
車両制御システム
【課題】車両の制御における制御目標を適切なものとすることができる車両制御システムを提供すること。
【解決手段】道路上の車両の走行状態に関する情報に基づいて要求される第一の要求加速度acooperateおよび自車両の直前を走行する先行車あるいは自車両の前方の障害物の少なくともいずれか一方と自車両との相対関係に基づいて要求される第二の要求加速度aaccから目標加速度を選択する場合、第一の要求加速度および第二の要求加速度のうち最小の加速度を目標加速度として自車両の加速度を制御する。
【解決手段】道路上の車両の走行状態に関する情報に基づいて要求される第一の要求加速度acooperateおよび自車両の直前を走行する先行車あるいは自車両の前方の障害物の少なくともいずれか一方と自車両との相対関係に基づいて要求される第二の要求加速度aaccから目標加速度を選択する場合、第一の要求加速度および第二の要求加速度のうち最小の加速度を目標加速度として自車両の加速度を制御する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両制御システムに関する。
【背景技術】
【0002】
従来、目標車速に基づき自車の走行を制御する技術が知られている。例えば、特許文献1には、クルーズコントロール車速および自車走行レーンにおける制限車速のうち小さい車速を目標車速として自車の走行を制御する車両用走行制御システムの技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−208661号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
車両の制御における目標を適切なものとすることについて、なお検討の余地がある。例えば、目標車速を実現するまでの過程も考慮することが望ましい。また、道路の交通状況や先行車との関係等によって適切な制御の態様が異なることが考えられる。
【0005】
本発明の目的は、車両の制御における制御目標を適切なものとすることができる車両制御システムを提供することである。
【課題を解決するための手段】
【0006】
本発明の車両制御システムは、道路上の車両の走行状態に関する情報に基づいて要求される第一の要求加速度および自車両の直前を走行する先行車あるいは自車両の前方の障害物の少なくともいずれか一方と自車両との相対関係に基づいて要求される第二の要求加速度から目標加速度を選択する場合、前記第一の要求加速度および前記第二の要求加速度のうち最小の加速度を前記目標加速度として自車両の加速度を制御することを特徴とする。
【0007】
上記車両制御システムにおいて、前記第一の要求加速度は、前記走行状態に関する情報に基づく目標速度に基づいて算出されることが好ましい。
【0008】
上記車両制御システムにおいて、前記走行状態に関する情報は、自車両の前方を走行する車両の速度である前方車両速度を含むものであって、前記目標速度は、前記前方車両速度に基づいて決定されることが好ましい。
【0009】
上記車両制御システムにおいて、前記目標速度は、前記道路における渋滞の発生を抑制可能な速度であることが好ましい。
【0010】
上記車両制御システムにおいて、前記走行状態に関する情報は、前記道路の交通量を含むものであって、前記目標速度は、走行速度と前記道路を通行可能な交通量との関係に基づいて算出されることが好ましい。
【0011】
上記車両制御システムにおいて、運転者が所望する車速である設定車速が入力されており、かつ前記目標速度が前記設定車速を超えている場合であって、前記加速度の制御によって前記設定車速を超える車速で自車両を走行させようとする場合、予め前記運転者に前記設定車速を超える車速で走行させることについての許可を得ることが好ましい。
【0012】
上記車両制御システムにおいて、前記第一の要求加速度は、自車両の前方の前記走行状態に関する情報に基づく直前の車両との相対関係の目標値に基づいて算出されることが好ましい。
【0013】
上記車両制御システムにおいて、前記第一の要求加速度は、自車両の前方の前記走行状態に関する情報に基づく最適な加速度に基づいて算出されることが好ましい。
【0014】
上記車両制御システムにおいて、前記走行状態に関する情報は、自車両の前方を走行する車両における加速度の目標値である前方車両加速度目標値を含むものであって、前記最適な加速度とは、前記前方車両加速度目標値であることが好ましい。
【発明の効果】
【0015】
本発明にかかる車両制御システムは、道路上の車両の走行状態に関する情報に基づいて要求される第一の要求加速度および自車両の直前を走行する先行車あるいは自車両の前方の障害物の少なくともいずれか一方と自車両との相対関係に基づいて要求される第二の要求加速度のうち最小の加速度を目標加速度として自車両の加速度を制御する。本発明にかかる車両制御システムによれば、先行車等との相対関係を確保することと道路上の車両の走行状態に基づいて自車両を制御することとの両立を図り、車両の制御における制御目標を適切なものとすることができるという効果を奏する。
【図面の簡単な説明】
【0016】
【図1】図1は、本実施形態における要求加速度の調停方法を示す図である。
【図2】図2は、実施形態にかかる車両制御システムが搭載された車両を示す図である。
【図3】図3は、インフラシステムを示す図である。
【図4】図4は、実施形態のECUが有する機能について説明するための図である。
【図5】図5は、実施形態のECUが有する機能について説明するための他の図である。
【図6】図6は、渋滞状態および臨界状態の判断方法の一例について説明するための図である。
【図7】図7は、減速ショックウェーブが発生した状態を示す図である。
【図8】図8は、減速ショックウェーブ発生時の車両制御について説明するための図である。
【図9】図9は、自車両の前方に渋滞が発生した状態を示す図である。
【図10】図10は、渋滞接近時の車両制御について説明するための図である。
【図11】図11は、前方の渋滞が解消された状態を示す図である。
【図12】図12は、前方の渋滞が解消されたときの車両制御について説明するための図である。
【発明を実施するための形態】
【0017】
以下に、本発明の実施形態にかかる車両制御システムにつき図面を参照しつつ詳細に説明する。なお、この実施形態によりこの発明が限定されるものではない。また、下記の実施形態における構成要素には、当業者が容易に想定できるものあるいは実質的に同一のものが含まれる。
【0018】
(実施形態)
図1から図12を参照して、実施形態について説明する。本実施形態は、車両制御システムに関する。図1は、本実施形態における要求加速度の調停方法を示す図、図2は、本実施形態にかかる車両制御システム1−1が搭載された車両を示す図、図3は、インフラシステムを示す図である。
【0019】
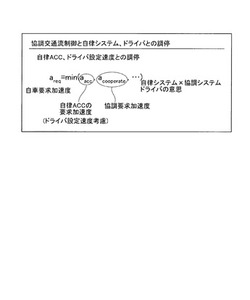
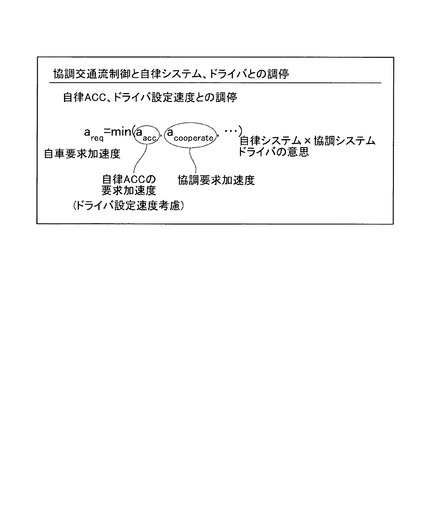
図1に示すように、本実施形態では、ACC制御の要求加速度と協調要求加速度の2種類の要求加速度から目標とする加速度を選択する場合、それらの要求加速度の最小値が選択される。そして、選択された加速度を目標加速度として、自車両の加速度が制御される。ここで、協調要求加速度とは、共通の「あるべき速度」を目標速度とするなど、道路上の車両の走行状態に関する情報に基づいて複数の車両を協調して走行させる協調交通流制御の要求加速度である。本実施形態の協調要求加速度は、第一の要求加速度に対応している。また、ACC制御の要求加速度は、自車両の直前を走行する先行車と自車両との相対関係に基づいて要求されるものであり、第二の要求加速度に対応する。
【0020】
「あるべき速度」とは、例えば、渋滞の発生を抑制可能な速度として算出されるものである。ACC制御の要求加速度が協調要求加速度を上回る場合、自車要求加速度として協調要求加速度が採用される。一方、ACC制御の要求加速度が協調要求加速度を下回る場合、先行車との車間の確保を優先してACC制御の要求加速度が自車要求加速度として採用される。
【0021】
本実施形態の要求加速度の調停によれば、常に、システムが減速側に働く。直前を走行する先行車が協調交通流制御のシステムを搭載していない車両であると、先行車に対してはACC制御の減速側支援が優先される。また、運転者が設定した速度へ追従するための要求加速度も調停対象となるため、協調要求加速度が運転者の設定車速以上に加速させてしまわないように調停することができる。
【0022】
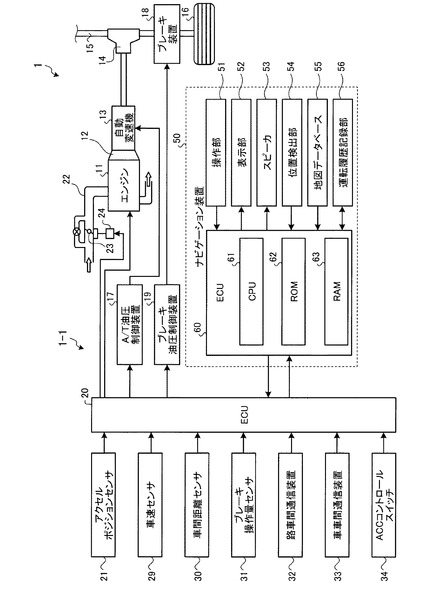
図2に示すように、車両1には、エンジン11が設けられている。エンジン11には、トルクコンバータ12を有する自動変速機13が連結されている。エンジン11の駆動力は、トルクコンバータ12を介して自動変速機13に入力され、デファレンシャルギヤ14及びドライブシャフト15を介して駆動輪16に伝達される。自動変速機13は、A/T油圧制御装置17により車両の運転状態に応じて変速比が自動的に制御される。ブレーキ装置18は、ブレーキ油圧制御装置19によって制御されて、車両を制動する。
【0023】
車両1には、エンジン11や自動変速機13やブレーキ装置18などを制御する電子制御ユニット(ECU)20が設けられている。ECU20は、エンジン11、自動変速機13(A/T油圧制御装置17)及びブレーキ装置18(ブレーキ油圧制御装置19)の総合的な制御を行う。本実施形態では、エンジン11は、ECU20によって制御されて出力トルクが調節されることで、車両の加速度(駆動力)を制御する加速度制御手段として機能することができる。また、ブレーキ装置18は、ECU20によって制動力が制御されることで車両1の加速度(負の加速度)を制御する減速度制御手段として機能することができる。ECU20は、自車要求加速度を目標加速度としてエンジン11やブレーキ装置18等を制御し、目標加速度を実現する車両制御装置としての機能を有する。
【0024】
車両1には、アクセルペダルの操作量(アクセル開度)を検出するアクセルポジションセンサ21が設けられている。アクセルポジションセンサ21により検出されたアクセル開度を示す信号は、ECU20に出力される。エンジン11の吸気管22に設けられたスロットルコントロールバルブ23は、スロットルアクチュエータ24により開閉可能とされている。ECU20は、アクセル開度にかかわらずスロットルアクチュエータ24によりスロットルコントロールバルブ23のスロットル開度を制御することができる。車両1には、スロットルコントロールバルブ23の全閉状態(アイドル状態)及びスロットル開度を検出する図示しないスロットル開度センサが設けられている。スロットル開度センサによって検出されたアイドル状態及びスロットル開度のそれぞれを示す信号は、ECU20に出力される。
【0025】
車速センサ29は、車両1の車速を検出するものである。車間距離センサ30は、自車両と直前の車両との車間距離を検出することができる。車間距離センサ30は、例えば、車両前部に搭載されたレーザーレーダーセンサ又はミリ波レーダーセンサなどのセンサとすることができる。車間距離センサ30は、自車両の前方の障害物を検出することも可能である。ブレーキ操作量センサ31は、ブレーキ装置18の操作量を検出する。
【0026】
路車間通信装置32は、道路側に設けられたインフラシステム1−2(図3参照)との間で通信を行うものである。車車間通信装置33は、他車両との通信を行うものである。各センサ29,30,31の検出結果を示す信号は、ECU20に出力される。また、ECU20は、各通信装置32,33と接続されており、通信装置32,33のそれぞれと信号を授受する。
【0027】
ECU20は、変速マップを有しており、スロットル開度、車速などに基づいて、自動変速機13の変速段を決定し、この決定された変速段を成立させるようにA/T油圧制御装置17を制御することができる。
【0028】
ナビゲーション装置50は、自車両を所定の目的地に誘導することを基本的な機能としており、ECU60と、操作部51と、表示部52と、スピーカ53と、位置検出部54と、地図データベース55と、運転履歴記録部56とを備えている。ナビゲーション装置50のECU60は、ECU20と双方向の通信が可能である。
【0029】
ECU60のCPU61は、入力された情報に基づいて、ナビゲーション処理等の各種演算処理を行う。ECU60のROM62には、目的地までの経路の検索、経路中の走行案内等を行うための各種プログラムが格納されている。RAM63は、読み書き可能なメモリである。
【0030】
位置検出部54は、GPSレシーバ、地磁気センサ、距離センサ、ビーコンセンサ、及びジャイロセンサを備えている。位置検出部54は、自車の位置を検出し、その検出した自車の位置を示すデータをECU60に出力する。
【0031】
地図データベース55には、車両の走行に必要な情報(地図、直線路、カーブ、登降坂、高速道路、サグ、トンネルなど)が記憶されている。地図データベース55は、地図データファイル、交差点データファイル、ノードデータファイル、道路データファイルを備えている。ECU60は、地図データベース55を参照して、必要な情報を読み出す。本実施形態の車両制御システム1−1は、ECU20、路車間通信装置32、車車間通信装置33、A/T油圧制御装置17、ブレーキ油圧制御装置18、ナビゲーション装置50を備える。
【0032】
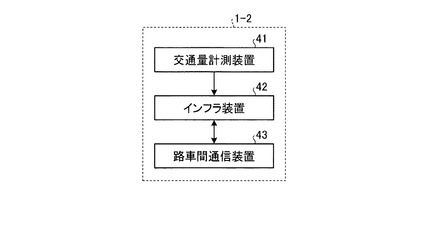
図3に示すインフラシステム1−2は、交通基盤としての道路側に設置されたシステムである。インフラシステム1−2は、協調交通流制御にかかる情報を道路上の各車両に送信する。インフラシステム1−2は、交通量計測装置41、インフラ装置42および路車間通信装置43を有する。交通量計測装置41は、道路を走行する車両の交通量を計測するものである。交通量計測装置41は、道路の各車線における単位時間あたりの通過台数を計測して道路の交通量を計測する。例えば、一つの進行方向について走行車線および追越車線をそれぞれ1車線備えた高速道路では、交通量計測装置41は、走行車線および追越車線のそれぞれにおいて単位時間あたりの通過台数を計測して、各車線の交通量および高速道路全体の交通量を計測する。
【0033】
インフラ装置42は、交通量計測装置41によって計測された交通量を取得し、路車間通信装置43を介して交通量を送信する。路車間通信装置43は、インフラシステム1−2と車両制御システム1−1との間で双方向の通信を行う通信装置である。路車間通信装置43は、車両制御システム1−1の路車間通信装置32から送信される信号を受信する。また、路車間通信装置43が送信した信号は、車両制御システム1−1の路車間通信装置32によって受信される。
【0034】
本実施形態の車両1では、ECU20により、他車両との車車間通信や路車間通信によって取得した、道路上の車両の走行状態に関する情報に基づいて車両制御が行われる。道路上の車両の走行状態に関する情報とは、道路上の個々の車両の走行状態に関する情報や、道路上の一定の領域における走行状態に関する情報を含むものである。例えば、個々の車両における現在位置、進行方向(方位)、走行速度、走行加速度、ジャーク、車間距離、車間時間等や、これらの目標値は道路上の車両の走行状態に関する情報に含まれる。また、道路上の交通量や、平均走行速度、交通流状況等は道路上の車両の走行状態に関する情報に含まれる。
【0035】
道路上の車両の走行状態に関する情報に基づく車両制御として、例えば、ECU20は、通信によって取得した周辺交通流状況から、全体をスムーズに流す「あるべき速度」を生成し、そのあるべき速度との相対速度を0にするようにスムーズに自車両を制御する。また、ECU20は、自車両の前方の渋滞に基づいて「あるべき速度」を生成することもできる。このように、道路上の車両の走行状態に関する情報に基づいて、全体をスムーズに流すことができる共通速度や渋滞の状況に応じた速度を目標速度とするなど、道路上の他車両と協調して自車両を走行させる制御を本実施形態では「協調交通流制御」と記載する。
【0036】
車車間通信では、識別情報、走行情報、制御目標量情報、ドライバ操作情報、車両スペック情報、通信規格情報、環境情報を含む各種情報が他車両に向けて送信される。識別情報は、送信元の車両IDや送信元車両が所属する車群のIDを含む。走行情報は、現在位置、進行方向(方位)、走行速度、走行加速度、ジャーク、車間距離、車間時間等の自車両の走行に関する測定値情報である。制御目標量情報は、車載機器が車両1を制御する際の目標値・入力値・制御指令値等であって、目標速度、目標加速度、目標ジャーク、目標方向(方位)、目標車間時間、目標車間距離を含む。
【0037】
ドライバ操作情報は、運転者から入力操作された操作量や入力情報であって、アクセル操作量、ブレーキ操作量(踏力やストローク)、ウィンカ操作(操作の有無や操作方向)、舵角、ブレーキランプのON/OFF等を含む。車両スペック情報は、車重、最大ブレーキ力、最大加速力、最大ジャーク、各アクチュエータ(ブレーキ、アクセル、シフト等)の反応速度や時定数を含む。通信規格情報は、予め決められたルールに基づくものであって、挨拶情報や転送情報を示すフラグなどを含む。環境情報は、走行環境に関する情報であって、路面情報(例えばμ、勾配、温度、ウェット/ドライ/凍結、アスファルト/未舗装)、風速や風向などの情報を含む。
【0038】
なお、本実施形態では、車両1のECU20が「あるべき速度」を実現するように車両1の速度や加速度等を自動制御する場合を例に説明するが、協調交通流制御は、これに限定されるものではない。協調交通流制御は、「あるべき速度」を実現するように車両1の速度や加速度等を自動制御するものだけでなく、「あるべき速度」で車両1を走行させるように運転者を誘導するものも含む。すなわち、協調交通流制御は、共通の「あるべき速度」を目標速度とするなど複数の車両が協調して走行する状態を実現するためのものであって、加速度や速度、車間等の走行状態の制御は自動であるか手動であるかを問わない。
【0039】
運転者を誘導する手段としては、例えば、道路全体をスムーズに流すために好ましい目標速度として「あるべき速度」を運転者に対して表示するHMI(Human Machine Interface)装置が挙げられる。例えば、インストルメントパネル等に好ましい走行速度を表示する表示装置が設けられてもよい。この場合、ECU20が行う協調交通流制御は、「あるべき速度」で車両1を走行させることができるように、その速度を表示装置に表示させることで運転者をアシストすることである。本実施形態では、協調交通流制御を実行可能な車両制御システム1−1が搭載された車両を「システム搭載車両」と記載する。また、他の車両との関係を記述する場合など、車両1を「自車両1」とも記載する。
【0040】
本実施形態の車両1は、ACC(Adaptive Cruise Control)制御を実行可能である。ACC制御では、レーダー等により先行車を検出し、先行車に合わせ一定の車間距離を保つように追従走行する追従制御、および、車両1の車速が一定車速となるように車両1を走行させる定速走行制御を実行可能である。ACC制御による車両制御は、例えば、ECU20によって実行される。
【0041】
図2に示すように、車両1は、ACCコントロールスイッチ34を備えている。ACCコントロールスイッチ34は、運転者がACC制御の各種操作を行うためのものである。運転者は、ACCコントロールスイッチ34によって、ACC制御のON/OFF、設定車速の入力、追従走行における所定距離の入力等を行うことができる。
【0042】
定速走行制御では、運転者により入力された設定車速を目標速度として車速が自動制御される。ECU20は、例えば、ACC制御の実行中に先行車が存在しない場合、設定車速を維持して走行するように車両1の走行制御を行う。また、ECU20は、設定車速よりも低速で走行する先行車が検出されている場合、その先行車との車間距離を予め入力された所定距離に保つように追従制御を行う。ECU20は、車間距離センサ30の検出結果に基づいて、自車両と同一の車線上の先行車を検出することができる。ECU20は、その先行車との車間距離が所定距離よりも小さくならないように車両1の車速や加速度を制御する。従って、ECU20は、先行車の車速が設定車速よりも低速である場合、自車両の車速を低下させて車間距離を保つようにする。
【0043】
本実施形態の車両1は、協調交通流制御を実行することで、渋滞の発生等を抑制することができる。高速道路等での渋滞の発生は、人間の認知能力・判断能力・操作能力の限界が原因の一つである。例えば、運転者には、直前車しか見えなかったり、道路勾配の変化を認知しにくかったり錯覚したりするという認知能力の限界や、交通流全体を見て判断することができないという判断能力の限界、直前車の動きに合わせて直前車よりも遅れて操作するという操作能力の限界がある。このため、先頭車両が減速した場合に、速度の低下が増幅しながら後続車両に伝播する減速ショックウェーブによって渋滞が発生することがある。
【0044】
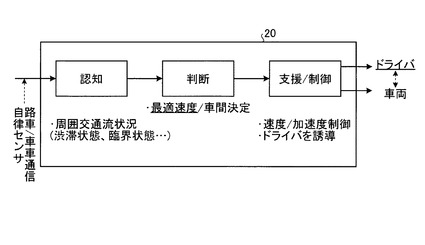
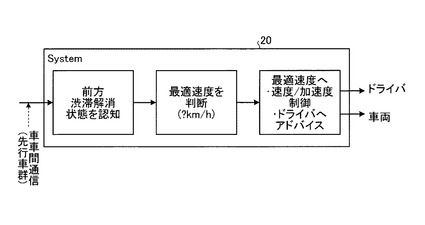
本実施形態では、ECU20が協調交通流制御の「あるべき速度」を生成し、その速度を目標速度として車両1を制御する機能を有する。図4および図5は、ECU20が有する機能について説明するための図である。図4に示すように、ECU20は、周囲の交通流状況を認知する機能、最適速度等を判断する機能、および車両1を制御する機能を有する。なお、ECU20は、車両1を制御する機能に代えて、または加えて、運転者を誘導する支援機能を有していてもよい。
【0045】
認知する機能とは、例えば、人間や車間距離センサ30のような自律センサには見えないこれからの交通状況、例えば、視認できない前方の交通状況を認知するものである。ECU20は、路車間通信や車車間通信により取得した情報に基づいて、周囲の交通流状況を認知する。ここで、周囲の交通流状況とは、自車両が走行している道路上を自車両と同方向に走行する車両の走行状態に関する情報である。周囲とは、例えば、自車両が走行する道路における自車両の周囲であり、自車両が走行する車線や、進行方向が同じであって自車両と異なる車線も含むものである。また、周囲とは、自車両の前方や側方を含むものであり、更に自車両の後方を含むものであってもよい。
【0046】
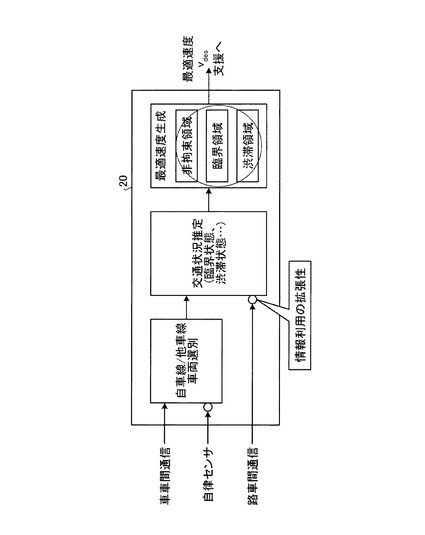
図5に示すように、ECU20は、自車線の車両と他車線の車両とを選別することができる。例えば、システム搭載車両から送信された車両位置情報に基づいて、そのシステム搭載車両が自車線と同じ車線を走行しているか、他車線を走行しているかを判別することができる。ECU20は、例えば、ナビゲーション装置50から取得した道路の各車線に関する位置情報および自車両の位置情報と、他のシステム搭載車両の位置情報とに基づいて、自車両と他のシステム搭載車両とが同じ車線上にあるか否かを判断することができる。
【0047】
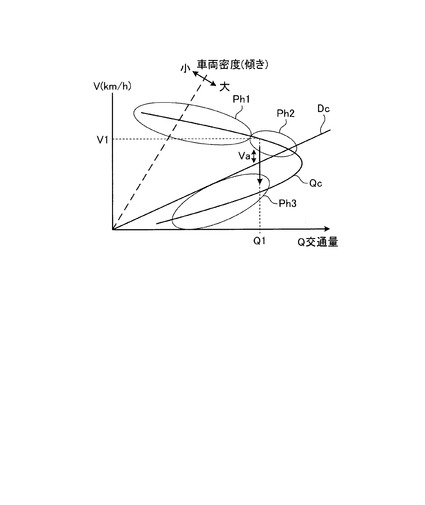
交通流状況とは、道路上の各車両の走行状態や、道路上の車両の流れの状態を含むものである。車両の流れの状態は、例えば、渋滞状態、臨界状態等として認知される。渋滞状態や臨界状態は、例えば、車速および交通量に基づいて判断することができる。例えば、車車間通信によって取得した自車両の前方を走行中のシステム搭載車両の車速と、路車間通信によってインフラ装置42から取得した交通量とに基づいて、自車両の前方の交通流状況が、渋滞状態や臨界状態であるかを判断することができる。図6は、渋滞状態および臨界状態の判断方法の一例について説明するための図である。図6において、横軸は交通量Q、縦軸は平均車速Vを示す。交通量Qとは、車線毎の単位時間あたりの通過台数(台/時間・車線)である。つまり、図6には、走行速度と道路を通行可能な交通量との関係が示されている。図6において原点を通る直線の傾きは、道路上の車両密度を示す。車両密度は、交通量Qの増加や平均車速Vの減少によって増加し、交通量Qの減少や平均車速Vの増加によって減少する。また、符号Dcは、臨界密度を示す。車両密度が臨界密度Dcを超えると、渋滞状態に移行しやすい。
【0048】
符号Qcは、最大交通量線を示す。最大交通量線Qcは、各平均車速Vと道路を通行可能な最大交通量との関係を示している。最大交通量線Qcは、人間が車両を走行させるときの平均的な車間時間特性に対応している。符号Ph1は自由相、Ph2は臨界相、Ph3は渋滞相をそれぞれ示す。自由相Ph1は、最大交通量線Qcにおける車両密度が小さな範囲に対応する。臨界相Ph2は、最大交通量線Qcにおいて自由相Ph1よりも車両密度が大きな範囲であって、臨界密度Dcの近傍および臨界密度Dcよりも車両密度が小さな範囲に対応する。渋滞相Ph3は、最大交通量線Qcにおいて臨界密度Dcよりも車両密度が大きな範囲に対応する。
【0049】
車両密度が臨界密度Dcを超えると一様な流れが不安定になり、わずかな速度の揺らぎが、車両の進行方向とは逆向きに成長しながら伝わり(減速ショックウェーブ)、渋滞相Ph3へ一気に変化(相転移)する。例えば、平均車速がV1で交通量がQ1である状態は、臨界相Ph2にある状態、すなわち臨界状態であり、この臨界状態にある場合、外乱や更なる交通量の増加によって車両密度が臨界密度Dcを超えやすく、渋滞状態に移行しやすい。例えば、サグ等において速度低下が後続車両に伝播するショックウェーブが発生すると、相転移によって渋滞状態に移行しやすい。
【0050】
ECU20の判断する機能とは、交通流がスムーズに流れる速度や車間を判断し決定する機能である。例えば、現在の車速よりも低い車速で各車両を走行させることで、交通流状況を臨界状態に至らせないことや臨界状態を解消することができる場合がある。これとは逆に、現在の車速よりも高い車速で各車両を走行させることで、臨界状態に至らせないことや臨界状態を解消することができる場合がある。ECU20は、例えば、取得した交通量において臨界状態とならないスムーズに流れる速度の範囲で最適速度を決定する。
【0051】
例えば、取得した交通量がQ1である場合、臨界状態とならず、かつ限界密度Dcを超えない速度の範囲Vaで最適速度を決定することができる。この場合、臨界状態とならず、かつ限界密度Dcを超えない速度の範囲Vaで現在の交通流の平均車速に最も近い車速やその近傍の車速を最適速度としてもよい。あるいは、上記の速度の範囲Vaにおける最大車速や最大車速以下でかつ最大車速の近傍の車速を最適速度としてもよい。また、車群の安定性を重視する観点からは、上記の速度の範囲Vaにおける中間値を最適速度としてもよい。このように臨界状態とならず、かつ限界密度Dcを超えない速度の範囲Vaで決定された最適速度は、道路における渋滞の発生を抑制可能な速度である。なお、最適速度の選択範囲とする速度の範囲Vaは、これに限定されるものではない。例えば、速度の範囲Vaの最大値は、速度V1よりも小さな速度であればよい。また、速度の範囲Vaの最小値は、交通量Q1と最大交通量線Qcとの2つの交点のうち低車速側の交点の速度以上であればよく、渋滞相Ph3の速度よりも大きな速度であることが好ましい。
【0052】
なお、各車両制御システム1−1において、取得した交通量と決定する最適速度との対応関係は同一や同様であることが望ましい。たとえば、異なるメーカーの車両同士であっても、インフラシステム1−2から同一の交通量を取得した場合に最適速度が同一の車速や近似の車速となることが好ましい。
【0053】
ECU20は、決定した最適速度および車間を目標速度および目標車間として、車両1の速度および加速度を制御する。ECU20は、例えば、下記式(1)によって目標とする加速度を算出する。
acooperate=ka・ades+kv・(vdes−v)+kd・(ddes−d)…(1)
ここで、acooperateは協調交通流制御の要求加速度、adesはあるべき加速度、vdesはあるべき速度、vは現在の車速、ddesはあるべき車間、dは現在の車間、ka、kvおよびkdは予め定められた係数(ゲイン)である。係数kaは、例えば1とすることができる。以下の説明では、協調交通流制御の要求加速度を単に「協調要求加速度」とも記載する。
【0054】
あるべき加速度adesは、最適な加速度であって、例えば、自車両1の前方の車両の走行状態に関する情報に基づく。あるべき加速度adesは、例えば、車車間通信によって取得した自車両の前方を走行しているシステム搭載車両の目標加速度(前方車両加速度目標値)とすることができる。前方のシステム搭載車両の目標加速度は、運転者の運転操作に基づくドライバ要求加速度であっても、協調要求加速度等の車両側のシステムの要求加速度であってもよい。このようにすれば、前方のシステム搭載車両の加減速と同期して自車両の加減速を行うフィードフォワード制御とすることができる。その結果、後に図7および図8を参照して説明するように、前方から伝播してくる減速ショックウェーブ等を自車両で吸収して途絶えさせることが可能となる。あるべき速度vdesは、ECU20が決定した最適速度である。あるべき車間ddesは、ECU20が決定した車間である。あるべき車間ddesは、自車両の前方の車両の走行状態に関する情報、例えば前方の車両の速度等に基づいて算出される。なお、車間とは、車間距離あるいは車間時間等の自車両1の直前の先行車との相対関係である。上記式(1)において、右辺第2項および第3項は、フィードバック制御量である。
【0055】
係数ka、kvおよびkdは、実験やシミュレーションの結果に基づいて予め定められている。係数ka、kvおよびkdは、例えば、道路上の車群の安定性の向上や、車両1の乗り心地等を考慮して決定される。なお、車群の安定性とは、例えば、先頭の車両が減速して後続車両に減速が伝播していくときの車間距離の減少量の伝播比で示される。この伝播比が1を超えると後方の車両ほど車間距離が詰まって減速ショックウェーブが発生する。
【0056】
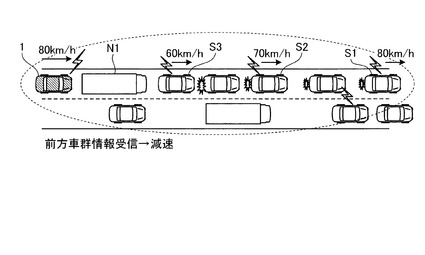
図7は、高速道路において減速ショックウェーブが発生した状態を示す図、図8は、減速ショックウェーブ発生時の車両制御について説明するための図である。なお、協調交通流制御は、高速道路に限らず、他の道路で実行されてもよい。図7において、符号S1,S2,S3は、自車線における自車両1の前方を走行するシステム搭載車両を示す。システム搭載車両S1からS3において、システム搭載車両S1は最も前方を走行しており、システム搭載車両S3は最も後方を走行している。減速ショックウェーブの発生により、後方の車両ほど速度低下幅が増幅している。前方のシステム搭載車両S1の速度80km/hに対して、2台目のシステム搭載車両S2の速度は70km/h、3台目のシステム搭載車両S3の速度は60km/hまで低下している。減速ショックウェーブは自車両1まで到達しておらず、自車両1は、時速80km/hで走行している。
【0057】
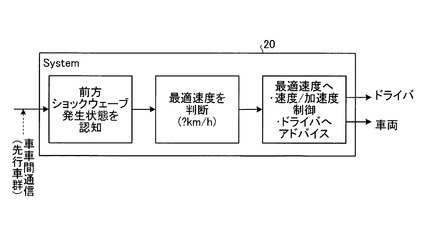
図8に示すように、ECU20は、車車間通信によって各システム搭載車両S1,S2,S3の現在車速を取得し、減速ショックウェーブを認知する。なお、ECU20は、車速だけでなく、各システム搭載車両S1,S2,S3の制動状態や先行車との車間距離の情報に基づいて減速ショックウェーブを認知するようにしてもよい。このように前方のシステム搭載車両から送信される情報に基づいて減速ショックウェーブの発生を認識することで、減速ショックウェーブが自車両1に到達する前に自車両1の減速を開始することができる。ECU20は、自車両1の前方が減速ショックウェーブ状態であると判断すると、最適速度を判断する。最適速度は、例えば、自車線の先行車群の平均速度(70km/h)あるいは最低速度(60km/h)とされる。ECU20は、先行車群から取得した情報に基づいてあるべき加速度およびあるべき車間を決定する。そして、ECU20は、あるべき速度、加速度および車間に基づき、上記式(1)から協調交通流制御の要求加速度を算出して、この要求加速度を目標加速度として車両1を制御する。
【0058】
このように通信によって前方の減速ショックウェーブを認知できることで、例えば、自車両1の直前をシステム搭載車両ではない大型の先行車N1が走行しており、前方を視認できないような場合であっても、減速ショックウェーブの接近を知ることができる。ECU20は、減速ショックウェーブが自車両1に到達する前に自車両1を減速させることができる。例えば、先行車N1が減速を開始する前に自車両1の減速が開始されることで、先行車N1との車間距離を十分に確保し、減速ショックウェーブによる車間の詰りを抑制することが可能となる。このように、前方のシステム搭載車両に対する自車両1の相対速度制御が、減衰として働き、減速ショックウェーブを素早く吸収することができる。
【0059】
図9は、高速道路において自車両の前方に渋滞が発生した状態を示す図、図10は、渋滞接近時の車両制御について説明するための図である。図9において、符号S4,S5は、自車線における自車両1の前方を走行するシステム搭載車両を示す。システム搭載車両S4,S5は、渋滞の車群内にあり、システム搭載車両S5は、渋滞の最後尾車両となっている。システム搭載車両S4,S5は、それぞれ時速10km/hで走行している。自車両1からは渋滞が直接見えず、自車両1は時速100km/hで走行している。
【0060】
図10に示すように、自車両1のECU20は、車車間通信によって前方のシステム搭載車両S4,S5から取得した情報に基づいて、自車線における前方が渋滞状態であることを認知する。ECU20は、前方が渋滞状態であることを認知すると、自車線先行車群の速度からあるべき速度を生成する。生成される最適速度は、例えば、先行車群の平均速度(10km/h)あるいは最低速度(10km/h)とすることができる。つまり、目標速度は、自車両の前方を走行する車両(S4,S5)の速度である前方車両速度に基づいて決定される。また、ECU20は、先行車群から取得した情報に基づいてあるべき加速度およびあるべき車間を決定する。そして、ECU20は、あるべき速度、加速度および車間に基づき、上記式(1)から協調要求加速度を算出して、この要求加速度を目標加速度として車両1を制御する。
【0061】
このように前方の渋滞状態をいち早く認知してあるべき速度(前方渋滞速度)に早めの減速を行うことができることで、あるべき速度にスムーズに近づけることができる。例えば、渋滞の最後尾車両であるシステム搭載車両S5が車間距離センサ30の検出範囲30aに入る前の段階で自車両1の減速を開始することができる。これにより、急制動がなされることを抑制して渋滞末尾に対してスムーズに減速制御を開始することができる。
【0062】
また、カーブの先など、自車両1からの見通しがきかない位置に渋滞が発生している場合であっても、ECU20はいち早く渋滞状態を認知して減速を行うことができる。
【0063】
ここで、本実施形態の車両1のように協調交通流制御を実行可能なシステムと、ACC制御を実行可能なシステムとを備える車両では、複数の要求加速度の調停が必要となる。本実施形態では、要求加速度の最小値をとることで複数の要求加速度の調停を行う。ECU20は、下記式(2)によって、自車両1に要求する加速度を算出する。
areq=min(aacc,acooperate,・・・)…(2)
ここで、areqは自車要求加速度、aaccはACC制御の要求加速度である。以下の説明では、ACC制御の要求加速度aaccを単に「ACC要求加速度aacc」とも記載する。
【0064】
ACC要求加速度aaccは、ACC制御において、設定車速や直前の先行車との車間距離等に基づいて要求される加速度である。例えば、車間距離センサ30によって検出される先行車が存在しない場合、ACC要求加速度aaccは、設定車速と現在車速との速度差を0とできるように算出される。また、車間距離センサ30によって先行車が検出されており、かつその先行車の速度が設定車速を下回る場合、ACC要求加速度aaccは、先行車との実際の車間距離と予め定められた所定距離との差を0とできるように算出される。例えば、先行車との車間距離が詰まりすぎた場合には、ACC要求加速度aaccは、負の加速度として算出される。
【0065】
ECU20は、要求加速度としてACC要求加速度aaccと協調要求加速度acooperateの2種類の要求加速度から自車要求加速度areqを選択する場合、これらのミニマムセレクトによって要求加速度を調停する。これにより、自車要求加速度areqを適切に決定することができる。ACC要求加速度aaccが協調要求加速度acooperateよりも小さな加速度である場合とは、例えば、先行車との接近によりACC要求加速度aaccとして負の加速度が要求される場合である。このような場合に、自車要求加速度areqとしてミニマムセレクトによってACC要求加速度aaccが選択されることで、先行車との車間距離を適切に保つことができる。また、運転者が入力した設定車速へ追従するためのACC要求加速度aaccも調停対象となるため、協調要求加速度acooperateが運転者の設定車速以上に加速させてしまうことが規制される。
【0066】
一方、協調要求加速度acooperateがACC要求加速度aaccよりも小さな加速度である場合に、自車要求加速度areqとして協調要求加速度acooperateが選択されることで、全体をスムーズに流すことができる最適速度を超えて自車両1を加速させること等が抑制される。
【0067】
図11は、高速道路において前方の渋滞が解消された状態を示す図、図12は、前方の渋滞が解消されたときの車両制御について説明するための図である。図11において、符号S6,S7は、自車線における自車両1の前方を走行するシステム搭載車両を示す。また、符号N2は、自車両1の直前を走行する先行車を示す。先行車N2は、システム搭載車両ではない一般車両である。自車両前方のシステム搭載車両のうち前方を走るシステム搭載車両S6は、渋滞が解消されて速度50km/hまで加速し、後方のシステム搭載車両S7は、速度30km/hまで加速している。自車両1は、速度10km/hで走行している。ECU20は、自車両の前方のシステム搭載車両の速度に基づいて、前方の渋滞解消を認知することができる。例えば、より前方を走行するシステム搭載車両ほど高車速となっていることで渋滞解消を認知することができる。協調交通流制御では、先行車群のシステム搭載車両S6,S7に合わせて加速を要求する。例えば、自車両1の直前のシステム搭載車両S7の速度および加速度をあるべき速度および加速度として協調要求加速度acooperateが算出される。これにより、ECU20は、前方の渋滞解消状態をいち早く認知し、あるべき速度(前方の流れている速度)にスムーズに近づけるよう早めの加速支援を行うことができる。
【0068】
一方で、ACC制御では、先行車N2に合わせてACC要求加速度aaccが算出される。例えば、先行車N2と自車両1との車間距離が所定距離よりも小さい場合には、ACC要求加速度aaccは減速を要求する値となる。この場合、最小値調停されて、ACC要求加速度aaccが自車要求加速度areqとして採用される。また、先行車N2が十分に加速して、自車両1と先行車N2との車間が開くと、協調要求加速度acooperateが自車要求加速度areqとして採用される。協調要求加速度acooperateに基づいて積極的に自車両1を加速させることにより、渋滞を早期解消できるという利点がある。
【0069】
なお、ACC要求加速度aaccが先行車N2との車間に基づき算出された要求加速度である場合に限り、ACC要求加速度aaccと協調要求加速度acooperateとで最小値調停を行うようにしてもよい。言い換えると、先行車に対する追従制御が行われている場合に限りACC要求加速度aaccと協調要求加速度acooperateとの最小値を自車要求加速度areqとするようにしてもよい。このようにした場合、ACC制御において設定車速を目標の速度とする定速走行制御がなされている場合には、ACC要求加速度aaccと協調要求加速度acooperateとの調停はミニマムセレクトとは異なるものとされてもよい。例えば、協調要求加速度acooperateが優先して採用される調停がなされてもよい。
【0070】
ここで、調停の結果協調要求加速度acooperateが自車要求加速度areqとして採用される場合、車速がACC制御の設定車速を超える場合がある。協調交通流制御における「あるべき速度」が、運転者の所望する速度である設定車速を上回る場合などである。設定車速を上回る速度でクルーズコントロールがなされると、運転者が違和感を覚える可能性がある。このため、設定車速が入力されている場合であって、加速度の制御によって設定車速を超える車速で車両1を走行させようとする場合、予め運転者に設定車速を超える車速で走行させることについての許可を得ることが好ましい。例えば、協調交通流制御の最適速度が設定車速を上回る速度であることを表示装置等における表示や音声案内等によって運転者に伝え、最適速度で車両1を走行させることの許可を求めるようにすればよい。運転者が許可または不許可を入力する手段は、スイッチ等に対する操作とすることができる。このように運転者の許可を得ることで、ドライバ主権のもとで全体の交通流を最適にできる速度で車両1を走行させることができる。
【0071】
このように、本実施形態の車両制御システム1−1によれば、ACC要求加速度aaccと協調要求加速度acooperateとのミニマムセレクトがなされることによって最適な自車要求加速度areqを選択することができる。なお、調停対象の要求加速度として、ACC要求加速度aaccおよび協調要求加速度acooperateに加えて他の要求加速度が存在する場合に、それらの要求加速度のミニマムセレクトによって自車要求加速度areqを決定するようにしてもよい。例えば、プリクラッシュセーフティ(PCS:Pre-Crash Safety)システムにおいて自動的な制動操作を要求する要求加速度(以下、単に「PCS要求加速度」と記載する。)apcsが車両1に対して要求されている場合である。PCS要求加速度apcsは、自車両1の直前を走行する先行車や自車両の前方の障害物と自車両1との相対関係に基づいて要求される。つまり、PCS要求加速度apcsは、第二の要求加速度に対応している。ここで、先行車との相対関係とは、車間距離や車間時間等であり、障害物との相対関係とは、障害物との相対距離や障害物までの到達時間等である。PCS要求加速度apcsが要求された場合に、ACC要求加速度aacc、協調要求加速度acooperateおよびPCS要求加速度apcsの最小値が自車要求加速度areqとして採用されるようにしてもよい。
【0072】
ACC制御が実行されていない場合や、ACC制御システムが車両1に搭載されていない場合であって、協調要求加速度acooperateとPCS要求加速度apcsから自車要求加速度areqを選択するときには、協調要求加速度acooperateとPCS要求加速度apcsの最小値を採用するようにすればよい。
【0073】
このようにして、自律システム(ACC制御、PCSシステム)によって先行車や障害物と自車両との相対関係に基づいて要求されたACC要求加速度aaccやPCS要求加速度apcs、および協調交通流制御によって道路上の車両の走行状態に関する情報に基づいて要求された協調要求加速度acooperateの最小値が選択されることで、自車要求加速度areqを適切に決定し、車両1の制御における制御目標を適切なものとすることができる。
【0074】
なお、自律システムとは、例えば、自律的に要求加速度を決定するシステムである。自律的に決定するとは、例えば、道路上の車両、例えば自車両および直前の車両を除く車両の走行状態に関する情報に基づくことなく要求加速度を決定することである。例えば、ACC要求加速度aaccは、追従走行制御であれば自車両と先行車との相対関係(車間距離や車間時間等)に基づいて決定されるものであり、定速走行制御であれば運転者の設定した設定車速に基づいて決定されるものであるから、直前の先行車を除く他の車両の走行状態に関する情報に基づいて決定される要求加速度ではなく、自律的に決定される要求加速度である。同様に、PCS要求加速度apcsは、直前の先行車を除く他の車両の走行状態に関する情報に基づいて決定される要求加速度ではなく、自律的に決定される要求加速度である。
【0075】
一方、協調交通流制御では、周辺交通流状況に基づく「あるべき速度、加速度、車間」などに基づいて要求加速度が決定される。「あるべき速度」は、例えば、他車両と共通の目標速度であったり、車間距離センサ30では検出できない前方のシステム搭載車両の車速に基づく最適速度であったりする。つまり、協調交通流制御は、他車両と共通の制御目標に基づいて各車両の要求加速度が決定されたり、自律センサでは検出できない他車両の走行状態に関する情報に基づいて要求加速度が決定されたりする協調制御となっている。本実施形態では、この協調制御は、通信を介して取得した道路上の車両の走行状態に関する情報に基づいて実行されものである。
【0076】
なお、自律システムは、ACC制御およびPCSシステムには限定されない。先行車や障害物と自車両との相対関係に基づいて要求加速度を決定する他のシステムによる要求加速度が、最小値を選択する調停の対象とする要求加速度として含まれてもよい。
【0077】
また、調停対象とする要求加速度として、「先行車や障害物と自車両との相対関係に基づいて要求加速度を決定するシステム」以外の自律システムの要求加速度が含まれていてもよい。例えば、自車両1の前方のカーブや道路勾配、料金所等の走行環境に基づく要求加速度が調停対象に含まれてもよい。また、自律システムの要求加速度や協調制御システムの要求加速度を含む全ての要求加速度を調停対象としてそれらの最小値を自車要求加速度areqとして採用するようにしてもよい。要求加速度を調停して速度変化の仕方を制御することで、燃費や乗り心地の向上等を図ることができる。また、複数の要求加速度の最小値が選択されることで、より減速側の支援が行われ、車間距離の確保等が可能となる。
【0078】
なお、運転者のアクセル操作やブレーキ操作等の運転操作に基づく要求加速度であるドライバ要求加速度は、他の全ての要求加速度よりも優先される。すなわち、ドライバ要求加速度を入力する運転者の操作があった場合、他の要求加速度に代えてドライバ要求加速度に基づく車両制御がなされる。
【0079】
なお、ECU20によって、要求加速度の調停だけでなく、複数の要求速度の調停がなされてもよい。例えば、複数の要求速度の最小値を目標速度として選択するようにしてもよい。
【0080】
本実施形態では、「あるべき速度」としての最適速度が、各システム搭載車両において決定されたがこれには限定されない。例えば、最適速度は、インフラシステム1−2によって決定されてもよい。この場合、インフラシステム1−2は、例えば、交通量計測装置41によって計測された交通量や、車車間通信によって各システム搭載車両から取得した情報に基づいて最適速度を決定することができる。インフラシステム1−2は、臨界状態となることを抑制できる速度を各システム搭載車両に共通の最適速度として路車間通信により送信してもよい。また、インフラシステム1−2は、システム搭載車両から取得した情報に基づいて渋滞の発生を認知した場合には、渋滞よりも後方のシステム搭載車両、すなわち渋滞に接近しているシステム搭載車両に対して渋滞箇所の速度に基づく最適速度を送信してもよい。また、インフラシステム1−2は、渋滞の解消を認知した場合には、渋滞の車群中にあるシステム搭載車両に対して、渋滞から離脱したシステム搭載車両の速度に基づく最適速度を送信してもよい。
【0081】
また、本実施形態では、車両制御システム1−1は、道路側のインフラシステム1−2から交通量に関する情報を取得したが、交通量に関する情報の取得方法はこれには限定されない。例えば、各システム搭載車両は、自車両1が検出した近傍の交通量や、他のシステム搭載車両が検出した近傍の交通量に基づいて、周囲の交通流状況を認知することができる。各システム搭載車両の近傍の交通量は、例えば、レーダー等のセンサによって近傍を走行する車両数や各車両との相対位置を検出したり、カメラ等によって撮像された自車両1の周囲の画像データに基づいて近傍を走行する車両数や各車両との相対位置を検出したりすることによって検出可能である。このように取得した近傍の交通量を各システム搭載車両が車車間通信を介して共有することで、車車間通信が可能な範囲内における交通流状況を認知するようにすれば、インフラシステム1−2を省略して協調交通流制御を実行することや、インフラシステム1−2との通信範囲外のエリアにおいても協調交通流制御を実行することが可能となる。
【0082】
また、システム搭載車両は、他のシステム搭載車両と相互に通信するだけでなく、他のシステム搭載車両間の通信を中継したり、インフラシステム1−2と他のシステム搭載車両との路車間通信を中継したりしてもよい。このようにすれば、距離の離れたシステム搭載車両同士の通信やインフラシステム1−2から離れた位置を走行するシステム搭載車両とインフラシステム1−2との路車間通信を円滑に行わせることができる。また、山間部を走る道路など、路車間通信や車車間通信の通信可能な範囲が狭くなりやすい道路であっても、広範囲で協調交通流制御を実行できる。同様にして、インフラシステム1−2は、システム搭載車両と相互に通信するだけでなく、システム搭載車両同士の車車間通信を中継するようにしてもよい。また、路車間通信や車車間通信を中継する中継局や中継車が設けられてもよい。
【0083】
また、インフラシステム1−2は、交通量に関する情報だけでなく、他の道路交通に関する情報を路車間通信により送信してもよい。道路交通に関する情報とは、例えば、交通情報を提供するセンターから取得した、交通情報、通行規制や速度規制等の規制に関する情報、路面状況に関する情報等である。
【産業上の利用可能性】
【0084】
以上のように、本発明にかかる車両制御システムは、車両の制御における目標を適切なものとするのに適している。
【符号の説明】
【0085】
1−1 車両制御システム
1−2 インフラシステム
1 車両
20 ECU
30 車間距離センサ
32 路車間通信装置
33 車車間通信装置
50 ナビゲーション装置
areq 自車要求加速度
aacc ACC要求加速度
acooperate 協調要求加速度
【技術分野】
【0001】
本発明は、車両制御システムに関する。
【背景技術】
【0002】
従来、目標車速に基づき自車の走行を制御する技術が知られている。例えば、特許文献1には、クルーズコントロール車速および自車走行レーンにおける制限車速のうち小さい車速を目標車速として自車の走行を制御する車両用走行制御システムの技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−208661号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
車両の制御における目標を適切なものとすることについて、なお検討の余地がある。例えば、目標車速を実現するまでの過程も考慮することが望ましい。また、道路の交通状況や先行車との関係等によって適切な制御の態様が異なることが考えられる。
【0005】
本発明の目的は、車両の制御における制御目標を適切なものとすることができる車両制御システムを提供することである。
【課題を解決するための手段】
【0006】
本発明の車両制御システムは、道路上の車両の走行状態に関する情報に基づいて要求される第一の要求加速度および自車両の直前を走行する先行車あるいは自車両の前方の障害物の少なくともいずれか一方と自車両との相対関係に基づいて要求される第二の要求加速度から目標加速度を選択する場合、前記第一の要求加速度および前記第二の要求加速度のうち最小の加速度を前記目標加速度として自車両の加速度を制御することを特徴とする。
【0007】
上記車両制御システムにおいて、前記第一の要求加速度は、前記走行状態に関する情報に基づく目標速度に基づいて算出されることが好ましい。
【0008】
上記車両制御システムにおいて、前記走行状態に関する情報は、自車両の前方を走行する車両の速度である前方車両速度を含むものであって、前記目標速度は、前記前方車両速度に基づいて決定されることが好ましい。
【0009】
上記車両制御システムにおいて、前記目標速度は、前記道路における渋滞の発生を抑制可能な速度であることが好ましい。
【0010】
上記車両制御システムにおいて、前記走行状態に関する情報は、前記道路の交通量を含むものであって、前記目標速度は、走行速度と前記道路を通行可能な交通量との関係に基づいて算出されることが好ましい。
【0011】
上記車両制御システムにおいて、運転者が所望する車速である設定車速が入力されており、かつ前記目標速度が前記設定車速を超えている場合であって、前記加速度の制御によって前記設定車速を超える車速で自車両を走行させようとする場合、予め前記運転者に前記設定車速を超える車速で走行させることについての許可を得ることが好ましい。
【0012】
上記車両制御システムにおいて、前記第一の要求加速度は、自車両の前方の前記走行状態に関する情報に基づく直前の車両との相対関係の目標値に基づいて算出されることが好ましい。
【0013】
上記車両制御システムにおいて、前記第一の要求加速度は、自車両の前方の前記走行状態に関する情報に基づく最適な加速度に基づいて算出されることが好ましい。
【0014】
上記車両制御システムにおいて、前記走行状態に関する情報は、自車両の前方を走行する車両における加速度の目標値である前方車両加速度目標値を含むものであって、前記最適な加速度とは、前記前方車両加速度目標値であることが好ましい。
【発明の効果】
【0015】
本発明にかかる車両制御システムは、道路上の車両の走行状態に関する情報に基づいて要求される第一の要求加速度および自車両の直前を走行する先行車あるいは自車両の前方の障害物の少なくともいずれか一方と自車両との相対関係に基づいて要求される第二の要求加速度のうち最小の加速度を目標加速度として自車両の加速度を制御する。本発明にかかる車両制御システムによれば、先行車等との相対関係を確保することと道路上の車両の走行状態に基づいて自車両を制御することとの両立を図り、車両の制御における制御目標を適切なものとすることができるという効果を奏する。
【図面の簡単な説明】
【0016】
【図1】図1は、本実施形態における要求加速度の調停方法を示す図である。
【図2】図2は、実施形態にかかる車両制御システムが搭載された車両を示す図である。
【図3】図3は、インフラシステムを示す図である。
【図4】図4は、実施形態のECUが有する機能について説明するための図である。
【図5】図5は、実施形態のECUが有する機能について説明するための他の図である。
【図6】図6は、渋滞状態および臨界状態の判断方法の一例について説明するための図である。
【図7】図7は、減速ショックウェーブが発生した状態を示す図である。
【図8】図8は、減速ショックウェーブ発生時の車両制御について説明するための図である。
【図9】図9は、自車両の前方に渋滞が発生した状態を示す図である。
【図10】図10は、渋滞接近時の車両制御について説明するための図である。
【図11】図11は、前方の渋滞が解消された状態を示す図である。
【図12】図12は、前方の渋滞が解消されたときの車両制御について説明するための図である。
【発明を実施するための形態】
【0017】
以下に、本発明の実施形態にかかる車両制御システムにつき図面を参照しつつ詳細に説明する。なお、この実施形態によりこの発明が限定されるものではない。また、下記の実施形態における構成要素には、当業者が容易に想定できるものあるいは実質的に同一のものが含まれる。
【0018】
(実施形態)
図1から図12を参照して、実施形態について説明する。本実施形態は、車両制御システムに関する。図1は、本実施形態における要求加速度の調停方法を示す図、図2は、本実施形態にかかる車両制御システム1−1が搭載された車両を示す図、図3は、インフラシステムを示す図である。
【0019】
図1に示すように、本実施形態では、ACC制御の要求加速度と協調要求加速度の2種類の要求加速度から目標とする加速度を選択する場合、それらの要求加速度の最小値が選択される。そして、選択された加速度を目標加速度として、自車両の加速度が制御される。ここで、協調要求加速度とは、共通の「あるべき速度」を目標速度とするなど、道路上の車両の走行状態に関する情報に基づいて複数の車両を協調して走行させる協調交通流制御の要求加速度である。本実施形態の協調要求加速度は、第一の要求加速度に対応している。また、ACC制御の要求加速度は、自車両の直前を走行する先行車と自車両との相対関係に基づいて要求されるものであり、第二の要求加速度に対応する。
【0020】
「あるべき速度」とは、例えば、渋滞の発生を抑制可能な速度として算出されるものである。ACC制御の要求加速度が協調要求加速度を上回る場合、自車要求加速度として協調要求加速度が採用される。一方、ACC制御の要求加速度が協調要求加速度を下回る場合、先行車との車間の確保を優先してACC制御の要求加速度が自車要求加速度として採用される。
【0021】
本実施形態の要求加速度の調停によれば、常に、システムが減速側に働く。直前を走行する先行車が協調交通流制御のシステムを搭載していない車両であると、先行車に対してはACC制御の減速側支援が優先される。また、運転者が設定した速度へ追従するための要求加速度も調停対象となるため、協調要求加速度が運転者の設定車速以上に加速させてしまわないように調停することができる。
【0022】
図2に示すように、車両1には、エンジン11が設けられている。エンジン11には、トルクコンバータ12を有する自動変速機13が連結されている。エンジン11の駆動力は、トルクコンバータ12を介して自動変速機13に入力され、デファレンシャルギヤ14及びドライブシャフト15を介して駆動輪16に伝達される。自動変速機13は、A/T油圧制御装置17により車両の運転状態に応じて変速比が自動的に制御される。ブレーキ装置18は、ブレーキ油圧制御装置19によって制御されて、車両を制動する。
【0023】
車両1には、エンジン11や自動変速機13やブレーキ装置18などを制御する電子制御ユニット(ECU)20が設けられている。ECU20は、エンジン11、自動変速機13(A/T油圧制御装置17)及びブレーキ装置18(ブレーキ油圧制御装置19)の総合的な制御を行う。本実施形態では、エンジン11は、ECU20によって制御されて出力トルクが調節されることで、車両の加速度(駆動力)を制御する加速度制御手段として機能することができる。また、ブレーキ装置18は、ECU20によって制動力が制御されることで車両1の加速度(負の加速度)を制御する減速度制御手段として機能することができる。ECU20は、自車要求加速度を目標加速度としてエンジン11やブレーキ装置18等を制御し、目標加速度を実現する車両制御装置としての機能を有する。
【0024】
車両1には、アクセルペダルの操作量(アクセル開度)を検出するアクセルポジションセンサ21が設けられている。アクセルポジションセンサ21により検出されたアクセル開度を示す信号は、ECU20に出力される。エンジン11の吸気管22に設けられたスロットルコントロールバルブ23は、スロットルアクチュエータ24により開閉可能とされている。ECU20は、アクセル開度にかかわらずスロットルアクチュエータ24によりスロットルコントロールバルブ23のスロットル開度を制御することができる。車両1には、スロットルコントロールバルブ23の全閉状態(アイドル状態)及びスロットル開度を検出する図示しないスロットル開度センサが設けられている。スロットル開度センサによって検出されたアイドル状態及びスロットル開度のそれぞれを示す信号は、ECU20に出力される。
【0025】
車速センサ29は、車両1の車速を検出するものである。車間距離センサ30は、自車両と直前の車両との車間距離を検出することができる。車間距離センサ30は、例えば、車両前部に搭載されたレーザーレーダーセンサ又はミリ波レーダーセンサなどのセンサとすることができる。車間距離センサ30は、自車両の前方の障害物を検出することも可能である。ブレーキ操作量センサ31は、ブレーキ装置18の操作量を検出する。
【0026】
路車間通信装置32は、道路側に設けられたインフラシステム1−2(図3参照)との間で通信を行うものである。車車間通信装置33は、他車両との通信を行うものである。各センサ29,30,31の検出結果を示す信号は、ECU20に出力される。また、ECU20は、各通信装置32,33と接続されており、通信装置32,33のそれぞれと信号を授受する。
【0027】
ECU20は、変速マップを有しており、スロットル開度、車速などに基づいて、自動変速機13の変速段を決定し、この決定された変速段を成立させるようにA/T油圧制御装置17を制御することができる。
【0028】
ナビゲーション装置50は、自車両を所定の目的地に誘導することを基本的な機能としており、ECU60と、操作部51と、表示部52と、スピーカ53と、位置検出部54と、地図データベース55と、運転履歴記録部56とを備えている。ナビゲーション装置50のECU60は、ECU20と双方向の通信が可能である。
【0029】
ECU60のCPU61は、入力された情報に基づいて、ナビゲーション処理等の各種演算処理を行う。ECU60のROM62には、目的地までの経路の検索、経路中の走行案内等を行うための各種プログラムが格納されている。RAM63は、読み書き可能なメモリである。
【0030】
位置検出部54は、GPSレシーバ、地磁気センサ、距離センサ、ビーコンセンサ、及びジャイロセンサを備えている。位置検出部54は、自車の位置を検出し、その検出した自車の位置を示すデータをECU60に出力する。
【0031】
地図データベース55には、車両の走行に必要な情報(地図、直線路、カーブ、登降坂、高速道路、サグ、トンネルなど)が記憶されている。地図データベース55は、地図データファイル、交差点データファイル、ノードデータファイル、道路データファイルを備えている。ECU60は、地図データベース55を参照して、必要な情報を読み出す。本実施形態の車両制御システム1−1は、ECU20、路車間通信装置32、車車間通信装置33、A/T油圧制御装置17、ブレーキ油圧制御装置18、ナビゲーション装置50を備える。
【0032】
図3に示すインフラシステム1−2は、交通基盤としての道路側に設置されたシステムである。インフラシステム1−2は、協調交通流制御にかかる情報を道路上の各車両に送信する。インフラシステム1−2は、交通量計測装置41、インフラ装置42および路車間通信装置43を有する。交通量計測装置41は、道路を走行する車両の交通量を計測するものである。交通量計測装置41は、道路の各車線における単位時間あたりの通過台数を計測して道路の交通量を計測する。例えば、一つの進行方向について走行車線および追越車線をそれぞれ1車線備えた高速道路では、交通量計測装置41は、走行車線および追越車線のそれぞれにおいて単位時間あたりの通過台数を計測して、各車線の交通量および高速道路全体の交通量を計測する。
【0033】
インフラ装置42は、交通量計測装置41によって計測された交通量を取得し、路車間通信装置43を介して交通量を送信する。路車間通信装置43は、インフラシステム1−2と車両制御システム1−1との間で双方向の通信を行う通信装置である。路車間通信装置43は、車両制御システム1−1の路車間通信装置32から送信される信号を受信する。また、路車間通信装置43が送信した信号は、車両制御システム1−1の路車間通信装置32によって受信される。
【0034】
本実施形態の車両1では、ECU20により、他車両との車車間通信や路車間通信によって取得した、道路上の車両の走行状態に関する情報に基づいて車両制御が行われる。道路上の車両の走行状態に関する情報とは、道路上の個々の車両の走行状態に関する情報や、道路上の一定の領域における走行状態に関する情報を含むものである。例えば、個々の車両における現在位置、進行方向(方位)、走行速度、走行加速度、ジャーク、車間距離、車間時間等や、これらの目標値は道路上の車両の走行状態に関する情報に含まれる。また、道路上の交通量や、平均走行速度、交通流状況等は道路上の車両の走行状態に関する情報に含まれる。
【0035】
道路上の車両の走行状態に関する情報に基づく車両制御として、例えば、ECU20は、通信によって取得した周辺交通流状況から、全体をスムーズに流す「あるべき速度」を生成し、そのあるべき速度との相対速度を0にするようにスムーズに自車両を制御する。また、ECU20は、自車両の前方の渋滞に基づいて「あるべき速度」を生成することもできる。このように、道路上の車両の走行状態に関する情報に基づいて、全体をスムーズに流すことができる共通速度や渋滞の状況に応じた速度を目標速度とするなど、道路上の他車両と協調して自車両を走行させる制御を本実施形態では「協調交通流制御」と記載する。
【0036】
車車間通信では、識別情報、走行情報、制御目標量情報、ドライバ操作情報、車両スペック情報、通信規格情報、環境情報を含む各種情報が他車両に向けて送信される。識別情報は、送信元の車両IDや送信元車両が所属する車群のIDを含む。走行情報は、現在位置、進行方向(方位)、走行速度、走行加速度、ジャーク、車間距離、車間時間等の自車両の走行に関する測定値情報である。制御目標量情報は、車載機器が車両1を制御する際の目標値・入力値・制御指令値等であって、目標速度、目標加速度、目標ジャーク、目標方向(方位)、目標車間時間、目標車間距離を含む。
【0037】
ドライバ操作情報は、運転者から入力操作された操作量や入力情報であって、アクセル操作量、ブレーキ操作量(踏力やストローク)、ウィンカ操作(操作の有無や操作方向)、舵角、ブレーキランプのON/OFF等を含む。車両スペック情報は、車重、最大ブレーキ力、最大加速力、最大ジャーク、各アクチュエータ(ブレーキ、アクセル、シフト等)の反応速度や時定数を含む。通信規格情報は、予め決められたルールに基づくものであって、挨拶情報や転送情報を示すフラグなどを含む。環境情報は、走行環境に関する情報であって、路面情報(例えばμ、勾配、温度、ウェット/ドライ/凍結、アスファルト/未舗装)、風速や風向などの情報を含む。
【0038】
なお、本実施形態では、車両1のECU20が「あるべき速度」を実現するように車両1の速度や加速度等を自動制御する場合を例に説明するが、協調交通流制御は、これに限定されるものではない。協調交通流制御は、「あるべき速度」を実現するように車両1の速度や加速度等を自動制御するものだけでなく、「あるべき速度」で車両1を走行させるように運転者を誘導するものも含む。すなわち、協調交通流制御は、共通の「あるべき速度」を目標速度とするなど複数の車両が協調して走行する状態を実現するためのものであって、加速度や速度、車間等の走行状態の制御は自動であるか手動であるかを問わない。
【0039】
運転者を誘導する手段としては、例えば、道路全体をスムーズに流すために好ましい目標速度として「あるべき速度」を運転者に対して表示するHMI(Human Machine Interface)装置が挙げられる。例えば、インストルメントパネル等に好ましい走行速度を表示する表示装置が設けられてもよい。この場合、ECU20が行う協調交通流制御は、「あるべき速度」で車両1を走行させることができるように、その速度を表示装置に表示させることで運転者をアシストすることである。本実施形態では、協調交通流制御を実行可能な車両制御システム1−1が搭載された車両を「システム搭載車両」と記載する。また、他の車両との関係を記述する場合など、車両1を「自車両1」とも記載する。
【0040】
本実施形態の車両1は、ACC(Adaptive Cruise Control)制御を実行可能である。ACC制御では、レーダー等により先行車を検出し、先行車に合わせ一定の車間距離を保つように追従走行する追従制御、および、車両1の車速が一定車速となるように車両1を走行させる定速走行制御を実行可能である。ACC制御による車両制御は、例えば、ECU20によって実行される。
【0041】
図2に示すように、車両1は、ACCコントロールスイッチ34を備えている。ACCコントロールスイッチ34は、運転者がACC制御の各種操作を行うためのものである。運転者は、ACCコントロールスイッチ34によって、ACC制御のON/OFF、設定車速の入力、追従走行における所定距離の入力等を行うことができる。
【0042】
定速走行制御では、運転者により入力された設定車速を目標速度として車速が自動制御される。ECU20は、例えば、ACC制御の実行中に先行車が存在しない場合、設定車速を維持して走行するように車両1の走行制御を行う。また、ECU20は、設定車速よりも低速で走行する先行車が検出されている場合、その先行車との車間距離を予め入力された所定距離に保つように追従制御を行う。ECU20は、車間距離センサ30の検出結果に基づいて、自車両と同一の車線上の先行車を検出することができる。ECU20は、その先行車との車間距離が所定距離よりも小さくならないように車両1の車速や加速度を制御する。従って、ECU20は、先行車の車速が設定車速よりも低速である場合、自車両の車速を低下させて車間距離を保つようにする。
【0043】
本実施形態の車両1は、協調交通流制御を実行することで、渋滞の発生等を抑制することができる。高速道路等での渋滞の発生は、人間の認知能力・判断能力・操作能力の限界が原因の一つである。例えば、運転者には、直前車しか見えなかったり、道路勾配の変化を認知しにくかったり錯覚したりするという認知能力の限界や、交通流全体を見て判断することができないという判断能力の限界、直前車の動きに合わせて直前車よりも遅れて操作するという操作能力の限界がある。このため、先頭車両が減速した場合に、速度の低下が増幅しながら後続車両に伝播する減速ショックウェーブによって渋滞が発生することがある。
【0044】
本実施形態では、ECU20が協調交通流制御の「あるべき速度」を生成し、その速度を目標速度として車両1を制御する機能を有する。図4および図5は、ECU20が有する機能について説明するための図である。図4に示すように、ECU20は、周囲の交通流状況を認知する機能、最適速度等を判断する機能、および車両1を制御する機能を有する。なお、ECU20は、車両1を制御する機能に代えて、または加えて、運転者を誘導する支援機能を有していてもよい。
【0045】
認知する機能とは、例えば、人間や車間距離センサ30のような自律センサには見えないこれからの交通状況、例えば、視認できない前方の交通状況を認知するものである。ECU20は、路車間通信や車車間通信により取得した情報に基づいて、周囲の交通流状況を認知する。ここで、周囲の交通流状況とは、自車両が走行している道路上を自車両と同方向に走行する車両の走行状態に関する情報である。周囲とは、例えば、自車両が走行する道路における自車両の周囲であり、自車両が走行する車線や、進行方向が同じであって自車両と異なる車線も含むものである。また、周囲とは、自車両の前方や側方を含むものであり、更に自車両の後方を含むものであってもよい。
【0046】
図5に示すように、ECU20は、自車線の車両と他車線の車両とを選別することができる。例えば、システム搭載車両から送信された車両位置情報に基づいて、そのシステム搭載車両が自車線と同じ車線を走行しているか、他車線を走行しているかを判別することができる。ECU20は、例えば、ナビゲーション装置50から取得した道路の各車線に関する位置情報および自車両の位置情報と、他のシステム搭載車両の位置情報とに基づいて、自車両と他のシステム搭載車両とが同じ車線上にあるか否かを判断することができる。
【0047】
交通流状況とは、道路上の各車両の走行状態や、道路上の車両の流れの状態を含むものである。車両の流れの状態は、例えば、渋滞状態、臨界状態等として認知される。渋滞状態や臨界状態は、例えば、車速および交通量に基づいて判断することができる。例えば、車車間通信によって取得した自車両の前方を走行中のシステム搭載車両の車速と、路車間通信によってインフラ装置42から取得した交通量とに基づいて、自車両の前方の交通流状況が、渋滞状態や臨界状態であるかを判断することができる。図6は、渋滞状態および臨界状態の判断方法の一例について説明するための図である。図6において、横軸は交通量Q、縦軸は平均車速Vを示す。交通量Qとは、車線毎の単位時間あたりの通過台数(台/時間・車線)である。つまり、図6には、走行速度と道路を通行可能な交通量との関係が示されている。図6において原点を通る直線の傾きは、道路上の車両密度を示す。車両密度は、交通量Qの増加や平均車速Vの減少によって増加し、交通量Qの減少や平均車速Vの増加によって減少する。また、符号Dcは、臨界密度を示す。車両密度が臨界密度Dcを超えると、渋滞状態に移行しやすい。
【0048】
符号Qcは、最大交通量線を示す。最大交通量線Qcは、各平均車速Vと道路を通行可能な最大交通量との関係を示している。最大交通量線Qcは、人間が車両を走行させるときの平均的な車間時間特性に対応している。符号Ph1は自由相、Ph2は臨界相、Ph3は渋滞相をそれぞれ示す。自由相Ph1は、最大交通量線Qcにおける車両密度が小さな範囲に対応する。臨界相Ph2は、最大交通量線Qcにおいて自由相Ph1よりも車両密度が大きな範囲であって、臨界密度Dcの近傍および臨界密度Dcよりも車両密度が小さな範囲に対応する。渋滞相Ph3は、最大交通量線Qcにおいて臨界密度Dcよりも車両密度が大きな範囲に対応する。
【0049】
車両密度が臨界密度Dcを超えると一様な流れが不安定になり、わずかな速度の揺らぎが、車両の進行方向とは逆向きに成長しながら伝わり(減速ショックウェーブ)、渋滞相Ph3へ一気に変化(相転移)する。例えば、平均車速がV1で交通量がQ1である状態は、臨界相Ph2にある状態、すなわち臨界状態であり、この臨界状態にある場合、外乱や更なる交通量の増加によって車両密度が臨界密度Dcを超えやすく、渋滞状態に移行しやすい。例えば、サグ等において速度低下が後続車両に伝播するショックウェーブが発生すると、相転移によって渋滞状態に移行しやすい。
【0050】
ECU20の判断する機能とは、交通流がスムーズに流れる速度や車間を判断し決定する機能である。例えば、現在の車速よりも低い車速で各車両を走行させることで、交通流状況を臨界状態に至らせないことや臨界状態を解消することができる場合がある。これとは逆に、現在の車速よりも高い車速で各車両を走行させることで、臨界状態に至らせないことや臨界状態を解消することができる場合がある。ECU20は、例えば、取得した交通量において臨界状態とならないスムーズに流れる速度の範囲で最適速度を決定する。
【0051】
例えば、取得した交通量がQ1である場合、臨界状態とならず、かつ限界密度Dcを超えない速度の範囲Vaで最適速度を決定することができる。この場合、臨界状態とならず、かつ限界密度Dcを超えない速度の範囲Vaで現在の交通流の平均車速に最も近い車速やその近傍の車速を最適速度としてもよい。あるいは、上記の速度の範囲Vaにおける最大車速や最大車速以下でかつ最大車速の近傍の車速を最適速度としてもよい。また、車群の安定性を重視する観点からは、上記の速度の範囲Vaにおける中間値を最適速度としてもよい。このように臨界状態とならず、かつ限界密度Dcを超えない速度の範囲Vaで決定された最適速度は、道路における渋滞の発生を抑制可能な速度である。なお、最適速度の選択範囲とする速度の範囲Vaは、これに限定されるものではない。例えば、速度の範囲Vaの最大値は、速度V1よりも小さな速度であればよい。また、速度の範囲Vaの最小値は、交通量Q1と最大交通量線Qcとの2つの交点のうち低車速側の交点の速度以上であればよく、渋滞相Ph3の速度よりも大きな速度であることが好ましい。
【0052】
なお、各車両制御システム1−1において、取得した交通量と決定する最適速度との対応関係は同一や同様であることが望ましい。たとえば、異なるメーカーの車両同士であっても、インフラシステム1−2から同一の交通量を取得した場合に最適速度が同一の車速や近似の車速となることが好ましい。
【0053】
ECU20は、決定した最適速度および車間を目標速度および目標車間として、車両1の速度および加速度を制御する。ECU20は、例えば、下記式(1)によって目標とする加速度を算出する。
acooperate=ka・ades+kv・(vdes−v)+kd・(ddes−d)…(1)
ここで、acooperateは協調交通流制御の要求加速度、adesはあるべき加速度、vdesはあるべき速度、vは現在の車速、ddesはあるべき車間、dは現在の車間、ka、kvおよびkdは予め定められた係数(ゲイン)である。係数kaは、例えば1とすることができる。以下の説明では、協調交通流制御の要求加速度を単に「協調要求加速度」とも記載する。
【0054】
あるべき加速度adesは、最適な加速度であって、例えば、自車両1の前方の車両の走行状態に関する情報に基づく。あるべき加速度adesは、例えば、車車間通信によって取得した自車両の前方を走行しているシステム搭載車両の目標加速度(前方車両加速度目標値)とすることができる。前方のシステム搭載車両の目標加速度は、運転者の運転操作に基づくドライバ要求加速度であっても、協調要求加速度等の車両側のシステムの要求加速度であってもよい。このようにすれば、前方のシステム搭載車両の加減速と同期して自車両の加減速を行うフィードフォワード制御とすることができる。その結果、後に図7および図8を参照して説明するように、前方から伝播してくる減速ショックウェーブ等を自車両で吸収して途絶えさせることが可能となる。あるべき速度vdesは、ECU20が決定した最適速度である。あるべき車間ddesは、ECU20が決定した車間である。あるべき車間ddesは、自車両の前方の車両の走行状態に関する情報、例えば前方の車両の速度等に基づいて算出される。なお、車間とは、車間距離あるいは車間時間等の自車両1の直前の先行車との相対関係である。上記式(1)において、右辺第2項および第3項は、フィードバック制御量である。
【0055】
係数ka、kvおよびkdは、実験やシミュレーションの結果に基づいて予め定められている。係数ka、kvおよびkdは、例えば、道路上の車群の安定性の向上や、車両1の乗り心地等を考慮して決定される。なお、車群の安定性とは、例えば、先頭の車両が減速して後続車両に減速が伝播していくときの車間距離の減少量の伝播比で示される。この伝播比が1を超えると後方の車両ほど車間距離が詰まって減速ショックウェーブが発生する。
【0056】
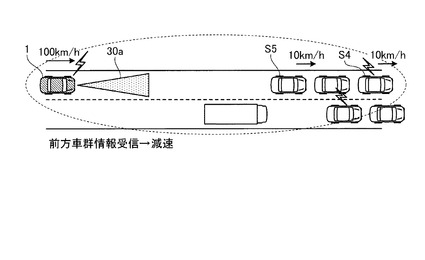
図7は、高速道路において減速ショックウェーブが発生した状態を示す図、図8は、減速ショックウェーブ発生時の車両制御について説明するための図である。なお、協調交通流制御は、高速道路に限らず、他の道路で実行されてもよい。図7において、符号S1,S2,S3は、自車線における自車両1の前方を走行するシステム搭載車両を示す。システム搭載車両S1からS3において、システム搭載車両S1は最も前方を走行しており、システム搭載車両S3は最も後方を走行している。減速ショックウェーブの発生により、後方の車両ほど速度低下幅が増幅している。前方のシステム搭載車両S1の速度80km/hに対して、2台目のシステム搭載車両S2の速度は70km/h、3台目のシステム搭載車両S3の速度は60km/hまで低下している。減速ショックウェーブは自車両1まで到達しておらず、自車両1は、時速80km/hで走行している。
【0057】
図8に示すように、ECU20は、車車間通信によって各システム搭載車両S1,S2,S3の現在車速を取得し、減速ショックウェーブを認知する。なお、ECU20は、車速だけでなく、各システム搭載車両S1,S2,S3の制動状態や先行車との車間距離の情報に基づいて減速ショックウェーブを認知するようにしてもよい。このように前方のシステム搭載車両から送信される情報に基づいて減速ショックウェーブの発生を認識することで、減速ショックウェーブが自車両1に到達する前に自車両1の減速を開始することができる。ECU20は、自車両1の前方が減速ショックウェーブ状態であると判断すると、最適速度を判断する。最適速度は、例えば、自車線の先行車群の平均速度(70km/h)あるいは最低速度(60km/h)とされる。ECU20は、先行車群から取得した情報に基づいてあるべき加速度およびあるべき車間を決定する。そして、ECU20は、あるべき速度、加速度および車間に基づき、上記式(1)から協調交通流制御の要求加速度を算出して、この要求加速度を目標加速度として車両1を制御する。
【0058】
このように通信によって前方の減速ショックウェーブを認知できることで、例えば、自車両1の直前をシステム搭載車両ではない大型の先行車N1が走行しており、前方を視認できないような場合であっても、減速ショックウェーブの接近を知ることができる。ECU20は、減速ショックウェーブが自車両1に到達する前に自車両1を減速させることができる。例えば、先行車N1が減速を開始する前に自車両1の減速が開始されることで、先行車N1との車間距離を十分に確保し、減速ショックウェーブによる車間の詰りを抑制することが可能となる。このように、前方のシステム搭載車両に対する自車両1の相対速度制御が、減衰として働き、減速ショックウェーブを素早く吸収することができる。
【0059】
図9は、高速道路において自車両の前方に渋滞が発生した状態を示す図、図10は、渋滞接近時の車両制御について説明するための図である。図9において、符号S4,S5は、自車線における自車両1の前方を走行するシステム搭載車両を示す。システム搭載車両S4,S5は、渋滞の車群内にあり、システム搭載車両S5は、渋滞の最後尾車両となっている。システム搭載車両S4,S5は、それぞれ時速10km/hで走行している。自車両1からは渋滞が直接見えず、自車両1は時速100km/hで走行している。
【0060】
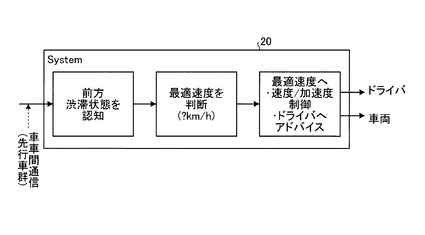
図10に示すように、自車両1のECU20は、車車間通信によって前方のシステム搭載車両S4,S5から取得した情報に基づいて、自車線における前方が渋滞状態であることを認知する。ECU20は、前方が渋滞状態であることを認知すると、自車線先行車群の速度からあるべき速度を生成する。生成される最適速度は、例えば、先行車群の平均速度(10km/h)あるいは最低速度(10km/h)とすることができる。つまり、目標速度は、自車両の前方を走行する車両(S4,S5)の速度である前方車両速度に基づいて決定される。また、ECU20は、先行車群から取得した情報に基づいてあるべき加速度およびあるべき車間を決定する。そして、ECU20は、あるべき速度、加速度および車間に基づき、上記式(1)から協調要求加速度を算出して、この要求加速度を目標加速度として車両1を制御する。
【0061】
このように前方の渋滞状態をいち早く認知してあるべき速度(前方渋滞速度)に早めの減速を行うことができることで、あるべき速度にスムーズに近づけることができる。例えば、渋滞の最後尾車両であるシステム搭載車両S5が車間距離センサ30の検出範囲30aに入る前の段階で自車両1の減速を開始することができる。これにより、急制動がなされることを抑制して渋滞末尾に対してスムーズに減速制御を開始することができる。
【0062】
また、カーブの先など、自車両1からの見通しがきかない位置に渋滞が発生している場合であっても、ECU20はいち早く渋滞状態を認知して減速を行うことができる。
【0063】
ここで、本実施形態の車両1のように協調交通流制御を実行可能なシステムと、ACC制御を実行可能なシステムとを備える車両では、複数の要求加速度の調停が必要となる。本実施形態では、要求加速度の最小値をとることで複数の要求加速度の調停を行う。ECU20は、下記式(2)によって、自車両1に要求する加速度を算出する。
areq=min(aacc,acooperate,・・・)…(2)
ここで、areqは自車要求加速度、aaccはACC制御の要求加速度である。以下の説明では、ACC制御の要求加速度aaccを単に「ACC要求加速度aacc」とも記載する。
【0064】
ACC要求加速度aaccは、ACC制御において、設定車速や直前の先行車との車間距離等に基づいて要求される加速度である。例えば、車間距離センサ30によって検出される先行車が存在しない場合、ACC要求加速度aaccは、設定車速と現在車速との速度差を0とできるように算出される。また、車間距離センサ30によって先行車が検出されており、かつその先行車の速度が設定車速を下回る場合、ACC要求加速度aaccは、先行車との実際の車間距離と予め定められた所定距離との差を0とできるように算出される。例えば、先行車との車間距離が詰まりすぎた場合には、ACC要求加速度aaccは、負の加速度として算出される。
【0065】
ECU20は、要求加速度としてACC要求加速度aaccと協調要求加速度acooperateの2種類の要求加速度から自車要求加速度areqを選択する場合、これらのミニマムセレクトによって要求加速度を調停する。これにより、自車要求加速度areqを適切に決定することができる。ACC要求加速度aaccが協調要求加速度acooperateよりも小さな加速度である場合とは、例えば、先行車との接近によりACC要求加速度aaccとして負の加速度が要求される場合である。このような場合に、自車要求加速度areqとしてミニマムセレクトによってACC要求加速度aaccが選択されることで、先行車との車間距離を適切に保つことができる。また、運転者が入力した設定車速へ追従するためのACC要求加速度aaccも調停対象となるため、協調要求加速度acooperateが運転者の設定車速以上に加速させてしまうことが規制される。
【0066】
一方、協調要求加速度acooperateがACC要求加速度aaccよりも小さな加速度である場合に、自車要求加速度areqとして協調要求加速度acooperateが選択されることで、全体をスムーズに流すことができる最適速度を超えて自車両1を加速させること等が抑制される。
【0067】
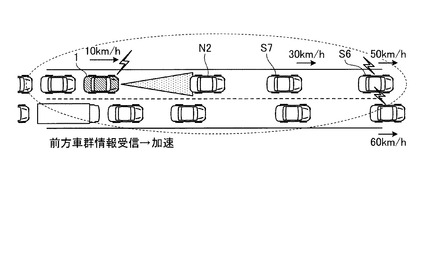
図11は、高速道路において前方の渋滞が解消された状態を示す図、図12は、前方の渋滞が解消されたときの車両制御について説明するための図である。図11において、符号S6,S7は、自車線における自車両1の前方を走行するシステム搭載車両を示す。また、符号N2は、自車両1の直前を走行する先行車を示す。先行車N2は、システム搭載車両ではない一般車両である。自車両前方のシステム搭載車両のうち前方を走るシステム搭載車両S6は、渋滞が解消されて速度50km/hまで加速し、後方のシステム搭載車両S7は、速度30km/hまで加速している。自車両1は、速度10km/hで走行している。ECU20は、自車両の前方のシステム搭載車両の速度に基づいて、前方の渋滞解消を認知することができる。例えば、より前方を走行するシステム搭載車両ほど高車速となっていることで渋滞解消を認知することができる。協調交通流制御では、先行車群のシステム搭載車両S6,S7に合わせて加速を要求する。例えば、自車両1の直前のシステム搭載車両S7の速度および加速度をあるべき速度および加速度として協調要求加速度acooperateが算出される。これにより、ECU20は、前方の渋滞解消状態をいち早く認知し、あるべき速度(前方の流れている速度)にスムーズに近づけるよう早めの加速支援を行うことができる。
【0068】
一方で、ACC制御では、先行車N2に合わせてACC要求加速度aaccが算出される。例えば、先行車N2と自車両1との車間距離が所定距離よりも小さい場合には、ACC要求加速度aaccは減速を要求する値となる。この場合、最小値調停されて、ACC要求加速度aaccが自車要求加速度areqとして採用される。また、先行車N2が十分に加速して、自車両1と先行車N2との車間が開くと、協調要求加速度acooperateが自車要求加速度areqとして採用される。協調要求加速度acooperateに基づいて積極的に自車両1を加速させることにより、渋滞を早期解消できるという利点がある。
【0069】
なお、ACC要求加速度aaccが先行車N2との車間に基づき算出された要求加速度である場合に限り、ACC要求加速度aaccと協調要求加速度acooperateとで最小値調停を行うようにしてもよい。言い換えると、先行車に対する追従制御が行われている場合に限りACC要求加速度aaccと協調要求加速度acooperateとの最小値を自車要求加速度areqとするようにしてもよい。このようにした場合、ACC制御において設定車速を目標の速度とする定速走行制御がなされている場合には、ACC要求加速度aaccと協調要求加速度acooperateとの調停はミニマムセレクトとは異なるものとされてもよい。例えば、協調要求加速度acooperateが優先して採用される調停がなされてもよい。
【0070】
ここで、調停の結果協調要求加速度acooperateが自車要求加速度areqとして採用される場合、車速がACC制御の設定車速を超える場合がある。協調交通流制御における「あるべき速度」が、運転者の所望する速度である設定車速を上回る場合などである。設定車速を上回る速度でクルーズコントロールがなされると、運転者が違和感を覚える可能性がある。このため、設定車速が入力されている場合であって、加速度の制御によって設定車速を超える車速で車両1を走行させようとする場合、予め運転者に設定車速を超える車速で走行させることについての許可を得ることが好ましい。例えば、協調交通流制御の最適速度が設定車速を上回る速度であることを表示装置等における表示や音声案内等によって運転者に伝え、最適速度で車両1を走行させることの許可を求めるようにすればよい。運転者が許可または不許可を入力する手段は、スイッチ等に対する操作とすることができる。このように運転者の許可を得ることで、ドライバ主権のもとで全体の交通流を最適にできる速度で車両1を走行させることができる。
【0071】
このように、本実施形態の車両制御システム1−1によれば、ACC要求加速度aaccと協調要求加速度acooperateとのミニマムセレクトがなされることによって最適な自車要求加速度areqを選択することができる。なお、調停対象の要求加速度として、ACC要求加速度aaccおよび協調要求加速度acooperateに加えて他の要求加速度が存在する場合に、それらの要求加速度のミニマムセレクトによって自車要求加速度areqを決定するようにしてもよい。例えば、プリクラッシュセーフティ(PCS:Pre-Crash Safety)システムにおいて自動的な制動操作を要求する要求加速度(以下、単に「PCS要求加速度」と記載する。)apcsが車両1に対して要求されている場合である。PCS要求加速度apcsは、自車両1の直前を走行する先行車や自車両の前方の障害物と自車両1との相対関係に基づいて要求される。つまり、PCS要求加速度apcsは、第二の要求加速度に対応している。ここで、先行車との相対関係とは、車間距離や車間時間等であり、障害物との相対関係とは、障害物との相対距離や障害物までの到達時間等である。PCS要求加速度apcsが要求された場合に、ACC要求加速度aacc、協調要求加速度acooperateおよびPCS要求加速度apcsの最小値が自車要求加速度areqとして採用されるようにしてもよい。
【0072】
ACC制御が実行されていない場合や、ACC制御システムが車両1に搭載されていない場合であって、協調要求加速度acooperateとPCS要求加速度apcsから自車要求加速度areqを選択するときには、協調要求加速度acooperateとPCS要求加速度apcsの最小値を採用するようにすればよい。
【0073】
このようにして、自律システム(ACC制御、PCSシステム)によって先行車や障害物と自車両との相対関係に基づいて要求されたACC要求加速度aaccやPCS要求加速度apcs、および協調交通流制御によって道路上の車両の走行状態に関する情報に基づいて要求された協調要求加速度acooperateの最小値が選択されることで、自車要求加速度areqを適切に決定し、車両1の制御における制御目標を適切なものとすることができる。
【0074】
なお、自律システムとは、例えば、自律的に要求加速度を決定するシステムである。自律的に決定するとは、例えば、道路上の車両、例えば自車両および直前の車両を除く車両の走行状態に関する情報に基づくことなく要求加速度を決定することである。例えば、ACC要求加速度aaccは、追従走行制御であれば自車両と先行車との相対関係(車間距離や車間時間等)に基づいて決定されるものであり、定速走行制御であれば運転者の設定した設定車速に基づいて決定されるものであるから、直前の先行車を除く他の車両の走行状態に関する情報に基づいて決定される要求加速度ではなく、自律的に決定される要求加速度である。同様に、PCS要求加速度apcsは、直前の先行車を除く他の車両の走行状態に関する情報に基づいて決定される要求加速度ではなく、自律的に決定される要求加速度である。
【0075】
一方、協調交通流制御では、周辺交通流状況に基づく「あるべき速度、加速度、車間」などに基づいて要求加速度が決定される。「あるべき速度」は、例えば、他車両と共通の目標速度であったり、車間距離センサ30では検出できない前方のシステム搭載車両の車速に基づく最適速度であったりする。つまり、協調交通流制御は、他車両と共通の制御目標に基づいて各車両の要求加速度が決定されたり、自律センサでは検出できない他車両の走行状態に関する情報に基づいて要求加速度が決定されたりする協調制御となっている。本実施形態では、この協調制御は、通信を介して取得した道路上の車両の走行状態に関する情報に基づいて実行されものである。
【0076】
なお、自律システムは、ACC制御およびPCSシステムには限定されない。先行車や障害物と自車両との相対関係に基づいて要求加速度を決定する他のシステムによる要求加速度が、最小値を選択する調停の対象とする要求加速度として含まれてもよい。
【0077】
また、調停対象とする要求加速度として、「先行車や障害物と自車両との相対関係に基づいて要求加速度を決定するシステム」以外の自律システムの要求加速度が含まれていてもよい。例えば、自車両1の前方のカーブや道路勾配、料金所等の走行環境に基づく要求加速度が調停対象に含まれてもよい。また、自律システムの要求加速度や協調制御システムの要求加速度を含む全ての要求加速度を調停対象としてそれらの最小値を自車要求加速度areqとして採用するようにしてもよい。要求加速度を調停して速度変化の仕方を制御することで、燃費や乗り心地の向上等を図ることができる。また、複数の要求加速度の最小値が選択されることで、より減速側の支援が行われ、車間距離の確保等が可能となる。
【0078】
なお、運転者のアクセル操作やブレーキ操作等の運転操作に基づく要求加速度であるドライバ要求加速度は、他の全ての要求加速度よりも優先される。すなわち、ドライバ要求加速度を入力する運転者の操作があった場合、他の要求加速度に代えてドライバ要求加速度に基づく車両制御がなされる。
【0079】
なお、ECU20によって、要求加速度の調停だけでなく、複数の要求速度の調停がなされてもよい。例えば、複数の要求速度の最小値を目標速度として選択するようにしてもよい。
【0080】
本実施形態では、「あるべき速度」としての最適速度が、各システム搭載車両において決定されたがこれには限定されない。例えば、最適速度は、インフラシステム1−2によって決定されてもよい。この場合、インフラシステム1−2は、例えば、交通量計測装置41によって計測された交通量や、車車間通信によって各システム搭載車両から取得した情報に基づいて最適速度を決定することができる。インフラシステム1−2は、臨界状態となることを抑制できる速度を各システム搭載車両に共通の最適速度として路車間通信により送信してもよい。また、インフラシステム1−2は、システム搭載車両から取得した情報に基づいて渋滞の発生を認知した場合には、渋滞よりも後方のシステム搭載車両、すなわち渋滞に接近しているシステム搭載車両に対して渋滞箇所の速度に基づく最適速度を送信してもよい。また、インフラシステム1−2は、渋滞の解消を認知した場合には、渋滞の車群中にあるシステム搭載車両に対して、渋滞から離脱したシステム搭載車両の速度に基づく最適速度を送信してもよい。
【0081】
また、本実施形態では、車両制御システム1−1は、道路側のインフラシステム1−2から交通量に関する情報を取得したが、交通量に関する情報の取得方法はこれには限定されない。例えば、各システム搭載車両は、自車両1が検出した近傍の交通量や、他のシステム搭載車両が検出した近傍の交通量に基づいて、周囲の交通流状況を認知することができる。各システム搭載車両の近傍の交通量は、例えば、レーダー等のセンサによって近傍を走行する車両数や各車両との相対位置を検出したり、カメラ等によって撮像された自車両1の周囲の画像データに基づいて近傍を走行する車両数や各車両との相対位置を検出したりすることによって検出可能である。このように取得した近傍の交通量を各システム搭載車両が車車間通信を介して共有することで、車車間通信が可能な範囲内における交通流状況を認知するようにすれば、インフラシステム1−2を省略して協調交通流制御を実行することや、インフラシステム1−2との通信範囲外のエリアにおいても協調交通流制御を実行することが可能となる。
【0082】
また、システム搭載車両は、他のシステム搭載車両と相互に通信するだけでなく、他のシステム搭載車両間の通信を中継したり、インフラシステム1−2と他のシステム搭載車両との路車間通信を中継したりしてもよい。このようにすれば、距離の離れたシステム搭載車両同士の通信やインフラシステム1−2から離れた位置を走行するシステム搭載車両とインフラシステム1−2との路車間通信を円滑に行わせることができる。また、山間部を走る道路など、路車間通信や車車間通信の通信可能な範囲が狭くなりやすい道路であっても、広範囲で協調交通流制御を実行できる。同様にして、インフラシステム1−2は、システム搭載車両と相互に通信するだけでなく、システム搭載車両同士の車車間通信を中継するようにしてもよい。また、路車間通信や車車間通信を中継する中継局や中継車が設けられてもよい。
【0083】
また、インフラシステム1−2は、交通量に関する情報だけでなく、他の道路交通に関する情報を路車間通信により送信してもよい。道路交通に関する情報とは、例えば、交通情報を提供するセンターから取得した、交通情報、通行規制や速度規制等の規制に関する情報、路面状況に関する情報等である。
【産業上の利用可能性】
【0084】
以上のように、本発明にかかる車両制御システムは、車両の制御における目標を適切なものとするのに適している。
【符号の説明】
【0085】
1−1 車両制御システム
1−2 インフラシステム
1 車両
20 ECU
30 車間距離センサ
32 路車間通信装置
33 車車間通信装置
50 ナビゲーション装置
areq 自車要求加速度
aacc ACC要求加速度
acooperate 協調要求加速度
【特許請求の範囲】
【請求項1】
道路上の車両の走行状態に関する情報に基づいて要求される第一の要求加速度および自車両の直前を走行する先行車あるいは自車両の前方の障害物の少なくともいずれか一方と自車両との相対関係に基づいて要求される第二の要求加速度から目標加速度を選択する場合、前記第一の要求加速度および前記第二の要求加速度のうち最小の加速度を前記目標加速度として自車両の加速度を制御する
ことを特徴とする車両制御システム。
【請求項2】
前記第一の要求加速度は、前記走行状態に関する情報に基づく目標速度に基づいて算出される
請求項1に記載の車両制御システム。
【請求項3】
前記走行状態に関する情報は、自車両の前方を走行する車両の速度である前方車両速度を含むものであって、
前記目標速度は、前記前方車両速度に基づいて決定される
請求項2に記載の車両制御システム。
【請求項4】
前記目標速度は、前記道路における渋滞の発生を抑制可能な速度である
請求項2に記載の車両制御システム。
【請求項5】
前記走行状態に関する情報は、前記道路の交通量を含むものであって、
前記目標速度は、走行速度と前記道路を通行可能な交通量との関係に基づいて算出される
請求項4に記載の車両制御システム。
【請求項6】
運転者が所望する車速である設定車速が入力されており、かつ前記目標速度が前記設定車速を超えている場合であって、前記加速度の制御によって前記設定車速を超える車速で自車両を走行させようとする場合、予め前記運転者に前記設定車速を超える車速で走行させることについての許可を得る
請求項2から5のいずれか1項に記載の車両制御システム。
【請求項7】
前記第一の要求加速度は、自車両の前方の前記走行状態に関する情報に基づく直前の車両との相対関係の目標値に基づいて算出される
請求項1から6のいずれか1項に記載の車両制御システム。
【請求項8】
前記第一の要求加速度は、自車両の前方の前記走行状態に関する情報に基づく最適な加速度に基づいて算出される
請求項1から7のいずれか1項に記載の車両制御システム。
【請求項9】
前記走行状態に関する情報は、自車両の前方を走行する車両における加速度の目標値である前方車両加速度目標値を含むものであって、
前記最適な加速度とは、前記前方車両加速度目標値である
請求項8に記載の車両制御システム。
【請求項1】
道路上の車両の走行状態に関する情報に基づいて要求される第一の要求加速度および自車両の直前を走行する先行車あるいは自車両の前方の障害物の少なくともいずれか一方と自車両との相対関係に基づいて要求される第二の要求加速度から目標加速度を選択する場合、前記第一の要求加速度および前記第二の要求加速度のうち最小の加速度を前記目標加速度として自車両の加速度を制御する
ことを特徴とする車両制御システム。
【請求項2】
前記第一の要求加速度は、前記走行状態に関する情報に基づく目標速度に基づいて算出される
請求項1に記載の車両制御システム。
【請求項3】
前記走行状態に関する情報は、自車両の前方を走行する車両の速度である前方車両速度を含むものであって、
前記目標速度は、前記前方車両速度に基づいて決定される
請求項2に記載の車両制御システム。
【請求項4】
前記目標速度は、前記道路における渋滞の発生を抑制可能な速度である
請求項2に記載の車両制御システム。
【請求項5】
前記走行状態に関する情報は、前記道路の交通量を含むものであって、
前記目標速度は、走行速度と前記道路を通行可能な交通量との関係に基づいて算出される
請求項4に記載の車両制御システム。
【請求項6】
運転者が所望する車速である設定車速が入力されており、かつ前記目標速度が前記設定車速を超えている場合であって、前記加速度の制御によって前記設定車速を超える車速で自車両を走行させようとする場合、予め前記運転者に前記設定車速を超える車速で走行させることについての許可を得る
請求項2から5のいずれか1項に記載の車両制御システム。
【請求項7】
前記第一の要求加速度は、自車両の前方の前記走行状態に関する情報に基づく直前の車両との相対関係の目標値に基づいて算出される
請求項1から6のいずれか1項に記載の車両制御システム。
【請求項8】
前記第一の要求加速度は、自車両の前方の前記走行状態に関する情報に基づく最適な加速度に基づいて算出される
請求項1から7のいずれか1項に記載の車両制御システム。
【請求項9】
前記走行状態に関する情報は、自車両の前方を走行する車両における加速度の目標値である前方車両加速度目標値を含むものであって、
前記最適な加速度とは、前記前方車両加速度目標値である
請求項8に記載の車両制御システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2012−30665(P2012−30665A)
【公開日】平成24年2月16日(2012.2.16)
【国際特許分類】
【出願番号】特願2010−171128(P2010−171128)
【出願日】平成22年7月29日(2010.7.29)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成24年2月16日(2012.2.16)
【国際特許分類】
【出願日】平成22年7月29日(2010.7.29)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]