
車両制御システム及び制御装置
【課題】ドライバビリティの低下を抑制しつつ、燃費の向上を図ることができる車両制御システム及び制御装置を提供する。
【解決手段】エンジン及びモータジェネレータと、エンジン又はモータジェネレータからの動力を変速して出力する変速機本体と、エンジン、モータジェネレータ及び変速機本体を制御する制御装置と、を備えた車両制御システムであって、制御装置は、エンジンの始動頻度が少ない第1走行モードと、第1走行モードに比してエンジンの始動頻度が多い第2走行モードとを切り替えるモード切替制御と、第1走行モードおよび第2走行モードにおいて、変速マップMに基づく変速機本体の変速制御を実行し、第1走行モードにおいてモータジェネレータの動力で走行するP−EV走行時の変速線(第1変速線L1)と、第2走行モードにおいてモータジェネレータの動力で走行するE−EV走行時の変速線(第2変速線L2)とは異なっている。
【解決手段】エンジン及びモータジェネレータと、エンジン又はモータジェネレータからの動力を変速して出力する変速機本体と、エンジン、モータジェネレータ及び変速機本体を制御する制御装置と、を備えた車両制御システムであって、制御装置は、エンジンの始動頻度が少ない第1走行モードと、第1走行モードに比してエンジンの始動頻度が多い第2走行モードとを切り替えるモード切替制御と、第1走行モードおよび第2走行モードにおいて、変速マップMに基づく変速機本体の変速制御を実行し、第1走行モードにおいてモータジェネレータの動力で走行するP−EV走行時の変速線(第1変速線L1)と、第2走行モードにおいてモータジェネレータの動力で走行するE−EV走行時の変速線(第2変速線L2)とは異なっている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両制御システム及び制御装置に関する。
【背景技術】
【0002】
従来、エンジンと、エンジンに接続された動力分配統合機構と、動力分配統合機構に接続されたモータと、変速機を介して動力分配統合機構に接続されたモータと、車両を制御する電子制御ユニットとを備えたハイブリッド自動車が知られている(例えば、特許文献1参照)。このハイブリッド自動車は、エンジンを運転しているときに、エンジンを運転している状態で車両全体の効率が良好となるようにモータの回転数を変速して駆動軸に伝達する変速機の変速状態を設定したエンジン運転時変速マップを用いて、変速機のギヤの状態を切り替えている。一方、ハイブリッド自動車は、エンジンを運転していないときに、エンジンの運転を停止した状態で走行する際に車両全体の効率が良好となるよう変速機の変速状態を設定したモータ走行時変速マップを用いて、変速機のギヤの状態を切り替えている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−170317号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、ハイブリッド自動車等の車両は、エンジンの始動頻度を少なくしモータでの走行を優先する第1走行モードと、電気モータでの走行を優先せずにエンジン及びモータで走行する第2走行モードとを切り替えて走行する場合がある。車両は、第2走行モードである場合、モータの動力のみで走行するEV走行と、エンジン及びモータの動力で走行するHV走行とを適宜切り替える。一方、車両は、第1走行モードである場合、モータでの走行を優先していることから、第2走行モードに比してEV走行とHV走行との切り替え頻度は少ない。
【0005】
ここで、EV走行とHV走行との切り替え頻度が多い第2走行モードにおいて、従来のように、EV走行とHV走行との切り替えに応じて変速マップを切り替えると、車両は、変速機の変速比を変更する頻度が多くなる。このとき、エンジンの始動と変速比の変更とが同時に発生すると、車両の変動が大きくなり、ドライバビリティが悪化する虞がある。このため、第1走行モード及び第2走行モードにおいて、EV走行とHV走行とで同一の変速マップを用いることが考えられるが、この場合、EV走行とHV走行とで同一の変速マップを用いると、EV走行時におけるモータの作動効率、又はHV走行時におけるエンジンの作動効率が低下する虞があり、燃費の向上を図ることが困難となる。
【0006】
本発明は、上記の事情に鑑みてなされたものであって、ドライバビリティの低下を抑制しつつ、燃費の向上を図ることができる車両制御システム及び制御装置を提供することを課題とする。
【課題を解決するための手段】
【0007】
本発明の車両制御システムは、車両の動力源となる内燃機関及び電動機と、内燃機関又は電動機からの動力を変速して出力する自動変速機と、内燃機関、電動機及び自動変速機を制御する制御装置と、を備えた車両制御システムであって、制御装置は、内燃機関の始動頻度が少ない車両の走行モードである第1走行モードと、第1走行モードに比して内燃機関の始動頻度が多い車両の走行モードである第2走行モードとを切り替えるモード切替制御と、第1走行モードにおいて、第1変速パターンに基づく自動変速機の変速制御と、第2走行モードにおいて、第2変速パターンに基づく自動変速機の変速制御と、を実行し、第1走行モードにおいて電動機の動力で走行する第1EV走行時の第1変速パターンと、第2走行モードにおいて電動機の動力で走行する第2EV走行時の第2変速パターンとは、異なっていることを特徴とする。
【0008】
また、第1走行モードにおいて内燃機関の動力及び電動機の動力で走行する第1HV走行時の第1変速パターンと、第2走行モードにおいて内燃機関の動力及び電動機の動力で走行する第2HV走行時の第2変速パターンとは、同じであることが好ましい。
【0009】
また、第2EV走行時の第2変速パターンと、第2走行モードにおいて内燃機関の動力及び電動機の動力で走行する第2HV走行時の第2変速パターンとは、同じであることが好ましい。
【0010】
また、第1EV走行時の第1変速パターンは、第2EV走行時の第2変速パターンを選択した場合に比して、電動機の回転数が高くなる変速パターンであることが好ましい。
【0011】
また、自動変速機は、有段変速機であり、制御装置は、変速線に基づいて変速制御を実行し、第1変速パターンは、第1EV走行時の第1変速線を有し、第2変速パターンは、第2EV走行時の第2変速線を有し、第1変速線は、第2変速線に比して、高車速側でアクセル開度の小さい側となっていることが好ましい。
【0012】
また、自動変速機は、無段変速機であり、第1EV走行時の第1変速パターンは、第2EV走行時の第2変速パターンを選択した場合に比して、変速比が大きくなる変速パターンであることが好ましい。
【0013】
本発明の制御装置は、車両の動力源となる内燃機関及び電動機と、内燃機関又は電動機からの動力を変速して出力する自動変速機と、を制御する制御装置であって、内燃機関の始動頻度が少ない車両の走行モードである第1走行モードと、第1走行モードに比して内燃機関の始動頻度が多い車両の走行モードである第2走行モードとを切り替えるモード切替制御と、第1走行モードにおいて、第1変速パターンに基づく自動変速機の変速制御と、第2走行モードにおいて、第2変速パターンに基づく自動変速機の変速制御と、を実行し、第1走行モードにおいて電動機の動力で走行する第1EV走行時の第1変速パターンと、第2走行モードにおいて電動機の動力で走行する第2EV走行時の第2変速パターンとは、異なっていることを特徴とする。
【発明の効果】
【0014】
本発明に係る車両制御システム及び制御装置は、ドライバビリティの低下を抑制しつつ、燃費の向上を図ることができるという効果を奏する。
【図面の簡単な説明】
【0015】
【図1】図1は、実施形態に係る車両制御システムの概略構成図である。
【図2】図2は、実施形態に係る車両制御システムを搭載した車両の走行モード及び走行状態を表す説明図である。
【図3】図3は、実施形態に係る車両制御システムのECUに記憶された変速マップの説明図である。
【図4】図4は、実施形態に係る車両制御システムのECUにより変速線を選択する制御動作のフローチャートである。
【発明を実施するための形態】
【0016】
以下に、本発明に係る実施形態を図面に基づいて詳細に説明する。なお、この実施形態によりこの発明が限定されるものではない。また、下記実施形態における構成要素には、当業者が置換可能かつ容易なもの、或いは実質的に同一のものが含まれる。
【0017】
[実施形態]
図1は、実施形態に係る車両制御システムの概略構成図である。図2は、実施形態に係る車両制御システムを搭載した車両の走行モード及び走行状態を表す説明図である。図3は、実施形態に係る車両制御システムのECUに記憶された変速マップの説明図である。図4は、実施形態に係る車両制御システムのECUにより変速線を選択する制御動作のフローチャートである。
【0018】
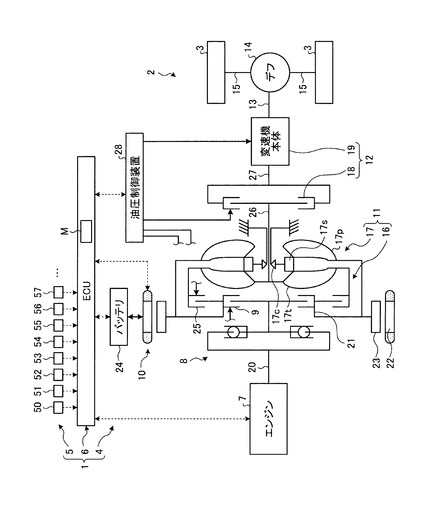
本実施形態は、1つのモータジェネレータと自動変速機、典型的には、有段自動変速機を備えたいわゆる1MG+AT型のパラレルハイブリッド形式の車両制御システムである。本実施形態の車両制御システム1は、図1に示すように、車両2に搭載され、この車両2を制御するためのシステムである。車両2は、車両2を走行させる動力源(走行用駆動源)として、内燃機関としてのエンジン7と、電動機としてのモータジェネレータ10とを搭載した、いわゆる「ハイブリッド車両」である。より詳細には、車両2は、差込プラグを介して供給される電力を蓄電可能なバッテリ24を備えた「プラグインハイブリッド車両」である。
【0019】
車両制御システム1は、車両2の駆動輪3を駆動する駆動装置4と、車両2の状態を検出する状態検出装置5と、駆動装置4を含む車両2の各部を制御する制御装置としてのECU6とを備える。
【0020】
駆動装置4は、車両2においてパラレルハイブリッド形式のパワートレーンを構成し、1つのエンジン7と、1つのモータジェネレータ10とを有し、これらにより駆動輪3を回転駆動するものである。
【0021】
駆動装置4は、エンジン7と、ダンパ機構8と、K0クラッチ9と、モータジェネレータ10とを備える。さらに、駆動装置4は、トルクコンバータ11と、変速機12と、プロペラ軸13と、デファレンシャルギヤ14と、ドライブ軸15とを備える。また、トルクコンバータ11は、ロックアップ機構16と、流体伝達機構17とを含んで構成されたロックアップ機構付トルクコンバータである。変速機12は、C1クラッチ18と、変速機本体19とを含んで構成される。
【0022】
この駆動装置4は、各構成要素が駆動輪3への動力の伝達経路に対して、エンジン7、ダンパ機構8、K0クラッチ9、モータジェネレータ10、トルクコンバータ11のロックアップ機構16、流体伝達機構17、変速機12のC1クラッチ18、変速機本体19、プロペラ軸13、デファレンシャルギヤ14、ドライブ軸15の順で相互に動力伝達可能に配置される。この場合、駆動装置4は、エンジン7の出力軸であるクランク軸20とモータジェネレータ10の出力軸であるロータ軸21とがダンパ機構8、K0クラッチ9を介して連結される。さらに、駆動装置4は、ロータ軸21と駆動輪3とがトルクコンバータ11、変速機12、プロペラ軸13、デファレンシャルギヤ14、ドライブ軸15等を介して連結される。
【0023】
より詳細には、エンジン7は、燃焼室で燃料を燃焼させることにより燃料のエネルギを機械的仕事に変換して動力として出力する熱機関である。エンジン7は、燃料の燃焼に伴ってクランク軸20に機械的な動力(エンジントルク)を発生させ、この機械的動力をクランク軸20から出力可能である。また、このエンジン7は、車両2の停車中、走行中にかかわらず、作動状態と非作動状態とを切り替え可能である。
【0024】
ここで、エンジン7の作動状態(エンジン7を作動させた状態)とは、駆動輪3に作用させる動力を発生する状態であり、燃焼室で燃料を燃焼して生じる熱エネルギをトルクなどの機械的エネルギの形で出力する状態である。つまり、エンジン7は、作動状態では燃焼室で燃料を燃焼させて車両2の駆動輪3に作用させる動力を発生する。一方、エンジン7の非作動状態、すなわち、エンジン7の作動を停止させた状態とは、動力の発生を停止した状態であり、燃焼室への燃料の供給をカットし(フューエルカット)、燃焼室で燃料を燃焼させずトルクなどの機械的エネルギを出力しない状態である。
【0025】
K0クラッチ9は、エンジン7のクランク軸20とモータジェネレータ10のロータ軸21とをダンパ機構8を介して連結可能である。K0クラッチ9は、クランク軸20とロータ軸21とを動力伝達可能に係合した係合状態と、この係合を解除した解放状態と、係合状態と解放状態との間のスリップ状態とに切り替え可能である。K0クラッチ9は、係合状態となることで、クランク軸20とロータ軸21とをダンパ機構8を介して一体回転可能に連結し、エンジン7とモータジェネレータ10との間での動力伝達が可能な状態となる。一方、K0クラッチ9は、解放状態となることでクランク軸20とロータ軸21とを切り離しエンジン7とモータジェネレータ10との間での動力伝達が遮断された状態となる。
【0026】
K0クラッチ9は、種々のクラッチを用いることができ、例えば、湿式多板クラッチや乾式単板クラッチ等の摩擦式ディスククラッチ装置を用いることができる。ここでは、K0クラッチ9は、例えば、K0クラッチ9に供給される作動油の油圧であるクラッチ油圧に応じて作動する油圧式の装置である。K0クラッチ9は、クラッチ油圧に応じた係合力(クラッチ板を係合する押圧力)が0である場合に係合が完全に解除された解放状態となり、係合力が大きくなるにしたがってスリップ状態(半係合状態)を経て完全に係合した係合状態となる。K0クラッチ9における伝達トルクは、解放状態では0であり、スリップ状態では係合力に応じた大きさとなり、係合状態では最大となる。なお、以下で説明するC1クラッチ18、ロックアップクラッチ25についてもこのK0クラッチ9とほぼ同様である。
【0027】
モータジェネレータ10は、例えば、交流同期電動機等である。モータジェネレータ10は、固定子としてのステータ22がケース等に固定され、回転子としてのロータ23がステータ22の径方向内側に配置されてロータ軸21に一体回転可能に結合される。モータジェネレータ10は、インバータなどを介してバッテリ24から供給された電力を機械的動力に変換する電動機としての機能(力行機能)と、入力された機械的動力を電力に変換しインバータなどを介してバッテリ24に充電する発電機としての機能(回生機能)とを兼ね備えた回転電機である。モータジェネレータ10は、例えば、バッテリ24からインバータを介して交流電力の供給を受けて駆動し、ロータ軸21に機械的な動力(モータトルク)を発生させ、この機械的動力をロータ軸21から出力可能である。
【0028】
トルクコンバータ11は、流体継手の一種であり、モータジェネレータ10のロータ軸21に連結される。トルクコンバータ11は、エンジン7又はモータジェネレータ10からの動力を、ロックアップクラッチ25を介して伝達するロックアップ機構16と、作動油を介して伝達する流体伝達機構17とを有する。ロックアップ機構16は、ロックアップクラッチ25を介してロータ軸21とトルクコンバータ11の出力軸26とを連結可能である。流体伝達機構17は、ポンプ(ポンプインペラ)17p、タービン(タービンランナ)17t、ステータ17s、ワンウェイクラッチ17c等を含んで構成され、内部に作動流体としての作動油が充填される。ポンプ17pは、ロータ軸21と一体回転可能に連結され、タービン17tは、出力軸26と一体回転可能に連結される。ロックアップクラッチ25は、ロータ軸21とタービン17tとを動力伝達可能に係合した係合状態と、この係合を解除した解放状態と、係合状態と解放状態との間のスリップ状態とに切り替え可能である。トルクコンバータ11は、エンジン7又はモータジェネレータ10からの動力を、ロックアップクラッチ25の状態に応じて、ロックアップ機構16、又は、流体伝達機構17を介して出力軸26に伝達し、この出力軸26から出力することができる。
【0029】
変速機12は、上述したように、C1クラッチ18と変速機本体19とを含んで構成され、トルクコンバータ11からの動力を変速して駆動輪3側に出力するものである。C1クラッチ18は、トルクコンバータ11の出力軸26と駆動輪3とを変速機本体19、プロペラ軸13、デファレンシャルギヤ14、ドライブ軸15等を介して連結可能である。ここでは、C1クラッチ18は、トルクコンバータ11の出力軸26と変速機本体19の入力軸27とを動力伝達可能に係合した係合状態と、この係合を解除した解放状態と、係合状態と解放状態との間のスリップ状態とに切り替え可能である。
【0030】
変速機本体19は、例えば、有段自動変速機(AT)、無段自動変速機(CVT)、マルチモードマニュアルトランスミッション(MMT)、シーケンシャルマニュアルトランスミッション(SMT)、デュアルクラッチトランスミッション(DCT)などのいわゆる自動変速機である。ここでは、変速機本体19は、例えば、それぞれに所定の変速比が割り当てられた複数の変速段(ギヤ段)を含んで構成される有段自動変速機が適用される。変速機本体19は、トルクコンバータ11の出力軸26からC1クラッチ18を介して入力軸27に入力された動力を所定の変速段(変速比)で変速して出力軸に伝達し、この出力軸に一体回転可能に結合されるプロペラ軸13に出力する。
【0031】
デファレンシャルギヤ14は、プロペラ軸13からの動力を、各ドライブ軸15を介して各駆動輪3に伝達する。デファレンシャルギヤ14は、車両2が旋回する際に生じる旋回の中心側、つまり内側の駆動輪3と、外側の駆動輪3との回転速度の差を吸収する。
【0032】
上記のように構成される駆動装置4は、エンジン7が発生させた動力をクランク軸20からダンパ機構8、K0クラッチ9、ロータ軸21、トルクコンバータ11、変速機12、プロペラ軸13、デファレンシャルギヤ14、ドライブ軸15を介して駆動輪3に伝達することができる。また、駆動装置4は、モータジェネレータ10が発生させた動力をロータ軸21から、K0クラッチ9を介さずに、トルクコンバータ11、変速機12、プロペラ軸13、デファレンシャルギヤ14、ドライブ軸15を介して駆動輪3に伝達することができる。この結果、車両2は、駆動輪3と路面との接地面に駆動力を生じさせ、これにより走行することができる。
【0033】
状態検出装置5は、車両2の状態を検出するものであり、車両2の状態を表す種々の状態量や物理量、スイッチ類の作動状態等を検出するものである。状態検出装置5は、ECU6と電気的に接続されており、相互に検出信号や駆動信号、制御指令等の情報の授受を行うことができる。状態検出装置5は、例えば、アクセル開度センサ50、ブレーキセンサ51、車速センサ52、クランク角センサ53、モータ回転数センサ54、タービン回転数センサ55、プロペラ回転数センサ56、充電状態検出器57等を含む。アクセル開度センサ50は、運転者による車両2のアクセルペダルの操作量(アクセル操作量、加速要求操作量)に相当するアクセル開度を検出する。ブレーキセンサ51は、運転者による車両2のブレーキペダルの操作量(ブレーキ操作量、制動要求操作量)に相当するマスタシリンダ圧、あるいは、ブレーキ踏力等を検出する。車速センサ52は、車両2の走行速度である車速を検出する。クランク角センサ53は、クランク軸20の回転角度であるクランク角度を検出する。ECU6は、このクランク角度に基づいて、エンジン7の各気筒における吸気行程、圧縮行程、膨張行程、排気行程を判別すると共に、クランク軸20の回転数(回転速度)であるエンジン回転数を算出することができる。モータ回転数センサ54は、モータジェネレータ10のロータ軸21の回転数であるモータ回転数を検出する。タービン回転数センサ55は、トルクコンバータ11のタービン17tの回転数であり、トルクコンバータ11の出力軸26の回転数であるタービン回転数、およびC1クラッチ18の係合時における変速機本体19の入力軸27の回転数である入力回転数を検出する。プロペラ回転数センサ56は、変速機本体19の出力軸となるプロペラ軸13の回転数であるプロペラ回転数を検出する。充電状態検出器57は、バッテリ24の蓄電量(充電量)やバッテリ電圧等に応じた蓄電状態SOCを検出する。
【0034】
ECU6は、車両制御システム1の全体の制御を統括的に行い、エンジン7やモータジェネレータ10等を協調して制御するための制御ユニットである。ECU6は、CPU、ROM、RAM及びインターフェースを含む周知のマイクロコンピュータを主体とする電子回路である。ECU6は、状態検出装置5が電気的に接続され、また、エンジン7の燃料噴射装置、点火装置、スロットル装置、モータジェネレータ10のインバータ、バッテリ24等が電気的に接続される。さらに、ECU6は、K0クラッチ9、ロックアップクラッチ25、C1クラッチ18及び変速機本体19等に油圧制御装置28を介して接続され、油圧制御装置28を介してこれらの動作を制御する。ECU6は、状態検出装置5が検出した検出結果に対応した電気信号が入力され、入力された検出結果に応じてエンジン7、モータジェネレータ10のインバータ、油圧制御装置28等の駆動装置4の各部に駆動信号を出力しこれらの駆動を制御する。
【0035】
ここで、油圧制御装置28は、作動流体としての作動油(オイル)の油圧によって、変速機本体19の変速動作やK0クラッチ9、ロックアップクラッチ25、C1クラッチ18等の係合要素の係合・解放・スリップ動作を制御するものである。油圧制御装置28は、ECU6により制御される種々の公知の油圧制御回路を含んで構成され、例えば、複数の油路、オイルリザーバ、オイルポンプ、複数の電磁弁などを含んで構成される。油圧制御装置28は、ECU6からの信号に応じて、駆動装置4の各部に供給される作動油の流量あるいは油圧を制御する。
【0036】
ECU6は、例えば、アクセル開度、車速等に基づいてエンジン7のスロットル装置を制御し、吸気通路のスロットル開度を調節し、吸入空気量を調節して、その変化に対応して燃料噴射量を制御し、燃焼室に充填される混合気の量を調節してエンジン7の出力を制御する。また、ECU6は、例えば、アクセル開度、車速等に基づいて油圧制御装置28を制御し、変速機本体19の変速動作やK0クラッチ9、ロックアップクラッチ25、C1クラッチ18等の係合・解放・スリップ動作等を制御する。
【0037】
また、ECU6には、変速機本体19の変速制御を実行するために用いられる変速マップMが記憶されている。ECU6は、タービン回転数センサ55により検出される変速機本体19の入力軸27の回転数、およびプロペラ回転数センサ56により検出されるプロペラ軸13(変速機本体19の出力軸)の回転数を取得し、変速マップMに基づいて、変速機本体19の変速比を変更することで、変速機本体19の入力軸27の回転数および出力軸の回転数を所定の回転数にそれぞれ制御する。
【0038】
上記のように構成される車両制御システム1は、ECU6が駆動装置4を制御し、エンジン7とモータジェネレータ10とを併用又は選択使用することで、車両2を様々な走行モードおよび走行状態で走行させることができる。
【0039】
先ずは、車両2の走行状態について説明する。ECU6は、例えば、K0クラッチ9を係合状態(K0クラッチON)としかつエンジン7を作動させ、走行用駆動源であるエンジン7とモータジェネレータ10とのうちエンジン7から出力する動力(エンジントルク)のみを駆動輪3に伝達させる。このとき、C1クラッチ18は、係合状態(C1クラッチON)となっている。これにより、車両制御システム1は、「エンジン走行」を実現することができる(図示省略)。したがって、車両2は、走行用駆動源のうちエンジン7のみを用いて走行することができる。
【0040】
また、ECU6は、例えば、上記のようにK0クラッチ9を係合状態(K0クラッチON)としかつエンジン7を作動させた状態で、要求駆動力やバッテリ24の蓄電状態SOCに応じてモータジェネレータ10を力行させ、エンジン7から出力する動力と、モータジェネレータ10から出力する動力(モータトルク)とを統合して駆動輪3に伝達させる。このとき、C1クラッチ18は、係合状態(C1クラッチON)となっている。これにより、車両制御システム1は、「HV走行」を実現することができる。したがって、車両2は、エンジン7とモータジェネレータ10とを併用して走行することができる。
【0041】
さらに、ECU6は、例えば、K0クラッチ9を解放状態(K0クラッチOFF)としかつエンジン7を停止し非作動状態とした上で、モータジェネレータ10を力行させ、走行用駆動源であるエンジン7とモータジェネレータ10とのうちモータジェネレータ10から出力する動力のみを駆動輪3に伝達させる。このとき、C1クラッチ18は、係合状態(C1クラッチON)となっている。また、エンジン7は、非作動状態でありかつK0クラッチ9が解放状態であるから、クランク軸20の回転も停止している。これにより、車両制御システム1は、「EV走行」を実現することができる。したがって、車両2は、走行用駆動源のうちモータジェネレータ10のみを用いて走行することができる。このとき、車両2は、基本的にはクランク軸20とロータ軸21とがK0クラッチ9にて機械的に切り離された状態となり、エンジン7の回転抵抗が作用しない状態となる。
【0042】
また、ECU6は、例えば、車両2の減速走行時に、モータジェネレータ10を制御し、駆動輪3からロータ軸21に伝達される動力によってモータジェネレータ10にて回生により発電し、これに伴ってロータ軸21に生じる機械的動力(負のモータトルク)を駆動輪3に伝達する。このとき、C1クラッチ18は、係合状態(C1クラッチON)となっている。これにより、車両制御システム1は、「回生走行」を実現することができる(図示省略)。したがって、車両2は、モータジェネレータ10により回生制動されて減速走行することができる。
【0043】
続いて、車両2の走行モードについて説明する。ECU6は、エンジン7の始動頻度が少なくモータジェネレータ10を優先して作動させる第1走行モードを実行可能となっている。第1走行モードは、プラグインハイブリッド車両2において、主にバッテリ24に充電された電力を用いて走行するモードである。
【0044】
また、ECU6は、第1走行モードに比してエンジン7の始動頻度が多くモータジェネレータ10での走行を優先しない第2走行モードを実行可能となっている。第2走行モードは、プラグインハイブリッド車両2において、例えば、バッテリ24の蓄電量が少ない場合に、エンジン7の動力を用いて走行するモードである。
【0045】
そして、ECU6は、第1走行モードと第2走行モードとを切り替えるモード切替制御を実行する。ECU6は、モード切替制御を実行すると、充電状態検出器57の検出結果に基づいて、第1走行モードと第2走行モードとを切り替える。具体的に、ECU6は、充電状態検出器57によるバッテリ24の蓄電量が、予め設定された所定の蓄電量よりも大きい場合、第1走行モードを実行する。一方、ECU6は、充電状態検出器57によるバッテリ24の蓄電量が、予め設定された所定の蓄電量以下である場合、第2走行モードを実行する。
【0046】
なお、本実施形態において、ECU6は、バッテリ24の蓄電量に基づいて、第1走行モードと第2走行モードとの切り替えを実行したが、この構成に限定されない。例えば、走行モードを切り替える切替スイッチを別途設け、ECU6が、切替スイッチの操作を検出することで、第1走行モードと第2走行モードとを切り替えてもよい。
【0047】
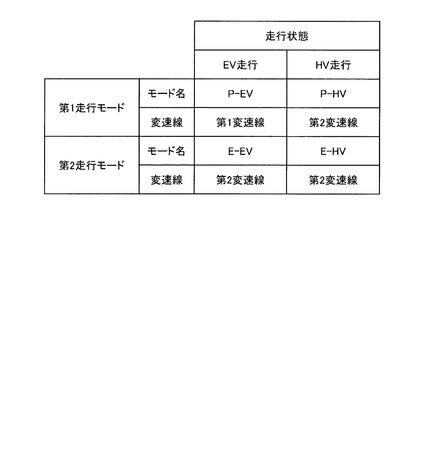
次に、図2を参照し、車両2の走行モードと走行状態とについて説明する。ここで、第1走行モードにおけるEV走行を、P−EV走行(第1EV走行)とし、第1走行モードにおけるHV走行を、P−HV走行(第1HV走行)としている。また、第2走行モードにおけるEV走行を、E−EV走行(第2EV走行)とし、第2走行モードにおけるHV走行を、E−HV走行(第2HV走行)としている。
【0048】
ECU6は、第1走行モードにおけるP−EV走行とP−HV走行との走行状態の切替を、例えば、アクセル開度及び車速に基づいて実行している。つまり、ECU6は、第1走行モードにおいて、車速センサ52によって検出された車速が所定の車速である場合、アクセル開度センサ50によって検出されたアクセル開度が、所定のアクセル開度以下であると、車両2の走行状態がP−EV走行となるように制御する。一方、ECU6は、第1走行モードにおいて、車速センサ52によって検出された車速が所定の車速である場合、アクセル開度センサ50によって検出されたアクセル開度が、所定のアクセル開度よりも大きいと、車両2の走行状態がP−HV走行となるように制御する。具体的に、低車速時の場合における所定のアクセル開度としては60%であり、高車速時の場合における所定のアクセル開度としては40%である。
【0049】
なお、本実施形態において、ECU6は、第1走行モードにおけるP−EV走行とP−HV走行との走行状態の切替を、アクセル開度に基づいて行ったが、この構成に限定されない。例えば、ECU6は、車両2に対して要求された要求駆動力に基づいて、P−EV走行とP−HV走行との走行状態の切替を行ってもよい。
【0050】
また、ECU6は、第2走行モードにおけるE−EV走行とE−HV走行との走行状態の切替を、第1走行モードと同様に、アクセル開度及び車速に基づいて実行している。このとき、ECU6は、所定のアクセル開度が第1走行モードに比して小さい値となるように設定されている。また、ECU6は、第2走行モードにおけるE−EV走行とE−HV走行との走行状態の切替を、充電状態検出器57の検出結果に基づいて実行することもできる。つまり、ECU6は、充電状態検出器57で検出したバッテリ24の蓄電量が、予め設定された所定の蓄電量よりも大きい場合、E−EV走行を実行する。一方、ECU6は、充電状態検出器57で検出したバッテリ24の蓄電量が、予め設定された所定の蓄電量以下である場合、E−HV走行を実行する。このため、第2走行モードは、第1走行モードに比してEV走行とHV走行との切替が多くなり、第1走行モードに比してエンジン7の始動頻度が多くなる。
【0051】
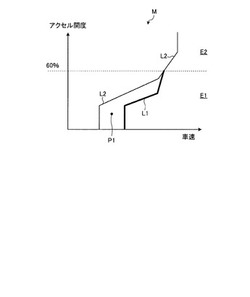
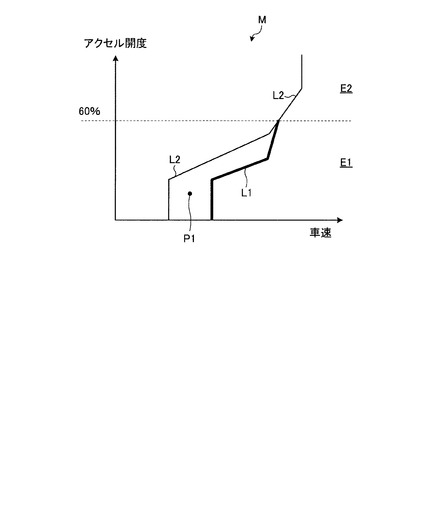
また、ECU6は、第1走行モード及び第2走行モードにおいて、変速マップMに基づく変速制御を実行している。ここで、図3を参照し、変速マップMについて説明する。変速マップMは、その横軸が車速となっており、その縦軸がアクセル開度となっている。変速マップMには、P−EV走行領域E1とP−HV走行領域E2とが設定されている。P−EV走行領域E1は、所定のアクセル開度以下となる領域であり、P−HV走行領域E2は、所定のアクセル開度よりも大きくなる領域である。なお、この変速マップMは、低車速側における変速マップであり、所定のアクセル開度として、例えば60%が設定されている。このため、上記したように、高車速側の変速マップMでは、所定のアクセル開度として40%を設定してもよい。
【0052】
また、変速マップMは、変速機本体19の複数の変速段を切り替えるための複数の変速線を有している。ECU6は、変速マップMに基づく変速制御を実行すると、アクセル開度センサ50で検出されたアクセル開度と、車速センサ52で検出された車速とに基づいて、変速マップM上における車両2の動作点の位置から、所定の変速段を設定する。そして、ECU6は、設定された変速段となるように、変速機本体19の変速制御を実行する。また、車両2の走行状態に応じて車両2の動作点が変更される際、車両2の動作点が変速線を超えて(跨いで)変更されると異なる変速段となるため、ECU6は、異なる変速段となるように、変速機本体19の変速制御を実行する。
【0053】
続いて、図3を参照して、複数の変速線のうち、低速ギヤ側の変速段と高速ギヤ側の変速段との間にある所定の変速線に着目して説明を行う。変速マップMは、第1変速線L1と第2変速線L2とを有している。第1変速線L1は、P−EV走行時に用いられ、第2変速線L2は、P−HV走行時、E−EV走行時及びE−HV走行時に用いられる(図2参照)。つまり、P−EV走行時に用いられる変速線と、E−EV走行時に用いられる変速線とは異なっている。また、P−HV走行時に用いられる変速線と、E−HV走行時に用いられる変速線とは同じとなっている。さらに、E−EV走行時に用いられる変速線と、E−HV走行時に用いられる変速線とは同じとなっている。このため、ECU6は、第1走行モードにおいて、第1変速線L1と第2変速線L2とを用いた第1変速パターンに基づく変速制御を実行し、第2走行モードにおいて、第2変速線L2を用いた第2変速パターンに基づく変速制御を実行する。
【0054】
ここで、第1変速線L1は、効率良くモータジェネレータ10を動作可能な変速線であり、第2変速線L2は、効率良くエンジン7を動作可能な変速線となっている。また、第1変速線L1を挟んで高車速側が変速比の小さい高速ギヤ側であり、第1変速線L1を挟んで低車速側が変速比の大きい低速ギヤ側である。同様に、第2変速線L2を挟んで高車速側が変速比の小さい高速ギヤ側であり、第2変速線L2を挟んで低車速側が変速比の大きい低速ギヤ側である。このとき、第1変速線L1は、第2変速線L2に比して、高車速側でアクセル開度の小さい側となっている。つまり、所定の車速である場合、第1変速線L1は、第2変速線L2に比してアクセル開度が小さい側に設けられている。また、所定のアクセル開度である場合、第1変速線L1は、第2変速線L2に比して高車速側に設けられている。このため、所定の車速及び所定のアクセル開度である場合、ECU6は、第1変速線L1に基づく変速制御を実行すると、第2変速線L2に基づく変速制御を実行した場合に比して、変速機本体19の入力軸27の回転数が高くなる側へ変速制御を実行する場合がある。
【0055】
具体的に、ECU6は、車両2の車速及びアクセル開度が動作点P1にある場合、第2変速線L2に基づく変速制御を行うと、動作点P1は第2変速線L2を挟んで高速ギヤ側にあるため、変速比の小さい側で変速機本体19を変速制御する。一方、ECU6は、車両2の車速及びアクセル開度が動作点P1にある場合、第1変速線L1に基づく変速制御を行うと、動作点P1は第1変速線L1を挟んで低速ギヤ側にあるため、変速比の大きい側で変速機本体19を変速制御する。
【0056】
このため、ECU6は、動作点P1が第1変速線L1と第2変速線L2との間にある場合、例えば、E−EV走行からP−EV走行に切り替えられると、第2変速線L2から第1変速線L1に切り替えるため、高速ギヤ側から低速ギヤ側へ変速制御を行う。これにより、ECU6は、第2変速線L2から第1変速線L1に切り替えることで、変速機本体19の入力軸27の回転数を高くすることができる。よって、ECU6は、P−EV走行時に変速機本体19の入力軸27の回転数を高くすることで、モータジェネレータ10の回転数を高くする側へ変速制御する。これにより、ECU6は、変速機本体19の変速比をモータジェネレータ10に適した変速比にすることができる。
【0057】
ECU6は、動作点P1が第1変速線L1と第2変速線L2との間にある場合、例えば、P−HV走行とE−HV走行との間で切り替えられると、第2変速線L2のままであるため、変速制御を行わず、高速ギヤ側の状態を維持する。このため、ECU6は、P−HV走行とE−HV走行との間で切り替えられても、変速機本体19の入力軸27の回転数を維持することから、第1変速線L1の場合よりも回転数を低くすることができ、変速機本体19の変速比をエンジン7に適した変速比にすることができる。
【0058】
ECU6は、動作点P1が第1変速線L1と第2変速線L2との間にある場合、例えば、E−EV走行とE−HV走行との間で切り替えられると、第2変速線L2のままであるため、変速制御を行わず、高速ギヤ側の状態を維持する。このため、ECU6は、エンジン7の始動頻度の多い第2走行モードにおいて、E−EV走行とE−HV走行との間で切り替えられても、同じ変速線を用いることができるため、エンジン7の始動と変速制御とが同時に発生することを抑制することができ、ドライバビリティの低下を抑制することができる。
【0059】
以上から、ECU6は、P−EV走行時において、第1変速線L1に基づいて変速機本体19の変速比を制御することから、低速ギヤ側を多用することになるため、モータジェネレータ10の回転数を高くし易いものとすることができる。一方、ECU6は、P−HV走行時、E−EV走行時およびE−HV走行時において、第2変速線L2に基づいて変速機本体19の変速比を制御することから、高速ギヤ側を多用することになるため、モータジェネレータ10の回転数を高くし難いものとすることができる。
【0060】
続いて、図4を参照して、ECU6により変速マップMにおける変速線を選択する制御動作について説明する。なお、変速線を選択する制御動作は、変速制御の実行中において繰り返し実行される。先ず、ECU6は、変速機本体19の変速制御を開始すると、第1走行モードであるか否かを判定する(ステップS1)。ECU6は、車両2の走行時においてモード切替制御を実行していることから、バッテリ24の蓄電量に基づいて、第1走行モードであるか否かを判定可能となっている。つまり、ECU6は、バッテリ24の蓄電量が予め設定された所定の蓄電量よりも大きい場合、第1走行モードと判定する(ステップS1:Yes)。一方、ECU6は、バッテリ24の蓄電量が予め設定された所定の蓄電量以下である場合、第2走行モードと判定する(ステップS1:No)。
【0061】
ECU6は、ステップS1において、第1走行モードと判定する(ステップS1:Yes)と、車両2がEV走行しているか否かを判定する(ステップS2)。ECU6は、第1走行モードにおいて、EV走行とHV走行との切り替えをアクセル開度に基づいて実行していることから、アクセル開度に基づいてEV走行であるか否かを判定可能となっている。つまり、ECU6は、第1走行モードにおいて、アクセル開度が所定のアクセル開度以下である場合、EV走行と判定する(ステップS2:Yes)。これにより、ECU6は、第1走行モードにおけるEV走行であるP−EV走行と判定する。一方、ECU6は、アクセル開度が所定のアクセル開度よりも大きい場合、HV走行と判定する(ステップS2:No)。これにより、ECU6は、第1走行モードにおけるHV走行であるP−HV走行と判定する。
【0062】
ECU6は、ステップS2において、EV走行と判定する(ステップS2:Yes)と、変速マップMの変速線として第1変速線L1を選択し(ステップS3)、この後、変速線を選択する制御動作を終了する。そして、ECU6は、第1変速線L1に基づいて変速機本体19の変速制御を実行する。一方、ECU6は、ステップS1において第2走行モードと判定する(ステップS1:No)、又はステップS2においてHV走行であると判定する(ステップS2:No)と、変速マップMの変速線として第2変速線L2を選択し(ステップS4)、変速線を選択する制御動作を終了する。そして、ECU6は、第2変速線L2に基づいて変速機本体19の変速制御を実行する。
【0063】
以上のように、本実施形態の構成によれば、第1走行モードのP−EV走行時における変速線と、第2走行モードのE−EV走行時における変速線とを異なるものとすることができる。つまり、第1走行モードのP−EV走行時における変速線を第1変速線L1とし、第2走行モードのE−EV走行時における変速線を第2変速線L2とすることができる。このため、第1走行モードは、第2走行モードに比してP−EV走行とP−HV走行との切り替えが少ない、つまり、エンジン7の始動頻度が少ないことから、P−EV走行時の変速線をモータジェネレータ10に適した第1変速線L1にすることで、効率良くモータジェネレータ10を作動させることができる。また、第2走行モードは、第1走行モードに比してE−EV走行とE−HV走行との切り替えが多い、つまり、エンジン7の始動頻度が多いことから、E−EV走行時の変速線をエンジン7に適した第2変速線L2にすることで、ドライバビリティの低下を抑制することができる。
【0064】
また、本実施形態の構成によれば、第1走行モードのP−HV走行時における変速線と、第2走行モードのE−HV走行時における変速線とを同じものとすることができる。つまり、第1走行モードのP−HV走行時における変速線を第2変速線L2とし、第2走行モードのE−HV走行時における変速線を第2変速線L2とすることができる。このため、P−HV走行時の変速線及びE−HV走行時の変速線をエンジン7に適した第2変速線L2にすることで、効率良くエンジン7を作動させることができ、燃費の向上を図ることができる。
【0065】
また、本実施形態の構成によれば、第2走行モードのE−EV走行時における変速線と、第2走行モードのE−HV走行時における変速線とを同じものとすることができる。つまり、第2走行モードのE−EV走行時における変速線を第2変速線L2とし、第2走行モードのE−HV走行時における変速線を第2変速線L2とすることができる。このため、第2走行モードは、第1走行モードに比してE−EV走行とE−HV走行との切り替えが多いことから、同じ第2変速線L2にすることで、エンジン始動と変速段の変更とが同時に発生する頻度を少なくでき、これにより、ドライバビリティの低下を抑制することができる。
【0066】
また、本実施形態の構成によれば、第1変速線L1を、第2変速線L2に比して高車速側で低開度側にすることができる。このため、第1変速線L1と第2変速線L2との間に動作点P1がある場合、第2変速線L2に基づく変速制御であれば、有段変速機は、変速比が小さい側のギヤ段(高速ギヤ)にすることができる。一方で、第1変速線L1に基づく変速制御であれば、有段変速機は、変速比が大きい側のギヤ段(低速ギヤ)にすることができる。これにより、第1変速線L1に基づく変速制御は、第2変速線L2に基づく変速制御に比して、変速機本体19の入力軸27の回転数が高くなる変速制御であることから、モータジェネレータ10の回転数を高くでき、効率良くモータジェネレータ10を作動させることが可能となる。また、第2変速線L2に基づく変速制御は、第1変速線L1に基づく変速制御に比して、変速機本体19の入力軸27の回転数が低くなる変速制御であることから、効率良くエンジン7を作動させることが可能となる。
【0067】
なお、本実施形態では、有段変速機に適用して説明したが、無段変速機に適用してもよい。この場合、第1走行モードにおいて、P−EV走行時に変速機本体19の入力軸27の回転数が高くなり、P−HV走行時に変速機本体19の入力軸27の回転数が低くなる第1変速パターンであることが好ましい。また、第2走行モードにおいて、E−EV走行時およびE−HV走行時に変速機本体19の入力軸27の回転数が低くなる第2変速パターンであることが好ましい。具体的には、変速マップとして、P−EV走行時に用いられる第1変速マップと、P−HV走行時、E−EV走行時およびE−HV走行時に用いられる第2変速マップとを用意する。このとき、第1変速マップは、第2変速マップに比して、変速機本体19の入力軸27の回転数が高くなるような変速マップである。そして、ECU6は、走行状態に応じて変速マップを適宜切り替え、切り替えた変速マップに基づいて無段変速機を変速制御することが好ましい。つまり、第1走行モードのP−EV走行時の第1変速パターンは、第2走行モードのE−EV走行時の第2変速パターンを選択した場合に比して、変速比が大きくなる変速パターンである。言い換えれば、第1走行モードと第2走行モードとで車両2の走行状態が同等であれば、第1走行モードのP−EV走行時における変速比が、第2走行モードの変速比と比較して大きい側となる。これにより、ECU6は、P−EV走行時において、モータジェネレータ10の回転数が高くなるように変速機本体19を変速制御でき、効率良くモータジェネレータ10を作動させることが可能となる。
【符号の説明】
【0068】
1 車両制御システム
2 車両
3 駆動輪
4 駆動装置
5 状態検出装置
6 ECU(制御装置)
7 エンジン(内燃機関)
9 K0クラッチ
10 モータジェネレータ(電動機)
11 トルクコンバータ
12 変速機
18 C1クラッチ
24 バッテリ
25 ロックアップクラッチ
【技術分野】
【0001】
本発明は、車両制御システム及び制御装置に関する。
【背景技術】
【0002】
従来、エンジンと、エンジンに接続された動力分配統合機構と、動力分配統合機構に接続されたモータと、変速機を介して動力分配統合機構に接続されたモータと、車両を制御する電子制御ユニットとを備えたハイブリッド自動車が知られている(例えば、特許文献1参照)。このハイブリッド自動車は、エンジンを運転しているときに、エンジンを運転している状態で車両全体の効率が良好となるようにモータの回転数を変速して駆動軸に伝達する変速機の変速状態を設定したエンジン運転時変速マップを用いて、変速機のギヤの状態を切り替えている。一方、ハイブリッド自動車は、エンジンを運転していないときに、エンジンの運転を停止した状態で走行する際に車両全体の効率が良好となるよう変速機の変速状態を設定したモータ走行時変速マップを用いて、変速機のギヤの状態を切り替えている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−170317号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、ハイブリッド自動車等の車両は、エンジンの始動頻度を少なくしモータでの走行を優先する第1走行モードと、電気モータでの走行を優先せずにエンジン及びモータで走行する第2走行モードとを切り替えて走行する場合がある。車両は、第2走行モードである場合、モータの動力のみで走行するEV走行と、エンジン及びモータの動力で走行するHV走行とを適宜切り替える。一方、車両は、第1走行モードである場合、モータでの走行を優先していることから、第2走行モードに比してEV走行とHV走行との切り替え頻度は少ない。
【0005】
ここで、EV走行とHV走行との切り替え頻度が多い第2走行モードにおいて、従来のように、EV走行とHV走行との切り替えに応じて変速マップを切り替えると、車両は、変速機の変速比を変更する頻度が多くなる。このとき、エンジンの始動と変速比の変更とが同時に発生すると、車両の変動が大きくなり、ドライバビリティが悪化する虞がある。このため、第1走行モード及び第2走行モードにおいて、EV走行とHV走行とで同一の変速マップを用いることが考えられるが、この場合、EV走行とHV走行とで同一の変速マップを用いると、EV走行時におけるモータの作動効率、又はHV走行時におけるエンジンの作動効率が低下する虞があり、燃費の向上を図ることが困難となる。
【0006】
本発明は、上記の事情に鑑みてなされたものであって、ドライバビリティの低下を抑制しつつ、燃費の向上を図ることができる車両制御システム及び制御装置を提供することを課題とする。
【課題を解決するための手段】
【0007】
本発明の車両制御システムは、車両の動力源となる内燃機関及び電動機と、内燃機関又は電動機からの動力を変速して出力する自動変速機と、内燃機関、電動機及び自動変速機を制御する制御装置と、を備えた車両制御システムであって、制御装置は、内燃機関の始動頻度が少ない車両の走行モードである第1走行モードと、第1走行モードに比して内燃機関の始動頻度が多い車両の走行モードである第2走行モードとを切り替えるモード切替制御と、第1走行モードにおいて、第1変速パターンに基づく自動変速機の変速制御と、第2走行モードにおいて、第2変速パターンに基づく自動変速機の変速制御と、を実行し、第1走行モードにおいて電動機の動力で走行する第1EV走行時の第1変速パターンと、第2走行モードにおいて電動機の動力で走行する第2EV走行時の第2変速パターンとは、異なっていることを特徴とする。
【0008】
また、第1走行モードにおいて内燃機関の動力及び電動機の動力で走行する第1HV走行時の第1変速パターンと、第2走行モードにおいて内燃機関の動力及び電動機の動力で走行する第2HV走行時の第2変速パターンとは、同じであることが好ましい。
【0009】
また、第2EV走行時の第2変速パターンと、第2走行モードにおいて内燃機関の動力及び電動機の動力で走行する第2HV走行時の第2変速パターンとは、同じであることが好ましい。
【0010】
また、第1EV走行時の第1変速パターンは、第2EV走行時の第2変速パターンを選択した場合に比して、電動機の回転数が高くなる変速パターンであることが好ましい。
【0011】
また、自動変速機は、有段変速機であり、制御装置は、変速線に基づいて変速制御を実行し、第1変速パターンは、第1EV走行時の第1変速線を有し、第2変速パターンは、第2EV走行時の第2変速線を有し、第1変速線は、第2変速線に比して、高車速側でアクセル開度の小さい側となっていることが好ましい。
【0012】
また、自動変速機は、無段変速機であり、第1EV走行時の第1変速パターンは、第2EV走行時の第2変速パターンを選択した場合に比して、変速比が大きくなる変速パターンであることが好ましい。
【0013】
本発明の制御装置は、車両の動力源となる内燃機関及び電動機と、内燃機関又は電動機からの動力を変速して出力する自動変速機と、を制御する制御装置であって、内燃機関の始動頻度が少ない車両の走行モードである第1走行モードと、第1走行モードに比して内燃機関の始動頻度が多い車両の走行モードである第2走行モードとを切り替えるモード切替制御と、第1走行モードにおいて、第1変速パターンに基づく自動変速機の変速制御と、第2走行モードにおいて、第2変速パターンに基づく自動変速機の変速制御と、を実行し、第1走行モードにおいて電動機の動力で走行する第1EV走行時の第1変速パターンと、第2走行モードにおいて電動機の動力で走行する第2EV走行時の第2変速パターンとは、異なっていることを特徴とする。
【発明の効果】
【0014】
本発明に係る車両制御システム及び制御装置は、ドライバビリティの低下を抑制しつつ、燃費の向上を図ることができるという効果を奏する。
【図面の簡単な説明】
【0015】
【図1】図1は、実施形態に係る車両制御システムの概略構成図である。
【図2】図2は、実施形態に係る車両制御システムを搭載した車両の走行モード及び走行状態を表す説明図である。
【図3】図3は、実施形態に係る車両制御システムのECUに記憶された変速マップの説明図である。
【図4】図4は、実施形態に係る車両制御システムのECUにより変速線を選択する制御動作のフローチャートである。
【発明を実施するための形態】
【0016】
以下に、本発明に係る実施形態を図面に基づいて詳細に説明する。なお、この実施形態によりこの発明が限定されるものではない。また、下記実施形態における構成要素には、当業者が置換可能かつ容易なもの、或いは実質的に同一のものが含まれる。
【0017】
[実施形態]
図1は、実施形態に係る車両制御システムの概略構成図である。図2は、実施形態に係る車両制御システムを搭載した車両の走行モード及び走行状態を表す説明図である。図3は、実施形態に係る車両制御システムのECUに記憶された変速マップの説明図である。図4は、実施形態に係る車両制御システムのECUにより変速線を選択する制御動作のフローチャートである。
【0018】
本実施形態は、1つのモータジェネレータと自動変速機、典型的には、有段自動変速機を備えたいわゆる1MG+AT型のパラレルハイブリッド形式の車両制御システムである。本実施形態の車両制御システム1は、図1に示すように、車両2に搭載され、この車両2を制御するためのシステムである。車両2は、車両2を走行させる動力源(走行用駆動源)として、内燃機関としてのエンジン7と、電動機としてのモータジェネレータ10とを搭載した、いわゆる「ハイブリッド車両」である。より詳細には、車両2は、差込プラグを介して供給される電力を蓄電可能なバッテリ24を備えた「プラグインハイブリッド車両」である。
【0019】
車両制御システム1は、車両2の駆動輪3を駆動する駆動装置4と、車両2の状態を検出する状態検出装置5と、駆動装置4を含む車両2の各部を制御する制御装置としてのECU6とを備える。
【0020】
駆動装置4は、車両2においてパラレルハイブリッド形式のパワートレーンを構成し、1つのエンジン7と、1つのモータジェネレータ10とを有し、これらにより駆動輪3を回転駆動するものである。
【0021】
駆動装置4は、エンジン7と、ダンパ機構8と、K0クラッチ9と、モータジェネレータ10とを備える。さらに、駆動装置4は、トルクコンバータ11と、変速機12と、プロペラ軸13と、デファレンシャルギヤ14と、ドライブ軸15とを備える。また、トルクコンバータ11は、ロックアップ機構16と、流体伝達機構17とを含んで構成されたロックアップ機構付トルクコンバータである。変速機12は、C1クラッチ18と、変速機本体19とを含んで構成される。
【0022】
この駆動装置4は、各構成要素が駆動輪3への動力の伝達経路に対して、エンジン7、ダンパ機構8、K0クラッチ9、モータジェネレータ10、トルクコンバータ11のロックアップ機構16、流体伝達機構17、変速機12のC1クラッチ18、変速機本体19、プロペラ軸13、デファレンシャルギヤ14、ドライブ軸15の順で相互に動力伝達可能に配置される。この場合、駆動装置4は、エンジン7の出力軸であるクランク軸20とモータジェネレータ10の出力軸であるロータ軸21とがダンパ機構8、K0クラッチ9を介して連結される。さらに、駆動装置4は、ロータ軸21と駆動輪3とがトルクコンバータ11、変速機12、プロペラ軸13、デファレンシャルギヤ14、ドライブ軸15等を介して連結される。
【0023】
より詳細には、エンジン7は、燃焼室で燃料を燃焼させることにより燃料のエネルギを機械的仕事に変換して動力として出力する熱機関である。エンジン7は、燃料の燃焼に伴ってクランク軸20に機械的な動力(エンジントルク)を発生させ、この機械的動力をクランク軸20から出力可能である。また、このエンジン7は、車両2の停車中、走行中にかかわらず、作動状態と非作動状態とを切り替え可能である。
【0024】
ここで、エンジン7の作動状態(エンジン7を作動させた状態)とは、駆動輪3に作用させる動力を発生する状態であり、燃焼室で燃料を燃焼して生じる熱エネルギをトルクなどの機械的エネルギの形で出力する状態である。つまり、エンジン7は、作動状態では燃焼室で燃料を燃焼させて車両2の駆動輪3に作用させる動力を発生する。一方、エンジン7の非作動状態、すなわち、エンジン7の作動を停止させた状態とは、動力の発生を停止した状態であり、燃焼室への燃料の供給をカットし(フューエルカット)、燃焼室で燃料を燃焼させずトルクなどの機械的エネルギを出力しない状態である。
【0025】
K0クラッチ9は、エンジン7のクランク軸20とモータジェネレータ10のロータ軸21とをダンパ機構8を介して連結可能である。K0クラッチ9は、クランク軸20とロータ軸21とを動力伝達可能に係合した係合状態と、この係合を解除した解放状態と、係合状態と解放状態との間のスリップ状態とに切り替え可能である。K0クラッチ9は、係合状態となることで、クランク軸20とロータ軸21とをダンパ機構8を介して一体回転可能に連結し、エンジン7とモータジェネレータ10との間での動力伝達が可能な状態となる。一方、K0クラッチ9は、解放状態となることでクランク軸20とロータ軸21とを切り離しエンジン7とモータジェネレータ10との間での動力伝達が遮断された状態となる。
【0026】
K0クラッチ9は、種々のクラッチを用いることができ、例えば、湿式多板クラッチや乾式単板クラッチ等の摩擦式ディスククラッチ装置を用いることができる。ここでは、K0クラッチ9は、例えば、K0クラッチ9に供給される作動油の油圧であるクラッチ油圧に応じて作動する油圧式の装置である。K0クラッチ9は、クラッチ油圧に応じた係合力(クラッチ板を係合する押圧力)が0である場合に係合が完全に解除された解放状態となり、係合力が大きくなるにしたがってスリップ状態(半係合状態)を経て完全に係合した係合状態となる。K0クラッチ9における伝達トルクは、解放状態では0であり、スリップ状態では係合力に応じた大きさとなり、係合状態では最大となる。なお、以下で説明するC1クラッチ18、ロックアップクラッチ25についてもこのK0クラッチ9とほぼ同様である。
【0027】
モータジェネレータ10は、例えば、交流同期電動機等である。モータジェネレータ10は、固定子としてのステータ22がケース等に固定され、回転子としてのロータ23がステータ22の径方向内側に配置されてロータ軸21に一体回転可能に結合される。モータジェネレータ10は、インバータなどを介してバッテリ24から供給された電力を機械的動力に変換する電動機としての機能(力行機能)と、入力された機械的動力を電力に変換しインバータなどを介してバッテリ24に充電する発電機としての機能(回生機能)とを兼ね備えた回転電機である。モータジェネレータ10は、例えば、バッテリ24からインバータを介して交流電力の供給を受けて駆動し、ロータ軸21に機械的な動力(モータトルク)を発生させ、この機械的動力をロータ軸21から出力可能である。
【0028】
トルクコンバータ11は、流体継手の一種であり、モータジェネレータ10のロータ軸21に連結される。トルクコンバータ11は、エンジン7又はモータジェネレータ10からの動力を、ロックアップクラッチ25を介して伝達するロックアップ機構16と、作動油を介して伝達する流体伝達機構17とを有する。ロックアップ機構16は、ロックアップクラッチ25を介してロータ軸21とトルクコンバータ11の出力軸26とを連結可能である。流体伝達機構17は、ポンプ(ポンプインペラ)17p、タービン(タービンランナ)17t、ステータ17s、ワンウェイクラッチ17c等を含んで構成され、内部に作動流体としての作動油が充填される。ポンプ17pは、ロータ軸21と一体回転可能に連結され、タービン17tは、出力軸26と一体回転可能に連結される。ロックアップクラッチ25は、ロータ軸21とタービン17tとを動力伝達可能に係合した係合状態と、この係合を解除した解放状態と、係合状態と解放状態との間のスリップ状態とに切り替え可能である。トルクコンバータ11は、エンジン7又はモータジェネレータ10からの動力を、ロックアップクラッチ25の状態に応じて、ロックアップ機構16、又は、流体伝達機構17を介して出力軸26に伝達し、この出力軸26から出力することができる。
【0029】
変速機12は、上述したように、C1クラッチ18と変速機本体19とを含んで構成され、トルクコンバータ11からの動力を変速して駆動輪3側に出力するものである。C1クラッチ18は、トルクコンバータ11の出力軸26と駆動輪3とを変速機本体19、プロペラ軸13、デファレンシャルギヤ14、ドライブ軸15等を介して連結可能である。ここでは、C1クラッチ18は、トルクコンバータ11の出力軸26と変速機本体19の入力軸27とを動力伝達可能に係合した係合状態と、この係合を解除した解放状態と、係合状態と解放状態との間のスリップ状態とに切り替え可能である。
【0030】
変速機本体19は、例えば、有段自動変速機(AT)、無段自動変速機(CVT)、マルチモードマニュアルトランスミッション(MMT)、シーケンシャルマニュアルトランスミッション(SMT)、デュアルクラッチトランスミッション(DCT)などのいわゆる自動変速機である。ここでは、変速機本体19は、例えば、それぞれに所定の変速比が割り当てられた複数の変速段(ギヤ段)を含んで構成される有段自動変速機が適用される。変速機本体19は、トルクコンバータ11の出力軸26からC1クラッチ18を介して入力軸27に入力された動力を所定の変速段(変速比)で変速して出力軸に伝達し、この出力軸に一体回転可能に結合されるプロペラ軸13に出力する。
【0031】
デファレンシャルギヤ14は、プロペラ軸13からの動力を、各ドライブ軸15を介して各駆動輪3に伝達する。デファレンシャルギヤ14は、車両2が旋回する際に生じる旋回の中心側、つまり内側の駆動輪3と、外側の駆動輪3との回転速度の差を吸収する。
【0032】
上記のように構成される駆動装置4は、エンジン7が発生させた動力をクランク軸20からダンパ機構8、K0クラッチ9、ロータ軸21、トルクコンバータ11、変速機12、プロペラ軸13、デファレンシャルギヤ14、ドライブ軸15を介して駆動輪3に伝達することができる。また、駆動装置4は、モータジェネレータ10が発生させた動力をロータ軸21から、K0クラッチ9を介さずに、トルクコンバータ11、変速機12、プロペラ軸13、デファレンシャルギヤ14、ドライブ軸15を介して駆動輪3に伝達することができる。この結果、車両2は、駆動輪3と路面との接地面に駆動力を生じさせ、これにより走行することができる。
【0033】
状態検出装置5は、車両2の状態を検出するものであり、車両2の状態を表す種々の状態量や物理量、スイッチ類の作動状態等を検出するものである。状態検出装置5は、ECU6と電気的に接続されており、相互に検出信号や駆動信号、制御指令等の情報の授受を行うことができる。状態検出装置5は、例えば、アクセル開度センサ50、ブレーキセンサ51、車速センサ52、クランク角センサ53、モータ回転数センサ54、タービン回転数センサ55、プロペラ回転数センサ56、充電状態検出器57等を含む。アクセル開度センサ50は、運転者による車両2のアクセルペダルの操作量(アクセル操作量、加速要求操作量)に相当するアクセル開度を検出する。ブレーキセンサ51は、運転者による車両2のブレーキペダルの操作量(ブレーキ操作量、制動要求操作量)に相当するマスタシリンダ圧、あるいは、ブレーキ踏力等を検出する。車速センサ52は、車両2の走行速度である車速を検出する。クランク角センサ53は、クランク軸20の回転角度であるクランク角度を検出する。ECU6は、このクランク角度に基づいて、エンジン7の各気筒における吸気行程、圧縮行程、膨張行程、排気行程を判別すると共に、クランク軸20の回転数(回転速度)であるエンジン回転数を算出することができる。モータ回転数センサ54は、モータジェネレータ10のロータ軸21の回転数であるモータ回転数を検出する。タービン回転数センサ55は、トルクコンバータ11のタービン17tの回転数であり、トルクコンバータ11の出力軸26の回転数であるタービン回転数、およびC1クラッチ18の係合時における変速機本体19の入力軸27の回転数である入力回転数を検出する。プロペラ回転数センサ56は、変速機本体19の出力軸となるプロペラ軸13の回転数であるプロペラ回転数を検出する。充電状態検出器57は、バッテリ24の蓄電量(充電量)やバッテリ電圧等に応じた蓄電状態SOCを検出する。
【0034】
ECU6は、車両制御システム1の全体の制御を統括的に行い、エンジン7やモータジェネレータ10等を協調して制御するための制御ユニットである。ECU6は、CPU、ROM、RAM及びインターフェースを含む周知のマイクロコンピュータを主体とする電子回路である。ECU6は、状態検出装置5が電気的に接続され、また、エンジン7の燃料噴射装置、点火装置、スロットル装置、モータジェネレータ10のインバータ、バッテリ24等が電気的に接続される。さらに、ECU6は、K0クラッチ9、ロックアップクラッチ25、C1クラッチ18及び変速機本体19等に油圧制御装置28を介して接続され、油圧制御装置28を介してこれらの動作を制御する。ECU6は、状態検出装置5が検出した検出結果に対応した電気信号が入力され、入力された検出結果に応じてエンジン7、モータジェネレータ10のインバータ、油圧制御装置28等の駆動装置4の各部に駆動信号を出力しこれらの駆動を制御する。
【0035】
ここで、油圧制御装置28は、作動流体としての作動油(オイル)の油圧によって、変速機本体19の変速動作やK0クラッチ9、ロックアップクラッチ25、C1クラッチ18等の係合要素の係合・解放・スリップ動作を制御するものである。油圧制御装置28は、ECU6により制御される種々の公知の油圧制御回路を含んで構成され、例えば、複数の油路、オイルリザーバ、オイルポンプ、複数の電磁弁などを含んで構成される。油圧制御装置28は、ECU6からの信号に応じて、駆動装置4の各部に供給される作動油の流量あるいは油圧を制御する。
【0036】
ECU6は、例えば、アクセル開度、車速等に基づいてエンジン7のスロットル装置を制御し、吸気通路のスロットル開度を調節し、吸入空気量を調節して、その変化に対応して燃料噴射量を制御し、燃焼室に充填される混合気の量を調節してエンジン7の出力を制御する。また、ECU6は、例えば、アクセル開度、車速等に基づいて油圧制御装置28を制御し、変速機本体19の変速動作やK0クラッチ9、ロックアップクラッチ25、C1クラッチ18等の係合・解放・スリップ動作等を制御する。
【0037】
また、ECU6には、変速機本体19の変速制御を実行するために用いられる変速マップMが記憶されている。ECU6は、タービン回転数センサ55により検出される変速機本体19の入力軸27の回転数、およびプロペラ回転数センサ56により検出されるプロペラ軸13(変速機本体19の出力軸)の回転数を取得し、変速マップMに基づいて、変速機本体19の変速比を変更することで、変速機本体19の入力軸27の回転数および出力軸の回転数を所定の回転数にそれぞれ制御する。
【0038】
上記のように構成される車両制御システム1は、ECU6が駆動装置4を制御し、エンジン7とモータジェネレータ10とを併用又は選択使用することで、車両2を様々な走行モードおよび走行状態で走行させることができる。
【0039】
先ずは、車両2の走行状態について説明する。ECU6は、例えば、K0クラッチ9を係合状態(K0クラッチON)としかつエンジン7を作動させ、走行用駆動源であるエンジン7とモータジェネレータ10とのうちエンジン7から出力する動力(エンジントルク)のみを駆動輪3に伝達させる。このとき、C1クラッチ18は、係合状態(C1クラッチON)となっている。これにより、車両制御システム1は、「エンジン走行」を実現することができる(図示省略)。したがって、車両2は、走行用駆動源のうちエンジン7のみを用いて走行することができる。
【0040】
また、ECU6は、例えば、上記のようにK0クラッチ9を係合状態(K0クラッチON)としかつエンジン7を作動させた状態で、要求駆動力やバッテリ24の蓄電状態SOCに応じてモータジェネレータ10を力行させ、エンジン7から出力する動力と、モータジェネレータ10から出力する動力(モータトルク)とを統合して駆動輪3に伝達させる。このとき、C1クラッチ18は、係合状態(C1クラッチON)となっている。これにより、車両制御システム1は、「HV走行」を実現することができる。したがって、車両2は、エンジン7とモータジェネレータ10とを併用して走行することができる。
【0041】
さらに、ECU6は、例えば、K0クラッチ9を解放状態(K0クラッチOFF)としかつエンジン7を停止し非作動状態とした上で、モータジェネレータ10を力行させ、走行用駆動源であるエンジン7とモータジェネレータ10とのうちモータジェネレータ10から出力する動力のみを駆動輪3に伝達させる。このとき、C1クラッチ18は、係合状態(C1クラッチON)となっている。また、エンジン7は、非作動状態でありかつK0クラッチ9が解放状態であるから、クランク軸20の回転も停止している。これにより、車両制御システム1は、「EV走行」を実現することができる。したがって、車両2は、走行用駆動源のうちモータジェネレータ10のみを用いて走行することができる。このとき、車両2は、基本的にはクランク軸20とロータ軸21とがK0クラッチ9にて機械的に切り離された状態となり、エンジン7の回転抵抗が作用しない状態となる。
【0042】
また、ECU6は、例えば、車両2の減速走行時に、モータジェネレータ10を制御し、駆動輪3からロータ軸21に伝達される動力によってモータジェネレータ10にて回生により発電し、これに伴ってロータ軸21に生じる機械的動力(負のモータトルク)を駆動輪3に伝達する。このとき、C1クラッチ18は、係合状態(C1クラッチON)となっている。これにより、車両制御システム1は、「回生走行」を実現することができる(図示省略)。したがって、車両2は、モータジェネレータ10により回生制動されて減速走行することができる。
【0043】
続いて、車両2の走行モードについて説明する。ECU6は、エンジン7の始動頻度が少なくモータジェネレータ10を優先して作動させる第1走行モードを実行可能となっている。第1走行モードは、プラグインハイブリッド車両2において、主にバッテリ24に充電された電力を用いて走行するモードである。
【0044】
また、ECU6は、第1走行モードに比してエンジン7の始動頻度が多くモータジェネレータ10での走行を優先しない第2走行モードを実行可能となっている。第2走行モードは、プラグインハイブリッド車両2において、例えば、バッテリ24の蓄電量が少ない場合に、エンジン7の動力を用いて走行するモードである。
【0045】
そして、ECU6は、第1走行モードと第2走行モードとを切り替えるモード切替制御を実行する。ECU6は、モード切替制御を実行すると、充電状態検出器57の検出結果に基づいて、第1走行モードと第2走行モードとを切り替える。具体的に、ECU6は、充電状態検出器57によるバッテリ24の蓄電量が、予め設定された所定の蓄電量よりも大きい場合、第1走行モードを実行する。一方、ECU6は、充電状態検出器57によるバッテリ24の蓄電量が、予め設定された所定の蓄電量以下である場合、第2走行モードを実行する。
【0046】
なお、本実施形態において、ECU6は、バッテリ24の蓄電量に基づいて、第1走行モードと第2走行モードとの切り替えを実行したが、この構成に限定されない。例えば、走行モードを切り替える切替スイッチを別途設け、ECU6が、切替スイッチの操作を検出することで、第1走行モードと第2走行モードとを切り替えてもよい。
【0047】
次に、図2を参照し、車両2の走行モードと走行状態とについて説明する。ここで、第1走行モードにおけるEV走行を、P−EV走行(第1EV走行)とし、第1走行モードにおけるHV走行を、P−HV走行(第1HV走行)としている。また、第2走行モードにおけるEV走行を、E−EV走行(第2EV走行)とし、第2走行モードにおけるHV走行を、E−HV走行(第2HV走行)としている。
【0048】
ECU6は、第1走行モードにおけるP−EV走行とP−HV走行との走行状態の切替を、例えば、アクセル開度及び車速に基づいて実行している。つまり、ECU6は、第1走行モードにおいて、車速センサ52によって検出された車速が所定の車速である場合、アクセル開度センサ50によって検出されたアクセル開度が、所定のアクセル開度以下であると、車両2の走行状態がP−EV走行となるように制御する。一方、ECU6は、第1走行モードにおいて、車速センサ52によって検出された車速が所定の車速である場合、アクセル開度センサ50によって検出されたアクセル開度が、所定のアクセル開度よりも大きいと、車両2の走行状態がP−HV走行となるように制御する。具体的に、低車速時の場合における所定のアクセル開度としては60%であり、高車速時の場合における所定のアクセル開度としては40%である。
【0049】
なお、本実施形態において、ECU6は、第1走行モードにおけるP−EV走行とP−HV走行との走行状態の切替を、アクセル開度に基づいて行ったが、この構成に限定されない。例えば、ECU6は、車両2に対して要求された要求駆動力に基づいて、P−EV走行とP−HV走行との走行状態の切替を行ってもよい。
【0050】
また、ECU6は、第2走行モードにおけるE−EV走行とE−HV走行との走行状態の切替を、第1走行モードと同様に、アクセル開度及び車速に基づいて実行している。このとき、ECU6は、所定のアクセル開度が第1走行モードに比して小さい値となるように設定されている。また、ECU6は、第2走行モードにおけるE−EV走行とE−HV走行との走行状態の切替を、充電状態検出器57の検出結果に基づいて実行することもできる。つまり、ECU6は、充電状態検出器57で検出したバッテリ24の蓄電量が、予め設定された所定の蓄電量よりも大きい場合、E−EV走行を実行する。一方、ECU6は、充電状態検出器57で検出したバッテリ24の蓄電量が、予め設定された所定の蓄電量以下である場合、E−HV走行を実行する。このため、第2走行モードは、第1走行モードに比してEV走行とHV走行との切替が多くなり、第1走行モードに比してエンジン7の始動頻度が多くなる。
【0051】
また、ECU6は、第1走行モード及び第2走行モードにおいて、変速マップMに基づく変速制御を実行している。ここで、図3を参照し、変速マップMについて説明する。変速マップMは、その横軸が車速となっており、その縦軸がアクセル開度となっている。変速マップMには、P−EV走行領域E1とP−HV走行領域E2とが設定されている。P−EV走行領域E1は、所定のアクセル開度以下となる領域であり、P−HV走行領域E2は、所定のアクセル開度よりも大きくなる領域である。なお、この変速マップMは、低車速側における変速マップであり、所定のアクセル開度として、例えば60%が設定されている。このため、上記したように、高車速側の変速マップMでは、所定のアクセル開度として40%を設定してもよい。
【0052】
また、変速マップMは、変速機本体19の複数の変速段を切り替えるための複数の変速線を有している。ECU6は、変速マップMに基づく変速制御を実行すると、アクセル開度センサ50で検出されたアクセル開度と、車速センサ52で検出された車速とに基づいて、変速マップM上における車両2の動作点の位置から、所定の変速段を設定する。そして、ECU6は、設定された変速段となるように、変速機本体19の変速制御を実行する。また、車両2の走行状態に応じて車両2の動作点が変更される際、車両2の動作点が変速線を超えて(跨いで)変更されると異なる変速段となるため、ECU6は、異なる変速段となるように、変速機本体19の変速制御を実行する。
【0053】
続いて、図3を参照して、複数の変速線のうち、低速ギヤ側の変速段と高速ギヤ側の変速段との間にある所定の変速線に着目して説明を行う。変速マップMは、第1変速線L1と第2変速線L2とを有している。第1変速線L1は、P−EV走行時に用いられ、第2変速線L2は、P−HV走行時、E−EV走行時及びE−HV走行時に用いられる(図2参照)。つまり、P−EV走行時に用いられる変速線と、E−EV走行時に用いられる変速線とは異なっている。また、P−HV走行時に用いられる変速線と、E−HV走行時に用いられる変速線とは同じとなっている。さらに、E−EV走行時に用いられる変速線と、E−HV走行時に用いられる変速線とは同じとなっている。このため、ECU6は、第1走行モードにおいて、第1変速線L1と第2変速線L2とを用いた第1変速パターンに基づく変速制御を実行し、第2走行モードにおいて、第2変速線L2を用いた第2変速パターンに基づく変速制御を実行する。
【0054】
ここで、第1変速線L1は、効率良くモータジェネレータ10を動作可能な変速線であり、第2変速線L2は、効率良くエンジン7を動作可能な変速線となっている。また、第1変速線L1を挟んで高車速側が変速比の小さい高速ギヤ側であり、第1変速線L1を挟んで低車速側が変速比の大きい低速ギヤ側である。同様に、第2変速線L2を挟んで高車速側が変速比の小さい高速ギヤ側であり、第2変速線L2を挟んで低車速側が変速比の大きい低速ギヤ側である。このとき、第1変速線L1は、第2変速線L2に比して、高車速側でアクセル開度の小さい側となっている。つまり、所定の車速である場合、第1変速線L1は、第2変速線L2に比してアクセル開度が小さい側に設けられている。また、所定のアクセル開度である場合、第1変速線L1は、第2変速線L2に比して高車速側に設けられている。このため、所定の車速及び所定のアクセル開度である場合、ECU6は、第1変速線L1に基づく変速制御を実行すると、第2変速線L2に基づく変速制御を実行した場合に比して、変速機本体19の入力軸27の回転数が高くなる側へ変速制御を実行する場合がある。
【0055】
具体的に、ECU6は、車両2の車速及びアクセル開度が動作点P1にある場合、第2変速線L2に基づく変速制御を行うと、動作点P1は第2変速線L2を挟んで高速ギヤ側にあるため、変速比の小さい側で変速機本体19を変速制御する。一方、ECU6は、車両2の車速及びアクセル開度が動作点P1にある場合、第1変速線L1に基づく変速制御を行うと、動作点P1は第1変速線L1を挟んで低速ギヤ側にあるため、変速比の大きい側で変速機本体19を変速制御する。
【0056】
このため、ECU6は、動作点P1が第1変速線L1と第2変速線L2との間にある場合、例えば、E−EV走行からP−EV走行に切り替えられると、第2変速線L2から第1変速線L1に切り替えるため、高速ギヤ側から低速ギヤ側へ変速制御を行う。これにより、ECU6は、第2変速線L2から第1変速線L1に切り替えることで、変速機本体19の入力軸27の回転数を高くすることができる。よって、ECU6は、P−EV走行時に変速機本体19の入力軸27の回転数を高くすることで、モータジェネレータ10の回転数を高くする側へ変速制御する。これにより、ECU6は、変速機本体19の変速比をモータジェネレータ10に適した変速比にすることができる。
【0057】
ECU6は、動作点P1が第1変速線L1と第2変速線L2との間にある場合、例えば、P−HV走行とE−HV走行との間で切り替えられると、第2変速線L2のままであるため、変速制御を行わず、高速ギヤ側の状態を維持する。このため、ECU6は、P−HV走行とE−HV走行との間で切り替えられても、変速機本体19の入力軸27の回転数を維持することから、第1変速線L1の場合よりも回転数を低くすることができ、変速機本体19の変速比をエンジン7に適した変速比にすることができる。
【0058】
ECU6は、動作点P1が第1変速線L1と第2変速線L2との間にある場合、例えば、E−EV走行とE−HV走行との間で切り替えられると、第2変速線L2のままであるため、変速制御を行わず、高速ギヤ側の状態を維持する。このため、ECU6は、エンジン7の始動頻度の多い第2走行モードにおいて、E−EV走行とE−HV走行との間で切り替えられても、同じ変速線を用いることができるため、エンジン7の始動と変速制御とが同時に発生することを抑制することができ、ドライバビリティの低下を抑制することができる。
【0059】
以上から、ECU6は、P−EV走行時において、第1変速線L1に基づいて変速機本体19の変速比を制御することから、低速ギヤ側を多用することになるため、モータジェネレータ10の回転数を高くし易いものとすることができる。一方、ECU6は、P−HV走行時、E−EV走行時およびE−HV走行時において、第2変速線L2に基づいて変速機本体19の変速比を制御することから、高速ギヤ側を多用することになるため、モータジェネレータ10の回転数を高くし難いものとすることができる。
【0060】
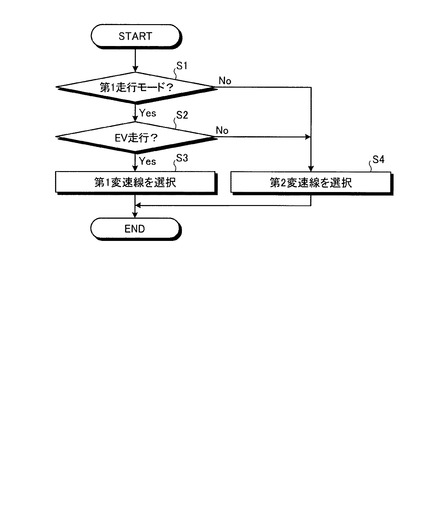
続いて、図4を参照して、ECU6により変速マップMにおける変速線を選択する制御動作について説明する。なお、変速線を選択する制御動作は、変速制御の実行中において繰り返し実行される。先ず、ECU6は、変速機本体19の変速制御を開始すると、第1走行モードであるか否かを判定する(ステップS1)。ECU6は、車両2の走行時においてモード切替制御を実行していることから、バッテリ24の蓄電量に基づいて、第1走行モードであるか否かを判定可能となっている。つまり、ECU6は、バッテリ24の蓄電量が予め設定された所定の蓄電量よりも大きい場合、第1走行モードと判定する(ステップS1:Yes)。一方、ECU6は、バッテリ24の蓄電量が予め設定された所定の蓄電量以下である場合、第2走行モードと判定する(ステップS1:No)。
【0061】
ECU6は、ステップS1において、第1走行モードと判定する(ステップS1:Yes)と、車両2がEV走行しているか否かを判定する(ステップS2)。ECU6は、第1走行モードにおいて、EV走行とHV走行との切り替えをアクセル開度に基づいて実行していることから、アクセル開度に基づいてEV走行であるか否かを判定可能となっている。つまり、ECU6は、第1走行モードにおいて、アクセル開度が所定のアクセル開度以下である場合、EV走行と判定する(ステップS2:Yes)。これにより、ECU6は、第1走行モードにおけるEV走行であるP−EV走行と判定する。一方、ECU6は、アクセル開度が所定のアクセル開度よりも大きい場合、HV走行と判定する(ステップS2:No)。これにより、ECU6は、第1走行モードにおけるHV走行であるP−HV走行と判定する。
【0062】
ECU6は、ステップS2において、EV走行と判定する(ステップS2:Yes)と、変速マップMの変速線として第1変速線L1を選択し(ステップS3)、この後、変速線を選択する制御動作を終了する。そして、ECU6は、第1変速線L1に基づいて変速機本体19の変速制御を実行する。一方、ECU6は、ステップS1において第2走行モードと判定する(ステップS1:No)、又はステップS2においてHV走行であると判定する(ステップS2:No)と、変速マップMの変速線として第2変速線L2を選択し(ステップS4)、変速線を選択する制御動作を終了する。そして、ECU6は、第2変速線L2に基づいて変速機本体19の変速制御を実行する。
【0063】
以上のように、本実施形態の構成によれば、第1走行モードのP−EV走行時における変速線と、第2走行モードのE−EV走行時における変速線とを異なるものとすることができる。つまり、第1走行モードのP−EV走行時における変速線を第1変速線L1とし、第2走行モードのE−EV走行時における変速線を第2変速線L2とすることができる。このため、第1走行モードは、第2走行モードに比してP−EV走行とP−HV走行との切り替えが少ない、つまり、エンジン7の始動頻度が少ないことから、P−EV走行時の変速線をモータジェネレータ10に適した第1変速線L1にすることで、効率良くモータジェネレータ10を作動させることができる。また、第2走行モードは、第1走行モードに比してE−EV走行とE−HV走行との切り替えが多い、つまり、エンジン7の始動頻度が多いことから、E−EV走行時の変速線をエンジン7に適した第2変速線L2にすることで、ドライバビリティの低下を抑制することができる。
【0064】
また、本実施形態の構成によれば、第1走行モードのP−HV走行時における変速線と、第2走行モードのE−HV走行時における変速線とを同じものとすることができる。つまり、第1走行モードのP−HV走行時における変速線を第2変速線L2とし、第2走行モードのE−HV走行時における変速線を第2変速線L2とすることができる。このため、P−HV走行時の変速線及びE−HV走行時の変速線をエンジン7に適した第2変速線L2にすることで、効率良くエンジン7を作動させることができ、燃費の向上を図ることができる。
【0065】
また、本実施形態の構成によれば、第2走行モードのE−EV走行時における変速線と、第2走行モードのE−HV走行時における変速線とを同じものとすることができる。つまり、第2走行モードのE−EV走行時における変速線を第2変速線L2とし、第2走行モードのE−HV走行時における変速線を第2変速線L2とすることができる。このため、第2走行モードは、第1走行モードに比してE−EV走行とE−HV走行との切り替えが多いことから、同じ第2変速線L2にすることで、エンジン始動と変速段の変更とが同時に発生する頻度を少なくでき、これにより、ドライバビリティの低下を抑制することができる。
【0066】
また、本実施形態の構成によれば、第1変速線L1を、第2変速線L2に比して高車速側で低開度側にすることができる。このため、第1変速線L1と第2変速線L2との間に動作点P1がある場合、第2変速線L2に基づく変速制御であれば、有段変速機は、変速比が小さい側のギヤ段(高速ギヤ)にすることができる。一方で、第1変速線L1に基づく変速制御であれば、有段変速機は、変速比が大きい側のギヤ段(低速ギヤ)にすることができる。これにより、第1変速線L1に基づく変速制御は、第2変速線L2に基づく変速制御に比して、変速機本体19の入力軸27の回転数が高くなる変速制御であることから、モータジェネレータ10の回転数を高くでき、効率良くモータジェネレータ10を作動させることが可能となる。また、第2変速線L2に基づく変速制御は、第1変速線L1に基づく変速制御に比して、変速機本体19の入力軸27の回転数が低くなる変速制御であることから、効率良くエンジン7を作動させることが可能となる。
【0067】
なお、本実施形態では、有段変速機に適用して説明したが、無段変速機に適用してもよい。この場合、第1走行モードにおいて、P−EV走行時に変速機本体19の入力軸27の回転数が高くなり、P−HV走行時に変速機本体19の入力軸27の回転数が低くなる第1変速パターンであることが好ましい。また、第2走行モードにおいて、E−EV走行時およびE−HV走行時に変速機本体19の入力軸27の回転数が低くなる第2変速パターンであることが好ましい。具体的には、変速マップとして、P−EV走行時に用いられる第1変速マップと、P−HV走行時、E−EV走行時およびE−HV走行時に用いられる第2変速マップとを用意する。このとき、第1変速マップは、第2変速マップに比して、変速機本体19の入力軸27の回転数が高くなるような変速マップである。そして、ECU6は、走行状態に応じて変速マップを適宜切り替え、切り替えた変速マップに基づいて無段変速機を変速制御することが好ましい。つまり、第1走行モードのP−EV走行時の第1変速パターンは、第2走行モードのE−EV走行時の第2変速パターンを選択した場合に比して、変速比が大きくなる変速パターンである。言い換えれば、第1走行モードと第2走行モードとで車両2の走行状態が同等であれば、第1走行モードのP−EV走行時における変速比が、第2走行モードの変速比と比較して大きい側となる。これにより、ECU6は、P−EV走行時において、モータジェネレータ10の回転数が高くなるように変速機本体19を変速制御でき、効率良くモータジェネレータ10を作動させることが可能となる。
【符号の説明】
【0068】
1 車両制御システム
2 車両
3 駆動輪
4 駆動装置
5 状態検出装置
6 ECU(制御装置)
7 エンジン(内燃機関)
9 K0クラッチ
10 モータジェネレータ(電動機)
11 トルクコンバータ
12 変速機
18 C1クラッチ
24 バッテリ
25 ロックアップクラッチ
【特許請求の範囲】
【請求項1】
車両の動力源となる内燃機関及び電動機と、
前記内燃機関又は前記電動機からの動力を変速して出力する自動変速機と、
前記内燃機関、前記電動機及び前記自動変速機を制御する制御装置と、を備えた車両制御システムであって、
前記制御装置は、
前記内燃機関の始動頻度が少ない前記車両の走行モードである第1走行モードと、前記第1走行モードに比して前記内燃機関の始動頻度が多い前記車両の走行モードである第2走行モードとを切り替えるモード切替制御と、
前記第1走行モードにおいて、第1変速パターンに基づく前記自動変速機の変速制御と、前記第2走行モードにおいて、第2変速パターンに基づく前記自動変速機の変速制御と、を実行し、
前記第1走行モードにおいて前記電動機の動力で走行する第1EV走行時の前記第1変速パターンと、前記第2走行モードにおいて前記電動機の動力で走行する第2EV走行時の前記第2変速パターンとは、異なっていることを特徴とする車両制御システム。
【請求項2】
前記第1走行モードにおいて前記内燃機関の動力及び前記電動機の動力で走行する第1HV走行時の前記第1変速パターンと、前記第2走行モードにおいて前記内燃機関の動力及び前記電動機の動力で走行する第2HV走行時の前記第2変速パターンとは、同じであることを特徴とする請求項1に記載の車両制御システム。
【請求項3】
前記第2EV走行時の前記第2変速パターンと、前記第2走行モードにおいて前記内燃機関の動力及び前記電動機の動力で走行する第2HV走行時の前記第2変速パターンとは、同じであることを特徴とする請求項1又は2に記載の車両制御システム。
【請求項4】
前記第1EV走行時の前記第1変速パターンは、前記第2EV走行時の前記第2変速パターンを選択した場合に比して、前記電動機の回転数が高くなる変速パターンであることを特徴とする請求項1ないし3のいずれか1項に記載の車両制御システム。
【請求項5】
前記自動変速機は、有段変速機であり、
前記制御装置は、変速線に基づいて前記変速制御を実行し、
前記第1変速パターンは、前記第1EV走行時の第1変速線を有し、
前記第2変速パターンは、前記第2EV走行時の第2変速線を有し、
前記第1変速線は、前記第2変速線に比して、高車速側でアクセル開度の小さい側となっていることを特徴とする請求項1ないし4のいずれか1項に記載の車両制御システム。
【請求項6】
前記自動変速機は、無段変速機であり、
前記第1EV走行時の前記第1変速パターンは、前記第2EV走行時の前記第2変速パターンを選択した場合に比して、変速比が大きくなる変速パターンであることを特徴とする請求項1ないし4のいずれか1項に記載の車両制御システム。
【請求項7】
車両の動力源となる内燃機関及び電動機と、前記内燃機関又は前記電動機からの動力を変速して出力する自動変速機と、を制御する制御装置であって、
前記内燃機関の始動頻度が少ない前記車両の走行モードである第1走行モードと、前記第1走行モードに比して前記内燃機関の始動頻度が多い前記車両の走行モードである第2走行モードとを切り替えるモード切替制御と、
前記第1走行モードにおいて、第1変速パターンに基づく前記自動変速機の変速制御と、前記第2走行モードにおいて、第2変速パターンに基づく前記自動変速機の変速制御と、を実行し、
前記第1走行モードにおいて前記電動機の動力で走行する第1EV走行時の前記第1変速パターンと、前記第2走行モードにおいて前記電動機の動力で走行する第2EV走行時の前記第2変速パターンとは、異なっていることを特徴とする制御装置。
【請求項1】
車両の動力源となる内燃機関及び電動機と、
前記内燃機関又は前記電動機からの動力を変速して出力する自動変速機と、
前記内燃機関、前記電動機及び前記自動変速機を制御する制御装置と、を備えた車両制御システムであって、
前記制御装置は、
前記内燃機関の始動頻度が少ない前記車両の走行モードである第1走行モードと、前記第1走行モードに比して前記内燃機関の始動頻度が多い前記車両の走行モードである第2走行モードとを切り替えるモード切替制御と、
前記第1走行モードにおいて、第1変速パターンに基づく前記自動変速機の変速制御と、前記第2走行モードにおいて、第2変速パターンに基づく前記自動変速機の変速制御と、を実行し、
前記第1走行モードにおいて前記電動機の動力で走行する第1EV走行時の前記第1変速パターンと、前記第2走行モードにおいて前記電動機の動力で走行する第2EV走行時の前記第2変速パターンとは、異なっていることを特徴とする車両制御システム。
【請求項2】
前記第1走行モードにおいて前記内燃機関の動力及び前記電動機の動力で走行する第1HV走行時の前記第1変速パターンと、前記第2走行モードにおいて前記内燃機関の動力及び前記電動機の動力で走行する第2HV走行時の前記第2変速パターンとは、同じであることを特徴とする請求項1に記載の車両制御システム。
【請求項3】
前記第2EV走行時の前記第2変速パターンと、前記第2走行モードにおいて前記内燃機関の動力及び前記電動機の動力で走行する第2HV走行時の前記第2変速パターンとは、同じであることを特徴とする請求項1又は2に記載の車両制御システム。
【請求項4】
前記第1EV走行時の前記第1変速パターンは、前記第2EV走行時の前記第2変速パターンを選択した場合に比して、前記電動機の回転数が高くなる変速パターンであることを特徴とする請求項1ないし3のいずれか1項に記載の車両制御システム。
【請求項5】
前記自動変速機は、有段変速機であり、
前記制御装置は、変速線に基づいて前記変速制御を実行し、
前記第1変速パターンは、前記第1EV走行時の第1変速線を有し、
前記第2変速パターンは、前記第2EV走行時の第2変速線を有し、
前記第1変速線は、前記第2変速線に比して、高車速側でアクセル開度の小さい側となっていることを特徴とする請求項1ないし4のいずれか1項に記載の車両制御システム。
【請求項6】
前記自動変速機は、無段変速機であり、
前記第1EV走行時の前記第1変速パターンは、前記第2EV走行時の前記第2変速パターンを選択した場合に比して、変速比が大きくなる変速パターンであることを特徴とする請求項1ないし4のいずれか1項に記載の車両制御システム。
【請求項7】
車両の動力源となる内燃機関及び電動機と、前記内燃機関又は前記電動機からの動力を変速して出力する自動変速機と、を制御する制御装置であって、
前記内燃機関の始動頻度が少ない前記車両の走行モードである第1走行モードと、前記第1走行モードに比して前記内燃機関の始動頻度が多い前記車両の走行モードである第2走行モードとを切り替えるモード切替制御と、
前記第1走行モードにおいて、第1変速パターンに基づく前記自動変速機の変速制御と、前記第2走行モードにおいて、第2変速パターンに基づく前記自動変速機の変速制御と、を実行し、
前記第1走行モードにおいて前記電動機の動力で走行する第1EV走行時の前記第1変速パターンと、前記第2走行モードにおいて前記電動機の動力で走行する第2EV走行時の前記第2変速パターンとは、異なっていることを特徴とする制御装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2013−95158(P2013−95158A)
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願番号】特願2011−236512(P2011−236512)
【出願日】平成23年10月27日(2011.10.27)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願日】平成23年10月27日(2011.10.27)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]