
車両位置検出装置及びシステム

【課題】敷設コストを抑え、精度の高い位置検出を可能とする車両位置検出装置を提供する。
【解決手段】車両位置検出装置において、車両周辺の映像を撮影する撮像部と、撮影された映像を画像データとして取り込む入力部と、取り込まれた画像データの中から所定の形状を持つ指標を認識し、認識された指標の種類を特定する認識部と、特定された指標の種類とその指標の種類に対応する位置情報とを記憶する記憶部と、特定された指標の種類に基づき、上記記憶部から位置情報を取得する取得部と、取得された位置情報により車両の位置を決定する決定部とを備える。
【解決手段】車両位置検出装置において、車両周辺の映像を撮影する撮像部と、撮影された映像を画像データとして取り込む入力部と、取り込まれた画像データの中から所定の形状を持つ指標を認識し、認識された指標の種類を特定する認識部と、特定された指標の種類とその指標の種類に対応する位置情報とを記憶する記憶部と、特定された指標の種類に基づき、上記記憶部から位置情報を取得する取得部と、取得された位置情報により車両の位置を決定する決定部とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の走行位置を検出する装置及びシステムに関する。
【背景技術】
【0002】
近年、ミリ波レーダ、DSRC(Dedicated Short Range Communication)、画像認識などにより車の安全運転を支援する装置の開発が行われている。その中でも、車両の走行位置を検出し、その走行位置情報を利用したシステムが多く利用されている。
【0003】
このような車両位置検出手法として、道路に埋め込まれた磁気マーカを車載機器の磁気センサ等により検出し、当該磁気マーカで特定される情報から自車両の位置を検出する手法がある(特許文献1から5参照)。
【0004】
また、衛星を利用したGPS(Global Positioning System)により車両の位置を検出
する手法もある。
【0005】
その他、車載カメラで道路標示を写し、画像認識処理によって得られた情報から位置情報等が検出される手法がある。この手法では、認識された道路標示が位置情報とともに蓄積されることにより、以後、当該車両が同一地点を通行する場合に、前もって警告を行ったり、道路標示から衝突事故防止に必要な車間距離を算出し、車間距離によって警報を発生したりすることが考えられている(特許文献6及び7参照)。
【0006】
また、ミリ波レーダやレーザレーダにより前方の障害物検出や前方車両との車間距離を計測する手法も考えられている。
【特許文献1】特開平8−219775号公報
【特許文献2】特開2001−28095号公報
【特許文献3】特開平10−103984号公報
【特許文献4】特開2002−150473号公報
【特許文献5】特開2003−295950号公報
【特許文献6】特開2003−178397号公報
【特許文献7】特開平5−310058号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかしながら、例えば、DGPS(Differential GPS)の場合、位置検出精度が1メートルから5メートル程度の測定誤差があるため、交差点、道路の合流地点等の他車両が異なる方向から進入してくる可能性のある地点においては、衝突可能性を事前に判断し、回避するための手段として十分ではない。また、トンネル内やビルの陰などで衛星を必要個数補足できない場合には測定自体が不可能となる。
【0008】
また、ミリ波レーダによる測定では、前方に車両が存在する場合、道路が曲折している場合、見通しが悪い場合等には、測定が不可能となる場合がある。その他、赤外線等のレーザレーダでは、乱反射等により雨などの天候の影響を受けやすく屋外における測定には向いていない。
【0009】
また、レーンマーカに位置情報を持たせることにより位置検出も可能であるが、敷設コストが高いという問題がある。道路に設置した磁気マーカによる位置検出においても、高い精度で検出するためには磁気マーカを短い間隔で敷設しなければならないため、敷設コ
ストが高くなってしまう。
【0010】
本発明の目的は、敷設コストを抑え、精度の高い位置検出を可能とする車両位置検出装置を提供することである。
【課題を解決するための手段】
【0011】
本発明は、上述した課題を解決するために以下の構成を採用する。即ち、本発明は、車両周辺の映像を撮影する撮像部と、撮影された映像を画像データとして取り込む入力部と、 取り込まれた画像データの中から所定の形状を持つ指標を認識し、認識された指標の種類を特定する認識部と、特定された指標の種類とその指標の種類に対応する位置情報とを記憶する記憶部と、特定された指標の種類に基づき、上記記憶部から位置情報を取得する取得部と、取得された位置情報により車両の位置を決定する決定部とを備える車両位置検出装置についてのものである。
【0012】
本発明では、車両周辺の撮影された映像が入力部から取り込まれ、取り込まれた画像データから所定の形状を持つ指標が認識される。さらに、認識された指標から指標の種類が特定されると、特定された指標の種類に対応する位置情報が取得される。
【0013】
このように、本発明に係る車両位置検出装置では、画像処理により、路上等に設置され、位置を示すよう識別された指標が認識され、当該指標の種類に対応する位置情報により、車両の位置が特定される。
【0014】
従って、磁気マーカ等のように特殊で高価な機能を有する指標を用いることなく、単に、画像処理による識別可能な指標により、車両の位置を特定することが可能となる。ひいては、敷設コストを抑えた車両位置検出装置を実現することができる。
【0015】
また、当該指標と撮像部とは接近しているため、誤認識の可能性も低く、当該指標が固定されていれば、それに対応する位置情報も不変であり、精度の高い位置検出が可能となる。
【0016】
また、本発明に係る車両位置検出装置は、上記認識部が、取り込まれた画像データの中から、指標の種類を特定すると共に、認識された指標の画像データ上の位置及び大きさを認識し、上記記憶部が、指標の種類に対応する位置情報の他、その指標の大きさと、隣接する他の指標との間隔を記憶し、上記取得部が、位置情報の他、該指標の大きさと、隣接する他の指標との間隔を取得し、上記決定部が、取得された指標の大きさと隣接する他の指標との間隔に基づき、車両から、該指標までの距離を算出する算出部を更に備え、算出された該指標までの距離と当該位置情報とから車両の位置を決定する。
【0017】
本発明では、撮影された画像データに映る指標と車両との間に所定の距離がある場合が想定され、上記算出部により、認識された指標と車両との間の距離が算出される。上記算出部では、画像データ上の当該指標の位置と大きさと隣接する他の指標との間隔とから、認識された指標と車両との間の距離が算出される。
【0018】
これにより、撮像部が撮影した指標と車両との位置に一定の距離がある場合においても、その距離が算出され、同様に、車両の位置を検出することができる。
【0019】
また、本発明に係る車両位置検出装置は、上記認識部により特定された指標の種類を連続した並びで格納する格納部を更に備え、上記記憶部が、幾つか連続した指標の種類の並びと、その並びに対応する位置情報とを記憶し、上記取得部が、上記格納部に格納された指標の種類の並びに基づき、上記記憶部から、その並びに対応する上記位置情報を取得す
る。
【0020】
本発明では、格納部に、認識された指標の種類が逐次記憶される。また、上記記憶部には、当該指標の種類の並びとその並びに対応する位置情報とが格納される。これにより、本発明では、最新の認識された指標の種類を含んだ当該指標の種類の並びに基づき、車両の位置情報が決定される。
【0021】
従って、本発明によれば、指標の種類を少なくすることができ、すなわち、指標に持たせる情報量を抑えることができる。これにより、指標の認識処理の負荷を抑えることができるため、高速な車両位置検出が可能となり、ひいては、検出された位置情報が精密となる。
【0022】
また、本発明は、車両が通過する地点周辺を、所定の形状を持つ指標を少なくとも1つ含むように撮影する撮像部と、撮影された映像を画像データとして取り込む入力部と、取り込まれた画像データの中から、少なくとも1つの指標を認識し、認識された指標の種類を特定する認識部と、特定された指標の種類とその指標の種類に対応する位置情報とを記憶する記憶部と、特定された全ての指標の種類に基づき、上記記憶部から位置情報を取得する取得部と、取得された位置情報を記憶する位置記憶部と、この位置記憶部に記憶された位置情報と、上記取得部により取得された位置情報とを比較した結果、位置情報の数が一致しない場合に、上記取得部により取得された位置情報で足りない位置情報に対応する指標が認識されていないことを検知し、この認識されていない指標に関する位置情報を車両の位置と決定する決定部とを備える車両位置検出装置についてのものである。
【0023】
本発明では、撮像部が、車両が通過する地点周辺を、所定の形状を持つ指標を少なくとも1つ含むように撮影し、この映像が画像データとして取り込まれる。取り込まれた画像データに含まれる指標がそれぞれ認識され、認識された指標の種類からその種類に対応する位置情報が取得され、位置記憶部にそれぞれ記憶される。
【0024】
そして、決定部では、この位置記憶部に記憶された位置情報と、取得された位置情報とが比較されることで、認識されていない指標が検知され、当該認識されていない指標に関する位置情報が車両の位置と決定される。
【0025】
従って、本発明によれば、当該指標を用いた車両位置検出を車両外の装置で実現することができるため、交通インフラとして交通制御システム等に用いることも可能となる
また、本発明は、所定の形状を持つ指標を有する車両に搭載された装置と車両外に設置された装置とからなる車両位置検出システムについてのものである。
【0026】
このシステムにおける車両外に設置された装置は、車両が通過する地点周辺を撮影する撮像部と、撮影された映像を画像データとして取り込む入力部と、当該画像データの中から、車両に搭載され所定の形状を持つ指標を認識し、認識された指標の種類を特定する認識部と、当該指標の種類と、その指標の種類に対応する車両の識別情報とを記憶する記憶部と、特定された指標の種類に基づき、上記記憶部から車両の識別情報を取得する取得部と、取得された車両の識別情報と自装置に関する位置情報とを送信する送信部とを備える。
【0027】
また、このシステムにおける車両に搭載された装置は、上記車両外に設置された装置から送信された、車両を識別する車両識別情報と、上記車両外の設置された装置に関する位置情報とを受信する受信部と、上記車両識別情報から、受信された位置情報が自車両のための情報であると判断された場合に、当該受信された位置情報から自車両の位置を決定する決定部とを備える。
【0028】
本発明では、指標が車両に搭載され、この指標が車両外に設置された装置の撮像部により撮影される。撮影された指標が認識部により認識され、当該指標の種類に対応する車両の識別情報が取得される。取得された車両の識別情報は、車両外に設置された装置に関する位置情報と共に、送信される。
【0029】
当該車両の識別情報と位置情報とが受信されると、決定部では、これら受信された情報が自車両のための情報であるか否かが判断され、自車両のための情報であると判断されると、当該位置情報により、本車両の位置が特定される。
【0030】
従って、本発明によれば、当該指標を用いた車両の位置検出を車両と車両外に設置された装置間で情報をやりとりすることにより実現できるため、様々な形態を採用することが可能となる。
【0031】
なお、本発明は、以上の何れかの機能を実現させるプログラムであってもよい。また、本発明は、そのようなプログラムをコンピュータが読み取り可能な記憶媒体に記録してもよい。
【発明の効果】
【0032】
本発明によれば、敷設コストを抑え、精度の高い位置検出を可能とする車両位置検出装置を提供することができる。
【発明を実施するための最良の形態】
【0033】
以下、図面を参照して、それぞれ本発明の実施形態について説明する。以下に述べる実施形態の構成は例示であり、本発明は以下の実施形態の構成に限定されない。
【0034】
[第一実施形態]
まず、図面を参照して、本発明の第一実施形態における車両位置検出装置について説明する。
【0035】
図1は、第一実施形態における車両位置検出装置の概要を示す図である。本車両位置検出装置は、図1に示すように、車両に搭載されたビデオカメラ10から、道路に設置された画像マーカ15を撮影し、その撮影された画像を用いて位置検出を行う。なお、ビデオカメラ10の設置位置等は、図1に示す位置に限定されない。
【0036】
〔画像マーカ〕
画像マーカ15(本発明の指標に相当)は、磁気マーカのように磁気を備える必要はなく、例えば、図2及び3に示すような形態を認識させうるものであればよい。図2及び3は、本実施形態で用いる画像マーカの例を示す図である。本実施形態で用いる画像マーカについて、図2を用いて説明する。
【0037】
画像マーカ15は、図2に示すように、所定の形状を持ち、当該所定の形状内の所定の箇所を所定のデータとして割り当て、その箇所の色を変えることにより、各画像マーカの種類を特定させる。例えば、ビット6の位置が黒色で塗られている場合には、ビット6が1であることを示し、その位置が白色で塗られている場合には、ビット6が0であることを示す。図2に示す例では、各画像マーカを7ビットのデータにより特定することができる。
【0038】
図3は、3種類の画像マーカとそれに対応するデータを示す図である。図3の左図は、ビット5を示す場所が黒色となっており、それ以外のビットを示す場所は白色で表されて
いる。これにより、左図の画像マーカが示すデータは、バイナリデータとして“0100000”を示す。同様に、中央図は、ビット6、ビット4、ビット1がそれぞれ黒色で表されており、“1010010”を示す。右図は、ビット5、ビット2、ビット0がそれぞれ黒色で表され、“0100101”を示す。
【0039】
なお、画像マーカ15は、上記色彩に限定されるものではなく、より複雑な線図等であってもよいし、現在、ヒートアイランド対策として、道路に赤外線反射塗料を塗ることが検討されているが、そのような塗料を用いて、所定の形状を認識されるようにしてもよい。
【0040】
〔装置構成〕
次に、第一実施形態における車両位置検出装置の機能構成について、図4を用いて説明する。図4は、第一実施形態における車両位置検出装置の機能ブロック図である。
【0041】
本車両位置検出装置は、プロセッサ、メモリ、入出力インタフェース等を備え、以下に示す機能部を制御する。本車両位置検出装置は、画像入力部20(本発明の入力部に相当)、画像認識部21(本発明の認識部に相当)、車両位置測定部22(本発明の取得部、決定部に相当)、画像マーカデータベース23(本発明の記憶部に相当)を備える。
【0042】
画像入力部20には、ビデオカメラ10によって撮影された画像が逐次、入力される。この画像には、上述の画像マーカが映し出されている。画像入力部20は、入力された画像データを画像認識部21に渡す。
【0043】
画像認識部21は、画像入力部20から画像データを受けると、画像データ中にある画像マーカの形態を認識する。画像認識部21は、当該画像データに対して統計処理を行うことにより閾値を決定し、その閾値を用いて画像データを2値化する。画像データの2値化には、例えば、Pタイル法、モード法、動的閾値決定法等の閾値指定法が利用される。
【0044】
画像認識部21は、2値化処理を施した画像データの各領域の中から画像マーカの大きさ、形状に合致する領域を切り出す。画像認識部21は、切り出された領域の大きさ、形から画像マーカの各ビット領域の大きさを計算し、各ビット領域部分のビット情報を認識することにより、当該画像マーカの形態に対応する情報を取得する。例えば、図3の右に示される画像マーカが認識された場合には、“0100101”というバイナリデータが取得される。画像認識部21は、画像マーカに対応する情報を車両位置測定部22に渡す。
【0045】
車両位置測定部22は、画像マーカデータベース23を参照し、画像認識部21から出力される画像マーカに対応する情報から画像マーカの位置を取得し、当該車両の位置(交差点まで100メートルの地点等)を出力する。
【0046】
画像マーカデータベース23は、図5に示すように、画像マーカに対応する情報(画像マーカデータ)と画像マーカの位置情報の相対を格納するデータベースである。車両位置測定部22は、画像マーカデータをキーとして、この画像マーカデータベース23を参照し、当該画像マーカの位置情報を取得する。
【0047】
〈第一実施形態における作用/効果〉
ここで、上述した第一実施形態における車両位置検出装置の作用及び効果について述べる。
【0048】
第一実施形態における車両位置検出装置では、車載のビデオカメラにより撮影された画
像が画像入力部20から入力され、入力された画像データから画像マーカが認識される。画像認識部21では、画像処理により画像マーカが認識され、画像マーカに対応する情報が取得される。車両位置測定部22では、取得された画像マーカに対応する情報に基づき、画像マーカデータベース23が参照され、画像マーカの位置情報が取得される。
【0049】
このように、第一実施形態における車両位置検出装置では、画像処理により、路上の画像マーカが認識され、当該画像マーカの位置情報により、車両の位置が特定される。
【0050】
よって、磁気マーカ等のように特殊な機能を有するマーカではなく、単に、形態が識別可能な画像マーカにより、車両の位置を特定することが可能となる。
【0051】
[第二実施形態]
次に、本発明の第二実施形態における車両位置検出装置について説明する。第一実施形態は、ビデオカメラが車両の直下を通過する画像マーカを撮影する形態についてのものであった。第二実施形態は、ビデオカメラが車両の前方の画像マーカを撮影する形態についてのものである。
【0052】
図6は、第二実施形態における車両位置検出装置の概要を示す図である。第二実施形態における本車両位置検出装置は、図6に示すように、車両の前方に設置されたビデオカメラ10から、車両前方を通過する画像マーカ15を撮影し、その撮影された画像を用いて位置検出を行う。なお、ビデオカメラ10の設置位置等は、図6に示す位置に限定するものではない。
【0053】
〔装置構成〕
第二実施形態における車両位置検出装置の機能構成について、図7を用いて説明する。図7は、第二実施形態における車両位置検出装置の機能ブロック図である。
【0054】
第二実施形態における車両位置検出装置は、第一実施形態における機能部の他、画像マーカ・車両間距離計算部71(本発明の算出部に相当)を備える。以下に、第二実施形態における車両位置検出装置の各機能部について説明する。なお、第一実施形態と同様の機能部については、説明を省略する。
【0055】
第二実施形態における車両位置検出装置では、ビデオカメラ10が車両前方を撮影しているため、画像入力部20に入力される画像データは、図8に示すような画像となる。図8に示す入力画像の例では、車両前方の画像マーカ81から84が映し出されている。画像入力部20は、当該入力画像を画像認識部21に渡す。
【0056】
画像認識部21は、車両に一番近い位置に写る画像マーカ81を認識する。画像認識部21による画像認識処理については、第一実施形態と同様である。画像認識部21は、認識された画像マーカ81に対応する情報を車両位置測定部22に渡すと共に、画像マーカ・車両間距離計算部71に、認識された画像マーカ81に対応する情報、及び認識された画像マーカ81の画像データ中の位置情報(画像下端部からの位置等)を渡す。
【0057】
画像マーカ・車両間距離計算部71は、画像データ上の位置と車両からの距離の関係を予め保持している。これらは、カメラ設置角、カメラの焦点距離、カメラの設置高さ等によって一意に決まるものであるため、初期設定処理等によって、画像マーカ・車両間距離計算部71に保持されるようにしてもよい。画像マーカ・車両間距離計算部71は、この画像データ上の位置と車両からの距離の関係から、画像マーカと車両との間の距離を計算する。画像マーカ・車両間距離計算部71は、計算された距離を車両位置測定部22に渡す。
【0058】
車両位置測定部22は、画像マーカ・車両間距離計算部71から受けた距離と、画像マーカデータベース内にある画像マーカの位置情報とから、車両位置を算出する。
【0059】
〈第二実施形態における変形例〉
上述の手法では、画像マーカ・車両間距離計算部71は、予め、画像データ上の位置と車両からの距離の関係を保持し、その情報を用いて、画像マーカと車両との間の距離を算出する。ここでは、このような情報を保持せず、当該画像マーカと車両との間の距離を算出する手法について、図9及び10を用いて説明する。図9は、第二実施形態の変形例における入力画像を示す図である。図10は、第二実施形態の変形例における画像マーカ・車両間距離の計算概念を示す図である。
【0060】
この場合、画像認識部21は、車両に一番近い位置に移る画像マーカ81の他、入力画像の垂直方向の中心線より上に映る画像マーカ83及び84を認識する。画像認識部21は、認識された画像マーカ81、83及び84に関し、それぞれ、対応する情報(第一実施形態におけるバイナリデータ等)を取得する。さらに、画像認識部21は、画像マーカ83及び84に関しては、入力画像の垂直方向の中心からの位置情報を取得する(C1、
C2、C3及びC4)。また、画像認識部21は、画像マーカ81に関し、当該入力画像の
垂直方向の中心線からの位置情報(C5)を取得する。
【0061】
画像認識部21は、画像マーカ81に対応する情報を車両位置測定部22に渡すと共に、画像マーカ・車両間距離計算部71へ、画像マーカ81、83、及び84にそれぞれ対応する情報、位置情報C1、C2、C3、C4、及びC5などを渡す。
【0062】
画像マーカ・車両間距離計算部71は、画像認識部21から受けた情報に基づき、まず、図10に示すように、カメラ設置角E、カメラの焦点距離B、カメラの設置高さDを、以下に示す算出処理により求める。
【0063】
画像マーカ83の下端部と車両との距離A1、画像マーカ83の上端部と車両との距離
A2、画像マーカ84の下端部と車両との距離A3、画像マーカ84の上端部と車両との距離A4については、以下に示す関係が成立する。
【0064】
A1=D/(tan(E−tan-1(C1/B))) (式1)
A2=D/(tan(E−tan-1(C2/B))) (式2)
A3=D/(tan(E−tan-1(C3/B))) (式3)
A4=D/(tan(E−tan-1(C4/B))) (式4)
さらに、式1から4により、以下の関係が成立する。
【0065】
(式1)−(式2)=(画像マーカ83の縦の長さ) (式5)
(式2)−(式3)=(画像マーカ83と画像マーカ84との間隔) (式6)
(式3)−(式4)=(画像マーカ84の縦の長さ) (式7)
画像マーカ・車両間距離計算部71は、画像認識部21から受けた画像マーカ83及び84に対応する情報をキーに、画像マーカデータベースを参照することにより、上記(画像マーカ83の縦の長さ)、(画像マーカ83と画像マーカ84との間隔)、(画像マーカ84の縦の長さ)を取得し、取得された情報を式5から7に代入することにより、連立方程式を解く。画像マーカ・車両間距離計算部71は、これにより、カメラ設置角E、カメラの焦点距離B、カメラの設置高さDを取得する。
【0066】
画像マーカ・車両間距離計算部71は、算出された情報(E、B、D)及び画像認識部21から受けた位置情報C5を用いることにより、画像マーカ81と車両との間の距離を
算出する(A5=D/(tan(E−tan-1(C5/B))))。
【0067】
なお、上述の画像マーカ・車両間距離計算部71によるカメラ設置角E、カメラの焦点距離B、カメラの設置高さDの算出は、車両位置算出時に常に実行されてもよいし、所定の周期により処理され、算出結果がメモリ等に保持されるようにし、その保持された情報を用いて、画像マーカと車両との間の距離を算出するようにしてもよい。
【0068】
また、上述の算出では、入力画像の垂直方向の中心からの距離(C1からC4)を用いたが、下端部からの距離、上端部からの距離、その他考えられる位置関係を用いて算出するようにしてもよい。すなわち、上述の算出処理は、入力画像に映し出された複数の画像マーカの位置関係を用いているものであって、それらをどのように使うかを限定するものではない。
【0069】
〈第二実施形態における作用/効果〉
ここで、上述した第二実施形態における車両位置検出装置の作用及び効果について述べる。
【0070】
第二実施形態における車両位置検出装置では、撮影された画像データに映る画像マーカと車両とは一定の距離があるため、画像マーカ・車両間距離計算部71により、その距離が算出される。
【0071】
画像マーカ・車両間距離計算部71では、画像データ上の位置と実際の車両との距離との関係が保持されており、その関係から、認識された画像マーカと車両との間の実距離が算出される。
【0072】
また、変形例としての画像マーカ・車両間距離計算部71では、入力された画像データ上に写る複数の画像マーカの位置、配列等の情報に基づき、画像データ上の位置と実際の車両との距離との関係が算出される。
【0073】
車両位置測定部22は、画像マーカデータベースに格納されている画像マーカの位置情報と、画像マーカ・車両間距離計算部71により算出された距離から、車両の位置を特定する。
【0074】
これにより、ビデオカメラが車両の前方に設置されている場合についても、当該ビデオカメラを利用することにより、第一実施形態と同様の手法で、車両の位置を特定することができる。
【0075】
[第三実施形態]
次に、本発明の第三実施形態における車両位置検出装置について説明する。
【0076】
〔装置構成〕
第三実施形態における車両位置検出装置の機能構成について、図11を用いて説明する。図11は、第三実施形態における車両位置検出装置の機能ブロック図である。
【0077】
第三実施形態における車両位置検出装置は、第一実施形態における機能部の他、画像マーカ配列記憶部111(本発明の格納部に相当)を備える。以下に、第三実施形態における車両位置検出装置の各機能部について説明する。なお、第一実施形態と同様の機能部については、説明を省略する。第三実施形態における車両位置検出装置では、ビデオカメラ10が車両直下に通過する画像マーカを撮影する構成を例に挙げる(図1参照)。
【0078】
第三実施形態における画像マーカデータベース23には、個々の画像マーカを示す情報の配列とその配列が示す位置情報とが関連付けられ格納される。まず、この画像マーカデータベース23に格納されるデータの概念について、図12及び13を用いて説明する。図12は、第三実施形態における画像マーカ配列の概念を示す図である。図13は、第三実施形態における画像マーカデータベース構成の概念を示す図である。
【0079】
例えば、路上に画像マーカA、B、C、D、Eが車両の進行方向(図の左から右への方向)へ、A->D->B->C->B->Eの順で設置されている地点を考える。この場合、画像マーカデータベース23には、図13に示すようなデータが格納される。画像マーカデータベース23には、画像マーカが「A->D->B」の順で認識された場合「地点1」を示し、画像マーカが「D->B->C」の順で認識された場合「地点2」を示すといった情報が格納される。すなわち、画像マーカデータベース23には、画像マーカの配列に基づき車両の位置を特定するための情報が格納される。
【0080】
また、画像マーカにM系列(Maximum Length Sequence)を利用した場合の例を図14
及び15に示す。図14は、第三実施形態における画像マーカ配列の例を示す図である。図15は、第三実施形態における画像マーカデータベース構成の例を示す図である。図14の例では、画像マーカ15は、「1」に対応するものと、「0」に対応するものが所定のM系列を利用した形で配列されている。この場合、画像マーカデータベース23には、図15に示すように、画像マーカ配列「1101」に対応する位置情報が「地点1」として登録され、画像マーカ配列「1010」に対応する位置情報が「地点2」として登録される。
【0081】
更に、画像マーカとして、第一実施形態における画像マーカ15を採用した場合の例を図16及び17を用いて説明する。図16は、第三実施形態における画像マーカ配列の例を示す図である。図17は、第三実施形態における画像マーカデータベース構成の例を示す図である。この場合、各画像マーカは7ビットの情報に対応付けられるため、画像マーカデータベース23には、7ビット情報を3つ持つ画像マーカ配列が、位置情報と関連付けられる。
【0082】
以下に述べる他の機能部の説明は、図17に示す例の画像マーカデータベース23を有する場合のものである。
【0083】
画像入力部20には、図16に示す画像マーカをビデオカメラ10によって撮影した画像が逐次、入力される。画像入力部20は、入力された画像データを画像認識部21に渡す。
【0084】
画像認識部21は、画像入力部20から画像データを受けると、第一実施形態で述べたように、受けた画像マーカの形態に対応する数値情報を取得する。画像認識部21は、画像マーカに対応する情報を画像マーカ配列記憶部111に渡す。
【0085】
画像マーカ配列記憶部111は、画像認識部21から受けた画像マーカに対応する情報と共に、記憶されている前回までの画像マーカに対応する情報の配列を車両位置測定部22に渡す。画像マーカ配列記憶部111は、今回画像認識部21から受けた画像マーカに対応する情報を前回までの情報と共に記憶する。なお、本実施形態では、最新の情報の他、2つ前までの情報を以って画像マーカ配列とするが、これに限定するものではなく、より複数の情報を使って画像マーカ配列としてもよい。
【0086】
車両位置測定部22は、画像マーカデータベース23を参照し、画像認識部111から出力される画像マーカ配列から位置情報を取得し、当該車両の位置(地点1等)を出力
する。
【0087】
〈第三実施形態の変形例〉
上述の第三実施形態における車両位置検出装置では、ビデオカメラ10が車両直下に通過する画像マーカを撮影する構成を例(図1参照)に挙げたが、第二実施形態における構成を用いるようにしてもよい。この場合、図6に示すように、車両の前方に設置されたビデオカメラ10から、車両前方を通過する画像マーカ15を撮影し、その撮影された画像を用いて位置検出を行う。
【0088】
この場合の車両位置検出装置の構成例を図18に示す。図18は、第三実施形態における車両位置検出装置の変形例を示す図である。すなわち、この場合の車両位置検出装置は、第三実施形態における装置構成に、第二実施形態における画像マーカ・車両間距離計算部71を付加した構成となる。
【0089】
画像マーカデータベース23には、画像マーカ配列と位置情報との関連付け情報の他、各画像マーカの縦の長さ、各画像マーカ間の間隔等が記憶される。
【0090】
画像マーカ・車両間距離計算部71は、第二実施形態と同様の処理により、カメラ設置角E、カメラの焦点距離B、カメラの設置高さD等を取得し、例えば、入力画面中の最も近い位置に写る画像マーカと車両との間の距離を算出する。
【0091】
車両位置測定部22は、画像マーカ・車両間距離計算部71から受ける画像マーカと車両との間の距離と、当該画像マーカ配列により画像マーカデータベース23から取得される位置情報とから、車両の位置を特定する。
【0092】
〈第三実施形態における作用/効果〉
ここで、上述した第三実施形態における車両位置検出装置の作用及び効果について述べる。
【0093】
第三実施形態における車両位置検出装置では、画像マーカ配列記憶部111に、認識された画像マーカの形態に対応する数値情報が逐次記憶される。また、画像マーカデータベース23には、当該画像マーカの配列とその配列に対応する位置情報とが格納されている。
【0094】
これにより、本実施形態における車両位置検出装置では、最新の認識された画像マーカを含んだ当該画像マーカ配列に基づき、車両の位置情報が決定される。
【0095】
従って、本実施形態における車両位置検出装置によれば、画像マーカの種類、すなわち、画像マーカに持たせる情報を少なくすることができる。よって、画像マーカ認識処理の負荷を抑えることができ、画像マーカのサイズも小さくすることができる。
【0096】
[第四実施形態]
次に、本発明の第四実施形態における車両位置検出装置について説明する。
【0097】
図19は、第四実施形態における車両位置検出装置の概要を示す図である。本車両位置検出装置は、図19に示すように、例えば、道路等に設置されたビデオカメラ10(本発明の撮像部に相当)から、車両に備え付けられた画像マーカ15を撮影し、その撮影された画像を用いて位置検出を行う。なお、ビデオカメラ10の設置位置等は、図19に示す位置に限定するものではなく、車両の画像マーカ15を撮影可能な位置であればどこでもよい。
【0098】
〔装置構成〕
第四実施形態における車両位置検出装置の機能構成について、図20を用いて説明する。図20は、第四実施形態における車両位置検出装置の機能ブロック図である。
【0099】
第四実施形態における車両位置検出装置は、車両以外の場所に、画像入力部201(本発明の入力部に相当)、画像認識部202(本発明の認識部に相当)、識別情報取得部203(本発明の取得部に相当)、画像マーカデータベース204(本発明の記憶部に相当)、及び情報送信部205(本発明の送信部に相当)を備え、車両に、情報受信部206(本発明の受信部に相当)、車両位置測定部207(本発明の決定部に相当)、及び位置情報データベース208を備える。車両以外の場所とは、路上、信号機、電柱等、車両と隣接する場所が考えられる。画像マーカ15の構成については、第一実施形態と同様であるため、説明を省略する。
【0100】
画像入力部201には、画像マーカ15をビデオカメラ10によって撮影した画像が逐次、入力される。画像入力部201は、入力された画像データを画像認識部202に渡す。
【0101】
画像認識部202は、画像入力部201から画像データを受けると、画像データ中にある画像マーカの形状を認識する。画像認識部202による画像認識処理については、第一実施形態と同様である。画像認識部202は、当該画像認識処理により当該画像マーカの形態に対応する数値情報を取得し、識別情報取得部203に渡す。
【0102】
画像マーカデータベース204には、画像マーカの形態に対応する数値情報とその数値情報に対応する車両の識別情報が格納されている。識別情報取得部203は、画像マーカデータベース204を参照することにより、画像マーカの形態に対応する情報から車両の識別情報を取得し、情報送信部205に出力する。
【0103】
情報送信部205は、識別情報取得部203から受けた車両の識別情報と自装置を示す識別情報を車両に送信する。この送信されたデータを受信する情報受信部206は、情報送信部205と無線により通信する。無線通信の規格については、何ら制限するものではない。
【0104】
車両に搭載された情報受信部206は、情報送信部205から送信され、アンテナ等により取得された、当該装置を示す識別情報と車両の識別情報を受信する。受信された情報は、車両位置測定部207に出力される。
【0105】
位置情報データベース208には、情報送信部205から送信される当該装置を示す識別情報とその識別情報に対応する位置情報とが格納されている。
【0106】
車両位置測定部207は、受信された車両の識別情報から、当該受信された情報が自車両に関する情報か否かを判断する。車両位置測定部207は、例えば、各車両にそれぞれ搭載されるメモリに予め記憶された自車両を示す識別情報と、情報受信部206で受信された車両の識別情報とを比較し、一致した場合に自車両に関する情報であると判断する。車両位置測定部207は、受信された情報が自車両に関する情報であると判断すると、当該装置を示す識別情報を位置情報データベースに問い合わせることにより、当該路上に設置された装置の位置を取得し、車両の位置とする。
【0107】
なお、画像マーカの形態に対応する情報を車両の識別情報とみなし、情報送信部205から車両の識別情報を送信する代わりに、画像マーカの形態に対応する情報を送信するよ
うにしてもよい。この場合には、画像マーカデータベース204は不要となる。そして、車両位置測定部207は、受信された画像マーカの形態に対応する情報から、自車両に関する情報であるか否かを判断する。
【0108】
〈第四実施形態の変形例〉
上述の第四実施形態における車両位置検出装置では、情報送信部205が路上に設置された装置を示す識別情報を車両に送信する構成を採るが、情報送信部205から送信される情報として、当該装置の位置情報を送信するようにしてもよい。
【0109】
この場合の車両位置検出装置の機能ブロックを図21に示す。図21に示される第四実施形態における車両位置検出装置では、車両に備え付けられる車両位置検出装置には、車両位置測定部207及び位置情報データベース208に相当する機能部は省かれている。
【0110】
情報送信部205は、メモリ等に格納された自身の位置情報を読み出し、車両の識別情報若しくは画像マーカの形態に対応する情報と共に、送信する。これらの情報を受信した情報受信部206は、車両の識別情報若しくは画像マーカの形態に対応する情報から、自車両に関する情報か否かを判断する。情報受信部206は、自車両に関する情報であると判断すると、受信された位置情報により、車両の位置を特定する。
【0111】
〈第四実施形態における作用/効果〉
ここで、上述した第四実施形態における車両位置検出装置の作用及び効果について述べる。
【0112】
第四実施形態における車両位置検出装置では、画像マーカが車両に搭載され、路上に設置されたビデオカメラで撮影される。撮影された画像マーカが画像認識部202により認識されると、画像マーカデータベース204から当該画像マーカに対応する車両の識別情報が取得される。取得された車両の識別情報は、路上に設置された本装置を示す識別情報と共に、情報送信部205から送信される。
【0113】
当該車両の識別情報と本装置を示す識別情報とが情報受信部206により受信されると、車両位置測定部207では、これら受信された情報が自車両のための情報であるか否かが、受信された車両の識別情報に基づき判断される。当該受信された情報が自車両のための情報であると判断されると、位置情報データベース208が参照され、受信された本装置を示す識別情報により、本装置の位置情報が取得される。第四実施形態における車両位置検出装置では、取得された本装置の位置情報が車両の位置として特定される。
【0114】
また、第四実施形態における車両位置検出装置の変形例では、車外に設置された装置から送信される情報のうち、当該本装置を示す識別情報の代わりに、当該本装置の位置情報が送信される。これにより、受信側となる車載装置では、他の処理がなされることなく、受信された情報がその車両の位置として特定される。
【0115】
[第五実施形態]
次に、本発明の第五実施形態における衝突回避装置について説明する。第五実施形態における衝突回避装置は、上述の第一実施形態から第四実施形態における車両位置検出装置から出力される位置情報を利用して、車両の衝突を回避する。
【0116】
図22は、第五実施形態における衝突回避装置の概要を示す図である。本衝突回避装置を搭載した車両221と車両222とは、自身で検出された位置情報をお互いにやりとりすることにより、衝突を回避する。
【0117】
〔装置構成〕
第五実施形態における衝突回避装置の機能構成について、図23を用いて説明する。図23は、第五実施形態における衝突回避装置の機能ブロック図である。
【0118】
第五実施形態における衝突回避装置は、車両位置検出装置231、距離計算部232(本発明の距離計算部に相当)、通信部233(本発明の通信部に相当)、衝突判定部234(本発明の衝突判定部に相当)、及び衝突警報・回避部235(本発明の制御部に相当)を備える。車両位置検出装置231は、上述の第一実施形態から第四実施形態のいずれかの方法により、画像マーカから自車両の位置を検出し、距離計算部232に出力する。
【0119】
距離計算部232は、車両位置検出装置231から受ける自車両の位置情報から交差点までの距離を計算する。距離計算部232は、例えば、メモリに格納されている地図情報等を利用して、位置情報から交差点までの距離を計算する。なお、車両位置検出装置231から、直接現在の位置から交差点までの距離情報を受けるようにしてもよいし、交差点等に設置された通信装置から通信部233を経由して入力されるようにしてもよい。距離計算部232は、算出された交差点までの距離情報を衝突判定部234と通信部233に渡す。
【0120】
通信部233は、同じ交差点に進入し交差する可能性のある車両へ、自車両の交差点までの距離及び車両速度を送信する。また、通信部233は、同じ交差点に進入し交差する可能性のある相手車両から、相手車両における交差点までの距離及び車両速度を受信する。通信部233は、受信された相手車両における交差点までの距離及び車両速度を衝突判定部234に出力する。
【0121】
衝突判定部234は、距離計算部232から受ける自車両の交差点までの距離、及び自車両に搭載される車速センサ236から受ける車両速度と、通信部233から受ける相手車両の交差点までの距離及び車両速度とから、当該交差点における衝突の可能性を判断する。この衝突可能性の判断には、衝突の可能性があると判断される所定の閾値(例えば、5秒後の両車両間の距離が2メートル以内)が予めメモリ等に格納されており、そのような所定の閾値に基づいて判断されるようにしてもよい。衝突判定部234は、判定された衝突可能性を衝突警報・回避部235に渡す。
【0122】
衝突警報・回避部235は、衝突の可能性があると判定されている場合に、警報発生やブレーキ等の衝突回避動作処理を行う。衝突警報・回避部235は、例えば、衝突判定部234から受ける情報を所定の警報レベルに分け、その警報レベルに応じた処理を行うようにしてもよい。
【0123】
なお、上述の装置構成では、車両221と車両222とが直接通信する例を示したが、図24に示すように、交差点等に設置された衝突監視装置241を経由して、交差点までの距離情報や車速度情報等をやりとりするようにしてもよい。この場合には、図23に示す衝突回避装置の機能部のうち、車両には、車両位置検出装置231及び通信部233のみ備えるようにし、衝突監視装置241に、距離計算部232及び衝突判定部234を持たせるようにしてもよい。その場合、車両における車両位置検出装置231から出力される位置情報が通信部233から衝突監視装置241に送信され、衝突監視装置223の距離計算部232及び衝突判定部234により衝突判定情報が出力される。この衝突判定情報は、再度、車両に送信され、車両によって衝突回避制御がなされるようにしてもよい。
【0124】
〈第五実施形態における作用/効果〉
ここで、上述した第五実施形態における衝突回避装置の作用及び効果について述べる。
【0125】
第五実施形態における衝突回避装置では、他の実施形態における車両位置検出装置が出力する車両の位置情報から交差点までの距離を算出し、この算出された距離情報と、車速度情報とを、車両間相互に通信する。
【0126】
衝突判定部では、自車両に関する当該交差点までの距離及び車速度と、受信された他の車両に関するそれら情報とに基づき、当該交差点における衝突の可能性が判定される。この衝突の可能性の判定から、衝突警報・回避部235が所定の衝突回避動作制御を行う。
【0127】
このように、本実施形態における衝突回避装置では、上述の実施形態の車両位置検出装置により検出された車両の位置情報が利用されることにより、他の車両との衝突可能性が判定される。これにより、検出された車両位置が安全な車両運転を可能とするシステムに利用することができる。
【0128】
[第六実施形態]
次に、本発明の第六実施形態における障害物検知装置について説明する。第六実施形態における障害物検知装置では、図25に示すような、路上にある障害物256が検知される。図25は、左に、障害物がない状態での路上に並ぶ画像マーカ251から255を示し、右に、障害物256が画像マーカ253上に存在する場合の例を示す。本障害物検知装置は、画像マーカの配列、画像マーカの位置等の情報をデータベースに格納し、あるべき位置に画像マーカが認識されない場合に、障害物が存在する可能性があると判断するものである。
【0129】
〔装置構成〕
第六実施形態における障害物検知装置の機能構成について、図26を用いて説明する。図26は、第六実施形態における障害物検知装置の機能ブロック図である。
【0130】
第六実施形態における車両位置検出装置は、画像入力部20、画像認識部21、車両位置測定部22、画像マーカデータベース23、画像マーカ・車両間距離計算部71、及び障害物検知部261を備える。以下に、第六実施形態における障害物検知装置の各機能部について説明する。
【0131】
第六実施形態における障害物検知装置では、ビデオカメラが車両前方を撮影するように設置されている場合を想定しており、画像入力部20に入力される画像データは、複数の画像マーカが映し出される状態となっている。画像入力部20は、当該入力画像を画像認識部21に渡す。
【0132】
画像認識部21は、画像入力部20から受けた画像データから、映し出された複数の画像マーカを認識する。個々の画像マーカに関する画像認識処理については、第一実施形態に説明したとおりである。画像認識部21は、認識された複数の画像マーカに対応する数値情報を車両位置測定部22に渡すと共に、画像マーカ・車両間距離計算部71に、認識された画像マーカに対応する数値情報、及び認識された画像マーカの画像データ中の位置情報(画像下端部からの位置等)を渡す。
【0133】
車両位置測定部22は、画像マーカ・車両間距離計算部71と共に、車両位置測定処理を実行する。この処理については、第一及び二実施形態で説明したとおりであり、ここでは説明を省略する。
【0134】
車両位置測定部22は、車両位置測定処理に加えて、画像認識部21から受けた複数の画像マーカに対応する数値情報に基づき、画像マーカデータベースからそれら画像マーカの位置を取得する。車両位置測定部22は、車両位置の情報と共に、認識された複数の画
像マーカそれぞれの位置情報を障害物検知部261に渡す。
【0135】
障害物検知部261は、認識された複数の画像マーカそれぞれの位置情報から、画像マーカデータベース23を参照し、本来認識されるべき画像マーカで認識されていない画像マーカがないかを探す。例えば、障害物検知部261は、図25の例によれば、画像データとして、画像マーカ254、252、及び251が認識されている。障害物検知部261は、認識されている画像マーカ254、252、及び251それぞれの位置情報のうち、車両に最も近い画像マーカ254の位置情報と、最も遠い位置にある画像マーカ251の位置情報とから、画像マーカデータベース23を参照することにより、両画像マーカの間に位置すべき画像マーカを検索する。障害物検知部261は、この検索により画像マーカ252及び253が存在することを認知する。これにより、障害物検知部261は、入力画像データに、画像マーカ253が存在しないことを検知する。
【0136】
障害物検知部261は、認識されるべき画像マーカで認識されていないものがあると検知すると、その画像マーカ上に障害物がある可能性があると判断する。障害物検知部261は、認識されていない画像マーカ253の位置情報を画像マーカデータベース23から取得し、その位置情報と、車両の位置情報とから、その障害物への接近度を判定する。障害物検知部261は、所定の距離以上接近したと判断すると、障害物警報発生、ブレーキ等の所定の障害物回避動作制御を行うよう、所定の機能部に指示する。なお、障害物検知部261の最終的な出力(所定の機能部への指示)は、本実施形態により限定するものではない。
【0137】
〈第六実施形態における作用/効果〉
ここで、上述した第六実施形態における障害物回避装置の作用及び効果について述べる。
【0138】
第六実施形態における障害物回避装置では、画像認識部21により複数の画像マーカが認識され、それらが利用され、車両位置測定部22、画像マーカ・車両間距離計算部71により車両の位置情報が取得される。
【0139】
また、障害物検知部261では、認識された複数の画像マーカに関する位置情報から、画像マーカデーベースを参照することにより、認識されるべき画像マーカで認識されていない画像マーカが検知され、その画像マーカの位置情報が取得される。
【0140】
これにより、認識されるべき画像マーカで認識されていない画像マーカの位置情報と、同じく画像マーカにより特定された車両の位置情報とから、障害物回避制御がなされる。
【0141】
このように、本実施形態における障害物回避装置では、認識されない画像マーカをもって、障害物が検知され、当該障害物が自動回避される。
【0142】
従って、当該画像マーカを用いることにより、車両の位置情報を取得するとともに、障害物を回避することもできるようになる。
【0143】
[第七実施形態]
次に、本発明の第七実施形態における車両位置検出装置について説明する。
【0144】
〔装置構成〕
第七実施形態における車両位置検出装置の機能構成について、図27を用いて説明する。図27は、第七実施形態における車両位置検出装置の機能ブロック図である。
【0145】
第七実施形態における車両位置検出装置は、画像入力部20、画像認識部21、画像マーカエラー検出訂正部271、画像マーカ間距離測定部272、画像マーカ間距離計算部273、車両位置測定部22、画像マーカデータベース23を備える。以下に、第七実施形態における車両位置検出装置の各機能部について説明する。
【0146】
画像入力部20、画像認識部21については、第一実施形態等と同様であるため、説明を省略する。画像認識部21は、認識された画像マーカに対応する情報を画像マーカエラー検出訂正部271、及び画像マーカ間距離計算部273にそれぞれ渡すと共に、画像マーカが認識された旨を画像マーカ間距離測定部272に通知する。
【0147】
画像マーカ間距離測定部272は、画像認識部21からの画像マーカ認識通知と、車速センサ274からの車速情報とに基づき、画像マーカ間の距離を測定する。画像マーカ間距離測定部272は、画像マーカ認識通知を受けたときから次の通知を受けるまでの間の時間を計測し、さらに、その間の車速情報とから、画像マーカ間の距離を測定する。画像マーカ間距離測定部272は、測定された画像マーカ間の距離を画像マーカエラー検出訂正部271に渡す。
【0148】
画像マーカ間距離計算部273は、画像認識部21から受ける画像マーカに対応する数値情報に基づき、画像マーカデータベース23から、当該画像マーカの位置情報を取得する。画像マーカ間距離計算部273は、前回認識された画像マーカの位置情報を記憶しており、それと今回取得された画像マーカの位置情報とから、画像マーカ間距離を計算する。画像マーカ間距離計算部273は、算出された画像マーカ間距離を画像マーカエラー検出訂正部271に渡す。
【0149】
画像マーカエラー検出訂正部271は、画像マーカ間距離測定部272により測定された画像マーカ間距離と、画像マーカ間距離計算部273により算出された画像マーカ間距離とを比較する。画像マーカエラー検出訂正部271は、この比較において、両者が異なる場合には、画像マーカ間距離測定部272の結果が正しいと判断し、画像マーカ間距離測定部272からの画像マーカ間距離に対応する画像マーカを画像マーカデータベース23から検索する。画像マーカエラー検出訂正部271は、検索された正しい画像マーカ情報を車両位置測定部22に渡す。
【0150】
画像マーカの読み取りエラーが生じると画像マーカデータベースから計算される画像マーカ間距離は車速センサにより計測される距離とは大きく異なる一方、車速センサによる距離計測が画像マーカ間距離を測定するには十分な精度であると考えられるため、車速を優先適用するようにする。
【0151】
また、画像マーカ間距離測定部272と画像マーカ間距離計算部273との結果が同じ場合には、画像マーカエラー検出訂正部271は、画像認識部21から出力された画像マーカ情報を訂正せずに車両位置測定部22に渡す。
【0152】
車両位置測定部22は、画像マーカデータベース23を参照し、画像マーカエラー検出訂正部271から出力される画像マーカに対応する情報から画像マーカの位置を取得し、当該車両の位置(交差点まで100メートルの地点等)を出力する。
【0153】
〈第七実施形態における作用/効果〉
ここで、上述した第七実施形態における車両位置検出装置の作用及び効果について述べる。
【0154】
第七実施形態における車両位置検出装置では、第一実施形態と同様に、ビデオカメラに
より撮影された画像データが画像入力部20に入力され、画像認識部21によりその画像データから画像マーカが認識される。
【0155】
画像マーカ間距離測定部272では、車速センサ274からの車速情報と画像認識部21からの画像マーカ認識通知とから、画像マーカ間距離が測定される。
【0156】
一方、画像マーカ間距離計算部273では、画像マーカデータベース23が参照され、画像認識部21により認識された画像マーカ情報に基づく位置情報から、画像マーカ間距離が計算される。
【0157】
画像マーカエラー検出訂正部271では、画像マーカ間距離測定部から出力される画像マーカ間距離の測定値と画像マーカ間距離計算部から出力される画像マーカ間距離の計算値を比較して、両者の値が異なる場合に、当該画像マーカの誤認識が検知される。すなわち、画像マーカの読み取りエラーを検出するため、車速センサから得られる画像マーカ間距離とデータベースに格納されている画像マーカの位置情報から計算される画像マーカ間距離を比較し、異なる場合に画像マーカ間距離計算部からの画像マーカの位置を参照して正しい画像マーカの種類を車両位置測定部に出力する。
【0158】
〈第七実施形態の変形例〉
上述の第七実施形態における車両位置検出装置では、ビデオカメラ10が車両直下に通過する画像マーカを撮影する構成を例(図1参照)に挙げたが、第二実施形態における構成を用いるようにしてもよい。この場合、図6に示すように、車両の前方に設置されたビデオカメラ10から、車両前方を通過する画像マーカ15を撮影し、その撮影された画像を用いて位置検出を行う。
【0159】
この場合の車両位置検出装置の構成例を図28に示す。図28は、第七実施形態における車両位置検出装置の変形例を示す図である。すなわち、この場合の車両位置検出装置は、第七実施形態における装置構成に、第二実施形態における画像マーカ・車両間距離計算部71を付加した構成となる。
【0160】
画像マーカデータベース23には、画像マーカ配列と位置情報との関連付け情報の他、各画像マーカの縦の長さ、各画像マーカ間の間隔等が記憶される。
【0161】
画像マーカ・車両間距離計算部71は、第二実施形態と同様の処理により、カメラ設置角E、カメラの焦点距離B、カメラの設置高さD等を取得し、例えば、入力画面中の最も近い位置に写る画像マーカと車両との間の距離を算出する。
【0162】
車両位置測定部22は、画像マーカ・車両間距離計算部71から受ける画像マーカと車両との間の距離と、当該画像マーカ配列により画像マーカデータベース23から取得される位置情報とから、車両の位置を特定する。
【0163】
[第八実施形態]
次に、本発明の第八実施形態における車両位置検出装置について説明する。
【0164】
〔装置構成〕
第八実施形態における車両位置検出装置の機能構成について、図29を用いて説明する。図29は、第八実施形態における車両位置検出装置の機能ブロック図である。第八実施形態における車両位置検出装置は、画像入力部を複数有する(画像入力部20、291及び292)こと以外、第一実施形態と同様の構成を備える。以下に、第八実施形態における車両位置検出装置の各機能部について説明する。なお、第一実施形態と同様の機能部に
ついては、説明を省略する。
【0165】
画像入力部20、291及び292はそれぞれ、車両に搭載されたビデオカメラにより撮影された、画像データを画像認識部21に出力する。
【0166】
画像認識部21は、画像入力部20、291及び292から出力されたそれぞれの画像データに対してそれぞれ画像処理を行い、それぞれの画像マーカの種類を認識する。画像認識部21は、画像マーカに対応する数値情報をそれぞれ車両位置測定部22に出力する。
【0167】
車両位置測定部22は、画像認識部21から受けた画像マーカに対応する数値情報を比較し、画像マーカを正しく認識しているものを選択する。車両位置測定部22は、選択された画像マーカに対応する情報に基づき、画像マーカデータベース23を参照することにより画像マーカの位置情報を取得し、車両位置検出結果として出力する。
【0168】
なお、上述の構成では、複数の画像入力部20、291及び292からの画像データが同時に利用されるが、画像入力部20、291及び292の画像取り込みタイミングが異なるようにしてもよい。図30は、画像入力部20、291及び292の画像取り込みタイミングが等間隔で異なる場合の例による取り込みタイミングを示す図である。
【0169】
図30に示すように等間隔で異なる時間で画像入力部20、291及び292から画像データが取り込まれる場合、その間隔で、車両位置測定がなされるようにしてもよい。それにより、図30に示すタイミングの場合、画像入力部の画像取り込みタイミングの3倍のフレームレートで画像を取り込むことが可能となり、高精度の車両位置検出が可能となる。
【0170】
〈第八実施形態における作用/効果〉
ここで、上述した第八実施形態における車両位置検出装置の作用及び効果について述べる。
【0171】
第八実施形態における車両位置検出装置では、複数のビデオカメラから入力される画像データに対しそれぞれ、画像処理がなされ、画像マーカがそれぞれ認識される。そして、複数の画像データから認識された情報を基に、正しいと認識された画像マーカ情報を用いて、車両位置を特定する。
【0172】
これにより、1つの画像入力部が障害物のために画像マーカを撮影できなかったとしても他の画像入力部で撮影された画像データを利用することができる。この結果、複数の入力画像を使用することにより高信頼、高精度の画像マーカの認識が可能となり、高信頼、高精度の車両位置検出が可能となる。
【0173】
〈第八実施形態の変形例〉
上述の第八実施形態における車両位置検出装置では、画像入力部20、291及び292が出力する画像データは、画像認識部21により取得されていたが、画像認識部を画像入力部それぞれに対応するように備えるようにしてもよい(画像認識部21、311、及び312)。
【0174】
この場合の車両位置検出装置の機能ブロックを図31に示す。画像認識部311は、画像入力部291からの画像データを受け、画像マーカを認識する。同様に、画像認識部21は、画像入力部20からの画像データを受け、画像マーカを認識する。画像認識部312は、画像入力部292からの画像データを受け、画像マーカを認識する。
【0175】
これら画像認識部21、311及び312からそれぞれ出力される画像マーカ認識結果を基に、車両位置測定部22では、正しく認識された画像マーカを特定し、その画像マーカを利用することにより、車両位置を測定する。
【0176】
[第九実施形態]
次に、本発明の第九実施形態における車両位置検出装置について説明する。
【0177】
図32は、第九実施形態における車両位置検出装置の概要を示す図である。本車両位置検出装置は、図32に示すように、特定の位置に設置されたビデオカメラ10から、路上等に備え付けられた複数の画像マーカ15を撮影し、その撮影された画像を用いて位置検出を行う。すなわち、本車両位置検出装置は、図32に示す321から322の範囲を撮影範囲とし、その撮影範囲に入るべき画像マーカで撮影されていない画像マーカを認識することにより、車両の位置を特定するものである。なお、ビデオカメラ10の設置位置等は、図32に示す位置に限定するものではなく、路上等に設置された画像マーカ15を俯瞰撮影可能な位置であればどこでもよい。
【0178】
〔装置構成〕
第九実施形態における車両位置検出装置の機能構成について、図33を用いて説明する。図33は、第九実施形態における車両位置検出装置の機能ブロック図である。
【0179】
第九実施形態における車両位置検出装置は、画像入力部331、画像認識部332、画像マーカ位置測定部333、画像マーカデータベース334、車両位置検知部335、及び画像マーカ位置記憶部336を備える。
【0180】
画像入力部331には、複数の画像マーカ15をビデオカメラ10によって撮影した画像が逐次、入力される。画像入力部331は、入力された画像データを画像認識部332に渡す。
【0181】
画像認識部332は、画像入力部331から画像データを受けると、画像データ中にある複数の画像マーカの形状についてそれぞれ認識する。画像認識部332による画像認識処理については、第一実施形態等と同様である。画像認識部332は、当該画像認識処理により当該画像マーカの形態に対応する数値情報をそれぞれ取得し、画像マーカ位置測定部333に渡す。
【0182】
画像マーカ位置測定部333は、画像マーカデータベース334を参照することにより、画像認識部332から受けた画像マーカの形態に対応した数値情報から、画像マーカの位置情報を取得する。画像マーカ位置測定部333は、取得された複数の画像マーカに対応する位置情報を車両位置検知部335に出力する。
【0183】
車両位置検知部335は、画像マーカ位置測定部333から受けた画像マーカの位置情報を、画像マーカ位置記憶部336に記憶する。車両位置検出部335は、画像マーカ位置記憶部336に記憶された画像マーカの位置と、画像マーカ位置測定部333から入力される画像マーカの位置とを比較することにより、認識されていない画像マーカを特定する。車両位置検知部335は、特定された画像マーカを車両によって隠れている画像マーカであると認識し、その画像マーカの位置を車両の位置情報として出力する。
【0184】
〈第九実施形態における作用/効果〉
ここで、上述した第九実施形態における車両位置検出装置の作用及び効果について述べる。
【0185】
第九実施形態における車両位置検出装置では、複数の画像マーカ15を固定で撮影するビデオカメラから画像データが入力される。入力された画像データに含まれる画像マーカは、画像認識部332により認識され、画像マーカの形態に対応する情報が特定される。
【0186】
画像マーカ位置測定部333では、当該認識された画像マーカの形態に対応する情報に基づき、それに対応する位置情報が画像マーカデータベース334から取得され、この取得された位置情報は、画像マーカ位置記憶部336に記憶される。
【0187】
車両位置検知部335では、今回取得された画像マーカ15の位置情報と、画像マーカ位置記憶部336に記憶される位置情報とを比較することにより、今回認識されていない画像マーカがあるか否かが判断される。今回認識されていない画像マーカがあると判断されると、当該画像マーカの位置情報を車両の位置として特定する。
【0188】
このように、第九実施形態における車両位置検出装置では、信号機や電柱等の路上に固定で設置されるビデオカメラで、常時画像マーカを認識、特定し、認識されない画像マーカがあると判断した場合に、その画像マーカの位置情報を当該車両の位置とする。
【0189】
これにより、画像マーカを用いた車両位置検出が交通制御システム等に用いることも可能となる。
【0190】
[上述の実施形態における変形例]
上述の実施形態では、画像マーカは、図2に示すような形態のものについて言及したが、図34に示すように、他の様々な形態により特定されるようにしてもよい。図34は、画像マーカの変形例を示す。
【0191】
画像マーカは、形状、模様、色、輝度等、画像処理され、画像マーカの種類を特定できるものであれば、どのような形態を持つものでもよい。また、画像マーカは、形状、色、輝度の相違を単独で利用したものだけでなく、複数の形態を組み合わせて、個々を特定するようにしてもよい。例えば、形状と色との組み合わせにより特定されるようにしてもよい。
【0192】
また、図35に示すように、連続した画像マーカを用いるようにしてもよい。
【0193】
[その他]
本実施形態は次の発明を開示する。各項に開示される発明は、必要に応じて可能な限り組み合わせることができる。
【0194】
(付記1)
車両周辺の映像を撮影する撮像部と、
撮影された映像を画像データとして取り込む入力部と、
前記画像データの中から所定の形状を持つ指標を認識し、認識された指標の種類を特定する認識部と、
前記指標の種類とその指標の種類に対応する位置情報とを記憶する記憶部と、
特定された指標の種類に基づき、前記記憶部から位置情報を取得する取得部と、
取得された位置情報により車両の位置を決定する決定部と、
を備える車両位置検出装置。
【0195】
(付記2)
前記認識部は、前記画像データの中から、前記指標の種類を特定すると共に、認識され
た指標の画像データ上の位置及び大きさを認識し、
前記記憶部は、前記指標の種類に対応する位置情報の他、その指標の大きさと、隣接する他の指標との間隔を記憶し、
前記取得部は、前記位置情報の他、該指標の大きさと、隣接する他の指標との間隔を取得し、
前記決定部は、取得された指標の大きさと隣接する他の指標との間隔に基づき、車両から、該指標までの距離を算出する算出部を更に備え、算出された該指標までの距離と、前記位置情報とから、車両の位置を決定する、
付記1に記載の車両位置検出装置。
【0196】
(付記3)
前記認識部により特定された指標の種類を連続した並びで格納する格納部を更に備え、
前記記憶部は、幾つか連続した前記指標の種類の並びと、その並びに対応する前記位置情報とを記憶し、
前記取得部は、前記格納部に格納された指標の種類の並びに基づき、前記記憶部から、その並びに対応する前記位置情報を取得する、
付記1又は2に記載の車両位置検出装置。
【0197】
(付記4)
車両が通過する地点周辺を撮影する撮像部と、
撮影された映像を画像データとして取り込む入力部と、
前記画像データの中から、前記車両に搭載され所定の形状を持つ指標を認識し、認識された指標の種類を特定する認識部と、
前記指標の種類と、その指標の種類に対応する車両の識別情報とを記憶する記憶部と、
特定された指標の種類に基づき、前記記憶部から車両の識別情報を取得する取得部と、
前記取得された車両の識別情報と自装置に関する位置情報とを送信する送信部と、
を備える車両位置検出装置。
【0198】
(付記5)
自車両を識別するための所定の形状を持つ指標を有する車両に搭載された車両位置検出装置であって、
前記指標に基づき車両を特定可能な他の装置から、車両を識別する車両識別情報と、前記他の装置に関する位置情報とを受信する受信部と、
前記車両識別情報から、受信された位置情報が自車両のための情報であると判断された場合に、当該受信された位置情報から自車両の位置を決定する決定部と、
を備える車両位置検出装置。
【0199】
(付記6)
前記送信部は、自装置に関する位置情報に代え、自装置の固有の識別情報を送信する、
付記4に記載の車両位置検出装置。
【0200】
(付記7)
前記受信部は、前記他の装置に関する位置情報に代え、前記他の装置を識別する装置識別情報を受信し、
前記決定部は、前記装置識別情報とその装置識別情報に対応する位置情報とを記憶する車両記憶部を更に備え、前記車両識別情報から、受信された装置識別情報が自車両のための情報であると判断された場合に、前記車両記憶部から、受信された装置識別情報に基づき、位置情報を取得し、この取得された位置情報により自車両の位置を決定する、
付記5に記載の車両位置検出装置。
【0201】
(付記8)
前記認識部による前記指標の認識と、自車両の車速度とに基づき、当該指標間の距離を測定する距離測定部と、
前記取得部により取得される指標の位置情報に基づく、当該指標間の距離を計算する距離計算部と、
前記距離測定部により測定された指標間の距離と、前記距離計算部により計算された指標間の距離とを比較し、その比較結果に基づき、前記認識部による認識の誤りを検出するエラー検出部と、
前記エラー検出部により認識の誤りが検出された場合に、前記距離測定部により測定された当該指標間の距離に基づき、前記記憶部から、正しい指標の種類に関する情報を取得するエラー訂正部とを更に備え、
前記取得部は、前記エラー訂正部により取得された指標の種類に基づき、前記記憶部から位置情報を取得する、
付記1、2、3いずれかに記載の車両位置検出装置。
【0202】
(付記9)
車両が通過する地点周辺を、所定の形状を持つ指標を少なくとも1つ含むように撮影する撮像部と、
撮影された映像を画像データとして取り込む入力部と、
前記画像データの中から、前記少なくとも1つの指標を認識し、認識された指標の種類を特定する認識部と、
前記指標の種類とその指標の種類に対応する位置情報とを記憶する記憶部と、
特定された全ての指標の種類に基づき、前記記憶部から位置情報を取得する取得部と、
取得された位置情報を記憶する位置記憶部と、
前記位置記憶部に記憶された位置情報と、前記取得部により取得された位置情報とを比較した結果、位置情報の数が一致しない場合に、前記取得部により取得された位置情報で足りない位置情報に対応する指標が認識されていないことを検知し、この認識されていない指標に関する位置情報を車両の位置と決定する決定部と、
を備える車両位置検出装置。
【0203】
(付記10)
前記撮像部及び前記入力部を複数備える付記1、2、3、4、6、8、9いずれかに記載の車両位置検出装置。
【0204】
(付記11)
前記認識部を複数備える付記10に記載の車両位置検出装置。
【0205】
(付記12)
前記複数の入力部は、それぞれ異なるタイミングで画像を取り込む付記10又は11記載の車両位置検出装置。
【0206】
(付記13)
前記指標は、形状、模様、色、輝度のいずれか、或いはその組み合わせにより種類分けされ、
前記認識部は、前記指標の持つ形状、模様、色、輝度のいずれか、或いはその組み合わせを認識することにより、指標の種類を特定する、
付記1から12いずれかに記載の車両位置検出装置。
【0207】
(付記14)
前記指標は、連続、或いは断片的な形状を有し、
前記認識部は、前記指標の持つ形状の疎密、或いは振幅、若しくはその組み合わせを認識することにより、指標の種類を特定する、
付記1から12いずれかに記載の車両位置検出装置。
【0208】
(付記15)
前記決定された自車両の位置に基づき、交差点までの距離を算出する距離計算部と、
他の車両から送信される、他の車両に関する前記交差点までの距離と車速度情報を受信する通信部と、
前記算出された交差点までの距離と、自車両の車速度と、前記他の車両に関する前記交差点までの距離と車速度情報とから、当該交差点における自車両と前記他の車両との接近状態を求め、当該接近状態から衝突可能性を判定する衝突判定部と、
前記衝突可能性から衝突回避制御を行う制御部と、
を更に備える、付記1、2、3、5、7、8、10、11、12いずれかに記載の車両位置検出装置を有する衝突回避装置。
【0209】
(付記16)
前記指標は、形状、模様、色、輝度のいずれか、或いはその組み合わせにより種類分けされ、
前記認識部は、前記指標の持つ形状、模様、色、輝度のいずれか、或いはその組み合わせを認識することにより、指標の種類を特定する、
付記15に記載の衝突回避装置。
【0210】
(付記17)
前記指標は、連続、或いは断片的な形状を有し、
前記認識部は、前記指標の持つ形状の疎密、或いは振幅、若しくはその組み合わせを認識することにより、指標の種類を特定する、
付記15に記載の衝突回避装置。
【0211】
(付記18)
車両周辺の映像を撮影する撮像部と、
撮影された映像を画像データとして取り込む入力部と、
前記画像データの中から複数の所定の形状を持つ指標を認識し、認識された指標の種類をそれぞれ特定する認識部と、
前記指標の種類とその指標の種類に対応する位置情報とを記憶する記憶部と、
特定された指標の種類に基づき、前記記憶部から各指標に対応する位置情報をそれぞれ取得する取得部と、
複数の特定された指標に対応する位置情報に基づき、前記記憶部に記憶された位置情報から、認識されるべき指標で認識されていない指標を検知し、その認識されていない指標の位置情報を前記記憶部から取得する障害物検知部と、
を備える障害物検知装置。
【0212】
(付記19)
前記指標は、形状、模様、色、輝度のいずれか、或いはその組み合わせにより種類分けされ、
前記認識部は、前記指標の持つ形状、模様、色、輝度のいずれか、或いはその組み合わせを認識することにより、指標の種類を特定する、
付記18に記載の障害物検知装置。
【0213】
(付記20)
前記指標は、連続、或いは断片的な形状を有し、
前記認識部は、前記指標の持つ形状の疎密、或いは振幅、若しくはその組み合わせを認識することにより、指標の種類を特定する、
付記18に記載の障害物検知装置。
【0214】
(付記21)
車両周辺の映像を撮影するステップと、
撮影された映像を画像データとして取り込むステップと、
前記画像データの中から所定の形状を持つ指標を認識し、認識された指標の種類を特定するステップと、
特定された指標の種類に基づき、前記指標の種類とその指標の種類に対応する位置情報とが記憶された記憶部から、位置情報を取得するステップと、
取得された位置情報により車両の位置を決定するステップと、
を備える車両位置検出方法。
【0215】
(付記22)
所定の形状を持つ指標を持つ車両に搭載された装置と、車両外に設置された装置とで実行される車両位置検出方法であって、
前記車両外に設置された装置により、
前記車両が通過する地点周辺を撮影するステップと、
撮影された映像を画像データとして取り込むステップと、
前記画像データの中から、前記指標を認識し、認識された指標の種類を特定するステップと、
特定された指標の種類に基づき、前記指標の種類とその指標の種類に対応する車両の識別情報とを記憶する記憶部から、車両の識別情報を取得するステップと、
前記取得された車両の識別情報と自装置に関する位置情報とを送信するステップとが実行され、
前記車両に搭載された装置により、
前記車両外に設置された装置から送信された、車両を識別する車両識別情報と、前記車両外の装置に関する位置情報とを受信するステップと、
前記車両識別情報から、受信された位置情報が自車両のための情報であると判断された場合に、当該受信された位置情報から自車両の位置を決定する決定部とが実行される車両位置検出方法。
【0216】
(付記23)
付記21に記載の車両位置検出方法を有した衝突回避方法であって、
前記決定された自車両の位置に基づき、交差点までの距離を算出するステップと、
他の車両から送信される、他の車両に関する前記交差点までの距離と車速度情報を受信するステップと、
前記算出された交差点までの距離と、自車両の車速度と、前記他の車両に関する前記交差点までの距離と車速度情報とから、当該交差点における自車両と前記他の車両との接近状態を求め、当該接近状態から衝突可能性を判定するステップと、
前記衝突可能性から衝突回避制御を行うステップと、
を更に備える衝突回避方法。
【0217】
(付記24)
車両周辺の映像を撮影するステップと、
撮影された映像を画像データとして取り込むステップと、
前記画像データの中から複数の所定の形状を持つ指標を認識し、認識された指標の種類をそれぞれ特定するステップと、
特定された指標の種類に基づき、前記指標の種類とその指標の種類に対応する位置情報
とを記憶する記憶部から、各指標に対応する位置情報をそれぞれ取得するステップと、
複数の特定された指標に対応する位置情報に基づき、前記記憶部に記憶された位置情報から、認識されるべき指標で認識されていない指標を検知し、その認識されていない指標の位置情報を前記記憶部から取得するステップと、
を備える障害物検知方法。
【図面の簡単な説明】
【0218】
【図1】第一実施形態における車両位置検出装置の概要を示す図である。
【図2】画像マーカの例を示す図である。
【図3】画像マーカと2値化を示す図である。
【図4】第一実施形態における車両位置検出装置の機能構成を示すブロック図である。
【図5】画像マーカデータベースを示す図である。
【図6】第二実施形態における車両位置検出装置の概要を示す図である。
【図7】第二実施形態における車両位置検出装置の機能構成を示すブロック図である。
【図8】第二実施形態における入力画像を示す図である。
【図9】第二実施形態の変形例における入力画像を示す図である。
【図10】第二実施形態の変形例における画像マーカ・車両間距離の計算概念を示す図である。
【図11】第三実施形態における車両位置検出装置の機能構成を示すブロック図である。
【図12】第三実施形態における画像マーカ配列の概念図である。
【図13】第三実施形態における画像マーカデータベースの概念図である。
【図14】第三実施形態における画像マーカ配列の第一の例を示す図である。
【図15】第三実施形態における画像マーカデータベースの第一の例を示す図である。
【図16】第三実施形態における画像マーカ配列の第二の例を示す図である。
【図17】第三実施形態における画像マーカデータベースの第二の例を示す図である。
【図18】第三実施形態における車両位置検出装置の変形例を示す図である。
【図19】第四実施形態における車両位置検出装置の概要を示す図である。
【図20】第四実施形態における車両位置検出装置の機能構成を示すブロック図である。
【図21】第四実施形態における車両位置検出装置の変形例を示す図である。
【図22】第五実施形態における衝突回避装置の概要を示す図である。
【図23】第五実施形態における衝突回避装置の機能構成を示すブロック図である。
【図24】第五実施形態における衝突回避装置の変形例を示す図である。
【図25】第六実施形態における障害物検知の概要を示す図である。
【図26】第六実施形態における障害物検知装置の機能構成を示すブロック図である。
【図27】第七実施形態における車両位置検出装置の機能構成を示すブロック図である。
【図28】第七実施形態における車両位置検出装置の変形例を示す図である。
【図29】第八実施形態における車両位置検出装置の機能構成を示すブロック図である。
【図30】画像入力部による画像取り込みタイミングを示す図である。
【図31】第八実施形態における車両位置検出装置の変形例を示す図である。
【図32】第九実施形態における車両位置検出装置の概要を示す図である。
【図33】第九実施形態における車両位置検出装置の機能構成を示すブロック図である。
【図34】画像マーカの変形例を示す図である。
【図35】連続した画像マーカの例を示す図である。
【符号の説明】
【0219】
10 ビデオカメラ
15 画像マーカ
20、201、291、292、331 画像入力部
21、202、311、312、332 画像認識部
22 車両位置測定部
23、204、334 画像マーカデータベース
71 画像マーカ・車両間距離計算部
81、82、83、84 画像マーカ
111 画像マーカ配列記憶部
203 識別情報取得部
205 情報送信部
206 情報受信部
207 車両位置測定部
208 位置情報データベース
221、222 車両
231 車両位置検出装置
232 距離計算部
233 通信部
234 衝突判定部
235 衝突警報・回避部
236、274 車速センサ
241 衝突監視装置
251、252、253、254、255 画像マーカ
256 障害物
261 障害物検知部
271 画像マーカエラー検出訂正部
272 画像マーカ間距離測定部
273 画像マーカ間距離計算部
321、322 撮影範囲
333 画像マーカ位置測定部
335 車両位置検知部
336 画像マーカ位置記憶部
【技術分野】
【0001】
本発明は、車両の走行位置を検出する装置及びシステムに関する。
【背景技術】
【0002】
近年、ミリ波レーダ、DSRC(Dedicated Short Range Communication)、画像認識などにより車の安全運転を支援する装置の開発が行われている。その中でも、車両の走行位置を検出し、その走行位置情報を利用したシステムが多く利用されている。
【0003】
このような車両位置検出手法として、道路に埋め込まれた磁気マーカを車載機器の磁気センサ等により検出し、当該磁気マーカで特定される情報から自車両の位置を検出する手法がある(特許文献1から5参照)。
【0004】
また、衛星を利用したGPS(Global Positioning System)により車両の位置を検出
する手法もある。
【0005】
その他、車載カメラで道路標示を写し、画像認識処理によって得られた情報から位置情報等が検出される手法がある。この手法では、認識された道路標示が位置情報とともに蓄積されることにより、以後、当該車両が同一地点を通行する場合に、前もって警告を行ったり、道路標示から衝突事故防止に必要な車間距離を算出し、車間距離によって警報を発生したりすることが考えられている(特許文献6及び7参照)。
【0006】
また、ミリ波レーダやレーザレーダにより前方の障害物検出や前方車両との車間距離を計測する手法も考えられている。
【特許文献1】特開平8−219775号公報
【特許文献2】特開2001−28095号公報
【特許文献3】特開平10−103984号公報
【特許文献4】特開2002−150473号公報
【特許文献5】特開2003−295950号公報
【特許文献6】特開2003−178397号公報
【特許文献7】特開平5−310058号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかしながら、例えば、DGPS(Differential GPS)の場合、位置検出精度が1メートルから5メートル程度の測定誤差があるため、交差点、道路の合流地点等の他車両が異なる方向から進入してくる可能性のある地点においては、衝突可能性を事前に判断し、回避するための手段として十分ではない。また、トンネル内やビルの陰などで衛星を必要個数補足できない場合には測定自体が不可能となる。
【0008】
また、ミリ波レーダによる測定では、前方に車両が存在する場合、道路が曲折している場合、見通しが悪い場合等には、測定が不可能となる場合がある。その他、赤外線等のレーザレーダでは、乱反射等により雨などの天候の影響を受けやすく屋外における測定には向いていない。
【0009】
また、レーンマーカに位置情報を持たせることにより位置検出も可能であるが、敷設コストが高いという問題がある。道路に設置した磁気マーカによる位置検出においても、高い精度で検出するためには磁気マーカを短い間隔で敷設しなければならないため、敷設コ
ストが高くなってしまう。
【0010】
本発明の目的は、敷設コストを抑え、精度の高い位置検出を可能とする車両位置検出装置を提供することである。
【課題を解決するための手段】
【0011】
本発明は、上述した課題を解決するために以下の構成を採用する。即ち、本発明は、車両周辺の映像を撮影する撮像部と、撮影された映像を画像データとして取り込む入力部と、 取り込まれた画像データの中から所定の形状を持つ指標を認識し、認識された指標の種類を特定する認識部と、特定された指標の種類とその指標の種類に対応する位置情報とを記憶する記憶部と、特定された指標の種類に基づき、上記記憶部から位置情報を取得する取得部と、取得された位置情報により車両の位置を決定する決定部とを備える車両位置検出装置についてのものである。
【0012】
本発明では、車両周辺の撮影された映像が入力部から取り込まれ、取り込まれた画像データから所定の形状を持つ指標が認識される。さらに、認識された指標から指標の種類が特定されると、特定された指標の種類に対応する位置情報が取得される。
【0013】
このように、本発明に係る車両位置検出装置では、画像処理により、路上等に設置され、位置を示すよう識別された指標が認識され、当該指標の種類に対応する位置情報により、車両の位置が特定される。
【0014】
従って、磁気マーカ等のように特殊で高価な機能を有する指標を用いることなく、単に、画像処理による識別可能な指標により、車両の位置を特定することが可能となる。ひいては、敷設コストを抑えた車両位置検出装置を実現することができる。
【0015】
また、当該指標と撮像部とは接近しているため、誤認識の可能性も低く、当該指標が固定されていれば、それに対応する位置情報も不変であり、精度の高い位置検出が可能となる。
【0016】
また、本発明に係る車両位置検出装置は、上記認識部が、取り込まれた画像データの中から、指標の種類を特定すると共に、認識された指標の画像データ上の位置及び大きさを認識し、上記記憶部が、指標の種類に対応する位置情報の他、その指標の大きさと、隣接する他の指標との間隔を記憶し、上記取得部が、位置情報の他、該指標の大きさと、隣接する他の指標との間隔を取得し、上記決定部が、取得された指標の大きさと隣接する他の指標との間隔に基づき、車両から、該指標までの距離を算出する算出部を更に備え、算出された該指標までの距離と当該位置情報とから車両の位置を決定する。
【0017】
本発明では、撮影された画像データに映る指標と車両との間に所定の距離がある場合が想定され、上記算出部により、認識された指標と車両との間の距離が算出される。上記算出部では、画像データ上の当該指標の位置と大きさと隣接する他の指標との間隔とから、認識された指標と車両との間の距離が算出される。
【0018】
これにより、撮像部が撮影した指標と車両との位置に一定の距離がある場合においても、その距離が算出され、同様に、車両の位置を検出することができる。
【0019】
また、本発明に係る車両位置検出装置は、上記認識部により特定された指標の種類を連続した並びで格納する格納部を更に備え、上記記憶部が、幾つか連続した指標の種類の並びと、その並びに対応する位置情報とを記憶し、上記取得部が、上記格納部に格納された指標の種類の並びに基づき、上記記憶部から、その並びに対応する上記位置情報を取得す
る。
【0020】
本発明では、格納部に、認識された指標の種類が逐次記憶される。また、上記記憶部には、当該指標の種類の並びとその並びに対応する位置情報とが格納される。これにより、本発明では、最新の認識された指標の種類を含んだ当該指標の種類の並びに基づき、車両の位置情報が決定される。
【0021】
従って、本発明によれば、指標の種類を少なくすることができ、すなわち、指標に持たせる情報量を抑えることができる。これにより、指標の認識処理の負荷を抑えることができるため、高速な車両位置検出が可能となり、ひいては、検出された位置情報が精密となる。
【0022】
また、本発明は、車両が通過する地点周辺を、所定の形状を持つ指標を少なくとも1つ含むように撮影する撮像部と、撮影された映像を画像データとして取り込む入力部と、取り込まれた画像データの中から、少なくとも1つの指標を認識し、認識された指標の種類を特定する認識部と、特定された指標の種類とその指標の種類に対応する位置情報とを記憶する記憶部と、特定された全ての指標の種類に基づき、上記記憶部から位置情報を取得する取得部と、取得された位置情報を記憶する位置記憶部と、この位置記憶部に記憶された位置情報と、上記取得部により取得された位置情報とを比較した結果、位置情報の数が一致しない場合に、上記取得部により取得された位置情報で足りない位置情報に対応する指標が認識されていないことを検知し、この認識されていない指標に関する位置情報を車両の位置と決定する決定部とを備える車両位置検出装置についてのものである。
【0023】
本発明では、撮像部が、車両が通過する地点周辺を、所定の形状を持つ指標を少なくとも1つ含むように撮影し、この映像が画像データとして取り込まれる。取り込まれた画像データに含まれる指標がそれぞれ認識され、認識された指標の種類からその種類に対応する位置情報が取得され、位置記憶部にそれぞれ記憶される。
【0024】
そして、決定部では、この位置記憶部に記憶された位置情報と、取得された位置情報とが比較されることで、認識されていない指標が検知され、当該認識されていない指標に関する位置情報が車両の位置と決定される。
【0025】
従って、本発明によれば、当該指標を用いた車両位置検出を車両外の装置で実現することができるため、交通インフラとして交通制御システム等に用いることも可能となる
また、本発明は、所定の形状を持つ指標を有する車両に搭載された装置と車両外に設置された装置とからなる車両位置検出システムについてのものである。
【0026】
このシステムにおける車両外に設置された装置は、車両が通過する地点周辺を撮影する撮像部と、撮影された映像を画像データとして取り込む入力部と、当該画像データの中から、車両に搭載され所定の形状を持つ指標を認識し、認識された指標の種類を特定する認識部と、当該指標の種類と、その指標の種類に対応する車両の識別情報とを記憶する記憶部と、特定された指標の種類に基づき、上記記憶部から車両の識別情報を取得する取得部と、取得された車両の識別情報と自装置に関する位置情報とを送信する送信部とを備える。
【0027】
また、このシステムにおける車両に搭載された装置は、上記車両外に設置された装置から送信された、車両を識別する車両識別情報と、上記車両外の設置された装置に関する位置情報とを受信する受信部と、上記車両識別情報から、受信された位置情報が自車両のための情報であると判断された場合に、当該受信された位置情報から自車両の位置を決定する決定部とを備える。
【0028】
本発明では、指標が車両に搭載され、この指標が車両外に設置された装置の撮像部により撮影される。撮影された指標が認識部により認識され、当該指標の種類に対応する車両の識別情報が取得される。取得された車両の識別情報は、車両外に設置された装置に関する位置情報と共に、送信される。
【0029】
当該車両の識別情報と位置情報とが受信されると、決定部では、これら受信された情報が自車両のための情報であるか否かが判断され、自車両のための情報であると判断されると、当該位置情報により、本車両の位置が特定される。
【0030】
従って、本発明によれば、当該指標を用いた車両の位置検出を車両と車両外に設置された装置間で情報をやりとりすることにより実現できるため、様々な形態を採用することが可能となる。
【0031】
なお、本発明は、以上の何れかの機能を実現させるプログラムであってもよい。また、本発明は、そのようなプログラムをコンピュータが読み取り可能な記憶媒体に記録してもよい。
【発明の効果】
【0032】
本発明によれば、敷設コストを抑え、精度の高い位置検出を可能とする車両位置検出装置を提供することができる。
【発明を実施するための最良の形態】
【0033】
以下、図面を参照して、それぞれ本発明の実施形態について説明する。以下に述べる実施形態の構成は例示であり、本発明は以下の実施形態の構成に限定されない。
【0034】
[第一実施形態]
まず、図面を参照して、本発明の第一実施形態における車両位置検出装置について説明する。
【0035】
図1は、第一実施形態における車両位置検出装置の概要を示す図である。本車両位置検出装置は、図1に示すように、車両に搭載されたビデオカメラ10から、道路に設置された画像マーカ15を撮影し、その撮影された画像を用いて位置検出を行う。なお、ビデオカメラ10の設置位置等は、図1に示す位置に限定されない。
【0036】
〔画像マーカ〕
画像マーカ15(本発明の指標に相当)は、磁気マーカのように磁気を備える必要はなく、例えば、図2及び3に示すような形態を認識させうるものであればよい。図2及び3は、本実施形態で用いる画像マーカの例を示す図である。本実施形態で用いる画像マーカについて、図2を用いて説明する。
【0037】
画像マーカ15は、図2に示すように、所定の形状を持ち、当該所定の形状内の所定の箇所を所定のデータとして割り当て、その箇所の色を変えることにより、各画像マーカの種類を特定させる。例えば、ビット6の位置が黒色で塗られている場合には、ビット6が1であることを示し、その位置が白色で塗られている場合には、ビット6が0であることを示す。図2に示す例では、各画像マーカを7ビットのデータにより特定することができる。
【0038】
図3は、3種類の画像マーカとそれに対応するデータを示す図である。図3の左図は、ビット5を示す場所が黒色となっており、それ以外のビットを示す場所は白色で表されて
いる。これにより、左図の画像マーカが示すデータは、バイナリデータとして“0100000”を示す。同様に、中央図は、ビット6、ビット4、ビット1がそれぞれ黒色で表されており、“1010010”を示す。右図は、ビット5、ビット2、ビット0がそれぞれ黒色で表され、“0100101”を示す。
【0039】
なお、画像マーカ15は、上記色彩に限定されるものではなく、より複雑な線図等であってもよいし、現在、ヒートアイランド対策として、道路に赤外線反射塗料を塗ることが検討されているが、そのような塗料を用いて、所定の形状を認識されるようにしてもよい。
【0040】
〔装置構成〕
次に、第一実施形態における車両位置検出装置の機能構成について、図4を用いて説明する。図4は、第一実施形態における車両位置検出装置の機能ブロック図である。
【0041】
本車両位置検出装置は、プロセッサ、メモリ、入出力インタフェース等を備え、以下に示す機能部を制御する。本車両位置検出装置は、画像入力部20(本発明の入力部に相当)、画像認識部21(本発明の認識部に相当)、車両位置測定部22(本発明の取得部、決定部に相当)、画像マーカデータベース23(本発明の記憶部に相当)を備える。
【0042】
画像入力部20には、ビデオカメラ10によって撮影された画像が逐次、入力される。この画像には、上述の画像マーカが映し出されている。画像入力部20は、入力された画像データを画像認識部21に渡す。
【0043】
画像認識部21は、画像入力部20から画像データを受けると、画像データ中にある画像マーカの形態を認識する。画像認識部21は、当該画像データに対して統計処理を行うことにより閾値を決定し、その閾値を用いて画像データを2値化する。画像データの2値化には、例えば、Pタイル法、モード法、動的閾値決定法等の閾値指定法が利用される。
【0044】
画像認識部21は、2値化処理を施した画像データの各領域の中から画像マーカの大きさ、形状に合致する領域を切り出す。画像認識部21は、切り出された領域の大きさ、形から画像マーカの各ビット領域の大きさを計算し、各ビット領域部分のビット情報を認識することにより、当該画像マーカの形態に対応する情報を取得する。例えば、図3の右に示される画像マーカが認識された場合には、“0100101”というバイナリデータが取得される。画像認識部21は、画像マーカに対応する情報を車両位置測定部22に渡す。
【0045】
車両位置測定部22は、画像マーカデータベース23を参照し、画像認識部21から出力される画像マーカに対応する情報から画像マーカの位置を取得し、当該車両の位置(交差点まで100メートルの地点等)を出力する。
【0046】
画像マーカデータベース23は、図5に示すように、画像マーカに対応する情報(画像マーカデータ)と画像マーカの位置情報の相対を格納するデータベースである。車両位置測定部22は、画像マーカデータをキーとして、この画像マーカデータベース23を参照し、当該画像マーカの位置情報を取得する。
【0047】
〈第一実施形態における作用/効果〉
ここで、上述した第一実施形態における車両位置検出装置の作用及び効果について述べる。
【0048】
第一実施形態における車両位置検出装置では、車載のビデオカメラにより撮影された画
像が画像入力部20から入力され、入力された画像データから画像マーカが認識される。画像認識部21では、画像処理により画像マーカが認識され、画像マーカに対応する情報が取得される。車両位置測定部22では、取得された画像マーカに対応する情報に基づき、画像マーカデータベース23が参照され、画像マーカの位置情報が取得される。
【0049】
このように、第一実施形態における車両位置検出装置では、画像処理により、路上の画像マーカが認識され、当該画像マーカの位置情報により、車両の位置が特定される。
【0050】
よって、磁気マーカ等のように特殊な機能を有するマーカではなく、単に、形態が識別可能な画像マーカにより、車両の位置を特定することが可能となる。
【0051】
[第二実施形態]
次に、本発明の第二実施形態における車両位置検出装置について説明する。第一実施形態は、ビデオカメラが車両の直下を通過する画像マーカを撮影する形態についてのものであった。第二実施形態は、ビデオカメラが車両の前方の画像マーカを撮影する形態についてのものである。
【0052】
図6は、第二実施形態における車両位置検出装置の概要を示す図である。第二実施形態における本車両位置検出装置は、図6に示すように、車両の前方に設置されたビデオカメラ10から、車両前方を通過する画像マーカ15を撮影し、その撮影された画像を用いて位置検出を行う。なお、ビデオカメラ10の設置位置等は、図6に示す位置に限定するものではない。
【0053】
〔装置構成〕
第二実施形態における車両位置検出装置の機能構成について、図7を用いて説明する。図7は、第二実施形態における車両位置検出装置の機能ブロック図である。
【0054】
第二実施形態における車両位置検出装置は、第一実施形態における機能部の他、画像マーカ・車両間距離計算部71(本発明の算出部に相当)を備える。以下に、第二実施形態における車両位置検出装置の各機能部について説明する。なお、第一実施形態と同様の機能部については、説明を省略する。
【0055】
第二実施形態における車両位置検出装置では、ビデオカメラ10が車両前方を撮影しているため、画像入力部20に入力される画像データは、図8に示すような画像となる。図8に示す入力画像の例では、車両前方の画像マーカ81から84が映し出されている。画像入力部20は、当該入力画像を画像認識部21に渡す。
【0056】
画像認識部21は、車両に一番近い位置に写る画像マーカ81を認識する。画像認識部21による画像認識処理については、第一実施形態と同様である。画像認識部21は、認識された画像マーカ81に対応する情報を車両位置測定部22に渡すと共に、画像マーカ・車両間距離計算部71に、認識された画像マーカ81に対応する情報、及び認識された画像マーカ81の画像データ中の位置情報(画像下端部からの位置等)を渡す。
【0057】
画像マーカ・車両間距離計算部71は、画像データ上の位置と車両からの距離の関係を予め保持している。これらは、カメラ設置角、カメラの焦点距離、カメラの設置高さ等によって一意に決まるものであるため、初期設定処理等によって、画像マーカ・車両間距離計算部71に保持されるようにしてもよい。画像マーカ・車両間距離計算部71は、この画像データ上の位置と車両からの距離の関係から、画像マーカと車両との間の距離を計算する。画像マーカ・車両間距離計算部71は、計算された距離を車両位置測定部22に渡す。
【0058】
車両位置測定部22は、画像マーカ・車両間距離計算部71から受けた距離と、画像マーカデータベース内にある画像マーカの位置情報とから、車両位置を算出する。
【0059】
〈第二実施形態における変形例〉
上述の手法では、画像マーカ・車両間距離計算部71は、予め、画像データ上の位置と車両からの距離の関係を保持し、その情報を用いて、画像マーカと車両との間の距離を算出する。ここでは、このような情報を保持せず、当該画像マーカと車両との間の距離を算出する手法について、図9及び10を用いて説明する。図9は、第二実施形態の変形例における入力画像を示す図である。図10は、第二実施形態の変形例における画像マーカ・車両間距離の計算概念を示す図である。
【0060】
この場合、画像認識部21は、車両に一番近い位置に移る画像マーカ81の他、入力画像の垂直方向の中心線より上に映る画像マーカ83及び84を認識する。画像認識部21は、認識された画像マーカ81、83及び84に関し、それぞれ、対応する情報(第一実施形態におけるバイナリデータ等)を取得する。さらに、画像認識部21は、画像マーカ83及び84に関しては、入力画像の垂直方向の中心からの位置情報を取得する(C1、
C2、C3及びC4)。また、画像認識部21は、画像マーカ81に関し、当該入力画像の
垂直方向の中心線からの位置情報(C5)を取得する。
【0061】
画像認識部21は、画像マーカ81に対応する情報を車両位置測定部22に渡すと共に、画像マーカ・車両間距離計算部71へ、画像マーカ81、83、及び84にそれぞれ対応する情報、位置情報C1、C2、C3、C4、及びC5などを渡す。
【0062】
画像マーカ・車両間距離計算部71は、画像認識部21から受けた情報に基づき、まず、図10に示すように、カメラ設置角E、カメラの焦点距離B、カメラの設置高さDを、以下に示す算出処理により求める。
【0063】
画像マーカ83の下端部と車両との距離A1、画像マーカ83の上端部と車両との距離
A2、画像マーカ84の下端部と車両との距離A3、画像マーカ84の上端部と車両との距離A4については、以下に示す関係が成立する。
【0064】
A1=D/(tan(E−tan-1(C1/B))) (式1)
A2=D/(tan(E−tan-1(C2/B))) (式2)
A3=D/(tan(E−tan-1(C3/B))) (式3)
A4=D/(tan(E−tan-1(C4/B))) (式4)
さらに、式1から4により、以下の関係が成立する。
【0065】
(式1)−(式2)=(画像マーカ83の縦の長さ) (式5)
(式2)−(式3)=(画像マーカ83と画像マーカ84との間隔) (式6)
(式3)−(式4)=(画像マーカ84の縦の長さ) (式7)
画像マーカ・車両間距離計算部71は、画像認識部21から受けた画像マーカ83及び84に対応する情報をキーに、画像マーカデータベースを参照することにより、上記(画像マーカ83の縦の長さ)、(画像マーカ83と画像マーカ84との間隔)、(画像マーカ84の縦の長さ)を取得し、取得された情報を式5から7に代入することにより、連立方程式を解く。画像マーカ・車両間距離計算部71は、これにより、カメラ設置角E、カメラの焦点距離B、カメラの設置高さDを取得する。
【0066】
画像マーカ・車両間距離計算部71は、算出された情報(E、B、D)及び画像認識部21から受けた位置情報C5を用いることにより、画像マーカ81と車両との間の距離を
算出する(A5=D/(tan(E−tan-1(C5/B))))。
【0067】
なお、上述の画像マーカ・車両間距離計算部71によるカメラ設置角E、カメラの焦点距離B、カメラの設置高さDの算出は、車両位置算出時に常に実行されてもよいし、所定の周期により処理され、算出結果がメモリ等に保持されるようにし、その保持された情報を用いて、画像マーカと車両との間の距離を算出するようにしてもよい。
【0068】
また、上述の算出では、入力画像の垂直方向の中心からの距離(C1からC4)を用いたが、下端部からの距離、上端部からの距離、その他考えられる位置関係を用いて算出するようにしてもよい。すなわち、上述の算出処理は、入力画像に映し出された複数の画像マーカの位置関係を用いているものであって、それらをどのように使うかを限定するものではない。
【0069】
〈第二実施形態における作用/効果〉
ここで、上述した第二実施形態における車両位置検出装置の作用及び効果について述べる。
【0070】
第二実施形態における車両位置検出装置では、撮影された画像データに映る画像マーカと車両とは一定の距離があるため、画像マーカ・車両間距離計算部71により、その距離が算出される。
【0071】
画像マーカ・車両間距離計算部71では、画像データ上の位置と実際の車両との距離との関係が保持されており、その関係から、認識された画像マーカと車両との間の実距離が算出される。
【0072】
また、変形例としての画像マーカ・車両間距離計算部71では、入力された画像データ上に写る複数の画像マーカの位置、配列等の情報に基づき、画像データ上の位置と実際の車両との距離との関係が算出される。
【0073】
車両位置測定部22は、画像マーカデータベースに格納されている画像マーカの位置情報と、画像マーカ・車両間距離計算部71により算出された距離から、車両の位置を特定する。
【0074】
これにより、ビデオカメラが車両の前方に設置されている場合についても、当該ビデオカメラを利用することにより、第一実施形態と同様の手法で、車両の位置を特定することができる。
【0075】
[第三実施形態]
次に、本発明の第三実施形態における車両位置検出装置について説明する。
【0076】
〔装置構成〕
第三実施形態における車両位置検出装置の機能構成について、図11を用いて説明する。図11は、第三実施形態における車両位置検出装置の機能ブロック図である。
【0077】
第三実施形態における車両位置検出装置は、第一実施形態における機能部の他、画像マーカ配列記憶部111(本発明の格納部に相当)を備える。以下に、第三実施形態における車両位置検出装置の各機能部について説明する。なお、第一実施形態と同様の機能部については、説明を省略する。第三実施形態における車両位置検出装置では、ビデオカメラ10が車両直下に通過する画像マーカを撮影する構成を例に挙げる(図1参照)。
【0078】
第三実施形態における画像マーカデータベース23には、個々の画像マーカを示す情報の配列とその配列が示す位置情報とが関連付けられ格納される。まず、この画像マーカデータベース23に格納されるデータの概念について、図12及び13を用いて説明する。図12は、第三実施形態における画像マーカ配列の概念を示す図である。図13は、第三実施形態における画像マーカデータベース構成の概念を示す図である。
【0079】
例えば、路上に画像マーカA、B、C、D、Eが車両の進行方向(図の左から右への方向)へ、A->D->B->C->B->Eの順で設置されている地点を考える。この場合、画像マーカデータベース23には、図13に示すようなデータが格納される。画像マーカデータベース23には、画像マーカが「A->D->B」の順で認識された場合「地点1」を示し、画像マーカが「D->B->C」の順で認識された場合「地点2」を示すといった情報が格納される。すなわち、画像マーカデータベース23には、画像マーカの配列に基づき車両の位置を特定するための情報が格納される。
【0080】
また、画像マーカにM系列(Maximum Length Sequence)を利用した場合の例を図14
及び15に示す。図14は、第三実施形態における画像マーカ配列の例を示す図である。図15は、第三実施形態における画像マーカデータベース構成の例を示す図である。図14の例では、画像マーカ15は、「1」に対応するものと、「0」に対応するものが所定のM系列を利用した形で配列されている。この場合、画像マーカデータベース23には、図15に示すように、画像マーカ配列「1101」に対応する位置情報が「地点1」として登録され、画像マーカ配列「1010」に対応する位置情報が「地点2」として登録される。
【0081】
更に、画像マーカとして、第一実施形態における画像マーカ15を採用した場合の例を図16及び17を用いて説明する。図16は、第三実施形態における画像マーカ配列の例を示す図である。図17は、第三実施形態における画像マーカデータベース構成の例を示す図である。この場合、各画像マーカは7ビットの情報に対応付けられるため、画像マーカデータベース23には、7ビット情報を3つ持つ画像マーカ配列が、位置情報と関連付けられる。
【0082】
以下に述べる他の機能部の説明は、図17に示す例の画像マーカデータベース23を有する場合のものである。
【0083】
画像入力部20には、図16に示す画像マーカをビデオカメラ10によって撮影した画像が逐次、入力される。画像入力部20は、入力された画像データを画像認識部21に渡す。
【0084】
画像認識部21は、画像入力部20から画像データを受けると、第一実施形態で述べたように、受けた画像マーカの形態に対応する数値情報を取得する。画像認識部21は、画像マーカに対応する情報を画像マーカ配列記憶部111に渡す。
【0085】
画像マーカ配列記憶部111は、画像認識部21から受けた画像マーカに対応する情報と共に、記憶されている前回までの画像マーカに対応する情報の配列を車両位置測定部22に渡す。画像マーカ配列記憶部111は、今回画像認識部21から受けた画像マーカに対応する情報を前回までの情報と共に記憶する。なお、本実施形態では、最新の情報の他、2つ前までの情報を以って画像マーカ配列とするが、これに限定するものではなく、より複数の情報を使って画像マーカ配列としてもよい。
【0086】
車両位置測定部22は、画像マーカデータベース23を参照し、画像認識部111から出力される画像マーカ配列から位置情報を取得し、当該車両の位置(地点1等)を出力
する。
【0087】
〈第三実施形態の変形例〉
上述の第三実施形態における車両位置検出装置では、ビデオカメラ10が車両直下に通過する画像マーカを撮影する構成を例(図1参照)に挙げたが、第二実施形態における構成を用いるようにしてもよい。この場合、図6に示すように、車両の前方に設置されたビデオカメラ10から、車両前方を通過する画像マーカ15を撮影し、その撮影された画像を用いて位置検出を行う。
【0088】
この場合の車両位置検出装置の構成例を図18に示す。図18は、第三実施形態における車両位置検出装置の変形例を示す図である。すなわち、この場合の車両位置検出装置は、第三実施形態における装置構成に、第二実施形態における画像マーカ・車両間距離計算部71を付加した構成となる。
【0089】
画像マーカデータベース23には、画像マーカ配列と位置情報との関連付け情報の他、各画像マーカの縦の長さ、各画像マーカ間の間隔等が記憶される。
【0090】
画像マーカ・車両間距離計算部71は、第二実施形態と同様の処理により、カメラ設置角E、カメラの焦点距離B、カメラの設置高さD等を取得し、例えば、入力画面中の最も近い位置に写る画像マーカと車両との間の距離を算出する。
【0091】
車両位置測定部22は、画像マーカ・車両間距離計算部71から受ける画像マーカと車両との間の距離と、当該画像マーカ配列により画像マーカデータベース23から取得される位置情報とから、車両の位置を特定する。
【0092】
〈第三実施形態における作用/効果〉
ここで、上述した第三実施形態における車両位置検出装置の作用及び効果について述べる。
【0093】
第三実施形態における車両位置検出装置では、画像マーカ配列記憶部111に、認識された画像マーカの形態に対応する数値情報が逐次記憶される。また、画像マーカデータベース23には、当該画像マーカの配列とその配列に対応する位置情報とが格納されている。
【0094】
これにより、本実施形態における車両位置検出装置では、最新の認識された画像マーカを含んだ当該画像マーカ配列に基づき、車両の位置情報が決定される。
【0095】
従って、本実施形態における車両位置検出装置によれば、画像マーカの種類、すなわち、画像マーカに持たせる情報を少なくすることができる。よって、画像マーカ認識処理の負荷を抑えることができ、画像マーカのサイズも小さくすることができる。
【0096】
[第四実施形態]
次に、本発明の第四実施形態における車両位置検出装置について説明する。
【0097】
図19は、第四実施形態における車両位置検出装置の概要を示す図である。本車両位置検出装置は、図19に示すように、例えば、道路等に設置されたビデオカメラ10(本発明の撮像部に相当)から、車両に備え付けられた画像マーカ15を撮影し、その撮影された画像を用いて位置検出を行う。なお、ビデオカメラ10の設置位置等は、図19に示す位置に限定するものではなく、車両の画像マーカ15を撮影可能な位置であればどこでもよい。
【0098】
〔装置構成〕
第四実施形態における車両位置検出装置の機能構成について、図20を用いて説明する。図20は、第四実施形態における車両位置検出装置の機能ブロック図である。
【0099】
第四実施形態における車両位置検出装置は、車両以外の場所に、画像入力部201(本発明の入力部に相当)、画像認識部202(本発明の認識部に相当)、識別情報取得部203(本発明の取得部に相当)、画像マーカデータベース204(本発明の記憶部に相当)、及び情報送信部205(本発明の送信部に相当)を備え、車両に、情報受信部206(本発明の受信部に相当)、車両位置測定部207(本発明の決定部に相当)、及び位置情報データベース208を備える。車両以外の場所とは、路上、信号機、電柱等、車両と隣接する場所が考えられる。画像マーカ15の構成については、第一実施形態と同様であるため、説明を省略する。
【0100】
画像入力部201には、画像マーカ15をビデオカメラ10によって撮影した画像が逐次、入力される。画像入力部201は、入力された画像データを画像認識部202に渡す。
【0101】
画像認識部202は、画像入力部201から画像データを受けると、画像データ中にある画像マーカの形状を認識する。画像認識部202による画像認識処理については、第一実施形態と同様である。画像認識部202は、当該画像認識処理により当該画像マーカの形態に対応する数値情報を取得し、識別情報取得部203に渡す。
【0102】
画像マーカデータベース204には、画像マーカの形態に対応する数値情報とその数値情報に対応する車両の識別情報が格納されている。識別情報取得部203は、画像マーカデータベース204を参照することにより、画像マーカの形態に対応する情報から車両の識別情報を取得し、情報送信部205に出力する。
【0103】
情報送信部205は、識別情報取得部203から受けた車両の識別情報と自装置を示す識別情報を車両に送信する。この送信されたデータを受信する情報受信部206は、情報送信部205と無線により通信する。無線通信の規格については、何ら制限するものではない。
【0104】
車両に搭載された情報受信部206は、情報送信部205から送信され、アンテナ等により取得された、当該装置を示す識別情報と車両の識別情報を受信する。受信された情報は、車両位置測定部207に出力される。
【0105】
位置情報データベース208には、情報送信部205から送信される当該装置を示す識別情報とその識別情報に対応する位置情報とが格納されている。
【0106】
車両位置測定部207は、受信された車両の識別情報から、当該受信された情報が自車両に関する情報か否かを判断する。車両位置測定部207は、例えば、各車両にそれぞれ搭載されるメモリに予め記憶された自車両を示す識別情報と、情報受信部206で受信された車両の識別情報とを比較し、一致した場合に自車両に関する情報であると判断する。車両位置測定部207は、受信された情報が自車両に関する情報であると判断すると、当該装置を示す識別情報を位置情報データベースに問い合わせることにより、当該路上に設置された装置の位置を取得し、車両の位置とする。
【0107】
なお、画像マーカの形態に対応する情報を車両の識別情報とみなし、情報送信部205から車両の識別情報を送信する代わりに、画像マーカの形態に対応する情報を送信するよ
うにしてもよい。この場合には、画像マーカデータベース204は不要となる。そして、車両位置測定部207は、受信された画像マーカの形態に対応する情報から、自車両に関する情報であるか否かを判断する。
【0108】
〈第四実施形態の変形例〉
上述の第四実施形態における車両位置検出装置では、情報送信部205が路上に設置された装置を示す識別情報を車両に送信する構成を採るが、情報送信部205から送信される情報として、当該装置の位置情報を送信するようにしてもよい。
【0109】
この場合の車両位置検出装置の機能ブロックを図21に示す。図21に示される第四実施形態における車両位置検出装置では、車両に備え付けられる車両位置検出装置には、車両位置測定部207及び位置情報データベース208に相当する機能部は省かれている。
【0110】
情報送信部205は、メモリ等に格納された自身の位置情報を読み出し、車両の識別情報若しくは画像マーカの形態に対応する情報と共に、送信する。これらの情報を受信した情報受信部206は、車両の識別情報若しくは画像マーカの形態に対応する情報から、自車両に関する情報か否かを判断する。情報受信部206は、自車両に関する情報であると判断すると、受信された位置情報により、車両の位置を特定する。
【0111】
〈第四実施形態における作用/効果〉
ここで、上述した第四実施形態における車両位置検出装置の作用及び効果について述べる。
【0112】
第四実施形態における車両位置検出装置では、画像マーカが車両に搭載され、路上に設置されたビデオカメラで撮影される。撮影された画像マーカが画像認識部202により認識されると、画像マーカデータベース204から当該画像マーカに対応する車両の識別情報が取得される。取得された車両の識別情報は、路上に設置された本装置を示す識別情報と共に、情報送信部205から送信される。
【0113】
当該車両の識別情報と本装置を示す識別情報とが情報受信部206により受信されると、車両位置測定部207では、これら受信された情報が自車両のための情報であるか否かが、受信された車両の識別情報に基づき判断される。当該受信された情報が自車両のための情報であると判断されると、位置情報データベース208が参照され、受信された本装置を示す識別情報により、本装置の位置情報が取得される。第四実施形態における車両位置検出装置では、取得された本装置の位置情報が車両の位置として特定される。
【0114】
また、第四実施形態における車両位置検出装置の変形例では、車外に設置された装置から送信される情報のうち、当該本装置を示す識別情報の代わりに、当該本装置の位置情報が送信される。これにより、受信側となる車載装置では、他の処理がなされることなく、受信された情報がその車両の位置として特定される。
【0115】
[第五実施形態]
次に、本発明の第五実施形態における衝突回避装置について説明する。第五実施形態における衝突回避装置は、上述の第一実施形態から第四実施形態における車両位置検出装置から出力される位置情報を利用して、車両の衝突を回避する。
【0116】
図22は、第五実施形態における衝突回避装置の概要を示す図である。本衝突回避装置を搭載した車両221と車両222とは、自身で検出された位置情報をお互いにやりとりすることにより、衝突を回避する。
【0117】
〔装置構成〕
第五実施形態における衝突回避装置の機能構成について、図23を用いて説明する。図23は、第五実施形態における衝突回避装置の機能ブロック図である。
【0118】
第五実施形態における衝突回避装置は、車両位置検出装置231、距離計算部232(本発明の距離計算部に相当)、通信部233(本発明の通信部に相当)、衝突判定部234(本発明の衝突判定部に相当)、及び衝突警報・回避部235(本発明の制御部に相当)を備える。車両位置検出装置231は、上述の第一実施形態から第四実施形態のいずれかの方法により、画像マーカから自車両の位置を検出し、距離計算部232に出力する。
【0119】
距離計算部232は、車両位置検出装置231から受ける自車両の位置情報から交差点までの距離を計算する。距離計算部232は、例えば、メモリに格納されている地図情報等を利用して、位置情報から交差点までの距離を計算する。なお、車両位置検出装置231から、直接現在の位置から交差点までの距離情報を受けるようにしてもよいし、交差点等に設置された通信装置から通信部233を経由して入力されるようにしてもよい。距離計算部232は、算出された交差点までの距離情報を衝突判定部234と通信部233に渡す。
【0120】
通信部233は、同じ交差点に進入し交差する可能性のある車両へ、自車両の交差点までの距離及び車両速度を送信する。また、通信部233は、同じ交差点に進入し交差する可能性のある相手車両から、相手車両における交差点までの距離及び車両速度を受信する。通信部233は、受信された相手車両における交差点までの距離及び車両速度を衝突判定部234に出力する。
【0121】
衝突判定部234は、距離計算部232から受ける自車両の交差点までの距離、及び自車両に搭載される車速センサ236から受ける車両速度と、通信部233から受ける相手車両の交差点までの距離及び車両速度とから、当該交差点における衝突の可能性を判断する。この衝突可能性の判断には、衝突の可能性があると判断される所定の閾値(例えば、5秒後の両車両間の距離が2メートル以内)が予めメモリ等に格納されており、そのような所定の閾値に基づいて判断されるようにしてもよい。衝突判定部234は、判定された衝突可能性を衝突警報・回避部235に渡す。
【0122】
衝突警報・回避部235は、衝突の可能性があると判定されている場合に、警報発生やブレーキ等の衝突回避動作処理を行う。衝突警報・回避部235は、例えば、衝突判定部234から受ける情報を所定の警報レベルに分け、その警報レベルに応じた処理を行うようにしてもよい。
【0123】
なお、上述の装置構成では、車両221と車両222とが直接通信する例を示したが、図24に示すように、交差点等に設置された衝突監視装置241を経由して、交差点までの距離情報や車速度情報等をやりとりするようにしてもよい。この場合には、図23に示す衝突回避装置の機能部のうち、車両には、車両位置検出装置231及び通信部233のみ備えるようにし、衝突監視装置241に、距離計算部232及び衝突判定部234を持たせるようにしてもよい。その場合、車両における車両位置検出装置231から出力される位置情報が通信部233から衝突監視装置241に送信され、衝突監視装置223の距離計算部232及び衝突判定部234により衝突判定情報が出力される。この衝突判定情報は、再度、車両に送信され、車両によって衝突回避制御がなされるようにしてもよい。
【0124】
〈第五実施形態における作用/効果〉
ここで、上述した第五実施形態における衝突回避装置の作用及び効果について述べる。
【0125】
第五実施形態における衝突回避装置では、他の実施形態における車両位置検出装置が出力する車両の位置情報から交差点までの距離を算出し、この算出された距離情報と、車速度情報とを、車両間相互に通信する。
【0126】
衝突判定部では、自車両に関する当該交差点までの距離及び車速度と、受信された他の車両に関するそれら情報とに基づき、当該交差点における衝突の可能性が判定される。この衝突の可能性の判定から、衝突警報・回避部235が所定の衝突回避動作制御を行う。
【0127】
このように、本実施形態における衝突回避装置では、上述の実施形態の車両位置検出装置により検出された車両の位置情報が利用されることにより、他の車両との衝突可能性が判定される。これにより、検出された車両位置が安全な車両運転を可能とするシステムに利用することができる。
【0128】
[第六実施形態]
次に、本発明の第六実施形態における障害物検知装置について説明する。第六実施形態における障害物検知装置では、図25に示すような、路上にある障害物256が検知される。図25は、左に、障害物がない状態での路上に並ぶ画像マーカ251から255を示し、右に、障害物256が画像マーカ253上に存在する場合の例を示す。本障害物検知装置は、画像マーカの配列、画像マーカの位置等の情報をデータベースに格納し、あるべき位置に画像マーカが認識されない場合に、障害物が存在する可能性があると判断するものである。
【0129】
〔装置構成〕
第六実施形態における障害物検知装置の機能構成について、図26を用いて説明する。図26は、第六実施形態における障害物検知装置の機能ブロック図である。
【0130】
第六実施形態における車両位置検出装置は、画像入力部20、画像認識部21、車両位置測定部22、画像マーカデータベース23、画像マーカ・車両間距離計算部71、及び障害物検知部261を備える。以下に、第六実施形態における障害物検知装置の各機能部について説明する。
【0131】
第六実施形態における障害物検知装置では、ビデオカメラが車両前方を撮影するように設置されている場合を想定しており、画像入力部20に入力される画像データは、複数の画像マーカが映し出される状態となっている。画像入力部20は、当該入力画像を画像認識部21に渡す。
【0132】
画像認識部21は、画像入力部20から受けた画像データから、映し出された複数の画像マーカを認識する。個々の画像マーカに関する画像認識処理については、第一実施形態に説明したとおりである。画像認識部21は、認識された複数の画像マーカに対応する数値情報を車両位置測定部22に渡すと共に、画像マーカ・車両間距離計算部71に、認識された画像マーカに対応する数値情報、及び認識された画像マーカの画像データ中の位置情報(画像下端部からの位置等)を渡す。
【0133】
車両位置測定部22は、画像マーカ・車両間距離計算部71と共に、車両位置測定処理を実行する。この処理については、第一及び二実施形態で説明したとおりであり、ここでは説明を省略する。
【0134】
車両位置測定部22は、車両位置測定処理に加えて、画像認識部21から受けた複数の画像マーカに対応する数値情報に基づき、画像マーカデータベースからそれら画像マーカの位置を取得する。車両位置測定部22は、車両位置の情報と共に、認識された複数の画
像マーカそれぞれの位置情報を障害物検知部261に渡す。
【0135】
障害物検知部261は、認識された複数の画像マーカそれぞれの位置情報から、画像マーカデータベース23を参照し、本来認識されるべき画像マーカで認識されていない画像マーカがないかを探す。例えば、障害物検知部261は、図25の例によれば、画像データとして、画像マーカ254、252、及び251が認識されている。障害物検知部261は、認識されている画像マーカ254、252、及び251それぞれの位置情報のうち、車両に最も近い画像マーカ254の位置情報と、最も遠い位置にある画像マーカ251の位置情報とから、画像マーカデータベース23を参照することにより、両画像マーカの間に位置すべき画像マーカを検索する。障害物検知部261は、この検索により画像マーカ252及び253が存在することを認知する。これにより、障害物検知部261は、入力画像データに、画像マーカ253が存在しないことを検知する。
【0136】
障害物検知部261は、認識されるべき画像マーカで認識されていないものがあると検知すると、その画像マーカ上に障害物がある可能性があると判断する。障害物検知部261は、認識されていない画像マーカ253の位置情報を画像マーカデータベース23から取得し、その位置情報と、車両の位置情報とから、その障害物への接近度を判定する。障害物検知部261は、所定の距離以上接近したと判断すると、障害物警報発生、ブレーキ等の所定の障害物回避動作制御を行うよう、所定の機能部に指示する。なお、障害物検知部261の最終的な出力(所定の機能部への指示)は、本実施形態により限定するものではない。
【0137】
〈第六実施形態における作用/効果〉
ここで、上述した第六実施形態における障害物回避装置の作用及び効果について述べる。
【0138】
第六実施形態における障害物回避装置では、画像認識部21により複数の画像マーカが認識され、それらが利用され、車両位置測定部22、画像マーカ・車両間距離計算部71により車両の位置情報が取得される。
【0139】
また、障害物検知部261では、認識された複数の画像マーカに関する位置情報から、画像マーカデーベースを参照することにより、認識されるべき画像マーカで認識されていない画像マーカが検知され、その画像マーカの位置情報が取得される。
【0140】
これにより、認識されるべき画像マーカで認識されていない画像マーカの位置情報と、同じく画像マーカにより特定された車両の位置情報とから、障害物回避制御がなされる。
【0141】
このように、本実施形態における障害物回避装置では、認識されない画像マーカをもって、障害物が検知され、当該障害物が自動回避される。
【0142】
従って、当該画像マーカを用いることにより、車両の位置情報を取得するとともに、障害物を回避することもできるようになる。
【0143】
[第七実施形態]
次に、本発明の第七実施形態における車両位置検出装置について説明する。
【0144】
〔装置構成〕
第七実施形態における車両位置検出装置の機能構成について、図27を用いて説明する。図27は、第七実施形態における車両位置検出装置の機能ブロック図である。
【0145】
第七実施形態における車両位置検出装置は、画像入力部20、画像認識部21、画像マーカエラー検出訂正部271、画像マーカ間距離測定部272、画像マーカ間距離計算部273、車両位置測定部22、画像マーカデータベース23を備える。以下に、第七実施形態における車両位置検出装置の各機能部について説明する。
【0146】
画像入力部20、画像認識部21については、第一実施形態等と同様であるため、説明を省略する。画像認識部21は、認識された画像マーカに対応する情報を画像マーカエラー検出訂正部271、及び画像マーカ間距離計算部273にそれぞれ渡すと共に、画像マーカが認識された旨を画像マーカ間距離測定部272に通知する。
【0147】
画像マーカ間距離測定部272は、画像認識部21からの画像マーカ認識通知と、車速センサ274からの車速情報とに基づき、画像マーカ間の距離を測定する。画像マーカ間距離測定部272は、画像マーカ認識通知を受けたときから次の通知を受けるまでの間の時間を計測し、さらに、その間の車速情報とから、画像マーカ間の距離を測定する。画像マーカ間距離測定部272は、測定された画像マーカ間の距離を画像マーカエラー検出訂正部271に渡す。
【0148】
画像マーカ間距離計算部273は、画像認識部21から受ける画像マーカに対応する数値情報に基づき、画像マーカデータベース23から、当該画像マーカの位置情報を取得する。画像マーカ間距離計算部273は、前回認識された画像マーカの位置情報を記憶しており、それと今回取得された画像マーカの位置情報とから、画像マーカ間距離を計算する。画像マーカ間距離計算部273は、算出された画像マーカ間距離を画像マーカエラー検出訂正部271に渡す。
【0149】
画像マーカエラー検出訂正部271は、画像マーカ間距離測定部272により測定された画像マーカ間距離と、画像マーカ間距離計算部273により算出された画像マーカ間距離とを比較する。画像マーカエラー検出訂正部271は、この比較において、両者が異なる場合には、画像マーカ間距離測定部272の結果が正しいと判断し、画像マーカ間距離測定部272からの画像マーカ間距離に対応する画像マーカを画像マーカデータベース23から検索する。画像マーカエラー検出訂正部271は、検索された正しい画像マーカ情報を車両位置測定部22に渡す。
【0150】
画像マーカの読み取りエラーが生じると画像マーカデータベースから計算される画像マーカ間距離は車速センサにより計測される距離とは大きく異なる一方、車速センサによる距離計測が画像マーカ間距離を測定するには十分な精度であると考えられるため、車速を優先適用するようにする。
【0151】
また、画像マーカ間距離測定部272と画像マーカ間距離計算部273との結果が同じ場合には、画像マーカエラー検出訂正部271は、画像認識部21から出力された画像マーカ情報を訂正せずに車両位置測定部22に渡す。
【0152】
車両位置測定部22は、画像マーカデータベース23を参照し、画像マーカエラー検出訂正部271から出力される画像マーカに対応する情報から画像マーカの位置を取得し、当該車両の位置(交差点まで100メートルの地点等)を出力する。
【0153】
〈第七実施形態における作用/効果〉
ここで、上述した第七実施形態における車両位置検出装置の作用及び効果について述べる。
【0154】
第七実施形態における車両位置検出装置では、第一実施形態と同様に、ビデオカメラに
より撮影された画像データが画像入力部20に入力され、画像認識部21によりその画像データから画像マーカが認識される。
【0155】
画像マーカ間距離測定部272では、車速センサ274からの車速情報と画像認識部21からの画像マーカ認識通知とから、画像マーカ間距離が測定される。
【0156】
一方、画像マーカ間距離計算部273では、画像マーカデータベース23が参照され、画像認識部21により認識された画像マーカ情報に基づく位置情報から、画像マーカ間距離が計算される。
【0157】
画像マーカエラー検出訂正部271では、画像マーカ間距離測定部から出力される画像マーカ間距離の測定値と画像マーカ間距離計算部から出力される画像マーカ間距離の計算値を比較して、両者の値が異なる場合に、当該画像マーカの誤認識が検知される。すなわち、画像マーカの読み取りエラーを検出するため、車速センサから得られる画像マーカ間距離とデータベースに格納されている画像マーカの位置情報から計算される画像マーカ間距離を比較し、異なる場合に画像マーカ間距離計算部からの画像マーカの位置を参照して正しい画像マーカの種類を車両位置測定部に出力する。
【0158】
〈第七実施形態の変形例〉
上述の第七実施形態における車両位置検出装置では、ビデオカメラ10が車両直下に通過する画像マーカを撮影する構成を例(図1参照)に挙げたが、第二実施形態における構成を用いるようにしてもよい。この場合、図6に示すように、車両の前方に設置されたビデオカメラ10から、車両前方を通過する画像マーカ15を撮影し、その撮影された画像を用いて位置検出を行う。
【0159】
この場合の車両位置検出装置の構成例を図28に示す。図28は、第七実施形態における車両位置検出装置の変形例を示す図である。すなわち、この場合の車両位置検出装置は、第七実施形態における装置構成に、第二実施形態における画像マーカ・車両間距離計算部71を付加した構成となる。
【0160】
画像マーカデータベース23には、画像マーカ配列と位置情報との関連付け情報の他、各画像マーカの縦の長さ、各画像マーカ間の間隔等が記憶される。
【0161】
画像マーカ・車両間距離計算部71は、第二実施形態と同様の処理により、カメラ設置角E、カメラの焦点距離B、カメラの設置高さD等を取得し、例えば、入力画面中の最も近い位置に写る画像マーカと車両との間の距離を算出する。
【0162】
車両位置測定部22は、画像マーカ・車両間距離計算部71から受ける画像マーカと車両との間の距離と、当該画像マーカ配列により画像マーカデータベース23から取得される位置情報とから、車両の位置を特定する。
【0163】
[第八実施形態]
次に、本発明の第八実施形態における車両位置検出装置について説明する。
【0164】
〔装置構成〕
第八実施形態における車両位置検出装置の機能構成について、図29を用いて説明する。図29は、第八実施形態における車両位置検出装置の機能ブロック図である。第八実施形態における車両位置検出装置は、画像入力部を複数有する(画像入力部20、291及び292)こと以外、第一実施形態と同様の構成を備える。以下に、第八実施形態における車両位置検出装置の各機能部について説明する。なお、第一実施形態と同様の機能部に
ついては、説明を省略する。
【0165】
画像入力部20、291及び292はそれぞれ、車両に搭載されたビデオカメラにより撮影された、画像データを画像認識部21に出力する。
【0166】
画像認識部21は、画像入力部20、291及び292から出力されたそれぞれの画像データに対してそれぞれ画像処理を行い、それぞれの画像マーカの種類を認識する。画像認識部21は、画像マーカに対応する数値情報をそれぞれ車両位置測定部22に出力する。
【0167】
車両位置測定部22は、画像認識部21から受けた画像マーカに対応する数値情報を比較し、画像マーカを正しく認識しているものを選択する。車両位置測定部22は、選択された画像マーカに対応する情報に基づき、画像マーカデータベース23を参照することにより画像マーカの位置情報を取得し、車両位置検出結果として出力する。
【0168】
なお、上述の構成では、複数の画像入力部20、291及び292からの画像データが同時に利用されるが、画像入力部20、291及び292の画像取り込みタイミングが異なるようにしてもよい。図30は、画像入力部20、291及び292の画像取り込みタイミングが等間隔で異なる場合の例による取り込みタイミングを示す図である。
【0169】
図30に示すように等間隔で異なる時間で画像入力部20、291及び292から画像データが取り込まれる場合、その間隔で、車両位置測定がなされるようにしてもよい。それにより、図30に示すタイミングの場合、画像入力部の画像取り込みタイミングの3倍のフレームレートで画像を取り込むことが可能となり、高精度の車両位置検出が可能となる。
【0170】
〈第八実施形態における作用/効果〉
ここで、上述した第八実施形態における車両位置検出装置の作用及び効果について述べる。
【0171】
第八実施形態における車両位置検出装置では、複数のビデオカメラから入力される画像データに対しそれぞれ、画像処理がなされ、画像マーカがそれぞれ認識される。そして、複数の画像データから認識された情報を基に、正しいと認識された画像マーカ情報を用いて、車両位置を特定する。
【0172】
これにより、1つの画像入力部が障害物のために画像マーカを撮影できなかったとしても他の画像入力部で撮影された画像データを利用することができる。この結果、複数の入力画像を使用することにより高信頼、高精度の画像マーカの認識が可能となり、高信頼、高精度の車両位置検出が可能となる。
【0173】
〈第八実施形態の変形例〉
上述の第八実施形態における車両位置検出装置では、画像入力部20、291及び292が出力する画像データは、画像認識部21により取得されていたが、画像認識部を画像入力部それぞれに対応するように備えるようにしてもよい(画像認識部21、311、及び312)。
【0174】
この場合の車両位置検出装置の機能ブロックを図31に示す。画像認識部311は、画像入力部291からの画像データを受け、画像マーカを認識する。同様に、画像認識部21は、画像入力部20からの画像データを受け、画像マーカを認識する。画像認識部312は、画像入力部292からの画像データを受け、画像マーカを認識する。
【0175】
これら画像認識部21、311及び312からそれぞれ出力される画像マーカ認識結果を基に、車両位置測定部22では、正しく認識された画像マーカを特定し、その画像マーカを利用することにより、車両位置を測定する。
【0176】
[第九実施形態]
次に、本発明の第九実施形態における車両位置検出装置について説明する。
【0177】
図32は、第九実施形態における車両位置検出装置の概要を示す図である。本車両位置検出装置は、図32に示すように、特定の位置に設置されたビデオカメラ10から、路上等に備え付けられた複数の画像マーカ15を撮影し、その撮影された画像を用いて位置検出を行う。すなわち、本車両位置検出装置は、図32に示す321から322の範囲を撮影範囲とし、その撮影範囲に入るべき画像マーカで撮影されていない画像マーカを認識することにより、車両の位置を特定するものである。なお、ビデオカメラ10の設置位置等は、図32に示す位置に限定するものではなく、路上等に設置された画像マーカ15を俯瞰撮影可能な位置であればどこでもよい。
【0178】
〔装置構成〕
第九実施形態における車両位置検出装置の機能構成について、図33を用いて説明する。図33は、第九実施形態における車両位置検出装置の機能ブロック図である。
【0179】
第九実施形態における車両位置検出装置は、画像入力部331、画像認識部332、画像マーカ位置測定部333、画像マーカデータベース334、車両位置検知部335、及び画像マーカ位置記憶部336を備える。
【0180】
画像入力部331には、複数の画像マーカ15をビデオカメラ10によって撮影した画像が逐次、入力される。画像入力部331は、入力された画像データを画像認識部332に渡す。
【0181】
画像認識部332は、画像入力部331から画像データを受けると、画像データ中にある複数の画像マーカの形状についてそれぞれ認識する。画像認識部332による画像認識処理については、第一実施形態等と同様である。画像認識部332は、当該画像認識処理により当該画像マーカの形態に対応する数値情報をそれぞれ取得し、画像マーカ位置測定部333に渡す。
【0182】
画像マーカ位置測定部333は、画像マーカデータベース334を参照することにより、画像認識部332から受けた画像マーカの形態に対応した数値情報から、画像マーカの位置情報を取得する。画像マーカ位置測定部333は、取得された複数の画像マーカに対応する位置情報を車両位置検知部335に出力する。
【0183】
車両位置検知部335は、画像マーカ位置測定部333から受けた画像マーカの位置情報を、画像マーカ位置記憶部336に記憶する。車両位置検出部335は、画像マーカ位置記憶部336に記憶された画像マーカの位置と、画像マーカ位置測定部333から入力される画像マーカの位置とを比較することにより、認識されていない画像マーカを特定する。車両位置検知部335は、特定された画像マーカを車両によって隠れている画像マーカであると認識し、その画像マーカの位置を車両の位置情報として出力する。
【0184】
〈第九実施形態における作用/効果〉
ここで、上述した第九実施形態における車両位置検出装置の作用及び効果について述べる。
【0185】
第九実施形態における車両位置検出装置では、複数の画像マーカ15を固定で撮影するビデオカメラから画像データが入力される。入力された画像データに含まれる画像マーカは、画像認識部332により認識され、画像マーカの形態に対応する情報が特定される。
【0186】
画像マーカ位置測定部333では、当該認識された画像マーカの形態に対応する情報に基づき、それに対応する位置情報が画像マーカデータベース334から取得され、この取得された位置情報は、画像マーカ位置記憶部336に記憶される。
【0187】
車両位置検知部335では、今回取得された画像マーカ15の位置情報と、画像マーカ位置記憶部336に記憶される位置情報とを比較することにより、今回認識されていない画像マーカがあるか否かが判断される。今回認識されていない画像マーカがあると判断されると、当該画像マーカの位置情報を車両の位置として特定する。
【0188】
このように、第九実施形態における車両位置検出装置では、信号機や電柱等の路上に固定で設置されるビデオカメラで、常時画像マーカを認識、特定し、認識されない画像マーカがあると判断した場合に、その画像マーカの位置情報を当該車両の位置とする。
【0189】
これにより、画像マーカを用いた車両位置検出が交通制御システム等に用いることも可能となる。
【0190】
[上述の実施形態における変形例]
上述の実施形態では、画像マーカは、図2に示すような形態のものについて言及したが、図34に示すように、他の様々な形態により特定されるようにしてもよい。図34は、画像マーカの変形例を示す。
【0191】
画像マーカは、形状、模様、色、輝度等、画像処理され、画像マーカの種類を特定できるものであれば、どのような形態を持つものでもよい。また、画像マーカは、形状、色、輝度の相違を単独で利用したものだけでなく、複数の形態を組み合わせて、個々を特定するようにしてもよい。例えば、形状と色との組み合わせにより特定されるようにしてもよい。
【0192】
また、図35に示すように、連続した画像マーカを用いるようにしてもよい。
【0193】
[その他]
本実施形態は次の発明を開示する。各項に開示される発明は、必要に応じて可能な限り組み合わせることができる。
【0194】
(付記1)
車両周辺の映像を撮影する撮像部と、
撮影された映像を画像データとして取り込む入力部と、
前記画像データの中から所定の形状を持つ指標を認識し、認識された指標の種類を特定する認識部と、
前記指標の種類とその指標の種類に対応する位置情報とを記憶する記憶部と、
特定された指標の種類に基づき、前記記憶部から位置情報を取得する取得部と、
取得された位置情報により車両の位置を決定する決定部と、
を備える車両位置検出装置。
【0195】
(付記2)
前記認識部は、前記画像データの中から、前記指標の種類を特定すると共に、認識され
た指標の画像データ上の位置及び大きさを認識し、
前記記憶部は、前記指標の種類に対応する位置情報の他、その指標の大きさと、隣接する他の指標との間隔を記憶し、
前記取得部は、前記位置情報の他、該指標の大きさと、隣接する他の指標との間隔を取得し、
前記決定部は、取得された指標の大きさと隣接する他の指標との間隔に基づき、車両から、該指標までの距離を算出する算出部を更に備え、算出された該指標までの距離と、前記位置情報とから、車両の位置を決定する、
付記1に記載の車両位置検出装置。
【0196】
(付記3)
前記認識部により特定された指標の種類を連続した並びで格納する格納部を更に備え、
前記記憶部は、幾つか連続した前記指標の種類の並びと、その並びに対応する前記位置情報とを記憶し、
前記取得部は、前記格納部に格納された指標の種類の並びに基づき、前記記憶部から、その並びに対応する前記位置情報を取得する、
付記1又は2に記載の車両位置検出装置。
【0197】
(付記4)
車両が通過する地点周辺を撮影する撮像部と、
撮影された映像を画像データとして取り込む入力部と、
前記画像データの中から、前記車両に搭載され所定の形状を持つ指標を認識し、認識された指標の種類を特定する認識部と、
前記指標の種類と、その指標の種類に対応する車両の識別情報とを記憶する記憶部と、
特定された指標の種類に基づき、前記記憶部から車両の識別情報を取得する取得部と、
前記取得された車両の識別情報と自装置に関する位置情報とを送信する送信部と、
を備える車両位置検出装置。
【0198】
(付記5)
自車両を識別するための所定の形状を持つ指標を有する車両に搭載された車両位置検出装置であって、
前記指標に基づき車両を特定可能な他の装置から、車両を識別する車両識別情報と、前記他の装置に関する位置情報とを受信する受信部と、
前記車両識別情報から、受信された位置情報が自車両のための情報であると判断された場合に、当該受信された位置情報から自車両の位置を決定する決定部と、
を備える車両位置検出装置。
【0199】
(付記6)
前記送信部は、自装置に関する位置情報に代え、自装置の固有の識別情報を送信する、
付記4に記載の車両位置検出装置。
【0200】
(付記7)
前記受信部は、前記他の装置に関する位置情報に代え、前記他の装置を識別する装置識別情報を受信し、
前記決定部は、前記装置識別情報とその装置識別情報に対応する位置情報とを記憶する車両記憶部を更に備え、前記車両識別情報から、受信された装置識別情報が自車両のための情報であると判断された場合に、前記車両記憶部から、受信された装置識別情報に基づき、位置情報を取得し、この取得された位置情報により自車両の位置を決定する、
付記5に記載の車両位置検出装置。
【0201】
(付記8)
前記認識部による前記指標の認識と、自車両の車速度とに基づき、当該指標間の距離を測定する距離測定部と、
前記取得部により取得される指標の位置情報に基づく、当該指標間の距離を計算する距離計算部と、
前記距離測定部により測定された指標間の距離と、前記距離計算部により計算された指標間の距離とを比較し、その比較結果に基づき、前記認識部による認識の誤りを検出するエラー検出部と、
前記エラー検出部により認識の誤りが検出された場合に、前記距離測定部により測定された当該指標間の距離に基づき、前記記憶部から、正しい指標の種類に関する情報を取得するエラー訂正部とを更に備え、
前記取得部は、前記エラー訂正部により取得された指標の種類に基づき、前記記憶部から位置情報を取得する、
付記1、2、3いずれかに記載の車両位置検出装置。
【0202】
(付記9)
車両が通過する地点周辺を、所定の形状を持つ指標を少なくとも1つ含むように撮影する撮像部と、
撮影された映像を画像データとして取り込む入力部と、
前記画像データの中から、前記少なくとも1つの指標を認識し、認識された指標の種類を特定する認識部と、
前記指標の種類とその指標の種類に対応する位置情報とを記憶する記憶部と、
特定された全ての指標の種類に基づき、前記記憶部から位置情報を取得する取得部と、
取得された位置情報を記憶する位置記憶部と、
前記位置記憶部に記憶された位置情報と、前記取得部により取得された位置情報とを比較した結果、位置情報の数が一致しない場合に、前記取得部により取得された位置情報で足りない位置情報に対応する指標が認識されていないことを検知し、この認識されていない指標に関する位置情報を車両の位置と決定する決定部と、
を備える車両位置検出装置。
【0203】
(付記10)
前記撮像部及び前記入力部を複数備える付記1、2、3、4、6、8、9いずれかに記載の車両位置検出装置。
【0204】
(付記11)
前記認識部を複数備える付記10に記載の車両位置検出装置。
【0205】
(付記12)
前記複数の入力部は、それぞれ異なるタイミングで画像を取り込む付記10又は11記載の車両位置検出装置。
【0206】
(付記13)
前記指標は、形状、模様、色、輝度のいずれか、或いはその組み合わせにより種類分けされ、
前記認識部は、前記指標の持つ形状、模様、色、輝度のいずれか、或いはその組み合わせを認識することにより、指標の種類を特定する、
付記1から12いずれかに記載の車両位置検出装置。
【0207】
(付記14)
前記指標は、連続、或いは断片的な形状を有し、
前記認識部は、前記指標の持つ形状の疎密、或いは振幅、若しくはその組み合わせを認識することにより、指標の種類を特定する、
付記1から12いずれかに記載の車両位置検出装置。
【0208】
(付記15)
前記決定された自車両の位置に基づき、交差点までの距離を算出する距離計算部と、
他の車両から送信される、他の車両に関する前記交差点までの距離と車速度情報を受信する通信部と、
前記算出された交差点までの距離と、自車両の車速度と、前記他の車両に関する前記交差点までの距離と車速度情報とから、当該交差点における自車両と前記他の車両との接近状態を求め、当該接近状態から衝突可能性を判定する衝突判定部と、
前記衝突可能性から衝突回避制御を行う制御部と、
を更に備える、付記1、2、3、5、7、8、10、11、12いずれかに記載の車両位置検出装置を有する衝突回避装置。
【0209】
(付記16)
前記指標は、形状、模様、色、輝度のいずれか、或いはその組み合わせにより種類分けされ、
前記認識部は、前記指標の持つ形状、模様、色、輝度のいずれか、或いはその組み合わせを認識することにより、指標の種類を特定する、
付記15に記載の衝突回避装置。
【0210】
(付記17)
前記指標は、連続、或いは断片的な形状を有し、
前記認識部は、前記指標の持つ形状の疎密、或いは振幅、若しくはその組み合わせを認識することにより、指標の種類を特定する、
付記15に記載の衝突回避装置。
【0211】
(付記18)
車両周辺の映像を撮影する撮像部と、
撮影された映像を画像データとして取り込む入力部と、
前記画像データの中から複数の所定の形状を持つ指標を認識し、認識された指標の種類をそれぞれ特定する認識部と、
前記指標の種類とその指標の種類に対応する位置情報とを記憶する記憶部と、
特定された指標の種類に基づき、前記記憶部から各指標に対応する位置情報をそれぞれ取得する取得部と、
複数の特定された指標に対応する位置情報に基づき、前記記憶部に記憶された位置情報から、認識されるべき指標で認識されていない指標を検知し、その認識されていない指標の位置情報を前記記憶部から取得する障害物検知部と、
を備える障害物検知装置。
【0212】
(付記19)
前記指標は、形状、模様、色、輝度のいずれか、或いはその組み合わせにより種類分けされ、
前記認識部は、前記指標の持つ形状、模様、色、輝度のいずれか、或いはその組み合わせを認識することにより、指標の種類を特定する、
付記18に記載の障害物検知装置。
【0213】
(付記20)
前記指標は、連続、或いは断片的な形状を有し、
前記認識部は、前記指標の持つ形状の疎密、或いは振幅、若しくはその組み合わせを認識することにより、指標の種類を特定する、
付記18に記載の障害物検知装置。
【0214】
(付記21)
車両周辺の映像を撮影するステップと、
撮影された映像を画像データとして取り込むステップと、
前記画像データの中から所定の形状を持つ指標を認識し、認識された指標の種類を特定するステップと、
特定された指標の種類に基づき、前記指標の種類とその指標の種類に対応する位置情報とが記憶された記憶部から、位置情報を取得するステップと、
取得された位置情報により車両の位置を決定するステップと、
を備える車両位置検出方法。
【0215】
(付記22)
所定の形状を持つ指標を持つ車両に搭載された装置と、車両外に設置された装置とで実行される車両位置検出方法であって、
前記車両外に設置された装置により、
前記車両が通過する地点周辺を撮影するステップと、
撮影された映像を画像データとして取り込むステップと、
前記画像データの中から、前記指標を認識し、認識された指標の種類を特定するステップと、
特定された指標の種類に基づき、前記指標の種類とその指標の種類に対応する車両の識別情報とを記憶する記憶部から、車両の識別情報を取得するステップと、
前記取得された車両の識別情報と自装置に関する位置情報とを送信するステップとが実行され、
前記車両に搭載された装置により、
前記車両外に設置された装置から送信された、車両を識別する車両識別情報と、前記車両外の装置に関する位置情報とを受信するステップと、
前記車両識別情報から、受信された位置情報が自車両のための情報であると判断された場合に、当該受信された位置情報から自車両の位置を決定する決定部とが実行される車両位置検出方法。
【0216】
(付記23)
付記21に記載の車両位置検出方法を有した衝突回避方法であって、
前記決定された自車両の位置に基づき、交差点までの距離を算出するステップと、
他の車両から送信される、他の車両に関する前記交差点までの距離と車速度情報を受信するステップと、
前記算出された交差点までの距離と、自車両の車速度と、前記他の車両に関する前記交差点までの距離と車速度情報とから、当該交差点における自車両と前記他の車両との接近状態を求め、当該接近状態から衝突可能性を判定するステップと、
前記衝突可能性から衝突回避制御を行うステップと、
を更に備える衝突回避方法。
【0217】
(付記24)
車両周辺の映像を撮影するステップと、
撮影された映像を画像データとして取り込むステップと、
前記画像データの中から複数の所定の形状を持つ指標を認識し、認識された指標の種類をそれぞれ特定するステップと、
特定された指標の種類に基づき、前記指標の種類とその指標の種類に対応する位置情報
とを記憶する記憶部から、各指標に対応する位置情報をそれぞれ取得するステップと、
複数の特定された指標に対応する位置情報に基づき、前記記憶部に記憶された位置情報から、認識されるべき指標で認識されていない指標を検知し、その認識されていない指標の位置情報を前記記憶部から取得するステップと、
を備える障害物検知方法。
【図面の簡単な説明】
【0218】
【図1】第一実施形態における車両位置検出装置の概要を示す図である。
【図2】画像マーカの例を示す図である。
【図3】画像マーカと2値化を示す図である。
【図4】第一実施形態における車両位置検出装置の機能構成を示すブロック図である。
【図5】画像マーカデータベースを示す図である。
【図6】第二実施形態における車両位置検出装置の概要を示す図である。
【図7】第二実施形態における車両位置検出装置の機能構成を示すブロック図である。
【図8】第二実施形態における入力画像を示す図である。
【図9】第二実施形態の変形例における入力画像を示す図である。
【図10】第二実施形態の変形例における画像マーカ・車両間距離の計算概念を示す図である。
【図11】第三実施形態における車両位置検出装置の機能構成を示すブロック図である。
【図12】第三実施形態における画像マーカ配列の概念図である。
【図13】第三実施形態における画像マーカデータベースの概念図である。
【図14】第三実施形態における画像マーカ配列の第一の例を示す図である。
【図15】第三実施形態における画像マーカデータベースの第一の例を示す図である。
【図16】第三実施形態における画像マーカ配列の第二の例を示す図である。
【図17】第三実施形態における画像マーカデータベースの第二の例を示す図である。
【図18】第三実施形態における車両位置検出装置の変形例を示す図である。
【図19】第四実施形態における車両位置検出装置の概要を示す図である。
【図20】第四実施形態における車両位置検出装置の機能構成を示すブロック図である。
【図21】第四実施形態における車両位置検出装置の変形例を示す図である。
【図22】第五実施形態における衝突回避装置の概要を示す図である。
【図23】第五実施形態における衝突回避装置の機能構成を示すブロック図である。
【図24】第五実施形態における衝突回避装置の変形例を示す図である。
【図25】第六実施形態における障害物検知の概要を示す図である。
【図26】第六実施形態における障害物検知装置の機能構成を示すブロック図である。
【図27】第七実施形態における車両位置検出装置の機能構成を示すブロック図である。
【図28】第七実施形態における車両位置検出装置の変形例を示す図である。
【図29】第八実施形態における車両位置検出装置の機能構成を示すブロック図である。
【図30】画像入力部による画像取り込みタイミングを示す図である。
【図31】第八実施形態における車両位置検出装置の変形例を示す図である。
【図32】第九実施形態における車両位置検出装置の概要を示す図である。
【図33】第九実施形態における車両位置検出装置の機能構成を示すブロック図である。
【図34】画像マーカの変形例を示す図である。
【図35】連続した画像マーカの例を示す図である。
【符号の説明】
【0219】
10 ビデオカメラ
15 画像マーカ
20、201、291、292、331 画像入力部
21、202、311、312、332 画像認識部
22 車両位置測定部
23、204、334 画像マーカデータベース
71 画像マーカ・車両間距離計算部
81、82、83、84 画像マーカ
111 画像マーカ配列記憶部
203 識別情報取得部
205 情報送信部
206 情報受信部
207 車両位置測定部
208 位置情報データベース
221、222 車両
231 車両位置検出装置
232 距離計算部
233 通信部
234 衝突判定部
235 衝突警報・回避部
236、274 車速センサ
241 衝突監視装置
251、252、253、254、255 画像マーカ
256 障害物
261 障害物検知部
271 画像マーカエラー検出訂正部
272 画像マーカ間距離測定部
273 画像マーカ間距離計算部
321、322 撮影範囲
333 画像マーカ位置測定部
335 車両位置検知部
336 画像マーカ位置記憶部
【特許請求の範囲】
【請求項1】
車両周辺の映像を撮影する撮像部と、
撮影された映像を画像データとして取り込む入力部と、
前記画像データの中から所定の形状を持つ指標を認識し、認識された指標の種類を特定する認識部と、
前記指標の種類とその指標の種類に対応する位置情報とを記憶する記憶部と、
特定された指標の種類に基づき、前記記憶部から位置情報を取得する取得部と、
取得された位置情報により車両の位置を決定する決定部と、
を備える車両位置検出装置。
【請求項2】
前記認識部は、前記画像データの中から、前記指標の種類を特定すると共に、認識された指標の画像データ上の位置及び大きさを認識し、
前記記憶部は、前記指標の種類に対応する位置情報の他、その指標の大きさと、隣接する他の指標との間隔を記憶し、
前記取得部は、前記位置情報の他、該指標の大きさと、隣接する他の指標との間隔を取得し、
前記決定部は、取得された指標の大きさと隣接する他の指標との間隔に基づき、車両から、該指標までの距離を算出する算出部を更に備え、算出された該指標までの距離と、前記位置情報とから、車両の位置を決定する、
請求項1に記載の車両位置検出装置。
【請求項3】
前記認識部により特定された指標の種類を連続した並びで格納する格納部を更に備え、
前記記憶部は、幾つか連続した前記指標の種類の並びと、その並びに対応する前記位置情報とを記憶し、
前記取得部は、前記格納部に格納された指標の種類の並びに基づき、前記記憶部から、その並びに対応する前記位置情報を取得する、
請求項1又は2に記載の車両位置検出装置。
【請求項4】
車両が通過する地点周辺を、所定の形状を持つ指標を少なくとも1つ含むように撮影する撮像部と、
撮影された映像を画像データとして取り込む入力部と、
前記画像データの中から、前記少なくとも1つの指標を認識し、認識された指標の種類を特定する認識部と、
前記指標の種類とその指標の種類に対応する位置情報とを記憶する記憶部と、
特定された全ての指標の種類に基づき、前記記憶部から位置情報を取得する取得部と、
取得された位置情報を記憶する位置記憶部と、
前記位置記憶部に記憶された位置情報と、前記取得部により取得された位置情報とを比較した結果、位置情報の数が一致しない場合に、前記取得部により取得された位置情報で足りない位置情報に対応する指標が認識されていないことを検知し、この認識されていない指標に関する位置情報を車両の位置と決定する決定部と、
を備える車両位置検出装置。
【請求項5】
所定の形状を持つ指標を有する車両に搭載された装置と車両外に設置された装置とからなる車両位置検出システムにおいて、
前記車両外に設置された装置が、
車両が通過する地点周辺を撮影する撮像部と、
撮影された映像を画像データとして取り込む入力部と、
前記画像データの中から、前記車両に搭載され所定の形状を持つ指標を認識し、認識された指標の種類を特定する認識部と、
前記指標の種類と、その指標の種類に対応する車両の識別情報とを記憶する記憶部と、
特定された指標の種類に基づき、前記記憶部から車両の識別情報を取得する取得部と、
前記取得された車両の識別情報と自装置に関する位置情報とを送信する送信部と、
を備え、
前記車両に搭載された装置が、
前記車両外に設置された装置から送信された、車両を識別する車両識別情報と、前記車両外の設置された装置に関する位置情報とを受信する受信部と、
前記車両識別情報から、受信された位置情報が自車両のための情報であると判断された場合に、当該受信された位置情報から自車両の位置を決定する決定部と、
を備える車両位置検出システム。
【請求項1】
車両周辺の映像を撮影する撮像部と、
撮影された映像を画像データとして取り込む入力部と、
前記画像データの中から所定の形状を持つ指標を認識し、認識された指標の種類を特定する認識部と、
前記指標の種類とその指標の種類に対応する位置情報とを記憶する記憶部と、
特定された指標の種類に基づき、前記記憶部から位置情報を取得する取得部と、
取得された位置情報により車両の位置を決定する決定部と、
を備える車両位置検出装置。
【請求項2】
前記認識部は、前記画像データの中から、前記指標の種類を特定すると共に、認識された指標の画像データ上の位置及び大きさを認識し、
前記記憶部は、前記指標の種類に対応する位置情報の他、その指標の大きさと、隣接する他の指標との間隔を記憶し、
前記取得部は、前記位置情報の他、該指標の大きさと、隣接する他の指標との間隔を取得し、
前記決定部は、取得された指標の大きさと隣接する他の指標との間隔に基づき、車両から、該指標までの距離を算出する算出部を更に備え、算出された該指標までの距離と、前記位置情報とから、車両の位置を決定する、
請求項1に記載の車両位置検出装置。
【請求項3】
前記認識部により特定された指標の種類を連続した並びで格納する格納部を更に備え、
前記記憶部は、幾つか連続した前記指標の種類の並びと、その並びに対応する前記位置情報とを記憶し、
前記取得部は、前記格納部に格納された指標の種類の並びに基づき、前記記憶部から、その並びに対応する前記位置情報を取得する、
請求項1又は2に記載の車両位置検出装置。
【請求項4】
車両が通過する地点周辺を、所定の形状を持つ指標を少なくとも1つ含むように撮影する撮像部と、
撮影された映像を画像データとして取り込む入力部と、
前記画像データの中から、前記少なくとも1つの指標を認識し、認識された指標の種類を特定する認識部と、
前記指標の種類とその指標の種類に対応する位置情報とを記憶する記憶部と、
特定された全ての指標の種類に基づき、前記記憶部から位置情報を取得する取得部と、
取得された位置情報を記憶する位置記憶部と、
前記位置記憶部に記憶された位置情報と、前記取得部により取得された位置情報とを比較した結果、位置情報の数が一致しない場合に、前記取得部により取得された位置情報で足りない位置情報に対応する指標が認識されていないことを検知し、この認識されていない指標に関する位置情報を車両の位置と決定する決定部と、
を備える車両位置検出装置。
【請求項5】
所定の形状を持つ指標を有する車両に搭載された装置と車両外に設置された装置とからなる車両位置検出システムにおいて、
前記車両外に設置された装置が、
車両が通過する地点周辺を撮影する撮像部と、
撮影された映像を画像データとして取り込む入力部と、
前記画像データの中から、前記車両に搭載され所定の形状を持つ指標を認識し、認識された指標の種類を特定する認識部と、
前記指標の種類と、その指標の種類に対応する車両の識別情報とを記憶する記憶部と、
特定された指標の種類に基づき、前記記憶部から車両の識別情報を取得する取得部と、
前記取得された車両の識別情報と自装置に関する位置情報とを送信する送信部と、
を備え、
前記車両に搭載された装置が、
前記車両外に設置された装置から送信された、車両を識別する車両識別情報と、前記車両外の設置された装置に関する位置情報とを受信する受信部と、
前記車両識別情報から、受信された位置情報が自車両のための情報であると判断された場合に、当該受信された位置情報から自車両の位置を決定する決定部と、
を備える車両位置検出システム。
【図1】


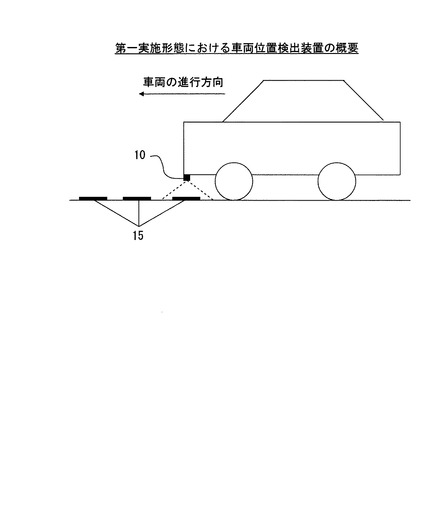
【図2】
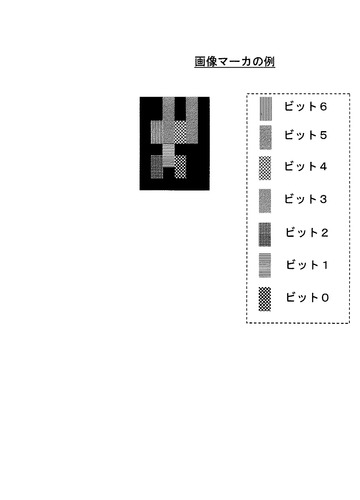
【図3】
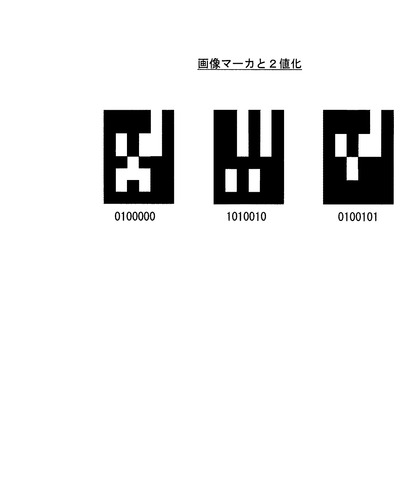
【図4】
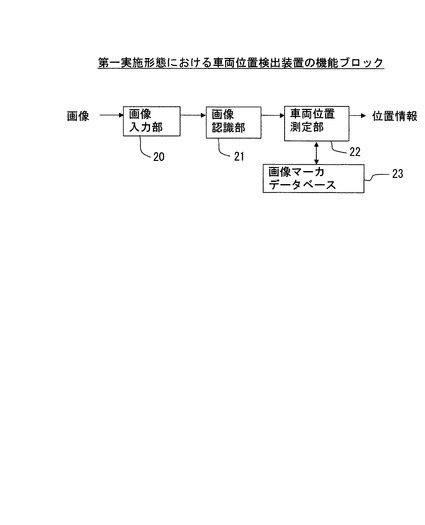
【図5】

【図6】

【図7】

【図8】
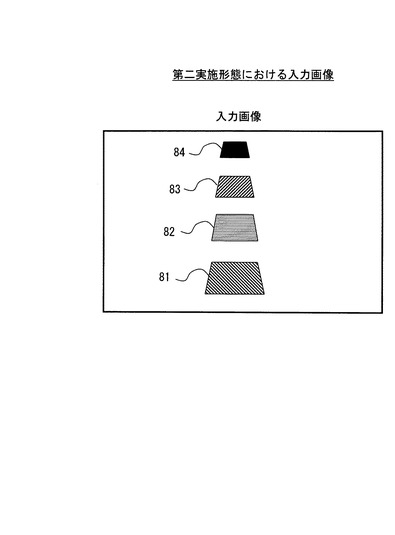
【図9】
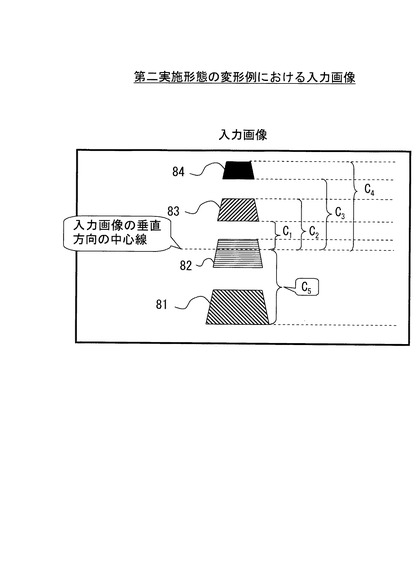
【図10】
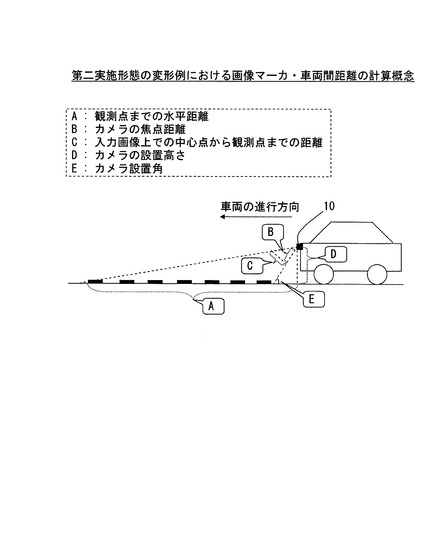
【図11】
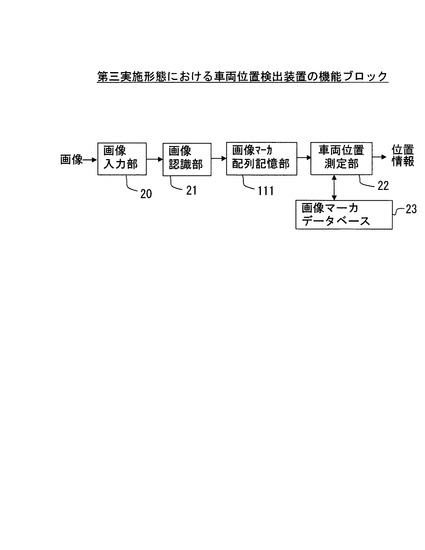
【図12】
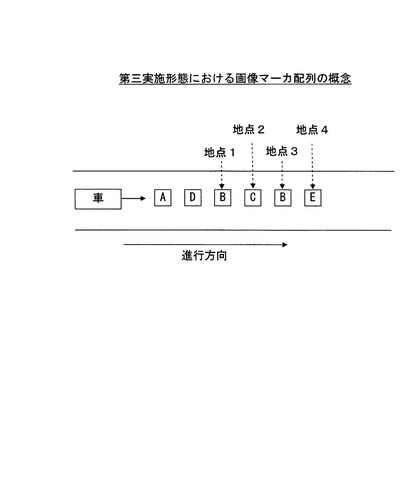
【図13】

【図14】

【図15】

【図16】
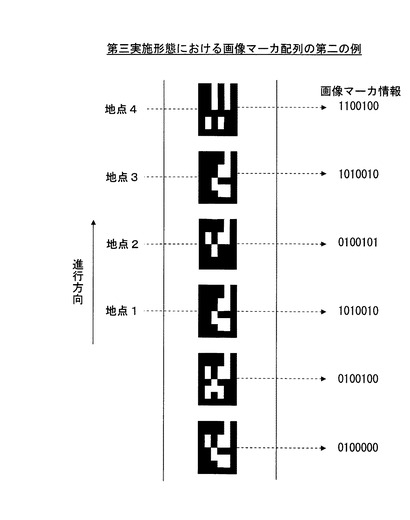
【図17】
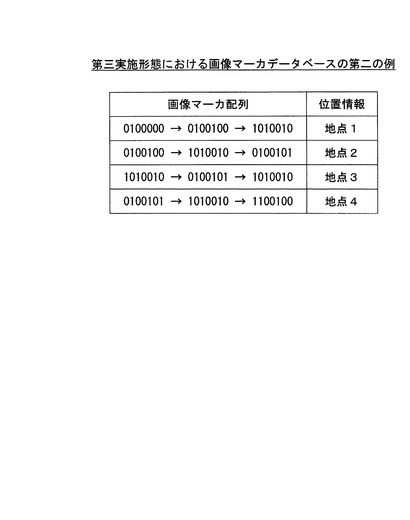
【図18】
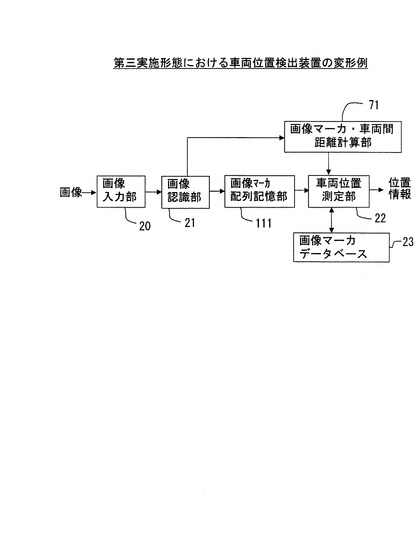
【図19】
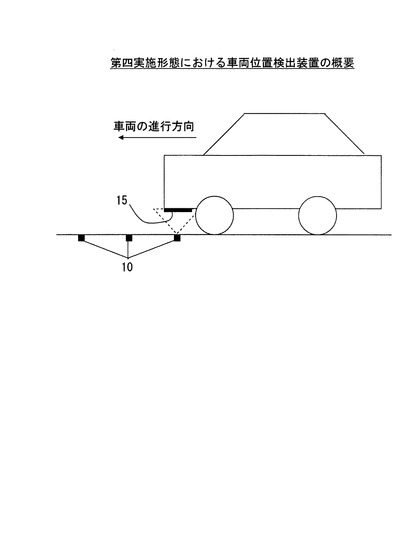
【図20】
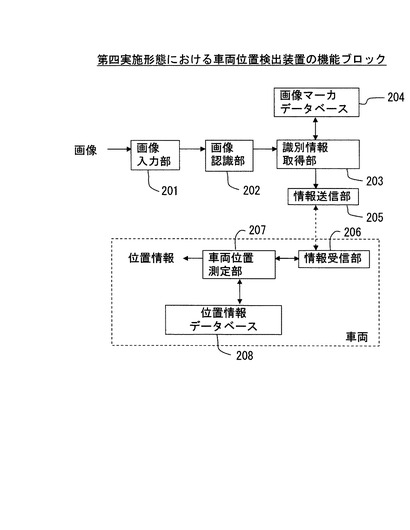
【図21】
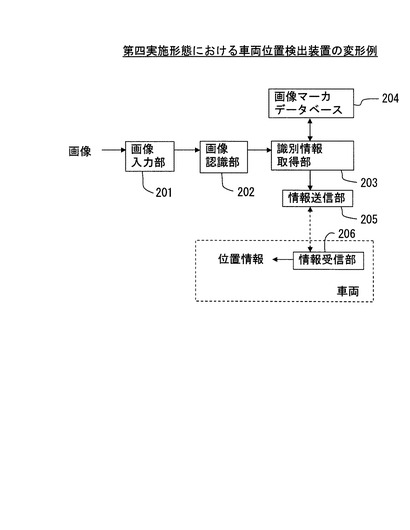
【図22】

【図23】

【図24】
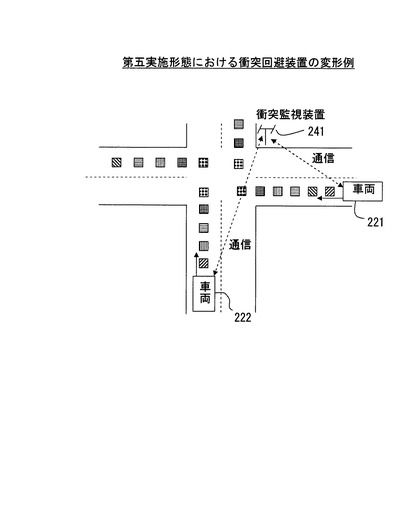
【図25】
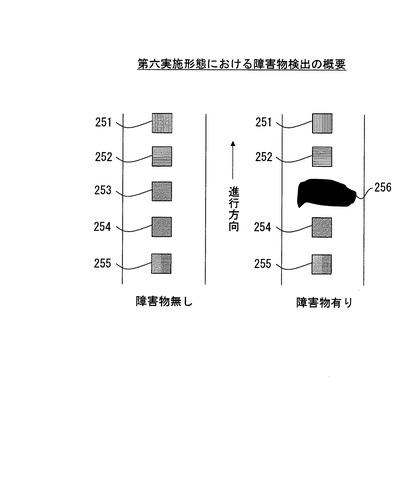
【図26】

【図27】
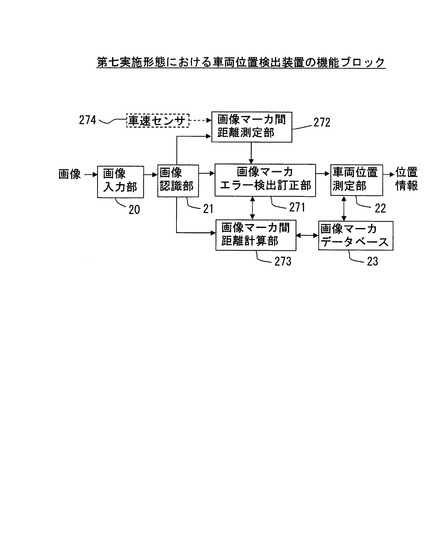
【図28】
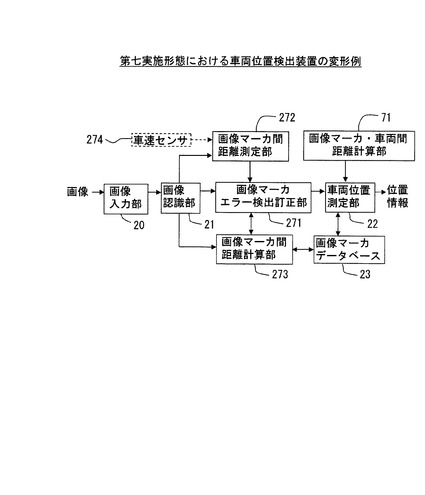
【図29】
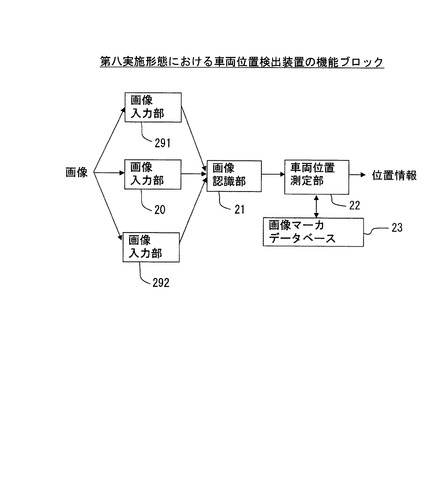
【図30】
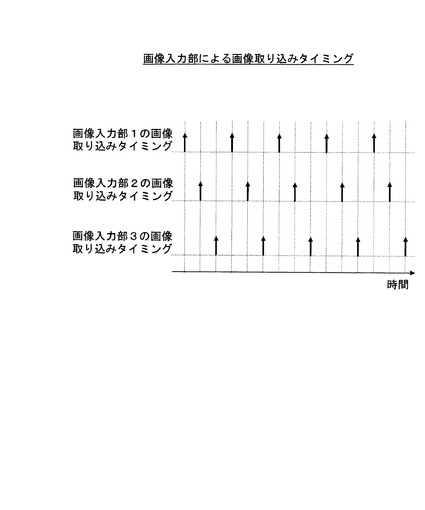
【図31】

【図32】
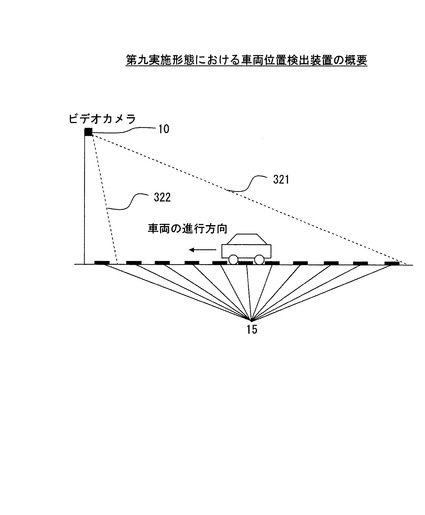
【図33】

【図34】
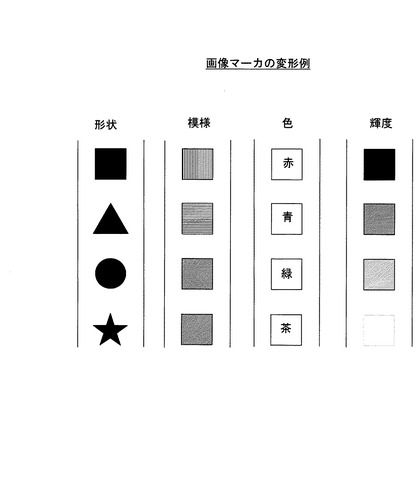
【図35】
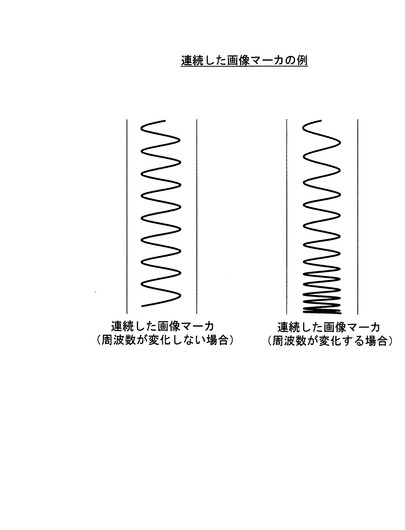
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【図33】
【図34】
【図35】
【公開番号】特開2007−10335(P2007−10335A)
【公開日】平成19年1月18日(2007.1.18)
【国際特許分類】
【出願番号】特願2005−188077(P2005−188077)
【出願日】平成17年6月28日(2005.6.28)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
【公開日】平成19年1月18日(2007.1.18)
【国際特許分類】
【出願日】平成17年6月28日(2005.6.28)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
[ Back to top ]