
車両ドライバの特定装置及び車両ドライバの特定方法
【課題】車両ドライバの特定にかかる利便性の高い運転操作の学習を通じての車両ドライバの特定をより高精度に行うことのできる車両ドライバの特定装置及び車両ドライバの特定方法を提供する。
【解決手段】車両100には、ドライバによる運転操作の特徴量を示すデータが当該運転操作の行われた走行環境の別に登録されるデータベース150が設けられている。車載制御装置140を構成する前方車両識別部142は、車両100の進行方向前方を走行する前方車両を識別する。ドライバ特定処理部144は、前方車両識別部142の識別結果、ドライバによる運転操作の特徴量、及びデータベース150に登録されたデータを用いて車両100のドライバを特定する処理を行う。
【解決手段】車両100には、ドライバによる運転操作の特徴量を示すデータが当該運転操作の行われた走行環境の別に登録されるデータベース150が設けられている。車載制御装置140を構成する前方車両識別部142は、車両100の進行方向前方を走行する前方車両を識別する。ドライバ特定処理部144は、前方車両識別部142の識別結果、ドライバによる運転操作の特徴量、及びデータベース150に登録されたデータを用いて車両100のドライバを特定する処理を行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両を運転操作するドライバの特定に利用して有益な車両ドライバの特定装置及び車両ドライバの特定方法に関する。
【背景技術】
【0002】
近年、車両のセキュリティーを高めるべく、車両のドライバを特定し、この特定結果に基づいて車両のドライバが正規ユーザであるか否かを認証するようにしたシステムなどが開発されている。また、この特定結果に基づき、ルームミラーやシートポジションの位置調整などを車両のドライバに合わせて自動的に行うシステムの開発も検討されている。
【0003】
一方、こうした車両ドライバの特定方法としては、IDキーやIDカードに付与されているID情報と車載機に予め登録されたID情報とを照合することにより、IDキーやIDカードの所有者、すなわち車両のドライバを特定する方法がある。すなわちこの方法では、認証用のIDキーやIDカードなどの物理的な認証用の媒体を正規のユーザに予め配布するとともに、それらIDキーやIDカードに付与されるID情報を車載機に予め登録することとなる。
【0004】
ところで、このようにIDキーやIDカードといった物理的な媒体を利用してドライバを特定する方法では、それらIDキーやIDカードが不正入手される可能性も否定できない。そして、それらIDキーやIDカードが不正入手されるようなことがあると、正規ユーザではないドライバが正規ユーザであるかのごとく誤って認証されてしまうなど、セキュリティーを担保することが難しくなる。さらに、このような物理的な媒体を用いてドライバを特定しようとすると、ドライバは、車両を利用する都度、いちいち同媒体を用いて認証を受ける必要があるなど、利便性を欠くものともなっている。
【0005】
そこで、例えば特許文献1に記載のシステムを含む従来のシステムでは、車載機の操作態様、車両の減速量、発進時の加速度、車線変更のタイミングなど、各ドライバによる運転操作の操作特性を示すデータをデータベースに登録するようにしている。そして、ドライバの特定に際しては、データベースに登録されたデータにて示される操作特性を導出するための車両制御をナビゲーション装置や車間距離制御装置を介して行い、この車両制御に応答して行われるドライバの運転操作の特性とデータベースに登録されているデータにて示される操作特性とが照合される。そしてその後、この照合結果をもとに、車両を運転しているドライバが特定される。これにより、IDキーやIDカードなどの物理的な媒体を用いずとも、また、ドライバを特定するための所定の操作をドライバに要求せずとも、ドライバを特定することができるようになる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2008−222167号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
ところで、道路上における車両の走行には、ドライバによる運転操作に影響を及ぼす様々な変動要素が存在する。また、こうした変動要素は、時間帯や走行地点によって動的に変化する。このため、たとえ同一のドライバであっても、例えば車載機の操作態様、車両の減速量、発進時の加速度、車線変更のタイミングなど、道路上を走行する車両のもとで行われる運転操作の内容や各種操作要素の操作量は、それら変動要素の存在に起因して大きく変化することとなる。すなわち、たとえ同一のドライバであっても、車載機の操作態様や車両の減速量などの操作特性が必ずしも一定の傾向になるとは限らない。
【0008】
こうしたことから、ドライバによる各種操作要素の操作特性のみに基づいてドライバを特定することは難しく、その特定精度を向上する上でなお改良の余地を残すものとなっている。
【0009】
本発明は、このような実情に鑑みてなされたものであり、その目的は、車両ドライバの特定にかかる利便性の高い運転操作の学習を通じての車両ドライバの特定をより高精度に行うことのできる車両ドライバの特定装置及び車両ドライバの特定方法を提供することにある。
【課題を解決するための手段】
【0010】
以下、上記課題を解決するための手段及びその作用効果について記載する。
請求項1に記載の発明は、車両を運転操作するドライバの運転操作態様に基づいてドライバの特定を行う車両ドライバの特定装置であって、ドライバによる運転操作の特徴量を示すデータが当該運転操作の行われた地点において動的に変動する走行環境の別に登録されるデータベースと、前記データベースに登録されたデータのうち、特定対象とするドライバの運転する車両と走行環境が共通もしくは類似するデータを用いてドライバを特定する処理を行うドライバ特定処理部と、を備えることを要旨とする。
【0011】
請求項7に記載の発明は、車両を運転操作するドライバの運転操作態様に基づいてドライバの特定を行う車両ドライバの特定方法であって、ドライバによる運転操作の特徴量を示すデータを当該運転操作の行われた地点において動的に変動する走行環境の別にデータベースに登録するステップと、前記データベースに登録したデータのうち、特定対象とするドライバの運転する車両と走行環境が共通もしくは類似するデータを用いてドライバを特定するステップと、を含むことを要旨とする。
【0012】
共通もしくは類似する走行環境下で行われる運転操作の特徴量は共通する傾向にあるものの、たとえ同一のドライバであっても走行環境が相違するときには運転操作の特徴量が相違する傾向にある。また、走行環境が共通もしくは類似したとしても、同走行環境下を運転するドライバが相違するときには、運転操作の特徴量は相違する傾向にある。さらに、各地点における走行環境とは、各地点の地域特性や各地点の利用状況に応じて動的に変動する。そして、運転操作の特徴量とは、このように動的に変動する走行環境に起因して、逐次変化することとなる。 そこで、上記構成あるいは方法によるように、ドライバによる運転操作の特徴量を示すデータを当該運転操作の行われた地点において動的に変動する走行環境の別にデータベースに登録する。そして、ドライバの特定に際しては、或る走行環境のもとで特定対象とするドライバにより行われた運転操作の特徴量と、この走行環境に共通もしくは類似する走行環境下で行われた運転操作の特徴量を示すデータとを用いて、ドライバを特定する。このため、特定対象とするドライバの運転する車両の走行環境が動的に変化したとしても、この走行環境に対応するデータを用いてドライバを特定することが可能となる。そのため、ドライバの運転操作の特徴量を変化させ得る走行環境が変化したとしても、その影響を受けることなく、ドライバを特定することが可能となる。これにより、運転操作の特徴量に基づくドライバの特定をより高精度に行うことが可能となる。
【0013】
請求項2に記載の発明は、請求項1に記載の車両ドライバの特定装置において、ドライバによる運転操作の特徴量を示すデータが登録される前記走行環境の別が、当該運転操作される車両の進行方向前方を走行する前方車両の有無であり、前記ドライバ特定処理部は、前記特定対象とするドライバの運転する車両と走行環境が共通もしくは類似するデータとして、当該車両の進行方向前方を走行する前方車両の有無の共通するデータを用いてドライバを特定する処理を行うことを要旨とする。
【0014】
請求項8に記載の発明は、請求項7に記載の車両ドライバの特定方法において、前記登録するステップにおいて、ドライバによる運転操作の特徴量を示すデータを、当該運転操作される車両の進行方向前方を走行する前方車両の有無の別に前記データベースに登録し、前記特定するステップにおいて、特定対象とするドライバの運転する車両と走行環境が共通もしくは類似するデータとして当該車両の進行方向前方を走行する前方車両の有無の共通するデータを用いて特定対象とするドライバを特定することを要旨とする。
【0015】
ドライバによる運転操作は、同ドライバが運転する車両の進行方向前方を走行する前方車両に追従する態様で行われる傾向にある。すなわち、前方車両が減速等を行ったときには、これに追従して同前方車両の進行方向後方を走行する車両のドライバは、前方車両との車間距離を維持すべく減速操作等を行う傾向にある。そして、このように前方車両の存在を加味して行われる運転操作の特徴量にもドライバ固有の癖が反映される結果、その特徴量がドライバ毎に相違することとなる。
【0016】
そこで、上記構成あるいは方法によるように、走行環境としての前方車両の有無を示すデータを運転操作の特徴量を示すデータとともにデータベースに登録する。そして、ドライバの特定に際しては、特定対象とするドライバが運転する車両に前方車両が識別される。この結果、前方車両が存在するときには、前方車両が存在する状況下で取得されたデータベースに登録済みのデータを用いてドライバの特定が行われる。一方、前方車両が存在しないときには、前方車両が存在しない状況下で取得されたデータベースに登録済みのデータを用いてドライバの特定が行われる。このように上記構成あるいは方法によれば、運転操作に影響を及ぼす前方車両の有無に応じてドライバの特定に用いるデータを使い分けることにより、前方車両の存在如何に拘わらずドライバを高精度に特定することが可能となる。
【0017】
請求項3に記載の発明は、請求項1または2に記載の車両ドライバの特定装置において、前記データベースには、前記走行環境の別に登録されるドライバによる運転操作の特徴量を示すデータがドライバによる運転操作の行われた地点毎に登録されるものであり、前記ドライバ特定処理部は、前記データベースに登録されたデータのうち、運転操作の行われた地点及び走行環境が共に共通もしくは類似するデータを用いて特定対象とするドライバを特定する処理を行うことを要旨とする。
【0018】
請求項9に記載の発明は、請求項8に記載の車両ドライバの特定方法において、前記登録するステップにおいて、走行環境の別に登録されるドライバによる運転操作の特徴量を示すデータをドライバによる運転操作の行われた地点毎に登録し、前記特定するステップにおいて、前記データベースに登録したデータのうち、運転操作の行われた地点及び走行環境が共に共通もしくは類似するデータを用いて特定対象とするドライバを特定することを要旨とする。
【0019】
車両の走行する各地点では、その地点に応じた運転操作が行われる傾向にあり、こうした運転操作にはドライバに固有の癖等が反映される傾向にある。そして、同一のドライバが或る地点のもとで行う運転操作の特徴量は共通もしくは類似する傾向にあり、地点毎に行われる運転操作にはドライバ固有の癖が特に反映されるものとなっている。すなわち、地点毎に行われる運転操作の特徴量は、同一のドライバのものは共通もしくは類似する一方、異なるドライバ間では相違する蓋然性が高い。こうしたことから、走行環境が共通し、さらに走行地点が共通する状況下で同一のドライバにより行われる車両操作は極めて再現性が高く、運転操作の特徴量が共通する傾向にある。
【0020】
そこで、上記構成あるいは方法によるように、各地点で行われる運転操作の特徴量を走行環境毎にデータベースに登録する。そして、ドライバの特定に際しては、地点及び走行環境が共に共通もしくは類似する状況下で取得されたデータを用いる。このため、車両の操作環境が極めて近似する状況下で行われた運転操作の特徴量に基づいてドライバを特定することが可能となる。
【0021】
請求項4に記載の発明は、請求項3に記載の車両ドライバの特定装置において、前記地点とは、道路線形、道路勾配、及び交差点形状の少なくとも1つが共通もしくは類似する地点であることを要旨とする。
【0022】
請求項10に記載の発明は、請求項9に記載の車両ドライバの特定方法において、前記地点として、道路線形、道路勾配、及び交差点形状の少なくとも1つが共通もしくは類似する地点を選定することを要旨とする。
【0023】
道路線形、道路勾配、交差点形状といった要素のもとで行われる運転操作とは、こうした要素毎に固有のものであり、またドライバに固有の癖も反映され易い。また、このように道路線形、道路勾配、及び交差点形状といった要素は、道路上に多く存在し、エリアが異なったとしても類似する傾向にある。
【0024】
そこで、上記構成あるいは方法によるように、道路線形、道路勾配、交差点形状といった各要素のもとで行われた運転操作の特徴量を示すデータをデータベースに登録する。そして、ドライバの特定に際しては、例えば、ドライバが運転操作を行った地点と共通する地点で行われた運転操作の特徴量を示すデータがデータベースに存在するときには、このデータを用いてドライバの特定が行われる。これにより、地点が共通し、かつ走行環境が共通もしくは類似する状況下で行われた運転操作の特徴量に基づいてドライバを高精度に特定することが可能となる。
【0025】
一方、ドライバが運転操作を行った地点と共通する地点で行われた運転操作の特徴量を示すデータがデータベースに存在しなくても、ドライバが運転操作を行った地点と類似する地点で行われた運転操作の特徴量を示すデータがデータベースに存在するときには、このデータを用いてドライバを特定することが可能となる。これにより、走行環境と併せて地点を加味したドライバの特定を行いつつも、類似する地点で取得されたデータさえデータベースに存在すれば、ドライバの特定を行うことが可能となる。
【0026】
請求項5に記載の発明は、請求項3または4に記載の車両ドライバの特定装置において、前記運転操作の特徴量が、特定の交通要素のもとで行われる複数種の運転操作要素の操作態様であり、前記地点が、特定の交通要素のもとで行われる複数種の運転操作要素による一連の運転操作が行われる連続した地点であることを要旨とする。
【0027】
請求項11に記載の発明は、請求項9または10に記載の車両ドライバの特定方法において、前記運転操作の特徴量が、特定の交通要素のもとで行われる複数種の運転操作要素の操作態様であり、前記地点として、特定の交通要素のもとで行われる複数種の運転操作要素による一連の運転操作が行われる連続した地点を選定することを要旨とする。
【0028】
例えば、交差点等の交通要素では、交差点に進入してから同交差点を通過するまでの間に、車両の減速、加速、方向転換等をさせるための複数種の運転操作要素の一連の運転操作が交差点を含む所定の走行区間の各地点で行われる。そして、こうした運転操作要素の運転操作が行われる地点、換言すれば、各種運転操作が行われるタイミングとは、ドライバ毎に相違し、ドライバ固有の癖が反映されやすい。すなわち、こうした運転操作要素の一連の運転操作の組み合わせ態様は、同一のドライバにおいては共通もしくは類似する一方、異なるドライバ間では共通もしくは類似する蓋然性が極めて低い。
【0029】
そこで、上記構成あるいは方法によるように、運転操作の特徴量として、一連の運転操作が行われる連続した地点のもとで行われる複数種の運転操作要素の操作態様を示すデータを、データベースに登録する。そして、この登録したデータに基づいてドライバを特定することとすれば、特定の交通要素のもとで行われる一連の運転操作のパターンに基づいてドライバを特定することが可能となり、ドライバの特定精度の一層の向上が図られるようになる。
【0030】
請求項6に記載の発明は、請求項5に記載の車両ドライバの特定装置において、前記運転操作要素が、アクセルペダル、ターンランプ、及びブレーキペダルの少なくとも2つの要素からなることを要旨とする。
【0031】
請求項12に記載の発明は、請求項11に記載の車両ドライバの特定方法において、前記運転操作要素として、アクセルペダル、ターンランプ、及びブレーキペダルの少なくとも2つの要素を選定することを要旨とする。
【0032】
アクセルペダル、ターンランプ、及びブレーキペダルといった運転操作要素は、交差点やカーブといった所定の交通要素の各地点でその特性に応じて操作されるものであり、これら運転操作要素が操作される頻度は高く、こうした運転操作要素の運転操作態様はドライバ間でも特に相違する傾向にある。また、こうした運転操作要素毎の操作態様のみならず、アクセルペダル、ターンランプ、及びブレーキペダルの各々が操作される順序やタイミングもドライバ間で相違する傾向にある。
【0033】
そこで、上記構成あるいは方法によれば、一連の地点のもとで行われるアクセルペダル、ターンランプ、及びブレーキペダルといった通常の運転操作において利用されやすくドライバ固有の癖が反映されやすい要素に基づいてドライバを特定することが可能となる。これにより、ドライバの特定をより多くの地点における運転操作の特徴量に基づき行うことが可能になるとともに、その特定精度の一層の向上が図れるようになる。
【図面の簡単な説明】
【0034】
【図1】本発明にかかる車両ドライバの特定装置及び車両ドライバの特定方法の一実施の形態について、同装置及び同方法が適用される車両の概略構成を示すブロック図。
【図2】前方車両が存在しないときに取得された車両操作データ及び緯度経度データの一例を示す図。
【図3】前方車両が存在するときに取得された車両操作データ及び緯度経度データの一例を示す図。
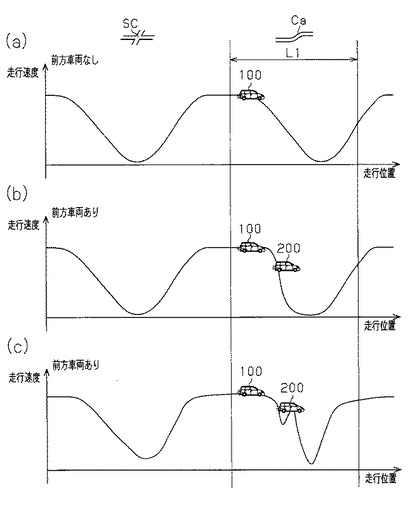
【図4】(a)は、前方車両の存在しないときに車両が交差点及びカーブを通過したときの走行速度の推移例を示す図。(b)及び(c)は、前方車両の存在するときに車両が交差点及びカーブを通過したときの走行速度の推移例を示す図。
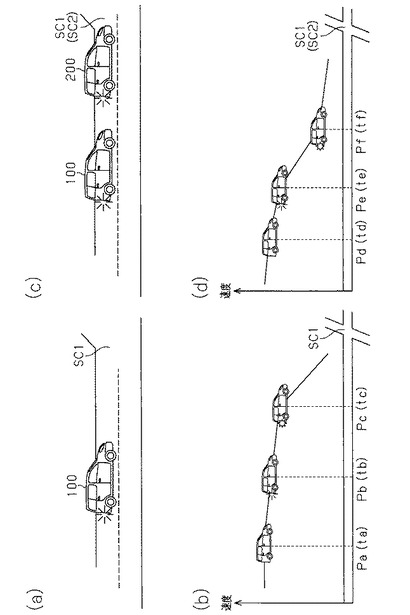
【図5】(a)は、前方車両の存在しない交差点に向かう車両の走行態様の一例を示す図。(b)は、(a)に例示した交差点手前の連続する各地点で行われた運転操作の一例を、車両の走行速度の推移とともに示す図。(c)は、前方車両が存在するときに(a)に例示した交差点と共通もしくは類似する交差点に向かう車両の走行態様の一例を示す図。(d)は、(c)に例示した交差点手前の連続する各地点で行われた運転操作の一例を、車両の走行速度の推移とともに示す図。
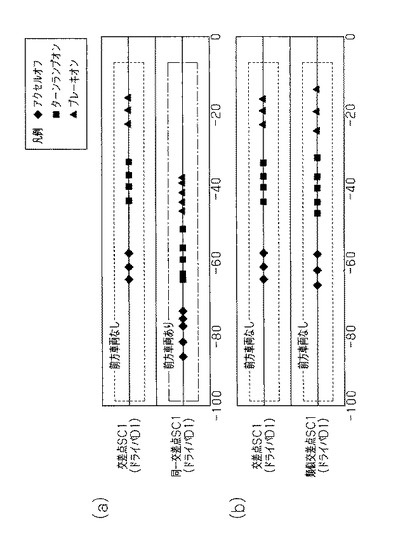
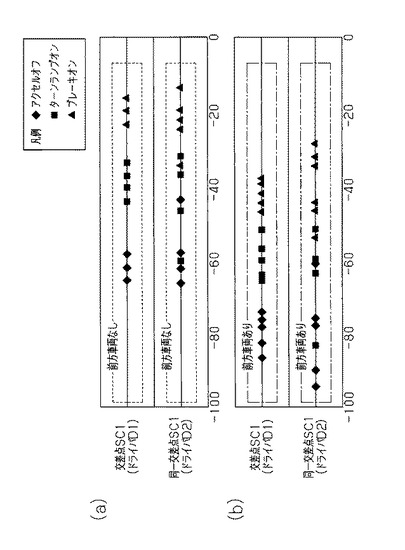
【図6】(a)は、同一の交差点における同一のドライバによる運転操作要素の操作態様の一例を、前方車両の有無の別に示す図。(b)は、類似する交差点における同一のドライバによる運転操作要素の操作態様の一例を示す図。
【図7】(a)は、前方車両が存在しないときの同一の交差点における各別のドライバによる運転操作要素の操作態様の一例を示す図。(b)は、前方車両が存在するときの同一の交差点における各別のドライバによる運転操作要素の操作態様の一例を示す図。
【図8】本実施の形態の車両ドライバの特定装置及び車両ドライバの特定方法によるデータベース化処理の一例を示すフローチャート。
【図9】本実施の形態の車両ドライバの特定装置及び車両ドライバの特定方法によるドライバ特定処理の一例を示すフローチャート。
【発明を実施するための形態】
【0035】
以下、本発明にかかる車両ドライバの特定装置及び車両ドライバの特定方法を具体化した第1の実施の形態について図1〜図9を参照して説明する。なお、本実施の形態の車両ドライバの特定装置及び車両ドライバの特定方法は、例えば複数のユーザに共有される車両に適用されるものである。
【0036】
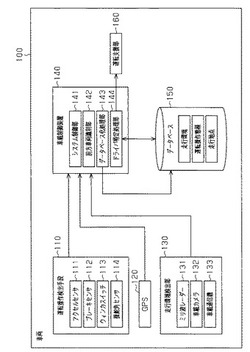
図1に示すように、本実施の形態の車両ドライバの特定装置及び車両ドライバの特定方法が適用される車両100には、同車両100に設けられた各種運転操作要素の操作態様を検出する運転操作検出手段110が設けられている。
【0037】
運転操作検出手段110は、例えば、アクセルセンサ111、ブレーキセンサ112、ウィンカスイッチ113、及び操舵角センサ114等を備えている。運転操作検出手段110は、各センサ等111〜114の検出結果を、同検出結果に基づき各種車載機器を制御する車載制御装置140に出力する。
【0038】
アクセルセンサ111は、車両100のドライバによるアクセルペダルの踏み込み量を検出し、この検出した結果を車載制御装置140に出力する。ブレーキセンサ112は、車両100のドライバによるブレーキペダルの踏込み量を検出し、この検出した結果を車載制御装置140に出力する。ウィンカスイッチ113は、車両100のターンランプ、すなわち方向指示器の使用状態を検出し、その検出結果を車載制御装置140に出力する。また、操舵角センサ114は、車両100のドライバにより操作されるステアリングの操作角度を検出し、その検出結果を車載制御装置140に出力する。
【0039】
また、車両100には、衛星信号を受信し、この受信した衛星信号をもとに車両100の絶対位置、すなわち緯度経度を検出するGPS120が設けられている。GPS120は、車両100の移動に伴って変化する車両100の緯度経度、換言すれば、車両100が走行した各地点の緯度経度を適宜検出し、その検出結果を示す緯度経度データを車載制御装置140に出力する。
【0040】
また一方、車両100には、動的に変動する車両100の走行環境を検出する走行環境検出部130が設けられている。走行環境検出部130は、例えば、ミリ波帯の電波を用いて車両100の進行方向前方を走行する前方車両の存在を検知するミリ波レーダー131、車両100の周辺の状況を撮像する車載カメラ132を備えて構成されている。また、走行環境検出部130は、例えば、車両100の周辺を走行する車両との車車間通信や路上に設けられた路側通信機との路車間通信を行う車載通信機133を備えて構成されている。
【0041】
ミリ波レーダー131は、車両100の進行方向前方を走行する前方車両の存在を検知すると、その検知結果を示す信号を車載制御装置140に出力する。車載カメラ132は、撮像した車両100の周辺を示す画像データを車載制御装置140に適宜出力する。車載通信機133は、例えば、車車間通信を通じて車両100の進行方向前方を走行する前方車両との通信が成立すると、その通信結果を車載制御装置140に出力する。また、車載通信機133は、路車間通信を通じて、車両100の周辺を走行する他車両、特に前方車両の存在や道路上に存在する交通要素の存在を示す情報、及び渋滞情報等の各種情報を取得する。そして、車載通信機133は、この取得した各種情報を車載制御装置140に出力する。
【0042】
このように、本実施の形態の車載制御装置140には、運転操作検出手段110により検出される各種運転操作要素の操作態様を示すデータと車両100の緯度経度を示す緯度経度データとが適宜入力される。また、併せて、本実施の形態の車載制御装置140には、走行環境検出部130により検出された車両100の周辺環境を示す情報が適宜入力される。
【0043】
車載制御装置140は、運転操作検出手段110から入力される各センサ等111〜114の検出結果、すなわち、ドライバによる各種運転操作要素の操作態様を示すデータに基づき、エンジン、ブレーキ、ターンランプ、及びステアリング等の各種車載機器を制御するシステム制御部141を備えている。また、本実施の形態の車載制御装置140は、走行環境検出部130から入力される各信号や画像データに基づき、車両100の進行方向前方を走行する前方車両を車両100の走行環境の中から識別する前方車両識別部142を備えている。また一方、車載制御装置140は、運転操作検出手段110及びGPS120から入力されたデータを前方車両識別部142の識別結果とともにデータベース150に登録するデータベース化処理部143を備えている。また一方、本実施の形態の車載制御装置140は、車両100のドライバを特定する処理を行うドライバ特定処理部144を備えている。
【0044】
このうち、システム制御部141は、運転操作検出手段110から各運転操作要素の検出結果が入力されると、その検出結果に基づいて各種車載機器を制御する。これにより、例えば、ドライバによりアクセルペダルが踏み込まれたことによってアクセルセンサ111の検出結果が変化すると、この検出結果に応じてエンジンの制御量が算出され、この算出結果に応じてエンジンが制御される。
【0045】
また、本実施の形態の前方車両識別部142は、ミリ波レーダー131から車両100の前方車両の存在を示す信号が入力されると、この信号に基づいて車両100の前方に前方車両が存在している旨認識する。また、前方車両識別部142は、車載カメラ132から画像データが入力されると、この画像データの解析を通じて、同画像データに前方車両の存在を示すデータが含まれているか否かを識別する。さらに、前方車両識別部142は、車載通信機133から前方車両との通信が成立した旨を示す信号が入力されると、この信号に基づいて前方車両が存在している旨認識する。また、前方車両識別部142は、車載通信機133から路車間通信から各種情報が入力されると、この情報に基づいて前方車両が存在するか否かを識別する。なお、前方車両識別部142は、例えば、路車間通信を通じて得られた渋滞情報に基づき、車両100が走行するエリアが渋滞中にある旨認識すると、車両100の進行方向前方にも前方車両が存在している旨認識する。前方車両識別部142は、こうして前方車両の存在の有無を識別すると、その識別結果を、データベース化処理部143に出力する。
【0046】
データベース化処理部143は、運転操作検出手段110から各運転操作要素の検出結果が入力されると、この検出結果を示すデータに、GPS120から入力された緯度経度データと前方車両識別部142から入力された識別結果とを関連付ける。また、データベース化処理部143は、それら関連付けたデータを、緯度経度データによって示される地点の別にデータベース150に登録する。なお、データベース化処理部143は、例えば、ドライバが同一であるために運転操作要素の操作態様の特徴量が共通するデータについては、同一のドライバの運転操作に基づくデータとして運転支援部160に登録する。また、データベース化処理部143は、ドライバが相違するために特徴量の相違するデータについては、各別のドライバの運転操作に基づくデータとして運転支援部160に登録する。これにより、運転支援部160には、複数のドライバによる運転操作要素の操作態様を示すデータが、例えばドライバD1〜Dn等といった態様で便宜的に割り振られるドライバの別に適宜登録されることとなる。
【0047】
本実施の形態のドライバ特定処理部144は、運転操作検出手段110及びGPS120から各運転操作要素の検出結果及び車両100の緯度経度データが入力されると、前方車両識別部142から入力された識別結果を参照する。すなわち、各運転操作要素の検出結果及び車両100の緯度経度データが入力されると、ドライバ特定処理部144は、ドライバに運転操作される車両100の進行方向前方に前方車両が存在するか否かを識別する。
【0048】
そして、ドライバ特定処理部144は、前方車両が存在するとき、データベース150に既に登録されている過去の各運転操作要素の操作態様を示すデータ及び該当する緯度経度データのうちで前方車両が存在するときに取得されたデータを参照する。次いで、ドライバ特定処理部144は、ドライバが所定の地点で前方車両の存在する状況下で行っている運転操作要素の操作態様と、同地点と共通もしくは類似する地点において前方車両が存在するときに取得された過去の各運転操作要素の操作態様を示すデータとを照合する。そして、この照合の結果、車両100を運転操作しているドライバの運転操作態様の操作態様の特徴量が、上記割り振られたドライバD1〜Dnのうちのいずれのドライバの運転操作態様の特徴量に近似するかが特定される。その後、この特定結果に基づき、車両100を運転操作しているドライバが上記割り振られたドライバD1〜Dnのうちのいずれのドライバであるかが特定される。
【0049】
一方、ドライバ特定処理部144は、前方車両が存在しないとき、データベース150に既に登録されている過去の各運転操作要素の操作態様を示すデータ及び該当する緯度経度データのうちで前方車両が存在しないときに取得されたデータを参照する。次いで、ドライバ特定処理部144は、この参照するデータが示す所定の地点での運転操作態様の操作態様と、車両100を運転操作するドライバが行っている運転操作要素の操作態様とに基づいて、車両100を運転操作しているドライバを特定する。
【0050】
こうして、ドライバ特定処理部144は、ドライバが運転操作している車両100の進行方向前方を走行する前方車両の有無に応じて特定対象とするドライバを特定すると、この特定結果を、同特定結果に基づき各種運転支援を行う運転支援部160に出力する。
【0051】
一方、データベース150には、ドライバによる運転操作によって各運転操作要素が運転操作される都度、各運転操作要素の操作態様を示すデータが車両100の走行した地点を示す緯度経度データとともに登録される。
【0052】
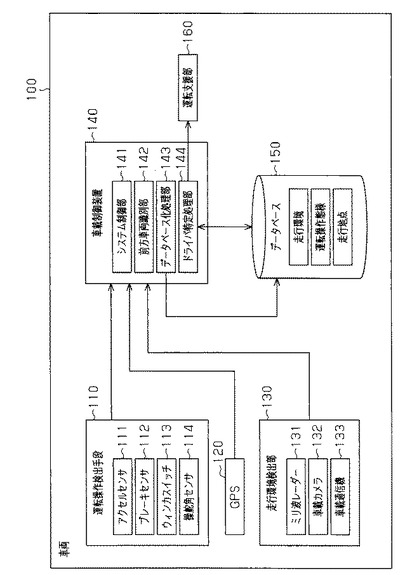
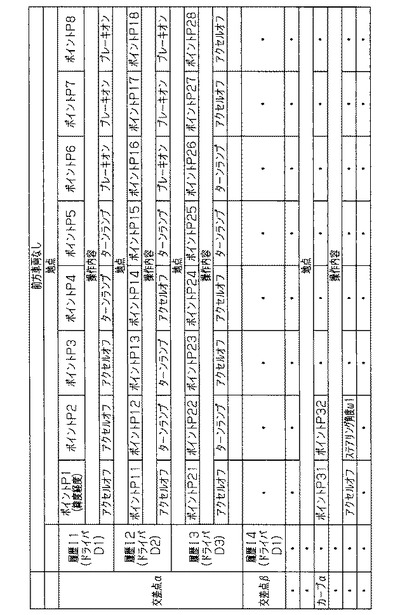
なお、本実施の形態のデータベース化処理部143は、図2及び図3に示すように、アクセルペダル、ターンランプ、ブレーキペダル、及びステアリング等の運転操作要素の操作内容を示すデータと、各運転操作要素が操作されたときの車両100の走行地点である緯度経度を示す緯度経度データとを、交通要素の別にデータベース150に登録する。また、本実施の形態では、図2と図3とにそれぞれ例示すように、データベース150には、前方車両が存在しないときに取得されたデータと前方車両が存在するときに取得されたデータとが、前方車両の有無を識別可能な態様でデータベース150に登録される。
【0053】
また、本実施の形態のデータベース化処理部143は、図1に示すように、例えば、車両100のイグニッションキーがオンとされてからオフとされるまでの間に取得される運転操作要素の操作態様を示すデータと緯度経度データとを、一つの運転履歴、すなわち、同一のドライバの運転履歴としてデータベース150に登録する。これにより、データベース150には、地点毎に行われる運転操作要素の操作態様を示すデータがドライバ毎に登録されることとなる。なお、本実施の形態のデータベース150には、例えば、運転操作要素の操作態様を示すデータに、ドライバ毎のシートポジションやドアミラーの位置などを示すデータが関連付けられて登録されている。
【0054】
運転支援部160は、ドライバ特定処理部144からドライバの特定結果が入力されると、特定されたドライバのシートポジションやドアミラーの位置などを示すデータをデータベース150から抽出する。そして、運転支援部160は、この抽出したデータにて示される位置にシートポジションやドアミラーの位置を調整する。これにより、シートポジションやドアミラーが車両100のドライバ固有の癖に応じて自動的に調整される。また、運転支援部160は、ドライバ特定処理部144からドライバの特定結果が入力されると、この特定されたドライバの運転操作要素の操作態様、換言すれば、同ドライバの運転操作パターンを識別する。そして、運転支援部160は、この識別したドライバの運転操作パターンに応じた運転支援を、音声案内や画像案内、半自動運転等を通じて実行する。この運転支援としては、例えば、特定されたドライバが、交差点やカーブなどの減速を要する地点においてアクセルペダルをオフとするタイミングが遅く、ブレーキペダルの踏込み量が過剰である傾向にあるとき、通常よりも早いタイミングでのアクセルペダルのオフやブレーキペダルのオンを促す運転支援が行われる。また、例えば、車両100の減速時にブレーキペダルの適正な踏込み量を案内する運転支援や、車両100の発進時にアクセルペダルの適正な踏込み量を案内する運転支援が行われる。逆に、特定されたドライバが車両挙動の少ない安定した運転操作や省燃費な運転を行う傾向にあると識別できたとき、運転支援部160は、同ドライバに対する運転支援を行わない。これにより、各々特定されるドライバ固有の癖や運転技量に応じた運転支援が自動的に行われることとなる。
【0055】
次に、本実施の形態の車両ドライバの特定装置及び車両ドライバの特定方法によるドライバの特定原理について図4〜図7を参照して説明する。
図4(a)に示すように、道路上を走行する車両100が交差点SC及びカーブCaの連続する道路を進行していたとする。
【0056】
ここで、車両100の走行速度の推移例を同図4(a)に示すように、減速を要するカーブCaを包含した区間L1を走行する車両100の進行方向前方に前方車両が存在しないときには、車両100のドライバは、カーブCaの線形や道路幅に従って減速を行う。すなわち、車両100のドライバによる運転操作要素の操作態様には、道路上に存在するカーブCaといった交通要素以外の要素に起因する操作態様の変動、すなわち外乱が含まれないものとなっている。そして、車両100が区間L1を走行する際には、進行方向前方に前方車両が存在しない限り、毎回、共通もしくは近似する運転操作が行われる。この結果、車両100の走行速度の推移は、毎回共通もしくは近似するものとなる。
【0057】
これに対し、図4(b)や図4(c)に示すように、たとえ同一のドライバであっても、同ドライバが運転操作する車両100の進行方向前方に前方車両200が存在するときには、例えば前方車両200との車間距離を維持すべく、前方車両200の減速に応じた急な減速操作や段階的な減速操作が行われる。このように、車両100の進行方向前方に前方車両200が存在するときには、車両100の走行態様が、道路上に固有の交通要素であるカーブCaとは異なる要素、すなわち外乱を含んだものなっている。
【0058】
また、図5(a)に示すように、道路上を走行する車両100が交差点SC1に向かって走行しており、この車両100が交差点SC1を左折しようとしていたとする。
この際、図5(b)に示すように、車両100のドライバにより、例えば、車両100が交差点SC1の手前の地点Paに到達するタイミングtaにおいて、アクセルペダルをオンからオフとする操作が行われる。次いで、地点Paを通過した車両100が地点Pbに到達するタイミングtbにおいて、車両100が左折する旨を示すべく例えば進行方向左側のターンランプがオンとされる。そして、地点Pbを通過した車両100が地点Pcに到達するタイミングtcにおいて、車両100を減速すべくブレーキペダルが踏み込まれる。
【0059】
また、図5(c)に示すように、同一のドライバにより操作される車両100が交差点SC1と同一、もしくはこの交差点SC1に道路幅や交差点形状、車線数などが類似する交差点SC2に向かって走行しており、この車両100が交差点SC1(SC2)を左折しようとしていたとする。なお、図5(c)の例では、車両100の進行方向前方に前方車両200が存在している。
【0060】
この際にも、図5(d)に示すように、例えば、車両100が地点Pd、Pe、Pfに到達する各タイミングtd、te、tfにおいて、アクセルペダルのオフ、ターンランプのオン、ブレーキペダルのオンといった操作が順次行われる。
【0061】
しかし、このとき、交差点SC1(SC2)の手前でアクセルペダルのオフ、ターンランプのオン、ブレーキペダルの各操作が行われる各地点Pd、Pe、Pfから交差点SC1(SC2)までの距離はそれぞれ、図5(a)及び(b)に例示した交差点SC1から各地点Pa、Pb、Pcまでの距離とは相違するものとなっている。
【0062】
すなわち、交差点SC1や同交差点SC1に道路幅や交差点形状等が同一もしくは類似する交差点SC2を包含する道路を同一のドライバの運転操作する車両100が走行したとしても、前方車両200が存在するときには、車両100が交差点SC1(SC2)を走行する際の走行態様は相違するようになる。
【0063】
よって、図6(a)に例示するように、前方車両200が存在しないときと前方車両200が存在するときとでは、同一のドライバにより同一の交差点SC1の手前で行われるアクセルペダル、ターンランプ、及びブレーキペダルの操作態様は各々相違するものとなっている。
【0064】
なお、図6(b)に例示するように、例えば、前方車両200が存在しないときにおいて、交差点SC1と同交差点SC1に類似する交差点SC2の手前で同一のドライバにより行われるアクセルペダル、ターンランプ、及びブレーキペダルの操作態様は各々類似するものとなっている。また、図示は省略するが、前方車両200が存在するときにおいても、類似する交差点SC1及びSC2の手前で同一のドライバにより行われるアクセルペダル、ターンランプ、及びブレーキペダルの操作態様は各々類似するものとなる。よって、本実施の形態では、こうした運転操作の特性に鑑み、共通の地点で取得された運転操作要素の操作態様を示すデータがデータベース150に存在しないときには、道路線形や道路幅、車線数等が類似する地点のもとで取得されたデータに基づいてドライバの特定が行われる。
【0065】
また、図7(a)に例示するように、前方車両200が存在しないときにおいて、交差点SC1の手前を異なるドライバD1及びD2がアクセルペダル、ターンランプ、及びブレーキペダルのそれぞれの運転操作要素を操作する地点、並びに各運転操作要素の操作回数は相違するものとなっている。同様に、図7(b)に例示するように、前方車両200が存在するときにおいても、交差点SC1の手前を異なるドライバD1及びD2がアクセルペダル、ターンランプ、及びブレーキペダルのそれぞれの運転操作要素を操作する地点、並びに各運転操作要素の操作回数は相違するものとなっている。すなわち、同一の地点、同一の走行環境下を車両100が走行したとしても、そのドライバが相違するときには、ドライバD1及びD2に固有の癖が反映されることにより各運転操作要素の操作態様の特徴量は相違するものとなる。
【0066】
そこで、本実施の形態では、こうした特性に鑑み、特定対象とするドライバが運転操作する車両100の進行方向前方に前方車両200が存在するか否かを識別した上で、運転操作検出手段110、GPS120、及び走行環境検出部130を通じて取得されたデータを用いてドライバが特定される。
【0067】
以下、本実施の形態の車両ドライバの特定装置及び車両ドライバの特定方法の作用を図8及び図9を参照して説明する。
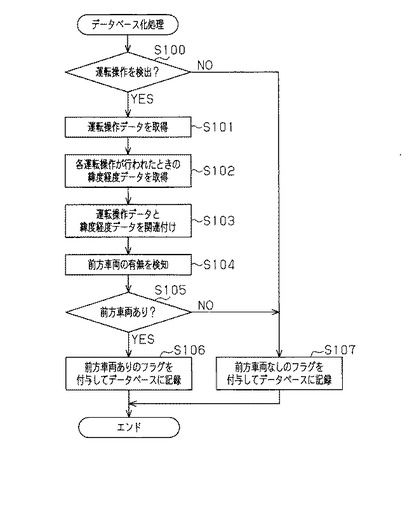
図8に示すように、データベース150の作成時には、まずステップS100において、車両100の走行時においてドライバにより運転操作が行われた旨が検出されると、運転操作された運転操作要素の操作態様を示す運転操作データが取得される(ステップS101)。ここでは、例えば、アクセルペダル、ターンランプ、及びブレーキペダルといった各運転操作要素をオン/オフとする操作を示すデータが、上記アクセルセンサ111、ウィンカスイッチ113、及びブレーキセンサ112により取得される。そして、各運転操作要素の検出結果を示すデータである運転操作データが各々取得される。
【0068】
次いで、それら各運転操作要素が操作されたときの車両100の緯度経度を示す緯度経度データがGPS120により取得され(ステップS102)、この取得された緯度経度データが上記取得された運転操作データの別に関連付けられる(ステップS103)。これにより、例えば、アクセルペダル、ターンランプ、及びブレーキペダルといった各運転操作要素の操作態様を示す各運転操作データに、各運転操作要素が操作されたときの車両100の緯度経度を示す緯度経度データが各々関連付けられる。
【0069】
その後、走行環境検出部130の検出結果をもとに、車両100の進行方向前方に前方車両200が存在するか否かが検知される(ステップS104)。次いで、前方車両200が存在するとき(ステップS105:YES)、運転操作データ及び緯度経度データが前方車両200の存在するときに取得された旨を示すフラグがそれら運転操作データ及び緯度経度データに付与される(ステップS106)。そして、それらフラグの付与された運転操作データ及び緯度経度データがデータベース150に登録される。
【0070】
一方、前方車両200が存在しないとき(ステップS105:NO)、運転操作データ及び緯度経度データが前方車両200の存在しないときに取得された旨を示すフラグがそれら運転操作データ及び緯度経度データに付与される(ステップS107)。そして、それらフラグの付与された運転操作データ及び緯度経度データがデータベース150に登録される。
【0071】
こうして、データベース150には、道路上を走行する車両100のドライバにより運転操作が行われる都度、運転操作データ及び緯度経度データが取得される。そして、それら運転操作データ及び緯度経度データが関連付けされたデータが前方車両の存在の有無を示すフラグの付与された状態でデータベース150に登録されることとなる。こうして、車両100が走行する都度、車両100に搭載されたデータベース150が拡充されることとなる。
【0072】
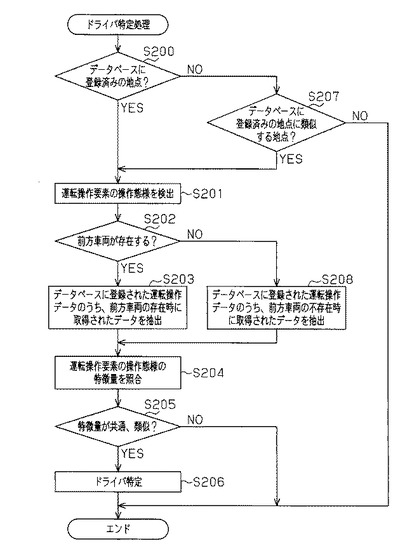
次に、図9に示すように、ドライバの特定に際してはまず、ステップS200において、ドライバが運転操作する車両100が走行している地点と緯度経度が共通の緯度経度データがデータベース150に登録されているか否かが判断される。そして、車両100が走行している地点と緯度経度が同一の緯度経度データがデータベース150に既に登録されているとき、ドライバによる各運転操作要素の操作態様が上記運転操作検出手段110により検出される。また、上記同一の緯度経度データがデータベース150に存在しないときであっても、車両100の走行する地点と道路線形、道路勾配、及び交差点形状の少なくとも1つが類似する地点で取得された運転操作データ及び緯度経度データがデータベース150に存在するときには(ステップS207:YES)、ドライバによる各運転操作要素の操作態様が上記運転操作検出手段110により検出される。
【0073】
次いで、車両100の進行方向前方に前方車両200が存在するか否かが識別される(ステップS202)。そして、前方車両200が存在するときには、データベース150に登録済みのデータのうち、車両100が走行中と共通もしくは類似する地点で取得され、かつ前方車両200の存在するとき取得された1乃至複数の運転操作データがデータベース150から抽出される(ステップS203)。そして、この抽出された運転操作データが示す各運転操作要素の特徴量とステップS201で検出されたドライバによる各運転操作要素の操作態様の特徴量とが照合される(ステップS204)。
【0074】
また、ドライバが運転操作する車両100の進行方向前方に前方車両200が存在しないときには(ステップS202:NO)、データベース150に登録済みのデータのうち、車両100が走行中と共通もしくは類似する地点で取得され、かつ前方車両200の存在しないときに取得された1乃至複数の運転操作データがデータベース150から抽出される(ステップS208)。そして、この抽出された運転操作データが示す各運転操作要素の特徴量とステップS201で検出されたドライバによる各運転操作要素の操作態様の特徴量とが照合される(ステップS204)。
【0075】
次いで、こうした照合の結果、特徴量が共通もしくは類似するデータがデータベース150に存在するときには(ステップS205:YES)、車両100を運転操作しているドライバが、例えばドライバD1としてデータベース150に登録されているドライバであると特定される(ステップS206)。
【0076】
こうして、ドライバが特定されると、例えば、ドライバD1に特有のデータとしてデータベース150に登録されているシートポジションやドアミラーの位置などを示すデータに基づいてシートポジションやドアミラーの位置調整が行われる。また、例えば、特定されたドライバ固有の走行パターンに応じた運転支援が行われる。
【0077】
一方、特徴量の照合の結果、特徴量が共通もしくは類似するデータがデータベース150に存在しないときには(ステップS205:NO)、ドライバが特定されることなく本処理が終了される。そして、車両100の移動に伴って同車両100の走行する地点が変化すると、この地点で行われた各運転操作要素の操作態様の特徴量と、データベース150に登録済みの運転操作データの特徴量とが照合される。こうして、ドライバが特定されるまで本処理が実行されることとなるとともに、ドライバが特定されるまでの間、例えば標準のドライバ向けの運転支援が行われる。同様に、ステップS206において、ドライバを特定できなかったときにも、例えば標準のドライバ向けの運転支援が行われることとなる。
【0078】
以上説明したように、本実施の形態にかかる車両ドライバの特定装置及び車両ドライバの特定方法によれば、以下の効果が得られるようになる。
(1)ドライバによる運転操作の特徴量を示すデータを当該運転操作の行われた走行環境の別にデータベース150に登録し、このデータベース150に登録したデータのうち特定対象とするドライバの運転する車両と走行環境が共通もしくは類似するデータを用いてドライバを特定した。このため、特定対象とするドライバの運転する車両の走行環境が変化したとしても、この走行環境に対応するデータを用いてドライバを特定することが可能となる。そのため、ドライバの運転操作の特徴量を変化させ得る走行環境が変化したとしても、その影響を受けることなく、ドライバを特定することが可能となる。これにより、運転操作の特徴量に基づくドライバの特定をより高精度に行うことが可能となる。
【0079】
(2)ドライバによる運転操作の特徴量を示す運転操作データを、当該運転操作される車両100の進行方向前方を走行する前方車両200の有無の別に登録した。そして、特定対象とするドライバの運転する車両100の進行方向前方を走行する前方車両200の有無を当該車両100の走行環境として識別し、この識別した前方車両の有無状況の共通するデータをドライバの特定に用いることとした。このため、ドライバの特定に用いる運転操作要素の操作態様の特徴量が前方車両200の存在に起因して変化したとしても、この変化した特徴量に基づき行われるドライバの特定にかかる精度を維持することが可能となる。すなわち、前方車両200の存在に起因して上記特徴量が変化しても、特徴量が変化したために特定対象とするドライバが他のドライバとして特定されることが抑制される。
【0080】
(3)ドライバの運転操作を示す運転操作データを、車両100の走行する地点の別にデータベース150に登録した。そして、データベース150に登録された運転操作データのうち、運転操作の行われた地点及び走行環境が共に共通もしくは類似するデータを用いて特定対象とするドライバを特定することとした。このため、データベース150に登録された運転操作データ及び緯度経度データが取得された状況と走行環境が共通もしくは類似し、かつ、車両100の走行する地点が共通する状況下で行われた運転操作に基づいてドライバを特定することが可能となる。これにより、複数人のドライバの各地点における運転操作を示す運転操作データをデータベース150に登録しつつも、車両の操作環境が極めて近似する状況下で行われた運転操作の特徴量に基づいてドライバを特定することが可能となり、ドライバの特定精度が好適に高められるようになる。
【0081】
(4)上記地点として、道路線形、道路勾配、及び交差点形状の少なくとも1つが共通もしくは類似する地点を選定した。そして、特定対象とするドライバの運転操作する車両100が走行した地点と緯度経度が共通する地点で得られた運転操作データや緯度経度データがデータベース150に存在するとき、それら各データを用いてドライバを特定した。また、特定対象とするドライバの運転操作する車両100が走行した地点と緯度経度が共通する地点で得られた運転操作データや緯度経度データがデータベース150に存在しないとき、特定対象とするドライバの運転操作する車両100が走行した地点と道路線形、道路勾配、及び交差点形状の少なくとも1つが類似する地点で取得された運転操作データや緯度経度データを用いてドライバを特定した。このため、走行環境と併せて地点を加味したドライバの特定を行いつつも、類似する地点で取得されたデータさえデータベース150に存在すれば、ドライバを特定することが可能となる。これにより、データベース150に登録されたデータを用いてドライバを特定する上で、特定に用いるデータの選定範囲が拡充され、ひいては、ドライバを特定可能な機会が増大することとなる。
【0082】
(5)ドライバによる運転操作の特徴量として、特定の交通要素のもとで行われる複数種の運転操作要素の操作態様を選定した。また、上記地点として、特定の交通要素のもとで行われる複数種の運転操作要素による一連の運転操作が行われる連続した地点を選定した。これにより、特定の交通要素のもとで行われる一連の運転操作のパターンに基づいてドライバを特定することが可能となり、ドライバの特定精度の一層の向上が図られるようになる。
【0083】
(6)運転操作要素として、アクセルペダル、ターンランプ、及びブレーキペダルの少なくとも2つの要素を選定した。このため、一連の地点のもとで行われるアクセルペダル、ターンランプ、及びブレーキペダルといった通常の運転操作において利用されやすくドライバ固有の癖が反映されやすい要素に基づいてドライバを特定することが可能となる。これにより、ドライバの特定をより多くの地点における運転操作の特徴量に基づき行うことが可能になるとともに、その特定精度の一層の向上が図れるようになる。
【0084】
なお、上記実施の形態は、以下のような形態をもって実施することもできる。
・走行環境検出部130を、ミリ波レーダー131、車載カメラ132、及び車載通信機133によって構成した。これに限らず、ミリ波レーダー131、車載カメラ132、及び車載通信機133の少なくとも1つによって走行環境検出部130を構成してもよい。この他、車両100の周辺に存在する前方車両200や人物等の存在を検出可能なものであれば運転操作検出手段として採用することが可能である。
【0085】
・該当する地点の運転操作データが存在しないとき、道路線形、道路勾配、及び交差点形状の少なくとも1つが類似する地点で取得された運転操作データを用いてドライバの特定を行った。これに限らず、特定対象とするドライバの運転操作する車両100の走行する地点に道路線形、道路勾配、及び交差点形状の全てが類似する地点で取得された運転操作データ等を用いてドライバの特定を行うようにしてもよい。また併せて、道路線形、道路勾配、及び交差点形状の少なくとも1つが類似し、かつ、運転操作の特徴量を示すデータが取得されたときの路面状態、時間帯、及び車両100周辺の天候が、車両100の走行時における路面状態、時間帯、及び車両100周辺の天候と類似しているとき、それら各要素が類似する地点で取得された運転操作データ等を用いてドライバの特定を行うようにしてもよい。また、該当する地点の運転操作データが存在しないとき、車両100の走行時における路面状態、時間帯、及び天候の少なくとも1つが類似する地点で取得された運転操作データ等を用いてドライバの特定を行うようにしてもよい。この他、ドライバの特定に用いる運転操作データとは、同地点におけるドライバに固有の運転操作のパターンが反映される地点で取得されたデータであればよく、適宜選択することが可能である。なお、これらの場合には、路面状態、時間帯、及び車両100周辺の天候等が、動的に変動する車両100の走行環境となる。
【0086】
・該当する地点と共通もしくは類似する地点におけるドライバの運転操作の特徴量を示す運転操作データがデータベース150に存在しないとき(図9 ステップS207:NO)、その他の地点で取得された運転操作データ等を用いてドライバの特定を行った。これに限らず、該当する地点と共通もしくは類似する地点におけるドライバの運転操作の特徴量を示す運転操作データがデータベース150に存在しないときには、特定対象とするドライバの特定に併せて当該ドライバによる運転操作の特徴量を示すデータをデータベース150に新規登録するようにしてもよい。
【0087】
・データベース150に登録済みの運転操作データ等を用いてドライバを特定できなかったとき、標準のドライバ向けの運転支援を行うこととした。これに限らず、ドライバを特定できなかったときには、運転支援を行わないようにしてもよい。
【0088】
・上記実施の形態では、ドライバを特定するとともに、特定したドライバの運転操作パターンに応じた運転支援を実行した。これに限らず、例えば、車両100に搭載される車載情報端末等で利用可能なアプリケーションやコンテンツデータが課金制であるとき、課金したドライバ、すなわち正当な利用権限を有するドライバを、同ドライバの運転操作の特徴量に基づいて特定するようにしてもよい。この場合には、ドライバが車両100の利用中にアプリケーションやコンテンツデータに課金したとき、同ドライバがアプリケーションやコンテンツデータに課金した旨を示すデータが、同ドライバの運転操作の特徴量を示すデータに関連付けられてデータベース150に登録される。そして、ドライバの運転操作の特徴量に基づき同ドライバが特定されると、同ドライバがアプリケーションやコンテンツデータの利用権限を有するか否かが併せて特定されることとなる。またこの他、例えば、データベース化が完了したデータベース150に登録済みのデータに基づいてドライバを特定するときができないときには、この特定できないドライバが車両100の不正利用者であると特定するようにしてもよい。そして、正規のドライバに車両100が不正利用されている旨を報知したり、不正利用者であると特定されたドライバに対して警告を促すようにしてもよい。またこの他、例えば、ドライバの自宅等の拠点やドライバの利用頻度の高い訪問地点に関するデータをドライバの運転操作の特徴量を示すデータに関連付けて、それら各データをデータベース150に登録するようにしてもよい。この場合には、運転操作の特徴量に基づきドライバが特定されると、同特定されたドライバの特徴量を示すデータに関連付けられている拠点や利用頻度の高い訪問地点が特定される。そして、例えば、この特定された拠点や訪問地点が経路案内に際しての目的地の候補として提示されることとなる。このため、ドライバが車両100を運転操作する過程で同ドライバの拠点や利用頻度の高い訪問地点が自動的に特定され、それら特定された拠点や訪問地点をドライバ毎に提示することが可能となる。これにより、拠点や訪問地点が異なる複数のドライバが車両100を利用するようなときにも、ドライバ毎に拠点や訪問地点を提示したり、それら拠点や訪問地点までの経路案内を行ったりすることが可能となる。
【0089】
・運転操作要素として、アクセルペダル、ターンランプ、及びブレーキペダルの少なくとも2つの要素を選定した。これに限らず、運転操作要素としては、アクセルペダル、ターンランプ、及びブレーキペダルのうち一つの要素であってもよい。またこの他、ドライバの特定に用いられる運転操作要素としては、道路上の各地点の特性に応じて操作される要素であればよく、例えば、ステアリング、エンジンブレーキ、手動変速機等の少なくとも1つであってもよい。
【0090】
・運転操作の特徴量として、特定の交通要素のもとで行われる複数種の運転操作要素の操作態様を選定した。これに限らず、運転操作の特徴量としては、例えば、特定の交通要素のもとで行われるアクセルペダルのみの操作態様といったように、一種の運転操作要素の操作態様を選定するようにしてもよい。また、ドライバの特定に用いられる地点とは、同地点の特性に応じて運転操作要素の操作量や操作タイミングなどの運転操作の特徴量が変化する地点であればよく、交差点やカーブ等の特定の交通要素が存在しない地点であってもよい。
【0091】
・上記地点として、複数種の運転操作要素による一連の運転操作が行われる連続した地点を選定した。これに限らず、上記地点としては、複数種の運転操作要素による一連の運転操作が行われる連続した地点のうちの一つの地点であってもよい。この場合には、例えば、図5(a)及び(b)に示した例では、交差点SC1の手前の連続した地点Pa〜Pcのうち、地点Paで行われた運転操作のみや、地点Pbで行われた運転操作のみに基づいてドライバが特定されることとなる。またこの他、ドライバの特定に用いる運転操作データとは、ドライバによる運転操作を通じて取得された運転操作データのうち、走行環境が共通もしくは類似する状況下で取得されたデータであればよい。
【0092】
・車両100の走行環境として前方車両200の有無を識別し、この識別結果に応じた運転操作データをドライバの特定に際して用いることとした。これに限らず、車両100の走行環境として例えば渋滞の有無を識別し、渋滞の有無の別にドライバによる運転操作の特徴量を示す運転操作データをデータベース150に登録するようにしてもよい。そして、ドライバの特定に際しては、同ドライバが運転操作する車両100の走行するエリアが渋滞中であるかを識別し、この識別結果に応じて、渋滞時に取得された運転操作データと非渋滞時に取得された運転操作データとを使い分けるようにしてもよい。これによれば、ドライバによる運転操作が渋滞時と非渋滞時とで相違し、それぞれにドライバ固有の癖が反映される傾向にあったとしても、渋滞状況を加味してドライバを特定することが可能となる。また、例えば、車両100の走行環境として例えば道路付近に存在する人や障害物の有無を識別し、人や障害物の有無の別にドライバによる運転操作の特徴量を示す運転操作データをデータベース150に登録するようにしてもよい。そして、ドライバの特定に際しては、同ドライバが運転操作する車両100の走行する道路付近に人や障害物が存在するかを識別し、この識別結果に応じて、人や障害物が存在するときに取得された運転操作データと人や障害物が存在しないときに取得された運転操作データとを使い分けるようにしてもよい。これによれば、人や障害物の存在に起因してドライバによる運転操作が変化し、この変化する運転操作にドライバ固有の癖が反映される傾向にあったとしても、人や障害物の存在を加味してドライバを特定することが可能となる。この他、ドライバの特定、及び運転操作の登録時に識別する走行環境とは、ドライバの運転操作を変化させ得る動的に変動する環境であればよく、適宜変更することが可能である。
【0093】
・上記各実施の形態では、データベース化処理部143、ドライバ特定処理部144、及びデータベース150を車両100に搭載した。これに限らず、データベース化処理部143、ドライバ特定処理部144、及びデータベース150を、ドライバの運転操作の特徴量を示すデータが集約される管理センターに設ける構成としてもよい。この構成では、この管理センターと車両100との間での通信を通じて、車両100のドライバによる運転操作の特徴量と運転操作の行われた地点とを示すデータが車両100から管理センターに送信される。そして、管理センターでは、車両100から送信されたデータとデータベース150に登録されているデータとに基づいて、車両100のドライバが特定される。これにより、車載制御装置140の構成の簡略化が図られるようになる。また、これにより、ドライバの特定に必要なデータを管理センターで一括管理することが可能になるとともに、ドライバの特定に必要な処理を管理センターで一括して行うことが可能となる。
【符号の説明】
【0094】
100…車両、110…運転操作検出手段、111…アクセルセンサ、112…ブレーキセンサ、113…ウィンカスイッチ、114…操舵角センサ、120…GPS、130…走行環境検出部、131…ミリ波レーダー、132…車載カメラ、133…車載通信機、140…車載制御装置、141…システム制御部、142…前方車両識別部、143…データベース化処理部、144…ドライバ特定処理部、150…データベース、160…運転支援部、200…前方車両、Ca…カーブ、SC、SC1…交差点、SC2…SC1に類似する交差点。
【技術分野】
【0001】
本発明は、車両を運転操作するドライバの特定に利用して有益な車両ドライバの特定装置及び車両ドライバの特定方法に関する。
【背景技術】
【0002】
近年、車両のセキュリティーを高めるべく、車両のドライバを特定し、この特定結果に基づいて車両のドライバが正規ユーザであるか否かを認証するようにしたシステムなどが開発されている。また、この特定結果に基づき、ルームミラーやシートポジションの位置調整などを車両のドライバに合わせて自動的に行うシステムの開発も検討されている。
【0003】
一方、こうした車両ドライバの特定方法としては、IDキーやIDカードに付与されているID情報と車載機に予め登録されたID情報とを照合することにより、IDキーやIDカードの所有者、すなわち車両のドライバを特定する方法がある。すなわちこの方法では、認証用のIDキーやIDカードなどの物理的な認証用の媒体を正規のユーザに予め配布するとともに、それらIDキーやIDカードに付与されるID情報を車載機に予め登録することとなる。
【0004】
ところで、このようにIDキーやIDカードといった物理的な媒体を利用してドライバを特定する方法では、それらIDキーやIDカードが不正入手される可能性も否定できない。そして、それらIDキーやIDカードが不正入手されるようなことがあると、正規ユーザではないドライバが正規ユーザであるかのごとく誤って認証されてしまうなど、セキュリティーを担保することが難しくなる。さらに、このような物理的な媒体を用いてドライバを特定しようとすると、ドライバは、車両を利用する都度、いちいち同媒体を用いて認証を受ける必要があるなど、利便性を欠くものともなっている。
【0005】
そこで、例えば特許文献1に記載のシステムを含む従来のシステムでは、車載機の操作態様、車両の減速量、発進時の加速度、車線変更のタイミングなど、各ドライバによる運転操作の操作特性を示すデータをデータベースに登録するようにしている。そして、ドライバの特定に際しては、データベースに登録されたデータにて示される操作特性を導出するための車両制御をナビゲーション装置や車間距離制御装置を介して行い、この車両制御に応答して行われるドライバの運転操作の特性とデータベースに登録されているデータにて示される操作特性とが照合される。そしてその後、この照合結果をもとに、車両を運転しているドライバが特定される。これにより、IDキーやIDカードなどの物理的な媒体を用いずとも、また、ドライバを特定するための所定の操作をドライバに要求せずとも、ドライバを特定することができるようになる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2008−222167号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
ところで、道路上における車両の走行には、ドライバによる運転操作に影響を及ぼす様々な変動要素が存在する。また、こうした変動要素は、時間帯や走行地点によって動的に変化する。このため、たとえ同一のドライバであっても、例えば車載機の操作態様、車両の減速量、発進時の加速度、車線変更のタイミングなど、道路上を走行する車両のもとで行われる運転操作の内容や各種操作要素の操作量は、それら変動要素の存在に起因して大きく変化することとなる。すなわち、たとえ同一のドライバであっても、車載機の操作態様や車両の減速量などの操作特性が必ずしも一定の傾向になるとは限らない。
【0008】
こうしたことから、ドライバによる各種操作要素の操作特性のみに基づいてドライバを特定することは難しく、その特定精度を向上する上でなお改良の余地を残すものとなっている。
【0009】
本発明は、このような実情に鑑みてなされたものであり、その目的は、車両ドライバの特定にかかる利便性の高い運転操作の学習を通じての車両ドライバの特定をより高精度に行うことのできる車両ドライバの特定装置及び車両ドライバの特定方法を提供することにある。
【課題を解決するための手段】
【0010】
以下、上記課題を解決するための手段及びその作用効果について記載する。
請求項1に記載の発明は、車両を運転操作するドライバの運転操作態様に基づいてドライバの特定を行う車両ドライバの特定装置であって、ドライバによる運転操作の特徴量を示すデータが当該運転操作の行われた地点において動的に変動する走行環境の別に登録されるデータベースと、前記データベースに登録されたデータのうち、特定対象とするドライバの運転する車両と走行環境が共通もしくは類似するデータを用いてドライバを特定する処理を行うドライバ特定処理部と、を備えることを要旨とする。
【0011】
請求項7に記載の発明は、車両を運転操作するドライバの運転操作態様に基づいてドライバの特定を行う車両ドライバの特定方法であって、ドライバによる運転操作の特徴量を示すデータを当該運転操作の行われた地点において動的に変動する走行環境の別にデータベースに登録するステップと、前記データベースに登録したデータのうち、特定対象とするドライバの運転する車両と走行環境が共通もしくは類似するデータを用いてドライバを特定するステップと、を含むことを要旨とする。
【0012】
共通もしくは類似する走行環境下で行われる運転操作の特徴量は共通する傾向にあるものの、たとえ同一のドライバであっても走行環境が相違するときには運転操作の特徴量が相違する傾向にある。また、走行環境が共通もしくは類似したとしても、同走行環境下を運転するドライバが相違するときには、運転操作の特徴量は相違する傾向にある。さらに、各地点における走行環境とは、各地点の地域特性や各地点の利用状況に応じて動的に変動する。そして、運転操作の特徴量とは、このように動的に変動する走行環境に起因して、逐次変化することとなる。 そこで、上記構成あるいは方法によるように、ドライバによる運転操作の特徴量を示すデータを当該運転操作の行われた地点において動的に変動する走行環境の別にデータベースに登録する。そして、ドライバの特定に際しては、或る走行環境のもとで特定対象とするドライバにより行われた運転操作の特徴量と、この走行環境に共通もしくは類似する走行環境下で行われた運転操作の特徴量を示すデータとを用いて、ドライバを特定する。このため、特定対象とするドライバの運転する車両の走行環境が動的に変化したとしても、この走行環境に対応するデータを用いてドライバを特定することが可能となる。そのため、ドライバの運転操作の特徴量を変化させ得る走行環境が変化したとしても、その影響を受けることなく、ドライバを特定することが可能となる。これにより、運転操作の特徴量に基づくドライバの特定をより高精度に行うことが可能となる。
【0013】
請求項2に記載の発明は、請求項1に記載の車両ドライバの特定装置において、ドライバによる運転操作の特徴量を示すデータが登録される前記走行環境の別が、当該運転操作される車両の進行方向前方を走行する前方車両の有無であり、前記ドライバ特定処理部は、前記特定対象とするドライバの運転する車両と走行環境が共通もしくは類似するデータとして、当該車両の進行方向前方を走行する前方車両の有無の共通するデータを用いてドライバを特定する処理を行うことを要旨とする。
【0014】
請求項8に記載の発明は、請求項7に記載の車両ドライバの特定方法において、前記登録するステップにおいて、ドライバによる運転操作の特徴量を示すデータを、当該運転操作される車両の進行方向前方を走行する前方車両の有無の別に前記データベースに登録し、前記特定するステップにおいて、特定対象とするドライバの運転する車両と走行環境が共通もしくは類似するデータとして当該車両の進行方向前方を走行する前方車両の有無の共通するデータを用いて特定対象とするドライバを特定することを要旨とする。
【0015】
ドライバによる運転操作は、同ドライバが運転する車両の進行方向前方を走行する前方車両に追従する態様で行われる傾向にある。すなわち、前方車両が減速等を行ったときには、これに追従して同前方車両の進行方向後方を走行する車両のドライバは、前方車両との車間距離を維持すべく減速操作等を行う傾向にある。そして、このように前方車両の存在を加味して行われる運転操作の特徴量にもドライバ固有の癖が反映される結果、その特徴量がドライバ毎に相違することとなる。
【0016】
そこで、上記構成あるいは方法によるように、走行環境としての前方車両の有無を示すデータを運転操作の特徴量を示すデータとともにデータベースに登録する。そして、ドライバの特定に際しては、特定対象とするドライバが運転する車両に前方車両が識別される。この結果、前方車両が存在するときには、前方車両が存在する状況下で取得されたデータベースに登録済みのデータを用いてドライバの特定が行われる。一方、前方車両が存在しないときには、前方車両が存在しない状況下で取得されたデータベースに登録済みのデータを用いてドライバの特定が行われる。このように上記構成あるいは方法によれば、運転操作に影響を及ぼす前方車両の有無に応じてドライバの特定に用いるデータを使い分けることにより、前方車両の存在如何に拘わらずドライバを高精度に特定することが可能となる。
【0017】
請求項3に記載の発明は、請求項1または2に記載の車両ドライバの特定装置において、前記データベースには、前記走行環境の別に登録されるドライバによる運転操作の特徴量を示すデータがドライバによる運転操作の行われた地点毎に登録されるものであり、前記ドライバ特定処理部は、前記データベースに登録されたデータのうち、運転操作の行われた地点及び走行環境が共に共通もしくは類似するデータを用いて特定対象とするドライバを特定する処理を行うことを要旨とする。
【0018】
請求項9に記載の発明は、請求項8に記載の車両ドライバの特定方法において、前記登録するステップにおいて、走行環境の別に登録されるドライバによる運転操作の特徴量を示すデータをドライバによる運転操作の行われた地点毎に登録し、前記特定するステップにおいて、前記データベースに登録したデータのうち、運転操作の行われた地点及び走行環境が共に共通もしくは類似するデータを用いて特定対象とするドライバを特定することを要旨とする。
【0019】
車両の走行する各地点では、その地点に応じた運転操作が行われる傾向にあり、こうした運転操作にはドライバに固有の癖等が反映される傾向にある。そして、同一のドライバが或る地点のもとで行う運転操作の特徴量は共通もしくは類似する傾向にあり、地点毎に行われる運転操作にはドライバ固有の癖が特に反映されるものとなっている。すなわち、地点毎に行われる運転操作の特徴量は、同一のドライバのものは共通もしくは類似する一方、異なるドライバ間では相違する蓋然性が高い。こうしたことから、走行環境が共通し、さらに走行地点が共通する状況下で同一のドライバにより行われる車両操作は極めて再現性が高く、運転操作の特徴量が共通する傾向にある。
【0020】
そこで、上記構成あるいは方法によるように、各地点で行われる運転操作の特徴量を走行環境毎にデータベースに登録する。そして、ドライバの特定に際しては、地点及び走行環境が共に共通もしくは類似する状況下で取得されたデータを用いる。このため、車両の操作環境が極めて近似する状況下で行われた運転操作の特徴量に基づいてドライバを特定することが可能となる。
【0021】
請求項4に記載の発明は、請求項3に記載の車両ドライバの特定装置において、前記地点とは、道路線形、道路勾配、及び交差点形状の少なくとも1つが共通もしくは類似する地点であることを要旨とする。
【0022】
請求項10に記載の発明は、請求項9に記載の車両ドライバの特定方法において、前記地点として、道路線形、道路勾配、及び交差点形状の少なくとも1つが共通もしくは類似する地点を選定することを要旨とする。
【0023】
道路線形、道路勾配、交差点形状といった要素のもとで行われる運転操作とは、こうした要素毎に固有のものであり、またドライバに固有の癖も反映され易い。また、このように道路線形、道路勾配、及び交差点形状といった要素は、道路上に多く存在し、エリアが異なったとしても類似する傾向にある。
【0024】
そこで、上記構成あるいは方法によるように、道路線形、道路勾配、交差点形状といった各要素のもとで行われた運転操作の特徴量を示すデータをデータベースに登録する。そして、ドライバの特定に際しては、例えば、ドライバが運転操作を行った地点と共通する地点で行われた運転操作の特徴量を示すデータがデータベースに存在するときには、このデータを用いてドライバの特定が行われる。これにより、地点が共通し、かつ走行環境が共通もしくは類似する状況下で行われた運転操作の特徴量に基づいてドライバを高精度に特定することが可能となる。
【0025】
一方、ドライバが運転操作を行った地点と共通する地点で行われた運転操作の特徴量を示すデータがデータベースに存在しなくても、ドライバが運転操作を行った地点と類似する地点で行われた運転操作の特徴量を示すデータがデータベースに存在するときには、このデータを用いてドライバを特定することが可能となる。これにより、走行環境と併せて地点を加味したドライバの特定を行いつつも、類似する地点で取得されたデータさえデータベースに存在すれば、ドライバの特定を行うことが可能となる。
【0026】
請求項5に記載の発明は、請求項3または4に記載の車両ドライバの特定装置において、前記運転操作の特徴量が、特定の交通要素のもとで行われる複数種の運転操作要素の操作態様であり、前記地点が、特定の交通要素のもとで行われる複数種の運転操作要素による一連の運転操作が行われる連続した地点であることを要旨とする。
【0027】
請求項11に記載の発明は、請求項9または10に記載の車両ドライバの特定方法において、前記運転操作の特徴量が、特定の交通要素のもとで行われる複数種の運転操作要素の操作態様であり、前記地点として、特定の交通要素のもとで行われる複数種の運転操作要素による一連の運転操作が行われる連続した地点を選定することを要旨とする。
【0028】
例えば、交差点等の交通要素では、交差点に進入してから同交差点を通過するまでの間に、車両の減速、加速、方向転換等をさせるための複数種の運転操作要素の一連の運転操作が交差点を含む所定の走行区間の各地点で行われる。そして、こうした運転操作要素の運転操作が行われる地点、換言すれば、各種運転操作が行われるタイミングとは、ドライバ毎に相違し、ドライバ固有の癖が反映されやすい。すなわち、こうした運転操作要素の一連の運転操作の組み合わせ態様は、同一のドライバにおいては共通もしくは類似する一方、異なるドライバ間では共通もしくは類似する蓋然性が極めて低い。
【0029】
そこで、上記構成あるいは方法によるように、運転操作の特徴量として、一連の運転操作が行われる連続した地点のもとで行われる複数種の運転操作要素の操作態様を示すデータを、データベースに登録する。そして、この登録したデータに基づいてドライバを特定することとすれば、特定の交通要素のもとで行われる一連の運転操作のパターンに基づいてドライバを特定することが可能となり、ドライバの特定精度の一層の向上が図られるようになる。
【0030】
請求項6に記載の発明は、請求項5に記載の車両ドライバの特定装置において、前記運転操作要素が、アクセルペダル、ターンランプ、及びブレーキペダルの少なくとも2つの要素からなることを要旨とする。
【0031】
請求項12に記載の発明は、請求項11に記載の車両ドライバの特定方法において、前記運転操作要素として、アクセルペダル、ターンランプ、及びブレーキペダルの少なくとも2つの要素を選定することを要旨とする。
【0032】
アクセルペダル、ターンランプ、及びブレーキペダルといった運転操作要素は、交差点やカーブといった所定の交通要素の各地点でその特性に応じて操作されるものであり、これら運転操作要素が操作される頻度は高く、こうした運転操作要素の運転操作態様はドライバ間でも特に相違する傾向にある。また、こうした運転操作要素毎の操作態様のみならず、アクセルペダル、ターンランプ、及びブレーキペダルの各々が操作される順序やタイミングもドライバ間で相違する傾向にある。
【0033】
そこで、上記構成あるいは方法によれば、一連の地点のもとで行われるアクセルペダル、ターンランプ、及びブレーキペダルといった通常の運転操作において利用されやすくドライバ固有の癖が反映されやすい要素に基づいてドライバを特定することが可能となる。これにより、ドライバの特定をより多くの地点における運転操作の特徴量に基づき行うことが可能になるとともに、その特定精度の一層の向上が図れるようになる。
【図面の簡単な説明】
【0034】
【図1】本発明にかかる車両ドライバの特定装置及び車両ドライバの特定方法の一実施の形態について、同装置及び同方法が適用される車両の概略構成を示すブロック図。
【図2】前方車両が存在しないときに取得された車両操作データ及び緯度経度データの一例を示す図。
【図3】前方車両が存在するときに取得された車両操作データ及び緯度経度データの一例を示す図。
【図4】(a)は、前方車両の存在しないときに車両が交差点及びカーブを通過したときの走行速度の推移例を示す図。(b)及び(c)は、前方車両の存在するときに車両が交差点及びカーブを通過したときの走行速度の推移例を示す図。
【図5】(a)は、前方車両の存在しない交差点に向かう車両の走行態様の一例を示す図。(b)は、(a)に例示した交差点手前の連続する各地点で行われた運転操作の一例を、車両の走行速度の推移とともに示す図。(c)は、前方車両が存在するときに(a)に例示した交差点と共通もしくは類似する交差点に向かう車両の走行態様の一例を示す図。(d)は、(c)に例示した交差点手前の連続する各地点で行われた運転操作の一例を、車両の走行速度の推移とともに示す図。
【図6】(a)は、同一の交差点における同一のドライバによる運転操作要素の操作態様の一例を、前方車両の有無の別に示す図。(b)は、類似する交差点における同一のドライバによる運転操作要素の操作態様の一例を示す図。
【図7】(a)は、前方車両が存在しないときの同一の交差点における各別のドライバによる運転操作要素の操作態様の一例を示す図。(b)は、前方車両が存在するときの同一の交差点における各別のドライバによる運転操作要素の操作態様の一例を示す図。
【図8】本実施の形態の車両ドライバの特定装置及び車両ドライバの特定方法によるデータベース化処理の一例を示すフローチャート。
【図9】本実施の形態の車両ドライバの特定装置及び車両ドライバの特定方法によるドライバ特定処理の一例を示すフローチャート。
【発明を実施するための形態】
【0035】
以下、本発明にかかる車両ドライバの特定装置及び車両ドライバの特定方法を具体化した第1の実施の形態について図1〜図9を参照して説明する。なお、本実施の形態の車両ドライバの特定装置及び車両ドライバの特定方法は、例えば複数のユーザに共有される車両に適用されるものである。
【0036】
図1に示すように、本実施の形態の車両ドライバの特定装置及び車両ドライバの特定方法が適用される車両100には、同車両100に設けられた各種運転操作要素の操作態様を検出する運転操作検出手段110が設けられている。
【0037】
運転操作検出手段110は、例えば、アクセルセンサ111、ブレーキセンサ112、ウィンカスイッチ113、及び操舵角センサ114等を備えている。運転操作検出手段110は、各センサ等111〜114の検出結果を、同検出結果に基づき各種車載機器を制御する車載制御装置140に出力する。
【0038】
アクセルセンサ111は、車両100のドライバによるアクセルペダルの踏み込み量を検出し、この検出した結果を車載制御装置140に出力する。ブレーキセンサ112は、車両100のドライバによるブレーキペダルの踏込み量を検出し、この検出した結果を車載制御装置140に出力する。ウィンカスイッチ113は、車両100のターンランプ、すなわち方向指示器の使用状態を検出し、その検出結果を車載制御装置140に出力する。また、操舵角センサ114は、車両100のドライバにより操作されるステアリングの操作角度を検出し、その検出結果を車載制御装置140に出力する。
【0039】
また、車両100には、衛星信号を受信し、この受信した衛星信号をもとに車両100の絶対位置、すなわち緯度経度を検出するGPS120が設けられている。GPS120は、車両100の移動に伴って変化する車両100の緯度経度、換言すれば、車両100が走行した各地点の緯度経度を適宜検出し、その検出結果を示す緯度経度データを車載制御装置140に出力する。
【0040】
また一方、車両100には、動的に変動する車両100の走行環境を検出する走行環境検出部130が設けられている。走行環境検出部130は、例えば、ミリ波帯の電波を用いて車両100の進行方向前方を走行する前方車両の存在を検知するミリ波レーダー131、車両100の周辺の状況を撮像する車載カメラ132を備えて構成されている。また、走行環境検出部130は、例えば、車両100の周辺を走行する車両との車車間通信や路上に設けられた路側通信機との路車間通信を行う車載通信機133を備えて構成されている。
【0041】
ミリ波レーダー131は、車両100の進行方向前方を走行する前方車両の存在を検知すると、その検知結果を示す信号を車載制御装置140に出力する。車載カメラ132は、撮像した車両100の周辺を示す画像データを車載制御装置140に適宜出力する。車載通信機133は、例えば、車車間通信を通じて車両100の進行方向前方を走行する前方車両との通信が成立すると、その通信結果を車載制御装置140に出力する。また、車載通信機133は、路車間通信を通じて、車両100の周辺を走行する他車両、特に前方車両の存在や道路上に存在する交通要素の存在を示す情報、及び渋滞情報等の各種情報を取得する。そして、車載通信機133は、この取得した各種情報を車載制御装置140に出力する。
【0042】
このように、本実施の形態の車載制御装置140には、運転操作検出手段110により検出される各種運転操作要素の操作態様を示すデータと車両100の緯度経度を示す緯度経度データとが適宜入力される。また、併せて、本実施の形態の車載制御装置140には、走行環境検出部130により検出された車両100の周辺環境を示す情報が適宜入力される。
【0043】
車載制御装置140は、運転操作検出手段110から入力される各センサ等111〜114の検出結果、すなわち、ドライバによる各種運転操作要素の操作態様を示すデータに基づき、エンジン、ブレーキ、ターンランプ、及びステアリング等の各種車載機器を制御するシステム制御部141を備えている。また、本実施の形態の車載制御装置140は、走行環境検出部130から入力される各信号や画像データに基づき、車両100の進行方向前方を走行する前方車両を車両100の走行環境の中から識別する前方車両識別部142を備えている。また一方、車載制御装置140は、運転操作検出手段110及びGPS120から入力されたデータを前方車両識別部142の識別結果とともにデータベース150に登録するデータベース化処理部143を備えている。また一方、本実施の形態の車載制御装置140は、車両100のドライバを特定する処理を行うドライバ特定処理部144を備えている。
【0044】
このうち、システム制御部141は、運転操作検出手段110から各運転操作要素の検出結果が入力されると、その検出結果に基づいて各種車載機器を制御する。これにより、例えば、ドライバによりアクセルペダルが踏み込まれたことによってアクセルセンサ111の検出結果が変化すると、この検出結果に応じてエンジンの制御量が算出され、この算出結果に応じてエンジンが制御される。
【0045】
また、本実施の形態の前方車両識別部142は、ミリ波レーダー131から車両100の前方車両の存在を示す信号が入力されると、この信号に基づいて車両100の前方に前方車両が存在している旨認識する。また、前方車両識別部142は、車載カメラ132から画像データが入力されると、この画像データの解析を通じて、同画像データに前方車両の存在を示すデータが含まれているか否かを識別する。さらに、前方車両識別部142は、車載通信機133から前方車両との通信が成立した旨を示す信号が入力されると、この信号に基づいて前方車両が存在している旨認識する。また、前方車両識別部142は、車載通信機133から路車間通信から各種情報が入力されると、この情報に基づいて前方車両が存在するか否かを識別する。なお、前方車両識別部142は、例えば、路車間通信を通じて得られた渋滞情報に基づき、車両100が走行するエリアが渋滞中にある旨認識すると、車両100の進行方向前方にも前方車両が存在している旨認識する。前方車両識別部142は、こうして前方車両の存在の有無を識別すると、その識別結果を、データベース化処理部143に出力する。
【0046】
データベース化処理部143は、運転操作検出手段110から各運転操作要素の検出結果が入力されると、この検出結果を示すデータに、GPS120から入力された緯度経度データと前方車両識別部142から入力された識別結果とを関連付ける。また、データベース化処理部143は、それら関連付けたデータを、緯度経度データによって示される地点の別にデータベース150に登録する。なお、データベース化処理部143は、例えば、ドライバが同一であるために運転操作要素の操作態様の特徴量が共通するデータについては、同一のドライバの運転操作に基づくデータとして運転支援部160に登録する。また、データベース化処理部143は、ドライバが相違するために特徴量の相違するデータについては、各別のドライバの運転操作に基づくデータとして運転支援部160に登録する。これにより、運転支援部160には、複数のドライバによる運転操作要素の操作態様を示すデータが、例えばドライバD1〜Dn等といった態様で便宜的に割り振られるドライバの別に適宜登録されることとなる。
【0047】
本実施の形態のドライバ特定処理部144は、運転操作検出手段110及びGPS120から各運転操作要素の検出結果及び車両100の緯度経度データが入力されると、前方車両識別部142から入力された識別結果を参照する。すなわち、各運転操作要素の検出結果及び車両100の緯度経度データが入力されると、ドライバ特定処理部144は、ドライバに運転操作される車両100の進行方向前方に前方車両が存在するか否かを識別する。
【0048】
そして、ドライバ特定処理部144は、前方車両が存在するとき、データベース150に既に登録されている過去の各運転操作要素の操作態様を示すデータ及び該当する緯度経度データのうちで前方車両が存在するときに取得されたデータを参照する。次いで、ドライバ特定処理部144は、ドライバが所定の地点で前方車両の存在する状況下で行っている運転操作要素の操作態様と、同地点と共通もしくは類似する地点において前方車両が存在するときに取得された過去の各運転操作要素の操作態様を示すデータとを照合する。そして、この照合の結果、車両100を運転操作しているドライバの運転操作態様の操作態様の特徴量が、上記割り振られたドライバD1〜Dnのうちのいずれのドライバの運転操作態様の特徴量に近似するかが特定される。その後、この特定結果に基づき、車両100を運転操作しているドライバが上記割り振られたドライバD1〜Dnのうちのいずれのドライバであるかが特定される。
【0049】
一方、ドライバ特定処理部144は、前方車両が存在しないとき、データベース150に既に登録されている過去の各運転操作要素の操作態様を示すデータ及び該当する緯度経度データのうちで前方車両が存在しないときに取得されたデータを参照する。次いで、ドライバ特定処理部144は、この参照するデータが示す所定の地点での運転操作態様の操作態様と、車両100を運転操作するドライバが行っている運転操作要素の操作態様とに基づいて、車両100を運転操作しているドライバを特定する。
【0050】
こうして、ドライバ特定処理部144は、ドライバが運転操作している車両100の進行方向前方を走行する前方車両の有無に応じて特定対象とするドライバを特定すると、この特定結果を、同特定結果に基づき各種運転支援を行う運転支援部160に出力する。
【0051】
一方、データベース150には、ドライバによる運転操作によって各運転操作要素が運転操作される都度、各運転操作要素の操作態様を示すデータが車両100の走行した地点を示す緯度経度データとともに登録される。
【0052】
なお、本実施の形態のデータベース化処理部143は、図2及び図3に示すように、アクセルペダル、ターンランプ、ブレーキペダル、及びステアリング等の運転操作要素の操作内容を示すデータと、各運転操作要素が操作されたときの車両100の走行地点である緯度経度を示す緯度経度データとを、交通要素の別にデータベース150に登録する。また、本実施の形態では、図2と図3とにそれぞれ例示すように、データベース150には、前方車両が存在しないときに取得されたデータと前方車両が存在するときに取得されたデータとが、前方車両の有無を識別可能な態様でデータベース150に登録される。
【0053】
また、本実施の形態のデータベース化処理部143は、図1に示すように、例えば、車両100のイグニッションキーがオンとされてからオフとされるまでの間に取得される運転操作要素の操作態様を示すデータと緯度経度データとを、一つの運転履歴、すなわち、同一のドライバの運転履歴としてデータベース150に登録する。これにより、データベース150には、地点毎に行われる運転操作要素の操作態様を示すデータがドライバ毎に登録されることとなる。なお、本実施の形態のデータベース150には、例えば、運転操作要素の操作態様を示すデータに、ドライバ毎のシートポジションやドアミラーの位置などを示すデータが関連付けられて登録されている。
【0054】
運転支援部160は、ドライバ特定処理部144からドライバの特定結果が入力されると、特定されたドライバのシートポジションやドアミラーの位置などを示すデータをデータベース150から抽出する。そして、運転支援部160は、この抽出したデータにて示される位置にシートポジションやドアミラーの位置を調整する。これにより、シートポジションやドアミラーが車両100のドライバ固有の癖に応じて自動的に調整される。また、運転支援部160は、ドライバ特定処理部144からドライバの特定結果が入力されると、この特定されたドライバの運転操作要素の操作態様、換言すれば、同ドライバの運転操作パターンを識別する。そして、運転支援部160は、この識別したドライバの運転操作パターンに応じた運転支援を、音声案内や画像案内、半自動運転等を通じて実行する。この運転支援としては、例えば、特定されたドライバが、交差点やカーブなどの減速を要する地点においてアクセルペダルをオフとするタイミングが遅く、ブレーキペダルの踏込み量が過剰である傾向にあるとき、通常よりも早いタイミングでのアクセルペダルのオフやブレーキペダルのオンを促す運転支援が行われる。また、例えば、車両100の減速時にブレーキペダルの適正な踏込み量を案内する運転支援や、車両100の発進時にアクセルペダルの適正な踏込み量を案内する運転支援が行われる。逆に、特定されたドライバが車両挙動の少ない安定した運転操作や省燃費な運転を行う傾向にあると識別できたとき、運転支援部160は、同ドライバに対する運転支援を行わない。これにより、各々特定されるドライバ固有の癖や運転技量に応じた運転支援が自動的に行われることとなる。
【0055】
次に、本実施の形態の車両ドライバの特定装置及び車両ドライバの特定方法によるドライバの特定原理について図4〜図7を参照して説明する。
図4(a)に示すように、道路上を走行する車両100が交差点SC及びカーブCaの連続する道路を進行していたとする。
【0056】
ここで、車両100の走行速度の推移例を同図4(a)に示すように、減速を要するカーブCaを包含した区間L1を走行する車両100の進行方向前方に前方車両が存在しないときには、車両100のドライバは、カーブCaの線形や道路幅に従って減速を行う。すなわち、車両100のドライバによる運転操作要素の操作態様には、道路上に存在するカーブCaといった交通要素以外の要素に起因する操作態様の変動、すなわち外乱が含まれないものとなっている。そして、車両100が区間L1を走行する際には、進行方向前方に前方車両が存在しない限り、毎回、共通もしくは近似する運転操作が行われる。この結果、車両100の走行速度の推移は、毎回共通もしくは近似するものとなる。
【0057】
これに対し、図4(b)や図4(c)に示すように、たとえ同一のドライバであっても、同ドライバが運転操作する車両100の進行方向前方に前方車両200が存在するときには、例えば前方車両200との車間距離を維持すべく、前方車両200の減速に応じた急な減速操作や段階的な減速操作が行われる。このように、車両100の進行方向前方に前方車両200が存在するときには、車両100の走行態様が、道路上に固有の交通要素であるカーブCaとは異なる要素、すなわち外乱を含んだものなっている。
【0058】
また、図5(a)に示すように、道路上を走行する車両100が交差点SC1に向かって走行しており、この車両100が交差点SC1を左折しようとしていたとする。
この際、図5(b)に示すように、車両100のドライバにより、例えば、車両100が交差点SC1の手前の地点Paに到達するタイミングtaにおいて、アクセルペダルをオンからオフとする操作が行われる。次いで、地点Paを通過した車両100が地点Pbに到達するタイミングtbにおいて、車両100が左折する旨を示すべく例えば進行方向左側のターンランプがオンとされる。そして、地点Pbを通過した車両100が地点Pcに到達するタイミングtcにおいて、車両100を減速すべくブレーキペダルが踏み込まれる。
【0059】
また、図5(c)に示すように、同一のドライバにより操作される車両100が交差点SC1と同一、もしくはこの交差点SC1に道路幅や交差点形状、車線数などが類似する交差点SC2に向かって走行しており、この車両100が交差点SC1(SC2)を左折しようとしていたとする。なお、図5(c)の例では、車両100の進行方向前方に前方車両200が存在している。
【0060】
この際にも、図5(d)に示すように、例えば、車両100が地点Pd、Pe、Pfに到達する各タイミングtd、te、tfにおいて、アクセルペダルのオフ、ターンランプのオン、ブレーキペダルのオンといった操作が順次行われる。
【0061】
しかし、このとき、交差点SC1(SC2)の手前でアクセルペダルのオフ、ターンランプのオン、ブレーキペダルの各操作が行われる各地点Pd、Pe、Pfから交差点SC1(SC2)までの距離はそれぞれ、図5(a)及び(b)に例示した交差点SC1から各地点Pa、Pb、Pcまでの距離とは相違するものとなっている。
【0062】
すなわち、交差点SC1や同交差点SC1に道路幅や交差点形状等が同一もしくは類似する交差点SC2を包含する道路を同一のドライバの運転操作する車両100が走行したとしても、前方車両200が存在するときには、車両100が交差点SC1(SC2)を走行する際の走行態様は相違するようになる。
【0063】
よって、図6(a)に例示するように、前方車両200が存在しないときと前方車両200が存在するときとでは、同一のドライバにより同一の交差点SC1の手前で行われるアクセルペダル、ターンランプ、及びブレーキペダルの操作態様は各々相違するものとなっている。
【0064】
なお、図6(b)に例示するように、例えば、前方車両200が存在しないときにおいて、交差点SC1と同交差点SC1に類似する交差点SC2の手前で同一のドライバにより行われるアクセルペダル、ターンランプ、及びブレーキペダルの操作態様は各々類似するものとなっている。また、図示は省略するが、前方車両200が存在するときにおいても、類似する交差点SC1及びSC2の手前で同一のドライバにより行われるアクセルペダル、ターンランプ、及びブレーキペダルの操作態様は各々類似するものとなる。よって、本実施の形態では、こうした運転操作の特性に鑑み、共通の地点で取得された運転操作要素の操作態様を示すデータがデータベース150に存在しないときには、道路線形や道路幅、車線数等が類似する地点のもとで取得されたデータに基づいてドライバの特定が行われる。
【0065】
また、図7(a)に例示するように、前方車両200が存在しないときにおいて、交差点SC1の手前を異なるドライバD1及びD2がアクセルペダル、ターンランプ、及びブレーキペダルのそれぞれの運転操作要素を操作する地点、並びに各運転操作要素の操作回数は相違するものとなっている。同様に、図7(b)に例示するように、前方車両200が存在するときにおいても、交差点SC1の手前を異なるドライバD1及びD2がアクセルペダル、ターンランプ、及びブレーキペダルのそれぞれの運転操作要素を操作する地点、並びに各運転操作要素の操作回数は相違するものとなっている。すなわち、同一の地点、同一の走行環境下を車両100が走行したとしても、そのドライバが相違するときには、ドライバD1及びD2に固有の癖が反映されることにより各運転操作要素の操作態様の特徴量は相違するものとなる。
【0066】
そこで、本実施の形態では、こうした特性に鑑み、特定対象とするドライバが運転操作する車両100の進行方向前方に前方車両200が存在するか否かを識別した上で、運転操作検出手段110、GPS120、及び走行環境検出部130を通じて取得されたデータを用いてドライバが特定される。
【0067】
以下、本実施の形態の車両ドライバの特定装置及び車両ドライバの特定方法の作用を図8及び図9を参照して説明する。
図8に示すように、データベース150の作成時には、まずステップS100において、車両100の走行時においてドライバにより運転操作が行われた旨が検出されると、運転操作された運転操作要素の操作態様を示す運転操作データが取得される(ステップS101)。ここでは、例えば、アクセルペダル、ターンランプ、及びブレーキペダルといった各運転操作要素をオン/オフとする操作を示すデータが、上記アクセルセンサ111、ウィンカスイッチ113、及びブレーキセンサ112により取得される。そして、各運転操作要素の検出結果を示すデータである運転操作データが各々取得される。
【0068】
次いで、それら各運転操作要素が操作されたときの車両100の緯度経度を示す緯度経度データがGPS120により取得され(ステップS102)、この取得された緯度経度データが上記取得された運転操作データの別に関連付けられる(ステップS103)。これにより、例えば、アクセルペダル、ターンランプ、及びブレーキペダルといった各運転操作要素の操作態様を示す各運転操作データに、各運転操作要素が操作されたときの車両100の緯度経度を示す緯度経度データが各々関連付けられる。
【0069】
その後、走行環境検出部130の検出結果をもとに、車両100の進行方向前方に前方車両200が存在するか否かが検知される(ステップS104)。次いで、前方車両200が存在するとき(ステップS105:YES)、運転操作データ及び緯度経度データが前方車両200の存在するときに取得された旨を示すフラグがそれら運転操作データ及び緯度経度データに付与される(ステップS106)。そして、それらフラグの付与された運転操作データ及び緯度経度データがデータベース150に登録される。
【0070】
一方、前方車両200が存在しないとき(ステップS105:NO)、運転操作データ及び緯度経度データが前方車両200の存在しないときに取得された旨を示すフラグがそれら運転操作データ及び緯度経度データに付与される(ステップS107)。そして、それらフラグの付与された運転操作データ及び緯度経度データがデータベース150に登録される。
【0071】
こうして、データベース150には、道路上を走行する車両100のドライバにより運転操作が行われる都度、運転操作データ及び緯度経度データが取得される。そして、それら運転操作データ及び緯度経度データが関連付けされたデータが前方車両の存在の有無を示すフラグの付与された状態でデータベース150に登録されることとなる。こうして、車両100が走行する都度、車両100に搭載されたデータベース150が拡充されることとなる。
【0072】
次に、図9に示すように、ドライバの特定に際してはまず、ステップS200において、ドライバが運転操作する車両100が走行している地点と緯度経度が共通の緯度経度データがデータベース150に登録されているか否かが判断される。そして、車両100が走行している地点と緯度経度が同一の緯度経度データがデータベース150に既に登録されているとき、ドライバによる各運転操作要素の操作態様が上記運転操作検出手段110により検出される。また、上記同一の緯度経度データがデータベース150に存在しないときであっても、車両100の走行する地点と道路線形、道路勾配、及び交差点形状の少なくとも1つが類似する地点で取得された運転操作データ及び緯度経度データがデータベース150に存在するときには(ステップS207:YES)、ドライバによる各運転操作要素の操作態様が上記運転操作検出手段110により検出される。
【0073】
次いで、車両100の進行方向前方に前方車両200が存在するか否かが識別される(ステップS202)。そして、前方車両200が存在するときには、データベース150に登録済みのデータのうち、車両100が走行中と共通もしくは類似する地点で取得され、かつ前方車両200の存在するとき取得された1乃至複数の運転操作データがデータベース150から抽出される(ステップS203)。そして、この抽出された運転操作データが示す各運転操作要素の特徴量とステップS201で検出されたドライバによる各運転操作要素の操作態様の特徴量とが照合される(ステップS204)。
【0074】
また、ドライバが運転操作する車両100の進行方向前方に前方車両200が存在しないときには(ステップS202:NO)、データベース150に登録済みのデータのうち、車両100が走行中と共通もしくは類似する地点で取得され、かつ前方車両200の存在しないときに取得された1乃至複数の運転操作データがデータベース150から抽出される(ステップS208)。そして、この抽出された運転操作データが示す各運転操作要素の特徴量とステップS201で検出されたドライバによる各運転操作要素の操作態様の特徴量とが照合される(ステップS204)。
【0075】
次いで、こうした照合の結果、特徴量が共通もしくは類似するデータがデータベース150に存在するときには(ステップS205:YES)、車両100を運転操作しているドライバが、例えばドライバD1としてデータベース150に登録されているドライバであると特定される(ステップS206)。
【0076】
こうして、ドライバが特定されると、例えば、ドライバD1に特有のデータとしてデータベース150に登録されているシートポジションやドアミラーの位置などを示すデータに基づいてシートポジションやドアミラーの位置調整が行われる。また、例えば、特定されたドライバ固有の走行パターンに応じた運転支援が行われる。
【0077】
一方、特徴量の照合の結果、特徴量が共通もしくは類似するデータがデータベース150に存在しないときには(ステップS205:NO)、ドライバが特定されることなく本処理が終了される。そして、車両100の移動に伴って同車両100の走行する地点が変化すると、この地点で行われた各運転操作要素の操作態様の特徴量と、データベース150に登録済みの運転操作データの特徴量とが照合される。こうして、ドライバが特定されるまで本処理が実行されることとなるとともに、ドライバが特定されるまでの間、例えば標準のドライバ向けの運転支援が行われる。同様に、ステップS206において、ドライバを特定できなかったときにも、例えば標準のドライバ向けの運転支援が行われることとなる。
【0078】
以上説明したように、本実施の形態にかかる車両ドライバの特定装置及び車両ドライバの特定方法によれば、以下の効果が得られるようになる。
(1)ドライバによる運転操作の特徴量を示すデータを当該運転操作の行われた走行環境の別にデータベース150に登録し、このデータベース150に登録したデータのうち特定対象とするドライバの運転する車両と走行環境が共通もしくは類似するデータを用いてドライバを特定した。このため、特定対象とするドライバの運転する車両の走行環境が変化したとしても、この走行環境に対応するデータを用いてドライバを特定することが可能となる。そのため、ドライバの運転操作の特徴量を変化させ得る走行環境が変化したとしても、その影響を受けることなく、ドライバを特定することが可能となる。これにより、運転操作の特徴量に基づくドライバの特定をより高精度に行うことが可能となる。
【0079】
(2)ドライバによる運転操作の特徴量を示す運転操作データを、当該運転操作される車両100の進行方向前方を走行する前方車両200の有無の別に登録した。そして、特定対象とするドライバの運転する車両100の進行方向前方を走行する前方車両200の有無を当該車両100の走行環境として識別し、この識別した前方車両の有無状況の共通するデータをドライバの特定に用いることとした。このため、ドライバの特定に用いる運転操作要素の操作態様の特徴量が前方車両200の存在に起因して変化したとしても、この変化した特徴量に基づき行われるドライバの特定にかかる精度を維持することが可能となる。すなわち、前方車両200の存在に起因して上記特徴量が変化しても、特徴量が変化したために特定対象とするドライバが他のドライバとして特定されることが抑制される。
【0080】
(3)ドライバの運転操作を示す運転操作データを、車両100の走行する地点の別にデータベース150に登録した。そして、データベース150に登録された運転操作データのうち、運転操作の行われた地点及び走行環境が共に共通もしくは類似するデータを用いて特定対象とするドライバを特定することとした。このため、データベース150に登録された運転操作データ及び緯度経度データが取得された状況と走行環境が共通もしくは類似し、かつ、車両100の走行する地点が共通する状況下で行われた運転操作に基づいてドライバを特定することが可能となる。これにより、複数人のドライバの各地点における運転操作を示す運転操作データをデータベース150に登録しつつも、車両の操作環境が極めて近似する状況下で行われた運転操作の特徴量に基づいてドライバを特定することが可能となり、ドライバの特定精度が好適に高められるようになる。
【0081】
(4)上記地点として、道路線形、道路勾配、及び交差点形状の少なくとも1つが共通もしくは類似する地点を選定した。そして、特定対象とするドライバの運転操作する車両100が走行した地点と緯度経度が共通する地点で得られた運転操作データや緯度経度データがデータベース150に存在するとき、それら各データを用いてドライバを特定した。また、特定対象とするドライバの運転操作する車両100が走行した地点と緯度経度が共通する地点で得られた運転操作データや緯度経度データがデータベース150に存在しないとき、特定対象とするドライバの運転操作する車両100が走行した地点と道路線形、道路勾配、及び交差点形状の少なくとも1つが類似する地点で取得された運転操作データや緯度経度データを用いてドライバを特定した。このため、走行環境と併せて地点を加味したドライバの特定を行いつつも、類似する地点で取得されたデータさえデータベース150に存在すれば、ドライバを特定することが可能となる。これにより、データベース150に登録されたデータを用いてドライバを特定する上で、特定に用いるデータの選定範囲が拡充され、ひいては、ドライバを特定可能な機会が増大することとなる。
【0082】
(5)ドライバによる運転操作の特徴量として、特定の交通要素のもとで行われる複数種の運転操作要素の操作態様を選定した。また、上記地点として、特定の交通要素のもとで行われる複数種の運転操作要素による一連の運転操作が行われる連続した地点を選定した。これにより、特定の交通要素のもとで行われる一連の運転操作のパターンに基づいてドライバを特定することが可能となり、ドライバの特定精度の一層の向上が図られるようになる。
【0083】
(6)運転操作要素として、アクセルペダル、ターンランプ、及びブレーキペダルの少なくとも2つの要素を選定した。このため、一連の地点のもとで行われるアクセルペダル、ターンランプ、及びブレーキペダルといった通常の運転操作において利用されやすくドライバ固有の癖が反映されやすい要素に基づいてドライバを特定することが可能となる。これにより、ドライバの特定をより多くの地点における運転操作の特徴量に基づき行うことが可能になるとともに、その特定精度の一層の向上が図れるようになる。
【0084】
なお、上記実施の形態は、以下のような形態をもって実施することもできる。
・走行環境検出部130を、ミリ波レーダー131、車載カメラ132、及び車載通信機133によって構成した。これに限らず、ミリ波レーダー131、車載カメラ132、及び車載通信機133の少なくとも1つによって走行環境検出部130を構成してもよい。この他、車両100の周辺に存在する前方車両200や人物等の存在を検出可能なものであれば運転操作検出手段として採用することが可能である。
【0085】
・該当する地点の運転操作データが存在しないとき、道路線形、道路勾配、及び交差点形状の少なくとも1つが類似する地点で取得された運転操作データを用いてドライバの特定を行った。これに限らず、特定対象とするドライバの運転操作する車両100の走行する地点に道路線形、道路勾配、及び交差点形状の全てが類似する地点で取得された運転操作データ等を用いてドライバの特定を行うようにしてもよい。また併せて、道路線形、道路勾配、及び交差点形状の少なくとも1つが類似し、かつ、運転操作の特徴量を示すデータが取得されたときの路面状態、時間帯、及び車両100周辺の天候が、車両100の走行時における路面状態、時間帯、及び車両100周辺の天候と類似しているとき、それら各要素が類似する地点で取得された運転操作データ等を用いてドライバの特定を行うようにしてもよい。また、該当する地点の運転操作データが存在しないとき、車両100の走行時における路面状態、時間帯、及び天候の少なくとも1つが類似する地点で取得された運転操作データ等を用いてドライバの特定を行うようにしてもよい。この他、ドライバの特定に用いる運転操作データとは、同地点におけるドライバに固有の運転操作のパターンが反映される地点で取得されたデータであればよく、適宜選択することが可能である。なお、これらの場合には、路面状態、時間帯、及び車両100周辺の天候等が、動的に変動する車両100の走行環境となる。
【0086】
・該当する地点と共通もしくは類似する地点におけるドライバの運転操作の特徴量を示す運転操作データがデータベース150に存在しないとき(図9 ステップS207:NO)、その他の地点で取得された運転操作データ等を用いてドライバの特定を行った。これに限らず、該当する地点と共通もしくは類似する地点におけるドライバの運転操作の特徴量を示す運転操作データがデータベース150に存在しないときには、特定対象とするドライバの特定に併せて当該ドライバによる運転操作の特徴量を示すデータをデータベース150に新規登録するようにしてもよい。
【0087】
・データベース150に登録済みの運転操作データ等を用いてドライバを特定できなかったとき、標準のドライバ向けの運転支援を行うこととした。これに限らず、ドライバを特定できなかったときには、運転支援を行わないようにしてもよい。
【0088】
・上記実施の形態では、ドライバを特定するとともに、特定したドライバの運転操作パターンに応じた運転支援を実行した。これに限らず、例えば、車両100に搭載される車載情報端末等で利用可能なアプリケーションやコンテンツデータが課金制であるとき、課金したドライバ、すなわち正当な利用権限を有するドライバを、同ドライバの運転操作の特徴量に基づいて特定するようにしてもよい。この場合には、ドライバが車両100の利用中にアプリケーションやコンテンツデータに課金したとき、同ドライバがアプリケーションやコンテンツデータに課金した旨を示すデータが、同ドライバの運転操作の特徴量を示すデータに関連付けられてデータベース150に登録される。そして、ドライバの運転操作の特徴量に基づき同ドライバが特定されると、同ドライバがアプリケーションやコンテンツデータの利用権限を有するか否かが併せて特定されることとなる。またこの他、例えば、データベース化が完了したデータベース150に登録済みのデータに基づいてドライバを特定するときができないときには、この特定できないドライバが車両100の不正利用者であると特定するようにしてもよい。そして、正規のドライバに車両100が不正利用されている旨を報知したり、不正利用者であると特定されたドライバに対して警告を促すようにしてもよい。またこの他、例えば、ドライバの自宅等の拠点やドライバの利用頻度の高い訪問地点に関するデータをドライバの運転操作の特徴量を示すデータに関連付けて、それら各データをデータベース150に登録するようにしてもよい。この場合には、運転操作の特徴量に基づきドライバが特定されると、同特定されたドライバの特徴量を示すデータに関連付けられている拠点や利用頻度の高い訪問地点が特定される。そして、例えば、この特定された拠点や訪問地点が経路案内に際しての目的地の候補として提示されることとなる。このため、ドライバが車両100を運転操作する過程で同ドライバの拠点や利用頻度の高い訪問地点が自動的に特定され、それら特定された拠点や訪問地点をドライバ毎に提示することが可能となる。これにより、拠点や訪問地点が異なる複数のドライバが車両100を利用するようなときにも、ドライバ毎に拠点や訪問地点を提示したり、それら拠点や訪問地点までの経路案内を行ったりすることが可能となる。
【0089】
・運転操作要素として、アクセルペダル、ターンランプ、及びブレーキペダルの少なくとも2つの要素を選定した。これに限らず、運転操作要素としては、アクセルペダル、ターンランプ、及びブレーキペダルのうち一つの要素であってもよい。またこの他、ドライバの特定に用いられる運転操作要素としては、道路上の各地点の特性に応じて操作される要素であればよく、例えば、ステアリング、エンジンブレーキ、手動変速機等の少なくとも1つであってもよい。
【0090】
・運転操作の特徴量として、特定の交通要素のもとで行われる複数種の運転操作要素の操作態様を選定した。これに限らず、運転操作の特徴量としては、例えば、特定の交通要素のもとで行われるアクセルペダルのみの操作態様といったように、一種の運転操作要素の操作態様を選定するようにしてもよい。また、ドライバの特定に用いられる地点とは、同地点の特性に応じて運転操作要素の操作量や操作タイミングなどの運転操作の特徴量が変化する地点であればよく、交差点やカーブ等の特定の交通要素が存在しない地点であってもよい。
【0091】
・上記地点として、複数種の運転操作要素による一連の運転操作が行われる連続した地点を選定した。これに限らず、上記地点としては、複数種の運転操作要素による一連の運転操作が行われる連続した地点のうちの一つの地点であってもよい。この場合には、例えば、図5(a)及び(b)に示した例では、交差点SC1の手前の連続した地点Pa〜Pcのうち、地点Paで行われた運転操作のみや、地点Pbで行われた運転操作のみに基づいてドライバが特定されることとなる。またこの他、ドライバの特定に用いる運転操作データとは、ドライバによる運転操作を通じて取得された運転操作データのうち、走行環境が共通もしくは類似する状況下で取得されたデータであればよい。
【0092】
・車両100の走行環境として前方車両200の有無を識別し、この識別結果に応じた運転操作データをドライバの特定に際して用いることとした。これに限らず、車両100の走行環境として例えば渋滞の有無を識別し、渋滞の有無の別にドライバによる運転操作の特徴量を示す運転操作データをデータベース150に登録するようにしてもよい。そして、ドライバの特定に際しては、同ドライバが運転操作する車両100の走行するエリアが渋滞中であるかを識別し、この識別結果に応じて、渋滞時に取得された運転操作データと非渋滞時に取得された運転操作データとを使い分けるようにしてもよい。これによれば、ドライバによる運転操作が渋滞時と非渋滞時とで相違し、それぞれにドライバ固有の癖が反映される傾向にあったとしても、渋滞状況を加味してドライバを特定することが可能となる。また、例えば、車両100の走行環境として例えば道路付近に存在する人や障害物の有無を識別し、人や障害物の有無の別にドライバによる運転操作の特徴量を示す運転操作データをデータベース150に登録するようにしてもよい。そして、ドライバの特定に際しては、同ドライバが運転操作する車両100の走行する道路付近に人や障害物が存在するかを識別し、この識別結果に応じて、人や障害物が存在するときに取得された運転操作データと人や障害物が存在しないときに取得された運転操作データとを使い分けるようにしてもよい。これによれば、人や障害物の存在に起因してドライバによる運転操作が変化し、この変化する運転操作にドライバ固有の癖が反映される傾向にあったとしても、人や障害物の存在を加味してドライバを特定することが可能となる。この他、ドライバの特定、及び運転操作の登録時に識別する走行環境とは、ドライバの運転操作を変化させ得る動的に変動する環境であればよく、適宜変更することが可能である。
【0093】
・上記各実施の形態では、データベース化処理部143、ドライバ特定処理部144、及びデータベース150を車両100に搭載した。これに限らず、データベース化処理部143、ドライバ特定処理部144、及びデータベース150を、ドライバの運転操作の特徴量を示すデータが集約される管理センターに設ける構成としてもよい。この構成では、この管理センターと車両100との間での通信を通じて、車両100のドライバによる運転操作の特徴量と運転操作の行われた地点とを示すデータが車両100から管理センターに送信される。そして、管理センターでは、車両100から送信されたデータとデータベース150に登録されているデータとに基づいて、車両100のドライバが特定される。これにより、車載制御装置140の構成の簡略化が図られるようになる。また、これにより、ドライバの特定に必要なデータを管理センターで一括管理することが可能になるとともに、ドライバの特定に必要な処理を管理センターで一括して行うことが可能となる。
【符号の説明】
【0094】
100…車両、110…運転操作検出手段、111…アクセルセンサ、112…ブレーキセンサ、113…ウィンカスイッチ、114…操舵角センサ、120…GPS、130…走行環境検出部、131…ミリ波レーダー、132…車載カメラ、133…車載通信機、140…車載制御装置、141…システム制御部、142…前方車両識別部、143…データベース化処理部、144…ドライバ特定処理部、150…データベース、160…運転支援部、200…前方車両、Ca…カーブ、SC、SC1…交差点、SC2…SC1に類似する交差点。
【特許請求の範囲】
【請求項1】
車両を運転操作するドライバの運転操作態様に基づいてドライバの特定を行う車両ドライバの特定装置であって、
ドライバによる運転操作の特徴量を示すデータが当該運転操作の行われた地点において動的に変動する走行環境の別に登録されるデータベースと、
前記データベースに登録されたデータのうち、特定対象とするドライバの運転する車両と走行環境が共通もしくは類似するデータを用いてドライバを特定する処理を行うドライバ特定処理部と、を備える
ことを特徴とする車両ドライバの特定装置。
【請求項2】
ドライバによる運転操作の特徴量を示すデータが登録される前記走行環境の別が、当該運転操作される車両の進行方向前方を走行する前方車両の有無であり、
前記ドライバ特定処理部は、前記特定対象とするドライバの運転する車両と走行環境が共通もしくは類似するデータとして、当該車両の進行方向前方を走行する前方車両の有無の共通するデータを用いてドライバを特定する処理を行う
請求項1に記載の車両ドライバの特定装置。
【請求項3】
前記データベースには、前記走行環境の別に登録されるドライバによる運転操作の特徴量を示すデータがドライバによる運転操作の行われた地点毎に登録されるものであり、
前記ドライバ特定処理部は、前記データベースに登録されたデータのうち、運転操作の行われた地点及び走行環境が共に共通もしくは類似するデータを用いて特定対象とするドライバを特定する処理を行う
請求項1または2に記載の車両ドライバの特定装置。
【請求項4】
前記地点とは、道路線形、道路勾配、及び交差点形状の少なくとも1つが共通もしくは類似する地点である
請求項3に記載の車両ドライバの特定装置。
【請求項5】
前記運転操作の特徴量が、特定の交通要素のもとで行われる複数種の運転操作要素の操作態様であり、
前記地点が、特定の交通要素のもとで行われる複数種の運転操作要素による一連の運転操作が行われる連続した地点である
請求項3または4に記載の車両ドライバの特定装置。
【請求項6】
前記運転操作要素が、アクセルペダル、ターンランプ、及びブレーキペダルの少なくとも2つの要素からなる
請求項5に記載の車両ドライバの特定装置。
【請求項7】
車両を運転操作するドライバの運転操作態様に基づいてドライバの特定を行う車両ドライバの特定方法であって、
ドライバによる運転操作の特徴量を示すデータを当該運転操作の行われた地点において動的に変動する走行環境の別にデータベースに登録するステップと、
前記データベースに登録したデータのうち、特定対象とするドライバの運転する車両と走行環境が共通もしくは類似するデータを用いてドライバを特定するステップと、を含む
ことを特徴とする車両ドライバの特定方法。
【請求項8】
前記登録するステップにおいて、ドライバによる運転操作の特徴量を示すデータを、当該運転操作される車両の進行方向前方を走行する前方車両の有無の別に前記データベースに登録し、
前記特定するステップにおいて、特定対象とするドライバの運転する車両と走行環境が共通もしくは類似するデータとして当該車両の進行方向前方を走行する前方車両の有無の共通するデータを用いて特定対象とするドライバを特定する
請求項7に記載の車両ドライバの特定方法。
【請求項9】
前記登録するステップにおいて、走行環境の別に登録されるドライバによる運転操作の特徴量を示すデータをドライバによる運転操作の行われた地点毎に登録し、
前記特定するステップにおいて、前記データベースに登録したデータのうち、運転操作の行われた地点及び走行環境が共に共通もしくは類似するデータを用いて特定対象とするドライバを特定する
請求項8に記載の車両ドライバの特定方法。
【請求項10】
前記地点として、道路線形、道路勾配、及び交差点形状の少なくとも1つが共通もしくは類似する地点を選定する
請求項9に記載の車両ドライバの特定方法。
【請求項11】
前記運転操作の特徴量が、特定の交通要素のもとで行われる複数種の運転操作要素の操作態様であり、
前記地点として、特定の交通要素のもとで行われる複数種の運転操作要素による一連の運転操作が行われる連続した地点を選定する
請求項9または10に記載の車両ドライバの特定方法。
【請求項12】
前記運転操作要素として、アクセルペダル、ターンランプ、及びブレーキペダルの少なくとも2つの要素を選定する
請求項11に記載の車両ドライバの特定方法。
【請求項1】
車両を運転操作するドライバの運転操作態様に基づいてドライバの特定を行う車両ドライバの特定装置であって、
ドライバによる運転操作の特徴量を示すデータが当該運転操作の行われた地点において動的に変動する走行環境の別に登録されるデータベースと、
前記データベースに登録されたデータのうち、特定対象とするドライバの運転する車両と走行環境が共通もしくは類似するデータを用いてドライバを特定する処理を行うドライバ特定処理部と、を備える
ことを特徴とする車両ドライバの特定装置。
【請求項2】
ドライバによる運転操作の特徴量を示すデータが登録される前記走行環境の別が、当該運転操作される車両の進行方向前方を走行する前方車両の有無であり、
前記ドライバ特定処理部は、前記特定対象とするドライバの運転する車両と走行環境が共通もしくは類似するデータとして、当該車両の進行方向前方を走行する前方車両の有無の共通するデータを用いてドライバを特定する処理を行う
請求項1に記載の車両ドライバの特定装置。
【請求項3】
前記データベースには、前記走行環境の別に登録されるドライバによる運転操作の特徴量を示すデータがドライバによる運転操作の行われた地点毎に登録されるものであり、
前記ドライバ特定処理部は、前記データベースに登録されたデータのうち、運転操作の行われた地点及び走行環境が共に共通もしくは類似するデータを用いて特定対象とするドライバを特定する処理を行う
請求項1または2に記載の車両ドライバの特定装置。
【請求項4】
前記地点とは、道路線形、道路勾配、及び交差点形状の少なくとも1つが共通もしくは類似する地点である
請求項3に記載の車両ドライバの特定装置。
【請求項5】
前記運転操作の特徴量が、特定の交通要素のもとで行われる複数種の運転操作要素の操作態様であり、
前記地点が、特定の交通要素のもとで行われる複数種の運転操作要素による一連の運転操作が行われる連続した地点である
請求項3または4に記載の車両ドライバの特定装置。
【請求項6】
前記運転操作要素が、アクセルペダル、ターンランプ、及びブレーキペダルの少なくとも2つの要素からなる
請求項5に記載の車両ドライバの特定装置。
【請求項7】
車両を運転操作するドライバの運転操作態様に基づいてドライバの特定を行う車両ドライバの特定方法であって、
ドライバによる運転操作の特徴量を示すデータを当該運転操作の行われた地点において動的に変動する走行環境の別にデータベースに登録するステップと、
前記データベースに登録したデータのうち、特定対象とするドライバの運転する車両と走行環境が共通もしくは類似するデータを用いてドライバを特定するステップと、を含む
ことを特徴とする車両ドライバの特定方法。
【請求項8】
前記登録するステップにおいて、ドライバによる運転操作の特徴量を示すデータを、当該運転操作される車両の進行方向前方を走行する前方車両の有無の別に前記データベースに登録し、
前記特定するステップにおいて、特定対象とするドライバの運転する車両と走行環境が共通もしくは類似するデータとして当該車両の進行方向前方を走行する前方車両の有無の共通するデータを用いて特定対象とするドライバを特定する
請求項7に記載の車両ドライバの特定方法。
【請求項9】
前記登録するステップにおいて、走行環境の別に登録されるドライバによる運転操作の特徴量を示すデータをドライバによる運転操作の行われた地点毎に登録し、
前記特定するステップにおいて、前記データベースに登録したデータのうち、運転操作の行われた地点及び走行環境が共に共通もしくは類似するデータを用いて特定対象とするドライバを特定する
請求項8に記載の車両ドライバの特定方法。
【請求項10】
前記地点として、道路線形、道路勾配、及び交差点形状の少なくとも1つが共通もしくは類似する地点を選定する
請求項9に記載の車両ドライバの特定方法。
【請求項11】
前記運転操作の特徴量が、特定の交通要素のもとで行われる複数種の運転操作要素の操作態様であり、
前記地点として、特定の交通要素のもとで行われる複数種の運転操作要素による一連の運転操作が行われる連続した地点を選定する
請求項9または10に記載の車両ドライバの特定方法。
【請求項12】
前記運転操作要素として、アクセルペダル、ターンランプ、及びブレーキペダルの少なくとも2つの要素を選定する
請求項11に記載の車両ドライバの特定方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2013−112324(P2013−112324A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−263359(P2011−263359)
【出願日】平成23年12月1日(2011.12.1)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年12月1日(2011.12.1)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]