
車両制御システム
【課題】本発明は、記憶手段に記憶した情報によって、事故の原因、過程などの客観的な評価を可能とする車両制御システムを実現することを目的としている。
【解決手段】このため、車両の各種制御を行う複数の制御ユニットと、身体情報制御ユニットと、各制御ユニットからの情報を送信または受信可能とする制御エリア通信手段とを有する車両制御システムにおいて、一の制御ユニットが情報を制御エリア通信手段に載せるように制御する一方、身体情報制御ユニットの情報を制御エリア通信手段に載せるように制御し、制御エリア通信手段に接続される不揮発性の記憶手段を車両制御システムに併設し、車両制御システムが、所定の加速度情報と乗員拘束装置の作動情報とのうち1つ以上の情報が制御エリア通信手段に載せられた際には、載せられた時点を含む前後の所定時間にわたるその情報および心拍数に関する情報を記憶手段に記憶するように制御する。
【解決手段】このため、車両の各種制御を行う複数の制御ユニットと、身体情報制御ユニットと、各制御ユニットからの情報を送信または受信可能とする制御エリア通信手段とを有する車両制御システムにおいて、一の制御ユニットが情報を制御エリア通信手段に載せるように制御する一方、身体情報制御ユニットの情報を制御エリア通信手段に載せるように制御し、制御エリア通信手段に接続される不揮発性の記憶手段を車両制御システムに併設し、車両制御システムが、所定の加速度情報と乗員拘束装置の作動情報とのうち1つ以上の情報が制御エリア通信手段に載せられた際には、載せられた時点を含む前後の所定時間にわたるその情報および心拍数に関する情報を記憶手段に記憶するように制御する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は車両制御システムに係り、特に車両の走行制御に関わる情報を扱うとともに各種制御を行う複数の制御ユニットと、乗員の身体の情報を検知して扱う身体情報制御ユニットと、それらの各制御ユニットからの情報が載せられ相互に送信または受信を可能とする制御エリア通信手段とを有する車両制御システムに関するものである。
【背景技術】
【0002】
従来の車両または運転者の監視をする方策、つまり、車両制御システムとしては、心拍数を検出する心拍数検出装置や監視後の状態に応じて警報を発生させる警報装置、監視後の状態に応じて車速を制御する装置、監視後の状態に応じて車両制御とこの車両制御の際の送受信を行う装置などがある。
【0003】
【特許文献1】特開平7−85858号公報
【特許文献2】特開2000−340214号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところで、従来の車両制御システムにおいて、運転者監視のための心拍数などの身体情報は、専用の制御用コントローラである制御用ユニットに入力していたため、汎用性がなかった。
このため、例えば、エンジンコントローラであるエンジン制御ユニットに身体情報を入力した場合には、他のトランスミッションコントローラであるトランスミッション制御ユニットやトラクション制御用コントローラであるトラクション制御ユニットでは前記身体情報を使用することができず、もし使用する場合には、夫々の制御ユニットに入出力ポートを準備し、ハーネス等で接続しなくてはならなかったため、コストが大幅に増大して経済的に不利であるという不都合がある。
【0005】
また、居眠り状態や疲労状態、緊張状態などの運転者の状態に応じて、車両の運動特性を制御する方策が提案されている。
しかし、例えば、操舵角センサやスロットル開度センサ、ブレーキスイッチ、車速センサ、ハンドル圧力センサ、電磁アクチュエータ駆動回路、ブザー、心拍数入力などを1つの制御ユニットに入力して制御を行っているため、車両全てのエンジン情報やナビゲーション情報、エアバッグ情報、トランスミッション情報、車両スタビリティ(ブレーキや車輪など)情報、ボディ情報、エアコン情報など多くの情報を使用した精度の高い警報判断と車両制御とを実施することができないという不都合がある。
【0006】
更に、通路のカーブや交差点が近づいている時に車速が早過ぎる場合の警報発生や車両制御を行う場合に、ナビゲーションシステムからの情報を使用する方法は見られず、別の障害物検出センサを取り付けて情報を入力して制御するものが提案されているが、センサや信号の入出力のためにコストがかかってしまい、経済的に不利であるという不都合がある。
【0007】
更にまた、最悪の場合としては、事故などのイベントが発生してしまった時に、イベント原因の究明が運転操作ミスなのか、スピード超過によるものなのか、あるいは運転者の心臓発作などの身体的な原因だったのかが分からず、またイベント発生までの車両の挙動、例えば道路に対して蛇行運転をしていたかなどが分からないという不都合がある。
【0008】
また、特殊な場合としては、レースやテストコースでの走行テストなどを行う場合に、運転者の健康状態の把握、例えば運転による心拍数上昇などを車両速度や車両加速度と関連付けて管理することが困難であるとともに、車両の位置情報と加速度情報と速度と心拍数と走行タイムとの関連評価ができないという不都合がある。
【0009】
この発明の目的は、記憶手段に記憶した情報によって、事故(「イベント」ともいう。)の原因、過程などの客観的な評価を可能とする車両制御システムを実現することにある。
【課題を解決するための手段】
【0010】
そこで、この発明は、上述不都合を除去するために、車両の走行制御に関わる情報を扱うとともに各種制御を行う複数の制御ユニットと、乗員の身体の情報を検知して扱う身体情報制御ユニットと、それらの各制御ユニットからの情報が載せられ相互に送信または受信を可能とする制御エリア通信手段とを有する車両制御システムにおいて、一の制御ユニットが車両の加速度情報と乗員拘束装置の作動情報とのうち1つ以上の情報を前記制御エリア通信手段に載せるように制御する一方、前記身体情報制御ユニットは心拍数に関する情報を前記制御エリア通信手段に載せるように制御し、この制御エリア通信手段に接続される不揮発性の記憶手段を前記車両制御システムに併設し、この車両制御システムが、所定の加速度情報と前記乗員拘束装置の作動情報とのうち1つ以上の情報が前記制御エリア通信手段に載せられた際には、載せられた時点を含む前後の所定時間にわたるその情報および心拍数に関する情報を記憶手段に記憶するように制御することを特徴とする。
【発明の効果】
【0011】
以上詳細に説明した如くこの本発明によれば、車両の走行制御に関わる情報を扱うとともに各種制御を行う複数の制御ユニットと、乗員の身体の情報を検知して扱う身体情報制御ユニットと、それらの各制御ユニットからの情報が載せられ相互に送信または受信を可能とする制御エリア通信手段とを有する車両制御システムにおいて、一の制御ユニットが車両の加速度情報と乗員拘束装置の作動情報とのうち1つ以上の情報を制御エリア通信手段に載せるように制御する一方、身体情報制御ユニットは心拍数に関する情報を制御エリア通信手段に載せるように制御し、制御エリア通信手段に接続される不揮発性の記憶手段を車両制御システムに併設し、車両制御システムが、所定の加速度情報と乗員拘束装置の作動情報とのうち1つ以上の情報が制御エリア通信手段に載せられた際には、載せられた時点を含む前後の所定時間にわたるその情報および心拍数に関する情報を記憶手段に記憶するように制御する。
従って、事故(「イベント」ともいう。)の原因、過程などについて、第三者による客観的な評価を可能とする。
【発明を実施するための最良の形態】
【0012】
以下図面に基づいてこの発明の実施例を詳細に説明する。
【実施例】
【0013】
図1〜図10はこの発明の実施例を示すものである。
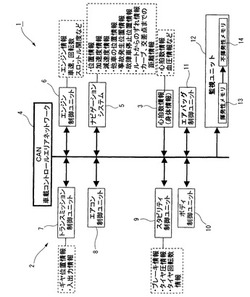
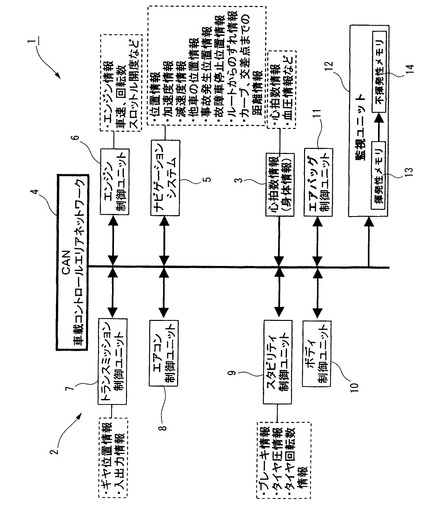
図1において、1は車両制御システムである。
この車両制御システム1は、車両の走行制御に関わる情報を扱うとともに各種制御を行う複数の制御ユニット2と、乗員の身体の情報を検知して扱う身体情報制御ユニット3と、それらの各制御ユニットからの情報が載せられ相互に送信または受信を可能とする制御エリア通信手段4と、ナビゲーションシステム5とを有する。
【0014】
このとき、前記複数の制御ユニット2としては、エンジン制御ユニット6やトランスミッション制御ユニット7、エアコン制御ユニット8、スタビリティ制御ユニット9、ボディ制御ユニット10、乗員拘束装置を制御するエアバッグ制御ユニット11が考えられる。
そして、前記エンジン制御ユニット6は、前記制御エリア通信手段4に載せられた情報に基づいてエンジン制御を行うユニットである。
また、前記トランスミッション制御ユニット7は、前記制御エリア通信手段4に載せられた情報に基づいてトランスミッション制御を行うユニットである。
前記エアコン制御ユニット8は、前記制御エリア通信手段4に載せられた情報に基づいてエアコン制御を行うユニットである。
前記スタビリティ制御ユニット9は、前記制御エリア通信手段4に載せられた情報に基づいてスタビリティ制御を行うユニットである。
つまり、スタビリティ制御ユニット9は、車両の旋回時に不安定な状態(例えば、オーバステアやアンダステア)に陥った場合に、状況に応じてエンジントルクを制限したり、目標車輪にポンプモータ(図示せず)で発生させたブレーキ油圧を作用(「アクティブブレーキ」ともいう。)させる制御を行うものである。
これにより、旋回時の安定性を補助している。
前記ボディ制御ユニット10は、図示しないパワーウィンドウに駆動要求を出し、図示しないリヤウィンドウの開放制御などを行うユニットである。
これにより、車室内の空気の排出を可能としている。
前記エアバッグ制御ユニット11は、前記乗員拘束装置を制御するユニットであり、乗員拘束装置の作動状況の把握が可能である。
【0015】
また、前記身体情報制御ユニット3は、心拍数情報や血圧情報などの乗員の身体の情報を入力するユニットである。
これにより、運転者の健康状態の把握が可能である。
【0016】
更に、前記制御エリア通信手段4は、CAN(「車載コントロールエリアネットワーク」、「controller area network」ともいう。)からなる。
この制御エリア通信手段4には、前記車両制御システム1の複数の制御ユニット2や身体情報制御ユニット3、ナビゲーションシステム5などからの情報が載せられ、相互に送信または受信を可能としている。
つまり、車両監視を行うために、前記制御エリア通信手段4に載せられる情報としては、前記複数の制御ユニット2の前記エンジン制御ユニット6からのエンジン情報、車速、回転数、スロットル開度などがあるとともに、前記トランスミッション制御ユニット7からのギヤ位置、例えば変速位置情報や入出力情報や、前記スタビリティ制御ユニット9からのブレーキ情報、タイヤ圧情報、タイヤ回転数情報、前記エアコン制御ユニット8からのエアコンの作動情報、前記ボディ制御ユニット10からのボディ情報、前記エアバッグ制御ユニット11からの乗員拘束装置の作動情報などがある。
また、前記制御エリア通信手段4には、前記身体情報制御ユニット3からの心拍数情報や血圧情報なども載せられる。
更に、前記制御エリア通信手段4には、前記ナビゲーションシステム5から以下の如き情報も載せられる。
(1)位置情報
(2)加速度情報
(3)減速度情報
(4)他車の位置情報
(5)イベント(「事故」とも換言できる。)発生位置情報
(6)故障車停止位置情報
(7)ルートからのずれ情報
(8)カーブ、交差点までの距離情報
【0017】
そして、前記車両制御システム1は、制御エリア通信手段4に載せた情報を使用してエンジン制御やトランスミッション制御、スタビリティ制御、エアコン制御を行う。
これにより、精度の高い制御を実現している。
また、前記車両制御システム1は、制御エリア通信手段4に載せたナビゲーションシステム5から得られる位置情報や加速度情報、他車の位置情報、イベント発生位置情報、ルートからのずれ情報、カーブ、交差点までの距離情報などを使用して警報発生や車両制御を行い、イベント監視と運転監視とを行う。
これにより、前記ナビゲーションシステム5から得られる情報に対して、迅速かつ確実な制御を行うことができる。
【0018】
このとき、一の制御ユニットが車両の加速度情報と乗員拘束装置の作動情報とのうち1つ以上の情報を前記制御エリア通信手段4に載せるように制御する一方、前記身体情報制御ユニット3は心拍数に関する情報を前記制御エリア通信手段4に載せるように制御し、この制御エリア通信手段4に接続される不揮発性の記憶手段12を前記車両制御システム1に併設し、この車両制御システム1が、所定の加速度情報と前記乗員拘束装置の作動情報とのうち1つ以上の情報が前記制御エリア通信手段4に載せられた際には、載せられた時点を含む前後の所定時間にわたるその情報および心拍数に関する情報を前記記憶手段12に記憶するように制御するものである。
詳述すれば、前記記憶手段(「監視ユニット」ともいう。)12は、図1に示す如く、監視ユニットと称することのできるものであり、揮発性メモリ13と、この揮発性メモリ13に接続する不揮発性メモリ14とを有する。
そして、前記ナビゲーションシステム5からの加速度情報や前記エアバッグ制御ユニット11からの乗員拘束装置の作動情報とのうち1つ以上の情報が前記制御エリア通信手段4に載せられた際に、この情報をイベント発生トリガとし、載せられた時点を含む前後の所定時間にわたるその情報、例えば、前記ナビゲーションシステム5からの各種情報および前記身体情報制御ユニット3からの心拍数情報などの乗員の身体の情報を、前記記憶手段12の不揮発性メモリ14に記憶するものである。
これにより、イベント原因の解析を容易とし、第三者による客観的な評価を可能としている。
【0019】
また、前記車両制御システム1は、スタビリティ制御ユニットとして前記スタビリティ制御ユニット9を備えるとともに、走行路に関する情報を前記制御エリア通信手段4に載せる一の制御ユニットである前記ナビゲーションシステム5を備えている。
そして、前記スタビリティ制御ユニット9は、前記制御エリア通信手段4を介して得られる心拍数に関する情報が予め設定した条件より外れる場合には、車両のスタビリティを向上するようにスタビリティ制御を行う一方、前記制御エリア通信手段4を介して得られる走行路に関する情報が予め設定した条件より外れる場合には、車両のスタビリティを向上するようにスタビリティ制御を行い、前記車両制御システム1が、所定の加速度情報と乗員拘束装置の作動情報とのうち、1つ以上の情報が前記制御エリア通信手段4に載せられた際には、載せられた時点を含む前後の所定時間にわたるその情報およびそれまでの運転者の心拍数の最大値と最小値とに関する情報を前記記憶手段12に記憶するように制御する。
つまり、前記車両制御システム1は、上述した車両監視やイベント監視、運転監視以外にも、前記身体情報制御ユニット3からの心拍数情報や血圧情報などによって運転者監視をも行うものである。
これにより、運転者の身体の状態を把握して、車両の走行を補助することができるだけでなく、運転者が健常な状態でも車両の走行を補助することができる。
【0020】
このとき、前記記憶手段12の不揮発性メモリ14には、上記情報に加え、前記ナビゲーションシステム5からの車両位置情報や前記エンジン制御ユニット6からのエンジン回転速度情報及び車両速度情報、前記トランスミッション制御ユニット7からの変速位置情報、前記スタビリティ制御ユニット9からのブレーキ情報及びタイヤ回転数情報のうち1つ以上を含み、それらの情報が走行タイムに関連付けて記憶される。
これにより、自立制御している各制御装置の関連付けを済ませ、評価作業を容易なものとする。
【0021】
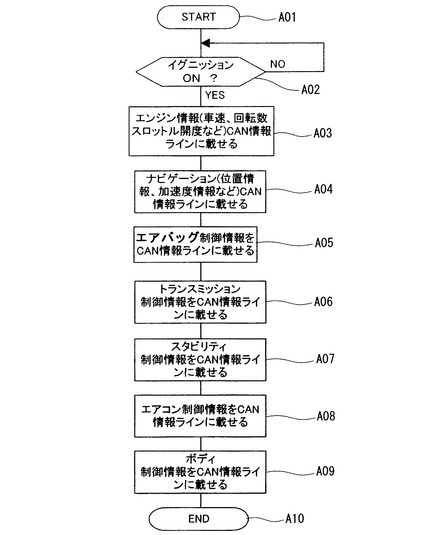
次に、図2の前記車両制御システム1の車両監視用フローチャートに沿って作用を説明する。
【0022】
前記車両制御システム1の車両監視用プログラムがスタート(A01)すると、イグニッションスイッチがONであるか否かの判断(A02)に移行する。
この判断(A02)がNOの場合には、判断(A02)がYESとなるまで、この判断(A02)を繰り返し行う。
また、判断(A02)がYESの場合には、車速や回転数、スロットル開度などのエンジン情報を前記エンジン制御ユニット6から前記制御エリア通信手段4に載せる処理(A03)に移行する。
そして、この処理(A03)の後には、位置情報や加速度情報などのナビゲーション情報を前記ナビゲーションシステム5から前記制御エリア通信手段4に載せる処理(A04)に移行し、その後に、エアバッグ制御情報である乗員拘束装置の作動情報を前記エアバッグ制御ユニット11から前記制御エリア通信手段4に載せる処理(A05)に移行する。
更に、前記エアバッグ制御ユニット11から前記制御エリア通信手段4に載せる処理(A05)の後には、トランスミッション制御情報を前記トランスミッション制御ユニット7から前記制御エリア通信手段4に載せる処理(A06)に移行し、その後に、スタビリティ制御情報を前記スタビリティ制御ユニット9から前記制御エリア通信手段4に載せる処理(A07)に移行する。
更にまた、スタビリティ制御情報を前記スタビリティ制御ユニット9から前記制御エリア通信手段4に載せる処理(A07)の後には、エアコン制御情報を前記エアコン制御ユニット8から前記制御エリア通信手段4に載せる処理(A07)に移行し、その後に、ボディ制御情報を前記ボディ制御ユニット10から前記制御エリア通信手段4に載せる処理(A08)に移行し、車両監視用プログラムのエンド(A09)に移行する。
【0023】
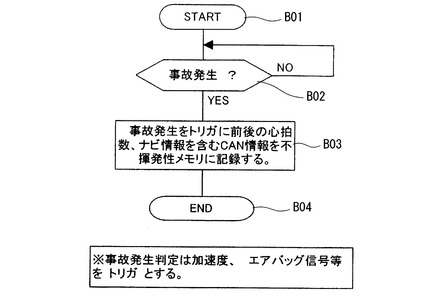
また、図3の前記車両制御システム1のイベント監視用フローチャートに沿って作用を説明する。
【0024】
前記車両制御システム1のイベント監視用プログラムがスタート(B01)すると、事故などのイベントが発生したか否かの判断(B02)に移行する。
そして、この判断(B02)がNOの場合には、判断(B02)がYESとなるまで、この判断(B02)を繰り返し行う。
また、判断(B02)がYESの場合には、CAN情報を前記不揮発性メモリ14に記憶する処理(B03)に移行する。
つまり、この処理(B03)においては、上述の判断(B02)がYESとなってイベントが発生した情報をイベント発生トリガとし、前記制御エリア通信手段4に載せられた時点を含む前後の所定時間にわたるその情報、例えば、前記ナビゲーションシステム5からの各種情報および前記身体情報制御ユニット3からの心拍数情報などの乗員の身体の情報を、前記記憶手段12の不揮発性メモリ14に記憶する。
そして、処理(B03)の後には、イベント監視用プログラムのエンド(B04)に移行する。
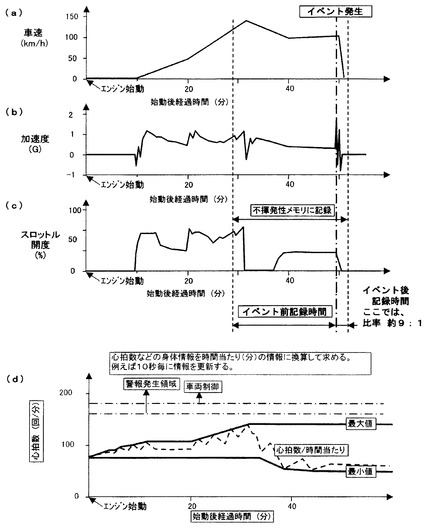
追記すれば、例えば、第1案〜第3案までの車両監視の際には、図8(a)〜(c)に示す如く、始動後経過時間毎の車速や加速度、スロットル開度を検出し、イベントが発生した際に、前記制御エリア通信手段4に載せられた時点を含む前後の所定時間、例えばイベント前記録時間とイベント後記録時間との比率が「9:1」となるように、前記ナビゲーションシステム5からの各種情報および前記身体情報制御ユニット3からの心拍数情報などの乗員の身体の情報を、前記記憶手段12の不揮発性メモリ14に記憶するものである。
【0025】
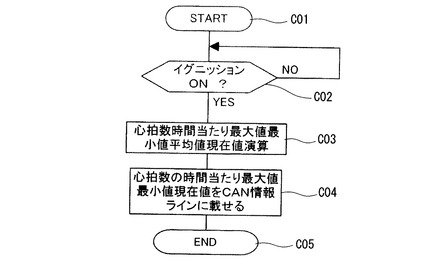
更に、図4の前記車両制御システム1の第1案の運転者監視用フローチャートに沿って作用を説明する。
【0026】
前記車両制御システム1の第1案の運転者監視用プログラムがスタート(C01)すると、イグニッションスイッチがONであるか否かの判断(C02)に移行する。
この判断(C02)がNOの場合には、判断(C02)がYESとなるまで、この判断(C02)を繰り返し行う。
また、イグニッションスイッチがONであるか否かの判断(C02)がYESの場合には、心拍数の演算の処理(C03)に移行する。
この心拍数の演算の処理(C03)においては、心拍数の時間当たりの最大値や最小値、平均値、現在値を演算する。
そして、心拍数の演算の処理(C03)の後には、心拍数を前記制御エリア通信手段4に載せる処理(C04)に移行する。
この心拍数の情報を前記制御エリア通信手段4に載せる処理(C04)は、心拍数の時間当たりの最大値や最小値、平均値、現在値をCAN情報ラインである前記制御エリア通信手段4に載せる処理である。
更に、心拍数の情報を前記制御エリア通信手段4に載せる処理(C04)の後には、第1案の運転者監視用プログラムのエンド(C05)に移行する。
【0027】
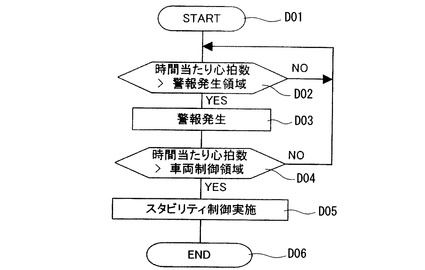
更にまた、図5の前記車両制御システム1の第2案の運転者監視用フローチャートに沿って作用を説明する。
【0028】
前記車両制御システム1の第2案の運転者監視用プログラムがスタート(D01)すると、時間当たりの心拍数が警報発生領域に入ったか否かの判断(D02)に移行する。
このとき、この警報発生領域は、図8(d)に示す如く、心拍数の最大値よりも大なる値の領域に設定されている。
そして、時間当たりの心拍数が警報発生領域に入ったか否かの判断(D02)がNOの場合には、判断(D02)がYESとなるまで、この判断(D02)を繰り返し行う。
また、判断(D02)がYESの場合には、前記車両制御システム1によって警報を発生させる処理(D03)に移行する。
この前記車両制御システム1によって警報を発生させる処理(D03)の後には、時間当たりの心拍数が車両制御領域に入ったか否かの判断(D04)に移行する。
このとき、この車両制御領域は、図8(d)に示す如く、警報発生領域よりも大なる値の領域に設定されている。
また、心拍数などの身体情報を時間当たり(例えば「分」)の情報に換算して求めるため、例えば10秒毎に情報を更新する。
そして、時間当たりの心拍数が車両制御領域に入ったか否かの判断(D04)がNOの場合には、上述の時間当たりの心拍数が警報発生領域に入ったか否かの判断(D02)に戻る。
更に、判断(D04)がYESの場合には、前記スタビリティ制御ユニット9によってスタビリティ制御を実施する処理(D05)に移行し、その後に、第2案の運転者監視用プログラムのエンド(D06)に移行する。
追記すれば、前記スタビリティ制御ユニット9によるスタビリティ制御は、車両の旋回時に不安定な状態(例えば、オーバステアやアンダステア)に陥った場合に、状況に応じてエンジントルクを制限したり、目標車輪にポンプモータ(図示せず)で発生させたブレーキ油圧を作用(「アクティブブレーキ」ともいう。)させる制御であり、これによって旋回時の安定性を補助している。
【0029】
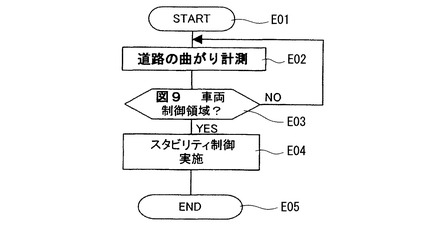
また、図6の前記車両制御システム1の第1案の運転監視用フローチャートに沿って作用を説明する。
【0030】
前記車両制御システム1の第1案の運転監視用プログラムがスタート(E01)すると、道路の曲がりを計測する処理(E02)に移行する。
この道路の曲がりを計測する処理(E02)は、前記ナビゲーションシステム5からの各種情報に基づいて計測する。
そして、道路の曲がりを計測する処理(E02)の後には、車両制御領域であるか否かの判断(E03)に移行する。
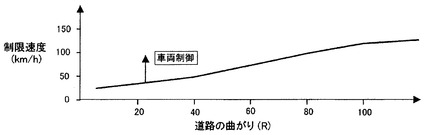
この車両制御領域であるか否かの判断(E03)は、図9に示す如く、制限速度と道路の曲がりとによって予め設定したマップにより、車両制御領域であるか否かを判断する。
上述の車両制御領域であるか否かの判断(E03)において、この判断(E03)がNOの場合には、判断(E03)がYESとなるまで、この判断(E03)を繰り返し行う。
また、車両制御領域であるか否かの判断(E03)がYESの場合には、前記スタビリティ制御ユニット9によってスタビリティ制御を実施する処理(E04)に移行し、その後に、第1案の運転監視用プログラムのエンド(E05)に移行する。
【0031】
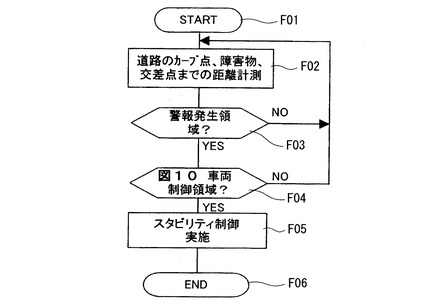
更に、図7の前記車両制御システム1の第2案の運転監視用フローチャートに沿って作用を説明する。
【0032】
前記車両制御システム1の第2案の運転監視用プログラムがスタート(F01)すると、道路のカーブ点、障害物、交差点までの距離を計測する処理(F02)に移行する。
この道路のカーブ点、障害物、交差点までの距離を計測する処理(F02)は、前記ナビゲーションシステム5からの各種情報に基づいて計測する。
そして、道路のカーブ点、障害物、交差点までの距離を計測する処理(F02)の後には、警報発生領域であるか否かの判断(F03)に移行する。
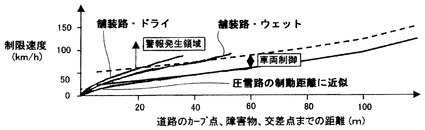
この警報発生領域であるか否かの判断(F03)は、図10に示す如く、制限速度と道路のカーブ点、障害物、交差点までの距離とによって予め設定したマップにより、警報発生領域であるか否かを判断する。
上述の警報発生領域であるか否かの判断(F03)において、この判断(F03)がNOの場合には、道路のカーブ点、障害物、交差点までの距離を計測する処理(F02)に戻り、判断(F03)がYESの場合には、車両制御領域であるか否かの判断(F04)に移行する。
この車両制御領域であるか否かの判断(F04)は、図10に示す如く、制限速度と道路のカーブ点、障害物、交差点までの距離とによって予め設定したマップにより、車両制御領域であるか否かを判断する。
上述の車両制御領域であるか否かの判断(F04)において、この判断(F04)がNOの場合には、道路のカーブ点、障害物、交差点までの距離を計測する処理(F02)に戻り、判断(F04)がYESの場合には、前記スタビリティ制御ユニット9によってスタビリティ制御を実施する処理(F05)に移行し、その後に、第2案の運転監視用プログラムのエンド(F06)に移行する。
追記すれば、上述した図10の制限速度と道路のカーブ点、障害物、交差点までの距離とによって予め設定したマップにおいて、一般的な道路のみでなく、以下のような場合を勘案した設定とすることも可能である。
(1)舗装路・ドライ
(2)舗装路・ウェット
(3)圧雪路の制動距離に近似
【0033】
これにより、車両の走行制御に関わる情報を扱うとともに各種制御を行う複数の制御ユニット2と、乗員の身体の情報を検知して扱う身体情報制御ユニット3と、それらの各制御ユニットからの情報が載せられ相互に送信または受信を可能とする制御エリア通信手段4とを有する車両制御システム1において、一の制御ユニットが車両の加速度情報と乗員拘束装置の作動情報とのうち1つ以上の情報を前記制御エリア通信手段4に載せるように制御する一方、前記身体情報制御ユニット3は心拍数に関する情報を前記制御エリア通信手段4に載せるように制御し、この制御エリア通信手段4に接続される不揮発性の記憶手段12を前記車両制御システム1に併設し、この車両制御システム1が、所定の加速度情報と前記乗員拘束装置の作動情報とのうち1つ以上の情報が前記制御エリア通信手段4に載せられた際には、載せられた時点を含む前後の所定時間にわたるその情報および心拍数に関する情報を記憶手段12に記憶するように制御する。
従って、事故(「イベント」ともいう。)の原因、過程などについて、第三者による客観的な評価を可能とする。
【0034】
また、別の一の制御ユニットをスタビリティ制御ユニット9として備え、さらに別な走行路に関する情報を制御エリア通信手段4に載せる一の制御ユニットを備え、前記スタビリティ制御ユニット9は、前記制御エリア通信手段を介して得られる心拍数に関する情報が予め設定した条件より外れる場合には、車両のスタビリティを向上するようにスタビリティ制御を行う一方、前記制御エリア通信手段4を介して得られる走行路に関する情報が予め設定した条件より外れる場合には、車両のスタビリティを向上するようにスタビリティ制御を行い、車両制御システム1が、所定の加速度情報と乗員拘束装置の作動情報とのうち、1つ以上の情報が前記制御エリア通信手段4に載せられた際には、載せられた時点を含む前後の所定時間にわたるその情報およびそれまでの運転者の心拍数の最大値と最小値とに関する情報を記憶手段12に記憶するように制御する。
従って、運転者の身体の状態を把握して、車両の走行を補助することができるだけでなく、運転者が健常な状態でも車両の走行を補助することができ、商品性を向上できる。
【0035】
更に、前記記憶手段12には、上記情報に加え、車両位置情報、エンジン回転速度情報、車両速度情報、変速位置情報、ブレーキ情報、タイヤ回転数情報のうち1つ以上のを含み、それらの情報が走行タイムに関連付けて記憶される。
従って、自立制御している各制御装置の関連付けを済ませ、評価作業を容易なものとすることができる。
【0036】
更にまた、レースやテストコースでの走行テストなどを行う場合には、前記車両制御システム1によって、心拍数の増減などの運転者の健康状態の把握を車両の速度や加速度と関連付けて処理することが可能であり、運転者の健康状態の管理を行うことができる。
【図面の簡単な説明】
【0037】
【図1】この発明の実施例を示す車両制御システムのシステム構成図である。
【図2】車両制御システムの車両監視用フローチャートである。
【図3】車両制御システムのイベント監視用フローチャートである。
【図4】車両制御システムの第1案の運転者監視用フローチャートである。
【図5】車両制御システムの第2案の運転者監視用フローチャートである。
【図6】車両制御システムの第1案の運転監視用フローチャートである。
【図7】車両制御システムの第2案の運転監視用フローチャートである。
【図8】車両制御システムの車両監視用タイムチャート及び運転者監視用関係図を示し、(a)は第1案の車両監視用車速のタイムチャート、(b)は第2案の車両監視用加速度のタイムチャート、(c)は第3案の車両監視用スロットル開度のタイムチャート、(d)は運転者監視用の心拍数と始動後経過時間との関係を示す図である。
【図9】車両制御システムの第1案の運転監視用の制限速度と道路の曲がりとの関係を示す図である。
【図10】車両制御システムの第2案の運転監視用の制限速度と道路のカーブ点、障害物、交差点までの距離との関係を示す図である。
【符号の説明】
【0038】
1 車両制御システム
2 複数の制御ユニット
3 身体情報制御ユニット
4 制御エリア通信手段
5 ナビゲーションシステム
6 エンジン制御ユニット
7 トランスミッション制御ユニット
8 エアコン制御ユニット
9 スタビリティ制御ユニット
10 ボディ制御ユニット
11 エアバッグ制御ユニット
12 記憶手段(「監視ユニット」ともいう。)
13 揮発性メモリ
14 不揮発性メモリ
【技術分野】
【0001】
この発明は車両制御システムに係り、特に車両の走行制御に関わる情報を扱うとともに各種制御を行う複数の制御ユニットと、乗員の身体の情報を検知して扱う身体情報制御ユニットと、それらの各制御ユニットからの情報が載せられ相互に送信または受信を可能とする制御エリア通信手段とを有する車両制御システムに関するものである。
【背景技術】
【0002】
従来の車両または運転者の監視をする方策、つまり、車両制御システムとしては、心拍数を検出する心拍数検出装置や監視後の状態に応じて警報を発生させる警報装置、監視後の状態に応じて車速を制御する装置、監視後の状態に応じて車両制御とこの車両制御の際の送受信を行う装置などがある。
【0003】
【特許文献1】特開平7−85858号公報
【特許文献2】特開2000−340214号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところで、従来の車両制御システムにおいて、運転者監視のための心拍数などの身体情報は、専用の制御用コントローラである制御用ユニットに入力していたため、汎用性がなかった。
このため、例えば、エンジンコントローラであるエンジン制御ユニットに身体情報を入力した場合には、他のトランスミッションコントローラであるトランスミッション制御ユニットやトラクション制御用コントローラであるトラクション制御ユニットでは前記身体情報を使用することができず、もし使用する場合には、夫々の制御ユニットに入出力ポートを準備し、ハーネス等で接続しなくてはならなかったため、コストが大幅に増大して経済的に不利であるという不都合がある。
【0005】
また、居眠り状態や疲労状態、緊張状態などの運転者の状態に応じて、車両の運動特性を制御する方策が提案されている。
しかし、例えば、操舵角センサやスロットル開度センサ、ブレーキスイッチ、車速センサ、ハンドル圧力センサ、電磁アクチュエータ駆動回路、ブザー、心拍数入力などを1つの制御ユニットに入力して制御を行っているため、車両全てのエンジン情報やナビゲーション情報、エアバッグ情報、トランスミッション情報、車両スタビリティ(ブレーキや車輪など)情報、ボディ情報、エアコン情報など多くの情報を使用した精度の高い警報判断と車両制御とを実施することができないという不都合がある。
【0006】
更に、通路のカーブや交差点が近づいている時に車速が早過ぎる場合の警報発生や車両制御を行う場合に、ナビゲーションシステムからの情報を使用する方法は見られず、別の障害物検出センサを取り付けて情報を入力して制御するものが提案されているが、センサや信号の入出力のためにコストがかかってしまい、経済的に不利であるという不都合がある。
【0007】
更にまた、最悪の場合としては、事故などのイベントが発生してしまった時に、イベント原因の究明が運転操作ミスなのか、スピード超過によるものなのか、あるいは運転者の心臓発作などの身体的な原因だったのかが分からず、またイベント発生までの車両の挙動、例えば道路に対して蛇行運転をしていたかなどが分からないという不都合がある。
【0008】
また、特殊な場合としては、レースやテストコースでの走行テストなどを行う場合に、運転者の健康状態の把握、例えば運転による心拍数上昇などを車両速度や車両加速度と関連付けて管理することが困難であるとともに、車両の位置情報と加速度情報と速度と心拍数と走行タイムとの関連評価ができないという不都合がある。
【0009】
この発明の目的は、記憶手段に記憶した情報によって、事故(「イベント」ともいう。)の原因、過程などの客観的な評価を可能とする車両制御システムを実現することにある。
【課題を解決するための手段】
【0010】
そこで、この発明は、上述不都合を除去するために、車両の走行制御に関わる情報を扱うとともに各種制御を行う複数の制御ユニットと、乗員の身体の情報を検知して扱う身体情報制御ユニットと、それらの各制御ユニットからの情報が載せられ相互に送信または受信を可能とする制御エリア通信手段とを有する車両制御システムにおいて、一の制御ユニットが車両の加速度情報と乗員拘束装置の作動情報とのうち1つ以上の情報を前記制御エリア通信手段に載せるように制御する一方、前記身体情報制御ユニットは心拍数に関する情報を前記制御エリア通信手段に載せるように制御し、この制御エリア通信手段に接続される不揮発性の記憶手段を前記車両制御システムに併設し、この車両制御システムが、所定の加速度情報と前記乗員拘束装置の作動情報とのうち1つ以上の情報が前記制御エリア通信手段に載せられた際には、載せられた時点を含む前後の所定時間にわたるその情報および心拍数に関する情報を記憶手段に記憶するように制御することを特徴とする。
【発明の効果】
【0011】
以上詳細に説明した如くこの本発明によれば、車両の走行制御に関わる情報を扱うとともに各種制御を行う複数の制御ユニットと、乗員の身体の情報を検知して扱う身体情報制御ユニットと、それらの各制御ユニットからの情報が載せられ相互に送信または受信を可能とする制御エリア通信手段とを有する車両制御システムにおいて、一の制御ユニットが車両の加速度情報と乗員拘束装置の作動情報とのうち1つ以上の情報を制御エリア通信手段に載せるように制御する一方、身体情報制御ユニットは心拍数に関する情報を制御エリア通信手段に載せるように制御し、制御エリア通信手段に接続される不揮発性の記憶手段を車両制御システムに併設し、車両制御システムが、所定の加速度情報と乗員拘束装置の作動情報とのうち1つ以上の情報が制御エリア通信手段に載せられた際には、載せられた時点を含む前後の所定時間にわたるその情報および心拍数に関する情報を記憶手段に記憶するように制御する。
従って、事故(「イベント」ともいう。)の原因、過程などについて、第三者による客観的な評価を可能とする。
【発明を実施するための最良の形態】
【0012】
以下図面に基づいてこの発明の実施例を詳細に説明する。
【実施例】
【0013】
図1〜図10はこの発明の実施例を示すものである。
図1において、1は車両制御システムである。
この車両制御システム1は、車両の走行制御に関わる情報を扱うとともに各種制御を行う複数の制御ユニット2と、乗員の身体の情報を検知して扱う身体情報制御ユニット3と、それらの各制御ユニットからの情報が載せられ相互に送信または受信を可能とする制御エリア通信手段4と、ナビゲーションシステム5とを有する。
【0014】
このとき、前記複数の制御ユニット2としては、エンジン制御ユニット6やトランスミッション制御ユニット7、エアコン制御ユニット8、スタビリティ制御ユニット9、ボディ制御ユニット10、乗員拘束装置を制御するエアバッグ制御ユニット11が考えられる。
そして、前記エンジン制御ユニット6は、前記制御エリア通信手段4に載せられた情報に基づいてエンジン制御を行うユニットである。
また、前記トランスミッション制御ユニット7は、前記制御エリア通信手段4に載せられた情報に基づいてトランスミッション制御を行うユニットである。
前記エアコン制御ユニット8は、前記制御エリア通信手段4に載せられた情報に基づいてエアコン制御を行うユニットである。
前記スタビリティ制御ユニット9は、前記制御エリア通信手段4に載せられた情報に基づいてスタビリティ制御を行うユニットである。
つまり、スタビリティ制御ユニット9は、車両の旋回時に不安定な状態(例えば、オーバステアやアンダステア)に陥った場合に、状況に応じてエンジントルクを制限したり、目標車輪にポンプモータ(図示せず)で発生させたブレーキ油圧を作用(「アクティブブレーキ」ともいう。)させる制御を行うものである。
これにより、旋回時の安定性を補助している。
前記ボディ制御ユニット10は、図示しないパワーウィンドウに駆動要求を出し、図示しないリヤウィンドウの開放制御などを行うユニットである。
これにより、車室内の空気の排出を可能としている。
前記エアバッグ制御ユニット11は、前記乗員拘束装置を制御するユニットであり、乗員拘束装置の作動状況の把握が可能である。
【0015】
また、前記身体情報制御ユニット3は、心拍数情報や血圧情報などの乗員の身体の情報を入力するユニットである。
これにより、運転者の健康状態の把握が可能である。
【0016】
更に、前記制御エリア通信手段4は、CAN(「車載コントロールエリアネットワーク」、「controller area network」ともいう。)からなる。
この制御エリア通信手段4には、前記車両制御システム1の複数の制御ユニット2や身体情報制御ユニット3、ナビゲーションシステム5などからの情報が載せられ、相互に送信または受信を可能としている。
つまり、車両監視を行うために、前記制御エリア通信手段4に載せられる情報としては、前記複数の制御ユニット2の前記エンジン制御ユニット6からのエンジン情報、車速、回転数、スロットル開度などがあるとともに、前記トランスミッション制御ユニット7からのギヤ位置、例えば変速位置情報や入出力情報や、前記スタビリティ制御ユニット9からのブレーキ情報、タイヤ圧情報、タイヤ回転数情報、前記エアコン制御ユニット8からのエアコンの作動情報、前記ボディ制御ユニット10からのボディ情報、前記エアバッグ制御ユニット11からの乗員拘束装置の作動情報などがある。
また、前記制御エリア通信手段4には、前記身体情報制御ユニット3からの心拍数情報や血圧情報なども載せられる。
更に、前記制御エリア通信手段4には、前記ナビゲーションシステム5から以下の如き情報も載せられる。
(1)位置情報
(2)加速度情報
(3)減速度情報
(4)他車の位置情報
(5)イベント(「事故」とも換言できる。)発生位置情報
(6)故障車停止位置情報
(7)ルートからのずれ情報
(8)カーブ、交差点までの距離情報
【0017】
そして、前記車両制御システム1は、制御エリア通信手段4に載せた情報を使用してエンジン制御やトランスミッション制御、スタビリティ制御、エアコン制御を行う。
これにより、精度の高い制御を実現している。
また、前記車両制御システム1は、制御エリア通信手段4に載せたナビゲーションシステム5から得られる位置情報や加速度情報、他車の位置情報、イベント発生位置情報、ルートからのずれ情報、カーブ、交差点までの距離情報などを使用して警報発生や車両制御を行い、イベント監視と運転監視とを行う。
これにより、前記ナビゲーションシステム5から得られる情報に対して、迅速かつ確実な制御を行うことができる。
【0018】
このとき、一の制御ユニットが車両の加速度情報と乗員拘束装置の作動情報とのうち1つ以上の情報を前記制御エリア通信手段4に載せるように制御する一方、前記身体情報制御ユニット3は心拍数に関する情報を前記制御エリア通信手段4に載せるように制御し、この制御エリア通信手段4に接続される不揮発性の記憶手段12を前記車両制御システム1に併設し、この車両制御システム1が、所定の加速度情報と前記乗員拘束装置の作動情報とのうち1つ以上の情報が前記制御エリア通信手段4に載せられた際には、載せられた時点を含む前後の所定時間にわたるその情報および心拍数に関する情報を前記記憶手段12に記憶するように制御するものである。
詳述すれば、前記記憶手段(「監視ユニット」ともいう。)12は、図1に示す如く、監視ユニットと称することのできるものであり、揮発性メモリ13と、この揮発性メモリ13に接続する不揮発性メモリ14とを有する。
そして、前記ナビゲーションシステム5からの加速度情報や前記エアバッグ制御ユニット11からの乗員拘束装置の作動情報とのうち1つ以上の情報が前記制御エリア通信手段4に載せられた際に、この情報をイベント発生トリガとし、載せられた時点を含む前後の所定時間にわたるその情報、例えば、前記ナビゲーションシステム5からの各種情報および前記身体情報制御ユニット3からの心拍数情報などの乗員の身体の情報を、前記記憶手段12の不揮発性メモリ14に記憶するものである。
これにより、イベント原因の解析を容易とし、第三者による客観的な評価を可能としている。
【0019】
また、前記車両制御システム1は、スタビリティ制御ユニットとして前記スタビリティ制御ユニット9を備えるとともに、走行路に関する情報を前記制御エリア通信手段4に載せる一の制御ユニットである前記ナビゲーションシステム5を備えている。
そして、前記スタビリティ制御ユニット9は、前記制御エリア通信手段4を介して得られる心拍数に関する情報が予め設定した条件より外れる場合には、車両のスタビリティを向上するようにスタビリティ制御を行う一方、前記制御エリア通信手段4を介して得られる走行路に関する情報が予め設定した条件より外れる場合には、車両のスタビリティを向上するようにスタビリティ制御を行い、前記車両制御システム1が、所定の加速度情報と乗員拘束装置の作動情報とのうち、1つ以上の情報が前記制御エリア通信手段4に載せられた際には、載せられた時点を含む前後の所定時間にわたるその情報およびそれまでの運転者の心拍数の最大値と最小値とに関する情報を前記記憶手段12に記憶するように制御する。
つまり、前記車両制御システム1は、上述した車両監視やイベント監視、運転監視以外にも、前記身体情報制御ユニット3からの心拍数情報や血圧情報などによって運転者監視をも行うものである。
これにより、運転者の身体の状態を把握して、車両の走行を補助することができるだけでなく、運転者が健常な状態でも車両の走行を補助することができる。
【0020】
このとき、前記記憶手段12の不揮発性メモリ14には、上記情報に加え、前記ナビゲーションシステム5からの車両位置情報や前記エンジン制御ユニット6からのエンジン回転速度情報及び車両速度情報、前記トランスミッション制御ユニット7からの変速位置情報、前記スタビリティ制御ユニット9からのブレーキ情報及びタイヤ回転数情報のうち1つ以上を含み、それらの情報が走行タイムに関連付けて記憶される。
これにより、自立制御している各制御装置の関連付けを済ませ、評価作業を容易なものとする。
【0021】
次に、図2の前記車両制御システム1の車両監視用フローチャートに沿って作用を説明する。
【0022】
前記車両制御システム1の車両監視用プログラムがスタート(A01)すると、イグニッションスイッチがONであるか否かの判断(A02)に移行する。
この判断(A02)がNOの場合には、判断(A02)がYESとなるまで、この判断(A02)を繰り返し行う。
また、判断(A02)がYESの場合には、車速や回転数、スロットル開度などのエンジン情報を前記エンジン制御ユニット6から前記制御エリア通信手段4に載せる処理(A03)に移行する。
そして、この処理(A03)の後には、位置情報や加速度情報などのナビゲーション情報を前記ナビゲーションシステム5から前記制御エリア通信手段4に載せる処理(A04)に移行し、その後に、エアバッグ制御情報である乗員拘束装置の作動情報を前記エアバッグ制御ユニット11から前記制御エリア通信手段4に載せる処理(A05)に移行する。
更に、前記エアバッグ制御ユニット11から前記制御エリア通信手段4に載せる処理(A05)の後には、トランスミッション制御情報を前記トランスミッション制御ユニット7から前記制御エリア通信手段4に載せる処理(A06)に移行し、その後に、スタビリティ制御情報を前記スタビリティ制御ユニット9から前記制御エリア通信手段4に載せる処理(A07)に移行する。
更にまた、スタビリティ制御情報を前記スタビリティ制御ユニット9から前記制御エリア通信手段4に載せる処理(A07)の後には、エアコン制御情報を前記エアコン制御ユニット8から前記制御エリア通信手段4に載せる処理(A07)に移行し、その後に、ボディ制御情報を前記ボディ制御ユニット10から前記制御エリア通信手段4に載せる処理(A08)に移行し、車両監視用プログラムのエンド(A09)に移行する。
【0023】
また、図3の前記車両制御システム1のイベント監視用フローチャートに沿って作用を説明する。
【0024】
前記車両制御システム1のイベント監視用プログラムがスタート(B01)すると、事故などのイベントが発生したか否かの判断(B02)に移行する。
そして、この判断(B02)がNOの場合には、判断(B02)がYESとなるまで、この判断(B02)を繰り返し行う。
また、判断(B02)がYESの場合には、CAN情報を前記不揮発性メモリ14に記憶する処理(B03)に移行する。
つまり、この処理(B03)においては、上述の判断(B02)がYESとなってイベントが発生した情報をイベント発生トリガとし、前記制御エリア通信手段4に載せられた時点を含む前後の所定時間にわたるその情報、例えば、前記ナビゲーションシステム5からの各種情報および前記身体情報制御ユニット3からの心拍数情報などの乗員の身体の情報を、前記記憶手段12の不揮発性メモリ14に記憶する。
そして、処理(B03)の後には、イベント監視用プログラムのエンド(B04)に移行する。
追記すれば、例えば、第1案〜第3案までの車両監視の際には、図8(a)〜(c)に示す如く、始動後経過時間毎の車速や加速度、スロットル開度を検出し、イベントが発生した際に、前記制御エリア通信手段4に載せられた時点を含む前後の所定時間、例えばイベント前記録時間とイベント後記録時間との比率が「9:1」となるように、前記ナビゲーションシステム5からの各種情報および前記身体情報制御ユニット3からの心拍数情報などの乗員の身体の情報を、前記記憶手段12の不揮発性メモリ14に記憶するものである。
【0025】
更に、図4の前記車両制御システム1の第1案の運転者監視用フローチャートに沿って作用を説明する。
【0026】
前記車両制御システム1の第1案の運転者監視用プログラムがスタート(C01)すると、イグニッションスイッチがONであるか否かの判断(C02)に移行する。
この判断(C02)がNOの場合には、判断(C02)がYESとなるまで、この判断(C02)を繰り返し行う。
また、イグニッションスイッチがONであるか否かの判断(C02)がYESの場合には、心拍数の演算の処理(C03)に移行する。
この心拍数の演算の処理(C03)においては、心拍数の時間当たりの最大値や最小値、平均値、現在値を演算する。
そして、心拍数の演算の処理(C03)の後には、心拍数を前記制御エリア通信手段4に載せる処理(C04)に移行する。
この心拍数の情報を前記制御エリア通信手段4に載せる処理(C04)は、心拍数の時間当たりの最大値や最小値、平均値、現在値をCAN情報ラインである前記制御エリア通信手段4に載せる処理である。
更に、心拍数の情報を前記制御エリア通信手段4に載せる処理(C04)の後には、第1案の運転者監視用プログラムのエンド(C05)に移行する。
【0027】
更にまた、図5の前記車両制御システム1の第2案の運転者監視用フローチャートに沿って作用を説明する。
【0028】
前記車両制御システム1の第2案の運転者監視用プログラムがスタート(D01)すると、時間当たりの心拍数が警報発生領域に入ったか否かの判断(D02)に移行する。
このとき、この警報発生領域は、図8(d)に示す如く、心拍数の最大値よりも大なる値の領域に設定されている。
そして、時間当たりの心拍数が警報発生領域に入ったか否かの判断(D02)がNOの場合には、判断(D02)がYESとなるまで、この判断(D02)を繰り返し行う。
また、判断(D02)がYESの場合には、前記車両制御システム1によって警報を発生させる処理(D03)に移行する。
この前記車両制御システム1によって警報を発生させる処理(D03)の後には、時間当たりの心拍数が車両制御領域に入ったか否かの判断(D04)に移行する。
このとき、この車両制御領域は、図8(d)に示す如く、警報発生領域よりも大なる値の領域に設定されている。
また、心拍数などの身体情報を時間当たり(例えば「分」)の情報に換算して求めるため、例えば10秒毎に情報を更新する。
そして、時間当たりの心拍数が車両制御領域に入ったか否かの判断(D04)がNOの場合には、上述の時間当たりの心拍数が警報発生領域に入ったか否かの判断(D02)に戻る。
更に、判断(D04)がYESの場合には、前記スタビリティ制御ユニット9によってスタビリティ制御を実施する処理(D05)に移行し、その後に、第2案の運転者監視用プログラムのエンド(D06)に移行する。
追記すれば、前記スタビリティ制御ユニット9によるスタビリティ制御は、車両の旋回時に不安定な状態(例えば、オーバステアやアンダステア)に陥った場合に、状況に応じてエンジントルクを制限したり、目標車輪にポンプモータ(図示せず)で発生させたブレーキ油圧を作用(「アクティブブレーキ」ともいう。)させる制御であり、これによって旋回時の安定性を補助している。
【0029】
また、図6の前記車両制御システム1の第1案の運転監視用フローチャートに沿って作用を説明する。
【0030】
前記車両制御システム1の第1案の運転監視用プログラムがスタート(E01)すると、道路の曲がりを計測する処理(E02)に移行する。
この道路の曲がりを計測する処理(E02)は、前記ナビゲーションシステム5からの各種情報に基づいて計測する。
そして、道路の曲がりを計測する処理(E02)の後には、車両制御領域であるか否かの判断(E03)に移行する。
この車両制御領域であるか否かの判断(E03)は、図9に示す如く、制限速度と道路の曲がりとによって予め設定したマップにより、車両制御領域であるか否かを判断する。
上述の車両制御領域であるか否かの判断(E03)において、この判断(E03)がNOの場合には、判断(E03)がYESとなるまで、この判断(E03)を繰り返し行う。
また、車両制御領域であるか否かの判断(E03)がYESの場合には、前記スタビリティ制御ユニット9によってスタビリティ制御を実施する処理(E04)に移行し、その後に、第1案の運転監視用プログラムのエンド(E05)に移行する。
【0031】
更に、図7の前記車両制御システム1の第2案の運転監視用フローチャートに沿って作用を説明する。
【0032】
前記車両制御システム1の第2案の運転監視用プログラムがスタート(F01)すると、道路のカーブ点、障害物、交差点までの距離を計測する処理(F02)に移行する。
この道路のカーブ点、障害物、交差点までの距離を計測する処理(F02)は、前記ナビゲーションシステム5からの各種情報に基づいて計測する。
そして、道路のカーブ点、障害物、交差点までの距離を計測する処理(F02)の後には、警報発生領域であるか否かの判断(F03)に移行する。
この警報発生領域であるか否かの判断(F03)は、図10に示す如く、制限速度と道路のカーブ点、障害物、交差点までの距離とによって予め設定したマップにより、警報発生領域であるか否かを判断する。
上述の警報発生領域であるか否かの判断(F03)において、この判断(F03)がNOの場合には、道路のカーブ点、障害物、交差点までの距離を計測する処理(F02)に戻り、判断(F03)がYESの場合には、車両制御領域であるか否かの判断(F04)に移行する。
この車両制御領域であるか否かの判断(F04)は、図10に示す如く、制限速度と道路のカーブ点、障害物、交差点までの距離とによって予め設定したマップにより、車両制御領域であるか否かを判断する。
上述の車両制御領域であるか否かの判断(F04)において、この判断(F04)がNOの場合には、道路のカーブ点、障害物、交差点までの距離を計測する処理(F02)に戻り、判断(F04)がYESの場合には、前記スタビリティ制御ユニット9によってスタビリティ制御を実施する処理(F05)に移行し、その後に、第2案の運転監視用プログラムのエンド(F06)に移行する。
追記すれば、上述した図10の制限速度と道路のカーブ点、障害物、交差点までの距離とによって予め設定したマップにおいて、一般的な道路のみでなく、以下のような場合を勘案した設定とすることも可能である。
(1)舗装路・ドライ
(2)舗装路・ウェット
(3)圧雪路の制動距離に近似
【0033】
これにより、車両の走行制御に関わる情報を扱うとともに各種制御を行う複数の制御ユニット2と、乗員の身体の情報を検知して扱う身体情報制御ユニット3と、それらの各制御ユニットからの情報が載せられ相互に送信または受信を可能とする制御エリア通信手段4とを有する車両制御システム1において、一の制御ユニットが車両の加速度情報と乗員拘束装置の作動情報とのうち1つ以上の情報を前記制御エリア通信手段4に載せるように制御する一方、前記身体情報制御ユニット3は心拍数に関する情報を前記制御エリア通信手段4に載せるように制御し、この制御エリア通信手段4に接続される不揮発性の記憶手段12を前記車両制御システム1に併設し、この車両制御システム1が、所定の加速度情報と前記乗員拘束装置の作動情報とのうち1つ以上の情報が前記制御エリア通信手段4に載せられた際には、載せられた時点を含む前後の所定時間にわたるその情報および心拍数に関する情報を記憶手段12に記憶するように制御する。
従って、事故(「イベント」ともいう。)の原因、過程などについて、第三者による客観的な評価を可能とする。
【0034】
また、別の一の制御ユニットをスタビリティ制御ユニット9として備え、さらに別な走行路に関する情報を制御エリア通信手段4に載せる一の制御ユニットを備え、前記スタビリティ制御ユニット9は、前記制御エリア通信手段を介して得られる心拍数に関する情報が予め設定した条件より外れる場合には、車両のスタビリティを向上するようにスタビリティ制御を行う一方、前記制御エリア通信手段4を介して得られる走行路に関する情報が予め設定した条件より外れる場合には、車両のスタビリティを向上するようにスタビリティ制御を行い、車両制御システム1が、所定の加速度情報と乗員拘束装置の作動情報とのうち、1つ以上の情報が前記制御エリア通信手段4に載せられた際には、載せられた時点を含む前後の所定時間にわたるその情報およびそれまでの運転者の心拍数の最大値と最小値とに関する情報を記憶手段12に記憶するように制御する。
従って、運転者の身体の状態を把握して、車両の走行を補助することができるだけでなく、運転者が健常な状態でも車両の走行を補助することができ、商品性を向上できる。
【0035】
更に、前記記憶手段12には、上記情報に加え、車両位置情報、エンジン回転速度情報、車両速度情報、変速位置情報、ブレーキ情報、タイヤ回転数情報のうち1つ以上のを含み、それらの情報が走行タイムに関連付けて記憶される。
従って、自立制御している各制御装置の関連付けを済ませ、評価作業を容易なものとすることができる。
【0036】
更にまた、レースやテストコースでの走行テストなどを行う場合には、前記車両制御システム1によって、心拍数の増減などの運転者の健康状態の把握を車両の速度や加速度と関連付けて処理することが可能であり、運転者の健康状態の管理を行うことができる。
【図面の簡単な説明】
【0037】
【図1】この発明の実施例を示す車両制御システムのシステム構成図である。
【図2】車両制御システムの車両監視用フローチャートである。
【図3】車両制御システムのイベント監視用フローチャートである。
【図4】車両制御システムの第1案の運転者監視用フローチャートである。
【図5】車両制御システムの第2案の運転者監視用フローチャートである。
【図6】車両制御システムの第1案の運転監視用フローチャートである。
【図7】車両制御システムの第2案の運転監視用フローチャートである。
【図8】車両制御システムの車両監視用タイムチャート及び運転者監視用関係図を示し、(a)は第1案の車両監視用車速のタイムチャート、(b)は第2案の車両監視用加速度のタイムチャート、(c)は第3案の車両監視用スロットル開度のタイムチャート、(d)は運転者監視用の心拍数と始動後経過時間との関係を示す図である。
【図9】車両制御システムの第1案の運転監視用の制限速度と道路の曲がりとの関係を示す図である。
【図10】車両制御システムの第2案の運転監視用の制限速度と道路のカーブ点、障害物、交差点までの距離との関係を示す図である。
【符号の説明】
【0038】
1 車両制御システム
2 複数の制御ユニット
3 身体情報制御ユニット
4 制御エリア通信手段
5 ナビゲーションシステム
6 エンジン制御ユニット
7 トランスミッション制御ユニット
8 エアコン制御ユニット
9 スタビリティ制御ユニット
10 ボディ制御ユニット
11 エアバッグ制御ユニット
12 記憶手段(「監視ユニット」ともいう。)
13 揮発性メモリ
14 不揮発性メモリ
【特許請求の範囲】
【請求項1】
車両の走行制御に関わる情報を扱うとともに各種制御を行う複数の制御ユニットと、乗員の身体の情報を検知して扱う身体情報制御ユニットと、それらの各制御ユニットからの情報が載せられ相互に送信または受信を可能とする制御エリア通信手段とを有する車両制御システムにおいて、一の制御ユニットが車両の加速度情報と乗員拘束装置の作動情報とのうち1つ以上の情報を前記制御エリア通信手段に載せるように制御する一方、前記身体情報制御ユニットは心拍数に関する情報を前記制御エリア通信手段に載せるように制御し、この制御エリア通信手段に接続される不揮発性の記憶手段を前記車両制御システムに併設し、この車両制御システムが、所定の加速度情報と前記乗員拘束装置の作動情報とのうち1つ以上の情報が前記制御エリア通信手段に載せられた際には、載せられた時点を含む前後の所定時間にわたるその情報および心拍数に関する情報を記憶手段に記憶するように制御することを特徴とする車両制御システム。
【請求項2】
別の一の制御ユニットをスタビリティ制御ユニットとして備え、さらに別な走行路に関する情報を制御エリア通信手段に載せる一の制御ユニットを備え、前記スタビリティ制御ユニットは、前記制御エリア通信手段を介して得られる心拍数に関する情報が予め設定した条件より外れる場合には、車両のスタビリティを向上するようにスタビリティ制御を行う一方、前記制御エリア通信手段を介して得られる走行路に関する情報が予め設定した条件より外れる場合には、車両のスタビリティを向上するようにスタビリティ制御を行い、車両制御システムが、所定の加速度情報と乗員拘束装置の作動情報とのうち、1つ以上の情報が前記制御エリア通信手段に載せられた際には、載せられた時点を含む前後の所定時間にわたるその情報およびそれまでの運転者の心拍数の最大値と最小値とに関する情報を記憶手段に記憶するように制御することを特徴とする請求項1に記載の車両制御システム。
【請求項3】
前記記憶手段には、上記情報に加え、車両位置情報、エンジン回転速度情報、車両速度情報、変速位置情報、ブレーキ情報、タイヤ回転数情報のうち1つ以上を含み、それらの情報が走行タイムに関連付けて記憶されることを特徴とする請求項1または請求項2に記載の車両制御システム。
【請求項1】
車両の走行制御に関わる情報を扱うとともに各種制御を行う複数の制御ユニットと、乗員の身体の情報を検知して扱う身体情報制御ユニットと、それらの各制御ユニットからの情報が載せられ相互に送信または受信を可能とする制御エリア通信手段とを有する車両制御システムにおいて、一の制御ユニットが車両の加速度情報と乗員拘束装置の作動情報とのうち1つ以上の情報を前記制御エリア通信手段に載せるように制御する一方、前記身体情報制御ユニットは心拍数に関する情報を前記制御エリア通信手段に載せるように制御し、この制御エリア通信手段に接続される不揮発性の記憶手段を前記車両制御システムに併設し、この車両制御システムが、所定の加速度情報と前記乗員拘束装置の作動情報とのうち1つ以上の情報が前記制御エリア通信手段に載せられた際には、載せられた時点を含む前後の所定時間にわたるその情報および心拍数に関する情報を記憶手段に記憶するように制御することを特徴とする車両制御システム。
【請求項2】
別の一の制御ユニットをスタビリティ制御ユニットとして備え、さらに別な走行路に関する情報を制御エリア通信手段に載せる一の制御ユニットを備え、前記スタビリティ制御ユニットは、前記制御エリア通信手段を介して得られる心拍数に関する情報が予め設定した条件より外れる場合には、車両のスタビリティを向上するようにスタビリティ制御を行う一方、前記制御エリア通信手段を介して得られる走行路に関する情報が予め設定した条件より外れる場合には、車両のスタビリティを向上するようにスタビリティ制御を行い、車両制御システムが、所定の加速度情報と乗員拘束装置の作動情報とのうち、1つ以上の情報が前記制御エリア通信手段に載せられた際には、載せられた時点を含む前後の所定時間にわたるその情報およびそれまでの運転者の心拍数の最大値と最小値とに関する情報を記憶手段に記憶するように制御することを特徴とする請求項1に記載の車両制御システム。
【請求項3】
前記記憶手段には、上記情報に加え、車両位置情報、エンジン回転速度情報、車両速度情報、変速位置情報、ブレーキ情報、タイヤ回転数情報のうち1つ以上を含み、それらの情報が走行タイムに関連付けて記憶されることを特徴とする請求項1または請求項2に記載の車両制御システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2008−225827(P2008−225827A)
【公開日】平成20年9月25日(2008.9.25)
【国際特許分類】
【出願番号】特願2007−63051(P2007−63051)
【出願日】平成19年3月13日(2007.3.13)
【出願人】(000002082)スズキ株式会社 (3,196)
【Fターム(参考)】
【公開日】平成20年9月25日(2008.9.25)
【国際特許分類】
【出願日】平成19年3月13日(2007.3.13)
【出願人】(000002082)スズキ株式会社 (3,196)
【Fターム(参考)】
[ Back to top ]