
車両制御システム
【課題】 本発明は、交差点における円滑で効率的な交通を実現することができる車両制御システムの提供を目的とする。
【解決手段】 本発明は、交差点に進入すべく交差点に接近する車両を検出する車両検出手段と、交差点への各車両の接近態様を少なくとも1つのパラメータとして、該各車両に対して交差点進入に関する優先度を設定する優先度設定手段と、設定した優先度に基づいて、優先度が相対的に高い車両が交差点に優先的に進入できるように、交差点への各車両の接近態様を制御する車両制御手段と、備えることを特徴とする。
【解決手段】 本発明は、交差点に進入すべく交差点に接近する車両を検出する車両検出手段と、交差点への各車両の接近態様を少なくとも1つのパラメータとして、該各車両に対して交差点進入に関する優先度を設定する優先度設定手段と、設定した優先度に基づいて、優先度が相対的に高い車両が交差点に優先的に進入できるように、交差点への各車両の接近態様を制御する車両制御手段と、備えることを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、交差点における円滑な交通を確保するための車両制御システムに関する。
【背景技術】
【0002】
従来から、路に設置したセンサから送信されるセンサ情報及び前記センサから送信されたセンサ情報を含む通信情報の少なくとも一方を用いて、衝突発生の有無を確率的手法によって予測し、この予測の結果、衝突が発生すると判定した場合には、運転者に向けて衝突発生にかかわる情報を提供し、又は車両が有する情報処理装置に向けて衝突を回避するための情報を送信することを特徴とする交差点衝突防止支援方法が知られている(例えば、特許文献1参照)。この交差点衝突防止支援方法においては、運転者のとる挙動のばらつきが影響して、確定的に予測することが困難な物理量を、当該物理量の過去のデータから計算した統計的な性質を利用して予測する手法を利用して、異なる方向から交差点に接近する車両間に衝突が発生することの予測を行う。
【0003】
また、スムーズな制動制御を行うための手法として、交差点通過ではなく追従走行の場合であるが、先行車などの環境から自車両に及ぼされる環境力という概念を導入し、環境力に応じた減速が実現されるように制動力制御を行って先行車に衝突しないための制動をスムーズに行う手法も知られている(例えば、特許文献2参照)。
【特許文献1】特開2002−140799公報
【特許文献2】特開平8−11579号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、上述の特許文献1による従来技術では、交差点における車両間の衝突を回避する観点から車両制御を行うものであり、交錯可能性の高い車両に対して、交差点における円滑で効率的な交通を実現する観点から優先度を設定するものでないため、交差点における円滑で効率的な交通制御を実現することが困難である。
【0005】
そこで、本発明は、交差点における円滑で効率的な交通を実現することができる車両制御システムの提供を目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するため、第1の発明は、交差点に進入すべく交差点に接近する車両を検出する車両検出手段と、
交差点への各車両の接近態様を少なくとも1つのパラメータとして、該各車両に対して交差点進入に関する優先度を設定する優先度設定手段と、を備えることを特徴とする。
【0007】
第2の発明は、第1の発明に係る車両制御システムにおいて、設定した優先度に基づいて、優先度が相対的に高い車両が交差点に優先的に進入できるように、交差点への各車両の接近態様を制御する車両制御手段を備えることを特徴とする。
【0008】
第3の発明は、第1の発明に係る車両制御システムにおいて、優先度設定手段は、各車両に搭載されたGPS信号に基づく車両位置測位装置の測位精度をパラメータとして、各車両に対して優先度を設定することを特徴とする。
【0009】
第4の発明は、第1の発明に係る車両制御システムにおいて、優先度設定手段は、ナビゲーションシステムの案内ルートに従って走行していない車両に対しては、低い優先度を設定することを特徴とする。
【0010】
第5の発明は、第1の発明に係る車両制御システムにおいて、優先度設定手段は、優先度の高い車両において運転者による制動操作が検出された場合、該車両に対して低い優先度を設定しなおすことを特徴とする。
【0011】
第6の発明は、第1の発明に係る車両制御システムにおいて、各自の車両から見て左側にある左側車両において交差点での右左折意思が検出された場合、優先度設定手段は、該左側車両に対して、該左側車両から見て右側にあり且つ交差点での直進意思が検出される右側車両よりも、低い優先度を設定することを特徴とする。
【0012】
第7の発明は、第1の発明に係る車両制御システムにおいて、優先度設定手段は、各車両の乗員に関する乗員情報をパラメータとして、各車両に対して優先度を設定することを特徴とする。
【0013】
第8の発明は、第7の発明に係る車両制御システムにおいて、
前記乗員情報は、乗員数を表すことが可能な情報を含み、
優先度設定手段は、乗員数の多い車両に対して高い優先度を設定することを特徴とする。
【0014】
第9の発明は、第7の発明に係る車両制御システムにおいて、前記乗員情報は、高齢者、初心者、急病人のような乗員の個々の属性を表すことが可能な乗員属性情報を含むことを特徴とする。
【0015】
第10の発明は、第1の発明に係る車両制御システムにおいて、優先度設定手段は、車両の個々の属性に関する車両属性情報をパラメータとして、各車両に対して優先度を設定することを特徴とする。
【0016】
第11の発明は、第10の発明に係る車両制御システムにおいて、前記車両属性情報は、車両の使用拠点に関する地理的情報を含み、
優先度設定手段は、使用拠点が交差点位置に近い車両に対して高い優先度を設定することを特徴とする。
【0017】
第12の発明は、第10の発明に係る車両制御システムにおいて、前記車両属性情報は、個々の車両毎に異なる車両IDであり、
優先度設定手段は、各車両IDと優先度との所定の対応関係に従って、各車両に対して、それぞれの車両IDに応じた優先度を設定することを特徴とする。
【0018】
第13の発明は、第10の発明に係る車両制御システムにおいて、前記車両属性情報は、車両の公共性を表すことが可能な情報を含み、
優先度設定手段は、公共性の高い車両に対して高い優先度を設定することを特徴とする。
【0019】
第14の発明は、第1の発明に係る車両制御システムにおいて、前記車両属性情報は、車両のサイズを表すことが可能な情報を含み、
優先度設定手段は、サイズの大きい車両に対して高い優先度を設定することを特徴とする。
【0020】
第15の発明は、第1〜13の何れかの発明に係る車両制御システムにおいて、前記車両検出手段、前記優先度設定手段及び前記制御手段の少なくとも一部の動作が、各車両に搭載される通信機能付き専用車載機器により協働して実現されることを特徴とする。
【0021】
第16の発明は、第15の発明に係る車両制御システムにおいて、当該車両制御システムによる上記車両制御が適用されるサービス交差点に対する、前記専用車載機器を搭載していない非搭載車両の通行が抑制ないし禁止されるように、非搭載車両の通行ルートを案内するナビゲーション手段を備えることを特徴とする。
【0022】
第17の発明は、第16の発明に係る車両制御システムにおいて、前記ナビゲーション手段は、前記サービス交差点に関する最新の交差点情報を収録した地図データベースを備えることを特徴とする。
【0023】
第18の発明は、第15の発明に係る車両制御システムにおいて、優先度設定手段は、前記専用車載機器を搭載していない非搭載車両に対して、前記専用車載機器を搭載している車両よりも低い優先度を設定することを特徴とする。
【0024】
第19の発明は、第18の発明に係る車両制御システムにおいて、前記非搭載車両に対して交差点への進入の可否情報を、前記非搭載車両の運転者が目視できるような態様で提供する情報提供手段が、交差点に設置されることを特徴とする。
【0025】
第20の発明は、第16の発明に係る車両制御システムにおいて、前記ナビゲーション手段による通行ルートの案内に従わずに前記サービス交差点を通行した非搭載車両を特定する監視手段が、交差点に設置されることを特徴とする。
【発明の効果】
【0026】
本発明によれば、交差点における円滑で効率的な交通を実現することができる車両制御システムを得ることができる。
【発明を実施するための最良の形態】
【0027】
以下、図面を参照して、本発明を実施するための最良の形態の説明を行う。
【0028】
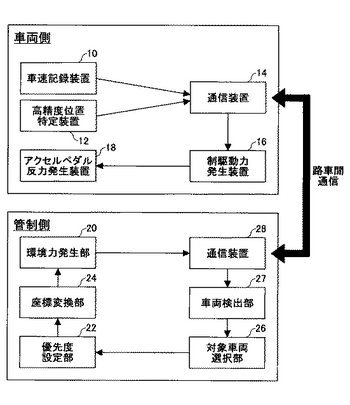
図1は、本発明による車両制御システムの一実施態様を示すシステム構成図である。図1には、車両側構成と、管制側構成とが示されている。図1に示す車両側構成は、1台の車両に係る構成であるが、本システムに関連する各車両には、同様の構成が搭載される。同様に、図1に示す管制側構成は、1つの交差点に係る構成であるが、本システムに関連する各交差点には、同様の構成が設定される。
【0029】
図1に示すように、車両側構成は、車両に搭載され、車速記録装置10、高精度位置特定装置12、通信装置14、制駆動力発生装置16、及び、アクセルペダル反力発生装置18を備える。
【0030】
車速記録装置10は、例えば車輪速センサのセンサ出力に基づいて車両の速度履歴を記録する。
【0031】
高精度位置特定装置12は、例えばRTK−GPS(リアルタイム・キネマチック全地球測位システム)や搬送波位相式測位法などによる高精度測位機能を備える。高精度位置特定装置12は、GPS測位による測位結果に基づいて、自車両の方位や現在位置を特定する。
【0032】
通信装置14は、他車両及び/又は管制側と通信し、いわゆる車車間通信及び/又は路車間通信を実現する。アンテナの性能や形状並びに通信に利用する方式や周波数帯域などについては特段の制限はなく任意でよい。車車間通信及び路車間通信について様々な手法や装置構成が既に提案されており、通信装置14の更なる具体例は当業者には明らかである。
【0033】
制駆動力発生装置16は、車輪毎に配されるブレーキ(機械ブレーキ)や、モータージェネレータによる回生ブレーキを含む制動力発生装置を含む。機械ブレーキの場合、各ブレーキは、それぞれに対して設けられるアクチュエータにより、運転者によるブレーキペダルの操作量に応じて電気的に制御され、また、必要に応じて、自動的に各車輪毎に個別に制御される。制駆動力発生装置16は、また、エンジンや電動モータのような駆動力発生装置を含む。尚、電動モータは、2次電池や燃料電池を電源として動作するものであってよい。
【0034】
本実施態様では、制駆動力発生装置16は、後述するように、管制側から通信装置14を介して受信する制御信号に応じて、制動力及び/又は駆動力を発生させる。尚、かかる介入による加減速制御中においても、運転者による自主的なブレーキ操作が行われた場合には、ブレーキ操作による制動が優先的に実現される。これは、介入による加減速制御中においても、特に安全面を重視して、運転者による制動意思を最も優先させるべきであるからである。
【0035】
アクセルペダル反力発生装置18は、運転者が足で操作するアクセルペダルに設定されたアクチュエータにより、アクセルペダルの反力を制御して、制駆動力発生装置16による介入制動状態に応じた大きさのアクセルペダル反力を発生させる。アクセルペダル反力の制御については様々な手法や装置構成が既に提案されており、具体例は当業者には明らかである。
【0036】
管制側構成は、インフラとして設置される基地局又は中継局であり、交差点(特に信号機のない交差点。)毎に配置されてもよいし、複数の交差点を統括するように配置されてもよい。
【0037】
管制側構成は、図1に示すように、環境力発生部20、優先度設定部22、座標変換部24、対象車両選択部26、車両検出部27、及び、通信装置28を備える。車両側と管制側とは、それぞれの通信装置14及び通信装置28を介して双方向通信(路車間通信)可能に構成される。
【0038】
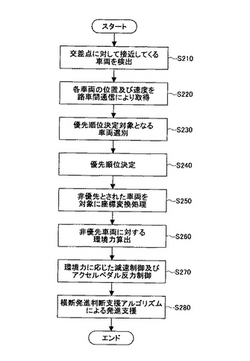
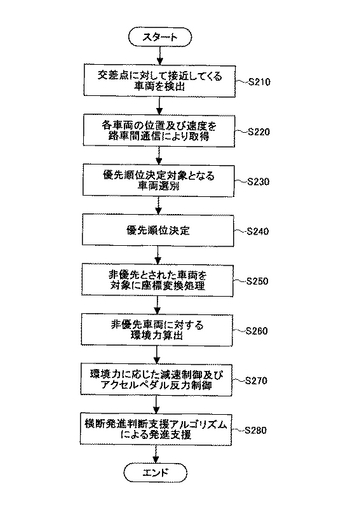
次に図2を参照して、本発明による車両制御システムにおいて実現される主要処理の流れを説明する。図2に示す交差点通過判断アルゴリズムは、交差点における円滑で効率的な交通を実現する観点から構築されたものであり、交差点に進入してくる複数の車両を時間的にずらして該交差点を通過させるものである。
【0039】
以下の図2を参照した説明では、基本的に、車両側と管制側とが協働して、交差点通過判断アルゴリズムを実現している。しかしながら、車両側に各種機能部20〜26を設定し、複数の車両が協働して、車車間通信を介して自律的に交差点通過判断アルゴリズムを実現してもよいし、また、車両側に各種機能部20〜26の一部を設定することも可能である。尚、車両側に各種機能部20〜26の全てを設定する場合には、管制側、即ちインフラ自体が不要となる。
【0040】
図2を参照するに、管制側は、通信装置28による各車両との路車間通信により、車両検出部27により交差点に接近してくる車両を検出する(S210)。例えば、管制側は、交差点中心から所定エリア又は所定時間半径内の車両を検出する。尚、複数の車両が協働して、車車間通信を介して自律的に交差点通過判断アルゴリズムを実現する構成では、各車両は、それぞれの車両位置情報と道路情報とに基づいて自車両の交差点への接近を検出する。
【0041】
管制側は、通信装置28による各車両との路車間通信により、検出した各車両の位置及び速度を取得する(S220)。尚、複数の車両が協働して、車車間通信を介して自律的に交差点通過判断アルゴリズムを実現する構成では、各車両は、車車間通信を介して、他車両の位置及び速度を取得する。
【0042】
次いで、管制側の対象車両選択部26は、交差点に接近してくる各車両のうち、交錯の可能性のある車両を選択する(S230)。ここで、用語“交錯”とは、“衝突”とは異なる。即ち、本実施態様では、以下詳説する如く、交差点手前で設定される適切な優先順位に従って各車両の交差点への接近態様が事前に制御されるので、交差点において衝突が起こる可能性は理論的にはゼロであり、従って、交錯の可能性のある車両とは、「交差点に対してそれぞれ異なる方向から接近して進入する車両」程度の意味しか持たない。交錯の可能性のある車両の選択の具体例を挙げると、例えば、ある着目車両に対して同じ車線を同じ方向に走行中の車両、着目車両が交差点を直進する場合の対向車両、着目車両の走行道路と立体交差した道路を走行中の車両、道路以外の場所を走行中の(例えば道路沿いの駐車場内を徐行中の)車両、及び、交差点から遠ざかって行っている車両などは対象外となり、着目車両と同様、交差点に向かって進行中の車両であって、着目車両との速度ベクトルの内積が0又は0に近い車両が選択対象となる。尚、複数の車両が協働して、車車間通信を介して自律的に交差点通過判断アルゴリズムを実現する構成では、自車両を着目車両として、該自車両と交錯の可能性のある他車両が選択されることになる。
【0043】
次いで、管制側の優先度設定部22は、所定の優先度設定アルゴリズムに従って、交錯可能性のある各車両に対して優先順位ないし優先度(以下、単に「優先順位」という。)を決定する(S240)。優先度設定アルゴリズムは、基本的には、交差点における円滑で効率的な交通を実現する観点から構築される。優先順位は、2段階(即ち、優先権の有り、無し)で決定されてもよいし、3段階以上で決定されてもよい。以下では、優先順位を高い低いと表現するが、優先順位が2段階で表される構成の場合、高い優先順位とは優先権がある場合であり、低い優先順位とは優先権がない場合である。優先順位が3段階で表される構成の場合、高い優先順位とは、相対的に高いという程度、或いは、それよりも低い優先順位があるという程度の意味であり、特に明示しない限り、優先順位が最上位であることを必ずしも意味しない。また、以下で用いられる用語 “非優先車両”とは、優先権がない車両(優先順位が2段階で表される構成の場合。)、或いは、優先順位が最上位でない車両を意味し、“最優先車両” とは、優先権がある車両(優先順位が2段階で表される構成の場合。)、或いは、優先順位が最上位である車両を意味する。
【0044】
本ステップ240における優先順位を決定する処理は、交差点に進入しているすべての車両において個々に行われる。尚、複数の車両が協働して、車車間通信を介して自律的に交差点通過判断アルゴリズムを実現する構成では、同じ交差点に向けて進行している交錯可能性を有する複数の車両は、通信により互いの位置情報(及び車速情報)を相互に把握していると共に、すべての車両が同じ優先度設定アルゴリズムに基づいて優先順位を決定するため、いずれの車両においても同じ結論が得られ、矛盾は生じない。
【0045】
優先順位決定処理は、全車両に共通であって矛盾が生じない限り、任意の優先度設定アルゴリズムに基づくものであってよい。優先順位決定処理は、各車両に関して、その車両が交差点を通過するまで繰り返し実行される。なぜなら、例えばある車両が前方障害物等により急減速又は急停止等した場合や道路沿いの駐車場等に入った場合に優先順位が変動し得るからである。また、最優先車両が交差点を通過し終えると、他の車両の優先順位が繰り上げられ、新たな最優先車両が決定される。
【0046】
このようにして交錯可能性を有する複数の車両について優先順位が決定されると、最優先車両以外は非優先車両として最優先車両が交差点を通過するまで交差点を通過しないように時間差を生じさせるための処理に移行する。尚、優先順位が決定されると、各車両において、運転者に当該優先順位が報知されてもよい。
【0047】
即ち、優先順位付け(S240)後、座標変換部24は、非優先とされた車両を対象に座標変換処理を行う(S250)。尚、最優先とされた車両は、管制側による減速のための制御介入が何ら実行されず、運転者の操作するままの車速が許容される。この座標変換処理では、各対象車両の位置及び速度が、交差点形状に応じた直交座標系に変換される(即ち、各対象車両が、それぞれの速度ベクトルを持った座標点に変換される。)。
【0048】
次いで、管制側の環境力発生部20は、非優先とされた車両を対象に環境力アルゴリズムを適用する。具体的には、環境力発生部20は、最優先車両に係る直交座標変換された位置及び速度を、最優先車両によりも優先順位が低い車両の走行道路上(即ち、最優先車両と交錯可能性のある車両が存在する道路上)に写像し、該写像した最優先車両を先行車両として見立て、後続の車両に関する追従環境力を算出する(S260)。追従環境力は、特開平8−115779号公報(特許文献2)に記載されるように、後続車両が先行車両に衝突しないように場から受ける環境力である。したがって、この仮想先行車両から追従環境力を受けるものとして仮想先行車両の後続車両(非優先車両)を減速させることにより、最優先車両が最優先車両より優先順位が高い車両と交差点において交錯しないようにすることができる。
【0049】
ここで、上記特許文献2によれば、追従環境力Cは、
【0050】
【数1】

と表される(特許文献2の段落[0055]の記載参照)。ここで、aは運転者固有の最大加速度であり、x及びx’は非優先車両の位置及び速度であり、x−1及びx’−1は先行車両の位置及び速度であり、Tは運転者固有の車間時間であり、Lは運転者固有の停止時車間距離であり、pは環境条件の有効な範囲の大きさを決めるパラメータである。
【0051】
ここで、写像された仮想先行車両の位置及び速度をy−1及びy’−1とすると、上記式(1)は、仮想先行車両に対して、
【0052】
【数2】
と書き換えることができる。ここで、Tcrossは運転者固有の交錯車間時間であり、Lcrossは運転者固有の交錯停止時車間距離である。
【0053】
y−1及びy’−1は、直交座標変換により、
【0054】
【数3】
【0055】
【数4】
である。ここで、y及びy’は仮想先行車両の位置及び速度であり、(Xsig,Ysig)は交差点位置である。ここで、式(4)の右辺には2階微分が入っているため、これを解くと解が2つ現れ、一方の解が発散してしまう。そこで、本実施態様では、便宜上、2階微分の項を丸めて、式(4)を
【0056】
【数5】
と変形して用いるものとする。これによる実質的な問題は生じない。
【0057】
このようにして、最優先車両を仮想先行車両とした場合に追従環境力を受ける各車両に対して、それぞれの追従環境力が算出されると、管制側は、この算出された環境力に応じて、各車両の制駆動力発生装置16に対して、それぞれ発生させるべき制動力を指示する(S270)。これに応じて各車両の制駆動力発生装置16が作動し、算出された環境力に応じた減速度及び/又は車速が実現され、各車両において、必要に応じた減速、徐行ないし一時停止線での停止が実現される。尚、各車両の追従環境力は、上述の算出方法の他、それぞれの車両の1つ上の優先順位を持つ車両を仮想先行車両として算出されてもよいし、該車両よりも上位順位の全ての車両をそれぞれ仮想先行車両として算出した各追従環境力を、積算することで算出されてもよい。
【0058】
このステップ270では、アクセルペダル反力発生装置18は、車両側において速度制御中である旨を車両乗員(特に運転者)に伝達すべく、制駆動力発生装置16が発生する制動力に応じて、アクセルペダル反力を制御する。これにより、運転者(及び他の乗員)は、自動的にブレーキが掛かったことについて視覚的、聴覚的、及び/又は触覚的に伝達を受けるため、事態を把握できる。
【0059】
各車両を時間差をもって交差点を円滑に通過させるために、下位の方の優先順位の車両が一時停止することも許容される。しかしながら、交通の円滑化の観点からは、できる限り一時停止する車両が生じないように非優先車両の車速が制御されることが好ましい。
【0060】
もし一時停止した場合には、その車両については、横断発進判断支援アルゴリズムにより、一時停止状態から発進する際の発進支援が実行される(S280)。横断発進判断支援アルゴリズムについては様々な手法が既に提案されており、具体例は当業者には明らかである。例えば、簡易的には、管制側は、路車間通信により、待機中の各車両の進入方向(直進・右左折)を把握し、待機中の車両の優先順位が最上位になったときに、該車両のアクセルペダル反力制御が解除されるようアクセルペダル反力発生装置18に対して指示を出して、運転者に発進許可状態を把握させてもよい。
【0061】
このように、本実施態様によれば、交錯可能性を有する2台以上の車両がそれぞれの車両の減速度を最小限に留めながら交差点を時間差をもって接触・衝突することなく通行することができるため、信号機のない交差点において同一の2次元平面上に存在しながらあたかも交差する道路が立体交差しているかのような円滑な交通が実現される。
【0062】
次に、上述の基本実施態様を前提として、優先度設定部22による特徴的な優先度設定態様について、幾つかの実施例に分けて説明していく。
【実施例1】
【0063】
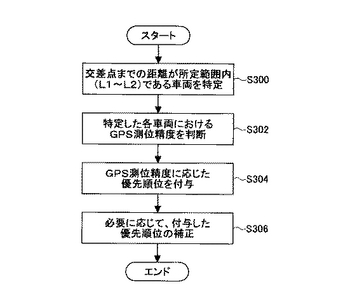
図3は、実施例1に係る優先度設定アルゴリズム(図2のS240)の主要部を示すフローチャートである。尚、この実施例1に係る優先度設定アルゴリズムは、上述又は後述の他の優先度設定アルゴリズムと背反するものでなく、任意の組み合わせで適用可能である。
【0064】
先ず、優先度設定部22は、各車両との路車間通信を介して取得した現在位置情報(各車両における高精度位置特定装置12の測位結果。)に基づいて、交差点までの距離がL1〜L2[m]である車両を特定する(S300)。ここで、所定距離L1は、優先度の設定が行われるべきポイントであり、交差点の素性・特徴(道路幅や隣接する交差点との距離、法定速度等)に応じて予め決定される。所定距離L2は、所定距離L1に、GPS測位誤差を考慮した余裕距離ΔLを足し合わせたものである(即ち、L2=L1+ΔL)。但し、交差点よりも所定距離L2手前の地点は、環境力アルゴリズムが適用されるエリアの開始地点であることが好ましい。
【0065】
優先度設定部22は、特定した各車両に対して、それらの車両に搭載される高精度位置特定装置12のGPS測位精度を判断する(S302)。GPS測位精度は、各車両における高精度位置特定装置12の測位精度であり、それぞれの高精度位置特定装置12において用いられている測位方法に応じて決定される。例えば、2重位相差を取る搬送波位相式測位法による高精度位置特定装置12は、1重位相差しか取らない搬送波位相式測位法による高精度位置特定装置12よりも、GPS測位精度が高いと判断される。尚、優先度設定部22は、各車両における高精度位置特定装置12のGPS測位精度に関する情報を、各車両との路車間通信を介して毎回取得してもよいし、各車両のGPS測位精度を取得したときに各車両のIDに対応付けてマップに記録しておき、以後、マップに基づいて各車両のGPS測位精度を判断してもよい。
【0066】
次いで、優先度設定部22は、交差点までの距離がL1〜L2の範囲内の各車両に対して、それらの車両に搭載される高精度位置特定装置12のGPS測位精度に応じた優先順位を付与する(S304)。この際、精度の高い高精度位置特定装置12を搭載する車両ほど高い優先順位が付与される。このようにして、各車両は、交差点手前L2以内に入った段階で優先順位が付与されていく。従って、本ステップ304で付与される優先順位は、上記ステップ300で特定された車両間でのみ有効である。しかしながら、優先度設定部22は、前回周期以前の本ステップ304の処理により既に付与している優先順位(即ち、今回の優先順位付与処理の時点で既に交差点までの距離がL1内になった車両に対して前回処理時に付与した優先順位。)を考慮して、交差点までの距離L2以内の全車両間で通用する優先順位を付与することとしてもよい。この場合、交差点までの距離がL1〜L2の範囲内の各車両のうち、GPS測位精度の最も高い車両には、交差点までの距離がL1内にあり且つ未だ交差点を通過し終えていない各車両に既に付与している優先順位(即ち、付与済みの優先順位)のうちの、最低優先順位よりも1つだけ順位の低い優先順位が付与されることになる。
【0067】
尚、このようにして優先順位が付与されると、各車両には、その優先順位に応じて環境力アルゴリズムが適用されることになる(図2のS270参照)。
【0068】
次いで、優先度設定部22は、その後変化する各車両の交差点までの距離と、上記ステップ304で付与した優先順位との関係を監視し、必要に応じて、付与した優先順位の補正を行う(S306)。例えば、GPS測位精度が劣る故に低い優先順位が付された車両が、高い優先順位の車両よりも、余裕距離ΔL以上交差点に近くなった場合、優先度設定部22は、これらの2車両の優先順位の入れ替えを行う。即ち、GPS測位精度が劣る故に低い優先順位が付された車両に対して、高い優先順位が付与される。尚、かかる優先順位の補正処理は、原則的には必要でなく、あくまでフェールセーフとして機能する。なぜならば、上述の如く、低い優先順位が付された車両は、その時点から上述の如く環境力の作用により減速を強いられるため(図2のS270参照)、それ以上大きな減速度で高い優先順位の車両が自主的に減速しない限り、当該高い優先順位の車両よりも余裕距離ΔL以上交差点に近くなることがないからである。
【0069】
このように本実施例によれば、交差点に早く近づいた方に高い優先順位を付与するルールを基本としつつ、各車両における高精度位置特定装置12のGPS測位精度の相違が補償されるので、各車両の高精度位置特定装置12のGPS測位精度の相違による不公平や不都合を是正して、適切な優先順位を付与することができる。また、高い精度の高精度位置特定装置12を搭載する車両に対して高い優先順位を付与することで、高機能の高精度位置特定装置12を搭載する故に却って低い優先順位が付与されるという不条理が防止されると共に、制御の信頼性も高めることができる。
【0070】
尚、複数の車両が協働して、車車間通信を介して自律的に交差点通過判断アルゴリズムを実現する構成では、各車両は、それぞれの交差点までの距離が、自車両の高精度位置特定装置12による測位結果に基づいてL2以内になった時点で、車車間通信により、交差点までの距離がL1〜L2の範囲内にある他車両と互いのGPS測位精度を比較し合うことで、優先順位を決定し合えばよい。この場合、例えば他車両における高精度位置特定装置12のGPS測位精度が自車両の同GPS測位精度よりも高ければ、他車両に自車両よりも高い優先順位が設定されることになる。また、同様に、各車両は、その後変化する各車両の交差点までの距離と、優先順位との関係を監視し、必要に応じて優先順位の補正を行えばよい。
【実施例2】
【0071】
図4は、実施例2に係る優先度設定アルゴリズム(図2のS240)の主要部を示すフローチャートである。尚、この実施例2に係る優先度設定アルゴリズムは、上述又は後述の他の優先度設定アルゴリズムと背反するものでなく、任意の組み合わせで適用可能である。
【0072】
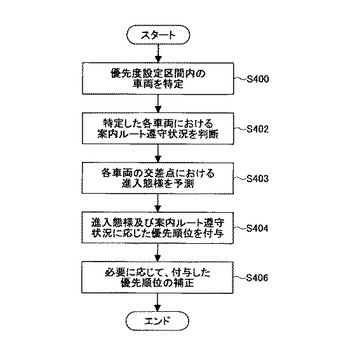
先ず、優先度設定部22は、各車両との路車間通信を介して取得した現在位置情報に基づいて、優先度設定区間内に存在する車両を特定する(S400)。ここで、優先度設定区間は、上述の実施例1と同様、交差点手前L1〜L2[m]の範囲内の区間としてよい。尚、ここでは、説明の複雑化を防止するため、各車両における高精度位置特定装置12のGPS測位精度は同等であるとするが、上述の実施例1のようにGPS測位精度の相違を考慮することは可能である。
【0073】
優先度設定部22は、優先度設定区間内の各車両に対して、それらの車両に搭載されるナビゲーションシステムによるそれぞれの案内ルートに従って走行しているか否かを判断する(S402)。尚、ナビゲーションシステムの案内ルートとは、公知の如く、ユーザによる設定された目的地に応じて探索され、ナビゲーションシステムのディスプレイ上の地図に表示されるルート(推奨経路)である。
【0074】
次いで、優先度設定部22は、優先度設定区間内に存在する各車両に対して、各車両の交差点における進入態様を予測する(S403)。ここで、進入態様には、交差点を直進する態様、左折する態様、及び、右折する態様の3通りがある。ナビゲーションシステムの案内ルートに従って走行している車両に対しては、方向指示器により異なる進入態様が意思表示されている場合を除き、案内ルートに従った進入態様が判断される(即ち、案内ルートが交差点の直進を指示するものであれば、その車両の進入態様は“直進”と判断される)。ナビゲーションシステムの案内ルートに従って走行していない車両に対しては、方向指示器により異なる進入態様が意思表示されている場合を除き、交差点を直進するものと判断される。
【0075】
次いで、優先度設定部22は、上記ステップ402,403における判断結果に応じた優先順位を付与する(S404)。この際、優先度設定部22は、直進が予測される車両に対しては右左折が予測される車両よりも高い優先順位を付与する。これは、右左折を行う車両は交差点手前で減速が必要となるので、かかる車両に対して環境力を作用させた方がエネルギ効率が良いからである。但し、直進が予測される車両が複数存在する場合、案内ルートに従って走行している車両に対しては、案内ルートに従って走行していない車両よりも高い優先順位が付与される。また、直進が予測され、且つ、案内ルートに従って走行している車両が複数存在する場合には、交差点までの距離がL1に近い車両から順に高い優先順位が付与される。同様に、直進が予測され、且つ、案内ルートに従って走行していない車両が複数存在する場合には、交差点までの距離がL1に近い車両から順に高い優先順位が付与される(但し、上述の如く、案内ルートに従って走行している車両よりも低い優先順位が付与される。)。尚、本ステップ404で付与される優先順位は、上記ステップ400で特定された車両間でのみ有効である。しかしながら、優先度設定部22は、前回周期以前の本ステップ404の処理により既に付与している優先順位(即ち、今回の優先順位付与処理の時点で既に交差点までの距離がL1内になった車両に対して、前回処理時に付与した優先順位。)を考慮して、交差点までの距離L2以内の全車両間で通用する優先順位を付与することとしてもよい。
【0076】
尚、このようにして優先順位が付与されると、各車両には、その優先順位に応じて環境力アルゴリズムが適用されることになる(図2のS270参照)。
【0077】
次いで、優先度設定部22は、その後変化する各車両の交差点までの距離と、上記ステップ404で付与した優先順位との関係を監視し、必要に応じて、付与した優先順位の補正を行う(S406)。例えば、低い優先順位が付された車両が、高い優先順位の車両よりも、余裕距離ΔL以上交差点に近くなった場合、優先度設定部22は、これらの2車両の優先順位の入れ替えを行う。即ち、低い優先順位が付された車両に対して、高い優先順位が付与される。尚、かかる優先順位の補正処理は、原則的には必要でなく、あくまでフェールセーフとして機能する。なぜならば、上述の如く、低い優先順位が付与された車両は、その時点から上述の如く環境力の作用により減速を強いられるため(図2のS270参照)、それ以上大きな減速度で高い優先順位の車両が自主的に減速しない限り(例えば、直進を予定していたが急きょ右折しようとして減速した場合など)、当該高い優先順位の車両よりも余裕距離ΔL以上交差点に近くなることがないからである。
【0078】
このように本実施例によれば、直進が予定される車両に対して、右左折が予定される車両よりも高い優先順位を付与するルールを基本としつつ、案内ルートに従って走行していない車両には低い優先順位を付与することで、案内ルートに従って走行していない車両における不確定な進入態様の影響を受け難いロバストな制御を実現することができる。即ち、案内ルートに従って走行していない車両は、案内ルートに従って走行している車両よりも、交差点における進入態様の予測が困難であり、それ故に明確な意思表示がない限り直進すると予測せざるを得ないが、直進が右左折に優先するルールでは、案内ルートに従って走行している車両の急な右左折の意思表示により、優先順位の急な変動が必要となり、或いは、他の車両に対して既に行った減速制御が無駄となる(無駄なエネルギーロスが生ずる)。本実施例では、案内ルートに従って走行していない車両には当初から低い優先順位を付与しておくことで、かかる不都合を効果的に防止することができる。
【0079】
尚、複数の車両が協働して、車車間通信を介して自律的に交差点通過判断アルゴリズムを実現する構成では、各車両は、優先度設定区間内で、車車間通信により、互いのルート案内遵守状況を比較し合うことで、優先順位を決定し合えばよい。また、同様に、各車両は、その後変化する各車両の交差点までの距離と、優先順位との関係を監視し、必要に応じて優先順位の補正を行えばよい。
【実施例3】
【0080】
図5は、実施例3に係る優先度設定アルゴリズム(図2のS240)の主要部を示すフローチャートである。尚、この実施例3に係る優先度設定アルゴリズムは、上述又は後述の他の優先度設定アルゴリズムと背反するものでなく、任意の組み合わせで適用可能である。本実施例3は、上述の如く優先順位が決まった後に必要に応じて行う優先順位の変動方法に関するものである。従って、本実施例3は、上述の実施例1,2と組み合わせた場合、上記ステップ306,406における処理に関連する。
【0081】
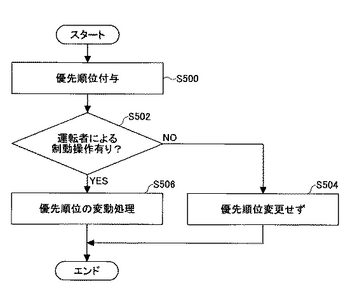
尚、本実施例3では、前提として、優先順位が付与されると、各車両では運転者による自主的な加速操作は原則的に禁止され、運転者による自主的な制動操作のみが許容される。
【0082】
上述の如く適切なルールに従って優先順位を付与した(S500)後、優先度設定部22は、優先順位を付与した各車両において、運転者による制動操作が行われたか否かを監視する(S502)。運転者による制動操作が行われていない場合、原則として、各車両の優先順位は変更されることなく保持される(S504)。一方、運転者による制動操作が行われた場合、優先度設定部22は、制動操作が行われた車両(以下、「制動車両」という。)の優先順位を判断し、当該優先順位よりも低い優先順位が付与された車両(2台以上でも可。)と、制動車両との間で、優先順位の変動処理を行う(S506)。即ち、制動車両の優先順位を下げ、それに伴い、制動車両よりも低い優先順位が付与された車両の優先順位を上げる。また、制動車両の後続車両に対しても、制動車両の制動による影響を受けるため、優先順位が補正されてよい。
【0083】
このように本実施例によれば、運転者による制動操作が行われる場合を想定して、優先順位を付与した後にも優先順位の再調整を行うことで、優先順位の決定態様に柔軟性を持たせることができ、優先順位付与後の運転者による自主的な制動操作に柔軟に対処しつつ、それにより受ける交通の円滑性への影響を最小限に抑えることができる。
【0084】
尚、複数の車両が協働して、車車間通信を介して自律的に交差点通過判断アルゴリズムを実現する構成では、優先順位決定後に制動操作が行われた車両は、当該車両によりも優先順位が低い車両に対して、車車間通信を介して自己の優先順位の放棄・譲渡を行えばよい。
【実施例4】
【0085】
図6は、実施例4に係る優先度設定アルゴリズム(図2のS240)の主要部を示すフローチャートである。尚、この実施例4に係る優先度設定アルゴリズムは、上述又は後述の他の優先度設定アルゴリズムと背反するものでなく、任意の組み合わせで適用可能である。
【0086】
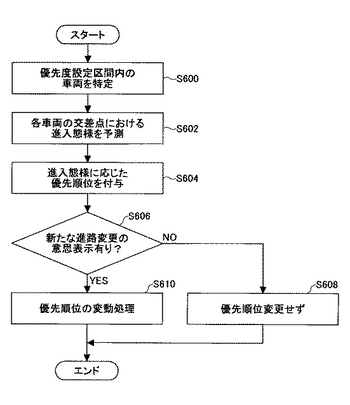
先ず、優先度設定部22は、各車両との路車間通信を介して取得した現在位置情報に基づいて、優先度設定区間内に存在する車両を特定する(S600)。ここで、優先度設定区間は、上述の実施例1と同様、交差点手前L1〜L2[m]の範囲内の区間としてよい。尚、ここでは、説明の複雑化を防止するため、各車両における高精度位置特定装置12のGPS測位精度は同等であるとするが、上述の実施例1のようにGPS測位精度の相違を考慮することは可能である。
【0087】
次いで、優先度設定部22は、優先度設定区間内に存在する各車両に対して、各車両の交差点における進入態様を予測する(S602)。上述の如く、進入態様には、交差点を直進する態様、左折する態様、及び、右折する態様の3通りがある。ナビゲーションシステムの案内ルートに従って走行している車両に対しては、方向指示器により異なる進入態様が意思表示されている場合を除き、案内ルートに従った進入態様が判断される。ナビゲーションシステムの案内ルートに従って走行していない車両に対しては、方向指示器により異なる進入態様が意思表示されている場合を除き、交差点を直進するものと判断される。
【0088】
次いで、優先度設定部22は、各車両の交差点における進入態様の予測結果に応じて、優先順位を付与する(S604)。この際、優先度設定部22は、直進が予測される車両に対しては、右左折が予測される車両よりも高い優先順位を付与する。これは、右左折を行う車両は交差点手前で減速が必要となるので、かかる車両に対して環境力を作用させた方が効率的であるからである。また、優先度設定部22は、直進が予測される車両が複数存在する場合、各自の車両から見て左側にある左側車両に対して高い優先順位を付与する。即ち、左方優先の原則が適用されて、左側から来る車両が優先される。尚、本ステップ604で付与される優先順位は、上記ステップ600で特定された車両間でのみ有効である。しかしながら、優先度設定部22は、前回周期以前の本ステップ604の処理により既に付与している優先順位(即ち、今回の優先順位付与処理の時点で既に交差点までの距離がL1内になった車両に対して、前回処理時に付与した優先順位。)を考慮して、交差点までの距離L2以内の全車両間で通用する優先順位を付与することとしてもよい。
【0089】
尚、このようにして優先順位が付与されると、各車両には、その優先順位に応じて環境力アルゴリズムが適用されることになる(図2のS270参照)。
【0090】
次いで、優先度設定部22は、直進が予測されて高い優先順位を付与した各車両において、進路変更の意思表示が新たに行われたか否かを監視する(S606)。直進が予測されている車両において、進路変更の意思表示が新たに行われていない場合、原則として、各車両の優先順位は変更されることなく保持される(S608)。一方、優先度設定部22は、進路変更の意思表示(即ち、右左折の意思表示)が新たに示された場合、当該車両(以下、「進路変更車両」という。)の優先順位を判断し、当該優先順位よりも低い優先順位が付与された車両(2台以上でも可。)と、当該進路変更車両との間で、優先順位の変動処理を行う(S610)。即ち、進路変更車両の優先順位を下げ、それに伴い、制動車両よりも低い優先順位が付与された車両、特に進路変更車両から見て右側にあり且つ交差点での直進意思が検出される右側車両、の優先順位を上げる。また、制動車両の後続車両に対しても、制動車両の制動による影響を受けるため、優先順位が補正されてよい。
【0091】
このように本実施例によれば、直進且つ左側車両優先のルールを基本としつつ、当該ルールに従って優先順位を付与した後に新たな進路変更の意思表示が行われる場合を想定して、優先順位を付与した後にも優先順位の再調整を行うことで、新たな進路変更の意思表示に柔軟に対処しつつ、それにより受ける交通の円滑性への影響を最小限に抑えることができる。
【0092】
尚、複数の車両が協働して、車車間通信を介して自律的に交差点通過判断アルゴリズムを実現する構成では、各車両は、優先度設定区間内で、車車間通信により、互いの進入態様(進路)を比較し合うことで、優先順位を決定し合えばよい。また、優先順位決定後に進路変更の意思表示を行った車両は、当該車両によりも優先順位が低い車両、特に、当該車両から見て右側にあり且つ交差点での直進意思が検出される右側車両に対して、車車間通信を介して自己の優先順位の放棄・譲渡を行えばよい。
【実施例5】
【0093】
図7は、実施例5に係る優先度設定アルゴリズム(図2のS240)の主要部を示すフローチャートである。尚、この実施例4に係る優先度設定アルゴリズムは、上述又は後述の他の優先度設定アルゴリズムと背反するものでなく、任意の組み合わせで適用可能である。
【0094】
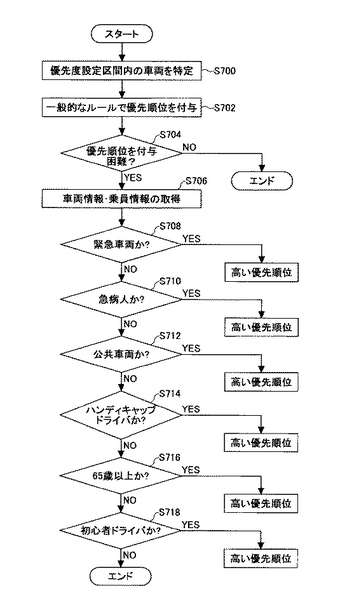
先ず、優先度設定部22は、各車両との路車間通信を介して取得した現在位置情報に基づいて、優先度設定区間内に存在する車両を特定する(S700)。ここで、優先度設定区間は、上述の実施例1と同様、交差点手前L1〜L2[m]の範囲内の区間としてよい。尚、ここでは、説明の複雑化を防止するため、各車両における高精度位置特定装置12のGPS測位精度は同等であるとするが、上述の実施例1のようにGPS測位精度の相違を考慮することは可能である。
【0095】
次いで、優先度設定部22は、一般的なルールを適用して、優先度設定区間内に存在する各車両に対して優先順位を付与する(S702)。一般的なルールとしては、例えば、先ず、各車両の車速情報に基づいて、所定速度以下の車両は非優先車両とされる。次に、交差点で交差する各道路の特性によって判断される。道路幅に差があれば幅が広い道路の方が優先となる。道路情報に交差道路のうちいずれが優先道路か特別の指定がある場合、それに従ってもよい。次に、道路特性による優先度が同一の場合(例えば、道路幅が略等しい場合)、各車両の位置情報(及び車速情報)に基づいて、交差点手前L1mの地点に早く到達する順に優先順位が付される。次に、それでも優先順位が決まらないときは、左方優先の原則を適用し、左側から来る車両が優先される。
【0096】
例えば4方向から略同時に交差点に車両が接近してきた場合など、かかる一般的なルールによる優先順位を付与が困難な場合(S704のYES)、優先度設定部22は、ステップ706以降の例外的なルールによる優先順位付与処理を開始する。
【0097】
具体的には、先ず、優先度設定部22は、優先順位の決定を行うべき各車両との路車間通信を介して、各車両の車両情報・乗員情報を取得する(S706)。車両情報・乗員情報は、各車両において、各種センサの出力信号やメモリ等に記憶された各種情報に基づいて生成される。各車両の車両情報・乗員情報は、各車両との路車間通信を介して毎回取得されてもよいし、一回取得した後は各車両のIDに対応付けてマップに記録され、以後、各車両のIDだけ取得してマップに基づいて判断されてもよい。
【0098】
次いで、優先度設定部22は、取得した各車両の車両情報・乗員情報に基づいて、緊急車両(例えば消防車や救急車)が存在するか否かを判断する(S708)。緊急車両が存在する場合、優先度設定部22は、当該緊急車両に対して高い優先度を付与する。
【0099】
次いで、優先度設定部22は、取得した各車両の車両情報・乗員情報に基づいて、病人や妊婦等の緊急の手当てを要する人を搬送している一般車両が存在するか否かを判断する(S710)。病人等を搬送している一般車両が存在する場合、優先度設定部22は、当該車両に対して高い優先度を付与する。
【0100】
次いで、優先度設定部22は、取得した各車両の車両情報・乗員情報に基づいて、バス等の公共車両が存在するか否かを判断する(S712)。公共車両が存在する場合、優先度設定部22は、当該車両に対して高い優先度を付与する。
【0101】
次いで、優先度設定部22は、取得した各車両の車両情報・乗員情報に基づいて、ハンディキャップドライバが運転する車両が存在するか否かを判断する(S714)。ハンディキャップドライバが運転する車両が存在する場合、優先度設定部22は、当該車両に対して高い優先度を付与する。
【0102】
次いで、優先度設定部22は、取得した各車両の車両情報・乗員情報に基づいて、高齢者が運転する車両が存在するか否かを判断する(S716)。高齢者が運転する車両が存在する場合、優先度設定部22は、当該車両に対して高い優先度を付与する。
【0103】
次いで、優先度設定部22は、取得した各車両の車両情報・乗員情報に基づいて、高齢者が運転する車両が存在するか否かを判断する(S718)。初心者が運転する車両が存在する場合、優先度設定部22は、当該車両に対して高い優先度を付与する。
【0104】
このように本実施例によれば、一般的なルールによる優先順位の決定が困難ないし不能な例外的な場合にも、適切に優先順位を決定することができる。尚、例えば緊急車両等については、一般的なルールに優先して最も高い優先順位が付与されてもよい。また、上述の実施例では、緊急車両、病人等を搬送している一般車両、公共車両、ハンディキャップドライバが運転する車両、高齢者が運転する車両、初心者が運転する車両の順に高い優先順位が付与されているが、かかる順番は必要に応じて適宜変更されてもよい。
【0105】
また、本実施例において、各車両の輸送効率、停止能力を考慮して、乗員数の多い車両に対して高い優先度を付与することとしてもよい。例えば、バス同士で競合した場合には、乗員数の多い方のバスに対して高い優先度を付与することとしてもよい。
【実施例6】
【0106】
図8は、実施例6に係る優先度設定アルゴリズム(図2のS240)の主要部を示すフローチャートである。尚、この実施例6に係る優先度設定アルゴリズムは、上述又は後述の他の優先度設定アルゴリズムと背反するものでなく、任意の組み合わせで適用可能である。
【0107】
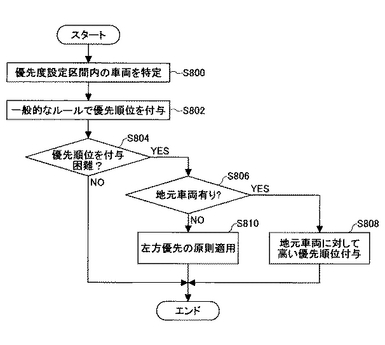
先ず、優先度設定部22は、各車両との路車間通信を介して取得した現在位置情報に基づいて、優先度設定区間内に存在する車両を特定する(S800)。ここで、優先度設定区間は、上述の実施例1と同様、交差点手前L1〜L2[m]の範囲内の区間としてよい。尚、ここでは、説明の複雑化を防止するため、各車両における高精度位置特定装置12のGPS測位精度は同等であるとするが、上述の実施例1のようにGPS測位精度の相違を考慮することは可能である。
【0108】
次いで、優先度設定部22は、一般的なルールを適用して、優先度設定区間内に存在する各車両に対して優先順位を付与する(S802)。一般的なルールとしては、例えば、先ず、各車両の車速情報に基づいて、所定速度以下の車両は非優先車両とされる。次に、交差点で交差する各道路の特性によって判断される。道路幅に差があれば幅が広い道路の方が優先となる。道路情報に交差道路のうちいずれが優先道路か特別の指定がある場合、それに従ってもよい。次に、道路特性による優先度が同一の場合(例えば、道路幅が略等しい場合)、各車両の位置情報(及び車速情報)に基づいて、交差点手前L1mの地点に早く到達する順に優先順位が付される。
【0109】
例えば2以上の方向から略同時に交差点に車両が接近してきた場合など、かかる一般的なルールによる優先順位を付与が困難な場合(S804のYES)、優先度設定部22は、ステップ806以降の例外的なルールによる優先順位付与処理を開始する。
【0110】
具体的には、先ず、優先度設定部22は、優先順位の決定を行うべき各車両との路車間通信を介して、各車両の車両属性情報を取得する(S806)。車両属性情報は、車両毎に異なりうるブレーキ性能・加速性能のような、車両の個々の属性に関する情報であり、本例では、車両属性情報は、車両の使用拠点に関する地理的情報である。具体的には、かかる地理的情報は、車両の車庫の住所、所有者の住所、主たる行動範囲(例えば、実際の移動軌跡に基づいて導出。)を示す住所(区域名、都道府県名)であってよい。車両属性情報は、各車両との路車間通信を介して毎回取得されてもよいし、一回取得した後は各車両のIDに対応付けてマップに記録され、以後、各車両のIDだけ取得してマップに基づいて判断されてもよい。
【0111】
次いで、優先度設定部22は、取得した各車両の車両属性情報に基づいて、地元車両(地元住民が運転する車両又は交差点付近の地域を本拠地としている車両)が存在するか否かを判断する(S808)。地元車両が存在する場合、優先度設定部22は、当該地元車両に対して高い優先度を付与する。地元車両が存在しない場合は、優先度設定部22は、左方優先の原則を適用し、左側から来る車両に対して高い優先度を付与する。
【0112】
このように本実施例によれば、交差点周辺の地理に詳しい運転者が運転している車両に高い優先順位を付与することで、交差点周辺の地理に疎い運転者が運転している車両において発生しやすい急な進路変更や減速によって、交差点の交通の円滑性が損なわれることが効果的に防止される。
【0113】
尚、本実施例において、同様の観点から、各車両の交差点の使用回数(通過回数)を交差点毎にカウントして、各車両のIDに対応付けて記録しておき、交差点の使用回数が所定回数以上の車両に対して高い優先順位を付与することも可能である。
【実施例7】
【0114】
図9は、実施例7に係る優先度設定アルゴリズム(図2のS240)の主要部を示すフローチャートである。尚、この実施例7に係る優先度設定アルゴリズムは、上述又は後述の他の優先度設定アルゴリズムと背反するものでなく、任意の組み合わせで適用可能である。
【0115】
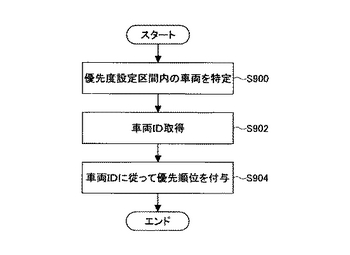
先ず、優先度設定部22は、各車両との路車間通信を介して取得した現在位置情報に基づいて、優先度設定区間内に存在する車両を特定する(S900)。ここで、優先度設定区間は、上述の実施例1と同様、交差点手前L1〜L2[m]の範囲内の区間としてよい。尚、ここでは、説明の複雑化を防止するため、各車両における高精度位置特定装置12のGPS測位精度は同等であるとするが、上述の実施例1のようにGPS測位精度の相違を考慮することは可能である。
【0116】
次いで、優先度設定部22は、優先度設定区間内に存在する各車両との路車間通信を介して、各車両のID(車両ID)を、各車両の車両属性情報として取得する(S902)。車両IDは、自動車登録番号(系列外特殊車両を含む)、陸運事務所所管コード、通信用無線局識別符号(例えば電話番号、コールサイン、IP番号等)のような適切なIDコードであればよい。
【0117】
優先度設定部22は、各車両IDと対応付けて予め定められた優先順位設定マップを参照して、各車両IDに対応する優先順位を、各車両に対して付与する(S904)。各車両IDと優先順位との対応関係は、原則的には、緊急性・公共性の高い車両に対して高い優先順位が設定されるように定義され、一般車両に対しては車両登録時の時系列順に高い優先順位が設定されるように定義されてよい。例えば、一般車両に対して、車両登録が新しいほど(又は古いほど)高い優先順位が設定されるように定義されてよい。また、公平さを平準化する目的で、各車両IDと優先順位との対応関係が定期的に変更されてもよい。或いは、優良ドライバの車両や交通規範遵守性の高い車両に対して定期的に優先順位が繰上げされてもよい。
【0118】
尚、複数の車両が協働して、車車間通信を介して自律的に交差点通過判断アルゴリズムを実現する構成では、各車両は、同一の対応関係が定義された共通の優先順位設定マップに付与することで、当該共通の優先順位設定マップに基づいた矛盾のない優先順位の自立的な決定が可能である。
【実施例8】
【0119】
図10は、実施例8に係る優先度設定アルゴリズム(図2のS240)の主要部を示すフローチャートである。尚、この実施例8に係る優先度設定アルゴリズムは、上述の他の優先度設定アルゴリズムと背反するものでなく、任意の組み合わせで適用可能である。
【0120】
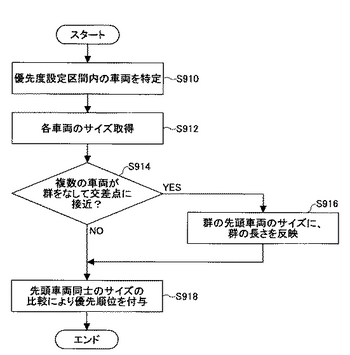
先ず、優先度設定部22は、各車両との路車間通信を介して取得した現在位置情報に基づいて、優先度設定区間内に存在する車両を特定する(S910)。ここで、優先度設定区間は、上述の実施例1と同様、交差点手前L1〜L2[m]の範囲内の区間としてよい。尚、ここでは、説明の複雑化を防止するため、各車両における高精度位置特定装置12のGPS測位精度は同等であるとするが、上述の実施例1のようにGPS測位精度の相違を考慮することは可能である。
【0121】
次いで、優先度設定部22は、優先度設定区間内に存在する各車両との路車間通信を介して、各車両のサイズ(例えばホイールベース長、重量)を、各車両の車両属性情報として取得する(S912)。
【0122】
次いで、優先度設定部22は、複数の車両が群(隊列)をなして交差点に接近しているか否かを判断する(S914)。優先度設定部22は、例えば、所定車間距離且つ所定速度差を満たしつつ同一方向に走行する複数車両が存在する場合、それら複数車両は群をなしていると判断してよい。
【0123】
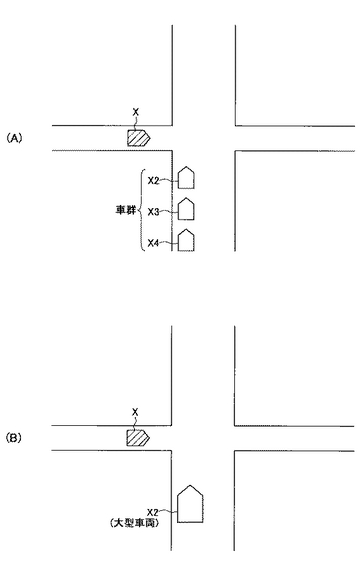
例えば、図11(A)に示す交差点状況のように、複数の車両が群(隊列)をなして交差点に接近している場合(S914のYES)、優先度設定部22は、当該群の全体長さ(例えば各車両の長さ(ホイールベース長)の合計や、当該合計長さに各車間距離を加えた長さ。)を、当該群の先頭車両のサイズに置き換える(S916)。
【0124】
次いで、優先度設定部22は、各方向から交差点に接近してくる先頭車両同士のサイズを比較し、サイズの大きい方に高い優先順位を付与する(S918)。従って、上述の如く車群の先頭車両には、単独で交差点に接近してくる先頭車両、又は、より短い長さの車群の先頭車両よりも高い優先順位が付与される。例えば図11(A)に示す例では、本来的には左方優先の原則により優先車両となるべき車両Xよりも、車群の先頭車両X2の方が高い優先順位が付与される。この場合、車群として交差点をまとめて通過させた方が効率的であることから、先頭車両X2の後続車両X2,3に対しても、車両Xよりも高い優先順位が付与されてよい。また、図11(B)に示す交差点状況のように、群をなさない単独の車両同士であれば、サイズの大きい方の車両X2(トラックやバス等の大型車両)に対して高い優先順位が付与される。これは、大きなサイズの車両に減速を強いる方が、エネルギ損失が大きいからである。
【0125】
尚、このようにして優先順位が付与されると、各車両には、その優先順位に応じて環境力アルゴリズムが適用されることになる(図2のS270参照)。
【0126】
このように本実施例によれば、各車両のサイズに基づいて、優先順位付与後の環境力アルゴリズムの適用により失われる全体のエネルギ量が可能な限り小さくなるように、優先順位が決定されるので、エネルギ効率的な観点からも円滑で効率的な交差点の交通制御を実現することができる。
【実施例9】
【0127】
実施例9以降は、上述の優先度設定アルゴリズムを実現できない車両、即ち、例えば図1に示すような車両側構成の一部を備えていない(例えば通信装置14を搭載しない車両)を考慮した各種実施例に関する。以下、上述の優先度設定アルゴリズムを実現できない車両を、「非搭載車両」と称する。尚、以下の各種実施例は、非搭載車両が無くなるまでの過渡期において有用であると共に、非搭載車両が無くなった後においても、ある車両において例えば通信装置14の故障等が生じた場合には実質的に“非搭載車両”が存在することになるので依然として有用である。
【0128】
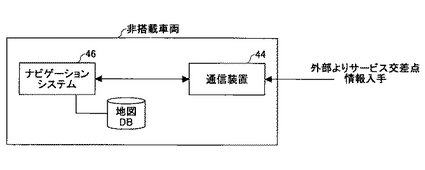
図12は、非搭載車両における車両側構成の一例を示すブロック図である。非搭載車両は、通信装置44、及び、ナビゲーションシステム46を備える。通信装置44は、上述の通信装置14とは異なり、高い通信機能(即ち、優先順位の設定のための各種通信機能。)を実現するものでなくてよい。
【0129】
ナビゲーションシステム46は、交差点情報を含む地図データベースを含む。交差点情報は、各交差点の位置情報、各交差点の属性情報(交差点属性情報)を含む。交差点属性情報は、当該交差点が上述の優先度設定アルゴリズムによる交通制御が実現される交差点であるか否かの情報を含む。尚、以下、上述の優先度設定アルゴリズムによる交通制御が実現される交差点を、「サービス交差点」という。
【0130】
ナビゲーションシステム46は、ユーザによる設定された目的地までのルート探索機能を備える。但し、本実施例のナビゲーションシステム46は、ルート探索時、サービス交差点を極力通過しないようなルート探索を行う機能(以下、「サービス交差点回避ルート探索機能」という)を有する。これにより、上述の優先度設定アルゴリズムを適用できない非搭載車両が混在することに起因して、上述の各実施例による円滑な交差点の交通制御が妨げられるような事態を防止することができる。尚、サービス交差点がインフラ整備により増加するのに対応して、ナビゲーションシステム46の交差点情報は、随時新しい情報に更新される。これは、最新の交差点情報を保持する管制側構成(又はセンタ施設)から最新の交差点情報をダウンロードすることで実現されてよい。
【実施例10】
【0131】
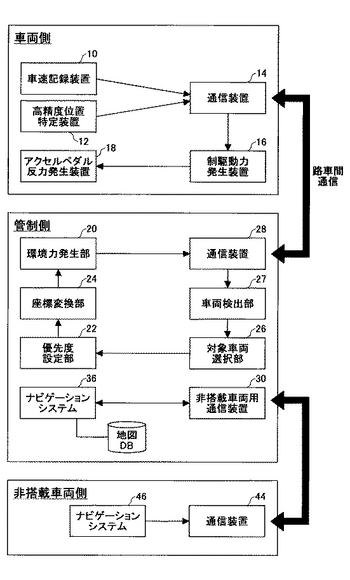
図13は、非搭載車両が組み込まれた車両制御システムの一実施例を示すシステム構成図である。非搭載車両は、通信装置44、及び、ナビゲーションシステム46を備える。通信装置44は、上述の通信装置14とは異なり、高い通信機能(即ち、優先順位の設定のための各種通信機能。)を実現するものでなくてよい。また、ナビゲーションシステム46は、上述の実施例9で説明したサービス交差点回避ルート探索機能を有さなくてもよい。
【0132】
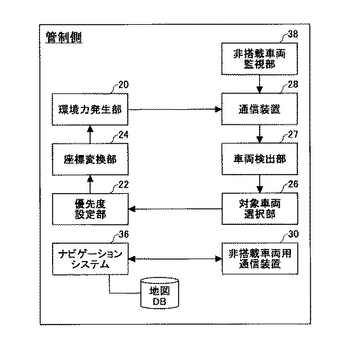
図13に示すように、車両側構成は、図1に示す構成に加えて、対非搭載車両用の構成として、非搭載車両の通信装置44との間で路車間通信を実現するための対非搭載車両用の通信装置30と、対非搭載車両用のナビゲーション部36とを備える。
【0133】
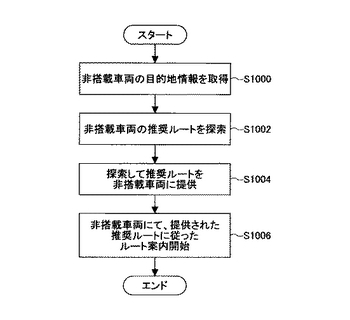
図14は、実施例10に係る優先度設定アルゴリズムの主要部を示すフローチャートである。
【0134】
先ず、ステップ1000では、対非搭載車両用のナビゲーション部36は、非搭載車両の通信装置44による非搭載車両との間で路車間通信を介して、非搭載車両の目的地情報を取得する。
【0135】
対非搭載車両用のナビゲーション部36は、取得した非搭載車両の目的地情報に基づいて、非搭載車両の現在位置から目的地までの推奨ルートを探索する(S1002)。このとき、ナビゲーション部36は、非搭載車両がサービス交差点を極力通過しないようなルート探索を行う。尚、ナビゲーション部36は、サービス交差点の位置情報を保有するデータベースを備える。サービス交差点がインフラ整備により増加するのに対応して、データベースが随時更新される。また、ナビゲーション部36は、各サービス交差点における交通量を考慮して、推奨ルートを探索してもよい。例えば、交通量の非常に少ないサービス交差点に対しては、非搭載車両の通過が許容され、交通量の非常に多いサービス交差点に対しては、非搭載車両の通過が絶対的に禁止されるような推奨ルートを探索してもよい。
【0136】
対非搭載車両用のナビゲーション部36は、探索して得た推奨ルートを、非搭載車両との間で路車間通信を介して、非搭載車両に提供する(S1004)。
【0137】
非搭載車両におけるナビゲーションシステム46は、かかる推奨ルートを通信装置44を介して受信すると、当該推奨ルートをディスプレイに表示し、音声案内等により当該推奨ルートに従ったルート案内を行う(S1006)。このとき、ナビゲーションシステム46は、自身で既に探索した推奨ルートに従ってルート案内を行っている場合でも、対非搭載車両用のナビゲーション部36からの推奨ルートに従ってルート案内を行う。
【0138】
このように本実施例10によれば、上述の実施例9と同様、上述の優先度設定アルゴリズムを適用できない非搭載車両が混在することに起因して、上述の各実施例1ないし8による円滑な交差点の交通制御が妨げられるような事態を防止することができる。
【0139】
尚、本実施例において、対非搭載車両用のナビゲーション部36は、非搭載車両の目的地までの完全な推奨ルートを提供するのではなく、一時的な回避ルート(サービス交差点を回避できるようなルート。)を提供することとしてもよい。例えば、サービス交差点を回避できるような迂回路が存在する場合には、当該迂回路を回避ルートとして提供することとしてもよい。
【0140】
尚、本実施例において、サービス交差点に電子案内板のようなインフラ設備が存在する場合、当該電子案内板を用いて、非搭載車両の運転者が目視できるような態様で、回避ルートを出力してもよい。
【実施例11】
【0141】
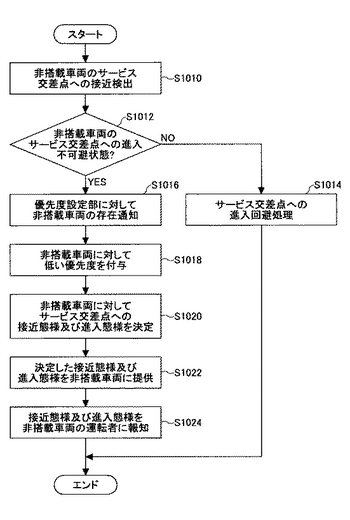
図15は、実施例11に係る優先度設定アルゴリズムの主要部を示すフローチャートである。
【0142】
先ず、ステップ1010では、対非搭載車両用のナビゲーション部36は、非搭載車両の通信装置44による非搭載車両との間で路車間通信を介して、サービス交差点に接近する非搭載車両を検出する。尚、非搭載車両の存在は、当該存在を検出できる他の車両(例えば非搭載車両の後続車両。)からの情報提供を受けて検出されてもよいし、サービス交差点に設置されたカメラなどのインフラ設備により検出されてもよい。また、非搭載車両の存在は、それを検出した隣接するサービス交差点の管制側構成からの情報提供によって検出されてもよい。
【0143】
非搭載車両を検出すると、対非搭載車両用のナビゲーション部36は、当該非搭載車両のサービス交差点への進入不可避状態であるか否かを判断する(S1012)。例えば、上述の如く迂回路を案内するなどが可能な場合、進入不可避状態で無いと判断され、迂回路を案内するなどして、非搭載車によるサービス交差点への進入を防止する(S1014)。
【0144】
非搭載車両のサービス交差点への進入不可避状態であると判断した場合、非搭載車両用のナビゲーション部36は、優先度設定部22に対して、進入不可避状態にある非搭載車両の存在を通知する(S1016)。
【0145】
この通知を受けた優先度設定部22は、非搭載車両に対して(必要に応じて、それに後続する車両に対しても)、低い優先度を付与し(S1018)、他の優先度の高い車両との関係で適切なサービス交差点への接近態様及び進入態様を決定して、ナビゲーション部36に通知する(S1020)。
【0146】
この通知を受けたナビゲーション部36は、優先度設定部22にて決定された接近態様及び進入態様を、非搭載車両に提供する(S1022)。
【0147】
非搭載車両におけるナビゲーションシステム46は、かかる接近態様及び進入態様を通信装置44を介して受信すると、当該接近態様及び進入態様を、音声案内等により当該非搭載車両の運転者に報知する(S1024)。
【0148】
このように本実施例11によれば、上述の実施例9、10と同様、上述の優先度設定アルゴリズムを適用できない非搭載車両が混在することに起因して、上述の各実施例1ないし8による円滑な交差点の交通制御が妨げられるような事態を防止することができる。また、非搭載車両のサービス交差点への進入が避けられない場合には、当該非搭載車両に低い優先順位を付与することで、当該非搭載車両が、他の搭載車両に可能な限り迷惑を掛けない態様で、サービス交差点を通過できるようにすることができる。
【0149】
尚、本実施例において、サービス交差点に電子案内板や信号機に相当するインフラ設備(本来的には不要であるが、臨時的に用いる信号機。)が存在する場合、当該インフラ設備を用いて、非搭載車両の運転者が目視できるような態様で、非搭載車両に対して、優先度設定部22にて決定された接近態様及び進入態様を通知してもよい。例えば、通常の信号機と同様、非搭載車両が進入可能な状態となるまで、信号機を赤色に点灯して停止を指示してよい。尚、かかる信号機は、太陽電池を電力源とし、消費電力等で有利なLED(light−emitting diode)により構成された路面埋め込み型のランプであってよい。
【実施例12】
【0150】
図16は、実施例12に係る車両制御システムにおける管制側構成の一実施例を示すブロック図である。
【0151】
図16に示すように、実施例12に係る車両側構成は、図12に示す構成に加えて、対非搭載車両用の構成として、非搭載車両監視部38とを備える。
【0152】
図17は、非搭載車両監視部38において実現される非搭載車両監視アルゴリズムの主要部を示すフローチャートである。
【0153】
サービス交差点に対して進入不可避状態である非搭載車両が検出されると(S1030)、非搭載車両監視部38は、当該非搭載車両に対して、当該サービス交差点を回避するためのルート案内ないし迂回路案内がなされていたか否かを判断する(S1032)。サービス交差点を回避するためのルート案内ないし迂回路案内がなされていなかった場合、そのまま終了する。
【0154】
サービス交差点を回避するためのルート案内ないし迂回路案内がなされていたにも拘らず、それに従わずに接近してきた非搭載車両に対しては、非搭載車両監視部38は、当該非搭載車両を特定するための情報を記録する(S1034)。この情報は、車両の番号(ナンバープレートの番号)等を含み、サービス交差点にカメラが設置されている場合は、当該カメラからの画像に基づいて生成されてよい。
【0155】
次いで、非搭載車両監視部38は、非搭載車両の交差点通過後の進路を監視し(S1036)、必要に応じて、隣接するサービス交差点の管制側構成に対して、非搭載車両がそちらのサービス交差点に向かう旨通知する(S1038)。非搭載車両監視部38は、他のサービス交差点における非搭載車両監視部38と協働して、サービス交差点を回避するためのルート案内ないし迂回路案内がなされていたにも拘らず、それに従わずに接近・通過した非搭載車両に対して、その違反回数や頻度を算出・記録してもよい。
【0156】
以上、本発明の好ましい実施例について詳説したが、本発明は、上述した実施例に制限されることはなく、本発明の範囲を逸脱することなく、上述した実施例に種々の変形及び置換を加えることができる。
【0157】
特に上述した各実施例に係る優先度設定アルゴリズム(優先順位付与ルール)は任意に組み合わせることができる。この場合、優先順位を決定する因子が数多くある場合は、各因子毎にポイント加算方式で各車両にポイントを付与し、ポイントの大きい車両から順に高い優先順位を付してもよい。
【図面の簡単な説明】
【0158】
【図1】本発明による車両制御システムの基本実施態様を示すシステム構成図である。
【図2】基本実施態様に係る交差点通過判断アルゴリズムの流れを示すフローチャートである。
【図3】実施例1に係る優先度設定アルゴリズムの主要部を示すフローチャートである。
【図4】実施例2に係る優先度設定アルゴリズムの主要部を示すフローチャートである。
【図5】実施例3に係る優先度設定アルゴリズムの主要部を示すフローチャートである。
【図6】実施例4に係る優先度設定アルゴリズムの主要部を示すフローチャートである。
【図7】実施例5に係る優先度設定アルゴリズムの主要部を示すフローチャートである。
【図8】実施例6に係る優先度設定アルゴリズムの主要部を示すフローチャートである。
【図9】実施例7に係る優先度設定アルゴリズムの主要部を示すフローチャートである。
【図10】実施例8に係る優先度設定アルゴリズムの主要部を示すフローチャートである。
【図11】実施例8に係る優先度設定アルゴリズムの説明図である。
【図12】非搭載車両における車両側構成の一例を示すブロック図である。
【図13】非搭載車両が組み込まれた車両制御システムの一実施例を示すシステム構成図である。
【図14】実施例10に係る優先度設定アルゴリズムの主要部を示すフローチャートである。
【図15】実施例11に係る優先度設定アルゴリズムの主要部を示すフローチャートである。
【図16】実施例12に係る車両制御システムにおける管制側構成の一実施例を示すブロック図である。
【図17】実施例12に係る非搭載車両監視アルゴリズムの主要部を示すフローチャートである。
【符号の説明】
【0159】
10 車速記録装置
12 高精度位置特定装置
14 通信装置
16 制駆動力発生装置
18 アクセルペダル反力発生装置
20 環境力発生部
22 優先度設定部
24 座標変換部
26 対象車両選択部
28 通信装置
【技術分野】
【0001】
本発明は、交差点における円滑な交通を確保するための車両制御システムに関する。
【背景技術】
【0002】
従来から、路に設置したセンサから送信されるセンサ情報及び前記センサから送信されたセンサ情報を含む通信情報の少なくとも一方を用いて、衝突発生の有無を確率的手法によって予測し、この予測の結果、衝突が発生すると判定した場合には、運転者に向けて衝突発生にかかわる情報を提供し、又は車両が有する情報処理装置に向けて衝突を回避するための情報を送信することを特徴とする交差点衝突防止支援方法が知られている(例えば、特許文献1参照)。この交差点衝突防止支援方法においては、運転者のとる挙動のばらつきが影響して、確定的に予測することが困難な物理量を、当該物理量の過去のデータから計算した統計的な性質を利用して予測する手法を利用して、異なる方向から交差点に接近する車両間に衝突が発生することの予測を行う。
【0003】
また、スムーズな制動制御を行うための手法として、交差点通過ではなく追従走行の場合であるが、先行車などの環境から自車両に及ぼされる環境力という概念を導入し、環境力に応じた減速が実現されるように制動力制御を行って先行車に衝突しないための制動をスムーズに行う手法も知られている(例えば、特許文献2参照)。
【特許文献1】特開2002−140799公報
【特許文献2】特開平8−11579号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、上述の特許文献1による従来技術では、交差点における車両間の衝突を回避する観点から車両制御を行うものであり、交錯可能性の高い車両に対して、交差点における円滑で効率的な交通を実現する観点から優先度を設定するものでないため、交差点における円滑で効率的な交通制御を実現することが困難である。
【0005】
そこで、本発明は、交差点における円滑で効率的な交通を実現することができる車両制御システムの提供を目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するため、第1の発明は、交差点に進入すべく交差点に接近する車両を検出する車両検出手段と、
交差点への各車両の接近態様を少なくとも1つのパラメータとして、該各車両に対して交差点進入に関する優先度を設定する優先度設定手段と、を備えることを特徴とする。
【0007】
第2の発明は、第1の発明に係る車両制御システムにおいて、設定した優先度に基づいて、優先度が相対的に高い車両が交差点に優先的に進入できるように、交差点への各車両の接近態様を制御する車両制御手段を備えることを特徴とする。
【0008】
第3の発明は、第1の発明に係る車両制御システムにおいて、優先度設定手段は、各車両に搭載されたGPS信号に基づく車両位置測位装置の測位精度をパラメータとして、各車両に対して優先度を設定することを特徴とする。
【0009】
第4の発明は、第1の発明に係る車両制御システムにおいて、優先度設定手段は、ナビゲーションシステムの案内ルートに従って走行していない車両に対しては、低い優先度を設定することを特徴とする。
【0010】
第5の発明は、第1の発明に係る車両制御システムにおいて、優先度設定手段は、優先度の高い車両において運転者による制動操作が検出された場合、該車両に対して低い優先度を設定しなおすことを特徴とする。
【0011】
第6の発明は、第1の発明に係る車両制御システムにおいて、各自の車両から見て左側にある左側車両において交差点での右左折意思が検出された場合、優先度設定手段は、該左側車両に対して、該左側車両から見て右側にあり且つ交差点での直進意思が検出される右側車両よりも、低い優先度を設定することを特徴とする。
【0012】
第7の発明は、第1の発明に係る車両制御システムにおいて、優先度設定手段は、各車両の乗員に関する乗員情報をパラメータとして、各車両に対して優先度を設定することを特徴とする。
【0013】
第8の発明は、第7の発明に係る車両制御システムにおいて、
前記乗員情報は、乗員数を表すことが可能な情報を含み、
優先度設定手段は、乗員数の多い車両に対して高い優先度を設定することを特徴とする。
【0014】
第9の発明は、第7の発明に係る車両制御システムにおいて、前記乗員情報は、高齢者、初心者、急病人のような乗員の個々の属性を表すことが可能な乗員属性情報を含むことを特徴とする。
【0015】
第10の発明は、第1の発明に係る車両制御システムにおいて、優先度設定手段は、車両の個々の属性に関する車両属性情報をパラメータとして、各車両に対して優先度を設定することを特徴とする。
【0016】
第11の発明は、第10の発明に係る車両制御システムにおいて、前記車両属性情報は、車両の使用拠点に関する地理的情報を含み、
優先度設定手段は、使用拠点が交差点位置に近い車両に対して高い優先度を設定することを特徴とする。
【0017】
第12の発明は、第10の発明に係る車両制御システムにおいて、前記車両属性情報は、個々の車両毎に異なる車両IDであり、
優先度設定手段は、各車両IDと優先度との所定の対応関係に従って、各車両に対して、それぞれの車両IDに応じた優先度を設定することを特徴とする。
【0018】
第13の発明は、第10の発明に係る車両制御システムにおいて、前記車両属性情報は、車両の公共性を表すことが可能な情報を含み、
優先度設定手段は、公共性の高い車両に対して高い優先度を設定することを特徴とする。
【0019】
第14の発明は、第1の発明に係る車両制御システムにおいて、前記車両属性情報は、車両のサイズを表すことが可能な情報を含み、
優先度設定手段は、サイズの大きい車両に対して高い優先度を設定することを特徴とする。
【0020】
第15の発明は、第1〜13の何れかの発明に係る車両制御システムにおいて、前記車両検出手段、前記優先度設定手段及び前記制御手段の少なくとも一部の動作が、各車両に搭載される通信機能付き専用車載機器により協働して実現されることを特徴とする。
【0021】
第16の発明は、第15の発明に係る車両制御システムにおいて、当該車両制御システムによる上記車両制御が適用されるサービス交差点に対する、前記専用車載機器を搭載していない非搭載車両の通行が抑制ないし禁止されるように、非搭載車両の通行ルートを案内するナビゲーション手段を備えることを特徴とする。
【0022】
第17の発明は、第16の発明に係る車両制御システムにおいて、前記ナビゲーション手段は、前記サービス交差点に関する最新の交差点情報を収録した地図データベースを備えることを特徴とする。
【0023】
第18の発明は、第15の発明に係る車両制御システムにおいて、優先度設定手段は、前記専用車載機器を搭載していない非搭載車両に対して、前記専用車載機器を搭載している車両よりも低い優先度を設定することを特徴とする。
【0024】
第19の発明は、第18の発明に係る車両制御システムにおいて、前記非搭載車両に対して交差点への進入の可否情報を、前記非搭載車両の運転者が目視できるような態様で提供する情報提供手段が、交差点に設置されることを特徴とする。
【0025】
第20の発明は、第16の発明に係る車両制御システムにおいて、前記ナビゲーション手段による通行ルートの案内に従わずに前記サービス交差点を通行した非搭載車両を特定する監視手段が、交差点に設置されることを特徴とする。
【発明の効果】
【0026】
本発明によれば、交差点における円滑で効率的な交通を実現することができる車両制御システムを得ることができる。
【発明を実施するための最良の形態】
【0027】
以下、図面を参照して、本発明を実施するための最良の形態の説明を行う。
【0028】
図1は、本発明による車両制御システムの一実施態様を示すシステム構成図である。図1には、車両側構成と、管制側構成とが示されている。図1に示す車両側構成は、1台の車両に係る構成であるが、本システムに関連する各車両には、同様の構成が搭載される。同様に、図1に示す管制側構成は、1つの交差点に係る構成であるが、本システムに関連する各交差点には、同様の構成が設定される。
【0029】
図1に示すように、車両側構成は、車両に搭載され、車速記録装置10、高精度位置特定装置12、通信装置14、制駆動力発生装置16、及び、アクセルペダル反力発生装置18を備える。
【0030】
車速記録装置10は、例えば車輪速センサのセンサ出力に基づいて車両の速度履歴を記録する。
【0031】
高精度位置特定装置12は、例えばRTK−GPS(リアルタイム・キネマチック全地球測位システム)や搬送波位相式測位法などによる高精度測位機能を備える。高精度位置特定装置12は、GPS測位による測位結果に基づいて、自車両の方位や現在位置を特定する。
【0032】
通信装置14は、他車両及び/又は管制側と通信し、いわゆる車車間通信及び/又は路車間通信を実現する。アンテナの性能や形状並びに通信に利用する方式や周波数帯域などについては特段の制限はなく任意でよい。車車間通信及び路車間通信について様々な手法や装置構成が既に提案されており、通信装置14の更なる具体例は当業者には明らかである。
【0033】
制駆動力発生装置16は、車輪毎に配されるブレーキ(機械ブレーキ)や、モータージェネレータによる回生ブレーキを含む制動力発生装置を含む。機械ブレーキの場合、各ブレーキは、それぞれに対して設けられるアクチュエータにより、運転者によるブレーキペダルの操作量に応じて電気的に制御され、また、必要に応じて、自動的に各車輪毎に個別に制御される。制駆動力発生装置16は、また、エンジンや電動モータのような駆動力発生装置を含む。尚、電動モータは、2次電池や燃料電池を電源として動作するものであってよい。
【0034】
本実施態様では、制駆動力発生装置16は、後述するように、管制側から通信装置14を介して受信する制御信号に応じて、制動力及び/又は駆動力を発生させる。尚、かかる介入による加減速制御中においても、運転者による自主的なブレーキ操作が行われた場合には、ブレーキ操作による制動が優先的に実現される。これは、介入による加減速制御中においても、特に安全面を重視して、運転者による制動意思を最も優先させるべきであるからである。
【0035】
アクセルペダル反力発生装置18は、運転者が足で操作するアクセルペダルに設定されたアクチュエータにより、アクセルペダルの反力を制御して、制駆動力発生装置16による介入制動状態に応じた大きさのアクセルペダル反力を発生させる。アクセルペダル反力の制御については様々な手法や装置構成が既に提案されており、具体例は当業者には明らかである。
【0036】
管制側構成は、インフラとして設置される基地局又は中継局であり、交差点(特に信号機のない交差点。)毎に配置されてもよいし、複数の交差点を統括するように配置されてもよい。
【0037】
管制側構成は、図1に示すように、環境力発生部20、優先度設定部22、座標変換部24、対象車両選択部26、車両検出部27、及び、通信装置28を備える。車両側と管制側とは、それぞれの通信装置14及び通信装置28を介して双方向通信(路車間通信)可能に構成される。
【0038】
次に図2を参照して、本発明による車両制御システムにおいて実現される主要処理の流れを説明する。図2に示す交差点通過判断アルゴリズムは、交差点における円滑で効率的な交通を実現する観点から構築されたものであり、交差点に進入してくる複数の車両を時間的にずらして該交差点を通過させるものである。
【0039】
以下の図2を参照した説明では、基本的に、車両側と管制側とが協働して、交差点通過判断アルゴリズムを実現している。しかしながら、車両側に各種機能部20〜26を設定し、複数の車両が協働して、車車間通信を介して自律的に交差点通過判断アルゴリズムを実現してもよいし、また、車両側に各種機能部20〜26の一部を設定することも可能である。尚、車両側に各種機能部20〜26の全てを設定する場合には、管制側、即ちインフラ自体が不要となる。
【0040】
図2を参照するに、管制側は、通信装置28による各車両との路車間通信により、車両検出部27により交差点に接近してくる車両を検出する(S210)。例えば、管制側は、交差点中心から所定エリア又は所定時間半径内の車両を検出する。尚、複数の車両が協働して、車車間通信を介して自律的に交差点通過判断アルゴリズムを実現する構成では、各車両は、それぞれの車両位置情報と道路情報とに基づいて自車両の交差点への接近を検出する。
【0041】
管制側は、通信装置28による各車両との路車間通信により、検出した各車両の位置及び速度を取得する(S220)。尚、複数の車両が協働して、車車間通信を介して自律的に交差点通過判断アルゴリズムを実現する構成では、各車両は、車車間通信を介して、他車両の位置及び速度を取得する。
【0042】
次いで、管制側の対象車両選択部26は、交差点に接近してくる各車両のうち、交錯の可能性のある車両を選択する(S230)。ここで、用語“交錯”とは、“衝突”とは異なる。即ち、本実施態様では、以下詳説する如く、交差点手前で設定される適切な優先順位に従って各車両の交差点への接近態様が事前に制御されるので、交差点において衝突が起こる可能性は理論的にはゼロであり、従って、交錯の可能性のある車両とは、「交差点に対してそれぞれ異なる方向から接近して進入する車両」程度の意味しか持たない。交錯の可能性のある車両の選択の具体例を挙げると、例えば、ある着目車両に対して同じ車線を同じ方向に走行中の車両、着目車両が交差点を直進する場合の対向車両、着目車両の走行道路と立体交差した道路を走行中の車両、道路以外の場所を走行中の(例えば道路沿いの駐車場内を徐行中の)車両、及び、交差点から遠ざかって行っている車両などは対象外となり、着目車両と同様、交差点に向かって進行中の車両であって、着目車両との速度ベクトルの内積が0又は0に近い車両が選択対象となる。尚、複数の車両が協働して、車車間通信を介して自律的に交差点通過判断アルゴリズムを実現する構成では、自車両を着目車両として、該自車両と交錯の可能性のある他車両が選択されることになる。
【0043】
次いで、管制側の優先度設定部22は、所定の優先度設定アルゴリズムに従って、交錯可能性のある各車両に対して優先順位ないし優先度(以下、単に「優先順位」という。)を決定する(S240)。優先度設定アルゴリズムは、基本的には、交差点における円滑で効率的な交通を実現する観点から構築される。優先順位は、2段階(即ち、優先権の有り、無し)で決定されてもよいし、3段階以上で決定されてもよい。以下では、優先順位を高い低いと表現するが、優先順位が2段階で表される構成の場合、高い優先順位とは優先権がある場合であり、低い優先順位とは優先権がない場合である。優先順位が3段階で表される構成の場合、高い優先順位とは、相対的に高いという程度、或いは、それよりも低い優先順位があるという程度の意味であり、特に明示しない限り、優先順位が最上位であることを必ずしも意味しない。また、以下で用いられる用語 “非優先車両”とは、優先権がない車両(優先順位が2段階で表される構成の場合。)、或いは、優先順位が最上位でない車両を意味し、“最優先車両” とは、優先権がある車両(優先順位が2段階で表される構成の場合。)、或いは、優先順位が最上位である車両を意味する。
【0044】
本ステップ240における優先順位を決定する処理は、交差点に進入しているすべての車両において個々に行われる。尚、複数の車両が協働して、車車間通信を介して自律的に交差点通過判断アルゴリズムを実現する構成では、同じ交差点に向けて進行している交錯可能性を有する複数の車両は、通信により互いの位置情報(及び車速情報)を相互に把握していると共に、すべての車両が同じ優先度設定アルゴリズムに基づいて優先順位を決定するため、いずれの車両においても同じ結論が得られ、矛盾は生じない。
【0045】
優先順位決定処理は、全車両に共通であって矛盾が生じない限り、任意の優先度設定アルゴリズムに基づくものであってよい。優先順位決定処理は、各車両に関して、その車両が交差点を通過するまで繰り返し実行される。なぜなら、例えばある車両が前方障害物等により急減速又は急停止等した場合や道路沿いの駐車場等に入った場合に優先順位が変動し得るからである。また、最優先車両が交差点を通過し終えると、他の車両の優先順位が繰り上げられ、新たな最優先車両が決定される。
【0046】
このようにして交錯可能性を有する複数の車両について優先順位が決定されると、最優先車両以外は非優先車両として最優先車両が交差点を通過するまで交差点を通過しないように時間差を生じさせるための処理に移行する。尚、優先順位が決定されると、各車両において、運転者に当該優先順位が報知されてもよい。
【0047】
即ち、優先順位付け(S240)後、座標変換部24は、非優先とされた車両を対象に座標変換処理を行う(S250)。尚、最優先とされた車両は、管制側による減速のための制御介入が何ら実行されず、運転者の操作するままの車速が許容される。この座標変換処理では、各対象車両の位置及び速度が、交差点形状に応じた直交座標系に変換される(即ち、各対象車両が、それぞれの速度ベクトルを持った座標点に変換される。)。
【0048】
次いで、管制側の環境力発生部20は、非優先とされた車両を対象に環境力アルゴリズムを適用する。具体的には、環境力発生部20は、最優先車両に係る直交座標変換された位置及び速度を、最優先車両によりも優先順位が低い車両の走行道路上(即ち、最優先車両と交錯可能性のある車両が存在する道路上)に写像し、該写像した最優先車両を先行車両として見立て、後続の車両に関する追従環境力を算出する(S260)。追従環境力は、特開平8−115779号公報(特許文献2)に記載されるように、後続車両が先行車両に衝突しないように場から受ける環境力である。したがって、この仮想先行車両から追従環境力を受けるものとして仮想先行車両の後続車両(非優先車両)を減速させることにより、最優先車両が最優先車両より優先順位が高い車両と交差点において交錯しないようにすることができる。
【0049】
ここで、上記特許文献2によれば、追従環境力Cは、
【0050】
【数1】
と表される(特許文献2の段落[0055]の記載参照)。ここで、aは運転者固有の最大加速度であり、x及びx’は非優先車両の位置及び速度であり、x−1及びx’−1は先行車両の位置及び速度であり、Tは運転者固有の車間時間であり、Lは運転者固有の停止時車間距離であり、pは環境条件の有効な範囲の大きさを決めるパラメータである。
【0051】
ここで、写像された仮想先行車両の位置及び速度をy−1及びy’−1とすると、上記式(1)は、仮想先行車両に対して、
【0052】
【数2】
と書き換えることができる。ここで、Tcrossは運転者固有の交錯車間時間であり、Lcrossは運転者固有の交錯停止時車間距離である。
【0053】
y−1及びy’−1は、直交座標変換により、
【0054】
【数3】
【0055】
【数4】
である。ここで、y及びy’は仮想先行車両の位置及び速度であり、(Xsig,Ysig)は交差点位置である。ここで、式(4)の右辺には2階微分が入っているため、これを解くと解が2つ現れ、一方の解が発散してしまう。そこで、本実施態様では、便宜上、2階微分の項を丸めて、式(4)を
【0056】
【数5】
と変形して用いるものとする。これによる実質的な問題は生じない。
【0057】
このようにして、最優先車両を仮想先行車両とした場合に追従環境力を受ける各車両に対して、それぞれの追従環境力が算出されると、管制側は、この算出された環境力に応じて、各車両の制駆動力発生装置16に対して、それぞれ発生させるべき制動力を指示する(S270)。これに応じて各車両の制駆動力発生装置16が作動し、算出された環境力に応じた減速度及び/又は車速が実現され、各車両において、必要に応じた減速、徐行ないし一時停止線での停止が実現される。尚、各車両の追従環境力は、上述の算出方法の他、それぞれの車両の1つ上の優先順位を持つ車両を仮想先行車両として算出されてもよいし、該車両よりも上位順位の全ての車両をそれぞれ仮想先行車両として算出した各追従環境力を、積算することで算出されてもよい。
【0058】
このステップ270では、アクセルペダル反力発生装置18は、車両側において速度制御中である旨を車両乗員(特に運転者)に伝達すべく、制駆動力発生装置16が発生する制動力に応じて、アクセルペダル反力を制御する。これにより、運転者(及び他の乗員)は、自動的にブレーキが掛かったことについて視覚的、聴覚的、及び/又は触覚的に伝達を受けるため、事態を把握できる。
【0059】
各車両を時間差をもって交差点を円滑に通過させるために、下位の方の優先順位の車両が一時停止することも許容される。しかしながら、交通の円滑化の観点からは、できる限り一時停止する車両が生じないように非優先車両の車速が制御されることが好ましい。
【0060】
もし一時停止した場合には、その車両については、横断発進判断支援アルゴリズムにより、一時停止状態から発進する際の発進支援が実行される(S280)。横断発進判断支援アルゴリズムについては様々な手法が既に提案されており、具体例は当業者には明らかである。例えば、簡易的には、管制側は、路車間通信により、待機中の各車両の進入方向(直進・右左折)を把握し、待機中の車両の優先順位が最上位になったときに、該車両のアクセルペダル反力制御が解除されるようアクセルペダル反力発生装置18に対して指示を出して、運転者に発進許可状態を把握させてもよい。
【0061】
このように、本実施態様によれば、交錯可能性を有する2台以上の車両がそれぞれの車両の減速度を最小限に留めながら交差点を時間差をもって接触・衝突することなく通行することができるため、信号機のない交差点において同一の2次元平面上に存在しながらあたかも交差する道路が立体交差しているかのような円滑な交通が実現される。
【0062】
次に、上述の基本実施態様を前提として、優先度設定部22による特徴的な優先度設定態様について、幾つかの実施例に分けて説明していく。
【実施例1】
【0063】
図3は、実施例1に係る優先度設定アルゴリズム(図2のS240)の主要部を示すフローチャートである。尚、この実施例1に係る優先度設定アルゴリズムは、上述又は後述の他の優先度設定アルゴリズムと背反するものでなく、任意の組み合わせで適用可能である。
【0064】
先ず、優先度設定部22は、各車両との路車間通信を介して取得した現在位置情報(各車両における高精度位置特定装置12の測位結果。)に基づいて、交差点までの距離がL1〜L2[m]である車両を特定する(S300)。ここで、所定距離L1は、優先度の設定が行われるべきポイントであり、交差点の素性・特徴(道路幅や隣接する交差点との距離、法定速度等)に応じて予め決定される。所定距離L2は、所定距離L1に、GPS測位誤差を考慮した余裕距離ΔLを足し合わせたものである(即ち、L2=L1+ΔL)。但し、交差点よりも所定距離L2手前の地点は、環境力アルゴリズムが適用されるエリアの開始地点であることが好ましい。
【0065】
優先度設定部22は、特定した各車両に対して、それらの車両に搭載される高精度位置特定装置12のGPS測位精度を判断する(S302)。GPS測位精度は、各車両における高精度位置特定装置12の測位精度であり、それぞれの高精度位置特定装置12において用いられている測位方法に応じて決定される。例えば、2重位相差を取る搬送波位相式測位法による高精度位置特定装置12は、1重位相差しか取らない搬送波位相式測位法による高精度位置特定装置12よりも、GPS測位精度が高いと判断される。尚、優先度設定部22は、各車両における高精度位置特定装置12のGPS測位精度に関する情報を、各車両との路車間通信を介して毎回取得してもよいし、各車両のGPS測位精度を取得したときに各車両のIDに対応付けてマップに記録しておき、以後、マップに基づいて各車両のGPS測位精度を判断してもよい。
【0066】
次いで、優先度設定部22は、交差点までの距離がL1〜L2の範囲内の各車両に対して、それらの車両に搭載される高精度位置特定装置12のGPS測位精度に応じた優先順位を付与する(S304)。この際、精度の高い高精度位置特定装置12を搭載する車両ほど高い優先順位が付与される。このようにして、各車両は、交差点手前L2以内に入った段階で優先順位が付与されていく。従って、本ステップ304で付与される優先順位は、上記ステップ300で特定された車両間でのみ有効である。しかしながら、優先度設定部22は、前回周期以前の本ステップ304の処理により既に付与している優先順位(即ち、今回の優先順位付与処理の時点で既に交差点までの距離がL1内になった車両に対して前回処理時に付与した優先順位。)を考慮して、交差点までの距離L2以内の全車両間で通用する優先順位を付与することとしてもよい。この場合、交差点までの距離がL1〜L2の範囲内の各車両のうち、GPS測位精度の最も高い車両には、交差点までの距離がL1内にあり且つ未だ交差点を通過し終えていない各車両に既に付与している優先順位(即ち、付与済みの優先順位)のうちの、最低優先順位よりも1つだけ順位の低い優先順位が付与されることになる。
【0067】
尚、このようにして優先順位が付与されると、各車両には、その優先順位に応じて環境力アルゴリズムが適用されることになる(図2のS270参照)。
【0068】
次いで、優先度設定部22は、その後変化する各車両の交差点までの距離と、上記ステップ304で付与した優先順位との関係を監視し、必要に応じて、付与した優先順位の補正を行う(S306)。例えば、GPS測位精度が劣る故に低い優先順位が付された車両が、高い優先順位の車両よりも、余裕距離ΔL以上交差点に近くなった場合、優先度設定部22は、これらの2車両の優先順位の入れ替えを行う。即ち、GPS測位精度が劣る故に低い優先順位が付された車両に対して、高い優先順位が付与される。尚、かかる優先順位の補正処理は、原則的には必要でなく、あくまでフェールセーフとして機能する。なぜならば、上述の如く、低い優先順位が付された車両は、その時点から上述の如く環境力の作用により減速を強いられるため(図2のS270参照)、それ以上大きな減速度で高い優先順位の車両が自主的に減速しない限り、当該高い優先順位の車両よりも余裕距離ΔL以上交差点に近くなることがないからである。
【0069】
このように本実施例によれば、交差点に早く近づいた方に高い優先順位を付与するルールを基本としつつ、各車両における高精度位置特定装置12のGPS測位精度の相違が補償されるので、各車両の高精度位置特定装置12のGPS測位精度の相違による不公平や不都合を是正して、適切な優先順位を付与することができる。また、高い精度の高精度位置特定装置12を搭載する車両に対して高い優先順位を付与することで、高機能の高精度位置特定装置12を搭載する故に却って低い優先順位が付与されるという不条理が防止されると共に、制御の信頼性も高めることができる。
【0070】
尚、複数の車両が協働して、車車間通信を介して自律的に交差点通過判断アルゴリズムを実現する構成では、各車両は、それぞれの交差点までの距離が、自車両の高精度位置特定装置12による測位結果に基づいてL2以内になった時点で、車車間通信により、交差点までの距離がL1〜L2の範囲内にある他車両と互いのGPS測位精度を比較し合うことで、優先順位を決定し合えばよい。この場合、例えば他車両における高精度位置特定装置12のGPS測位精度が自車両の同GPS測位精度よりも高ければ、他車両に自車両よりも高い優先順位が設定されることになる。また、同様に、各車両は、その後変化する各車両の交差点までの距離と、優先順位との関係を監視し、必要に応じて優先順位の補正を行えばよい。
【実施例2】
【0071】
図4は、実施例2に係る優先度設定アルゴリズム(図2のS240)の主要部を示すフローチャートである。尚、この実施例2に係る優先度設定アルゴリズムは、上述又は後述の他の優先度設定アルゴリズムと背反するものでなく、任意の組み合わせで適用可能である。
【0072】
先ず、優先度設定部22は、各車両との路車間通信を介して取得した現在位置情報に基づいて、優先度設定区間内に存在する車両を特定する(S400)。ここで、優先度設定区間は、上述の実施例1と同様、交差点手前L1〜L2[m]の範囲内の区間としてよい。尚、ここでは、説明の複雑化を防止するため、各車両における高精度位置特定装置12のGPS測位精度は同等であるとするが、上述の実施例1のようにGPS測位精度の相違を考慮することは可能である。
【0073】
優先度設定部22は、優先度設定区間内の各車両に対して、それらの車両に搭載されるナビゲーションシステムによるそれぞれの案内ルートに従って走行しているか否かを判断する(S402)。尚、ナビゲーションシステムの案内ルートとは、公知の如く、ユーザによる設定された目的地に応じて探索され、ナビゲーションシステムのディスプレイ上の地図に表示されるルート(推奨経路)である。
【0074】
次いで、優先度設定部22は、優先度設定区間内に存在する各車両に対して、各車両の交差点における進入態様を予測する(S403)。ここで、進入態様には、交差点を直進する態様、左折する態様、及び、右折する態様の3通りがある。ナビゲーションシステムの案内ルートに従って走行している車両に対しては、方向指示器により異なる進入態様が意思表示されている場合を除き、案内ルートに従った進入態様が判断される(即ち、案内ルートが交差点の直進を指示するものであれば、その車両の進入態様は“直進”と判断される)。ナビゲーションシステムの案内ルートに従って走行していない車両に対しては、方向指示器により異なる進入態様が意思表示されている場合を除き、交差点を直進するものと判断される。
【0075】
次いで、優先度設定部22は、上記ステップ402,403における判断結果に応じた優先順位を付与する(S404)。この際、優先度設定部22は、直進が予測される車両に対しては右左折が予測される車両よりも高い優先順位を付与する。これは、右左折を行う車両は交差点手前で減速が必要となるので、かかる車両に対して環境力を作用させた方がエネルギ効率が良いからである。但し、直進が予測される車両が複数存在する場合、案内ルートに従って走行している車両に対しては、案内ルートに従って走行していない車両よりも高い優先順位が付与される。また、直進が予測され、且つ、案内ルートに従って走行している車両が複数存在する場合には、交差点までの距離がL1に近い車両から順に高い優先順位が付与される。同様に、直進が予測され、且つ、案内ルートに従って走行していない車両が複数存在する場合には、交差点までの距離がL1に近い車両から順に高い優先順位が付与される(但し、上述の如く、案内ルートに従って走行している車両よりも低い優先順位が付与される。)。尚、本ステップ404で付与される優先順位は、上記ステップ400で特定された車両間でのみ有効である。しかしながら、優先度設定部22は、前回周期以前の本ステップ404の処理により既に付与している優先順位(即ち、今回の優先順位付与処理の時点で既に交差点までの距離がL1内になった車両に対して、前回処理時に付与した優先順位。)を考慮して、交差点までの距離L2以内の全車両間で通用する優先順位を付与することとしてもよい。
【0076】
尚、このようにして優先順位が付与されると、各車両には、その優先順位に応じて環境力アルゴリズムが適用されることになる(図2のS270参照)。
【0077】
次いで、優先度設定部22は、その後変化する各車両の交差点までの距離と、上記ステップ404で付与した優先順位との関係を監視し、必要に応じて、付与した優先順位の補正を行う(S406)。例えば、低い優先順位が付された車両が、高い優先順位の車両よりも、余裕距離ΔL以上交差点に近くなった場合、優先度設定部22は、これらの2車両の優先順位の入れ替えを行う。即ち、低い優先順位が付された車両に対して、高い優先順位が付与される。尚、かかる優先順位の補正処理は、原則的には必要でなく、あくまでフェールセーフとして機能する。なぜならば、上述の如く、低い優先順位が付与された車両は、その時点から上述の如く環境力の作用により減速を強いられるため(図2のS270参照)、それ以上大きな減速度で高い優先順位の車両が自主的に減速しない限り(例えば、直進を予定していたが急きょ右折しようとして減速した場合など)、当該高い優先順位の車両よりも余裕距離ΔL以上交差点に近くなることがないからである。
【0078】
このように本実施例によれば、直進が予定される車両に対して、右左折が予定される車両よりも高い優先順位を付与するルールを基本としつつ、案内ルートに従って走行していない車両には低い優先順位を付与することで、案内ルートに従って走行していない車両における不確定な進入態様の影響を受け難いロバストな制御を実現することができる。即ち、案内ルートに従って走行していない車両は、案内ルートに従って走行している車両よりも、交差点における進入態様の予測が困難であり、それ故に明確な意思表示がない限り直進すると予測せざるを得ないが、直進が右左折に優先するルールでは、案内ルートに従って走行している車両の急な右左折の意思表示により、優先順位の急な変動が必要となり、或いは、他の車両に対して既に行った減速制御が無駄となる(無駄なエネルギーロスが生ずる)。本実施例では、案内ルートに従って走行していない車両には当初から低い優先順位を付与しておくことで、かかる不都合を効果的に防止することができる。
【0079】
尚、複数の車両が協働して、車車間通信を介して自律的に交差点通過判断アルゴリズムを実現する構成では、各車両は、優先度設定区間内で、車車間通信により、互いのルート案内遵守状況を比較し合うことで、優先順位を決定し合えばよい。また、同様に、各車両は、その後変化する各車両の交差点までの距離と、優先順位との関係を監視し、必要に応じて優先順位の補正を行えばよい。
【実施例3】
【0080】
図5は、実施例3に係る優先度設定アルゴリズム(図2のS240)の主要部を示すフローチャートである。尚、この実施例3に係る優先度設定アルゴリズムは、上述又は後述の他の優先度設定アルゴリズムと背反するものでなく、任意の組み合わせで適用可能である。本実施例3は、上述の如く優先順位が決まった後に必要に応じて行う優先順位の変動方法に関するものである。従って、本実施例3は、上述の実施例1,2と組み合わせた場合、上記ステップ306,406における処理に関連する。
【0081】
尚、本実施例3では、前提として、優先順位が付与されると、各車両では運転者による自主的な加速操作は原則的に禁止され、運転者による自主的な制動操作のみが許容される。
【0082】
上述の如く適切なルールに従って優先順位を付与した(S500)後、優先度設定部22は、優先順位を付与した各車両において、運転者による制動操作が行われたか否かを監視する(S502)。運転者による制動操作が行われていない場合、原則として、各車両の優先順位は変更されることなく保持される(S504)。一方、運転者による制動操作が行われた場合、優先度設定部22は、制動操作が行われた車両(以下、「制動車両」という。)の優先順位を判断し、当該優先順位よりも低い優先順位が付与された車両(2台以上でも可。)と、制動車両との間で、優先順位の変動処理を行う(S506)。即ち、制動車両の優先順位を下げ、それに伴い、制動車両よりも低い優先順位が付与された車両の優先順位を上げる。また、制動車両の後続車両に対しても、制動車両の制動による影響を受けるため、優先順位が補正されてよい。
【0083】
このように本実施例によれば、運転者による制動操作が行われる場合を想定して、優先順位を付与した後にも優先順位の再調整を行うことで、優先順位の決定態様に柔軟性を持たせることができ、優先順位付与後の運転者による自主的な制動操作に柔軟に対処しつつ、それにより受ける交通の円滑性への影響を最小限に抑えることができる。
【0084】
尚、複数の車両が協働して、車車間通信を介して自律的に交差点通過判断アルゴリズムを実現する構成では、優先順位決定後に制動操作が行われた車両は、当該車両によりも優先順位が低い車両に対して、車車間通信を介して自己の優先順位の放棄・譲渡を行えばよい。
【実施例4】
【0085】
図6は、実施例4に係る優先度設定アルゴリズム(図2のS240)の主要部を示すフローチャートである。尚、この実施例4に係る優先度設定アルゴリズムは、上述又は後述の他の優先度設定アルゴリズムと背反するものでなく、任意の組み合わせで適用可能である。
【0086】
先ず、優先度設定部22は、各車両との路車間通信を介して取得した現在位置情報に基づいて、優先度設定区間内に存在する車両を特定する(S600)。ここで、優先度設定区間は、上述の実施例1と同様、交差点手前L1〜L2[m]の範囲内の区間としてよい。尚、ここでは、説明の複雑化を防止するため、各車両における高精度位置特定装置12のGPS測位精度は同等であるとするが、上述の実施例1のようにGPS測位精度の相違を考慮することは可能である。
【0087】
次いで、優先度設定部22は、優先度設定区間内に存在する各車両に対して、各車両の交差点における進入態様を予測する(S602)。上述の如く、進入態様には、交差点を直進する態様、左折する態様、及び、右折する態様の3通りがある。ナビゲーションシステムの案内ルートに従って走行している車両に対しては、方向指示器により異なる進入態様が意思表示されている場合を除き、案内ルートに従った進入態様が判断される。ナビゲーションシステムの案内ルートに従って走行していない車両に対しては、方向指示器により異なる進入態様が意思表示されている場合を除き、交差点を直進するものと判断される。
【0088】
次いで、優先度設定部22は、各車両の交差点における進入態様の予測結果に応じて、優先順位を付与する(S604)。この際、優先度設定部22は、直進が予測される車両に対しては、右左折が予測される車両よりも高い優先順位を付与する。これは、右左折を行う車両は交差点手前で減速が必要となるので、かかる車両に対して環境力を作用させた方が効率的であるからである。また、優先度設定部22は、直進が予測される車両が複数存在する場合、各自の車両から見て左側にある左側車両に対して高い優先順位を付与する。即ち、左方優先の原則が適用されて、左側から来る車両が優先される。尚、本ステップ604で付与される優先順位は、上記ステップ600で特定された車両間でのみ有効である。しかしながら、優先度設定部22は、前回周期以前の本ステップ604の処理により既に付与している優先順位(即ち、今回の優先順位付与処理の時点で既に交差点までの距離がL1内になった車両に対して、前回処理時に付与した優先順位。)を考慮して、交差点までの距離L2以内の全車両間で通用する優先順位を付与することとしてもよい。
【0089】
尚、このようにして優先順位が付与されると、各車両には、その優先順位に応じて環境力アルゴリズムが適用されることになる(図2のS270参照)。
【0090】
次いで、優先度設定部22は、直進が予測されて高い優先順位を付与した各車両において、進路変更の意思表示が新たに行われたか否かを監視する(S606)。直進が予測されている車両において、進路変更の意思表示が新たに行われていない場合、原則として、各車両の優先順位は変更されることなく保持される(S608)。一方、優先度設定部22は、進路変更の意思表示(即ち、右左折の意思表示)が新たに示された場合、当該車両(以下、「進路変更車両」という。)の優先順位を判断し、当該優先順位よりも低い優先順位が付与された車両(2台以上でも可。)と、当該進路変更車両との間で、優先順位の変動処理を行う(S610)。即ち、進路変更車両の優先順位を下げ、それに伴い、制動車両よりも低い優先順位が付与された車両、特に進路変更車両から見て右側にあり且つ交差点での直進意思が検出される右側車両、の優先順位を上げる。また、制動車両の後続車両に対しても、制動車両の制動による影響を受けるため、優先順位が補正されてよい。
【0091】
このように本実施例によれば、直進且つ左側車両優先のルールを基本としつつ、当該ルールに従って優先順位を付与した後に新たな進路変更の意思表示が行われる場合を想定して、優先順位を付与した後にも優先順位の再調整を行うことで、新たな進路変更の意思表示に柔軟に対処しつつ、それにより受ける交通の円滑性への影響を最小限に抑えることができる。
【0092】
尚、複数の車両が協働して、車車間通信を介して自律的に交差点通過判断アルゴリズムを実現する構成では、各車両は、優先度設定区間内で、車車間通信により、互いの進入態様(進路)を比較し合うことで、優先順位を決定し合えばよい。また、優先順位決定後に進路変更の意思表示を行った車両は、当該車両によりも優先順位が低い車両、特に、当該車両から見て右側にあり且つ交差点での直進意思が検出される右側車両に対して、車車間通信を介して自己の優先順位の放棄・譲渡を行えばよい。
【実施例5】
【0093】
図7は、実施例5に係る優先度設定アルゴリズム(図2のS240)の主要部を示すフローチャートである。尚、この実施例4に係る優先度設定アルゴリズムは、上述又は後述の他の優先度設定アルゴリズムと背反するものでなく、任意の組み合わせで適用可能である。
【0094】
先ず、優先度設定部22は、各車両との路車間通信を介して取得した現在位置情報に基づいて、優先度設定区間内に存在する車両を特定する(S700)。ここで、優先度設定区間は、上述の実施例1と同様、交差点手前L1〜L2[m]の範囲内の区間としてよい。尚、ここでは、説明の複雑化を防止するため、各車両における高精度位置特定装置12のGPS測位精度は同等であるとするが、上述の実施例1のようにGPS測位精度の相違を考慮することは可能である。
【0095】
次いで、優先度設定部22は、一般的なルールを適用して、優先度設定区間内に存在する各車両に対して優先順位を付与する(S702)。一般的なルールとしては、例えば、先ず、各車両の車速情報に基づいて、所定速度以下の車両は非優先車両とされる。次に、交差点で交差する各道路の特性によって判断される。道路幅に差があれば幅が広い道路の方が優先となる。道路情報に交差道路のうちいずれが優先道路か特別の指定がある場合、それに従ってもよい。次に、道路特性による優先度が同一の場合(例えば、道路幅が略等しい場合)、各車両の位置情報(及び車速情報)に基づいて、交差点手前L1mの地点に早く到達する順に優先順位が付される。次に、それでも優先順位が決まらないときは、左方優先の原則を適用し、左側から来る車両が優先される。
【0096】
例えば4方向から略同時に交差点に車両が接近してきた場合など、かかる一般的なルールによる優先順位を付与が困難な場合(S704のYES)、優先度設定部22は、ステップ706以降の例外的なルールによる優先順位付与処理を開始する。
【0097】
具体的には、先ず、優先度設定部22は、優先順位の決定を行うべき各車両との路車間通信を介して、各車両の車両情報・乗員情報を取得する(S706)。車両情報・乗員情報は、各車両において、各種センサの出力信号やメモリ等に記憶された各種情報に基づいて生成される。各車両の車両情報・乗員情報は、各車両との路車間通信を介して毎回取得されてもよいし、一回取得した後は各車両のIDに対応付けてマップに記録され、以後、各車両のIDだけ取得してマップに基づいて判断されてもよい。
【0098】
次いで、優先度設定部22は、取得した各車両の車両情報・乗員情報に基づいて、緊急車両(例えば消防車や救急車)が存在するか否かを判断する(S708)。緊急車両が存在する場合、優先度設定部22は、当該緊急車両に対して高い優先度を付与する。
【0099】
次いで、優先度設定部22は、取得した各車両の車両情報・乗員情報に基づいて、病人や妊婦等の緊急の手当てを要する人を搬送している一般車両が存在するか否かを判断する(S710)。病人等を搬送している一般車両が存在する場合、優先度設定部22は、当該車両に対して高い優先度を付与する。
【0100】
次いで、優先度設定部22は、取得した各車両の車両情報・乗員情報に基づいて、バス等の公共車両が存在するか否かを判断する(S712)。公共車両が存在する場合、優先度設定部22は、当該車両に対して高い優先度を付与する。
【0101】
次いで、優先度設定部22は、取得した各車両の車両情報・乗員情報に基づいて、ハンディキャップドライバが運転する車両が存在するか否かを判断する(S714)。ハンディキャップドライバが運転する車両が存在する場合、優先度設定部22は、当該車両に対して高い優先度を付与する。
【0102】
次いで、優先度設定部22は、取得した各車両の車両情報・乗員情報に基づいて、高齢者が運転する車両が存在するか否かを判断する(S716)。高齢者が運転する車両が存在する場合、優先度設定部22は、当該車両に対して高い優先度を付与する。
【0103】
次いで、優先度設定部22は、取得した各車両の車両情報・乗員情報に基づいて、高齢者が運転する車両が存在するか否かを判断する(S718)。初心者が運転する車両が存在する場合、優先度設定部22は、当該車両に対して高い優先度を付与する。
【0104】
このように本実施例によれば、一般的なルールによる優先順位の決定が困難ないし不能な例外的な場合にも、適切に優先順位を決定することができる。尚、例えば緊急車両等については、一般的なルールに優先して最も高い優先順位が付与されてもよい。また、上述の実施例では、緊急車両、病人等を搬送している一般車両、公共車両、ハンディキャップドライバが運転する車両、高齢者が運転する車両、初心者が運転する車両の順に高い優先順位が付与されているが、かかる順番は必要に応じて適宜変更されてもよい。
【0105】
また、本実施例において、各車両の輸送効率、停止能力を考慮して、乗員数の多い車両に対して高い優先度を付与することとしてもよい。例えば、バス同士で競合した場合には、乗員数の多い方のバスに対して高い優先度を付与することとしてもよい。
【実施例6】
【0106】
図8は、実施例6に係る優先度設定アルゴリズム(図2のS240)の主要部を示すフローチャートである。尚、この実施例6に係る優先度設定アルゴリズムは、上述又は後述の他の優先度設定アルゴリズムと背反するものでなく、任意の組み合わせで適用可能である。
【0107】
先ず、優先度設定部22は、各車両との路車間通信を介して取得した現在位置情報に基づいて、優先度設定区間内に存在する車両を特定する(S800)。ここで、優先度設定区間は、上述の実施例1と同様、交差点手前L1〜L2[m]の範囲内の区間としてよい。尚、ここでは、説明の複雑化を防止するため、各車両における高精度位置特定装置12のGPS測位精度は同等であるとするが、上述の実施例1のようにGPS測位精度の相違を考慮することは可能である。
【0108】
次いで、優先度設定部22は、一般的なルールを適用して、優先度設定区間内に存在する各車両に対して優先順位を付与する(S802)。一般的なルールとしては、例えば、先ず、各車両の車速情報に基づいて、所定速度以下の車両は非優先車両とされる。次に、交差点で交差する各道路の特性によって判断される。道路幅に差があれば幅が広い道路の方が優先となる。道路情報に交差道路のうちいずれが優先道路か特別の指定がある場合、それに従ってもよい。次に、道路特性による優先度が同一の場合(例えば、道路幅が略等しい場合)、各車両の位置情報(及び車速情報)に基づいて、交差点手前L1mの地点に早く到達する順に優先順位が付される。
【0109】
例えば2以上の方向から略同時に交差点に車両が接近してきた場合など、かかる一般的なルールによる優先順位を付与が困難な場合(S804のYES)、優先度設定部22は、ステップ806以降の例外的なルールによる優先順位付与処理を開始する。
【0110】
具体的には、先ず、優先度設定部22は、優先順位の決定を行うべき各車両との路車間通信を介して、各車両の車両属性情報を取得する(S806)。車両属性情報は、車両毎に異なりうるブレーキ性能・加速性能のような、車両の個々の属性に関する情報であり、本例では、車両属性情報は、車両の使用拠点に関する地理的情報である。具体的には、かかる地理的情報は、車両の車庫の住所、所有者の住所、主たる行動範囲(例えば、実際の移動軌跡に基づいて導出。)を示す住所(区域名、都道府県名)であってよい。車両属性情報は、各車両との路車間通信を介して毎回取得されてもよいし、一回取得した後は各車両のIDに対応付けてマップに記録され、以後、各車両のIDだけ取得してマップに基づいて判断されてもよい。
【0111】
次いで、優先度設定部22は、取得した各車両の車両属性情報に基づいて、地元車両(地元住民が運転する車両又は交差点付近の地域を本拠地としている車両)が存在するか否かを判断する(S808)。地元車両が存在する場合、優先度設定部22は、当該地元車両に対して高い優先度を付与する。地元車両が存在しない場合は、優先度設定部22は、左方優先の原則を適用し、左側から来る車両に対して高い優先度を付与する。
【0112】
このように本実施例によれば、交差点周辺の地理に詳しい運転者が運転している車両に高い優先順位を付与することで、交差点周辺の地理に疎い運転者が運転している車両において発生しやすい急な進路変更や減速によって、交差点の交通の円滑性が損なわれることが効果的に防止される。
【0113】
尚、本実施例において、同様の観点から、各車両の交差点の使用回数(通過回数)を交差点毎にカウントして、各車両のIDに対応付けて記録しておき、交差点の使用回数が所定回数以上の車両に対して高い優先順位を付与することも可能である。
【実施例7】
【0114】
図9は、実施例7に係る優先度設定アルゴリズム(図2のS240)の主要部を示すフローチャートである。尚、この実施例7に係る優先度設定アルゴリズムは、上述又は後述の他の優先度設定アルゴリズムと背反するものでなく、任意の組み合わせで適用可能である。
【0115】
先ず、優先度設定部22は、各車両との路車間通信を介して取得した現在位置情報に基づいて、優先度設定区間内に存在する車両を特定する(S900)。ここで、優先度設定区間は、上述の実施例1と同様、交差点手前L1〜L2[m]の範囲内の区間としてよい。尚、ここでは、説明の複雑化を防止するため、各車両における高精度位置特定装置12のGPS測位精度は同等であるとするが、上述の実施例1のようにGPS測位精度の相違を考慮することは可能である。
【0116】
次いで、優先度設定部22は、優先度設定区間内に存在する各車両との路車間通信を介して、各車両のID(車両ID)を、各車両の車両属性情報として取得する(S902)。車両IDは、自動車登録番号(系列外特殊車両を含む)、陸運事務所所管コード、通信用無線局識別符号(例えば電話番号、コールサイン、IP番号等)のような適切なIDコードであればよい。
【0117】
優先度設定部22は、各車両IDと対応付けて予め定められた優先順位設定マップを参照して、各車両IDに対応する優先順位を、各車両に対して付与する(S904)。各車両IDと優先順位との対応関係は、原則的には、緊急性・公共性の高い車両に対して高い優先順位が設定されるように定義され、一般車両に対しては車両登録時の時系列順に高い優先順位が設定されるように定義されてよい。例えば、一般車両に対して、車両登録が新しいほど(又は古いほど)高い優先順位が設定されるように定義されてよい。また、公平さを平準化する目的で、各車両IDと優先順位との対応関係が定期的に変更されてもよい。或いは、優良ドライバの車両や交通規範遵守性の高い車両に対して定期的に優先順位が繰上げされてもよい。
【0118】
尚、複数の車両が協働して、車車間通信を介して自律的に交差点通過判断アルゴリズムを実現する構成では、各車両は、同一の対応関係が定義された共通の優先順位設定マップに付与することで、当該共通の優先順位設定マップに基づいた矛盾のない優先順位の自立的な決定が可能である。
【実施例8】
【0119】
図10は、実施例8に係る優先度設定アルゴリズム(図2のS240)の主要部を示すフローチャートである。尚、この実施例8に係る優先度設定アルゴリズムは、上述の他の優先度設定アルゴリズムと背反するものでなく、任意の組み合わせで適用可能である。
【0120】
先ず、優先度設定部22は、各車両との路車間通信を介して取得した現在位置情報に基づいて、優先度設定区間内に存在する車両を特定する(S910)。ここで、優先度設定区間は、上述の実施例1と同様、交差点手前L1〜L2[m]の範囲内の区間としてよい。尚、ここでは、説明の複雑化を防止するため、各車両における高精度位置特定装置12のGPS測位精度は同等であるとするが、上述の実施例1のようにGPS測位精度の相違を考慮することは可能である。
【0121】
次いで、優先度設定部22は、優先度設定区間内に存在する各車両との路車間通信を介して、各車両のサイズ(例えばホイールベース長、重量)を、各車両の車両属性情報として取得する(S912)。
【0122】
次いで、優先度設定部22は、複数の車両が群(隊列)をなして交差点に接近しているか否かを判断する(S914)。優先度設定部22は、例えば、所定車間距離且つ所定速度差を満たしつつ同一方向に走行する複数車両が存在する場合、それら複数車両は群をなしていると判断してよい。
【0123】
例えば、図11(A)に示す交差点状況のように、複数の車両が群(隊列)をなして交差点に接近している場合(S914のYES)、優先度設定部22は、当該群の全体長さ(例えば各車両の長さ(ホイールベース長)の合計や、当該合計長さに各車間距離を加えた長さ。)を、当該群の先頭車両のサイズに置き換える(S916)。
【0124】
次いで、優先度設定部22は、各方向から交差点に接近してくる先頭車両同士のサイズを比較し、サイズの大きい方に高い優先順位を付与する(S918)。従って、上述の如く車群の先頭車両には、単独で交差点に接近してくる先頭車両、又は、より短い長さの車群の先頭車両よりも高い優先順位が付与される。例えば図11(A)に示す例では、本来的には左方優先の原則により優先車両となるべき車両Xよりも、車群の先頭車両X2の方が高い優先順位が付与される。この場合、車群として交差点をまとめて通過させた方が効率的であることから、先頭車両X2の後続車両X2,3に対しても、車両Xよりも高い優先順位が付与されてよい。また、図11(B)に示す交差点状況のように、群をなさない単独の車両同士であれば、サイズの大きい方の車両X2(トラックやバス等の大型車両)に対して高い優先順位が付与される。これは、大きなサイズの車両に減速を強いる方が、エネルギ損失が大きいからである。
【0125】
尚、このようにして優先順位が付与されると、各車両には、その優先順位に応じて環境力アルゴリズムが適用されることになる(図2のS270参照)。
【0126】
このように本実施例によれば、各車両のサイズに基づいて、優先順位付与後の環境力アルゴリズムの適用により失われる全体のエネルギ量が可能な限り小さくなるように、優先順位が決定されるので、エネルギ効率的な観点からも円滑で効率的な交差点の交通制御を実現することができる。
【実施例9】
【0127】
実施例9以降は、上述の優先度設定アルゴリズムを実現できない車両、即ち、例えば図1に示すような車両側構成の一部を備えていない(例えば通信装置14を搭載しない車両)を考慮した各種実施例に関する。以下、上述の優先度設定アルゴリズムを実現できない車両を、「非搭載車両」と称する。尚、以下の各種実施例は、非搭載車両が無くなるまでの過渡期において有用であると共に、非搭載車両が無くなった後においても、ある車両において例えば通信装置14の故障等が生じた場合には実質的に“非搭載車両”が存在することになるので依然として有用である。
【0128】
図12は、非搭載車両における車両側構成の一例を示すブロック図である。非搭載車両は、通信装置44、及び、ナビゲーションシステム46を備える。通信装置44は、上述の通信装置14とは異なり、高い通信機能(即ち、優先順位の設定のための各種通信機能。)を実現するものでなくてよい。
【0129】
ナビゲーションシステム46は、交差点情報を含む地図データベースを含む。交差点情報は、各交差点の位置情報、各交差点の属性情報(交差点属性情報)を含む。交差点属性情報は、当該交差点が上述の優先度設定アルゴリズムによる交通制御が実現される交差点であるか否かの情報を含む。尚、以下、上述の優先度設定アルゴリズムによる交通制御が実現される交差点を、「サービス交差点」という。
【0130】
ナビゲーションシステム46は、ユーザによる設定された目的地までのルート探索機能を備える。但し、本実施例のナビゲーションシステム46は、ルート探索時、サービス交差点を極力通過しないようなルート探索を行う機能(以下、「サービス交差点回避ルート探索機能」という)を有する。これにより、上述の優先度設定アルゴリズムを適用できない非搭載車両が混在することに起因して、上述の各実施例による円滑な交差点の交通制御が妨げられるような事態を防止することができる。尚、サービス交差点がインフラ整備により増加するのに対応して、ナビゲーションシステム46の交差点情報は、随時新しい情報に更新される。これは、最新の交差点情報を保持する管制側構成(又はセンタ施設)から最新の交差点情報をダウンロードすることで実現されてよい。
【実施例10】
【0131】
図13は、非搭載車両が組み込まれた車両制御システムの一実施例を示すシステム構成図である。非搭載車両は、通信装置44、及び、ナビゲーションシステム46を備える。通信装置44は、上述の通信装置14とは異なり、高い通信機能(即ち、優先順位の設定のための各種通信機能。)を実現するものでなくてよい。また、ナビゲーションシステム46は、上述の実施例9で説明したサービス交差点回避ルート探索機能を有さなくてもよい。
【0132】
図13に示すように、車両側構成は、図1に示す構成に加えて、対非搭載車両用の構成として、非搭載車両の通信装置44との間で路車間通信を実現するための対非搭載車両用の通信装置30と、対非搭載車両用のナビゲーション部36とを備える。
【0133】
図14は、実施例10に係る優先度設定アルゴリズムの主要部を示すフローチャートである。
【0134】
先ず、ステップ1000では、対非搭載車両用のナビゲーション部36は、非搭載車両の通信装置44による非搭載車両との間で路車間通信を介して、非搭載車両の目的地情報を取得する。
【0135】
対非搭載車両用のナビゲーション部36は、取得した非搭載車両の目的地情報に基づいて、非搭載車両の現在位置から目的地までの推奨ルートを探索する(S1002)。このとき、ナビゲーション部36は、非搭載車両がサービス交差点を極力通過しないようなルート探索を行う。尚、ナビゲーション部36は、サービス交差点の位置情報を保有するデータベースを備える。サービス交差点がインフラ整備により増加するのに対応して、データベースが随時更新される。また、ナビゲーション部36は、各サービス交差点における交通量を考慮して、推奨ルートを探索してもよい。例えば、交通量の非常に少ないサービス交差点に対しては、非搭載車両の通過が許容され、交通量の非常に多いサービス交差点に対しては、非搭載車両の通過が絶対的に禁止されるような推奨ルートを探索してもよい。
【0136】
対非搭載車両用のナビゲーション部36は、探索して得た推奨ルートを、非搭載車両との間で路車間通信を介して、非搭載車両に提供する(S1004)。
【0137】
非搭載車両におけるナビゲーションシステム46は、かかる推奨ルートを通信装置44を介して受信すると、当該推奨ルートをディスプレイに表示し、音声案内等により当該推奨ルートに従ったルート案内を行う(S1006)。このとき、ナビゲーションシステム46は、自身で既に探索した推奨ルートに従ってルート案内を行っている場合でも、対非搭載車両用のナビゲーション部36からの推奨ルートに従ってルート案内を行う。
【0138】
このように本実施例10によれば、上述の実施例9と同様、上述の優先度設定アルゴリズムを適用できない非搭載車両が混在することに起因して、上述の各実施例1ないし8による円滑な交差点の交通制御が妨げられるような事態を防止することができる。
【0139】
尚、本実施例において、対非搭載車両用のナビゲーション部36は、非搭載車両の目的地までの完全な推奨ルートを提供するのではなく、一時的な回避ルート(サービス交差点を回避できるようなルート。)を提供することとしてもよい。例えば、サービス交差点を回避できるような迂回路が存在する場合には、当該迂回路を回避ルートとして提供することとしてもよい。
【0140】
尚、本実施例において、サービス交差点に電子案内板のようなインフラ設備が存在する場合、当該電子案内板を用いて、非搭載車両の運転者が目視できるような態様で、回避ルートを出力してもよい。
【実施例11】
【0141】
図15は、実施例11に係る優先度設定アルゴリズムの主要部を示すフローチャートである。
【0142】
先ず、ステップ1010では、対非搭載車両用のナビゲーション部36は、非搭載車両の通信装置44による非搭載車両との間で路車間通信を介して、サービス交差点に接近する非搭載車両を検出する。尚、非搭載車両の存在は、当該存在を検出できる他の車両(例えば非搭載車両の後続車両。)からの情報提供を受けて検出されてもよいし、サービス交差点に設置されたカメラなどのインフラ設備により検出されてもよい。また、非搭載車両の存在は、それを検出した隣接するサービス交差点の管制側構成からの情報提供によって検出されてもよい。
【0143】
非搭載車両を検出すると、対非搭載車両用のナビゲーション部36は、当該非搭載車両のサービス交差点への進入不可避状態であるか否かを判断する(S1012)。例えば、上述の如く迂回路を案内するなどが可能な場合、進入不可避状態で無いと判断され、迂回路を案内するなどして、非搭載車によるサービス交差点への進入を防止する(S1014)。
【0144】
非搭載車両のサービス交差点への進入不可避状態であると判断した場合、非搭載車両用のナビゲーション部36は、優先度設定部22に対して、進入不可避状態にある非搭載車両の存在を通知する(S1016)。
【0145】
この通知を受けた優先度設定部22は、非搭載車両に対して(必要に応じて、それに後続する車両に対しても)、低い優先度を付与し(S1018)、他の優先度の高い車両との関係で適切なサービス交差点への接近態様及び進入態様を決定して、ナビゲーション部36に通知する(S1020)。
【0146】
この通知を受けたナビゲーション部36は、優先度設定部22にて決定された接近態様及び進入態様を、非搭載車両に提供する(S1022)。
【0147】
非搭載車両におけるナビゲーションシステム46は、かかる接近態様及び進入態様を通信装置44を介して受信すると、当該接近態様及び進入態様を、音声案内等により当該非搭載車両の運転者に報知する(S1024)。
【0148】
このように本実施例11によれば、上述の実施例9、10と同様、上述の優先度設定アルゴリズムを適用できない非搭載車両が混在することに起因して、上述の各実施例1ないし8による円滑な交差点の交通制御が妨げられるような事態を防止することができる。また、非搭載車両のサービス交差点への進入が避けられない場合には、当該非搭載車両に低い優先順位を付与することで、当該非搭載車両が、他の搭載車両に可能な限り迷惑を掛けない態様で、サービス交差点を通過できるようにすることができる。
【0149】
尚、本実施例において、サービス交差点に電子案内板や信号機に相当するインフラ設備(本来的には不要であるが、臨時的に用いる信号機。)が存在する場合、当該インフラ設備を用いて、非搭載車両の運転者が目視できるような態様で、非搭載車両に対して、優先度設定部22にて決定された接近態様及び進入態様を通知してもよい。例えば、通常の信号機と同様、非搭載車両が進入可能な状態となるまで、信号機を赤色に点灯して停止を指示してよい。尚、かかる信号機は、太陽電池を電力源とし、消費電力等で有利なLED(light−emitting diode)により構成された路面埋め込み型のランプであってよい。
【実施例12】
【0150】
図16は、実施例12に係る車両制御システムにおける管制側構成の一実施例を示すブロック図である。
【0151】
図16に示すように、実施例12に係る車両側構成は、図12に示す構成に加えて、対非搭載車両用の構成として、非搭載車両監視部38とを備える。
【0152】
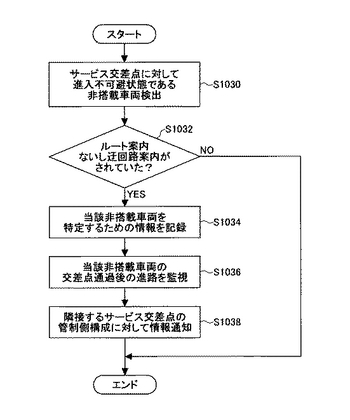
図17は、非搭載車両監視部38において実現される非搭載車両監視アルゴリズムの主要部を示すフローチャートである。
【0153】
サービス交差点に対して進入不可避状態である非搭載車両が検出されると(S1030)、非搭載車両監視部38は、当該非搭載車両に対して、当該サービス交差点を回避するためのルート案内ないし迂回路案内がなされていたか否かを判断する(S1032)。サービス交差点を回避するためのルート案内ないし迂回路案内がなされていなかった場合、そのまま終了する。
【0154】
サービス交差点を回避するためのルート案内ないし迂回路案内がなされていたにも拘らず、それに従わずに接近してきた非搭載車両に対しては、非搭載車両監視部38は、当該非搭載車両を特定するための情報を記録する(S1034)。この情報は、車両の番号(ナンバープレートの番号)等を含み、サービス交差点にカメラが設置されている場合は、当該カメラからの画像に基づいて生成されてよい。
【0155】
次いで、非搭載車両監視部38は、非搭載車両の交差点通過後の進路を監視し(S1036)、必要に応じて、隣接するサービス交差点の管制側構成に対して、非搭載車両がそちらのサービス交差点に向かう旨通知する(S1038)。非搭載車両監視部38は、他のサービス交差点における非搭載車両監視部38と協働して、サービス交差点を回避するためのルート案内ないし迂回路案内がなされていたにも拘らず、それに従わずに接近・通過した非搭載車両に対して、その違反回数や頻度を算出・記録してもよい。
【0156】
以上、本発明の好ましい実施例について詳説したが、本発明は、上述した実施例に制限されることはなく、本発明の範囲を逸脱することなく、上述した実施例に種々の変形及び置換を加えることができる。
【0157】
特に上述した各実施例に係る優先度設定アルゴリズム(優先順位付与ルール)は任意に組み合わせることができる。この場合、優先順位を決定する因子が数多くある場合は、各因子毎にポイント加算方式で各車両にポイントを付与し、ポイントの大きい車両から順に高い優先順位を付してもよい。
【図面の簡単な説明】
【0158】
【図1】本発明による車両制御システムの基本実施態様を示すシステム構成図である。
【図2】基本実施態様に係る交差点通過判断アルゴリズムの流れを示すフローチャートである。
【図3】実施例1に係る優先度設定アルゴリズムの主要部を示すフローチャートである。
【図4】実施例2に係る優先度設定アルゴリズムの主要部を示すフローチャートである。
【図5】実施例3に係る優先度設定アルゴリズムの主要部を示すフローチャートである。
【図6】実施例4に係る優先度設定アルゴリズムの主要部を示すフローチャートである。
【図7】実施例5に係る優先度設定アルゴリズムの主要部を示すフローチャートである。
【図8】実施例6に係る優先度設定アルゴリズムの主要部を示すフローチャートである。
【図9】実施例7に係る優先度設定アルゴリズムの主要部を示すフローチャートである。
【図10】実施例8に係る優先度設定アルゴリズムの主要部を示すフローチャートである。
【図11】実施例8に係る優先度設定アルゴリズムの説明図である。
【図12】非搭載車両における車両側構成の一例を示すブロック図である。
【図13】非搭載車両が組み込まれた車両制御システムの一実施例を示すシステム構成図である。
【図14】実施例10に係る優先度設定アルゴリズムの主要部を示すフローチャートである。
【図15】実施例11に係る優先度設定アルゴリズムの主要部を示すフローチャートである。
【図16】実施例12に係る車両制御システムにおける管制側構成の一実施例を示すブロック図である。
【図17】実施例12に係る非搭載車両監視アルゴリズムの主要部を示すフローチャートである。
【符号の説明】
【0159】
10 車速記録装置
12 高精度位置特定装置
14 通信装置
16 制駆動力発生装置
18 アクセルペダル反力発生装置
20 環境力発生部
22 優先度設定部
24 座標変換部
26 対象車両選択部
28 通信装置
【特許請求の範囲】
【請求項1】
交差点に進入すべく交差点に接近する車両を検出する車両検出手段と、
交差点への各車両の接近態様を少なくとも1つのパラメータとして、該各車両に対して交差点進入に関する優先度を設定する優先度設定手段と、を備えることを特徴とする車両制御システム。
【請求項2】
設定した優先度に基づいて、優先度が相対的に高い車両が交差点に優先的に進入できるように、交差点への各車両の接近態様を制御する車両制御手段を備える、請求項1に記載の車両制御システム。
【請求項3】
優先度設定手段は、各車両に搭載されたGPS信号に基づく車両位置測位装置の測位精度をパラメータとして、各車両に対して優先度を設定する、請求項1に記載の車両制御システム。
【請求項4】
優先度設定手段は、ナビゲーションシステムの案内ルートに従って走行していない車両に対しては、低い優先度を設定する、請求項1に記載の車両制御システム。
【請求項5】
優先度設定手段は、優先度の高い車両において運転者による制動操作が検出された場合、該車両に対して低い優先度を設定しなおす、請求項1に記載の車両制御システム。
【請求項6】
各自の車両から見て左側にある左側車両において交差点での右左折意思が検出された場合、優先度設定手段は、該左側車両に対して、該左側車両から見て右側にあり且つ交差点での直進意思が検出される右側車両よりも、低い優先度を設定する、請求項1に記載の車両制御システム。
【請求項7】
優先度設定手段は、各車両の乗員に関する乗員情報をパラメータとして、各車両に対して優先度を設定する、請求項1に記載の車両制御システム。
【請求項8】
前記乗員情報は、乗員数を表すことが可能な情報を含み、
優先度設定手段は、乗員数の多い車両に対して高い優先度を設定する、請求項7に記載の車両制御システム。
【請求項9】
前記乗員情報は、高齢者、初心者、急病人のような乗員の個々の属性を表すことが可能な乗員属性情報を含む、請求項7に記載の車両制御システム。
【請求項10】
優先度設定手段は、車両の個々の属性に関する車両属性情報をパラメータとして、各車両に対して優先度を設定する、請求項1に記載の車両制御システム。
【請求項11】
前記車両属性情報は、車両の使用拠点に関する地理的情報を含み、
優先度設定手段は、使用拠点が交差点位置に近い車両に対して高い優先度を設定する、請求項10に記載の車両制御システム。
【請求項12】
前記車両属性情報は、個々の車両毎に異なる車両IDであり、
優先度設定手段は、各車両IDと優先度との所定の対応関係に従って、各車両に対して、それぞれの車両IDに応じた優先度を設定する、請求項10に記載の車両制御システム。
【請求項13】
前記車両属性情報は、車両の公共性を表すことが可能な情報を含み、
優先度設定手段は、公共性の高い車両に対して高い優先度を設定する、請求項10に記載の車両制御システム。
【請求項14】
前記車両属性情報は、車両のサイズを表すことが可能な情報を含み、
優先度設定手段は、サイズの大きい車両に対して高い優先度を設定する、請求項10に記載の車両制御システム。
【請求項15】
前記車両検出手段、前記優先度設定手段及び前記制御手段の少なくとも一部の動作が、各車両に搭載される通信機能付き専用車載機器により協働して実現される、請求項1〜13の何れかに記載の車両制御システム。
【請求項16】
当該車両制御システムによる上記車両制御が適用されるサービス交差点に対する、前記専用車載機器を搭載していない非搭載車両の通行が抑制ないし禁止されるように、非搭載車両の通行ルートを案内するナビゲーション手段を備える、請求項15に記載の車両制御システム。
【請求項17】
前記ナビゲーション手段は、前記サービス交差点に関する最新の交差点情報を収録した地図データベースを備える、請求項16に記載の車両制御システム。
【請求項18】
優先度設定手段は、前記専用車載機器を搭載していない非搭載車両に対して、前記専用車載機器を搭載している車両よりも低い優先度を設定する、請求項15に記載の車両制御システム。
【請求項19】
前記非搭載車両に対して交差点への進入の可否情報を、前記非搭載車両の運転者が目視できるような態様で提供する情報提供手段が、交差点に設置される、請求項18に記載の車両制御システム。
【請求項20】
前記ナビゲーション手段による通行ルートの案内に従わずに前記サービス交差点を通行した非搭載車両を特定する監視手段が、交差点に設置される、請求項16に記載の車両制御システム。
【請求項1】
交差点に進入すべく交差点に接近する車両を検出する車両検出手段と、
交差点への各車両の接近態様を少なくとも1つのパラメータとして、該各車両に対して交差点進入に関する優先度を設定する優先度設定手段と、を備えることを特徴とする車両制御システム。
【請求項2】
設定した優先度に基づいて、優先度が相対的に高い車両が交差点に優先的に進入できるように、交差点への各車両の接近態様を制御する車両制御手段を備える、請求項1に記載の車両制御システム。
【請求項3】
優先度設定手段は、各車両に搭載されたGPS信号に基づく車両位置測位装置の測位精度をパラメータとして、各車両に対して優先度を設定する、請求項1に記載の車両制御システム。
【請求項4】
優先度設定手段は、ナビゲーションシステムの案内ルートに従って走行していない車両に対しては、低い優先度を設定する、請求項1に記載の車両制御システム。
【請求項5】
優先度設定手段は、優先度の高い車両において運転者による制動操作が検出された場合、該車両に対して低い優先度を設定しなおす、請求項1に記載の車両制御システム。
【請求項6】
各自の車両から見て左側にある左側車両において交差点での右左折意思が検出された場合、優先度設定手段は、該左側車両に対して、該左側車両から見て右側にあり且つ交差点での直進意思が検出される右側車両よりも、低い優先度を設定する、請求項1に記載の車両制御システム。
【請求項7】
優先度設定手段は、各車両の乗員に関する乗員情報をパラメータとして、各車両に対して優先度を設定する、請求項1に記載の車両制御システム。
【請求項8】
前記乗員情報は、乗員数を表すことが可能な情報を含み、
優先度設定手段は、乗員数の多い車両に対して高い優先度を設定する、請求項7に記載の車両制御システム。
【請求項9】
前記乗員情報は、高齢者、初心者、急病人のような乗員の個々の属性を表すことが可能な乗員属性情報を含む、請求項7に記載の車両制御システム。
【請求項10】
優先度設定手段は、車両の個々の属性に関する車両属性情報をパラメータとして、各車両に対して優先度を設定する、請求項1に記載の車両制御システム。
【請求項11】
前記車両属性情報は、車両の使用拠点に関する地理的情報を含み、
優先度設定手段は、使用拠点が交差点位置に近い車両に対して高い優先度を設定する、請求項10に記載の車両制御システム。
【請求項12】
前記車両属性情報は、個々の車両毎に異なる車両IDであり、
優先度設定手段は、各車両IDと優先度との所定の対応関係に従って、各車両に対して、それぞれの車両IDに応じた優先度を設定する、請求項10に記載の車両制御システム。
【請求項13】
前記車両属性情報は、車両の公共性を表すことが可能な情報を含み、
優先度設定手段は、公共性の高い車両に対して高い優先度を設定する、請求項10に記載の車両制御システム。
【請求項14】
前記車両属性情報は、車両のサイズを表すことが可能な情報を含み、
優先度設定手段は、サイズの大きい車両に対して高い優先度を設定する、請求項10に記載の車両制御システム。
【請求項15】
前記車両検出手段、前記優先度設定手段及び前記制御手段の少なくとも一部の動作が、各車両に搭載される通信機能付き専用車載機器により協働して実現される、請求項1〜13の何れかに記載の車両制御システム。
【請求項16】
当該車両制御システムによる上記車両制御が適用されるサービス交差点に対する、前記専用車載機器を搭載していない非搭載車両の通行が抑制ないし禁止されるように、非搭載車両の通行ルートを案内するナビゲーション手段を備える、請求項15に記載の車両制御システム。
【請求項17】
前記ナビゲーション手段は、前記サービス交差点に関する最新の交差点情報を収録した地図データベースを備える、請求項16に記載の車両制御システム。
【請求項18】
優先度設定手段は、前記専用車載機器を搭載していない非搭載車両に対して、前記専用車載機器を搭載している車両よりも低い優先度を設定する、請求項15に記載の車両制御システム。
【請求項19】
前記非搭載車両に対して交差点への進入の可否情報を、前記非搭載車両の運転者が目視できるような態様で提供する情報提供手段が、交差点に設置される、請求項18に記載の車両制御システム。
【請求項20】
前記ナビゲーション手段による通行ルートの案内に従わずに前記サービス交差点を通行した非搭載車両を特定する監視手段が、交差点に設置される、請求項16に記載の車両制御システム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2006−338596(P2006−338596A)
【公開日】平成18年12月14日(2006.12.14)
【国際特許分類】
【出願番号】特願2005−165572(P2005−165572)
【出願日】平成17年6月6日(2005.6.6)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成18年12月14日(2006.12.14)
【国際特許分類】
【出願日】平成17年6月6日(2005.6.6)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]