
車両制御システム
【課題】
停止位置とカーブが近接又は重複した場合であっても、ドライバに煩わしさを与えることなく、適切に車両を制御するシステムを提供する。
【解決手段】
本車両制御システムは、自車位置を取得する自車位置取得部と、自車の車両情報を取得する車両情報取得部と、自車の前方に存在するカーブ又は一時停止場所の位置を取得するカーブ・停止位置情報取得部と、自車の前方にカーブが存在し、更にその先に停止位置が存在する場合、自車がカーブに入る手前で、減速を開始すべき減速開始位置を設定する減速開始位置設定部と、自車位置,車両情報、及び減速開始位置に基づいて、自車を制御するか否かを判断する判断部と、判断部が自車を制御すると判定した場合、自車を制御する制御部を備え、判断部は、自車が減速開始位置を所定速度以上で通過した場合、自車を制御すると判断する。
停止位置とカーブが近接又は重複した場合であっても、ドライバに煩わしさを与えることなく、適切に車両を制御するシステムを提供する。
【解決手段】
本車両制御システムは、自車位置を取得する自車位置取得部と、自車の車両情報を取得する車両情報取得部と、自車の前方に存在するカーブ又は一時停止場所の位置を取得するカーブ・停止位置情報取得部と、自車の前方にカーブが存在し、更にその先に停止位置が存在する場合、自車がカーブに入る手前で、減速を開始すべき減速開始位置を設定する減速開始位置設定部と、自車位置,車両情報、及び減速開始位置に基づいて、自車を制御するか否かを判断する判断部と、判断部が自車を制御すると判定した場合、自車を制御する制御部を備え、判断部は、自車が減速開始位置を所定速度以上で通過した場合、自車を制御すると判断する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の停止を行う際の制御を行う技術に関する。
【背景技術】
【0002】
一時停止を行う技術に関して、ドライバがブレーキをかけたり、アクセルをオフした場合、ドライバに減速意図があるとみなして何も行わず、上記行為が行われなかった場合、ドライバに減速意図がないとみなして一時停止をすべき場所(以下、一時停止場所)で警報や制動を行う技術がある(特許文献1,2参照)。
【0003】
又、カーブ前で減速する技術及び一時停止を行う技術の組み合わせに関して、カーブ前の減速を考慮して作成した速度曲線と一時停止することを目標に作成した速度曲線を比較し、速度の小さい方の速度曲線を選択し、ブレーキの制動を行う技術がある(特許文献3参照)。
【0004】
【特許文献1】特開平10−76922号公報
【特許文献2】特開2006−301842号公報
【特許文献3】特開2008−12975号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
上記従来技術によれば、一時停止場所の前にカーブがある場合、ドライバは当該一時停止場所の存在に気付かない場合が多いため、アクセルを離した又はブレーキを踏んだ行為による減速意図のみで警報又は制動を解除すると、十分に減速を行わず、カーブを曲がった後に急ブレーキをかけ危険な状態に陥りやすい、という課題がある。又、一時停止場所の前にカーブはあるがドライバがよく知っている道路である場合、ドライバはカーブの先に一時停止場所が存在することを知っているため、カーブ入り口手前までに十分な減速を行っている。この時、警報や制動をかけるとドライバに煩わしさを与える、という課題がある。
【0006】
そこで、本発明の目的は、停止位置とカーブが近接又は重複した場合であっても、ドライバに煩わしさを与えることなく、適切に車両を制御するシステムを提供することにある。
【課題を解決するための手段】
【0007】
上記課題を解決するため、本発明の望ましい態様の一つは次の通りである。
【0008】
本車両制御システムは、自車位置を取得する自車位置取得部と、自車の車両情報を取得する車両情報取得部と、自車の前方に存在するカーブ又は停止位置を取得するカーブ・停止位置情報取得部と、自車の前方にカーブが存在し、更にその先に停止位置が存在する場合、自車がカーブに入る手前で、減速を開始すべき減速開始位置を設定する減速開始位置設定部と、自車位置,車両情報、及び減速開始位置に基づいて、自車を制御するか否かを判断する判断部と、判断部が自車を制御すると判定した場合、自車を制御する制御部を備え、判断部は、自車が減速開始位置を所定速度以上で通過した場合、自車を制御すると判断する。
【発明の効果】
【0009】
本発明によれば、停止位置とカーブが近接又は重複した場合であっても、ドライバに煩わしさを与えることなく、適切に車両を制御するシステムを提供することができる。
【発明を実施するための最良の形態】
【0010】
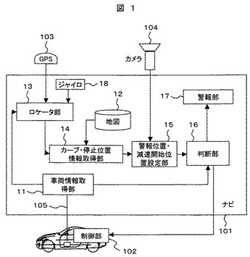
図1は、システム構成図である。
【0011】
当該システムは、カーナビゲーション(以下、ナビ)101,制御部102,GPS(Global Positioning System;自車位置を取得するシステム)103、及び、カメラ104からなり、これらは、車両ネットワーク105を介して接続されている。
【0012】
ナビ101は、車両情報取得部11,地図データベース(以下、地図)12,ロケータ部(自車位置取得部)13,カーブ・停止位置情報取得部14,警報位置・減速開始位置設定部15,判断部16,警報部17、及び、ジャイロ18からなる。
【0013】
車両情報取得部11は、車両ネットワーク105を介して車両から車両情報(自車速度,舵角等)を受信し、ロケータ部13及び判断部16へ送信する。
【0014】
ロケータ部(自車位置取得部)13は、GPS103から受信したGPS情報、車両情報取得部11から受信した車両情報、及びジャイロ18から受信したジャイロ情報等に基づいて自車位置を算出し、当該自車位置を、カーブ・停止位置情報取得部14へ送信する。
【0015】
カーブ・停止位置情報取得部14は、ロケータ部13から受信した自車位置と地図12の地図情報に基づいて、当該自車位置の先に、カーブ又は停止位置が存在するか否かを判定し、当該自車位置から当該カーブ又は停止位置までの距離を計算し、当該距離を、警報位置・減速開始位置設定部15へ送信する。尚、必要に応じて、自車が走行している道路の形状データを送信してもよい。
【0016】
警報位置・減速開始位置設定部15は、カーブ・停止位置情報取得部14から受信した距離に基づいて、警報位置又は減速開始位置及びカーブへの進入速度を設定し、当該位置及び速度を、判断部16へ送信する。ここで、警報位置とは、自車がカーブ入り口に入る前において、その位置で警報を与えないでドライバが停止位置に気付かない状態が続けばカーブを過ぎた後に急ブレーキをかけなければならなくなる位置のことを示す。又、減速開始位置とは、自車がカーブ入り口に入る前において、その位置で減速を開始しなければカーブを過ぎた後に急ブレーキをかけなければならなくなる位置のことを示す。
【0017】
判断部16は、車両情報取得部11から受信した車両情報、及び、警報位置・減速開始位置設定部15から受信した警報位置又は減速開始位置とカーブの進入速度に基づいて、自車が減速を開始すべきか否か、ドライバに警報すべきか否かを判定し、減速開始ならば制動指令及びカーブの進入速度を制御部102へ、警報ならば警報指令を警報部17へ送信する。
【0018】
制御部102は、判断部16から受信した制動指令及びカーブの進入速度に基づいて、自車にブレーキをかける。警報部17は、判断部16から警報指令を受信すると、ナビ101の画面に表示又は音を発することによりドライバへの警報を与える。
【0019】
ここで、本実施例では、一時停止場所とは、交差点,信号のある場所,事故現場,渋滞末尾等を含む、一時停止すべき場所を示すものとする。また、停止位置はこれら一時停止場所を含み、止まっている車輌や障害物の手前で停止すべき位置も含む。
【0020】
上記各々の処理部は、一般にはソフトウェアであり、CPUが記憶装置からプログラムを主記憶装置に読み込み、実行することにより種々の処理を行う。これらのプログラムは、予め記憶装置に格納しておいてもよいし、CD−ROM等の記憶媒体から入力してもよいし、ネットワーク経由で他の装置からダウンロードしてもよい。又、上記各々の処理部を、専用のハードウェアにより実現してもよいし、ソフトウェアとハードウェアの組み合わせにより実現してもよい。
【0021】
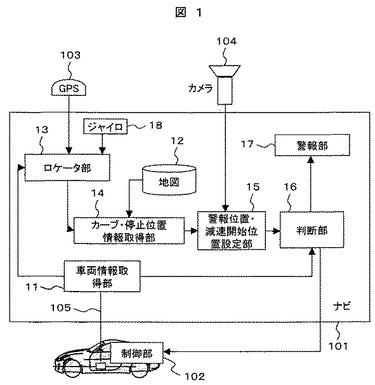
図2は、本システムのフローチャートを示す図である。当該フローチャートは、カーブの先に一時停止場所又は停止位置が存在する場合、ドライバが当該一時停止場所又は停止位置の存在に気付いているか否かを判定し、気付いていない場合に警報又は制動を行うための処理を示す。
【0022】
まず、警報位置・減速開始位置設定部15は、自車前方にカーブが存在し、更にその先に一時停止場所又は停止位置が存在しているか否かを調べる(ステップ21)。
【0023】
ステップ21において、前方のカーブの先に一時停止場所又は停止位置がない場合、通常のカーブ前警報又は減速を行う(ステップ22)。尚、ステップ22については、特開2006−175956号公報及び特開2008−30677号公報に記載がある。
【0024】
前方のカーブの先に一時停止場所又は停止位置がある場合、一時停止に必要な距離L[m]を計算する(ステップ23)。尚、このLは、一時停止場所又は停止位置から自車が存在する方向に道なりに沿った距離を示す。Lは、数1により計算する。
【0025】
(数1)
L=v02/2A+τ×v0
ここで、Aは制動を開始してから停止するまでの減速度[m/s2]、τは人間の反応時間[s]である。Aは予め設定しておき、例えば、普段ドライバが停止する場合の減速度である0.2G(Gは重力加速度)としておく。τは、例えば、予め1sを設定しておく。v0[m/s]は、カーブを安全に曲がった際のカーブ出口の速度を示す。この計算方法として、カーブの曲率Rと予め与えた最大横加速度GCに基づいて、数2により計算する。
【0026】
(数2)
v0=√(GC×R)
ここで、GCは最大横加速度[m/s2]、Rはカーブの最大曲率半径[m]である。尚、カーブの途中でアクセル,ブレーキを踏まない仮定の下、エンジンブレーキによる速度低下分を引いてもよい。
【0027】
次に、カーブ手前で減速するべきか否かの判定を行う(ステップ24)。カーブ出口から一時停止場所までの距離Xを地図より取得し、X<Lの場合、カーブ手前で減速する必要があるため、ステップ26へ移行する。X≧Lの場合、カーブ出口から一時停止を行っても十分間に合うと判断し、通常の一時停止警報,制御を行う(ステップ25)。通常の一時停止警報,制御の方法については、特許文献2に記載がある。
【0028】
次に、カーブの入り口より手前における、警報位置からカーブ入り口までの距離Yの計算を、減速度Aを用いて数3により計算する(ステップ26)。
【0029】
(数3)
Y=(v2−v12)/2A+v×τ
ここで、v[m/s]は現在の自車速度、v1[m/s]はカーブ進入速度、τは人間の反応時間である。カーブ進入速度とは、数2で計算されるv0と、数4で計算される速度v0′(即ち、カーブを出て減速を開始して、減速度Aで一時停止できる速度)のうち、小さい方とする。
【0030】
(数4)
v0′=√(2AX)
Xは、カーブ出口から一時停止場所又は停止位置までの距離[m]である。又、カーブの入り口より手前における、減速開始位置からカーブ入り口までの距離Y′を、数5により計算する。
【0031】
(数5)
Y′=(v12−v2)/2A
Yは、人間が制動をかける場合(制御部102が制動を行う場合)を考慮して計算された距離であり、Y′は、警報のみを行う時の場合(人間が制動を行う場合)を考慮して計算された距離である(即ち、τ=0となる)。
【0032】
次に、自車からカーブの入り口までの距離をナビ又はカメラから取得する(ステップ27)。当該距離を取得する方法は、「西垣戸貴臣、ほか:予防安全の高度化を実現するセンサーフュージョン技術,日立評論, Vol.29, No.08, pp664-655, 2007年」に記載がある。
【0033】
ここまでは、警報位置・減速開始位置設定部15が行う。
【0034】
次に、判断部16は、自車位置が警報位置又は減速開始位置を過ぎ、かつ、速度がv1を超えているか否かを判定し(ステップ28)、越えた場合、警報部17が警報を与える、又は制御部102が制動をかける(ステップ29)。制動をかける場合は、自車位置が減速開始位置を過ぎた場合、カーブ進入速度v1まで減速を行う。警報を与える場合は、ドライバが一時停止場所又は停止位置で停止できる速度に減速するまで警報を続けてもよい。例えば、警報停止条件として、速度がカーブ進入速度未満になるまでとしてもよい。
【0035】
ステップ28において、自車速度がカーブ入り口までにカーブ進入速度v1未満となっている場合、ドライバが一時停止場所又は停止位置に気付いているとして本処理を終了する。
【0036】
尚、カーブの後の一時停止が見えるか否かにより処理を変えてもよい。例えば、ステップ21において、カーブの後、一時停止場所又は停止位置が見えると判断された場合、ステップ22に移行する。
【0037】
カーブの先の一時停止場所がドライバから見える、見えないの判断としては、自車のフロントカメラにより前方の一時停止標識が認識できない場合としてもよい。カメラの画像認識を利用する理由は、雨や陽が落ちて暗い場合、一時停止標識が見通し範囲にあってもドライバが見落としやすいためである。カメラによる一時停止場所又は停止位置を認識する方法については、特開2007−183846号公報及び特開2007−257305号公報に記載がある。
【0038】
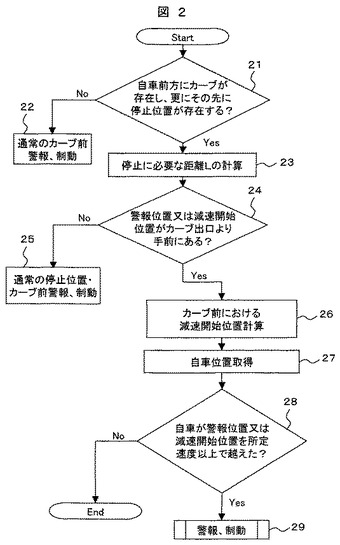
他の方法として、ナビ101が取得した自車位置と地図12の情報に基づいて、自車位置と一時停止場所又は停止位置との間に直線を引き、その直線が道路上にある場合、ドライバは一時停止場所又は停止位置に気付いていると判定し、直線が道路外にはみ出す場合、気付いていないと判定してもよい。これを、図3で説明する。
【0039】
図3では、自車位置31を自車が走行している道路32に重ね書きする。次に、自車が走行している道路32の前方に存在する一時停止線を道路32に重ね書きする。次に、自車位置と一時停止線の間に直線34を引く。この直線34が自車走行道路32上にある場合、ドライバが気付いている一時停止場所又は停止位置であると判定する。直線34が自車走行道路32外にはみ出している場合、ドライバが気付いていない一時停止場所又は停止位置であると判定する。図3の例では、直線は自車走行道路外にはみ出している。
【0040】
次に、直線34が道路外にはみ出しているか否かの判定を、ソフトウェアで実現するための方法について説明する。自車走行道路32は、地図12では道路の補間点群と道路幅でデータを保持している。このため、それぞれの補間点と直線の最短距離を求める。そして、この補間点と直線の距離が道路幅/2を越えた場合、道路外に直線がはみ出していると判断する。
【0041】
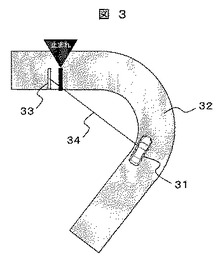
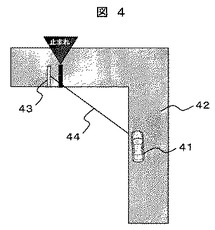
続いて、直角に曲がる場合について、図4を用いて説明する。
【0042】
図4では、自車位置41を自車が走行している道路42に重ね書きする。次に、自車が走行している道路42の前方に存在する一時停止線を道路42に重ね書きする。次に、自車位置と一時停止線の間に直線44を引く。この直線44が自車走行道路42上にある場合、ドライバが気付いている一時停止場所であると判定する。直線44が自車走行道路42外にはみ出している場合、ドライバが気付いていない一時停止場所であると判定する。
図4の例では、直線は自車走行道路外にはみ出している。
【0043】
次に、減速度Aの設定について、ナビ101で気象状況,明るさ,道路の幅が取得できるならば、この情報を用い、Aの値を変化させてもよい。例えば、雨の場合には普段の値より0.05Gだけ低くし、雪の場合には0.1Gだけ低くしてもよい。明るい場合には、0.05Gだけ高くし、暗い場合には0.05Gだけ低くしてもよい。道路の幅が狭い場合には0.05Gだけ低くしてもよい。
【0044】
本実施例では、警報を与える又は制動をかける、として説明しているが、何れか一方のみの制御でも、双方同時の制御でも構わない。又、警報を与えるべきか制動をかけるべきかを選択する選択部を設けてもよい。選択部は、ドライバによるスイッチの操作により選択してもよいし、自車速度や天候や周囲の明るさなどに応じて緊急度を割り出し、当該緊急度に応じて選択してもよい。又、制御部102が制動をかける場合には、ブレーキ,エンジンブレーキ又はギアをシフトダウンすることにより制動をかける。
【0045】
次に、停止車両が自車走行道路上に存在する場合について説明する。
【0046】
ドライバが気付きにくい停止車両の検出方法としては、ナビ101の車車間通信、又は路車間通信を用いる。通信としては、通常用いられる携帯電話を用いてもよい。車車間の場合には、停止車両から送られる、位置と速度を用いる。路車間の場合には、カーブの先に設置されたインフラ側のカメラの認識結果である、停止車両の有無と速度を得る。尚、図2のステップ23では、停止車両が存在する位置を一時停止場所又は停止位置として同様な処理を行う。又、一時停止を行わずに、操舵回避をしてもよい。この場合には、停止車両の手前までに操舵回避が可能な速度まで低下するようにする。操舵回避が可能な速度v2は30km/hとしてもよい。操舵回避を行う方法としては、特開2007−34988号公報に記載がある。
【0047】
事故現場や渋滞末尾を一時停止場所又は停止位置として検出する場合も、車車間通信や路車間通信を用いることができる。
【0048】
次に、制動までに必要な距離は数1の代わりに数6として計算する。ここでは制御部102が制御をかけるためドライバの反応遅れ時間は0とする。
【0049】
(数6)
L=(v02−v22)/2A
残りの計算方法は、図2のステップと同様に行うが、最後の制動の後、停止車両の手前で操舵回避を行う。
【0050】
本実施例によれば、ドライバが気付きにくい一時停止場所又は停止位置に気付いているか否かを、ナビ情報を利用し、カーブ前の速度等に基づいて判定するため、新たなセンサを付加する事なく低コストでカーブ前減速が行うことができる。又、ドライバが通勤道路等で一時停止場所又は停止位置に気付いていて、十分に減速を行う場合には、システムが介入しないためドライバの受容性を高めることができる。
【図面の簡単な説明】
【0051】
【図1】システム構成図。
【図2】システムのフローチャート。
【図3】カーブ又は停止位置判定の一手法を示す図。
【図4】直角に曲がる場合の一時停止場所判定の一手法を示す図。
【符号の説明】
【0052】
11 車両情報取得部
12 地図
13 ロケータ部
14 カーブ・停止位置情報取得部
15 警報位置・減速開始位置設定部
16 判断部
17 警報部
18 ジャイロ
101 ナビ
102 制御部
103 GPS
104 カメラ
105 車両ネットワーク
【技術分野】
【0001】
本発明は、車両の停止を行う際の制御を行う技術に関する。
【背景技術】
【0002】
一時停止を行う技術に関して、ドライバがブレーキをかけたり、アクセルをオフした場合、ドライバに減速意図があるとみなして何も行わず、上記行為が行われなかった場合、ドライバに減速意図がないとみなして一時停止をすべき場所(以下、一時停止場所)で警報や制動を行う技術がある(特許文献1,2参照)。
【0003】
又、カーブ前で減速する技術及び一時停止を行う技術の組み合わせに関して、カーブ前の減速を考慮して作成した速度曲線と一時停止することを目標に作成した速度曲線を比較し、速度の小さい方の速度曲線を選択し、ブレーキの制動を行う技術がある(特許文献3参照)。
【0004】
【特許文献1】特開平10−76922号公報
【特許文献2】特開2006−301842号公報
【特許文献3】特開2008−12975号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
上記従来技術によれば、一時停止場所の前にカーブがある場合、ドライバは当該一時停止場所の存在に気付かない場合が多いため、アクセルを離した又はブレーキを踏んだ行為による減速意図のみで警報又は制動を解除すると、十分に減速を行わず、カーブを曲がった後に急ブレーキをかけ危険な状態に陥りやすい、という課題がある。又、一時停止場所の前にカーブはあるがドライバがよく知っている道路である場合、ドライバはカーブの先に一時停止場所が存在することを知っているため、カーブ入り口手前までに十分な減速を行っている。この時、警報や制動をかけるとドライバに煩わしさを与える、という課題がある。
【0006】
そこで、本発明の目的は、停止位置とカーブが近接又は重複した場合であっても、ドライバに煩わしさを与えることなく、適切に車両を制御するシステムを提供することにある。
【課題を解決するための手段】
【0007】
上記課題を解決するため、本発明の望ましい態様の一つは次の通りである。
【0008】
本車両制御システムは、自車位置を取得する自車位置取得部と、自車の車両情報を取得する車両情報取得部と、自車の前方に存在するカーブ又は停止位置を取得するカーブ・停止位置情報取得部と、自車の前方にカーブが存在し、更にその先に停止位置が存在する場合、自車がカーブに入る手前で、減速を開始すべき減速開始位置を設定する減速開始位置設定部と、自車位置,車両情報、及び減速開始位置に基づいて、自車を制御するか否かを判断する判断部と、判断部が自車を制御すると判定した場合、自車を制御する制御部を備え、判断部は、自車が減速開始位置を所定速度以上で通過した場合、自車を制御すると判断する。
【発明の効果】
【0009】
本発明によれば、停止位置とカーブが近接又は重複した場合であっても、ドライバに煩わしさを与えることなく、適切に車両を制御するシステムを提供することができる。
【発明を実施するための最良の形態】
【0010】
図1は、システム構成図である。
【0011】
当該システムは、カーナビゲーション(以下、ナビ)101,制御部102,GPS(Global Positioning System;自車位置を取得するシステム)103、及び、カメラ104からなり、これらは、車両ネットワーク105を介して接続されている。
【0012】
ナビ101は、車両情報取得部11,地図データベース(以下、地図)12,ロケータ部(自車位置取得部)13,カーブ・停止位置情報取得部14,警報位置・減速開始位置設定部15,判断部16,警報部17、及び、ジャイロ18からなる。
【0013】
車両情報取得部11は、車両ネットワーク105を介して車両から車両情報(自車速度,舵角等)を受信し、ロケータ部13及び判断部16へ送信する。
【0014】
ロケータ部(自車位置取得部)13は、GPS103から受信したGPS情報、車両情報取得部11から受信した車両情報、及びジャイロ18から受信したジャイロ情報等に基づいて自車位置を算出し、当該自車位置を、カーブ・停止位置情報取得部14へ送信する。
【0015】
カーブ・停止位置情報取得部14は、ロケータ部13から受信した自車位置と地図12の地図情報に基づいて、当該自車位置の先に、カーブ又は停止位置が存在するか否かを判定し、当該自車位置から当該カーブ又は停止位置までの距離を計算し、当該距離を、警報位置・減速開始位置設定部15へ送信する。尚、必要に応じて、自車が走行している道路の形状データを送信してもよい。
【0016】
警報位置・減速開始位置設定部15は、カーブ・停止位置情報取得部14から受信した距離に基づいて、警報位置又は減速開始位置及びカーブへの進入速度を設定し、当該位置及び速度を、判断部16へ送信する。ここで、警報位置とは、自車がカーブ入り口に入る前において、その位置で警報を与えないでドライバが停止位置に気付かない状態が続けばカーブを過ぎた後に急ブレーキをかけなければならなくなる位置のことを示す。又、減速開始位置とは、自車がカーブ入り口に入る前において、その位置で減速を開始しなければカーブを過ぎた後に急ブレーキをかけなければならなくなる位置のことを示す。
【0017】
判断部16は、車両情報取得部11から受信した車両情報、及び、警報位置・減速開始位置設定部15から受信した警報位置又は減速開始位置とカーブの進入速度に基づいて、自車が減速を開始すべきか否か、ドライバに警報すべきか否かを判定し、減速開始ならば制動指令及びカーブの進入速度を制御部102へ、警報ならば警報指令を警報部17へ送信する。
【0018】
制御部102は、判断部16から受信した制動指令及びカーブの進入速度に基づいて、自車にブレーキをかける。警報部17は、判断部16から警報指令を受信すると、ナビ101の画面に表示又は音を発することによりドライバへの警報を与える。
【0019】
ここで、本実施例では、一時停止場所とは、交差点,信号のある場所,事故現場,渋滞末尾等を含む、一時停止すべき場所を示すものとする。また、停止位置はこれら一時停止場所を含み、止まっている車輌や障害物の手前で停止すべき位置も含む。
【0020】
上記各々の処理部は、一般にはソフトウェアであり、CPUが記憶装置からプログラムを主記憶装置に読み込み、実行することにより種々の処理を行う。これらのプログラムは、予め記憶装置に格納しておいてもよいし、CD−ROM等の記憶媒体から入力してもよいし、ネットワーク経由で他の装置からダウンロードしてもよい。又、上記各々の処理部を、専用のハードウェアにより実現してもよいし、ソフトウェアとハードウェアの組み合わせにより実現してもよい。
【0021】
図2は、本システムのフローチャートを示す図である。当該フローチャートは、カーブの先に一時停止場所又は停止位置が存在する場合、ドライバが当該一時停止場所又は停止位置の存在に気付いているか否かを判定し、気付いていない場合に警報又は制動を行うための処理を示す。
【0022】
まず、警報位置・減速開始位置設定部15は、自車前方にカーブが存在し、更にその先に一時停止場所又は停止位置が存在しているか否かを調べる(ステップ21)。
【0023】
ステップ21において、前方のカーブの先に一時停止場所又は停止位置がない場合、通常のカーブ前警報又は減速を行う(ステップ22)。尚、ステップ22については、特開2006−175956号公報及び特開2008−30677号公報に記載がある。
【0024】
前方のカーブの先に一時停止場所又は停止位置がある場合、一時停止に必要な距離L[m]を計算する(ステップ23)。尚、このLは、一時停止場所又は停止位置から自車が存在する方向に道なりに沿った距離を示す。Lは、数1により計算する。
【0025】
(数1)
L=v02/2A+τ×v0
ここで、Aは制動を開始してから停止するまでの減速度[m/s2]、τは人間の反応時間[s]である。Aは予め設定しておき、例えば、普段ドライバが停止する場合の減速度である0.2G(Gは重力加速度)としておく。τは、例えば、予め1sを設定しておく。v0[m/s]は、カーブを安全に曲がった際のカーブ出口の速度を示す。この計算方法として、カーブの曲率Rと予め与えた最大横加速度GCに基づいて、数2により計算する。
【0026】
(数2)
v0=√(GC×R)
ここで、GCは最大横加速度[m/s2]、Rはカーブの最大曲率半径[m]である。尚、カーブの途中でアクセル,ブレーキを踏まない仮定の下、エンジンブレーキによる速度低下分を引いてもよい。
【0027】
次に、カーブ手前で減速するべきか否かの判定を行う(ステップ24)。カーブ出口から一時停止場所までの距離Xを地図より取得し、X<Lの場合、カーブ手前で減速する必要があるため、ステップ26へ移行する。X≧Lの場合、カーブ出口から一時停止を行っても十分間に合うと判断し、通常の一時停止警報,制御を行う(ステップ25)。通常の一時停止警報,制御の方法については、特許文献2に記載がある。
【0028】
次に、カーブの入り口より手前における、警報位置からカーブ入り口までの距離Yの計算を、減速度Aを用いて数3により計算する(ステップ26)。
【0029】
(数3)
Y=(v2−v12)/2A+v×τ
ここで、v[m/s]は現在の自車速度、v1[m/s]はカーブ進入速度、τは人間の反応時間である。カーブ進入速度とは、数2で計算されるv0と、数4で計算される速度v0′(即ち、カーブを出て減速を開始して、減速度Aで一時停止できる速度)のうち、小さい方とする。
【0030】
(数4)
v0′=√(2AX)
Xは、カーブ出口から一時停止場所又は停止位置までの距離[m]である。又、カーブの入り口より手前における、減速開始位置からカーブ入り口までの距離Y′を、数5により計算する。
【0031】
(数5)
Y′=(v12−v2)/2A
Yは、人間が制動をかける場合(制御部102が制動を行う場合)を考慮して計算された距離であり、Y′は、警報のみを行う時の場合(人間が制動を行う場合)を考慮して計算された距離である(即ち、τ=0となる)。
【0032】
次に、自車からカーブの入り口までの距離をナビ又はカメラから取得する(ステップ27)。当該距離を取得する方法は、「西垣戸貴臣、ほか:予防安全の高度化を実現するセンサーフュージョン技術,日立評論, Vol.29, No.08, pp664-655, 2007年」に記載がある。
【0033】
ここまでは、警報位置・減速開始位置設定部15が行う。
【0034】
次に、判断部16は、自車位置が警報位置又は減速開始位置を過ぎ、かつ、速度がv1を超えているか否かを判定し(ステップ28)、越えた場合、警報部17が警報を与える、又は制御部102が制動をかける(ステップ29)。制動をかける場合は、自車位置が減速開始位置を過ぎた場合、カーブ進入速度v1まで減速を行う。警報を与える場合は、ドライバが一時停止場所又は停止位置で停止できる速度に減速するまで警報を続けてもよい。例えば、警報停止条件として、速度がカーブ進入速度未満になるまでとしてもよい。
【0035】
ステップ28において、自車速度がカーブ入り口までにカーブ進入速度v1未満となっている場合、ドライバが一時停止場所又は停止位置に気付いているとして本処理を終了する。
【0036】
尚、カーブの後の一時停止が見えるか否かにより処理を変えてもよい。例えば、ステップ21において、カーブの後、一時停止場所又は停止位置が見えると判断された場合、ステップ22に移行する。
【0037】
カーブの先の一時停止場所がドライバから見える、見えないの判断としては、自車のフロントカメラにより前方の一時停止標識が認識できない場合としてもよい。カメラの画像認識を利用する理由は、雨や陽が落ちて暗い場合、一時停止標識が見通し範囲にあってもドライバが見落としやすいためである。カメラによる一時停止場所又は停止位置を認識する方法については、特開2007−183846号公報及び特開2007−257305号公報に記載がある。
【0038】
他の方法として、ナビ101が取得した自車位置と地図12の情報に基づいて、自車位置と一時停止場所又は停止位置との間に直線を引き、その直線が道路上にある場合、ドライバは一時停止場所又は停止位置に気付いていると判定し、直線が道路外にはみ出す場合、気付いていないと判定してもよい。これを、図3で説明する。
【0039】
図3では、自車位置31を自車が走行している道路32に重ね書きする。次に、自車が走行している道路32の前方に存在する一時停止線を道路32に重ね書きする。次に、自車位置と一時停止線の間に直線34を引く。この直線34が自車走行道路32上にある場合、ドライバが気付いている一時停止場所又は停止位置であると判定する。直線34が自車走行道路32外にはみ出している場合、ドライバが気付いていない一時停止場所又は停止位置であると判定する。図3の例では、直線は自車走行道路外にはみ出している。
【0040】
次に、直線34が道路外にはみ出しているか否かの判定を、ソフトウェアで実現するための方法について説明する。自車走行道路32は、地図12では道路の補間点群と道路幅でデータを保持している。このため、それぞれの補間点と直線の最短距離を求める。そして、この補間点と直線の距離が道路幅/2を越えた場合、道路外に直線がはみ出していると判断する。
【0041】
続いて、直角に曲がる場合について、図4を用いて説明する。
【0042】
図4では、自車位置41を自車が走行している道路42に重ね書きする。次に、自車が走行している道路42の前方に存在する一時停止線を道路42に重ね書きする。次に、自車位置と一時停止線の間に直線44を引く。この直線44が自車走行道路42上にある場合、ドライバが気付いている一時停止場所であると判定する。直線44が自車走行道路42外にはみ出している場合、ドライバが気付いていない一時停止場所であると判定する。
図4の例では、直線は自車走行道路外にはみ出している。
【0043】
次に、減速度Aの設定について、ナビ101で気象状況,明るさ,道路の幅が取得できるならば、この情報を用い、Aの値を変化させてもよい。例えば、雨の場合には普段の値より0.05Gだけ低くし、雪の場合には0.1Gだけ低くしてもよい。明るい場合には、0.05Gだけ高くし、暗い場合には0.05Gだけ低くしてもよい。道路の幅が狭い場合には0.05Gだけ低くしてもよい。
【0044】
本実施例では、警報を与える又は制動をかける、として説明しているが、何れか一方のみの制御でも、双方同時の制御でも構わない。又、警報を与えるべきか制動をかけるべきかを選択する選択部を設けてもよい。選択部は、ドライバによるスイッチの操作により選択してもよいし、自車速度や天候や周囲の明るさなどに応じて緊急度を割り出し、当該緊急度に応じて選択してもよい。又、制御部102が制動をかける場合には、ブレーキ,エンジンブレーキ又はギアをシフトダウンすることにより制動をかける。
【0045】
次に、停止車両が自車走行道路上に存在する場合について説明する。
【0046】
ドライバが気付きにくい停止車両の検出方法としては、ナビ101の車車間通信、又は路車間通信を用いる。通信としては、通常用いられる携帯電話を用いてもよい。車車間の場合には、停止車両から送られる、位置と速度を用いる。路車間の場合には、カーブの先に設置されたインフラ側のカメラの認識結果である、停止車両の有無と速度を得る。尚、図2のステップ23では、停止車両が存在する位置を一時停止場所又は停止位置として同様な処理を行う。又、一時停止を行わずに、操舵回避をしてもよい。この場合には、停止車両の手前までに操舵回避が可能な速度まで低下するようにする。操舵回避が可能な速度v2は30km/hとしてもよい。操舵回避を行う方法としては、特開2007−34988号公報に記載がある。
【0047】
事故現場や渋滞末尾を一時停止場所又は停止位置として検出する場合も、車車間通信や路車間通信を用いることができる。
【0048】
次に、制動までに必要な距離は数1の代わりに数6として計算する。ここでは制御部102が制御をかけるためドライバの反応遅れ時間は0とする。
【0049】
(数6)
L=(v02−v22)/2A
残りの計算方法は、図2のステップと同様に行うが、最後の制動の後、停止車両の手前で操舵回避を行う。
【0050】
本実施例によれば、ドライバが気付きにくい一時停止場所又は停止位置に気付いているか否かを、ナビ情報を利用し、カーブ前の速度等に基づいて判定するため、新たなセンサを付加する事なく低コストでカーブ前減速が行うことができる。又、ドライバが通勤道路等で一時停止場所又は停止位置に気付いていて、十分に減速を行う場合には、システムが介入しないためドライバの受容性を高めることができる。
【図面の簡単な説明】
【0051】
【図1】システム構成図。
【図2】システムのフローチャート。
【図3】カーブ又は停止位置判定の一手法を示す図。
【図4】直角に曲がる場合の一時停止場所判定の一手法を示す図。
【符号の説明】
【0052】
11 車両情報取得部
12 地図
13 ロケータ部
14 カーブ・停止位置情報取得部
15 警報位置・減速開始位置設定部
16 判断部
17 警報部
18 ジャイロ
101 ナビ
102 制御部
103 GPS
104 カメラ
105 車両ネットワーク
【特許請求の範囲】
【請求項1】
自車位置を取得する自車位置取得部と、
前記自車の車両情報を取得する車両情報取得部と、
前記自車の前方に存在するカーブ及び停止位置を取得するカーブ・停止位置情報取得部と、
前記自車の前方にカーブが存在し、更にその先に停止位置が存在する場合、前記自車が前記カーブに入る手前で、減速を開始すべき減速開始位置を設定する減速開始位置設定部と、
前記自車位置,前記車両情報、及び前記減速開始位置に基づいて、前記自車が前記減速開始位置を所定速度以上で通過した場合、前記自車を制御すると判断する判断部と、
前記判断部が前記自車を制御すると判定した場合、前記自車を制御する制御部を備える、車両制御システム。
【請求項2】
前記自車を制御すると判断した場合の前記自車の制御は、前記自車の車速を低下させる、請求項1記載の車両制御システム。
【請求項3】
前記判断部は、前記自車が有する地図情報に基づいて、ドライバが前記停止位置を見えるか否かを判断し、見えないと判断した場合、前記自車を制御すると判断する、請求項1乃至2何れか一に記載の車両制御システム。
【請求項4】
前記判断部は、前記自車が有するカメラが停止位置を認識しない場合、前記自車を制御すると判断する、請求項1乃至3何れか一に記載の車両制御システム。
【請求項5】
前記減速開始位置は、予め設定されている減速度に基づいて計算される、請求項1乃至4何れか一に記載の車両制御システム。
【請求項6】
前記所定速度とは、前記自車がカーブを抜け、前記ドライバが停止位置に気付いたと判断された場合に、予め設定した減速度で停止できる速度を示す、請求項1乃至5何れか一に記載の車両制御システム。
【請求項7】
前記判断部は、前記停止位置が存在する場合、操舵回避を行うか否かを判断する、請求項1乃至6何れか一に記載の車両制御システム。
【請求項8】
自車位置を取得する自車位置取得部と、
前記自車の車両情報を取得する車両情報取得部と、
前記自車の前方に存在するカーブ及び停止位置を取得するカーブ・停止位置情報取得部と、
前記自車の前方にカーブが存在し、更にその先に停止位置が存在する場合、前記自車が前記カーブに入る手前で、ドライバに警報を与えるべき警報位置を設定する警報位置設定部と、
前記自車位置,前記車両情報、及び前記警報位置に基づいて、前記自車が前記警報位置を所定速度以上で通過した場合、前記ドライバに警報を与えると判断する判断部を備える、車両警報報知システム。
【請求項9】
前記判断部は、前記ドライバに警報を与える場合、前記自車が前記停止位置で停止できる速度に減速するまで警報を続けると判断する、請求項8記載の車両警報報知システム。
【請求項1】
自車位置を取得する自車位置取得部と、
前記自車の車両情報を取得する車両情報取得部と、
前記自車の前方に存在するカーブ及び停止位置を取得するカーブ・停止位置情報取得部と、
前記自車の前方にカーブが存在し、更にその先に停止位置が存在する場合、前記自車が前記カーブに入る手前で、減速を開始すべき減速開始位置を設定する減速開始位置設定部と、
前記自車位置,前記車両情報、及び前記減速開始位置に基づいて、前記自車が前記減速開始位置を所定速度以上で通過した場合、前記自車を制御すると判断する判断部と、
前記判断部が前記自車を制御すると判定した場合、前記自車を制御する制御部を備える、車両制御システム。
【請求項2】
前記自車を制御すると判断した場合の前記自車の制御は、前記自車の車速を低下させる、請求項1記載の車両制御システム。
【請求項3】
前記判断部は、前記自車が有する地図情報に基づいて、ドライバが前記停止位置を見えるか否かを判断し、見えないと判断した場合、前記自車を制御すると判断する、請求項1乃至2何れか一に記載の車両制御システム。
【請求項4】
前記判断部は、前記自車が有するカメラが停止位置を認識しない場合、前記自車を制御すると判断する、請求項1乃至3何れか一に記載の車両制御システム。
【請求項5】
前記減速開始位置は、予め設定されている減速度に基づいて計算される、請求項1乃至4何れか一に記載の車両制御システム。
【請求項6】
前記所定速度とは、前記自車がカーブを抜け、前記ドライバが停止位置に気付いたと判断された場合に、予め設定した減速度で停止できる速度を示す、請求項1乃至5何れか一に記載の車両制御システム。
【請求項7】
前記判断部は、前記停止位置が存在する場合、操舵回避を行うか否かを判断する、請求項1乃至6何れか一に記載の車両制御システム。
【請求項8】
自車位置を取得する自車位置取得部と、
前記自車の車両情報を取得する車両情報取得部と、
前記自車の前方に存在するカーブ及び停止位置を取得するカーブ・停止位置情報取得部と、
前記自車の前方にカーブが存在し、更にその先に停止位置が存在する場合、前記自車が前記カーブに入る手前で、ドライバに警報を与えるべき警報位置を設定する警報位置設定部と、
前記自車位置,前記車両情報、及び前記警報位置に基づいて、前記自車が前記警報位置を所定速度以上で通過した場合、前記ドライバに警報を与えると判断する判断部を備える、車両警報報知システム。
【請求項9】
前記判断部は、前記ドライバに警報を与える場合、前記自車が前記停止位置で停止できる速度に減速するまで警報を続けると判断する、請求項8記載の車両警報報知システム。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2010−18075(P2010−18075A)
【公開日】平成22年1月28日(2010.1.28)
【国際特許分類】
【出願番号】特願2008−178576(P2008−178576)
【出願日】平成20年7月9日(2008.7.9)
【出願人】(591132335)株式会社ザナヴィ・インフォマティクス (745)
【Fターム(参考)】
【公開日】平成22年1月28日(2010.1.28)
【国際特許分類】
【出願日】平成20年7月9日(2008.7.9)
【出願人】(591132335)株式会社ザナヴィ・インフォマティクス (745)
【Fターム(参考)】
[ Back to top ]