
車両位置提示方法、及びカーナビゲーション装置
【課題】衛星が見渡せない場所であっても車両の現在位置を特定し、かつ、車両の現在位置の特定精度を向上させる。
【解決手段】タグ200は、各所に設けられたマンホール300内に設置されている。走行する車両400のリーダ500は、マンホール300内に設置されたタグ200からタグ受信情報(ID)を読み取る。位置特定部603は、読み取ったタグ受信情報(ID)と登録タグ情報記憶部602の登録タグ情報(のID)とを照合し、対応するタグ200の設置場所(経度、緯度)を特定する。地図情報機能部605は、位置特定部603から供給されるタグの設置場所(緯度、経度)を補正情報として、GPS機能部604から供給される現在位置(経度、緯度)とともに地図情報上にプロットし、表示機能部606により表示する。
【解決手段】タグ200は、各所に設けられたマンホール300内に設置されている。走行する車両400のリーダ500は、マンホール300内に設置されたタグ200からタグ受信情報(ID)を読み取る。位置特定部603は、読み取ったタグ受信情報(ID)と登録タグ情報記憶部602の登録タグ情報(のID)とを照合し、対応するタグ200の設置場所(経度、緯度)を特定する。地図情報機能部605は、位置特定部603から供給されるタグの設置場所(緯度、経度)を補正情報として、GPS機能部604から供給される現在位置(経度、緯度)とともに地図情報上にプロットし、表示機能部606により表示する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自動車などの車両の位置を地図上に提示する車両位置提示方法、及びカーナビゲーション装置に関する。
【背景技術】
【0002】
カーナビゲーションシステム(以下、カーナビという)で車両の位置を特定するGPS(Global Positioning System:全地球測位システム)は、複数のGPS衛星のそれぞれからの距離を計測し、車両の位置を特定するシステムである。この特定精度を向上する従来技術としては、衛星測位用信号受信装置(GPS衛星測位用信号と同種のGalileo衛星測位用信号とを併用して受信する装置、以下“Galileo併用受信装置”という)が知られている(例えば、特許文献1参照)。
【0003】
図13は、従来技術によるGalileo併用受信装置の構成を示すブロック図である。図において、Galileo併用受信装置は、アンテナ11、アンプ部21、基準水晶発信器51、デジタル処理部81、操作受付部91を備え、ミキサ部31、32、IFアンプ部61、62、IFフィルタ部71、72、局部発信器41、42については、2系統備える構成である。該Galileo併用受信装置において、2系統備えた構成の一方でGPS衛星の測位用信号を受信し、他方でGalileo衛星測位用信号を受信する。1つしかない構成要素は、GPSとGalileoと双方で測位用信号受信に共用使用する。このように、GPS衛星の測位用信号とGalileo衛星測位用信号とを用いることにより、特定位置の精度を向上させている。
【0004】
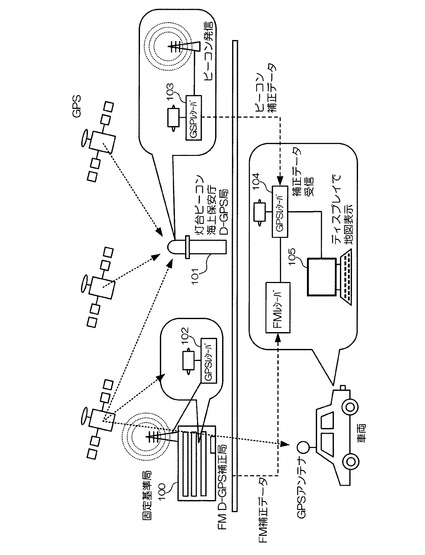
また、他の従来技術として、GPSにより特定する位置の誤差を改善(精度を向上)するDGPS(ディファレンシャルGPS)を用いた技術が知られている(例えば、非特許文献1)。図14は、従来技術によるDGPSを用いたシステム構成を示すブロック図である。図において、当該システムではDGPS補正局100や、灯台ビーコン101など(いずれも固定局)で、GPS受信装置102、103よって測定された位置情報(緯度と経度)を、正確な位置情報(緯度と緯度)と比べて、その差分となる補正データ(FM補正データ、ビーコン補正データ)を、車両側のGPS受信装置104に送信する。この補正データのユーザへの送信には、FM波を用いる。車両側のGPS受信装置104では、受信した補正データを用いて、自身で測定した位置情報(緯度と経度)を補正する。そして、カーナビ105などの地図表示において、自身の位置を特定する精度を向上させている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2005−207888号公報
【非特許文献】
【0006】
【非特許文献1】“IMT−2000時代の位置情報ビジネス,”INTERNET magazine,pp.234−pp.248,2000/6.
【発明の概要】
【発明が解決しようとする課題】
【0007】
ところで、カーナビの位置特定に用いるGPSが有効に機能しない環境として、衛星が見渡せない高層ビルが多い都市部や、高架道路の下側道路、トンネル内などがある。例えば、高層ビルの谷間を走行する車両においては、空を見渡せる範囲が20°〜30°しかなく、地球を回る全GPS衛星の個数が24個であるので、単純に計算すると、その内の1〜2個のGPS衛星しか見通せない。GPS受信装置では、位置を特定するために最低4個(これは3次元空間の場合であり、2次元平面上で場所を特定する場合でも最低3個)の衛星が必要であるので、GPS衛星を用いた測位はできないという問題がある。
【0008】
また、Galileo衛星を活用しても同様に場所の特定は不可能であり、さらに、GPSでの測位精度を向上させる固定基準局、灯台ビーコンからの電波も受信しても、位置の特定自体が無理であり、有効に機能しないという問題がある。
【0009】
また、高架下を走行する車両においては、GPS衛星(あるいは、Galileo衛星や、固定基準局、灯台ビーコン)からの電波による情報を受信し難い。従って、車両の位置を特定することができなかったり、その特定した位置の精度が不十分であったりするという問題があった。
【0010】
また、トンネル内を走行する車両においても、トンネル内の車両は、GPS衛星や、Galileo衛星はもちろん固定基準局、灯台ビーコンからの電波も受信し難い。この場合も、当然、これらの情報からその車両の位置を特定することができないという問題があった。
【0011】
カーナビにおいては、高架道路の上下の区別や、交差点前の直進と右折レーンの認識、高速道路のジャンクションでの車線選択などができる程度に自身の位置を特定する精度が実現できると便利である。しかしながら、非特許文献1の240頁に記載されているように、「現在のところ、民間利用では、位置測位精度が常に100m程度の誤差を含んでいる」、「日本国内では、DGPSという誤差を補正するタイプの新しいGPSシステムによって、従来の衛星からの直接受信によるGPSに比べて、位置測定の精度が約10倍に向上」とあるように、上述した目標を達成するための位置精度(数m)を得るには、まだ不十分である。
【0012】
本発明は、このような事情を考慮してなされたものであり、その目的は、衛星が見渡せない場所であっても車両の位置を特定することができ、かつ、車両の位置の特定精度を向上させることができる車両位置提示方法、及びカーナビゲーション装置を提供することにある。
【課題を解決するための手段】
【0013】
上述した課題を解決するために、本発明は、車両の位置を提示する車両位置提示方法であって、前記車両の近傍に敷設されている通信設備に設置された無線タグから前記車両に搭載された読取装置により前記無線タグの識別情報を読み取るステップと、無線タグの識別情報と設置場所とが関連付けて予め記憶されている登録タグ情報記憶部から、前記読み取った無線タグの識別情報に対応付けられている設置場所を読み出して、前記無線タグの設置場所を特定するステップと、前記特定した無線タグの設置場所を提示するステップとを含むことを特徴とする車両位置提示方法である。
【0014】
本発明は、上記の発明において、前記車両に搭載されたGPS機能部により位置情報を取得するステップ、を含み、前記特定した無線タグの設置場所を提示するステップにおいて、前記特定した無線タグの設置場所を地図情報上に提示するとともに、前記GPS機能部により取得した位置情報を前記地図情報上に提示することを特徴とする。
【0015】
本発明は、上記の発明において、前記読取装置により前記無線タグの識別情報が読み取られた場所で前記GPS機能部により位置情報を取得するステップと、前記GPS機能部により取得した位置情報と、該位置情報に対応する地図情報とに基づいて、前記無線タグの設置場所を特定するステップと、前記無線タグの識別情報と前記特定した無線タグの設置場所とを対応付けて前記登録タグ情報記憶部に登録するステップとを含むことを特徴とする。
【0016】
本発明は、上記の発明において、前記通信設備は、道路上に敷設されているマンホール、または電柱であることを特徴とする。
【0017】
本発明は、上記の発明において、前記車両に搭載された読取装置により前記無線タグの識別情報を読み取る際、最も近傍に存在する無線タグの識別情報を読み取るために、前記読取装置の受信感度を調整するステップを更に含むことを特徴とする。
【0018】
また、上述した課題を解決するために、本発明は、車両の位置を提示するカーナビゲーション装置であって、前記車両の近傍に敷設されている通信設備に設置された無線タグの識別情報を読み取る読取手段と、無線タグの識別情報と無線タグの設置場所とを対応付けて予め記憶する登録タグ情報記憶手段と、前記登録タグ情報記憶手段から、前記読取手段により読み取った無線タグの識別情報に関連付けられている設置場所を読み出して、前記無線タグの設置場所を特定する位置特定手段と、前記位置特定手段により特定された前記無線タグの設置場所を提示する提示手段とを備えることを特徴とするカーナビゲーション装置である。
【0019】
本発明は、上記の発明において、前記車両に搭載され、位置情報を取得するGPS機能手段を更に備え、前記提示手段は、前記特定した無線タグの設置場所を提示する際、前記特定した無線タグの設置場所を地図情報上に提示するとともに、前記GPS機能手段により取得した位置情報を前記地図情報上に提示することを特徴とする。
【0020】
本発明は、上記の発明において、前記GPS機能手段は、前記読取手段により前記無線タグの識別情報が読み取られた場所で位置情報を取得し、前記位置特定手段は、前記GPS機能部により取得した位置情報と、該位置情報に対応する地図情報とに基づいて、前記読取手段により読み取られた前記無線タグの設置場所を特定し、前記無線タグの識別情報と前記位置特定手段により特定された前記無線タグの設置場所とを対応付けて前記登録タグ情報記憶手段に記憶することを特徴とする。
【0021】
本発明は、上記の発明において、前記通信設備は、道路上に敷設されているマンホール、または電柱であることを特徴とする。
【0022】
本発明は、上記の発明において、前記読取手段は、前記無線タグの識別情報を読み取る際、自身の受信感度を調整し、最も近傍に存在する無線タグの識別情報を読み取ることを特徴とする。
【発明の効果】
【0023】
この発明によれば、車両の近傍に敷設されている通信設備に設置された無線タグから読み取った識別情報に基づいて当該無線タグの設置場所を特定することにより、衛星が見渡せない場所であっても車両の現在位置を特定することができ、かつ、車両の現在位置の特定精度を向上させることができる。
【図面の簡単な説明】
【0024】
【図1】本発明の第1実施形態による車両位置特定システムの構成を示すブロック図である。
【図2】本第1実施形態によるタグの構成を示す斜視図である。
【図3】本第1実施形態において、走行する車両と道路にあるマンホールとの関係について説明する図である。
【図4】本第1実施形態による、タグの登録タグ情報の一例を示す概念図である。
【図5】本第1実施形態において、カーナビ600での地図情報の表示例を示す概念図である。
【図6】本第1実施形態において、車両が走行する様々な状況で高精度な現在位置を取得する様子を示す概念図である。
【図7】本第1実施形態において、車両が走行する様々な状況で高精度な現在位置を取得する様子を示す概念図である。
【図8】本第1実施形態において、車両が走行する様々な状況で高精度な現在位置を取得する様子を示す概念図である。
【図9】本第1実施形態において、マンホールのタグとカーナビの利用関係を示す概念図である。
【図10】本発明の第2実施形態による車両位置特定システムの構成を示すブロック図である。
【図11】本第2実施形態において、電柱に設置されたタグからの電波受信可能な範囲を示す概念図である。
【図12】本第3実施形態による、通信設備(タグ)の資産情報の登録方法を説明するためブロック図である。
【図13】従来技術によるGalileo併用受信装置の構成を示すブロック図である。
【図14】従来技術によるDGPSを用いたシステム構成を示すブロック図である。
【発明を実施するための形態】
【0025】
以下、本発明の一実施形態を、図面を参照して説明する。
【0026】
A.第1実施形態
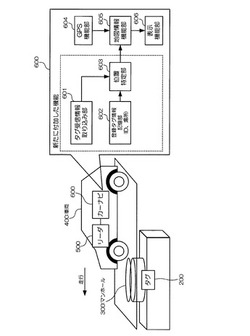
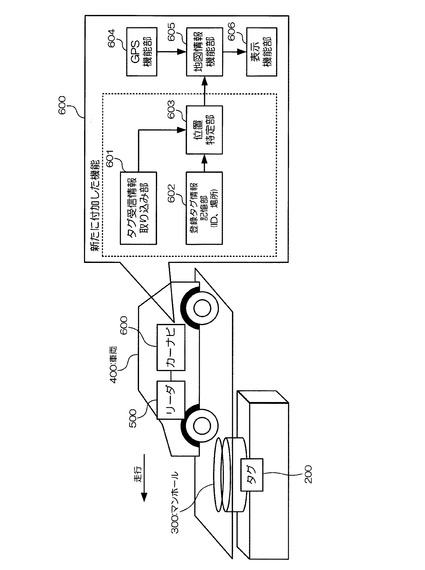
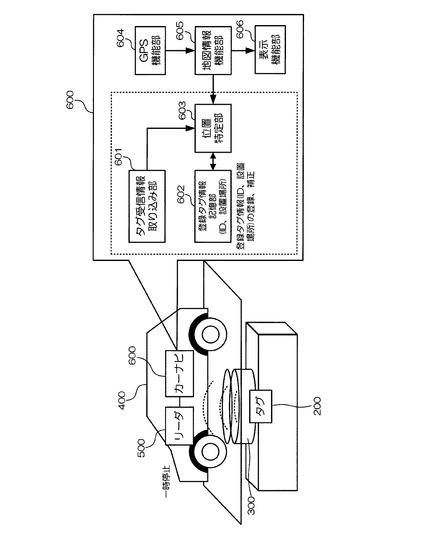
図1は、本発明の第1実施形態による車両位置特定システムの構成を示すブロック図である。図において、無線タグ(ICタグ、電子タグ、RFタグ、RFID:Redio Frequency Identificationとも言われる。以下、タグという)200は、各所に設けられたマンホール300内に設置され、車道を走行する車両400に搭載された読取装置(読取装置、質問器、タグ受信機とも言われる。以下、リーダという)500に対して、タグ200を識別するためのタグ受信情報(ID)を送信する。リーダ500は、マンホール300内に設置されたタグ200からタグ受信情報(ID)を読み取り、カーナビ600に供給する。
【0027】
カーナビ600は、車両400に搭載されており、既存のGPS機能部604や、地図情報機能部605、表示機能部606などに加え、タグ受信情報取り込み部601、登録タグ情報記憶部602、位置特定部603を備えている。タグ受信情報取り込み部601は、リーダ500からのタグ受信情報(ID)の取り込むインタフェースとして機能し、取り込んだタグ受信情報(ID)を位置特定部603に供給する。
【0028】
登録タグ情報記憶部602は、車道の各所に設けられたマンホール300内に設置された複数のタグ200(図では1つ)に対して、登録タグ情報(ID、設置場所:経度、緯度)を予め保持している。なお、登録タグ情報のデータ構成ついては後述する。また、該登録タグ情報は、タグ200を設置した場合に新たに登録されたり、適宜、補正、更新されたりするが、この詳細については後述する第3実施形態で説明する。位置特定部603は、タグ受信情報取り込み部601から供給されるタグ受信情報(ID)と登録タグ情報記憶部602に記憶されている登録タグ情報(のID)とを照合し、対応するタグ200の設置場所(経度、緯度)を特定し、地図情報機能部605に供給する。
【0029】
GPS機能部604は、4つ以上のGPS衛星の電波を捉え、その電波の中に含む高精度の送信時刻情報を利用して、到達までに要する時間から距離を計算し、計算により得られた4つ以上の衛星からの距離から自身の現在位置(経度、緯度)を特定し、地図情報機能部605に供給する。地図情報機能部605は、位置特定部603から供給されるタグの設置場所(緯度、経度)を補正情報として、GPS機能部604から供給される現在位置(経度、緯度)とともに、地図情報上にプロットする。表示機能部606は、地図情報機能部605から供給される、タグの設置場所(緯度、経度)、GPS機能部604から供給される現在位置(経度、緯度)がプロットされた地図情報を表示する。
【0030】
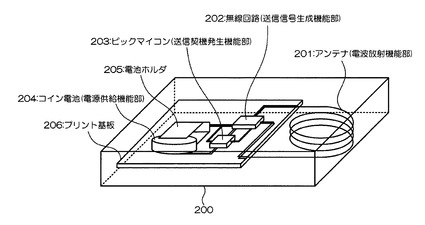
図2は、本第1実施形態によるタグの構成を示す斜視図である。図において、タグ200は、電池を搭載したアクティブ型無線タグであり、アンテナ(電波放射機能)201、無線回路(送信信号生成機能)202、ピックマイコン(送信契機発生機能)203、コイン電池(電源供給機能)204から構成されている。アンテナ201は、電波による信号を送信する。無線回路202は、その送信する信号を生成する。ピックマイコン203は、送信する信号を生成して送信する指令をする。また、その指令のタイミングを決めることも行う。さらに、送信する信号に含まれるタグのID(識別子)が書き込まれており、そのIDを無線回路202に送り、信号生成をさせる。コイン電池204は、タグ200を動作させる電力を、無線回路202や、ピックマイコン203に供給する。
【0031】
また、図2には、タグ200の装置構成を実装するパーツとして電池ホルダ205と、プリント基板206とを示した。電池ホルダ205は、コイン電池204を格納する。プリント基板206上には、上述したアンテナ201以外の無線回路202、ピックマイコン203、電池ホルダ205が実装されている。
【0032】
なお、図2には、アクティブ型無線タグの構成を示したが、電池を持たないパッシブ型の無線タグであっても、走行する自動車に搭載されたリーダ500から、タグ200の情報が読めれば、その形態はどのようなものでも構わない。
【0033】
上述した構成において、車両400が車道を走行している間、該車両400に搭載されたリーダ500は、マンホール300内に設置されたタグ200からタグ受信情報(ID)を読み取り、位置特定部603は、タグ受信情報(ID)と登録タグ情報(のID)とを照合し、対応するタグの設置場所(経度、緯度)を特定する。地図情報機能部605は、この特定された設置場所(経度、緯度)と、カーナビのGPS機能部604から得られる現在位置とを地図情報に表示し、表示機能部606は、地図情報機能部605からの地図情報とともに、高精度な現在位置をユーザに提示する。
【0034】
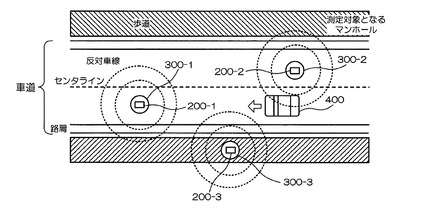
ここで、図3は、本第1実施形態において、走行する車両と道路にあるマンホールとの関係について説明する図である。図において、車両400は、車道の一方の車線を、矢印方向を進行方向として走行している。車道、及び歩道には、マンホール300−1〜300−3が存在し、これらマンホール300−1〜300−3の各々には、タグ200−1〜200−3が設置されている。
【0035】
車両400は、近傍のマンホール(図3では、正に反対車線の測定対象となるマンホール300−2)内に設置されたタグ200−2の電波を受信できる場所(マンホール300−2の周囲に描く破線の円内が電波を受信可能な範囲、半径:約5〜7m)を走行中である。この時点で車両400に搭載したリーダ500は、その反対車線の測定対象となるマンホール300−2に設置されたタグ200−2の情報を受信することになる。
【0036】
なお、図3に示す走行車線のマンホール300−1に設置されたタグ200−1の電波は走行する車両400で当然受信できるが、同図に示すように、走行車線以外のマンホール(反対車線や、歩道のマンホール300−1、300−3)からもタグ200−1、200−3の電波が(半径約5〜7mの円内の範囲で)受信可能である。しかし、本第1実施形態では、より位置精度を向上させるために、リーダ500の受信感度を低く設定することで、走行車線のみのマンホール300−1内にあるタグ200−1の電波を捉えるようにしてもよい。これは、図3に示すマンホール300−1〜300−3の周囲に描いた破線の2つの円で小さな円内を電波の受信範囲とすればよい。
【0037】
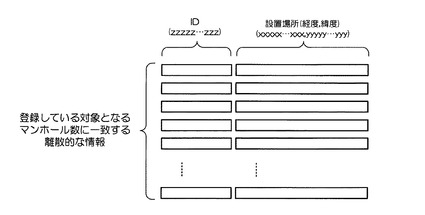
次に、図4は、本第1実施形態による、タグの登録タグ情報の一例を示す概念図である。図において、登録タグ情報は、図4に示すように、ID(タグのID:IDentifier、識別子)と設置場所(経度、緯度)とを1組としたものである。IDは、(zzzzz…zzz)という形態のデータであり、設置場所としては、例えば、経度と緯度(xxxxx…xxx,yyyyy…yyy)という形態のデータである。ここで、x、y、zは、それぞれ数値データである。これらの組が登録している対象のマンホール数に一致する離散的な情報となっている。例えば、東京都内において数十万個の登録タグがあると仮定するならば、その同じ数十万のマンホールが存在することになる。但し、仮にマンホールに複数のタグを設置している場合は必ずしも同数とはならないが、IDと設置場所を1組とするデータ数については登録タグであり、そのデータ数はマンホールの数を上回る。
【0038】
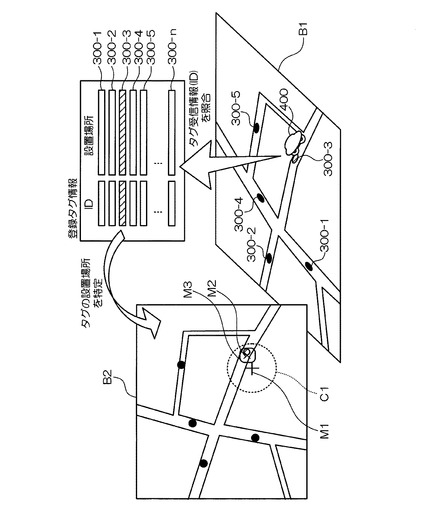
図5は、本第1実施形態において、カーナビ600での地図情報の表示例を示す概念図である。図において、ブロックB1には、車両400が道路を走行していて、マンホール300−3に設置されたタグ(図示略)のタグ受信情報(ID)を、車両400に搭載したリーダ500が受信した時点の様子を示している。
【0039】
また、同図のブロックB1に示している例の範囲においては、道路上に、マンホール300−1、300−2、300−3、300−4、300−5があり、車両400は、マンホール300−3上を通過して走行する時点を表している。従って、車両400に搭載したリーダ(図示略)は、マンホール300−3に設置したタグ(図示略)のタグ受信情報(ID)を受信している。
【0040】
車両400のカーナビ600では、登録タグ情報記憶部602に、タグのIDと、該タグの設置場所(経度、緯度)とが対応付けて記憶されている。図示の例では、上から順に、マンホール300−1、300−2、300−3、300−4、300−5、…、300−nに設置されたタグの設置場所が記憶されている。カーナビ600は、この受信したタグのタグ受信情報(ID)に基づいて、図示の登録タグ情報を参照することにより、図5に示す登録タグ情報の斜線部に示すように、予め登録している対象となるタグ(またはマンホール、この場合、マンホール300−3)の設置場所を特定することができる。
【0041】
特に、例えば、東京都内に存在する数十万個のマンホールの登録タグ情報の中からタグ受信情報(ID)に基づいて設置場所をカーナビに表示するために、高速でタグの設置場所を特定する必要が場合もある。このため、カーナビの表示範囲(図5に示すブロックB1の範囲)に存在するマンホール300−1、300−2、300−3、300−4、300−5の登録タグ情報を参照対象として予め絞り込むことにより、この絞り込んだマンホールの登録タグ情報の中からタグ受信情報(ID)に基づいて設置場所を特定することも考えられる。
【0042】
また、図5に示すブロックB2は、カーナビ600の表示機能部606で表示される地図情報を示している。ブロックB2において、十字M1は、GPS機能部604により取得された車両400の現在位置である。GPS機能部604により取得された現在位置は、そのままでは位置精度の誤差が(数十m程度と)大きいため、破線円C1で示す広い範囲内に車両400があることしか分からない。
【0043】
ここで、先ほどマンホール300−3に設置されたタグからのタグ受信情報(ID)に基づいて、該タグ(またはマンホール)の設置場所を特定しているので、その設置場所を、地図情報上に×印M2で示している。なお、タグの設置場所の位置精度は、数m程度であるので、その範囲を含む矩形M3(先のGPS機能部604により取得された現在位置である破線円C1に比べて、この矩形M3の範囲は狭い)も表示している。このように、車両400の現在位置を、地図上に、より正確に示すことができる。
【0044】
ここでも、例えば、東京都内に存在する数十万個のマンホールの登録タグ情報の中からタグ受信情報(ID)に基づいて、走行する車両の現在の位置としてタグの設置場所をカーナビに表示するために、高速でタグの設置場所を特定する必要が場合もある。このため、GPS機能により取得された位置の表示範囲(図5に示す破線の円C1の範囲)に存在するマンホール(この図5では、たまたまマンホール300−3の1か所しかないが、数か所のマンホールが存在する場合もある)の登録タグ情報を参照対象として予め絞り込む。このように絞り込んだマンホールの登録タグ情報の中からタグ受信情報(ID)に基づいて設置場所を特定することも考えられる。
【0045】
次に、図6、図7、及び図8は、本第1実施形態において、車両が走行する様々な状況で高精度な現在位置を取得する様子を示す概念図である。
【0046】
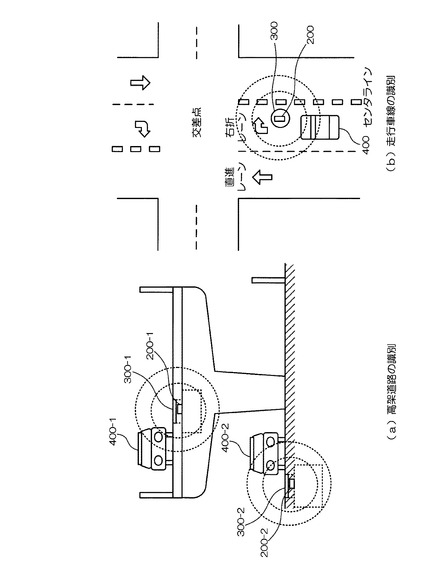
まず、図6(a)、(b)は、各々、高架道路の上下のどちらの道路を走行しているかを識別する様子を示す概念図、及び複数の車線を有する道路上での走行車線を識別する様子を示す概念図である。都市部では、図6(a)に示すように、多くの道路が高架となっており、この高架の上側にある道路(高架道路)、あるいは高架の下側の道路(上に高架道路が存在する一般道路)を走行するそれぞれの車両400−1、400−2がどちらの道路を走行しているかを、位置精度の誤差が(数十m程度と)大きいGPSによる位置情報だけでは特定することが難しい。特に、高架の下側の道路(上に高架道路がある一般道路)では、GPS衛星からの電波を受信し難く、Galileo併用受信するものでも、誤差を改善したDGPSでも現在位置を特定できない恐れがある。
【0047】
そこで、それぞれの道路にあるマンホール300−1、300−2(順に高架の上側の高架道路とその下側の一般道路)にタグ200−1、200−2を設置しておき、それぞれの道路を走行する車両400−1、400−2に搭載されたリーダ(図示略)がそれぞれのマンホール300−1、300−2に設置されたタグ200−1、200−2からのタグ受信情報(ID)を受信することで、高架の下側の道路(高架道路の下側となる一般道路)を走行していても位置を特定することができ、また、高架の上下のどちらの道路(高架道路とその下側の一般道路)を走行しているかを高精度で識別することができる。
【0048】
また、図6(b)に示すように、複数の車線を有する道路を走行する車両の走行車線の識別するのは、位置精度の誤差が(数十m程度と)大きいGPSによる位置情報だけでは特定することが難しい。すなわち、この複数の車線を有する道路は、交差点の手前で、直進レーンと右折レーンとに分かれている。走行する車両が交差点の手前で直進レーンか、右折レーンにいるかを、GPSのみの位置情報で判断することは困難である。
【0049】
図6(b)に示す道路では、交差点の手前に右折レーン上のセンターライン寄りにマンホール300がある。従って、このマンホール300内にタグ200を設置すると、右折レーンを走行してくる車両のみ、そのタグ200のタグ受信情報(ID)を一定以上の信号強度レベルで受信することができる。すなわち、そのマンホール300にあるタグ200の電波を明瞭に受取れれば、車両400が右折レーンを走行しながら交差点に近づいていると、確実に判断することができる。図6(b)では、直進レーンと右折レーンとがある交差点の手前で、走行車線を判断するものであったが、同様に高速道路でのジャンクション(分岐)手前の車線の選択にも応用でき、またインターチェンジの手前にて高速道路から一般道へ向かう出口レーンか/そのまま高速道路を進む走行レーンかどちらを車両が走行しているのかという車線の判断などにも用いることができる。
【0050】
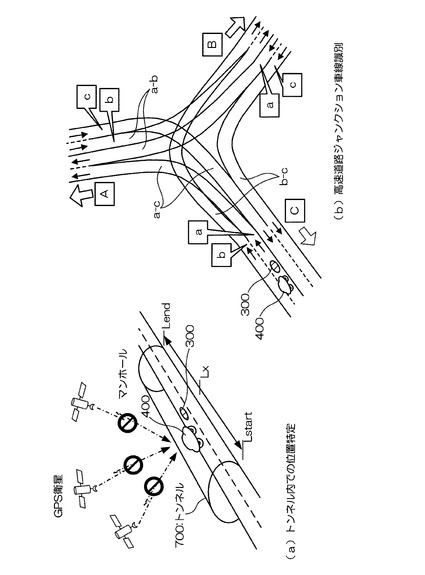
次に、図7(a)、(b)は、各々、道路を走行する車両がトンネル内へ入った場合に車両の正確な現在位置を識別する様子を示す概念図、及び高速道路のジャンクションにおける走行車線を識別する様子を示す概念図である。図7(a)に示すように、道路を走行する車両400がトンネル700内へ入る場合がある。従来、カーナビにおいては、トンネル700内を走行する車両400の現在位置Lxの特定は、トンネル700の入り口Lstartから走行距離により地図情報に当てはめて求めている。その後、トンネル700の出口Lendを通り過ぎると、GPSによる現在位置の特定を再開する。すなわち、トンネル700内では、GPSによる現在位置の特定は原理的にできない。したがって、トンネル700内を走行する車両400の現在位置を、上述したようにマンホール300に設置したタグ200の電波を用いて特定することは非常に有効である。
【0051】
そこで、本第1実施形態では、トンネル700内にあるマンホール300にタグ(図示略、図1のタグ200に相当)を設置し、このタグ200からのタグ受信情報(ID)を受信することで、タグ200の設置場所(経度、緯度)で車両400の現在位置を補正すると(トンネル700内では、タグ200の設置場所を現在位置とする)、トンネル入り口Lstartから出口Lendまでの間で、トンネル700内を走行する車両の現在位置Lxの精度を確実に向上させることができる。
【0052】
また、図7(b)に示すように、複数の車線を有する高速道路が立体交差するジャンクションにおいても、GPSのみの位置情報で車両が走行する車線を特定することは困難である。図7(b)には、A、B、Cで示す3方向を結ぶ高速道路が立体交差するジャンクションを示している。それぞれの方向A、B、Cにおいて、上り下りへの向きへそれぞれ2車線a−b、a−c、b−cを有する。走行車線上の矢印は、車両の走行方向を示している。
【0053】
すなわち、方向Aからジャンクションに進入する場合、方向Bへ行く場合には、走行車線bを選択し、方向Cに行く場合には、走行車線cを選択する必要がある。また、方向Bからジャンクションに進入する場合、方向Aへ行く場合には、走行車線aを選択し、方向Cに行く場合には、走行車線cを選択する必要がある。同様に、方向Cからジャンクションに進入する場合、方向Aへ行く場合には、走行車線aを選択し、方向Bに行く場合には、走行車線bを選択する必要がある。図示の例では、車両400が方向Cからジャンクションに進入する場合について示している。
【0054】
方向Cからジャンクションへ走行する車両400は、目的の方向A、または方向Bに応じて、走行車線a、bのいずれかを選択する必要がある。運転手は、ジャンクション手前の標識や、カーナビの表示などを見て、走行車線を決める。本第1実施形態では、マンホール300に設置したタグ(図示略、図1のタグ200に相当)からのタグ受信情報(ID)を受信することで、走行車両400の現在位置を特定するので、走行車両が走行車線a、bのいずれを走行しているかを識別することができる。
【0055】
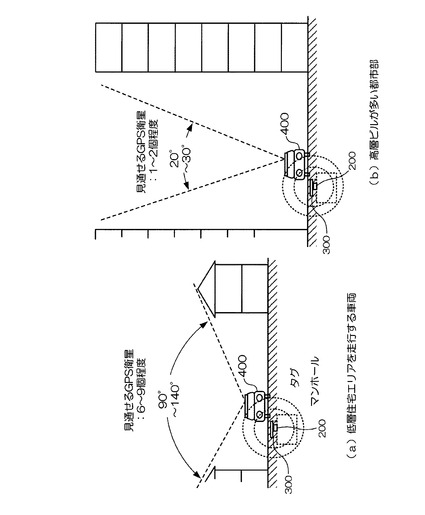
次に、図8(a)、(b)は、本第1実施形態において、低層住宅エリアと高層ビルが多い都市部とで車両の現在位置を特定する場合について説明するための概念図である。本第1実施形態によるタグ200からのタグ受信情報(ID)によって現在位置の精度を向上させる事例において、走行する車両の周囲環境が異なる状況ものとして、低層住宅エリアと高層ビルが多い都市部とがある。
【0056】
図8(a)に示すように、低層住宅エリアにおいては、走行する車両400から上空を見渡すと、90°〜140°と比較的広い範囲で空が開けている。このため、地球を回る全24個のGPS衛星の内で、常に6〜9個程度のGPS衛星からの電波を、直接、該車両400で受信することができ、4個以上のGPS衛星の情報があれば、現在位置を特定することができる。
【0057】
しかしながら、GPSによる場所を特定する精度は低く、場合により100m程度の誤差がある。この誤差を、Galileo衛星を併用しても大幅に改善することは難しい。また、前述した固定基準局(灯台ビーコン)を用いるDGPSは、10m程度の誤差で現在位置を特定することができ、10倍以上での精度を向上できるものの、人口密度が低い低層住宅エリアなどに対して、固定基準局(灯台ビーコン)を建設することは、費用対効果が小さく期待できない。
【0058】
そこで、上述したように、本第1実施形態では、既存の通信設備としてあるマンホール300にタグ200を設置し、該タグ200からのタグ受信情報(ID)を、走行する車両400に搭載したリーダ500により受信し、カーナビ600で車両の現在位置を特定することで、GPSのみに比べ、より高精度(数m以内)で、また、DGPSに比べ、より安価に実現することができる。
【0059】
この低層住宅エリアに対して、図8(b)に示す高層ビルが多い都市部では、走行中の車両400から、20°〜30°と比較的狭い範囲でしか上空を見渡せない。従って、地球を周回する全24個の衛星の内、1〜2個程度のGPS衛星からしか直接電波を受信できず、現在位置を特定することができない(3次元空間の場合で現在位置を特定するために必要とされるGPS衛星の数は4個以上であり、2次元平面上で現在位置を特定するためには、3個以上のGPS衛星の情報が必要になる)。
【0060】
そこで、上述したように、本第1実施形態では、既存の通信設備としてあるマンホール300にタグ200を設置する。都市部では、通信設備の多くは、地中に埋設されており、該通信設備のメンテナンス等のために、マンホール300は多くの道路に存在する。ゆえに、高層ビルが多い都市部であっても、マンホール300に設置したタグ200からのタグ受信情報(ID)を、走行する車両400に搭載したリーダ500により受信することで、カーナビ600で車両の現在位置を数m以内の高精度で特定することができる。
【0061】
上述した本第1実施形態によれば、マンホール300に設置したタグ200からのタグ受信情報(ID)を、あたかも位置を知らせるマーカとして、カーナビ600が特定する現在位置の精度向上に用いる場合には、あくまでもGPS機能部604による位置特定機能を補完することであるので、タグ200の読み取り率は100%ではなくてもよい。ちなみに、GPSを用いて求められる位置精度としては、カーナビ600では、通常、十数m〜数十m(場合によっては100m)の誤差があるとされている。これに対して、マンホール300に設置したタグ200からのタグ受信情報(ID)をマーカとして用いた場合には、数m(通常で5〜7m、電波の受信レベルに限定を設ければ2〜3m程度)の位置精度が実現可能である。従って、GPSでは、不十分な位置精度をマンホール300に設置したタグ200からのタグ受信情報(ID)を受信して十分に補正することができる。
【0062】
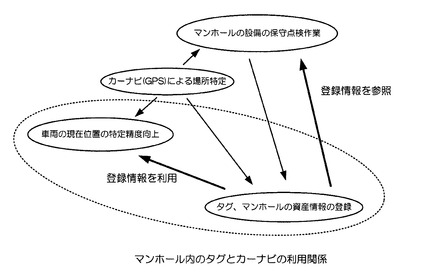
なお、本第1実施形態において、カーナビ600に新たに追加する機能のうち、登録タグ情報記憶部(ID、場所)602の登録タグ情報については、後述する第3実施形態における通信設備の資産登録/補正方法で詳細に説明する。すなわち、図9に示すように、本第1実施形態で説明した車両400の現在位置を特定する精度向上においては、後述する第3実施形態に述べるタグ200、マンホール300の資産情報(設置場所)の登録で作られた登録情報を利用して実現される。
【0063】
B.第2実施形態
次に、本発明の第2実施形態について説明する。
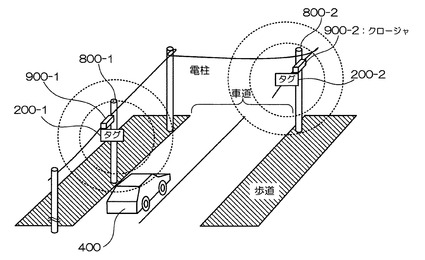
図10は、本発明の第2実施形態による車両位置特定システムの構成を示すブロック図である。なお、図1に対応する部分には同一の符号を付けて説明する。図において、本第2実施形態では、車両400に現在位置を特定する際の位置精度を向上させるために、道路に沿って敷設された電柱800−1、800−2にタグ200−1、200−2を設置し、車両400に搭載されたリーダ500によりタグ200−1、200−2からタグ受信情報(ID)を受信し、カーナビ600により、該タグ200−1、200−2の設置場所(経度、緯度)から車両400の現在位置を特定する。
【0064】
図10に示すように、タグ200−1、200−2は、電柱800−1、800−2に設置される。あるいは、電柱に代えて、通信用線を結線・分岐するクロージャ900−1、900−2であってもよい。そして、道路を走行する車両400にタグ200−1、200−2からのタグ受信情報(ID)を受信するリーダ500、車両の現在位置を特定し、地図情報を提供するカーナビ600を搭載する。電柱800−1、800−2は、道路に沿って歩道の端、あるいは路肩に立てられており、この電柱800−1、800−2の高い箇所にタグ200−1、200−2を設置しておく。この道路を走行する車両400に搭載したリーダ500は、車両400がその電柱800−1、800−2に近づくと、そのタグ200−1、200−2からのタグ受信情報(ID)を受信する。
【0065】
また、通信線用のクロージャ900−1、900−2は、電柱2本毎に1箇所あり、このクロージャ900−1、900−2にタグ200−1、200−2を設置した場合でも、同様に、走行する車両400に搭載したリーダ500が、車両400の接近により、タグ200−1、200−2からのタグ受信情報(ID)を受信する。
【0066】
タグ200−1、200−2を設置した電柱800−1、800−2、あるいはクロージャ900−1、900−2の設置場所は、予め登録されており、そのタグ200−1、200−2のIDと設置場所とを1組とし、多くの登録タグ情報が車両400に搭載したカーナビ600の登録タグ情報記憶部602に記憶されている。カーナビ600は、車両400に搭載したリーダ500が受信したタグ200−1、200−2のIDに基づいて、そのタグ200−1、200−2の設置されている設置場所(経度、緯度)を認識することができるので、車両の現在位置を高精度で特定することができる。
【0067】
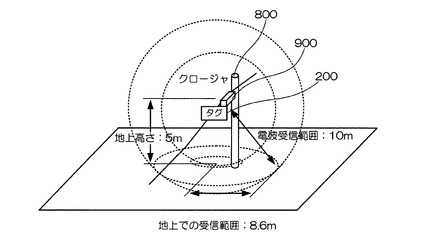
図11は、本第2実施形態において、電柱に設置されたタグからの電波受信可能な範囲を示す概念図である。電柱に設置されたタグ200からの電波受信可能な範囲について考える。図11に示す電柱800、あるいはクロージャ900の高さは、5mであると仮定する。そして、この電柱800、あるいはクロージャ900に設置したタグ200からの電波の受信範囲を、およそ10mとする。このような条件を想定した場合、地上での受信範囲は、8.6mとなる。車両400の大きさが4〜5mであるので、車2台分の範囲を網羅することができることになる。この現在位置の特定の精度は、場合によって100mもあるGPSの誤差と比較すると非常に高く、また、GPSの10倍とされ、10m程度の誤差を有するDGPSと比べても、さらに良いことになる。
【0068】
なお、走行する車線の判断など、さらに位置を高い精度で求める必要がある場合には、タグ200の電波を受信するリーダ500での受信レベルを制限することが考えられる。例えば、タグ200からの電波の受信レベルの強度に閾値を設け、位置を特定する精度を4m以下とすることも実現できる(図11でタグ200を囲む2つの破線円の内側に示す)。また、ここまで電柱800、あるいはクロージャ900に設置したタグ200の電波の受信範囲を、およそ10mと仮定したが、例えば、20mであるなら、先と同じように、リーダ500での受信レベルの強度を制限することで、位置を特定する精度を調整できる。
【0069】
電柱800、及び通信線用のクロージャ900は、数年おきに保守確認点検が実施され、また、通信線の工事によりその都度作業が行われることがある。このような保守点検や、工事作業の際に、タグ200を設置しておくことで、その後、車両400の現在位置の特定の精度向上に活用できることは大変効果的である。本第2実施形態でのタグ200を設置する対象としている電柱800、及び通信線用のクロージャ900の数は、先に挙げた第1実施形態でのマンホールの数と比較すると、数十倍以上と多い。そして、特に電柱800、及び通信線用のクロージャ900は、低層住宅エリアに多く、このような低層住宅エリアでは、GPSによる現在位置の特定が可能なものの、走行車線の識別には、不十分であるので、本第2実施形態による車両の現在位置の特定精度を向上させることにより好適である。
【0070】
C.第3実施形態
次に、本発明の第3実施形態について説明する。
上述したように、本第1、第2実施形態では、マンホール300、電柱800、クロージャ900にタグ200を設置し、走行している車両400のリーダ500によって、タグ200からのタグ受信情報(ID)を受信し、カーナビ600で、タグ200の設置場所、GPSによる現在位置を地図情報上に表示して提示することを特徴としている。このような構成において、マンホール300、電柱800、クロージャ900にタグ200に新たにタグ200を設置する場合には、タグ200の設置場所を、車両400に搭載されたカーナビ600の登録タグ情報記憶部602に、登録タグ情報(ID、設置場所:経度、緯度)として登録する必要がある。また、既に設置されたタグ200の登録タグ情報(ID、設置場所:経度、緯度)を更新(補正)する必要もある。
【0071】
以下では、マンホール300内に新たにタグ200を設置した場合に、該タグ200の登録タグ情報(ID、設置場所:経度、緯度)をカーナビ600の登録タグ情報記憶部602に登録する方法について説明する。
【0072】
図12は、本第3実施形態による、通信設備(タグ)の資産情報の登録方法を説明するためブロック図である。なお、図1に対応する部分には同一の符号を付けて説明を省略する。図において、車両400は、登録(または更新)しようとするタグ200が設置されているマンホール300上(タグ200と通信可能範囲であれば可)に一時停止する。この状態において、車両400に搭載されたリーダ500は、マンホール300内に設置されたタグ200からタグ受信情報(ID)を読み取り、カーナビ600に供給する。カーナビ600では、タグ受信情報(ID)を取り込み、位置特定部603に供給する。
【0073】
位置特定部603は、タグ受信情報取り込み部601から供給されるタグ受信情報(ID)と、登録タグ情報記憶部602に記憶されている登録タグ情報(のID)とを照合し、対応するタグ200のIDが登録タグ情報記憶部602に記憶されているか否かを判定する。そして、対応するタグ200のIDが登録タグ情報記憶部602に記憶されていない場合には、新規のタグ200であるので、登録タグ情報記憶部602にタグ200のIDを登録する。一方、対応するタグ200のIDが登録タグ情報記憶部602に既に存在する場合には、設置場所の更新(または補正)であるので、ここでは、対応するタグ200のIDを特定しておく。
【0074】
一方、GPS機能部604は、複数のGPS衛星のそれぞれからの距離を計測し、現在位置(経度、緯度)を特定し、地図情報機能部605に供給する。地図情報機能部605は、GPS機能部604から供給される現在位置に基づく地図情報(道路の位置など)を位置特定部603に供給する。位置特定部603は、GPS機能部604によって取得された現在位置と地図情報(道路の位置など)とに従って、特定したタグ200の設置場所(緯度、経度)を特定し、該タグ200のIDに対応付けて、登録タグ情報記憶部602の登録タグ情報(の設置場所)として登録(または更新、補正)する。
【0075】
以上のような一連の手順により、車両が走行する車線側に存在するマンホール300、あるいは電柱800、あるいは通信線用のクロージャ900に設置したタグ200の登録タグ情報を容易に登録、更新、補正することができる。
【0076】
ところで、図3に示すような道路では、反対車線や、歩道にもマンホール300−2、300−3があり、あるいは図10に示す道路にも、反対車線側に電柱800−2がある。これらのマンホール300−2、300−3に設置したタグ200−2、200−3(図3)、あるいは電柱800−2、ないし通信線用のクロージャ900−2に設置したタグ200−2(図10)の電波は、車両400が走行する車線でも受信できてしまう。このように、車両400が走行する車線とは違うが、タグ200−2、200−3が設置されたマンホール300−2、300−3(図3に示されているように反対車線や、歩道に当たる所)、あるいはタグ200−2が設置された電柱800−2、ないし通信線用のクロージャ900−2(図10に示した正確には反対車線側に当たる所)が、電波を受信できる範囲内の近傍にある場合には、位置情報の登録には注意を要する。
【0077】
すなわち、このようなマンホール300−2、300−3に設置したタグ200−2、200−3(図3)、あるいは電柱800−2、ないし通信線用のクロージャ900−2に設置したタグ200−2(図10)からの電波においては、リーダ500での受信レベルに制約を設けるようにする。この受信レベルの制約によって、図3における反対車線や、歩道にあるマンホール300−2、300−3に設置したタグ200−2、200−3を、走行車線にあるマンホール300−1に設置されたタグ200−1と区別できるようにしておく(図3に示すタグを囲む2つの破線円の内側の円を受信範囲とする)。あるいは、図10における反対車線にある電柱800−2、ないし通信線用のクロージャ900−2に設置されたタグ200−2を、走行車線にある電柱800−1、ないし通信線用のクロージャ900−1に設置されたタグ200−1と区別できるようにしておく(図11に示すタグを囲む2つの破線円の内側の円を受信範囲とする)。
【0078】
そして、反対車線や、歩道にあるマンホール300−2、300−3(図3)、あるいは反対車線にある電柱800−2、ないし通信線用のクロージャ900−2(図10)の設備資産の登録に際しては、正確なデータ登録/補正を行うには、車両400を道路脇(路肩)に一旦停止させるなどして、それらの対象となるマンホール300−2、300−3、あるいは電柱800−2、ないし通信線用のクロージャ900−2の場所が停止させた車両400からどの方向にそれだけずれているかの情報を的確に把握する必要がある。
【0079】
このように、正確にタグ200の設置場所を登録しておけば、より正確に、現況調査にも、カーナビ600による車両400の位置精度向上のいずれにも役立つ。つまり、図5に示すように、本第3実施形態で説明した、タグ200の設置場所を登録した登録タグ情報を参照すれば、前述した第1、第2実施形態で述べたように、車両400の現在位置を高精度で特定することができる。
【0080】
上述した第1から第3実施形態によれば、車両の近傍に敷設されている通信設備に設置された無線タグから読み取った識別情報に基づいて当該無線タグの設置場所を特定することにより、衛星が見渡せない場所であっても車両の現在位置を特定することができ、かつ、車両の現在位置の特定精度を向上させることができる。例えば、カーナビのGPSでは、測位が困難な高層ビルが多い都市部や、高架道路の下側道路、トンネル内などを走行している場合でも、車両の現在位置を特定することができる。また、高架道路とその下側の道路の区別、交差点前の直進と右折レーンの認識、高速道路のジャンクションで選択された車線を特定することができる。
【符号の説明】
【0081】
200、200−1〜200−3 タグ
201 アンテナ
202 無線回路
203 ピックマイコン
204 コイン電池
205 電池ホルダ
206 プリント基板
300、300−1〜300−n マンホール
400、400−1、400−2 車両
500 リーダ
600 カーナビ
601 タグ受信情報取り込み部
602 登録タグ情報記憶部
603 位置特定部
604 GPS機能部
605 地図情報機能部
606 表示機能部
700 トンネル
800、800−1、800−2 電柱
900、900−1、900−2 クロージャ
【技術分野】
【0001】
本発明は、自動車などの車両の位置を地図上に提示する車両位置提示方法、及びカーナビゲーション装置に関する。
【背景技術】
【0002】
カーナビゲーションシステム(以下、カーナビという)で車両の位置を特定するGPS(Global Positioning System:全地球測位システム)は、複数のGPS衛星のそれぞれからの距離を計測し、車両の位置を特定するシステムである。この特定精度を向上する従来技術としては、衛星測位用信号受信装置(GPS衛星測位用信号と同種のGalileo衛星測位用信号とを併用して受信する装置、以下“Galileo併用受信装置”という)が知られている(例えば、特許文献1参照)。
【0003】
図13は、従来技術によるGalileo併用受信装置の構成を示すブロック図である。図において、Galileo併用受信装置は、アンテナ11、アンプ部21、基準水晶発信器51、デジタル処理部81、操作受付部91を備え、ミキサ部31、32、IFアンプ部61、62、IFフィルタ部71、72、局部発信器41、42については、2系統備える構成である。該Galileo併用受信装置において、2系統備えた構成の一方でGPS衛星の測位用信号を受信し、他方でGalileo衛星測位用信号を受信する。1つしかない構成要素は、GPSとGalileoと双方で測位用信号受信に共用使用する。このように、GPS衛星の測位用信号とGalileo衛星測位用信号とを用いることにより、特定位置の精度を向上させている。
【0004】
また、他の従来技術として、GPSにより特定する位置の誤差を改善(精度を向上)するDGPS(ディファレンシャルGPS)を用いた技術が知られている(例えば、非特許文献1)。図14は、従来技術によるDGPSを用いたシステム構成を示すブロック図である。図において、当該システムではDGPS補正局100や、灯台ビーコン101など(いずれも固定局)で、GPS受信装置102、103よって測定された位置情報(緯度と経度)を、正確な位置情報(緯度と緯度)と比べて、その差分となる補正データ(FM補正データ、ビーコン補正データ)を、車両側のGPS受信装置104に送信する。この補正データのユーザへの送信には、FM波を用いる。車両側のGPS受信装置104では、受信した補正データを用いて、自身で測定した位置情報(緯度と経度)を補正する。そして、カーナビ105などの地図表示において、自身の位置を特定する精度を向上させている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2005−207888号公報
【非特許文献】
【0006】
【非特許文献1】“IMT−2000時代の位置情報ビジネス,”INTERNET magazine,pp.234−pp.248,2000/6.
【発明の概要】
【発明が解決しようとする課題】
【0007】
ところで、カーナビの位置特定に用いるGPSが有効に機能しない環境として、衛星が見渡せない高層ビルが多い都市部や、高架道路の下側道路、トンネル内などがある。例えば、高層ビルの谷間を走行する車両においては、空を見渡せる範囲が20°〜30°しかなく、地球を回る全GPS衛星の個数が24個であるので、単純に計算すると、その内の1〜2個のGPS衛星しか見通せない。GPS受信装置では、位置を特定するために最低4個(これは3次元空間の場合であり、2次元平面上で場所を特定する場合でも最低3個)の衛星が必要であるので、GPS衛星を用いた測位はできないという問題がある。
【0008】
また、Galileo衛星を活用しても同様に場所の特定は不可能であり、さらに、GPSでの測位精度を向上させる固定基準局、灯台ビーコンからの電波も受信しても、位置の特定自体が無理であり、有効に機能しないという問題がある。
【0009】
また、高架下を走行する車両においては、GPS衛星(あるいは、Galileo衛星や、固定基準局、灯台ビーコン)からの電波による情報を受信し難い。従って、車両の位置を特定することができなかったり、その特定した位置の精度が不十分であったりするという問題があった。
【0010】
また、トンネル内を走行する車両においても、トンネル内の車両は、GPS衛星や、Galileo衛星はもちろん固定基準局、灯台ビーコンからの電波も受信し難い。この場合も、当然、これらの情報からその車両の位置を特定することができないという問題があった。
【0011】
カーナビにおいては、高架道路の上下の区別や、交差点前の直進と右折レーンの認識、高速道路のジャンクションでの車線選択などができる程度に自身の位置を特定する精度が実現できると便利である。しかしながら、非特許文献1の240頁に記載されているように、「現在のところ、民間利用では、位置測位精度が常に100m程度の誤差を含んでいる」、「日本国内では、DGPSという誤差を補正するタイプの新しいGPSシステムによって、従来の衛星からの直接受信によるGPSに比べて、位置測定の精度が約10倍に向上」とあるように、上述した目標を達成するための位置精度(数m)を得るには、まだ不十分である。
【0012】
本発明は、このような事情を考慮してなされたものであり、その目的は、衛星が見渡せない場所であっても車両の位置を特定することができ、かつ、車両の位置の特定精度を向上させることができる車両位置提示方法、及びカーナビゲーション装置を提供することにある。
【課題を解決するための手段】
【0013】
上述した課題を解決するために、本発明は、車両の位置を提示する車両位置提示方法であって、前記車両の近傍に敷設されている通信設備に設置された無線タグから前記車両に搭載された読取装置により前記無線タグの識別情報を読み取るステップと、無線タグの識別情報と設置場所とが関連付けて予め記憶されている登録タグ情報記憶部から、前記読み取った無線タグの識別情報に対応付けられている設置場所を読み出して、前記無線タグの設置場所を特定するステップと、前記特定した無線タグの設置場所を提示するステップとを含むことを特徴とする車両位置提示方法である。
【0014】
本発明は、上記の発明において、前記車両に搭載されたGPS機能部により位置情報を取得するステップ、を含み、前記特定した無線タグの設置場所を提示するステップにおいて、前記特定した無線タグの設置場所を地図情報上に提示するとともに、前記GPS機能部により取得した位置情報を前記地図情報上に提示することを特徴とする。
【0015】
本発明は、上記の発明において、前記読取装置により前記無線タグの識別情報が読み取られた場所で前記GPS機能部により位置情報を取得するステップと、前記GPS機能部により取得した位置情報と、該位置情報に対応する地図情報とに基づいて、前記無線タグの設置場所を特定するステップと、前記無線タグの識別情報と前記特定した無線タグの設置場所とを対応付けて前記登録タグ情報記憶部に登録するステップとを含むことを特徴とする。
【0016】
本発明は、上記の発明において、前記通信設備は、道路上に敷設されているマンホール、または電柱であることを特徴とする。
【0017】
本発明は、上記の発明において、前記車両に搭載された読取装置により前記無線タグの識別情報を読み取る際、最も近傍に存在する無線タグの識別情報を読み取るために、前記読取装置の受信感度を調整するステップを更に含むことを特徴とする。
【0018】
また、上述した課題を解決するために、本発明は、車両の位置を提示するカーナビゲーション装置であって、前記車両の近傍に敷設されている通信設備に設置された無線タグの識別情報を読み取る読取手段と、無線タグの識別情報と無線タグの設置場所とを対応付けて予め記憶する登録タグ情報記憶手段と、前記登録タグ情報記憶手段から、前記読取手段により読み取った無線タグの識別情報に関連付けられている設置場所を読み出して、前記無線タグの設置場所を特定する位置特定手段と、前記位置特定手段により特定された前記無線タグの設置場所を提示する提示手段とを備えることを特徴とするカーナビゲーション装置である。
【0019】
本発明は、上記の発明において、前記車両に搭載され、位置情報を取得するGPS機能手段を更に備え、前記提示手段は、前記特定した無線タグの設置場所を提示する際、前記特定した無線タグの設置場所を地図情報上に提示するとともに、前記GPS機能手段により取得した位置情報を前記地図情報上に提示することを特徴とする。
【0020】
本発明は、上記の発明において、前記GPS機能手段は、前記読取手段により前記無線タグの識別情報が読み取られた場所で位置情報を取得し、前記位置特定手段は、前記GPS機能部により取得した位置情報と、該位置情報に対応する地図情報とに基づいて、前記読取手段により読み取られた前記無線タグの設置場所を特定し、前記無線タグの識別情報と前記位置特定手段により特定された前記無線タグの設置場所とを対応付けて前記登録タグ情報記憶手段に記憶することを特徴とする。
【0021】
本発明は、上記の発明において、前記通信設備は、道路上に敷設されているマンホール、または電柱であることを特徴とする。
【0022】
本発明は、上記の発明において、前記読取手段は、前記無線タグの識別情報を読み取る際、自身の受信感度を調整し、最も近傍に存在する無線タグの識別情報を読み取ることを特徴とする。
【発明の効果】
【0023】
この発明によれば、車両の近傍に敷設されている通信設備に設置された無線タグから読み取った識別情報に基づいて当該無線タグの設置場所を特定することにより、衛星が見渡せない場所であっても車両の現在位置を特定することができ、かつ、車両の現在位置の特定精度を向上させることができる。
【図面の簡単な説明】
【0024】
【図1】本発明の第1実施形態による車両位置特定システムの構成を示すブロック図である。
【図2】本第1実施形態によるタグの構成を示す斜視図である。
【図3】本第1実施形態において、走行する車両と道路にあるマンホールとの関係について説明する図である。
【図4】本第1実施形態による、タグの登録タグ情報の一例を示す概念図である。
【図5】本第1実施形態において、カーナビ600での地図情報の表示例を示す概念図である。
【図6】本第1実施形態において、車両が走行する様々な状況で高精度な現在位置を取得する様子を示す概念図である。
【図7】本第1実施形態において、車両が走行する様々な状況で高精度な現在位置を取得する様子を示す概念図である。
【図8】本第1実施形態において、車両が走行する様々な状況で高精度な現在位置を取得する様子を示す概念図である。
【図9】本第1実施形態において、マンホールのタグとカーナビの利用関係を示す概念図である。
【図10】本発明の第2実施形態による車両位置特定システムの構成を示すブロック図である。
【図11】本第2実施形態において、電柱に設置されたタグからの電波受信可能な範囲を示す概念図である。
【図12】本第3実施形態による、通信設備(タグ)の資産情報の登録方法を説明するためブロック図である。
【図13】従来技術によるGalileo併用受信装置の構成を示すブロック図である。
【図14】従来技術によるDGPSを用いたシステム構成を示すブロック図である。
【発明を実施するための形態】
【0025】
以下、本発明の一実施形態を、図面を参照して説明する。
【0026】
A.第1実施形態
図1は、本発明の第1実施形態による車両位置特定システムの構成を示すブロック図である。図において、無線タグ(ICタグ、電子タグ、RFタグ、RFID:Redio Frequency Identificationとも言われる。以下、タグという)200は、各所に設けられたマンホール300内に設置され、車道を走行する車両400に搭載された読取装置(読取装置、質問器、タグ受信機とも言われる。以下、リーダという)500に対して、タグ200を識別するためのタグ受信情報(ID)を送信する。リーダ500は、マンホール300内に設置されたタグ200からタグ受信情報(ID)を読み取り、カーナビ600に供給する。
【0027】
カーナビ600は、車両400に搭載されており、既存のGPS機能部604や、地図情報機能部605、表示機能部606などに加え、タグ受信情報取り込み部601、登録タグ情報記憶部602、位置特定部603を備えている。タグ受信情報取り込み部601は、リーダ500からのタグ受信情報(ID)の取り込むインタフェースとして機能し、取り込んだタグ受信情報(ID)を位置特定部603に供給する。
【0028】
登録タグ情報記憶部602は、車道の各所に設けられたマンホール300内に設置された複数のタグ200(図では1つ)に対して、登録タグ情報(ID、設置場所:経度、緯度)を予め保持している。なお、登録タグ情報のデータ構成ついては後述する。また、該登録タグ情報は、タグ200を設置した場合に新たに登録されたり、適宜、補正、更新されたりするが、この詳細については後述する第3実施形態で説明する。位置特定部603は、タグ受信情報取り込み部601から供給されるタグ受信情報(ID)と登録タグ情報記憶部602に記憶されている登録タグ情報(のID)とを照合し、対応するタグ200の設置場所(経度、緯度)を特定し、地図情報機能部605に供給する。
【0029】
GPS機能部604は、4つ以上のGPS衛星の電波を捉え、その電波の中に含む高精度の送信時刻情報を利用して、到達までに要する時間から距離を計算し、計算により得られた4つ以上の衛星からの距離から自身の現在位置(経度、緯度)を特定し、地図情報機能部605に供給する。地図情報機能部605は、位置特定部603から供給されるタグの設置場所(緯度、経度)を補正情報として、GPS機能部604から供給される現在位置(経度、緯度)とともに、地図情報上にプロットする。表示機能部606は、地図情報機能部605から供給される、タグの設置場所(緯度、経度)、GPS機能部604から供給される現在位置(経度、緯度)がプロットされた地図情報を表示する。
【0030】
図2は、本第1実施形態によるタグの構成を示す斜視図である。図において、タグ200は、電池を搭載したアクティブ型無線タグであり、アンテナ(電波放射機能)201、無線回路(送信信号生成機能)202、ピックマイコン(送信契機発生機能)203、コイン電池(電源供給機能)204から構成されている。アンテナ201は、電波による信号を送信する。無線回路202は、その送信する信号を生成する。ピックマイコン203は、送信する信号を生成して送信する指令をする。また、その指令のタイミングを決めることも行う。さらに、送信する信号に含まれるタグのID(識別子)が書き込まれており、そのIDを無線回路202に送り、信号生成をさせる。コイン電池204は、タグ200を動作させる電力を、無線回路202や、ピックマイコン203に供給する。
【0031】
また、図2には、タグ200の装置構成を実装するパーツとして電池ホルダ205と、プリント基板206とを示した。電池ホルダ205は、コイン電池204を格納する。プリント基板206上には、上述したアンテナ201以外の無線回路202、ピックマイコン203、電池ホルダ205が実装されている。
【0032】
なお、図2には、アクティブ型無線タグの構成を示したが、電池を持たないパッシブ型の無線タグであっても、走行する自動車に搭載されたリーダ500から、タグ200の情報が読めれば、その形態はどのようなものでも構わない。
【0033】
上述した構成において、車両400が車道を走行している間、該車両400に搭載されたリーダ500は、マンホール300内に設置されたタグ200からタグ受信情報(ID)を読み取り、位置特定部603は、タグ受信情報(ID)と登録タグ情報(のID)とを照合し、対応するタグの設置場所(経度、緯度)を特定する。地図情報機能部605は、この特定された設置場所(経度、緯度)と、カーナビのGPS機能部604から得られる現在位置とを地図情報に表示し、表示機能部606は、地図情報機能部605からの地図情報とともに、高精度な現在位置をユーザに提示する。
【0034】
ここで、図3は、本第1実施形態において、走行する車両と道路にあるマンホールとの関係について説明する図である。図において、車両400は、車道の一方の車線を、矢印方向を進行方向として走行している。車道、及び歩道には、マンホール300−1〜300−3が存在し、これらマンホール300−1〜300−3の各々には、タグ200−1〜200−3が設置されている。
【0035】
車両400は、近傍のマンホール(図3では、正に反対車線の測定対象となるマンホール300−2)内に設置されたタグ200−2の電波を受信できる場所(マンホール300−2の周囲に描く破線の円内が電波を受信可能な範囲、半径:約5〜7m)を走行中である。この時点で車両400に搭載したリーダ500は、その反対車線の測定対象となるマンホール300−2に設置されたタグ200−2の情報を受信することになる。
【0036】
なお、図3に示す走行車線のマンホール300−1に設置されたタグ200−1の電波は走行する車両400で当然受信できるが、同図に示すように、走行車線以外のマンホール(反対車線や、歩道のマンホール300−1、300−3)からもタグ200−1、200−3の電波が(半径約5〜7mの円内の範囲で)受信可能である。しかし、本第1実施形態では、より位置精度を向上させるために、リーダ500の受信感度を低く設定することで、走行車線のみのマンホール300−1内にあるタグ200−1の電波を捉えるようにしてもよい。これは、図3に示すマンホール300−1〜300−3の周囲に描いた破線の2つの円で小さな円内を電波の受信範囲とすればよい。
【0037】
次に、図4は、本第1実施形態による、タグの登録タグ情報の一例を示す概念図である。図において、登録タグ情報は、図4に示すように、ID(タグのID:IDentifier、識別子)と設置場所(経度、緯度)とを1組としたものである。IDは、(zzzzz…zzz)という形態のデータであり、設置場所としては、例えば、経度と緯度(xxxxx…xxx,yyyyy…yyy)という形態のデータである。ここで、x、y、zは、それぞれ数値データである。これらの組が登録している対象のマンホール数に一致する離散的な情報となっている。例えば、東京都内において数十万個の登録タグがあると仮定するならば、その同じ数十万のマンホールが存在することになる。但し、仮にマンホールに複数のタグを設置している場合は必ずしも同数とはならないが、IDと設置場所を1組とするデータ数については登録タグであり、そのデータ数はマンホールの数を上回る。
【0038】
図5は、本第1実施形態において、カーナビ600での地図情報の表示例を示す概念図である。図において、ブロックB1には、車両400が道路を走行していて、マンホール300−3に設置されたタグ(図示略)のタグ受信情報(ID)を、車両400に搭載したリーダ500が受信した時点の様子を示している。
【0039】
また、同図のブロックB1に示している例の範囲においては、道路上に、マンホール300−1、300−2、300−3、300−4、300−5があり、車両400は、マンホール300−3上を通過して走行する時点を表している。従って、車両400に搭載したリーダ(図示略)は、マンホール300−3に設置したタグ(図示略)のタグ受信情報(ID)を受信している。
【0040】
車両400のカーナビ600では、登録タグ情報記憶部602に、タグのIDと、該タグの設置場所(経度、緯度)とが対応付けて記憶されている。図示の例では、上から順に、マンホール300−1、300−2、300−3、300−4、300−5、…、300−nに設置されたタグの設置場所が記憶されている。カーナビ600は、この受信したタグのタグ受信情報(ID)に基づいて、図示の登録タグ情報を参照することにより、図5に示す登録タグ情報の斜線部に示すように、予め登録している対象となるタグ(またはマンホール、この場合、マンホール300−3)の設置場所を特定することができる。
【0041】
特に、例えば、東京都内に存在する数十万個のマンホールの登録タグ情報の中からタグ受信情報(ID)に基づいて設置場所をカーナビに表示するために、高速でタグの設置場所を特定する必要が場合もある。このため、カーナビの表示範囲(図5に示すブロックB1の範囲)に存在するマンホール300−1、300−2、300−3、300−4、300−5の登録タグ情報を参照対象として予め絞り込むことにより、この絞り込んだマンホールの登録タグ情報の中からタグ受信情報(ID)に基づいて設置場所を特定することも考えられる。
【0042】
また、図5に示すブロックB2は、カーナビ600の表示機能部606で表示される地図情報を示している。ブロックB2において、十字M1は、GPS機能部604により取得された車両400の現在位置である。GPS機能部604により取得された現在位置は、そのままでは位置精度の誤差が(数十m程度と)大きいため、破線円C1で示す広い範囲内に車両400があることしか分からない。
【0043】
ここで、先ほどマンホール300−3に設置されたタグからのタグ受信情報(ID)に基づいて、該タグ(またはマンホール)の設置場所を特定しているので、その設置場所を、地図情報上に×印M2で示している。なお、タグの設置場所の位置精度は、数m程度であるので、その範囲を含む矩形M3(先のGPS機能部604により取得された現在位置である破線円C1に比べて、この矩形M3の範囲は狭い)も表示している。このように、車両400の現在位置を、地図上に、より正確に示すことができる。
【0044】
ここでも、例えば、東京都内に存在する数十万個のマンホールの登録タグ情報の中からタグ受信情報(ID)に基づいて、走行する車両の現在の位置としてタグの設置場所をカーナビに表示するために、高速でタグの設置場所を特定する必要が場合もある。このため、GPS機能により取得された位置の表示範囲(図5に示す破線の円C1の範囲)に存在するマンホール(この図5では、たまたまマンホール300−3の1か所しかないが、数か所のマンホールが存在する場合もある)の登録タグ情報を参照対象として予め絞り込む。このように絞り込んだマンホールの登録タグ情報の中からタグ受信情報(ID)に基づいて設置場所を特定することも考えられる。
【0045】
次に、図6、図7、及び図8は、本第1実施形態において、車両が走行する様々な状況で高精度な現在位置を取得する様子を示す概念図である。
【0046】
まず、図6(a)、(b)は、各々、高架道路の上下のどちらの道路を走行しているかを識別する様子を示す概念図、及び複数の車線を有する道路上での走行車線を識別する様子を示す概念図である。都市部では、図6(a)に示すように、多くの道路が高架となっており、この高架の上側にある道路(高架道路)、あるいは高架の下側の道路(上に高架道路が存在する一般道路)を走行するそれぞれの車両400−1、400−2がどちらの道路を走行しているかを、位置精度の誤差が(数十m程度と)大きいGPSによる位置情報だけでは特定することが難しい。特に、高架の下側の道路(上に高架道路がある一般道路)では、GPS衛星からの電波を受信し難く、Galileo併用受信するものでも、誤差を改善したDGPSでも現在位置を特定できない恐れがある。
【0047】
そこで、それぞれの道路にあるマンホール300−1、300−2(順に高架の上側の高架道路とその下側の一般道路)にタグ200−1、200−2を設置しておき、それぞれの道路を走行する車両400−1、400−2に搭載されたリーダ(図示略)がそれぞれのマンホール300−1、300−2に設置されたタグ200−1、200−2からのタグ受信情報(ID)を受信することで、高架の下側の道路(高架道路の下側となる一般道路)を走行していても位置を特定することができ、また、高架の上下のどちらの道路(高架道路とその下側の一般道路)を走行しているかを高精度で識別することができる。
【0048】
また、図6(b)に示すように、複数の車線を有する道路を走行する車両の走行車線の識別するのは、位置精度の誤差が(数十m程度と)大きいGPSによる位置情報だけでは特定することが難しい。すなわち、この複数の車線を有する道路は、交差点の手前で、直進レーンと右折レーンとに分かれている。走行する車両が交差点の手前で直進レーンか、右折レーンにいるかを、GPSのみの位置情報で判断することは困難である。
【0049】
図6(b)に示す道路では、交差点の手前に右折レーン上のセンターライン寄りにマンホール300がある。従って、このマンホール300内にタグ200を設置すると、右折レーンを走行してくる車両のみ、そのタグ200のタグ受信情報(ID)を一定以上の信号強度レベルで受信することができる。すなわち、そのマンホール300にあるタグ200の電波を明瞭に受取れれば、車両400が右折レーンを走行しながら交差点に近づいていると、確実に判断することができる。図6(b)では、直進レーンと右折レーンとがある交差点の手前で、走行車線を判断するものであったが、同様に高速道路でのジャンクション(分岐)手前の車線の選択にも応用でき、またインターチェンジの手前にて高速道路から一般道へ向かう出口レーンか/そのまま高速道路を進む走行レーンかどちらを車両が走行しているのかという車線の判断などにも用いることができる。
【0050】
次に、図7(a)、(b)は、各々、道路を走行する車両がトンネル内へ入った場合に車両の正確な現在位置を識別する様子を示す概念図、及び高速道路のジャンクションにおける走行車線を識別する様子を示す概念図である。図7(a)に示すように、道路を走行する車両400がトンネル700内へ入る場合がある。従来、カーナビにおいては、トンネル700内を走行する車両400の現在位置Lxの特定は、トンネル700の入り口Lstartから走行距離により地図情報に当てはめて求めている。その後、トンネル700の出口Lendを通り過ぎると、GPSによる現在位置の特定を再開する。すなわち、トンネル700内では、GPSによる現在位置の特定は原理的にできない。したがって、トンネル700内を走行する車両400の現在位置を、上述したようにマンホール300に設置したタグ200の電波を用いて特定することは非常に有効である。
【0051】
そこで、本第1実施形態では、トンネル700内にあるマンホール300にタグ(図示略、図1のタグ200に相当)を設置し、このタグ200からのタグ受信情報(ID)を受信することで、タグ200の設置場所(経度、緯度)で車両400の現在位置を補正すると(トンネル700内では、タグ200の設置場所を現在位置とする)、トンネル入り口Lstartから出口Lendまでの間で、トンネル700内を走行する車両の現在位置Lxの精度を確実に向上させることができる。
【0052】
また、図7(b)に示すように、複数の車線を有する高速道路が立体交差するジャンクションにおいても、GPSのみの位置情報で車両が走行する車線を特定することは困難である。図7(b)には、A、B、Cで示す3方向を結ぶ高速道路が立体交差するジャンクションを示している。それぞれの方向A、B、Cにおいて、上り下りへの向きへそれぞれ2車線a−b、a−c、b−cを有する。走行車線上の矢印は、車両の走行方向を示している。
【0053】
すなわち、方向Aからジャンクションに進入する場合、方向Bへ行く場合には、走行車線bを選択し、方向Cに行く場合には、走行車線cを選択する必要がある。また、方向Bからジャンクションに進入する場合、方向Aへ行く場合には、走行車線aを選択し、方向Cに行く場合には、走行車線cを選択する必要がある。同様に、方向Cからジャンクションに進入する場合、方向Aへ行く場合には、走行車線aを選択し、方向Bに行く場合には、走行車線bを選択する必要がある。図示の例では、車両400が方向Cからジャンクションに進入する場合について示している。
【0054】
方向Cからジャンクションへ走行する車両400は、目的の方向A、または方向Bに応じて、走行車線a、bのいずれかを選択する必要がある。運転手は、ジャンクション手前の標識や、カーナビの表示などを見て、走行車線を決める。本第1実施形態では、マンホール300に設置したタグ(図示略、図1のタグ200に相当)からのタグ受信情報(ID)を受信することで、走行車両400の現在位置を特定するので、走行車両が走行車線a、bのいずれを走行しているかを識別することができる。
【0055】
次に、図8(a)、(b)は、本第1実施形態において、低層住宅エリアと高層ビルが多い都市部とで車両の現在位置を特定する場合について説明するための概念図である。本第1実施形態によるタグ200からのタグ受信情報(ID)によって現在位置の精度を向上させる事例において、走行する車両の周囲環境が異なる状況ものとして、低層住宅エリアと高層ビルが多い都市部とがある。
【0056】
図8(a)に示すように、低層住宅エリアにおいては、走行する車両400から上空を見渡すと、90°〜140°と比較的広い範囲で空が開けている。このため、地球を回る全24個のGPS衛星の内で、常に6〜9個程度のGPS衛星からの電波を、直接、該車両400で受信することができ、4個以上のGPS衛星の情報があれば、現在位置を特定することができる。
【0057】
しかしながら、GPSによる場所を特定する精度は低く、場合により100m程度の誤差がある。この誤差を、Galileo衛星を併用しても大幅に改善することは難しい。また、前述した固定基準局(灯台ビーコン)を用いるDGPSは、10m程度の誤差で現在位置を特定することができ、10倍以上での精度を向上できるものの、人口密度が低い低層住宅エリアなどに対して、固定基準局(灯台ビーコン)を建設することは、費用対効果が小さく期待できない。
【0058】
そこで、上述したように、本第1実施形態では、既存の通信設備としてあるマンホール300にタグ200を設置し、該タグ200からのタグ受信情報(ID)を、走行する車両400に搭載したリーダ500により受信し、カーナビ600で車両の現在位置を特定することで、GPSのみに比べ、より高精度(数m以内)で、また、DGPSに比べ、より安価に実現することができる。
【0059】
この低層住宅エリアに対して、図8(b)に示す高層ビルが多い都市部では、走行中の車両400から、20°〜30°と比較的狭い範囲でしか上空を見渡せない。従って、地球を周回する全24個の衛星の内、1〜2個程度のGPS衛星からしか直接電波を受信できず、現在位置を特定することができない(3次元空間の場合で現在位置を特定するために必要とされるGPS衛星の数は4個以上であり、2次元平面上で現在位置を特定するためには、3個以上のGPS衛星の情報が必要になる)。
【0060】
そこで、上述したように、本第1実施形態では、既存の通信設備としてあるマンホール300にタグ200を設置する。都市部では、通信設備の多くは、地中に埋設されており、該通信設備のメンテナンス等のために、マンホール300は多くの道路に存在する。ゆえに、高層ビルが多い都市部であっても、マンホール300に設置したタグ200からのタグ受信情報(ID)を、走行する車両400に搭載したリーダ500により受信することで、カーナビ600で車両の現在位置を数m以内の高精度で特定することができる。
【0061】
上述した本第1実施形態によれば、マンホール300に設置したタグ200からのタグ受信情報(ID)を、あたかも位置を知らせるマーカとして、カーナビ600が特定する現在位置の精度向上に用いる場合には、あくまでもGPS機能部604による位置特定機能を補完することであるので、タグ200の読み取り率は100%ではなくてもよい。ちなみに、GPSを用いて求められる位置精度としては、カーナビ600では、通常、十数m〜数十m(場合によっては100m)の誤差があるとされている。これに対して、マンホール300に設置したタグ200からのタグ受信情報(ID)をマーカとして用いた場合には、数m(通常で5〜7m、電波の受信レベルに限定を設ければ2〜3m程度)の位置精度が実現可能である。従って、GPSでは、不十分な位置精度をマンホール300に設置したタグ200からのタグ受信情報(ID)を受信して十分に補正することができる。
【0062】
なお、本第1実施形態において、カーナビ600に新たに追加する機能のうち、登録タグ情報記憶部(ID、場所)602の登録タグ情報については、後述する第3実施形態における通信設備の資産登録/補正方法で詳細に説明する。すなわち、図9に示すように、本第1実施形態で説明した車両400の現在位置を特定する精度向上においては、後述する第3実施形態に述べるタグ200、マンホール300の資産情報(設置場所)の登録で作られた登録情報を利用して実現される。
【0063】
B.第2実施形態
次に、本発明の第2実施形態について説明する。
図10は、本発明の第2実施形態による車両位置特定システムの構成を示すブロック図である。なお、図1に対応する部分には同一の符号を付けて説明する。図において、本第2実施形態では、車両400に現在位置を特定する際の位置精度を向上させるために、道路に沿って敷設された電柱800−1、800−2にタグ200−1、200−2を設置し、車両400に搭載されたリーダ500によりタグ200−1、200−2からタグ受信情報(ID)を受信し、カーナビ600により、該タグ200−1、200−2の設置場所(経度、緯度)から車両400の現在位置を特定する。
【0064】
図10に示すように、タグ200−1、200−2は、電柱800−1、800−2に設置される。あるいは、電柱に代えて、通信用線を結線・分岐するクロージャ900−1、900−2であってもよい。そして、道路を走行する車両400にタグ200−1、200−2からのタグ受信情報(ID)を受信するリーダ500、車両の現在位置を特定し、地図情報を提供するカーナビ600を搭載する。電柱800−1、800−2は、道路に沿って歩道の端、あるいは路肩に立てられており、この電柱800−1、800−2の高い箇所にタグ200−1、200−2を設置しておく。この道路を走行する車両400に搭載したリーダ500は、車両400がその電柱800−1、800−2に近づくと、そのタグ200−1、200−2からのタグ受信情報(ID)を受信する。
【0065】
また、通信線用のクロージャ900−1、900−2は、電柱2本毎に1箇所あり、このクロージャ900−1、900−2にタグ200−1、200−2を設置した場合でも、同様に、走行する車両400に搭載したリーダ500が、車両400の接近により、タグ200−1、200−2からのタグ受信情報(ID)を受信する。
【0066】
タグ200−1、200−2を設置した電柱800−1、800−2、あるいはクロージャ900−1、900−2の設置場所は、予め登録されており、そのタグ200−1、200−2のIDと設置場所とを1組とし、多くの登録タグ情報が車両400に搭載したカーナビ600の登録タグ情報記憶部602に記憶されている。カーナビ600は、車両400に搭載したリーダ500が受信したタグ200−1、200−2のIDに基づいて、そのタグ200−1、200−2の設置されている設置場所(経度、緯度)を認識することができるので、車両の現在位置を高精度で特定することができる。
【0067】
図11は、本第2実施形態において、電柱に設置されたタグからの電波受信可能な範囲を示す概念図である。電柱に設置されたタグ200からの電波受信可能な範囲について考える。図11に示す電柱800、あるいはクロージャ900の高さは、5mであると仮定する。そして、この電柱800、あるいはクロージャ900に設置したタグ200からの電波の受信範囲を、およそ10mとする。このような条件を想定した場合、地上での受信範囲は、8.6mとなる。車両400の大きさが4〜5mであるので、車2台分の範囲を網羅することができることになる。この現在位置の特定の精度は、場合によって100mもあるGPSの誤差と比較すると非常に高く、また、GPSの10倍とされ、10m程度の誤差を有するDGPSと比べても、さらに良いことになる。
【0068】
なお、走行する車線の判断など、さらに位置を高い精度で求める必要がある場合には、タグ200の電波を受信するリーダ500での受信レベルを制限することが考えられる。例えば、タグ200からの電波の受信レベルの強度に閾値を設け、位置を特定する精度を4m以下とすることも実現できる(図11でタグ200を囲む2つの破線円の内側に示す)。また、ここまで電柱800、あるいはクロージャ900に設置したタグ200の電波の受信範囲を、およそ10mと仮定したが、例えば、20mであるなら、先と同じように、リーダ500での受信レベルの強度を制限することで、位置を特定する精度を調整できる。
【0069】
電柱800、及び通信線用のクロージャ900は、数年おきに保守確認点検が実施され、また、通信線の工事によりその都度作業が行われることがある。このような保守点検や、工事作業の際に、タグ200を設置しておくことで、その後、車両400の現在位置の特定の精度向上に活用できることは大変効果的である。本第2実施形態でのタグ200を設置する対象としている電柱800、及び通信線用のクロージャ900の数は、先に挙げた第1実施形態でのマンホールの数と比較すると、数十倍以上と多い。そして、特に電柱800、及び通信線用のクロージャ900は、低層住宅エリアに多く、このような低層住宅エリアでは、GPSによる現在位置の特定が可能なものの、走行車線の識別には、不十分であるので、本第2実施形態による車両の現在位置の特定精度を向上させることにより好適である。
【0070】
C.第3実施形態
次に、本発明の第3実施形態について説明する。
上述したように、本第1、第2実施形態では、マンホール300、電柱800、クロージャ900にタグ200を設置し、走行している車両400のリーダ500によって、タグ200からのタグ受信情報(ID)を受信し、カーナビ600で、タグ200の設置場所、GPSによる現在位置を地図情報上に表示して提示することを特徴としている。このような構成において、マンホール300、電柱800、クロージャ900にタグ200に新たにタグ200を設置する場合には、タグ200の設置場所を、車両400に搭載されたカーナビ600の登録タグ情報記憶部602に、登録タグ情報(ID、設置場所:経度、緯度)として登録する必要がある。また、既に設置されたタグ200の登録タグ情報(ID、設置場所:経度、緯度)を更新(補正)する必要もある。
【0071】
以下では、マンホール300内に新たにタグ200を設置した場合に、該タグ200の登録タグ情報(ID、設置場所:経度、緯度)をカーナビ600の登録タグ情報記憶部602に登録する方法について説明する。
【0072】
図12は、本第3実施形態による、通信設備(タグ)の資産情報の登録方法を説明するためブロック図である。なお、図1に対応する部分には同一の符号を付けて説明を省略する。図において、車両400は、登録(または更新)しようとするタグ200が設置されているマンホール300上(タグ200と通信可能範囲であれば可)に一時停止する。この状態において、車両400に搭載されたリーダ500は、マンホール300内に設置されたタグ200からタグ受信情報(ID)を読み取り、カーナビ600に供給する。カーナビ600では、タグ受信情報(ID)を取り込み、位置特定部603に供給する。
【0073】
位置特定部603は、タグ受信情報取り込み部601から供給されるタグ受信情報(ID)と、登録タグ情報記憶部602に記憶されている登録タグ情報(のID)とを照合し、対応するタグ200のIDが登録タグ情報記憶部602に記憶されているか否かを判定する。そして、対応するタグ200のIDが登録タグ情報記憶部602に記憶されていない場合には、新規のタグ200であるので、登録タグ情報記憶部602にタグ200のIDを登録する。一方、対応するタグ200のIDが登録タグ情報記憶部602に既に存在する場合には、設置場所の更新(または補正)であるので、ここでは、対応するタグ200のIDを特定しておく。
【0074】
一方、GPS機能部604は、複数のGPS衛星のそれぞれからの距離を計測し、現在位置(経度、緯度)を特定し、地図情報機能部605に供給する。地図情報機能部605は、GPS機能部604から供給される現在位置に基づく地図情報(道路の位置など)を位置特定部603に供給する。位置特定部603は、GPS機能部604によって取得された現在位置と地図情報(道路の位置など)とに従って、特定したタグ200の設置場所(緯度、経度)を特定し、該タグ200のIDに対応付けて、登録タグ情報記憶部602の登録タグ情報(の設置場所)として登録(または更新、補正)する。
【0075】
以上のような一連の手順により、車両が走行する車線側に存在するマンホール300、あるいは電柱800、あるいは通信線用のクロージャ900に設置したタグ200の登録タグ情報を容易に登録、更新、補正することができる。
【0076】
ところで、図3に示すような道路では、反対車線や、歩道にもマンホール300−2、300−3があり、あるいは図10に示す道路にも、反対車線側に電柱800−2がある。これらのマンホール300−2、300−3に設置したタグ200−2、200−3(図3)、あるいは電柱800−2、ないし通信線用のクロージャ900−2に設置したタグ200−2(図10)の電波は、車両400が走行する車線でも受信できてしまう。このように、車両400が走行する車線とは違うが、タグ200−2、200−3が設置されたマンホール300−2、300−3(図3に示されているように反対車線や、歩道に当たる所)、あるいはタグ200−2が設置された電柱800−2、ないし通信線用のクロージャ900−2(図10に示した正確には反対車線側に当たる所)が、電波を受信できる範囲内の近傍にある場合には、位置情報の登録には注意を要する。
【0077】
すなわち、このようなマンホール300−2、300−3に設置したタグ200−2、200−3(図3)、あるいは電柱800−2、ないし通信線用のクロージャ900−2に設置したタグ200−2(図10)からの電波においては、リーダ500での受信レベルに制約を設けるようにする。この受信レベルの制約によって、図3における反対車線や、歩道にあるマンホール300−2、300−3に設置したタグ200−2、200−3を、走行車線にあるマンホール300−1に設置されたタグ200−1と区別できるようにしておく(図3に示すタグを囲む2つの破線円の内側の円を受信範囲とする)。あるいは、図10における反対車線にある電柱800−2、ないし通信線用のクロージャ900−2に設置されたタグ200−2を、走行車線にある電柱800−1、ないし通信線用のクロージャ900−1に設置されたタグ200−1と区別できるようにしておく(図11に示すタグを囲む2つの破線円の内側の円を受信範囲とする)。
【0078】
そして、反対車線や、歩道にあるマンホール300−2、300−3(図3)、あるいは反対車線にある電柱800−2、ないし通信線用のクロージャ900−2(図10)の設備資産の登録に際しては、正確なデータ登録/補正を行うには、車両400を道路脇(路肩)に一旦停止させるなどして、それらの対象となるマンホール300−2、300−3、あるいは電柱800−2、ないし通信線用のクロージャ900−2の場所が停止させた車両400からどの方向にそれだけずれているかの情報を的確に把握する必要がある。
【0079】
このように、正確にタグ200の設置場所を登録しておけば、より正確に、現況調査にも、カーナビ600による車両400の位置精度向上のいずれにも役立つ。つまり、図5に示すように、本第3実施形態で説明した、タグ200の設置場所を登録した登録タグ情報を参照すれば、前述した第1、第2実施形態で述べたように、車両400の現在位置を高精度で特定することができる。
【0080】
上述した第1から第3実施形態によれば、車両の近傍に敷設されている通信設備に設置された無線タグから読み取った識別情報に基づいて当該無線タグの設置場所を特定することにより、衛星が見渡せない場所であっても車両の現在位置を特定することができ、かつ、車両の現在位置の特定精度を向上させることができる。例えば、カーナビのGPSでは、測位が困難な高層ビルが多い都市部や、高架道路の下側道路、トンネル内などを走行している場合でも、車両の現在位置を特定することができる。また、高架道路とその下側の道路の区別、交差点前の直進と右折レーンの認識、高速道路のジャンクションで選択された車線を特定することができる。
【符号の説明】
【0081】
200、200−1〜200−3 タグ
201 アンテナ
202 無線回路
203 ピックマイコン
204 コイン電池
205 電池ホルダ
206 プリント基板
300、300−1〜300−n マンホール
400、400−1、400−2 車両
500 リーダ
600 カーナビ
601 タグ受信情報取り込み部
602 登録タグ情報記憶部
603 位置特定部
604 GPS機能部
605 地図情報機能部
606 表示機能部
700 トンネル
800、800−1、800−2 電柱
900、900−1、900−2 クロージャ
【特許請求の範囲】
【請求項1】
車両の位置を提示する車両位置提示方法であって、
前記車両の近傍に敷設されている通信設備に設置された無線タグから前記車両に搭載された読取装置により前記無線タグの識別情報を読み取るステップと、
無線タグの識別情報と設置場所とが関連付けて予め記憶されている登録タグ情報記憶部から、前記読み取った無線タグの識別情報に対応付けられている設置場所を読み出して、前記無線タグの設置場所を特定するステップと、
前記特定した無線タグの設置場所を提示するステップと
を含むことを特徴とする車両位置提示方法。
【請求項2】
前記車両に搭載されたGPS機能部により位置情報を取得するステップ、
を含み、
前記特定した無線タグの設置場所を提示するステップにおいて、前記特定した無線タグの設置場所を地図情報上に提示するとともに、前記GPS機能部により取得した位置情報を前記地図情報上に提示する
ことを特徴とする請求項1に記載の車両位置提示方法。
【請求項3】
前記読取装置により前記無線タグの識別情報が読み取られた場所で前記GPS機能部により位置情報を取得するステップと、
前記GPS機能部により取得した位置情報と、該位置情報に対応する地図情報とに基づいて、前記無線タグの設置場所を特定するステップと、
前記無線タグの識別情報と前記特定した無線タグの設置場所とを対応付けて前記登録タグ情報記憶部に登録するステップと
を含むことを特徴とする請求項2記載の車両位置提示方法。
【請求項4】
前記通信設備は、
道路上に敷設されているマンホール、または電柱であることを特徴とする請求項1から3のいずれかに記載の車両位置提示方法。
【請求項5】
前記車両に搭載された読取装置により前記無線タグの識別情報を読み取る際、最も近傍に存在する無線タグの識別情報を読み取るために、前記読取装置の受信感度を調整するステップを更に含むことを特徴とする請求項1から4のいずれかに記載の車両位置提示方法。
【請求項6】
車両の位置を提示するカーナビゲーション装置であって、
前記車両の近傍に敷設されている通信設備に設置された無線タグの識別情報を読み取る読取手段と、
無線タグの識別情報と無線タグの設置場所とを対応付けて予め記憶する登録タグ情報記憶手段と、
前記登録タグ情報記憶手段から、前記読取手段により読み取った無線タグの識別情報に関連付けられている設置場所を読み出して、前記無線タグの設置場所を特定する位置特定手段と、
前記位置特定手段により特定された前記無線タグの設置場所を提示する提示手段と
を備えることを特徴とするカーナビゲーション装置。
【請求項7】
前記車両に搭載され、位置情報を取得するGPS機能手段を更に備え、
前記提示手段は、
前記特定した無線タグの設置場所を提示する際、前記特定した無線タグの設置場所を地図情報上に提示するとともに、前記GPS機能手段により取得した位置情報を前記地図情報上に提示する
ことを特徴とする請求項6に記載のカーナビゲーション装置。
【請求項8】
前記GPS機能手段は、
前記読取手段により前記無線タグの識別情報が読み取られた場所で位置情報を取得し、
前記位置特定手段は、
前記GPS機能部により取得した位置情報と、該位置情報に対応する地図情報とに基づいて、前記読取手段により読み取られた前記無線タグの設置場所を特定し、前記無線タグの識別情報と前記位置特定手段により特定された前記無線タグの設置場所とを対応付けて前記登録タグ情報記憶手段に記憶する
ことを特徴とする請求項7に記載のカーナビゲーション装置。
【請求項9】
前記通信設備は、
道路上に敷設されているマンホール、または電柱であることを特徴とする請求項6から8のいずれかに記載のカーナビゲーション装置。
【請求項10】
前記読取手段は、
前記無線タグの識別情報を読み取る際、自身の受信感度を調整し、最も近傍に存在する無線タグの識別情報を読み取ることを特徴とする請求項6から9のいずれかに記載のカーナビゲーション装置。
【請求項1】
車両の位置を提示する車両位置提示方法であって、
前記車両の近傍に敷設されている通信設備に設置された無線タグから前記車両に搭載された読取装置により前記無線タグの識別情報を読み取るステップと、
無線タグの識別情報と設置場所とが関連付けて予め記憶されている登録タグ情報記憶部から、前記読み取った無線タグの識別情報に対応付けられている設置場所を読み出して、前記無線タグの設置場所を特定するステップと、
前記特定した無線タグの設置場所を提示するステップと
を含むことを特徴とする車両位置提示方法。
【請求項2】
前記車両に搭載されたGPS機能部により位置情報を取得するステップ、
を含み、
前記特定した無線タグの設置場所を提示するステップにおいて、前記特定した無線タグの設置場所を地図情報上に提示するとともに、前記GPS機能部により取得した位置情報を前記地図情報上に提示する
ことを特徴とする請求項1に記載の車両位置提示方法。
【請求項3】
前記読取装置により前記無線タグの識別情報が読み取られた場所で前記GPS機能部により位置情報を取得するステップと、
前記GPS機能部により取得した位置情報と、該位置情報に対応する地図情報とに基づいて、前記無線タグの設置場所を特定するステップと、
前記無線タグの識別情報と前記特定した無線タグの設置場所とを対応付けて前記登録タグ情報記憶部に登録するステップと
を含むことを特徴とする請求項2記載の車両位置提示方法。
【請求項4】
前記通信設備は、
道路上に敷設されているマンホール、または電柱であることを特徴とする請求項1から3のいずれかに記載の車両位置提示方法。
【請求項5】
前記車両に搭載された読取装置により前記無線タグの識別情報を読み取る際、最も近傍に存在する無線タグの識別情報を読み取るために、前記読取装置の受信感度を調整するステップを更に含むことを特徴とする請求項1から4のいずれかに記載の車両位置提示方法。
【請求項6】
車両の位置を提示するカーナビゲーション装置であって、
前記車両の近傍に敷設されている通信設備に設置された無線タグの識別情報を読み取る読取手段と、
無線タグの識別情報と無線タグの設置場所とを対応付けて予め記憶する登録タグ情報記憶手段と、
前記登録タグ情報記憶手段から、前記読取手段により読み取った無線タグの識別情報に関連付けられている設置場所を読み出して、前記無線タグの設置場所を特定する位置特定手段と、
前記位置特定手段により特定された前記無線タグの設置場所を提示する提示手段と
を備えることを特徴とするカーナビゲーション装置。
【請求項7】
前記車両に搭載され、位置情報を取得するGPS機能手段を更に備え、
前記提示手段は、
前記特定した無線タグの設置場所を提示する際、前記特定した無線タグの設置場所を地図情報上に提示するとともに、前記GPS機能手段により取得した位置情報を前記地図情報上に提示する
ことを特徴とする請求項6に記載のカーナビゲーション装置。
【請求項8】
前記GPS機能手段は、
前記読取手段により前記無線タグの識別情報が読み取られた場所で位置情報を取得し、
前記位置特定手段は、
前記GPS機能部により取得した位置情報と、該位置情報に対応する地図情報とに基づいて、前記読取手段により読み取られた前記無線タグの設置場所を特定し、前記無線タグの識別情報と前記位置特定手段により特定された前記無線タグの設置場所とを対応付けて前記登録タグ情報記憶手段に記憶する
ことを特徴とする請求項7に記載のカーナビゲーション装置。
【請求項9】
前記通信設備は、
道路上に敷設されているマンホール、または電柱であることを特徴とする請求項6から8のいずれかに記載のカーナビゲーション装置。
【請求項10】
前記読取手段は、
前記無線タグの識別情報を読み取る際、自身の受信感度を調整し、最も近傍に存在する無線タグの識別情報を読み取ることを特徴とする請求項6から9のいずれかに記載のカーナビゲーション装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】

【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2010−216955(P2010−216955A)
【公開日】平成22年9月30日(2010.9.30)
【国際特許分類】
【出願番号】特願2009−63258(P2009−63258)
【出願日】平成21年3月16日(2009.3.16)
【出願人】(000004226)日本電信電話株式会社 (13,992)
【Fターム(参考)】
【公開日】平成22年9月30日(2010.9.30)
【国際特許分類】
【出願日】平成21年3月16日(2009.3.16)
【出願人】(000004226)日本電信電話株式会社 (13,992)
【Fターム(参考)】
[ Back to top ]