
車両位置予測方法及び装置
【課題】GPS三次元測位が不能になった後三次元測位が再開されたとき、その間の勾配が大きくても正確な車両位置の選択が可能な車両位置予測方法及び装置とする。
【解決手段】GPSで三次元測位を行い車両位置を演算すると共に車両の走行履歴を保存し、走行履歴と車速データにより現在の車両位置から移動する可能性のある予測移動範囲を演算し、GPSによる三次元測位が行われないとき、二次元測位、或いはジャイロと車速信号により車両位置を予測する。GPS測位車両位置が前回演算した予測移動範囲に存在するときには、通常その車両位置を採用し、存在しないときには前記予測した車両位置を採用する。しかし、三次元測位から二次元測位等に切り替わり再度三次元測位を行うとき、その間の距離が所定以上で勾配が所定以上の時には、三次元測位再開時の測位地点が予測移動範囲に存在しないときでも三次元測位位置を選択し、以前の走行履歴を削除する。
【解決手段】GPSで三次元測位を行い車両位置を演算すると共に車両の走行履歴を保存し、走行履歴と車速データにより現在の車両位置から移動する可能性のある予測移動範囲を演算し、GPSによる三次元測位が行われないとき、二次元測位、或いはジャイロと車速信号により車両位置を予測する。GPS測位車両位置が前回演算した予測移動範囲に存在するときには、通常その車両位置を採用し、存在しないときには前記予測した車両位置を採用する。しかし、三次元測位から二次元測位等に切り替わり再度三次元測位を行うとき、その間の距離が所定以上で勾配が所定以上の時には、三次元測位再開時の測位地点が予測移動範囲に存在しないときでも三次元測位位置を選択し、以前の走行履歴を削除する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明はGPSを用いて車両位置を測位し、ジャイロと車速データを用いた自律航法による車両位置の測位によってGPS受信不良等による急激な位置飛びを防ぐ車両位置予測方法、及びその方法を実施する装置の改良技術に関する。
【背景技術】
【0002】
車両用ナビゲーション装置においては、自車両の位置を測定するに際して、車速信号や加速度センサ等から移動距離を算出し、角速度センサ等の方位検出センサから車両の回転角度を求め、常時移動方向と移動量を加算していく自律航法と、GPS(Global Positiong System)衛星 からの電波を受信して現在位置を検出するGPS航法とを用い、いずれか一つによる測位方法、或いは両航法を組み合わせたハイブリッド航法が用いられている。
【0003】
ナビゲーション装置においては上記のようにして得られた現在地と走行方向を地図画面上に表示するため、ナビゲーション装置が備えているDVD−ROM等の地図データ記憶媒体から現在地近傍の地図データを読み出し、モニタ画面にその電子地図を表示し、その地図上に自車位置を重ね合わせて表示している。また自車位置を地図上に表示するには、地図上の道路データと比較し、適当と考えられる道路上に自車位置を修正して表示するマップマッチング機能を有している。このようなマップマッチング機能においては、移動体の位置が確定した時に、候補となる道路が複数個ある場合、例えば、経路案内中の路線の優先度を高くする等、その中で最も存在確率が高い道路を選択する。
【0004】
上記のようなナビゲーション装置において、現在位置を正確に測定することは極めて重要であり、特に主として用いられるデータがGPS衛星の受信データであるときには、受信するGPSデータ自体が正確なものでなければならず、また測位のために必要とするGPS衛星の配置が適切でなければならない。近年の受信器技術においては、可視衛星を全て測位計算に使用する通称「オールインビュー」方式が主流となっており、全ての可視衛星の中で適切な衛星を選択して用いているが、車両の現在位置を車両が存在する場所の高さをも考慮して正確な位置を測定する3D測位を行うには、少なくとも4個の衛星を用いて位置計測を行う必要がある。
【0005】
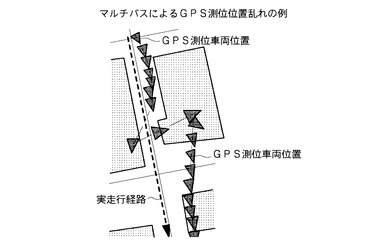
GPS衛星を用いた上記のような現在位置の測量に際しては、受信するGPSデータを含んでいる受信信号が正確なものでなければならないのに対して、そのGPS衛星からの信号はGPS衛星との距離や上空の雲などの障害物によって生じる信号減衰や、周囲の建物等の影響によるマルチパスノイズ発生により劣化する。このようなマルチパスノイズが入ると、例えば図10に示すように、GPS測位位置が大きく変化し、その後補正により次第に正常な位置に戻るまで、画面上に異常な表示がなされるため、利用者に不信感や違和感を感じさせてしまう問題があった。
【0006】
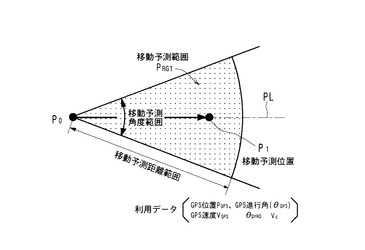
上記のような問題点を解決するため、本発明者等によって次のような技術を開発し特許出願を行っている。その技術の概要は図11に示すように、GPSデータにより得られるGPS位置PGPS、GPS進行角θGPS、GPS速度VGPS、ジャイロと距離パルスによる車速を用いた自律航法における進行角θGYRO、及びVc等のデータを用い、P0の位置から車両が走行する可能性のある移動予測角度範囲と移動予測距離範囲によって移動予測位置、及び移動予測範囲PRG1を求める。
【0007】
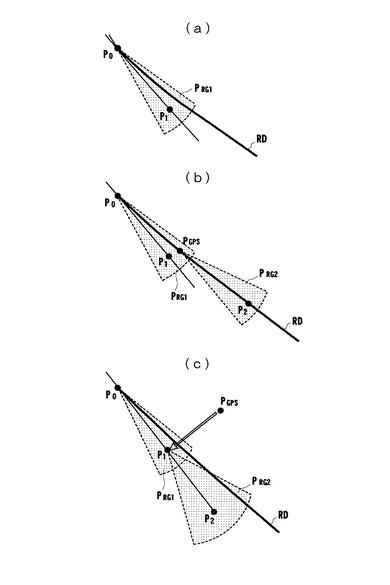
この移動予測位置、及び移動予測範囲を求める手法により、図12に示すような作動を行う。即ち、図12(a)に示すように、時刻T0における位置P0からの移動予測位置P1と移動予測範囲PRG1が得られたとき、同図(b)に示すようにGPSによる測位位置PGPSが移動予測範囲PRG1内に含まれているときは、GPS測位データが正しいものとして、その位置から次の移動予測位置P2、及び移動予測範囲PRG2を前記と同様に演算する。また、例えば同図(c)に示すように、P0の位置から移動予測位置P1が得られ、移動予測範囲PRG1が得られているとき、GPSによる測位位置PGPSがマルチパス等の影響で移動予測範囲PRG1の範囲外に存在するとき、このGPS位置は不適切なデータであるとして、先に演算した移動予測位置P1がより正しい位置であるとして採用し、この位置から次の移動予測位置P2及び移動予測範囲PRG2を演算する。
【0008】
一方、前記のように4個の衛星を用いて正確な位置計測を行っているときでも、途中で3個の衛星のみを用いて位置計測を行わなければならないときがあり、そのようなときには高さを計算することができない2D測位しか行うことができないので、2D測位を行うことになった直前の衛星4個を用いて高さ測位を含めた3D測位を行っていたときの高さデータを用い、高さがその後変化しないものとして、その高さでの水平面(X−Y)の2D測位演算を行っている。
【0009】
なお、走行中に三次元測位ができなくなった後、三次元測位時の高度データを利用した二次元測位データを採用し、推測航法や地図マッチング航法等により得られた車両位置をより正確な位置に補正するとき、二次元測位に切り替わった後に道路の標高の変化があっても、正確な車両の位置補正を可能にするため、二次元測位に切り替わった後一定距離を走破するまでは、二次元測位データに基づく位置検出データを採用し、一定距離を走破した後は、二次元測位データに基づく位置検出データは採用しないようにした技術は特許文献1に記載されている。
【0010】
また、より実用的な推定誤差を得ることができるGPS受信器とするために、最後に三次元測位できたときの高度データ及び高度誤差データを記憶するとともに、外部から入力される高度データ及び高度誤差データを記憶し、実測でデータの第1経過時間に基づいて第1誤差を算出し、外部データの記憶値の第2経過時間に基づいて第2誤差を算出し、第1誤差と第2誤差とを比較して誤差の少ないデータを二次元測位時の高度データ及び高度誤差データとする技術は特許文献2に記載されている。
【特許文献1】特開平4−353783号公報
【特許文献2】特開2002−341012号公報
【発明の開示】
【発明が解決しようとする課題】
【0011】
上記のように、GPS衛星のデータによって三次元測位を行っているときでも、マルチパス等の影響で本来あるべきでないデータに基づく位置を測位し表示する問題を解決するため、常に現在の車速等によって現在地から次の測定時にとりうる範囲を計算し、その範囲にないときにはその範囲内のデータを用いる技術を提案しているが、その技術においても前記のように、三次元測位から二次元測位に切り替わったときに高さの計算を行うことができなくなっても、先の高さと同じとして二次元測位を行うこととなる。
【0012】
その際に、三次元測位から二次元測位に切り替わった地点から再度三次元測位が可能となった地点まで高度差が少ない場合は良いが、実際にはその2D測位期間中においても高さが大きく変化することも多く、且つその2D測位期間が長いと2D測位によるデータでは現在位置から更に遠ざかることとなる。このようなときに、本来は再開したときの3D測位の位置データが正しいにもかかわらず、2D測位データに基づく予測移動範囲が正しいものとして、その範囲内に補正してしまうと、その後の3D測位データについても徐々に正しい位置に修正されるものの、暫くの間は不適切な位置表示がなされることとなり、利用者に違和感や不信感を抱かせることとなる。
【0013】
したがって本発明は、現在地から次の測定時にとりうる範囲を求め、その範囲にないときにはその範囲内のデータを用いる車両位置予測手法において、三次元測位から二次元測位に切り替わり、その後再度三次元測位が可能となった時、その間の勾配が所定より大きいときでも、常に正確な車両位置を予測することができるようにした車両位置予測方法及び装置を提供することを主たる目的とする。
【課題を解決するための手段】
【0014】
本発明に係る車両位置予測方法は、GPS衛星より受信したGPS受信信号による三次元測位を行い車両位置を演算すると共に車両の走行履歴を保存し、前記走行履歴と車速データを用いて現在の車両位置から移動する可能性のある予測移動範囲を演算し、前記GPS受信信号により三次元測位が行われないとき、GPSによる二次元測位により、或いはジャイロと車速信号により車両位置を予測し、前記GPSで測位した車両位置が前回演算した予測移動範囲に存在するときには該車両位置を採用し、存在しないときには前記予測した車両位置を採用し、前記三次元測位を行っているとき、車両位置に対応する高度データを前回のデータと共に保存し、前記三次元測位が行われないときから再度三次元測位が可能となったとき、三次元測位が行われなくなった最後の車両位置の高度と、三次元測位が再開されたときの最初の車両位置の高度との差、及びそれらの車両位置間の距離により、該車両位置間の勾配を演算し、前記演算した勾配が所定以上の時、前記再度三次元測位が可能となったときのGPS測位による車両位置が、前記予測移動範囲内に存在しないときには、GPS測位による車両位置を選択することを特徴とする。
【0015】
本発明に係る他の車両位置予測方法は、前記車両位置予測方法において、前記演算した勾配が所定以上の時に、GPS測位による車両位置を選択するときには、保存した走行履歴を全て削除し、新たな走行履歴の更新を行うことを特徴とする。
【0016】
本発明に係る他の車両位置予測方法は、前記車両位置予測方法において、前記GPS測位による車両位置が予測移動範囲内にないときに行うGPS測位による車両位置の選択は、前記三次元測位が行われなくなった地点と三次元測位が再開された地点の距離が所定以上の時に行うことを特徴とする。
【0017】
本発明に係る車両位置予測装置は、GPS衛星より受信したGPS受信信号による三次元測位を行い車両位置を演算するGPS三次元測位手段と、車両の走行履歴を保存する走行履歴保存手段と、前記走行履歴と車速データを用いて現在の車両位置から移動する可能性のある範囲を演算する予測移動範囲演算手段と、前記GPS受信信号により三次元測位が行われないとき、GPSによる二次元測位により、或いはジャイロと車速信号により車両位置を予測する予測位置演算手段と、前記GPS三次元測位手段で測位した車両位置が、前記予測移動範囲演算手段で前回演算した予測移動範囲に存在するときには該車両位置を採用し、存在しないときには前記予測位置演算手段により予測した車両位置を採用する車両位置選択手段と、前記三次元測位を行っているとき、車両位置に対応する高度データを前回のデータと共に保存する高度データ保存手段と、前記三次元測位が行われないときから再度三次元測位が可能となったとき、三次元測位が行われなくなった最後の車両位置の高度と、三次元測位が再開されたときの最初の車両位置の高度との差、及びそれらの車両位置間の距離により、該車両位置間の勾配を演算する勾配演算手段と、前記勾配演算手段で演算した勾配が所定以上の時、前記再度三次元測位が可能となったときのGPS測位による車両位置が、前記予測移動範囲演算手段で演算した予測移動範囲内に存在しないときには、GPS測位による車両位置を選択する車両位置選択手段とを備えたことを特徴とする。
【0018】
本発明に係る他の車両位置予測装置は、前記車両位置予測装置において、前記走行履歴保存手段は、前記勾配演算手段で演算した勾配が所定以上の時に、GPS測位による車両位置を選択するときには、保存した走行履歴を全て削除し、新たな走行履歴を保存することを特徴とする。
【0019】
本発明に係る他の車両位置予測装置は、前記車両位置予測装置において、前記車両位置選択手段は、前記三次元測位が行われなくなった地点と三次元測位が再開された地点の距離が所定以上の時に、GPS測位による車両位置の選択を行うことを特徴とする。
【発明の効果】
【0020】
本発明は上記のように構成したので、現在地から次の測定時にとりうる予測移動範囲を求め、その範囲にないときにはその範囲内に設定する車両位置予測手法を用いる時において、三次元測位から二次元測位或いは自律航法による測位に切り替わった後に再度三次元が可能になったとき、二次元測位或いは自律航法測位を行っていた地点間の勾配が大きいときにでも、正確な車両位置の選択を行うことができ、その後の車両位置も正確に得ることができるようになる。
【発明を実施するための最良の形態】
【0021】
本発明は、GPSによる三次元測位から二次元測位或いは自律航法による測位に切り替わった後に再度三次元が可能になったとき、二次元測位或いは自律航法測位を行っていた地点間の勾配が大きいときにでも、正確な車両位置の選択を行うという目的を、GPS衛星より受信したGPS受信信号による三次元測位を行い車両位置を演算すると共に車両の走行履歴を保存し、前記走行履歴と車速データを用いて現在の車両位置から移動する可能性のある予測移動範囲を演算し、前記GPS受信信号により三次元測位が行われないとき、GPSによる二次元測位により、或いはジャイロと車速信号により車両位置を予測し、前記GPSで測位した車両位置が前回演算した予測移動範囲に存在するときには該車両位置を採用し、存在しないときには前記予測した車両位置を採用し、前記三次元測位を行っているとき、車両位置に対応する高度データを前回のデータと共に保存し、前記三次元測位が行われないときから再度三次元測位が可能となったとき、三次元測位が行われなくなった最後の車両位置の高度と、三次元測位が再開されたときの最初の車両位置の高度との差、及びそれらの車両位置間の距離により、該車両位置間の勾配を演算し、前記演算した勾配が所定以上の時、前記再度三次元測位が可能となったときのGPS測位による車両位置が、前記予測移動範囲内に存在しないときには、GPS測位による車両位置を選択することにより実現した。
【実施例1】
【0022】
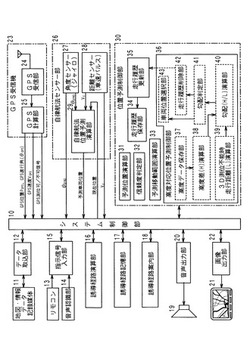
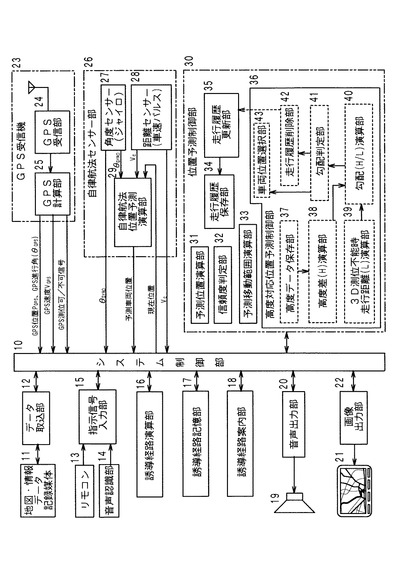
本発明の実施例を図面に沿って説明する。本発明については、先に本件発明者等により出願した発明の改良技術に相当するが、本件出願時点で未だ公知ではないため、本件発明の説明に必要な部分は重複して説明する。本発明による車両位置予測装置は、図1の機能ブロックからなる車両用ナビゲーション装置における自車両の位置を予測する位置予測制御部30において、他の機能部と関連しながらシステム制御部10のソフトウエアによって行われる。なお、図1において各機能を行う機能部は、各機能を行う手段とも言うことができる。
【0023】
図1に示すナビゲーション装置においては、従来のものと同様に、システム制御部10に各種の所定の機能を総合的に行うためのソフトウェアを記録したROM、そのソフトウェアを処理するためのCPU及びRAM等を備え、これと接続した各機能部を関連づけて総合的に制御している。図示のナビゲーション装置においては、このシステム制御部10に、CD−ROM、DVD−ROM、或いはハードディスク等の地図・情報データ記録媒体11から必要な地図データ、施設情報等を取り込むデータ取込部12を備えている。
【0024】
指示信号入力部15においては、このナビゲーション装置での利用者によるリモコン13やタッチパネル等の指示信号を入力している。更に必要に応じて利用者の音声を認識する処理によって利用者の指示信号を入力する音声認識部14の信号も、この指示信号入力部15に入力している。誘導経路演算部16では、利用者が種々の手法で入力した目的地と、GPS等によって得られる後述するような車両位置との間の誘導経路を演算し、誘導経路記憶部17では種々の条件で提示した誘導経路の中から利用者が選択した1つの誘導経路を記憶し、誘導経路案内部18では記憶した誘導経路に沿って車両が安全に走行できるように、音声出力部20によりスピーカ19から音声により、また画像出力部22からモニタ21に表示して案内を行う。
【0025】
GPS受信機23においては、GPS衛星から送られてくるGPS信号を受信し、車両の絶対的現在位置(GPS位置)や進行方向を算出すると共に、ドプラーシフトを利用して車両速度(GPS速度)を算出し、またGPS測位に使用できる衛星の数が4個以上であることにより高さを含めた測位としての3D測位が可能か、3個の衛星しか用いることができないことにより2D測位のみを行うか、或いは更に2個以下、更には1個も利用できない等の、GPS測位可、不可信号も出力する。
【0026】
自律航法センサー部26は、所定時間毎にジャイロを用いて走行方向を検出する角度センサー27と、車両の車速パルスから走行距離及び車速を検出する距離センサ28とを備えている。自律航法位置予測演算部29では、角度センサー27からの走行方位信号と、車速パルスを用いる距離センサー28からの車速信号と、更に必要に応じてGPS受信機で測定した現在位置信号を入力し、特にGPSが3D測位中でもマルチパス等による突然の異常信号により現在位置が別の位置に飛ばないように予測移動範囲設定のために、また3D測位から2D測位になったときの現在位置測位のデータのために、更にトンネル内等のGPS受信不能時における予測車両位置データのために利用する。この自律航法位置予測演算部29で得たデータは、主として後述する位置予測制御部30において用いられる。
【0027】
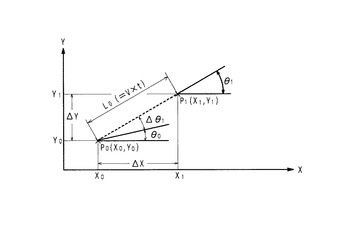
自律航法位置予測演算に際しては図6に示すように、基準方位(θ=0)をX軸の正方向、基準方位から反時計方向回りを+方向とするとき、前回の車両位置を点P0(X0,Y0)、点P0での車両進行方向の絶対方位をθ0、単位時間t後の移動距離L0(=V×t)移動した時点での相対方位センサーの出力をΔθ1であるとすると、車両位置の変化分は、
ΔX=L0・cos(θ0+Δθ1)
ΔY=L0・sin(θ0+Δθ1)
となり、今回の点P1での車両進行方向の堆定方位θ1と堆定車両位置(X1,Y1)は、 θ1=θ0+Δθ1 (1)
X1=X0+ΔX=X0+L0・cosθ1 (2)
Y1=Y0+ΔY=Y0+L0・sinθ1 (3)
としてベクトル合成により、次回演算時の予測位置の計算ができる。
【0028】
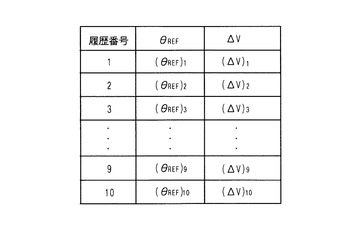
位置予測制御部30には予測位置演算部31を備え、前記のような自律航法センサー部26の各種データと、GPS受信機23のデータ等を用いて、前記図11に示すような手法により、或いは後に詳述する手法により所定時間後に走行している位置の予測を行う。また信頼度判定部32では、後述する手法によりGPSデータの信頼度を判定し、その信頼度の程度に応じた現在位置予測制御等の制御を行う。また予測移動範囲演算部33では、後述する手法により予測移動範囲の演算を行う。また、位置予測制御部30には後に詳述するように、走行履歴保存部34を備え、車両進行方向と共に、GPS速度と自律航法センサー部で検出された車速との差ΔVを走行履歴情報として保存する。このデータは走行履歴更新部35によって更新しながら、走行履歴情報を最新の複数個、例えば図7に示すようなデータについて10個等の、適宜の数の履歴を記憶する。
【0029】
更に、位置予測制御部30には、GPSによる3D測位ができなくなってから、それ以降3D測位可能になったとき迄の走行中における高度差に対応した位置予測制御を行うための、高度対応位置予測制御部36を備えている。高度対応位置予測制御部36には高度データ保存部37を備え、GPSにより3D測位が可能なときに、現在測定した高度データと、前回測定した高度データとを保存している。高度差演算部38では、GPSによる3D測位ができなくなった後に3D測位が再開できるようになったときの高度データと、その時に高度データ保存部36に保存している最後に3D測位を行った時の高度データとにより高度差を演算する。また、3D測位不能時走行距離演算部39では、前記のように3D測位不能となったときから、その後3D測位可能となったときの走行距離を積算して演算する。
【0030】
高度対応位置予測制御部36における勾配演算部40では、前記高度差演算部38で演算した3D測位不能時から3D測位可能時迄の高度差Hと、3D測位不能時走行距離演算部39で演算した距離Lとにより、3D測位不能期間中の勾配(H/L)を演算する。また、勾配判定部41では勾配演算部40で演算した勾配が所定以上の勾配であるか否かを判別する。ここで所定以上の勾配であると判別したときには、車両位置選択部43により、GPSによる3D測位可能になったときのGPS測位位置が、GPSによる2D測位、或いは自律航法位置予測演算部29による位置予測による予測範囲以外に存在するときでも、3Dによる測位位置を車両位置とする出力を行う。それによって、2D測位等による位置予測が大きな高度差によって次第に誤差が大きくなり、3D測位再開時にそのデータを用いることによる測位の不都合を回避する。このとき、走行履歴削除部42は、走行履歴更新部35に対して3D測位再開までの走行履歴は不適切なものとして、走行履歴保存部34内の履歴データを全て削除し、新たな走行履歴の更新を行うように指示する。
【0031】
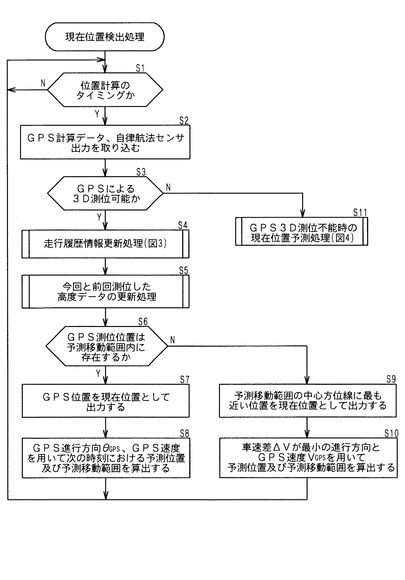
上記のような機能ブロックからなる本発明においては、例えば図2〜図5に示す作動フローにより作動させることができる。以下これらの作動フローを図1の機能ブロック図、及び図8以降の説明図等を参照しつつ説明する。図2に示す現在位置検出処理の作動フローにおいては、最初に所定時間毎に設定した位置計算のタイミングになったか否かを判別し(ステップS1)、位置計算タイミンクになったときには、予測位置演算部31はGPS受信機23よリGPS計算データ(GPS位置PGPS、GPS速度VGPS、GPS進行方向θGPS、GPS測位状態信号を取得し、更に自律航法センサー部26より進行方向変化θGYROや車速Vcを取得する(ステップS2)。
【0032】
図2の作動フローにおいては、次いでGPSによる3D測位が可能であるか否かを判別する(ステップS3)。この判別は、図1のGPS受信機23におけるGPS計算部25から得られる、GPS測位可/不可信号を用い、位置予測制御部30の信頼度判定部32において判別する。即ち、信頼度判定部32においては、この処理に際して、GPS受信機において少なくとも4個の衛星を用いることにより3D測位を行うことができるか否かをチェックする。その結果3D測位が可能ではないと判別したときには、ステップS11において図4に示すような、特に本発明の特徴とするGPSによる3D測位不能時の現在位置予測処理を行う。
【0033】
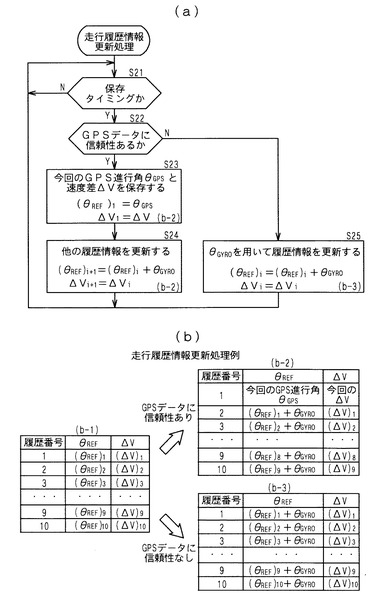
ステップS3においてGPSによる3D測位が可能であると判別したときには、走行履歴情報の更新処理を行う(ステップS4)。この処理は例えば図3(a)に示す作動フローに従い、同図(b)に示す走行履歴情報更新処理例のような処理を行う。図3(a)に示す走行履歴情報更新処理の例においては、最初走行履歴保存タイミンクになったか、即ち、位置測定タイミンクになったか監視し(ステップS21)、そのタイミンクになったときGPSデータに信頼性があるかチェックする(ステップS22)。GPSデータに信頼性があるか否かは、信頼度判定部32が測定し、測定結果について走行履歴更新部35に入力する。
【0034】
このとき信頼度判定部32においては、
(1)GPS受信信号による位置測定が可能か、
(2)GPS受信信号より得られる車速が1km/h以上であるか、
(3)GPS受信信号より得られるGPS進行方向の変化と角度センサー27から得られる進行方向変化θGYROの差が設定値以上になったか、
(4)前記進行方向変化θGYROの変化が設定値以上になったか否か、
を判定し監視する。
【0035】
その判定、監視結果により、
(1)GPS受信信号による位置測定ができない。
(2)GPS衛星から受信した信号より得られる車速が1km/h以下になっている。
(3)GPS進行方向の変化と前記進行方向変化θGYROの差が設定値以上になっている。
(4)前記進行方向変化θGYROの変化が設定値以上になっている。
のいずれかが成立したとき、GPS位置に信頼性がないと判定する。またそれらとは逆に、GPS受信信号による位置測定ができ、GPS衛星から受信した信号より得られる車速か1km/hより大きく、GPS進行方向の変化と前記進行方向変化θGYROの差が設定値より小さく、前記進行方向変化θGYROの変化が設定値より小さいときに、GPS位置に信頼性かあると判定する。なお、ここで行われるGPS受信信号による位置測位ができるか否かの判別に際しては、3D測位以外に2D測位でも測位が行われれば、GPS測位が可能と判別することもできる。
【0036】
走行履歴更新部35は、GPSデータに信頼性があれば図3(b)に示すように、GPS受信信号より求まる最新のGPS進行方向θGPSを前記進行方向履歴保存部に保存すると共に、GPS受信信号より得られるGPS速度と距離センサー28により得られる車速との差ΔVを保存する(ステップS23)。即ち、次式
(θREF)1=θGPS
ΔV1=ΔV
の更新処理を行う。
【0037】
その後走行履歴更新部35は、一番古い進行方向履歴情報を除去し、かつ、残りの進行方向履歴情報に角度センサーから求まる進行方向変化θGYROを加算して進行方向履歴情報を更新する(ステップS24)。即ち、次式
(θREF)i+1=(θREF)i+θGYRO
ΔVi+1=ΔVi
の更新処理を行い、図3(b−2)のデータを得る。以上により、10組の進行方向は全て現時点における車両進行方向となるように更新される。
【0038】
一方、ステップS22において、GPSデータに信頼性がないと判別したときには、走行履歴保存部34に保存されている全進行方向履歴情報に、前記進行方向変化θGYROを加算して進行方向履歴情報を更新する(ステップS25)。なお、このときは車速差は変更しない。即ち、次式
(θREF)i=(θREF)i+θGYRO
ΔVi=ΔVi
の更新処理を行い図3(b−3)のデータを得る。これにより、GPSデータに信頼性がある場合と同様に10組の進行方向は全て現時点における車両進行方向となるように更新される。
【0039】
図2に示す実施例においては、ステップS4の前記走行履歴情報更新処理に次いで、今回と前回測位した高度データの更新処理を行う(ステップS5)。この処理は図1の高度対応位置予測制御部36における高度データ保存部37において行われる。この処理においては、高度データ保存部37に今回と前回のデータのみを保存するメモリを設け、新しいデータが入る毎に逐次更新してそのデータを記憶する。それにより、後述するようにその後3D測位ができなくなり、更にその後3D測位が可能となったとき、3D測位が可能となった時点の高度データと、その前のデータである3D測位ができなくなることによりステップS3でステップS11に進むとき、ステップS5で保存したデータが残り、上記3D測位が再開されたときに、図1の高度差演算部38で両データによって高度差を演算することが可能となる。
【0040】
その後GPSで測位した位置は前回予測した予測移動範囲内に存在するか否かを判別する(ステップS6)。この判別に際しては、前回の位置測定タイミングにおいて後述するステップS8、ステップS10等で設定された予測移動範囲内に、GPS測位位置が存在するか否かを検出することにより行われる。この判別の結果、GPS測位位置が予測移動範囲内に存在すると判別したときには、GPS位置を現在位置として出力し(ステップS7)、GPS進行方向θGPS、GPS速度を用いて次の時刻における予測位置及び予測移動範囲を算出する。
【0041】
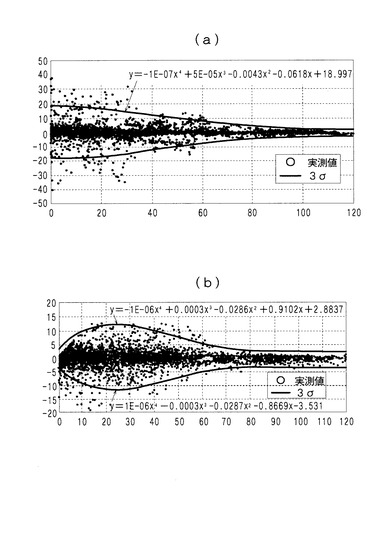
前記ステップS8の予測移動範囲の算出処理に際しては、この実施例においては図8に示すような車両特有の走行特性データを用いる。即ち図8(a)に示すように、車両の実際の走行速度と、その速度における方向の変更状態としての角速度との関係の実測値を多数測定して図のようにプロットし、それにより所定の速度における角速度が生じる標準偏差値をとると、99.7%の確率で存在する値である3σの範囲は、図示するような式で表される上側の線と、これとプラスマイナス逆にした下側の線とで挟まれた範囲であることがわかる。
【0042】
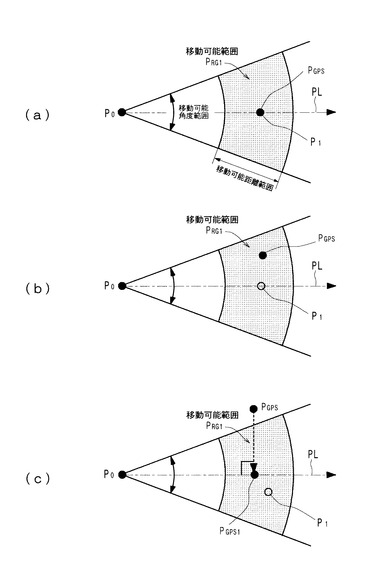
同様に、図8(b)に示すように、車両の実際の走行速度と、その速度における車両が加速する程度の関係の実測値を多数測定して図のようにプロットし、それにより所定の速度における加速度が生じる標準偏差値をとると、3σの範囲は同図に示すような式で表される上側の線と同様の下側の線の範囲内であることがわかる。それにより、例えば図9に示すように車両の現在位置がP0の時、GPSデータにより得られる車速、或いは車両データとしての車速を用い、P0の位置から車両が走行する可能性のある移動可能角度範囲を前記図8(a)の関係式から求め、同様にP0の位置から車両が走行している可能性のある移動可能距離範囲を同図(b)の関係式から求めることができ、その結果図9の予測移動範囲PRG1が得られる。図9(a)にはこの予測移動範囲PRG1内の中心部近傍で、中心方位PL上にGPSによる3D測位位置PGPSが存在し、予測移動位置P1も存在する理想的な例を示している。
【0043】
図9(b)には同図(a)の状態でGPSによる測位が行われ、その位置PGPSが予測移動位置P1とは異なる位置ではあるが、移動可能範囲PRG1内に含まれている状態を示している。このような状態の時、前記ステップS6において、GPS測位位置は予測移動範囲内に存在すると判別し、ステップS7においてこのGPS位置PGPSを現在位置として出力することとなる。なお、予測移動範囲の設定に際しては前記の手法に対して、例えば道路を常に含むように予測範囲を調節する等の他の手法を加えて予測しても良く、更に図11で説明した先の出願の実施例のように別の手法によって行っても良い。
【0044】
またステップS8における予測位置の算出に際しては、例えば図1の自律航法位置予測演算部29において、距離センサー28で車両が所定距離走行する毎にパルスを出力し、したがつて単位時間当たりに発生するパルス数を計数することにより車両移動速度Vcを測定でき、またGPSのドプラーシフトデータによりVGPSとして得ることもできる。
【0045】
図2に示す例においては、ステップS6において、例えば前記のようなマルチパスノイズ等によって図9(c)のPGPSのように、予測移動範囲PRG1の範囲に存在しないときには、GPS測位位置が前回算出時の予測移動範囲の中心方位線に最も近い位置を現在位置として出力する。即ち、図9(c)に示すように、予測移動範囲PRG1の範囲外に存在するGPS測位位置PGPSについて、予測移動範囲PRG1の中心方位線PLにこれを投射した位置であり、換言すると、GPS測位位置PGPSが中心方位線PLに最も近い位置であるPGPS1を現在位置とする。なお、このような現在位置の補正手法に代えて先の出願のように、予測位置或いは自律航法予測位置を現在位置として出力することもできる。その後、車速差ΔVが最小の進行方向とGPS速度VGPSを用いて、次の時刻における予測位置及び予測移動範囲を算出する(ステップS10)。
【0046】
ここで使用する車両進行方向θとしては、走行履歴保存部34に保存されている10組の進行方向履歴データのうち、車速差ΔVが最も小さい組の車両進行方向を選ぶ。これは、GPS速度VGPSと車速センサーより得られた速度Vcとの差が最小のときに最も進行方向データの信頼度が高くなるからである。なお、GPS速度VGPSはドプラーシフトに基づいて検出されるためGPS位置に信頼性かなくても精度は高い。その後は前記ステップS8と共にステップS1に戻って前記作動を繰り返す。なお、ステップS10における予測位置及び予測移動範囲の算出は、ステップS8とほぼ同様の手法により行うので、ここでの説明は省略する。
【0047】
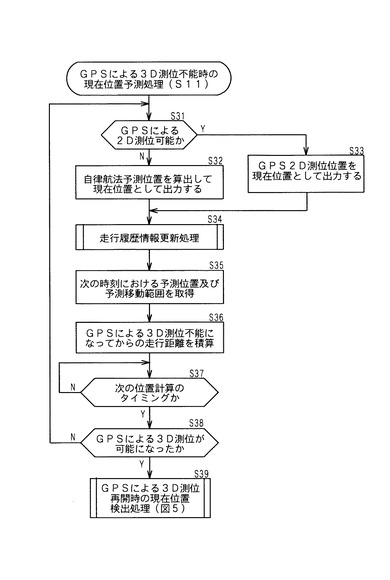
一方、図2のステップS3において、GPSによる3D測位が不可能と判別した場合にはステップS11に進み、図4及びそれに続く図5に示すような処理を行う。即ち図4に示すGPSによる3D測位不能時の現在位置予測処理の例においては、最初にGPSによる2D測位が可能であるか否かを判別する(ステップS31)。ここでGPSによる3D測位が不能であっても2D測位は可能であると判別したときには、ステップS33においてGPSによる2D測位位置を現在位置として出力する。
【0048】
また、例えばトンネル内に入ったときのように、GPSによる2D測位も不能であるときには、先に演算した自律航法による予測位置を算出して現在位置として出力する(ステップS32)。前記ステップS32及びS33において現在位置が出力された後は、走行履歴情報の更新処理を行う(ステップS34)。ここでの走行履歴情報の更新処理は、前記図3における走行履歴情報更新処理において、ステップS22におけるGPSデータに信頼性があるか否かの判別で信頼性がないと判別され、ステップS25におけるθGYROを用いて履歴情報を更新する処理を行い、図3(b−3)の例のような更新処理を行う。その後、次の時刻における予測位置及び予測移動範囲を取得する(ステップS35)。この処理においては主として自律航法によるデータによって予測位置及び予測移動範囲の取得が行われるが、GPSが一つでも受信可能なときにはGPSデータを利用することもできる。
【0049】
次いで図3の実施例においてはGPSによる3D測位が不能になってからの走行距離の積算を行う(ステップS36)。この積算により後述するようなGPSによる3D測位が可能に立ったときにおいて、例えば500m等の所定の距離数以上走行したか否かを判別可能となる。その後次の位置計算のタイミングになったか否かを判別し(ステップS37)、未だそのタイミングになっていないときはこの作動を繰り返して待機する。次の位置計算のタイミングになったと判別したときには、GPSによる3D測位が可能になったか否かの判別を行い、未だGPSによる3D測位が不能のときには、ステップS31に戻って前記作動を繰り返す。その後GPSによる3D測位が可能となったときには、図5に示すGPSによる3D測位再開時の現在位置検出処理を行う(ステップS39)。
【0050】
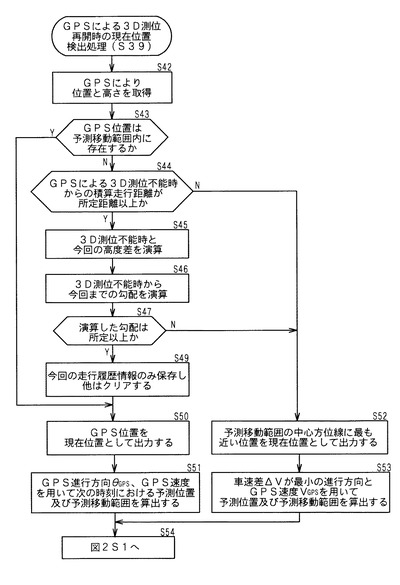
図5に示すGPSによる3D測位再開時の現在位置検出処理においては、最初にGPSにより現在位置とその位置の高さを取得する(ステップS42)。次いでGPS位置は予測移動範囲内に存在するか否かを判別する(ステップS43)。ここでGPS位置が予測移動範囲内に存在していないと判別したときには、GPSによる3D測位不能時からの積算走行距離が500m等の所定距離以上か否かを判別する(ステップS44)。この判別に際しては、前記図4のステップS36において、GPSによる3D測位不能になってからの走行距離の積算を行ったデータを用いる。この積算処理は、図1の高度対応位置予測制御部36における3D測位不能時走行距離演算部39において行っている。
【0051】
ステップS44においてGPSによる3D測位不能時からの積算走行距離が500m等の所定距離以上であると判別したときには、3D測位不能時と今回の高度差を演算する(ステップS45)。次いで3D測位不能時から今回までの勾配を演算する(ステップS46)。この処理は図1の高度対応位置予測制御部36における勾配演算部40で行う。その後、演算した勾配は所定以上か否かを判別する(ステップS47)。
【0052】
その判別の結果、勾配が所定以上であると判別したときには、今回の走行履歴情報のみ保存し、他はクリアする(ステップS49)。即ち、前記ステップS44でGPSによる3D測位不能時からの積算走行距離が例えば500m等の所定距離以上走行することによって2D測位の連続、或いはGPS測位無しによる自律航法測位の連続によって、誤差が積算して大きくなるとともに、ステップS47でその走行期間中の勾配が所定以上であることにより、高度差に伴う誤差が大きくなるため、GPSによる3D測位の位置が予測移動範囲内にない場合でも、GPSによる3D測位位置の方が正しい位置を示していると判断する。
【0053】
また、その判断に関連して、このステップS49においてそれまでの走行履歴情報は誤差が大きくなっていると判断し、それらの走行履歴情報を削除し、今回再開されたGPSによる3D測位のデータから正しいデータであるとし、これを最初の走行履歴情報として記憶する。それ以降は前記のような手法により、順にデータを蓄積し、更に更新していくこととなる。次いで、前記ステップS43においてGPS位置は予測移動範囲内に存在すると判別したときと共に、GPS位置を現在位置として出力する(ステップS50)。
【0054】
また、前記ステップS44においてGPSによる3D測位不能時からの積算走行距離が500m等の所定距離以上ではないと判別したとき、及びステップS47において演算した勾配は所定以上ではないと判別したときには、3D測位を行うことができなかった走行区間は比較的短く、或いはその間の勾配は測位誤差を問題にする程は大きくないと判断し、前記図2のステップS9と同様に、予測移動範囲の中心方位線に最も近い位置を現在位置として出力する(ステップS52)。その後前記ステップS10と同様に、車速差ΔVが最小の進行方向とGPS速度VGPSを用いて予測位置及び予測移動範囲の算出を行う(ステップS10)。以降は前記ステップS51と同様に、再び図2のステップS1に戻って前記作動を繰り返す。
【0055】
本発明においてはこのような処理を行うことにより、GPSによる3D測位が行われている途中でその3D測位が不能となり、その後再びGPSによる3D測位が可能となったとき、3D測位が不能であった期間の勾配が所定より大きいとき、その期間に行っていた2D測位や自律航法による現在位置の予測が不正確になっており、その際にはGPSによる3D測位位置が予測範囲に入っていない場合でも、GPSによる3D測位の位置が正しいものとして現在位置を出力することができるようになる。しかも3D測位が上記のようにして再開されたときには、それまで蓄積していた走行履歴情報を削除し、新たな蓄積を開始することにより、誤ったデータの利用による現在位置のずれの長期間継続を防止することができるようになる。
【図面の簡単な説明】
【0056】
【図1】本発明の実施例の機能ブロック図である。
【図2】同実施例の作動フロー図である。
【図3】図2の作動フローにおける走行履歴情報更新処理部分の作動フロー図である。
【図4】図2の作動フローにおけるGPSによる3D測位不能時の現在位置予測処理部分の作動フロー図である。
【図5】図4の作動フローにおけるGPSによる3D測位再開時の現在位置検出処理部分の作動フロー図である。
【図6】車両位置予測処理を示す図である。
【図7】走行履歴データの例を示す図である。
【図8】予測移動範囲の算出処理に用いる車両特有の走行特性データの例を示す図である。
【図9】予測移動範囲、及びGPS測位現在位置との関係を示す図である。
【図10】従来のGPS測位におけるマルチパス等の影響による測位位置の変化例を示す図である。
【図11】先に提案した自律航法による移動予測範囲の設定と、移動予測位置の例を示す図である。
【図12】先に提案した車両位置予測と予測移動範囲、及びGPS測位データの関係を示す図である。
【符号の説明】
【0057】
10 システム制御部
23 GPS受信機
24 GPS受信部
25 GPS計算部
26 自律航法センサー部
27 角度センサー
28 距離センサー
29 自律航法位置予測演算部
30 位置予測制御部
31 予測位置演算部
32 信頼度判定部
33 予測移動範囲演算部
34 走行履歴保存部
35 走行履歴更新部
36 高度対応位置予測制御部
37 高度データ保存部
38 高度差演算部
39 3D測位不能時走行距離演算部
40 勾配演算部
41 勾配判定部
42 走行履歴削除部
43 車両位置選択部
【技術分野】
【0001】
本発明はGPSを用いて車両位置を測位し、ジャイロと車速データを用いた自律航法による車両位置の測位によってGPS受信不良等による急激な位置飛びを防ぐ車両位置予測方法、及びその方法を実施する装置の改良技術に関する。
【背景技術】
【0002】
車両用ナビゲーション装置においては、自車両の位置を測定するに際して、車速信号や加速度センサ等から移動距離を算出し、角速度センサ等の方位検出センサから車両の回転角度を求め、常時移動方向と移動量を加算していく自律航法と、GPS(Global Positiong System)衛星 からの電波を受信して現在位置を検出するGPS航法とを用い、いずれか一つによる測位方法、或いは両航法を組み合わせたハイブリッド航法が用いられている。
【0003】
ナビゲーション装置においては上記のようにして得られた現在地と走行方向を地図画面上に表示するため、ナビゲーション装置が備えているDVD−ROM等の地図データ記憶媒体から現在地近傍の地図データを読み出し、モニタ画面にその電子地図を表示し、その地図上に自車位置を重ね合わせて表示している。また自車位置を地図上に表示するには、地図上の道路データと比較し、適当と考えられる道路上に自車位置を修正して表示するマップマッチング機能を有している。このようなマップマッチング機能においては、移動体の位置が確定した時に、候補となる道路が複数個ある場合、例えば、経路案内中の路線の優先度を高くする等、その中で最も存在確率が高い道路を選択する。
【0004】
上記のようなナビゲーション装置において、現在位置を正確に測定することは極めて重要であり、特に主として用いられるデータがGPS衛星の受信データであるときには、受信するGPSデータ自体が正確なものでなければならず、また測位のために必要とするGPS衛星の配置が適切でなければならない。近年の受信器技術においては、可視衛星を全て測位計算に使用する通称「オールインビュー」方式が主流となっており、全ての可視衛星の中で適切な衛星を選択して用いているが、車両の現在位置を車両が存在する場所の高さをも考慮して正確な位置を測定する3D測位を行うには、少なくとも4個の衛星を用いて位置計測を行う必要がある。
【0005】
GPS衛星を用いた上記のような現在位置の測量に際しては、受信するGPSデータを含んでいる受信信号が正確なものでなければならないのに対して、そのGPS衛星からの信号はGPS衛星との距離や上空の雲などの障害物によって生じる信号減衰や、周囲の建物等の影響によるマルチパスノイズ発生により劣化する。このようなマルチパスノイズが入ると、例えば図10に示すように、GPS測位位置が大きく変化し、その後補正により次第に正常な位置に戻るまで、画面上に異常な表示がなされるため、利用者に不信感や違和感を感じさせてしまう問題があった。
【0006】
上記のような問題点を解決するため、本発明者等によって次のような技術を開発し特許出願を行っている。その技術の概要は図11に示すように、GPSデータにより得られるGPS位置PGPS、GPS進行角θGPS、GPS速度VGPS、ジャイロと距離パルスによる車速を用いた自律航法における進行角θGYRO、及びVc等のデータを用い、P0の位置から車両が走行する可能性のある移動予測角度範囲と移動予測距離範囲によって移動予測位置、及び移動予測範囲PRG1を求める。
【0007】
この移動予測位置、及び移動予測範囲を求める手法により、図12に示すような作動を行う。即ち、図12(a)に示すように、時刻T0における位置P0からの移動予測位置P1と移動予測範囲PRG1が得られたとき、同図(b)に示すようにGPSによる測位位置PGPSが移動予測範囲PRG1内に含まれているときは、GPS測位データが正しいものとして、その位置から次の移動予測位置P2、及び移動予測範囲PRG2を前記と同様に演算する。また、例えば同図(c)に示すように、P0の位置から移動予測位置P1が得られ、移動予測範囲PRG1が得られているとき、GPSによる測位位置PGPSがマルチパス等の影響で移動予測範囲PRG1の範囲外に存在するとき、このGPS位置は不適切なデータであるとして、先に演算した移動予測位置P1がより正しい位置であるとして採用し、この位置から次の移動予測位置P2及び移動予測範囲PRG2を演算する。
【0008】
一方、前記のように4個の衛星を用いて正確な位置計測を行っているときでも、途中で3個の衛星のみを用いて位置計測を行わなければならないときがあり、そのようなときには高さを計算することができない2D測位しか行うことができないので、2D測位を行うことになった直前の衛星4個を用いて高さ測位を含めた3D測位を行っていたときの高さデータを用い、高さがその後変化しないものとして、その高さでの水平面(X−Y)の2D測位演算を行っている。
【0009】
なお、走行中に三次元測位ができなくなった後、三次元測位時の高度データを利用した二次元測位データを採用し、推測航法や地図マッチング航法等により得られた車両位置をより正確な位置に補正するとき、二次元測位に切り替わった後に道路の標高の変化があっても、正確な車両の位置補正を可能にするため、二次元測位に切り替わった後一定距離を走破するまでは、二次元測位データに基づく位置検出データを採用し、一定距離を走破した後は、二次元測位データに基づく位置検出データは採用しないようにした技術は特許文献1に記載されている。
【0010】
また、より実用的な推定誤差を得ることができるGPS受信器とするために、最後に三次元測位できたときの高度データ及び高度誤差データを記憶するとともに、外部から入力される高度データ及び高度誤差データを記憶し、実測でデータの第1経過時間に基づいて第1誤差を算出し、外部データの記憶値の第2経過時間に基づいて第2誤差を算出し、第1誤差と第2誤差とを比較して誤差の少ないデータを二次元測位時の高度データ及び高度誤差データとする技術は特許文献2に記載されている。
【特許文献1】特開平4−353783号公報
【特許文献2】特開2002−341012号公報
【発明の開示】
【発明が解決しようとする課題】
【0011】
上記のように、GPS衛星のデータによって三次元測位を行っているときでも、マルチパス等の影響で本来あるべきでないデータに基づく位置を測位し表示する問題を解決するため、常に現在の車速等によって現在地から次の測定時にとりうる範囲を計算し、その範囲にないときにはその範囲内のデータを用いる技術を提案しているが、その技術においても前記のように、三次元測位から二次元測位に切り替わったときに高さの計算を行うことができなくなっても、先の高さと同じとして二次元測位を行うこととなる。
【0012】
その際に、三次元測位から二次元測位に切り替わった地点から再度三次元測位が可能となった地点まで高度差が少ない場合は良いが、実際にはその2D測位期間中においても高さが大きく変化することも多く、且つその2D測位期間が長いと2D測位によるデータでは現在位置から更に遠ざかることとなる。このようなときに、本来は再開したときの3D測位の位置データが正しいにもかかわらず、2D測位データに基づく予測移動範囲が正しいものとして、その範囲内に補正してしまうと、その後の3D測位データについても徐々に正しい位置に修正されるものの、暫くの間は不適切な位置表示がなされることとなり、利用者に違和感や不信感を抱かせることとなる。
【0013】
したがって本発明は、現在地から次の測定時にとりうる範囲を求め、その範囲にないときにはその範囲内のデータを用いる車両位置予測手法において、三次元測位から二次元測位に切り替わり、その後再度三次元測位が可能となった時、その間の勾配が所定より大きいときでも、常に正確な車両位置を予測することができるようにした車両位置予測方法及び装置を提供することを主たる目的とする。
【課題を解決するための手段】
【0014】
本発明に係る車両位置予測方法は、GPS衛星より受信したGPS受信信号による三次元測位を行い車両位置を演算すると共に車両の走行履歴を保存し、前記走行履歴と車速データを用いて現在の車両位置から移動する可能性のある予測移動範囲を演算し、前記GPS受信信号により三次元測位が行われないとき、GPSによる二次元測位により、或いはジャイロと車速信号により車両位置を予測し、前記GPSで測位した車両位置が前回演算した予測移動範囲に存在するときには該車両位置を採用し、存在しないときには前記予測した車両位置を採用し、前記三次元測位を行っているとき、車両位置に対応する高度データを前回のデータと共に保存し、前記三次元測位が行われないときから再度三次元測位が可能となったとき、三次元測位が行われなくなった最後の車両位置の高度と、三次元測位が再開されたときの最初の車両位置の高度との差、及びそれらの車両位置間の距離により、該車両位置間の勾配を演算し、前記演算した勾配が所定以上の時、前記再度三次元測位が可能となったときのGPS測位による車両位置が、前記予測移動範囲内に存在しないときには、GPS測位による車両位置を選択することを特徴とする。
【0015】
本発明に係る他の車両位置予測方法は、前記車両位置予測方法において、前記演算した勾配が所定以上の時に、GPS測位による車両位置を選択するときには、保存した走行履歴を全て削除し、新たな走行履歴の更新を行うことを特徴とする。
【0016】
本発明に係る他の車両位置予測方法は、前記車両位置予測方法において、前記GPS測位による車両位置が予測移動範囲内にないときに行うGPS測位による車両位置の選択は、前記三次元測位が行われなくなった地点と三次元測位が再開された地点の距離が所定以上の時に行うことを特徴とする。
【0017】
本発明に係る車両位置予測装置は、GPS衛星より受信したGPS受信信号による三次元測位を行い車両位置を演算するGPS三次元測位手段と、車両の走行履歴を保存する走行履歴保存手段と、前記走行履歴と車速データを用いて現在の車両位置から移動する可能性のある範囲を演算する予測移動範囲演算手段と、前記GPS受信信号により三次元測位が行われないとき、GPSによる二次元測位により、或いはジャイロと車速信号により車両位置を予測する予測位置演算手段と、前記GPS三次元測位手段で測位した車両位置が、前記予測移動範囲演算手段で前回演算した予測移動範囲に存在するときには該車両位置を採用し、存在しないときには前記予測位置演算手段により予測した車両位置を採用する車両位置選択手段と、前記三次元測位を行っているとき、車両位置に対応する高度データを前回のデータと共に保存する高度データ保存手段と、前記三次元測位が行われないときから再度三次元測位が可能となったとき、三次元測位が行われなくなった最後の車両位置の高度と、三次元測位が再開されたときの最初の車両位置の高度との差、及びそれらの車両位置間の距離により、該車両位置間の勾配を演算する勾配演算手段と、前記勾配演算手段で演算した勾配が所定以上の時、前記再度三次元測位が可能となったときのGPS測位による車両位置が、前記予測移動範囲演算手段で演算した予測移動範囲内に存在しないときには、GPS測位による車両位置を選択する車両位置選択手段とを備えたことを特徴とする。
【0018】
本発明に係る他の車両位置予測装置は、前記車両位置予測装置において、前記走行履歴保存手段は、前記勾配演算手段で演算した勾配が所定以上の時に、GPS測位による車両位置を選択するときには、保存した走行履歴を全て削除し、新たな走行履歴を保存することを特徴とする。
【0019】
本発明に係る他の車両位置予測装置は、前記車両位置予測装置において、前記車両位置選択手段は、前記三次元測位が行われなくなった地点と三次元測位が再開された地点の距離が所定以上の時に、GPS測位による車両位置の選択を行うことを特徴とする。
【発明の効果】
【0020】
本発明は上記のように構成したので、現在地から次の測定時にとりうる予測移動範囲を求め、その範囲にないときにはその範囲内に設定する車両位置予測手法を用いる時において、三次元測位から二次元測位或いは自律航法による測位に切り替わった後に再度三次元が可能になったとき、二次元測位或いは自律航法測位を行っていた地点間の勾配が大きいときにでも、正確な車両位置の選択を行うことができ、その後の車両位置も正確に得ることができるようになる。
【発明を実施するための最良の形態】
【0021】
本発明は、GPSによる三次元測位から二次元測位或いは自律航法による測位に切り替わった後に再度三次元が可能になったとき、二次元測位或いは自律航法測位を行っていた地点間の勾配が大きいときにでも、正確な車両位置の選択を行うという目的を、GPS衛星より受信したGPS受信信号による三次元測位を行い車両位置を演算すると共に車両の走行履歴を保存し、前記走行履歴と車速データを用いて現在の車両位置から移動する可能性のある予測移動範囲を演算し、前記GPS受信信号により三次元測位が行われないとき、GPSによる二次元測位により、或いはジャイロと車速信号により車両位置を予測し、前記GPSで測位した車両位置が前回演算した予測移動範囲に存在するときには該車両位置を採用し、存在しないときには前記予測した車両位置を採用し、前記三次元測位を行っているとき、車両位置に対応する高度データを前回のデータと共に保存し、前記三次元測位が行われないときから再度三次元測位が可能となったとき、三次元測位が行われなくなった最後の車両位置の高度と、三次元測位が再開されたときの最初の車両位置の高度との差、及びそれらの車両位置間の距離により、該車両位置間の勾配を演算し、前記演算した勾配が所定以上の時、前記再度三次元測位が可能となったときのGPS測位による車両位置が、前記予測移動範囲内に存在しないときには、GPS測位による車両位置を選択することにより実現した。
【実施例1】
【0022】
本発明の実施例を図面に沿って説明する。本発明については、先に本件発明者等により出願した発明の改良技術に相当するが、本件出願時点で未だ公知ではないため、本件発明の説明に必要な部分は重複して説明する。本発明による車両位置予測装置は、図1の機能ブロックからなる車両用ナビゲーション装置における自車両の位置を予測する位置予測制御部30において、他の機能部と関連しながらシステム制御部10のソフトウエアによって行われる。なお、図1において各機能を行う機能部は、各機能を行う手段とも言うことができる。
【0023】
図1に示すナビゲーション装置においては、従来のものと同様に、システム制御部10に各種の所定の機能を総合的に行うためのソフトウェアを記録したROM、そのソフトウェアを処理するためのCPU及びRAM等を備え、これと接続した各機能部を関連づけて総合的に制御している。図示のナビゲーション装置においては、このシステム制御部10に、CD−ROM、DVD−ROM、或いはハードディスク等の地図・情報データ記録媒体11から必要な地図データ、施設情報等を取り込むデータ取込部12を備えている。
【0024】
指示信号入力部15においては、このナビゲーション装置での利用者によるリモコン13やタッチパネル等の指示信号を入力している。更に必要に応じて利用者の音声を認識する処理によって利用者の指示信号を入力する音声認識部14の信号も、この指示信号入力部15に入力している。誘導経路演算部16では、利用者が種々の手法で入力した目的地と、GPS等によって得られる後述するような車両位置との間の誘導経路を演算し、誘導経路記憶部17では種々の条件で提示した誘導経路の中から利用者が選択した1つの誘導経路を記憶し、誘導経路案内部18では記憶した誘導経路に沿って車両が安全に走行できるように、音声出力部20によりスピーカ19から音声により、また画像出力部22からモニタ21に表示して案内を行う。
【0025】
GPS受信機23においては、GPS衛星から送られてくるGPS信号を受信し、車両の絶対的現在位置(GPS位置)や進行方向を算出すると共に、ドプラーシフトを利用して車両速度(GPS速度)を算出し、またGPS測位に使用できる衛星の数が4個以上であることにより高さを含めた測位としての3D測位が可能か、3個の衛星しか用いることができないことにより2D測位のみを行うか、或いは更に2個以下、更には1個も利用できない等の、GPS測位可、不可信号も出力する。
【0026】
自律航法センサー部26は、所定時間毎にジャイロを用いて走行方向を検出する角度センサー27と、車両の車速パルスから走行距離及び車速を検出する距離センサ28とを備えている。自律航法位置予測演算部29では、角度センサー27からの走行方位信号と、車速パルスを用いる距離センサー28からの車速信号と、更に必要に応じてGPS受信機で測定した現在位置信号を入力し、特にGPSが3D測位中でもマルチパス等による突然の異常信号により現在位置が別の位置に飛ばないように予測移動範囲設定のために、また3D測位から2D測位になったときの現在位置測位のデータのために、更にトンネル内等のGPS受信不能時における予測車両位置データのために利用する。この自律航法位置予測演算部29で得たデータは、主として後述する位置予測制御部30において用いられる。
【0027】
自律航法位置予測演算に際しては図6に示すように、基準方位(θ=0)をX軸の正方向、基準方位から反時計方向回りを+方向とするとき、前回の車両位置を点P0(X0,Y0)、点P0での車両進行方向の絶対方位をθ0、単位時間t後の移動距離L0(=V×t)移動した時点での相対方位センサーの出力をΔθ1であるとすると、車両位置の変化分は、
ΔX=L0・cos(θ0+Δθ1)
ΔY=L0・sin(θ0+Δθ1)
となり、今回の点P1での車両進行方向の堆定方位θ1と堆定車両位置(X1,Y1)は、 θ1=θ0+Δθ1 (1)
X1=X0+ΔX=X0+L0・cosθ1 (2)
Y1=Y0+ΔY=Y0+L0・sinθ1 (3)
としてベクトル合成により、次回演算時の予測位置の計算ができる。
【0028】
位置予測制御部30には予測位置演算部31を備え、前記のような自律航法センサー部26の各種データと、GPS受信機23のデータ等を用いて、前記図11に示すような手法により、或いは後に詳述する手法により所定時間後に走行している位置の予測を行う。また信頼度判定部32では、後述する手法によりGPSデータの信頼度を判定し、その信頼度の程度に応じた現在位置予測制御等の制御を行う。また予測移動範囲演算部33では、後述する手法により予測移動範囲の演算を行う。また、位置予測制御部30には後に詳述するように、走行履歴保存部34を備え、車両進行方向と共に、GPS速度と自律航法センサー部で検出された車速との差ΔVを走行履歴情報として保存する。このデータは走行履歴更新部35によって更新しながら、走行履歴情報を最新の複数個、例えば図7に示すようなデータについて10個等の、適宜の数の履歴を記憶する。
【0029】
更に、位置予測制御部30には、GPSによる3D測位ができなくなってから、それ以降3D測位可能になったとき迄の走行中における高度差に対応した位置予測制御を行うための、高度対応位置予測制御部36を備えている。高度対応位置予測制御部36には高度データ保存部37を備え、GPSにより3D測位が可能なときに、現在測定した高度データと、前回測定した高度データとを保存している。高度差演算部38では、GPSによる3D測位ができなくなった後に3D測位が再開できるようになったときの高度データと、その時に高度データ保存部36に保存している最後に3D測位を行った時の高度データとにより高度差を演算する。また、3D測位不能時走行距離演算部39では、前記のように3D測位不能となったときから、その後3D測位可能となったときの走行距離を積算して演算する。
【0030】
高度対応位置予測制御部36における勾配演算部40では、前記高度差演算部38で演算した3D測位不能時から3D測位可能時迄の高度差Hと、3D測位不能時走行距離演算部39で演算した距離Lとにより、3D測位不能期間中の勾配(H/L)を演算する。また、勾配判定部41では勾配演算部40で演算した勾配が所定以上の勾配であるか否かを判別する。ここで所定以上の勾配であると判別したときには、車両位置選択部43により、GPSによる3D測位可能になったときのGPS測位位置が、GPSによる2D測位、或いは自律航法位置予測演算部29による位置予測による予測範囲以外に存在するときでも、3Dによる測位位置を車両位置とする出力を行う。それによって、2D測位等による位置予測が大きな高度差によって次第に誤差が大きくなり、3D測位再開時にそのデータを用いることによる測位の不都合を回避する。このとき、走行履歴削除部42は、走行履歴更新部35に対して3D測位再開までの走行履歴は不適切なものとして、走行履歴保存部34内の履歴データを全て削除し、新たな走行履歴の更新を行うように指示する。
【0031】
上記のような機能ブロックからなる本発明においては、例えば図2〜図5に示す作動フローにより作動させることができる。以下これらの作動フローを図1の機能ブロック図、及び図8以降の説明図等を参照しつつ説明する。図2に示す現在位置検出処理の作動フローにおいては、最初に所定時間毎に設定した位置計算のタイミングになったか否かを判別し(ステップS1)、位置計算タイミンクになったときには、予測位置演算部31はGPS受信機23よリGPS計算データ(GPS位置PGPS、GPS速度VGPS、GPS進行方向θGPS、GPS測位状態信号を取得し、更に自律航法センサー部26より進行方向変化θGYROや車速Vcを取得する(ステップS2)。
【0032】
図2の作動フローにおいては、次いでGPSによる3D測位が可能であるか否かを判別する(ステップS3)。この判別は、図1のGPS受信機23におけるGPS計算部25から得られる、GPS測位可/不可信号を用い、位置予測制御部30の信頼度判定部32において判別する。即ち、信頼度判定部32においては、この処理に際して、GPS受信機において少なくとも4個の衛星を用いることにより3D測位を行うことができるか否かをチェックする。その結果3D測位が可能ではないと判別したときには、ステップS11において図4に示すような、特に本発明の特徴とするGPSによる3D測位不能時の現在位置予測処理を行う。
【0033】
ステップS3においてGPSによる3D測位が可能であると判別したときには、走行履歴情報の更新処理を行う(ステップS4)。この処理は例えば図3(a)に示す作動フローに従い、同図(b)に示す走行履歴情報更新処理例のような処理を行う。図3(a)に示す走行履歴情報更新処理の例においては、最初走行履歴保存タイミンクになったか、即ち、位置測定タイミンクになったか監視し(ステップS21)、そのタイミンクになったときGPSデータに信頼性があるかチェックする(ステップS22)。GPSデータに信頼性があるか否かは、信頼度判定部32が測定し、測定結果について走行履歴更新部35に入力する。
【0034】
このとき信頼度判定部32においては、
(1)GPS受信信号による位置測定が可能か、
(2)GPS受信信号より得られる車速が1km/h以上であるか、
(3)GPS受信信号より得られるGPS進行方向の変化と角度センサー27から得られる進行方向変化θGYROの差が設定値以上になったか、
(4)前記進行方向変化θGYROの変化が設定値以上になったか否か、
を判定し監視する。
【0035】
その判定、監視結果により、
(1)GPS受信信号による位置測定ができない。
(2)GPS衛星から受信した信号より得られる車速が1km/h以下になっている。
(3)GPS進行方向の変化と前記進行方向変化θGYROの差が設定値以上になっている。
(4)前記進行方向変化θGYROの変化が設定値以上になっている。
のいずれかが成立したとき、GPS位置に信頼性がないと判定する。またそれらとは逆に、GPS受信信号による位置測定ができ、GPS衛星から受信した信号より得られる車速か1km/hより大きく、GPS進行方向の変化と前記進行方向変化θGYROの差が設定値より小さく、前記進行方向変化θGYROの変化が設定値より小さいときに、GPS位置に信頼性かあると判定する。なお、ここで行われるGPS受信信号による位置測位ができるか否かの判別に際しては、3D測位以外に2D測位でも測位が行われれば、GPS測位が可能と判別することもできる。
【0036】
走行履歴更新部35は、GPSデータに信頼性があれば図3(b)に示すように、GPS受信信号より求まる最新のGPS進行方向θGPSを前記進行方向履歴保存部に保存すると共に、GPS受信信号より得られるGPS速度と距離センサー28により得られる車速との差ΔVを保存する(ステップS23)。即ち、次式
(θREF)1=θGPS
ΔV1=ΔV
の更新処理を行う。
【0037】
その後走行履歴更新部35は、一番古い進行方向履歴情報を除去し、かつ、残りの進行方向履歴情報に角度センサーから求まる進行方向変化θGYROを加算して進行方向履歴情報を更新する(ステップS24)。即ち、次式
(θREF)i+1=(θREF)i+θGYRO
ΔVi+1=ΔVi
の更新処理を行い、図3(b−2)のデータを得る。以上により、10組の進行方向は全て現時点における車両進行方向となるように更新される。
【0038】
一方、ステップS22において、GPSデータに信頼性がないと判別したときには、走行履歴保存部34に保存されている全進行方向履歴情報に、前記進行方向変化θGYROを加算して進行方向履歴情報を更新する(ステップS25)。なお、このときは車速差は変更しない。即ち、次式
(θREF)i=(θREF)i+θGYRO
ΔVi=ΔVi
の更新処理を行い図3(b−3)のデータを得る。これにより、GPSデータに信頼性がある場合と同様に10組の進行方向は全て現時点における車両進行方向となるように更新される。
【0039】
図2に示す実施例においては、ステップS4の前記走行履歴情報更新処理に次いで、今回と前回測位した高度データの更新処理を行う(ステップS5)。この処理は図1の高度対応位置予測制御部36における高度データ保存部37において行われる。この処理においては、高度データ保存部37に今回と前回のデータのみを保存するメモリを設け、新しいデータが入る毎に逐次更新してそのデータを記憶する。それにより、後述するようにその後3D測位ができなくなり、更にその後3D測位が可能となったとき、3D測位が可能となった時点の高度データと、その前のデータである3D測位ができなくなることによりステップS3でステップS11に進むとき、ステップS5で保存したデータが残り、上記3D測位が再開されたときに、図1の高度差演算部38で両データによって高度差を演算することが可能となる。
【0040】
その後GPSで測位した位置は前回予測した予測移動範囲内に存在するか否かを判別する(ステップS6)。この判別に際しては、前回の位置測定タイミングにおいて後述するステップS8、ステップS10等で設定された予測移動範囲内に、GPS測位位置が存在するか否かを検出することにより行われる。この判別の結果、GPS測位位置が予測移動範囲内に存在すると判別したときには、GPS位置を現在位置として出力し(ステップS7)、GPS進行方向θGPS、GPS速度を用いて次の時刻における予測位置及び予測移動範囲を算出する。
【0041】
前記ステップS8の予測移動範囲の算出処理に際しては、この実施例においては図8に示すような車両特有の走行特性データを用いる。即ち図8(a)に示すように、車両の実際の走行速度と、その速度における方向の変更状態としての角速度との関係の実測値を多数測定して図のようにプロットし、それにより所定の速度における角速度が生じる標準偏差値をとると、99.7%の確率で存在する値である3σの範囲は、図示するような式で表される上側の線と、これとプラスマイナス逆にした下側の線とで挟まれた範囲であることがわかる。
【0042】
同様に、図8(b)に示すように、車両の実際の走行速度と、その速度における車両が加速する程度の関係の実測値を多数測定して図のようにプロットし、それにより所定の速度における加速度が生じる標準偏差値をとると、3σの範囲は同図に示すような式で表される上側の線と同様の下側の線の範囲内であることがわかる。それにより、例えば図9に示すように車両の現在位置がP0の時、GPSデータにより得られる車速、或いは車両データとしての車速を用い、P0の位置から車両が走行する可能性のある移動可能角度範囲を前記図8(a)の関係式から求め、同様にP0の位置から車両が走行している可能性のある移動可能距離範囲を同図(b)の関係式から求めることができ、その結果図9の予測移動範囲PRG1が得られる。図9(a)にはこの予測移動範囲PRG1内の中心部近傍で、中心方位PL上にGPSによる3D測位位置PGPSが存在し、予測移動位置P1も存在する理想的な例を示している。
【0043】
図9(b)には同図(a)の状態でGPSによる測位が行われ、その位置PGPSが予測移動位置P1とは異なる位置ではあるが、移動可能範囲PRG1内に含まれている状態を示している。このような状態の時、前記ステップS6において、GPS測位位置は予測移動範囲内に存在すると判別し、ステップS7においてこのGPS位置PGPSを現在位置として出力することとなる。なお、予測移動範囲の設定に際しては前記の手法に対して、例えば道路を常に含むように予測範囲を調節する等の他の手法を加えて予測しても良く、更に図11で説明した先の出願の実施例のように別の手法によって行っても良い。
【0044】
またステップS8における予測位置の算出に際しては、例えば図1の自律航法位置予測演算部29において、距離センサー28で車両が所定距離走行する毎にパルスを出力し、したがつて単位時間当たりに発生するパルス数を計数することにより車両移動速度Vcを測定でき、またGPSのドプラーシフトデータによりVGPSとして得ることもできる。
【0045】
図2に示す例においては、ステップS6において、例えば前記のようなマルチパスノイズ等によって図9(c)のPGPSのように、予測移動範囲PRG1の範囲に存在しないときには、GPS測位位置が前回算出時の予測移動範囲の中心方位線に最も近い位置を現在位置として出力する。即ち、図9(c)に示すように、予測移動範囲PRG1の範囲外に存在するGPS測位位置PGPSについて、予測移動範囲PRG1の中心方位線PLにこれを投射した位置であり、換言すると、GPS測位位置PGPSが中心方位線PLに最も近い位置であるPGPS1を現在位置とする。なお、このような現在位置の補正手法に代えて先の出願のように、予測位置或いは自律航法予測位置を現在位置として出力することもできる。その後、車速差ΔVが最小の進行方向とGPS速度VGPSを用いて、次の時刻における予測位置及び予測移動範囲を算出する(ステップS10)。
【0046】
ここで使用する車両進行方向θとしては、走行履歴保存部34に保存されている10組の進行方向履歴データのうち、車速差ΔVが最も小さい組の車両進行方向を選ぶ。これは、GPS速度VGPSと車速センサーより得られた速度Vcとの差が最小のときに最も進行方向データの信頼度が高くなるからである。なお、GPS速度VGPSはドプラーシフトに基づいて検出されるためGPS位置に信頼性かなくても精度は高い。その後は前記ステップS8と共にステップS1に戻って前記作動を繰り返す。なお、ステップS10における予測位置及び予測移動範囲の算出は、ステップS8とほぼ同様の手法により行うので、ここでの説明は省略する。
【0047】
一方、図2のステップS3において、GPSによる3D測位が不可能と判別した場合にはステップS11に進み、図4及びそれに続く図5に示すような処理を行う。即ち図4に示すGPSによる3D測位不能時の現在位置予測処理の例においては、最初にGPSによる2D測位が可能であるか否かを判別する(ステップS31)。ここでGPSによる3D測位が不能であっても2D測位は可能であると判別したときには、ステップS33においてGPSによる2D測位位置を現在位置として出力する。
【0048】
また、例えばトンネル内に入ったときのように、GPSによる2D測位も不能であるときには、先に演算した自律航法による予測位置を算出して現在位置として出力する(ステップS32)。前記ステップS32及びS33において現在位置が出力された後は、走行履歴情報の更新処理を行う(ステップS34)。ここでの走行履歴情報の更新処理は、前記図3における走行履歴情報更新処理において、ステップS22におけるGPSデータに信頼性があるか否かの判別で信頼性がないと判別され、ステップS25におけるθGYROを用いて履歴情報を更新する処理を行い、図3(b−3)の例のような更新処理を行う。その後、次の時刻における予測位置及び予測移動範囲を取得する(ステップS35)。この処理においては主として自律航法によるデータによって予測位置及び予測移動範囲の取得が行われるが、GPSが一つでも受信可能なときにはGPSデータを利用することもできる。
【0049】
次いで図3の実施例においてはGPSによる3D測位が不能になってからの走行距離の積算を行う(ステップS36)。この積算により後述するようなGPSによる3D測位が可能に立ったときにおいて、例えば500m等の所定の距離数以上走行したか否かを判別可能となる。その後次の位置計算のタイミングになったか否かを判別し(ステップS37)、未だそのタイミングになっていないときはこの作動を繰り返して待機する。次の位置計算のタイミングになったと判別したときには、GPSによる3D測位が可能になったか否かの判別を行い、未だGPSによる3D測位が不能のときには、ステップS31に戻って前記作動を繰り返す。その後GPSによる3D測位が可能となったときには、図5に示すGPSによる3D測位再開時の現在位置検出処理を行う(ステップS39)。
【0050】
図5に示すGPSによる3D測位再開時の現在位置検出処理においては、最初にGPSにより現在位置とその位置の高さを取得する(ステップS42)。次いでGPS位置は予測移動範囲内に存在するか否かを判別する(ステップS43)。ここでGPS位置が予測移動範囲内に存在していないと判別したときには、GPSによる3D測位不能時からの積算走行距離が500m等の所定距離以上か否かを判別する(ステップS44)。この判別に際しては、前記図4のステップS36において、GPSによる3D測位不能になってからの走行距離の積算を行ったデータを用いる。この積算処理は、図1の高度対応位置予測制御部36における3D測位不能時走行距離演算部39において行っている。
【0051】
ステップS44においてGPSによる3D測位不能時からの積算走行距離が500m等の所定距離以上であると判別したときには、3D測位不能時と今回の高度差を演算する(ステップS45)。次いで3D測位不能時から今回までの勾配を演算する(ステップS46)。この処理は図1の高度対応位置予測制御部36における勾配演算部40で行う。その後、演算した勾配は所定以上か否かを判別する(ステップS47)。
【0052】
その判別の結果、勾配が所定以上であると判別したときには、今回の走行履歴情報のみ保存し、他はクリアする(ステップS49)。即ち、前記ステップS44でGPSによる3D測位不能時からの積算走行距離が例えば500m等の所定距離以上走行することによって2D測位の連続、或いはGPS測位無しによる自律航法測位の連続によって、誤差が積算して大きくなるとともに、ステップS47でその走行期間中の勾配が所定以上であることにより、高度差に伴う誤差が大きくなるため、GPSによる3D測位の位置が予測移動範囲内にない場合でも、GPSによる3D測位位置の方が正しい位置を示していると判断する。
【0053】
また、その判断に関連して、このステップS49においてそれまでの走行履歴情報は誤差が大きくなっていると判断し、それらの走行履歴情報を削除し、今回再開されたGPSによる3D測位のデータから正しいデータであるとし、これを最初の走行履歴情報として記憶する。それ以降は前記のような手法により、順にデータを蓄積し、更に更新していくこととなる。次いで、前記ステップS43においてGPS位置は予測移動範囲内に存在すると判別したときと共に、GPS位置を現在位置として出力する(ステップS50)。
【0054】
また、前記ステップS44においてGPSによる3D測位不能時からの積算走行距離が500m等の所定距離以上ではないと判別したとき、及びステップS47において演算した勾配は所定以上ではないと判別したときには、3D測位を行うことができなかった走行区間は比較的短く、或いはその間の勾配は測位誤差を問題にする程は大きくないと判断し、前記図2のステップS9と同様に、予測移動範囲の中心方位線に最も近い位置を現在位置として出力する(ステップS52)。その後前記ステップS10と同様に、車速差ΔVが最小の進行方向とGPS速度VGPSを用いて予測位置及び予測移動範囲の算出を行う(ステップS10)。以降は前記ステップS51と同様に、再び図2のステップS1に戻って前記作動を繰り返す。
【0055】
本発明においてはこのような処理を行うことにより、GPSによる3D測位が行われている途中でその3D測位が不能となり、その後再びGPSによる3D測位が可能となったとき、3D測位が不能であった期間の勾配が所定より大きいとき、その期間に行っていた2D測位や自律航法による現在位置の予測が不正確になっており、その際にはGPSによる3D測位位置が予測範囲に入っていない場合でも、GPSによる3D測位の位置が正しいものとして現在位置を出力することができるようになる。しかも3D測位が上記のようにして再開されたときには、それまで蓄積していた走行履歴情報を削除し、新たな蓄積を開始することにより、誤ったデータの利用による現在位置のずれの長期間継続を防止することができるようになる。
【図面の簡単な説明】
【0056】
【図1】本発明の実施例の機能ブロック図である。
【図2】同実施例の作動フロー図である。
【図3】図2の作動フローにおける走行履歴情報更新処理部分の作動フロー図である。
【図4】図2の作動フローにおけるGPSによる3D測位不能時の現在位置予測処理部分の作動フロー図である。
【図5】図4の作動フローにおけるGPSによる3D測位再開時の現在位置検出処理部分の作動フロー図である。
【図6】車両位置予測処理を示す図である。
【図7】走行履歴データの例を示す図である。
【図8】予測移動範囲の算出処理に用いる車両特有の走行特性データの例を示す図である。
【図9】予測移動範囲、及びGPS測位現在位置との関係を示す図である。
【図10】従来のGPS測位におけるマルチパス等の影響による測位位置の変化例を示す図である。
【図11】先に提案した自律航法による移動予測範囲の設定と、移動予測位置の例を示す図である。
【図12】先に提案した車両位置予測と予測移動範囲、及びGPS測位データの関係を示す図である。
【符号の説明】
【0057】
10 システム制御部
23 GPS受信機
24 GPS受信部
25 GPS計算部
26 自律航法センサー部
27 角度センサー
28 距離センサー
29 自律航法位置予測演算部
30 位置予測制御部
31 予測位置演算部
32 信頼度判定部
33 予測移動範囲演算部
34 走行履歴保存部
35 走行履歴更新部
36 高度対応位置予測制御部
37 高度データ保存部
38 高度差演算部
39 3D測位不能時走行距離演算部
40 勾配演算部
41 勾配判定部
42 走行履歴削除部
43 車両位置選択部
【特許請求の範囲】
【請求項1】
GPS衛星より受信したGPS受信信号による三次元測位を行い車両位置を演算すると共に車両の走行履歴を保存し、
前記走行履歴と車速データを用いて現在の車両位置から移動する可能性のある予測移動範囲を演算し、
前記GPS受信信号により三次元測位が行われないとき、GPSによる二次元測位により、或いはジャイロと車速信号により車両位置を予測し、
前記GPSで測位した車両位置が前回演算した予測移動範囲に存在するときには該車両位置を採用し、存在しないときには前記予測した車両位置を採用し、
前記三次元測位を行っているとき、車両位置に対応する高度データを前回のデータと共に保存し、
前記三次元測位が行われないときから再度三次元測位が可能となったとき、三次元測位が行われなくなった最後の車両位置の高度と、三次元測位が再開されたときの最初の車両位置の高度との差、及びそれらの車両位置間の距離により、該車両位置間の勾配を演算し、
前記演算した勾配が所定以上の時、前記再度三次元測位が可能となったときのGPS測位による車両位置が、前記予測移動範囲内に存在しないときには、GPS測位による車両位置を選択することを特徴とする車両位置予測方法。
【請求項2】
前記演算した勾配が所定以上の時に、GPS測位による車両位置を選択するときには、保存した走行履歴を全て削除し、新たな走行履歴の更新を行うことを特徴とする請求項1記載の車両位置予測方法。
【請求項3】
前記GPS測位による車両位置が予測移動範囲内にないときに行うGPS測位による車両位置の選択は、前記三次元測位が行われなくなった地点と三次元測位が再開された地点の距離が所定以上の時に行うことを特徴とする請求項1記載の車両位置予測方法。
【請求項4】
GPS衛星より受信したGPS受信信号による三次元測位を行い車両位置を演算するGPS三次元測位手段と、
車両の走行履歴を保存する走行履歴保存手段と、
前記走行履歴と車速データを用いて現在の車両位置から移動する可能性のある範囲を演算する予測移動範囲演算手段と、
前記GPS受信信号により三次元測位が行われないとき、GPSによる二次元測位により、或いはジャイロと車速信号により車両位置を予測する予測位置演算手段と、
前記GPS三次元測位手段で測位した車両位置が、前記予測移動範囲演算手段で前回演算した予測移動範囲に存在するときには該車両位置を採用し、存在しないときには前記予測位置演算手段により予測した車両位置を採用する車両位置選択手段と、
前記三次元測位を行っているとき、車両位置に対応する高度データを前回のデータと共に保存する高度データ保存手段と、
前記三次元測位が行われないときから再度三次元測位が可能となったとき、三次元測位が行われなくなった最後の車両位置の高度と、三次元測位が再開されたときの最初の車両位置の高度との差、及びそれらの車両位置間の距離により、該車両位置間の勾配を演算する勾配演算手段と、
前記勾配演算手段で演算した勾配が所定以上の時、前記再度三次元測位が可能となったときのGPS測位による車両位置が、前記予測移動範囲演算手段で演算した予測移動範囲内に存在しないときには、GPS測位による車両位置を選択する車両位置選択手段とを備えたことを特徴とする車両位置予測装置。
【請求項5】
前記走行履歴保存手段は、前記勾配演算手段で演算した勾配が所定以上の時に、GPS測位による車両位置を選択するときには、保存した走行履歴を全て削除し、新たな走行履歴を保存することを特徴とする請求項4記載の車両位置予測方法。
【請求項6】
前記車両位置選択手段は、前記三次元測位が行われなくなった地点と三次元測位が再開された地点の距離が所定以上の時に、GPS測位による車両位置の選択を行うことを特徴とする請求項4記載の車両位置予測装置。
【請求項1】
GPS衛星より受信したGPS受信信号による三次元測位を行い車両位置を演算すると共に車両の走行履歴を保存し、
前記走行履歴と車速データを用いて現在の車両位置から移動する可能性のある予測移動範囲を演算し、
前記GPS受信信号により三次元測位が行われないとき、GPSによる二次元測位により、或いはジャイロと車速信号により車両位置を予測し、
前記GPSで測位した車両位置が前回演算した予測移動範囲に存在するときには該車両位置を採用し、存在しないときには前記予測した車両位置を採用し、
前記三次元測位を行っているとき、車両位置に対応する高度データを前回のデータと共に保存し、
前記三次元測位が行われないときから再度三次元測位が可能となったとき、三次元測位が行われなくなった最後の車両位置の高度と、三次元測位が再開されたときの最初の車両位置の高度との差、及びそれらの車両位置間の距離により、該車両位置間の勾配を演算し、
前記演算した勾配が所定以上の時、前記再度三次元測位が可能となったときのGPS測位による車両位置が、前記予測移動範囲内に存在しないときには、GPS測位による車両位置を選択することを特徴とする車両位置予測方法。
【請求項2】
前記演算した勾配が所定以上の時に、GPS測位による車両位置を選択するときには、保存した走行履歴を全て削除し、新たな走行履歴の更新を行うことを特徴とする請求項1記載の車両位置予測方法。
【請求項3】
前記GPS測位による車両位置が予測移動範囲内にないときに行うGPS測位による車両位置の選択は、前記三次元測位が行われなくなった地点と三次元測位が再開された地点の距離が所定以上の時に行うことを特徴とする請求項1記載の車両位置予測方法。
【請求項4】
GPS衛星より受信したGPS受信信号による三次元測位を行い車両位置を演算するGPS三次元測位手段と、
車両の走行履歴を保存する走行履歴保存手段と、
前記走行履歴と車速データを用いて現在の車両位置から移動する可能性のある範囲を演算する予測移動範囲演算手段と、
前記GPS受信信号により三次元測位が行われないとき、GPSによる二次元測位により、或いはジャイロと車速信号により車両位置を予測する予測位置演算手段と、
前記GPS三次元測位手段で測位した車両位置が、前記予測移動範囲演算手段で前回演算した予測移動範囲に存在するときには該車両位置を採用し、存在しないときには前記予測位置演算手段により予測した車両位置を採用する車両位置選択手段と、
前記三次元測位を行っているとき、車両位置に対応する高度データを前回のデータと共に保存する高度データ保存手段と、
前記三次元測位が行われないときから再度三次元測位が可能となったとき、三次元測位が行われなくなった最後の車両位置の高度と、三次元測位が再開されたときの最初の車両位置の高度との差、及びそれらの車両位置間の距離により、該車両位置間の勾配を演算する勾配演算手段と、
前記勾配演算手段で演算した勾配が所定以上の時、前記再度三次元測位が可能となったときのGPS測位による車両位置が、前記予測移動範囲演算手段で演算した予測移動範囲内に存在しないときには、GPS測位による車両位置を選択する車両位置選択手段とを備えたことを特徴とする車両位置予測装置。
【請求項5】
前記走行履歴保存手段は、前記勾配演算手段で演算した勾配が所定以上の時に、GPS測位による車両位置を選択するときには、保存した走行履歴を全て削除し、新たな走行履歴を保存することを特徴とする請求項4記載の車両位置予測方法。
【請求項6】
前記車両位置選択手段は、前記三次元測位が行われなくなった地点と三次元測位が再開された地点の距離が所定以上の時に、GPS測位による車両位置の選択を行うことを特徴とする請求項4記載の車両位置予測装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2007−248165(P2007−248165A)
【公開日】平成19年9月27日(2007.9.27)
【国際特許分類】
【出願番号】特願2006−70050(P2006−70050)
【出願日】平成18年3月14日(2006.3.14)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
【公開日】平成19年9月27日(2007.9.27)
【国際特許分類】
【出願日】平成18年3月14日(2006.3.14)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
[ Back to top ]