
車両位置演算装置
【課題】 GPSといった無線通信手段を利用した場合であっても、車両の位置情報を的確に把握可能な車両制御システムを提供すること。
【解決手段】 この車両制御システム10は、車両が移動する移動方向を示す移動方向情報を取得する方向取得部301と、GPSといった車両外の無線通信手段との間における無線通信結果に基づいて、車両の位置を示すと想定される想定位置情報を時系列に沿って取得する位置取得部302と、移動方向情報が示す移動方向と想定位置情報の変動方向とに基づいて、車両の位置を示す車両位置情報を算出する位置演算部303と、を備える。
【解決手段】 この車両制御システム10は、車両が移動する移動方向を示す移動方向情報を取得する方向取得部301と、GPSといった車両外の無線通信手段との間における無線通信結果に基づいて、車両の位置を示すと想定される想定位置情報を時系列に沿って取得する位置取得部302と、移動方向情報が示す移動方向と想定位置情報の変動方向とに基づいて、車両の位置を示す車両位置情報を算出する位置演算部303と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両位置演算装置に関する。
【背景技術】
【0002】
通信技術の発展に伴い、いわゆる車車間通信を利用した交通制御システムが提案されている(例えば、下記特許文献1参照)。下記特許文献1に記載されている交通制御システムは、車車間通信によって車両に関する様々な情報を交換している。その交換する情報にあって、車両の位置情報はナビゲーションシステムを利用して取得している。
【特許文献1】特開平11−110693号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
ナビゲーションシステムによる位置情報の取得は、主にGPS(Global Positioning System)を利用するのが一般的である。GPSは位置情報の取得手段としては一般的であるが、その性質上、常に小刻みな位置変動を繰り返しており、例えば車両が停止していても位置情報は小刻みに変動している。また、GPSはGPS衛星の捕捉状況等によりある程度の誤差の発生は避けられない。従って、GPSによって取得した位置情報を用いて何らかの車両制御を行おうとすると、GPSの誤差によって必ずしも的確な車両制御が行えない場合も想定される。
【0004】
そこで本発明では、GPSといった無線通信手段を利用した場合であっても、車両の位置情報を的確に把握可能な車両位置演算装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明に係る車両位置演算装置は、車両の位置を示す車両位置情報を演算する車両位置演算装置であって、車両が移動する移動方向を示す移動方向情報を取得する方向取得手段と、車両外の無線通信手段との間における無線通信結果に基づいて、車両の位置を示すと想定される想定位置情報を時系列に沿って取得する位置取得手段と、移動方向情報が示す移動方向と、想定位置情報の変動方向とに基づいて、車両の位置を示す車両位置情報を算出する位置演算手段と、を備える。
【0006】
本発明に係る車両位置演算装置によれば、演算対象となる車両の移動方向と、例えばGPSといった無線通信手段によって得られる想定位置情報の変動方向とに基づいて、車両位置情報を算出するので、車両の移動方向とは異なる方向の変動を排除することができ、車両位置情報をより的確に把握することができる。
【0007】
また本発明に係る車両位置演算装置では、位置演算手段は、移動方向情報が示す移動方向と、想定位置情報の変動方向とを比較し、それらが指し示す向きが一致しない場合は車両は停止していると判断して車両位置情報を算出することも好ましい。
【0008】
また本発明に係る車両位置演算装置では、無線通信手段との間における無線通信を行う通信手段を備え、当該通信手段がその機能を停止した場合に、方向取得手段は、通信手段が停止する直前に取得した想定位置情報の変動方向を移動方向とみなし、移動方向情報として取得することも好ましい。
【0009】
また本発明に係る車両位置演算装置では、当該車両位置演算装置が演算対象とする車両は、当該車両位置演算装置が搭載される車両とは別の他車両であって、移動方向情報及び想定位置情報は他車両から送信されるものであることも好ましい。
【0010】
また本発明に係る車両位置演算装置では、移動方向情報は、車両の方向指示器が指し示す方向を特定するウインカー情報を含むことも好ましい。
【発明の効果】
【0011】
本発明によれば、車両の移動方向とは異なる方向の変動を排除することができ、車両位置情報をより的確に把握することができる。
【発明を実施するための最良の形態】
【0012】
以下、添付図面を参照しながら本発明の好適な実施の形態について説明する。説明の理解を容易にするため、各図面において同一の構成要素に対しては可能な限り同一の符号を付して、重複する説明は省略する。
【0013】
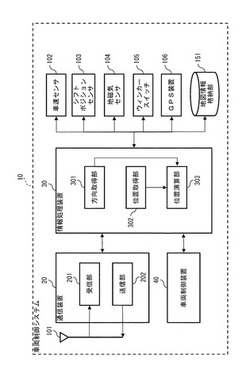
本発明の実施形態である車両制御システムについて図1を参照しながら説明する。図1は車両制御システム10(車両位置演算装置)の構成を示す図である。車両制御システム10は、通信装置20と、情報処理装置30と、車両制御装置40とを備えている。車両制御システム10は更に、アンテナ101と、車速センサ102と、シフトポジションセンサ104と、地磁気センサ105と、ウインカースイッチ106と、GPS装置107(通信手段)と、地図情報格納部151とを備えている。車速センサ102、シフトポジションセンサ103、地磁気センサ104、ウインカースイッチ105、及びGPS装置106は、この車両制御システム10が搭載される車両の自車信号を収集するためのセンサ、スイッチ、及び装置である。引き続いて各構成要素について説明する。
【0014】
車速センサ102は、車両制御装置10が搭載される車両の速度を検出するためのセンサであって、その検出した速度を示す信号(情報)を情報処理装置30に出力する。シフトポジションセンサ103は、車両制御装置10が搭載される車両のシフトポジションを検出するためのセンサであって、その検出したシフトポジションを示す信号(情報)を情報処理装置30に出力する。
【0015】
地磁気センサ104は、地磁気を検出することで、車両制御装置10が搭載される車両の向いている方角を示す信号(情報)を情報処理装置30に出力する。ウインカースイッチ105は、車両制御装置10が搭載される車両の方向指示器(ウインカー)のスイッチであって、その指し示す方向を示す信号(情報)を情報処理装置30に出力する。
【0016】
GPS装置106は、車両制御装置10が搭載される車両外のGPS衛星(無線通信手段)との間における無線通信結果に基づいて、その車両の位置を示すと想定される想定位置情報を取得する装置である。GPS装置106は、この取得した想定位置情報を順次情報処理装置301に出力する。従って、情報処理装置30は、想定位置情報を時系列に沿って取得することができる。地図情報格納部151は、地図情報を格納する部分である。この地図情報には、道路に関する情報が含まれている。
【0017】
通信装置20は、アンテナ101を介して他の車両と車車間通信を行うための通信装置である。通信装置20は、受信部201と、送信部202とを有している。受信部201は、他の車両から送信される信号(情報)を受信し、情報処理装置30に出力する部分である。送信部202は、情報処理装置30から出力される信号(情報)を、他の車両に送信する部分である。
【0018】
情報処理装置30は、車両制御装置40が所定の制御処理を行うために必要となる自車両の位置を示す車両位置情報及び他車両の位置を示す車両位置情報をそれぞれ算出する装置である。
【0019】
情報処理装置30は、物理的には、CPUやRAM、ROMを含むコンピュータである。情報処理装置30は、機能的な構成要素として、方向取得部301(方向取得手段)と、位置取得部302(位置取得手段)と、位置演算部303(位置演算手段)とを備えている。
【0020】
方向取得部301は、車両が移動する移動方向を示す移動方向情報を取得する部分である。方向取得部301は、この車両制御装置40が搭載されている車両の移動方向に加えて、他車両の移動方向も取得する部分である。方向取得部301による移動方向取得の詳細については後述する。方向取得部301は、取得した移動方向情報を位置演算部303に出力する。
【0021】
また、方向取得部301は、GPS装置106がその機能を停止した場合に、GPS装置106が停止する直前に取得した想定位置情報の変動方向を移動方向とみなし、移動方向情報として取得する。
【0022】
位置取得部302は、車両外の無線通信手段との間における無線通信結果に基づいて、車両の位置を示すと想定される想定位置情報を時系列に沿って取得する部分である。本実施形態の場合、車両制御装置40のGPS装置106とGPS衛星との無線通信結果に基づいて想定位置情報を取得している。また、位置取得部302は、他車両から送信される情報に基づいて、他車両の位置を示すと想定される想定位置情報を時系列に沿って取得する。位置取得部302は、取得したこれらの想定位置情報を位置演算部303に出力する。
【0023】
位置演算部303は、方向取得部301から出力される移動方向情報が示す移動方向と、位置取得部302から出力される想定位置情報の変動方向とに基づいて、自車両又は他車両の位置を示す車両位置情報を算出する部分である。
【0024】
より具体的には、位置演算部303は、移動方向情報が示す移動方向と、想定位置情報の変動方向とを比較し、それらが指し示す向きが一致しない場合は対象となる車両は停止していると判断して車両位置情報を算出する。位置演算部303は、算出した車両位置情報を車両制御装置40及び通信装置20に出力する。
【0025】
車両制御装置40は、情報処理装置30から出力される自車両及び他車両の車両位置情報に基づいて、この車両制御装置10が搭載されている車両のHMI(Human Machine Interface)制御を行う装置である。
【0026】
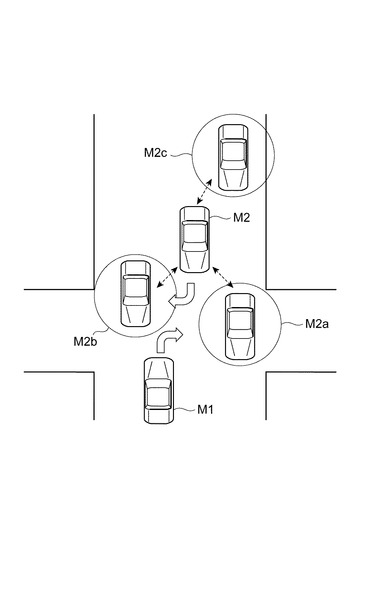
(実施例1) 上述した車両制御システム10を用いて車両制御を行う第1実施例について説明する。この第1実施例においては、図2に示す状況に対応する例を説明する。図2に示す状況では、自車両M1に搭載された車両制御システム10が他車両M2の位置情報を把握し、自車両M1の挙動を制御するものとする。尚、他車両M2にも同様に車両制御システム10が搭載されているものとする。
【0027】
図2においては、自車両M1及び他車両M2共に停止状態にあるものとする。GPSによる測位方法では、GPS衛星の捕捉状況によりある程度の誤差が発生しながら位置情報を取得することになる。従って、他車両M2は実車状態としては停止しているが、位置情報としては、例えばM2a,M2b,M2cの位置にずれて把握される可能性がある。位置M2a,M2bにあると把握されれば、他車両M2は接近中と誤判定される。また、位置M2cにあると把握されれば、他車両M2は後退中と誤判定される。
【0028】
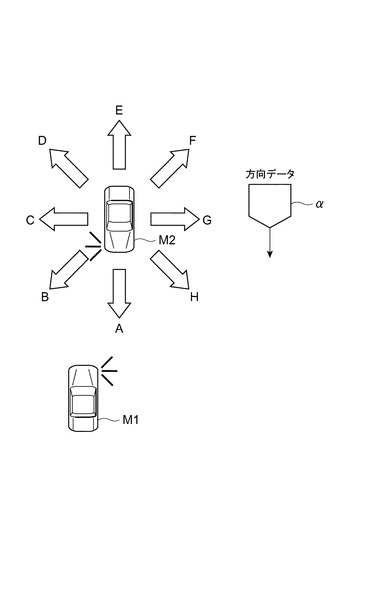
そこで、他車両M2の移動方向情報を取得し、他車M2の実際の位置情報(車両位置情報)の演算に利用するものとする。図3にその演算の基本的な考え方を示す。図3に示すように、他車両M2が進行する方向を示す移動方向情報dを取得する。同時に、GPS測位システムを使って、他車両M2の位置を示すと想定される想定位置情報を時系列に沿って取得する。ここで、移動方向情報dの方向と、想定位置情報の変動方向を比較し、両者が一致する場合には想定位置情報を車両位置情報として扱う。従って、図3の場合には、移動方向情報dと一致する変動方向A以外は停止しているものとして扱う。また、他車両M2が右折しようとしており、ウインカー情報として右折方向に方向指示器を出しているとの情報を受け取った場合には、変動方向A及びB以外は停止しているものとして扱う。
【0029】
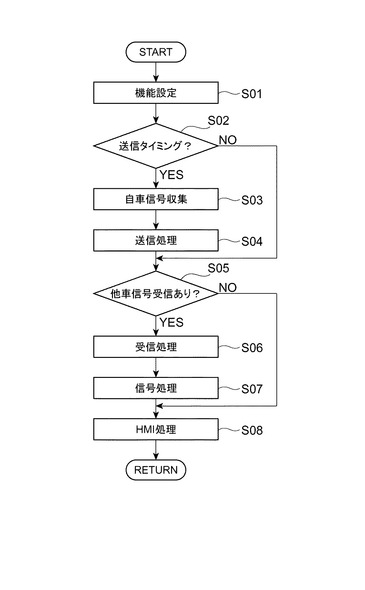
続いて、実施例1における、車両制御システム10の動作について図4を参照しながら説明する。図4は、車両制御システム10の動作のメインループを示している。
【0030】
まず、車両制御システム10の機能設定を行う(ステップS01)。続いて、この車両制御システム10が搭載された車両のデータを送信するタイミングが到来したかを判断する(ステップS02)。
【0031】
ステップS02の判断の結果、送信タイミングが到来していると判断すると、情報処理装置30が、自車両M1の各種センサの出力信号や、GPS信号を収集する(ステップS03)。この収集した自車両M1に係る各種信号は、通信装置20によって他車両M2に送信される(ステップS04)。
【0032】
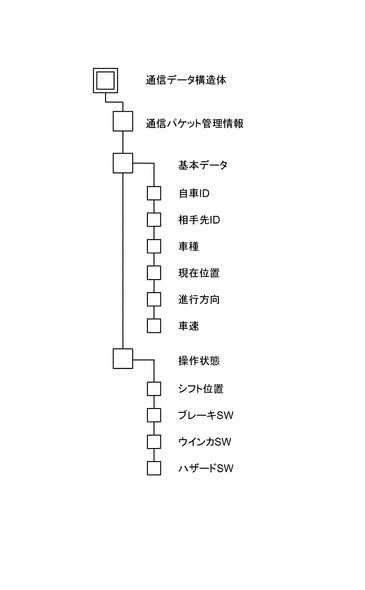
ここで、送信されるデータの構成を図5に示す。このデータは、通信パケット管理情報と、基本データと、操作状態情報と、から構成されている。基本データには、自車ID、相手先ID、車種情報、現在位置情報、車速情報といったデータが含まれている。操作状態情報には、シフト位置情報、ブレーキスイッチ情報、ウインカースイッチ情報、ハザードスイッチ情報といったデータが含まれている。
【0033】
図4に戻り、ステップS02の判断の結果、送信タイミングが到来していないと判断した場合、及びステップS04の処理が終了した場合には、情報処理装置30が、他車両M2から送信される他車両M2に係る各種信号がないか判断する(ステップS05)。
【0034】
ステップS05の判断の結果、送信された他車両M2に係る各種信号がある場合、受信処理を行う(ステップS06)。その後受信した各種信号に基づいて、情報処理装置30が信号処理を行う(ステップS07、詳細は後述する)。
【0035】
ステップS05の判断の結果、送信される他車両M2に係る各種信号がない場合、及びステップS08の処理が終了した場合には、車両制御装置40がHMI制御処理を行う(ステップS08)。
【0036】
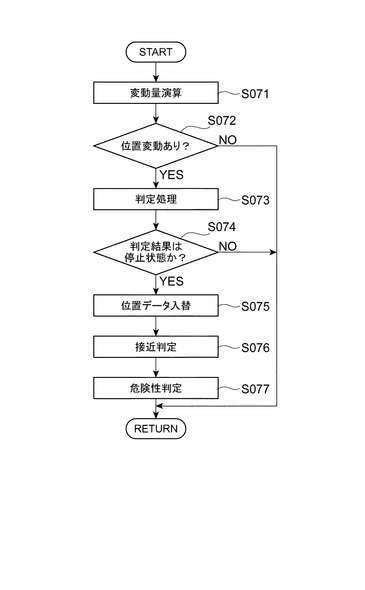
続いて、上記ステップS07の詳細な処理内容について、図6を参照しながら説明する。図6は、図4のメインループ中における信号処理の処理ループを示す図である。
【0037】
まず、情報処理装置30の位置取得部302が、想定位置情報の変動量を演算する(ステップS071)。これは、想定位置情報を時系列的に取得し、その変動量を算出することで演算される。
【0038】
続いて、位置取得部302が、位置変動があったか否かを判断する(ステップS072)。位置変動が無いと判断した場合、すなわち想定位置情報に変動が無かった場合には処理を終了する。一方、位置変動があると判断した場合、すなわち想定位置情報に変動があった場合には、実際に他車両M2が移動しているかを判定する処理を行う(ステップS073、詳細は後述する)。
【0039】
ステップS073の判定の結果に基づいて、実際に他車両M2が移動したか否かを判断する(ステップS074)。ステップS074の判断の結果、実際には他車両M2が移動していないと判断した場合には処理を終了する。一方、ステップS074の判断の結果、実際に他車両M2が移動していると判断した場合には、位置演算部303は、格納している位置情報を更新する(ステップS075)。
【0040】
続いて、車両制御装置40が、更新した他車両M2の位置情報に基づいて、他車両M2が接近しているか判定する(ステップS076)。ステップS076の判定結果に基づいて、自車両M1に危険があるか危険性の判定を行う(ステップS077)。この判定結果に基づいて、図4のHMI処理が行われる。
【0041】
続いて、上記ステップS073における判定方法について、図7,8,9,10,11,12を参照しながら詳細に説明する。図7〜12は、上記ステップS073における判定方法を説明するためのフローチャートである。
【0042】
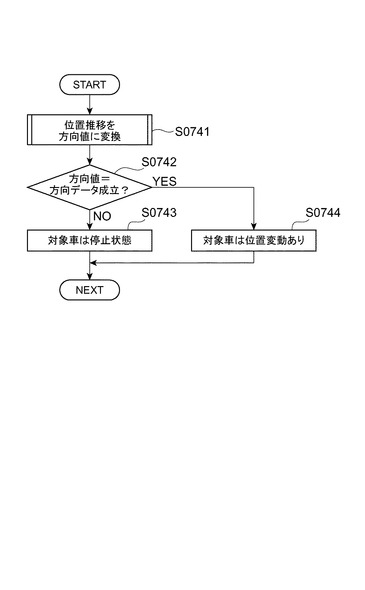
図7に示す例では、方向値と方向データとに基づいて判定している。位置取得部301が、想定位置情報の時系列変化に基づいて、方向値を算出する(ステップS0741)。続いて、位置演算部303が、方向取得部301から出力される移動方向情報(方向データ)と、位置取得部301が算出した方向値とが同じ向きを指し示しているか判断する(ステップS0742)。
【0043】
ステップS0742の判断の結果、同じ向きを指し示していると判断した場合には、位置演算部303は、対象となる車両が移動していると判断する(ステップS0744)。一方、ステップS0742の判断の結果、同じ向きを指し示していないと判断した場合には、位置演算部303は、対象となる車両が移動しておらず停止状態にあると判断する(ステップS0743)。
【0044】
図8に示す例では、方向値及び移動方向情報(方向データ)に更にウインカー情報を加味して判定している。情報処理装置30の位置演算部303では、ウインカースイッチ105から出力されるウインカー情報に基づいて、対象となる車両の判定方向を決定する(ステップS0745)。
【0045】
位置取得部301が、想定位置情報の時系列変化に基づいて、方向値を算出する(ステップS0746)。続いて、位置演算部303が、ステップS0745において決定した判定方向と、位置取得部301が算出した方向値とが同じ向きを指し示しているか判断する(ステップS0747)。
【0046】
ステップS0747の判断の結果、同じ向きを指し示していると判断した場合には、位置演算部303は、対象となる車両が移動していると判断する(ステップS0749)。一方、ステップS0747の判断の結果、同じ向きを指し示していないと判断した場合には、位置演算部303は、対象となる車両が移動しておらず停止状態にあると判断する(ステップS0748)。
【0047】
図9に示す例では、シフトポジションデータに基づいて判定している。情報処理装置30の位置演算部303では、シフトポジションセンサ103から出力されるシフトポジションデータを収集する(ステップS0750)。
【0048】
位置演算部303は、シフトポジションデータがパーキングポジションを示しているかを判断する(ステップS0751)。
【0049】
ステップS0751の判断の結果、シフトポジションデータがパーキングポジションを示していないと判断した場合には、位置演算部303は、対象となる車両が移動していると判断する(ステップS0753)。一方、ステップS0751の判断の結果、シフトポジションデータがパーキングになっていると判断した場合には、位置演算部303は、対象となる車両が移動しておらず停止状態にあると判断する(ステップS0752)。
【0050】
図10に示す例では、移動データから移動速度を算出したデータに基づいて判定している。情報処理装置30の位置演算部303では、想定位置情報の変動量を演算し、その演算結果に基づいて対象となる車両の速度を算出する(ステップS0754)。
【0051】
位置演算部303は、ステップS0754において算出した速度が予め定められた判定車速よりも大きいか判断する(ステップS0755)。
【0052】
ステップS0755の判断の結果、算出した速度が判定車速よりも大きくないと判断した場合には、位置演算部303は、対象となる車両が移動していると判断する(ステップS0757)。一方、ステップS0755の判断の結果、算出した速度が判定車速よりも大きいと判断した場合には、位置演算部303は、対象となる車両が移動しておらず停止状態にあると判断する(ステップS0756)。
【0053】
図11に示す例では、移動後位置の周囲を探索したデータに基づいて判定している。情報処理装置30の位置演算部303では、想定位置情報の変動量に基づいて、移動後の想定位置を算出する。その算出した想定位置において、他の車両が存在しないか、位置取得部302が探索する(ステップS0758)。より具体的には、算出した想定位置から予め定められた判定距離内に他の車両が存在するか探索する。
【0054】
位置演算部303は、ステップS0758の探索の結果に基づいて、車両の移動後の想定位置から所定範囲内に他の車両が存在するか否か判断する(ステップS0759)。
【0055】
ステップS0759の判断の結果、車両の移動後の想定位置から所定範囲内に他の車両が存在しないと判断した場合には、位置演算部303は、対象となる車両が移動していると判断する(ステップS0761)。一方、ステップS0759の判断の結果、車両の移動後の想定位置から所定範囲内に他の車両が存在すると判断した場合には、位置演算部303は、対象となる車両が移動しておらず停止状態にあると判断する(ステップS0760)。
【0056】
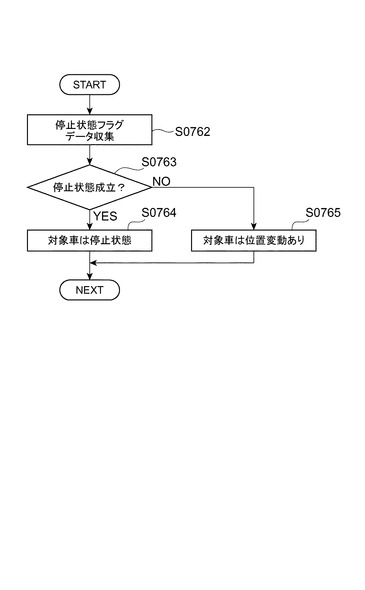
図12に示す例では、停止状態を示すデータに基づいて判定している。情報処理装置30の位置取得部302では、演算対象となる車両の停止状態フラグデータを収集する(ステップS0762)。位置取得部302は、位置演算部303にその停止状態フラグデータを出力する。
【0057】
位置演算部303は、停止状態フラグデータに基づいて、演算対象となる車両の停止状態が成立しているか否か判断する(ステップS0763)。
【0058】
ステップS0763の判断の結果、車両の停止状態が成立していなければ、位置演算部303は、対象となる車両が移動していると判断する(ステップS0765)。一方、ステップS0759の判断の結果、車両の停止状態が成立していれば、位置演算部303は、対象となる車両が移動しておらず停止状態にあると判断する(ステップS0764)。
【0059】
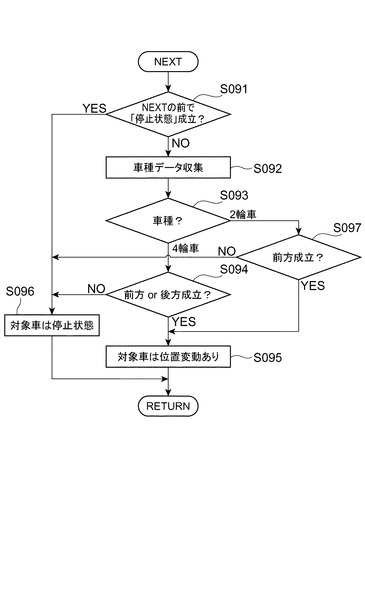
上述した図7〜12に示す例は、各々独立して実施しても、組み合わせて実施してもよい。また、上述した図7〜12に示す例の後に、図13に示す処理を行うことも好ましい。図13は車種による進行方向の判定を行う例である。
【0060】
図7〜12に示す処理における「Next」の前において、演算対象となる車両の停止状態が成立したか否か判断する(ステップS091)。
【0061】
ステップS091において、車両の停止状態が成立していないと判断すると、演算対象となる車両の車種データを収集する(ステップS092)。この収集した車種データに基づいて、演算対象となる車両が2輪車か4輪車かを判断する(ステップS093)。
【0062】
ステップS093の判断の結果、演算対象となる車両が4輪車であると判断すると、ステップS071において演算した想定位置情報の変動量に基づいて、前方又は後方に移動しているか判断する(ステップS094)。これは、4輪車であれば、右折又は左折する以外には前方又は後方にのみ進行すると考えられるからである。
【0063】
ステップS094において、前方又は後方に移動していると判断すると、演算対象となる車両が移動しているとの判断を確定させる(ステップS095)。一方、ステップS094において、前方又は後方に移動していないと判断すると、演算対象となる車両は移動していないとの判断を確定させる(ステップS096)。
【0064】
上記ステップS091において、車両の停止状態が成立していると判断すると、ステップS96の処理を行う。
【0065】
上記ステップS093において、演算対象となる車両が2輪車であると判断すると、ステップS071において演算した想定位置情報の変動量に基づいて、前方に移動しているか判断する(ステップS097)。これは、2輪車であれば、右折又は左折する以外には前方にのみ進行すると考えられるからである。
【0066】
ステップS097において、前方に移動していると判断すると、ステップS096の処理を行う。一方、ステップS097において、前方に移動していないと判断すると、ステップS095の処理を行う。
【0067】
(実施例2) 上述した車両制御システム10を用いて車両制御を行う第2実施例について説明する。この第2実施例においては、車両制御システム10のGPS装置106から出力される想定位置情報の揺らぎや、GPS装置106の起動時における想定位置情報の取得エラーに対応するものである。
【0068】
より具体的に、図14、図15、図16、図17を参照しながら説明する。図14,15は、正常な状態を説明するための図である。図14,15の(a)は、実際の車両の位置関係を示し、図14,15の(b)は、想定位置情報の動きを示し、図14,15の(c)は、想定位置情報の変動から得られる方向データを示している。
【0069】
一方、図16,17は、非正常な状態を説明するための図である。図16,17の(a)は、実際の車両の位置関係を示し、図16,17の(b)は、想定位置情報の動きを示し、図16,17の(c)は、想定位置情報の変動から得られる方向データを示している。
【0070】
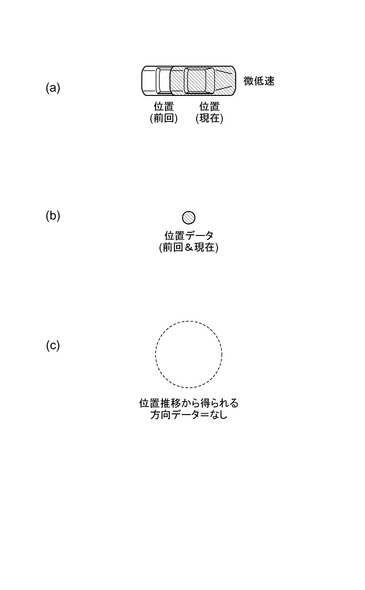
図16は、実際の車両が微低速で移動している場合を示している。図16の(a)に示すように、実際の車両は微低速で移動している。しかしながら、図16の(b)に示すように、GPSによって得られる想定位置情報は変動していない。従って、図16の(c)に示すように、想定位置情報の変動から得られる方向データは無い。図16に示すような状態となるのは、GPS装置が取得する想定位置情報を更新していないためである。例えば、GPS装置の起動直後といった場面が想定される。
【0071】
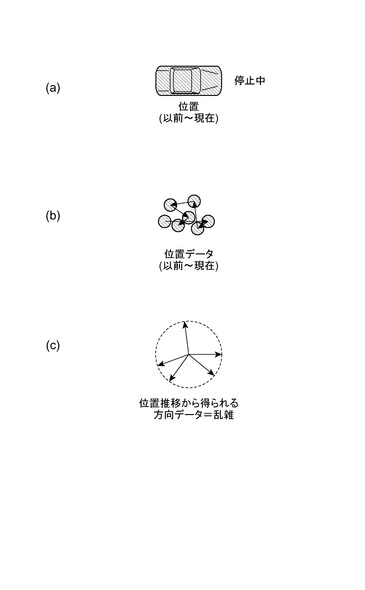
図17は、実際の車両が停止している場合を示している。図17の(a)に示すように、実際の車両は停止している。しかしながら、図17の(b)に示すように、GPSによって得られる想定位置情報は乱雑に変動している。従って、図17の(c)に示すように、想定位置情報の変動から得られる方向データは乱雑なものとなっている。
【0072】
図17に示すような状態となるのは、GPSの特性によるものである。GPSは理論上、位置算出毎に若干の誤差を生じる。従って、車両が停止している場合であっても、図17に示すような想定位置情報が取得される場合がある。
【0073】
第2実施例はこれらの場合において、より的確な車両の位置を把握するためのものである。第2実施例における処理手順のメインループは、第1実施例と同様であり、既に図4を参照しながら説明したのでその説明を省略する。図18は、図4のメインループ中における信号処理の処理ループを示す図である。
【0074】
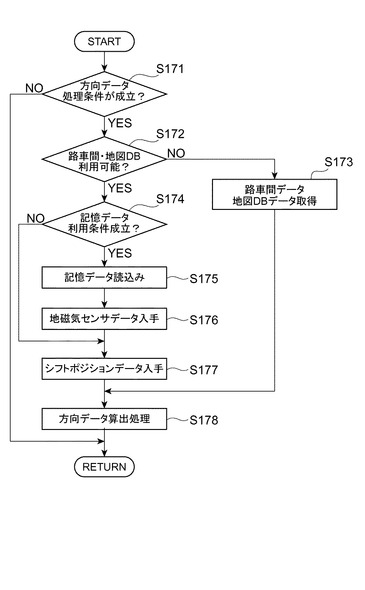
まず、情報処理装置30の位置演算部303が、方向データ処理条件が成立するか判断する(ステップS171)。方向データ処理条件が成立しなければ処理を終了する。方向データ処理条件が成立すれば、後述する処理を行う。
【0075】
続いて、路車間通信データ又は地図データベースデータが利用可能か判断する(ステップS172)。利用可能であれば、通信装置20を経由して路車間通信データを取得し、又は地図情報格納部151から地図データベースデータを取得する(ステップS173)。路車間通信データ又は地図データベースデータを取得すると、後述するステップS178の処理を行う。
【0076】
ステップS172の判断の結果、路車間通信データ又は地図データベースデータが利用可能でない場合、記憶データ利用条件が成立するか判断する(ステップS174)。ここで、記憶データとは、記憶されている方向データのことである。
【0077】
ステップS174の判断の結果、記憶データ利用条件が成立すれば、記憶されている方向データを読み込む(ステップS175)。その後、地磁気センサ104から地磁気センサデータを取得する(ステップS176)。
【0078】
ステップS174の判断結果、記憶データ利用条件が成立しない場合、又はステップS176の処理の後、シフトポジションセンサ103からシフトポジションデータを取得する(ステップS177)。
【0079】
上述したステップS173、ステップS175、ステップS176、及びステップS177で取得した各種データに基づいて、方向データ算出処理を行う(ステップS178)。方向データ算出処理の詳細については後述する。
【0080】
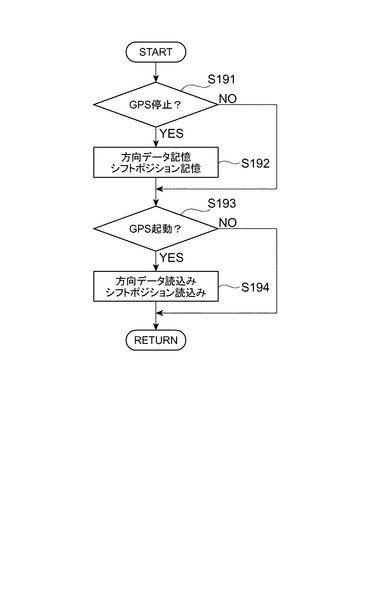
方向データ及びシフトポジションデータの取扱いについて、図19を参照しながら説明する。GPS装置106が停止されるか判断する(ステップS191)。GPS装置106が停止する場合には、方向データ及びシフトポジションデータは、それぞれの最後のデータが記憶される(ステップS192)。その後、GPS装置106が起動されるか判断する(ステップS193)。GPS装置106が起動すると、これら読み込まれて記憶されている方向データ及びシフトポジションデータが読み出される(ステップS194)。
【0081】
シフトポジションデータは、Pポジション又はNポジション以外の走行可能なシフトポジションデータが有効なデータとして取り扱われる。例えば、DポジションやRポジションのデータである。尚、前方走行可能なシフトポジション(1,2,B,S等)は、Dポジションとして取り扱う。
【0082】
尚、車速が0となる直前のシフトポジションデータを有効なものとして記憶する。車速が0となった後に、DポジションからRポジション又はRポジションからDポジションに変更されても、車速が0より大きくならない限りそれらのシフトポジションデータは無効なものとして取り扱う。
【0083】
尚、車両が停止する速度付近で、走行可能なシフトポジションが、異なる走行可能なシフトポジションに変更された場合には、方向データを180°反転して用いる。
【0084】
引き続いて、ステップS178の方向データ算出処理について、具体例を挙げながら説明する。まず、GPS装置106を起動した直後の処理について説明する。
【0085】
起動直後の地磁気センサデータと記憶している方向データとを比較する。また、記憶されているシフトポジションデータと、新に選択されたシフトポジションデータとを比較する。
【0086】
ここで、記憶されているシフトポジションデータがDポジションである場合には、まず、地磁気センサデータと記憶している方向データとを比較する。これらのデータの差分が規定範囲内であれば、記憶している方向データを読み出して、その後の方向データの暫定値として用いる。一方、これらのデータの差分が規定範囲内でなければ、地磁気センサデータの値を、その後の方向データの暫定値として用いる。
【0087】
続いて、新たに選択された走行可能なシフトポジションが、Dポジション相当である場合には、上述した方向データの暫定値を起動時の方向データとして用いる。一方、新たに選択された走行可能なシフトポジションが、Rポジション相当である場合には、上述した方向データの暫定値を180°反転してGPS起動時の方向データとして用いる。
【0088】
一方、記憶されているシフトポジションデータがRポジションである場合には、まず、地磁気センサデータと記憶している方向データを180°反転した値とを比較する。これらのデータの差分が規定範囲内であれば、記憶している方向データを読み出して、その後の方向データの暫定値として用いる。一方、これらのデータの差分が規定範囲内でなければ、地磁気センサデータの値を、その後の方向データの暫定値として用いる。
【0089】
続いて、新たに選択された走行可能なシフトポジションが、Rポジション相当である場合には、上述した方向データの暫定値を起動時の方向データとして用いる。一方、新たに選択された走行可能なシフトポジションが、Dポジション相当である場合には、上述した方向データの暫定値を180°反転してGPS起動時の方向データとして用いる。
【0090】
上述したGPS起動時の方向データは、GPS起動後に得られる方向データとでマージを行う。より具体的には、車速が0より大きくなり、GPS起動時の方向データとGPS起動後に得られる方向データとの乖離が規定値以下であるかが判定される。この条件を満たせば、以降の方向データは、GPS起動後に得られる想定位置情報の変動に基づく方向データを用いる。一方、この条件を満たさない場合は、以降の方向データはGPS起動時の方向データのまま用いる。
【0091】
より具体的に、図20、図21、図22、図23、図24を参照しながら説明する。図20〜22において、それぞれの(a)は実際の車両の位置関係を示し、それぞれの(b)は想定位置情報の動きを示し、それぞれの(c)は使用する方向データを示している。また、図23〜24において、それぞれの(a)は実際の車両の位置関係を示し、それぞれの(b)は想定位置情報の動きを示し、それぞれの(c)は地磁気センサの値を示し、それぞれの(d)は使用する方向データを示している。
【0092】
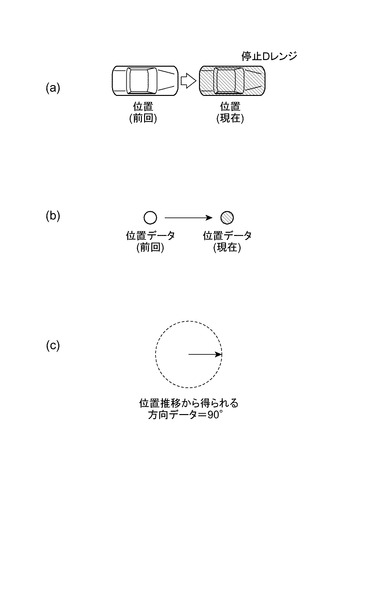
図20は、停止直前の状態を示す図である。図20に示す例に拠れば、想定位置情報の遷移から得られる方向データは、90°(図中上下方向に伸びる線を基準、以下同じ)となり、この方向データが保持される。
【0093】
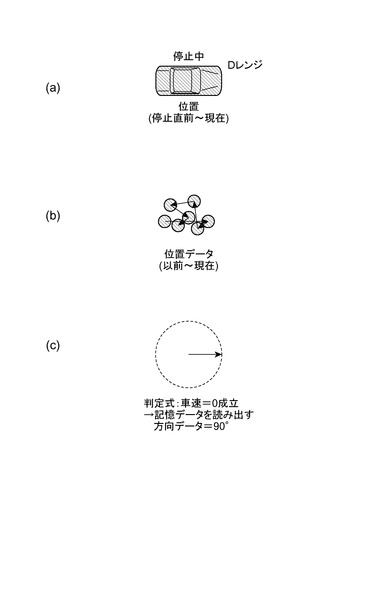
続いて、図21は停止時の状態を示す図である。図21に示すように、停止時には想定位置情報が揺らいでしまうが、車速が0であるので、保持されている方向データ(90°)を読み出して使用する。
【0094】
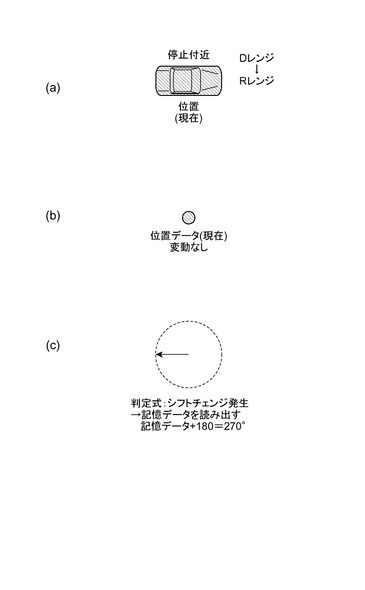
続いて、図22はシフトチェンジ時の状態を示す図である。図22に示すように停止付近でシフトチェンジを行っても想定位置情報に変動は生じないが、実際には進行する方向が反転しているので、保持されている方向データ(90°)を反転させて270°として用いる。
【0095】
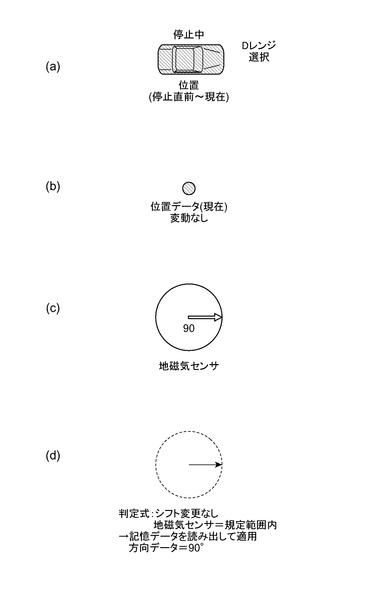
続いて、図23はGPS起動時の状態を示す図である。図23に示す例では、シフトポジションの変更がなく、地磁気センサデータと記憶している方向データの値とが同じであるので、記憶している方向データ(90°)を読み出して使用する。
【0096】
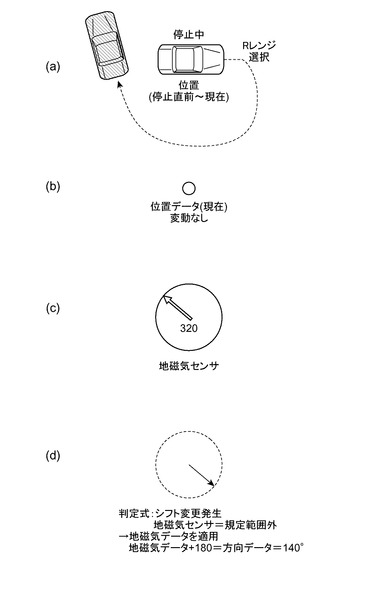
続いて、図24はGPS起動時の状態を示す別の例を示した図である。図24に示す例では、シフトポジションが変更されており、地磁気センサデータ(320°)と記憶している方向データの値とが規定範囲内にないので、地磁気センサデータを用いると共に、そのデータを反転させて140°として用いる。
【0097】
続いて、車両停止時の方向データが乱雑になる場合の処理について説明する。この対策としては、対象となる車両の車速が0である場合には、想定位置情報や方向データが更新されても、更新前(すなわち、車速が0出ない場合)の値を用いる。
【0098】
また、路車間通信データが利用可能である場合には、例えば信号機情報が赤信号であるとの情報であれば、信号待ち停止中であると判断して、想定位置情報や方向データが更新されても、更新前(すなわち、車速が0でない場合)の値を用いる。
【0099】
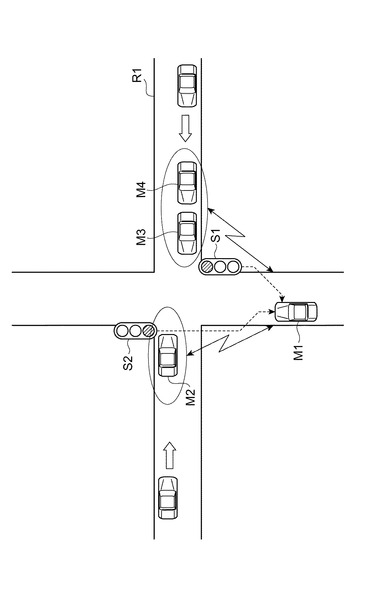
より具体的に図25を参照しながら説明する。図25に示すように、停止中の他車両M2,M3,M4が交差点付近に存在するか否かを判定し、交差点付近に存在すればそれら他車両M2,M3,M4が属する道路リンクR1の信号機S1,S2に関する信号機情報を得る。その信号機情報が、赤信号であることを示す場合、他車両M2,M3,M4が信号待ちであると判断する。従って、車速が0で、信号機が赤信号であるとの条件を満たす場合、他車両M2,M3,M4から想定位置情報等の更新があっても、他車両M2,M3,M4の停止直前の位置及び方向を示すデータをそのまま用いる。
【0100】
また、路車間通信データや地図データベースデータが利用可能である場合には、例えば、対象となる車両の道路リンクの属性方位(方角)を方向データとして用いることも可能である。より具体的には、対象となる車両の最短距離ノードを探索し、道路リンクを抽出する。この際、上下線の分離等も判定し、抽出する。続いて、対象となる車両が属する道路リンクの地図データベースデータを抽出する。この道路リンクが自動車専用道路である場合には、許容する属性方位(方角)を抽出する。ここで、車速が0である場合には渋滞等による停止であると判断し、対象となる車両から想定位置情報等の更新があっても、他車両の停止直前の位置を示すデータをそのまま用いる。また、方向としては上述した属性方位(方角)を用いる。
【0101】
尚、本実施形態では、地磁気センサを用いているが、GPS起動直後の比較用としてのみ用いることで、車両や建物による影響を極力排除している。
【0102】
対象となる車両が2輪車の場合には、上述したDポジションのみを想定した処理のみで対応可能である。
【図面の簡単な説明】
【0103】
【図1】本発明の実施形態である車両制御システムの構成を示す図である。
【図2】図1に示す車両制御システムが適用される状況を説明するための図である。
【図3】図1に示す車両制御システムが適用される状況を説明するための図である。
【図4】図1に示す車両制御システムにおける処理のメインループを示すフローチャートである。
【図5】図1に示す車両制御システムが送受信するデータ構成を示す図である。
【図6】図4に示すメインループの信号処理をより具体的に説明するためのフローチャートである。
【図7】図6における停止判定をより具体的に説明するためのフローチャートである。
【図8】図6における停止判定をより具体的に説明するためのフローチャートである。
【図9】図6における停止判定をより具体的に説明するためのフローチャートである。
【図10】図6における停止判定をより具体的に説明するためのフローチャートである。
【図11】図6における停止判定をより具体的に説明するためのフローチャートである。
【図12】図6における停止判定をより具体的に説明するためのフローチャートである。
【図13】車種による進行方向の判定を行う手順を示したフローチャートである。
【図14】車両の実際の位置と想定位置情報との関係を説明するための図である。
【図15】車両の実際の位置と想定位置情報との関係を説明するための図である。
【図16】車両の実際の位置と想定位置情報との関係を説明するための図である。
【図17】車両の実際の位置と想定位置情報との関係を説明するための図である。
【図18】図4に示すメインループの信号処理をより具体的に説明するためのフローチャートである。
【図19】方向データ及びシフトポジションデータの取扱いについて説明するためのフローチャートである。
【図20】車両の実際の位置と想定位置情報との関係を説明するための図である。
【図21】車両の実際の位置と想定位置情報との関係を説明するための図である。
【図22】車両の実際の位置と想定位置情報との関係を説明するための図である。
【図23】車両の実際の位置と想定位置情報との関係を説明するための図である。
【図24】車両の実際の位置と想定位置情報との関係を説明するための図である。
【図25】車両の位置と道路情報との関係を説明するための図である。
【符号の説明】
【0104】
10…車両制御システム、20…通信装置、30…情報処理装置、40…車両制御装置、101…アンテナ、102…車速センサ、103…シフトポジションセンサ、104…地磁気センサ、105…ウインカースイッチ、106…GPS装置、151…地図情報格納部、201…送信部、202…受信部、301…方向取得部、302…位置取得部、303…位置演算部。
【技術分野】
【0001】
本発明は、車両位置演算装置に関する。
【背景技術】
【0002】
通信技術の発展に伴い、いわゆる車車間通信を利用した交通制御システムが提案されている(例えば、下記特許文献1参照)。下記特許文献1に記載されている交通制御システムは、車車間通信によって車両に関する様々な情報を交換している。その交換する情報にあって、車両の位置情報はナビゲーションシステムを利用して取得している。
【特許文献1】特開平11−110693号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
ナビゲーションシステムによる位置情報の取得は、主にGPS(Global Positioning System)を利用するのが一般的である。GPSは位置情報の取得手段としては一般的であるが、その性質上、常に小刻みな位置変動を繰り返しており、例えば車両が停止していても位置情報は小刻みに変動している。また、GPSはGPS衛星の捕捉状況等によりある程度の誤差の発生は避けられない。従って、GPSによって取得した位置情報を用いて何らかの車両制御を行おうとすると、GPSの誤差によって必ずしも的確な車両制御が行えない場合も想定される。
【0004】
そこで本発明では、GPSといった無線通信手段を利用した場合であっても、車両の位置情報を的確に把握可能な車両位置演算装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明に係る車両位置演算装置は、車両の位置を示す車両位置情報を演算する車両位置演算装置であって、車両が移動する移動方向を示す移動方向情報を取得する方向取得手段と、車両外の無線通信手段との間における無線通信結果に基づいて、車両の位置を示すと想定される想定位置情報を時系列に沿って取得する位置取得手段と、移動方向情報が示す移動方向と、想定位置情報の変動方向とに基づいて、車両の位置を示す車両位置情報を算出する位置演算手段と、を備える。
【0006】
本発明に係る車両位置演算装置によれば、演算対象となる車両の移動方向と、例えばGPSといった無線通信手段によって得られる想定位置情報の変動方向とに基づいて、車両位置情報を算出するので、車両の移動方向とは異なる方向の変動を排除することができ、車両位置情報をより的確に把握することができる。
【0007】
また本発明に係る車両位置演算装置では、位置演算手段は、移動方向情報が示す移動方向と、想定位置情報の変動方向とを比較し、それらが指し示す向きが一致しない場合は車両は停止していると判断して車両位置情報を算出することも好ましい。
【0008】
また本発明に係る車両位置演算装置では、無線通信手段との間における無線通信を行う通信手段を備え、当該通信手段がその機能を停止した場合に、方向取得手段は、通信手段が停止する直前に取得した想定位置情報の変動方向を移動方向とみなし、移動方向情報として取得することも好ましい。
【0009】
また本発明に係る車両位置演算装置では、当該車両位置演算装置が演算対象とする車両は、当該車両位置演算装置が搭載される車両とは別の他車両であって、移動方向情報及び想定位置情報は他車両から送信されるものであることも好ましい。
【0010】
また本発明に係る車両位置演算装置では、移動方向情報は、車両の方向指示器が指し示す方向を特定するウインカー情報を含むことも好ましい。
【発明の効果】
【0011】
本発明によれば、車両の移動方向とは異なる方向の変動を排除することができ、車両位置情報をより的確に把握することができる。
【発明を実施するための最良の形態】
【0012】
以下、添付図面を参照しながら本発明の好適な実施の形態について説明する。説明の理解を容易にするため、各図面において同一の構成要素に対しては可能な限り同一の符号を付して、重複する説明は省略する。
【0013】
本発明の実施形態である車両制御システムについて図1を参照しながら説明する。図1は車両制御システム10(車両位置演算装置)の構成を示す図である。車両制御システム10は、通信装置20と、情報処理装置30と、車両制御装置40とを備えている。車両制御システム10は更に、アンテナ101と、車速センサ102と、シフトポジションセンサ104と、地磁気センサ105と、ウインカースイッチ106と、GPS装置107(通信手段)と、地図情報格納部151とを備えている。車速センサ102、シフトポジションセンサ103、地磁気センサ104、ウインカースイッチ105、及びGPS装置106は、この車両制御システム10が搭載される車両の自車信号を収集するためのセンサ、スイッチ、及び装置である。引き続いて各構成要素について説明する。
【0014】
車速センサ102は、車両制御装置10が搭載される車両の速度を検出するためのセンサであって、その検出した速度を示す信号(情報)を情報処理装置30に出力する。シフトポジションセンサ103は、車両制御装置10が搭載される車両のシフトポジションを検出するためのセンサであって、その検出したシフトポジションを示す信号(情報)を情報処理装置30に出力する。
【0015】
地磁気センサ104は、地磁気を検出することで、車両制御装置10が搭載される車両の向いている方角を示す信号(情報)を情報処理装置30に出力する。ウインカースイッチ105は、車両制御装置10が搭載される車両の方向指示器(ウインカー)のスイッチであって、その指し示す方向を示す信号(情報)を情報処理装置30に出力する。
【0016】
GPS装置106は、車両制御装置10が搭載される車両外のGPS衛星(無線通信手段)との間における無線通信結果に基づいて、その車両の位置を示すと想定される想定位置情報を取得する装置である。GPS装置106は、この取得した想定位置情報を順次情報処理装置301に出力する。従って、情報処理装置30は、想定位置情報を時系列に沿って取得することができる。地図情報格納部151は、地図情報を格納する部分である。この地図情報には、道路に関する情報が含まれている。
【0017】
通信装置20は、アンテナ101を介して他の車両と車車間通信を行うための通信装置である。通信装置20は、受信部201と、送信部202とを有している。受信部201は、他の車両から送信される信号(情報)を受信し、情報処理装置30に出力する部分である。送信部202は、情報処理装置30から出力される信号(情報)を、他の車両に送信する部分である。
【0018】
情報処理装置30は、車両制御装置40が所定の制御処理を行うために必要となる自車両の位置を示す車両位置情報及び他車両の位置を示す車両位置情報をそれぞれ算出する装置である。
【0019】
情報処理装置30は、物理的には、CPUやRAM、ROMを含むコンピュータである。情報処理装置30は、機能的な構成要素として、方向取得部301(方向取得手段)と、位置取得部302(位置取得手段)と、位置演算部303(位置演算手段)とを備えている。
【0020】
方向取得部301は、車両が移動する移動方向を示す移動方向情報を取得する部分である。方向取得部301は、この車両制御装置40が搭載されている車両の移動方向に加えて、他車両の移動方向も取得する部分である。方向取得部301による移動方向取得の詳細については後述する。方向取得部301は、取得した移動方向情報を位置演算部303に出力する。
【0021】
また、方向取得部301は、GPS装置106がその機能を停止した場合に、GPS装置106が停止する直前に取得した想定位置情報の変動方向を移動方向とみなし、移動方向情報として取得する。
【0022】
位置取得部302は、車両外の無線通信手段との間における無線通信結果に基づいて、車両の位置を示すと想定される想定位置情報を時系列に沿って取得する部分である。本実施形態の場合、車両制御装置40のGPS装置106とGPS衛星との無線通信結果に基づいて想定位置情報を取得している。また、位置取得部302は、他車両から送信される情報に基づいて、他車両の位置を示すと想定される想定位置情報を時系列に沿って取得する。位置取得部302は、取得したこれらの想定位置情報を位置演算部303に出力する。
【0023】
位置演算部303は、方向取得部301から出力される移動方向情報が示す移動方向と、位置取得部302から出力される想定位置情報の変動方向とに基づいて、自車両又は他車両の位置を示す車両位置情報を算出する部分である。
【0024】
より具体的には、位置演算部303は、移動方向情報が示す移動方向と、想定位置情報の変動方向とを比較し、それらが指し示す向きが一致しない場合は対象となる車両は停止していると判断して車両位置情報を算出する。位置演算部303は、算出した車両位置情報を車両制御装置40及び通信装置20に出力する。
【0025】
車両制御装置40は、情報処理装置30から出力される自車両及び他車両の車両位置情報に基づいて、この車両制御装置10が搭載されている車両のHMI(Human Machine Interface)制御を行う装置である。
【0026】
(実施例1) 上述した車両制御システム10を用いて車両制御を行う第1実施例について説明する。この第1実施例においては、図2に示す状況に対応する例を説明する。図2に示す状況では、自車両M1に搭載された車両制御システム10が他車両M2の位置情報を把握し、自車両M1の挙動を制御するものとする。尚、他車両M2にも同様に車両制御システム10が搭載されているものとする。
【0027】
図2においては、自車両M1及び他車両M2共に停止状態にあるものとする。GPSによる測位方法では、GPS衛星の捕捉状況によりある程度の誤差が発生しながら位置情報を取得することになる。従って、他車両M2は実車状態としては停止しているが、位置情報としては、例えばM2a,M2b,M2cの位置にずれて把握される可能性がある。位置M2a,M2bにあると把握されれば、他車両M2は接近中と誤判定される。また、位置M2cにあると把握されれば、他車両M2は後退中と誤判定される。
【0028】
そこで、他車両M2の移動方向情報を取得し、他車M2の実際の位置情報(車両位置情報)の演算に利用するものとする。図3にその演算の基本的な考え方を示す。図3に示すように、他車両M2が進行する方向を示す移動方向情報dを取得する。同時に、GPS測位システムを使って、他車両M2の位置を示すと想定される想定位置情報を時系列に沿って取得する。ここで、移動方向情報dの方向と、想定位置情報の変動方向を比較し、両者が一致する場合には想定位置情報を車両位置情報として扱う。従って、図3の場合には、移動方向情報dと一致する変動方向A以外は停止しているものとして扱う。また、他車両M2が右折しようとしており、ウインカー情報として右折方向に方向指示器を出しているとの情報を受け取った場合には、変動方向A及びB以外は停止しているものとして扱う。
【0029】
続いて、実施例1における、車両制御システム10の動作について図4を参照しながら説明する。図4は、車両制御システム10の動作のメインループを示している。
【0030】
まず、車両制御システム10の機能設定を行う(ステップS01)。続いて、この車両制御システム10が搭載された車両のデータを送信するタイミングが到来したかを判断する(ステップS02)。
【0031】
ステップS02の判断の結果、送信タイミングが到来していると判断すると、情報処理装置30が、自車両M1の各種センサの出力信号や、GPS信号を収集する(ステップS03)。この収集した自車両M1に係る各種信号は、通信装置20によって他車両M2に送信される(ステップS04)。
【0032】
ここで、送信されるデータの構成を図5に示す。このデータは、通信パケット管理情報と、基本データと、操作状態情報と、から構成されている。基本データには、自車ID、相手先ID、車種情報、現在位置情報、車速情報といったデータが含まれている。操作状態情報には、シフト位置情報、ブレーキスイッチ情報、ウインカースイッチ情報、ハザードスイッチ情報といったデータが含まれている。
【0033】
図4に戻り、ステップS02の判断の結果、送信タイミングが到来していないと判断した場合、及びステップS04の処理が終了した場合には、情報処理装置30が、他車両M2から送信される他車両M2に係る各種信号がないか判断する(ステップS05)。
【0034】
ステップS05の判断の結果、送信された他車両M2に係る各種信号がある場合、受信処理を行う(ステップS06)。その後受信した各種信号に基づいて、情報処理装置30が信号処理を行う(ステップS07、詳細は後述する)。
【0035】
ステップS05の判断の結果、送信される他車両M2に係る各種信号がない場合、及びステップS08の処理が終了した場合には、車両制御装置40がHMI制御処理を行う(ステップS08)。
【0036】
続いて、上記ステップS07の詳細な処理内容について、図6を参照しながら説明する。図6は、図4のメインループ中における信号処理の処理ループを示す図である。
【0037】
まず、情報処理装置30の位置取得部302が、想定位置情報の変動量を演算する(ステップS071)。これは、想定位置情報を時系列的に取得し、その変動量を算出することで演算される。
【0038】
続いて、位置取得部302が、位置変動があったか否かを判断する(ステップS072)。位置変動が無いと判断した場合、すなわち想定位置情報に変動が無かった場合には処理を終了する。一方、位置変動があると判断した場合、すなわち想定位置情報に変動があった場合には、実際に他車両M2が移動しているかを判定する処理を行う(ステップS073、詳細は後述する)。
【0039】
ステップS073の判定の結果に基づいて、実際に他車両M2が移動したか否かを判断する(ステップS074)。ステップS074の判断の結果、実際には他車両M2が移動していないと判断した場合には処理を終了する。一方、ステップS074の判断の結果、実際に他車両M2が移動していると判断した場合には、位置演算部303は、格納している位置情報を更新する(ステップS075)。
【0040】
続いて、車両制御装置40が、更新した他車両M2の位置情報に基づいて、他車両M2が接近しているか判定する(ステップS076)。ステップS076の判定結果に基づいて、自車両M1に危険があるか危険性の判定を行う(ステップS077)。この判定結果に基づいて、図4のHMI処理が行われる。
【0041】
続いて、上記ステップS073における判定方法について、図7,8,9,10,11,12を参照しながら詳細に説明する。図7〜12は、上記ステップS073における判定方法を説明するためのフローチャートである。
【0042】
図7に示す例では、方向値と方向データとに基づいて判定している。位置取得部301が、想定位置情報の時系列変化に基づいて、方向値を算出する(ステップS0741)。続いて、位置演算部303が、方向取得部301から出力される移動方向情報(方向データ)と、位置取得部301が算出した方向値とが同じ向きを指し示しているか判断する(ステップS0742)。
【0043】
ステップS0742の判断の結果、同じ向きを指し示していると判断した場合には、位置演算部303は、対象となる車両が移動していると判断する(ステップS0744)。一方、ステップS0742の判断の結果、同じ向きを指し示していないと判断した場合には、位置演算部303は、対象となる車両が移動しておらず停止状態にあると判断する(ステップS0743)。
【0044】
図8に示す例では、方向値及び移動方向情報(方向データ)に更にウインカー情報を加味して判定している。情報処理装置30の位置演算部303では、ウインカースイッチ105から出力されるウインカー情報に基づいて、対象となる車両の判定方向を決定する(ステップS0745)。
【0045】
位置取得部301が、想定位置情報の時系列変化に基づいて、方向値を算出する(ステップS0746)。続いて、位置演算部303が、ステップS0745において決定した判定方向と、位置取得部301が算出した方向値とが同じ向きを指し示しているか判断する(ステップS0747)。
【0046】
ステップS0747の判断の結果、同じ向きを指し示していると判断した場合には、位置演算部303は、対象となる車両が移動していると判断する(ステップS0749)。一方、ステップS0747の判断の結果、同じ向きを指し示していないと判断した場合には、位置演算部303は、対象となる車両が移動しておらず停止状態にあると判断する(ステップS0748)。
【0047】
図9に示す例では、シフトポジションデータに基づいて判定している。情報処理装置30の位置演算部303では、シフトポジションセンサ103から出力されるシフトポジションデータを収集する(ステップS0750)。
【0048】
位置演算部303は、シフトポジションデータがパーキングポジションを示しているかを判断する(ステップS0751)。
【0049】
ステップS0751の判断の結果、シフトポジションデータがパーキングポジションを示していないと判断した場合には、位置演算部303は、対象となる車両が移動していると判断する(ステップS0753)。一方、ステップS0751の判断の結果、シフトポジションデータがパーキングになっていると判断した場合には、位置演算部303は、対象となる車両が移動しておらず停止状態にあると判断する(ステップS0752)。
【0050】
図10に示す例では、移動データから移動速度を算出したデータに基づいて判定している。情報処理装置30の位置演算部303では、想定位置情報の変動量を演算し、その演算結果に基づいて対象となる車両の速度を算出する(ステップS0754)。
【0051】
位置演算部303は、ステップS0754において算出した速度が予め定められた判定車速よりも大きいか判断する(ステップS0755)。
【0052】
ステップS0755の判断の結果、算出した速度が判定車速よりも大きくないと判断した場合には、位置演算部303は、対象となる車両が移動していると判断する(ステップS0757)。一方、ステップS0755の判断の結果、算出した速度が判定車速よりも大きいと判断した場合には、位置演算部303は、対象となる車両が移動しておらず停止状態にあると判断する(ステップS0756)。
【0053】
図11に示す例では、移動後位置の周囲を探索したデータに基づいて判定している。情報処理装置30の位置演算部303では、想定位置情報の変動量に基づいて、移動後の想定位置を算出する。その算出した想定位置において、他の車両が存在しないか、位置取得部302が探索する(ステップS0758)。より具体的には、算出した想定位置から予め定められた判定距離内に他の車両が存在するか探索する。
【0054】
位置演算部303は、ステップS0758の探索の結果に基づいて、車両の移動後の想定位置から所定範囲内に他の車両が存在するか否か判断する(ステップS0759)。
【0055】
ステップS0759の判断の結果、車両の移動後の想定位置から所定範囲内に他の車両が存在しないと判断した場合には、位置演算部303は、対象となる車両が移動していると判断する(ステップS0761)。一方、ステップS0759の判断の結果、車両の移動後の想定位置から所定範囲内に他の車両が存在すると判断した場合には、位置演算部303は、対象となる車両が移動しておらず停止状態にあると判断する(ステップS0760)。
【0056】
図12に示す例では、停止状態を示すデータに基づいて判定している。情報処理装置30の位置取得部302では、演算対象となる車両の停止状態フラグデータを収集する(ステップS0762)。位置取得部302は、位置演算部303にその停止状態フラグデータを出力する。
【0057】
位置演算部303は、停止状態フラグデータに基づいて、演算対象となる車両の停止状態が成立しているか否か判断する(ステップS0763)。
【0058】
ステップS0763の判断の結果、車両の停止状態が成立していなければ、位置演算部303は、対象となる車両が移動していると判断する(ステップS0765)。一方、ステップS0759の判断の結果、車両の停止状態が成立していれば、位置演算部303は、対象となる車両が移動しておらず停止状態にあると判断する(ステップS0764)。
【0059】
上述した図7〜12に示す例は、各々独立して実施しても、組み合わせて実施してもよい。また、上述した図7〜12に示す例の後に、図13に示す処理を行うことも好ましい。図13は車種による進行方向の判定を行う例である。
【0060】
図7〜12に示す処理における「Next」の前において、演算対象となる車両の停止状態が成立したか否か判断する(ステップS091)。
【0061】
ステップS091において、車両の停止状態が成立していないと判断すると、演算対象となる車両の車種データを収集する(ステップS092)。この収集した車種データに基づいて、演算対象となる車両が2輪車か4輪車かを判断する(ステップS093)。
【0062】
ステップS093の判断の結果、演算対象となる車両が4輪車であると判断すると、ステップS071において演算した想定位置情報の変動量に基づいて、前方又は後方に移動しているか判断する(ステップS094)。これは、4輪車であれば、右折又は左折する以外には前方又は後方にのみ進行すると考えられるからである。
【0063】
ステップS094において、前方又は後方に移動していると判断すると、演算対象となる車両が移動しているとの判断を確定させる(ステップS095)。一方、ステップS094において、前方又は後方に移動していないと判断すると、演算対象となる車両は移動していないとの判断を確定させる(ステップS096)。
【0064】
上記ステップS091において、車両の停止状態が成立していると判断すると、ステップS96の処理を行う。
【0065】
上記ステップS093において、演算対象となる車両が2輪車であると判断すると、ステップS071において演算した想定位置情報の変動量に基づいて、前方に移動しているか判断する(ステップS097)。これは、2輪車であれば、右折又は左折する以外には前方にのみ進行すると考えられるからである。
【0066】
ステップS097において、前方に移動していると判断すると、ステップS096の処理を行う。一方、ステップS097において、前方に移動していないと判断すると、ステップS095の処理を行う。
【0067】
(実施例2) 上述した車両制御システム10を用いて車両制御を行う第2実施例について説明する。この第2実施例においては、車両制御システム10のGPS装置106から出力される想定位置情報の揺らぎや、GPS装置106の起動時における想定位置情報の取得エラーに対応するものである。
【0068】
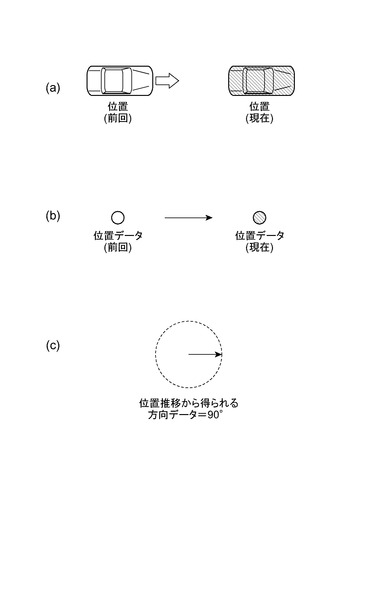
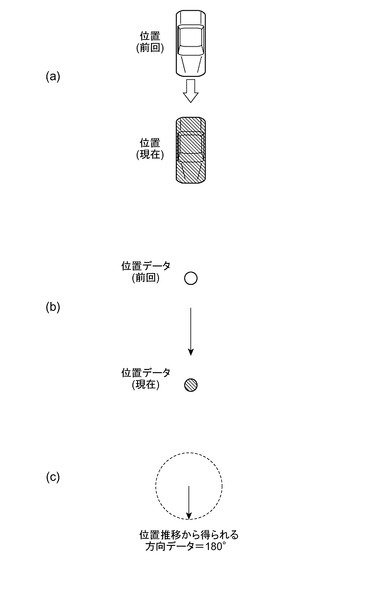
より具体的に、図14、図15、図16、図17を参照しながら説明する。図14,15は、正常な状態を説明するための図である。図14,15の(a)は、実際の車両の位置関係を示し、図14,15の(b)は、想定位置情報の動きを示し、図14,15の(c)は、想定位置情報の変動から得られる方向データを示している。
【0069】
一方、図16,17は、非正常な状態を説明するための図である。図16,17の(a)は、実際の車両の位置関係を示し、図16,17の(b)は、想定位置情報の動きを示し、図16,17の(c)は、想定位置情報の変動から得られる方向データを示している。
【0070】
図16は、実際の車両が微低速で移動している場合を示している。図16の(a)に示すように、実際の車両は微低速で移動している。しかしながら、図16の(b)に示すように、GPSによって得られる想定位置情報は変動していない。従って、図16の(c)に示すように、想定位置情報の変動から得られる方向データは無い。図16に示すような状態となるのは、GPS装置が取得する想定位置情報を更新していないためである。例えば、GPS装置の起動直後といった場面が想定される。
【0071】
図17は、実際の車両が停止している場合を示している。図17の(a)に示すように、実際の車両は停止している。しかしながら、図17の(b)に示すように、GPSによって得られる想定位置情報は乱雑に変動している。従って、図17の(c)に示すように、想定位置情報の変動から得られる方向データは乱雑なものとなっている。
【0072】
図17に示すような状態となるのは、GPSの特性によるものである。GPSは理論上、位置算出毎に若干の誤差を生じる。従って、車両が停止している場合であっても、図17に示すような想定位置情報が取得される場合がある。
【0073】
第2実施例はこれらの場合において、より的確な車両の位置を把握するためのものである。第2実施例における処理手順のメインループは、第1実施例と同様であり、既に図4を参照しながら説明したのでその説明を省略する。図18は、図4のメインループ中における信号処理の処理ループを示す図である。
【0074】
まず、情報処理装置30の位置演算部303が、方向データ処理条件が成立するか判断する(ステップS171)。方向データ処理条件が成立しなければ処理を終了する。方向データ処理条件が成立すれば、後述する処理を行う。
【0075】
続いて、路車間通信データ又は地図データベースデータが利用可能か判断する(ステップS172)。利用可能であれば、通信装置20を経由して路車間通信データを取得し、又は地図情報格納部151から地図データベースデータを取得する(ステップS173)。路車間通信データ又は地図データベースデータを取得すると、後述するステップS178の処理を行う。
【0076】
ステップS172の判断の結果、路車間通信データ又は地図データベースデータが利用可能でない場合、記憶データ利用条件が成立するか判断する(ステップS174)。ここで、記憶データとは、記憶されている方向データのことである。
【0077】
ステップS174の判断の結果、記憶データ利用条件が成立すれば、記憶されている方向データを読み込む(ステップS175)。その後、地磁気センサ104から地磁気センサデータを取得する(ステップS176)。
【0078】
ステップS174の判断結果、記憶データ利用条件が成立しない場合、又はステップS176の処理の後、シフトポジションセンサ103からシフトポジションデータを取得する(ステップS177)。
【0079】
上述したステップS173、ステップS175、ステップS176、及びステップS177で取得した各種データに基づいて、方向データ算出処理を行う(ステップS178)。方向データ算出処理の詳細については後述する。
【0080】
方向データ及びシフトポジションデータの取扱いについて、図19を参照しながら説明する。GPS装置106が停止されるか判断する(ステップS191)。GPS装置106が停止する場合には、方向データ及びシフトポジションデータは、それぞれの最後のデータが記憶される(ステップS192)。その後、GPS装置106が起動されるか判断する(ステップS193)。GPS装置106が起動すると、これら読み込まれて記憶されている方向データ及びシフトポジションデータが読み出される(ステップS194)。
【0081】
シフトポジションデータは、Pポジション又はNポジション以外の走行可能なシフトポジションデータが有効なデータとして取り扱われる。例えば、DポジションやRポジションのデータである。尚、前方走行可能なシフトポジション(1,2,B,S等)は、Dポジションとして取り扱う。
【0082】
尚、車速が0となる直前のシフトポジションデータを有効なものとして記憶する。車速が0となった後に、DポジションからRポジション又はRポジションからDポジションに変更されても、車速が0より大きくならない限りそれらのシフトポジションデータは無効なものとして取り扱う。
【0083】
尚、車両が停止する速度付近で、走行可能なシフトポジションが、異なる走行可能なシフトポジションに変更された場合には、方向データを180°反転して用いる。
【0084】
引き続いて、ステップS178の方向データ算出処理について、具体例を挙げながら説明する。まず、GPS装置106を起動した直後の処理について説明する。
【0085】
起動直後の地磁気センサデータと記憶している方向データとを比較する。また、記憶されているシフトポジションデータと、新に選択されたシフトポジションデータとを比較する。
【0086】
ここで、記憶されているシフトポジションデータがDポジションである場合には、まず、地磁気センサデータと記憶している方向データとを比較する。これらのデータの差分が規定範囲内であれば、記憶している方向データを読み出して、その後の方向データの暫定値として用いる。一方、これらのデータの差分が規定範囲内でなければ、地磁気センサデータの値を、その後の方向データの暫定値として用いる。
【0087】
続いて、新たに選択された走行可能なシフトポジションが、Dポジション相当である場合には、上述した方向データの暫定値を起動時の方向データとして用いる。一方、新たに選択された走行可能なシフトポジションが、Rポジション相当である場合には、上述した方向データの暫定値を180°反転してGPS起動時の方向データとして用いる。
【0088】
一方、記憶されているシフトポジションデータがRポジションである場合には、まず、地磁気センサデータと記憶している方向データを180°反転した値とを比較する。これらのデータの差分が規定範囲内であれば、記憶している方向データを読み出して、その後の方向データの暫定値として用いる。一方、これらのデータの差分が規定範囲内でなければ、地磁気センサデータの値を、その後の方向データの暫定値として用いる。
【0089】
続いて、新たに選択された走行可能なシフトポジションが、Rポジション相当である場合には、上述した方向データの暫定値を起動時の方向データとして用いる。一方、新たに選択された走行可能なシフトポジションが、Dポジション相当である場合には、上述した方向データの暫定値を180°反転してGPS起動時の方向データとして用いる。
【0090】
上述したGPS起動時の方向データは、GPS起動後に得られる方向データとでマージを行う。より具体的には、車速が0より大きくなり、GPS起動時の方向データとGPS起動後に得られる方向データとの乖離が規定値以下であるかが判定される。この条件を満たせば、以降の方向データは、GPS起動後に得られる想定位置情報の変動に基づく方向データを用いる。一方、この条件を満たさない場合は、以降の方向データはGPS起動時の方向データのまま用いる。
【0091】
より具体的に、図20、図21、図22、図23、図24を参照しながら説明する。図20〜22において、それぞれの(a)は実際の車両の位置関係を示し、それぞれの(b)は想定位置情報の動きを示し、それぞれの(c)は使用する方向データを示している。また、図23〜24において、それぞれの(a)は実際の車両の位置関係を示し、それぞれの(b)は想定位置情報の動きを示し、それぞれの(c)は地磁気センサの値を示し、それぞれの(d)は使用する方向データを示している。
【0092】
図20は、停止直前の状態を示す図である。図20に示す例に拠れば、想定位置情報の遷移から得られる方向データは、90°(図中上下方向に伸びる線を基準、以下同じ)となり、この方向データが保持される。
【0093】
続いて、図21は停止時の状態を示す図である。図21に示すように、停止時には想定位置情報が揺らいでしまうが、車速が0であるので、保持されている方向データ(90°)を読み出して使用する。
【0094】
続いて、図22はシフトチェンジ時の状態を示す図である。図22に示すように停止付近でシフトチェンジを行っても想定位置情報に変動は生じないが、実際には進行する方向が反転しているので、保持されている方向データ(90°)を反転させて270°として用いる。
【0095】
続いて、図23はGPS起動時の状態を示す図である。図23に示す例では、シフトポジションの変更がなく、地磁気センサデータと記憶している方向データの値とが同じであるので、記憶している方向データ(90°)を読み出して使用する。
【0096】
続いて、図24はGPS起動時の状態を示す別の例を示した図である。図24に示す例では、シフトポジションが変更されており、地磁気センサデータ(320°)と記憶している方向データの値とが規定範囲内にないので、地磁気センサデータを用いると共に、そのデータを反転させて140°として用いる。
【0097】
続いて、車両停止時の方向データが乱雑になる場合の処理について説明する。この対策としては、対象となる車両の車速が0である場合には、想定位置情報や方向データが更新されても、更新前(すなわち、車速が0出ない場合)の値を用いる。
【0098】
また、路車間通信データが利用可能である場合には、例えば信号機情報が赤信号であるとの情報であれば、信号待ち停止中であると判断して、想定位置情報や方向データが更新されても、更新前(すなわち、車速が0でない場合)の値を用いる。
【0099】
より具体的に図25を参照しながら説明する。図25に示すように、停止中の他車両M2,M3,M4が交差点付近に存在するか否かを判定し、交差点付近に存在すればそれら他車両M2,M3,M4が属する道路リンクR1の信号機S1,S2に関する信号機情報を得る。その信号機情報が、赤信号であることを示す場合、他車両M2,M3,M4が信号待ちであると判断する。従って、車速が0で、信号機が赤信号であるとの条件を満たす場合、他車両M2,M3,M4から想定位置情報等の更新があっても、他車両M2,M3,M4の停止直前の位置及び方向を示すデータをそのまま用いる。
【0100】
また、路車間通信データや地図データベースデータが利用可能である場合には、例えば、対象となる車両の道路リンクの属性方位(方角)を方向データとして用いることも可能である。より具体的には、対象となる車両の最短距離ノードを探索し、道路リンクを抽出する。この際、上下線の分離等も判定し、抽出する。続いて、対象となる車両が属する道路リンクの地図データベースデータを抽出する。この道路リンクが自動車専用道路である場合には、許容する属性方位(方角)を抽出する。ここで、車速が0である場合には渋滞等による停止であると判断し、対象となる車両から想定位置情報等の更新があっても、他車両の停止直前の位置を示すデータをそのまま用いる。また、方向としては上述した属性方位(方角)を用いる。
【0101】
尚、本実施形態では、地磁気センサを用いているが、GPS起動直後の比較用としてのみ用いることで、車両や建物による影響を極力排除している。
【0102】
対象となる車両が2輪車の場合には、上述したDポジションのみを想定した処理のみで対応可能である。
【図面の簡単な説明】
【0103】
【図1】本発明の実施形態である車両制御システムの構成を示す図である。
【図2】図1に示す車両制御システムが適用される状況を説明するための図である。
【図3】図1に示す車両制御システムが適用される状況を説明するための図である。
【図4】図1に示す車両制御システムにおける処理のメインループを示すフローチャートである。
【図5】図1に示す車両制御システムが送受信するデータ構成を示す図である。
【図6】図4に示すメインループの信号処理をより具体的に説明するためのフローチャートである。
【図7】図6における停止判定をより具体的に説明するためのフローチャートである。
【図8】図6における停止判定をより具体的に説明するためのフローチャートである。
【図9】図6における停止判定をより具体的に説明するためのフローチャートである。
【図10】図6における停止判定をより具体的に説明するためのフローチャートである。
【図11】図6における停止判定をより具体的に説明するためのフローチャートである。
【図12】図6における停止判定をより具体的に説明するためのフローチャートである。
【図13】車種による進行方向の判定を行う手順を示したフローチャートである。
【図14】車両の実際の位置と想定位置情報との関係を説明するための図である。
【図15】車両の実際の位置と想定位置情報との関係を説明するための図である。
【図16】車両の実際の位置と想定位置情報との関係を説明するための図である。
【図17】車両の実際の位置と想定位置情報との関係を説明するための図である。
【図18】図4に示すメインループの信号処理をより具体的に説明するためのフローチャートである。
【図19】方向データ及びシフトポジションデータの取扱いについて説明するためのフローチャートである。
【図20】車両の実際の位置と想定位置情報との関係を説明するための図である。
【図21】車両の実際の位置と想定位置情報との関係を説明するための図である。
【図22】車両の実際の位置と想定位置情報との関係を説明するための図である。
【図23】車両の実際の位置と想定位置情報との関係を説明するための図である。
【図24】車両の実際の位置と想定位置情報との関係を説明するための図である。
【図25】車両の位置と道路情報との関係を説明するための図である。
【符号の説明】
【0104】
10…車両制御システム、20…通信装置、30…情報処理装置、40…車両制御装置、101…アンテナ、102…車速センサ、103…シフトポジションセンサ、104…地磁気センサ、105…ウインカースイッチ、106…GPS装置、151…地図情報格納部、201…送信部、202…受信部、301…方向取得部、302…位置取得部、303…位置演算部。
【特許請求の範囲】
【請求項1】
車両の位置を示す車両位置情報を演算する車両位置演算装置であって、
前記車両が移動する移動方向を示す移動方向情報を取得する方向取得手段と、
前記車両外の無線通信手段との間における無線通信結果に基づいて、前記車両の位置を示すと想定される想定位置情報を時系列に沿って取得する位置取得手段と、
前記移動方向情報が示す移動方向と、前記想定位置情報の変動方向とに基づいて、前記車両の位置を示す車両位置情報を算出する位置演算手段と、
を備える車両位置演算装置。
【請求項2】
前記位置演算手段は、前記移動方向情報が示す移動方向と、前記想定位置情報の変動方向とを比較し、それらが指し示す向きが一致しない場合は前記車両は停止していると判断して前記車両位置情報を算出する、請求項1に記載の車両位置演算装置。
【請求項3】
前記無線通信手段との間における無線通信を行う通信手段を備え、
当該通信手段がその機能を停止した場合に、前記方向取得手段は、前記通信手段が停止する直前に取得した想定位置情報の変動方向を前記移動方向とみなし、前記移動方向情報として取得する、請求項1又は2に記載の車両位置演算装置。
【請求項4】
当該車両位置演算装置が演算対象とする車両は、当該車両位置演算装置が搭載される車両とは別の他車両であって、前記移動方向情報及び前記想定位置情報は前記他車両から送信されるものである、請求項1から3のいずれか1項に記載の車両位置演算装置。
【請求項5】
前記移動方向情報は、前記車両の方向指示器が指し示す方向を特定するウインカー情報を含む、請求項1から4のいずれか1項に記載の車両位置演算装置。
【請求項1】
車両の位置を示す車両位置情報を演算する車両位置演算装置であって、
前記車両が移動する移動方向を示す移動方向情報を取得する方向取得手段と、
前記車両外の無線通信手段との間における無線通信結果に基づいて、前記車両の位置を示すと想定される想定位置情報を時系列に沿って取得する位置取得手段と、
前記移動方向情報が示す移動方向と、前記想定位置情報の変動方向とに基づいて、前記車両の位置を示す車両位置情報を算出する位置演算手段と、
を備える車両位置演算装置。
【請求項2】
前記位置演算手段は、前記移動方向情報が示す移動方向と、前記想定位置情報の変動方向とを比較し、それらが指し示す向きが一致しない場合は前記車両は停止していると判断して前記車両位置情報を算出する、請求項1に記載の車両位置演算装置。
【請求項3】
前記無線通信手段との間における無線通信を行う通信手段を備え、
当該通信手段がその機能を停止した場合に、前記方向取得手段は、前記通信手段が停止する直前に取得した想定位置情報の変動方向を前記移動方向とみなし、前記移動方向情報として取得する、請求項1又は2に記載の車両位置演算装置。
【請求項4】
当該車両位置演算装置が演算対象とする車両は、当該車両位置演算装置が搭載される車両とは別の他車両であって、前記移動方向情報及び前記想定位置情報は前記他車両から送信されるものである、請求項1から3のいずれか1項に記載の車両位置演算装置。
【請求項5】
前記移動方向情報は、前記車両の方向指示器が指し示す方向を特定するウインカー情報を含む、請求項1から4のいずれか1項に記載の車両位置演算装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【公開番号】特開2008−26024(P2008−26024A)
【公開日】平成20年2月7日(2008.2.7)
【国際特許分類】
【出願番号】特願2006−195813(P2006−195813)
【出願日】平成18年7月18日(2006.7.18)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成20年2月7日(2008.2.7)
【国際特許分類】
【出願日】平成18年7月18日(2006.7.18)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]