
車両位置検出装置
【課題】演算処理時間に起因した誤差要因を適切に排除して、現時点の車両の位置を高精度に検出すること。
【解決手段】本発明は、車両に搭載され、該車両の位置を検出する車両位置検出装置において、車両外に存在する特定の対象物の位置情報を記憶した記憶手段30と、前記特定の対象物を検出する対象物検出手段32と、前記対象物検出手段の検出データに基づいて、前記対象物検出手段により検出された対象物に対する車両の相対位置を導出する相対位置導出手段と、前記記憶された対象物の位置情報を基準として、前記導出された対象物に対する車両の相対位置と、前記対象物検出手段の検出データの取得時点から前記相対位置を導出する時点までの補正時間とに基づいて、現時点の車両の位置を算出する車両位置算出手段と、を備えることを特徴とする。
【解決手段】本発明は、車両に搭載され、該車両の位置を検出する車両位置検出装置において、車両外に存在する特定の対象物の位置情報を記憶した記憶手段30と、前記特定の対象物を検出する対象物検出手段32と、前記対象物検出手段の検出データに基づいて、前記対象物検出手段により検出された対象物に対する車両の相対位置を導出する相対位置導出手段と、前記記憶された対象物の位置情報を基準として、前記導出された対象物に対する車両の相対位置と、前記対象物検出手段の検出データの取得時点から前記相対位置を導出する時点までの補正時間とに基づいて、現時点の車両の位置を算出する車両位置算出手段と、を備えることを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両に搭載され、該車両の位置を検出する車両位置検出装置に関する。
【背景技術】
【0002】
従来から、車両の進行方向における所定範囲を撮像する撮像手段と、前記撮像手段によって撮像された画像信号において、前記車両が停止すべきことを示す対象物を抽出する抽出手段と、前記抽出手段によって、前記車両が停止すべきことを示す複数の対象物が抽出された場合に、当該車両を停止させるための運転支援を行なう運転支援手段とを備えることを特徴とする車両運転支援装置知られている(例えば、特許文献1参照)。
【特許文献1】特開2005−170154号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
ところで、車両の位置を検出する方法としては、GPS(Global Positioning System)を用いた測位が一般的である。かかるGPS測位では、干渉測位などを用いた高精度測位方法が各種提案されている。また、GPS測位結果に基づく車両位置を、所与の地図データに基づく道路リンク上に補正するマップマッチング等も一般的である。また、例えば上記の特許文献1に記載の発明のように、対象物との相対距離が重要なアプリケーションでは、レーダーセンサや画像センサを用いるのが一般的である。
【0004】
しかしながら、車両位置に対する要求精度の増加に伴い、車両位置の演算に要する時間が長くなる傾向にある。一方、車両は、他の移動体(例えば人)に比べて高速に移動し、それ故に車両の位置は、時々刻々と比較的大きく変化する。従って、現時点の車両の位置を更に高精度に検出するには、このような演算処理時間に起因した誤差要因を適切に排除する必要がある。
【0005】
そこで、本発明は、演算処理時間に起因した誤差要因を適切に排除して、現時点の車両の位置を高精度に検出することができる車両位置検出装置の提供を目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するため、第1の発明は、車両に搭載され、該車両の位置を検出する車両位置検出装置において、
車両外に存在する特定の対象物の位置情報を記憶した記憶手段と、
前記特定の対象物を検出する対象物検出手段と、
前記対象物検出手段の検出データに基づいて、前記対象物検出手段により検出された対象物に対する車両の相対位置を導出する相対位置導出手段と、
前記記憶された対象物の位置情報を基準として、前記導出された対象物に対する車両の相対位置と、前記対象物検出手段の検出データの取得時点から前記相対位置を導出する時点までの補正時間とに基づいて、現時点の車両の位置を算出する車両位置算出手段と、を備えることを特徴とする。
【0007】
第2の発明は、第1の発明に係る車両位置検出装置において、
前記補正時間は、計測されるか、又は、予め導出された値が用いられることを特徴とする。
【0008】
第3の発明は、第1の発明に係る車両位置検出装置において、
前記車両位置算出手段は、
車速情報に基づいて、前記補正時間の間に車両が移動した移動量を算出し、
前記記憶された対象物の位置情報を基準として、前記演算された車両の相対位置と、前記算出した移動量とに基づいて、現時点の車両の位置を導出することを特徴とする。
【0009】
第4の発明は、第1から3のいずれかの発明に係る車両位置検出装置において、
前記対象物検出手段は、車両外を撮像するカメラを用いて前記特定の対象物を検出し、前記対象物検出手段の検出データの取得時点は、前記特定の対象物が撮像された画像の取得時点であることを特徴とする。これにより、比較的長い画像処理時間を必要とするカメラを用いる場合であっても、画像処理時間に起因した誤差要因を適切に排除することができる。
【0010】
第5の発明は、車両に搭載され、該車両の位置を検出する車両位置検出装置において、
車両外に存在する特定の対象物の位置情報を記憶した記憶手段と、
前記特定の対象物を検出する対象物検出手段と、
前記対象物検出手段の検出データに基づいて、前記対象物検出手段により検出された対象物に対する車両の相対位置を導出する相対位置導出手段と、
前記記憶された対象物の位置情報を基準として、前記導出された車両の相対位置と、前記対象物検出手段の検出データの取得時点から現時点までの時間とに基づいて、現時点の車両の位置を導出する車両位置算出手段と、を備えることを特徴とする。
【発明の効果】
【0011】
本発明によれば、演算処理時間に起因した誤差要因が適切に排除され、現時点の車両の位置を高精度に検出することができる。
【発明を実施するための最良の形態】
【0012】
以下、図面を参照して、本発明を実施するための最良の形態の説明を行う。
【0013】
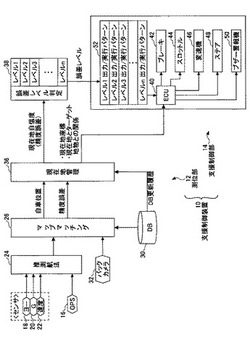
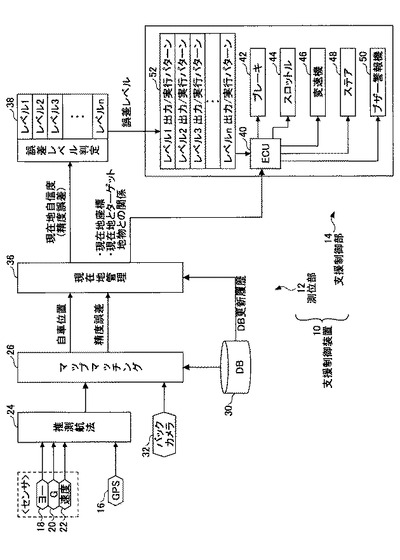
図1は、本発明による車両位置検出装置の一実施例が組み込まれる支援制御システム10の構成図を示す。本実施例の支援制御システム10は、図1に示す如く、自車両の位置を測位するための測位部12と、自車両の走行等を制御するための支援制御部14と、を備えており、測位部12で測位される精度誤差の変動し得る自車両の位置に応じて、支援制御部14による自車両を走行させるうえでの所定の支援制御を実行するシステムである。尚、この支援制御は、例えば、イグニションオン後、車両運転者がその制御実行を許可するスイッチオン後に開始されるものとすればよい。尚、自車両の位置は、厳密には車体のどの箇所を基準にするかによって異なってくる。従って、以下では、説明の都合上、自車両の位置は、車両の後軸中心を基準にして管理されているものとする。
測位部12は、GPS(Global Positioning System)受信機16と、ヨーセンサ18と、Gセンサ20と、車速センサ22と、を有している。GPS受信機16は、GPS衛星から送信されるGPS信号を受信することにより、地球上における自車両の現在位置の緯度及び経度並びに現在時刻を検知する。ヨーセンサ18は、地磁気センサやジャイロセンサであって、自車両のヨー角(方位)を検知する。Gセンサ20は、自車両の前後の加減速度を検知する。また、車速センサ22は、自車両の車速を検知する。
【0014】
GPS受信機16、ヨーセンサ18、Gセンサ20、及び車速センサ22の出力は、主にマイクロコンピュータにより構成された推測航法部24に接続されている。各受信機やセンサ16〜22の出力信号はそれぞれ、推測航法部24に供給される。推測航法部24は、GPS受信機16からの情報に基づいて自車両の現在位置の緯度及び経度(初期座標)を検出すると共に、センサ18〜22からの情報に基づいて自車両の進行方位などの走行状態を検出して、自車両位置の初期座標からの車両の走行軌跡(推測軌跡)を作成する。
【0015】
測位部12は、また、推測航法部24に接続する主にマイクロコンピュータにより構成されたマップマッチング部26、及び、マップマッチング部26に接続する地図データベース30を有している。地図データベース30は、車両に搭載されたハードディスク(HDD)やDVD,CDなどにより構成されており、道路自体のリンク情報や道路に描かれ或いは設置される地物や車線レーンの情報などの各種地図データを格納している。
【0016】
尚、この地図データベース30に格納される地図データは、道路を表す緯度・経度や曲率,勾配,車線数,車線幅,コーナ有無などのレーン形状や道路種別のデータや、その道路の表面に描かれる横断歩道や一時停止線,進行方向矢印,「横断歩道あり」の菱形標示,最高速度標示,転回禁止標示などの各地物ごとの形状データやペイントデータ,位置データ,各地物間の距離データなどである。また、この地図データベース30は、ディスクの交換や更新条件の成立により格納する地図データを最新のものに更新可能である。
【0017】
マップマッチング部26には、推測航法部24においてマップマッチングのために作成された自車両位置の初期座標からの推測軌跡の情報が供給される。マップマッチング部26は、推測航法部24から推測軌跡の情報が供給されるごとに、自車両の現在位置を地図データベース30に格納されている道路自体のリンク情報を利用してその道路リンク上に補正するマップマッチングを行う。
【0018】
マップマッチング部26は、マップマッチングの結果得られた自車両の現在位置から自車両が今後所定時間内又は所定距離内に走行すると推測される道路範囲の地図データを地図データベース30から読み出す。そして、その現在位置からの所定道路範囲において認識すべき地物が描かれ或いは設置されているか否かを判別することにより、後述のバックカメラによる撮像画像を認識すべきか否かを判別する。
【0019】
測位部12は、また、マップマッチング部26に接続するバックカメラ32を有している。バックカメラ32は、車両後部バンパなどに配設されており、その配設位置から車両後方の道路表面を含む所定領域の外界を撮影することができる。バックカメラ32の撮像画像は、マップマッチング部26に供給される。
【0020】
マップマッチング部26は、バックカメラ32による撮像画像を認識すべきと判別する場合において、バックカメラ32から撮像画像が供給されたとき、その撮像画像についてエッジ抽出などの画像処理を行うことにより、道路表面に描かれる上記の地物や走行レーンなどを検出すると共に、それら地物等と自車両との相対位置関係を把握する。尚、この地物や走行レーンの検出に際しては、その効率化を図る観点から、マップマッチング部26や地図データベース30から提供される地物等の特徴データに基づいて、事前にその地物等が存在する道路のエリアを把握して、バックカメラ32による全撮像画像に対してその存在領域を重点的に絞って画像処理を行うこととしてもよい。
【0021】
マップマッチング部26は、バックカメラ32の撮像画像からの走行レーンの検出結果に基づいて、自車両が現に走行する道路上における自車両に対する自レーンの位置を算出する。また、地物の検出結果に基づいて、自車両と自車両の道路後方に存在する認識した地物との相対関係(具体的には、自車両から認識地物までの距離)を測定し、そして、その測定結果と、地図データベース30に格納されているその認識地物の位置データとに基づいて、自車両の位置を算出(補正)する。この自車両の位置の算出処理(補正処理)の詳細は後述する。
【0022】
マップマッチング部26は、上記の如く、推測航法部24から推測軌跡の情報が供給されるごとに、自車両の現在位置を地図データベース30に格納されている道路リンク上に補正するマップマッチングを行うと共に、更に、バックカメラ32の撮像画像から認識すべき地物が認識された際にも、その認識結果による位置へ自車両の位置を補正するマップマッチングを行う。マップマッチング部26は、後に詳述する如く、マップマッチングの結果として測位される自車両の現在位置の精度を示す正確性(すなわち自信度)を算出する。
【0023】
マップマッチング部26は、また、マップマッチングにより自車両の位置を測位すると、自車両の進行方向前方に、上記した支援制御を実行するのに必要な制御対象である目標の地物(例えば、停止線や交差点,カーブ進入口等)が存在するときは、測位した自車両の位置と地図データベース30に格納されているその目標地物の位置との関係に基づいて、自車両からその目標地物までの距離(以下、道なり残距離と称す)を算出する。
【0024】
測位部12は、また、マップマッチング部26に接続する現在地管理部36を有している。現在地管理部36には、マップマッチング部26で算出されたマップマッチングの結果得られた自車両の現在位置のリンクIDやリンク座標,その位置精度を示す自信度の情報、自車両が現に走行する道路における走行レーンの情報、及び、自車両から目標地物までの道なり残距離の情報がその得られた時刻の情報と共に供給される。また、現在地管理部36には、地図データベース30における地図データの更新後の経過時間や更新条件などの更新履歴情報が供給される。
【0025】
現在地管理部36は、マップマッチング部26から供給される情報に基づいて、測位された自車両の現在位置や目標地物までの道なり残距離を検出すると共に、測位された自車両の現在位置の自信度を示す精度の誤差を検知する。現在地管理部36で検出された自車両の現在位置や道なり残距離の情報は、例えば自車両の有するナビゲーション装置に供給されて、その表示ディスプレイに表示されている地図上に模式的に表示される。
【0026】
支援制御システム10は、現在地管理部36に接続される誤差レベル判定部38を備えている。誤差レベル判定部38には、現在地管理部36で検知され管理されている自車両の現在位置を測位するうえでの位置精度の誤差を示す情報が供給される。誤差レベル判定部38は、自車両の現在位置を測位するうえでの位置精度誤差と、支援制御部14による支援制御の後述の各制御レベルをそれぞれ適切に実行するうえで必要な測位の精度誤差レベルとの関係を予めマップとして有している。誤差レベル判定部38は、現在地管理部36から供給される測位部12で自車両の現在位置を測位するうえでの位置精度誤差の情報に基づいて、その都度、その精度誤差レベルを特定する。尚、精度誤差レベルは、予め位置精度誤差の大きさに応じた複数の段階的なレベルを有するものであればよい(レベル1〜レベルn)。
【0027】
誤差レベル判定部38による判定結果、及び、現在地管理部36による測位した自車両の現在位置座標や自車両から目標地物までの相対関係の情報は、上記した支援制御部14に供給される。支援制御部14は、マイクロコンピュータを主体に構成された電子制御ユニット(ECU)40を備えており、ECU40により自車両を道路上で走行させる際の運転者への支援制御を実行する。
【0028】
この支援制御は、自車両の位置に応じて実行される例えば、特に運転者によるブレーキ操作が行われないときや遅れているときなどに自車両を道路上の地物である一時停止線や踏み切りなどで停車させるための運転支援制御である一時停止制御、自車両を道路上の地物である交差点で交差すると予測される他車両と交錯させないための運転支援制御である交差点制御、自車両を地物であるカーブ(コーナー)に対して適切な速度で進入走行させるための速度制御、目標地物までの相対距離に対する音声による経路案内を行うための案内制御などである。
【0029】
ECU40には、自車両に適当な制動力を発生させるためのブレーキアクチュエータ42、自車両に適当な駆動力を付与するためのスロットルアクチュエータ44、自車両の自動変速機の変速段を切り替えるためのシフトアクチュエータ46、自車両に適当な操舵角を付与するためのステアアクチュエータ48、及び車室内に向けてブザー吹鳴や警報出力,スピーカ出力を行うためのブザー警報器50が接続されている。ECU40は、後に詳述する如く、現在地管理部36で管理されている測位された自車両の現在位置や誤差レベル判定部38で特定された精度誤差レベル等に基づいて、各アクチュエータ42〜50に対して適当な駆動指令を行う。各アクチュエータ42〜50は、ECU40から供給される駆動指令に従って駆動される。
【0030】
支援制御部14は、また、ECU40による支援制御を実行するうえで用いられる出力/実行パターンの情報を格納するパターン記憶部52を有している。この出力/実行パターンは、支援制御ごとに定められている。パターン記憶部52には、上記した誤差レベル判定部38により特定される複数の段階的な精度誤差レベルに対応した複数の支援形態(制御レベル)である出力/実行パターン(レベル1〜レベルn)が支援制御ごとに格納されている。
【0031】
例えば、上記の如き自車両を一時停止線等で停車させるための一時停止制御においては、測位精度が高くその誤差が小さい順に、自車両を主にブレーキアクチュエータ42を用いて自動的に制動させて一時停止線等で停車させる回避制御パターン(レベル1)、一時停止線等の手前で自車両を自動的にアクセルオフして減速させ或いはシフトアクチュエータ46を用いてエンジンブレーキを作動させ、また、運転者によるブレーキ操作時には自車両に通常よりも大きな制動力を発生させる減速制御パターン(レベル2)、ブザー警報器50を用いて前方の一時停止線等で自車両を停車させるためにブレーキ操作を行うべきことを運転者に知らせる判断補助パターン(レベル3)、及びブザー警報器50を用いて運転者に対して前方に一時停止線等が存在することを注意喚起する存在情報提供パターン(レベル4)が格納される。
【0032】
また、上記の如き自車両を道路上の交差点で他車両と交錯させないための交差点制御においては、自車両を主にブレーキアクチュエータ42やステアアクチュエータ48を用いて自動的に制動させ或いは操舵させて交差点での他車両との交錯を回避させる回避制御パターン(レベル1)、交差点の手前で自車両を自動的にアクセルオフして減速させ或いはシフトアクチュエータ46を用いてエンジンブレーキを作動させ、また、運転者によるブレーキ操作時に自車両に通常よりも大きな制動力を発生させる減速制御パターン(レベル2)、ブザー警報器50を用いて前方の交差点で自車両を減速若しくは停車させるためにブレーキ操作を行うべきことを運転者に知らせる判断補助パターン(レベル3)、及びブザー警報器50を用いて運転者に対して前方の交差点で他車両と交錯する可能性があることを注意喚起する存在情報提供パターン(レベル4)が格納される。
【0033】
また、上記の如く目標地物(例えば右折交差点)までの相対距離に対する音声による経路案内を行うための案内制御においては、自車両が目標地物に到達する直前(例えば5メートル手前)でその目標地物の存在を運転者に知らせるパターン(レベル1)、自車両が目標地物に到達する第2所定距離(例えば10メートル手前)でその目標地物の存在を運転者に知らせるパターン(レベル2)、自車両が目標地物に到達する第3所定距離(例えば40メートル手前)でその目標地物の存在を運転者に知らせるパターン(レベル3)、自車両が目標地物に到達する第4距離(例えば80メートル手前)でその目標地物の存在を運転者に知らせるパターン(レベル4)が格納される。
【0034】
支援制御の各支援形態にはそれぞれ、予め、制御を開始すべきタイミング(車速に応じて可変するのがよい。)が定められており、大きい誤差に対応した支援形態の方が、小さい誤差に対応した支援形態に比べて、測位される自車両と制御対象の目標地物との間の距離がより長い時期に、すなわち、自車両が目標地物に接近する際により早いタイミングでその実行が開始されるように定められている。
【0035】
例えば、一時停止制御が実行される状況においては、ある車速での走行時は、存在情報提供パターン(レベル4)の支援形態による注意喚起は、測位された目標地物までの距離が100メートルになった時点で開始されるが、回避制御パターン(レベル1)の支援形態による制動ブレーキは、測位された目標地物までの距離が30メートルになった時点で開始される。また、目標地物(例えば右折交差点)までの相対距離に対する音声による経路案内を行うための案内制御が実行される状況においては、ある車速での走行時は、レベル4の支援形態による音声案内は、測位された目標地物までの距離が80メートルになった時点で開始されるが、レベル1の支援形態による音声案内は、測位された目標地物までの距離が5メートルになった時点で開始される。
【0036】
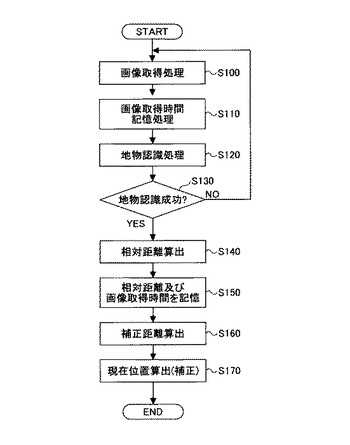
次に、本実施例の測位部12のマップマッチング部26により実現される自車両の位置の算出処理(補正処理)について、詳説していく。図2は、本実施例の測位部12のマップマッチング部26により実現される関連処理の流れを示すフローチャートである。マップマッチング部26には、バックカメラ32からの撮像画像が適切なフレームレートのストリーム形式で供給される。マップマッチング部26は、フレーム周期毎に、以下の処理を実行する。
【0037】
ステップ100では、マップマッチング部26は、バックカメラ32から撮像画像を取得する。
【0038】
ステップ110では、マップマッチング部26は、撮像画像を取得した時点t=tg(フレーム周期毎に変化)を所定のメモリに記憶する。
【0039】
ステップ120では、マップマッチング部26は、上述の如く画像処理を行い、ステップ130では、道路表面に描かれる地物が認識されたか否か(地物に係る特徴点が抽出されたか否か)を判定する。地物が認識されたと判定した場合には、ステップ140に進み、地物が認識されないと判定した場合には、ステップ100に戻る。ステップ100に戻る場合、次のフレームの撮像画像に対して、ステップ110及びステップ120の処理が実行されることになる。
【0040】
ステップ140では、マップマッチング部26は、認識された地物と自車両との相対距離L0[m]を算出する。
【0041】
ステップ150では、マップマッチング部26は、算出した地物と自車両との相対距離L0と、地物が認識された撮像画像の取得時点(t=tg)とを、対応付けて記憶する。尚、上記ステップ120等において、地物認識(及び相対距離L0の算出)に複数のフレームの画像が用いられた場合には、最終的に算出された相対距離L0にもっとも適合した画像の取得時間(t=tg)が出力される。
【0042】
ステップ160では、マップマッチング部26は、上記のステップ150の処理により相対距離L0及び画像取得時点tgを導出すると、マップマッチング部26は、画像取得時点t=tgから現時点t=t1までの時間Δtと、車速Vに基づいて、時間Δtの間に車両が移動した距離L(以下、「補正距離」という)を算出する。尚、車速Vは、車速センサ22の出力信号に基づいて演算されてもよいし、他の情報(例えば、トランスミッションのタービン回転数、電気自動車の場合には駆動モータの回転数等)に基づいて演算されてもよい。また、車速Vは、現時点t=t1での車速であってもよいし、画像取得時点t=tgでの車速であってもよいし、時間Δtにおける平均車速であってよい。或いは、時間Δtを細分した各時点の車速に基づいて、積分により補正距離Lを正確に算出してもよい。
【0043】
続くステップ170では、マップマッチング部26は、地図データベース30に格納される認識地物の位置データ(位置座標)を基準として、相対距離L0と、補正距離Lとに基づいて、現時点t=t1の自車両の位置を算出する。或いは、等価であるが、マップマッチング部26は、補正距離Lにより補正した相対距離L0’(=L0+L)と、既知の地物の位置情報とに基づいて、現時点t=t1の自車両の位置を算出する。
【0044】
本ステップ170において、具体的には、マップマッチング部26は、時間Δtの間における車両の移動ベクトルを算出してよい。この場合、算出した移動ベクトルは、認識地物に対する車両の位置を表すベクトルに合成され、次いで、この合成ベクトルは、認識地物の位置座標の座標系に変換される。そして、認識地物の位置座標の座標系において、当該変換された合成ベクトルの始点を、認識地物の位置座標に対応させたときの、合成ベクトルの終点の位置座標を、現時点t=t1の自車両の位置として求める。
【0045】
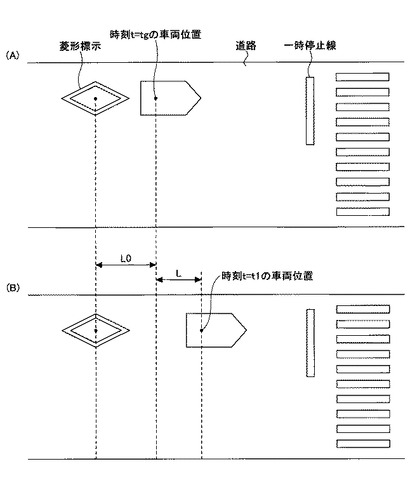
図3は、図2に示した自車両の位置の算出処理の意義に関する説明図であり、地物の位置と車両の位置と位置関係を概略的に示す平面図である。本例では、横断歩道のある一時停止線手前の路面上に描かれる菱形標示を、認識地物とした場合について説明する。
【0046】
図3(A)は、時刻t=tg、即ち認識地物を捕捉した画像が取得された時点における、菱形標示の位置と車両の位置の関係を概略的に示す。図3(A)には、マップマッチング部26により演算される菱形標示と車両の相対距離L0が示されている。
【0047】
図3(B)は、時刻t=t1、即ち現時点における菱形標示の位置と車両の位置の関係を概略的に示す。図3(B)に示すように、現時点t=t1では、時間Δt(=t1−tg)が経過しているため、その間の車両の移動量Lの分だけ、車両の位置が変化している。
【0048】
ところで、上述のマップマッチング部26の地物認識処理は、画像処理を伴うため、単純な演算処理に比べて、処理時間が長くなる。即ち、マップマッチング部26による上記のステップ120やステップ140の処理に要する時間は、例えばマップマッチング部26による上記のステップ170の演算処理時間に比べて、長くなる。
【0049】
従って、上述の如くマップマッチング部26により地物と自車両との相対距離L0が導出された時点で直ちに、当該相対距離L0と、既知の地物の位置情報とに基づいて、自車両の位置を演算した場合であっても、少なくともマップマッチング部26の地物認識処理に要する時間分だけ、車両の位置が変化しているため、得られる自車両の位置と、実際の現時点の車両位置との間にずれが生ずることになる。このようなずれは、マップマッチング部26の地物認識処理に要する時間が微少な時間であって小さいとしても、回避されることが望ましい。
【0050】
これに対して、本実施例では、画像取得時点t=tgから現時点t=t1までの時間Δtを考慮して、画像取得時点t=tgで得られた相対距離L0と、補正距離Lとに基づいて、自車両の位置(現時点t=t1の車両の位置)を算出するので、マップマッチング部26により要した処理時間に起因した精度悪化を回避して、高精度の車両の位置を算出することができる。
【0051】
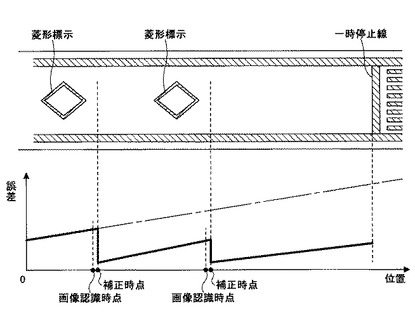
図4は、本実施例の測位部12により演算される自車両位置の演算精度(精度誤差)の変化態様を示す概念図である。
【0052】
測位部12は、認識すべき地物を認識した際には、上述の如く自車両の位置を補正するマップマッチングを行う。従って、図4に示すように、認識すべき地物を認識した直後(画像取得時点t=tg直後の補正時点)では、自車両の現在位置の精度は最も良くなり、その誤差は最も小さなものとなる。一方、測位部12は、自車両の位置を補正した後は、その位置からの推測軌跡に従って、自車両の現在位置を演算する。この場合には、図4に示すように、特に車速センサ22によるパルス誤差に起因して、車両の移動距離が長くなるほど、自車両の現在位置の精度誤差は大きくなる。換言すると、認識すべき地物を認識する毎に、上述の演算方法により、自車両の現在位置の精度誤差を最小化することができる。
【0053】
以上、本発明の好ましい実施例について詳説したが、本発明は、上述した実施例に制限されることはなく、本発明の範囲を逸脱することなく、上述した実施例に種々の変形及び置換を加えることができる。
【0054】
例えば、上述の実施例において、上述のマップマッチング部26の地物認識処理に要する時間が、各場面で動的に大きく変化しない場合には、適切な補正時間t2を予め導出しておいてもよい。この場合、補正距離L’を、補正時間t2と車速Vに基づいて導出し(例えばL’=t2×V)、次いで、自車両の位置(現時点t=t1の車両の位置)を、補正距離L’と、相対距離L0と、既知の地物の位置情報とに基づいて算出すればよい。
【0055】
また、上述の実施例は、道路表面に描かれる地物を認識対象とした場合に関するものであるが、本発明は、位置座標が既知の物体であれば、道路表面に描かれる地物に限られず、道路周辺に立てられる建物や看板等の如何なる認識対象に対しても、同様に適用可能である。
【0056】
また、例えば図3(A)に示したように、菱形標示は、バックカメラ32により捕捉される関係上、菱形標示の位置を車両が距離L0だけ通り過ぎた時点で認識される。この距離L0は、バックカメラ32の俯角や搭載位置等のような、動的に変化しないパラメータに依存する。即ち、地物が認識されるときの車両位置は、地物の種類と、バックカメラ32の俯角等に依存する。従って、予め地物の種類に応じて、地物が認識されるときの車両位置と当該地物の相対距離を導出しておき、かかる相対距離を、地物が認識された時点で用いてもよい。この場合、相対距離を画像処理により演算する処理負担が軽減される。例えば、図3(A)に示した例では、菱形標示を認識した時点で、相対距離を画像処理(演算処理を含む。)により導出せずに、予め導出しメモリに記憶しておいた相対距離リストの中から、菱形標示に係る相対距離L0を読み出せばよい。この場合、後は同様に、画像取得時刻に基づいて補正距離Lを演算し、当該演算した補正距離Lと、相対距離L0と、既知の地物の位置情報とに基づいて、自車両の位置(現時点t=t1の車両の位置)を算出すればよい。
【0057】
また、上述の実施例においては、車両の後部に配設されたバックカメラ32を用いて地物や走行レーンの認識を行うこととしているが、車両の前部に配設されたカメラを用いてそれらの認識を行うこととしてもよいし、また、外部インフラから送られてくる情報に基づいて地物などの認識を行うこととしてもよい。
【0058】
また、上述の実施例においては、地図データベース30を車両に搭載するものとしたが、センタに設けるシステムとし、車両がその都度通信アクセスしてその地図データベースに格納するデータを読み出せるようにしてもよい。
【0059】
更に、上述の実施例においては、支援制御として一時停止制御、交差点制御、速度制御、案内制御を挙げたが、自車両の位置に応じて実行される他の制御を行うシステムに適用することとしてもよい。
【図面の簡単な説明】
【0060】
【図1】本発明の一実施例である車両に搭載される支援制御装置の構成図である。
【図2】本実施例の測位部12のマップマッチング部26により実現される主要処理の流れを示すフローチャートである。
【図3】地物の位置と車両の位置と位置関係を概略的に示す平面図である。
【図4】精度誤差と走行位置との関係を表した図である。
【符号の説明】
【0061】
10 支援制御装置
12 測位部
14 支援制御部
30 地図データベース
36 現在地管理部
38 誤差レベル判定部
40 ECU
52 パターン記憶部
【技術分野】
【0001】
本発明は、車両に搭載され、該車両の位置を検出する車両位置検出装置に関する。
【背景技術】
【0002】
従来から、車両の進行方向における所定範囲を撮像する撮像手段と、前記撮像手段によって撮像された画像信号において、前記車両が停止すべきことを示す対象物を抽出する抽出手段と、前記抽出手段によって、前記車両が停止すべきことを示す複数の対象物が抽出された場合に、当該車両を停止させるための運転支援を行なう運転支援手段とを備えることを特徴とする車両運転支援装置知られている(例えば、特許文献1参照)。
【特許文献1】特開2005−170154号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
ところで、車両の位置を検出する方法としては、GPS(Global Positioning System)を用いた測位が一般的である。かかるGPS測位では、干渉測位などを用いた高精度測位方法が各種提案されている。また、GPS測位結果に基づく車両位置を、所与の地図データに基づく道路リンク上に補正するマップマッチング等も一般的である。また、例えば上記の特許文献1に記載の発明のように、対象物との相対距離が重要なアプリケーションでは、レーダーセンサや画像センサを用いるのが一般的である。
【0004】
しかしながら、車両位置に対する要求精度の増加に伴い、車両位置の演算に要する時間が長くなる傾向にある。一方、車両は、他の移動体(例えば人)に比べて高速に移動し、それ故に車両の位置は、時々刻々と比較的大きく変化する。従って、現時点の車両の位置を更に高精度に検出するには、このような演算処理時間に起因した誤差要因を適切に排除する必要がある。
【0005】
そこで、本発明は、演算処理時間に起因した誤差要因を適切に排除して、現時点の車両の位置を高精度に検出することができる車両位置検出装置の提供を目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するため、第1の発明は、車両に搭載され、該車両の位置を検出する車両位置検出装置において、
車両外に存在する特定の対象物の位置情報を記憶した記憶手段と、
前記特定の対象物を検出する対象物検出手段と、
前記対象物検出手段の検出データに基づいて、前記対象物検出手段により検出された対象物に対する車両の相対位置を導出する相対位置導出手段と、
前記記憶された対象物の位置情報を基準として、前記導出された対象物に対する車両の相対位置と、前記対象物検出手段の検出データの取得時点から前記相対位置を導出する時点までの補正時間とに基づいて、現時点の車両の位置を算出する車両位置算出手段と、を備えることを特徴とする。
【0007】
第2の発明は、第1の発明に係る車両位置検出装置において、
前記補正時間は、計測されるか、又は、予め導出された値が用いられることを特徴とする。
【0008】
第3の発明は、第1の発明に係る車両位置検出装置において、
前記車両位置算出手段は、
車速情報に基づいて、前記補正時間の間に車両が移動した移動量を算出し、
前記記憶された対象物の位置情報を基準として、前記演算された車両の相対位置と、前記算出した移動量とに基づいて、現時点の車両の位置を導出することを特徴とする。
【0009】
第4の発明は、第1から3のいずれかの発明に係る車両位置検出装置において、
前記対象物検出手段は、車両外を撮像するカメラを用いて前記特定の対象物を検出し、前記対象物検出手段の検出データの取得時点は、前記特定の対象物が撮像された画像の取得時点であることを特徴とする。これにより、比較的長い画像処理時間を必要とするカメラを用いる場合であっても、画像処理時間に起因した誤差要因を適切に排除することができる。
【0010】
第5の発明は、車両に搭載され、該車両の位置を検出する車両位置検出装置において、
車両外に存在する特定の対象物の位置情報を記憶した記憶手段と、
前記特定の対象物を検出する対象物検出手段と、
前記対象物検出手段の検出データに基づいて、前記対象物検出手段により検出された対象物に対する車両の相対位置を導出する相対位置導出手段と、
前記記憶された対象物の位置情報を基準として、前記導出された車両の相対位置と、前記対象物検出手段の検出データの取得時点から現時点までの時間とに基づいて、現時点の車両の位置を導出する車両位置算出手段と、を備えることを特徴とする。
【発明の効果】
【0011】
本発明によれば、演算処理時間に起因した誤差要因が適切に排除され、現時点の車両の位置を高精度に検出することができる。
【発明を実施するための最良の形態】
【0012】
以下、図面を参照して、本発明を実施するための最良の形態の説明を行う。
【0013】
図1は、本発明による車両位置検出装置の一実施例が組み込まれる支援制御システム10の構成図を示す。本実施例の支援制御システム10は、図1に示す如く、自車両の位置を測位するための測位部12と、自車両の走行等を制御するための支援制御部14と、を備えており、測位部12で測位される精度誤差の変動し得る自車両の位置に応じて、支援制御部14による自車両を走行させるうえでの所定の支援制御を実行するシステムである。尚、この支援制御は、例えば、イグニションオン後、車両運転者がその制御実行を許可するスイッチオン後に開始されるものとすればよい。尚、自車両の位置は、厳密には車体のどの箇所を基準にするかによって異なってくる。従って、以下では、説明の都合上、自車両の位置は、車両の後軸中心を基準にして管理されているものとする。
測位部12は、GPS(Global Positioning System)受信機16と、ヨーセンサ18と、Gセンサ20と、車速センサ22と、を有している。GPS受信機16は、GPS衛星から送信されるGPS信号を受信することにより、地球上における自車両の現在位置の緯度及び経度並びに現在時刻を検知する。ヨーセンサ18は、地磁気センサやジャイロセンサであって、自車両のヨー角(方位)を検知する。Gセンサ20は、自車両の前後の加減速度を検知する。また、車速センサ22は、自車両の車速を検知する。
【0014】
GPS受信機16、ヨーセンサ18、Gセンサ20、及び車速センサ22の出力は、主にマイクロコンピュータにより構成された推測航法部24に接続されている。各受信機やセンサ16〜22の出力信号はそれぞれ、推測航法部24に供給される。推測航法部24は、GPS受信機16からの情報に基づいて自車両の現在位置の緯度及び経度(初期座標)を検出すると共に、センサ18〜22からの情報に基づいて自車両の進行方位などの走行状態を検出して、自車両位置の初期座標からの車両の走行軌跡(推測軌跡)を作成する。
【0015】
測位部12は、また、推測航法部24に接続する主にマイクロコンピュータにより構成されたマップマッチング部26、及び、マップマッチング部26に接続する地図データベース30を有している。地図データベース30は、車両に搭載されたハードディスク(HDD)やDVD,CDなどにより構成されており、道路自体のリンク情報や道路に描かれ或いは設置される地物や車線レーンの情報などの各種地図データを格納している。
【0016】
尚、この地図データベース30に格納される地図データは、道路を表す緯度・経度や曲率,勾配,車線数,車線幅,コーナ有無などのレーン形状や道路種別のデータや、その道路の表面に描かれる横断歩道や一時停止線,進行方向矢印,「横断歩道あり」の菱形標示,最高速度標示,転回禁止標示などの各地物ごとの形状データやペイントデータ,位置データ,各地物間の距離データなどである。また、この地図データベース30は、ディスクの交換や更新条件の成立により格納する地図データを最新のものに更新可能である。
【0017】
マップマッチング部26には、推測航法部24においてマップマッチングのために作成された自車両位置の初期座標からの推測軌跡の情報が供給される。マップマッチング部26は、推測航法部24から推測軌跡の情報が供給されるごとに、自車両の現在位置を地図データベース30に格納されている道路自体のリンク情報を利用してその道路リンク上に補正するマップマッチングを行う。
【0018】
マップマッチング部26は、マップマッチングの結果得られた自車両の現在位置から自車両が今後所定時間内又は所定距離内に走行すると推測される道路範囲の地図データを地図データベース30から読み出す。そして、その現在位置からの所定道路範囲において認識すべき地物が描かれ或いは設置されているか否かを判別することにより、後述のバックカメラによる撮像画像を認識すべきか否かを判別する。
【0019】
測位部12は、また、マップマッチング部26に接続するバックカメラ32を有している。バックカメラ32は、車両後部バンパなどに配設されており、その配設位置から車両後方の道路表面を含む所定領域の外界を撮影することができる。バックカメラ32の撮像画像は、マップマッチング部26に供給される。
【0020】
マップマッチング部26は、バックカメラ32による撮像画像を認識すべきと判別する場合において、バックカメラ32から撮像画像が供給されたとき、その撮像画像についてエッジ抽出などの画像処理を行うことにより、道路表面に描かれる上記の地物や走行レーンなどを検出すると共に、それら地物等と自車両との相対位置関係を把握する。尚、この地物や走行レーンの検出に際しては、その効率化を図る観点から、マップマッチング部26や地図データベース30から提供される地物等の特徴データに基づいて、事前にその地物等が存在する道路のエリアを把握して、バックカメラ32による全撮像画像に対してその存在領域を重点的に絞って画像処理を行うこととしてもよい。
【0021】
マップマッチング部26は、バックカメラ32の撮像画像からの走行レーンの検出結果に基づいて、自車両が現に走行する道路上における自車両に対する自レーンの位置を算出する。また、地物の検出結果に基づいて、自車両と自車両の道路後方に存在する認識した地物との相対関係(具体的には、自車両から認識地物までの距離)を測定し、そして、その測定結果と、地図データベース30に格納されているその認識地物の位置データとに基づいて、自車両の位置を算出(補正)する。この自車両の位置の算出処理(補正処理)の詳細は後述する。
【0022】
マップマッチング部26は、上記の如く、推測航法部24から推測軌跡の情報が供給されるごとに、自車両の現在位置を地図データベース30に格納されている道路リンク上に補正するマップマッチングを行うと共に、更に、バックカメラ32の撮像画像から認識すべき地物が認識された際にも、その認識結果による位置へ自車両の位置を補正するマップマッチングを行う。マップマッチング部26は、後に詳述する如く、マップマッチングの結果として測位される自車両の現在位置の精度を示す正確性(すなわち自信度)を算出する。
【0023】
マップマッチング部26は、また、マップマッチングにより自車両の位置を測位すると、自車両の進行方向前方に、上記した支援制御を実行するのに必要な制御対象である目標の地物(例えば、停止線や交差点,カーブ進入口等)が存在するときは、測位した自車両の位置と地図データベース30に格納されているその目標地物の位置との関係に基づいて、自車両からその目標地物までの距離(以下、道なり残距離と称す)を算出する。
【0024】
測位部12は、また、マップマッチング部26に接続する現在地管理部36を有している。現在地管理部36には、マップマッチング部26で算出されたマップマッチングの結果得られた自車両の現在位置のリンクIDやリンク座標,その位置精度を示す自信度の情報、自車両が現に走行する道路における走行レーンの情報、及び、自車両から目標地物までの道なり残距離の情報がその得られた時刻の情報と共に供給される。また、現在地管理部36には、地図データベース30における地図データの更新後の経過時間や更新条件などの更新履歴情報が供給される。
【0025】
現在地管理部36は、マップマッチング部26から供給される情報に基づいて、測位された自車両の現在位置や目標地物までの道なり残距離を検出すると共に、測位された自車両の現在位置の自信度を示す精度の誤差を検知する。現在地管理部36で検出された自車両の現在位置や道なり残距離の情報は、例えば自車両の有するナビゲーション装置に供給されて、その表示ディスプレイに表示されている地図上に模式的に表示される。
【0026】
支援制御システム10は、現在地管理部36に接続される誤差レベル判定部38を備えている。誤差レベル判定部38には、現在地管理部36で検知され管理されている自車両の現在位置を測位するうえでの位置精度の誤差を示す情報が供給される。誤差レベル判定部38は、自車両の現在位置を測位するうえでの位置精度誤差と、支援制御部14による支援制御の後述の各制御レベルをそれぞれ適切に実行するうえで必要な測位の精度誤差レベルとの関係を予めマップとして有している。誤差レベル判定部38は、現在地管理部36から供給される測位部12で自車両の現在位置を測位するうえでの位置精度誤差の情報に基づいて、その都度、その精度誤差レベルを特定する。尚、精度誤差レベルは、予め位置精度誤差の大きさに応じた複数の段階的なレベルを有するものであればよい(レベル1〜レベルn)。
【0027】
誤差レベル判定部38による判定結果、及び、現在地管理部36による測位した自車両の現在位置座標や自車両から目標地物までの相対関係の情報は、上記した支援制御部14に供給される。支援制御部14は、マイクロコンピュータを主体に構成された電子制御ユニット(ECU)40を備えており、ECU40により自車両を道路上で走行させる際の運転者への支援制御を実行する。
【0028】
この支援制御は、自車両の位置に応じて実行される例えば、特に運転者によるブレーキ操作が行われないときや遅れているときなどに自車両を道路上の地物である一時停止線や踏み切りなどで停車させるための運転支援制御である一時停止制御、自車両を道路上の地物である交差点で交差すると予測される他車両と交錯させないための運転支援制御である交差点制御、自車両を地物であるカーブ(コーナー)に対して適切な速度で進入走行させるための速度制御、目標地物までの相対距離に対する音声による経路案内を行うための案内制御などである。
【0029】
ECU40には、自車両に適当な制動力を発生させるためのブレーキアクチュエータ42、自車両に適当な駆動力を付与するためのスロットルアクチュエータ44、自車両の自動変速機の変速段を切り替えるためのシフトアクチュエータ46、自車両に適当な操舵角を付与するためのステアアクチュエータ48、及び車室内に向けてブザー吹鳴や警報出力,スピーカ出力を行うためのブザー警報器50が接続されている。ECU40は、後に詳述する如く、現在地管理部36で管理されている測位された自車両の現在位置や誤差レベル判定部38で特定された精度誤差レベル等に基づいて、各アクチュエータ42〜50に対して適当な駆動指令を行う。各アクチュエータ42〜50は、ECU40から供給される駆動指令に従って駆動される。
【0030】
支援制御部14は、また、ECU40による支援制御を実行するうえで用いられる出力/実行パターンの情報を格納するパターン記憶部52を有している。この出力/実行パターンは、支援制御ごとに定められている。パターン記憶部52には、上記した誤差レベル判定部38により特定される複数の段階的な精度誤差レベルに対応した複数の支援形態(制御レベル)である出力/実行パターン(レベル1〜レベルn)が支援制御ごとに格納されている。
【0031】
例えば、上記の如き自車両を一時停止線等で停車させるための一時停止制御においては、測位精度が高くその誤差が小さい順に、自車両を主にブレーキアクチュエータ42を用いて自動的に制動させて一時停止線等で停車させる回避制御パターン(レベル1)、一時停止線等の手前で自車両を自動的にアクセルオフして減速させ或いはシフトアクチュエータ46を用いてエンジンブレーキを作動させ、また、運転者によるブレーキ操作時には自車両に通常よりも大きな制動力を発生させる減速制御パターン(レベル2)、ブザー警報器50を用いて前方の一時停止線等で自車両を停車させるためにブレーキ操作を行うべきことを運転者に知らせる判断補助パターン(レベル3)、及びブザー警報器50を用いて運転者に対して前方に一時停止線等が存在することを注意喚起する存在情報提供パターン(レベル4)が格納される。
【0032】
また、上記の如き自車両を道路上の交差点で他車両と交錯させないための交差点制御においては、自車両を主にブレーキアクチュエータ42やステアアクチュエータ48を用いて自動的に制動させ或いは操舵させて交差点での他車両との交錯を回避させる回避制御パターン(レベル1)、交差点の手前で自車両を自動的にアクセルオフして減速させ或いはシフトアクチュエータ46を用いてエンジンブレーキを作動させ、また、運転者によるブレーキ操作時に自車両に通常よりも大きな制動力を発生させる減速制御パターン(レベル2)、ブザー警報器50を用いて前方の交差点で自車両を減速若しくは停車させるためにブレーキ操作を行うべきことを運転者に知らせる判断補助パターン(レベル3)、及びブザー警報器50を用いて運転者に対して前方の交差点で他車両と交錯する可能性があることを注意喚起する存在情報提供パターン(レベル4)が格納される。
【0033】
また、上記の如く目標地物(例えば右折交差点)までの相対距離に対する音声による経路案内を行うための案内制御においては、自車両が目標地物に到達する直前(例えば5メートル手前)でその目標地物の存在を運転者に知らせるパターン(レベル1)、自車両が目標地物に到達する第2所定距離(例えば10メートル手前)でその目標地物の存在を運転者に知らせるパターン(レベル2)、自車両が目標地物に到達する第3所定距離(例えば40メートル手前)でその目標地物の存在を運転者に知らせるパターン(レベル3)、自車両が目標地物に到達する第4距離(例えば80メートル手前)でその目標地物の存在を運転者に知らせるパターン(レベル4)が格納される。
【0034】
支援制御の各支援形態にはそれぞれ、予め、制御を開始すべきタイミング(車速に応じて可変するのがよい。)が定められており、大きい誤差に対応した支援形態の方が、小さい誤差に対応した支援形態に比べて、測位される自車両と制御対象の目標地物との間の距離がより長い時期に、すなわち、自車両が目標地物に接近する際により早いタイミングでその実行が開始されるように定められている。
【0035】
例えば、一時停止制御が実行される状況においては、ある車速での走行時は、存在情報提供パターン(レベル4)の支援形態による注意喚起は、測位された目標地物までの距離が100メートルになった時点で開始されるが、回避制御パターン(レベル1)の支援形態による制動ブレーキは、測位された目標地物までの距離が30メートルになった時点で開始される。また、目標地物(例えば右折交差点)までの相対距離に対する音声による経路案内を行うための案内制御が実行される状況においては、ある車速での走行時は、レベル4の支援形態による音声案内は、測位された目標地物までの距離が80メートルになった時点で開始されるが、レベル1の支援形態による音声案内は、測位された目標地物までの距離が5メートルになった時点で開始される。
【0036】
次に、本実施例の測位部12のマップマッチング部26により実現される自車両の位置の算出処理(補正処理)について、詳説していく。図2は、本実施例の測位部12のマップマッチング部26により実現される関連処理の流れを示すフローチャートである。マップマッチング部26には、バックカメラ32からの撮像画像が適切なフレームレートのストリーム形式で供給される。マップマッチング部26は、フレーム周期毎に、以下の処理を実行する。
【0037】
ステップ100では、マップマッチング部26は、バックカメラ32から撮像画像を取得する。
【0038】
ステップ110では、マップマッチング部26は、撮像画像を取得した時点t=tg(フレーム周期毎に変化)を所定のメモリに記憶する。
【0039】
ステップ120では、マップマッチング部26は、上述の如く画像処理を行い、ステップ130では、道路表面に描かれる地物が認識されたか否か(地物に係る特徴点が抽出されたか否か)を判定する。地物が認識されたと判定した場合には、ステップ140に進み、地物が認識されないと判定した場合には、ステップ100に戻る。ステップ100に戻る場合、次のフレームの撮像画像に対して、ステップ110及びステップ120の処理が実行されることになる。
【0040】
ステップ140では、マップマッチング部26は、認識された地物と自車両との相対距離L0[m]を算出する。
【0041】
ステップ150では、マップマッチング部26は、算出した地物と自車両との相対距離L0と、地物が認識された撮像画像の取得時点(t=tg)とを、対応付けて記憶する。尚、上記ステップ120等において、地物認識(及び相対距離L0の算出)に複数のフレームの画像が用いられた場合には、最終的に算出された相対距離L0にもっとも適合した画像の取得時間(t=tg)が出力される。
【0042】
ステップ160では、マップマッチング部26は、上記のステップ150の処理により相対距離L0及び画像取得時点tgを導出すると、マップマッチング部26は、画像取得時点t=tgから現時点t=t1までの時間Δtと、車速Vに基づいて、時間Δtの間に車両が移動した距離L(以下、「補正距離」という)を算出する。尚、車速Vは、車速センサ22の出力信号に基づいて演算されてもよいし、他の情報(例えば、トランスミッションのタービン回転数、電気自動車の場合には駆動モータの回転数等)に基づいて演算されてもよい。また、車速Vは、現時点t=t1での車速であってもよいし、画像取得時点t=tgでの車速であってもよいし、時間Δtにおける平均車速であってよい。或いは、時間Δtを細分した各時点の車速に基づいて、積分により補正距離Lを正確に算出してもよい。
【0043】
続くステップ170では、マップマッチング部26は、地図データベース30に格納される認識地物の位置データ(位置座標)を基準として、相対距離L0と、補正距離Lとに基づいて、現時点t=t1の自車両の位置を算出する。或いは、等価であるが、マップマッチング部26は、補正距離Lにより補正した相対距離L0’(=L0+L)と、既知の地物の位置情報とに基づいて、現時点t=t1の自車両の位置を算出する。
【0044】
本ステップ170において、具体的には、マップマッチング部26は、時間Δtの間における車両の移動ベクトルを算出してよい。この場合、算出した移動ベクトルは、認識地物に対する車両の位置を表すベクトルに合成され、次いで、この合成ベクトルは、認識地物の位置座標の座標系に変換される。そして、認識地物の位置座標の座標系において、当該変換された合成ベクトルの始点を、認識地物の位置座標に対応させたときの、合成ベクトルの終点の位置座標を、現時点t=t1の自車両の位置として求める。
【0045】
図3は、図2に示した自車両の位置の算出処理の意義に関する説明図であり、地物の位置と車両の位置と位置関係を概略的に示す平面図である。本例では、横断歩道のある一時停止線手前の路面上に描かれる菱形標示を、認識地物とした場合について説明する。
【0046】
図3(A)は、時刻t=tg、即ち認識地物を捕捉した画像が取得された時点における、菱形標示の位置と車両の位置の関係を概略的に示す。図3(A)には、マップマッチング部26により演算される菱形標示と車両の相対距離L0が示されている。
【0047】
図3(B)は、時刻t=t1、即ち現時点における菱形標示の位置と車両の位置の関係を概略的に示す。図3(B)に示すように、現時点t=t1では、時間Δt(=t1−tg)が経過しているため、その間の車両の移動量Lの分だけ、車両の位置が変化している。
【0048】
ところで、上述のマップマッチング部26の地物認識処理は、画像処理を伴うため、単純な演算処理に比べて、処理時間が長くなる。即ち、マップマッチング部26による上記のステップ120やステップ140の処理に要する時間は、例えばマップマッチング部26による上記のステップ170の演算処理時間に比べて、長くなる。
【0049】
従って、上述の如くマップマッチング部26により地物と自車両との相対距離L0が導出された時点で直ちに、当該相対距離L0と、既知の地物の位置情報とに基づいて、自車両の位置を演算した場合であっても、少なくともマップマッチング部26の地物認識処理に要する時間分だけ、車両の位置が変化しているため、得られる自車両の位置と、実際の現時点の車両位置との間にずれが生ずることになる。このようなずれは、マップマッチング部26の地物認識処理に要する時間が微少な時間であって小さいとしても、回避されることが望ましい。
【0050】
これに対して、本実施例では、画像取得時点t=tgから現時点t=t1までの時間Δtを考慮して、画像取得時点t=tgで得られた相対距離L0と、補正距離Lとに基づいて、自車両の位置(現時点t=t1の車両の位置)を算出するので、マップマッチング部26により要した処理時間に起因した精度悪化を回避して、高精度の車両の位置を算出することができる。
【0051】
図4は、本実施例の測位部12により演算される自車両位置の演算精度(精度誤差)の変化態様を示す概念図である。
【0052】
測位部12は、認識すべき地物を認識した際には、上述の如く自車両の位置を補正するマップマッチングを行う。従って、図4に示すように、認識すべき地物を認識した直後(画像取得時点t=tg直後の補正時点)では、自車両の現在位置の精度は最も良くなり、その誤差は最も小さなものとなる。一方、測位部12は、自車両の位置を補正した後は、その位置からの推測軌跡に従って、自車両の現在位置を演算する。この場合には、図4に示すように、特に車速センサ22によるパルス誤差に起因して、車両の移動距離が長くなるほど、自車両の現在位置の精度誤差は大きくなる。換言すると、認識すべき地物を認識する毎に、上述の演算方法により、自車両の現在位置の精度誤差を最小化することができる。
【0053】
以上、本発明の好ましい実施例について詳説したが、本発明は、上述した実施例に制限されることはなく、本発明の範囲を逸脱することなく、上述した実施例に種々の変形及び置換を加えることができる。
【0054】
例えば、上述の実施例において、上述のマップマッチング部26の地物認識処理に要する時間が、各場面で動的に大きく変化しない場合には、適切な補正時間t2を予め導出しておいてもよい。この場合、補正距離L’を、補正時間t2と車速Vに基づいて導出し(例えばL’=t2×V)、次いで、自車両の位置(現時点t=t1の車両の位置)を、補正距離L’と、相対距離L0と、既知の地物の位置情報とに基づいて算出すればよい。
【0055】
また、上述の実施例は、道路表面に描かれる地物を認識対象とした場合に関するものであるが、本発明は、位置座標が既知の物体であれば、道路表面に描かれる地物に限られず、道路周辺に立てられる建物や看板等の如何なる認識対象に対しても、同様に適用可能である。
【0056】
また、例えば図3(A)に示したように、菱形標示は、バックカメラ32により捕捉される関係上、菱形標示の位置を車両が距離L0だけ通り過ぎた時点で認識される。この距離L0は、バックカメラ32の俯角や搭載位置等のような、動的に変化しないパラメータに依存する。即ち、地物が認識されるときの車両位置は、地物の種類と、バックカメラ32の俯角等に依存する。従って、予め地物の種類に応じて、地物が認識されるときの車両位置と当該地物の相対距離を導出しておき、かかる相対距離を、地物が認識された時点で用いてもよい。この場合、相対距離を画像処理により演算する処理負担が軽減される。例えば、図3(A)に示した例では、菱形標示を認識した時点で、相対距離を画像処理(演算処理を含む。)により導出せずに、予め導出しメモリに記憶しておいた相対距離リストの中から、菱形標示に係る相対距離L0を読み出せばよい。この場合、後は同様に、画像取得時刻に基づいて補正距離Lを演算し、当該演算した補正距離Lと、相対距離L0と、既知の地物の位置情報とに基づいて、自車両の位置(現時点t=t1の車両の位置)を算出すればよい。
【0057】
また、上述の実施例においては、車両の後部に配設されたバックカメラ32を用いて地物や走行レーンの認識を行うこととしているが、車両の前部に配設されたカメラを用いてそれらの認識を行うこととしてもよいし、また、外部インフラから送られてくる情報に基づいて地物などの認識を行うこととしてもよい。
【0058】
また、上述の実施例においては、地図データベース30を車両に搭載するものとしたが、センタに設けるシステムとし、車両がその都度通信アクセスしてその地図データベースに格納するデータを読み出せるようにしてもよい。
【0059】
更に、上述の実施例においては、支援制御として一時停止制御、交差点制御、速度制御、案内制御を挙げたが、自車両の位置に応じて実行される他の制御を行うシステムに適用することとしてもよい。
【図面の簡単な説明】
【0060】
【図1】本発明の一実施例である車両に搭載される支援制御装置の構成図である。
【図2】本実施例の測位部12のマップマッチング部26により実現される主要処理の流れを示すフローチャートである。
【図3】地物の位置と車両の位置と位置関係を概略的に示す平面図である。
【図4】精度誤差と走行位置との関係を表した図である。
【符号の説明】
【0061】
10 支援制御装置
12 測位部
14 支援制御部
30 地図データベース
36 現在地管理部
38 誤差レベル判定部
40 ECU
52 パターン記憶部
【特許請求の範囲】
【請求項1】
車両に搭載され、該車両の位置を検出する車両位置検出装置において、
車両外に存在する特定の対象物の位置情報を記憶した記憶手段と、
前記特定の対象物を検出する対象物検出手段と、
前記対象物検出手段の検出データに基づいて、前記対象物検出手段により検出された対象物に対する車両の相対位置を導出する相対位置導出手段と、
前記記憶された対象物の位置情報を基準として、前記導出された対象物に対する車両の相対位置と、前記対象物検出手段の検出データの取得時点から前記相対位置を導出する時点までの補正時間とに基づいて、現時点の車両の位置を算出する車両位置算出手段と、を備えることを特徴とする車両位置検出装置。
【請求項2】
前記補正時間は、計測されるか、又は、予め導出された値が用いられる、請求項1に記載の車両位置検出装置。
【請求項3】
前記車両位置算出手段は、
車速情報に基づいて、前記補正時間の間に車両が移動した移動量を算出し、
前記記憶された対象物の位置情報を基準として、前記演算された車両の相対位置と、前記算出した移動量とに基づいて、現時点の車両の位置を導出する、請求項1に記載の車両位置検出装置。
【請求項4】
前記対象物検出手段は、車両外を撮像するカメラを用いて前記特定の対象物を検出し、前記対象物検出手段の検出データの取得時点は、前記特定の対象物が撮像された画像の取得時点である、請求項1から3のいずれかに記載の車両位置検出装置。
【請求項5】
車両に搭載され、該車両の位置を検出する車両位置検出装置において、
車両外に存在する特定の対象物の位置情報を記憶した記憶手段と、
前記特定の対象物を検出する対象物検出手段と、
前記対象物検出手段の検出データに基づいて、前記対象物検出手段により検出された対象物に対する車両の相対位置を導出する相対位置導出手段と、
前記記憶された対象物の位置情報を基準として、前記導出された車両の相対位置と、前記対象物検出手段の検出データの取得時点から現時点までの時間とに基づいて、現時点の車両の位置を導出する車両位置算出手段と、を備えることを特徴とする車両位置検出装置。
【請求項1】
車両に搭載され、該車両の位置を検出する車両位置検出装置において、
車両外に存在する特定の対象物の位置情報を記憶した記憶手段と、
前記特定の対象物を検出する対象物検出手段と、
前記対象物検出手段の検出データに基づいて、前記対象物検出手段により検出された対象物に対する車両の相対位置を導出する相対位置導出手段と、
前記記憶された対象物の位置情報を基準として、前記導出された対象物に対する車両の相対位置と、前記対象物検出手段の検出データの取得時点から前記相対位置を導出する時点までの補正時間とに基づいて、現時点の車両の位置を算出する車両位置算出手段と、を備えることを特徴とする車両位置検出装置。
【請求項2】
前記補正時間は、計測されるか、又は、予め導出された値が用いられる、請求項1に記載の車両位置検出装置。
【請求項3】
前記車両位置算出手段は、
車速情報に基づいて、前記補正時間の間に車両が移動した移動量を算出し、
前記記憶された対象物の位置情報を基準として、前記演算された車両の相対位置と、前記算出した移動量とに基づいて、現時点の車両の位置を導出する、請求項1に記載の車両位置検出装置。
【請求項4】
前記対象物検出手段は、車両外を撮像するカメラを用いて前記特定の対象物を検出し、前記対象物検出手段の検出データの取得時点は、前記特定の対象物が撮像された画像の取得時点である、請求項1から3のいずれかに記載の車両位置検出装置。
【請求項5】
車両に搭載され、該車両の位置を検出する車両位置検出装置において、
車両外に存在する特定の対象物の位置情報を記憶した記憶手段と、
前記特定の対象物を検出する対象物検出手段と、
前記対象物検出手段の検出データに基づいて、前記対象物検出手段により検出された対象物に対する車両の相対位置を導出する相対位置導出手段と、
前記記憶された対象物の位置情報を基準として、前記導出された車両の相対位置と、前記対象物検出手段の検出データの取得時点から現時点までの時間とに基づいて、現時点の車両の位置を導出する車両位置算出手段と、を備えることを特徴とする車両位置検出装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2007−309670(P2007−309670A)
【公開日】平成19年11月29日(2007.11.29)
【国際特許分類】
【出願番号】特願2006−136315(P2006−136315)
【出願日】平成18年5月16日(2006.5.16)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
【公開日】平成19年11月29日(2007.11.29)
【国際特許分類】
【出願日】平成18年5月16日(2006.5.16)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
[ Back to top ]