
車両トレーラに接続される牽引車を制御する方法及びシステム
【課題】トレーラを牽引する牽引車を制御するための、改善された方法及びシステムを提供する。
【解決手段】車両トレーラ102に接続されている牽引車100を制御する方法、及び当該方法を使用するシステム。本方法は、車両目標のセット及び当該車両目標のセットに応答する車両状態のセットを検知することを含む。本方法は、車両目標のセットと車両状態のセットとの間の複数の差を求めること、当該複数の差の傾向を求めること、当該傾向に基づいて対称信号及び非対称信号のうちの少なくとも一方を生成すること、並びに、当該対称信号及び非対称信号のうちの少なくとも一方を用いて車両システムを作動させることも含む。
【解決手段】車両トレーラ102に接続されている牽引車100を制御する方法、及び当該方法を使用するシステム。本方法は、車両目標のセット及び当該車両目標のセットに応答する車両状態のセットを検知することを含む。本方法は、車両目標のセットと車両状態のセットとの間の複数の差を求めること、当該複数の差の傾向を求めること、当該傾向に基づいて対称信号及び非対称信号のうちの少なくとも一方を生成すること、並びに、当該対称信号及び非対称信号のうちの少なくとも一方を用いて車両システムを作動させることも含む。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施の形態は、トレーラを牽引する自動車両を制御する方法及び装置に関する。
【背景技術】
【0002】
トレーラを牽引する車両にとって、特にその牽引車が高速で走行しているか又は方向転換しているとき、安定性は重要である。トレーラは牽引車の動特性に大きな影響を与えるため、多くの制御システムが、牽引車の安定性を向上させる技法を使用する。たとえば、アンチロックブレーキシステム(「ABS」)、トラクションコントロールシステム(「TCS」)、及び車両動特性制御(vehicle dynamics control:横滑り防止)(「VDC
」)システムのようなシステムを、車両が安定性を向上させるための様々な機能を実行するように構成することができる。
【0003】
トレーラの振動を抑制するか又は安定性を向上させるための既存の方法及びシステムは、通常、トレーラの振動が閾値よりも大きいときに、牽引車によって、牽引車を通じて、若しくは牽引車に対して対称ブレーキ又は対称トルクを加えること、続いて(ここでもまた牽引車によって、牽引車を通じて、若しくは牽引車に対して)非対称ブレーキ又は非対称トルクを加えることを必要とする。これらの制御方法及びシステムが不適切な時点で対称トルクを加えると、トレーラはさらに振動する場合がある。他方で、これらの制御方法及びシステムは、典型的には、トレーラが一定の状況下で振動すると、振動を抑制するために非対称トルクを伝達し始める。たとえば、幾つかの方法及びシステムは、トレーラの振動が振動数閾値に達した後、任意の対称トルク又は非対称トルクを伝達するために、或る時間待機する。換言すると、これらの制御方法及びシステムは、振動が閾値を下回って発生する限り、トレーラを振動したままにする。しかしながら、この時間中、特に牽引車が高速で走行しているときに、振動が激しくなると共に極度に損害を与えるものになる場合がある。
【発明の概要】
【発明が解決しようとする課題】
【0004】
したがって、トレーラを牽引する牽引車を制御するための、改善された方法及びシステムに対する需要が存在する。以下の概要は、そのような方法及びシステムの特定の実施の形態を説明する。しかしながら、以下の概要は、すべてのそのような実施の形態を説明するものではなく、複数の他の実施の形態があり得る。
【課題を解決するための手段】
【0005】
本発明の一形態によれば、通常、制御システムは最初に、操舵角、ヨーレート、車両速度、及び横加速度の信号のようなパラメータを使用して、実験に基づいて開発される。これらのパラメータは、通常、電子安定化プログラム(「ESP」)システムのような車両制御システム内で利用可能である。また、制御システムは、車両制御システムから継続的にパラメータ又は信号を受信し、それらの信号を制御システムモデルのパラメータと比較する。比較に基づいて、次に、振動を抑制するのに適切なタイプのブレーキが選択される。
【0006】
別の形態では、本発明は、車両トレーラに接続されている牽引車を制御する方法を提供する。本方法は、車両目標のセット及び当該車両目標のセットに応答する車両状態のセットを検知することを含む。本方法は、車両目標のセットと車両状態のセットとの間の複数の差を求めること、当該複数の差の傾向を求めること、当該傾向に基づいて対称信号及び
非対称信号のうちの少なくとも一方を生成すること、並びに、対称信号及び非対称信号のうちの少なくとも一方を用いて車両システムを作動させることも含む。
【0007】
別の形態では、本発明は、車両トレーラに接続されている牽引車を制御するシステムを提供する。本システムは、第1のセンサ及び第2のセンサと、比較器と、傾向モジュールと、コントローラと、車両システムとを備える。第1のセンサは、牽引車の車両目標のセットを検知し、一方で第2のセンサは、当該車両目標のセットに応答して牽引車が呈する動きを示す車両状態のセットを検知する。比較器は、車両目標のセットと車両状態のセットとの間の複数の差を求める。傾向モジュールは、当該複数の差の傾向を求め、一方でコントローラは、当該傾向に基づいて対称信号及び非対称信号のうちの少なくとも一方を生成する。車両システムは、対称信号及び非対称信号のうちの少なくとも一方に基づいて作動される。
【0008】
別の形態では、本発明は、車両トレーラに接続されている牽引車を制御する方法を提供する。本方法は、複数の動特性に基づいて牽引車のモデルを確定すること、牽引車の車両目標のセットを検知すること、及び当該車両目標のセットに応答して牽引車が呈する動きを示す車両状態のセットを検知することを含む。本方法は、車両目標のセット及び車両状態のセットに基づいてモデルを用いて切り換え信号を確定すること、並びに、当該切り換え信号に基づいて、対称ブレーキ及び非対称ブレーキのうちの少なくとも一方を選択的に加えることも含む。
【0009】
本発明の他の態様は、詳細な説明及び添付の図面を熟考することによって明らかになるであろう。
【図面の簡単な説明】
【0010】
【図1】トレーラを牽引する車両の概略平面図である。
【図2】図1の車両内に適用することができる振動制御システムのブロック図である。
【図3】図2の振動制御システム内に適用することができるバンドパスフィルタの振幅特性を示す図である。
【図4】図3のバンドパスフィルタの位相特性を示す図である。
【図5】図2の振動制御システム内に適用することができる非対称比例積分微分(「PID」)制御システムを示す図である。
【図6】図5の非対称PIDコントローラ内に適用することができる比例利得関数を示す図である。
【図7】図5の非対称PIDコントローラ内に適用することができる微分利得関数を示す図である。
【図8】図2の振動制御システム内に適用することができる対称PID制御システムを示す図である。
【図9】本発明の一実施形態による振動制御プロセスのフローチャートである。
【発明を実施するための形態】
【0011】
本発明の任意の実施形態を詳細に説明する前に、本発明は、その用途において、以下の説明において記載されるか又は以下の図面において示される、構成要素の構成及び配置の詳細に限定されないことは理解されたい。本発明は、他の実施形態が可能であり、様々な方法で実施又は実行することができる。
【0012】
同じく当業者に明らかであるはずであるが、図示されるシステムは、実際のシステムが類似し得るシステムのモデルである。説明されるモジュール及び論理構造のうちの多くは、マイクロプロセッサ又は同様の装置によって実行されるソフトウェア内に実装すること
ができるか、又はたとえば特定用途向け集積回路(「ASIC」)を含む様々な構成要素を使用するハードウェアにおいて実施することができる。「プロセッサ」のような用語はハードウェア及び/又はソフトウェアの両方を含むか又は指すことができる。さらに、本明細書の全体を通じて、大文字で始まる用語が使用される。そのような用語は一般的な慣習に合うように使用され、説明をコーディング例、式、及び/又は図面に相関させるのに役立つ。しかしながら、大文字の使用のみに起因して、いかなる特定の意味も暗示することもなければ、推測されるべきでもない。
【0013】
本発明の実施形態は、振動しているトレーラ又はセミトレーラに接続されている自動車両を制御する方法及びシステムに関する。一実施形態では、制御システムモデルが展開される。制御システムモデルは、受信した信号を、当該制御システムモデルのパラメータと比較する。次に、比較に基づいて、振動を抑制するための適切なタイプのブレーキ又はトルクが選択される。
【0014】
特定の実施形態では、牽引車の目標となる動きを示す車両状態の第1のセットを検知する。車両状態の第1のセットに応答して牽引車が呈する動きを示す、車両状態の第2のセットも検知する。次に、車両状態の第1のセット及び車両状態の第2のセットから、コントローラ信号を生成する。次に、コントローラ信号を使用して、対称ブレーキ及び非対称ブレーキのうちの少なくとも一方を選択的に加えて振動を抑制する。
【0015】
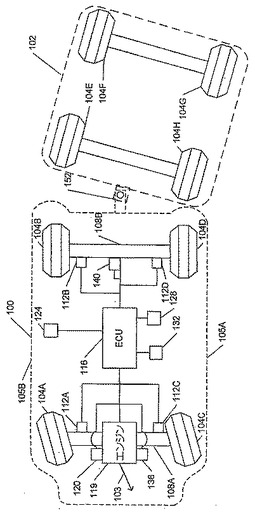
図1は、矢印103によって示される方向に走行する、トレーラ102を牽引する自動車両100の概略平面図を示している。牽引車100は、4つの車輪104A、104B、104C、及び104Dを有し、トレーラ102は、4つの車輪104E、104F、104G、及び104Hを有する。図1では、運転者(図示せず)は、車両100の左側105Aに座ると想定される。他の実施形態では、運転者は車両100の右側105Bに座ってもよい。車両100及びトレーラ102は、他の数の車輪を有してもよい。さらに、トレーラ102はセミトレーラ、フルサイズトレーラ、ボートトレーラ、キャンピングカー等であってもよい。車輪104A、104B、104C、及び104Dは2つの車軸108A及び108Bに接続される。車両100はエンジン119も備える。4つの車輪は複数の車輪速度センサ112A、112B、112C、及び112Dによって監視される。車輪速度センサ112A、112B、112C、及び112Dは電子処理ユニット(「ECU」)116と通信する。
【0016】
車両100は、操舵角センサ120、ヨーレートセンサ124、及び横加速度センサ128のような他のセンサも備える。車輪速度センサ112A、112B、112C、及び112D、操舵センサ120、ヨーレートセンサ124、並びに横加速度センサ128は、全般的に個別のセンサとして示される。これらのセンサ112A、112B、112C、112D、120、124、及び128は、たとえば、ECU116に結合することができる複数のセンサアレイ内の複数のセンサを含むこともできる。車体滑り角センサ132、及びエンジントルクセンサ136のような他のタイプのセンサも車両100において使用することができる。車両100は、トレーラ102に結合されているヒッチ152も備える。
【0017】
幾つかの実施形態では、センサ112A、112B、112C、112D、120、124、128、132、及び136は、自動車両100の全体にわたって埋め込まれているセンサアレイの複数の部分である。センサアレイは、車両100の特定の状態を検出及び監視する。たとえば、センサ112A、112B、112C、及び112Dは、牽引車100の速度を示す車両100の状態を検知するのに使用される。次に、検知された状態は車両100の速度を示す較正された信号に転換及び変換される。たとえば、センサ112A、112B、112C、及び112Dに較正回路又はプロセッサが装備されている場
合、速度を、センサ内で内部的に較正された形態に変換することができる。そうでない場合、状態は、当該技術分野において既知の態様で他の外部プロセスによって較正された信号に変換することができる。さらに、操舵センサ120、ヨーレートセンサ124、及び横加速度センサ128のような他のセンサを使用して、牽引車の左右の動き、左右の加速ような事象、及び動きの角度が検出又は検知される。センサ112A、112B、112C、112D、120、124、128のようなセンサによって出力される信号の値は、これ以降、まとめて検知された値又は値と呼ばれる。結果として、ECU116は内部又は外部の振動制御システムを支援するのに利用可能な既存のセンサからのデータを使用して、トレーラ102によって呈される振動を抑制することができる。
【0018】
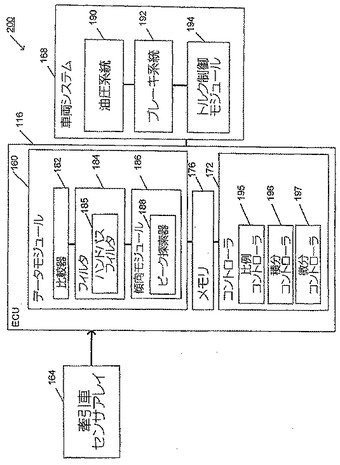
1つの例示的な振動制御システム200が図2に示される。図示する実施形態では、制御システム200は、ECU116内に埋め込まれているデータモジュール160を備え、センサ112A、112B、112C、112D、120、124、128、132、136等を含む牽引車センサアレイ164から値を受け取る。以下で詳述するように、ECU116は、車両システム168に結合されると共に、車両システム168と通信する。コントローラ又はプロセッサ172は、メモリ176内に記憶されているプログラムに従って、センサアレイ164からの値を処理する。
【0019】
データモジュール160がECU116内に示されるが、システム200は、データモジュール160のような様々な構成要素がECU116のような他の構成要素の外側又は遠隔に配置される分散アーキテクチャを用いて設計することができる。データモジュール160は、プロセッサ172のような他の構成要素内に組み込むか、又は車両100の他の制御システム内に組み込むこともできる。同様に、メモリ176はプロセッサ172の外側に示されるが、プロセッサ172の内部にあってもよい。
【0020】
プロセッサ172は、汎用マイクロコントローラ、汎用マイクロプロセッサ、専用マイクロプロセッサ又は専用マイクロコントローラ、信号プロセッサ、ASIC等とすることができる。幾つかの実施形態では、データモジュール160及び説明されるその機能は、ファームウェア、ソフトウェア、及びハードウェアの組合わせにおいて実施される。
【0021】
データモジュール160は、比較器モジュール182と、バンドパスフィルタ185を含むフィルタモジュール184と、ピーク探索器モジュール188を含む傾向モジュール186とを備える。言及したように、図示される実施形態では、ECU116は車両システム168と通信する。車両システム168は、油圧系統190と、ブレーキ系統192と、トルク制御モジュール194とを備える。上述したように、実施形態は、集中アーキテクチャが望まれるのか、若しくは分散アーキテクチャが望まれるのか、又は集中アーキテクチャ及び分散アーキテクチャの何らかの組み合わせが望まれるのかに応じて変更することができる。したがって、油圧系統190、ブレーキ系統192、及びトルク制御モジュール194のハードウェア構成要素及びソフトウェア構成要素は、ECU116内に埋め込んでもよい。油圧系統190、ブレーキ系統192、及びトルク制御モジュールは、油圧管路、ポンプ、液体タンク、ブレーキディスク及びブレーキパッド、エンジン、変速機、駆動軸、並びに駆動車軸のような、様々な機械的構成要素を備えることができることが明らかであろう。
【0022】
データモジュール160は、牽引車100の少なくとも1つの機械的モデル又はコントローラモデルを使用して、車両動特性に応じて対称トルク信号及び非対称トルク信号を同時に生成する。そのモデルは、トレーラ102が振動している間にセンサアレイ164において測定された複数の車両動特性又は複数のパラメータを用いて実験的に確定される。幾つかの実施形態では、車両動特性は、操舵角(δf)、横加速度(ay)、車輪速度(v)、前輪トルク(Τf)、後輪トルク(Τr)、車体滑り角(β)、及びヨーレート
【0023】
【数1】

【0024】
を含む。以下で詳述するように、実験的に生成されたモデルは複数の係数を用いて記述される。
【0025】
幾つかの実施形態では、モデルの係数はメモリ176内に記憶され、プロセッサ172によって処理される。図示される実施形態では、コントローラモデルは比例積分微分(「PID」)コントローラモデルに基づく。特に、プロセッサ172は、比例コントローラ195と、積分コントローラ196と、微分コントローラ197とを備える。しかしながら、比例コントローラモデル、比例微分(「PD」)コントローラモデル、及び比例積分(「PI」)コントローラモデルのような他のモデルも使用することができる。モデルが確定されると、データモジュール160は、確定されたモデルと、センサアレイ164から取得した値とを使用して、対称信号又は非対称信号を生成する。
【0026】
ECU116は、牽引車100の車両目標のセットを確定する。特に、運転者が特定の方向に、又は特定の速度で牽引車100を動かそうと試みるとき、運転者の入力が検知され、運転者の入力を示す信号がECU116に送信される。結果として、ECU116は運転者の入力を示す車両目標のセットを確定する。たとえば、運転者が牽引車100を、ハンドルを用いて特定の方向に操舵しようと試みるとき、ECU116は、運転手の入力する操舵角に対応する車両目標のセットを生成する。幾つかの実施形態では、車両目標のセットは、ヨーレートのセットを含む。結果として、車両状態のセットは、牽引車100によって実際に呈されるヨーレートのセットと、センサアレイ164によって検出される操舵角に対応するヨーレートのセットとを含む。
【0027】
牽引車100及びその周囲によって生成されるノイズは、センサアレイ164によって検出される車両状況に悪影響を及ぼす場合がある。結果として、ECU116は、通常、フィルタモジュール184を使用してノイズをフィルタリング除去して、フィルタリングされた車両状態のセットを取得する。次に、ECU116は比較器182を使用して、フィルタリングされた車両状態と車両目標との間の複数の差を取得する。牽引車100及びトレーラ102が偏揺れ又は振動しているときのように、車両状態がヨーレートであるとき、複数の差は、目標ヨーレートと呈されるヨーレートとの間のヨーレート誤差のセットを表す。
【0028】
言及したように、幾つかの実施形態では、フィルタモジュール184はまた、バンドパスフィルタ185を備える。一実施形態では、バンドパスフィルタ185は、式(1)に示すような一般的な伝達関数を有する。
【0029】
H(z)=B(z)/A(z)=(b0+b1z−1+b2z−2+.....+bnz−n)/(a0+a1z−1+a2z−2+.....+anz−n) (1)式中、nはフィルタの次数であり、ai及びbiは伝達関数のi番目の係数である。複数のフィルタリングされた差は、通常、トレーラ102が受けた振動を表す。特定の一実施形態では、バンドパスフィルタ185は、式(2)示すような伝達関数を有する二次(n=2)バターワースバンドパスフィルタのフィルタ特性を有する。
【0030】
H(z)=B(z)/A(z)=(b0+b1z−1+b2z−2)/(a0+a1z−1+a2z−2) (2)
バンドパスフィルタ185は、約0.375Hz〜約1.125Hzの通過帯域(又はカ
ットオフ振動数)、及び約25Hzのサンプリングレート(又は約0.04秒のサンプリング期間)のような他のフィルタ特性も有する。上述したようなサンプリングレートを有する通過帯域を達成するために、当該技術分野において既知の様態で係数を確定することができる。たとえば、Matlab(登録商標)ツールを使用して、以下の伝達関数係数、a0=1、a1=−1.8029、a2=0.8272、b0=0.08636、b1=0、及びb2=−0.08636が取得された。u(z)が複数の差又は複数のヨーレート誤差を表す場合、式(3)に示すように、y(z)によって表される複数のフィルタリングされた差、すなわちBPAusが求められる。
【0031】
y(z)=(b0−b1z−1+b2z−2)/(a0−a1z−1+a2z−2)×u(z) (3)他のフィルタ特性、チェビシェフフィルタのようなフィルタタイプ、ツール、及び係数も、利用する用途及び車両に応じて使用することができる。
【0032】
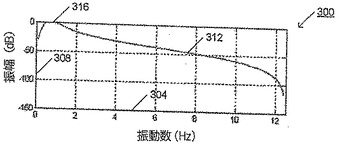
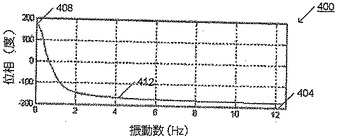
図3及び図4は、上述したようなフィルタ特性を有する二次バンドパスフィルタの振動数特性プロットを示している。特に、図3は振幅特性プロット300を示し、振動数値(Hz)がx軸304に沿って測定され、振幅値(dB)がy軸308に沿って測定される。特に、曲線312は二次バンドパスフィルタの振幅特性を表す。曲線312は、約0.375Hz〜約1.125Hzの範囲にわたる概ね平坦な通過帯域316も示している。同様に、図4は位相特性プロット400を示し、振動数値(Hz)がx軸404に沿って測定され、位相値(度)がy軸408に沿って測定される。曲線412は二次バンドパスフィルタの振動数特性を表す。曲線412は、通過帯域316内の本質的に線形の位相特性も有する。
【0033】
複数のフィルタリングされた差が正である場合、トレーラは車両100の右側105Bに向かって傾いているとみなされる。そのような場合、車輪104C及び104Dは外輪とみなされ、車輪104A及び104Bは内輪とみなされる。逆に、複数のフィルタリングされた差が負である場合、トレーラは車両100の左側105Aに向かって傾いているとみなされる。そのような場合、車輪104C及び104Dは内輪とみなされ、車輪104A及び104Bは外輪とみなされる。
【0034】
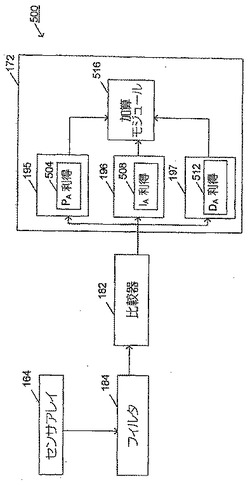
図5は、振動制御システム200内に適用することができる例示的な非対称比例積分微分(「PID」)制御システム500を示している。図5では、システム200の特定の部分しか示されない。それにもかかわらず、上記で言及したように、図5に示されないシステム200の部分はシステム200内で機能し続ける。
【0035】
言及したように、フィルタモジュール184は、車両状態と車両目標との間の複数の差をフィルタリングして、複数のフィルタリングされた差を取得する。牽引車100及びトレーラ102が偏揺れ又は振動しているときのように、車両状態がヨーレートであるとき、複数のフィルタリングされた差は、トレーラ102又はトレーラの振動が呈する振動周波数を表す。非対称制御システム500は、センサアレイ164からフィードバックされた値を使用して(適切な制御信号を生成することによって)トレーラの振動を低減しようと試みる。幾つかの実施形態では、非対称制御システム500は、トレーラの振動を低減又は最小化して、低減された振動を有するか、最小の振動を有するか、又は振動を全く有しない(ゼロ振動の)定常状態にしようと試みる。たとえば、非対称制御システム500は、最初に複数のフィルタリングされた差をゼロと比較して、システム200又は非対称制御システム500を駆動して定常状態にするための複数の制御偏差又は制御誤差を取得する。複数の制御誤差の値が所定の閾値を上回る(比較器182において比較される)とき、システム200は非対称ブレーキ又は抑制プロセスを開始する。特に、非対称制御システム500は、複数の制御誤差をプロセッサ172を通じて渡して、トレーラ102が
呈する振動の抑制を開始する。図示される実施形態では、プロセッサ172は、以下で詳述するように、比例コントローラ195内に比例利得関数を制御するためのPA利得モジュール504と、積分コントローラ196内に積分利得関数を制御するためのIA利得モジュール508と、微分コントローラ197内に微分利得関数を制御するためのDA利得モジュール512とを備える。特定の一実施形態では、IA利得は定数、たとえばゼロである。したがって、その特定の実施形態では、非対称制御システム500はPA利得関数及びDA利得関数しか適用しない。しかしながら、他の実施形態では、他の非ゼロIA利得関数、及び線形関数又は非線形関数も使用することができる。非対称制御システム500がPA利得関数及びDA利得関数を複数の制御誤差に適用した後、プロセッサ172によって複数の非対称制御信号が生成される。次に、非対称制御信号は、車両システム168に与えられる。たとえば、幾つかの実施形態では、制御信号はトルク制御モジュール194に提供される。次に、トルク制御モジュールは信号を生成して、油圧系統190内の複数の油圧ポンプ及び油圧バルブを作動させ、次にブレーキ系統192の複数のブレーキに圧力を加える。電動ブレーキ系統を装備した車両のような他の実施形態では、ブレーキを電気的に作動させることができると共に、油圧系統190の必要性を低減又は排除することができる。これらの例のいずれにおいても、トルク制御モジュール194が車輪104A、104B、104C、及び104Dのそれぞれのトルクの量を求め、関連する機械系統(たとえば、ブレーキ系統192、油圧系統190、又はその両方)を制御して、車輪104A、104B、104C、及び104Dのそれぞれにおいて求められたトルクを加える。
【0036】
幾つかの実施形態では、トレーラの振動方向の反転が発生する前に、非対称トルクが加えられるか又は伝達されて、抑制プロセスの効果を高めるか、ブレーキング中に発生する場合があるブレーキ待ち時間を排除するか、過度のブレーキを防止するか、又は過度の振動が生じるのを防止する。たとえば、非対称トルクは、トレーラの振動方向に応じて幾つかの成分にさらに分散することができる。特に、非対称制御システム500は、センサアレイ164からの車体滑り角のようなパラメータを使用して、非対称トルクを前輪トルク成分及び後輪トルク成分のような2つの成分に分散させて、過度のブレーキを防止する。このような場合、後輪104B及び104Dが呈する車体滑り角が所定の最大閾値に近づくと、トルク制御モジュール194は、後輪104B及び104Dに加えられる非対称後輪トルクを、非対称前輪トルクで補償する。
【0037】
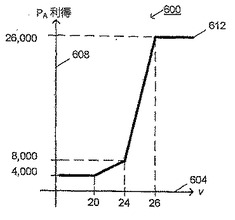
図6は、図5の非対称制御システム500内に適用することができる例示的な比例利得関数600を示している。車両速度値(m/s)がx軸604に沿って測定され、PA利得値(Nm/rad/s)がy軸608に沿って測定される。特に、曲線612は異なる車両速度におけるPA利得関数の値を表す。曲線612は通常、区分的線形比例利得を表すが、利用する用途及び車両に応じて区分的非線形又は概ね非線形とすることもできる。曲線612は、車両速度(v)が比較的低いとき、対応するPA利得値も低いことも示している。しかしながら、曲線612は、車両速度が所定の値より大きくなった後、PA利得値の変化率が比較的高いことも示している。図示される実施形態では、所定の値は24m/sである。さらに、車両100が最小速度に達する前、又は車両速度(v)が最大速度を超えた後、PA利得値は概ね一定である。たとえば、車両速度(v)が20m/sを下回る場合、PA利得値は約4,000Nm/rad/sである。車両速度(v)が例示的な最大閾値を超えると、PA利得値は約26,000Nm/rad/sから変化しない。換言すれば、幾つかの実施形態では、非対称制御システム500は通常、トレーラ102が呈する振動が所定の振動閾値を超えると、或る量の非対称ブレーキ又はトルクを加えるが、以下で詳述するように、加えられる非対称ブレーキの量は、最小にすることができ、様々な状況下で中断することができる。
【0038】
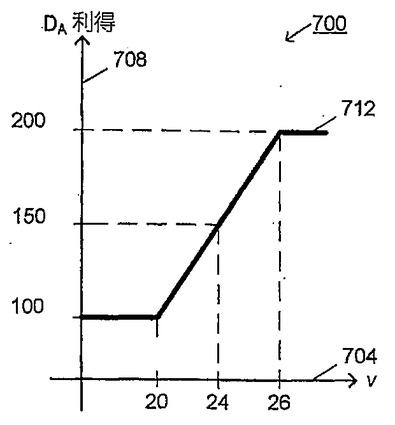
図7は、図5の非対称制御システム500内に適用することができる例示的な微分利得
関数700を示している。車両速度値(m/s)がx軸704に沿って測定され、DA利得値(Nm/rad/s2)がy軸708に沿って測定される。曲線712は異なる車両速度(v)におけるDA利得関数の値を表す。曲線712は通常、線形微分利得を表すが、利用する用途及び車両に応じて区分的非線形又は概ね非線形とすることもできる。したがって、曲線712は、微分利得が車両速度(v)に比例することも示している。たとえば、車両速度(v)が比較的低いとき、対応するDA利得値も低い。同様に、車両速度(v)が比較的高いとき、対応するDA利得値はそれに比例して高い。比例利得関数600と同様に、車両が最小速度に達する前、又は車両速度(v)が最大閾値を超えた後、DA利得値は概ね一定である。たとえば、車両速度(v)が20m/sを下回る場合、DA利得値は約100Nm/rad/s2である。車両速度(v)が例示的な最大閾値を超えると、DA利得値は約200Nm/rad/s2から変化しない。
【0039】
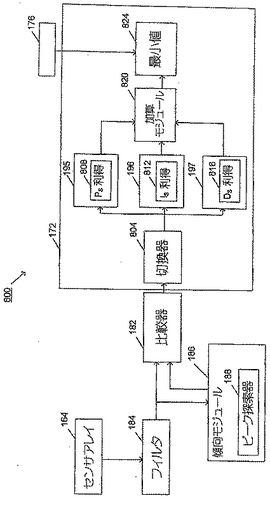
非対称ブレーキを加えることに加えて、システム200は、トレーラ102が振動するときに、対称トルクも加えて車両速度(v)を低減することができる。たとえば、システム200は、対称トルクを4つすべての車輪104A、104B、104C、及び104Dに加えて車両速度を低減することができる。対称トルクは、複数のフィルタリングされた差が或る所定の状態を概ね満たすときに生成されることができる。図8は、図2のシステム200内に適用して対称トルクを生成することができる対称PID制御システム800をブロック図のフォーマットで示す。図5と同様に、図8では、システム200の特定の部分しか示されない。それにもかかわらず、上記で言及したように、図8に示されないシステム200の部分はシステム200内で機能し続ける。
【0040】
車両状態とセンサアレイ164からの車両目標との間の複数のフィルタリングされた差は、フィルタ184によって取得又は生成される。ピーク探索器188は、フィルタリングされた差の最大値を求める。対称制御システム800は、比較器182において、複数のフィルタリングされた差を、当該フィルタリングされた差の最大値と比較する。比較器182において、複数のフィルタリングされた差が、当該フィルタリングされた差の最大値を下回る場合、トレーラ102は振動がより小さいとみなされる。次に、対称制御システム800は切換器804を作動させて、以下で詳述する対称ブレーキプロセスに入る。しかしながら、比較器182において、複数のフィルタリングされた差が、当該フィルタリングされた差の最大値を超える場合、トレーラ102は振動がより大きいとみなされる。結果として、対称制御システム800は切換器804を作動させて、上述した非対称ブレーキプロセスに入る。
【0041】
他の実施形態では、傾向モジュール186は、たとえば複数のフィルタリングされた差の変化率を求めることによって、複数のフィルタリングされた差の傾向を求める。変化率が負でない場合、振動は増加傾向を有するとみなされる。そのような場合、対称制御システム800は、切換器804を通じて非対称制御システム500と通信して、上述したようにトレーラ振動を安定化する有効なトルクを生成する非対称ブレーキプロセスを実行する。他方で、変化率が負である場合、振動は減少傾向を有するとみなされ、対称制御システム800は、切換器804を作動させて、以下のように車両100を減速させる対称ブレーキプロセスに入る。
【0042】
対称ブレーキプロセスでは、対称制御システム800は、複数の制御誤差をプロセッサ172を通じて渡して、トレーラ102が呈する振動の抑制を開始する。図示される実施形態では、プロセッサ172は、以下で詳述するように、比例コントローラ195内に対称比例利得関数を制御するためのPS利得モジュール808と、積分コントローラ196内に対称積分利得関数を制御するためのIS利得モジュール812と、微分コントローラ197内に対称微分利得関数を制御するためのDS利得モジュール816とを備える。特定の一実施形態では、IS利得及びDS利得は定数、たとえばゼロであり、PS利得は、
400ms2/rad/sのような非ゼロ定数である。すなわち、対称制御システム800は、定数のPS利得関数のみを複数の制御誤差に適用する。しかしながら、他の実施形態では、他の非ゼロPS利得関数、非ゼロIS利得関数、及び非ゼロDS利得関数、並びに線形関数又は非線形関数も使用することができる。
【0043】
対称制御システム800がPS利得関数を複数の制御誤差に適用した後、複数の対称制御信号が生成され、メモリ176から取り出された最小対称トルクと比較される。幾つかの実施形態では、最小対称トルクは約−0.5m/s2である。この方法で、対称制御システム800は、最小対称トルクを加えてブレーキ待ち時間を低減又は最小化すると共に、必要な場合、任意の非対称ブレーキを準備することができる。次に、継続的な対称トルク又はブレーキを分散させるか又は加えるために、対称制御信号が車両システム168に与えられて、油圧系統190及びトルク制御モジュール194、又はそれらの組合わせのような構成要素を作動させる。
【0044】
さらに、幾つかの実施形態では、複数のフィルタリングされた差が増大しているとき、又は振動が増加傾向を有するとき、幾つかの非対称ブレーキを調整して抑制効果を増大させるように、対称ブレーキ信号の部分が変更される。たとえば、対称制御システム800は、対称制御信号の値を減少させて、内輪104A及び104Bにおけるブレーキを低減することができる。対称制御システム800は、対称制御信号の値を減少させる一方で、システム200とも通信して、外輪104C及び104Dにおける非対称制御信号を増大させる。このように、システム200は反対のトルクを増大させるか又は最大化して車両100を安定化すると共に、トレーラ振動及び偏揺れモーメントを低減又は最小化することができる。
【0045】
複数のフィルタリングされた差が減少しているとき、又は振動が減少傾向を有するとき、幾つかの非対称ブレーキを調整して抑制効果を増大させるように、対称制御信号の部分も変更される。たとえば、対称制御システム800は、対称制御信号の値を増加させて、外輪104A及び104Bにおけるブレーキを増大させることができる。対称制御システム800は、対称制御信号の値を増加させる一方で、システム200とも通信して、内輪104C及び104Dにおける非対称制御信号を減少させる。このように、システム200は反対のトルクを増大させるか又は最大化して車両100を安定化すると共に、トレーラ振動及び偏揺れモーメントを低減又は最小化することもできる。
【0046】
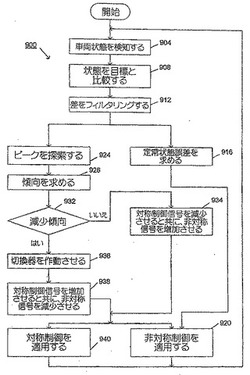
図9は、ソフトウェア、ファームウェア、又はハードウェアによって実行することができるプロセスを含む、幾つかの構成において発生する振動制御プロセス900のフローチャートである。言及したように、センサアレイ164は、ブロック904において、上述したようにヨーレートのような複数の車両状態を検知する。次に、システム200は、ブロック908において、複数の車両状態を複数の車両目標と比較して、複数の差を取得する。幾つかの実施形態では、複数の差は、目標ヨーレートと、車両100が呈するヨーレートとの間の複数のヨーレート誤差を表す。次にシステム200は、ブロック912において、複数の差をフィルタリングして、複数のフィルタリングされた差を取得する。システム200は、ブロック916において、上述したように定常状態誤差を求め続ける。定常状態誤差に基づいて、システム200は、ブロック920において、車両システム168(図2)に非対称制御を適用する。
【0047】
システム200は、ブロック924において、複数のフィルタリングされた差の最大値又はピークも求める。ピークに基づいて、システム200は、ブロック928において、複数のフィルタリングされた差の傾向を求める。ブロック932において求められた複数のフィルタリングされた差の傾向が増大傾向を示す場合、プロセッサ172は、ブロック934において、上述のように車輪104A、104B、104C、及び104Dに適用
される非対称制御信号及び対称制御信号を変更する。しかしながら、ブロック932において求められた複数のフィルタリングされた差の傾向が減少傾向を示す場合、プロセッサ172は、ブロック936において、対称ブレーキを作動させるように切り換わり、またブロック938において、上述のように車輪104A、104B、104C、及び104Dに適用される非対称制御信号及び対称制御信号を変更する。その後、上述のように、システム200は、ブロック940において対称制御システム800によって実行されるプロセスを、ブロック920において非対称制御システム500によって実行されるプロセスをそれぞれ適用する。
【0048】
以下の特許請求の範囲において、本発明の様々な特徴及び利点が記載される。
【技術分野】
【0001】
本発明の実施の形態は、トレーラを牽引する自動車両を制御する方法及び装置に関する。
【背景技術】
【0002】
トレーラを牽引する車両にとって、特にその牽引車が高速で走行しているか又は方向転換しているとき、安定性は重要である。トレーラは牽引車の動特性に大きな影響を与えるため、多くの制御システムが、牽引車の安定性を向上させる技法を使用する。たとえば、アンチロックブレーキシステム(「ABS」)、トラクションコントロールシステム(「TCS」)、及び車両動特性制御(vehicle dynamics control:横滑り防止)(「VDC
」)システムのようなシステムを、車両が安定性を向上させるための様々な機能を実行するように構成することができる。
【0003】
トレーラの振動を抑制するか又は安定性を向上させるための既存の方法及びシステムは、通常、トレーラの振動が閾値よりも大きいときに、牽引車によって、牽引車を通じて、若しくは牽引車に対して対称ブレーキ又は対称トルクを加えること、続いて(ここでもまた牽引車によって、牽引車を通じて、若しくは牽引車に対して)非対称ブレーキ又は非対称トルクを加えることを必要とする。これらの制御方法及びシステムが不適切な時点で対称トルクを加えると、トレーラはさらに振動する場合がある。他方で、これらの制御方法及びシステムは、典型的には、トレーラが一定の状況下で振動すると、振動を抑制するために非対称トルクを伝達し始める。たとえば、幾つかの方法及びシステムは、トレーラの振動が振動数閾値に達した後、任意の対称トルク又は非対称トルクを伝達するために、或る時間待機する。換言すると、これらの制御方法及びシステムは、振動が閾値を下回って発生する限り、トレーラを振動したままにする。しかしながら、この時間中、特に牽引車が高速で走行しているときに、振動が激しくなると共に極度に損害を与えるものになる場合がある。
【発明の概要】
【発明が解決しようとする課題】
【0004】
したがって、トレーラを牽引する牽引車を制御するための、改善された方法及びシステムに対する需要が存在する。以下の概要は、そのような方法及びシステムの特定の実施の形態を説明する。しかしながら、以下の概要は、すべてのそのような実施の形態を説明するものではなく、複数の他の実施の形態があり得る。
【課題を解決するための手段】
【0005】
本発明の一形態によれば、通常、制御システムは最初に、操舵角、ヨーレート、車両速度、及び横加速度の信号のようなパラメータを使用して、実験に基づいて開発される。これらのパラメータは、通常、電子安定化プログラム(「ESP」)システムのような車両制御システム内で利用可能である。また、制御システムは、車両制御システムから継続的にパラメータ又は信号を受信し、それらの信号を制御システムモデルのパラメータと比較する。比較に基づいて、次に、振動を抑制するのに適切なタイプのブレーキが選択される。
【0006】
別の形態では、本発明は、車両トレーラに接続されている牽引車を制御する方法を提供する。本方法は、車両目標のセット及び当該車両目標のセットに応答する車両状態のセットを検知することを含む。本方法は、車両目標のセットと車両状態のセットとの間の複数の差を求めること、当該複数の差の傾向を求めること、当該傾向に基づいて対称信号及び
非対称信号のうちの少なくとも一方を生成すること、並びに、対称信号及び非対称信号のうちの少なくとも一方を用いて車両システムを作動させることも含む。
【0007】
別の形態では、本発明は、車両トレーラに接続されている牽引車を制御するシステムを提供する。本システムは、第1のセンサ及び第2のセンサと、比較器と、傾向モジュールと、コントローラと、車両システムとを備える。第1のセンサは、牽引車の車両目標のセットを検知し、一方で第2のセンサは、当該車両目標のセットに応答して牽引車が呈する動きを示す車両状態のセットを検知する。比較器は、車両目標のセットと車両状態のセットとの間の複数の差を求める。傾向モジュールは、当該複数の差の傾向を求め、一方でコントローラは、当該傾向に基づいて対称信号及び非対称信号のうちの少なくとも一方を生成する。車両システムは、対称信号及び非対称信号のうちの少なくとも一方に基づいて作動される。
【0008】
別の形態では、本発明は、車両トレーラに接続されている牽引車を制御する方法を提供する。本方法は、複数の動特性に基づいて牽引車のモデルを確定すること、牽引車の車両目標のセットを検知すること、及び当該車両目標のセットに応答して牽引車が呈する動きを示す車両状態のセットを検知することを含む。本方法は、車両目標のセット及び車両状態のセットに基づいてモデルを用いて切り換え信号を確定すること、並びに、当該切り換え信号に基づいて、対称ブレーキ及び非対称ブレーキのうちの少なくとも一方を選択的に加えることも含む。
【0009】
本発明の他の態様は、詳細な説明及び添付の図面を熟考することによって明らかになるであろう。
【図面の簡単な説明】
【0010】
【図1】トレーラを牽引する車両の概略平面図である。
【図2】図1の車両内に適用することができる振動制御システムのブロック図である。
【図3】図2の振動制御システム内に適用することができるバンドパスフィルタの振幅特性を示す図である。
【図4】図3のバンドパスフィルタの位相特性を示す図である。
【図5】図2の振動制御システム内に適用することができる非対称比例積分微分(「PID」)制御システムを示す図である。
【図6】図5の非対称PIDコントローラ内に適用することができる比例利得関数を示す図である。
【図7】図5の非対称PIDコントローラ内に適用することができる微分利得関数を示す図である。
【図8】図2の振動制御システム内に適用することができる対称PID制御システムを示す図である。
【図9】本発明の一実施形態による振動制御プロセスのフローチャートである。
【発明を実施するための形態】
【0011】
本発明の任意の実施形態を詳細に説明する前に、本発明は、その用途において、以下の説明において記載されるか又は以下の図面において示される、構成要素の構成及び配置の詳細に限定されないことは理解されたい。本発明は、他の実施形態が可能であり、様々な方法で実施又は実行することができる。
【0012】
同じく当業者に明らかであるはずであるが、図示されるシステムは、実際のシステムが類似し得るシステムのモデルである。説明されるモジュール及び論理構造のうちの多くは、マイクロプロセッサ又は同様の装置によって実行されるソフトウェア内に実装すること
ができるか、又はたとえば特定用途向け集積回路(「ASIC」)を含む様々な構成要素を使用するハードウェアにおいて実施することができる。「プロセッサ」のような用語はハードウェア及び/又はソフトウェアの両方を含むか又は指すことができる。さらに、本明細書の全体を通じて、大文字で始まる用語が使用される。そのような用語は一般的な慣習に合うように使用され、説明をコーディング例、式、及び/又は図面に相関させるのに役立つ。しかしながら、大文字の使用のみに起因して、いかなる特定の意味も暗示することもなければ、推測されるべきでもない。
【0013】
本発明の実施形態は、振動しているトレーラ又はセミトレーラに接続されている自動車両を制御する方法及びシステムに関する。一実施形態では、制御システムモデルが展開される。制御システムモデルは、受信した信号を、当該制御システムモデルのパラメータと比較する。次に、比較に基づいて、振動を抑制するための適切なタイプのブレーキ又はトルクが選択される。
【0014】
特定の実施形態では、牽引車の目標となる動きを示す車両状態の第1のセットを検知する。車両状態の第1のセットに応答して牽引車が呈する動きを示す、車両状態の第2のセットも検知する。次に、車両状態の第1のセット及び車両状態の第2のセットから、コントローラ信号を生成する。次に、コントローラ信号を使用して、対称ブレーキ及び非対称ブレーキのうちの少なくとも一方を選択的に加えて振動を抑制する。
【0015】
図1は、矢印103によって示される方向に走行する、トレーラ102を牽引する自動車両100の概略平面図を示している。牽引車100は、4つの車輪104A、104B、104C、及び104Dを有し、トレーラ102は、4つの車輪104E、104F、104G、及び104Hを有する。図1では、運転者(図示せず)は、車両100の左側105Aに座ると想定される。他の実施形態では、運転者は車両100の右側105Bに座ってもよい。車両100及びトレーラ102は、他の数の車輪を有してもよい。さらに、トレーラ102はセミトレーラ、フルサイズトレーラ、ボートトレーラ、キャンピングカー等であってもよい。車輪104A、104B、104C、及び104Dは2つの車軸108A及び108Bに接続される。車両100はエンジン119も備える。4つの車輪は複数の車輪速度センサ112A、112B、112C、及び112Dによって監視される。車輪速度センサ112A、112B、112C、及び112Dは電子処理ユニット(「ECU」)116と通信する。
【0016】
車両100は、操舵角センサ120、ヨーレートセンサ124、及び横加速度センサ128のような他のセンサも備える。車輪速度センサ112A、112B、112C、及び112D、操舵センサ120、ヨーレートセンサ124、並びに横加速度センサ128は、全般的に個別のセンサとして示される。これらのセンサ112A、112B、112C、112D、120、124、及び128は、たとえば、ECU116に結合することができる複数のセンサアレイ内の複数のセンサを含むこともできる。車体滑り角センサ132、及びエンジントルクセンサ136のような他のタイプのセンサも車両100において使用することができる。車両100は、トレーラ102に結合されているヒッチ152も備える。
【0017】
幾つかの実施形態では、センサ112A、112B、112C、112D、120、124、128、132、及び136は、自動車両100の全体にわたって埋め込まれているセンサアレイの複数の部分である。センサアレイは、車両100の特定の状態を検出及び監視する。たとえば、センサ112A、112B、112C、及び112Dは、牽引車100の速度を示す車両100の状態を検知するのに使用される。次に、検知された状態は車両100の速度を示す較正された信号に転換及び変換される。たとえば、センサ112A、112B、112C、及び112Dに較正回路又はプロセッサが装備されている場
合、速度を、センサ内で内部的に較正された形態に変換することができる。そうでない場合、状態は、当該技術分野において既知の態様で他の外部プロセスによって較正された信号に変換することができる。さらに、操舵センサ120、ヨーレートセンサ124、及び横加速度センサ128のような他のセンサを使用して、牽引車の左右の動き、左右の加速ような事象、及び動きの角度が検出又は検知される。センサ112A、112B、112C、112D、120、124、128のようなセンサによって出力される信号の値は、これ以降、まとめて検知された値又は値と呼ばれる。結果として、ECU116は内部又は外部の振動制御システムを支援するのに利用可能な既存のセンサからのデータを使用して、トレーラ102によって呈される振動を抑制することができる。
【0018】
1つの例示的な振動制御システム200が図2に示される。図示する実施形態では、制御システム200は、ECU116内に埋め込まれているデータモジュール160を備え、センサ112A、112B、112C、112D、120、124、128、132、136等を含む牽引車センサアレイ164から値を受け取る。以下で詳述するように、ECU116は、車両システム168に結合されると共に、車両システム168と通信する。コントローラ又はプロセッサ172は、メモリ176内に記憶されているプログラムに従って、センサアレイ164からの値を処理する。
【0019】
データモジュール160がECU116内に示されるが、システム200は、データモジュール160のような様々な構成要素がECU116のような他の構成要素の外側又は遠隔に配置される分散アーキテクチャを用いて設計することができる。データモジュール160は、プロセッサ172のような他の構成要素内に組み込むか、又は車両100の他の制御システム内に組み込むこともできる。同様に、メモリ176はプロセッサ172の外側に示されるが、プロセッサ172の内部にあってもよい。
【0020】
プロセッサ172は、汎用マイクロコントローラ、汎用マイクロプロセッサ、専用マイクロプロセッサ又は専用マイクロコントローラ、信号プロセッサ、ASIC等とすることができる。幾つかの実施形態では、データモジュール160及び説明されるその機能は、ファームウェア、ソフトウェア、及びハードウェアの組合わせにおいて実施される。
【0021】
データモジュール160は、比較器モジュール182と、バンドパスフィルタ185を含むフィルタモジュール184と、ピーク探索器モジュール188を含む傾向モジュール186とを備える。言及したように、図示される実施形態では、ECU116は車両システム168と通信する。車両システム168は、油圧系統190と、ブレーキ系統192と、トルク制御モジュール194とを備える。上述したように、実施形態は、集中アーキテクチャが望まれるのか、若しくは分散アーキテクチャが望まれるのか、又は集中アーキテクチャ及び分散アーキテクチャの何らかの組み合わせが望まれるのかに応じて変更することができる。したがって、油圧系統190、ブレーキ系統192、及びトルク制御モジュール194のハードウェア構成要素及びソフトウェア構成要素は、ECU116内に埋め込んでもよい。油圧系統190、ブレーキ系統192、及びトルク制御モジュールは、油圧管路、ポンプ、液体タンク、ブレーキディスク及びブレーキパッド、エンジン、変速機、駆動軸、並びに駆動車軸のような、様々な機械的構成要素を備えることができることが明らかであろう。
【0022】
データモジュール160は、牽引車100の少なくとも1つの機械的モデル又はコントローラモデルを使用して、車両動特性に応じて対称トルク信号及び非対称トルク信号を同時に生成する。そのモデルは、トレーラ102が振動している間にセンサアレイ164において測定された複数の車両動特性又は複数のパラメータを用いて実験的に確定される。幾つかの実施形態では、車両動特性は、操舵角(δf)、横加速度(ay)、車輪速度(v)、前輪トルク(Τf)、後輪トルク(Τr)、車体滑り角(β)、及びヨーレート
【0023】
【数1】
【0024】
を含む。以下で詳述するように、実験的に生成されたモデルは複数の係数を用いて記述される。
【0025】
幾つかの実施形態では、モデルの係数はメモリ176内に記憶され、プロセッサ172によって処理される。図示される実施形態では、コントローラモデルは比例積分微分(「PID」)コントローラモデルに基づく。特に、プロセッサ172は、比例コントローラ195と、積分コントローラ196と、微分コントローラ197とを備える。しかしながら、比例コントローラモデル、比例微分(「PD」)コントローラモデル、及び比例積分(「PI」)コントローラモデルのような他のモデルも使用することができる。モデルが確定されると、データモジュール160は、確定されたモデルと、センサアレイ164から取得した値とを使用して、対称信号又は非対称信号を生成する。
【0026】
ECU116は、牽引車100の車両目標のセットを確定する。特に、運転者が特定の方向に、又は特定の速度で牽引車100を動かそうと試みるとき、運転者の入力が検知され、運転者の入力を示す信号がECU116に送信される。結果として、ECU116は運転者の入力を示す車両目標のセットを確定する。たとえば、運転者が牽引車100を、ハンドルを用いて特定の方向に操舵しようと試みるとき、ECU116は、運転手の入力する操舵角に対応する車両目標のセットを生成する。幾つかの実施形態では、車両目標のセットは、ヨーレートのセットを含む。結果として、車両状態のセットは、牽引車100によって実際に呈されるヨーレートのセットと、センサアレイ164によって検出される操舵角に対応するヨーレートのセットとを含む。
【0027】
牽引車100及びその周囲によって生成されるノイズは、センサアレイ164によって検出される車両状況に悪影響を及ぼす場合がある。結果として、ECU116は、通常、フィルタモジュール184を使用してノイズをフィルタリング除去して、フィルタリングされた車両状態のセットを取得する。次に、ECU116は比較器182を使用して、フィルタリングされた車両状態と車両目標との間の複数の差を取得する。牽引車100及びトレーラ102が偏揺れ又は振動しているときのように、車両状態がヨーレートであるとき、複数の差は、目標ヨーレートと呈されるヨーレートとの間のヨーレート誤差のセットを表す。
【0028】
言及したように、幾つかの実施形態では、フィルタモジュール184はまた、バンドパスフィルタ185を備える。一実施形態では、バンドパスフィルタ185は、式(1)に示すような一般的な伝達関数を有する。
【0029】
H(z)=B(z)/A(z)=(b0+b1z−1+b2z−2+.....+bnz−n)/(a0+a1z−1+a2z−2+.....+anz−n) (1)式中、nはフィルタの次数であり、ai及びbiは伝達関数のi番目の係数である。複数のフィルタリングされた差は、通常、トレーラ102が受けた振動を表す。特定の一実施形態では、バンドパスフィルタ185は、式(2)示すような伝達関数を有する二次(n=2)バターワースバンドパスフィルタのフィルタ特性を有する。
【0030】
H(z)=B(z)/A(z)=(b0+b1z−1+b2z−2)/(a0+a1z−1+a2z−2) (2)
バンドパスフィルタ185は、約0.375Hz〜約1.125Hzの通過帯域(又はカ
ットオフ振動数)、及び約25Hzのサンプリングレート(又は約0.04秒のサンプリング期間)のような他のフィルタ特性も有する。上述したようなサンプリングレートを有する通過帯域を達成するために、当該技術分野において既知の様態で係数を確定することができる。たとえば、Matlab(登録商標)ツールを使用して、以下の伝達関数係数、a0=1、a1=−1.8029、a2=0.8272、b0=0.08636、b1=0、及びb2=−0.08636が取得された。u(z)が複数の差又は複数のヨーレート誤差を表す場合、式(3)に示すように、y(z)によって表される複数のフィルタリングされた差、すなわちBPAusが求められる。
【0031】
y(z)=(b0−b1z−1+b2z−2)/(a0−a1z−1+a2z−2)×u(z) (3)他のフィルタ特性、チェビシェフフィルタのようなフィルタタイプ、ツール、及び係数も、利用する用途及び車両に応じて使用することができる。
【0032】
図3及び図4は、上述したようなフィルタ特性を有する二次バンドパスフィルタの振動数特性プロットを示している。特に、図3は振幅特性プロット300を示し、振動数値(Hz)がx軸304に沿って測定され、振幅値(dB)がy軸308に沿って測定される。特に、曲線312は二次バンドパスフィルタの振幅特性を表す。曲線312は、約0.375Hz〜約1.125Hzの範囲にわたる概ね平坦な通過帯域316も示している。同様に、図4は位相特性プロット400を示し、振動数値(Hz)がx軸404に沿って測定され、位相値(度)がy軸408に沿って測定される。曲線412は二次バンドパスフィルタの振動数特性を表す。曲線412は、通過帯域316内の本質的に線形の位相特性も有する。
【0033】
複数のフィルタリングされた差が正である場合、トレーラは車両100の右側105Bに向かって傾いているとみなされる。そのような場合、車輪104C及び104Dは外輪とみなされ、車輪104A及び104Bは内輪とみなされる。逆に、複数のフィルタリングされた差が負である場合、トレーラは車両100の左側105Aに向かって傾いているとみなされる。そのような場合、車輪104C及び104Dは内輪とみなされ、車輪104A及び104Bは外輪とみなされる。
【0034】
図5は、振動制御システム200内に適用することができる例示的な非対称比例積分微分(「PID」)制御システム500を示している。図5では、システム200の特定の部分しか示されない。それにもかかわらず、上記で言及したように、図5に示されないシステム200の部分はシステム200内で機能し続ける。
【0035】
言及したように、フィルタモジュール184は、車両状態と車両目標との間の複数の差をフィルタリングして、複数のフィルタリングされた差を取得する。牽引車100及びトレーラ102が偏揺れ又は振動しているときのように、車両状態がヨーレートであるとき、複数のフィルタリングされた差は、トレーラ102又はトレーラの振動が呈する振動周波数を表す。非対称制御システム500は、センサアレイ164からフィードバックされた値を使用して(適切な制御信号を生成することによって)トレーラの振動を低減しようと試みる。幾つかの実施形態では、非対称制御システム500は、トレーラの振動を低減又は最小化して、低減された振動を有するか、最小の振動を有するか、又は振動を全く有しない(ゼロ振動の)定常状態にしようと試みる。たとえば、非対称制御システム500は、最初に複数のフィルタリングされた差をゼロと比較して、システム200又は非対称制御システム500を駆動して定常状態にするための複数の制御偏差又は制御誤差を取得する。複数の制御誤差の値が所定の閾値を上回る(比較器182において比較される)とき、システム200は非対称ブレーキ又は抑制プロセスを開始する。特に、非対称制御システム500は、複数の制御誤差をプロセッサ172を通じて渡して、トレーラ102が
呈する振動の抑制を開始する。図示される実施形態では、プロセッサ172は、以下で詳述するように、比例コントローラ195内に比例利得関数を制御するためのPA利得モジュール504と、積分コントローラ196内に積分利得関数を制御するためのIA利得モジュール508と、微分コントローラ197内に微分利得関数を制御するためのDA利得モジュール512とを備える。特定の一実施形態では、IA利得は定数、たとえばゼロである。したがって、その特定の実施形態では、非対称制御システム500はPA利得関数及びDA利得関数しか適用しない。しかしながら、他の実施形態では、他の非ゼロIA利得関数、及び線形関数又は非線形関数も使用することができる。非対称制御システム500がPA利得関数及びDA利得関数を複数の制御誤差に適用した後、プロセッサ172によって複数の非対称制御信号が生成される。次に、非対称制御信号は、車両システム168に与えられる。たとえば、幾つかの実施形態では、制御信号はトルク制御モジュール194に提供される。次に、トルク制御モジュールは信号を生成して、油圧系統190内の複数の油圧ポンプ及び油圧バルブを作動させ、次にブレーキ系統192の複数のブレーキに圧力を加える。電動ブレーキ系統を装備した車両のような他の実施形態では、ブレーキを電気的に作動させることができると共に、油圧系統190の必要性を低減又は排除することができる。これらの例のいずれにおいても、トルク制御モジュール194が車輪104A、104B、104C、及び104Dのそれぞれのトルクの量を求め、関連する機械系統(たとえば、ブレーキ系統192、油圧系統190、又はその両方)を制御して、車輪104A、104B、104C、及び104Dのそれぞれにおいて求められたトルクを加える。
【0036】
幾つかの実施形態では、トレーラの振動方向の反転が発生する前に、非対称トルクが加えられるか又は伝達されて、抑制プロセスの効果を高めるか、ブレーキング中に発生する場合があるブレーキ待ち時間を排除するか、過度のブレーキを防止するか、又は過度の振動が生じるのを防止する。たとえば、非対称トルクは、トレーラの振動方向に応じて幾つかの成分にさらに分散することができる。特に、非対称制御システム500は、センサアレイ164からの車体滑り角のようなパラメータを使用して、非対称トルクを前輪トルク成分及び後輪トルク成分のような2つの成分に分散させて、過度のブレーキを防止する。このような場合、後輪104B及び104Dが呈する車体滑り角が所定の最大閾値に近づくと、トルク制御モジュール194は、後輪104B及び104Dに加えられる非対称後輪トルクを、非対称前輪トルクで補償する。
【0037】
図6は、図5の非対称制御システム500内に適用することができる例示的な比例利得関数600を示している。車両速度値(m/s)がx軸604に沿って測定され、PA利得値(Nm/rad/s)がy軸608に沿って測定される。特に、曲線612は異なる車両速度におけるPA利得関数の値を表す。曲線612は通常、区分的線形比例利得を表すが、利用する用途及び車両に応じて区分的非線形又は概ね非線形とすることもできる。曲線612は、車両速度(v)が比較的低いとき、対応するPA利得値も低いことも示している。しかしながら、曲線612は、車両速度が所定の値より大きくなった後、PA利得値の変化率が比較的高いことも示している。図示される実施形態では、所定の値は24m/sである。さらに、車両100が最小速度に達する前、又は車両速度(v)が最大速度を超えた後、PA利得値は概ね一定である。たとえば、車両速度(v)が20m/sを下回る場合、PA利得値は約4,000Nm/rad/sである。車両速度(v)が例示的な最大閾値を超えると、PA利得値は約26,000Nm/rad/sから変化しない。換言すれば、幾つかの実施形態では、非対称制御システム500は通常、トレーラ102が呈する振動が所定の振動閾値を超えると、或る量の非対称ブレーキ又はトルクを加えるが、以下で詳述するように、加えられる非対称ブレーキの量は、最小にすることができ、様々な状況下で中断することができる。
【0038】
図7は、図5の非対称制御システム500内に適用することができる例示的な微分利得
関数700を示している。車両速度値(m/s)がx軸704に沿って測定され、DA利得値(Nm/rad/s2)がy軸708に沿って測定される。曲線712は異なる車両速度(v)におけるDA利得関数の値を表す。曲線712は通常、線形微分利得を表すが、利用する用途及び車両に応じて区分的非線形又は概ね非線形とすることもできる。したがって、曲線712は、微分利得が車両速度(v)に比例することも示している。たとえば、車両速度(v)が比較的低いとき、対応するDA利得値も低い。同様に、車両速度(v)が比較的高いとき、対応するDA利得値はそれに比例して高い。比例利得関数600と同様に、車両が最小速度に達する前、又は車両速度(v)が最大閾値を超えた後、DA利得値は概ね一定である。たとえば、車両速度(v)が20m/sを下回る場合、DA利得値は約100Nm/rad/s2である。車両速度(v)が例示的な最大閾値を超えると、DA利得値は約200Nm/rad/s2から変化しない。
【0039】
非対称ブレーキを加えることに加えて、システム200は、トレーラ102が振動するときに、対称トルクも加えて車両速度(v)を低減することができる。たとえば、システム200は、対称トルクを4つすべての車輪104A、104B、104C、及び104Dに加えて車両速度を低減することができる。対称トルクは、複数のフィルタリングされた差が或る所定の状態を概ね満たすときに生成されることができる。図8は、図2のシステム200内に適用して対称トルクを生成することができる対称PID制御システム800をブロック図のフォーマットで示す。図5と同様に、図8では、システム200の特定の部分しか示されない。それにもかかわらず、上記で言及したように、図8に示されないシステム200の部分はシステム200内で機能し続ける。
【0040】
車両状態とセンサアレイ164からの車両目標との間の複数のフィルタリングされた差は、フィルタ184によって取得又は生成される。ピーク探索器188は、フィルタリングされた差の最大値を求める。対称制御システム800は、比較器182において、複数のフィルタリングされた差を、当該フィルタリングされた差の最大値と比較する。比較器182において、複数のフィルタリングされた差が、当該フィルタリングされた差の最大値を下回る場合、トレーラ102は振動がより小さいとみなされる。次に、対称制御システム800は切換器804を作動させて、以下で詳述する対称ブレーキプロセスに入る。しかしながら、比較器182において、複数のフィルタリングされた差が、当該フィルタリングされた差の最大値を超える場合、トレーラ102は振動がより大きいとみなされる。結果として、対称制御システム800は切換器804を作動させて、上述した非対称ブレーキプロセスに入る。
【0041】
他の実施形態では、傾向モジュール186は、たとえば複数のフィルタリングされた差の変化率を求めることによって、複数のフィルタリングされた差の傾向を求める。変化率が負でない場合、振動は増加傾向を有するとみなされる。そのような場合、対称制御システム800は、切換器804を通じて非対称制御システム500と通信して、上述したようにトレーラ振動を安定化する有効なトルクを生成する非対称ブレーキプロセスを実行する。他方で、変化率が負である場合、振動は減少傾向を有するとみなされ、対称制御システム800は、切換器804を作動させて、以下のように車両100を減速させる対称ブレーキプロセスに入る。
【0042】
対称ブレーキプロセスでは、対称制御システム800は、複数の制御誤差をプロセッサ172を通じて渡して、トレーラ102が呈する振動の抑制を開始する。図示される実施形態では、プロセッサ172は、以下で詳述するように、比例コントローラ195内に対称比例利得関数を制御するためのPS利得モジュール808と、積分コントローラ196内に対称積分利得関数を制御するためのIS利得モジュール812と、微分コントローラ197内に対称微分利得関数を制御するためのDS利得モジュール816とを備える。特定の一実施形態では、IS利得及びDS利得は定数、たとえばゼロであり、PS利得は、
400ms2/rad/sのような非ゼロ定数である。すなわち、対称制御システム800は、定数のPS利得関数のみを複数の制御誤差に適用する。しかしながら、他の実施形態では、他の非ゼロPS利得関数、非ゼロIS利得関数、及び非ゼロDS利得関数、並びに線形関数又は非線形関数も使用することができる。
【0043】
対称制御システム800がPS利得関数を複数の制御誤差に適用した後、複数の対称制御信号が生成され、メモリ176から取り出された最小対称トルクと比較される。幾つかの実施形態では、最小対称トルクは約−0.5m/s2である。この方法で、対称制御システム800は、最小対称トルクを加えてブレーキ待ち時間を低減又は最小化すると共に、必要な場合、任意の非対称ブレーキを準備することができる。次に、継続的な対称トルク又はブレーキを分散させるか又は加えるために、対称制御信号が車両システム168に与えられて、油圧系統190及びトルク制御モジュール194、又はそれらの組合わせのような構成要素を作動させる。
【0044】
さらに、幾つかの実施形態では、複数のフィルタリングされた差が増大しているとき、又は振動が増加傾向を有するとき、幾つかの非対称ブレーキを調整して抑制効果を増大させるように、対称ブレーキ信号の部分が変更される。たとえば、対称制御システム800は、対称制御信号の値を減少させて、内輪104A及び104Bにおけるブレーキを低減することができる。対称制御システム800は、対称制御信号の値を減少させる一方で、システム200とも通信して、外輪104C及び104Dにおける非対称制御信号を増大させる。このように、システム200は反対のトルクを増大させるか又は最大化して車両100を安定化すると共に、トレーラ振動及び偏揺れモーメントを低減又は最小化することができる。
【0045】
複数のフィルタリングされた差が減少しているとき、又は振動が減少傾向を有するとき、幾つかの非対称ブレーキを調整して抑制効果を増大させるように、対称制御信号の部分も変更される。たとえば、対称制御システム800は、対称制御信号の値を増加させて、外輪104A及び104Bにおけるブレーキを増大させることができる。対称制御システム800は、対称制御信号の値を増加させる一方で、システム200とも通信して、内輪104C及び104Dにおける非対称制御信号を減少させる。このように、システム200は反対のトルクを増大させるか又は最大化して車両100を安定化すると共に、トレーラ振動及び偏揺れモーメントを低減又は最小化することもできる。
【0046】
図9は、ソフトウェア、ファームウェア、又はハードウェアによって実行することができるプロセスを含む、幾つかの構成において発生する振動制御プロセス900のフローチャートである。言及したように、センサアレイ164は、ブロック904において、上述したようにヨーレートのような複数の車両状態を検知する。次に、システム200は、ブロック908において、複数の車両状態を複数の車両目標と比較して、複数の差を取得する。幾つかの実施形態では、複数の差は、目標ヨーレートと、車両100が呈するヨーレートとの間の複数のヨーレート誤差を表す。次にシステム200は、ブロック912において、複数の差をフィルタリングして、複数のフィルタリングされた差を取得する。システム200は、ブロック916において、上述したように定常状態誤差を求め続ける。定常状態誤差に基づいて、システム200は、ブロック920において、車両システム168(図2)に非対称制御を適用する。
【0047】
システム200は、ブロック924において、複数のフィルタリングされた差の最大値又はピークも求める。ピークに基づいて、システム200は、ブロック928において、複数のフィルタリングされた差の傾向を求める。ブロック932において求められた複数のフィルタリングされた差の傾向が増大傾向を示す場合、プロセッサ172は、ブロック934において、上述のように車輪104A、104B、104C、及び104Dに適用
される非対称制御信号及び対称制御信号を変更する。しかしながら、ブロック932において求められた複数のフィルタリングされた差の傾向が減少傾向を示す場合、プロセッサ172は、ブロック936において、対称ブレーキを作動させるように切り換わり、またブロック938において、上述のように車輪104A、104B、104C、及び104Dに適用される非対称制御信号及び対称制御信号を変更する。その後、上述のように、システム200は、ブロック940において対称制御システム800によって実行されるプロセスを、ブロック920において非対称制御システム500によって実行されるプロセスをそれぞれ適用する。
【0048】
以下の特許請求の範囲において、本発明の様々な特徴及び利点が記載される。
【特許請求の範囲】
【請求項1】
車両トレーラに接続されている牽引車を制御する方法であって、
前記牽引車の車両目標のセットを決定することであって、前記車両目標のセットは、前記牽引車に配置される複数の車両センサのうちの異なる1つに各々が対応する複数の目標値を含む、決定すること、
前記車両目標のセットに応答して前記牽引車が呈する動きを示す車両状態のセットを検知することであって、前記車両状態のセットは、前記牽引車に配置される前記複数の車両センサのうちの異なる1つによって各々が検知される複数の状態値を含む、検知すること、
前記車両目標のセットと前記車両状態のセットとの間の複数の差を求めること、
前記複数の差の傾向を求めること、
前記傾向に基づいて、前記複数の差を低減するために対称な力と非対称な力との間で選択をすること、並びに
前記対称な力又は前記非対称な力を前記牽引車に加えるように車両システムを作動させること、
を含む、方法。
【請求項2】
前記複数の差の傾向を求めることは、
前記複数の差の変化率を求めること、
前記変化率が正の値を含むとき、前記傾向が増加であることを示すこと、及び
前記変化率が負の値を含むとき、前記傾向が減少であることを示すこと、
を含む、請求項1に記載の方法。
【請求項3】
前記複数の差の傾向を求めることは、
前記複数の差のピーク値を求めること、
前記複数の差のうちの1つが前記ピーク値を上回るとき、前記傾向が増加であることを示すこと、及び
前記複数の差のうちの1つが前記ピーク値を下回るとき、前記傾向が減少であることを示すこと、
を含む、請求項1に記載の方法。
【請求項4】
前記対称な力と非対称な力との間で選択をすることは、
前記傾向が差の増加を示しているとき、前記非対称な力を選択すること、及び
前記傾向が差の減少を示しているとき、前記対称な力を選択すること
を含む、請求項1に記載の方法。
【請求項5】
前記車両システムを作動させることは、前記選択された力に基づいて、対称ブレーキ及び非対称ブレーキのうちの少なくとも一方を加えることを含む、請求項1に記載の方法。
【請求項6】
前記方法は、前記複数の差をバンドパスフィルタリングすることをさらに含み、前記傾向を求めることは、前記複数のフィルタリングされた差の傾向を求めることを含む、請求項1に記載の方法。
【請求項7】
前記車両目標のセットは複数のヨーレートを含む、請求項1に記載の方法。
【請求項8】
前記車両状態のセットを検知することは、前記牽引車が呈する複数のヨーレートを求めることを含む、請求項1に記載の方法。
【請求項9】
前記車両システムを作動させることは、前記選択された力に基づいて、対称トルク及び非対称トルクのうちの少なくとも一方を生成することを含む、請求項1に記載の方法。
【請求項10】
車両トレーラに接続されている牽引車を制御するシステムであって、
前記牽引車の車両目標のセットを決定するように構成される第1の複数のセンサであって、前記車両目標のセットは、前記牽引車に配置される第2の複数の車両センサのうちの異なる1つに各々が対応する複数の目標値を含む、第1の複数のセンサと、
前記車両目標のセットに応答して前記牽引車が呈する動きを示す車両状態のセットを検知するように構成される前記第2の複数のセンサであって、前記車両状態のセットは、前記第2の複数の車両センサのうちの異なる1つによって各々が検知される複数の状態値を含む、第2の複数のセンサと、
前記車両目標のセットと前記車両状態のセットとの間の複数の差を求めるように構成される比較器と、
前記複数の差の傾向を求めるように構成される傾向モジュールと、
前記傾向に基づいて、前記複数の差を低減するために対称な力と非対称な力との間で選択をするように構成されるコントローラと、
前記対称な力又は前記非対称な力を前記牽引車に加えるように前記コントローラにより作動されるように構成される車両システムと、
を備える、システム。
【請求項11】
前記傾向は前記複数の差の変化率を含み、前記コントローラは、前記変化率が正の値を含むとき、前記傾向が増加であることを示し、前記変化率が負の値を含むとき、前記傾向が減少であることを示すようにさらに構成される、請求項10に記載のシステム。
【請求項12】
前記傾向モジュールは、前記複数の差のピーク値を求めるように構成されるピーク探索器を備え、前記コントローラは、前記複数の差のうちの1つが前記ピーク値を上回るとき、前記傾向が増加であることを示し、前記複数の差のうちの1つが前記ピーク値を下回るとき、前記傾向が減少であることを示すようにさらに構成される、請求項10に記載のシステム。
【請求項13】
前記コントローラは、前記傾向が差の増加を示しているとき、前記非対称な力を選択し、前記傾向が差の減少を示しているとき、前記対称な力を選択するようにさらに構成される、請求項10に記載のシステム。
【請求項14】
前記車両システムは油圧ブレーキ系統を備え、該油圧ブレーキ系統は、前記コントローラによる前記選択に基づいて、対称ブレーキ又は非対称ブレーキを加えるように構成される、請求項10に記載のシステム。
【請求項15】
前記システムは、前記複数の差をフィルタリングするように構成されるバンドパスフィルタをさらに備え、前記コントローラは、該複数のフィルタリングされた差に基づいて前記複数の差の前記傾向を求めるようにさらに構成される、請求項10に記載のシステム。
【請求項16】
前記車両目標のセットは複数のヨーレートを含む、請求項10に記載のシステム。
【請求項17】
前記車両状態のセットは、前記牽引車が呈する複数のヨーレートを含む、請求項10に記載のシステム。
【請求項18】
前記車両システムは油圧系統を備え、該油圧系統は、前記コントローラによる前記選択に基づいて、前記牽引車のための対称トルク又は非対称トルクを生成するように構成される、請求項10に記載のシステム。
【請求項1】
車両トレーラに接続されている牽引車を制御する方法であって、
前記牽引車の車両目標のセットを決定することであって、前記車両目標のセットは、前記牽引車に配置される複数の車両センサのうちの異なる1つに各々が対応する複数の目標値を含む、決定すること、
前記車両目標のセットに応答して前記牽引車が呈する動きを示す車両状態のセットを検知することであって、前記車両状態のセットは、前記牽引車に配置される前記複数の車両センサのうちの異なる1つによって各々が検知される複数の状態値を含む、検知すること、
前記車両目標のセットと前記車両状態のセットとの間の複数の差を求めること、
前記複数の差の傾向を求めること、
前記傾向に基づいて、前記複数の差を低減するために対称な力と非対称な力との間で選択をすること、並びに
前記対称な力又は前記非対称な力を前記牽引車に加えるように車両システムを作動させること、
を含む、方法。
【請求項2】
前記複数の差の傾向を求めることは、
前記複数の差の変化率を求めること、
前記変化率が正の値を含むとき、前記傾向が増加であることを示すこと、及び
前記変化率が負の値を含むとき、前記傾向が減少であることを示すこと、
を含む、請求項1に記載の方法。
【請求項3】
前記複数の差の傾向を求めることは、
前記複数の差のピーク値を求めること、
前記複数の差のうちの1つが前記ピーク値を上回るとき、前記傾向が増加であることを示すこと、及び
前記複数の差のうちの1つが前記ピーク値を下回るとき、前記傾向が減少であることを示すこと、
を含む、請求項1に記載の方法。
【請求項4】
前記対称な力と非対称な力との間で選択をすることは、
前記傾向が差の増加を示しているとき、前記非対称な力を選択すること、及び
前記傾向が差の減少を示しているとき、前記対称な力を選択すること
を含む、請求項1に記載の方法。
【請求項5】
前記車両システムを作動させることは、前記選択された力に基づいて、対称ブレーキ及び非対称ブレーキのうちの少なくとも一方を加えることを含む、請求項1に記載の方法。
【請求項6】
前記方法は、前記複数の差をバンドパスフィルタリングすることをさらに含み、前記傾向を求めることは、前記複数のフィルタリングされた差の傾向を求めることを含む、請求項1に記載の方法。
【請求項7】
前記車両目標のセットは複数のヨーレートを含む、請求項1に記載の方法。
【請求項8】
前記車両状態のセットを検知することは、前記牽引車が呈する複数のヨーレートを求めることを含む、請求項1に記載の方法。
【請求項9】
前記車両システムを作動させることは、前記選択された力に基づいて、対称トルク及び非対称トルクのうちの少なくとも一方を生成することを含む、請求項1に記載の方法。
【請求項10】
車両トレーラに接続されている牽引車を制御するシステムであって、
前記牽引車の車両目標のセットを決定するように構成される第1の複数のセンサであって、前記車両目標のセットは、前記牽引車に配置される第2の複数の車両センサのうちの異なる1つに各々が対応する複数の目標値を含む、第1の複数のセンサと、
前記車両目標のセットに応答して前記牽引車が呈する動きを示す車両状態のセットを検知するように構成される前記第2の複数のセンサであって、前記車両状態のセットは、前記第2の複数の車両センサのうちの異なる1つによって各々が検知される複数の状態値を含む、第2の複数のセンサと、
前記車両目標のセットと前記車両状態のセットとの間の複数の差を求めるように構成される比較器と、
前記複数の差の傾向を求めるように構成される傾向モジュールと、
前記傾向に基づいて、前記複数の差を低減するために対称な力と非対称な力との間で選択をするように構成されるコントローラと、
前記対称な力又は前記非対称な力を前記牽引車に加えるように前記コントローラにより作動されるように構成される車両システムと、
を備える、システム。
【請求項11】
前記傾向は前記複数の差の変化率を含み、前記コントローラは、前記変化率が正の値を含むとき、前記傾向が増加であることを示し、前記変化率が負の値を含むとき、前記傾向が減少であることを示すようにさらに構成される、請求項10に記載のシステム。
【請求項12】
前記傾向モジュールは、前記複数の差のピーク値を求めるように構成されるピーク探索器を備え、前記コントローラは、前記複数の差のうちの1つが前記ピーク値を上回るとき、前記傾向が増加であることを示し、前記複数の差のうちの1つが前記ピーク値を下回るとき、前記傾向が減少であることを示すようにさらに構成される、請求項10に記載のシステム。
【請求項13】
前記コントローラは、前記傾向が差の増加を示しているとき、前記非対称な力を選択し、前記傾向が差の減少を示しているとき、前記対称な力を選択するようにさらに構成される、請求項10に記載のシステム。
【請求項14】
前記車両システムは油圧ブレーキ系統を備え、該油圧ブレーキ系統は、前記コントローラによる前記選択に基づいて、対称ブレーキ又は非対称ブレーキを加えるように構成される、請求項10に記載のシステム。
【請求項15】
前記システムは、前記複数の差をフィルタリングするように構成されるバンドパスフィルタをさらに備え、前記コントローラは、該複数のフィルタリングされた差に基づいて前記複数の差の前記傾向を求めるようにさらに構成される、請求項10に記載のシステム。
【請求項16】
前記車両目標のセットは複数のヨーレートを含む、請求項10に記載のシステム。
【請求項17】
前記車両状態のセットは、前記牽引車が呈する複数のヨーレートを含む、請求項10に記載のシステム。
【請求項18】
前記車両システムは油圧系統を備え、該油圧系統は、前記コントローラによる前記選択に基づいて、前記牽引車のための対称トルク又は非対称トルクを生成するように構成される、請求項10に記載のシステム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2013−18487(P2013−18487A)
【公開日】平成25年1月31日(2013.1.31)
【国際特許分類】
【出願番号】特願2012−230530(P2012−230530)
【出願日】平成24年10月18日(2012.10.18)
【分割の表示】特願2009−524739(P2009−524739)の分割
【原出願日】平成19年8月9日(2007.8.9)
【出願人】(591245473)ロベルト・ボッシュ・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツング (591)
【氏名又は名称原語表記】ROBERT BOSCH GMBH
【Fターム(参考)】
【公開日】平成25年1月31日(2013.1.31)
【国際特許分類】
【出願日】平成24年10月18日(2012.10.18)
【分割の表示】特願2009−524739(P2009−524739)の分割
【原出願日】平成19年8月9日(2007.8.9)
【出願人】(591245473)ロベルト・ボッシュ・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツング (591)
【氏名又は名称原語表記】ROBERT BOSCH GMBH
【Fターム(参考)】
[ Back to top ]