
車両位置推定システム
【課題】GPS信号が受信できない環境下においても確実な位置検出を安価に実現できる技術を提供する。
【解決手段】車両位置推定システムは、位置情報が埋め込まれた画像マーカーと、GPS信号を受信して自車両を特定する車両とから構成される車両は、カメラと、画像認識手段と、位置推定手段を備える。画像認識手段は、カメラによって撮影された画像を解析し、画像マーカーの検出およびデコードを行って、画像マーカーに埋め込まれた位置情報を取得する。位置推定手段は、通常はGPS信号に基づいて位置推定を行うが、GPS信号を受信できない場合には、画像認識手段によって取得された画像マーカーの位置情報に基づいて自車両の位置を推定する。
【解決手段】車両位置推定システムは、位置情報が埋め込まれた画像マーカーと、GPS信号を受信して自車両を特定する車両とから構成される車両は、カメラと、画像認識手段と、位置推定手段を備える。画像認識手段は、カメラによって撮影された画像を解析し、画像マーカーの検出およびデコードを行って、画像マーカーに埋め込まれた位置情報を取得する。位置推定手段は、通常はGPS信号に基づいて位置推定を行うが、GPS信号を受信できない場合には、画像認識手段によって取得された画像マーカーの位置情報に基づいて自車両の位置を推定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の位置を推定する技術に関する。
【背景技術】
【0002】
従来のカーナビゲーション装置では、自車両の位置を推定する手段として、GPSを主に用い、ジャイロや加速度センサーなどを補助手段として用いている。このようなカーナビゲーション装置では、GPS信号が受信できない場合であっても、補助手段によって概ね正しい位置推定が行える。ただし、GPS信号が長い間受信できない場合に位置推定が狂いやすい。そのような状況が発生する場所として、都市部における地下駐車場やビル内部などを挙げることができる。入口と出口が同一の場合には弊害が少ないが、大規模駐車場などで入口と出口がそれぞれ離れた場所に複数存在すると、位置推定の誤差が大きくなり、どの出口から出たのかが判別できなくなる。GPS信号を再取得するまで位置情報が狂ったままになることが少なくない。
【0003】
特許文献1は、地下駐車場から出る際に、出口を出てからどちらの方向へ進行すればよいかをユーザに提示するために、出口付近の風景画像に進行方向の矢印を重ねて表示している。しかし、出口が複数あることは考慮されていない。
【0004】
特許文献2では、ビル内部や地下駐車場などで正確な車両位置を検出するために、携帯電話基地局やPHS基地局からの電界強度を利用している。しかしながら、地下駐車場等では携帯電話の電波を受信できないエリアが少なくない。また、地下駐車場内部に電波や光ビーコンを使った位置推定手段(たとえば、DSRC)を設置することも考えられるが、設置にコストがかかってしまう。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2006−84208号公報
【特許文献2】特開平10−260241号公報
【特許文献3】特開2004−303020号公報
【特許文献4】特開2003−156360号公報
【特許文献5】特開2005−241265号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明は上記の問題点を考慮してなされたものであり、その目的は、GPS信号が受信できない環境下において、確実な位置検出を安価に実現することにある。
【課題を解決するための手段】
【0007】
上記目的を達成するために本発明では、GPS信号を受信できない時の位置推定を、以下の手段または処理によって行う。
【0008】
本発明に係る車両位置推定システムは、位置情報が埋め込まれた画像マーカーと、GPS信号を受信して自車両の位置を特定する車両とから構成される。画像マーカーとは、文字や数字などの情報を画像としてコード化したものである。画像マーカーの例として、1次元コード(バーコードとも呼ばれる)や、2次元コード(2次元バーコードとも呼ばれる)を挙げることができるが、これらに限られるものではない。また、1次元コードや2次元コードとして種々の規格や手法があるが、本発明は特定手法のコードに限定されるも
のではない。また、位置情報とは位置を特定可能な情報であり、少なくとも緯度および経度情報を絶対座標系で表した情報(以下、絶対位置座標という)、絶対位置座標と関連付けられた識別子(ID)などを含む。
【0009】
車両は、カメラと画像認識手段を有する。画像認識手段は、カメラによって撮影された画像を解析して、画像マーカーの検出およびデコードを行って、画像マーカーに埋め込まれた位置情報を取得する。車両は、GPS信号を受信可能な場合にはGPS信号に基づいて位置推定を行うが、GPS信号を受信できない場合には、画像認識手段によって取得された画像マーカーに基づいて、自車両の位置を推定する。
【0010】
画像マーカーに埋め込まれている位置情報が、この画像マーカーが設置される位置の絶対位置座標である場合には、位置推定手段は、画像認識手段によって画像マーカーから取得された絶対位置座標が自車両の現在位置であると推定する。
【0011】
一方、画像マーカーに埋め込まれている位置情報が、この画像マーカーが設置される位置を識別するための識別子である場合には、車両は、識別子と絶対位置座標とを対応付けて記憶する記憶する手段を持つ必要がある。位置推定手段は、画像認識手段によって画像マーカーから取得された識別子に対応する絶対位置座標を記憶手段から取得して、取得された位置を自車両の現在位置であると推定する。
【0012】
このような構成によれば、車両がGPS信号を受信できないような場所であっても、車両の位置を正確に検出することができる。画像マーカーは、適切な大きさで紙等に印刷したり壁等に直接描いておいたりして、車載カメラで撮影可能な位置に提示しておけばよいので、設置が非常に簡単でコストもかからない。電波や光ビーコンを使っても位置推定は行えるが、設置に非常にコストがかかる。画像マーカーでは、電源供給も不要であるため、設置のコストだけでなく、維持コストもほとんど不要である。
【0013】
なお、本発明は、上記手段の少なくとも一部を有する車両位置推定システムあるいは車両として捉えることができる。また、本発明は、上記処理の少なくとも一部を含む車両位置推定方法、または、このような方法を実現するためのプログラムとして捉えることもできる。上記手段および処理の各々は可能な限り互いに組み合わせて本発明を構成することができる。
【発明の効果】
【0014】
本発明によれば、GPS信号が受信できない環境下においても、確実な位置検出を安価に実現可能である。
【図面の簡単な説明】
【0015】
【図1】車両位置推定システムを構成する車両の機能ブロックを示す図。
【図2】地下駐車場の出入り口とそこに設置される画像マーカーを説明する図。
【図3】GPS信号をロストしたときに行われる位置推定処理のフローチャート。
【発明を実施するための形態】
【0016】
以下に図面を参照して、この発明の好適な実施の形態を例示的に詳しく説明する。
【0017】
(第1の実施形態)
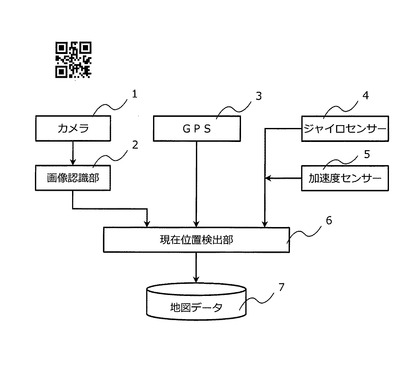
本実施形態に係る車両位置推定システムの構成を説明する。図1は、本システムを構成する車両の機能ブロックを示す。図に示すように、車両は、カメラ1、画像認識部2、GPS受信装置3、ジャイロセンサー4、加速度センサー5、現在位置検出部6、地図データ7を備える。カメラ1は、車両の進行方向前方を撮影可能である。車両が、先行車検知
機能、歩行者検出機能やドライブレコーダーなどのために前方を撮影するカメラを有している場合は、複数の機能のためにカメラが兼用されても良い。画像認識部2は、カメラ1から取得された画像の中から画像マーカーを検出する機能、および検出された画像マーカーをデコードして埋め込まれている情報を取り出す機能を有する。GPS受信装置3はGPS衛星からGPS信号を受信し緯度・経度情報を含むGPS情報を取得する。ジャイロセンサー4は、車両の移動方向などを検出するものである。加速度センサー5は、車両の加速度を検出する。現在位置検出部6は、車両の現在位置を検出する。GPS信号が受信できる場合は、GPS情報に含まれる位置情報を車両の現在位置であると判断する(GPS航法)。一方、GPS信号が受信できない場合は、ジャイロセンサー4および加速度センサー5から割り出される移動方向および移動距離に基づく補正処理(慣性航法)と、画像マーカーを利用した補正処理によって、車両の現在位置を推定する。
【0018】
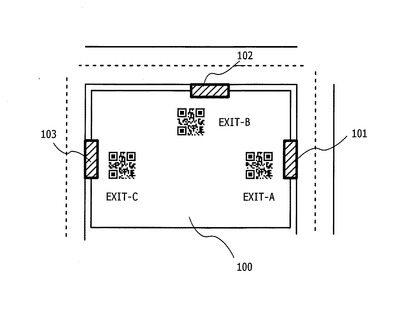
次に、地下駐車場などのGPS信号が届かない施設について説明する。図2は、地下駐車場の施設を説明する図である。地下駐車場100には、複数の出入り口101,102,103がある。図では地下駐車場100が1ブロックに収まり出入り口が3つしかない例を示しているが、大規模な地下駐車場は、複数のブロックにまたがり、それぞれが異なる道路に通じる多数の出入り口を有する場合がある。このように大規模な地下駐車場では、位置推定に誤差が蓄積されると、車両が駐車場から出る際に実際とは違う出口から出たと判断されてしまう場合がある。このような問題に対応するために、各出口の近くには画像マーカーが設けられている。画像マーカーとしては、2次元コード(たとえば、JIS
X 0510(2004)規格準拠)を採用できる。画像マーカーには、その出入り口(画像マーカーの設置位置)の絶対位置座標が情報として埋め込まれる。
【0019】
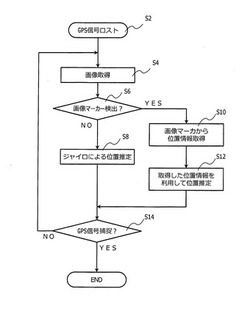
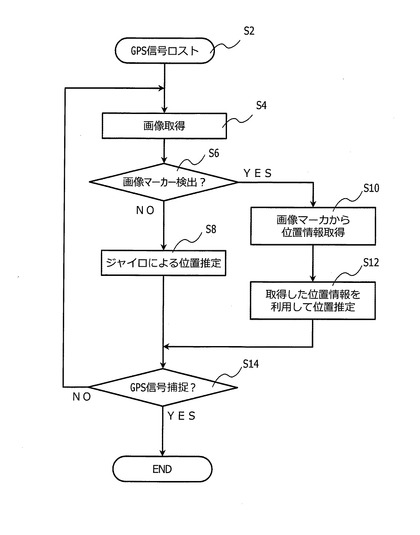
車両がこのような地下駐車場に入ってGPS信号を受信できなくなった時の処理について、図3のフローチャートを参照しながら説明する。車両がGPS信号を受信できなくなる(ステップS2)と、以下の処理が開始される。まず、カメラ1が動作を開始して、取得された画像が画像認識部2に供給される(ステップS4)。なお、先行車検出などの目的でカメラによる画像撮影が既に行われている場合には、取得された画像が画像認識部2に供給されるようにするだけでよい。そして、画像認識部2が、画像の中から画像マーカーの検出処理を行う(ステップS6)。撮影画像から画像マーカーが検出できない場合(ステップS6−NO)、現在位置検出部6は、ジャイロセンサー4や加速度センサー5を用いた慣性航法による位置推定処理を行う(ステップS8)。一方、撮影画像から画像マーカーが検出された場合(ステップS6−YES)は、画像マーカーに埋め込まれている情報をデコードして、位置情報(絶対位置座標)を取得する(ステップS10)。現在位置検出部6は、画像マーカーから取得された絶対位置座標を現在位置であると判断する(ステップS12)。このような画像マーカーを利用した現在位置推定処理(画像マーカーが利用できない場合はジャイロ等による補完処理)を、GPS信号が再び捕捉できるようになるまで(ステップS14−YES)繰り返す。
【0020】
本実施形態によれば、大規模な地下駐車場のような建物内部でも、正しい位置を取得することができる。位置推定に誤差が生じた場合に建物から出てGPS信号を再度受信可能となる前であっても、画像マーカーを検出することで自車両の正しい位置を特定することができる。2次元コードは、エラー耐性が強いため誤検知によって誤った位置座標を現在位置であると判断する危険性が少ない。仮に画像マーカーを検出できなかった場合でも、ジャイロ等を用いた補完処理による位置推定は行えるので、従来と同様の精度で位置推定が実行でき悪影響はない。また、画像マーカーは紙などに印刷して壁に貼り付けておくだけで導入できるため設置にコストを要せず、地下駐車場などの設備運営者にとって導入が容易である。また、車両側にもドライブレコーダーや先行車および歩行者検知のために前方カメラが導入されるケースが増えているため、導入の障壁は低い。
【0021】
なお、以上の説明においては、画像マーカーの設置場所として、駐車場等の建物の出口付近を想定した。これは、誘導路が一直線であり、照明も安定していることが多く、カメラの画角や照明による検出エラーを有効に回避できるためである。ただし、画像マーカーの設置場所は建物の出口付近には限定されず、それ以上に細かい単位で設置しても良い。たとえば、複数階にまたがる駐車場では、1フロア、あるいは、1区画単位で画像マーカーを設定し、より細かい精度で車両位置を検出可能としても良い。
【0022】
また、画像マーカーには位置情報だけでなく、車両の進行方向に関する情報を含めることも好ましい。進行方向に関する情報を含める画像マーカーは、その画像マーカーを撮影する車両の進行方向が特定の方向に限定されるように、駐車場の出口など誘導路が一直線となる場所に設置されるものであることが好ましい。このように画像マーカーに進行方向に関する情報も含まれていれば、車両の現在位置だけでなく、その進行方向についても正しい情報を得ることができる。
【0023】
(第2の実施形態)
上記の実施形態では、画像マーカーに位置の絶対位置座標(緯度・経度)を埋め込んだが、本実施形態では、画像マーカーに出入り口を特定する識別子(ID)を埋め込む。この場合、画像マーカー自体には絶対位置座標の情報が含まれないので、車両が有する地図データ7に識別子と絶対位置座標を関連付けて記憶する。ここでは、地図データに含まれる建物の属性データを拡張して、建物の属性データとして出入り口データを含ませる。出入り口のデータには、出入り口固有の識別子と、その絶対位置(絶対位置座標)が含まれる。
【0024】
車両が建物に内部に入ってGPS信号を受信できなくなる場合は、急にGPS信号が途切れるのではなく徐々に受信信号強度が弱くなる。したがって、マップマッチングにより自車両がどの建物に入ったかを検出可能である。そして、建物の内部で画像マーカーを検出して埋め込まれている識別子を取得したときは、地図データ7を参照して、同じ識別子を有する出入り口データを、建物データの属性データの中から探す。これにより、画像マーカーを撮影した車両は、自車両の位置を特定可能である。
【符号の説明】
【0025】
1 カメラ
2 画像認識部
4 GPS
6 現在位置検出部
【技術分野】
【0001】
本発明は、車両の位置を推定する技術に関する。
【背景技術】
【0002】
従来のカーナビゲーション装置では、自車両の位置を推定する手段として、GPSを主に用い、ジャイロや加速度センサーなどを補助手段として用いている。このようなカーナビゲーション装置では、GPS信号が受信できない場合であっても、補助手段によって概ね正しい位置推定が行える。ただし、GPS信号が長い間受信できない場合に位置推定が狂いやすい。そのような状況が発生する場所として、都市部における地下駐車場やビル内部などを挙げることができる。入口と出口が同一の場合には弊害が少ないが、大規模駐車場などで入口と出口がそれぞれ離れた場所に複数存在すると、位置推定の誤差が大きくなり、どの出口から出たのかが判別できなくなる。GPS信号を再取得するまで位置情報が狂ったままになることが少なくない。
【0003】
特許文献1は、地下駐車場から出る際に、出口を出てからどちらの方向へ進行すればよいかをユーザに提示するために、出口付近の風景画像に進行方向の矢印を重ねて表示している。しかし、出口が複数あることは考慮されていない。
【0004】
特許文献2では、ビル内部や地下駐車場などで正確な車両位置を検出するために、携帯電話基地局やPHS基地局からの電界強度を利用している。しかしながら、地下駐車場等では携帯電話の電波を受信できないエリアが少なくない。また、地下駐車場内部に電波や光ビーコンを使った位置推定手段(たとえば、DSRC)を設置することも考えられるが、設置にコストがかかってしまう。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2006−84208号公報
【特許文献2】特開平10−260241号公報
【特許文献3】特開2004−303020号公報
【特許文献4】特開2003−156360号公報
【特許文献5】特開2005−241265号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明は上記の問題点を考慮してなされたものであり、その目的は、GPS信号が受信できない環境下において、確実な位置検出を安価に実現することにある。
【課題を解決するための手段】
【0007】
上記目的を達成するために本発明では、GPS信号を受信できない時の位置推定を、以下の手段または処理によって行う。
【0008】
本発明に係る車両位置推定システムは、位置情報が埋め込まれた画像マーカーと、GPS信号を受信して自車両の位置を特定する車両とから構成される。画像マーカーとは、文字や数字などの情報を画像としてコード化したものである。画像マーカーの例として、1次元コード(バーコードとも呼ばれる)や、2次元コード(2次元バーコードとも呼ばれる)を挙げることができるが、これらに限られるものではない。また、1次元コードや2次元コードとして種々の規格や手法があるが、本発明は特定手法のコードに限定されるも
のではない。また、位置情報とは位置を特定可能な情報であり、少なくとも緯度および経度情報を絶対座標系で表した情報(以下、絶対位置座標という)、絶対位置座標と関連付けられた識別子(ID)などを含む。
【0009】
車両は、カメラと画像認識手段を有する。画像認識手段は、カメラによって撮影された画像を解析して、画像マーカーの検出およびデコードを行って、画像マーカーに埋め込まれた位置情報を取得する。車両は、GPS信号を受信可能な場合にはGPS信号に基づいて位置推定を行うが、GPS信号を受信できない場合には、画像認識手段によって取得された画像マーカーに基づいて、自車両の位置を推定する。
【0010】
画像マーカーに埋め込まれている位置情報が、この画像マーカーが設置される位置の絶対位置座標である場合には、位置推定手段は、画像認識手段によって画像マーカーから取得された絶対位置座標が自車両の現在位置であると推定する。
【0011】
一方、画像マーカーに埋め込まれている位置情報が、この画像マーカーが設置される位置を識別するための識別子である場合には、車両は、識別子と絶対位置座標とを対応付けて記憶する記憶する手段を持つ必要がある。位置推定手段は、画像認識手段によって画像マーカーから取得された識別子に対応する絶対位置座標を記憶手段から取得して、取得された位置を自車両の現在位置であると推定する。
【0012】
このような構成によれば、車両がGPS信号を受信できないような場所であっても、車両の位置を正確に検出することができる。画像マーカーは、適切な大きさで紙等に印刷したり壁等に直接描いておいたりして、車載カメラで撮影可能な位置に提示しておけばよいので、設置が非常に簡単でコストもかからない。電波や光ビーコンを使っても位置推定は行えるが、設置に非常にコストがかかる。画像マーカーでは、電源供給も不要であるため、設置のコストだけでなく、維持コストもほとんど不要である。
【0013】
なお、本発明は、上記手段の少なくとも一部を有する車両位置推定システムあるいは車両として捉えることができる。また、本発明は、上記処理の少なくとも一部を含む車両位置推定方法、または、このような方法を実現するためのプログラムとして捉えることもできる。上記手段および処理の各々は可能な限り互いに組み合わせて本発明を構成することができる。
【発明の効果】
【0014】
本発明によれば、GPS信号が受信できない環境下においても、確実な位置検出を安価に実現可能である。
【図面の簡単な説明】
【0015】
【図1】車両位置推定システムを構成する車両の機能ブロックを示す図。
【図2】地下駐車場の出入り口とそこに設置される画像マーカーを説明する図。
【図3】GPS信号をロストしたときに行われる位置推定処理のフローチャート。
【発明を実施するための形態】
【0016】
以下に図面を参照して、この発明の好適な実施の形態を例示的に詳しく説明する。
【0017】
(第1の実施形態)
本実施形態に係る車両位置推定システムの構成を説明する。図1は、本システムを構成する車両の機能ブロックを示す。図に示すように、車両は、カメラ1、画像認識部2、GPS受信装置3、ジャイロセンサー4、加速度センサー5、現在位置検出部6、地図データ7を備える。カメラ1は、車両の進行方向前方を撮影可能である。車両が、先行車検知
機能、歩行者検出機能やドライブレコーダーなどのために前方を撮影するカメラを有している場合は、複数の機能のためにカメラが兼用されても良い。画像認識部2は、カメラ1から取得された画像の中から画像マーカーを検出する機能、および検出された画像マーカーをデコードして埋め込まれている情報を取り出す機能を有する。GPS受信装置3はGPS衛星からGPS信号を受信し緯度・経度情報を含むGPS情報を取得する。ジャイロセンサー4は、車両の移動方向などを検出するものである。加速度センサー5は、車両の加速度を検出する。現在位置検出部6は、車両の現在位置を検出する。GPS信号が受信できる場合は、GPS情報に含まれる位置情報を車両の現在位置であると判断する(GPS航法)。一方、GPS信号が受信できない場合は、ジャイロセンサー4および加速度センサー5から割り出される移動方向および移動距離に基づく補正処理(慣性航法)と、画像マーカーを利用した補正処理によって、車両の現在位置を推定する。
【0018】
次に、地下駐車場などのGPS信号が届かない施設について説明する。図2は、地下駐車場の施設を説明する図である。地下駐車場100には、複数の出入り口101,102,103がある。図では地下駐車場100が1ブロックに収まり出入り口が3つしかない例を示しているが、大規模な地下駐車場は、複数のブロックにまたがり、それぞれが異なる道路に通じる多数の出入り口を有する場合がある。このように大規模な地下駐車場では、位置推定に誤差が蓄積されると、車両が駐車場から出る際に実際とは違う出口から出たと判断されてしまう場合がある。このような問題に対応するために、各出口の近くには画像マーカーが設けられている。画像マーカーとしては、2次元コード(たとえば、JIS
X 0510(2004)規格準拠)を採用できる。画像マーカーには、その出入り口(画像マーカーの設置位置)の絶対位置座標が情報として埋め込まれる。
【0019】
車両がこのような地下駐車場に入ってGPS信号を受信できなくなった時の処理について、図3のフローチャートを参照しながら説明する。車両がGPS信号を受信できなくなる(ステップS2)と、以下の処理が開始される。まず、カメラ1が動作を開始して、取得された画像が画像認識部2に供給される(ステップS4)。なお、先行車検出などの目的でカメラによる画像撮影が既に行われている場合には、取得された画像が画像認識部2に供給されるようにするだけでよい。そして、画像認識部2が、画像の中から画像マーカーの検出処理を行う(ステップS6)。撮影画像から画像マーカーが検出できない場合(ステップS6−NO)、現在位置検出部6は、ジャイロセンサー4や加速度センサー5を用いた慣性航法による位置推定処理を行う(ステップS8)。一方、撮影画像から画像マーカーが検出された場合(ステップS6−YES)は、画像マーカーに埋め込まれている情報をデコードして、位置情報(絶対位置座標)を取得する(ステップS10)。現在位置検出部6は、画像マーカーから取得された絶対位置座標を現在位置であると判断する(ステップS12)。このような画像マーカーを利用した現在位置推定処理(画像マーカーが利用できない場合はジャイロ等による補完処理)を、GPS信号が再び捕捉できるようになるまで(ステップS14−YES)繰り返す。
【0020】
本実施形態によれば、大規模な地下駐車場のような建物内部でも、正しい位置を取得することができる。位置推定に誤差が生じた場合に建物から出てGPS信号を再度受信可能となる前であっても、画像マーカーを検出することで自車両の正しい位置を特定することができる。2次元コードは、エラー耐性が強いため誤検知によって誤った位置座標を現在位置であると判断する危険性が少ない。仮に画像マーカーを検出できなかった場合でも、ジャイロ等を用いた補完処理による位置推定は行えるので、従来と同様の精度で位置推定が実行でき悪影響はない。また、画像マーカーは紙などに印刷して壁に貼り付けておくだけで導入できるため設置にコストを要せず、地下駐車場などの設備運営者にとって導入が容易である。また、車両側にもドライブレコーダーや先行車および歩行者検知のために前方カメラが導入されるケースが増えているため、導入の障壁は低い。
【0021】
なお、以上の説明においては、画像マーカーの設置場所として、駐車場等の建物の出口付近を想定した。これは、誘導路が一直線であり、照明も安定していることが多く、カメラの画角や照明による検出エラーを有効に回避できるためである。ただし、画像マーカーの設置場所は建物の出口付近には限定されず、それ以上に細かい単位で設置しても良い。たとえば、複数階にまたがる駐車場では、1フロア、あるいは、1区画単位で画像マーカーを設定し、より細かい精度で車両位置を検出可能としても良い。
【0022】
また、画像マーカーには位置情報だけでなく、車両の進行方向に関する情報を含めることも好ましい。進行方向に関する情報を含める画像マーカーは、その画像マーカーを撮影する車両の進行方向が特定の方向に限定されるように、駐車場の出口など誘導路が一直線となる場所に設置されるものであることが好ましい。このように画像マーカーに進行方向に関する情報も含まれていれば、車両の現在位置だけでなく、その進行方向についても正しい情報を得ることができる。
【0023】
(第2の実施形態)
上記の実施形態では、画像マーカーに位置の絶対位置座標(緯度・経度)を埋め込んだが、本実施形態では、画像マーカーに出入り口を特定する識別子(ID)を埋め込む。この場合、画像マーカー自体には絶対位置座標の情報が含まれないので、車両が有する地図データ7に識別子と絶対位置座標を関連付けて記憶する。ここでは、地図データに含まれる建物の属性データを拡張して、建物の属性データとして出入り口データを含ませる。出入り口のデータには、出入り口固有の識別子と、その絶対位置(絶対位置座標)が含まれる。
【0024】
車両が建物に内部に入ってGPS信号を受信できなくなる場合は、急にGPS信号が途切れるのではなく徐々に受信信号強度が弱くなる。したがって、マップマッチングにより自車両がどの建物に入ったかを検出可能である。そして、建物の内部で画像マーカーを検出して埋め込まれている識別子を取得したときは、地図データ7を参照して、同じ識別子を有する出入り口データを、建物データの属性データの中から探す。これにより、画像マーカーを撮影した車両は、自車両の位置を特定可能である。
【符号の説明】
【0025】
1 カメラ
2 画像認識部
4 GPS
6 現在位置検出部
【特許請求の範囲】
【請求項1】
位置情報が埋め込まれた画像マーカーと、GPS信号を受信して自車両の位置を特定する車両と、から構成される車両位置推定システムであって、
前記車両は、
カメラと、
前記カメラによって撮影された画像を解析し、画像マーカーの検出およびデコードを行って、画像マーカーに埋め込まれた位置情報を取得する画像認識手段と、
GPS信号を受信できない場合に、前記画像認識手段によって取得された画像マーカーの位置情報に基づいて、自車両の位置を推定する位置推定手段と、
を有することを特徴とする車両位置推定システム。
【請求項2】
前記画像マーカーは2次元コードであることを特徴とする請求項1に記載の車両位置推定システム。
【請求項3】
前記画像マーカーに埋め込まれた位置情報は、当該画像マーカーが設置される位置の絶対位置座標であることを特徴とする請求項1または2に記載の車両位置推定システム。
【請求項4】
前記画像マーカーに埋め込まれた位置情報は、当該画像マーカーが設置される位置を識別するための識別子であり、
前記位置推定手段は、前記識別子と絶対位置座標とを対応付けて記憶した記憶手段に基づいて、自車両の位置を推定する
ことを特徴とする請求項1または2に記載の車両位置推定システム。
【請求項1】
位置情報が埋め込まれた画像マーカーと、GPS信号を受信して自車両の位置を特定する車両と、から構成される車両位置推定システムであって、
前記車両は、
カメラと、
前記カメラによって撮影された画像を解析し、画像マーカーの検出およびデコードを行って、画像マーカーに埋め込まれた位置情報を取得する画像認識手段と、
GPS信号を受信できない場合に、前記画像認識手段によって取得された画像マーカーの位置情報に基づいて、自車両の位置を推定する位置推定手段と、
を有することを特徴とする車両位置推定システム。
【請求項2】
前記画像マーカーは2次元コードであることを特徴とする請求項1に記載の車両位置推定システム。
【請求項3】
前記画像マーカーに埋め込まれた位置情報は、当該画像マーカーが設置される位置の絶対位置座標であることを特徴とする請求項1または2に記載の車両位置推定システム。
【請求項4】
前記画像マーカーに埋め込まれた位置情報は、当該画像マーカーが設置される位置を識別するための識別子であり、
前記位置推定手段は、前記識別子と絶対位置座標とを対応付けて記憶した記憶手段に基づいて、自車両の位置を推定する
ことを特徴とする請求項1または2に記載の車両位置推定システム。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2011−13075(P2011−13075A)
【公開日】平成23年1月20日(2011.1.20)
【国際特許分類】
【出願番号】特願2009−156917(P2009−156917)
【出願日】平成21年7月1日(2009.7.1)
【出願人】(502087460)株式会社トヨタIT開発センター (232)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成23年1月20日(2011.1.20)
【国際特許分類】
【出願日】平成21年7月1日(2009.7.1)
【出願人】(502087460)株式会社トヨタIT開発センター (232)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]