
車両位置演算装置
【課題】 一般に電子基準点から移動体までの距離が長くなるに従い測位性能が低下する。移動体が電子基準点をまたぐような広い範囲を計測対象として計測する場合であっても、測位結果の段差表示を少なくして、より精度の高い計測結果を表示する位置計測装置を提供する。
【解決手段】 予め定められたヒステリシス値を記憶する記憶部を備える。車両位置演算装置は、移動体の単独測位位置から複数の基準局の中で予め指定された指定基準局までの距離と、単独測位位置から前記指定基準局以外の基準局までの距離に前記ヒステリシス値を加算した距離との中から、最も近い距離にある基準局を抽出し、当該基準局を指定基準局に設定し、この指定基準局が有する補正情報とGPS衛星からの観測データとに基づき前記移動体の走行位置を算出する。
【解決手段】 予め定められたヒステリシス値を記憶する記憶部を備える。車両位置演算装置は、移動体の単独測位位置から複数の基準局の中で予め指定された指定基準局までの距離と、単独測位位置から前記指定基準局以外の基準局までの距離に前記ヒステリシス値を加算した距離との中から、最も近い距離にある基準局を抽出し、当該基準局を指定基準局に設定し、この指定基準局が有する補正情報とGPS衛星からの観測データとに基づき前記移動体の走行位置を算出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、人工衛星が送信する測位情報と電子基準点が送信する補正情報とを受信して位置を測位する位置計測装置に関するものである。特に、車両などの移動体が広い範囲を移動する場合にも、適正な電子基準点を選択しながら高精度な測位結果を出力する位置計測装置に関するものである。
【背景技術】
【0002】
近年、カーナビゲーションシステムなどに代表されるGIS(Geographical Information System)とGPS(Global Positioning System)を組み合わせた製品の普及が著しい。また、一方で、GISとGPSによる位置情報をITS(Intelligent Transport Systems)の安全運転へ応用することが期待されており、道路上・道路脇の地物の位置情報は有効な情報であると考えられている。
また一方で、道路周辺の地物の情報を記録した道路管理台帳の高精度化、高度化が望まれている。しかしながら、1/500のスケールでキロポスト、標識、ガードレール、白線などの道路上・道路脇の地物の位置を記録する道路管理台帳の作成には、高い精度を持つ測量を行う必要があるため、GPSと距離・角度を計測するトータルステーションとを用いた静止測量が行われている。また、国道には往復30kmの区間に計測対象となる地物が約2000も存在していることもある。そのため、全国の道路管理台帳の高度化・高精度化には莫大な費用と時間とを要する。
そこで、情報収集時間および費用の縮減を目的としてMMS(Mobile Mapping System)が注目され研究開発が行われている(例えば、特許文献1参照)。上記のようなMMSでは、基本性能として、走行する移動体の自己位置の測位を高精度に行うことが必要である。このため、人工衛星が送信する測位情報のほかに電子基準点が送信する補正情報も用いて自己位置を計測することも行われている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】WO2008/099915号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、電子基準点が送信する補正情報を用いて自己位置を計測する移動体の測位では、一般に電子基準点から移動体までの距離が長くなるに従い測位性能(FIX率、測位精度)が低下し、更にある距離以上になると計測が不可能になるという問題があった。
このためこれから計測を開始する計画段階では、まず電子基準点を設定し、設定した電子基準点から一定距離以上離れない範囲で計測を行う、というような計画を立てる必要があった。電子基準点から一定距離以上離れるような場合、例えば高速道路の計測のように広い範囲を長い距離計測するような場合では、電子基準点ごとに計測エリアを設定し、計測対象を電子基準点ごとの複数の計測エリアに分割して各計測エリアで計測を行い、後の工程で、計測エリアごとに計測した計測結果を継ぎ合わせる、というような処理が必要であった。
【0005】
このように計測結果を継ぎ合わせる場合であっても継ぎ合わせの箇所で計測結果が必ずしも一致するわけではなく、継ぎ合わせの箇所の表示に段差ができてしまうという問題があった。特に、移動体が継ぎ合わせの箇所を複数回行き来するような場合では、段差表示が多くなるという課題があった。
また、電子基準点ごとに計測エリアを設定し、計測エリア内の電子基準点からの補正情報を用いて計測を行う場合であっても、隣接する計測エリア内の電子基準点からの補正情報を用いたほうが計測の精度が高い場合もある、という課題があった。
【0006】
この発明は係る課題を解決するためになされたもので、移動体が広い範囲を計測対象として計測する場合であっても、計測結果の段差表示を少なくして、より精度の高い計測結果を表示する車両位置演算装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
この発明の車両位置演算装置は、GPS(Global Positioning System)を搭載した移動体が、複数の基準局で各々有する測位に関する補正情報のカバーエリアを走行中にGPS衛星から観測した観測データと、前記複数の基準局の各々が有する前記補正情報とを用いて前記移動体が走行した走行位置を算出する車両位置演算装置であって、前記車両位置演算装置は、予め定められたヒステリシス値を記憶する記憶部を備え、前記車両位置演算装置は、前記観測データを用いて単独測位された前記移動体の単独測位位置から前記複数の基準局の中で予め指定された指定基準局までの距離と、前記移動体の単独測位位置から前記指定基準局以外の基準局までの距離に前記ヒステリシス値を加算した距離と、の中から最も近い距離にある基準局を抽出し、当該基準局を指定基準局に新たに設定するとともに当該基準局が有する補正情報と前記観測データとに基づき前記移動体の走行位置を算出する。
【発明の効果】
【0008】
本発明によれば、計測結果の段差表示を少なくして、より精度の高い計測結果を表示することができる。
【図面の簡単な説明】
【0009】
【図1】特許文献1に記載されている道路地物計測システム101のシステム構成および道路地物計測装置100の機能構成を示す図である。
【図2】実施の形態1に係る車両位置姿勢(3軸)演算部110の処理フローを説明する図である。
【図3】実施の形態1に係る計測台車102の走行軌跡の一例である。
【図4】実施の形態1に係る補正位置データリスト(A)103の一例である。
【図5】実施の形態1に係る基準局距離データリスト(B)104の一例である。
【図6】実施の形態1に係る道路地物計測装置(計算機)100が行う複数基準点処理の処理フローである。
【図7】従来の移動体の測位技術を説明する図である。
【図8】従来の移動車両D が誤差平面10のエリアから誤差平面20のエリアに移動する様子を示す図である。
【発明を実施するための形態】
【0010】
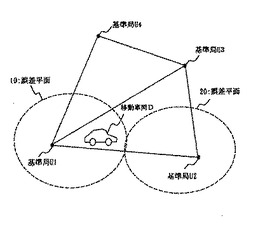
図7は、特開2006−275882号公報に記載された従来の技術を説明する図である。図7に示すように基準局U1、基準局U2(例えば電子基準点)は、それぞれ誤差平面10、誤差平面20を有している。移動車両Dは、誤差平面10がカバーするエリアに存在する場合には、位置測位において誤差平面10に基づく誤差情報を取得し、取得した誤差情報を用いて測位を行っていた。また、移動により移動車両 Dが誤差平面20のエリアに存在する場合、移動車両 Dは、位置測位において、誤差平面20に基づく誤差情報を取得し、取得した誤差情報を用いて測位を行っていた。
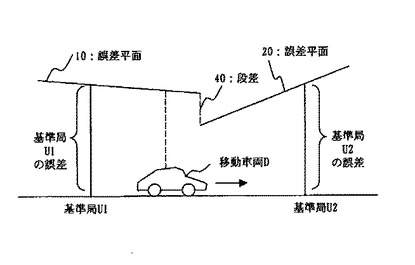
図8は、移動車両D が誤差平面10のエリアから誤差平面20のエリアに移動する様子を示す図である。移動車両Dが誤差平面10のエリアから誤差平面20のエリアに移動する場合、使用する誤差情報に段差40が生じる。このため、この段差40に基づき、補正情報を用いた測位結果には、段差が生じていた。
特に移動車両Dが誤差平面10のエリアと誤差平面20のエリアを行き来するような場合には、測位結果には頻繁に段差が生じてしまい、測位結果の信頼性に課題が生じていた。
【0011】
実施の形態1.
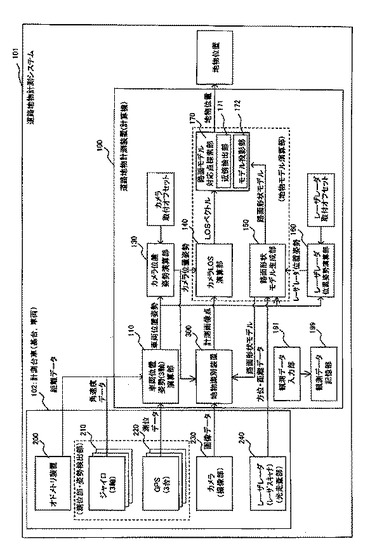
図1は、特許文献1に記載されている道路地物計測システム101のシステム構成および道路地物計測装置100の機能構成を示す図である。
道路地物計測システム101はオドメトリ装置200、3台のジャイロ210(測位部、姿勢検出部、GPSジャイロの一部)、3台のGPS220(測位部、姿勢検出部、GPSジャイロの一部)、カメラ230(撮像部)、レーザレーダ240(光走査部、レーザスキャナ、LRF[Laser Range Finder])および道路地物計測装置100(計算機)を備える。
【0012】
オドメトリ装置200、3台のジャイロ210、3台のGPS220、カメラ230、レーザレーダ240(それぞれ、計測センサの一例である)は計測台車102(以下、車両とする)の天板103(基台)に搭載される。
オドメトリ装置200はオドメトリ手法を実行し車両の走行距離を示す距離データを算出する。
3台のジャイロ210は車両の3軸方向の傾き(ピッチ角、ロール角、ヨー角)を示す角速度データを算出する。
3台のGPS220は車両の走行位置(座標)を示す測位データを算出する。
オドメトリ装置200とジャイロ210とGPS220とはGPS/デッドレコニング複合演算により車両の位置、姿勢を測定する。
カメラ230は撮影を行い時系列の画像データを出力する。
レーザレーダ240は、車体の前方または後方に設置され、横方向に光軸を振りながらレーザをななめ下方向に照射して、路面までの距離を各方位について示す方位・距離データ(以下、LRFデータとする)を算出する。
【0013】
道路地物計測装置100は距離データ、角速度データ、測位データ、画像データ、方位・距離データに基づいてユーザの指定した地物の位置を算出する。
道路地物計測装置100は車両位置姿勢(3軸)演算部110、カメラ位置姿勢演算部130、カメラLOS演算部140、路面形状モデル生成部150、レーザレーダ位置姿勢演算部160、路面モデル対応点探索部170、地物識別装置300、観測データ入力部191、観測データ記憶部199を備える。なお、車両位置姿勢(3軸)演算部110は車両位置演算装置に対応する。
【0014】
車両位置姿勢(3軸)演算部110は距離データ、角速度データ、測位データに基づいて車両の位置と姿勢(車両位置姿勢)を算出する。
道路地物計測装置100は、車両位置姿勢(3軸)演算部110が演算した車両の位置と姿勢(車両位置姿勢)に基づき地物位置の計算を行い、最終的に、路面モデル対応点探索部170(地物位置算出部の一例)はユーザが指定した地物の位置を算出する。なお、道路地物計測装置100が実行する処理の詳細については、特許文献1に記載されている。
【0015】
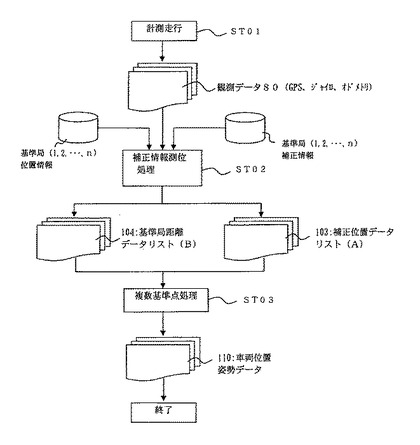
次に、実施の形態1に係る車両位置姿勢(3軸)演算部110の処理フローについて説明する。図2は車両位置姿勢(3軸)演算部110が、計測台車から受け取った観測データに基づいて車両位置姿勢データを取得するまでのフローを説明する図である。以下、図2に沿って、説明する。
【0016】
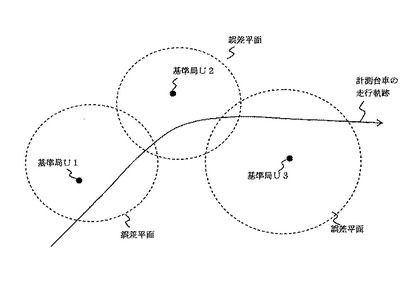
オドメトリ装置200、ジャイロ210、GPS220等を備えた計測台車102は、計測の対象とするエリアを走行する(計測走行)(ステップ:ST01)。このとき計測台車102は、計測対象となるエリアを走行中にオドメトリ装置200、ジャイロ210、GPS220等の計測センサ取得した観測データ80を、記憶装置(図示せず)に順次、時系列に記憶していく。これにより計測走行が完了した時点において、記憶装置には、計測台車102が走行中に取得した計測対象エリアの観測データ80全て記憶されていることになる。なお、本実施の形態では、計測台車102は図3に示すように複数の基準局Uがカバーするエリアをまたいで走行するものであり、複数の基準局Uが各々カバーするエリアを計測しようとしているものとする。図3に記載された誤差平面の概念は、特開2006−275882号公報や特開2001−228234号公報等に記載されたものと同様のものである。
【0017】
道路地物計測装置(計算機)100の車両位置姿勢(3軸)演算部110は、先に記憶装置に記憶された観測データ80と基準点の補正情報等を用いて、時間毎の計測台車102の車両の位置と姿勢(車両位置姿勢)を演算する。
車両位置姿勢(3軸)演算部110は、観測データ80と、基準局Uiが保有する補正情報とにより、補正された計測台車102の位置情報を計算する(ST02)。
計測台車102は観測データ80を所定の周期で取得しており、車両位置姿勢(3軸)演算部110は基準局Uiが保有する補正情報により補正された計測台車102の位置情報を時系列で計算し、取得する。
そして、車両位置姿勢(3軸)演算部110は、予め設定していた基準局Uの全ての基準局Ui(i=1、2、・・・、n)に関して、基準局Uiごとに、当該基準局Uiが保有する補正情報とにより補正された計測台車102の位置情報を計算する。
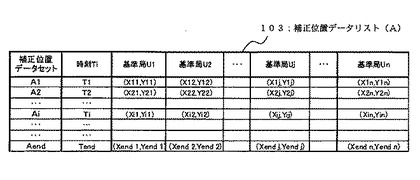
車両位置姿勢(3軸)演算部110は、基準局Uごとに、各基準局が保有する補正情報により補正した計測台車102の位置情報を時系列にまとめた補正位置データリスト(A)103を作成する。
図4は、補正位置データリスト(A)103の一例である。図4で示したリスト中、横軸は基準局であり、基準局U1〜Unが予め設定されている。基準局U1〜Unは、計測台車102が走行するエリアの情報から予め抽出されている。あるいは、基準局を抽出しておく作業を省く場合は、演算処理の負担は増加するが、国土に設置されている全ての基準局を予め設定しておくことも可能である。補正位置データリスト(A)103の縦軸は時間(T1、T2、・・・、Tend)であり観測データ80を取得した時刻(イベント情報)が記録される。列方向には、同時刻(Ti)における各基準局Ujの補正情報で補正された位置情報(補正位置)の演算結果が並べられる。各列は、補正位置データセットAi(i=1〜end)として抽出可能である。例えば、補正位置データセットA2を抽出した場合は、時刻T2における、各基準局U1〜Unの補正情報により補正された計測台車102の位置情報を抽出できる。
【0018】
また、道路地物計測装置(計算機)100は、補正情報を計算に加えず観測データ80のみに基づき計測台車102の位置情報を計算する(単独測位)(ST02)。ここでは各基準局が保有する補正情報は計算に入れない。この観測データのみによる位置の計算結果を以下、単独測位結果を呼ぶ。
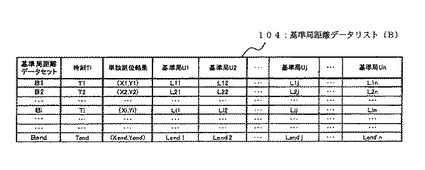
道路地物計測装置(計算機)100は、単独測位結果と基準局Uが設置されている設置場所の位置情報とから、各時刻(Ti)における計測台車102と各基準局Uiとの距離(基準局距離)を計算し、それらの結果を表にした基準局距離データリスト(B)104を作成する。
図5は、基準局距離データリスト(B)104の一例である。横軸は基準局Uj、縦軸は時間(T1、T2、・・・、Tend)であり、同時刻(Ti)における単独測位結果と各基準局Ujの位置との距離(基準局距離)Lijが列方向に並べられる。各列は、基準局距離データセットBi(i=1〜end)として抽出可能である。例えば、基準局距離データセットB2を抽出した場合は、時刻T2における、計測台車102の位置(単独測位結果)と各基準局U1〜Unとの距離L2j(j=1〜n)を抽出できる。
【0019】
次に、道路地物計測装置(計算機)100は複数基準点処理を実行する(ST03)。複数基準点処理の内容については次に説明する。道路地物計測装置(計算機)100は、この複数基準点処理により得られた結果を車両の位置と姿勢を表わす車両位置姿勢データとして取得する。
【0020】
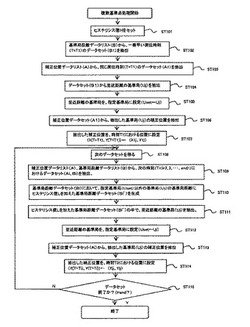
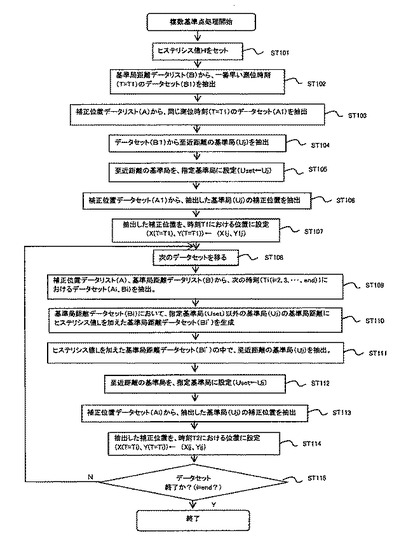
ここで、複数基準点処理(ST03)について説明する。図6は、道路地物計測装置(計算機)100が行う複数基準点処理の処理フローであり、以下、図6に従い複数基準点処理のフローを説明する。
複数基準点処理を開始するにあたり、まず、ヒステリシス値Hをセットする(ST101)。このヒステリシス値Hとは、補正情報として使用する基準局Uを選択する際、直ぐに選択した基準局Uが変わったり、また元に戻ったりすることがないように、設定する値である。ヒステリシス値Hは計測毎に設定できるが、例えば5Kmなどの値を設定する。ヒステリシス値Hは記憶部(図示せず)に記憶される。
【0021】
道路地物計測装置(計算機)100は、基準局距離データリスト(B)104から一番早い測位時刻(T=T1)の基準局距離データセットB1を抽出する(ST102)。
また、道路地物計測装置(計算機)100は、補正位置データリスト(A)103から、同じ測位時刻(T=T1)の補正位置データセットA1を抽出する(ST103)。
道路地物計測装置(計算機)100は、時刻(T=T1)の基準局距離データセット(B1)の中から、計測台車102の位置(単独測位結果)から至近距離にある基準局(Ui)を抽出する。(ST104)。
道路地物計測装置(計算機)100は、ステップST104により至近距離として抽出された基準局Uiを指定基準局Usetに設定する(ST105)。
そして、道路地物計測装置(計算機)100は、測位時刻(T=T1)の補正位置データセットA1の中から、至近距離にあった当該基準局Uiの補正情報により補正した補正位置を抽出する(ST106)。
道路地物計測装置(計算機)100は、ST106により抽出した補正位置を、時刻T=T1における計測台車102の位置として定めて、車両位置姿勢データ115として格納する。
【0022】
このようにして最初の時刻T=T1における計測台車102の位置と指定基準局Usetを定めた後、道路地物計測装置(計算機)100は次の時刻(T=T2)における計測台車102の位置を演算する(ST108)。
道路地物計測装置(計算機)100は、基準局距離データリスト(B)104から測位時刻(T=T2)の基準局距離データセット(B2)を抽出する(ST109)。また、道路地物計測装置(計算機)100は、補正位置データリスト(A)103から、同じ測位時刻(T=T2)の補正位置データセットA2を抽出する(ST109)。
次に、道路地物計測装置(計算機)100は、基準局距離データセットB2において、先に指定した指定基準局(Uset)以外の基準局の基準局距離にヒステリシス値Hを加えた基準局距離データセットB2’を生成する(ST110)。
道路地物計測装置(計算機)100は、ヒステリシス値Hを加えた基準局距離データセットB2’の中から、基準局距離Lijが最も値の小さい基準局(Uj)を抽出する(ST111)。
道路地物計測装置(計算機)100は、ST111で抽出した基準局(Uj)を指定基準局に上書きする(ST112)。ステップS105で設定した最初の指定基準局と同じであればそのままとしておいてもよい。
道路地物計測装置(計算機)100は、補正位置データセットA2から、ステップS111で抽出した最も値の小さい基準局(Uj)における補正位置を抽出し(ST113)、抽出した補正位置を時刻T=T2における計測台車102の位置として定めて、車両位置姿勢データ115として格納する(ST114)。
【0023】
時刻T=T3以降の処理についても、時刻T=T2のときと同様の処理を行う。すなわち基準局距離データセット(B3)において、指定基準局Uset以外の基準局の基準局距離Lijにヒステリシス値Hを加算した基準局距離データセットB3’を生成する。生成した基準局距離データセットB3’において、基準局距離Lijが最も値の小さい基準局(Uj)を抽出する。そして、抽出した基準局(Uj)に対応する補正位置を補正位置データセットA3から抽出し、この補正位置を時刻T=T3における計測台車102の位置として定めて、車両位置姿勢データ115として格納する。指定基準局Usetには基準局距離データセットB3’において基準局距離Lijが最も小さかった(至近距離にある)基準局(Uj)を割り当てる。
このように、ヒステリシス値Hを加算した基準局距離データセットB3’の中から最も値の小さい基準局(Uj)を抽出することで、計測車両102が、隣接する基準局がカバーするエリアの継ぎ合わせの箇所を複数回行き来するような場合であっても、補正処理に使用する指定基準局Usetを頻繁に変えることが無くなり、計測結果に段差を生じることを抑えることができるようになる。
【0024】
時刻の最後T=Tendのデータセットまで処理が完了した時点で、道路地物計測装置(計算機)100は、演算処理を終了する(ST115)
【0025】
以上のように、実施の形態1の位置計測装置では、車両位置姿勢(3軸)演算部110は、計測台車102が計測走行して取得した観測データ80と、各基準局が保有する補正情報と、各基準局が設置されている位置情報とから、観測データ80を取得した時刻毎に、各基準局が各々保有する補正情報で単独測位結果を補正をした補正位置をリスト化した補正位置データリスト(A)と、同じく観測データ80を取得した時刻毎に、各基準局と各時刻における単独測位結果の位置との距離(基準局距離)をリスト化した基準局距離データリスト(B)を生成するようにした。そして、車両位置姿勢(3軸)演算部110は基準局の中に指定基準局Usetを設け、計測台車の位置は、指定基準局Usetが保有する補正情報により補正した位置情報を採用するようにした。指定基準局Usetの設定にあたっては、最初(T=T1)は補正位置データリスト(A)の中から至近距離にある基準局を指定基準局Usetと設定し、次の時刻(T=T2)以降は、基準局距離データリスト(B)において、指定基準局Uset以外の基準局の基準局距離にヒステリシス値Hを加算し、加算した基準局距離データリスト(A)の中から、至近距離にある基準局を抽出し、抽出した基準局を新たな指定基準局Usetにするとともに、当該抽出した基準局に対応する補正位置を補正位置データリスト(B)から抽出し、当該抽出した位置をその時刻における計測台車102の位置として定めるようにした。
これにより、従来から表示されていた計測結果の段差表示を少なくして、より精度の高い計測結果を表示することができる。
【0026】
実施の形態2.
実施の形態1では、至近距離にある基準局の補正情報で補正した位置を計測台車102の位置として定めていた。しかしながら標高差や局所的な電離層の影響によっては、至近距離にある基準局で誤差が大きく、遠方の基準局の方が高い位置精度を得られる場合がある。
そこで、実施の形態2では、実施の形態1において至近距離の基準局の補正情報を用いて定めた計測台車102の位置と、同時刻の他の補正位置データリスト(A)103で演算された補正位置とを比較し、計測台車102の位置が、同時刻の他の補正位置データリスト(A)103で演算された位置の平均値から所定の値以上の差があったときは、至近距離の基準局の補正情報を用いて定めた計測台車102の位置を棄却するような処理を行う。
これにより、明らかに誤った計測結果を棄却することができ、より信頼性の高い計測結果を表示することができる。
なお、上記では演算された位置の平均を求めて比較をしているが、その他、誤差の大きい位置を予め除外した後に平均を算出するなど、種々の方法により誤差の大きい結果を除外するようにしてもよい。
【0027】
実施の形態3.
実施の形態2では明らかに誤った計測結果を棄却するようにしたが、このような場合にあっては補正位置データリスト(B)から2番目に近い基準局を抽出し、当該抽出した基準局が保有する補正データで補正した位置を計測台車102の位置として定めるようにしてもよい。
これにより、明らかに誤った計測結果を棄却した場合であっても次善の結果を表示することができ、計測結果(測位結果)が表示されないエリアを縮小することができる。
【0028】
実施の形態4.
実施の形態1では至近距離にある基準局の補正情報で補正した位置を計測台車102の位置として定めていた。しかしながら至近距離にある基準局の補正情報を用いて測位計算を行った場合に、計測台車102と至近距離の基準局との間に遮蔽物などがあることでこの至近局では測位解が得られず、一方、距離が至近距離の基準局より若干遠くなる別の基準局では測位解が得られる場合がある。このような場合に、至近距離の基準局では計測台車102の位置が測位できなかったと判断して測位解なしの処理を行うことも可能であるが、別の基準局で得られた測位結果を利用したいという場合もある。なお、ここで測位解が得られないとは、いわゆる解がFixしない(Fix解が得られない)状態をいう。
【0029】
そこで、実施の形態4では、実施の形態1のように至近距離にある基準局の補正情報を用いて演算したところ測位解が得られなかった場合に、測位解が得られている別の基準局の測位解を計測台車102の位置として採用する処理を追加する。
具体的には、車両位置姿勢(3軸)演算部110は、実施の形態1の処理で至近距離の基準局の補正情報を用いて計測台車102の位置が得られなかったと判断すると、同時刻の他の補正位置データリスト(A)103の中で補正位置が得られているものがあるか否かを調べる。そして、補正位置が得られているものがあると分かった場合に、基準局距離データリスト(B)104を参照し、補正位置が得られている基準局の中で最も近い距離にある基準局を抽出し、その基準局における補正位置を補正位置データリスト(A)103から抽出して計測台車102の位置として採用する。
【0030】
これにより、測位率を全体として向上することができ、次善の結果を表示することができることで計測結果(測位結果)が全く表示されないというエリアを縮小することができる。
【0031】
なお、補正位置が得られている基準局の中で最も近い距離にある基準局を抽出した場合に、その基準局までの距離と、測位解が得られなかった至近距離にある基準局までの距離との差分を計算し、その差分が予め定めた所定の距離より大きい場合には計測台車102の位置の測位結果は無し(解なし)と判断する処理を実行するようにしてもよい。
これにより、計測結果(測位結果)が全く表示されないというエリアを縮小しながら、計測結果の信頼性も向上させることができる。
【符号の説明】
【0032】
10 誤差平面、20 誤差平面、80 観測データ、100 道路地物計測装置(計算機)、102 計測台車、103 補正位置データリスト(A)、104 基準局距離データリスト(B)、110 車両位置姿勢(3軸)演算部、115 車両位置姿勢データ、200 オドメトリ装置、210 ジャイロ、220 GPS。
【技術分野】
【0001】
本発明は、人工衛星が送信する測位情報と電子基準点が送信する補正情報とを受信して位置を測位する位置計測装置に関するものである。特に、車両などの移動体が広い範囲を移動する場合にも、適正な電子基準点を選択しながら高精度な測位結果を出力する位置計測装置に関するものである。
【背景技術】
【0002】
近年、カーナビゲーションシステムなどに代表されるGIS(Geographical Information System)とGPS(Global Positioning System)を組み合わせた製品の普及が著しい。また、一方で、GISとGPSによる位置情報をITS(Intelligent Transport Systems)の安全運転へ応用することが期待されており、道路上・道路脇の地物の位置情報は有効な情報であると考えられている。
また一方で、道路周辺の地物の情報を記録した道路管理台帳の高精度化、高度化が望まれている。しかしながら、1/500のスケールでキロポスト、標識、ガードレール、白線などの道路上・道路脇の地物の位置を記録する道路管理台帳の作成には、高い精度を持つ測量を行う必要があるため、GPSと距離・角度を計測するトータルステーションとを用いた静止測量が行われている。また、国道には往復30kmの区間に計測対象となる地物が約2000も存在していることもある。そのため、全国の道路管理台帳の高度化・高精度化には莫大な費用と時間とを要する。
そこで、情報収集時間および費用の縮減を目的としてMMS(Mobile Mapping System)が注目され研究開発が行われている(例えば、特許文献1参照)。上記のようなMMSでは、基本性能として、走行する移動体の自己位置の測位を高精度に行うことが必要である。このため、人工衛星が送信する測位情報のほかに電子基準点が送信する補正情報も用いて自己位置を計測することも行われている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】WO2008/099915号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、電子基準点が送信する補正情報を用いて自己位置を計測する移動体の測位では、一般に電子基準点から移動体までの距離が長くなるに従い測位性能(FIX率、測位精度)が低下し、更にある距離以上になると計測が不可能になるという問題があった。
このためこれから計測を開始する計画段階では、まず電子基準点を設定し、設定した電子基準点から一定距離以上離れない範囲で計測を行う、というような計画を立てる必要があった。電子基準点から一定距離以上離れるような場合、例えば高速道路の計測のように広い範囲を長い距離計測するような場合では、電子基準点ごとに計測エリアを設定し、計測対象を電子基準点ごとの複数の計測エリアに分割して各計測エリアで計測を行い、後の工程で、計測エリアごとに計測した計測結果を継ぎ合わせる、というような処理が必要であった。
【0005】
このように計測結果を継ぎ合わせる場合であっても継ぎ合わせの箇所で計測結果が必ずしも一致するわけではなく、継ぎ合わせの箇所の表示に段差ができてしまうという問題があった。特に、移動体が継ぎ合わせの箇所を複数回行き来するような場合では、段差表示が多くなるという課題があった。
また、電子基準点ごとに計測エリアを設定し、計測エリア内の電子基準点からの補正情報を用いて計測を行う場合であっても、隣接する計測エリア内の電子基準点からの補正情報を用いたほうが計測の精度が高い場合もある、という課題があった。
【0006】
この発明は係る課題を解決するためになされたもので、移動体が広い範囲を計測対象として計測する場合であっても、計測結果の段差表示を少なくして、より精度の高い計測結果を表示する車両位置演算装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
この発明の車両位置演算装置は、GPS(Global Positioning System)を搭載した移動体が、複数の基準局で各々有する測位に関する補正情報のカバーエリアを走行中にGPS衛星から観測した観測データと、前記複数の基準局の各々が有する前記補正情報とを用いて前記移動体が走行した走行位置を算出する車両位置演算装置であって、前記車両位置演算装置は、予め定められたヒステリシス値を記憶する記憶部を備え、前記車両位置演算装置は、前記観測データを用いて単独測位された前記移動体の単独測位位置から前記複数の基準局の中で予め指定された指定基準局までの距離と、前記移動体の単独測位位置から前記指定基準局以外の基準局までの距離に前記ヒステリシス値を加算した距離と、の中から最も近い距離にある基準局を抽出し、当該基準局を指定基準局に新たに設定するとともに当該基準局が有する補正情報と前記観測データとに基づき前記移動体の走行位置を算出する。
【発明の効果】
【0008】
本発明によれば、計測結果の段差表示を少なくして、より精度の高い計測結果を表示することができる。
【図面の簡単な説明】
【0009】
【図1】特許文献1に記載されている道路地物計測システム101のシステム構成および道路地物計測装置100の機能構成を示す図である。
【図2】実施の形態1に係る車両位置姿勢(3軸)演算部110の処理フローを説明する図である。
【図3】実施の形態1に係る計測台車102の走行軌跡の一例である。
【図4】実施の形態1に係る補正位置データリスト(A)103の一例である。
【図5】実施の形態1に係る基準局距離データリスト(B)104の一例である。
【図6】実施の形態1に係る道路地物計測装置(計算機)100が行う複数基準点処理の処理フローである。
【図7】従来の移動体の測位技術を説明する図である。
【図8】従来の移動車両D が誤差平面10のエリアから誤差平面20のエリアに移動する様子を示す図である。
【発明を実施するための形態】
【0010】
図7は、特開2006−275882号公報に記載された従来の技術を説明する図である。図7に示すように基準局U1、基準局U2(例えば電子基準点)は、それぞれ誤差平面10、誤差平面20を有している。移動車両Dは、誤差平面10がカバーするエリアに存在する場合には、位置測位において誤差平面10に基づく誤差情報を取得し、取得した誤差情報を用いて測位を行っていた。また、移動により移動車両 Dが誤差平面20のエリアに存在する場合、移動車両 Dは、位置測位において、誤差平面20に基づく誤差情報を取得し、取得した誤差情報を用いて測位を行っていた。
図8は、移動車両D が誤差平面10のエリアから誤差平面20のエリアに移動する様子を示す図である。移動車両Dが誤差平面10のエリアから誤差平面20のエリアに移動する場合、使用する誤差情報に段差40が生じる。このため、この段差40に基づき、補正情報を用いた測位結果には、段差が生じていた。
特に移動車両Dが誤差平面10のエリアと誤差平面20のエリアを行き来するような場合には、測位結果には頻繁に段差が生じてしまい、測位結果の信頼性に課題が生じていた。
【0011】
実施の形態1.
図1は、特許文献1に記載されている道路地物計測システム101のシステム構成および道路地物計測装置100の機能構成を示す図である。
道路地物計測システム101はオドメトリ装置200、3台のジャイロ210(測位部、姿勢検出部、GPSジャイロの一部)、3台のGPS220(測位部、姿勢検出部、GPSジャイロの一部)、カメラ230(撮像部)、レーザレーダ240(光走査部、レーザスキャナ、LRF[Laser Range Finder])および道路地物計測装置100(計算機)を備える。
【0012】
オドメトリ装置200、3台のジャイロ210、3台のGPS220、カメラ230、レーザレーダ240(それぞれ、計測センサの一例である)は計測台車102(以下、車両とする)の天板103(基台)に搭載される。
オドメトリ装置200はオドメトリ手法を実行し車両の走行距離を示す距離データを算出する。
3台のジャイロ210は車両の3軸方向の傾き(ピッチ角、ロール角、ヨー角)を示す角速度データを算出する。
3台のGPS220は車両の走行位置(座標)を示す測位データを算出する。
オドメトリ装置200とジャイロ210とGPS220とはGPS/デッドレコニング複合演算により車両の位置、姿勢を測定する。
カメラ230は撮影を行い時系列の画像データを出力する。
レーザレーダ240は、車体の前方または後方に設置され、横方向に光軸を振りながらレーザをななめ下方向に照射して、路面までの距離を各方位について示す方位・距離データ(以下、LRFデータとする)を算出する。
【0013】
道路地物計測装置100は距離データ、角速度データ、測位データ、画像データ、方位・距離データに基づいてユーザの指定した地物の位置を算出する。
道路地物計測装置100は車両位置姿勢(3軸)演算部110、カメラ位置姿勢演算部130、カメラLOS演算部140、路面形状モデル生成部150、レーザレーダ位置姿勢演算部160、路面モデル対応点探索部170、地物識別装置300、観測データ入力部191、観測データ記憶部199を備える。なお、車両位置姿勢(3軸)演算部110は車両位置演算装置に対応する。
【0014】
車両位置姿勢(3軸)演算部110は距離データ、角速度データ、測位データに基づいて車両の位置と姿勢(車両位置姿勢)を算出する。
道路地物計測装置100は、車両位置姿勢(3軸)演算部110が演算した車両の位置と姿勢(車両位置姿勢)に基づき地物位置の計算を行い、最終的に、路面モデル対応点探索部170(地物位置算出部の一例)はユーザが指定した地物の位置を算出する。なお、道路地物計測装置100が実行する処理の詳細については、特許文献1に記載されている。
【0015】
次に、実施の形態1に係る車両位置姿勢(3軸)演算部110の処理フローについて説明する。図2は車両位置姿勢(3軸)演算部110が、計測台車から受け取った観測データに基づいて車両位置姿勢データを取得するまでのフローを説明する図である。以下、図2に沿って、説明する。
【0016】
オドメトリ装置200、ジャイロ210、GPS220等を備えた計測台車102は、計測の対象とするエリアを走行する(計測走行)(ステップ:ST01)。このとき計測台車102は、計測対象となるエリアを走行中にオドメトリ装置200、ジャイロ210、GPS220等の計測センサ取得した観測データ80を、記憶装置(図示せず)に順次、時系列に記憶していく。これにより計測走行が完了した時点において、記憶装置には、計測台車102が走行中に取得した計測対象エリアの観測データ80全て記憶されていることになる。なお、本実施の形態では、計測台車102は図3に示すように複数の基準局Uがカバーするエリアをまたいで走行するものであり、複数の基準局Uが各々カバーするエリアを計測しようとしているものとする。図3に記載された誤差平面の概念は、特開2006−275882号公報や特開2001−228234号公報等に記載されたものと同様のものである。
【0017】
道路地物計測装置(計算機)100の車両位置姿勢(3軸)演算部110は、先に記憶装置に記憶された観測データ80と基準点の補正情報等を用いて、時間毎の計測台車102の車両の位置と姿勢(車両位置姿勢)を演算する。
車両位置姿勢(3軸)演算部110は、観測データ80と、基準局Uiが保有する補正情報とにより、補正された計測台車102の位置情報を計算する(ST02)。
計測台車102は観測データ80を所定の周期で取得しており、車両位置姿勢(3軸)演算部110は基準局Uiが保有する補正情報により補正された計測台車102の位置情報を時系列で計算し、取得する。
そして、車両位置姿勢(3軸)演算部110は、予め設定していた基準局Uの全ての基準局Ui(i=1、2、・・・、n)に関して、基準局Uiごとに、当該基準局Uiが保有する補正情報とにより補正された計測台車102の位置情報を計算する。
車両位置姿勢(3軸)演算部110は、基準局Uごとに、各基準局が保有する補正情報により補正した計測台車102の位置情報を時系列にまとめた補正位置データリスト(A)103を作成する。
図4は、補正位置データリスト(A)103の一例である。図4で示したリスト中、横軸は基準局であり、基準局U1〜Unが予め設定されている。基準局U1〜Unは、計測台車102が走行するエリアの情報から予め抽出されている。あるいは、基準局を抽出しておく作業を省く場合は、演算処理の負担は増加するが、国土に設置されている全ての基準局を予め設定しておくことも可能である。補正位置データリスト(A)103の縦軸は時間(T1、T2、・・・、Tend)であり観測データ80を取得した時刻(イベント情報)が記録される。列方向には、同時刻(Ti)における各基準局Ujの補正情報で補正された位置情報(補正位置)の演算結果が並べられる。各列は、補正位置データセットAi(i=1〜end)として抽出可能である。例えば、補正位置データセットA2を抽出した場合は、時刻T2における、各基準局U1〜Unの補正情報により補正された計測台車102の位置情報を抽出できる。
【0018】
また、道路地物計測装置(計算機)100は、補正情報を計算に加えず観測データ80のみに基づき計測台車102の位置情報を計算する(単独測位)(ST02)。ここでは各基準局が保有する補正情報は計算に入れない。この観測データのみによる位置の計算結果を以下、単独測位結果を呼ぶ。
道路地物計測装置(計算機)100は、単独測位結果と基準局Uが設置されている設置場所の位置情報とから、各時刻(Ti)における計測台車102と各基準局Uiとの距離(基準局距離)を計算し、それらの結果を表にした基準局距離データリスト(B)104を作成する。
図5は、基準局距離データリスト(B)104の一例である。横軸は基準局Uj、縦軸は時間(T1、T2、・・・、Tend)であり、同時刻(Ti)における単独測位結果と各基準局Ujの位置との距離(基準局距離)Lijが列方向に並べられる。各列は、基準局距離データセットBi(i=1〜end)として抽出可能である。例えば、基準局距離データセットB2を抽出した場合は、時刻T2における、計測台車102の位置(単独測位結果)と各基準局U1〜Unとの距離L2j(j=1〜n)を抽出できる。
【0019】
次に、道路地物計測装置(計算機)100は複数基準点処理を実行する(ST03)。複数基準点処理の内容については次に説明する。道路地物計測装置(計算機)100は、この複数基準点処理により得られた結果を車両の位置と姿勢を表わす車両位置姿勢データとして取得する。
【0020】
ここで、複数基準点処理(ST03)について説明する。図6は、道路地物計測装置(計算機)100が行う複数基準点処理の処理フローであり、以下、図6に従い複数基準点処理のフローを説明する。
複数基準点処理を開始するにあたり、まず、ヒステリシス値Hをセットする(ST101)。このヒステリシス値Hとは、補正情報として使用する基準局Uを選択する際、直ぐに選択した基準局Uが変わったり、また元に戻ったりすることがないように、設定する値である。ヒステリシス値Hは計測毎に設定できるが、例えば5Kmなどの値を設定する。ヒステリシス値Hは記憶部(図示せず)に記憶される。
【0021】
道路地物計測装置(計算機)100は、基準局距離データリスト(B)104から一番早い測位時刻(T=T1)の基準局距離データセットB1を抽出する(ST102)。
また、道路地物計測装置(計算機)100は、補正位置データリスト(A)103から、同じ測位時刻(T=T1)の補正位置データセットA1を抽出する(ST103)。
道路地物計測装置(計算機)100は、時刻(T=T1)の基準局距離データセット(B1)の中から、計測台車102の位置(単独測位結果)から至近距離にある基準局(Ui)を抽出する。(ST104)。
道路地物計測装置(計算機)100は、ステップST104により至近距離として抽出された基準局Uiを指定基準局Usetに設定する(ST105)。
そして、道路地物計測装置(計算機)100は、測位時刻(T=T1)の補正位置データセットA1の中から、至近距離にあった当該基準局Uiの補正情報により補正した補正位置を抽出する(ST106)。
道路地物計測装置(計算機)100は、ST106により抽出した補正位置を、時刻T=T1における計測台車102の位置として定めて、車両位置姿勢データ115として格納する。
【0022】
このようにして最初の時刻T=T1における計測台車102の位置と指定基準局Usetを定めた後、道路地物計測装置(計算機)100は次の時刻(T=T2)における計測台車102の位置を演算する(ST108)。
道路地物計測装置(計算機)100は、基準局距離データリスト(B)104から測位時刻(T=T2)の基準局距離データセット(B2)を抽出する(ST109)。また、道路地物計測装置(計算機)100は、補正位置データリスト(A)103から、同じ測位時刻(T=T2)の補正位置データセットA2を抽出する(ST109)。
次に、道路地物計測装置(計算機)100は、基準局距離データセットB2において、先に指定した指定基準局(Uset)以外の基準局の基準局距離にヒステリシス値Hを加えた基準局距離データセットB2’を生成する(ST110)。
道路地物計測装置(計算機)100は、ヒステリシス値Hを加えた基準局距離データセットB2’の中から、基準局距離Lijが最も値の小さい基準局(Uj)を抽出する(ST111)。
道路地物計測装置(計算機)100は、ST111で抽出した基準局(Uj)を指定基準局に上書きする(ST112)。ステップS105で設定した最初の指定基準局と同じであればそのままとしておいてもよい。
道路地物計測装置(計算機)100は、補正位置データセットA2から、ステップS111で抽出した最も値の小さい基準局(Uj)における補正位置を抽出し(ST113)、抽出した補正位置を時刻T=T2における計測台車102の位置として定めて、車両位置姿勢データ115として格納する(ST114)。
【0023】
時刻T=T3以降の処理についても、時刻T=T2のときと同様の処理を行う。すなわち基準局距離データセット(B3)において、指定基準局Uset以外の基準局の基準局距離Lijにヒステリシス値Hを加算した基準局距離データセットB3’を生成する。生成した基準局距離データセットB3’において、基準局距離Lijが最も値の小さい基準局(Uj)を抽出する。そして、抽出した基準局(Uj)に対応する補正位置を補正位置データセットA3から抽出し、この補正位置を時刻T=T3における計測台車102の位置として定めて、車両位置姿勢データ115として格納する。指定基準局Usetには基準局距離データセットB3’において基準局距離Lijが最も小さかった(至近距離にある)基準局(Uj)を割り当てる。
このように、ヒステリシス値Hを加算した基準局距離データセットB3’の中から最も値の小さい基準局(Uj)を抽出することで、計測車両102が、隣接する基準局がカバーするエリアの継ぎ合わせの箇所を複数回行き来するような場合であっても、補正処理に使用する指定基準局Usetを頻繁に変えることが無くなり、計測結果に段差を生じることを抑えることができるようになる。
【0024】
時刻の最後T=Tendのデータセットまで処理が完了した時点で、道路地物計測装置(計算機)100は、演算処理を終了する(ST115)
【0025】
以上のように、実施の形態1の位置計測装置では、車両位置姿勢(3軸)演算部110は、計測台車102が計測走行して取得した観測データ80と、各基準局が保有する補正情報と、各基準局が設置されている位置情報とから、観測データ80を取得した時刻毎に、各基準局が各々保有する補正情報で単独測位結果を補正をした補正位置をリスト化した補正位置データリスト(A)と、同じく観測データ80を取得した時刻毎に、各基準局と各時刻における単独測位結果の位置との距離(基準局距離)をリスト化した基準局距離データリスト(B)を生成するようにした。そして、車両位置姿勢(3軸)演算部110は基準局の中に指定基準局Usetを設け、計測台車の位置は、指定基準局Usetが保有する補正情報により補正した位置情報を採用するようにした。指定基準局Usetの設定にあたっては、最初(T=T1)は補正位置データリスト(A)の中から至近距離にある基準局を指定基準局Usetと設定し、次の時刻(T=T2)以降は、基準局距離データリスト(B)において、指定基準局Uset以外の基準局の基準局距離にヒステリシス値Hを加算し、加算した基準局距離データリスト(A)の中から、至近距離にある基準局を抽出し、抽出した基準局を新たな指定基準局Usetにするとともに、当該抽出した基準局に対応する補正位置を補正位置データリスト(B)から抽出し、当該抽出した位置をその時刻における計測台車102の位置として定めるようにした。
これにより、従来から表示されていた計測結果の段差表示を少なくして、より精度の高い計測結果を表示することができる。
【0026】
実施の形態2.
実施の形態1では、至近距離にある基準局の補正情報で補正した位置を計測台車102の位置として定めていた。しかしながら標高差や局所的な電離層の影響によっては、至近距離にある基準局で誤差が大きく、遠方の基準局の方が高い位置精度を得られる場合がある。
そこで、実施の形態2では、実施の形態1において至近距離の基準局の補正情報を用いて定めた計測台車102の位置と、同時刻の他の補正位置データリスト(A)103で演算された補正位置とを比較し、計測台車102の位置が、同時刻の他の補正位置データリスト(A)103で演算された位置の平均値から所定の値以上の差があったときは、至近距離の基準局の補正情報を用いて定めた計測台車102の位置を棄却するような処理を行う。
これにより、明らかに誤った計測結果を棄却することができ、より信頼性の高い計測結果を表示することができる。
なお、上記では演算された位置の平均を求めて比較をしているが、その他、誤差の大きい位置を予め除外した後に平均を算出するなど、種々の方法により誤差の大きい結果を除外するようにしてもよい。
【0027】
実施の形態3.
実施の形態2では明らかに誤った計測結果を棄却するようにしたが、このような場合にあっては補正位置データリスト(B)から2番目に近い基準局を抽出し、当該抽出した基準局が保有する補正データで補正した位置を計測台車102の位置として定めるようにしてもよい。
これにより、明らかに誤った計測結果を棄却した場合であっても次善の結果を表示することができ、計測結果(測位結果)が表示されないエリアを縮小することができる。
【0028】
実施の形態4.
実施の形態1では至近距離にある基準局の補正情報で補正した位置を計測台車102の位置として定めていた。しかしながら至近距離にある基準局の補正情報を用いて測位計算を行った場合に、計測台車102と至近距離の基準局との間に遮蔽物などがあることでこの至近局では測位解が得られず、一方、距離が至近距離の基準局より若干遠くなる別の基準局では測位解が得られる場合がある。このような場合に、至近距離の基準局では計測台車102の位置が測位できなかったと判断して測位解なしの処理を行うことも可能であるが、別の基準局で得られた測位結果を利用したいという場合もある。なお、ここで測位解が得られないとは、いわゆる解がFixしない(Fix解が得られない)状態をいう。
【0029】
そこで、実施の形態4では、実施の形態1のように至近距離にある基準局の補正情報を用いて演算したところ測位解が得られなかった場合に、測位解が得られている別の基準局の測位解を計測台車102の位置として採用する処理を追加する。
具体的には、車両位置姿勢(3軸)演算部110は、実施の形態1の処理で至近距離の基準局の補正情報を用いて計測台車102の位置が得られなかったと判断すると、同時刻の他の補正位置データリスト(A)103の中で補正位置が得られているものがあるか否かを調べる。そして、補正位置が得られているものがあると分かった場合に、基準局距離データリスト(B)104を参照し、補正位置が得られている基準局の中で最も近い距離にある基準局を抽出し、その基準局における補正位置を補正位置データリスト(A)103から抽出して計測台車102の位置として採用する。
【0030】
これにより、測位率を全体として向上することができ、次善の結果を表示することができることで計測結果(測位結果)が全く表示されないというエリアを縮小することができる。
【0031】
なお、補正位置が得られている基準局の中で最も近い距離にある基準局を抽出した場合に、その基準局までの距離と、測位解が得られなかった至近距離にある基準局までの距離との差分を計算し、その差分が予め定めた所定の距離より大きい場合には計測台車102の位置の測位結果は無し(解なし)と判断する処理を実行するようにしてもよい。
これにより、計測結果(測位結果)が全く表示されないというエリアを縮小しながら、計測結果の信頼性も向上させることができる。
【符号の説明】
【0032】
10 誤差平面、20 誤差平面、80 観測データ、100 道路地物計測装置(計算機)、102 計測台車、103 補正位置データリスト(A)、104 基準局距離データリスト(B)、110 車両位置姿勢(3軸)演算部、115 車両位置姿勢データ、200 オドメトリ装置、210 ジャイロ、220 GPS。
【特許請求の範囲】
【請求項1】
GPS(Global Positioning System)を搭載した移動体が、複数の基準局で各々有する測位に関する補正情報のカバーエリアを走行中にGPS衛星から観測した観測データと、前記複数の基準局の各々が有する前記補正情報とを用いて前記移動体が走行した走行位置を算出する車両位置演算装置であって、
前記車両位置演算装置は、予め定められたヒステリシス値を記憶する記憶部を備え、
前記車両位置演算装置は、前記観測データを用いて単独測位された前記移動体の単独測位位置から前記複数の基準局の中で予め指定された指定基準局までの距離と、前記移動体の単独測位位置から前記指定基準局以外の基準局までの距離に前記ヒステリシス値を加算した距離と、の中から最も近い距離にある基準局を抽出し、当該基準局を指定基準局に新たに設定するとともに当該基準局が有する補正情報と前記観測データとに基づき前記移動体の走行位置を算出することを特徴とする車両位置演算装置。
【請求項2】
前記最も近い距離にある基準局が有する補正情報を用いて測定した前記移動体の位置に誤差が大きいと判断したときは、算出した前記移動体の走行位置から当該誤差の大きい位置の結果を削除することを特徴とする請求項1記載の車両位置演算装置。
【請求項3】
前記最も近い距離にある基準局が有する補正情報を用いて測定した前記移動体の位置と、前記最も近い距離にある基準局以外の各基準局において当該基準局が有する補正情報を用いて測定した移動体の位置の平均をとった平均の位置とが、所定の距離以上離れている場合に前記誤差が大きいと判断することを特徴とする請求項2記載の車両位置演算装置。
【請求項4】
前記最も近い距離にある基準局が有する補正情報を用いて測定した結果、前記移動体の位置が算出できなかったと判断したときに、前記移動体の位置が算出できた基準局の中で最も近い距離にある基準局が有する補正情報を用いて測定した位置を前記移動体の位置と判断することを特徴とする請求項1記載の車両位置演算装置。
【請求項5】
前記移動体の位置が算出できなかった最も近い距離にある基準局までの距離と、前記移動体の位置が算出できた基準局の中で最も近い距離にある基準局までの距離との差が所定の距離以上である場合に、前記移動体の位置は解なしと判断することを特徴とする請求項4記載の車両位置演算装置。
【請求項1】
GPS(Global Positioning System)を搭載した移動体が、複数の基準局で各々有する測位に関する補正情報のカバーエリアを走行中にGPS衛星から観測した観測データと、前記複数の基準局の各々が有する前記補正情報とを用いて前記移動体が走行した走行位置を算出する車両位置演算装置であって、
前記車両位置演算装置は、予め定められたヒステリシス値を記憶する記憶部を備え、
前記車両位置演算装置は、前記観測データを用いて単独測位された前記移動体の単独測位位置から前記複数の基準局の中で予め指定された指定基準局までの距離と、前記移動体の単独測位位置から前記指定基準局以外の基準局までの距離に前記ヒステリシス値を加算した距離と、の中から最も近い距離にある基準局を抽出し、当該基準局を指定基準局に新たに設定するとともに当該基準局が有する補正情報と前記観測データとに基づき前記移動体の走行位置を算出することを特徴とする車両位置演算装置。
【請求項2】
前記最も近い距離にある基準局が有する補正情報を用いて測定した前記移動体の位置に誤差が大きいと判断したときは、算出した前記移動体の走行位置から当該誤差の大きい位置の結果を削除することを特徴とする請求項1記載の車両位置演算装置。
【請求項3】
前記最も近い距離にある基準局が有する補正情報を用いて測定した前記移動体の位置と、前記最も近い距離にある基準局以外の各基準局において当該基準局が有する補正情報を用いて測定した移動体の位置の平均をとった平均の位置とが、所定の距離以上離れている場合に前記誤差が大きいと判断することを特徴とする請求項2記載の車両位置演算装置。
【請求項4】
前記最も近い距離にある基準局が有する補正情報を用いて測定した結果、前記移動体の位置が算出できなかったと判断したときに、前記移動体の位置が算出できた基準局の中で最も近い距離にある基準局が有する補正情報を用いて測定した位置を前記移動体の位置と判断することを特徴とする請求項1記載の車両位置演算装置。
【請求項5】
前記移動体の位置が算出できなかった最も近い距離にある基準局までの距離と、前記移動体の位置が算出できた基準局の中で最も近い距離にある基準局までの距離との差が所定の距離以上である場合に、前記移動体の位置は解なしと判断することを特徴とする請求項4記載の車両位置演算装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2011−203161(P2011−203161A)
【公開日】平成23年10月13日(2011.10.13)
【国際特許分類】
【出願番号】特願2010−71825(P2010−71825)
【出願日】平成22年3月26日(2010.3.26)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成23年10月13日(2011.10.13)
【国際特許分類】
【出願日】平成22年3月26日(2010.3.26)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]