
車両レーダーのアライメント方法及びシステム
【課題】車両に装着されたレーダーの水平または垂直方向へのミスアライメント発生時、これを自動で検出して使用者に警告したり、これを自動で補正できるようにする車両レーダーのアライメント方法及びシステムを提供すること。
【解決手段】車両に設置されたレーダーが前方の地面に向かって電波を放射するステップと、前記地面から反射される反射波を受信するステップと、該反射波に基づいて、前記レーダーの垂直方向へのミスアライメント可否を判断するステップとを含むことを特徴とする。
【解決手段】車両に設置されたレーダーが前方の地面に向かって電波を放射するステップと、前記地面から反射される反射波を受信するステップと、該反射波に基づいて、前記レーダーの垂直方向へのミスアライメント可否を判断するステップとを含むことを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両レーダーのアライメント方法及びシステムに関し、より詳細には、車両に装着されたレーダーの垂直または水平方向へのミスアライメント(misalignment)を自動で検出できるようにする車両レーダーのアライメント方法及びシステムに関する。
【背景技術】
【0002】
一般に、車両のアダプティブクルーズコントロールACC(Adaptive Cruise Control)システムは、車両前方に装着されたレーダーで検出される先行車両の位置及び距離を介して車両のスロットルバルブ、ブレーキ、及び変速機などを自動制御し、適切な加減速を行うことにより、先行車両と適正距離が維持されるようにするシステムである。通常、車両のアダプティブクルーズコントロールシステムでは、レーダーが車両のフロントエンドモジュールに装着されて先行車両の位置及び距離を検出するため、前記レーダーの方向性に対するアライメントと分析座標値に対するアナリシスとは、アダプティブクルーズコントロールにおいて非常に重要である。
【0003】
しかし、従来、上記のように車両に装着されるレーダーの方向性、特に、地面に対して水平または垂直方向にレーダーのミスアライメントが発生する場合、これを効果的に自動で検出して使用者に知らせることができないという問題があった。これにより、従来では、レーダーの水平または垂直方向へのミスアライメントによって先行車両などに対する誤った走行情報が提供される場合にも、それが正しいものであるか、または誤ったものであるかを使用者は確認することができず、それにより、車両走行中、安全事故の危険が増加するという問題があった。
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明は、上記のような従来技術の問題を解決するために提案されたものであって、その目的は、車両に装着されたレーダーの水平または垂直方向へのミスアライメント発生時、これを自動で検出して使用者に警告したり、これを自動で補正できるようにする車両レーダーのアライメント方法及びシステムを提供することにある。
【課題を解決するための手段】
【0005】
そこで、上記の目的を達成するための本発明に係る車両レーダーの垂直方向へのアライメント方法は、車両に設置されたレーダーが前方の地面に向かって電波を放射するステップと、前記地面から反射される反射波を受信するステップと、該反射波に基づいて、前記レーダーの垂直方向へのミスアライメント可否を判断するステップとを含むことを特徴とする。
【0006】
本発明において、前記ミスアライメント可否を判断するステップは、前記反射波の周波数スペクトルに基づいてなされることが好ましい。
【0007】
本発明において、前記ミスアライメント可否を判断するステップは、前記反射波の周波数スペクトルに基づいて、前記レーダーの垂直方向への歪み角を算出するステップと、該歪み角が予め設定されたしきい値以上になるか否かを確認するステップとを含み、前記垂直方向への歪み角は、前記反射波の周波数スペクトルによって得られる前記レーダーと前記前方の地面との間の距離によって算出されることが好ましい。
【0008】
本発明は、前記ミスアライメント可否の判断結果、ミスアライメントと判断された場合に警告するステップをさらに含むことが好ましい。
【0009】
本発明は、前記ミスアライメント可否の判断結果、ミスアライメントと判断された場合に警告し、前記レーダーを非活性化させるステップをさらに含むことが好ましい。
【0010】
本発明は、前記ミスアライメント可否の判断結果、ミスアライメントと判断された場合、前記レーダーの垂直方向への歪み角を補償するステップをさらに含むことが好ましい。前記歪み角を補償するステップは、前記レーダーの送信アンテナのアレイ因子を補償することにより、前記歪み角をソフトウェア的に補償したり、モータ駆動によって前記レーダーの歪み角を物理的に補償することでなされることが好ましい。
【0011】
また、上記の目的を達成するための本発明に係る車両レーダーの垂直方向へのアライメントシステムは、車両に設置されて前方の地面に向かって電波を放射し、その反射波を受信するレーダーと、該反射波に基づいて、前記レーダーの垂直方向へのミスアライメント可否を判断するミスアライメント判断手段とを備えることを特徴とする。
【0012】
本発明において、前記ミスアライメント判断手段は、前記反射波の周波数スペクトルに基づいて判断することが好ましい。
【0013】
本発明において、前記ミスアライメント判断手段は、前記反射波の周波数スペクトルに基づいて、前記レーダーの垂直方向への歪み角を算出し、前記歪み角を予め設定されたしきい値と比較することによって、前記レーダーの垂直方向へのミスアライメント可否を判断することが好ましい。
【0014】
本発明において、前記垂直方向への歪み角は、前記反射波の周波数スペクトルによって得られる前記レーダーと前記前方の地面との間の距離によって算出されることが好ましい。
【0015】
本発明は、前記ミスアライメント判断手段からのミスアライメント判断結果に応じて、これを警告する警告手段をさらに備えることが好ましい。
【0016】
本発明は、前記ミスアライメント判断手段からのミスアライメント判断結果に応じて、前記レーダーの垂直方向への歪み角を補償する補償手段をさらに備えることが好ましい。前記補償手段は、前記レーダーの送信アンテナのアレイ因子を補償することにより、前記歪み角をソフトウェア的に補償したり、モータ駆動によって前記レーダーの歪み角を物理的に補償することが好ましい。
【0017】
また、上記の目的を達成するための本発明に係る車両レーダーの垂直方向へのアライメント方法は、車両のレーダー内に設置された第1の水平方向傾きセンサから第1の水平傾きを受信し、車両のセンサクラスタ内に設置された第2の水平方向傾きセンサから第2の水平傾きを受信するステップと、前記第1の水平傾き及び第2の水平傾きに基づいて、前記レーダーの水平方向へのミスアライメント可否を判断するステップとを含むことを特徴とする。
【0018】
本発明において、前記ミスアライメント可否を判断するステップは、前記第1の水平傾きと第2の水平傾きとの間の差を算出するステップと、前記第1の水平傾きと第2の水平傾きとの間の差が予め設定された水平傾きしきい値以上であるか否かを確認するステップとを含むことが好ましい。
【0019】
本発明において、前記ミスアライメント可否の判断結果、ミスアライメントと判断された場合に警告するステップをさらに含むことが好ましい。
【0020】
本発明において、前記ミスアライメント可否の判断結果、ミスアライメントと判断された場合、前記レーダーの水平方向への歪み角を補償するステップをさらに含むことが好ましい。
【0021】
本発明において、前記歪み角を補償するステップは、前記レーダーの送信アンテナのアレイ因子を補償することにより、前記歪み角をソフトウェア的に補償したり、モータ駆動によって前記レーダーの歪み角を物理的に補償することでなされることが好ましい。
【0022】
また、上記の目的を達成するための本発明に係る車両レーダーの垂直方向へのアライメント方法は、車両のレーダー内に設置された第1の垂直方向傾きセンサから第1の垂直傾きを受信し、車両のセンサクラスタ内に設置された第2の垂直方向傾きセンサから第2の垂直傾きを受信するステップと、前記第1の垂直傾き及び第2の垂直傾きに基づいて、前記レーダーの垂直方向へのミスアライメント可否を判断するステップとを含むことを特徴とする。
【0023】
本発明において、前記ミスアライメント可否を判断するステップは、前記第1の垂直傾きと第2の垂直傾きとの間の差を算出するステップと、前記第1の垂直傾きと第2の垂直傾きとの間の差が予め設定された垂直傾きしきい値以上であるか否かを確認するステップとを含むことが好ましい。
【0024】
本発明において、前記ミスアライメント可否の判断結果、ミスアライメントと判断された場合に警告するステップをさらに含むことが好ましい。
【0025】
本発明において、前記ミスアライメント可否の判断結果、ミスアライメントと判断された場合、前記レーダーの垂直方向への歪み角を補償するステップをさらに含むことが好ましい。
【0026】
本発明において、前記歪み角を補償するステップは、前記レーダーの送信アンテナのアレイ因子を補償することにより、前記歪み角をソフトウェア的に補償したり、モータ駆動によって前記レーダーの歪み角を物理的に補償することでなされることが好ましい。
【発明の効果】
【0027】
本発明に係る車両レーダーのアライメント方法及びシステムは、車両に装着されたレーダーの水平または垂直方向へのミスアライメント発生時、これを自動で検出して使用者に警告したり、これを自動で補正できるようにする効果がある。
【図面の簡単な説明】
【0028】
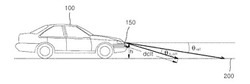
【図1】本発明の第1の実施形態に係る車両レーダーの垂直方向へのアライメント方法及びシステムを説明するための概念図である。
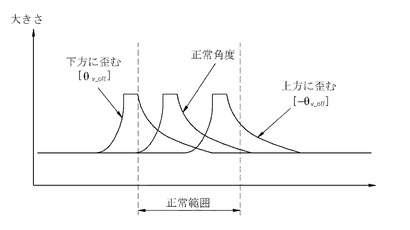
【図2】第1の実施形態において、車両レーダーの電波放射角度による反射波の周波数スペクトルを示したものである。
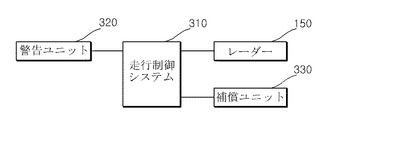
【図3】第1の実施形態に係る車両レーダーの垂直方向へのアライメントシステムの構成を示した概略図である。
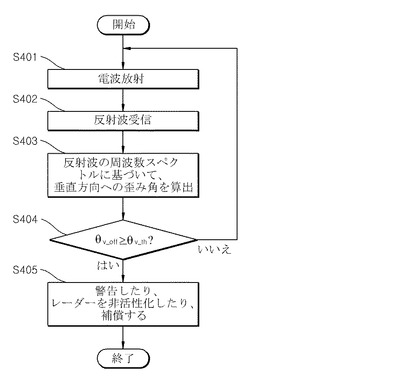
【図4】第1の実施形態に係る車両レーダーの垂直方向へのアライメント方法を示したフローチャートである。
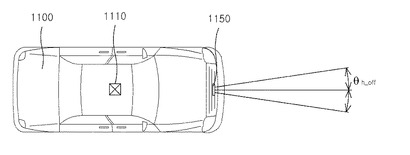
【図5】本発明の第2の実施形態に係る車両レーダーの水平方向へのアライメント方法を説明するための概念図である。
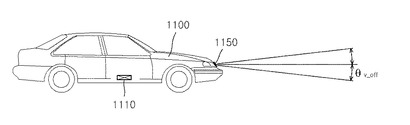
【図6】本発明の第3の実施形態に係る車両レーダーの垂直方向へのアライメント方法を説明するための概念図である。
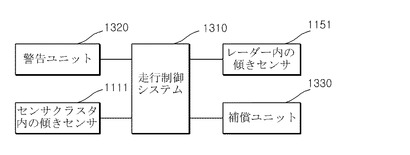
【図7】第2の実施形態及び第3の実施形態に係る車両レーダーの水平または垂直方向へのアライメントシステムの構成を示した概略図である。
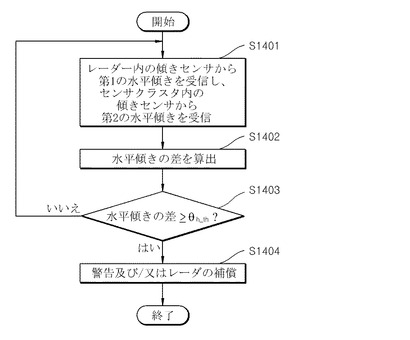
【図8】前記第2の実施形態に係る車両レーダーの水平方向へのアライメント方法を示したフローチャートである。
【図9】前記第3の実施形態に係る車両レーダーの垂直方向へのアライメント方法を示したフローチャートである。
【発明を実施するための形態】
【0029】
以下、実施形態によって本発明をより詳細に説明する。これらの実施形態は、単に本発明を例示するためのものであり、本発明の権利保護範囲がこれらの実施形態によって制限されるものではない。
【0030】
図1は、本発明の第1の実施形態に係る車両レーダーの垂直方向へのアライメント方法及びシステムを説明するための概念図であり、図2は、車両レーダーの電波放射角度による反射波の周波数スペクトルであり、図3は、車両レーダーの垂直方向へのアライメントシステムの構成であり、図4は、第1の実施形態に係る車両レーダーの垂直方向へのアライメント方法を示したフローチャートである。これを参照して本発明を説明すれば、次のとおりである。
【0031】
図3に示すように、本実施形態に係る車両レーダーの垂直方向へのアライメントシステムは、車両100に設置されて前方の地面200に向かって電波を放射し、その反射波を受信するレーダー150と、該反射波に基づいて、前記レーダー150の垂直方向へのミスアライメント可否を判断する走行制御システム310と、該走行制御システム310からのミスアライメント判断結果に応じて、これを警告する警告ユニット320と、走行制御システム310からのミスアライメント判断結果に応じて、前記レーダー150の垂直方向への歪み角を補償する補償ユニット330とを備えて構成される。
【0032】
このように構成された第1の実施形態の動作を、図1〜図4を参照して具体的に説明する。
【0033】
まず、車両100に設置されたレーダー150が前方の地面200に向かって電波を放射する(S401)。このとき、前記電波は図1に示すように、前方直進方向と地面200との間に所定の角をなすように放射され、レーダー150が垂直方向に正常にアライメントされていると、図1のθrefの角をなしつつ放射され、この値は、走行制御システム310などに予め保存される。放射される前記電波としては、レーダー150の送信アンテナの類型によって多様な種類の電波が使用され得る。例えば、1つのアンテナ素子を備えた送信アンテナを使用する場合には、電波が放射される範囲である視界(field of view、FOV)を垂直方向に広げることができるように、単一エレメントを構成すれば、地面に向かって電波が放射されるようにすることができる。また、2つ以上のアンテナ素子を備えたアレイアンテナを使用する場合には、ターゲットがある前方に向かって進む主ビーム(main beam、main lobe)とは別に、地面に向かう補助ビーム(side beam、side lobe)を形成することにより、前記地面に向かう電波を実現することができ、これは、前記アレイアンテナのアレイ因子(array factor)を適宜設計することにより実現可能である。
【0034】
次いで、前記電波放射によって地面200に反射される反射波をレーダー150が受信する(S402)。本実施形態では、受信された反射波から得られる反射波の周波数スペクトル、例えば、クラッタースペクトル(clutter spectrum)などを用いることができ、これは、図2に示されたとおりである。
【0035】
次に、走行制御システム310は、前記反射波、特に、反射波の周波数スペクトルに基づいて、レーダー150の垂直方向へのミスアライメント可否を判断する。このために、走行制御システム310は、まず前記反射波の周波数スペクトルに基づいて、レーダー150の垂直方向への歪み角を算出する(S403)。これを詳しく説明すれば、上述したように、レーダー150が垂直方向に正常にアライメントされていると、電波は図1のθrefの角をなしつつ放射されるが、もし、レーダー150が垂直方向に上方または下方にミスアライメントされていると、図1に示されたように、電波は、所定の歪み角θv_offの分だけ歪んで放射される。この歪み角は、レーダー150と地面200との間の距離dcltから算出することができるが、これを詳しく説明すれば、次のとおりである。
【0036】
まず、レーダー150と前方の地面200との間の距離dcltは、図2に示すような反射波の周波数スペクトルから得ることができる。すなわち、図2に示された反射波の周波数スペクトル、特に、クラッタースペクトルによれば、レーダー150が正常範囲内でアライメントされている場合には、その周波数スペックトラムも図2に示された「正常範囲」で検出される。しかし、もし、レーダー150が正常範囲を外れて垂直方向に下方に歪んで前記距離dcltが減少されると、反射波の周波数スペクトルは、図2に示されたように、「正常範囲」より低い周波数範囲で表れるようになる。そして、もし、レーダー150が正常範囲を外れて垂直方向に上方に歪んで前記距離dcltが増加すると、反射波の周波数スペクトルは、図2に示されたように、「正常範囲」より高い周波数範囲で表れるようになる。したがって、反射波の周波数スペクトル上で特定波形が周波数の「正常範囲」を外れた程度を測定することにより、レーダー150と前方地面200との間の距離dcltを測定することができる。
【0037】
前記歪み角θv_offは、次の[数1]及び[数2]によって算出される。
【0038】
【数1】

【0039】
【数2】
【0040】
(ただし、前記数学式において、θv_offが正(+)であれば、レーダー150が基準位置から下方に歪むことを表し、θv_offが負(−)であれば、レーダー150が基準位置から上方に歪むことを表す。)
【0041】
次に、走行制御システム310は、前記歪み角θv_off(さらに正確にいえば、θv_offの絶対値)が予め設定されたしきい値θv_th以上になるか否かを確認する(S404)。このとき、もし、歪み角θv_offが前記しきい値θv_th以上になると、レーダー150が垂直方向にミスアライメントされたものと判断してステップS405に進むが、もし、そうでなければ、ステップS401に進んで前記ステップを繰り返す。
【0042】
前記ステップS404でレーダー150が垂直方向にミスアライメントされたものと判断された場合、レーダー150が垂直方向にミスアライメントされたことを使用者に警告したり、前記警告をし、レーダー150を非活性化させたり、レーダー150の垂直方向への歪み角θv_offを補償する(S405)。すなわち、レーダー150が垂直方向にミスアライメントされたものと判断された場合、走行制御システム310は、警告ユニット320にて音響または視覚的ディスプレイを介して使用者に警告を発するようにすることができ、また、さらには、レーダー150を非活性化させることができる。
【0043】
また、レーダー150が垂直方向にミスアライメントされたものと判断された場合、走行制御システム310は、補償ユニット330にてレーダー150の垂直方向への歪み角θv_offを補償させることができる。この場合、前記歪み角θv_offを補償することは、レーダー150の送信アンテナのアレイ因子を補償することにより、前記歪み角θv_offをソフトウェア的に補償したり、モータ(図示せず)駆動によってレーダー150の歪み角を物理的に補償することで実現されることができる。すなわち、ソフトウェア的に送信アンテナのアレイ因子を補償または訂正することにより、レーダー150から放射される電波または主ビームと補助ビームの放射方向を補正することができ、または、レーダー150に設置されたステップモータなどの駆動手段にて物理的にレーダー150の放射方向を修正させることもできる。
【0044】
このように、第1の実施形態に係る車両レーダーの垂直方向へのアライメント方法及びシステムは、車両の前方に装着されたレーダーの垂直方向へのミスアライメント発生時、これを自動で検出して使用者に警告したり、これを自動で補正できるようにする。
【0045】
図5は、本発明の第2の実施形態に係る車両レーダーの水平方向へのアライメント方法を説明するための概念図であり、図6は、本発明の第3の実施形態に係る車両レーダーの垂直方向へのアライメント方法を説明するための概念図であり、図7は、第2の実施形態及び第3の実施形態に係る車両レーダーの水平または垂直方向へのアライメントシステムの構成を示した概略図である。また、図8は、前記第2の実施形態に係る車両レーダーの水平方向へのアライメント方法を示したフローチャートであり、図9は、前記第3の実施形態に係る車両レーダーの垂直方向へのアライメント方法を示したフローチャートである。
【0046】
図7に示すように、第2の実施形態及び第3の実施形態に係る車両レーダーの水平または垂直方向へのアライメントシステムは、車両1100のレーダー1150に設置された水平または垂直方向傾きセンサ1151と、車両1100のセンサクラスタ1110内に設置された水平または垂直方向傾きセンサ1111と、水平または垂直方向傾きセンサ1151からの第1の水平または垂直傾き及び水平または垂直方向傾きセンサ1111からの第2の水平または垂直傾きに基づいて、前記レーダー1150の水平または垂直方向へのミスアライメント可否を判断する走行制御システム1310と、前記走行制御システム1310からのミスアライメント判断結果に応じて、これを警告する警告ユニット1320と、走行制御システム1310からのミスアライメント判断結果に応じて、前記レーダー1150の水平または垂直方向への歪み角を補償する補償ユニット1330とを備えて構成される。
【0047】
まず、図5、図7、図8を参照して、第2の実施形態に係る車両レーダーの水平方向へのアライメント方法について説明する。
【0048】
車両1100のレーダー1150内に設置された傾きセンサ、特に、水平方向傾きセンサ1151から第1の水平傾きを受信し、車両1100のセンサクラスタ1110内に設置された傾きセンサ、特に、水平方向傾きセンサ1111から第2の水平傾きを受信する(S1401)。水平方向傾きセンサ1151は、車両1100の適正位置に設置されたレーダー1150内に装着されて水平方向、すなわち、車両1100の前方に向かってみるとき、左右方向への傾きを感知することにより、レーダー1150が前記水平方向に歪んでいる程度を感知する。
【0049】
また、水平方向傾きセンサ1111は、車両1100のセンサクラスタ1110内に装着されて、水平方向、すなわち、車両1100の前方に向かってみるとき、左右方向への傾きを感知することにより、車両1100本体の水平方向への傾きまたは方向を感知する。センサクラスタ1110は主に、車両1100の重さ中心近傍に位置したコンソールボックスの下の部位などに設置され、車両1100の各種センサが装着されている。
【0050】
次に、走行制御システム1310は、前記第1の水平傾き及び第2の水平傾きに基づいて、レーダー1150の水平方向へのミスアライメント可否を判断する。これをステップ別に説明すると、まず、走行制御システム1310は、前記第1の水平傾きと第2の水平傾きとの間の差を算出する(S1402)。そして、続いて走行制御システム1310は、前記第1の水平傾きと第2の水平傾きとの間の差が予め設定された水平傾きしきい値θh_th以上であるか否かを確認することにより、ミスアライメント可否を判断する(S1403)。すなわち、もし、前記第1の水平傾きと第2の水平傾きとの間の差が予め設定された水平傾きしきい値θh_th以上になると、これは、車両1100前方の水平方向に対してレーダー1150が水平方向に一定水準以上歪んでいることを表すようになる。これにより、走行制御システム1310は、レーダー1150の水平方向へのミスアライメント可否を確認することができるものである。ステップS1403の判断結果、水平方向にミスアライメント状態であると判断されればステップS1404に進み、それとも、ステップS1401に復帰して前記ステップを繰り返す。
【0051】
もし、前記ステップS1403でレーダー1150が水平方向にミスアライメントされたものと判断された場合、レーダー1150が水平方向にミスアライメントされたことを使用者に警告したり、レーダー1150の水平方向への歪み角θh_offを補償する(S1404)。すなわち、レーダー1150が水平方向にミスアライメントされたものと判断された場合、走行制御システム1310は、警告ユニット1320にて音響または視覚的ディスプレイを介して使用者に警告を発するようにすることができる。また、レーダー1150が水平方向にミスアライメントされたものと判断された場合、走行制御システム1310は、補償ユニット1330にてレーダー1150の水平方向への歪み角θh_offを補償させることができる。この場合、前記歪み角θh_offを補償することは、レーダー1150の送信アンテナのアレイ因子を補償することにより、前記歪み角θh_offをソフトウェア的に補償したり、モータ(図示せず)駆動によってレーダー1150の歪み角を物理的に補償することで実現されることができる。すなわち、ソフトウェア的に送信アンテナのアレイ因子を補償または訂正することにより、レーダー1150から放射される電波または主ビームと補助ビームの放射方向を補正することができ、または、レーダー1150に設置されたステップモータなどの駆動手段にて物理的にレーダー1150の放射方向を修正させることができる。
【0052】
このように、第2の実施形態に係る車両レーダーの水平方向へのアライメント方法は、車両に装着されたレーダーの水平方向へのミスアライメント発生時、これを自動で検出して使用者に警告したり、これを自動で補正できるようにする。
【0053】
次に、図6、図7、図9を参照して、第3の実施形態に係る車両レーダーの垂直方向へのアライメント方法について説明する。ここで、前記第2の実施形態で記述されたことと同じ部分は、その記載を省略する。
【0054】
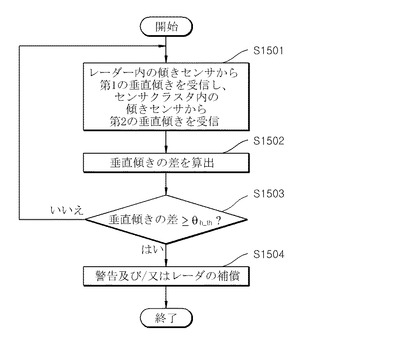
まず、車両1100のレーダー1150内に設置された傾きセンサ、特に、垂直方向傾きセンサ1151から第1の垂直傾きを受信し、車両1100のセンサクラスタ1110内に設置された傾きセンサ、特に、垂直方向傾きセンサ1111から第2の垂直傾きを受信する(S1501)。垂直方向傾きセンサ1151は、レーダー1150内に装着されて、垂直方向、すなわち、車両1100の前方に向かってみるとき、上下方向への傾きを感知することにより、レーダー1150が前記垂直方向に歪んでいる程度を感知する。
【0055】
また、垂直方向傾きセンサ1111は、車両1100のセンサクラスタ1110内に装着されて、垂直方向、すなわち、車両1100の前方に向かってみるとき、上下方向への傾きを感知することにより、車両1100本体の垂直方向への傾きまたは方向を感知する。
【0056】
次に、走行制御システム1310は、前記第1の垂直傾き及び第2の垂直傾きに基づいて、レーダー1150の垂直方向へのミスアライメント可否を判断する。これをステップ別に説明すると、まず、走行制御システム1310は、前記第1の垂直傾きと第2の垂直傾きとの間の差を算出する(S1502)。そして、続いて走行制御システム1310は、前記第1の垂直傾きと第2の垂直傾きとの間の差が予め設定された垂直傾きしきい値θv_th以上であるか否かを確認することにより、ミスアライメント可否を判断する(S1503)。すなわち、もし、前記第1の垂直傾きと第2の垂直傾きとの間の差が予め設定された垂直傾きしきい値θv_th以上になると、これは、車両1100前方の垂直方向に対してレーダー1150が垂直方向に一定水準以上歪んでいることを表すようになる。これにより、走行制御システム1310は、レーダー1150の垂直方向へのミスアライメント可否を確認することができるものである。ステップS1503の判断結果、垂直方向にミスアライメント状態であると判断されればステップS1504に進み、それとも、ステップS1501に復帰して前記ステップを繰り返す。
【0057】
もし、前記ステップS1503でレーダー1150が垂直方向にミスアライメントされたものと判断された場合、レーダー1150が垂直方向にミスアライメントされたことを使用者に警告したり、レーダー1150の垂直方向への歪み角θv_offを補償する(S1504)。すなわち、車両制御システム1310は、警告ユニット1320にて音響または視覚的ディスプレイを介して使用者に警告を発するようにすることができる。また、レーダー1150が垂直方向にミスアライメントされたものと判断された場合、走行制御システム1310は、補償ユニット1330にてレーダー1150の垂直方向への歪み角θv_offを補償させることができる。この場合、前記歪み角θv_offを補償することは、レーダー1150の送信アンテナのアレイ因子を補償することにより、前記歪み角θv_offをソフトウェア的に補償したり、モータ(図示せず)駆動によってレーダー1150の歪み角を物理的に補償することで実現されることができる。
【0058】
このように、第3の実施形態に係る車両レーダーの垂直方向へのアライメント方法は、車両に装着されたレーダーの垂直方向へのミスアライメント発生時、これを自動で検出して使用者に警告したり、これを自動で補正できるようにする。
【符号の説明】
【0059】
100 車両
150 レーダー
200 地面
310 走行制御システム
320 警告ユニット
330 補償ユニット
1100 車両
1110 センサクラスタ
1111 センサクラスタ内の傾きセンサ
1150 レーダー
1151 レーダー内の傾きセンサ
1310 走行制御システム
1320 警告ユニット
1330 補償ユニット
【技術分野】
【0001】
本発明は、車両レーダーのアライメント方法及びシステムに関し、より詳細には、車両に装着されたレーダーの垂直または水平方向へのミスアライメント(misalignment)を自動で検出できるようにする車両レーダーのアライメント方法及びシステムに関する。
【背景技術】
【0002】
一般に、車両のアダプティブクルーズコントロールACC(Adaptive Cruise Control)システムは、車両前方に装着されたレーダーで検出される先行車両の位置及び距離を介して車両のスロットルバルブ、ブレーキ、及び変速機などを自動制御し、適切な加減速を行うことにより、先行車両と適正距離が維持されるようにするシステムである。通常、車両のアダプティブクルーズコントロールシステムでは、レーダーが車両のフロントエンドモジュールに装着されて先行車両の位置及び距離を検出するため、前記レーダーの方向性に対するアライメントと分析座標値に対するアナリシスとは、アダプティブクルーズコントロールにおいて非常に重要である。
【0003】
しかし、従来、上記のように車両に装着されるレーダーの方向性、特に、地面に対して水平または垂直方向にレーダーのミスアライメントが発生する場合、これを効果的に自動で検出して使用者に知らせることができないという問題があった。これにより、従来では、レーダーの水平または垂直方向へのミスアライメントによって先行車両などに対する誤った走行情報が提供される場合にも、それが正しいものであるか、または誤ったものであるかを使用者は確認することができず、それにより、車両走行中、安全事故の危険が増加するという問題があった。
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明は、上記のような従来技術の問題を解決するために提案されたものであって、その目的は、車両に装着されたレーダーの水平または垂直方向へのミスアライメント発生時、これを自動で検出して使用者に警告したり、これを自動で補正できるようにする車両レーダーのアライメント方法及びシステムを提供することにある。
【課題を解決するための手段】
【0005】
そこで、上記の目的を達成するための本発明に係る車両レーダーの垂直方向へのアライメント方法は、車両に設置されたレーダーが前方の地面に向かって電波を放射するステップと、前記地面から反射される反射波を受信するステップと、該反射波に基づいて、前記レーダーの垂直方向へのミスアライメント可否を判断するステップとを含むことを特徴とする。
【0006】
本発明において、前記ミスアライメント可否を判断するステップは、前記反射波の周波数スペクトルに基づいてなされることが好ましい。
【0007】
本発明において、前記ミスアライメント可否を判断するステップは、前記反射波の周波数スペクトルに基づいて、前記レーダーの垂直方向への歪み角を算出するステップと、該歪み角が予め設定されたしきい値以上になるか否かを確認するステップとを含み、前記垂直方向への歪み角は、前記反射波の周波数スペクトルによって得られる前記レーダーと前記前方の地面との間の距離によって算出されることが好ましい。
【0008】
本発明は、前記ミスアライメント可否の判断結果、ミスアライメントと判断された場合に警告するステップをさらに含むことが好ましい。
【0009】
本発明は、前記ミスアライメント可否の判断結果、ミスアライメントと判断された場合に警告し、前記レーダーを非活性化させるステップをさらに含むことが好ましい。
【0010】
本発明は、前記ミスアライメント可否の判断結果、ミスアライメントと判断された場合、前記レーダーの垂直方向への歪み角を補償するステップをさらに含むことが好ましい。前記歪み角を補償するステップは、前記レーダーの送信アンテナのアレイ因子を補償することにより、前記歪み角をソフトウェア的に補償したり、モータ駆動によって前記レーダーの歪み角を物理的に補償することでなされることが好ましい。
【0011】
また、上記の目的を達成するための本発明に係る車両レーダーの垂直方向へのアライメントシステムは、車両に設置されて前方の地面に向かって電波を放射し、その反射波を受信するレーダーと、該反射波に基づいて、前記レーダーの垂直方向へのミスアライメント可否を判断するミスアライメント判断手段とを備えることを特徴とする。
【0012】
本発明において、前記ミスアライメント判断手段は、前記反射波の周波数スペクトルに基づいて判断することが好ましい。
【0013】
本発明において、前記ミスアライメント判断手段は、前記反射波の周波数スペクトルに基づいて、前記レーダーの垂直方向への歪み角を算出し、前記歪み角を予め設定されたしきい値と比較することによって、前記レーダーの垂直方向へのミスアライメント可否を判断することが好ましい。
【0014】
本発明において、前記垂直方向への歪み角は、前記反射波の周波数スペクトルによって得られる前記レーダーと前記前方の地面との間の距離によって算出されることが好ましい。
【0015】
本発明は、前記ミスアライメント判断手段からのミスアライメント判断結果に応じて、これを警告する警告手段をさらに備えることが好ましい。
【0016】
本発明は、前記ミスアライメント判断手段からのミスアライメント判断結果に応じて、前記レーダーの垂直方向への歪み角を補償する補償手段をさらに備えることが好ましい。前記補償手段は、前記レーダーの送信アンテナのアレイ因子を補償することにより、前記歪み角をソフトウェア的に補償したり、モータ駆動によって前記レーダーの歪み角を物理的に補償することが好ましい。
【0017】
また、上記の目的を達成するための本発明に係る車両レーダーの垂直方向へのアライメント方法は、車両のレーダー内に設置された第1の水平方向傾きセンサから第1の水平傾きを受信し、車両のセンサクラスタ内に設置された第2の水平方向傾きセンサから第2の水平傾きを受信するステップと、前記第1の水平傾き及び第2の水平傾きに基づいて、前記レーダーの水平方向へのミスアライメント可否を判断するステップとを含むことを特徴とする。
【0018】
本発明において、前記ミスアライメント可否を判断するステップは、前記第1の水平傾きと第2の水平傾きとの間の差を算出するステップと、前記第1の水平傾きと第2の水平傾きとの間の差が予め設定された水平傾きしきい値以上であるか否かを確認するステップとを含むことが好ましい。
【0019】
本発明において、前記ミスアライメント可否の判断結果、ミスアライメントと判断された場合に警告するステップをさらに含むことが好ましい。
【0020】
本発明において、前記ミスアライメント可否の判断結果、ミスアライメントと判断された場合、前記レーダーの水平方向への歪み角を補償するステップをさらに含むことが好ましい。
【0021】
本発明において、前記歪み角を補償するステップは、前記レーダーの送信アンテナのアレイ因子を補償することにより、前記歪み角をソフトウェア的に補償したり、モータ駆動によって前記レーダーの歪み角を物理的に補償することでなされることが好ましい。
【0022】
また、上記の目的を達成するための本発明に係る車両レーダーの垂直方向へのアライメント方法は、車両のレーダー内に設置された第1の垂直方向傾きセンサから第1の垂直傾きを受信し、車両のセンサクラスタ内に設置された第2の垂直方向傾きセンサから第2の垂直傾きを受信するステップと、前記第1の垂直傾き及び第2の垂直傾きに基づいて、前記レーダーの垂直方向へのミスアライメント可否を判断するステップとを含むことを特徴とする。
【0023】
本発明において、前記ミスアライメント可否を判断するステップは、前記第1の垂直傾きと第2の垂直傾きとの間の差を算出するステップと、前記第1の垂直傾きと第2の垂直傾きとの間の差が予め設定された垂直傾きしきい値以上であるか否かを確認するステップとを含むことが好ましい。
【0024】
本発明において、前記ミスアライメント可否の判断結果、ミスアライメントと判断された場合に警告するステップをさらに含むことが好ましい。
【0025】
本発明において、前記ミスアライメント可否の判断結果、ミスアライメントと判断された場合、前記レーダーの垂直方向への歪み角を補償するステップをさらに含むことが好ましい。
【0026】
本発明において、前記歪み角を補償するステップは、前記レーダーの送信アンテナのアレイ因子を補償することにより、前記歪み角をソフトウェア的に補償したり、モータ駆動によって前記レーダーの歪み角を物理的に補償することでなされることが好ましい。
【発明の効果】
【0027】
本発明に係る車両レーダーのアライメント方法及びシステムは、車両に装着されたレーダーの水平または垂直方向へのミスアライメント発生時、これを自動で検出して使用者に警告したり、これを自動で補正できるようにする効果がある。
【図面の簡単な説明】
【0028】
【図1】本発明の第1の実施形態に係る車両レーダーの垂直方向へのアライメント方法及びシステムを説明するための概念図である。
【図2】第1の実施形態において、車両レーダーの電波放射角度による反射波の周波数スペクトルを示したものである。
【図3】第1の実施形態に係る車両レーダーの垂直方向へのアライメントシステムの構成を示した概略図である。
【図4】第1の実施形態に係る車両レーダーの垂直方向へのアライメント方法を示したフローチャートである。
【図5】本発明の第2の実施形態に係る車両レーダーの水平方向へのアライメント方法を説明するための概念図である。
【図6】本発明の第3の実施形態に係る車両レーダーの垂直方向へのアライメント方法を説明するための概念図である。
【図7】第2の実施形態及び第3の実施形態に係る車両レーダーの水平または垂直方向へのアライメントシステムの構成を示した概略図である。
【図8】前記第2の実施形態に係る車両レーダーの水平方向へのアライメント方法を示したフローチャートである。
【図9】前記第3の実施形態に係る車両レーダーの垂直方向へのアライメント方法を示したフローチャートである。
【発明を実施するための形態】
【0029】
以下、実施形態によって本発明をより詳細に説明する。これらの実施形態は、単に本発明を例示するためのものであり、本発明の権利保護範囲がこれらの実施形態によって制限されるものではない。
【0030】
図1は、本発明の第1の実施形態に係る車両レーダーの垂直方向へのアライメント方法及びシステムを説明するための概念図であり、図2は、車両レーダーの電波放射角度による反射波の周波数スペクトルであり、図3は、車両レーダーの垂直方向へのアライメントシステムの構成であり、図4は、第1の実施形態に係る車両レーダーの垂直方向へのアライメント方法を示したフローチャートである。これを参照して本発明を説明すれば、次のとおりである。
【0031】
図3に示すように、本実施形態に係る車両レーダーの垂直方向へのアライメントシステムは、車両100に設置されて前方の地面200に向かって電波を放射し、その反射波を受信するレーダー150と、該反射波に基づいて、前記レーダー150の垂直方向へのミスアライメント可否を判断する走行制御システム310と、該走行制御システム310からのミスアライメント判断結果に応じて、これを警告する警告ユニット320と、走行制御システム310からのミスアライメント判断結果に応じて、前記レーダー150の垂直方向への歪み角を補償する補償ユニット330とを備えて構成される。
【0032】
このように構成された第1の実施形態の動作を、図1〜図4を参照して具体的に説明する。
【0033】
まず、車両100に設置されたレーダー150が前方の地面200に向かって電波を放射する(S401)。このとき、前記電波は図1に示すように、前方直進方向と地面200との間に所定の角をなすように放射され、レーダー150が垂直方向に正常にアライメントされていると、図1のθrefの角をなしつつ放射され、この値は、走行制御システム310などに予め保存される。放射される前記電波としては、レーダー150の送信アンテナの類型によって多様な種類の電波が使用され得る。例えば、1つのアンテナ素子を備えた送信アンテナを使用する場合には、電波が放射される範囲である視界(field of view、FOV)を垂直方向に広げることができるように、単一エレメントを構成すれば、地面に向かって電波が放射されるようにすることができる。また、2つ以上のアンテナ素子を備えたアレイアンテナを使用する場合には、ターゲットがある前方に向かって進む主ビーム(main beam、main lobe)とは別に、地面に向かう補助ビーム(side beam、side lobe)を形成することにより、前記地面に向かう電波を実現することができ、これは、前記アレイアンテナのアレイ因子(array factor)を適宜設計することにより実現可能である。
【0034】
次いで、前記電波放射によって地面200に反射される反射波をレーダー150が受信する(S402)。本実施形態では、受信された反射波から得られる反射波の周波数スペクトル、例えば、クラッタースペクトル(clutter spectrum)などを用いることができ、これは、図2に示されたとおりである。
【0035】
次に、走行制御システム310は、前記反射波、特に、反射波の周波数スペクトルに基づいて、レーダー150の垂直方向へのミスアライメント可否を判断する。このために、走行制御システム310は、まず前記反射波の周波数スペクトルに基づいて、レーダー150の垂直方向への歪み角を算出する(S403)。これを詳しく説明すれば、上述したように、レーダー150が垂直方向に正常にアライメントされていると、電波は図1のθrefの角をなしつつ放射されるが、もし、レーダー150が垂直方向に上方または下方にミスアライメントされていると、図1に示されたように、電波は、所定の歪み角θv_offの分だけ歪んで放射される。この歪み角は、レーダー150と地面200との間の距離dcltから算出することができるが、これを詳しく説明すれば、次のとおりである。
【0036】
まず、レーダー150と前方の地面200との間の距離dcltは、図2に示すような反射波の周波数スペクトルから得ることができる。すなわち、図2に示された反射波の周波数スペクトル、特に、クラッタースペクトルによれば、レーダー150が正常範囲内でアライメントされている場合には、その周波数スペックトラムも図2に示された「正常範囲」で検出される。しかし、もし、レーダー150が正常範囲を外れて垂直方向に下方に歪んで前記距離dcltが減少されると、反射波の周波数スペクトルは、図2に示されたように、「正常範囲」より低い周波数範囲で表れるようになる。そして、もし、レーダー150が正常範囲を外れて垂直方向に上方に歪んで前記距離dcltが増加すると、反射波の周波数スペクトルは、図2に示されたように、「正常範囲」より高い周波数範囲で表れるようになる。したがって、反射波の周波数スペクトル上で特定波形が周波数の「正常範囲」を外れた程度を測定することにより、レーダー150と前方地面200との間の距離dcltを測定することができる。
【0037】
前記歪み角θv_offは、次の[数1]及び[数2]によって算出される。
【0038】
【数1】
【0039】
【数2】
【0040】
(ただし、前記数学式において、θv_offが正(+)であれば、レーダー150が基準位置から下方に歪むことを表し、θv_offが負(−)であれば、レーダー150が基準位置から上方に歪むことを表す。)
【0041】
次に、走行制御システム310は、前記歪み角θv_off(さらに正確にいえば、θv_offの絶対値)が予め設定されたしきい値θv_th以上になるか否かを確認する(S404)。このとき、もし、歪み角θv_offが前記しきい値θv_th以上になると、レーダー150が垂直方向にミスアライメントされたものと判断してステップS405に進むが、もし、そうでなければ、ステップS401に進んで前記ステップを繰り返す。
【0042】
前記ステップS404でレーダー150が垂直方向にミスアライメントされたものと判断された場合、レーダー150が垂直方向にミスアライメントされたことを使用者に警告したり、前記警告をし、レーダー150を非活性化させたり、レーダー150の垂直方向への歪み角θv_offを補償する(S405)。すなわち、レーダー150が垂直方向にミスアライメントされたものと判断された場合、走行制御システム310は、警告ユニット320にて音響または視覚的ディスプレイを介して使用者に警告を発するようにすることができ、また、さらには、レーダー150を非活性化させることができる。
【0043】
また、レーダー150が垂直方向にミスアライメントされたものと判断された場合、走行制御システム310は、補償ユニット330にてレーダー150の垂直方向への歪み角θv_offを補償させることができる。この場合、前記歪み角θv_offを補償することは、レーダー150の送信アンテナのアレイ因子を補償することにより、前記歪み角θv_offをソフトウェア的に補償したり、モータ(図示せず)駆動によってレーダー150の歪み角を物理的に補償することで実現されることができる。すなわち、ソフトウェア的に送信アンテナのアレイ因子を補償または訂正することにより、レーダー150から放射される電波または主ビームと補助ビームの放射方向を補正することができ、または、レーダー150に設置されたステップモータなどの駆動手段にて物理的にレーダー150の放射方向を修正させることもできる。
【0044】
このように、第1の実施形態に係る車両レーダーの垂直方向へのアライメント方法及びシステムは、車両の前方に装着されたレーダーの垂直方向へのミスアライメント発生時、これを自動で検出して使用者に警告したり、これを自動で補正できるようにする。
【0045】
図5は、本発明の第2の実施形態に係る車両レーダーの水平方向へのアライメント方法を説明するための概念図であり、図6は、本発明の第3の実施形態に係る車両レーダーの垂直方向へのアライメント方法を説明するための概念図であり、図7は、第2の実施形態及び第3の実施形態に係る車両レーダーの水平または垂直方向へのアライメントシステムの構成を示した概略図である。また、図8は、前記第2の実施形態に係る車両レーダーの水平方向へのアライメント方法を示したフローチャートであり、図9は、前記第3の実施形態に係る車両レーダーの垂直方向へのアライメント方法を示したフローチャートである。
【0046】
図7に示すように、第2の実施形態及び第3の実施形態に係る車両レーダーの水平または垂直方向へのアライメントシステムは、車両1100のレーダー1150に設置された水平または垂直方向傾きセンサ1151と、車両1100のセンサクラスタ1110内に設置された水平または垂直方向傾きセンサ1111と、水平または垂直方向傾きセンサ1151からの第1の水平または垂直傾き及び水平または垂直方向傾きセンサ1111からの第2の水平または垂直傾きに基づいて、前記レーダー1150の水平または垂直方向へのミスアライメント可否を判断する走行制御システム1310と、前記走行制御システム1310からのミスアライメント判断結果に応じて、これを警告する警告ユニット1320と、走行制御システム1310からのミスアライメント判断結果に応じて、前記レーダー1150の水平または垂直方向への歪み角を補償する補償ユニット1330とを備えて構成される。
【0047】
まず、図5、図7、図8を参照して、第2の実施形態に係る車両レーダーの水平方向へのアライメント方法について説明する。
【0048】
車両1100のレーダー1150内に設置された傾きセンサ、特に、水平方向傾きセンサ1151から第1の水平傾きを受信し、車両1100のセンサクラスタ1110内に設置された傾きセンサ、特に、水平方向傾きセンサ1111から第2の水平傾きを受信する(S1401)。水平方向傾きセンサ1151は、車両1100の適正位置に設置されたレーダー1150内に装着されて水平方向、すなわち、車両1100の前方に向かってみるとき、左右方向への傾きを感知することにより、レーダー1150が前記水平方向に歪んでいる程度を感知する。
【0049】
また、水平方向傾きセンサ1111は、車両1100のセンサクラスタ1110内に装着されて、水平方向、すなわち、車両1100の前方に向かってみるとき、左右方向への傾きを感知することにより、車両1100本体の水平方向への傾きまたは方向を感知する。センサクラスタ1110は主に、車両1100の重さ中心近傍に位置したコンソールボックスの下の部位などに設置され、車両1100の各種センサが装着されている。
【0050】
次に、走行制御システム1310は、前記第1の水平傾き及び第2の水平傾きに基づいて、レーダー1150の水平方向へのミスアライメント可否を判断する。これをステップ別に説明すると、まず、走行制御システム1310は、前記第1の水平傾きと第2の水平傾きとの間の差を算出する(S1402)。そして、続いて走行制御システム1310は、前記第1の水平傾きと第2の水平傾きとの間の差が予め設定された水平傾きしきい値θh_th以上であるか否かを確認することにより、ミスアライメント可否を判断する(S1403)。すなわち、もし、前記第1の水平傾きと第2の水平傾きとの間の差が予め設定された水平傾きしきい値θh_th以上になると、これは、車両1100前方の水平方向に対してレーダー1150が水平方向に一定水準以上歪んでいることを表すようになる。これにより、走行制御システム1310は、レーダー1150の水平方向へのミスアライメント可否を確認することができるものである。ステップS1403の判断結果、水平方向にミスアライメント状態であると判断されればステップS1404に進み、それとも、ステップS1401に復帰して前記ステップを繰り返す。
【0051】
もし、前記ステップS1403でレーダー1150が水平方向にミスアライメントされたものと判断された場合、レーダー1150が水平方向にミスアライメントされたことを使用者に警告したり、レーダー1150の水平方向への歪み角θh_offを補償する(S1404)。すなわち、レーダー1150が水平方向にミスアライメントされたものと判断された場合、走行制御システム1310は、警告ユニット1320にて音響または視覚的ディスプレイを介して使用者に警告を発するようにすることができる。また、レーダー1150が水平方向にミスアライメントされたものと判断された場合、走行制御システム1310は、補償ユニット1330にてレーダー1150の水平方向への歪み角θh_offを補償させることができる。この場合、前記歪み角θh_offを補償することは、レーダー1150の送信アンテナのアレイ因子を補償することにより、前記歪み角θh_offをソフトウェア的に補償したり、モータ(図示せず)駆動によってレーダー1150の歪み角を物理的に補償することで実現されることができる。すなわち、ソフトウェア的に送信アンテナのアレイ因子を補償または訂正することにより、レーダー1150から放射される電波または主ビームと補助ビームの放射方向を補正することができ、または、レーダー1150に設置されたステップモータなどの駆動手段にて物理的にレーダー1150の放射方向を修正させることができる。
【0052】
このように、第2の実施形態に係る車両レーダーの水平方向へのアライメント方法は、車両に装着されたレーダーの水平方向へのミスアライメント発生時、これを自動で検出して使用者に警告したり、これを自動で補正できるようにする。
【0053】
次に、図6、図7、図9を参照して、第3の実施形態に係る車両レーダーの垂直方向へのアライメント方法について説明する。ここで、前記第2の実施形態で記述されたことと同じ部分は、その記載を省略する。
【0054】
まず、車両1100のレーダー1150内に設置された傾きセンサ、特に、垂直方向傾きセンサ1151から第1の垂直傾きを受信し、車両1100のセンサクラスタ1110内に設置された傾きセンサ、特に、垂直方向傾きセンサ1111から第2の垂直傾きを受信する(S1501)。垂直方向傾きセンサ1151は、レーダー1150内に装着されて、垂直方向、すなわち、車両1100の前方に向かってみるとき、上下方向への傾きを感知することにより、レーダー1150が前記垂直方向に歪んでいる程度を感知する。
【0055】
また、垂直方向傾きセンサ1111は、車両1100のセンサクラスタ1110内に装着されて、垂直方向、すなわち、車両1100の前方に向かってみるとき、上下方向への傾きを感知することにより、車両1100本体の垂直方向への傾きまたは方向を感知する。
【0056】
次に、走行制御システム1310は、前記第1の垂直傾き及び第2の垂直傾きに基づいて、レーダー1150の垂直方向へのミスアライメント可否を判断する。これをステップ別に説明すると、まず、走行制御システム1310は、前記第1の垂直傾きと第2の垂直傾きとの間の差を算出する(S1502)。そして、続いて走行制御システム1310は、前記第1の垂直傾きと第2の垂直傾きとの間の差が予め設定された垂直傾きしきい値θv_th以上であるか否かを確認することにより、ミスアライメント可否を判断する(S1503)。すなわち、もし、前記第1の垂直傾きと第2の垂直傾きとの間の差が予め設定された垂直傾きしきい値θv_th以上になると、これは、車両1100前方の垂直方向に対してレーダー1150が垂直方向に一定水準以上歪んでいることを表すようになる。これにより、走行制御システム1310は、レーダー1150の垂直方向へのミスアライメント可否を確認することができるものである。ステップS1503の判断結果、垂直方向にミスアライメント状態であると判断されればステップS1504に進み、それとも、ステップS1501に復帰して前記ステップを繰り返す。
【0057】
もし、前記ステップS1503でレーダー1150が垂直方向にミスアライメントされたものと判断された場合、レーダー1150が垂直方向にミスアライメントされたことを使用者に警告したり、レーダー1150の垂直方向への歪み角θv_offを補償する(S1504)。すなわち、車両制御システム1310は、警告ユニット1320にて音響または視覚的ディスプレイを介して使用者に警告を発するようにすることができる。また、レーダー1150が垂直方向にミスアライメントされたものと判断された場合、走行制御システム1310は、補償ユニット1330にてレーダー1150の垂直方向への歪み角θv_offを補償させることができる。この場合、前記歪み角θv_offを補償することは、レーダー1150の送信アンテナのアレイ因子を補償することにより、前記歪み角θv_offをソフトウェア的に補償したり、モータ(図示せず)駆動によってレーダー1150の歪み角を物理的に補償することで実現されることができる。
【0058】
このように、第3の実施形態に係る車両レーダーの垂直方向へのアライメント方法は、車両に装着されたレーダーの垂直方向へのミスアライメント発生時、これを自動で検出して使用者に警告したり、これを自動で補正できるようにする。
【符号の説明】
【0059】
100 車両
150 レーダー
200 地面
310 走行制御システム
320 警告ユニット
330 補償ユニット
1100 車両
1110 センサクラスタ
1111 センサクラスタ内の傾きセンサ
1150 レーダー
1151 レーダー内の傾きセンサ
1310 走行制御システム
1320 警告ユニット
1330 補償ユニット
【特許請求の範囲】
【請求項1】
車両に設置されたレーダーが前方の地面に向かって電波を放射するステップと、
前記地面から反射される反射波を受信するステップと、
該反射波に基づいて、前記レーダーの垂直方向へのミスアライメント可否を判断するステップと、
を含むことを特徴とする車両レーダーの垂直方向へのアライメント方法。
【請求項2】
前記ミスアライメント可否を判断するステップが、前記反射波の周波数スペクトルに基づいてなされることを特徴とする請求項1に記載の車両レーダーの垂直方向へのアライメント方法。
【請求項3】
前記ミスアライメント可否を判断するステップが、
前記反射波の周波数スペクトルに基づいて、前記レーダーの垂直方向への歪み角を算出するステップと、
該歪み角が予め設定されたしきい値以上になるか否かを確認するステップと、
を含むことを特徴とする請求項2に記載の車両レーダーの垂直方向へのアライメント方法。
【請求項4】
前記垂直方向への歪み角が、前記反射波の周波数スペクトルによって得られる前記レーダーと前記前方の地面との間の距離によって算出されることを特徴とする請求項3に記載の車両レーダーの垂直方向へのアライメント方法。
【請求項5】
前記ミスアライメント可否の判断結果、ミスアライメントと判断された場合に警告するステップをさらに含むことを特徴とする請求項1に記載の車両レーダーの垂直方向へのアライメント方法。
【請求項6】
前記ミスアライメント可否の判断結果、ミスアライメントと判断された場合に警告し、前記レーダーを非活性化させるステップをさらに含むことを特徴とする請求項1に記載の車両レーダーの垂直方向へのアライメント方法。
【請求項7】
前記ミスアライメント可否の判断結果、ミスアライメントと判断された場合、前記レーダーの垂直方向への歪み角を補償するステップをさらに含むことを特徴とする請求項1に記載の車両レーダーの垂直方向へのアライメント方法。
【請求項8】
前記歪み角を補償するステップが、前記レーダーの送信アンテナのアレイ因子を補償することにより、前記歪み角をソフトウェア的に補償したり、モータ駆動によって前記レーダーの歪み角を物理的に補償することでなされることを特徴とする請求項7に記載の車両レーダーの垂直方向へのアライメント方法。
【請求項9】
前記レーダーが、少なくとも2つ以上のアンテナ素子を備えた配列アンテナを備え、
前記前方の地面に向かって放射される電波が補助ビームであることを特徴とする請求項1〜8のいずれか1項に記載の車両レーダーの垂直方向へのアライメント方法。
【請求項10】
車両に設置されて前方の地面に向かって電波を放射し、その反射波を受信するレーダーと、
該反射波に基づいて、前記レーダーの垂直方向へのミスアライメント可否を判断するミスアライメント判断手段と、
を備えることを特徴とする車両レーダーの垂直方向へのアライメントシステム。
【請求項11】
前記ミスアライメント判断手段が、前記反射波の周波数スペクトルに基づいて判断することを特徴とする請求項10に記載の車両レーダーの垂直方向へのアライメントシステム。
【請求項12】
前記ミスアライメント判断手段が、前記反射波の周波数スペクトルに基づいて、前記レーダーの垂直方向への歪み角を算出し、前記歪み角を予め設定されたしきい値と比較することによって、前記レーダーの垂直方向へのミスアライメント可否を判断することを特徴とする請求項11に記載の車両レーダーの垂直方向へのアライメントシステム。
【請求項13】
前記垂直方向への歪み角が、前記反射波の周波数スペクトルによって得られる前記レーダーと前記前方の地面との間の距離によって算出されることを特徴とする請求項12に記載の車両レーダーの垂直方向へのアライメントシステム。
【請求項14】
前記ミスアライメント判断手段からのミスアライメント判断結果に応じて、これを警告する警告手段をさらに備えることを特徴とする請求項10に記載の車両レーダーの垂直方向へのアライメントシステム。
【請求項15】
前記ミスアライメント判断手段からのミスアライメント判断結果に応じて、前記レーダーの垂直方向への歪み角を補償する補償手段をさらに備えることを特徴とする請求項10に記載の車両レーダーの垂直方向へのアライメントシステム。
【請求項16】
前記補償手段が、前記レーダーの送信アンテナのアレイ因子を補償することにより、前記歪み角をソフトウェア的に補償したり、モータ駆動によって前記レーダーの歪み角を物理的に補償することを特徴とする請求項15に記載の車両レーダーの垂直方向へのアライメントシステム。
【請求項17】
前記レーダーが、少なくとも2つ以上のアンテナ素子を備えた配列アンテナを備え、
前記前方の地面に向かって放射される電波が補助ビームであることを特徴とする請求項10〜16のいずれか1項に記載の車両レーダーの垂直方向へのアライメントシステム。
【請求項18】
車両のレーダー内に設置された第1の水平方向傾きセンサから第1の水平傾きを受信し、車両のセンサクラスタ内に設置された第2の水平方向傾きセンサから第2の水平傾きを受信するステップと、
前記第1の水平傾き及び第2の水平傾きに基づいて、前記レーダーの水平方向へのミスアライメント可否を判断するステップと、
を含むことを特徴とする車両レーダーの水平方向へのアライメント方法。
【請求項19】
前記ミスアライメント可否を判断するステップが、
前記第1の水平傾きと第2の水平傾きとの間の差を算出するステップと、
前記第1の水平傾きと第2の水平傾きとの間の差が予め設定された水平傾きしきい値以上であるか否かを確認するステップと、
を含むことを特徴とする請求項18に記載の車両レーダーの水平方向へのアライメント方法。
【請求項20】
前記ミスアライメント可否の判断結果、ミスアライメントと判断された場合に警告するステップをさらに含むことを特徴とする請求項18または19に記載の車両レーダーの水平方向へのアライメント方法。
【請求項21】
前記ミスアライメント可否の判断結果、ミスアライメントと判断された場合、前記レーダーの水平方向への歪み角を補償するステップをさらに含むことを特徴とする請求項18または19に記載の車両レーダーの水平方向へのアライメント方法。
【請求項22】
前記歪み角を補償するステップが、前記レーダーの送信アンテナのアレイ因子を補償することにより、前記歪み角をソフトウェア的に補償したり、モータ駆動によって前記レーダーの歪み角を物理的に補償することでなされることを特徴とする請求項21に記載の車両レーダーの水平方向へのアライメント方法。
【請求項23】
車両のレーダー内に設置された第1の垂直方向傾きセンサから第1の垂直傾きを受信し、車両のセンサクラスタ内に設置された第2の垂直方向傾きセンサから第2の垂直傾きを受信するステップと、
前記第1の垂直傾き及び第2の垂直傾きに基づいて、前記レーダーの垂直方向へのミスアライメント可否を判断するステップと、
を含むことを特徴とする車両レーダーの垂直方向へのアライメント方法。
【請求項24】
前記ミスアライメント可否を判断するステップが、
前記第1の垂直傾きと第2の垂直傾きとの間の差を算出するステップと、
前記第1の垂直傾きと第2の垂直傾きとの間の差が予め設定された垂直傾きしきい値以上であるか否かを確認するステップと、
を含むことを特徴とする請求項23に記載の車両レーダーの垂直方向へのアライメント方法。
【請求項25】
前記ミスアライメント可否の判断結果、ミスアライメントと判断された場合に警告するステップをさらに含むことを特徴とする請求項23または24に記載の車両レーダーの垂直方向へのアライメント方法。
【請求項26】
前記ミスアライメント可否の判断結果、ミスアライメントと判断された場合、前記レーダーの垂直方向への歪み角を補償するステップをさらに含むことを特徴とする請求項23または24に記載の車両レーダーの垂直方向へのアライメント方法。
【請求項27】
前記歪み角を補償するステップが、前記レーダーの送信アンテナのアレイ因子を補償することにより、前記歪み角をソフトウェア的に補償したり、モータ駆動によって前記レーダーの歪み角を物理的に補償することでなされることを特徴とする請求項26に記載の車両レーダーの垂直方向へのアライメント方法。
【請求項1】
車両に設置されたレーダーが前方の地面に向かって電波を放射するステップと、
前記地面から反射される反射波を受信するステップと、
該反射波に基づいて、前記レーダーの垂直方向へのミスアライメント可否を判断するステップと、
を含むことを特徴とする車両レーダーの垂直方向へのアライメント方法。
【請求項2】
前記ミスアライメント可否を判断するステップが、前記反射波の周波数スペクトルに基づいてなされることを特徴とする請求項1に記載の車両レーダーの垂直方向へのアライメント方法。
【請求項3】
前記ミスアライメント可否を判断するステップが、
前記反射波の周波数スペクトルに基づいて、前記レーダーの垂直方向への歪み角を算出するステップと、
該歪み角が予め設定されたしきい値以上になるか否かを確認するステップと、
を含むことを特徴とする請求項2に記載の車両レーダーの垂直方向へのアライメント方法。
【請求項4】
前記垂直方向への歪み角が、前記反射波の周波数スペクトルによって得られる前記レーダーと前記前方の地面との間の距離によって算出されることを特徴とする請求項3に記載の車両レーダーの垂直方向へのアライメント方法。
【請求項5】
前記ミスアライメント可否の判断結果、ミスアライメントと判断された場合に警告するステップをさらに含むことを特徴とする請求項1に記載の車両レーダーの垂直方向へのアライメント方法。
【請求項6】
前記ミスアライメント可否の判断結果、ミスアライメントと判断された場合に警告し、前記レーダーを非活性化させるステップをさらに含むことを特徴とする請求項1に記載の車両レーダーの垂直方向へのアライメント方法。
【請求項7】
前記ミスアライメント可否の判断結果、ミスアライメントと判断された場合、前記レーダーの垂直方向への歪み角を補償するステップをさらに含むことを特徴とする請求項1に記載の車両レーダーの垂直方向へのアライメント方法。
【請求項8】
前記歪み角を補償するステップが、前記レーダーの送信アンテナのアレイ因子を補償することにより、前記歪み角をソフトウェア的に補償したり、モータ駆動によって前記レーダーの歪み角を物理的に補償することでなされることを特徴とする請求項7に記載の車両レーダーの垂直方向へのアライメント方法。
【請求項9】
前記レーダーが、少なくとも2つ以上のアンテナ素子を備えた配列アンテナを備え、
前記前方の地面に向かって放射される電波が補助ビームであることを特徴とする請求項1〜8のいずれか1項に記載の車両レーダーの垂直方向へのアライメント方法。
【請求項10】
車両に設置されて前方の地面に向かって電波を放射し、その反射波を受信するレーダーと、
該反射波に基づいて、前記レーダーの垂直方向へのミスアライメント可否を判断するミスアライメント判断手段と、
を備えることを特徴とする車両レーダーの垂直方向へのアライメントシステム。
【請求項11】
前記ミスアライメント判断手段が、前記反射波の周波数スペクトルに基づいて判断することを特徴とする請求項10に記載の車両レーダーの垂直方向へのアライメントシステム。
【請求項12】
前記ミスアライメント判断手段が、前記反射波の周波数スペクトルに基づいて、前記レーダーの垂直方向への歪み角を算出し、前記歪み角を予め設定されたしきい値と比較することによって、前記レーダーの垂直方向へのミスアライメント可否を判断することを特徴とする請求項11に記載の車両レーダーの垂直方向へのアライメントシステム。
【請求項13】
前記垂直方向への歪み角が、前記反射波の周波数スペクトルによって得られる前記レーダーと前記前方の地面との間の距離によって算出されることを特徴とする請求項12に記載の車両レーダーの垂直方向へのアライメントシステム。
【請求項14】
前記ミスアライメント判断手段からのミスアライメント判断結果に応じて、これを警告する警告手段をさらに備えることを特徴とする請求項10に記載の車両レーダーの垂直方向へのアライメントシステム。
【請求項15】
前記ミスアライメント判断手段からのミスアライメント判断結果に応じて、前記レーダーの垂直方向への歪み角を補償する補償手段をさらに備えることを特徴とする請求項10に記載の車両レーダーの垂直方向へのアライメントシステム。
【請求項16】
前記補償手段が、前記レーダーの送信アンテナのアレイ因子を補償することにより、前記歪み角をソフトウェア的に補償したり、モータ駆動によって前記レーダーの歪み角を物理的に補償することを特徴とする請求項15に記載の車両レーダーの垂直方向へのアライメントシステム。
【請求項17】
前記レーダーが、少なくとも2つ以上のアンテナ素子を備えた配列アンテナを備え、
前記前方の地面に向かって放射される電波が補助ビームであることを特徴とする請求項10〜16のいずれか1項に記載の車両レーダーの垂直方向へのアライメントシステム。
【請求項18】
車両のレーダー内に設置された第1の水平方向傾きセンサから第1の水平傾きを受信し、車両のセンサクラスタ内に設置された第2の水平方向傾きセンサから第2の水平傾きを受信するステップと、
前記第1の水平傾き及び第2の水平傾きに基づいて、前記レーダーの水平方向へのミスアライメント可否を判断するステップと、
を含むことを特徴とする車両レーダーの水平方向へのアライメント方法。
【請求項19】
前記ミスアライメント可否を判断するステップが、
前記第1の水平傾きと第2の水平傾きとの間の差を算出するステップと、
前記第1の水平傾きと第2の水平傾きとの間の差が予め設定された水平傾きしきい値以上であるか否かを確認するステップと、
を含むことを特徴とする請求項18に記載の車両レーダーの水平方向へのアライメント方法。
【請求項20】
前記ミスアライメント可否の判断結果、ミスアライメントと判断された場合に警告するステップをさらに含むことを特徴とする請求項18または19に記載の車両レーダーの水平方向へのアライメント方法。
【請求項21】
前記ミスアライメント可否の判断結果、ミスアライメントと判断された場合、前記レーダーの水平方向への歪み角を補償するステップをさらに含むことを特徴とする請求項18または19に記載の車両レーダーの水平方向へのアライメント方法。
【請求項22】
前記歪み角を補償するステップが、前記レーダーの送信アンテナのアレイ因子を補償することにより、前記歪み角をソフトウェア的に補償したり、モータ駆動によって前記レーダーの歪み角を物理的に補償することでなされることを特徴とする請求項21に記載の車両レーダーの水平方向へのアライメント方法。
【請求項23】
車両のレーダー内に設置された第1の垂直方向傾きセンサから第1の垂直傾きを受信し、車両のセンサクラスタ内に設置された第2の垂直方向傾きセンサから第2の垂直傾きを受信するステップと、
前記第1の垂直傾き及び第2の垂直傾きに基づいて、前記レーダーの垂直方向へのミスアライメント可否を判断するステップと、
を含むことを特徴とする車両レーダーの垂直方向へのアライメント方法。
【請求項24】
前記ミスアライメント可否を判断するステップが、
前記第1の垂直傾きと第2の垂直傾きとの間の差を算出するステップと、
前記第1の垂直傾きと第2の垂直傾きとの間の差が予め設定された垂直傾きしきい値以上であるか否かを確認するステップと、
を含むことを特徴とする請求項23に記載の車両レーダーの垂直方向へのアライメント方法。
【請求項25】
前記ミスアライメント可否の判断結果、ミスアライメントと判断された場合に警告するステップをさらに含むことを特徴とする請求項23または24に記載の車両レーダーの垂直方向へのアライメント方法。
【請求項26】
前記ミスアライメント可否の判断結果、ミスアライメントと判断された場合、前記レーダーの垂直方向への歪み角を補償するステップをさらに含むことを特徴とする請求項23または24に記載の車両レーダーの垂直方向へのアライメント方法。
【請求項27】
前記歪み角を補償するステップが、前記レーダーの送信アンテナのアレイ因子を補償することにより、前記歪み角をソフトウェア的に補償したり、モータ駆動によって前記レーダーの歪み角を物理的に補償することでなされることを特徴とする請求項26に記載の車両レーダーの垂直方向へのアライメント方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2012−194169(P2012−194169A)
【公開日】平成24年10月11日(2012.10.11)
【国際特許分類】
【出願番号】特願2011−179972(P2011−179972)
【出願日】平成23年8月19日(2011.8.19)
【出願人】(507098483)ヒュンダイ・モービス・カンパニー・リミテッド (10)
【出願人】(511203787)サムスン タレス カンパニー リミテッド (1)
【Fターム(参考)】
【公開日】平成24年10月11日(2012.10.11)
【国際特許分類】
【出願日】平成23年8月19日(2011.8.19)
【出願人】(507098483)ヒュンダイ・モービス・カンパニー・リミテッド (10)
【出願人】(511203787)サムスン タレス カンパニー リミテッド (1)
【Fターム(参考)】
[ Back to top ]