
車両位置推定装置、車両用走行支援装置及び車両位置推定方法
【課題】 天候等の走行環境の影響を受けることなく、車線位置検出を的確に行う。
【解決手段】 自車両と同一方向の車線上に存在し且つ自車両から所定距離以内に存在する周囲車両を位置検出用車両とし(ステップS42)、この位置検出用車両及び自車両の位置情報から、前記周囲車両の自車両に対する相対位置関係を算出し、この相対位置関係と自車両と同一方向の車線の車線数とに基づいて、自車両が各車線位置に存在する信頼度を算出する(ステップS43)。同様の手順で他の周囲車両と自車両との相対位置関係に基づいて自車両が各車線位置に存在する信頼度を算出し、複数の周囲車両に基づいて推測した自車両が各車線位置に存在する信頼度の総和を算出し、この総和が最大となる位置に、自車両が位置する可能性が高いと推測する(ステップS46)。
【解決手段】 自車両と同一方向の車線上に存在し且つ自車両から所定距離以内に存在する周囲車両を位置検出用車両とし(ステップS42)、この位置検出用車両及び自車両の位置情報から、前記周囲車両の自車両に対する相対位置関係を算出し、この相対位置関係と自車両と同一方向の車線の車線数とに基づいて、自車両が各車線位置に存在する信頼度を算出する(ステップS43)。同様の手順で他の周囲車両と自車両との相対位置関係に基づいて自車両が各車線位置に存在する信頼度を算出し、複数の周囲車両に基づいて推測した自車両が各車線位置に存在する信頼度の総和を算出し、この総和が最大となる位置に、自車両が位置する可能性が高いと推測する(ステップS46)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、一の車両の、道路上における道路幅方向の位置を、他の車両との相対位置関係から推定するようにした、車両位置推定装置、車両用走行支援装置及び車両位置推定方法に関する。
【背景技術】
【0002】
従来、自車両の現在位置を検出する方法として、GPSにより車両の三次元的な現在位置の検出と、車速及び進行方向等の情報を組み合わせる自律航法とを併用する方法や、さらに、自車両の現在位置周辺の道路地図データの道路形状と実際に車両が走行した経路の形状とを比較して、形状が一致する度合が高い道路を走行していると判断するマップマッチングの手法等が提案されている。
【0003】
また、このような、GPSを用いた位置検出方法や、マップマッチングにより走行中の道路を判断する方法においては、その位置検出精度は、車両が、第何車線を走行しているかを識別するほど精度が高くないことから、例えば、カメラで撮像した前方画像を解析することによって、自車両が第何車線を走行しているかを判断するようにした方法等も提案されている(例えば、特許文献1参照)。
【特許文献1】特開平10−300494号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、上述のように、自車両の前方画像を解析することで車線位置を推定するようにした場合、広角なカメラを使った広い範囲の前方画像を得る必要がある。このため、例えば、カメラによる撮像画像を用いて制御を行うようにした公知の車線維持装置や、後方カメラの撮像画像を用いて駐車支援を行うようにした公知の駐車アシスト装置等が車両に搭載されていたとしても、これら車線維持装置や駐車アシスト装置のカメラを流用することができないため、車線位置検出用のカメラを新たに装備する必要があり、コストアップにつながっている。
【0005】
また、このように、車線位置検出用のカメラを用いて車線位置検出を行ったとしても、雨や、雪等といった、悪天候時には、車線位置検出の判断能力が低下するという問題がある。
そこで、この発明は、上記従来の未解決の問題に着目してなされたものであり、車線位置検出用のカメラを設けることなく、悪天候時であっても、的確に車線位置を検出することの可能な車両位置推定方法、車両用走行支援装置及び車両位置推定方法を提供することを目的としている。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本発明に係る車両位置推定装置は、一の車両が走行中の道路の、前記一の車両の走行車線と同一方向の車線である同一方向車線の車線数を検出し、また、前記同一方向車線上の他の車両の、一の車両に対する相対位置を検出する。そして、同一方向車線の車線数と、自車両と同一方向の車線上の他の車両の、前記一の車両に対する相対位置とに基づいて、一の車両の、前記道路上における道路幅方向の位置を推定する。
【発明の効果】
【0007】
本発明に係る車両位置推定装置によれば、一の車両の走行車線と同一方向の車線である同一方向車線の車線数と、同一方向車線上の他の車両の、一の車両に対する相対位置とに基づいて、一の車両の、道路上における道路幅方向の位置を推定するから、一の車両と同一方向の車線上の他の車両の、一の車両に対する相対位置情報を相対位置検出手段で検出することにより、前方カメラ等による撮像画像やレーダ等を用いることなく、一の車両の道路幅方向の位置を推定することができる。
【発明を実施するための最良の形態】
【0008】
以下、本発明の実施の形態を説明する。
まず、第1の実施の形態を説明する。
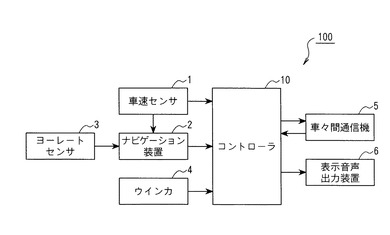
図1は、本発明を適用した走行支援装置100の一例を示す構成図である。
図1中、1は、自車両の走行速度を検出する車速センサ、2は、GPS等の自車位置検出手段を備え、予め保持している道路地図情報のうち、自車位置検出手段で検出した自車両周辺の道路地図情報を抽出し、自車両の現在位置、進行方向及びその周辺の道路地図情報を後述のコントローラ10に出力するナビゲーション装置である。
【0009】
また、車両には、車両に発生するヨーレートを検出するヨーレートセンサ3が搭載され、ナビゲーション装置2では、前記車速センサ1で検出した自車速と、ヨーレートセンサ3からのヨーレートとをもとに、デッドレコニングによる自車位置の推定が可能に構成されている。つまり、例えば、トンネル内を走行している場合等、GPS衛星からの情報を受信することができず、GPSで自車両の現在位置を推定することができないときには、デッドレコニングにより、自車両の現在位置を推定する。
【0010】
また、車両には、周囲に存在する周囲車両との間で車々間通信を行い、互いの走行情報を授受するための車々間通信機5が搭載されている。そして、コントローラ10は、車速センサ1からの自車速、ナビゲーション装置2からの自車両の現在位置、進行方向及び自車両周辺の道路地図情報、ウインカ4の操作状況及び、車々間通信機5から周囲車両の走行情報を獲得し、自車両の走行情報を前記車々間通信機5により周囲車両に報知すると共に、前記各種情報に基づき自車両の車線位置を推定して推奨する車線位置を演算し、演算結果を、表示音声出力装置6により運転者に報知する。なお、周囲車両も自車両と同様の機能構成を備えている。
【0011】
図2は、コントローラ10で実行される演算処理の処理手順の一例を示すフローチャートである。コントローラ10では、この演算処理を予め設定された所定周期で実行する。
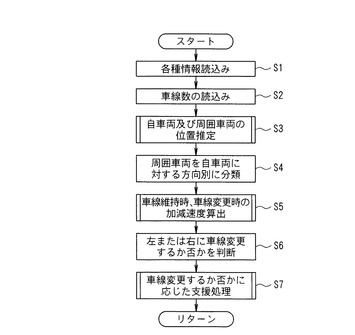
まず、ステップS1で、各種センサ等の検出信号を読み込む。具体的には、車速センサ1からの自車速Vh、ナビゲーション装置2からの自車両の位置座標及び進行方向(x0,y0,dir0)を読み込む。
【0012】
また、車々間通信機5から周囲車両の走行情報を読み込む。前記走行情報は、例えば、周囲車両の位置座標、進行方向、走行速度、及び加減速度で構成される。そして、各車両からの走行情報をそれぞれ、自車両の現在位置を原点、自車両の進行方向を零とした座標上の情報に変換する。そして、n台の周囲車両から走行情報を受信したとすると、変換後の、各走行情報に識別番号“1〜n”を付与して管理する。すなわち、(x1,y1,dir1)、(x2,y2,dir2)、……、(xn,yn,dirn)として管理する。
【0013】
次いで、ステップS2に移行し、自車両が走行する道路の自車両の進行方向と同一方向の車線を同一方向車線としたとき、この同一方向車線の車線数Nlaneを、ナビゲーション装置2から獲得する。
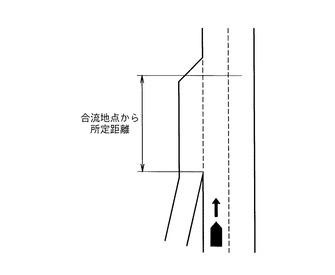
そして、自車両が走行する道路上に、左又は右方向に分岐が存在する場合には、分岐位置よりも所定距離だけ手前の区間において、分岐のための車線相当数をNlaneに加算する。また、自車両が走行する道路上に、左又は右方向からの合流が存在する場合には、合流位置から所定距離先までの区間において、合流のための車線相当数をNlaneに加算する。
【0014】
例えば、図3に示すように、自車両が2車線道路を走行しており、自車両前方に合流が存在する場合には、合流地点から所定距離先までの区間では、ナビゲーション装置2から獲得した同一方向車線の線数Nlaneに、合流のための車線相当数“1”を加算し、これをNlaneとする。すなわち、Nlaneは“3”となる。
なお、分岐が存在する場合の所定距離は、前記分岐のために設けられている車線の距離相当の値に設定され、同様に、合流が存在する場合の所定距離は、前記合流のために設けられている車線の距離相当の値に設定される。
【0015】
次いで、ステップS3に移行し、自車両及び周囲車両がどの車線上に存在するかを推定すると共に、その信頼度及び自車両の右側及び左側に車線が存在する信頼度を算出する。具体的な処理については後述する。
次いで、ステップS4に移行し、自車両と周囲車両との相対位置関係と、前記ステップS3で推定した、自車両及び周囲車両がどの車線に存在しているかの情報とに基づき、周囲車両が、自車両に対してどの位置に存在するかを分類する。具体的には、自車両の車線と隣接する右車線上の右前方(FR)、自車両と同一車線上の前方(FC)、自車両の車線と隣接する左車線上の左前方(FL)、自車両の車線と隣接する右車線上の右後方(RR)、自車両と同一車線上の後方(RC)、自車両の車線と隣接する左車線上の左後方(RL)に分類する。例えば、自車両が第2車線、周囲車両がその右隣の第3車線に位置し、且つ、周囲車両が自車両よりも前方に存在する場合には、周囲車両は自車両に対して右前方(FR)に存在することになる。
【0016】
そして、自車両の右前方(FR)に存在する複数の周囲車両について、自車両と周囲車両との間の距離dFR(1)、……、dFR(mFR)を算出すると共に、前記周囲車両の速度をvFR(1)、……、vFR(mFR)として設定する。さらに、分岐、合流等により自車両の右前方の車線がなくなる場合には、dFR(mFR+1)及びvFR(mFR+1)を追加し、dFR(mFR+1)として、自車両の現在位置から、右前方の車線がなくなる位置までの距離を設定し、また、vFR(mFR+1)として“0”を設定する。なお、前記mFRは、自車両の右前方に存在する車両の台数である。
【0017】
同様に、自車両の前方(FC)に存在する複数の周囲車両について、自車両と周囲車両との間の距離dFC(1)、……、dFC(mFC)を算出すると共に、前記周囲車両の速度をvFC(1)、……、vFC(mFC)として設定する。さらに、分岐、合流等により自車両が走行中の車線が将来なくなる場合には、dFC(mFC+1)及びvFC(mFC+1)を追加し、dFC(mFC+1)として、自車両の現在位置から車線がなくなる位置までの距離を設定し、また、vFC(mFC+1)として“0”を設定する。なお、mFCは自車両の前方に存在する車両の台数である。
【0018】
また、自車両の左前方(FL)に存在する複数の周囲車両について、自車両と周囲車両との間の距離dFL(1)、……、dFL(mFL)を算出すると共に、前記周囲車両の速度をvFL(1)、……、vFL(mFL)として設定する。さらに、分岐、合流等により、自車両の左前方の車線がなくなる場合には、dFL(mFL+1)及びvFL(mFL+1)を追加し、dFL(mFL+1)として、自車両の現在位置から左前方の車線がなくなる位置までの距離を設定し、また、vFL(mFL+1)として“0”を設定する。なお、mFLは自車両の左前方に存在する車両の台数である。
【0019】
なお、前記自車両の現在位置から、右前方、前方、左前方の車線がなくなる位置までの距離は、例えば、ナビゲーション装置2の道路地図情報として、右前方、前方、左前方の車線がなくなる位置の位置情報を含めておき、この車線がなくなる位置の位置情報を、ナビゲーション装置2から獲得し、自車両の現在位置と車線がなくなる位置の位置情報とに基づいてこれら間の距離を算出すればよい。
【0020】
さらに、自車両の右後方(RR)に存在する先頭の周囲車両について、自車両と周囲車両との間の距離dRRを算出し、前記周囲車両の速度をvRRとして設定する。同様に、自車両と同一車線上の後方(RC)に存在する先頭の周囲車両について、自車両と周囲車両との間の距離dRCを算出し、前記周囲車両の速度をvRCとして設定する。さらに、自車両の左後方(RL)に存在する先頭の周囲車両について、自車両と周囲車両との間の距離dRLを算出し、前記周囲車両の速度をvRLとして設定する。
【0021】
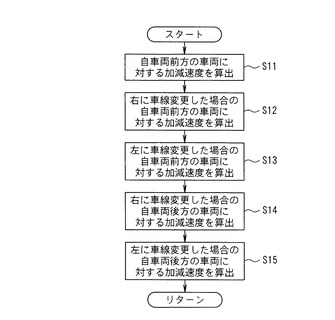
次いで、ステップS5に移行し、自車両が現在の車線を維持した場合、右に車線変更した場合及び左に車線変更した場合のそれぞれについて、自車両に必要な加減速度を算出する。
具体的には、図4に示すように、まず、ステップS11で、自車両が現在の車線を維持した場合について、自車両が前方車両と所定距離を保って走行するために必要な加減速度を算出する。
【0022】
まず、自車両と同一車線上の前方に存在する複数の周囲車両のそれぞれに対する、自車両の加減速度aFC(nFC)(nFC=1〜mFC(自車両の走行車線がなくなる場合には、mFC+1))を、次式(1)にしたがって算出する。つまり、自車両が各周囲車両と、所定の車間時間相当の距離を保って走行するために必要な加減速度を算出する。
aFC(nFC)
=kd・〔dFC(nFC)−Th・vh〕+kv・〔vFC(nFC)−vh〕
……(1)
そして、このようにして算出した各周囲車両に対する加減速度aFC(nFC)のうち、最小値を選択し、これを、自車両が現在の走行車線を維持した場合に、前方の周囲車両と所定の距離を保って走行するために必要な加減速度aFCとする。なお、前記(1)式中の、kdは距離に対するゲイン、kvは相対速度に対するゲイン、Thは車間時間であって、これらは、予め実験等によって設定される。
【0023】
このようにして、自車両が現在の車線を維持した場合に必要な加減速度aFCを算出したならばステップS12に移行し、自車両の車線と隣接する右車線上の前方に存在する複数の周囲車両と自車両との関係から、自車両が右に車線変更した場合に、自車両がその前方車両と所定距離を保って走行するために必要な加減速度を算出する。
まず、自車両の車線と隣接する右車線上の前方に存在する複数の周囲車両それぞれに対する、自車両の加減速度aFR(nFR)(nFR=1〜mFR(自車両の車線と隣接する右車線がなくなる場合には、mFR+1))を、次式(2)にしたがって算出する。
aFR(nFR)
=kd・〔dFR(nFR)−Th・vh〕+kv・〔vFR(nFR)−vh〕
……(2)
【0024】
そして、このようにして算出した各周囲車両に対する加減速度aFR(nFR)のうち、最小値を選択し、これを、自車両が右に車線変更した場合に必要な自車両の加減速度aFRとする。なお、前記(2)式中の、kdは距離に対するゲイン、kvは相対速度に対するゲイン、Thは車間時間であって、これらは、予め実験等によって設定される。
【0025】
次いで、ステップS13に移行し、ステップS12の処理と同様の手順で、自車両の車線と隣接する左車線上の前方に存在する複数の周囲車両それぞれに対する、自車両の加減速度aFL(nFL)(nFL=1〜mFL(自車両の車線と隣接する左車線がなくなる場合には、mFL+1))を、次式(3)にしたがって算出する。
aFL(nFL)
=kd・〔dFL(nFL)−Th・vh〕+kv・〔vFL(nFL)−vh〕
……(3)
【0026】
そして、このようにして算出した各周囲車両に対する加減速度aFL(nFL)のうち、最小値を選択し、これを、自車両が左に車線変更した場合に、自車両が前方車両と所定距離を保って走行するために必要な加減速度aFLとする。なお、前記(3)式中の、kdは距離に対するゲイン、kvは相対速度に対するゲイン、Thは車間時間であって、これらは、予め実験等によって設定される。
【0027】
次いで、ステップS14に移行し、今度は、自車両の車線と隣接する右車線上の後方に存在する先頭の周囲車両と自車両との関係から、自車両が右に車線変更した場合に、右後方車両に接近されないために必要な自車両の加減速度aRRを、次式(4)から算出する。
aRR=kd・〔Th・vh−dRR〕+kv・〔vRR−vh〕 ……(4)
【0028】
そして、自車両が右に車線変更した場合に右後方車両に接近されないために必要な加減速度aRRが予め設定した加速度のしきい値よりも大きいか、又は前記ステップS3で推定した自車両の右側に車線が存在する信頼度が予め設定したそのしきい値よりも小さいとき、つまり、右側に車線がないか、右側に車線変更をすると右後方車両に接近されてしまう場合には、右側には車線変更できないと判断する。
【0029】
次いで、ステップS15に移行し、今度は、自車両の車線と隣接する左車線上の後方に存在する先頭の周囲車両と自車両との関係から、自車両が左に車線変更した場合に、左後方車両に接近されないために必要な自車両の加減速度aRLを、次式(5)から算出する。
aRL=kd・〔Th・vh−dRL〕+kv・〔vRL−vh〕 ……(5)
【0030】
そして、この自車両が左に車線変更した場合に左後方車両に接近されないために必要な加減速度aRLが予め設定した加速度のしきい値よりも大きいか、又は前記ステップS3で推定した自車両の左側に車線が存在する信頼度が予め設定したそのしきい値よりも小さいとき、つまり、左側に車線がないか、左側に車線変更をすると左後方車両に接近されてしまう場合には、左側には車線変更できないと判断する。
【0031】
このようにして、現在の車線を維持する場合、及び車線変更した場合について自車両で必要な加減速度を算出したならば、図2に戻って、ステップS6に移行し、ステップS5で算出した加減速度の演算結果に基づいて車線変更を行うかどうかを判断する。
具体的には、前記図4のステップS14及びステップS15の処理で、後方車両との関係から、右車線及び左車線の何れの方向にも車線変更を行うことは不可と判断されるときには、このまま現在の車線を維持すると判定する。
【0032】
一方、後方車両との関係から、左側への車線変更は可能であるが右側への車線変更は不可と判断されるときには、左に車線変更した場合に必要な加減速度aFLが、現在の車線を維持する場合に必要な加減速度aFCよりも大きいとき(aFL>aFC)、つまり、左に車線変更した方がより高速での走行が可能と判断されるときには、左に車線変更すると判断する。そして、aFL>aFCを満足しないとき、つまり、左に車線変更をしても現在よりも高速での走行はできないと予測されるときには、現在の車線を維持すると判断する。
【0033】
また、後方車両との関係から、左側への車線変更は不可であるが右側への車線変更は可能と判断されるときには、右に車線変更した場合に必要な加減速度aFRが、現在の車線を維持する場合に必要な加減速度aFCよりも大きいとき、つまり、右に車線変更した方がより高速での走行が可能と判断されるときには、右に車線変更すると判断する。そして、aFR>aFCを満足しないとき、つまり、右に車線変更をしても現在よりも高速での走行はできないと予測されるときには、現在の車線を維持すると判断する。
【0034】
また、後方車両との関係から、左側及び右側への車線変更が共に可能と判断されるときには、左に車線変更した場合に必要な加減速度aFL、右に車線変更した場合に必要な加減速度aFR、現在の車線を維持した場合に必要な加減速度aFCの3つの値を比較する。そして、左に車線変更した場合に必要な加減速度aFLが最大の場合には、左に車線変更すると判断し、右に車線変更した場合に必要な加減速度aFRが最大の場合には、右に車線変更すると判断し、これ以外の場合には現在の車線を維持すると判断する。つまり、左又は右に車線変更した方が、より高速での走行が可能と判断されるときには、左又は右に車線変更を行い、それ以外の場合には、現在の車線を維持する。
【0035】
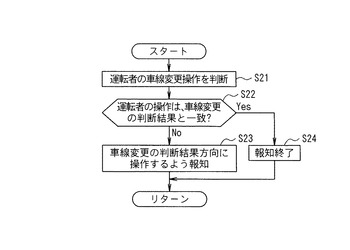
次いで、ステップS7に移行し、ステップS6での車線変更の判断結果に基づき、走行支援を行う。
具体的には、図5に示すように、ステップS21で、ウインカ4の作動状況から、運転者が現在の車線を維持しているか、車線変更中であるかを判断する。
次いで、ステップS22に移行し、ウインカの作動状況から推測される、運転者が車線維持を行っているか、車線変更を行っているかといった運転者の操作状況と、前記ステップS6での車線変更の判断結果、つまり、車線を維持するか、右又は左に車線変更するかどうかの判断結果とが一致するかを判断する。
【0036】
そして、これらが一致しないときには、ステップS23に移行し、表示音声出力装置6を作動させ、車線変更の判断結果で特定される車線維持を行うか、左方向、又は、右方向に車線変更を行うように、運転者に報知する。
一方、ウインカ4の作動状況から推測される運転者の操作状況と、車線変更の判断結果とが一致するときには、ステップS24に移行し、表示音声出力装置6により車線変更或いは車線維持の報知を行っている場合にはこれを終了させる。
【0037】
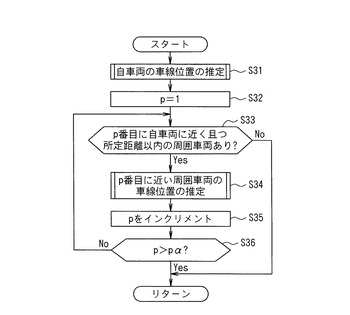
次に、前記図2のステップS3の処理で実行される、自車両及び周囲車両の位置推定の処理手順を、図6を伴って説明する。
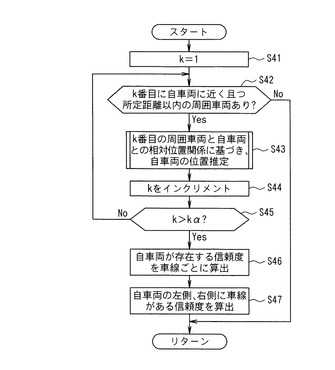
まず、ステップS31で、自車両の車線位置を推定する。具体的には、図7に示すフローチャートに基づいて推定する。
まず、ステップS41で、自車両の周囲車両の台数をカウントするためのカウンタkを“1”に初期化する。
【0038】
次いで、ステップS42に移行し、自車両及び周囲車両の位置情報に基づき、自車両からk番目に近い位置に存在する周囲車両が存在するかどうか、また、その周囲車両が自車両から所定距離以内に存在するかどうかを判断する。そして、このような周囲車両が存在しない場合には処理を終了する。なお、前記所定距離は、自車両の車線位置推定結果の精度を確保することの可能な距離相当の値に設定される。
【0039】
そして、ステップS42の処理で、自車両からk番目に近い位置に存在し、且つ自車両から所定距離以内に存在する周囲車両が存在する場合にはこの周囲車両を自車両の位置検出用車両とし、ステップS43に移行し、自車両と周囲車両kとの相対位置関係に基づき車線位置推定を行う。具体的には、図8に示す手順で推定する。
まず、車線位置の推定対象となる車両を推定対象車両iとし、この推定対象車両iの周辺に存在する車両を、推定対象車両iの位置検出用車両kとする。この場合、自車両の車線位置を推定するから、自車両が推定対象車両iとなり、k番目に自車両に近く且つ所定距離以内に存在する、k番目の周囲車両が、自車両の位置検出用車両すなわち、推定対象車両iの位置検出用車両kとなる。
【0040】
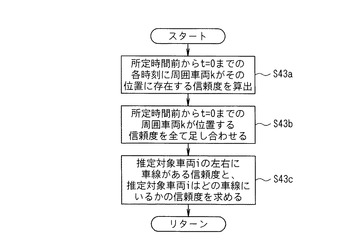
そして、ステップS43aで、現時点をt=0としたとき、予め設定した所定時間前から現時点t=0までの各時刻に、位置検出用車両kの位置情報で特定される位置に位置検出用車両kが存在したとする信頼度の分布rを求める。
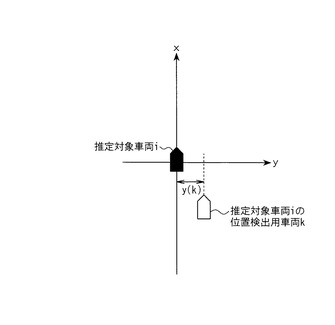
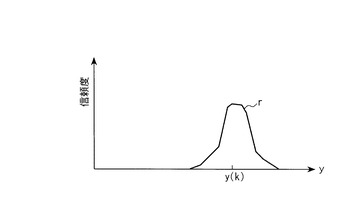
まず、推定対象車両iに対する位置検出用車両kの相対位置情報を算出し、これを所定の履歴情報として所定の記憶領域に格納する。この記憶領域は所定時間分の相対位置情報を記憶可能に構成されている。そして、図9に示すように、推定対象車両iの位置を原点とする座標を考え、道路幅方向をy、前後方向をxとしたとき、推定対象車両iに対して道路幅方向に距離y(k)だけ離れた位置に、その位置検出用車両kが存在する場合の信頼度を、例えば、図10に示すように設定する。つまり、信頼度は、図10に示すように、推定対象車両iに対する道路幅方向の距離yを中心に分布しているとして設定し、また、その大きさは、推定対象車両iと、その位置検出用車両kとの間の距離が短いほど大きくなるように設定し、また、最新のデータであるほど大きくなるように設定する。
【0041】
そして、現時点t=0から、所定時間前の時点までの各時刻における、周囲車両kの道路幅方向の距離yの変化、つまり、推定対象車両iに対する周囲車両kの位置座標の変化に応じて、それぞれの信頼度を算出する。なお、現時点t=0から所定時間前の時点までの各時刻における推定対象車両iに対する周囲車両kの相対位置情報は、前記記憶領域に履歴情報として格納しておく。
【0042】
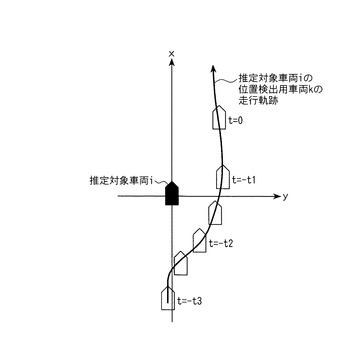
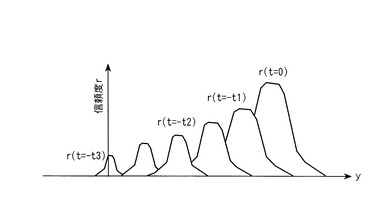
例えば、図11に示すように、推定対象車両iと同一車線上の後方に位置検出用車両kが存在する状態から、位置検出用車両kが、推定対象車両iの右側車線に車線変更し、位置検出用車両kが自車両の右前方を走行する状態となった場合には、所定時間前の時点を“−t3”とすると、t=−t3からt=0となるまでの間の各時刻において、位置検出用車両kがその位置に存在したとする信頼度は、図12に示すように、現時点t=0に近づくほど信頼度の分布が大きくなり、また、推定対象車両iに対する位置検出用車両kの道路幅方向の距離yが大きくなるほど信頼度の分布は大きくなる。
【0043】
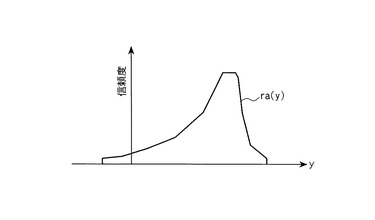
次いで、ステップS43bに移行し、現時点t=0から所定時間前までの間の各時刻における信頼度を全て足し合わせる。例えば、図12の場合には、時刻“−t3、−t2、−t1、0、”の各時点における信頼度分布r(t=−t3)、r(t=−t2)、r(t=−t1)、r(t=0)を足し合わせ、図13に示す、所定期間における、位置検出用車両kの存在位置の信頼度分布ra(y)を獲得する。つまり、推定対象車両iの位置を原点とした場合の、推定対象車両iに対し、その位置検出用車両kが、現在どの位置に存在するかを表す信頼度分布を獲得する。
【0044】
次いで、ステップS43cに移行し、推定対象車両iが、各車線に存在する信頼度及び、推定対象車両iの右側及び左側に車線が存在する信頼度を算出する。
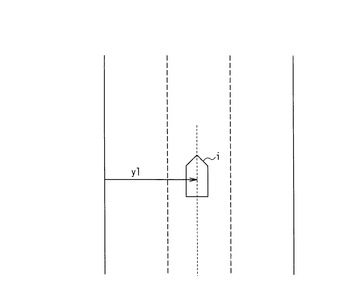
まず、図14に示すように、推定対象車両iが、道路の右端から車幅方向に距離ylだけ離れた絶対位置に存在すると仮定した場合、図13に示す、推定対象車両iに対する位置検出用車両kの相対位置の信頼度分布ra(y)を用いると、推定対象車両iの絶対位置の信頼度の分布は次式(6)で表すことができる。
【0045】
【数1】

【0046】
なお、(6)式中のWrは、車線幅である。この車線幅は、例えば、ナビゲーション装置2の道路地図情報として、予め車線幅情報を含めておき、道路地図情報として獲得するようにすればよい。
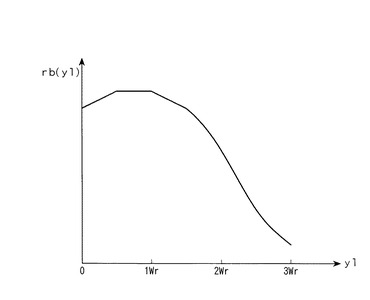
例えば、信頼度分布ra(y)が、図13に示すような分布となる場合、推定対象車両iの絶対位置の信頼度分布yb(yl)は、図15に示すような分布となる。なお、図15において、横軸はyl、縦軸は、推定対象車両iの絶対位置の信頼度分布yb(yl)である。
そして、前記(6)式から、推定対象車両iが、各車線1〜sに存在する信頼度R1(k)〜Rs(k)は、次式(7)で表すことができる。なお、車線数sは、ナビゲーション装置2の道路地図情報として予め設定しておき、ナビゲーション装置2から獲得すればよい。
【0047】
【数2】
【0048】
例えば、図15の場合には、位置検出用車両kの信頼度分布に基づく、推定対象車両iが第1車線にいる信頼度R1(k)は、ylが“0〜1Wr”の範囲となり、推定対象車両iが第2車線にいる信頼度R2(k)は、ylが“1Wr〜2Wr”の範囲となり推定対象車両iが第3車線にいる信頼度R3(k)は、ylが“2Wr〜3Wr”の範囲となる。図15から、推定対象車両iが第1車線及び第2車線にいる信頼度が大きいことから、推定対象車両iは、第1車線又は第2車線にいる可能性が高いと予測することができる。
そして、推定対象車両iの右側及び左側に車線が存在する信頼度は、次式(8)から算出する。
【0049】
【数3】
【0050】
例えば、図15の場合には、推定対象車両iの右側に車線が存在する信頼度は、“0〜2Wr”の範囲、推定対象車両iの左側に車線が存在する信頼度は、“1Wr〜3Wr”の範囲で表されることから、推定対象車両iの右側及び左側に車線が存在する信頼度共に比較的大きな値となり、推定対象車両iの右側及び左側に共に車線が存在する可能性が高いと推測される。
【0051】
このようにして、推定対象車両iの車線位置及び、その左右に車線が存在するかどうかの信頼度を算出したならば、図7に戻ってステップS44に移行する。
このステップS44では、カウンタkを“1”だけインクリントした後、ステップS45に移行し、カウンタkが予め設定したしきい値kαよりも大きくなったかどうかを判断する。このしきい値kαは、自車両の車線位置推定及び自車両の左側及び右側に車線が存在する信頼度の精度を確保することの可能な値に応じて設定される。
【0052】
そして、カウンタkがしきい値kα以下である場合にはステップS42に戻り、上記と同様にして、自車両にk番目に近い周囲車両であり、且つ自車両との距離が所定距離以内に存在する位置検出用車両kに基づいて、自車両の車線位置及び自車両の右側及び左側に車線が存在する信頼度を推定する。
そして、ステップS45の処理で、カウンタkがしきい値kαよりも大きくなったとき、ステップS46に移行し、各位置検出用車両に基づいて推定した信頼度に基づいて、各車線における自車両が存在する信頼度R1〜Rs(sは車線数)を、次式(9)から算出する。
【0053】
【数4】
【0054】
つまり、自車両が第1車線に存在する信頼度R1は、kα台の位置検出用車両に基づき、自車両の車線位置を推定した場合の第1車線に自車両が存在する信頼度の総和により算出されることになり、同様に、他の各車線に存在する信頼度は、kα台の位置検出用車両のそれぞれに基づき自車両の車線位置を推定した場合の各車線に自車両が存在する信頼度の総和により算出される。
このようにして、自車両が各車線に存在する信頼度R1〜Rsを算出したならば、ステップS47に移行し、自車両の右側及び左側に車線が存在する信頼度Rright及びRleftを次式(10)から算出する。
【0055】
【数5】
【0056】
つまり、自車両の右側及び左側に車線が存在する信頼度Rright及びRleft1は、kα台の周囲車両のそれぞれに基づき、自車両の右側及び左側に車線が存在するかどうかを推定した場合の信頼度の総和により算出されることになる。
このようにして、各車線における自車両が存在する信頼度(ステップS46)及び自車両の右側及び左側に車線が存在する信頼度(ステップS47)を算出したならば、図6に戻って、ステップS32に移行する。
【0057】
このステップS32では、処理する周囲車両、すなわちその車線位置を検出すべき周囲車両の台数をカウントするためのカウンタpを“1”に初期化する。次いでステップS33に移行し、自車両と周囲車両の位置座標に基づいて、自車両からp番目に近い位置に存在する周囲車両であり、自車両から所定距離以内に位置する周囲車両が存在するかどうかを判断し、これらを満足する周囲車両が存在しない場合にはそのまま処理を終了するが、該当する周囲車両が存在する場合にはステップS34に移行する。つまり、自車両からの距離が比較的遠く、自車両が車線変更を行うにあたってその周囲車両の動向を考慮する必要のない周囲車両については、その車線位置の検出は行わない。
【0058】
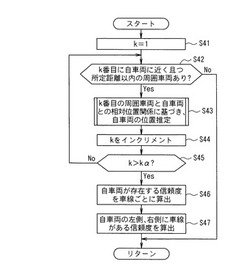
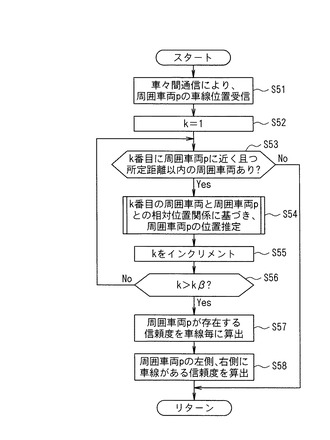
前記ステップS34では、自車両にp番目に近い位置に存在する周囲車両の車線位置の推定を行う。この処理は、図16に示すように、まず、ステップS51で車々間通信機5により、自車両にp番目に近い位置に存在する周囲車両の走行情報を獲得し、その中に、この周囲車両の車線位置を表す車線位置情報が含まれていればこれを抽出する。
次いで、ステップS52に移行し、処理する周囲車両の台数、つまり、前記p番目の周囲車両の車線位置の推定を行うにあたって必要な周囲車両すなわち位置検出用車両の台数をカウントするためのカウンタkを“1”に初期化する。
【0059】
次いで、ステップS53に移行し、p番目の周囲車両に対し、k番目に近い位置に存在する周囲車両であり、且つp番目の周囲車両との間の距離が所定距離以内に存在する周囲車両が存在するかどうかを判断し、該当する周囲車両がない場合にはそのまま処理を終了するが、該当する周囲車両が存在する場合にはこの周囲車両を位置検出用車両とし、ステップS54に移行し、p番目の周囲車両とその位置検出用車両である周囲車両kとの相対位置関係に基づき、p番目の周囲車両の道路上の位置、すなわち車線位置を推定する。
【0060】
この推定は、前記図8の処理と同様の手順で行う。この場合、車線位置の推定対象となる車両は、p番目の周囲車両であるから、推定対象車両iをp番目の周囲車両とし、このp番目の周囲車両と、このp番目の周囲車両との間の距離が所定距離以内に存在する周囲車両に基づいて、p番目の周囲車両の車線位置及び自車両の左右に車線が存在するかどうかの信頼度を算出する。
【0061】
次いで、ステップS55に移行し、カウンタkをインクリメントし、カウンタkがそのしきい値kβ以下であるときには、ステップS53に戻る。そして、推定対象車両iであるp番目の周囲車両にk番目に近い位置に存在し、且つp番目の周囲車両から所定距離以内に存在する周囲車両に基づき、p番目の周囲車両の車線位置を推定し、同様の手順でカウンタkを順次更新して推定対象車両iであるp番目の周囲車両の車線位置を推定し、カウンタ値kがしきい値kβより大きくなったとき、ステップS57に移行する。なお、前記しきい値kβは、p番目の周囲車両の車線位置推定及びp番目の周囲車両の左側及び右側に車線が存在する信頼度の精度を確保することの可能な値に応じて設定される。
【0062】
前記ステップS57では、p番目の周囲車両が存在する信頼度を車線毎に算出する。この信頼度の算出は、前記図7のステップS46の処理と同様の手順で算出するが、ステップS51の処理で、p番目の周囲車両からその車線位置情報を受信している場合には、この車線位置情報で特定される車線位置の信頼度も、各車線位置における信頼度の総和に加算する。前記車線位置情報で特定される車線位置の信頼度は、予め設定した固定値を加算してもよく、また、p番目の周囲車両からその車線位置情報の信頼度を設定して車線位置情報と共に送信するようにしてもよい。この場合、例えば、p番目の周囲車両で車線位置を、例えば前方カメラの撮像画像に基づいて検出している場合等には、天候等に応じて信頼度を設定すれば、より的確な信頼度を設定することができる。
【0063】
次いで、ステップS58に移行し、前記図7のステップS47の処理と同様の手順でp番目の周囲車両の右側及び左側の車線に周囲車両が存在するかどうかの信頼度を算出する。
このようにして、p番目の周囲車両について、その車線位置及びp番目の周囲車両の右側及び左側に車線が存在する信頼度を算出したならば、図6に戻ってステップS35に移行し、カウンタpをインクリメントした後、ステップS36に移行する。そして、カウンタpが予め設定したそのしきい値pα以下であるときにはステップS33に戻って、自車両に、次に近い位置に存在し且つ自車両からの距離が所定距離以内の位置に存在する周囲車両pについて、同様の手順でその車線位置の推定を行う。
【0064】
そして、カウンタpがそのしきい値pαよりも大きくなったとき、自車両及びその周囲車両の車線位置の信頼度の算出及び、右側及び左側に車線が存在する信頼度の算出を終了する。
つまり、図2のステップS3の処理では、自車両の周辺に位置する周囲車両を自車両の位置検出用車両とし、これらに位置検出用車両に基づいて自車両の車線位置を推定すると共に、自車両の周囲車両の車線位置を、この周囲車両の周辺に位置する他の車両をその位置検出用車両としてこれに基づいて、推定している。
なお、前記カウンタpのしきい値pαは、自車両が車線変更を行うに際し、その動向を考慮すべき周囲車両の台数に応じて設定される。
【0065】
次に、上記第1の実施の形態の動作を説明する。
車々間通信機5では所定周期で車々間通信を行い、自車両の周辺に存在する周囲車両からその走行情報を獲得すると共に、自車両の走行情報を送信する。
コントローラ10では、各種センサからの情報や車々間通信により獲得した周囲車両の走行情報を読み込み(図2のステップS1)、また、ナビゲーション装置2から自車両の現在位置周辺の道路地図情報を獲得し、自車両の現在走行中の走行路及びその前方の走行車線の車線数情報を獲得し(ステップS2)、自車両及び周囲車両の車線位置を推定する(ステップS3)。
【0066】
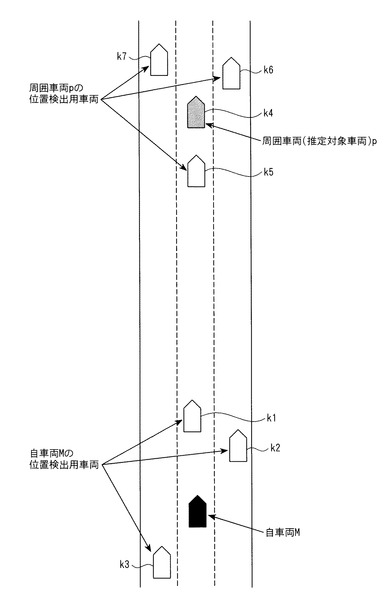
例えば、図17に示すように、自車両Mの周囲に、周囲車両k1〜k7が存在するものとすると、周囲車両k1〜k7のうち、自車両Mからの距離が所定距離以内であるもののうち、自車両に最も近い位置に存在する車両から順に、しきい値kαで特定される台数の周囲車両が、自車両の位置検出用車両となり、これらに基づいて、自車両Mの各車線位置における信頼度が算出される。
【0067】
図17において、前記周囲車両k1〜k3と自車両Mとの間の距離は所定距離以内であるが、周囲車両k4〜k7と自車両Mとの間の距離は所定距離よりも大きいものとし、さらに、しきい値kαは“3”とすると、自車両Mとの間の距離が所定距離以内である周囲車両k1〜k3のうち、自車両に最も近いものから順に、周囲車両k1、k2及びk3の3台の周囲車両が、自車両の位置検出用車両となり、これら位置検出用車両として周囲車両k1〜k3の、自車両Mに対する相対位置関係に基づいて自車両Mの車線位置の信頼度が算出される。
【0068】
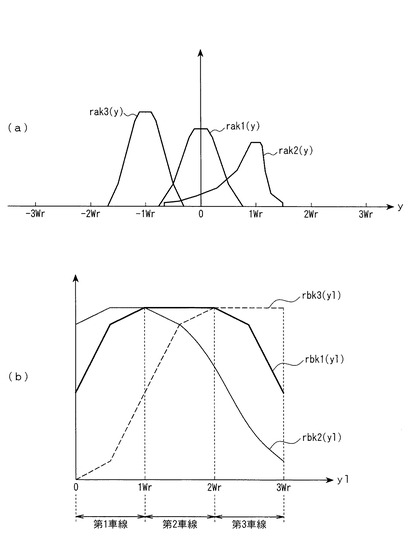
例えば、周囲車両k1は、自車両Mと同一車線上の前方を継続して走行し、周囲車両k2は、前記図11に示すように、自車両Mの後方から自車両Mに隣接する右側車線に車線変更し自車両前方を走行する状態となり、周囲車両k3は自車両Mと隣接する左側車線後方を継続して走行している場合には、自車両Mの現在位置を原点とおいた場合の周囲車両k1の相対位置の信頼度分布rak1(y)、周囲車両k2の相対位置の信頼度分布rak2(y)、周囲車両k3の相対位置の信頼度分布rak3(y)は、それぞれ図18(a)の概念図に示すような分布となる。
【0069】
このため、図18(b)の概念図に示すように、周囲車両k1の相対位置の信頼度分布rak1(y)に基づく自車両Mの絶対位置の信頼度の分布ybk1(yl)は、第2車線で比較的大きな信頼度分布となり、周囲車両k2の相対位置の信頼度分布rak2(y)に基づく自車両Mの絶対位置の信頼度の分布ybk2(yl)は、第1車線及び第2車線で比較的大きな信頼度分布となり、周囲車両k3の相対位置の信頼度分布rak3(y)に基づく自車両Mの絶対位置の信頼度の分布ybk3(yl)は、第2車線及び第3車線で比較的大きな信頼度分布となる。なお、図18(b)は、各信頼度の分布が最大となるときを“1”として記載している。
【0070】
したがって、これら信頼度の総和は、第2車線で最も高くなることから、自車両Mは第2車線に存在すると推測されることになる。さらに、図18(b)の、信頼度分布ybk1(yl)〜ybk3(yl)において、ylが“0〜(s−1)Wr”となる領域、つまり、“0〜2Wr”の領域の信頼度分布の総和が、自車両Mの右側に車線がある信頼度Rrightとして算出され、ylが“1Wr〜s・Wr”となる領域、つまり、“1Wr〜3Wr”の領域の信頼度分布の総和が、自車両Mの左側に車線がある信頼度Rleftとして算出される。図18(b)に示すように、ylが“0〜2Wr”の領域の信頼度分布の総和及び“1Wr〜s・Wr”となる領域の信頼度分布の総和は、共に比較的大きな値となることから、自車両Mの右及び左に車線が存在する信頼度は比較的大きな値となり、自車両Mの右及び左側に車線が存在する可能性が高いと推測されることになる。
【0071】
次に、周囲車両k1の車線位置を推定する場合には、周囲車両k1との間の距離が所定距離以内となる車両は、周囲車両k2、k3及び自車両Mであるから、これら周囲車両k2、k3及び自車両Mが、周囲車両k1の位置検出用車両となり、周囲車両k1の現在位置を原点とおいた場合の周囲車両k2、k3及び自車両Mの相対位置の信頼度分布を算出し、さらに周囲車両k1の絶対位置の信頼度の分布を算出する。そして、周囲車両k2、k3及び自車両Mの相対位置の信頼度分布のそれぞれに基づいて算出した、周囲車両k1の絶対位置の信頼度の分布の総和を算出し、その信頼度が高い車線に、周囲車両k1が存在する可能性が高いと推測すると共に、周囲車両k1の信頼度の分布に基づいて周囲車両k1の右側及び左側に車線がある信頼度を同様の手順で算出する。
【0072】
この場合、周囲車両k1は、自車両Mと同じ車線上に位置し、周囲車両k2、k3、自車両Mの相対位置の信頼度分布は、図18(a)の概念図と同様に、周囲車両k1を基準として左右及び中央に現れることから、周囲車両k1の絶対位置の信頼度の分布は、図18(b)の概念図と同様に各車線位置に、各車両に基づく信頼度分布のピークが現れる波形となる。よって、この場合も第2車線における信頼度分布の総和が最も大きくなり、周囲車両k1は第2車線に存在すると予測される。
【0073】
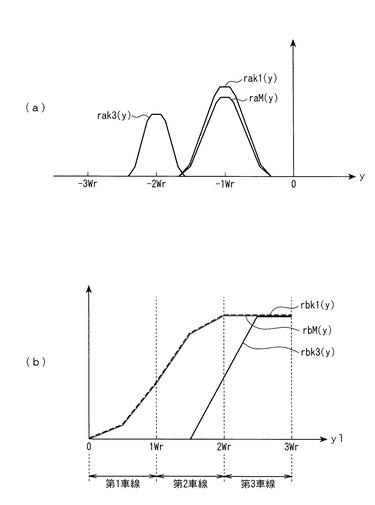
また、例えば、周囲車両k2の車線位置を検出する場合には、周囲車両k1、k3及び自車両Mが、周囲車両k2の位置検出用車両となる。そして、この場合、位置検出用車両は、周囲車両k2の左側に存在することから、各車両の周囲車両k2に対する信頼度分布は、図19(a)の概念図に示すように、周囲車両k1を基準として、yが負である領域での分布となり、各車両に基づく周囲車両k2の絶対位置の信頼度の分布は、図19(b)の概念図に示すように、第3車線位置で最も大きくなる。なお、図19(b)では、各信頼度分布における最大値を“1”として表している。
【0074】
したがって、周囲車両k2は、第3車線にいる可能性が高いと予測される。また、図19(b)に示すように、ylが“0〜2Wr”の領域の信頼度分布の総和は比較的小さいが、“1Wr〜3・Wr”となる領域の信頼度分布の総和は比較的大きいことから、周囲車両k2の右側に車両が存在する可能性は低いが、左側に存在する可能性は高いと推測されることになる。
同様に、周囲車両k3についても、同様の手順で、車線位置を推測すると共に、左側及び右側に車線がある信頼度を算出する。
【0075】
次に、周囲車両k4の車線位置を推測する場合には、周囲車両k4との間の距離が所定距離以内となる周囲車両はk5〜k7であることから、周囲車両k5〜k7のうち、周囲車両k4に近い車両から順に、周囲車両k5、k6、k7の3台の周囲車両が周囲車両k4の位置検出用車両となり、これら位置検出用車両と周囲車両k4との相対位置関係に基づいて、周囲車両k4の車線位置の信頼度分布が算出され、車線位置が推測される。同様に、周囲車両k5〜k7についても、周囲車両k4〜k7の中の各車両間での相対位置関係に基づいて車線位置の信頼度分布が算出され車線位置が推測される。
【0076】
このとき、自車両Mからの距離が所定距離以内である周囲車両、つまり、自車両Mの位置検出用車両の台数がそのしきい値kαよりも少ない場合には、自車両Mの車線位置の信頼度の算出は行わない。したがって、自車両Mの車線位置の信頼度を算出する際に、周囲車両の台数が少ない場合には、算出される信頼度の精度を確保することが困難な場合があるが、信頼度の算出にあたって、その精度を確保することの可能な台数の周囲車両が存在しない場合には、自車両Mの信頼度分布の算出は行わず、すなわち車線位置の推測は行わないから、精度の低い信頼度分布に基づいて、車線位置の推測が行われることを回避することができる。
【0077】
また、同様に、周囲車両k1〜k7の車線位置を推定する場合にも、これら周囲車両k1〜k7からの距離が所定距離以内である周囲車両及び自車両Mを、位置検出用車両としてこれらの位置情報に基づいて信頼度の算出を行い、且つ位置検出用車両の台数がしきい値kαよりも少ない場合には、周囲車両k1〜k7の車線位置の推定は行わないから、精度の低い信頼度分布に基づいて、車線位置の推測が行われることを回避することができる。
【0078】
また、自車両Mは各周囲車両の位置座標情報を、車々間通信により獲得することができ、これら自車両前方の周囲車両が存在する付近の車線数の情報は道路地図情報から獲得することができるから、例えば前記周囲車両k4〜k7を、自車両の運転者が直接目視することができない場合であってもその車線位置を検出することができる。
このようにして、自車両M及び周囲車両k1〜k7の車線位置の推定が行われたならば、各周囲車両k1〜k7の位置情報及び推測した車線位置に基づいて、各周囲車両k1〜k7が自車両Mに対してどの位置に存在するかが分類される(図2のステップS4)。図17の場合、自車両Mの右前方(FR)の車両として、周囲車両k6、k2、前方(FC)の車両として周囲車両k4、k5及びk1、左前方(FL)の車両として周囲車両k7として分類される。また、自車両の左車線後方には、周囲車両k3しか存在しないから、この周囲車両k3が左後方(RL)の車両として分類される。
【0079】
そして、自車両Mが現在の車線位置を維持すると仮定した場合、自車両Mが右又は左側に車線変更する仮定した場合について、自車両Mがその前方に位置する車両との間で所定距離を保って走行するために必要な加減速度が算出される(ステップS5)。
図17に示すように、自車両Mの同一車線上前方には、周囲車両k4、k5及びk1が存在するから、これら各周囲車両に対する自車両Mの加減速度のうち最小値が、自車両Mが車線を維持する場合に必要な加減速度aFCとして設定される。同様に、自車両Mの右側車線上前方には、周囲車両k6及びk2が存在するからこれら各周囲車両に対する自車両Mの加減速度のうち最小値が、自車両Mが右に車線変更した場合に必要な加減速度aFRとして設定され、同様に、自車両Mの左側車線前方に存在する周囲車両k7に対する自車両Mの加減速度が、自車両Mが左に車線変更した場合に必要な加減速度として設定される。さらに、自車両の左後方に存在する周囲車両k3に対する自車両Mの加減速度が、自車両Mが左側に車線変更した場合に必要な加減速度aRLとして設定される。また、図17に示すように、自車両Mの右側後方には周囲車両が存在しないから、自車両Mが右側に車線変更した場合に必要な加減速度aRRは零として設定される。
【0080】
そして、自車両Mの左側に車線がある信頼度Rleftが、予め設定されたしきい値よりも小さく、自車両Mの左側に車線がないか、或いは、自車両Mが左側に車線変更した場合に必要な加減速度aRLがしきい値よりも大きく、左側に車線変更すると後方車両この場合周囲車両k3に接近されると予測されるときには左側への車線変更は不可と判断される。また、この場合、自車両の右後方には周囲車両は存在しないから、自車両Mの右側に車線が存在する信頼度Rrightが予め設定されたしきい値よりも小さく右側に車線がないと判断されるとき、右側への車線変更は不可と判断し、それ以外のときには、車線変更は可能と判断する。
【0081】
そして、現在の車線を維持した場合、右又は左に車線変更した場合の加減速度及び右及び左への車線変更の可不可に基づいて、車線変更を行うか行わないかが判断され、自車両Mが最も高速で走行可能な車線が特定され(ステップS6)、運転者の車線変更の意志の有無や車線変更の方向と、特定結果とが一致しないとき、これが報知される(ステップS7)。
【0082】
また、例えば、図3に示すように、自車両の左側の車線に合流のための車線がある場合には、自車両の左側に車線があるとして車線数を“1”加算し、さらに、追加された車線について、速度が零の車両が存在するとして、左に車線変更した場合に必要な加減速度を算出するが、左車線を走行する車両は速度零であることから、自車両で必要な加減速度は負の比較的大きな値となり、これが左に車線変更した場合に必要な加減速度として選択されることになり、現在の車線を維持する場合に必要な加減速度よりも小さな値となることから、左に車線変更するとの判断は行われない。したがって、図3に示すように自車両の左側に合流のための車線がある場合に、この車線上に周囲車両が存在する場合であっても、合流のための車線が車線変更先の車線として選択されることはなく、的確に車線変更の判断を行うことができる。
【0083】
したがって、上述のように、自車両及び各周囲車両の車線位置を的確に判別することができるから、各車両について特定した車線位置と、車々間通信により獲得した各周囲車両の位置情報や車速等とに基づき、自車両が車線変更をすべきか現在の走行車線を維持するべきかを的確に判断することができる。また、このとき、前述のように、自車両の運転者からは目視できない周囲車両についてもその車線位置や走行情報を自車両Mで把握することができるから、この運転者から目視困難な周囲車両をも考慮して、車線を推奨することができる。したがって、例えば、車線変更先の車線に、自車両の運転者からは目視できない低速走行している周囲車両が存在する場合等には、車線変更した後に、再度もとの車線に戻る等といった無駄な行動を行わざるを得ない場合があるが、車線変更を行う前に、この低速走行している周囲車両を考慮して車線変更を行うことができるから、無駄な車線変更を行う等といった不要な運転行動を行うことを回避することができる。
【0084】
また、上述のように、自車両M及び周囲車両k1〜k7の車線位置は、車線位置の推定対象の車両とその周囲に位置する周囲車両との相対位置関係に基づいて推定しているから、車線位置を検出するため自車両の前方画像を撮像するための広角カメラ等、専用のカメラを設けることなく実現することができ、その分、コストの削減を図ることができる。また、広角カメラ等を用いて車線検出を行う場合、雨や雪等、悪天候時には、車線位置の検出精度が低下する場合がある。しかしながら、上述のように、車線位置の推定は、各車両間の相対位置関係に基づいて推定しているから、確実に車々間通信を行うことの可能な環境下であれば、車線位置検出を高精度に行うことができ、天候等の影響を受けることを回避することができるから、より多くの場面において、走行支援を行うことができる。
【0085】
また、車線位置を推定する際には、図10に示すように、位置検出対象車両iが存在する信頼度を設定し、推定対象車両iと位置検出用対象車両kとの間の距離が短いほど信頼度が大きくなり、且つ、最新のデータであるほど信頼度が大きくなるように設定し、さらに、現時点t=0から、所定時間前の時点までの各時刻における、位置検出用車両kの道路幅方向の距離yの変化に応じて、それぞれの信頼度を算出して推定対象車両iに対する位置検出用車両kの存在位置の信頼度分布ra(y)を獲得し、これに基づいて車線位置の推定を行っているから、推定対象車両iに対する位置検出用車両kの存在位置の精度を考慮して車線位置の推定を行うことができる。また、推定対象車両iと位置検出用車両kとの間の距離が長いときや、位置情報が古い場合には、位置検出用車両kの存在位置情報の信頼度は低くなるが、これを考慮して車線位置推定を行っているから、存在位置情報の精度を考慮して的確に車線位置推定を行うことができる。
【0086】
また、推定対象車両iに対する位置検出用車両kの存在位置情報として、図11に示すように、現時点t=0から所定時間前の時点までの各時刻における、位置検出用車両kの存在位置情報を獲得するようにしているから、例えば現時点で推定対象車両iの周辺に位置検出用車両kとなり得る車両が存在しない場合であっても、所定時間前の時点までの各時刻における位置検出用車両kの存在位置情報に基づいて車線位置推定を行うことができる。また、このように、所定時間の間における複数の存在位置情報に基づいて車線位置を推定しているから、より高精度な車線位置の推定結果を得ることができる。
【0087】
また、車線位置の推定は、推定対象車両の周囲の1台の位置検出用車両だけでなく、複数の周囲車両位置検出用車両との相対位置関係に基づいて推定しているからより高精度に位置推定を行うことができる。
また、車線位置の推定は、自車両がいる道路と自車両との位置関係の信頼度に基づいて推定し、その信頼度に基づいて自車両の車線位置を推定しているから、容易且つ的確に車線位置を推定することができる。
【0088】
また、車線変更を行うかどうかの判断を行う際には、合流や分岐のための車線も考慮して判断するようにしているから、合流や分岐のための車線上に存在する周囲車両の動向をも考慮して車線変更を行うべきかどうかの判断を行うことができる。
なお、上記第1の実施の形態では、各車線における信頼度が最も高い車線に、推定対象車両が存在すると判断する場合について説明したが、例えば、最も信頼度の高い車線の信頼度が、予め設定した基準値を下回る場合、すなわちある程度の信頼度を確保することができない場合には、車線位置推定不可と判断し、車線変更の推奨は行わないようにしてもよく、このようにすることによって、信頼度の低い推奨車線に基づいて車線変更を行うことを回避することができる。
【0089】
次に、本発明の第2の実施の形態を説明する。
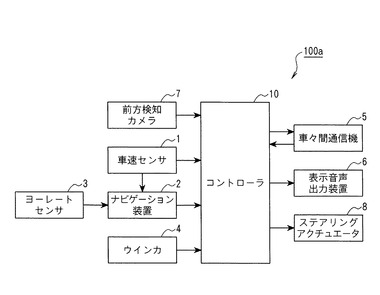
図20は、第2の実施の形態における走行支援装置100aの一例を示す構成図であって、前記図1に示す第1の実施の形態における走行支援装置100において、さらに、自車両前方の道路を撮像し、その撮像映像から自車両の道路端からの距離を検出するための前方検知カメラ7及び、自車両の運転者の操舵操作に関わらず操舵を行うためのステアリングアクチュエータ8が追加されている。前記前方検知カメラ7の撮像画像はコントローラ10に入力され、また、ステアリングアクチュエータ8は、コントローラ10によって制御される。
【0090】
第2の実施の形態におけるコントローラ10の処理手順は、図2に示す第1の実施の形態におけるコントローラ10の処理手順において一部異なること以外は同様であるので同一部の詳細な説明は省略する。
この第2の実施の形態においては、前記図2のフローチャートに示すように、各種センサや車々間通信機5等から各種情報を読み込み(ステップS1)、ナビゲーション装置2から車線情報を読み込んだ後、ステップS3に移行し、自車両及びその周囲車両の車線位置の推定を行う。このとき、周囲車両の車線位置の推定は、上記第1の実施の形態と同様の手順で行うが、自車両Mの車線位置の推定は、図21のフローチャートに示す処理手順にしたがって算出する。
【0091】
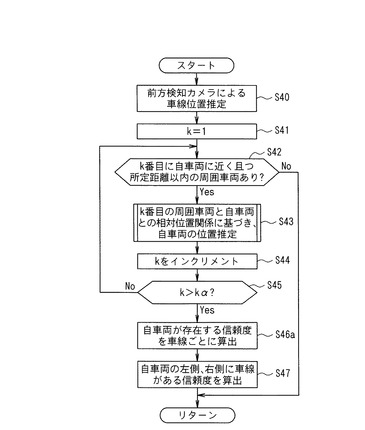
つまり、まず、ステップS40で、前方検知カメラ7の撮像情報に基づいて、車線位置の推定を行い、走行中の道路の車線数に基づいて、自車両の車線位置を推定する。この車線位置の推定は、公知の手順で行えばよく、画像処理を行って道路端からの自車両の車幅方向の距離を検出し、これと、車線幅情報及び走行路の車線数情報等に基づいて自車両がどの車線に存在するかを判断する。
【0092】
なお、ここでは、前方検知カメラ7を用い、その撮像画像に基づいて自車両の車線位置を推定する場合について説明したが、例えば、後方道路を撮像する後方検知カメラを用い、この後方検知カメラの撮像画像に基づいて、道路端から自車両の車幅方向の距離を検出してもよい。また、カメラ等の撮像手段に限らず、例えば、レーダ等の距離計測手段を車両側方に設け、この距離計測手段の検出情報に基づいて道路端からの自車両の車幅方向の距離を検出しこれに基づいて車線位置を推定してもよく、要は、車線位置を推測することの可能な車線位置推測手段であれば適用することができる。
【0093】
そして、カメラ等の撮像手段による撮像画像や、レーダ等の距離計測手段による計測結果等に基づいて自車両の車線位置を推定したならば、推定した車線位置の信頼度を設定する。この信頼度は、走行中の道路の車線数に基づいて車線毎にその車線に自車両が存在する信頼度を設定する。前述のように、カメラやレーダ等を用いた車線位置推定においては、雨天時等天候によってその推定精度が異なるため、天候等、車線位置の推定に影響を及ぼす諸元に応じて信頼度を設定し、例えば雨天時の信頼度は、晴天時に比較して小さくなるように設定する。
【0094】
次いで、ステップS41に移行し、以後、ステップS45の処理まで、上記第1の実施の形態と同様の手順で処理を行い、自車両Mに対する周囲車両の相対位置関係に基づいて自車両Mの車線位置を推定する。そして所定数kαの位置検出用車両に基づいて車線位置を推定したならば、ステップS45からステップS46aに移行し、各位置検出用車両に基づいて推定した自車両の車線位置を総合して、自車両がどの車線位置に存在するかを推測する。
【0095】
このとき、第1車線に自車両が存在する信頼度R1(k)は、各位置検出用車両に基づいて算出した第1車線における信頼度R1(1)〜R1(n)の総和に、さらに、前記ステップS40で設定した、周囲センサとしての前方検知カメラ7の撮像画像から検出した自車両の第1車線における信頼度も加算し、これを第1車線における信頼度R1とする。同様に他の車線に自車両が存在する信頼度についても、各位置検出用車両に基づいて算出した信頼度の総和に、さらに、ステップS40で設定した前方検知カメラ7の撮像画像から検出した自車両の各車線における信頼度も加算する。
【0096】
次いで、ステップS47に移行し、上記第1の実施の形態と同様に自車両Mの右側及び左側に車線がある信頼度を算出し処理を終了する。
つまり、この第2の実施の形態においては、自車両の車線位置を推定する際に、位置検出用車両との相対位置関係だけでなく、前方検知カメラ7の撮像画像から検出した自車両の各車線における信頼度も考慮して、総合的に自車両の車線位置を判断している。したがって、位置検出用車両との間の相対位置関係だけでなく、前方検知カメラ7の撮像画像に基づき検出した車線位置も考慮して総合的に、自車両に車線位置を推定することによってより的確且つ高精度に車線位置の推定を行うことができる。
【0097】
また、前方検知カメラ7の撮像画像に基づき検出した車線位置の信頼度を設定する際に、天候等その検出精度に影響を要因を考慮して信頼度を設定することによって、より的確に車線位置を推定することができる。
そして、このようにして推定した自車両及び周囲車両の車線位置に基づいて、図2のステップS4〜ステップS6の処理を上記第1の実施の形態と同様に実行して自車両Mが現在の車線を維持するべきか、右又は左に車線変更するべきかを判断し、その判断結果に応じてステップS7で走行支援を行う。
【0098】
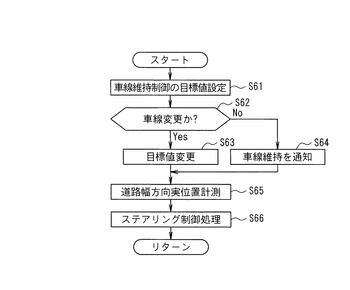
この第2の実施の形態では、図22のフローチャートにしたがって走行支援処理を行い、推奨される車線と自車両の車線位置とに基づいて推奨される車線への車線変更及び車線維持のためのステアリング制御を行う。
まず、ステップS61で、自車両が、現在の車線を維持して走行する際の、自車両の走行位置の目標地点yh*を設定する。この走行位置の目標地点yh*は、公知の手順で設定すればよく、例えば、道路左端を基準として、現在走行中の車線の車線幅方向中央を目標地点yh*として設定し、例えば運転者の操舵操作により車線変更した場合には車線変更後の車線における車線幅方向中央を新たに目標地点yh*として設定する。
【0099】
次いで、ステップS62に移行し、前記図2のステップS6で右又は左に車線変更を行うよう判断されたかどうかを判断し、車線変更を行うと判断された場合には、ステップS63に移行しステップS61で設定した目標地点yh*の更新を行う。すなわち、右に車線変更をするよう判断された場合には、前記ステップS61で設定された目標地点yh*に、走行路の車線幅Wrを加算した値を新たに目標地点yh*(=yh*+Wr)とする。つまり、現在の目標地点yh*として、例えば現在走行中の車線の幅方向中央地点が設定されている状態から、右側車線の幅方向中央地点が目標地点yh*として設定される。一方、左に車線変更するよう判断された場合には、現在の目標地点yh*から車線幅Wrを減算した値を新たにyh*(=yh*−Wr)とし、現在の目標地点yh*として例えば現在走行中の車線の幅方向中央地点が設定されている状態から、左側車線の幅方向中央地点が目標地点yh*として設定される。そして、表示音声出力装置6を作動し、車線変更を行う旨の報知を運転者に対して行った後、ステップS65に移行する。
【0100】
一方、ステップS62で、車線を維持するよう判断された場合には、ステップS64に移行し、前記ステップS61で設定された目標地点yh*の変更は行わず、運転者が車線変更を行おうとしている場合に、表示音声出力装置6を作動し、現在の車線を維持するよう報知を行う。そして、ステップS65に移行する。
【0101】
このステップS65では、前方検知カメラ7の撮像画像に基づき、道路端からの自車両の道路幅方向の距離、すなわち、自車両の現在位置を獲得し、次いで、ステップS66に移行し、ステップS65で検出した自車両の道路上における現在位置と目標地点yh*との偏差を算出し、この偏差が零となるように、ステアリングアクチュエータ8を制御する。例えば、前記偏差を零とするために必要な操舵角変化を実現し得る操舵トルクをステアリングシャフトに付与すること等により、操舵を行う。これによって、前記偏差が零となるように操舵されることによって、車線中央を走行するように操舵制御が行われると共に、右又は左に車線変更を行う場合には、自動的に操舵が行われることになって、自車両は、自動的に右又は左に車線変更が行われることになる。また運転者が操舵操作を行った場合には、操舵操作の妨げとならないように、操舵トルクを抑制したり、制御を中止したりする等といった対処を行う。
【0102】
このように、ステアリングアクチュエータ8による目標地点yh*を、車線変更をするか否かの判断に応じて変更することによって、推奨される車線への車線変更を自動的に行うことができる。
また、車線変更をするか否かの判断は、自車両が右又は左に車線変更したと仮定した場合の、自車両に発生する加減速度を考慮して行っているから、自動的に車線変更が行われた場合であっても、車線変更先の先行する周囲車両や後続する周囲車両との間の車間距離が短くなり過ぎるといった状況になることを回避することができ、自動操舵による車線変更を安全に行うことができる。
【0103】
なお、上記第1の実施の形態においても上記第2の実施の形態と同様の手順で、推奨される車線位置に応じて自動的に車線変更を行うことも可能であることはいうまでもない。
また、周囲車両で、その車線位置を上述のような手順で推定しているとき、或いは前方検知カメラを備え、その車線位置を検出している場合等には、車々間通信により周囲車両の車線位置及びその信頼度情報を獲得し、これを考慮して、上記第2の実施の形態と同様の手順で周囲車両の車線位置を推定するようにしてもよい。
【0104】
次に、本発明の第3の実施の形態を説明する。
この第3の実施の形態は、上記第2の実施の形態において、図2のステップS7で実行される走行支援処理の処理手順が異なること以外は同様であるので同一部の詳細な説明は省略する。
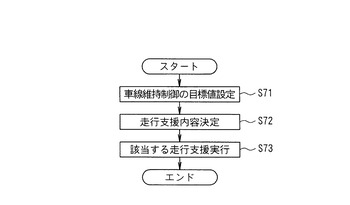
この第3の実施の形態では、図23に示す走行支援処理を行う。つまり、ステップS71で、前記第2の実施の形態における図22のステップS61の処理と同様の手順で、自車両が、現在の車線を維持して走行する際の、自車両の走行位置の目標地点yh*を設定する。次いで、ステップS72に移行し、前記図2のステップS6の処理で、車線変更をするよう判断されたかどうか及び自車両Mの右及び左に車線のある信頼度の大きさに応じて支援内容を決定する。
【0105】
具体的には、右に車線変更を行うよう判断されたときには、自車両Mの右に車線のある信頼度が予め設定した第1のしきい値よりも小さく、自車両Mの右に車線のある可能性が低いと予測されるときには、現在の車線を維持すると判断する。また、右に車線のある信頼度が前記第1のしきい値以上であり且つ第1のしきい値よりも大きい第2のしきい値よりも小さいときには、前記表示音声出力装置6を作動し、表示によって、運転者に対して右に車線変更する旨の報知を行うと判断する。
【0106】
また、右に車線のある信頼度が前記第2のしきい値以上であり且つこの第2のしきい値よりも大きな第3のしきい値よりも小さいときには、前記表示音声出力装置6を作動し、表示及び音声によって運転者に対して右に車線変更する旨の報知を行うと判断する。
また、右に車線のある信頼度が前記第3のしきい値以上であり且つこの第3のしきい値よりも大きな第4のしきい値よりも小さいときには、予め設定した第1の車線変更パターンで右に車線変更すると判断する。さらに、右に車線のある信頼度が前記第4のしきい値以上であるときには、予め設定した第2の車線変更パターンで右に車線変更すると判断する。なお、この第2の車線変更パターンは、前記第1の車線変更パターン1よりも小さな操舵角で車線変更制御を行うように設定されたパターンである。
【0107】
つまり、右に車線変更するよう判断されたときには、右に車線のある信頼度の大きさに応じて、走行支援内容を設定し、信頼度が低いときには、車線変更の報知や表示のみを行い、運転者の操舵操作により車線変更を行うことにより、安全性を確保し、信頼度が高いときには、運転者の操舵操作を伴うことなく自動操舵により速やかな車線変更を行うようにしている。
【0108】
一方、左に車線変更すると判断された場合も、上記と同様であって、左に車線のある信頼度の大きさに応じて、第1から第4のしきい値との大小関係に応じて走行支援内容を決定する。
そして、前記ステップS6の処理で車線を維持すると判断されたときには、現在の車線を維持すると判断する。
このようにして、走行支援内容を決定したならばステップS72からステップS73に移行し、ステップS72で決定した走行支援内容に応じた走行支援を行う。
【0109】
つまり、現在の車線を維持すると判断されたときには、前記ステップS71で設定された目標地点yh*と自車両の現在位置とが一致するように操舵角を制御する。また、運転者が車線変更を行おうとしている場合には現在の車線を維持するよう表示音声出力装置6を作動させて報知する。また、表示により車線変更の報知を行うと判断したときには表示音声出力装置6を作動させ音声によって車線変更を推奨する旨の報知を行う。また、表示及び音声によって車線変更の報知を行うと判断したときには表示音声出力装置6を作動させ表示及び音声によって報知を行う。
【0110】
また、第1の車線変更パターンで車線変更を行うと判断されたときには、ステップS71で設定した目標地点yh*を、右への車線変更の場合には車線幅Wrを加算し、左への車線変更の場合には車線幅Wrを減算した値を目標地点yh*として更新設定し、自車両の現在位置が目標地点yh*と一致するように操舵角を制御するが、このとき操舵角の変化が予め設定した、操舵角変化の小さい第1の車線変更パターンで変化するように制御を行う。また、第2車線変更パターンで車線変更を行うと判断されたときには、同様にして、ステップS71で設定した目標地点yh*を車線幅Wrで補正し、補正後の目標地点yh*と自車両の現在位置とが一致するように操舵角を制御するが、このとき操舵角の変化が、第1車線変更パターンにおける操舵角変の変化量よりも大きな第2車線変更パターンで変化するように制御を行う。つまり、第2車線変更パターンは、第1車速変更パターンに比較して操舵角の変化度合が大きくすなわち速やかな車線変更を実現する。
【0111】
このように、車線変更をするかどうかの判断と、自車両Mの右又は左に車線がある信頼度とに基づいて走行支援内容を判断し、信頼度が低いときには自動操舵による車線変更は行わず信頼度が高いときにのみ自動操舵による車線変更を行うようにしているから安全性をより向上させることができる。
なお、上記各実施の形態においては、自車両及び周囲車両の車線位置を推定し、これに基づいて推奨する車線情報を運転者に提供する場合について説明したが、これに限るものではなく、例えば、自車両周辺の車両の位置情報を道路地図情報と共に情報提供するようにした走行支援装置や、ナビゲーション装置等、自車両や周囲車両の位置情報に基づいて情報提供や走行支援等を行う装置であっても適用することができる。
【0112】
また、上記実施の形態においては、自車両及び周囲車両の車線位置を推定する場合について説明したが、上述のように道路上の、道路幅方向の各地点における、この位置に車両が存在する信頼度を検出することができるから、例えば、車線内の右よりの位置或いは左よりの位置等、車線内のどの位置に存在するかをも検出するようにしてもよく、また、車線単位ではなく、道路幅方向のどの地点に存在する可能性が高いかを検出することも可能である。
【0113】
ここで、上記各実施の形態において、図2のステップS2の処理が車線数検出手段に対応し、図8のステップS43aで、推定対象車両iに対する位置検出用車両kの相対位置情報を算出する処理が相対位置検出手段に対応し、図8のステップS43b及びステップS43cの処理が車両位置推定手段に対応している。
また、図8のステップS43aの処理で、相対位置情報を履歴情報として格納する記憶領域が履歴記憶手段に対応している。
【0114】
また、車々間通信機5が車々間通信手段に対応している。
また、図6のステップS31の処理が自車両位置推定手段に対応し、図6のステップS34の処理が周囲車両位置推定手段に対応し、図2のステップS7の処理が走行支援手段に対応し、図7のステップS47の処理及び図16のステップS58の処理が車線存在信頼度算出手段に対応している。
また、第1の実施の形態において、図7のステップS46の処理及び図16のステップS57の処理が信頼度算出手段に対応し、第2の実施の形態において、図21のステップS46aの処理及び図16のステップS57の処理が信頼度算出手段に対応している。
【図面の簡単な説明】
【0115】
【図1】本発明の車両用走行支援装置の構成を示す構成図である。
【図2】図1のコントローラで実行される演算処理の処理手順の一例を示すフローチャートである。
【図3】車線数の設定方法を説明するための図である。
【図4】図2のステップS5の加減速度の算出処理の処理手順の一例を示すフローチャートである。
【図5】図2のステップS7の走行支援処理の処理手順の一例を示すフローチャートである。
【図6】図2のステップS3の自車両及び周囲車両の車線位置の推定処理の処理手順の一例を示すフローチャートである。
【図7】図6のステップS31の自車両の車線位置の推定処理の処理手順の一例を示すフローチャートである。
【図8】図7のステップS43で自車両の車線位置の信頼度を算出する際の処理手順の一例を示すフローチャートである。
【図9】信頼度の算出方法を説明するための説明図である。
【図10】信頼度の算出方法を説明するための説明図である。
【図11】信頼度の算出方法を説明するための説明図である。
【図12】信頼度の算出方法を説明するための説明図である。
【図13】所定時間における信頼度を加算して得た信頼度分布の一例である。
【図14】推定対象車両の絶対位置ylを説明するための説明図である。
【図15】推定対象車両の絶対位置の信頼度の分布の一例である。
【図16】図6のステップS34の周囲車両の車線位置の推定処理の処理手順の一例を示すフローチャートである。
【図17】第1の実施の形態の動作説明に供する説明図である。
【図18】第1の実施の形態の動作説明に供する説明図である。
【図19】第1の実施の形態の動作説明に供する説明図である。
【図20】第2の実施の形態における車両用走行支援装置の一例を示す構成図である。
【図21】第2の実施の形態における、図6のステップS31の自車両の車線位置の推定処理の処理手順の一例を示すフローチャートである。
【図22】第2の実施の形態における、図2のステップS7の走行支援処理の処理手順の一例を示すフローチャートである。
【図23】第3の実施の形態における、図2のステップS7の走行支援処理の処理手順の一例を示すフローチャートである。
【符号の説明】
【0116】
1 車速センサ
2 ナビゲーション装置
3 ヨーレートセンサ
4 ウインカ
5 車々間通信機
6 表示音声出力装置
7 前方検知カメラ
8 ステアリングアクチュエータ
10 コントローラ
100、100a 走行支援装置
【技術分野】
【0001】
本発明は、一の車両の、道路上における道路幅方向の位置を、他の車両との相対位置関係から推定するようにした、車両位置推定装置、車両用走行支援装置及び車両位置推定方法に関する。
【背景技術】
【0002】
従来、自車両の現在位置を検出する方法として、GPSにより車両の三次元的な現在位置の検出と、車速及び進行方向等の情報を組み合わせる自律航法とを併用する方法や、さらに、自車両の現在位置周辺の道路地図データの道路形状と実際に車両が走行した経路の形状とを比較して、形状が一致する度合が高い道路を走行していると判断するマップマッチングの手法等が提案されている。
【0003】
また、このような、GPSを用いた位置検出方法や、マップマッチングにより走行中の道路を判断する方法においては、その位置検出精度は、車両が、第何車線を走行しているかを識別するほど精度が高くないことから、例えば、カメラで撮像した前方画像を解析することによって、自車両が第何車線を走行しているかを判断するようにした方法等も提案されている(例えば、特許文献1参照)。
【特許文献1】特開平10−300494号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、上述のように、自車両の前方画像を解析することで車線位置を推定するようにした場合、広角なカメラを使った広い範囲の前方画像を得る必要がある。このため、例えば、カメラによる撮像画像を用いて制御を行うようにした公知の車線維持装置や、後方カメラの撮像画像を用いて駐車支援を行うようにした公知の駐車アシスト装置等が車両に搭載されていたとしても、これら車線維持装置や駐車アシスト装置のカメラを流用することができないため、車線位置検出用のカメラを新たに装備する必要があり、コストアップにつながっている。
【0005】
また、このように、車線位置検出用のカメラを用いて車線位置検出を行ったとしても、雨や、雪等といった、悪天候時には、車線位置検出の判断能力が低下するという問題がある。
そこで、この発明は、上記従来の未解決の問題に着目してなされたものであり、車線位置検出用のカメラを設けることなく、悪天候時であっても、的確に車線位置を検出することの可能な車両位置推定方法、車両用走行支援装置及び車両位置推定方法を提供することを目的としている。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本発明に係る車両位置推定装置は、一の車両が走行中の道路の、前記一の車両の走行車線と同一方向の車線である同一方向車線の車線数を検出し、また、前記同一方向車線上の他の車両の、一の車両に対する相対位置を検出する。そして、同一方向車線の車線数と、自車両と同一方向の車線上の他の車両の、前記一の車両に対する相対位置とに基づいて、一の車両の、前記道路上における道路幅方向の位置を推定する。
【発明の効果】
【0007】
本発明に係る車両位置推定装置によれば、一の車両の走行車線と同一方向の車線である同一方向車線の車線数と、同一方向車線上の他の車両の、一の車両に対する相対位置とに基づいて、一の車両の、道路上における道路幅方向の位置を推定するから、一の車両と同一方向の車線上の他の車両の、一の車両に対する相対位置情報を相対位置検出手段で検出することにより、前方カメラ等による撮像画像やレーダ等を用いることなく、一の車両の道路幅方向の位置を推定することができる。
【発明を実施するための最良の形態】
【0008】
以下、本発明の実施の形態を説明する。
まず、第1の実施の形態を説明する。
図1は、本発明を適用した走行支援装置100の一例を示す構成図である。
図1中、1は、自車両の走行速度を検出する車速センサ、2は、GPS等の自車位置検出手段を備え、予め保持している道路地図情報のうち、自車位置検出手段で検出した自車両周辺の道路地図情報を抽出し、自車両の現在位置、進行方向及びその周辺の道路地図情報を後述のコントローラ10に出力するナビゲーション装置である。
【0009】
また、車両には、車両に発生するヨーレートを検出するヨーレートセンサ3が搭載され、ナビゲーション装置2では、前記車速センサ1で検出した自車速と、ヨーレートセンサ3からのヨーレートとをもとに、デッドレコニングによる自車位置の推定が可能に構成されている。つまり、例えば、トンネル内を走行している場合等、GPS衛星からの情報を受信することができず、GPSで自車両の現在位置を推定することができないときには、デッドレコニングにより、自車両の現在位置を推定する。
【0010】
また、車両には、周囲に存在する周囲車両との間で車々間通信を行い、互いの走行情報を授受するための車々間通信機5が搭載されている。そして、コントローラ10は、車速センサ1からの自車速、ナビゲーション装置2からの自車両の現在位置、進行方向及び自車両周辺の道路地図情報、ウインカ4の操作状況及び、車々間通信機5から周囲車両の走行情報を獲得し、自車両の走行情報を前記車々間通信機5により周囲車両に報知すると共に、前記各種情報に基づき自車両の車線位置を推定して推奨する車線位置を演算し、演算結果を、表示音声出力装置6により運転者に報知する。なお、周囲車両も自車両と同様の機能構成を備えている。
【0011】
図2は、コントローラ10で実行される演算処理の処理手順の一例を示すフローチャートである。コントローラ10では、この演算処理を予め設定された所定周期で実行する。
まず、ステップS1で、各種センサ等の検出信号を読み込む。具体的には、車速センサ1からの自車速Vh、ナビゲーション装置2からの自車両の位置座標及び進行方向(x0,y0,dir0)を読み込む。
【0012】
また、車々間通信機5から周囲車両の走行情報を読み込む。前記走行情報は、例えば、周囲車両の位置座標、進行方向、走行速度、及び加減速度で構成される。そして、各車両からの走行情報をそれぞれ、自車両の現在位置を原点、自車両の進行方向を零とした座標上の情報に変換する。そして、n台の周囲車両から走行情報を受信したとすると、変換後の、各走行情報に識別番号“1〜n”を付与して管理する。すなわち、(x1,y1,dir1)、(x2,y2,dir2)、……、(xn,yn,dirn)として管理する。
【0013】
次いで、ステップS2に移行し、自車両が走行する道路の自車両の進行方向と同一方向の車線を同一方向車線としたとき、この同一方向車線の車線数Nlaneを、ナビゲーション装置2から獲得する。
そして、自車両が走行する道路上に、左又は右方向に分岐が存在する場合には、分岐位置よりも所定距離だけ手前の区間において、分岐のための車線相当数をNlaneに加算する。また、自車両が走行する道路上に、左又は右方向からの合流が存在する場合には、合流位置から所定距離先までの区間において、合流のための車線相当数をNlaneに加算する。
【0014】
例えば、図3に示すように、自車両が2車線道路を走行しており、自車両前方に合流が存在する場合には、合流地点から所定距離先までの区間では、ナビゲーション装置2から獲得した同一方向車線の線数Nlaneに、合流のための車線相当数“1”を加算し、これをNlaneとする。すなわち、Nlaneは“3”となる。
なお、分岐が存在する場合の所定距離は、前記分岐のために設けられている車線の距離相当の値に設定され、同様に、合流が存在する場合の所定距離は、前記合流のために設けられている車線の距離相当の値に設定される。
【0015】
次いで、ステップS3に移行し、自車両及び周囲車両がどの車線上に存在するかを推定すると共に、その信頼度及び自車両の右側及び左側に車線が存在する信頼度を算出する。具体的な処理については後述する。
次いで、ステップS4に移行し、自車両と周囲車両との相対位置関係と、前記ステップS3で推定した、自車両及び周囲車両がどの車線に存在しているかの情報とに基づき、周囲車両が、自車両に対してどの位置に存在するかを分類する。具体的には、自車両の車線と隣接する右車線上の右前方(FR)、自車両と同一車線上の前方(FC)、自車両の車線と隣接する左車線上の左前方(FL)、自車両の車線と隣接する右車線上の右後方(RR)、自車両と同一車線上の後方(RC)、自車両の車線と隣接する左車線上の左後方(RL)に分類する。例えば、自車両が第2車線、周囲車両がその右隣の第3車線に位置し、且つ、周囲車両が自車両よりも前方に存在する場合には、周囲車両は自車両に対して右前方(FR)に存在することになる。
【0016】
そして、自車両の右前方(FR)に存在する複数の周囲車両について、自車両と周囲車両との間の距離dFR(1)、……、dFR(mFR)を算出すると共に、前記周囲車両の速度をvFR(1)、……、vFR(mFR)として設定する。さらに、分岐、合流等により自車両の右前方の車線がなくなる場合には、dFR(mFR+1)及びvFR(mFR+1)を追加し、dFR(mFR+1)として、自車両の現在位置から、右前方の車線がなくなる位置までの距離を設定し、また、vFR(mFR+1)として“0”を設定する。なお、前記mFRは、自車両の右前方に存在する車両の台数である。
【0017】
同様に、自車両の前方(FC)に存在する複数の周囲車両について、自車両と周囲車両との間の距離dFC(1)、……、dFC(mFC)を算出すると共に、前記周囲車両の速度をvFC(1)、……、vFC(mFC)として設定する。さらに、分岐、合流等により自車両が走行中の車線が将来なくなる場合には、dFC(mFC+1)及びvFC(mFC+1)を追加し、dFC(mFC+1)として、自車両の現在位置から車線がなくなる位置までの距離を設定し、また、vFC(mFC+1)として“0”を設定する。なお、mFCは自車両の前方に存在する車両の台数である。
【0018】
また、自車両の左前方(FL)に存在する複数の周囲車両について、自車両と周囲車両との間の距離dFL(1)、……、dFL(mFL)を算出すると共に、前記周囲車両の速度をvFL(1)、……、vFL(mFL)として設定する。さらに、分岐、合流等により、自車両の左前方の車線がなくなる場合には、dFL(mFL+1)及びvFL(mFL+1)を追加し、dFL(mFL+1)として、自車両の現在位置から左前方の車線がなくなる位置までの距離を設定し、また、vFL(mFL+1)として“0”を設定する。なお、mFLは自車両の左前方に存在する車両の台数である。
【0019】
なお、前記自車両の現在位置から、右前方、前方、左前方の車線がなくなる位置までの距離は、例えば、ナビゲーション装置2の道路地図情報として、右前方、前方、左前方の車線がなくなる位置の位置情報を含めておき、この車線がなくなる位置の位置情報を、ナビゲーション装置2から獲得し、自車両の現在位置と車線がなくなる位置の位置情報とに基づいてこれら間の距離を算出すればよい。
【0020】
さらに、自車両の右後方(RR)に存在する先頭の周囲車両について、自車両と周囲車両との間の距離dRRを算出し、前記周囲車両の速度をvRRとして設定する。同様に、自車両と同一車線上の後方(RC)に存在する先頭の周囲車両について、自車両と周囲車両との間の距離dRCを算出し、前記周囲車両の速度をvRCとして設定する。さらに、自車両の左後方(RL)に存在する先頭の周囲車両について、自車両と周囲車両との間の距離dRLを算出し、前記周囲車両の速度をvRLとして設定する。
【0021】
次いで、ステップS5に移行し、自車両が現在の車線を維持した場合、右に車線変更した場合及び左に車線変更した場合のそれぞれについて、自車両に必要な加減速度を算出する。
具体的には、図4に示すように、まず、ステップS11で、自車両が現在の車線を維持した場合について、自車両が前方車両と所定距離を保って走行するために必要な加減速度を算出する。
【0022】
まず、自車両と同一車線上の前方に存在する複数の周囲車両のそれぞれに対する、自車両の加減速度aFC(nFC)(nFC=1〜mFC(自車両の走行車線がなくなる場合には、mFC+1))を、次式(1)にしたがって算出する。つまり、自車両が各周囲車両と、所定の車間時間相当の距離を保って走行するために必要な加減速度を算出する。
aFC(nFC)
=kd・〔dFC(nFC)−Th・vh〕+kv・〔vFC(nFC)−vh〕
……(1)
そして、このようにして算出した各周囲車両に対する加減速度aFC(nFC)のうち、最小値を選択し、これを、自車両が現在の走行車線を維持した場合に、前方の周囲車両と所定の距離を保って走行するために必要な加減速度aFCとする。なお、前記(1)式中の、kdは距離に対するゲイン、kvは相対速度に対するゲイン、Thは車間時間であって、これらは、予め実験等によって設定される。
【0023】
このようにして、自車両が現在の車線を維持した場合に必要な加減速度aFCを算出したならばステップS12に移行し、自車両の車線と隣接する右車線上の前方に存在する複数の周囲車両と自車両との関係から、自車両が右に車線変更した場合に、自車両がその前方車両と所定距離を保って走行するために必要な加減速度を算出する。
まず、自車両の車線と隣接する右車線上の前方に存在する複数の周囲車両それぞれに対する、自車両の加減速度aFR(nFR)(nFR=1〜mFR(自車両の車線と隣接する右車線がなくなる場合には、mFR+1))を、次式(2)にしたがって算出する。
aFR(nFR)
=kd・〔dFR(nFR)−Th・vh〕+kv・〔vFR(nFR)−vh〕
……(2)
【0024】
そして、このようにして算出した各周囲車両に対する加減速度aFR(nFR)のうち、最小値を選択し、これを、自車両が右に車線変更した場合に必要な自車両の加減速度aFRとする。なお、前記(2)式中の、kdは距離に対するゲイン、kvは相対速度に対するゲイン、Thは車間時間であって、これらは、予め実験等によって設定される。
【0025】
次いで、ステップS13に移行し、ステップS12の処理と同様の手順で、自車両の車線と隣接する左車線上の前方に存在する複数の周囲車両それぞれに対する、自車両の加減速度aFL(nFL)(nFL=1〜mFL(自車両の車線と隣接する左車線がなくなる場合には、mFL+1))を、次式(3)にしたがって算出する。
aFL(nFL)
=kd・〔dFL(nFL)−Th・vh〕+kv・〔vFL(nFL)−vh〕
……(3)
【0026】
そして、このようにして算出した各周囲車両に対する加減速度aFL(nFL)のうち、最小値を選択し、これを、自車両が左に車線変更した場合に、自車両が前方車両と所定距離を保って走行するために必要な加減速度aFLとする。なお、前記(3)式中の、kdは距離に対するゲイン、kvは相対速度に対するゲイン、Thは車間時間であって、これらは、予め実験等によって設定される。
【0027】
次いで、ステップS14に移行し、今度は、自車両の車線と隣接する右車線上の後方に存在する先頭の周囲車両と自車両との関係から、自車両が右に車線変更した場合に、右後方車両に接近されないために必要な自車両の加減速度aRRを、次式(4)から算出する。
aRR=kd・〔Th・vh−dRR〕+kv・〔vRR−vh〕 ……(4)
【0028】
そして、自車両が右に車線変更した場合に右後方車両に接近されないために必要な加減速度aRRが予め設定した加速度のしきい値よりも大きいか、又は前記ステップS3で推定した自車両の右側に車線が存在する信頼度が予め設定したそのしきい値よりも小さいとき、つまり、右側に車線がないか、右側に車線変更をすると右後方車両に接近されてしまう場合には、右側には車線変更できないと判断する。
【0029】
次いで、ステップS15に移行し、今度は、自車両の車線と隣接する左車線上の後方に存在する先頭の周囲車両と自車両との関係から、自車両が左に車線変更した場合に、左後方車両に接近されないために必要な自車両の加減速度aRLを、次式(5)から算出する。
aRL=kd・〔Th・vh−dRL〕+kv・〔vRL−vh〕 ……(5)
【0030】
そして、この自車両が左に車線変更した場合に左後方車両に接近されないために必要な加減速度aRLが予め設定した加速度のしきい値よりも大きいか、又は前記ステップS3で推定した自車両の左側に車線が存在する信頼度が予め設定したそのしきい値よりも小さいとき、つまり、左側に車線がないか、左側に車線変更をすると左後方車両に接近されてしまう場合には、左側には車線変更できないと判断する。
【0031】
このようにして、現在の車線を維持する場合、及び車線変更した場合について自車両で必要な加減速度を算出したならば、図2に戻って、ステップS6に移行し、ステップS5で算出した加減速度の演算結果に基づいて車線変更を行うかどうかを判断する。
具体的には、前記図4のステップS14及びステップS15の処理で、後方車両との関係から、右車線及び左車線の何れの方向にも車線変更を行うことは不可と判断されるときには、このまま現在の車線を維持すると判定する。
【0032】
一方、後方車両との関係から、左側への車線変更は可能であるが右側への車線変更は不可と判断されるときには、左に車線変更した場合に必要な加減速度aFLが、現在の車線を維持する場合に必要な加減速度aFCよりも大きいとき(aFL>aFC)、つまり、左に車線変更した方がより高速での走行が可能と判断されるときには、左に車線変更すると判断する。そして、aFL>aFCを満足しないとき、つまり、左に車線変更をしても現在よりも高速での走行はできないと予測されるときには、現在の車線を維持すると判断する。
【0033】
また、後方車両との関係から、左側への車線変更は不可であるが右側への車線変更は可能と判断されるときには、右に車線変更した場合に必要な加減速度aFRが、現在の車線を維持する場合に必要な加減速度aFCよりも大きいとき、つまり、右に車線変更した方がより高速での走行が可能と判断されるときには、右に車線変更すると判断する。そして、aFR>aFCを満足しないとき、つまり、右に車線変更をしても現在よりも高速での走行はできないと予測されるときには、現在の車線を維持すると判断する。
【0034】
また、後方車両との関係から、左側及び右側への車線変更が共に可能と判断されるときには、左に車線変更した場合に必要な加減速度aFL、右に車線変更した場合に必要な加減速度aFR、現在の車線を維持した場合に必要な加減速度aFCの3つの値を比較する。そして、左に車線変更した場合に必要な加減速度aFLが最大の場合には、左に車線変更すると判断し、右に車線変更した場合に必要な加減速度aFRが最大の場合には、右に車線変更すると判断し、これ以外の場合には現在の車線を維持すると判断する。つまり、左又は右に車線変更した方が、より高速での走行が可能と判断されるときには、左又は右に車線変更を行い、それ以外の場合には、現在の車線を維持する。
【0035】
次いで、ステップS7に移行し、ステップS6での車線変更の判断結果に基づき、走行支援を行う。
具体的には、図5に示すように、ステップS21で、ウインカ4の作動状況から、運転者が現在の車線を維持しているか、車線変更中であるかを判断する。
次いで、ステップS22に移行し、ウインカの作動状況から推測される、運転者が車線維持を行っているか、車線変更を行っているかといった運転者の操作状況と、前記ステップS6での車線変更の判断結果、つまり、車線を維持するか、右又は左に車線変更するかどうかの判断結果とが一致するかを判断する。
【0036】
そして、これらが一致しないときには、ステップS23に移行し、表示音声出力装置6を作動させ、車線変更の判断結果で特定される車線維持を行うか、左方向、又は、右方向に車線変更を行うように、運転者に報知する。
一方、ウインカ4の作動状況から推測される運転者の操作状況と、車線変更の判断結果とが一致するときには、ステップS24に移行し、表示音声出力装置6により車線変更或いは車線維持の報知を行っている場合にはこれを終了させる。
【0037】
次に、前記図2のステップS3の処理で実行される、自車両及び周囲車両の位置推定の処理手順を、図6を伴って説明する。
まず、ステップS31で、自車両の車線位置を推定する。具体的には、図7に示すフローチャートに基づいて推定する。
まず、ステップS41で、自車両の周囲車両の台数をカウントするためのカウンタkを“1”に初期化する。
【0038】
次いで、ステップS42に移行し、自車両及び周囲車両の位置情報に基づき、自車両からk番目に近い位置に存在する周囲車両が存在するかどうか、また、その周囲車両が自車両から所定距離以内に存在するかどうかを判断する。そして、このような周囲車両が存在しない場合には処理を終了する。なお、前記所定距離は、自車両の車線位置推定結果の精度を確保することの可能な距離相当の値に設定される。
【0039】
そして、ステップS42の処理で、自車両からk番目に近い位置に存在し、且つ自車両から所定距離以内に存在する周囲車両が存在する場合にはこの周囲車両を自車両の位置検出用車両とし、ステップS43に移行し、自車両と周囲車両kとの相対位置関係に基づき車線位置推定を行う。具体的には、図8に示す手順で推定する。
まず、車線位置の推定対象となる車両を推定対象車両iとし、この推定対象車両iの周辺に存在する車両を、推定対象車両iの位置検出用車両kとする。この場合、自車両の車線位置を推定するから、自車両が推定対象車両iとなり、k番目に自車両に近く且つ所定距離以内に存在する、k番目の周囲車両が、自車両の位置検出用車両すなわち、推定対象車両iの位置検出用車両kとなる。
【0040】
そして、ステップS43aで、現時点をt=0としたとき、予め設定した所定時間前から現時点t=0までの各時刻に、位置検出用車両kの位置情報で特定される位置に位置検出用車両kが存在したとする信頼度の分布rを求める。
まず、推定対象車両iに対する位置検出用車両kの相対位置情報を算出し、これを所定の履歴情報として所定の記憶領域に格納する。この記憶領域は所定時間分の相対位置情報を記憶可能に構成されている。そして、図9に示すように、推定対象車両iの位置を原点とする座標を考え、道路幅方向をy、前後方向をxとしたとき、推定対象車両iに対して道路幅方向に距離y(k)だけ離れた位置に、その位置検出用車両kが存在する場合の信頼度を、例えば、図10に示すように設定する。つまり、信頼度は、図10に示すように、推定対象車両iに対する道路幅方向の距離yを中心に分布しているとして設定し、また、その大きさは、推定対象車両iと、その位置検出用車両kとの間の距離が短いほど大きくなるように設定し、また、最新のデータであるほど大きくなるように設定する。
【0041】
そして、現時点t=0から、所定時間前の時点までの各時刻における、周囲車両kの道路幅方向の距離yの変化、つまり、推定対象車両iに対する周囲車両kの位置座標の変化に応じて、それぞれの信頼度を算出する。なお、現時点t=0から所定時間前の時点までの各時刻における推定対象車両iに対する周囲車両kの相対位置情報は、前記記憶領域に履歴情報として格納しておく。
【0042】
例えば、図11に示すように、推定対象車両iと同一車線上の後方に位置検出用車両kが存在する状態から、位置検出用車両kが、推定対象車両iの右側車線に車線変更し、位置検出用車両kが自車両の右前方を走行する状態となった場合には、所定時間前の時点を“−t3”とすると、t=−t3からt=0となるまでの間の各時刻において、位置検出用車両kがその位置に存在したとする信頼度は、図12に示すように、現時点t=0に近づくほど信頼度の分布が大きくなり、また、推定対象車両iに対する位置検出用車両kの道路幅方向の距離yが大きくなるほど信頼度の分布は大きくなる。
【0043】
次いで、ステップS43bに移行し、現時点t=0から所定時間前までの間の各時刻における信頼度を全て足し合わせる。例えば、図12の場合には、時刻“−t3、−t2、−t1、0、”の各時点における信頼度分布r(t=−t3)、r(t=−t2)、r(t=−t1)、r(t=0)を足し合わせ、図13に示す、所定期間における、位置検出用車両kの存在位置の信頼度分布ra(y)を獲得する。つまり、推定対象車両iの位置を原点とした場合の、推定対象車両iに対し、その位置検出用車両kが、現在どの位置に存在するかを表す信頼度分布を獲得する。
【0044】
次いで、ステップS43cに移行し、推定対象車両iが、各車線に存在する信頼度及び、推定対象車両iの右側及び左側に車線が存在する信頼度を算出する。
まず、図14に示すように、推定対象車両iが、道路の右端から車幅方向に距離ylだけ離れた絶対位置に存在すると仮定した場合、図13に示す、推定対象車両iに対する位置検出用車両kの相対位置の信頼度分布ra(y)を用いると、推定対象車両iの絶対位置の信頼度の分布は次式(6)で表すことができる。
【0045】
【数1】
【0046】
なお、(6)式中のWrは、車線幅である。この車線幅は、例えば、ナビゲーション装置2の道路地図情報として、予め車線幅情報を含めておき、道路地図情報として獲得するようにすればよい。
例えば、信頼度分布ra(y)が、図13に示すような分布となる場合、推定対象車両iの絶対位置の信頼度分布yb(yl)は、図15に示すような分布となる。なお、図15において、横軸はyl、縦軸は、推定対象車両iの絶対位置の信頼度分布yb(yl)である。
そして、前記(6)式から、推定対象車両iが、各車線1〜sに存在する信頼度R1(k)〜Rs(k)は、次式(7)で表すことができる。なお、車線数sは、ナビゲーション装置2の道路地図情報として予め設定しておき、ナビゲーション装置2から獲得すればよい。
【0047】
【数2】
【0048】
例えば、図15の場合には、位置検出用車両kの信頼度分布に基づく、推定対象車両iが第1車線にいる信頼度R1(k)は、ylが“0〜1Wr”の範囲となり、推定対象車両iが第2車線にいる信頼度R2(k)は、ylが“1Wr〜2Wr”の範囲となり推定対象車両iが第3車線にいる信頼度R3(k)は、ylが“2Wr〜3Wr”の範囲となる。図15から、推定対象車両iが第1車線及び第2車線にいる信頼度が大きいことから、推定対象車両iは、第1車線又は第2車線にいる可能性が高いと予測することができる。
そして、推定対象車両iの右側及び左側に車線が存在する信頼度は、次式(8)から算出する。
【0049】
【数3】
【0050】
例えば、図15の場合には、推定対象車両iの右側に車線が存在する信頼度は、“0〜2Wr”の範囲、推定対象車両iの左側に車線が存在する信頼度は、“1Wr〜3Wr”の範囲で表されることから、推定対象車両iの右側及び左側に車線が存在する信頼度共に比較的大きな値となり、推定対象車両iの右側及び左側に共に車線が存在する可能性が高いと推測される。
【0051】
このようにして、推定対象車両iの車線位置及び、その左右に車線が存在するかどうかの信頼度を算出したならば、図7に戻ってステップS44に移行する。
このステップS44では、カウンタkを“1”だけインクリントした後、ステップS45に移行し、カウンタkが予め設定したしきい値kαよりも大きくなったかどうかを判断する。このしきい値kαは、自車両の車線位置推定及び自車両の左側及び右側に車線が存在する信頼度の精度を確保することの可能な値に応じて設定される。
【0052】
そして、カウンタkがしきい値kα以下である場合にはステップS42に戻り、上記と同様にして、自車両にk番目に近い周囲車両であり、且つ自車両との距離が所定距離以内に存在する位置検出用車両kに基づいて、自車両の車線位置及び自車両の右側及び左側に車線が存在する信頼度を推定する。
そして、ステップS45の処理で、カウンタkがしきい値kαよりも大きくなったとき、ステップS46に移行し、各位置検出用車両に基づいて推定した信頼度に基づいて、各車線における自車両が存在する信頼度R1〜Rs(sは車線数)を、次式(9)から算出する。
【0053】
【数4】
【0054】
つまり、自車両が第1車線に存在する信頼度R1は、kα台の位置検出用車両に基づき、自車両の車線位置を推定した場合の第1車線に自車両が存在する信頼度の総和により算出されることになり、同様に、他の各車線に存在する信頼度は、kα台の位置検出用車両のそれぞれに基づき自車両の車線位置を推定した場合の各車線に自車両が存在する信頼度の総和により算出される。
このようにして、自車両が各車線に存在する信頼度R1〜Rsを算出したならば、ステップS47に移行し、自車両の右側及び左側に車線が存在する信頼度Rright及びRleftを次式(10)から算出する。
【0055】
【数5】
【0056】
つまり、自車両の右側及び左側に車線が存在する信頼度Rright及びRleft1は、kα台の周囲車両のそれぞれに基づき、自車両の右側及び左側に車線が存在するかどうかを推定した場合の信頼度の総和により算出されることになる。
このようにして、各車線における自車両が存在する信頼度(ステップS46)及び自車両の右側及び左側に車線が存在する信頼度(ステップS47)を算出したならば、図6に戻って、ステップS32に移行する。
【0057】
このステップS32では、処理する周囲車両、すなわちその車線位置を検出すべき周囲車両の台数をカウントするためのカウンタpを“1”に初期化する。次いでステップS33に移行し、自車両と周囲車両の位置座標に基づいて、自車両からp番目に近い位置に存在する周囲車両であり、自車両から所定距離以内に位置する周囲車両が存在するかどうかを判断し、これらを満足する周囲車両が存在しない場合にはそのまま処理を終了するが、該当する周囲車両が存在する場合にはステップS34に移行する。つまり、自車両からの距離が比較的遠く、自車両が車線変更を行うにあたってその周囲車両の動向を考慮する必要のない周囲車両については、その車線位置の検出は行わない。
【0058】
前記ステップS34では、自車両にp番目に近い位置に存在する周囲車両の車線位置の推定を行う。この処理は、図16に示すように、まず、ステップS51で車々間通信機5により、自車両にp番目に近い位置に存在する周囲車両の走行情報を獲得し、その中に、この周囲車両の車線位置を表す車線位置情報が含まれていればこれを抽出する。
次いで、ステップS52に移行し、処理する周囲車両の台数、つまり、前記p番目の周囲車両の車線位置の推定を行うにあたって必要な周囲車両すなわち位置検出用車両の台数をカウントするためのカウンタkを“1”に初期化する。
【0059】
次いで、ステップS53に移行し、p番目の周囲車両に対し、k番目に近い位置に存在する周囲車両であり、且つp番目の周囲車両との間の距離が所定距離以内に存在する周囲車両が存在するかどうかを判断し、該当する周囲車両がない場合にはそのまま処理を終了するが、該当する周囲車両が存在する場合にはこの周囲車両を位置検出用車両とし、ステップS54に移行し、p番目の周囲車両とその位置検出用車両である周囲車両kとの相対位置関係に基づき、p番目の周囲車両の道路上の位置、すなわち車線位置を推定する。
【0060】
この推定は、前記図8の処理と同様の手順で行う。この場合、車線位置の推定対象となる車両は、p番目の周囲車両であるから、推定対象車両iをp番目の周囲車両とし、このp番目の周囲車両と、このp番目の周囲車両との間の距離が所定距離以内に存在する周囲車両に基づいて、p番目の周囲車両の車線位置及び自車両の左右に車線が存在するかどうかの信頼度を算出する。
【0061】
次いで、ステップS55に移行し、カウンタkをインクリメントし、カウンタkがそのしきい値kβ以下であるときには、ステップS53に戻る。そして、推定対象車両iであるp番目の周囲車両にk番目に近い位置に存在し、且つp番目の周囲車両から所定距離以内に存在する周囲車両に基づき、p番目の周囲車両の車線位置を推定し、同様の手順でカウンタkを順次更新して推定対象車両iであるp番目の周囲車両の車線位置を推定し、カウンタ値kがしきい値kβより大きくなったとき、ステップS57に移行する。なお、前記しきい値kβは、p番目の周囲車両の車線位置推定及びp番目の周囲車両の左側及び右側に車線が存在する信頼度の精度を確保することの可能な値に応じて設定される。
【0062】
前記ステップS57では、p番目の周囲車両が存在する信頼度を車線毎に算出する。この信頼度の算出は、前記図7のステップS46の処理と同様の手順で算出するが、ステップS51の処理で、p番目の周囲車両からその車線位置情報を受信している場合には、この車線位置情報で特定される車線位置の信頼度も、各車線位置における信頼度の総和に加算する。前記車線位置情報で特定される車線位置の信頼度は、予め設定した固定値を加算してもよく、また、p番目の周囲車両からその車線位置情報の信頼度を設定して車線位置情報と共に送信するようにしてもよい。この場合、例えば、p番目の周囲車両で車線位置を、例えば前方カメラの撮像画像に基づいて検出している場合等には、天候等に応じて信頼度を設定すれば、より的確な信頼度を設定することができる。
【0063】
次いで、ステップS58に移行し、前記図7のステップS47の処理と同様の手順でp番目の周囲車両の右側及び左側の車線に周囲車両が存在するかどうかの信頼度を算出する。
このようにして、p番目の周囲車両について、その車線位置及びp番目の周囲車両の右側及び左側に車線が存在する信頼度を算出したならば、図6に戻ってステップS35に移行し、カウンタpをインクリメントした後、ステップS36に移行する。そして、カウンタpが予め設定したそのしきい値pα以下であるときにはステップS33に戻って、自車両に、次に近い位置に存在し且つ自車両からの距離が所定距離以内の位置に存在する周囲車両pについて、同様の手順でその車線位置の推定を行う。
【0064】
そして、カウンタpがそのしきい値pαよりも大きくなったとき、自車両及びその周囲車両の車線位置の信頼度の算出及び、右側及び左側に車線が存在する信頼度の算出を終了する。
つまり、図2のステップS3の処理では、自車両の周辺に位置する周囲車両を自車両の位置検出用車両とし、これらに位置検出用車両に基づいて自車両の車線位置を推定すると共に、自車両の周囲車両の車線位置を、この周囲車両の周辺に位置する他の車両をその位置検出用車両としてこれに基づいて、推定している。
なお、前記カウンタpのしきい値pαは、自車両が車線変更を行うに際し、その動向を考慮すべき周囲車両の台数に応じて設定される。
【0065】
次に、上記第1の実施の形態の動作を説明する。
車々間通信機5では所定周期で車々間通信を行い、自車両の周辺に存在する周囲車両からその走行情報を獲得すると共に、自車両の走行情報を送信する。
コントローラ10では、各種センサからの情報や車々間通信により獲得した周囲車両の走行情報を読み込み(図2のステップS1)、また、ナビゲーション装置2から自車両の現在位置周辺の道路地図情報を獲得し、自車両の現在走行中の走行路及びその前方の走行車線の車線数情報を獲得し(ステップS2)、自車両及び周囲車両の車線位置を推定する(ステップS3)。
【0066】
例えば、図17に示すように、自車両Mの周囲に、周囲車両k1〜k7が存在するものとすると、周囲車両k1〜k7のうち、自車両Mからの距離が所定距離以内であるもののうち、自車両に最も近い位置に存在する車両から順に、しきい値kαで特定される台数の周囲車両が、自車両の位置検出用車両となり、これらに基づいて、自車両Mの各車線位置における信頼度が算出される。
【0067】
図17において、前記周囲車両k1〜k3と自車両Mとの間の距離は所定距離以内であるが、周囲車両k4〜k7と自車両Mとの間の距離は所定距離よりも大きいものとし、さらに、しきい値kαは“3”とすると、自車両Mとの間の距離が所定距離以内である周囲車両k1〜k3のうち、自車両に最も近いものから順に、周囲車両k1、k2及びk3の3台の周囲車両が、自車両の位置検出用車両となり、これら位置検出用車両として周囲車両k1〜k3の、自車両Mに対する相対位置関係に基づいて自車両Mの車線位置の信頼度が算出される。
【0068】
例えば、周囲車両k1は、自車両Mと同一車線上の前方を継続して走行し、周囲車両k2は、前記図11に示すように、自車両Mの後方から自車両Mに隣接する右側車線に車線変更し自車両前方を走行する状態となり、周囲車両k3は自車両Mと隣接する左側車線後方を継続して走行している場合には、自車両Mの現在位置を原点とおいた場合の周囲車両k1の相対位置の信頼度分布rak1(y)、周囲車両k2の相対位置の信頼度分布rak2(y)、周囲車両k3の相対位置の信頼度分布rak3(y)は、それぞれ図18(a)の概念図に示すような分布となる。
【0069】
このため、図18(b)の概念図に示すように、周囲車両k1の相対位置の信頼度分布rak1(y)に基づく自車両Mの絶対位置の信頼度の分布ybk1(yl)は、第2車線で比較的大きな信頼度分布となり、周囲車両k2の相対位置の信頼度分布rak2(y)に基づく自車両Mの絶対位置の信頼度の分布ybk2(yl)は、第1車線及び第2車線で比較的大きな信頼度分布となり、周囲車両k3の相対位置の信頼度分布rak3(y)に基づく自車両Mの絶対位置の信頼度の分布ybk3(yl)は、第2車線及び第3車線で比較的大きな信頼度分布となる。なお、図18(b)は、各信頼度の分布が最大となるときを“1”として記載している。
【0070】
したがって、これら信頼度の総和は、第2車線で最も高くなることから、自車両Mは第2車線に存在すると推測されることになる。さらに、図18(b)の、信頼度分布ybk1(yl)〜ybk3(yl)において、ylが“0〜(s−1)Wr”となる領域、つまり、“0〜2Wr”の領域の信頼度分布の総和が、自車両Mの右側に車線がある信頼度Rrightとして算出され、ylが“1Wr〜s・Wr”となる領域、つまり、“1Wr〜3Wr”の領域の信頼度分布の総和が、自車両Mの左側に車線がある信頼度Rleftとして算出される。図18(b)に示すように、ylが“0〜2Wr”の領域の信頼度分布の総和及び“1Wr〜s・Wr”となる領域の信頼度分布の総和は、共に比較的大きな値となることから、自車両Mの右及び左に車線が存在する信頼度は比較的大きな値となり、自車両Mの右及び左側に車線が存在する可能性が高いと推測されることになる。
【0071】
次に、周囲車両k1の車線位置を推定する場合には、周囲車両k1との間の距離が所定距離以内となる車両は、周囲車両k2、k3及び自車両Mであるから、これら周囲車両k2、k3及び自車両Mが、周囲車両k1の位置検出用車両となり、周囲車両k1の現在位置を原点とおいた場合の周囲車両k2、k3及び自車両Mの相対位置の信頼度分布を算出し、さらに周囲車両k1の絶対位置の信頼度の分布を算出する。そして、周囲車両k2、k3及び自車両Mの相対位置の信頼度分布のそれぞれに基づいて算出した、周囲車両k1の絶対位置の信頼度の分布の総和を算出し、その信頼度が高い車線に、周囲車両k1が存在する可能性が高いと推測すると共に、周囲車両k1の信頼度の分布に基づいて周囲車両k1の右側及び左側に車線がある信頼度を同様の手順で算出する。
【0072】
この場合、周囲車両k1は、自車両Mと同じ車線上に位置し、周囲車両k2、k3、自車両Mの相対位置の信頼度分布は、図18(a)の概念図と同様に、周囲車両k1を基準として左右及び中央に現れることから、周囲車両k1の絶対位置の信頼度の分布は、図18(b)の概念図と同様に各車線位置に、各車両に基づく信頼度分布のピークが現れる波形となる。よって、この場合も第2車線における信頼度分布の総和が最も大きくなり、周囲車両k1は第2車線に存在すると予測される。
【0073】
また、例えば、周囲車両k2の車線位置を検出する場合には、周囲車両k1、k3及び自車両Mが、周囲車両k2の位置検出用車両となる。そして、この場合、位置検出用車両は、周囲車両k2の左側に存在することから、各車両の周囲車両k2に対する信頼度分布は、図19(a)の概念図に示すように、周囲車両k1を基準として、yが負である領域での分布となり、各車両に基づく周囲車両k2の絶対位置の信頼度の分布は、図19(b)の概念図に示すように、第3車線位置で最も大きくなる。なお、図19(b)では、各信頼度分布における最大値を“1”として表している。
【0074】
したがって、周囲車両k2は、第3車線にいる可能性が高いと予測される。また、図19(b)に示すように、ylが“0〜2Wr”の領域の信頼度分布の総和は比較的小さいが、“1Wr〜3・Wr”となる領域の信頼度分布の総和は比較的大きいことから、周囲車両k2の右側に車両が存在する可能性は低いが、左側に存在する可能性は高いと推測されることになる。
同様に、周囲車両k3についても、同様の手順で、車線位置を推測すると共に、左側及び右側に車線がある信頼度を算出する。
【0075】
次に、周囲車両k4の車線位置を推測する場合には、周囲車両k4との間の距離が所定距離以内となる周囲車両はk5〜k7であることから、周囲車両k5〜k7のうち、周囲車両k4に近い車両から順に、周囲車両k5、k6、k7の3台の周囲車両が周囲車両k4の位置検出用車両となり、これら位置検出用車両と周囲車両k4との相対位置関係に基づいて、周囲車両k4の車線位置の信頼度分布が算出され、車線位置が推測される。同様に、周囲車両k5〜k7についても、周囲車両k4〜k7の中の各車両間での相対位置関係に基づいて車線位置の信頼度分布が算出され車線位置が推測される。
【0076】
このとき、自車両Mからの距離が所定距離以内である周囲車両、つまり、自車両Mの位置検出用車両の台数がそのしきい値kαよりも少ない場合には、自車両Mの車線位置の信頼度の算出は行わない。したがって、自車両Mの車線位置の信頼度を算出する際に、周囲車両の台数が少ない場合には、算出される信頼度の精度を確保することが困難な場合があるが、信頼度の算出にあたって、その精度を確保することの可能な台数の周囲車両が存在しない場合には、自車両Mの信頼度分布の算出は行わず、すなわち車線位置の推測は行わないから、精度の低い信頼度分布に基づいて、車線位置の推測が行われることを回避することができる。
【0077】
また、同様に、周囲車両k1〜k7の車線位置を推定する場合にも、これら周囲車両k1〜k7からの距離が所定距離以内である周囲車両及び自車両Mを、位置検出用車両としてこれらの位置情報に基づいて信頼度の算出を行い、且つ位置検出用車両の台数がしきい値kαよりも少ない場合には、周囲車両k1〜k7の車線位置の推定は行わないから、精度の低い信頼度分布に基づいて、車線位置の推測が行われることを回避することができる。
【0078】
また、自車両Mは各周囲車両の位置座標情報を、車々間通信により獲得することができ、これら自車両前方の周囲車両が存在する付近の車線数の情報は道路地図情報から獲得することができるから、例えば前記周囲車両k4〜k7を、自車両の運転者が直接目視することができない場合であってもその車線位置を検出することができる。
このようにして、自車両M及び周囲車両k1〜k7の車線位置の推定が行われたならば、各周囲車両k1〜k7の位置情報及び推測した車線位置に基づいて、各周囲車両k1〜k7が自車両Mに対してどの位置に存在するかが分類される(図2のステップS4)。図17の場合、自車両Mの右前方(FR)の車両として、周囲車両k6、k2、前方(FC)の車両として周囲車両k4、k5及びk1、左前方(FL)の車両として周囲車両k7として分類される。また、自車両の左車線後方には、周囲車両k3しか存在しないから、この周囲車両k3が左後方(RL)の車両として分類される。
【0079】
そして、自車両Mが現在の車線位置を維持すると仮定した場合、自車両Mが右又は左側に車線変更する仮定した場合について、自車両Mがその前方に位置する車両との間で所定距離を保って走行するために必要な加減速度が算出される(ステップS5)。
図17に示すように、自車両Mの同一車線上前方には、周囲車両k4、k5及びk1が存在するから、これら各周囲車両に対する自車両Mの加減速度のうち最小値が、自車両Mが車線を維持する場合に必要な加減速度aFCとして設定される。同様に、自車両Mの右側車線上前方には、周囲車両k6及びk2が存在するからこれら各周囲車両に対する自車両Mの加減速度のうち最小値が、自車両Mが右に車線変更した場合に必要な加減速度aFRとして設定され、同様に、自車両Mの左側車線前方に存在する周囲車両k7に対する自車両Mの加減速度が、自車両Mが左に車線変更した場合に必要な加減速度として設定される。さらに、自車両の左後方に存在する周囲車両k3に対する自車両Mの加減速度が、自車両Mが左側に車線変更した場合に必要な加減速度aRLとして設定される。また、図17に示すように、自車両Mの右側後方には周囲車両が存在しないから、自車両Mが右側に車線変更した場合に必要な加減速度aRRは零として設定される。
【0080】
そして、自車両Mの左側に車線がある信頼度Rleftが、予め設定されたしきい値よりも小さく、自車両Mの左側に車線がないか、或いは、自車両Mが左側に車線変更した場合に必要な加減速度aRLがしきい値よりも大きく、左側に車線変更すると後方車両この場合周囲車両k3に接近されると予測されるときには左側への車線変更は不可と判断される。また、この場合、自車両の右後方には周囲車両は存在しないから、自車両Mの右側に車線が存在する信頼度Rrightが予め設定されたしきい値よりも小さく右側に車線がないと判断されるとき、右側への車線変更は不可と判断し、それ以外のときには、車線変更は可能と判断する。
【0081】
そして、現在の車線を維持した場合、右又は左に車線変更した場合の加減速度及び右及び左への車線変更の可不可に基づいて、車線変更を行うか行わないかが判断され、自車両Mが最も高速で走行可能な車線が特定され(ステップS6)、運転者の車線変更の意志の有無や車線変更の方向と、特定結果とが一致しないとき、これが報知される(ステップS7)。
【0082】
また、例えば、図3に示すように、自車両の左側の車線に合流のための車線がある場合には、自車両の左側に車線があるとして車線数を“1”加算し、さらに、追加された車線について、速度が零の車両が存在するとして、左に車線変更した場合に必要な加減速度を算出するが、左車線を走行する車両は速度零であることから、自車両で必要な加減速度は負の比較的大きな値となり、これが左に車線変更した場合に必要な加減速度として選択されることになり、現在の車線を維持する場合に必要な加減速度よりも小さな値となることから、左に車線変更するとの判断は行われない。したがって、図3に示すように自車両の左側に合流のための車線がある場合に、この車線上に周囲車両が存在する場合であっても、合流のための車線が車線変更先の車線として選択されることはなく、的確に車線変更の判断を行うことができる。
【0083】
したがって、上述のように、自車両及び各周囲車両の車線位置を的確に判別することができるから、各車両について特定した車線位置と、車々間通信により獲得した各周囲車両の位置情報や車速等とに基づき、自車両が車線変更をすべきか現在の走行車線を維持するべきかを的確に判断することができる。また、このとき、前述のように、自車両の運転者からは目視できない周囲車両についてもその車線位置や走行情報を自車両Mで把握することができるから、この運転者から目視困難な周囲車両をも考慮して、車線を推奨することができる。したがって、例えば、車線変更先の車線に、自車両の運転者からは目視できない低速走行している周囲車両が存在する場合等には、車線変更した後に、再度もとの車線に戻る等といった無駄な行動を行わざるを得ない場合があるが、車線変更を行う前に、この低速走行している周囲車両を考慮して車線変更を行うことができるから、無駄な車線変更を行う等といった不要な運転行動を行うことを回避することができる。
【0084】
また、上述のように、自車両M及び周囲車両k1〜k7の車線位置は、車線位置の推定対象の車両とその周囲に位置する周囲車両との相対位置関係に基づいて推定しているから、車線位置を検出するため自車両の前方画像を撮像するための広角カメラ等、専用のカメラを設けることなく実現することができ、その分、コストの削減を図ることができる。また、広角カメラ等を用いて車線検出を行う場合、雨や雪等、悪天候時には、車線位置の検出精度が低下する場合がある。しかしながら、上述のように、車線位置の推定は、各車両間の相対位置関係に基づいて推定しているから、確実に車々間通信を行うことの可能な環境下であれば、車線位置検出を高精度に行うことができ、天候等の影響を受けることを回避することができるから、より多くの場面において、走行支援を行うことができる。
【0085】
また、車線位置を推定する際には、図10に示すように、位置検出対象車両iが存在する信頼度を設定し、推定対象車両iと位置検出用対象車両kとの間の距離が短いほど信頼度が大きくなり、且つ、最新のデータであるほど信頼度が大きくなるように設定し、さらに、現時点t=0から、所定時間前の時点までの各時刻における、位置検出用車両kの道路幅方向の距離yの変化に応じて、それぞれの信頼度を算出して推定対象車両iに対する位置検出用車両kの存在位置の信頼度分布ra(y)を獲得し、これに基づいて車線位置の推定を行っているから、推定対象車両iに対する位置検出用車両kの存在位置の精度を考慮して車線位置の推定を行うことができる。また、推定対象車両iと位置検出用車両kとの間の距離が長いときや、位置情報が古い場合には、位置検出用車両kの存在位置情報の信頼度は低くなるが、これを考慮して車線位置推定を行っているから、存在位置情報の精度を考慮して的確に車線位置推定を行うことができる。
【0086】
また、推定対象車両iに対する位置検出用車両kの存在位置情報として、図11に示すように、現時点t=0から所定時間前の時点までの各時刻における、位置検出用車両kの存在位置情報を獲得するようにしているから、例えば現時点で推定対象車両iの周辺に位置検出用車両kとなり得る車両が存在しない場合であっても、所定時間前の時点までの各時刻における位置検出用車両kの存在位置情報に基づいて車線位置推定を行うことができる。また、このように、所定時間の間における複数の存在位置情報に基づいて車線位置を推定しているから、より高精度な車線位置の推定結果を得ることができる。
【0087】
また、車線位置の推定は、推定対象車両の周囲の1台の位置検出用車両だけでなく、複数の周囲車両位置検出用車両との相対位置関係に基づいて推定しているからより高精度に位置推定を行うことができる。
また、車線位置の推定は、自車両がいる道路と自車両との位置関係の信頼度に基づいて推定し、その信頼度に基づいて自車両の車線位置を推定しているから、容易且つ的確に車線位置を推定することができる。
【0088】
また、車線変更を行うかどうかの判断を行う際には、合流や分岐のための車線も考慮して判断するようにしているから、合流や分岐のための車線上に存在する周囲車両の動向をも考慮して車線変更を行うべきかどうかの判断を行うことができる。
なお、上記第1の実施の形態では、各車線における信頼度が最も高い車線に、推定対象車両が存在すると判断する場合について説明したが、例えば、最も信頼度の高い車線の信頼度が、予め設定した基準値を下回る場合、すなわちある程度の信頼度を確保することができない場合には、車線位置推定不可と判断し、車線変更の推奨は行わないようにしてもよく、このようにすることによって、信頼度の低い推奨車線に基づいて車線変更を行うことを回避することができる。
【0089】
次に、本発明の第2の実施の形態を説明する。
図20は、第2の実施の形態における走行支援装置100aの一例を示す構成図であって、前記図1に示す第1の実施の形態における走行支援装置100において、さらに、自車両前方の道路を撮像し、その撮像映像から自車両の道路端からの距離を検出するための前方検知カメラ7及び、自車両の運転者の操舵操作に関わらず操舵を行うためのステアリングアクチュエータ8が追加されている。前記前方検知カメラ7の撮像画像はコントローラ10に入力され、また、ステアリングアクチュエータ8は、コントローラ10によって制御される。
【0090】
第2の実施の形態におけるコントローラ10の処理手順は、図2に示す第1の実施の形態におけるコントローラ10の処理手順において一部異なること以外は同様であるので同一部の詳細な説明は省略する。
この第2の実施の形態においては、前記図2のフローチャートに示すように、各種センサや車々間通信機5等から各種情報を読み込み(ステップS1)、ナビゲーション装置2から車線情報を読み込んだ後、ステップS3に移行し、自車両及びその周囲車両の車線位置の推定を行う。このとき、周囲車両の車線位置の推定は、上記第1の実施の形態と同様の手順で行うが、自車両Mの車線位置の推定は、図21のフローチャートに示す処理手順にしたがって算出する。
【0091】
つまり、まず、ステップS40で、前方検知カメラ7の撮像情報に基づいて、車線位置の推定を行い、走行中の道路の車線数に基づいて、自車両の車線位置を推定する。この車線位置の推定は、公知の手順で行えばよく、画像処理を行って道路端からの自車両の車幅方向の距離を検出し、これと、車線幅情報及び走行路の車線数情報等に基づいて自車両がどの車線に存在するかを判断する。
【0092】
なお、ここでは、前方検知カメラ7を用い、その撮像画像に基づいて自車両の車線位置を推定する場合について説明したが、例えば、後方道路を撮像する後方検知カメラを用い、この後方検知カメラの撮像画像に基づいて、道路端から自車両の車幅方向の距離を検出してもよい。また、カメラ等の撮像手段に限らず、例えば、レーダ等の距離計測手段を車両側方に設け、この距離計測手段の検出情報に基づいて道路端からの自車両の車幅方向の距離を検出しこれに基づいて車線位置を推定してもよく、要は、車線位置を推測することの可能な車線位置推測手段であれば適用することができる。
【0093】
そして、カメラ等の撮像手段による撮像画像や、レーダ等の距離計測手段による計測結果等に基づいて自車両の車線位置を推定したならば、推定した車線位置の信頼度を設定する。この信頼度は、走行中の道路の車線数に基づいて車線毎にその車線に自車両が存在する信頼度を設定する。前述のように、カメラやレーダ等を用いた車線位置推定においては、雨天時等天候によってその推定精度が異なるため、天候等、車線位置の推定に影響を及ぼす諸元に応じて信頼度を設定し、例えば雨天時の信頼度は、晴天時に比較して小さくなるように設定する。
【0094】
次いで、ステップS41に移行し、以後、ステップS45の処理まで、上記第1の実施の形態と同様の手順で処理を行い、自車両Mに対する周囲車両の相対位置関係に基づいて自車両Mの車線位置を推定する。そして所定数kαの位置検出用車両に基づいて車線位置を推定したならば、ステップS45からステップS46aに移行し、各位置検出用車両に基づいて推定した自車両の車線位置を総合して、自車両がどの車線位置に存在するかを推測する。
【0095】
このとき、第1車線に自車両が存在する信頼度R1(k)は、各位置検出用車両に基づいて算出した第1車線における信頼度R1(1)〜R1(n)の総和に、さらに、前記ステップS40で設定した、周囲センサとしての前方検知カメラ7の撮像画像から検出した自車両の第1車線における信頼度も加算し、これを第1車線における信頼度R1とする。同様に他の車線に自車両が存在する信頼度についても、各位置検出用車両に基づいて算出した信頼度の総和に、さらに、ステップS40で設定した前方検知カメラ7の撮像画像から検出した自車両の各車線における信頼度も加算する。
【0096】
次いで、ステップS47に移行し、上記第1の実施の形態と同様に自車両Mの右側及び左側に車線がある信頼度を算出し処理を終了する。
つまり、この第2の実施の形態においては、自車両の車線位置を推定する際に、位置検出用車両との相対位置関係だけでなく、前方検知カメラ7の撮像画像から検出した自車両の各車線における信頼度も考慮して、総合的に自車両の車線位置を判断している。したがって、位置検出用車両との間の相対位置関係だけでなく、前方検知カメラ7の撮像画像に基づき検出した車線位置も考慮して総合的に、自車両に車線位置を推定することによってより的確且つ高精度に車線位置の推定を行うことができる。
【0097】
また、前方検知カメラ7の撮像画像に基づき検出した車線位置の信頼度を設定する際に、天候等その検出精度に影響を要因を考慮して信頼度を設定することによって、より的確に車線位置を推定することができる。
そして、このようにして推定した自車両及び周囲車両の車線位置に基づいて、図2のステップS4〜ステップS6の処理を上記第1の実施の形態と同様に実行して自車両Mが現在の車線を維持するべきか、右又は左に車線変更するべきかを判断し、その判断結果に応じてステップS7で走行支援を行う。
【0098】
この第2の実施の形態では、図22のフローチャートにしたがって走行支援処理を行い、推奨される車線と自車両の車線位置とに基づいて推奨される車線への車線変更及び車線維持のためのステアリング制御を行う。
まず、ステップS61で、自車両が、現在の車線を維持して走行する際の、自車両の走行位置の目標地点yh*を設定する。この走行位置の目標地点yh*は、公知の手順で設定すればよく、例えば、道路左端を基準として、現在走行中の車線の車線幅方向中央を目標地点yh*として設定し、例えば運転者の操舵操作により車線変更した場合には車線変更後の車線における車線幅方向中央を新たに目標地点yh*として設定する。
【0099】
次いで、ステップS62に移行し、前記図2のステップS6で右又は左に車線変更を行うよう判断されたかどうかを判断し、車線変更を行うと判断された場合には、ステップS63に移行しステップS61で設定した目標地点yh*の更新を行う。すなわち、右に車線変更をするよう判断された場合には、前記ステップS61で設定された目標地点yh*に、走行路の車線幅Wrを加算した値を新たに目標地点yh*(=yh*+Wr)とする。つまり、現在の目標地点yh*として、例えば現在走行中の車線の幅方向中央地点が設定されている状態から、右側車線の幅方向中央地点が目標地点yh*として設定される。一方、左に車線変更するよう判断された場合には、現在の目標地点yh*から車線幅Wrを減算した値を新たにyh*(=yh*−Wr)とし、現在の目標地点yh*として例えば現在走行中の車線の幅方向中央地点が設定されている状態から、左側車線の幅方向中央地点が目標地点yh*として設定される。そして、表示音声出力装置6を作動し、車線変更を行う旨の報知を運転者に対して行った後、ステップS65に移行する。
【0100】
一方、ステップS62で、車線を維持するよう判断された場合には、ステップS64に移行し、前記ステップS61で設定された目標地点yh*の変更は行わず、運転者が車線変更を行おうとしている場合に、表示音声出力装置6を作動し、現在の車線を維持するよう報知を行う。そして、ステップS65に移行する。
【0101】
このステップS65では、前方検知カメラ7の撮像画像に基づき、道路端からの自車両の道路幅方向の距離、すなわち、自車両の現在位置を獲得し、次いで、ステップS66に移行し、ステップS65で検出した自車両の道路上における現在位置と目標地点yh*との偏差を算出し、この偏差が零となるように、ステアリングアクチュエータ8を制御する。例えば、前記偏差を零とするために必要な操舵角変化を実現し得る操舵トルクをステアリングシャフトに付与すること等により、操舵を行う。これによって、前記偏差が零となるように操舵されることによって、車線中央を走行するように操舵制御が行われると共に、右又は左に車線変更を行う場合には、自動的に操舵が行われることになって、自車両は、自動的に右又は左に車線変更が行われることになる。また運転者が操舵操作を行った場合には、操舵操作の妨げとならないように、操舵トルクを抑制したり、制御を中止したりする等といった対処を行う。
【0102】
このように、ステアリングアクチュエータ8による目標地点yh*を、車線変更をするか否かの判断に応じて変更することによって、推奨される車線への車線変更を自動的に行うことができる。
また、車線変更をするか否かの判断は、自車両が右又は左に車線変更したと仮定した場合の、自車両に発生する加減速度を考慮して行っているから、自動的に車線変更が行われた場合であっても、車線変更先の先行する周囲車両や後続する周囲車両との間の車間距離が短くなり過ぎるといった状況になることを回避することができ、自動操舵による車線変更を安全に行うことができる。
【0103】
なお、上記第1の実施の形態においても上記第2の実施の形態と同様の手順で、推奨される車線位置に応じて自動的に車線変更を行うことも可能であることはいうまでもない。
また、周囲車両で、その車線位置を上述のような手順で推定しているとき、或いは前方検知カメラを備え、その車線位置を検出している場合等には、車々間通信により周囲車両の車線位置及びその信頼度情報を獲得し、これを考慮して、上記第2の実施の形態と同様の手順で周囲車両の車線位置を推定するようにしてもよい。
【0104】
次に、本発明の第3の実施の形態を説明する。
この第3の実施の形態は、上記第2の実施の形態において、図2のステップS7で実行される走行支援処理の処理手順が異なること以外は同様であるので同一部の詳細な説明は省略する。
この第3の実施の形態では、図23に示す走行支援処理を行う。つまり、ステップS71で、前記第2の実施の形態における図22のステップS61の処理と同様の手順で、自車両が、現在の車線を維持して走行する際の、自車両の走行位置の目標地点yh*を設定する。次いで、ステップS72に移行し、前記図2のステップS6の処理で、車線変更をするよう判断されたかどうか及び自車両Mの右及び左に車線のある信頼度の大きさに応じて支援内容を決定する。
【0105】
具体的には、右に車線変更を行うよう判断されたときには、自車両Mの右に車線のある信頼度が予め設定した第1のしきい値よりも小さく、自車両Mの右に車線のある可能性が低いと予測されるときには、現在の車線を維持すると判断する。また、右に車線のある信頼度が前記第1のしきい値以上であり且つ第1のしきい値よりも大きい第2のしきい値よりも小さいときには、前記表示音声出力装置6を作動し、表示によって、運転者に対して右に車線変更する旨の報知を行うと判断する。
【0106】
また、右に車線のある信頼度が前記第2のしきい値以上であり且つこの第2のしきい値よりも大きな第3のしきい値よりも小さいときには、前記表示音声出力装置6を作動し、表示及び音声によって運転者に対して右に車線変更する旨の報知を行うと判断する。
また、右に車線のある信頼度が前記第3のしきい値以上であり且つこの第3のしきい値よりも大きな第4のしきい値よりも小さいときには、予め設定した第1の車線変更パターンで右に車線変更すると判断する。さらに、右に車線のある信頼度が前記第4のしきい値以上であるときには、予め設定した第2の車線変更パターンで右に車線変更すると判断する。なお、この第2の車線変更パターンは、前記第1の車線変更パターン1よりも小さな操舵角で車線変更制御を行うように設定されたパターンである。
【0107】
つまり、右に車線変更するよう判断されたときには、右に車線のある信頼度の大きさに応じて、走行支援内容を設定し、信頼度が低いときには、車線変更の報知や表示のみを行い、運転者の操舵操作により車線変更を行うことにより、安全性を確保し、信頼度が高いときには、運転者の操舵操作を伴うことなく自動操舵により速やかな車線変更を行うようにしている。
【0108】
一方、左に車線変更すると判断された場合も、上記と同様であって、左に車線のある信頼度の大きさに応じて、第1から第4のしきい値との大小関係に応じて走行支援内容を決定する。
そして、前記ステップS6の処理で車線を維持すると判断されたときには、現在の車線を維持すると判断する。
このようにして、走行支援内容を決定したならばステップS72からステップS73に移行し、ステップS72で決定した走行支援内容に応じた走行支援を行う。
【0109】
つまり、現在の車線を維持すると判断されたときには、前記ステップS71で設定された目標地点yh*と自車両の現在位置とが一致するように操舵角を制御する。また、運転者が車線変更を行おうとしている場合には現在の車線を維持するよう表示音声出力装置6を作動させて報知する。また、表示により車線変更の報知を行うと判断したときには表示音声出力装置6を作動させ音声によって車線変更を推奨する旨の報知を行う。また、表示及び音声によって車線変更の報知を行うと判断したときには表示音声出力装置6を作動させ表示及び音声によって報知を行う。
【0110】
また、第1の車線変更パターンで車線変更を行うと判断されたときには、ステップS71で設定した目標地点yh*を、右への車線変更の場合には車線幅Wrを加算し、左への車線変更の場合には車線幅Wrを減算した値を目標地点yh*として更新設定し、自車両の現在位置が目標地点yh*と一致するように操舵角を制御するが、このとき操舵角の変化が予め設定した、操舵角変化の小さい第1の車線変更パターンで変化するように制御を行う。また、第2車線変更パターンで車線変更を行うと判断されたときには、同様にして、ステップS71で設定した目標地点yh*を車線幅Wrで補正し、補正後の目標地点yh*と自車両の現在位置とが一致するように操舵角を制御するが、このとき操舵角の変化が、第1車線変更パターンにおける操舵角変の変化量よりも大きな第2車線変更パターンで変化するように制御を行う。つまり、第2車線変更パターンは、第1車速変更パターンに比較して操舵角の変化度合が大きくすなわち速やかな車線変更を実現する。
【0111】
このように、車線変更をするかどうかの判断と、自車両Mの右又は左に車線がある信頼度とに基づいて走行支援内容を判断し、信頼度が低いときには自動操舵による車線変更は行わず信頼度が高いときにのみ自動操舵による車線変更を行うようにしているから安全性をより向上させることができる。
なお、上記各実施の形態においては、自車両及び周囲車両の車線位置を推定し、これに基づいて推奨する車線情報を運転者に提供する場合について説明したが、これに限るものではなく、例えば、自車両周辺の車両の位置情報を道路地図情報と共に情報提供するようにした走行支援装置や、ナビゲーション装置等、自車両や周囲車両の位置情報に基づいて情報提供や走行支援等を行う装置であっても適用することができる。
【0112】
また、上記実施の形態においては、自車両及び周囲車両の車線位置を推定する場合について説明したが、上述のように道路上の、道路幅方向の各地点における、この位置に車両が存在する信頼度を検出することができるから、例えば、車線内の右よりの位置或いは左よりの位置等、車線内のどの位置に存在するかをも検出するようにしてもよく、また、車線単位ではなく、道路幅方向のどの地点に存在する可能性が高いかを検出することも可能である。
【0113】
ここで、上記各実施の形態において、図2のステップS2の処理が車線数検出手段に対応し、図8のステップS43aで、推定対象車両iに対する位置検出用車両kの相対位置情報を算出する処理が相対位置検出手段に対応し、図8のステップS43b及びステップS43cの処理が車両位置推定手段に対応している。
また、図8のステップS43aの処理で、相対位置情報を履歴情報として格納する記憶領域が履歴記憶手段に対応している。
【0114】
また、車々間通信機5が車々間通信手段に対応している。
また、図6のステップS31の処理が自車両位置推定手段に対応し、図6のステップS34の処理が周囲車両位置推定手段に対応し、図2のステップS7の処理が走行支援手段に対応し、図7のステップS47の処理及び図16のステップS58の処理が車線存在信頼度算出手段に対応している。
また、第1の実施の形態において、図7のステップS46の処理及び図16のステップS57の処理が信頼度算出手段に対応し、第2の実施の形態において、図21のステップS46aの処理及び図16のステップS57の処理が信頼度算出手段に対応している。
【図面の簡単な説明】
【0115】
【図1】本発明の車両用走行支援装置の構成を示す構成図である。
【図2】図1のコントローラで実行される演算処理の処理手順の一例を示すフローチャートである。
【図3】車線数の設定方法を説明するための図である。
【図4】図2のステップS5の加減速度の算出処理の処理手順の一例を示すフローチャートである。
【図5】図2のステップS7の走行支援処理の処理手順の一例を示すフローチャートである。
【図6】図2のステップS3の自車両及び周囲車両の車線位置の推定処理の処理手順の一例を示すフローチャートである。
【図7】図6のステップS31の自車両の車線位置の推定処理の処理手順の一例を示すフローチャートである。
【図8】図7のステップS43で自車両の車線位置の信頼度を算出する際の処理手順の一例を示すフローチャートである。
【図9】信頼度の算出方法を説明するための説明図である。
【図10】信頼度の算出方法を説明するための説明図である。
【図11】信頼度の算出方法を説明するための説明図である。
【図12】信頼度の算出方法を説明するための説明図である。
【図13】所定時間における信頼度を加算して得た信頼度分布の一例である。
【図14】推定対象車両の絶対位置ylを説明するための説明図である。
【図15】推定対象車両の絶対位置の信頼度の分布の一例である。
【図16】図6のステップS34の周囲車両の車線位置の推定処理の処理手順の一例を示すフローチャートである。
【図17】第1の実施の形態の動作説明に供する説明図である。
【図18】第1の実施の形態の動作説明に供する説明図である。
【図19】第1の実施の形態の動作説明に供する説明図である。
【図20】第2の実施の形態における車両用走行支援装置の一例を示す構成図である。
【図21】第2の実施の形態における、図6のステップS31の自車両の車線位置の推定処理の処理手順の一例を示すフローチャートである。
【図22】第2の実施の形態における、図2のステップS7の走行支援処理の処理手順の一例を示すフローチャートである。
【図23】第3の実施の形態における、図2のステップS7の走行支援処理の処理手順の一例を示すフローチャートである。
【符号の説明】
【0116】
1 車速センサ
2 ナビゲーション装置
3 ヨーレートセンサ
4 ウインカ
5 車々間通信機
6 表示音声出力装置
7 前方検知カメラ
8 ステアリングアクチュエータ
10 コントローラ
100、100a 走行支援装置
【特許請求の範囲】
【請求項1】
一の車両が走行中の道路の、前記一の車両の走行車線と同一方向の車線である同一方向車線の車線数を検出する車線数検出手段と、
前記同一方向車線上の他の車両の、前記一の車両に対する相対位置を検出する相対位置検出手段と、
前記車線数検出手段で検出される前記同一方向車線の車線数及び前記相対位置検出手段で検出した前記相対位置に基づいて、前記一の車両の前記道路上における道路幅方向の位置を推定する車両位置推定手段と、を備えることを特徴とする車両位置推定装置。
【請求項2】
前記車両位置推定手段は、前記相対位置検出手段で検出した前記一の車両に対する前記他の車両の相対位置のばらつき範囲を設定し、このばらつき範囲を考慮して前記推定を行うことを特徴とする請求項1記載の車両位置推定装置。
【請求項3】
前記相対位置検出手段で検出した前記一の車両に対する前記他の車両の相対位置の所定期間分の最新の履歴を記憶する履歴記憶手段を備え、
前記車両位置推定手段は、前記履歴記憶手段で記憶する前記相対位置の履歴に基づいて前記推定を行うことを特徴とする請求項1又は請求項2に記載の車両位置推定装置。
【請求項4】
前記相対位置検出手段は、複数の前記他の車両について前記相対位置を検出し、
前記車両位置推定手段は、前記相対位置検出手段で検出した前記複数の他の車両の相対位置に基づいて前記推定を行うことを特徴とする請求項1から請求項3の何れか1項に記載の車両位置推定装置。
【請求項5】
前記車両位置推定手段は、前記一の車両の、前記道路上における道路幅方向の位置の推定結果の信頼度を算出する信頼度算出手段を備え、
当該信頼度算出手段で算出した信頼度に基づいて前記一の車両がどの車線を走行しているかを推定することを特徴とする請求項1から請求項4の何れか1項に記載の車両位置推定装置。
【請求項6】
前記信頼度算出手段は、前記一の車両と前記他の車両との間の距離が短いときほど前記信頼度が高くなるように、前記信頼度を算出することを特徴とする請求項5記載の車両位置推定装置。
【請求項7】
前記相対位置検出手段で検出した前記一の車両に対する前記他の車両の相対位置の所定期間分の最新の履歴を記憶する履歴記憶手段を備え、
前記車両位置推定手段は、前記履歴記憶手段で記憶する前記相対位置の履歴に基づいて前記推定を行い、
前記信頼度算出手段は、前記履歴記憶手段で記憶する前記相対位置の履歴のうち、新しいものほど信頼度が高くなるように前記信頼度を算出することを特徴とする請求項5又は請求項6記載の車両位置推定装置。
【請求項8】
前記一の車両は自車両であることを特徴とする請求項1から請求項7の何れか1項に記載の車両位置推定装置。
【請求項9】
自車両の現在位置を検出する自車位置検出手段と、
前記他の車両との間で車々間通信を行い前記他の車両の位置情報を獲得する車々間通信手段と、を備え、
前記相対位置検出手段は、前記自車位置検出手段で検出した自車両の位置情報及び前記車々間通信手段で獲得した前記他の車両の位置情報に基づいて前記相対位置を検出することを特徴とする請求項8記載の車両位置推定装置。
【請求項10】
前記一の車両は自車両とは異なる車両であることを特徴とする請求項1から請求項7の何れか1項に記載の車両位置推定装置。
【請求項11】
前記一の車両及び他の車両との間で車々間通信を行い前記一の車両及び前記他の車両の位置情報を獲得する車々間通信手段を備え、
前記相対位置検出手段は、前記車々間通信手段で獲得した前記一の車両及び前記他の車両の位置情報に基づいて、前記他の車両の、前記一の車両に対する相対位置を検出することを特徴とする請求項10記載の車両位置推定装置。
【請求項12】
請求項1から請求項7の何れか1項に記載の車両位置推定装置を有し、自車両の道路幅方向の位置を推定する自車両位置推定手段と、
請求項1から請求項7の何れか1項に記載の車両位置推定装置を有し、自車両が走行中の道路の、自車両の走行車線と同一方向の車線上に存在する周囲車両の道路幅方向の位置を推定する周囲車両位置推定手段と、
前記自車両位置推定手段及び前記周囲車両位置推定手段の推定結果に基づいて自車両の走行支援を行う走行支援手段と、を備えることを特徴とする車両用走行支援装置。
【請求項13】
前記走行支援手段は、前記自車両位置推定手段及び前記周囲車両位置推定手段の各信頼度推定手段で算出される、自車両及び周囲車両の車両位置の推定結果の信頼度に応じて前記走行支援の支援内容を変更することを特徴とする請求項12記載の車両用走行支援装置。
【請求項14】
前記自車両位置推定手段の前記車両位置推定手段は、前記道路上において自車両の右側及び左側に車線が存在する信頼度を個別に算出する車線存在信頼度算出手段を備え、
前記走行支援手段は、前記車線存在信頼度算出手段で算出される、自車両の右側及び左側に車線が存在する信頼度に応じて前記走行支援の支援内容を変更することを特徴とする請求項12又は請求項13記載の車両用走行支援装置。
【請求項15】
一の車両が走行中の道路の、前記一の車両の進行方向と同一方向の車線の車線数を検出すると共に、前記一の車両の進行方向と同一方向の車線上の他の車両の、前記一の車両に対する相対位置を検出し、前記同一方向の車線の車線数と前記相対位置とに基づいて、前記一の車両の前記道路上における道路幅方向の位置を推定することを特徴とする車両位置推定方法。
【請求項16】
自車両及び、自車両が走行中の道路上の自車両の進行方向と同一方向の車線上に存在する自車両の周囲車両の、前記道路上における道路幅方向の位置を推定する車両位置推定方法であって、
自車両が走行中の道路の、自車両の進行方向と同一方向の車線の車線数を検出し、
自車両の進行方向と同一方向の車線上に位置する他の車両を自車両の位置検出用車両として、当該自車両の位置検出用車両の、自車両に対する相対位置を検出し、検出した自車両に対する相対位置と前記車線数とに基づいて自車両の前記道路上における道路幅方向の位置を推定し、
さらに、自車両の進行方向と同一方向の車線上に位置する前記周囲車両を除く他の車両を前記周囲車両の位置検出用車両とし、当該周囲車両の位置検出用車両の、前記周囲車両に対する相対位置を検出し、検出した前記周囲車両に対する相対位置と前記車線数とに基づいて前記周囲車両の前記道路上における道路幅方向の位置を推定することを特徴とする車両用位置推定方法。
【請求項1】
一の車両が走行中の道路の、前記一の車両の走行車線と同一方向の車線である同一方向車線の車線数を検出する車線数検出手段と、
前記同一方向車線上の他の車両の、前記一の車両に対する相対位置を検出する相対位置検出手段と、
前記車線数検出手段で検出される前記同一方向車線の車線数及び前記相対位置検出手段で検出した前記相対位置に基づいて、前記一の車両の前記道路上における道路幅方向の位置を推定する車両位置推定手段と、を備えることを特徴とする車両位置推定装置。
【請求項2】
前記車両位置推定手段は、前記相対位置検出手段で検出した前記一の車両に対する前記他の車両の相対位置のばらつき範囲を設定し、このばらつき範囲を考慮して前記推定を行うことを特徴とする請求項1記載の車両位置推定装置。
【請求項3】
前記相対位置検出手段で検出した前記一の車両に対する前記他の車両の相対位置の所定期間分の最新の履歴を記憶する履歴記憶手段を備え、
前記車両位置推定手段は、前記履歴記憶手段で記憶する前記相対位置の履歴に基づいて前記推定を行うことを特徴とする請求項1又は請求項2に記載の車両位置推定装置。
【請求項4】
前記相対位置検出手段は、複数の前記他の車両について前記相対位置を検出し、
前記車両位置推定手段は、前記相対位置検出手段で検出した前記複数の他の車両の相対位置に基づいて前記推定を行うことを特徴とする請求項1から請求項3の何れか1項に記載の車両位置推定装置。
【請求項5】
前記車両位置推定手段は、前記一の車両の、前記道路上における道路幅方向の位置の推定結果の信頼度を算出する信頼度算出手段を備え、
当該信頼度算出手段で算出した信頼度に基づいて前記一の車両がどの車線を走行しているかを推定することを特徴とする請求項1から請求項4の何れか1項に記載の車両位置推定装置。
【請求項6】
前記信頼度算出手段は、前記一の車両と前記他の車両との間の距離が短いときほど前記信頼度が高くなるように、前記信頼度を算出することを特徴とする請求項5記載の車両位置推定装置。
【請求項7】
前記相対位置検出手段で検出した前記一の車両に対する前記他の車両の相対位置の所定期間分の最新の履歴を記憶する履歴記憶手段を備え、
前記車両位置推定手段は、前記履歴記憶手段で記憶する前記相対位置の履歴に基づいて前記推定を行い、
前記信頼度算出手段は、前記履歴記憶手段で記憶する前記相対位置の履歴のうち、新しいものほど信頼度が高くなるように前記信頼度を算出することを特徴とする請求項5又は請求項6記載の車両位置推定装置。
【請求項8】
前記一の車両は自車両であることを特徴とする請求項1から請求項7の何れか1項に記載の車両位置推定装置。
【請求項9】
自車両の現在位置を検出する自車位置検出手段と、
前記他の車両との間で車々間通信を行い前記他の車両の位置情報を獲得する車々間通信手段と、を備え、
前記相対位置検出手段は、前記自車位置検出手段で検出した自車両の位置情報及び前記車々間通信手段で獲得した前記他の車両の位置情報に基づいて前記相対位置を検出することを特徴とする請求項8記載の車両位置推定装置。
【請求項10】
前記一の車両は自車両とは異なる車両であることを特徴とする請求項1から請求項7の何れか1項に記載の車両位置推定装置。
【請求項11】
前記一の車両及び他の車両との間で車々間通信を行い前記一の車両及び前記他の車両の位置情報を獲得する車々間通信手段を備え、
前記相対位置検出手段は、前記車々間通信手段で獲得した前記一の車両及び前記他の車両の位置情報に基づいて、前記他の車両の、前記一の車両に対する相対位置を検出することを特徴とする請求項10記載の車両位置推定装置。
【請求項12】
請求項1から請求項7の何れか1項に記載の車両位置推定装置を有し、自車両の道路幅方向の位置を推定する自車両位置推定手段と、
請求項1から請求項7の何れか1項に記載の車両位置推定装置を有し、自車両が走行中の道路の、自車両の走行車線と同一方向の車線上に存在する周囲車両の道路幅方向の位置を推定する周囲車両位置推定手段と、
前記自車両位置推定手段及び前記周囲車両位置推定手段の推定結果に基づいて自車両の走行支援を行う走行支援手段と、を備えることを特徴とする車両用走行支援装置。
【請求項13】
前記走行支援手段は、前記自車両位置推定手段及び前記周囲車両位置推定手段の各信頼度推定手段で算出される、自車両及び周囲車両の車両位置の推定結果の信頼度に応じて前記走行支援の支援内容を変更することを特徴とする請求項12記載の車両用走行支援装置。
【請求項14】
前記自車両位置推定手段の前記車両位置推定手段は、前記道路上において自車両の右側及び左側に車線が存在する信頼度を個別に算出する車線存在信頼度算出手段を備え、
前記走行支援手段は、前記車線存在信頼度算出手段で算出される、自車両の右側及び左側に車線が存在する信頼度に応じて前記走行支援の支援内容を変更することを特徴とする請求項12又は請求項13記載の車両用走行支援装置。
【請求項15】
一の車両が走行中の道路の、前記一の車両の進行方向と同一方向の車線の車線数を検出すると共に、前記一の車両の進行方向と同一方向の車線上の他の車両の、前記一の車両に対する相対位置を検出し、前記同一方向の車線の車線数と前記相対位置とに基づいて、前記一の車両の前記道路上における道路幅方向の位置を推定することを特徴とする車両位置推定方法。
【請求項16】
自車両及び、自車両が走行中の道路上の自車両の進行方向と同一方向の車線上に存在する自車両の周囲車両の、前記道路上における道路幅方向の位置を推定する車両位置推定方法であって、
自車両が走行中の道路の、自車両の進行方向と同一方向の車線の車線数を検出し、
自車両の進行方向と同一方向の車線上に位置する他の車両を自車両の位置検出用車両として、当該自車両の位置検出用車両の、自車両に対する相対位置を検出し、検出した自車両に対する相対位置と前記車線数とに基づいて自車両の前記道路上における道路幅方向の位置を推定し、
さらに、自車両の進行方向と同一方向の車線上に位置する前記周囲車両を除く他の車両を前記周囲車両の位置検出用車両とし、当該周囲車両の位置検出用車両の、前記周囲車両に対する相対位置を検出し、検出した前記周囲車両に対する相対位置と前記車線数とに基づいて前記周囲車両の前記道路上における道路幅方向の位置を推定することを特徴とする車両用位置推定方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【公開番号】特開2007−126086(P2007−126086A)
【公開日】平成19年5月24日(2007.5.24)
【国際特許分類】
【出願番号】特願2005−322308(P2005−322308)
【出願日】平成17年11月7日(2005.11.7)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
【公開日】平成19年5月24日(2007.5.24)
【国際特許分類】
【出願日】平成17年11月7日(2005.11.7)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
[ Back to top ]