
車両位置探索システム
【課題】車載機器遠隔制御システムの本来の機能に制限を加えることなく、新たなセンサの追加を必要とすることもなく、車両位置探索システムを提供する。
【解決手段】携帯装置10は、無指向性アンテナ17及び指向性アンテナ18を備える。携帯装置10は、ユーザ入力装置11から指示信号が送られたとき、無指向性アンテナ17を用いて第1の車両探索信号を車載装置20に送信し、指向性アンテナ18を用いて第2の車両探索信号を車載装置20に送信する。車載装置20は、第1の車両探索信号の相関値と、第2の車両探索信号の相関値とを取得し、第1の車両探索信号の相関値と第2の車両探索信号の相関値との差がしきい値Aより大きいか否かを判断し、判断結果を携帯装置10に送信する。携帯装置10は、送信された判断結果をユーザ通知装置14に出力する。
【解決手段】携帯装置10は、無指向性アンテナ17及び指向性アンテナ18を備える。携帯装置10は、ユーザ入力装置11から指示信号が送られたとき、無指向性アンテナ17を用いて第1の車両探索信号を車載装置20に送信し、指向性アンテナ18を用いて第2の車両探索信号を車載装置20に送信する。車載装置20は、第1の車両探索信号の相関値と、第2の車両探索信号の相関値とを取得し、第1の車両探索信号の相関値と第2の車両探索信号の相関値との差がしきい値Aより大きいか否かを判断し、判断結果を携帯装置10に送信する。携帯装置10は、送信された判断結果をユーザ通知装置14に出力する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車載機器遠隔制御システム(すなわち、車載装置及び携帯装置からなるシステムであって、車載装置が携帯装置と通信してコード照合を行い、照合結果に基づいて、携帯装置のユーザによる車両の使用を許可又は不許可するように制御するシステム)において、その付加機能として、通信される電波を利用して車両の位置を探索する車両位置探索システムに関する。
【背景技術】
【0002】
従来から、車載機器遠隔制御システムとして、携帯型の遠隔制御装置(携帯装置)を操作して車両のドアの施錠及び解錠を行う遠隔操作機能に加えて、携帯装置を操作することなく、車載装置からの質問信号に対して携帯装置が所定のコード信号を返信し、返信されたコード信号の照合結果に応じて車載装置がドアの施錠及び解錠を行うスマートキー機能を有する装置がある。さらに、車載機器遠隔制御システムの付加機能として、携帯装置と車載装置が通信する電波を用いて車両の位置を探索するものがある。
【0003】
例えば、特許文献1は、携帯装置に複数個の指向性アンテナを設け、各アンテナの受信電界レベルを用いて、車両の方向や距離を探索することを提案している。また、特許文献2は、車載装置側に複数個の指向性アンテナを設けるとともに車載装置と携帯装置に地磁気センサを設けて、車載装置と携帯装置が絶対方位を知る手段を設けることで、車載装置から使用中の指向性アンテナが向いている絶対方位を示す信号を送信し、携帯装置側にてその信号を受信することで車両の方向を探索する方法を提案している。また、特許文献3は、携帯装置にGPSセンサを搭載し、停車時の位置情報をGPSセンサで取得して記憶し、車両の位置を探索するときにも現在の位置情報をGPSセンサで取得して、記憶している停車時の位置情報と比較して探索することを提案している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平10-232999号公報(3ページ右側23〜24行、図2)。
【特許文献2】特開2006-125983号公報(4ページ47行〜5ページ4行、5ページ36〜41行、図1)。
【特許文献3】特開平6-84092号公報(2ページ右側15〜27行目、図1)。
【発明の概要】
【発明が解決しようとする課題】
【0005】
車載機器遠隔制御システムは、本来、車載装置と携帯装置との間の通信によるコード照合を行って、その照合結果に基づいて、携帯装置のユーザによる車両の使用を許可又は不許可するように制御するものである(遠隔操作機能及びスマートキー機能)。車両探索機能を実現するために携帯装置において無指向性アンテナではなく指向性アンテナのみを設けた場合には、その本来の機能のための通信を行う際に、携帯装置の通信方向を制限したり、指向性アンテナの切り換えのために通信時間が増大したりするという課題があった。また、車両位置探索システムを実現するために地磁気センサやGPSセンサ等のセンサを用いるという提案があったが、コストや消費電力が増加するなどの課題があった。
【0006】
本発明の目的は、上記の問題点を解決し、車載機器遠隔制御システムを用いた車両位置探索システムであって、車載機器遠隔制御システムの本来の機能に制限を加えることなく、また、新たなセンサの追加を必要とすることもなく、車両の位置を探索してユーザに通知することができる車両位置探索システムを提供することを目的としている。
【課題を解決するための手段】
【0007】
本発明の態様に係る車両位置探索システムは、
無線通信手段をそれぞれ備えた車載装置及び携帯装置を含む車両位置探索システムにおいて、
上記携帯装置の無線通信手段は、無指向性アンテナ及び指向性アンテナを備え、
上記携帯装置は、ユーザ入力情報を取得する入力手段及びユーザに通知する通知手段を備え、
上記携帯装置は、上記入力手段から指示信号が送られたとき、無指向性アンテナを用いて第1の車両探索信号を車載装置に送信し、指向性アンテナを用いて第2の車両探索信号を車載装置に送信し、
上記車載装置は、上記第1の車両探索信号の信号強度と、上記第2の車両探索信号の信号強度とを取得し、上記第1の車両探索信号の信号強度と上記第2の車両探索信号の信号強度との差が第1のしきい値より大きいか否かを判断し、判断結果を上記携帯装置に送信し、
上記携帯装置は、上記送信された判断結果を上記通知手段に出力することを特徴とする。
【発明の効果】
【0008】
本発明は、携帯装置において、無指向性アンテナ及び指向性アンテナと、ユーザ入力装置から車両探索指示が送られたアンテナを切り換えるアンテナ切り換え回路と、例えばスペクトル拡散を用いて変復調する無線送受信回路とを設け、車載装置において、無指向性アンテナと、例えばスペクトル拡散を用いて変復調し、復調した信号とともにそのときの相関値をコントローラに出力する無線送受信回路と、携帯装置が無指向性アンテナで送信した時の相関値と指向性アンテナで送信した時の相関値とを比較して車両方向判定し、その結果を携帯装置に伝えるための信号を生成するコントローラとを設けたことを特徴とする。これにより、通常のスマートキー動作を行う際には、携帯装置は無指向性アンテナを用いることができ、指向性アンテナしか持たないために通信方向を制限してしまう等の弊害を生じることない。車両探索を行う際には、無指向性アンテナと指向性アンテナの相関値を比較することで、混信や干渉、マルチパスの影響を軽減でき、精度良く車両位置を探索することができ、さらに指向性アンテナにて携帯装置の基準方向が判別できるため、地磁気センサやGPS等他のセンサを追加することがない、といった従来にない効果を奏するものである。
【図面の簡単な説明】
【0009】
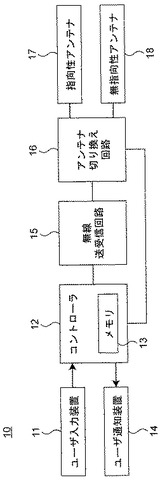
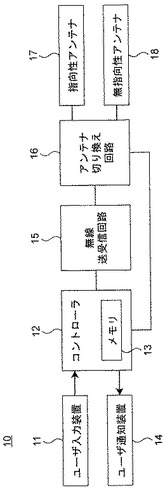
【図1】本発明の実施の形態1に係る例示的な携帯装置10を示すブロック図である。
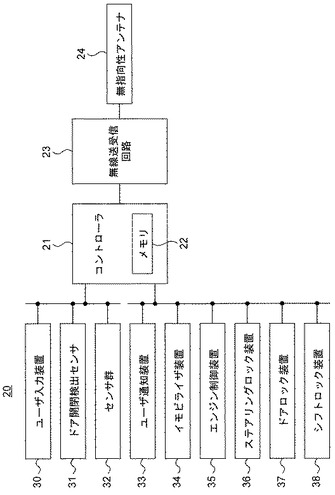
【図2】本発明の実施の形態1に係る例示的な車載装置20を示すブロック図である。
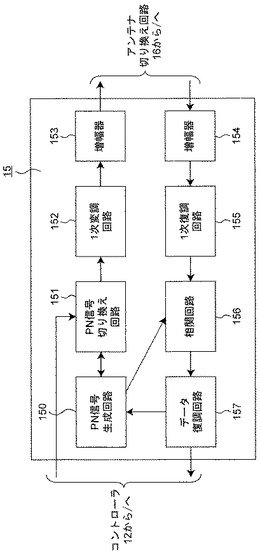
【図3】図1の無線送受信回路15の詳細構成を示すブロック図である。
【図4】図2の無線送受信回路23の詳細構成を示すブロック図である。
【図5】図1の携帯装置10の外観を示す図である。
【図6】図1の指向性アンテナ17のアンテナパターンを示す図である。
【図7】図1の無指向性アンテナ18のアンテナパターンを示す図である。
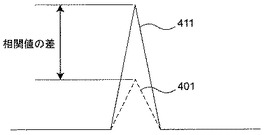
【図8】指向性アンテナ17の相関値401と無指向性アンテナ18の相関値411との差を示す図である。
【図9】図2のコントローラ21によって実行される例示的な車載装置20の車両探索処理を示すフローチャートである。
【図10】図1のコントローラ12によって実行される例示的な携帯装置10の車両探索処理を示すフローチャートである。
【図11】本発明の実施の形態2に係る例示的な車載装置20の接近通知処理を示すフローチャートである。
【図12】本発明の実施の形態3に係る例示的な車載装置20の車両探索処理を示すフローチャートである。
【図13】本発明の実施の形態3に係る例示的な携帯装置10の車両探索処理を示すフローチャートである。
【発明を実施するための形態】
【0010】
実施の形態1.
図1及び図2は、本発明の実施の形態1に係る例示的な携帯装置10及び車載装置20を示すブロック図である。携帯装置10及び車載装置20は、車載機器遠隔制御システムとして動作するとともに、その付加機能として、通信される電波を利用して車両の位置を探索することができる車両位置探索システムを構成する。
【0011】
図1を参照すると、携帯装置10において、所定方向にヌルを有する指向性アンテナ17と、無指向性アンテナ18とが設けられ、指向性アンテナ17及び無指向性アンテナ18のいずれか一方が、アンテナ切り換え回路16によって無線送受信回路15に接続される。無線送受信回路15はさらに、コントローラ12に接続される。無線送受信回路15は、指向性アンテナ17又は無指向性アンテナ18を用いて、所定の周波数(例えば315NHz)の無線信号を車載装置20との間で送受信する。車載装置20へ送信する信号は、コントローラ12で生成され、無線送受信回路15で変調されて送信される。車載装置20から受信した信号は、無線送受信回路15で復調されてコントローラ12に供給される。コントローラ12は、EEPROM等の不揮発性メモリであるメモリ13を備え、このメモリ13はIDコード及び暗号キー等を格納し、電源が遮断されてもその記憶内容を保持する。コントローラ12にはさらに、ユーザ入力を取得するユーザ入力装置11と、視覚的及び/又は聴覚的に各種情報をユーザに通知するユーザ通知装置14とが接続される。
【0012】
アンテナ切り換え回路16は、コントローラ12の制御下で、指向性アンテナ17及び無指向性アンテナ18のいずれかを無線送受信回路15に接続する。コントローラ12は、スマートキー機能や遠隔操作機能を用いるときには無指向性アンテナ18を選択するようにアンテナ切り換え回路16に指示し、ユーザ入力装置11から車両探索指示の指示信号を受信したときに、後述の車両探索処理を実行し、指向性アンテナ17及び無指向性アンテナ18を切り換えて用いるようにアンテナ切り換え回路16に指示する。実施の形態1の車両探索処理では、車載装置20に車両探索信号を送信するときに、指向性アンテナ17及び無指向性アンテナ18を切り換えて使用し、車載装置20から探索結果信号を受信するときに、無指向性アンテナ18を用いる。車両探索処理において、携帯装置10が指向性アンテナ17及び無指向性アンテナ18のいずれを用いて送信しているのかを車載装置20が判断できるように、これらのアンテナを用いて送信される信号にはそれぞれ、所定の情報が含まれる。
【0013】
図3は、図1の無線送受信回路15の詳細構成を示すブロック図である。実施の形態1において、無線送受信回路15は、スペクトル拡散された無線信号を送受信するために、PN信号を処理するPN信号生成回路150及び相関回路156等を備える。無線送受信回路15において、変調信号を生成するとき、PN信号生成回路150が複数のPN信号を生成し、次いでPN信号切り換え回路151が、コントローラ12からのデータに応じて、生成された複数のPN信号のうちのいずれかを適切に選択し、選択された信号は、1次変調回路152において位相変調され、増幅器153において増幅され、アンテナ切り換え回路16に送られる。無線送受信回路15において、車載装置20からの受信信号を復調するとき、アンテナ切り換え回路16から送られた信号が、増幅器154において増幅され、1次復調回路155において復調された後、相関回路156は、復調信号に対してスペクトル拡散信号の相関処理を実行し、データ復調回路157は、相関回路156からの相関値に基づいて受信データを判定してコントローラ12に送るとともに、データに応じたPN信号をPN信号生成回路150から相関回路156に供給させる。
【0014】
図2を参照すると、車載装置20は、携帯装置10との送受信に用いるために車両に取り付けられた無指向性アンテナ24を有する。無指向性アンテナ24は無線送受信回路23に接続され、無線送受信回路23はコントローラ21に接続される。コントローラ21は、EEPROM等の不揮発性メモリであるメモリ22を備え、このメモリ22は、携帯装置との照合に用いる質問信号やイモビライサ用のIDコード、暗号キー等を格納し、電源が遮断されてもその記憶内容を保持する。コントローラ12にはさらに、車両に設けられた装置30〜38がさらに接続される。
【0015】
ユーザ入力装置30は、ユーザによる各種スイッチ操作を検出し、その検出結果(スイッチのON/OFF位置)をコントローラ21に送る。ユーザ入力装置30には、例えば、各アウタドアハンドルに設置された、質問信号の送信を開始するための起動スイッチ、ロック解除のための交信を起動するためのキーノブスイッチ、エンジンスイッチ(始動、イグニッションオン、アクセサリオン、オフそしてロックなど)などが含まれる。ドア開閉検出センサ31は、全ドアの個別の開閉状態と、全ドアの個別の施錠及び解錠状態とを検出し、その検出結果をコントローラ21に送る。センサ群32は、車速や変速位置やエンジン運転状態を検出する各種センサであり、これらの各種センサの検出結果もコントローラ21に送られる。他の装置33〜38は、コントローラ21の制御下で動作する。ユーザ通知装置33は、ドアロック及びアンロックをした場合のいわゆるアンサーバックとして車両のライト点灯やホーン吹鳴を行うアンサーバック装置や、各種警報のためのブザー音を発生する警報装置や、状態表示のための表示装置を含んでいる。イモビライザ装置34は、エンジンへの燃料供給及びイグニッション動作を禁止する機構であり、コントローラ21による携帯装置10の認証結果に応じて、メモリ22に格納されたイモビライザ用のIDコードと暗号キーを用いて禁止解除を行う。エンジン制御装置35は、セルモータを利用してエンジンの始動を制御するとともに、エンジンの駆動停止も制御する。ステアリングロック装置36は、エンジンスイッチの位置に応じて、ステアリングのロック及びアンロックを行う機構である。ドアロック装置37は、全てのドアのロック及びアンロックを行う機構である。シフトロック装置38は、変速機ギアシフト機構(図示せず。)においてパーキングレンジからその他のレンジへの移行を禁止するロック装置であり、コントローラ21からのロック解除の許可及び不許可の信号に応じて動作する。
【0016】
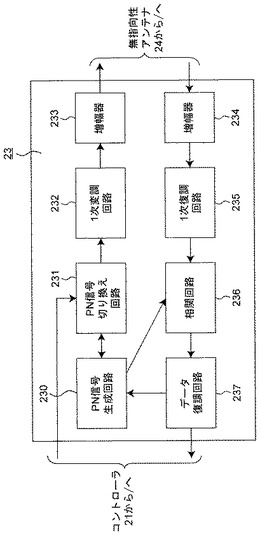
図4は、図2の無線送受信回路23の詳細構成を示すブロック図である。データを変復調する動作は、基本的には、図3に示す携帯装置10の無線送受信回路15の動作と同様である。ただし、後述の車両探索処理を実行する際に、相関回路236は、例えば受信動作時の信号強度やスペクトル拡散信号の相関値をコントローラ21に送る。
【0017】
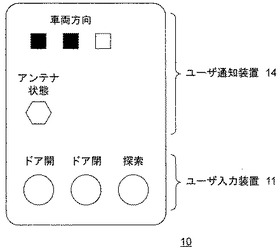
図5は、図1の携帯装置10の外観を示す図である。携帯装置10は、ユーザ入力装置11として、遠隔操作機能のためのドア開スイッチ及びドア閉スイッチに加えて、車両探索機能のための探索スイッチを備える。携帯装置10はさらに、ユーザ通知装置14として、その上部に複数のLEDを備え、車載装置20から探索結果信号を受信したときに、その内容に応じてLEDの点灯する数を変更することでユーザに通知する。なお、図5に示すユーザ通知装置はあくまでも一例であり、液晶パネルなどを用いて車両の方向及び距離を矢印とその大きさで示すなどの表示をしてもよい。また、図5に示すように。例えば、指向性アンテナ17及び無指向性アンテナ18のいずれを選択しているのかをユーザに通知するためのLEDを設けてもよい。
【0018】
次に、実施の形態1の携帯装置10及び車載装置20の動作例を説明する。
【0019】
まず、スマートキー機能の動作例を説明する。車載装置20のコントローラ21は、ユーザ入力装置30からスマートキー機能に係る信号を受信し、次いで質問信号をメモリ22から取得して、無線送受信回路23及び無指向性アンテナ24を介して携帯装置10に送信する。このとき、通常、携帯装置10は、無指向性アンテナ18を選択した状態にあり、携帯装置10のコントローラ12は、無指向性アンテナ18及び無線送受信回路15を介して車載装置20からの質問信号を受信する。質問信号を受信したコントローラ12は、スマートキー機能に係る質問応答信号を無線送受信回路15及び無指向性アンテナ18を介して車載装置20に送信する。車載装置20のコントローラ21は、無指向性アンテナ24及び無線送受信回路23を介して受信されて復調された質問応答信号に基づいて認証動作を実行し、認証が正しい場合にドア開閉などを実行する。
【0020】
次に、遠隔操作機能の動作例を説明する。遠隔操作機能の動作として携帯装置10からの遠隔操作信号を受信するために、車載装置20のコントローラ21は周期的に無線送受信回路23を起動し、携帯装置10から送信された遠隔操作信号の有無を確認する。携帯装置10からの遠隔操作信号を検出したときには、その遠隔操作信号を受信する。コントローラ21は、受信された遠隔操作信号に基づいて携帯装置10を認証し、認証が正しい場合には、その遠隔操作信号によって指示された動作(例えば、ドア解錠、ドア施錠、窓開閉等)を実行する。携帯装置10のコントローラ12は、ユーザ入力装置11を介して遠隔操作指示の指示信号が入力されたときに、その遠隔操作指示に該当する信号を生成し、無線送受信回路15及び無指向性アンテナ18を介して送信する。
【0021】
最後に、車両探索機能の動作例を説明する。携帯装置10のユーザは、始めに、車両の存在を探索したい方向に携帯装置10を向け、ユーザ入力装置11の探索ボタンを押下することで、後述の車両探索処理を開始させる。携帯装置10のコントローラ12は、無指向性アンテナ18を用いて車両探索信号を送信した後、車載装置20から探索応答信号を受信し、次いで、アンテナ切り換え回路16により指向性アンテナ17に切り換えて、指向性アンテナ17を用いて再び車両探索信号を送信する。その後、2回目の車両探索信号の送信に対する探索結果信号を受信するために、アンテナ切り換え回路16により無指向性アンテナ18に切り換えて、無指向性アンテナ18を用いて探索結果信号を受信する。車両の存在を探索したい方向に携帯装置10を向けて探索を繰り返すことで、車両位置を探索できる。
【0022】
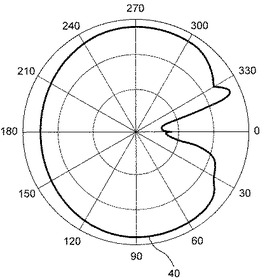
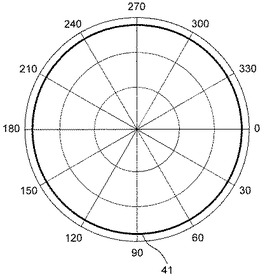
図6及び図7は、図1の指向性アンテナ17及び無指向性アンテナ18のアンテナパターンをそれぞれ示す図である。指向性アンテナ17のアンテナパターン40として、ある方向(図6の0°方向)がヌルになるパターンを示している。また、無指向性アンテナ18のアンテナパターン41では全方位にほぼ等しいゲインを有するパターンを示している。
【0023】
図8は、指向性アンテナ17の相関値401と無指向性アンテナ18の相関値411との差を示す図である。図8では、携帯装置10が指向性アンテナ17及び無指向性アンテナ18を用いてそれぞれ送信した時に、車載装置20にて得られる相関値401、402を用いて車両探索結果を算出する方法を説明する。車両探索機能の動作では、まず、携帯装置10が無指向性アンテナ18を用いて車両探索信号を送信し、車載装置20のコントローラ21は、受信された車両探索信号の相関値411を取得してメモリ22(又は、図示しない他のメモリ)に記憶する。次に、車載装置20から携帯装置10に探索応答信号を返信した後、携帯装置10が指向性アンテナ17を用いて再び車両探索信号を送信し、車載装置20のコントローラ21は、再送信された車両探索信号の相関値401を取得してメモリ22(又は、図示しない他のメモリ)に記憶する。そして、車載装置20のコントローラ21は、「無指向性アンテナ18を用いたときの相関値」と、「指向性アンテナ17を用いたときの相関値」とを比較して、これらの相関値の差があるしきい値Aを越えた場合には、指向性アンテナ17のヌルの方向が携帯装置10から車載装置20への主パスの方向に向いていると判定し、その結果を携帯装置10へ返信する。返信する結果として、相関値の差を返信してもよく、しきい値から判定した結果を返信してもよい。
【0024】
以下、図9及び図10を参照して、実施の形態1に係る例示的な車両探索処理について説明する。
【0025】
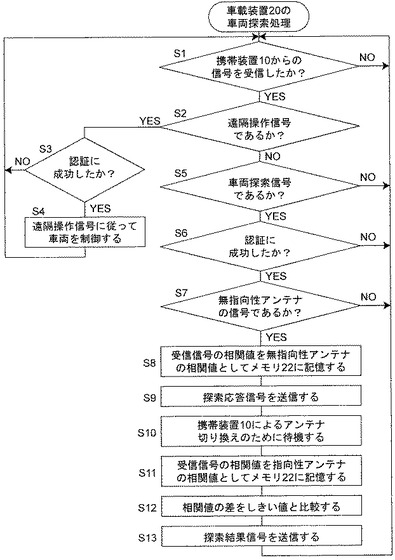
図9は、図2のコントローラ21によって実行される例示的な車載装置20の車両探索処理を示すフローチャートである。ステップS1において、携帯装置10からの信号を受信したか否かを判断し、YESのときはステップS2に進み、NOのときはさらに待機する。待機電力の節約のために、ユーザ入力装置30からスイッチ操作の検出結果の信号を受信しないうちは、コントローラ21は、一定時間のスリープをはさんで周期的に起動し、起動する毎に携帯装置10からの信号を受信したか否かを判断してもよい。ステップS2において、受信信号が遠隔操作信号であるか否かを判断し、YESのときはステップS3に進み、NOのときはステップS5に進む。ステップS3において、認証に成功したか否かを判断し、YESのときはステップS4に進み、NOのときはステップS1に戻る。ステップS4において、遠隔操作信号に従って車両を制御し(例えば、ドアロック装置37によるドアの開閉等)ステップS1に戻る。ステップS5において、受信信号が車両探索信号であるか否かを判断し、YESのときはステップS6に進み、NOのときはステップS1に戻る。ステップS6において、認証に成功したか否かを判断し、YESのときはステップS7に進み、NOのときはステップS1に戻る。ステップS7において、受信した車両探索信号が無指向性アンテナ18を用いて送信された信号であるか否かを判断し、YESのときはステップS8に進み、NOのときはステップS1に戻る。ステップS8において、受信した車両探索信号の相関値を「無指向性アンテナ18を用いたときの相関値」としてメモリ22に記憶する。ステップS9において、携帯装置10に探索応答信号を送信する。ステップS10において、携帯装置10によるアンテナ切り換えのために所定時間待機する。ステップS11において、携帯装置10からの車両探索信号(指向性アンテナ17を用いて送信された車両探索信号)をさらに受信し、受信した車両探索信号の相関値を「指向性アンテナ17を用いたときの相関値」としてメモリ22に記憶する。ステップS12において、ステップS8で記憶した相関値とステップS11で記憶した相関値との差を所定のしきい値Aと比較し、相関値の差がしきい値Aを超えているか否かを判断する。ステップS13において、ステップS12の判断結果を含む探索結果信号を携帯装置10に送信し、ステップS1に戻る。
【0026】
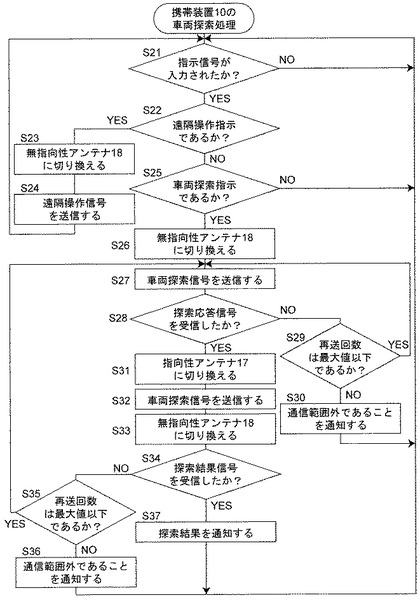
図10は、図1のコントローラ12によって実行される例示的な携帯装置10の車両探索処理を示すフローチャートである。ステップS21において、ユーザから指示信号が入力されたか否かを判断し、YESのときはステップS22に進み、NOのときはさらに待機する。ステップS22において、入力された指示信号が遠隔操作指示であるか否かを判断し、YESのときはステップS23に進み、NOのときはステップS25に進む。ステップS23において無指向性アンテナ18に切り換え、ステップS24において車載装置20に遠隔操作信号を送信し、ステップS21に戻る。ステップS25において、入力された指示信号が車両探索指示であるか否かを判断し、YESのときはステップS26に進み、NOのときはステップS21に戻る。ステップS26において無指向性アンテナ18に切り換え、ステップS27において車載装置20に車両探索信号を送信する。ステップS28において、車載装置20から探索応答信号を受信したか否かを判断し、YESのときはステップS31に進み、NOのときはステップS29に進む。ステップS29において、再送回数は最大値以下であるか否かを判断し、YESのときはステップS27に戻って車両探索信号を再送し、NOのときはステップS30に進む。ステップS30において、通信範囲外であることをユーザ通知装置14を介してユーザに通知し、ステップS21に戻る。ステップS31において、指向性アンテナ17に切り換える。ステップS32において、指向性アンテナ17を用いて、車載装置20に車両探索信号を送信する。ステップS33において、無指向性アンテナ18に切り換える。ステップS34において、車載装置20から探索結果信号を受信したか否かを判断し、YESのときはステップS37に進み、NOのときはステップS35に進む。ステップS35において、再送回数は最大値以下であるか否かを判断し、YESのときはステップS27に戻って車両探索信号を再送し、NOのときはステップS36に進む。ステップS36において、通信範囲外であることをユーザ通知装置14を介してユーザに通知し、ステップS21に戻る。ステップS37において、探索結果をユーザ通知装置14を介してユーザに通知し、ステップS21に戻る。
【0027】
実施の形態1の車両位置探索システムによれば、上記のように動作することで、車載機器遠隔制御システムの本来のスマートキー機能や遠隔操作機能には制限を与えることなく、さらに、新たなセンサの追加を必要とすることもなく、車両探索機能を実現できる。
【0028】
なお、車両の存在を探索したい方向に携帯装置10のアンテナの指向性を向ける方法としては、ユーザが直接携帯装置10を動かしてもよいし、指向性アンテナとして可変指向性アンテナを備え、携帯装置10が自動的にヌル方向(又はビーム)方向を動かしてもよい。ユーザが直接携帯装置10を動かす場合には、ユーザは、探索結果を迅速かつ簡単に知ることができる。携帯装置10が自動的にヌル方向(又はビーム)方向を動かす場合には、ユーザ通知装置14は、さらに、選択されているヌル方向(又はビーム)を表示する。携帯装置10が自動的に塗る方向(ビーム方向)を動かす方法としては、機械的にアンテナを動かす方法や、複数のアンテナでそれぞれ送受信される無線信号の位相を電気的に変化させることで指向性を変化させる方法等があり、これらを利用してもよい。自動的にアンテナ指向性を振ることで、ユーザが携帯装置10を持って方向を調べる手間を省くことができる。
【0029】
上記の説明では、無線送受信回路15、23は、相関回路156、236により、受信信号の相関値を取得している。スペクトル拡散信号の相関値は、時間積分された値なので、信号やノイズの微小変動を平滑化でき、さらに他の携帯装置の信号を分離できる。また、マルチパスの信号もある一定距離以上はなれたものは分離できるため、影響が少ない。しかしながら、スペクトル拡散信号の相関値を用いることに限定することなく、受信信号の信号強度を決定できる指標であれば、任意のものを用いることができる。
【0030】
上記の説明では、指向性アンテナ17は、ある方向がヌルになるパターンを有している。ヌルを用いることにより、アンテナパターンの落ち込みを急峻にすることができ、無指向性アンテナとの差を出しやすい。なお、本アンテナパターンは一例であり、指向性アンテナ17のアンテナパターンとして、ある方向にビームが存在するものであってもよい。また、指向性アンテナを実現する方法としては、本技術分野において知られた任意の方法を用いることができ、例えば1つのアンテナを用いて生成してもよく、複数個のアンテナを合成して生成してもよい。
【0031】
実施の形態2.
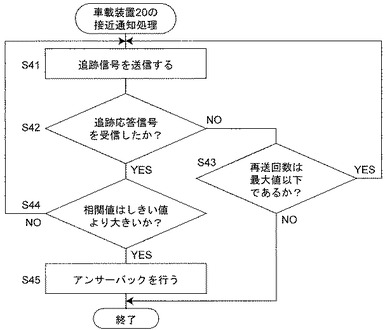
図11は、本発明の実施の形態2に係る例示的な車載装置20の接近通知処理を示すフローチャートである。実施の形態2に係る接近通知処理は、車両探索処理によって車両の位置が発見された後、定期的に携帯装置10と車載装置20が信号を送受信し、車載装置20における受信信号の相関値があるしきい値を超えたときに車載装置20がアンサーバックとしてライト点灯やホーン吹鳴を行う動作である。車載装置20の接近通知処理は、例えば、図9のステップS13を実行後に引き続いて実行される。
【0032】
図11を参照すると、ステップS41において、車載装置20は、携帯装置10に追跡信号を送信する。ステップS41の実行前に、ある一定時間スリープしてもよい。ステップS42において、携帯装置10から追跡応答信号を受信したか否かを判断し、YESのときはステップS44に進み、NOのときはステップS43に進む。ステップS43において、再送回数は最大値以下であるか否かを判断し、YESのときはステップS41に戻って追跡信号を再送し、NOのときは、通信範囲外に携帯装置10が移動したと判断し、処理を終了する。ステップS44において、受信した追跡信号の相関値が所定のしきい値Bより大きいか否かを判断し、YESのときはステップS45に進み、NOのときはステップS41に戻って追跡信号を再送する。ステップS44がYESのとき、携帯装置10が車両に対してある距離に接近したと判定し、ステップS45において、アンサーバック(ライト点灯やホーン吹鳴等)を行い、処理を終了する。なお、前述のように、ホーン及びライト等は、車載装置20のユーザ通知装置33に含まれる。
【0033】
車載装置20の接近通知処理は、図9のステップS13を実行後に限定されることなく、車両探索処理とは独立して任意のタイミングで実行されてもよい。
【0034】
また、携帯装置10は、車載装置20からの追跡信号に対して応答するために、対応する携帯装置10の接近通知処理を実行するが、このとき、追跡信号に対して常時応答してもよく、探索結果信号を受信後、一定時間だけ応答してもよい。
【0035】
このような接近通知処理を実行することにより、携帯装置10が車両に接近したことを検出できるので、ユーザが車両から遠く離れていてホーンやライトの動作を認識困難であるにも関わらずホーンやライトを使ってアンサーバックすることを防止でき、むやみにライトやホーンを動作させて、他の周辺ユーザに迷惑になることを防ぐことができる。
【0036】
実施の形態3.
実施の形態1では、車載装置20が「無指向性アンテナ18を用いたときの相関値」と「指向性アンテナ17を用いたときの相関値」との差をしきい値Aと比較して車両位置の探索結果を判定したが、実施の形態3では、携帯装置10が上記の比較及び判定を実行する。
【0037】
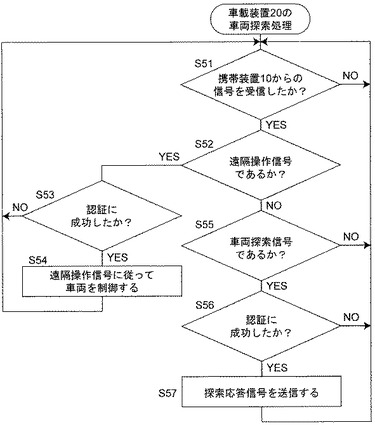
図12は、本発明の実施の形態3に係る例示的な車載装置20の車両探索処理を示すフローチャートである。ステップS51において、携帯装置10からの信号を受信したか否かを判断し、YESのときはステップS52に進み、NOのときはさらに待機する。待機電力の節約のために、ユーザ入力装置30からスイッチ操作の検出結果の信号を受信しないうちは、コントローラ21は、一定時間のスリープをはさんで周期的に起動し、起動する毎に携帯装置10からの信号を受信したか否かを判断してもよい。ステップS52において、受信信号が遠隔操作信号であるか否かを判断し、YESのときはステップS53に進み、NOのときはステップS55に進む。ステップS53において、認証に成功したか否かを判断し、YESのときはステップS54に進み、NOのときはステップS51に戻る。ステップS54において、遠隔操作信号に従って車両を制御し、ステップS51に戻る。ステップS55において、受信信号が車両探索信号であるか否かを判断し、YESのときはステップS56に進み、NOのときはステップS51に戻る。ステップS56において、認証に成功したか否かを判断し、YESのときはステップS57に進み、NOのときはステップS51に戻る。ステップS57において、携帯装置10に探索応答信号を送信し、ステップS51に戻る。
【0038】
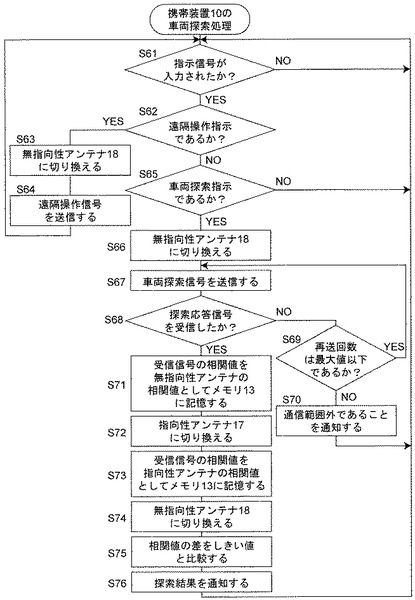
図13は、本発明の実施の形態3に係る例示的な携帯装置10の車両探索処理を示すフローチャートである。ステップS61において、指示信号が入力されたか否かを判断し、YESのときはステップS62に進み、NOのときはさらに待機する。ステップS62において、指示信号が遠隔操作指示であるか否かを判断し、YESのときはステップS63に進み、NOのときはステップS65に進む。ステップS63において、無指向性アンテナ18に切り換える。ステップS64において、無指向性アンテナ18を用いて車載装置20に遠隔操作信号を送信する。ステップS65において、指示信号が車両探索指示であるか否かを判断し、YESのときはステップS66に進み、NOのときはステップS61に戻る。ステップS66において、無指向性アンテナ18に切り換える。ステップS67において、無指向性アンテナ18を用いて車載装置20に車両探索信号を送信する。ステップS68において、車載装置20から探索応答信号を受信したか否かを判断し、YESのときはステップS71に進み、NOのときはステップS69に進む。ステップS69において、再送回数は最大値以下であるか否かを判断し、YESのときはステップS67に戻って車両探索信号を再送し、NOのときはステップS70に進む。ステップS70において、通信範囲外であることを通知する。ステップS71において、受信した車両応答信号の相関値を「無指向性アンテナを用いたときの相関値」としてメモリ13に記憶する。なお、実施の形態3では、携帯装置10の無線送受信回路15は、図4に示した車載装置20の無線送受信回路23と同様に、受信信号の相関値を取得できるように構成される。ステップS72において、指向性アンテナ17に切り換える。ステップS73において、車載装置20は、探索応答信号を引き続いて送信しているので、携帯装置10のコントローラ12は、受信した車両応答信号の相関値を「指向性アンテナを用いたときの相関値」としてメモリ13に記憶する。ステップS74において、無指向性アンテナ18に切り換える。ステップS75において、ステップS71で記憶した相関値とステップS73で記憶した相関値との差を所定のしきい値Aと比較し、相関値の差がしきい値Aを超えているか否かを判断する。上記の比較及び判断自体は、実施の形態1において車載装置20のコントローラ21が実行したものと同じである。ステップS76において、探索結果をユーザ通知装置14を介してユーザに通知して、ステップS61に戻る。
【0039】
実施の形態3の車両位置探索システムによれば、上記のように、携帯装置10のコントローラ12によって相関値の取得、相関値の差としきい値との比較、及び車両位置の判定を実行することで、判定結果を車載装置20から携帯装置10に送信する必要がなく、送信エラー等による探索結果の取得失敗を防止できる。
【0040】
また、実施の形態3の車両位置探索システムの構成と、実施の形態1及び2の車両位置探索システムに関連して説明した構成を組み合わせてもよい。例えば、図12のステップS57の実行後(又は他のタイミングで)に、図11の接近通知処理を実行してもよい。
【産業上の利用可能性】
【0041】
本発明によれば、車載機器遠隔制御システムを用いた車両位置探索システムであって、車載機器遠隔制御システムの本来の機能に制限を加えることなく、また、新たなセンサの追加を必要とすることもなく、車両の位置を探索してユーザに通知することができる車両位置探索システムを提供することができる。
【符号の説明】
【0042】
10 携帯装置、11 携帯装置10のユーザ入力装置、12 携帯装置10のコントローラ、13 携帯装置10のメモリ、14 携帯装置10のユーザ通知装置、15 携帯装置10の無線送受信回路、16 アンテナ切り換え回路、17 指向性アンテナ、18 携帯装置10の無指向性アンテナ、20 車載装置、21 車載装置20のコントローラ、22 車載装置20のメモリ、23 車載装置20の無線送受信回路、24 車載装置20の無指向性アンテナ、30 車載装置20のユーザ入力装置、31 ドア開閉検出センサ、32 センサ群、33 車載装置20のユーザ通知装置、34 イモビライザ装置、35 エンジン制御装置、36 ステアリングロック装置、37 ドアロック装置、38 シフトロック装置、150 携帯装置10のPN信号生成回路、151 携帯装置10のPN信号切り換え回路、152 携帯装置10の1次変調回路、153 携帯装置10の増幅器、154 携帯装置10の増幅器、155 携帯装置10の1次復調回路、156 携帯装置10の相関回路、157 携帯装置10のデータ復調回路、230 車載装置20のPN信号生成回路、231 車載装置20のPN信号切り換え回路、232 車載装置20の1次変調回路、233 車載装置20の増幅器、234 車載装置20の増幅器、235 車載装置20の1次復調回路、236 車載装置20の相関回路、
237 車載装置20のデータ復調回路、40 指向性アンテナ17のアンテナパターン、41 無指向性アンテナ18のアンテナパターン。
【技術分野】
【0001】
本発明は、車載機器遠隔制御システム(すなわち、車載装置及び携帯装置からなるシステムであって、車載装置が携帯装置と通信してコード照合を行い、照合結果に基づいて、携帯装置のユーザによる車両の使用を許可又は不許可するように制御するシステム)において、その付加機能として、通信される電波を利用して車両の位置を探索する車両位置探索システムに関する。
【背景技術】
【0002】
従来から、車載機器遠隔制御システムとして、携帯型の遠隔制御装置(携帯装置)を操作して車両のドアの施錠及び解錠を行う遠隔操作機能に加えて、携帯装置を操作することなく、車載装置からの質問信号に対して携帯装置が所定のコード信号を返信し、返信されたコード信号の照合結果に応じて車載装置がドアの施錠及び解錠を行うスマートキー機能を有する装置がある。さらに、車載機器遠隔制御システムの付加機能として、携帯装置と車載装置が通信する電波を用いて車両の位置を探索するものがある。
【0003】
例えば、特許文献1は、携帯装置に複数個の指向性アンテナを設け、各アンテナの受信電界レベルを用いて、車両の方向や距離を探索することを提案している。また、特許文献2は、車載装置側に複数個の指向性アンテナを設けるとともに車載装置と携帯装置に地磁気センサを設けて、車載装置と携帯装置が絶対方位を知る手段を設けることで、車載装置から使用中の指向性アンテナが向いている絶対方位を示す信号を送信し、携帯装置側にてその信号を受信することで車両の方向を探索する方法を提案している。また、特許文献3は、携帯装置にGPSセンサを搭載し、停車時の位置情報をGPSセンサで取得して記憶し、車両の位置を探索するときにも現在の位置情報をGPSセンサで取得して、記憶している停車時の位置情報と比較して探索することを提案している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平10-232999号公報(3ページ右側23〜24行、図2)。
【特許文献2】特開2006-125983号公報(4ページ47行〜5ページ4行、5ページ36〜41行、図1)。
【特許文献3】特開平6-84092号公報(2ページ右側15〜27行目、図1)。
【発明の概要】
【発明が解決しようとする課題】
【0005】
車載機器遠隔制御システムは、本来、車載装置と携帯装置との間の通信によるコード照合を行って、その照合結果に基づいて、携帯装置のユーザによる車両の使用を許可又は不許可するように制御するものである(遠隔操作機能及びスマートキー機能)。車両探索機能を実現するために携帯装置において無指向性アンテナではなく指向性アンテナのみを設けた場合には、その本来の機能のための通信を行う際に、携帯装置の通信方向を制限したり、指向性アンテナの切り換えのために通信時間が増大したりするという課題があった。また、車両位置探索システムを実現するために地磁気センサやGPSセンサ等のセンサを用いるという提案があったが、コストや消費電力が増加するなどの課題があった。
【0006】
本発明の目的は、上記の問題点を解決し、車載機器遠隔制御システムを用いた車両位置探索システムであって、車載機器遠隔制御システムの本来の機能に制限を加えることなく、また、新たなセンサの追加を必要とすることもなく、車両の位置を探索してユーザに通知することができる車両位置探索システムを提供することを目的としている。
【課題を解決するための手段】
【0007】
本発明の態様に係る車両位置探索システムは、
無線通信手段をそれぞれ備えた車載装置及び携帯装置を含む車両位置探索システムにおいて、
上記携帯装置の無線通信手段は、無指向性アンテナ及び指向性アンテナを備え、
上記携帯装置は、ユーザ入力情報を取得する入力手段及びユーザに通知する通知手段を備え、
上記携帯装置は、上記入力手段から指示信号が送られたとき、無指向性アンテナを用いて第1の車両探索信号を車載装置に送信し、指向性アンテナを用いて第2の車両探索信号を車載装置に送信し、
上記車載装置は、上記第1の車両探索信号の信号強度と、上記第2の車両探索信号の信号強度とを取得し、上記第1の車両探索信号の信号強度と上記第2の車両探索信号の信号強度との差が第1のしきい値より大きいか否かを判断し、判断結果を上記携帯装置に送信し、
上記携帯装置は、上記送信された判断結果を上記通知手段に出力することを特徴とする。
【発明の効果】
【0008】
本発明は、携帯装置において、無指向性アンテナ及び指向性アンテナと、ユーザ入力装置から車両探索指示が送られたアンテナを切り換えるアンテナ切り換え回路と、例えばスペクトル拡散を用いて変復調する無線送受信回路とを設け、車載装置において、無指向性アンテナと、例えばスペクトル拡散を用いて変復調し、復調した信号とともにそのときの相関値をコントローラに出力する無線送受信回路と、携帯装置が無指向性アンテナで送信した時の相関値と指向性アンテナで送信した時の相関値とを比較して車両方向判定し、その結果を携帯装置に伝えるための信号を生成するコントローラとを設けたことを特徴とする。これにより、通常のスマートキー動作を行う際には、携帯装置は無指向性アンテナを用いることができ、指向性アンテナしか持たないために通信方向を制限してしまう等の弊害を生じることない。車両探索を行う際には、無指向性アンテナと指向性アンテナの相関値を比較することで、混信や干渉、マルチパスの影響を軽減でき、精度良く車両位置を探索することができ、さらに指向性アンテナにて携帯装置の基準方向が判別できるため、地磁気センサやGPS等他のセンサを追加することがない、といった従来にない効果を奏するものである。
【図面の簡単な説明】
【0009】
【図1】本発明の実施の形態1に係る例示的な携帯装置10を示すブロック図である。
【図2】本発明の実施の形態1に係る例示的な車載装置20を示すブロック図である。
【図3】図1の無線送受信回路15の詳細構成を示すブロック図である。
【図4】図2の無線送受信回路23の詳細構成を示すブロック図である。
【図5】図1の携帯装置10の外観を示す図である。
【図6】図1の指向性アンテナ17のアンテナパターンを示す図である。
【図7】図1の無指向性アンテナ18のアンテナパターンを示す図である。
【図8】指向性アンテナ17の相関値401と無指向性アンテナ18の相関値411との差を示す図である。
【図9】図2のコントローラ21によって実行される例示的な車載装置20の車両探索処理を示すフローチャートである。
【図10】図1のコントローラ12によって実行される例示的な携帯装置10の車両探索処理を示すフローチャートである。
【図11】本発明の実施の形態2に係る例示的な車載装置20の接近通知処理を示すフローチャートである。
【図12】本発明の実施の形態3に係る例示的な車載装置20の車両探索処理を示すフローチャートである。
【図13】本発明の実施の形態3に係る例示的な携帯装置10の車両探索処理を示すフローチャートである。
【発明を実施するための形態】
【0010】
実施の形態1.
図1及び図2は、本発明の実施の形態1に係る例示的な携帯装置10及び車載装置20を示すブロック図である。携帯装置10及び車載装置20は、車載機器遠隔制御システムとして動作するとともに、その付加機能として、通信される電波を利用して車両の位置を探索することができる車両位置探索システムを構成する。
【0011】
図1を参照すると、携帯装置10において、所定方向にヌルを有する指向性アンテナ17と、無指向性アンテナ18とが設けられ、指向性アンテナ17及び無指向性アンテナ18のいずれか一方が、アンテナ切り換え回路16によって無線送受信回路15に接続される。無線送受信回路15はさらに、コントローラ12に接続される。無線送受信回路15は、指向性アンテナ17又は無指向性アンテナ18を用いて、所定の周波数(例えば315NHz)の無線信号を車載装置20との間で送受信する。車載装置20へ送信する信号は、コントローラ12で生成され、無線送受信回路15で変調されて送信される。車載装置20から受信した信号は、無線送受信回路15で復調されてコントローラ12に供給される。コントローラ12は、EEPROM等の不揮発性メモリであるメモリ13を備え、このメモリ13はIDコード及び暗号キー等を格納し、電源が遮断されてもその記憶内容を保持する。コントローラ12にはさらに、ユーザ入力を取得するユーザ入力装置11と、視覚的及び/又は聴覚的に各種情報をユーザに通知するユーザ通知装置14とが接続される。
【0012】
アンテナ切り換え回路16は、コントローラ12の制御下で、指向性アンテナ17及び無指向性アンテナ18のいずれかを無線送受信回路15に接続する。コントローラ12は、スマートキー機能や遠隔操作機能を用いるときには無指向性アンテナ18を選択するようにアンテナ切り換え回路16に指示し、ユーザ入力装置11から車両探索指示の指示信号を受信したときに、後述の車両探索処理を実行し、指向性アンテナ17及び無指向性アンテナ18を切り換えて用いるようにアンテナ切り換え回路16に指示する。実施の形態1の車両探索処理では、車載装置20に車両探索信号を送信するときに、指向性アンテナ17及び無指向性アンテナ18を切り換えて使用し、車載装置20から探索結果信号を受信するときに、無指向性アンテナ18を用いる。車両探索処理において、携帯装置10が指向性アンテナ17及び無指向性アンテナ18のいずれを用いて送信しているのかを車載装置20が判断できるように、これらのアンテナを用いて送信される信号にはそれぞれ、所定の情報が含まれる。
【0013】
図3は、図1の無線送受信回路15の詳細構成を示すブロック図である。実施の形態1において、無線送受信回路15は、スペクトル拡散された無線信号を送受信するために、PN信号を処理するPN信号生成回路150及び相関回路156等を備える。無線送受信回路15において、変調信号を生成するとき、PN信号生成回路150が複数のPN信号を生成し、次いでPN信号切り換え回路151が、コントローラ12からのデータに応じて、生成された複数のPN信号のうちのいずれかを適切に選択し、選択された信号は、1次変調回路152において位相変調され、増幅器153において増幅され、アンテナ切り換え回路16に送られる。無線送受信回路15において、車載装置20からの受信信号を復調するとき、アンテナ切り換え回路16から送られた信号が、増幅器154において増幅され、1次復調回路155において復調された後、相関回路156は、復調信号に対してスペクトル拡散信号の相関処理を実行し、データ復調回路157は、相関回路156からの相関値に基づいて受信データを判定してコントローラ12に送るとともに、データに応じたPN信号をPN信号生成回路150から相関回路156に供給させる。
【0014】
図2を参照すると、車載装置20は、携帯装置10との送受信に用いるために車両に取り付けられた無指向性アンテナ24を有する。無指向性アンテナ24は無線送受信回路23に接続され、無線送受信回路23はコントローラ21に接続される。コントローラ21は、EEPROM等の不揮発性メモリであるメモリ22を備え、このメモリ22は、携帯装置との照合に用いる質問信号やイモビライサ用のIDコード、暗号キー等を格納し、電源が遮断されてもその記憶内容を保持する。コントローラ12にはさらに、車両に設けられた装置30〜38がさらに接続される。
【0015】
ユーザ入力装置30は、ユーザによる各種スイッチ操作を検出し、その検出結果(スイッチのON/OFF位置)をコントローラ21に送る。ユーザ入力装置30には、例えば、各アウタドアハンドルに設置された、質問信号の送信を開始するための起動スイッチ、ロック解除のための交信を起動するためのキーノブスイッチ、エンジンスイッチ(始動、イグニッションオン、アクセサリオン、オフそしてロックなど)などが含まれる。ドア開閉検出センサ31は、全ドアの個別の開閉状態と、全ドアの個別の施錠及び解錠状態とを検出し、その検出結果をコントローラ21に送る。センサ群32は、車速や変速位置やエンジン運転状態を検出する各種センサであり、これらの各種センサの検出結果もコントローラ21に送られる。他の装置33〜38は、コントローラ21の制御下で動作する。ユーザ通知装置33は、ドアロック及びアンロックをした場合のいわゆるアンサーバックとして車両のライト点灯やホーン吹鳴を行うアンサーバック装置や、各種警報のためのブザー音を発生する警報装置や、状態表示のための表示装置を含んでいる。イモビライザ装置34は、エンジンへの燃料供給及びイグニッション動作を禁止する機構であり、コントローラ21による携帯装置10の認証結果に応じて、メモリ22に格納されたイモビライザ用のIDコードと暗号キーを用いて禁止解除を行う。エンジン制御装置35は、セルモータを利用してエンジンの始動を制御するとともに、エンジンの駆動停止も制御する。ステアリングロック装置36は、エンジンスイッチの位置に応じて、ステアリングのロック及びアンロックを行う機構である。ドアロック装置37は、全てのドアのロック及びアンロックを行う機構である。シフトロック装置38は、変速機ギアシフト機構(図示せず。)においてパーキングレンジからその他のレンジへの移行を禁止するロック装置であり、コントローラ21からのロック解除の許可及び不許可の信号に応じて動作する。
【0016】
図4は、図2の無線送受信回路23の詳細構成を示すブロック図である。データを変復調する動作は、基本的には、図3に示す携帯装置10の無線送受信回路15の動作と同様である。ただし、後述の車両探索処理を実行する際に、相関回路236は、例えば受信動作時の信号強度やスペクトル拡散信号の相関値をコントローラ21に送る。
【0017】
図5は、図1の携帯装置10の外観を示す図である。携帯装置10は、ユーザ入力装置11として、遠隔操作機能のためのドア開スイッチ及びドア閉スイッチに加えて、車両探索機能のための探索スイッチを備える。携帯装置10はさらに、ユーザ通知装置14として、その上部に複数のLEDを備え、車載装置20から探索結果信号を受信したときに、その内容に応じてLEDの点灯する数を変更することでユーザに通知する。なお、図5に示すユーザ通知装置はあくまでも一例であり、液晶パネルなどを用いて車両の方向及び距離を矢印とその大きさで示すなどの表示をしてもよい。また、図5に示すように。例えば、指向性アンテナ17及び無指向性アンテナ18のいずれを選択しているのかをユーザに通知するためのLEDを設けてもよい。
【0018】
次に、実施の形態1の携帯装置10及び車載装置20の動作例を説明する。
【0019】
まず、スマートキー機能の動作例を説明する。車載装置20のコントローラ21は、ユーザ入力装置30からスマートキー機能に係る信号を受信し、次いで質問信号をメモリ22から取得して、無線送受信回路23及び無指向性アンテナ24を介して携帯装置10に送信する。このとき、通常、携帯装置10は、無指向性アンテナ18を選択した状態にあり、携帯装置10のコントローラ12は、無指向性アンテナ18及び無線送受信回路15を介して車載装置20からの質問信号を受信する。質問信号を受信したコントローラ12は、スマートキー機能に係る質問応答信号を無線送受信回路15及び無指向性アンテナ18を介して車載装置20に送信する。車載装置20のコントローラ21は、無指向性アンテナ24及び無線送受信回路23を介して受信されて復調された質問応答信号に基づいて認証動作を実行し、認証が正しい場合にドア開閉などを実行する。
【0020】
次に、遠隔操作機能の動作例を説明する。遠隔操作機能の動作として携帯装置10からの遠隔操作信号を受信するために、車載装置20のコントローラ21は周期的に無線送受信回路23を起動し、携帯装置10から送信された遠隔操作信号の有無を確認する。携帯装置10からの遠隔操作信号を検出したときには、その遠隔操作信号を受信する。コントローラ21は、受信された遠隔操作信号に基づいて携帯装置10を認証し、認証が正しい場合には、その遠隔操作信号によって指示された動作(例えば、ドア解錠、ドア施錠、窓開閉等)を実行する。携帯装置10のコントローラ12は、ユーザ入力装置11を介して遠隔操作指示の指示信号が入力されたときに、その遠隔操作指示に該当する信号を生成し、無線送受信回路15及び無指向性アンテナ18を介して送信する。
【0021】
最後に、車両探索機能の動作例を説明する。携帯装置10のユーザは、始めに、車両の存在を探索したい方向に携帯装置10を向け、ユーザ入力装置11の探索ボタンを押下することで、後述の車両探索処理を開始させる。携帯装置10のコントローラ12は、無指向性アンテナ18を用いて車両探索信号を送信した後、車載装置20から探索応答信号を受信し、次いで、アンテナ切り換え回路16により指向性アンテナ17に切り換えて、指向性アンテナ17を用いて再び車両探索信号を送信する。その後、2回目の車両探索信号の送信に対する探索結果信号を受信するために、アンテナ切り換え回路16により無指向性アンテナ18に切り換えて、無指向性アンテナ18を用いて探索結果信号を受信する。車両の存在を探索したい方向に携帯装置10を向けて探索を繰り返すことで、車両位置を探索できる。
【0022】
図6及び図7は、図1の指向性アンテナ17及び無指向性アンテナ18のアンテナパターンをそれぞれ示す図である。指向性アンテナ17のアンテナパターン40として、ある方向(図6の0°方向)がヌルになるパターンを示している。また、無指向性アンテナ18のアンテナパターン41では全方位にほぼ等しいゲインを有するパターンを示している。
【0023】
図8は、指向性アンテナ17の相関値401と無指向性アンテナ18の相関値411との差を示す図である。図8では、携帯装置10が指向性アンテナ17及び無指向性アンテナ18を用いてそれぞれ送信した時に、車載装置20にて得られる相関値401、402を用いて車両探索結果を算出する方法を説明する。車両探索機能の動作では、まず、携帯装置10が無指向性アンテナ18を用いて車両探索信号を送信し、車載装置20のコントローラ21は、受信された車両探索信号の相関値411を取得してメモリ22(又は、図示しない他のメモリ)に記憶する。次に、車載装置20から携帯装置10に探索応答信号を返信した後、携帯装置10が指向性アンテナ17を用いて再び車両探索信号を送信し、車載装置20のコントローラ21は、再送信された車両探索信号の相関値401を取得してメモリ22(又は、図示しない他のメモリ)に記憶する。そして、車載装置20のコントローラ21は、「無指向性アンテナ18を用いたときの相関値」と、「指向性アンテナ17を用いたときの相関値」とを比較して、これらの相関値の差があるしきい値Aを越えた場合には、指向性アンテナ17のヌルの方向が携帯装置10から車載装置20への主パスの方向に向いていると判定し、その結果を携帯装置10へ返信する。返信する結果として、相関値の差を返信してもよく、しきい値から判定した結果を返信してもよい。
【0024】
以下、図9及び図10を参照して、実施の形態1に係る例示的な車両探索処理について説明する。
【0025】
図9は、図2のコントローラ21によって実行される例示的な車載装置20の車両探索処理を示すフローチャートである。ステップS1において、携帯装置10からの信号を受信したか否かを判断し、YESのときはステップS2に進み、NOのときはさらに待機する。待機電力の節約のために、ユーザ入力装置30からスイッチ操作の検出結果の信号を受信しないうちは、コントローラ21は、一定時間のスリープをはさんで周期的に起動し、起動する毎に携帯装置10からの信号を受信したか否かを判断してもよい。ステップS2において、受信信号が遠隔操作信号であるか否かを判断し、YESのときはステップS3に進み、NOのときはステップS5に進む。ステップS3において、認証に成功したか否かを判断し、YESのときはステップS4に進み、NOのときはステップS1に戻る。ステップS4において、遠隔操作信号に従って車両を制御し(例えば、ドアロック装置37によるドアの開閉等)ステップS1に戻る。ステップS5において、受信信号が車両探索信号であるか否かを判断し、YESのときはステップS6に進み、NOのときはステップS1に戻る。ステップS6において、認証に成功したか否かを判断し、YESのときはステップS7に進み、NOのときはステップS1に戻る。ステップS7において、受信した車両探索信号が無指向性アンテナ18を用いて送信された信号であるか否かを判断し、YESのときはステップS8に進み、NOのときはステップS1に戻る。ステップS8において、受信した車両探索信号の相関値を「無指向性アンテナ18を用いたときの相関値」としてメモリ22に記憶する。ステップS9において、携帯装置10に探索応答信号を送信する。ステップS10において、携帯装置10によるアンテナ切り換えのために所定時間待機する。ステップS11において、携帯装置10からの車両探索信号(指向性アンテナ17を用いて送信された車両探索信号)をさらに受信し、受信した車両探索信号の相関値を「指向性アンテナ17を用いたときの相関値」としてメモリ22に記憶する。ステップS12において、ステップS8で記憶した相関値とステップS11で記憶した相関値との差を所定のしきい値Aと比較し、相関値の差がしきい値Aを超えているか否かを判断する。ステップS13において、ステップS12の判断結果を含む探索結果信号を携帯装置10に送信し、ステップS1に戻る。
【0026】
図10は、図1のコントローラ12によって実行される例示的な携帯装置10の車両探索処理を示すフローチャートである。ステップS21において、ユーザから指示信号が入力されたか否かを判断し、YESのときはステップS22に進み、NOのときはさらに待機する。ステップS22において、入力された指示信号が遠隔操作指示であるか否かを判断し、YESのときはステップS23に進み、NOのときはステップS25に進む。ステップS23において無指向性アンテナ18に切り換え、ステップS24において車載装置20に遠隔操作信号を送信し、ステップS21に戻る。ステップS25において、入力された指示信号が車両探索指示であるか否かを判断し、YESのときはステップS26に進み、NOのときはステップS21に戻る。ステップS26において無指向性アンテナ18に切り換え、ステップS27において車載装置20に車両探索信号を送信する。ステップS28において、車載装置20から探索応答信号を受信したか否かを判断し、YESのときはステップS31に進み、NOのときはステップS29に進む。ステップS29において、再送回数は最大値以下であるか否かを判断し、YESのときはステップS27に戻って車両探索信号を再送し、NOのときはステップS30に進む。ステップS30において、通信範囲外であることをユーザ通知装置14を介してユーザに通知し、ステップS21に戻る。ステップS31において、指向性アンテナ17に切り換える。ステップS32において、指向性アンテナ17を用いて、車載装置20に車両探索信号を送信する。ステップS33において、無指向性アンテナ18に切り換える。ステップS34において、車載装置20から探索結果信号を受信したか否かを判断し、YESのときはステップS37に進み、NOのときはステップS35に進む。ステップS35において、再送回数は最大値以下であるか否かを判断し、YESのときはステップS27に戻って車両探索信号を再送し、NOのときはステップS36に進む。ステップS36において、通信範囲外であることをユーザ通知装置14を介してユーザに通知し、ステップS21に戻る。ステップS37において、探索結果をユーザ通知装置14を介してユーザに通知し、ステップS21に戻る。
【0027】
実施の形態1の車両位置探索システムによれば、上記のように動作することで、車載機器遠隔制御システムの本来のスマートキー機能や遠隔操作機能には制限を与えることなく、さらに、新たなセンサの追加を必要とすることもなく、車両探索機能を実現できる。
【0028】
なお、車両の存在を探索したい方向に携帯装置10のアンテナの指向性を向ける方法としては、ユーザが直接携帯装置10を動かしてもよいし、指向性アンテナとして可変指向性アンテナを備え、携帯装置10が自動的にヌル方向(又はビーム)方向を動かしてもよい。ユーザが直接携帯装置10を動かす場合には、ユーザは、探索結果を迅速かつ簡単に知ることができる。携帯装置10が自動的にヌル方向(又はビーム)方向を動かす場合には、ユーザ通知装置14は、さらに、選択されているヌル方向(又はビーム)を表示する。携帯装置10が自動的に塗る方向(ビーム方向)を動かす方法としては、機械的にアンテナを動かす方法や、複数のアンテナでそれぞれ送受信される無線信号の位相を電気的に変化させることで指向性を変化させる方法等があり、これらを利用してもよい。自動的にアンテナ指向性を振ることで、ユーザが携帯装置10を持って方向を調べる手間を省くことができる。
【0029】
上記の説明では、無線送受信回路15、23は、相関回路156、236により、受信信号の相関値を取得している。スペクトル拡散信号の相関値は、時間積分された値なので、信号やノイズの微小変動を平滑化でき、さらに他の携帯装置の信号を分離できる。また、マルチパスの信号もある一定距離以上はなれたものは分離できるため、影響が少ない。しかしながら、スペクトル拡散信号の相関値を用いることに限定することなく、受信信号の信号強度を決定できる指標であれば、任意のものを用いることができる。
【0030】
上記の説明では、指向性アンテナ17は、ある方向がヌルになるパターンを有している。ヌルを用いることにより、アンテナパターンの落ち込みを急峻にすることができ、無指向性アンテナとの差を出しやすい。なお、本アンテナパターンは一例であり、指向性アンテナ17のアンテナパターンとして、ある方向にビームが存在するものであってもよい。また、指向性アンテナを実現する方法としては、本技術分野において知られた任意の方法を用いることができ、例えば1つのアンテナを用いて生成してもよく、複数個のアンテナを合成して生成してもよい。
【0031】
実施の形態2.
図11は、本発明の実施の形態2に係る例示的な車載装置20の接近通知処理を示すフローチャートである。実施の形態2に係る接近通知処理は、車両探索処理によって車両の位置が発見された後、定期的に携帯装置10と車載装置20が信号を送受信し、車載装置20における受信信号の相関値があるしきい値を超えたときに車載装置20がアンサーバックとしてライト点灯やホーン吹鳴を行う動作である。車載装置20の接近通知処理は、例えば、図9のステップS13を実行後に引き続いて実行される。
【0032】
図11を参照すると、ステップS41において、車載装置20は、携帯装置10に追跡信号を送信する。ステップS41の実行前に、ある一定時間スリープしてもよい。ステップS42において、携帯装置10から追跡応答信号を受信したか否かを判断し、YESのときはステップS44に進み、NOのときはステップS43に進む。ステップS43において、再送回数は最大値以下であるか否かを判断し、YESのときはステップS41に戻って追跡信号を再送し、NOのときは、通信範囲外に携帯装置10が移動したと判断し、処理を終了する。ステップS44において、受信した追跡信号の相関値が所定のしきい値Bより大きいか否かを判断し、YESのときはステップS45に進み、NOのときはステップS41に戻って追跡信号を再送する。ステップS44がYESのとき、携帯装置10が車両に対してある距離に接近したと判定し、ステップS45において、アンサーバック(ライト点灯やホーン吹鳴等)を行い、処理を終了する。なお、前述のように、ホーン及びライト等は、車載装置20のユーザ通知装置33に含まれる。
【0033】
車載装置20の接近通知処理は、図9のステップS13を実行後に限定されることなく、車両探索処理とは独立して任意のタイミングで実行されてもよい。
【0034】
また、携帯装置10は、車載装置20からの追跡信号に対して応答するために、対応する携帯装置10の接近通知処理を実行するが、このとき、追跡信号に対して常時応答してもよく、探索結果信号を受信後、一定時間だけ応答してもよい。
【0035】
このような接近通知処理を実行することにより、携帯装置10が車両に接近したことを検出できるので、ユーザが車両から遠く離れていてホーンやライトの動作を認識困難であるにも関わらずホーンやライトを使ってアンサーバックすることを防止でき、むやみにライトやホーンを動作させて、他の周辺ユーザに迷惑になることを防ぐことができる。
【0036】
実施の形態3.
実施の形態1では、車載装置20が「無指向性アンテナ18を用いたときの相関値」と「指向性アンテナ17を用いたときの相関値」との差をしきい値Aと比較して車両位置の探索結果を判定したが、実施の形態3では、携帯装置10が上記の比較及び判定を実行する。
【0037】
図12は、本発明の実施の形態3に係る例示的な車載装置20の車両探索処理を示すフローチャートである。ステップS51において、携帯装置10からの信号を受信したか否かを判断し、YESのときはステップS52に進み、NOのときはさらに待機する。待機電力の節約のために、ユーザ入力装置30からスイッチ操作の検出結果の信号を受信しないうちは、コントローラ21は、一定時間のスリープをはさんで周期的に起動し、起動する毎に携帯装置10からの信号を受信したか否かを判断してもよい。ステップS52において、受信信号が遠隔操作信号であるか否かを判断し、YESのときはステップS53に進み、NOのときはステップS55に進む。ステップS53において、認証に成功したか否かを判断し、YESのときはステップS54に進み、NOのときはステップS51に戻る。ステップS54において、遠隔操作信号に従って車両を制御し、ステップS51に戻る。ステップS55において、受信信号が車両探索信号であるか否かを判断し、YESのときはステップS56に進み、NOのときはステップS51に戻る。ステップS56において、認証に成功したか否かを判断し、YESのときはステップS57に進み、NOのときはステップS51に戻る。ステップS57において、携帯装置10に探索応答信号を送信し、ステップS51に戻る。
【0038】
図13は、本発明の実施の形態3に係る例示的な携帯装置10の車両探索処理を示すフローチャートである。ステップS61において、指示信号が入力されたか否かを判断し、YESのときはステップS62に進み、NOのときはさらに待機する。ステップS62において、指示信号が遠隔操作指示であるか否かを判断し、YESのときはステップS63に進み、NOのときはステップS65に進む。ステップS63において、無指向性アンテナ18に切り換える。ステップS64において、無指向性アンテナ18を用いて車載装置20に遠隔操作信号を送信する。ステップS65において、指示信号が車両探索指示であるか否かを判断し、YESのときはステップS66に進み、NOのときはステップS61に戻る。ステップS66において、無指向性アンテナ18に切り換える。ステップS67において、無指向性アンテナ18を用いて車載装置20に車両探索信号を送信する。ステップS68において、車載装置20から探索応答信号を受信したか否かを判断し、YESのときはステップS71に進み、NOのときはステップS69に進む。ステップS69において、再送回数は最大値以下であるか否かを判断し、YESのときはステップS67に戻って車両探索信号を再送し、NOのときはステップS70に進む。ステップS70において、通信範囲外であることを通知する。ステップS71において、受信した車両応答信号の相関値を「無指向性アンテナを用いたときの相関値」としてメモリ13に記憶する。なお、実施の形態3では、携帯装置10の無線送受信回路15は、図4に示した車載装置20の無線送受信回路23と同様に、受信信号の相関値を取得できるように構成される。ステップS72において、指向性アンテナ17に切り換える。ステップS73において、車載装置20は、探索応答信号を引き続いて送信しているので、携帯装置10のコントローラ12は、受信した車両応答信号の相関値を「指向性アンテナを用いたときの相関値」としてメモリ13に記憶する。ステップS74において、無指向性アンテナ18に切り換える。ステップS75において、ステップS71で記憶した相関値とステップS73で記憶した相関値との差を所定のしきい値Aと比較し、相関値の差がしきい値Aを超えているか否かを判断する。上記の比較及び判断自体は、実施の形態1において車載装置20のコントローラ21が実行したものと同じである。ステップS76において、探索結果をユーザ通知装置14を介してユーザに通知して、ステップS61に戻る。
【0039】
実施の形態3の車両位置探索システムによれば、上記のように、携帯装置10のコントローラ12によって相関値の取得、相関値の差としきい値との比較、及び車両位置の判定を実行することで、判定結果を車載装置20から携帯装置10に送信する必要がなく、送信エラー等による探索結果の取得失敗を防止できる。
【0040】
また、実施の形態3の車両位置探索システムの構成と、実施の形態1及び2の車両位置探索システムに関連して説明した構成を組み合わせてもよい。例えば、図12のステップS57の実行後(又は他のタイミングで)に、図11の接近通知処理を実行してもよい。
【産業上の利用可能性】
【0041】
本発明によれば、車載機器遠隔制御システムを用いた車両位置探索システムであって、車載機器遠隔制御システムの本来の機能に制限を加えることなく、また、新たなセンサの追加を必要とすることもなく、車両の位置を探索してユーザに通知することができる車両位置探索システムを提供することができる。
【符号の説明】
【0042】
10 携帯装置、11 携帯装置10のユーザ入力装置、12 携帯装置10のコントローラ、13 携帯装置10のメモリ、14 携帯装置10のユーザ通知装置、15 携帯装置10の無線送受信回路、16 アンテナ切り換え回路、17 指向性アンテナ、18 携帯装置10の無指向性アンテナ、20 車載装置、21 車載装置20のコントローラ、22 車載装置20のメモリ、23 車載装置20の無線送受信回路、24 車載装置20の無指向性アンテナ、30 車載装置20のユーザ入力装置、31 ドア開閉検出センサ、32 センサ群、33 車載装置20のユーザ通知装置、34 イモビライザ装置、35 エンジン制御装置、36 ステアリングロック装置、37 ドアロック装置、38 シフトロック装置、150 携帯装置10のPN信号生成回路、151 携帯装置10のPN信号切り換え回路、152 携帯装置10の1次変調回路、153 携帯装置10の増幅器、154 携帯装置10の増幅器、155 携帯装置10の1次復調回路、156 携帯装置10の相関回路、157 携帯装置10のデータ復調回路、230 車載装置20のPN信号生成回路、231 車載装置20のPN信号切り換え回路、232 車載装置20の1次変調回路、233 車載装置20の増幅器、234 車載装置20の増幅器、235 車載装置20の1次復調回路、236 車載装置20の相関回路、
237 車載装置20のデータ復調回路、40 指向性アンテナ17のアンテナパターン、41 無指向性アンテナ18のアンテナパターン。
【特許請求の範囲】
【請求項1】
無線通信手段をそれぞれ備えた車載装置及び携帯装置を含む車両位置探索システムにおいて、
上記携帯装置の無線通信手段は、無指向性アンテナ及び指向性アンテナを備え、
上記携帯装置は、ユーザ入力情報を取得する入力手段及びユーザに通知する通知手段を備え、
上記携帯装置は、上記入力手段から指示信号が送られたとき、無指向性アンテナを用いて第1の車両探索信号を車載装置に送信し、指向性アンテナを用いて第2の車両探索信号を車載装置に送信し、
上記車載装置は、上記第1の車両探索信号の信号強度と、上記第2の車両探索信号の信号強度とを取得し、上記第1の車両探索信号の信号強度と上記第2の車両探索信号の信号強度との差が第1のしきい値より大きいか否かを判断し、判断結果を上記携帯装置に送信し、
上記携帯装置は、上記送信された判断結果を上記通知手段に出力することを特徴とする車両位置探索システム。
【請求項2】
上記各無線通信手段はスペクトル拡散信号を送受信し、上記車載装置は、上記第1の車両探索信号及び上記第2の車両探索信号の信号強度としてスペクトル拡散信号の相関値を用いることを特徴とする請求項1記載の車両位置探索システム。
【請求項3】
上記指向性アンテナは所定方向にヌルを有することを特徴とする請求項1又は2記載の車両位置探索システム。
【請求項4】
上記通知手段は、上記無指向性アンテナ及び上記指向性アンテナのいずれが選択されているかを通知することを特徴とする請求項1〜3のいずれか1つに記載の車両位置探索システム。
【請求項5】
上記指向性アンテナは可変指向性アンテナであることを特徴とする請求項1〜4のいずれか1つに記載の車両位置探索システム。
【請求項6】
上記車載装置は通知手段をさらに備え、上記携帯装置に送信した追跡信号に応答して受信された追跡応答信号の信号強度が第2のしきい値より大きいとき、上記通知手段を動作させることを特徴とする請求項1〜5のいずれか1つに記載の車両位置探索システム。
【請求項7】
無線通信手段をそれぞれ備えた車載装置及び携帯装置を含む車両位置探索システムにおいて、
上記携帯装置の無線通信手段は、無指向性アンテナ及び指向性アンテナを備え、
上記携帯装置は、ユーザ入力情報を取得する入力手段及びユーザに通知する通知手段を備え、
上記携帯装置は、上記入力手段から指示信号が送られたとき、車両探索信号を上記車載装置に送信し、
上記車載装置は、上記車両探索信号に応答して、第1の探索応答信号及び第2の探索応答信号を送信し、
上記携帯装置は、無指向性アンテナを用いて第1の探索応答信号を受信し、指向性アンテナを用いて第2の探索応答信号を受信送信し、上記第1の探索応答信号の信号強度と、上記第2の探索応答信号の信号強度とを取得し、上記第1の探索応答信号の信号強度と上記第2の探索応答信号の信号強度との差が予め決められたしきい値より大きいか否かを判断し、判断結果を上記通知手段に出力することを特徴とする車両位置探索システム。
【請求項8】
上記各無線通信手段はスペクトル拡散信号を送受信し、上記携帯装置は、上記第1の探索応答信号及び上記第2の探索応答信号の信号強度としてスペクトル拡散信号の相関値を用いることを特徴とする請求項7記載の車両位置探索システム。
【請求項9】
上記指向性アンテナは所定方向にヌルを有することを特徴とする請求項7又は8記載の車両位置探索システム。
【請求項10】
上記通知手段は、上記無指向性アンテナ及び上記指向性アンテナのいずれが選択されているかを通知することを特徴とする請求項7〜9のいずれか1つに記載の車両位置探索システム。
【請求項11】
上記指向性アンテナは可変指向性アンテナであることを特徴とする請求項7〜10のいずれか1つに記載の車両位置探索システム。
【請求項12】
上記車載装置は通知手段をさらに備え、上記携帯装置に送信した追跡信号に応答して受信された追跡応答信号の信号強度が第2のしきい値より大きいとき、上記通知手段を動作させることを特徴とする請求項1〜5のいずれか1つに記載の車両位置探索システム。
【請求項1】
無線通信手段をそれぞれ備えた車載装置及び携帯装置を含む車両位置探索システムにおいて、
上記携帯装置の無線通信手段は、無指向性アンテナ及び指向性アンテナを備え、
上記携帯装置は、ユーザ入力情報を取得する入力手段及びユーザに通知する通知手段を備え、
上記携帯装置は、上記入力手段から指示信号が送られたとき、無指向性アンテナを用いて第1の車両探索信号を車載装置に送信し、指向性アンテナを用いて第2の車両探索信号を車載装置に送信し、
上記車載装置は、上記第1の車両探索信号の信号強度と、上記第2の車両探索信号の信号強度とを取得し、上記第1の車両探索信号の信号強度と上記第2の車両探索信号の信号強度との差が第1のしきい値より大きいか否かを判断し、判断結果を上記携帯装置に送信し、
上記携帯装置は、上記送信された判断結果を上記通知手段に出力することを特徴とする車両位置探索システム。
【請求項2】
上記各無線通信手段はスペクトル拡散信号を送受信し、上記車載装置は、上記第1の車両探索信号及び上記第2の車両探索信号の信号強度としてスペクトル拡散信号の相関値を用いることを特徴とする請求項1記載の車両位置探索システム。
【請求項3】
上記指向性アンテナは所定方向にヌルを有することを特徴とする請求項1又は2記載の車両位置探索システム。
【請求項4】
上記通知手段は、上記無指向性アンテナ及び上記指向性アンテナのいずれが選択されているかを通知することを特徴とする請求項1〜3のいずれか1つに記載の車両位置探索システム。
【請求項5】
上記指向性アンテナは可変指向性アンテナであることを特徴とする請求項1〜4のいずれか1つに記載の車両位置探索システム。
【請求項6】
上記車載装置は通知手段をさらに備え、上記携帯装置に送信した追跡信号に応答して受信された追跡応答信号の信号強度が第2のしきい値より大きいとき、上記通知手段を動作させることを特徴とする請求項1〜5のいずれか1つに記載の車両位置探索システム。
【請求項7】
無線通信手段をそれぞれ備えた車載装置及び携帯装置を含む車両位置探索システムにおいて、
上記携帯装置の無線通信手段は、無指向性アンテナ及び指向性アンテナを備え、
上記携帯装置は、ユーザ入力情報を取得する入力手段及びユーザに通知する通知手段を備え、
上記携帯装置は、上記入力手段から指示信号が送られたとき、車両探索信号を上記車載装置に送信し、
上記車載装置は、上記車両探索信号に応答して、第1の探索応答信号及び第2の探索応答信号を送信し、
上記携帯装置は、無指向性アンテナを用いて第1の探索応答信号を受信し、指向性アンテナを用いて第2の探索応答信号を受信送信し、上記第1の探索応答信号の信号強度と、上記第2の探索応答信号の信号強度とを取得し、上記第1の探索応答信号の信号強度と上記第2の探索応答信号の信号強度との差が予め決められたしきい値より大きいか否かを判断し、判断結果を上記通知手段に出力することを特徴とする車両位置探索システム。
【請求項8】
上記各無線通信手段はスペクトル拡散信号を送受信し、上記携帯装置は、上記第1の探索応答信号及び上記第2の探索応答信号の信号強度としてスペクトル拡散信号の相関値を用いることを特徴とする請求項7記載の車両位置探索システム。
【請求項9】
上記指向性アンテナは所定方向にヌルを有することを特徴とする請求項7又は8記載の車両位置探索システム。
【請求項10】
上記通知手段は、上記無指向性アンテナ及び上記指向性アンテナのいずれが選択されているかを通知することを特徴とする請求項7〜9のいずれか1つに記載の車両位置探索システム。
【請求項11】
上記指向性アンテナは可変指向性アンテナであることを特徴とする請求項7〜10のいずれか1つに記載の車両位置探索システム。
【請求項12】
上記車載装置は通知手段をさらに備え、上記携帯装置に送信した追跡信号に応答して受信された追跡応答信号の信号強度が第2のしきい値より大きいとき、上記通知手段を動作させることを特徴とする請求項1〜5のいずれか1つに記載の車両位置探索システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2011−196690(P2011−196690A)
【公開日】平成23年10月6日(2011.10.6)
【国際特許分類】
【出願番号】特願2010−60457(P2010−60457)
【出願日】平成22年3月17日(2010.3.17)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成23年10月6日(2011.10.6)
【国際特許分類】
【出願日】平成22年3月17日(2010.3.17)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]