヤードは超参照点を有しており、スタッカクレーンに前記超参照点を使ってこれに対して調整できる前記カメラが設けられていることを特徴とする、カメラの位置を調整する方法。
【特許請求の範囲】
【請求項1】
規格コンテナ用のコンテナヤードにおいて、コンテナヤードのコンテナ用のスタッカクレーンを使用する積み降ろし方法であって、前記スタッカクレーンは物流管理用DPシステムによって操作可能であると共に、各前記コンテナの保管場所とコンテナヤード内で移動できる輸送車両の荷台との間を移動可能であり、前記スタッカクレーンは前記コンテナを前記荷台に降ろすための懸架装置を有しており、前記懸架装置は前記荷台に合わせて位置調整可能である場合において、
前記輸送車両への積載の際に、
a)前記輸送車両が認識されて発生したデータを前記物流管理用DPシステムに送信するステップと、
b)校正カメラを使用して、前記輸送車両の前記荷台上の目印を検出して、その座標を前記物流管理用DPシステムへ送信するステップと、
c)前記物流管理用DPシステムが前記目印の前記座標と、前記DPシステムに保存されているコンテナのデータとを比較して、前記輸送車両の前記荷台上にありこのコンテナに適合する固定手段と位置座標とを決定するステップと、
d)前記スタッカクレーンが積載するコンテナと共に、コンピュータ操作によって前記輸送車両の前記荷台の上方で、前記位置座標の真上に移動するステップと、
e)前記スタッカクレーンに備えられた校正カメラを使用して、前記荷台の固定を検知した後、必要に応じて前記コンテナを移動して前記コンテナの固定手段を前記荷台の前記位置座標にある固定手段の真上に配置するステップと、
f)前記コンテナを前記輸送車両の前記荷台の上に降ろして、下降作業の最後には前記コンテナの前記固定手段を前記荷台の関連配置した前記固定手段に係合させるステップと、
を含むことを特徴とする、積み降ろし方法。
【請求項2】
規格コンテナ用のコンテナヤードにおいて、コンテナヤードのコンテナ用のスタッカクレーンを使用する積み降ろし方法であって、前記スタッカクレーンは物流管理用DPシステムによって操作可能であると共に、各前記コンテナの保管場所とコンテナヤード内で移動できる輸送車両の荷台との間を移動可能であり、前記スタッカクレーンは前記コンテナを前記荷台からピックアップするための懸架装置を有しており、前記懸架装置は前記荷台に合わせて位置調整可能である場合において、
前記輸送車両からの荷降ろしの際に、
a)前記輸送車両と荷降ろしされるコンテナを認識し、それにより発生したデータを物流管理用DPシステムへ送信するステップと、
b)校正カメラを使用して、前記コンテナの目印を検知し、その座標を前記物流管理用DPシステムへ送信するステップと、
c)前記物流管理用DPシステムが、前記目印に基づき、前記コンテナの固定手段と位置座標を決定するステップと、
d)前記スタッカクレーンがコンピュータ操作によって前記コンテナ上の前記位置座標の真上に移動するステップと、
e)前記スタッカクレーンに備えられた校正カメラを使用して、前記コンテナの固定手段を検知した後、必要に応じて前記懸架装置を移動して、前記スタッカクレーンの前記懸架装置の固定手段を前記コンテナの前記位置座標にある前記固定手段の真上に配置させるステップと、
f)前記懸架装置を前記コンテナに近づけて、前記懸架装置の前記固定手段を前記コンテナの前記固定手段に係合させるステップと、
を含むことを特徴とする、積み降ろし方法。
【請求項3】
前記輸送車輛又は荷降ろしされる前記コンテナの輸送車両がカメラシステムによって認識されることを特徴とする、請求項1又は2に記載の積み降ろし方法。
【請求項4】
前記荷台の前記目印又は前記コンテナの前記目印の前記座標を決定するために、オペレータは前記物流管理用DPシステムのモニタのユーザ選択画面において、前記荷台の前記目印又は前記コンテナの前記目印をマーキング手段で選択することを特徴とする、請求項1〜3のいずれか1つに記載の積み降ろし方法。
【請求項5】
前記荷台の前記目印又は前記コンテナの前記目印の前記座標がコンピュータシステムによって自動的に検出され前記物流管理システムに送信されることを特徴とする、請求項1〜4のいずれか1つに記載の積み降ろし方法。
【請求項6】
前記輸送車両の前記荷台の前記座標の検出及び前記コンテナの座標の検出を積み降ろし区域で行うことを特徴とする、請求項1〜5のいずれか1つに記載の積み降ろし方法。
【請求項7】
前記輸送車両の前記荷台の座標又は前記コンテナの座標の検出を認識区域で行うことを特徴とする、請求項1〜6のいずれか1つに記載の積み降ろし方法。
【請求項8】
前記荷台の高さ及び前記荷台の前記目印を結ぶ前記対角線の前記交点、あるいは、前記コンテナにおける前記目印の前記上端の高さ及び前記コンテナの前記目印を結ぶ前記対角線の前記交点は、コンテナの相対目標位置であることを特徴とする、請求項1〜7のいずれか1つに記載の積み降ろし方法。
【請求項9】
前記位置座標は前記コンテナ又は前記懸架装置の絶対目標位置となり、カメラによって検出された駐車位置における輸送車両の座標と、前記コンテナ又は前記懸架装置の相対目標位置とによって決定されることを特徴とする、請求項1〜8のいずれか1つに記載の積み降ろし方法。
【請求項10】
前記スタッカクレーンは、前記コンテナまたは前記懸架装置の前記固定手段を結ぶ前記対角線の前記交点が、前記荷台または前記懸架装置の前記固定手段を結ぶ前記対角線の前記交点の真上なるように、前記荷台又は前記コンテナの範囲内で動くことを特徴とする、請求項1〜9のいずれか1つに記載の積み降ろし方法。
【請求項11】
第2のユーザ選択画面が4分割画面を有し、各分割画面は、それぞれ1対の固定手段を表示しており、各1対の固定手段の一方は前記カメラシステムによって画像送信された前記荷台又は前記コンテナの固定手段であり、他方は前記コンテナ又は前記懸架装置そして前記コンテナないし前記懸架装置の固定手段のコンピュータで計算した輪郭を画像上で重ねた前記コンテナ又は前記懸架装置の対応する固定手段であることを特徴とする、請求項1〜10のいずれか1つに記載の積み降ろし方法。
【請求項12】
前記第2のユーザ選択画面が有するマーキング手段を使用し、前記荷台又は前記コンテナにおける少なくとも1つの目印をオペレータが選択して、積載されるコンテナの位置と前記荷台の位置との誤差、あるいは、前記懸架装置の位置と荷降ろしされるコンテナの位置との誤差を、微調整のために前記物流管理用DPシステムで計算することを特徴とする、請求項1〜11のいずれか1つに記載の積み降ろし方法。
【請求項13】
前記積載されるコンテナの位置と前記荷台の位置との誤差、あるいは、前記懸架装置の位置と前記荷降ろしされるコンテナの位置との誤差を微調整するためにコンピュータシステムが自動的に認識することを特徴とする、請求項1〜12のいずれか1つに記載の積み降ろし方法。
【請求項14】
前記積載されるコンテナの位置と前記荷台の位置、あるいは、前記懸架装置の位置と前記荷降ろしされるコンテナの位置に誤差があれば、前記コンテナの前記固定手段が前記荷台の前記固定手段の真上に、あるいは、前記懸架装置の前記固定手段が前記コンテナの前記固定手段の真上となるように前記懸架装置が回転することを特徴とする、請求項1〜13のいずれか1つに記載の積み降ろし方法。
【請求項15】
前記コンテナを前記懸架装置に乗せて荷台へと降ろす作業、あるいは前記スタッカクレーンの前記懸架装置を前記コンテナへ降ろす作業において、前記固定手段が互いに係合するまでオペレータによって操作されることを特徴とする、請求項1〜14のいずれか1つに記載の積み降ろし方法。
【請求項16】
請求項1または2および3〜15のいずれかに記載の方法を実行するため、積み替えするコンテナの位置を検知するために前記スタッカクレーンに取り付けられたカメラシステムと、前記スタッカクレーンの位置を検知するための絶対位置計算システムとを使って、コンテナヤードにおいてスタッカクレーンの位置を調整する方法であって、
前記カメラは校正カメラであり、
a)前記スタッカクレーンがコンテナヤード内の任意の位置に備えた参照点の上を移動し、前記カメラシステムのうち少なくとも1台のカメラが前記参照点を検知するステップと、
b)物流管理用DPシステムが前記参照点の位置と、記憶された参照点の位置とを比較して、誤差が生じた場合にはその距離を計算するステップと、
を含むことを特徴とする、スタッカクレーンの位置を調整する方法。
【請求項17】
前記コンテナヤードは、前記スタッカクレーンの前記カメラによって検知される複数の参照点を有している、ことを特徴とする、請求項16に記載の方法。
【請求項18】
請求項1または2および3〜15のいずれかに記載の方法を実行するため、積み替えするコンテナの位置を検出するために前記スタッカクレーンに取り付けられたカメラと、前記スタッカクレーンの位置を検知するための絶対位置計算システムを使って、コンテナヤードに備えられたスタッカクレーンのカメラの位置を調整する方法であって、
前記コンテナヤードは超参照点を有しており、スタッカクレーンに前記超参照点を使ってこれに対して調整できる前記カメラが設けられていることを特徴とする、カメラの位置を調整する方法。
【図1】

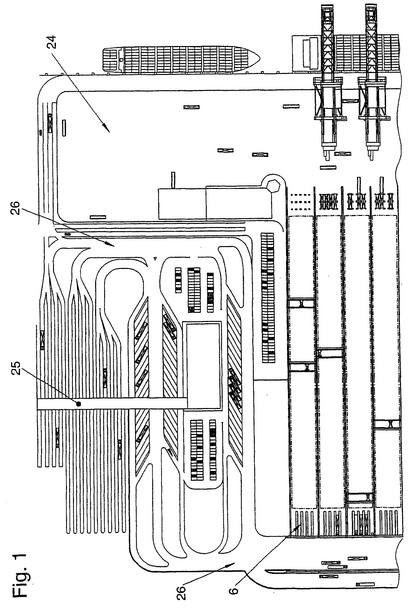
【図2】
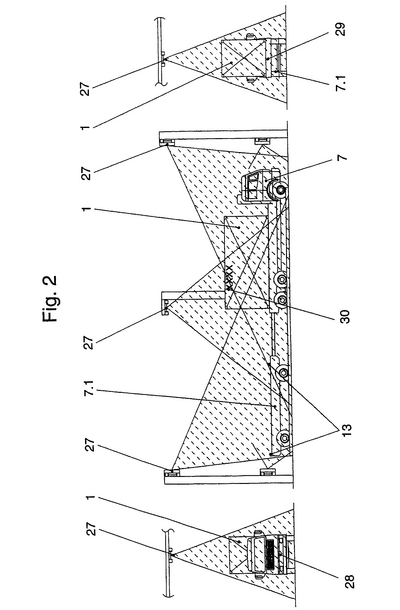
【図3】
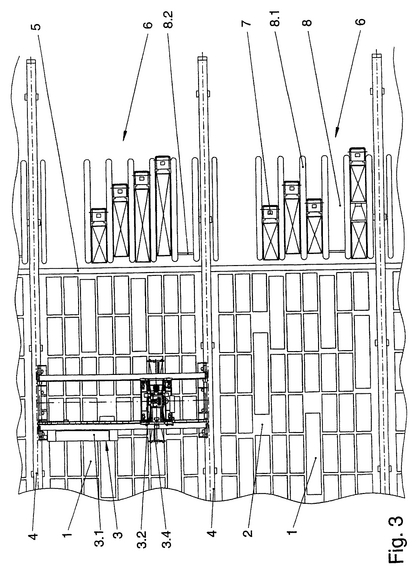
【図4】
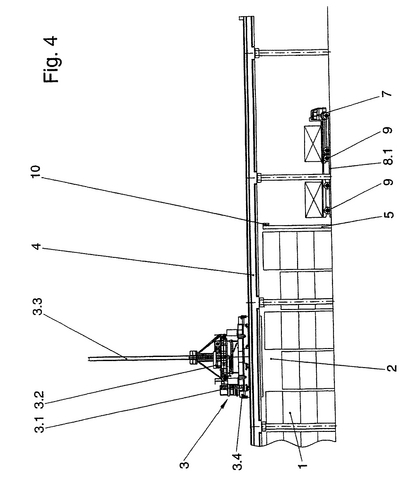
【図5】
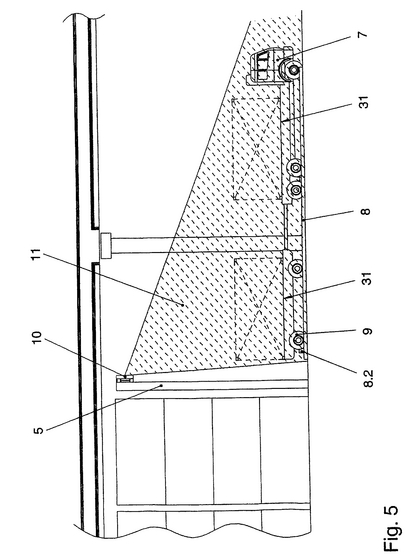
【図6】
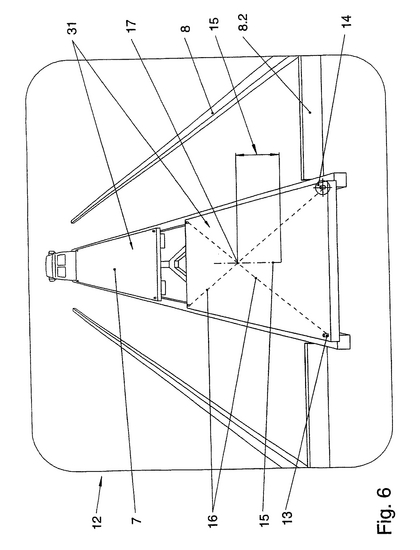
【図7】
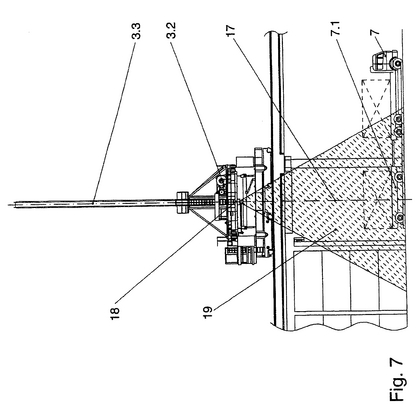
【図8】
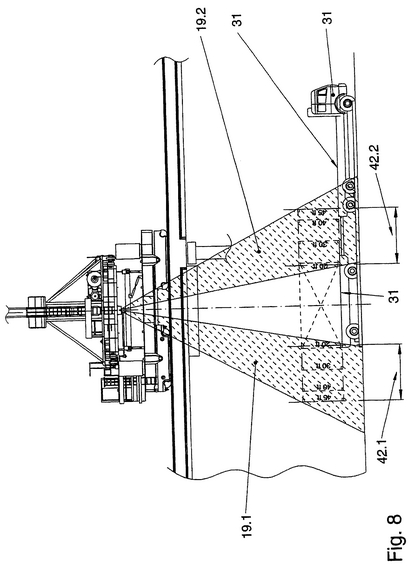
【図9】
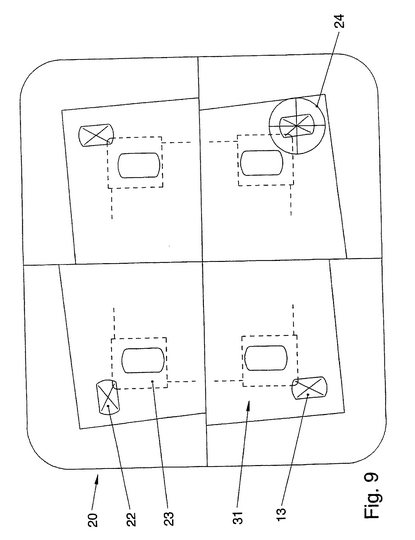
【図10】
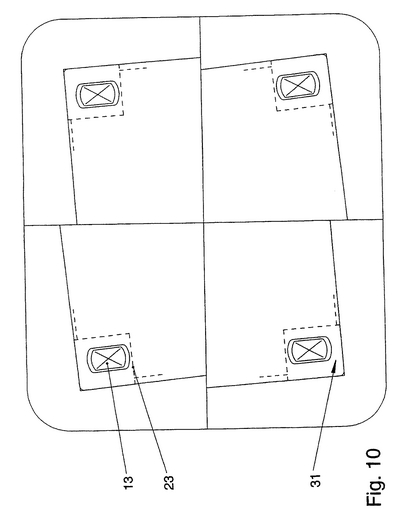
【図11】
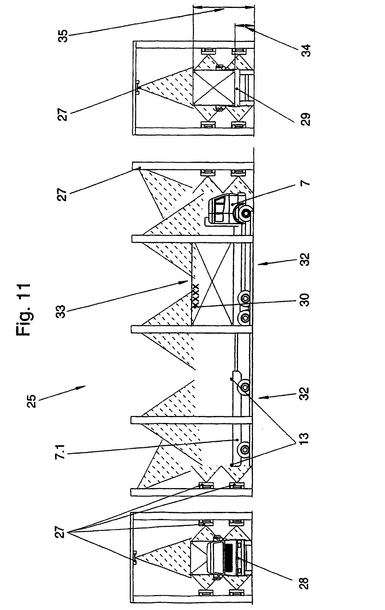
【図12】
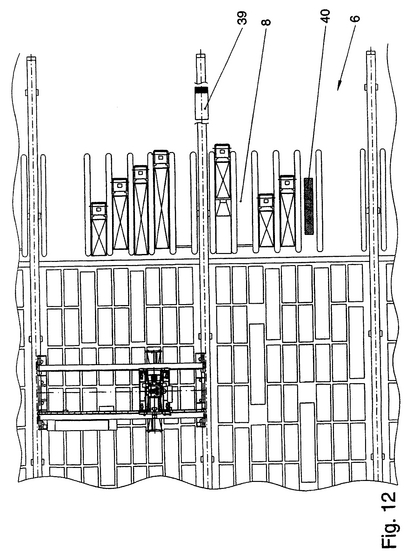
【図13】
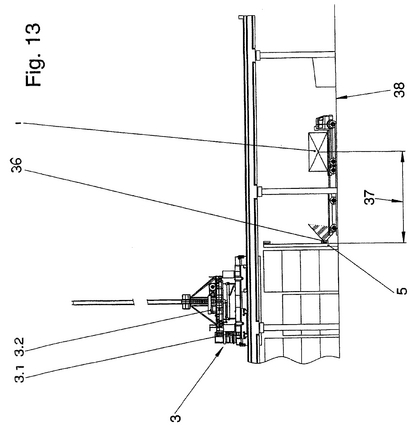
【図14】
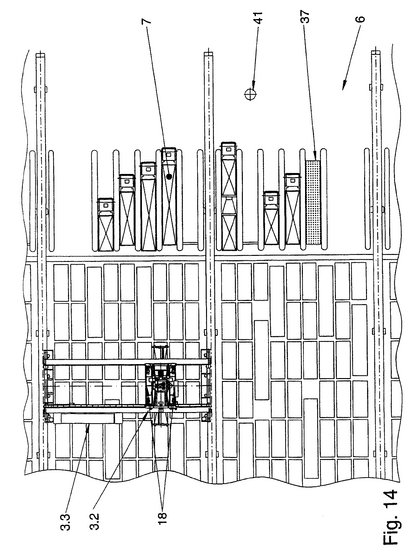
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公表番号】特表2006−504595(P2006−504595A)
【公表日】平成18年2月9日(2006.2.9)
【国際特許分類】
【出願番号】特願2003−576312(P2003−576312)
【出願日】平成15年3月13日(2003.3.13)
【国際出願番号】PCT/EP2003/002575
【国際公開番号】WO2003/078292
【国際公開日】平成15年9月25日(2003.9.25)
【出願人】(504346570)ゴットヴァルト ポート テクノロジー ゲーエムベーハー (14)
【氏名又は名称原語表記】GOTTWALD PORT TECHNOLOGY GMBH
【住所又は居所原語表記】Forststrasse 16,40597 Dusseldorf,Germany
【Fターム(参考)】
【公表日】平成18年2月9日(2006.2.9)
【国際特許分類】
【出願日】平成15年3月13日(2003.3.13)
【国際出願番号】PCT/EP2003/002575
【国際公開番号】WO2003/078292
【国際公開日】平成15年9月25日(2003.9.25)
【出願人】(504346570)ゴットヴァルト ポート テクノロジー ゲーエムベーハー (14)
【氏名又は名称原語表記】GOTTWALD PORT TECHNOLOGY GMBH
【住所又は居所原語表記】Forststrasse 16,40597 Dusseldorf,Germany
【Fターム(参考)】
[ Back to top ]