
車両制御装置、車両制御方法及びプログラム
【課題】自車両が障害物と衝突した場合の被害ができるだけ少なくなるように自車両を制御する。
【解決手段】障害物検出部11は、自車両と衝突する可能性がある障害物を検出する。回避可否判定部15は、障害物検出部11によって障害物が検出された場合に、自車両の進行を制御することで障害物との衝突を回避できるか否かを判定する。衝突範囲特定部16は、回避可否判定部15によって障害物との衝突を回避できないと判定された場合に、障害物における自車両と衝突しうる範囲を特定する。最小被害部位特定部17は、衝突範囲特定部16が特定した範囲のうち、自車両と衝突した場合に障害物に生じる被害が最も小さい部位を特定する。進行制御部18は、回避可否判定部15によって障害物との衝突を回避できないと判定された場合に、最小被害部位特定部17が特定した部位に変形が及ぶように自車両の進行を制御する。
【解決手段】障害物検出部11は、自車両と衝突する可能性がある障害物を検出する。回避可否判定部15は、障害物検出部11によって障害物が検出された場合に、自車両の進行を制御することで障害物との衝突を回避できるか否かを判定する。衝突範囲特定部16は、回避可否判定部15によって障害物との衝突を回避できないと判定された場合に、障害物における自車両と衝突しうる範囲を特定する。最小被害部位特定部17は、衝突範囲特定部16が特定した範囲のうち、自車両と衝突した場合に障害物に生じる被害が最も小さい部位を特定する。進行制御部18は、回避可否判定部15によって障害物との衝突を回避できないと判定された場合に、最小被害部位特定部17が特定した部位に変形が及ぶように自車両の進行を制御する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両制御装置、車両制御方法及びプログラムに関するものである。
【背景技術】
【0002】
従来、自車両周辺の障害物の軌跡と自車両の軌跡とを予測し、当該予測に基づいて障害物と自車両との衝突可能性を判定し、当該衝突可能性に応じて警報や自動ブレーキによって衝突防止を計る車両制御装置が知られている。
【0003】
ここで、特許文献1には、自車両と障害物との衝突可能性に応じて加減速制御を行い、回避容易性が高まるようにする技術が記載されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−347252号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1には、回避容易性を高めるための制御を行う方法は開示されているものの、衝突した場合の被害を小さくする制御については開示されていない。
そこで、本発明は、自車両が障害物と衝突した場合の被害ができるだけ少なくなるように自車両を制御する車両制御装置、車両制御方法及びプログラムを提供するものである。
【課題を解決するための手段】
【0006】
上記の課題を解決するために、請求項1に記載した発明は、自装置を搭載する車両である自車両を制御する車両制御装置であって、自車両と衝突する可能性がある障害物を検出する障害物検出部(例えば、実施の形態での障害物検出部11)と、前記障害物検出部によって障害物が検出された場合に、自車両の進行を制御することで前記障害物との衝突を回避できるか否かを判定する回避可否判定部(例えば、実施の形態での回避可否判定部15)と、前記回避可否判定部によって前記障害物との衝突を回避できないと判定された場合に、前記障害物における自車両と衝突しうる範囲を特定する衝突範囲特定部(例えば、実施の形態での衝突範囲特定部16)と、前記衝突範囲特定部が特定した範囲のうち、自車両と衝突した場合に前記障害物に生じる被害が最も小さい部位を特定する最小被害部位特定部(例えば、実施の形態での最小被害部位特定部17)と、前記回避可否判定部によって前記障害物との衝突を回避できないと判定された場合に、前記最小被害部位特定部が特定した部位に変形が及ぶように自車両の進行を制御する進行制御部(例えば、実施の形態での進行制御部18)とを備えることを特徴とする。
【0007】
請求項2に記載した発明では、障害物の種別毎に、当該障害物の部位と、当該障害物と自車両とが衝突した場合に生じる被害の大きさとの関係を示すリスク情報を記憶するリスク記憶部(例えば、実施の形態でのリスク記憶部12)を備え、前記障害物検出部は、前記障害物の種別を特定し、前記最小被害部位特定部は、前記障害物検出部が特定した種別に関連付けられたリスク情報を読み出し、前記衝突範囲特定部が特定した範囲のうち前記リスク情報が示す被害の大きさが最も小さい部位を特定することを特徴とする。
【0008】
請求項3に記載した発明では、前記障害物検出部が検出した障害物が車両であり、かつ自車両が当該障害物の乗員室に衝突すると当該乗員室に変形が及ぶ可能性がある場合、前記最小被害部位特定部は、当該障害物の乗員室を、他の部位と比較して自車両と衝突した場合に生じる被害が大きい部位であると判定することを特徴とする。
【0009】
請求項4に記載した発明では、前記進行方向制御部による進行の制御は、自車両の加減速の制御か自車両の操舵制御かの少なくとも何れか一方の制御であり、前記最小被害部位特定部は、自車両と衝突した場合に前記障害物に生じる被害が最も小さい部位が複数存在する場合に、これらの部位のうち自車両の減速のみによって変形が及ぶ部位を選択することを特徴とする。
【0010】
請求項5に記載した発明では、前記衝突範囲特定部は、前記障害物の速度及び進行方向、並びに自車両の速度及び進行方向に基づいて衝突しうる範囲を特定することを特徴とする。
【0011】
請求項6に記載した発明は、自装置を搭載する車両である自車両を制御する車両制御装置を用いた車両制御方法であって、障害物検出部は、自車両と衝突する可能性がある障害物を検出し、回避可否判定部は、前記障害物検出部によって障害物が検出された場合に、自車両の進行を制御することで前記障害物との衝突を回避できるか否かを判定し、衝突範囲特定部は、前記回避可否判定部によって前記障害物との衝突を回避できないと判定された場合に、前記障害物における自車両と衝突しうる範囲を特定し、最小被害部位特定部は、前記衝突範囲特定部が特定した範囲のうち、自車両と衝突した場合に前記障害物に生じる被害が最も小さい部位を特定し、進行制御部は、前記回避可否判定部によって前記障害物との衝突を回避できないと判定された場合に、前記最小被害部位特定部が特定した部位に変形が及ぶように自車両の進行を制御することを特徴とする。
【0012】
請求項7に記載した発明は、自装置を搭載する車両である自車両を制御する車両制御装置を、自車両と衝突する可能性がある障害物を検出する障害物検出部、前記障害物検出部によって障害物が検出された場合に、自車両の進行を制御することで前記障害物との衝突を回避できるか否かを判定する回避可否判定部、前記回避可否判定部によって前記障害物との衝突を回避できないと判定された場合に、前記障害物における自車両と衝突しうる範囲を特定する衝突範囲特定部、前記衝突範囲特定部が特定した範囲のうち、自車両と衝突した場合に前記障害物に生じる被害が最も小さい部位を特定する最小被害部位特定部、前記回避可否判定部によって前記障害物との衝突を回避できないと判定された場合に、前記最小被害部位特定部が特定した部位に変形が及ぶように自車両の進行を制御する進行制御部として機能させるためのプログラムである。
【発明の効果】
【0013】
請求項1、6、7に記載した発明によれば、障害物との衝突を回避できないと判定した場合に、衝突によって障害物に生じる被害が最も小さくなる部位に変形が及ぶように自車両の進行を制御する。これにより、車両制御装置は、障害物との衝突を回避できない場合に、障害物に生じる被害を最小限に抑えることができる。
【0014】
請求項2に記載した発明によれば、障害物の種別を用いて衝突によって障害物に生じる被害が最も小さくなる部位を特定することができる。これにより、車両制御装置は、障害物毎に最適となる制御を行うことができる。
【0015】
請求項3に記載した発明によれば、障害物として検出された車両の乗員室に自車両が衝突すると当該乗員室に変形が及ぶ可能性がある場合、乗員室を、他の部位と比較して自車両と衝突した場合に生じる被害が大きい部位であると判定する。つまり、車両制御装置は、自車両が車両の乗員室に衝突すると当該乗員室に変形が及ぶ可能性がある場合に、乗員室以外の部位に変形が及ぶように自車両の進行を制御する。これにより、車両制御装置は、少なくとも障害物として検出された車両の乗員への衝撃を最小限に抑えることができる。
【0016】
請求項4に記載した発明によれば、自車両と衝突した場合に障害物に生じる被害が最も小さい部位が複数存在する場合に、これらの部位のうち自車両の減速のみによって変形が及ぶ部位を選択する。つまり、車両制御装置は、自車両の操舵を制御せず、障害物に生じる被害が最も小さい部位に変形が及ぶように自車両の減速を行う。これにより、自車両のフロントの面全体で障害物と接触するため、障害物に生じる変形の力を分散させることができる。
【0017】
請求項5に記載した発明によれば、障害物の速度及び進行方向、並びに自車両の速度及び進行方向に基づいて衝突しうる範囲を特定する。これにより、車両制御装置は、精度良く衝突しうる範囲を特定することができる。
【図面の簡単な説明】
【0018】
【図1】本発明の一実施形態による車両制御装置の構成を示す概略ブロック図である。
【図2】リスク記憶部が記憶する情報の例を示す図である。
【図3】本実施形態による車両制御装置の動作を示すフローチャートである。
【図4】車両制御装置の動作例を示す図である。
【発明を実施するための形態】
【0019】
以下、図面を参照しながら本発明の実施形態について詳しく説明する。
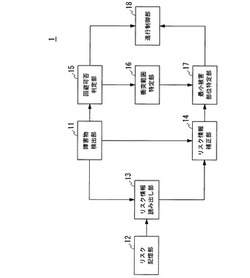
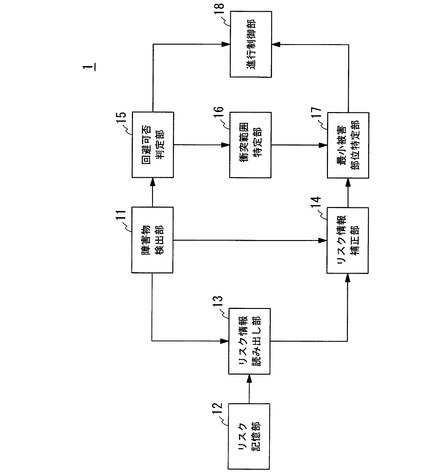
図1は、本発明の一実施形態による車両制御装置1の構成を示す概略ブロック図である。
車両制御装置1は、障害物検出部11、リスク記憶部12、リスク情報読み出し部13、リスク情報補正部14、回避可否判定部15、衝突範囲特定部16、最小被害部位特定部17、進行制御部18を備える。
【0020】
障害物検出部11は、車両制御装置1を搭載する車両(以下、自車両と呼ぶ)と衝突するおそれがある障害物を検出する。障害物の検出は、例えばレーザレーダやカメラなどによって行う。また、障害物検出部11は、検出した障害物の横幅や移動速度に基づいて、当該障害物の種別を推定する。障害物の種別の例としては、セダン、トラック、バスなどが挙げられる。障害物の種別の推定方法としては、予め障害物の形状を種別毎に記憶しておき、レーザレーダやカメラによって障害物の形状を特定し、当該形状に最も近い形状の障害物に関連付けられた種別を、障害物の種別と推定する方法が挙げられる。
【0021】
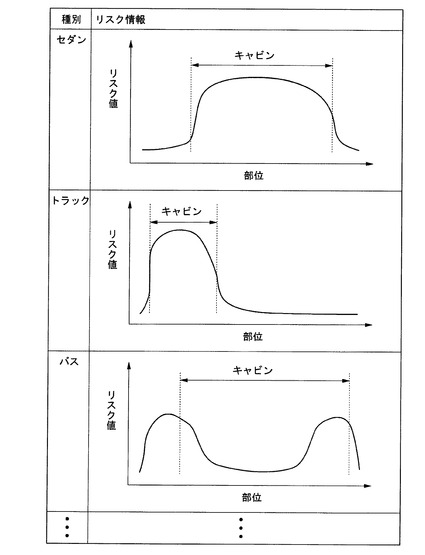
図2は、リスク記憶部12が記憶する情報の例を示す図である。
リスク記憶部12は、障害物の種別に関連付けてリスク情報を記憶する。なお、リスク情報とは、当該障害物の部位と、当該障害物と自車両とが衝突した場合に生じる被害の大きさ(以下、リスク値と呼ぶ)との関係を示す情報である。セダンやトラックに関連付けられたリスク情報によれば、車両のキャビン(乗員室)に相当する部位のリスク値が他の部位のリスク値と比較して高く設定されている。これは、障害物として検出された車両の乗員への衝撃を抑えるためである。なお、キャビン以外の部位のリスクは、キャビンからその部位までの距離と、当該部位の外からの衝撃に対する剛性に基づいて算出されたものである。他方、バスに関連付けられたリスク情報は、キャビンに相当する部位のリスク値が他のリスク値と比較して高くない。これは、バスのキャビンがバスの上方に設けられており、自車両とバスの車高差が大きく、自車両がバスに衝突したとしてもキャビンに変形が及ぶ可能性がないためである。つまり、リスク記憶部12が記憶するリスク情報は、少なくとも自車両が障害物と判定された車両の乗員室に衝突すると当該乗員室に変形が及ぶ可能性がある場合に、乗員室のリスク値が他の部位と比較して大きくなるように設定されている。なお、バスに関連付けられたリスク情報のリスク値は、ボディの外からの衝撃に対する剛性に基づいて算出されたものである。
図2に示すリスク情報はあくまでも一例であり、車両制御装置1を搭載する車両の車種などによって異なるものとなる。例えば、車両制御装置1がバスのキャビンと同程度の高さを有する車両に搭載される場合、図2に示すリスク情報と異なり、バスのキャビンに相当する部位のリスク値が高く設定されることとなる。
【0022】
リスク情報読み出し部13は、障害物検出部11が判定した障害物の種別に関連付けられたリスク情報をリスク記憶部12から読み出す。
リスク情報補正部14は、リスク情報読み出し部13が読み出したリスク情報を、障害物検出部11が検出した障害物の形状に基づいて補正する。
【0023】
回避可否判定部15は、障害物検出部11が検出した障害物を、自車両の進行の制御によって回避することができるか否かを判定する。なお、進行の制御とは、自車両の加減速の制御か自車両の操舵制御かの少なくとも何れか一方の制御である。具体的には、回避可否判定部15は、障害物の速度及び進行方向と、自車両の速度及び進行方向とから、障害物の進路及び自車両の進行の制御によって進行可能な進路を推定する。進行可能な進路の推定方法としては、例えば、障害物の進行方向に操舵し、かつ最大限に加速したときの進路と、障害物の進行方向の逆方向に操舵し、かつ最大限に減速したときの進路とを算出し、その2つの進路の間に存在する全ての進路を、進行可能な進路として推定する方法が挙げられる。そして、回避可否判定部15は、自車両の進行の制御によって進行可能な進路の中に、障害物との衝突を回避することができる進路があるか否かを判定する。
【0024】
衝突範囲特定部16は、回避可否判定部15によって推定された障害物の進路及び自車両の進行の制御によって進行可能な進路に基づいて、障害物における自車両と衝突しうる範囲を特定する。
最小被害部位特定部17は、リスク情報補正部14が補正したリスク情報のうち、衝突範囲特定部16が特定した範囲におけるリスク値が最も低い部位を特定する。
【0025】
進行制御部18は、回避可否判定部15が障害物との衝突を回避できると判定した場合に、障害物との衝突を回避するように、自車両の進行の制御を行う。また、進行制御部18は、回避可否判定部15が障害物との衝突を回避できないと判定した場合に、最小被害部位特定部17が特定した部位に変形が及ぶように、自車両の進行の制御を行う。
【0026】
次に、本実施形態による車両制御装置1の動作について説明する。
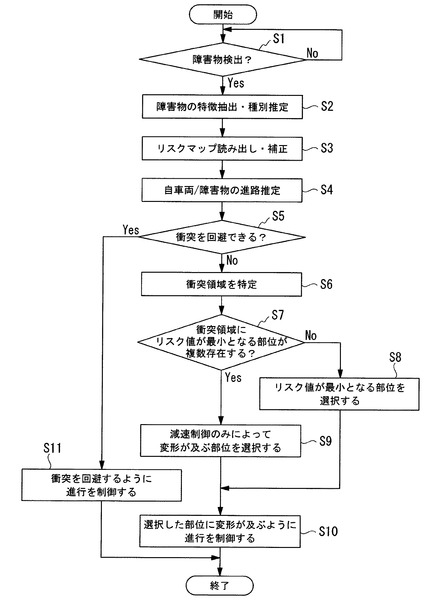
図3は、本実施形態による車両制御装置1の動作を示すフローチャートである。
図4は、車両制御装置1の動作例を示す図である。
車両制御装置1の障害物検出部11は、常時障害物の検出を実行する。そして、障害物検出部11は、障害物を検出したか否かを判定する(ステップS1)。障害物検出部11が、障害物を検出しなかった場合(ステップS1:NO)、障害物の検出処理を継続する。
【0027】
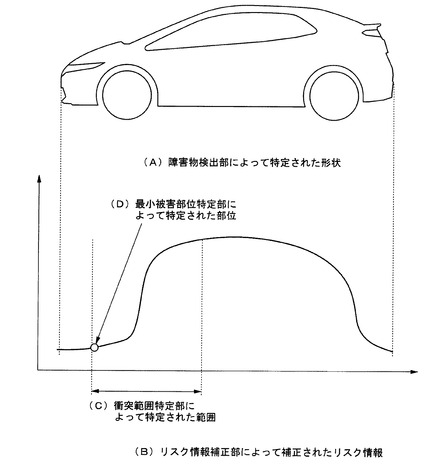
他方、障害物検出部11は、障害物を検出した場合(ステップS1:YES)、図4(A)に示すように、当該障害物の形状やホイールの位置などの特徴を抽出し、また当該特徴に基づいて障害物の種別を推定する(ステップS2)。図4に示す例では、障害物検出部11は、抽出した障害物の形状から当該障害物がセダンであると推定する。次に、リスク情報読み出し部13は、障害物検出部11が推定した種別に関連付けられたリスク情報をリスク記憶部12から読み出す。図4に示す例では、リスク情報読み出し部13は、種別「セダン」に関連付けられたリスク情報を読み出す。そして、リスク情報補正部14は、リスク情報読み出し部13が読み出したリスク情報を、障害物検出部11が抽出したホイールの位置等に基づいて補正する(ステップS3)。これにより、図4(B)に示すようなリスク情報を得ることができる。
【0028】
次に、回避可否判定部15は、レーザレーダやカメラなどからの入力情報に基づいて障害物の速度及び進行方向を推定する。次に、回避可否判定部15は、推定した障害物の速度及び進行方向から、障害物の進路を推定する。また、回避可否判定部15は、自車両の現在の速度及び進行方向から、自車両の進行の制御によって進行可能な進路を推定する(ステップS4)。そして、回避可否判定部15は、推定した進路に基づいて、自車両の進行の制御によって障害物との衝突を回避することができるか否かを判定する(ステップS5)。
【0029】
回避可否判定部15が、衝突を回避することができないと判定した場合(ステップS5:NO)、衝突範囲特定部16は、回避可否判定部15が推定した障害物の進路及び自車両の進行の制御によって進行可能な進路に基づいて、図4(C)に示すように、障害物における自車両と衝突しうる範囲を特定する(ステップS6)。次に、最小被害部位特定部17は、図4(D)に示すように、リスク情報補正部14がステップS3で補正したリスク情報における衝突範囲特定部16が特定した範囲内でリスク値が最小となる部位を特定する。このとき、最小被害部位特定部17は、リスク値が最小となる部位が複数存在するか否かを判定する(ステップS7)。
【0030】
最小被害部位特定部17は、リスク値が最小となる部位が1つだけ存在すると判定した場合(ステップS7:NO)、リスク値が最小となる部位を選択する(ステップS8)。他方、最小被害部位特定部17は、リスク値が最小となる部位が複数存在すると判定した場合(ステップS7:YES)、減速制御のみによって変形が及ぶ部位を選択する(ステップS9)。
【0031】
ステップS8、S9で最小被害部位特定部17が部位を選択すると、進行制御部18は、当該部位に変形が及ぶように車両の進行を制御する(ステップS10)。他方、ステップS5で、回避可否判定部15が、衝突を回避することができると判定した場合(ステップS5:YES)、進行制御部18は、警報や自動ブレーキなどにより、衝突を回避するように車両の進行を制御する(ステップS11)。
【0032】
このように、本実施形態によれば、障害物との衝突を回避できないと判定した場合に、衝突によって障害物に生じる被害が最も小さくなる部位に変形が及ぶように自車両の進行を制御する。これにより、車両制御装置1は、障害物との衝突を回避できない場合に、障害物に生じる被害を最小限に抑えることができる。
【0033】
また、本実施形態によれば、障害物の種別を用いて衝突によって障害物に生じる被害が最も小さくなる部位を特定することができる。これにより、車両制御装置1は、障害物毎に最適となる制御を行うことができる。
【0034】
また、本実施形態によれば、障害物として検出された車両のキャビンに自車両が衝突すると当該乗員室に変形が及ぶ可能性がある場合、キャビンを、他の部位と比較して自車両と衝突した場合に生じる被害が大きい部位であると判定する。つまり、車両制御装置1は、自車両が車両のキャビンに衝突すると当該キャビンに変形が及ぶ可能性がある場合に、キャビン以外の部位に変形が及ぶように自車両の進行を制御する。これにより、車両制御装置1は、少なくとも障害物として検出された車両の乗員への衝撃を最小限に抑えることができる。
【0035】
また、本実施形態によれば、自車両と衝突した場合に障害物に生じる被害が最も小さい部位が複数存在する場合に、これらの部位のうち自車両の減速のみによって変形が及ぶ部位を選択する。つまり、車両制御装置1は、自車両の操舵を制御せず、障害物に生じる被害が最も小さい部位に変形が及ぶように自車両の減速を行う。これにより、自車両のフロントの面全体で障害物と接触するため、障害物に生じる変形の力を分散させることができる。
【0036】
また、本実施形態によれば、障害物の速度及び進行方向、並びに自車両の速度及び進行方向に基づいて衝突しうる範囲を特定する。これにより、車両制御装置1は、精度良く衝突しうる範囲を特定することができる。
【0037】
以上、図面を参照してこの発明の一実施形態について詳しく説明してきたが、具体的な構成は上述のものに限られることはなく、この発明の要旨を逸脱しない範囲内において様々な設計変更等をすることが可能である。
例えば、本実施形態では、最小被害部位特定部17が、リスク情報読み出し部13が読み出したリスク情報に基づいて、自車両と衝突した場合に障害物に生じる被害が最も小さい部位を特定する場合を例に説明したが、これに限られない。例えば、障害物検出部11によって障害物であると判定された車両から人の顔を検出し、最小被害部位特定部17は、当該リスク情報に加え、人の顔が検出された箇所のリスク値を高く設定するようにしても良い。
【0038】
また、本実施形態では、リスク記憶部12が予めリスク情報を記憶している場合について説明したが、これに限られず、車両制御装置1が、カメラやレーザレーダによって特定された障害物の形状からリアルタイムに障害物の各部位のリスク値を算出するようにしても良い。
【0039】
上述の車両制御装置1は内部に、コンピュータシステムを有している。そして、上述した各処理部の動作は、プログラムの形式でコンピュータ読み取り可能な記録媒体に記憶されており、このプログラムをコンピュータが読み出して実行することによって、上記処理が行われる。ここでコンピュータ読み取り可能な記録媒体とは、磁気ディスク、光磁気ディスク、CD−ROM、DVD−ROM、半導体メモリ等をいう。また、このコンピュータプログラムを通信回線によってコンピュータに配信し、この配信を受けたコンピュータが当該プログラムを実行するようにしても良い。
【0040】
また、上記プログラムは、前述した機能の一部を実現するためのものであっても良い。さらに、前述した機能をコンピュータシステムにすでに記録されているプログラムとの組み合わせで実現できるもの、いわゆる差分ファイル(差分プログラム)であっても良い。
【符号の説明】
【0041】
1…車両制御装置 11…障害物検出部 12…リスク記憶部 13…リスク情報読み出し部 14…リスク情報補正部 15…回避可否判定部 16…衝突範囲特定部 17…最小被害部位特定部 18…進行制御部
【技術分野】
【0001】
本発明は、車両制御装置、車両制御方法及びプログラムに関するものである。
【背景技術】
【0002】
従来、自車両周辺の障害物の軌跡と自車両の軌跡とを予測し、当該予測に基づいて障害物と自車両との衝突可能性を判定し、当該衝突可能性に応じて警報や自動ブレーキによって衝突防止を計る車両制御装置が知られている。
【0003】
ここで、特許文献1には、自車両と障害物との衝突可能性に応じて加減速制御を行い、回避容易性が高まるようにする技術が記載されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−347252号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1には、回避容易性を高めるための制御を行う方法は開示されているものの、衝突した場合の被害を小さくする制御については開示されていない。
そこで、本発明は、自車両が障害物と衝突した場合の被害ができるだけ少なくなるように自車両を制御する車両制御装置、車両制御方法及びプログラムを提供するものである。
【課題を解決するための手段】
【0006】
上記の課題を解決するために、請求項1に記載した発明は、自装置を搭載する車両である自車両を制御する車両制御装置であって、自車両と衝突する可能性がある障害物を検出する障害物検出部(例えば、実施の形態での障害物検出部11)と、前記障害物検出部によって障害物が検出された場合に、自車両の進行を制御することで前記障害物との衝突を回避できるか否かを判定する回避可否判定部(例えば、実施の形態での回避可否判定部15)と、前記回避可否判定部によって前記障害物との衝突を回避できないと判定された場合に、前記障害物における自車両と衝突しうる範囲を特定する衝突範囲特定部(例えば、実施の形態での衝突範囲特定部16)と、前記衝突範囲特定部が特定した範囲のうち、自車両と衝突した場合に前記障害物に生じる被害が最も小さい部位を特定する最小被害部位特定部(例えば、実施の形態での最小被害部位特定部17)と、前記回避可否判定部によって前記障害物との衝突を回避できないと判定された場合に、前記最小被害部位特定部が特定した部位に変形が及ぶように自車両の進行を制御する進行制御部(例えば、実施の形態での進行制御部18)とを備えることを特徴とする。
【0007】
請求項2に記載した発明では、障害物の種別毎に、当該障害物の部位と、当該障害物と自車両とが衝突した場合に生じる被害の大きさとの関係を示すリスク情報を記憶するリスク記憶部(例えば、実施の形態でのリスク記憶部12)を備え、前記障害物検出部は、前記障害物の種別を特定し、前記最小被害部位特定部は、前記障害物検出部が特定した種別に関連付けられたリスク情報を読み出し、前記衝突範囲特定部が特定した範囲のうち前記リスク情報が示す被害の大きさが最も小さい部位を特定することを特徴とする。
【0008】
請求項3に記載した発明では、前記障害物検出部が検出した障害物が車両であり、かつ自車両が当該障害物の乗員室に衝突すると当該乗員室に変形が及ぶ可能性がある場合、前記最小被害部位特定部は、当該障害物の乗員室を、他の部位と比較して自車両と衝突した場合に生じる被害が大きい部位であると判定することを特徴とする。
【0009】
請求項4に記載した発明では、前記進行方向制御部による進行の制御は、自車両の加減速の制御か自車両の操舵制御かの少なくとも何れか一方の制御であり、前記最小被害部位特定部は、自車両と衝突した場合に前記障害物に生じる被害が最も小さい部位が複数存在する場合に、これらの部位のうち自車両の減速のみによって変形が及ぶ部位を選択することを特徴とする。
【0010】
請求項5に記載した発明では、前記衝突範囲特定部は、前記障害物の速度及び進行方向、並びに自車両の速度及び進行方向に基づいて衝突しうる範囲を特定することを特徴とする。
【0011】
請求項6に記載した発明は、自装置を搭載する車両である自車両を制御する車両制御装置を用いた車両制御方法であって、障害物検出部は、自車両と衝突する可能性がある障害物を検出し、回避可否判定部は、前記障害物検出部によって障害物が検出された場合に、自車両の進行を制御することで前記障害物との衝突を回避できるか否かを判定し、衝突範囲特定部は、前記回避可否判定部によって前記障害物との衝突を回避できないと判定された場合に、前記障害物における自車両と衝突しうる範囲を特定し、最小被害部位特定部は、前記衝突範囲特定部が特定した範囲のうち、自車両と衝突した場合に前記障害物に生じる被害が最も小さい部位を特定し、進行制御部は、前記回避可否判定部によって前記障害物との衝突を回避できないと判定された場合に、前記最小被害部位特定部が特定した部位に変形が及ぶように自車両の進行を制御することを特徴とする。
【0012】
請求項7に記載した発明は、自装置を搭載する車両である自車両を制御する車両制御装置を、自車両と衝突する可能性がある障害物を検出する障害物検出部、前記障害物検出部によって障害物が検出された場合に、自車両の進行を制御することで前記障害物との衝突を回避できるか否かを判定する回避可否判定部、前記回避可否判定部によって前記障害物との衝突を回避できないと判定された場合に、前記障害物における自車両と衝突しうる範囲を特定する衝突範囲特定部、前記衝突範囲特定部が特定した範囲のうち、自車両と衝突した場合に前記障害物に生じる被害が最も小さい部位を特定する最小被害部位特定部、前記回避可否判定部によって前記障害物との衝突を回避できないと判定された場合に、前記最小被害部位特定部が特定した部位に変形が及ぶように自車両の進行を制御する進行制御部として機能させるためのプログラムである。
【発明の効果】
【0013】
請求項1、6、7に記載した発明によれば、障害物との衝突を回避できないと判定した場合に、衝突によって障害物に生じる被害が最も小さくなる部位に変形が及ぶように自車両の進行を制御する。これにより、車両制御装置は、障害物との衝突を回避できない場合に、障害物に生じる被害を最小限に抑えることができる。
【0014】
請求項2に記載した発明によれば、障害物の種別を用いて衝突によって障害物に生じる被害が最も小さくなる部位を特定することができる。これにより、車両制御装置は、障害物毎に最適となる制御を行うことができる。
【0015】
請求項3に記載した発明によれば、障害物として検出された車両の乗員室に自車両が衝突すると当該乗員室に変形が及ぶ可能性がある場合、乗員室を、他の部位と比較して自車両と衝突した場合に生じる被害が大きい部位であると判定する。つまり、車両制御装置は、自車両が車両の乗員室に衝突すると当該乗員室に変形が及ぶ可能性がある場合に、乗員室以外の部位に変形が及ぶように自車両の進行を制御する。これにより、車両制御装置は、少なくとも障害物として検出された車両の乗員への衝撃を最小限に抑えることができる。
【0016】
請求項4に記載した発明によれば、自車両と衝突した場合に障害物に生じる被害が最も小さい部位が複数存在する場合に、これらの部位のうち自車両の減速のみによって変形が及ぶ部位を選択する。つまり、車両制御装置は、自車両の操舵を制御せず、障害物に生じる被害が最も小さい部位に変形が及ぶように自車両の減速を行う。これにより、自車両のフロントの面全体で障害物と接触するため、障害物に生じる変形の力を分散させることができる。
【0017】
請求項5に記載した発明によれば、障害物の速度及び進行方向、並びに自車両の速度及び進行方向に基づいて衝突しうる範囲を特定する。これにより、車両制御装置は、精度良く衝突しうる範囲を特定することができる。
【図面の簡単な説明】
【0018】
【図1】本発明の一実施形態による車両制御装置の構成を示す概略ブロック図である。
【図2】リスク記憶部が記憶する情報の例を示す図である。
【図3】本実施形態による車両制御装置の動作を示すフローチャートである。
【図4】車両制御装置の動作例を示す図である。
【発明を実施するための形態】
【0019】
以下、図面を参照しながら本発明の実施形態について詳しく説明する。
図1は、本発明の一実施形態による車両制御装置1の構成を示す概略ブロック図である。
車両制御装置1は、障害物検出部11、リスク記憶部12、リスク情報読み出し部13、リスク情報補正部14、回避可否判定部15、衝突範囲特定部16、最小被害部位特定部17、進行制御部18を備える。
【0020】
障害物検出部11は、車両制御装置1を搭載する車両(以下、自車両と呼ぶ)と衝突するおそれがある障害物を検出する。障害物の検出は、例えばレーザレーダやカメラなどによって行う。また、障害物検出部11は、検出した障害物の横幅や移動速度に基づいて、当該障害物の種別を推定する。障害物の種別の例としては、セダン、トラック、バスなどが挙げられる。障害物の種別の推定方法としては、予め障害物の形状を種別毎に記憶しておき、レーザレーダやカメラによって障害物の形状を特定し、当該形状に最も近い形状の障害物に関連付けられた種別を、障害物の種別と推定する方法が挙げられる。
【0021】
図2は、リスク記憶部12が記憶する情報の例を示す図である。
リスク記憶部12は、障害物の種別に関連付けてリスク情報を記憶する。なお、リスク情報とは、当該障害物の部位と、当該障害物と自車両とが衝突した場合に生じる被害の大きさ(以下、リスク値と呼ぶ)との関係を示す情報である。セダンやトラックに関連付けられたリスク情報によれば、車両のキャビン(乗員室)に相当する部位のリスク値が他の部位のリスク値と比較して高く設定されている。これは、障害物として検出された車両の乗員への衝撃を抑えるためである。なお、キャビン以外の部位のリスクは、キャビンからその部位までの距離と、当該部位の外からの衝撃に対する剛性に基づいて算出されたものである。他方、バスに関連付けられたリスク情報は、キャビンに相当する部位のリスク値が他のリスク値と比較して高くない。これは、バスのキャビンがバスの上方に設けられており、自車両とバスの車高差が大きく、自車両がバスに衝突したとしてもキャビンに変形が及ぶ可能性がないためである。つまり、リスク記憶部12が記憶するリスク情報は、少なくとも自車両が障害物と判定された車両の乗員室に衝突すると当該乗員室に変形が及ぶ可能性がある場合に、乗員室のリスク値が他の部位と比較して大きくなるように設定されている。なお、バスに関連付けられたリスク情報のリスク値は、ボディの外からの衝撃に対する剛性に基づいて算出されたものである。
図2に示すリスク情報はあくまでも一例であり、車両制御装置1を搭載する車両の車種などによって異なるものとなる。例えば、車両制御装置1がバスのキャビンと同程度の高さを有する車両に搭載される場合、図2に示すリスク情報と異なり、バスのキャビンに相当する部位のリスク値が高く設定されることとなる。
【0022】
リスク情報読み出し部13は、障害物検出部11が判定した障害物の種別に関連付けられたリスク情報をリスク記憶部12から読み出す。
リスク情報補正部14は、リスク情報読み出し部13が読み出したリスク情報を、障害物検出部11が検出した障害物の形状に基づいて補正する。
【0023】
回避可否判定部15は、障害物検出部11が検出した障害物を、自車両の進行の制御によって回避することができるか否かを判定する。なお、進行の制御とは、自車両の加減速の制御か自車両の操舵制御かの少なくとも何れか一方の制御である。具体的には、回避可否判定部15は、障害物の速度及び進行方向と、自車両の速度及び進行方向とから、障害物の進路及び自車両の進行の制御によって進行可能な進路を推定する。進行可能な進路の推定方法としては、例えば、障害物の進行方向に操舵し、かつ最大限に加速したときの進路と、障害物の進行方向の逆方向に操舵し、かつ最大限に減速したときの進路とを算出し、その2つの進路の間に存在する全ての進路を、進行可能な進路として推定する方法が挙げられる。そして、回避可否判定部15は、自車両の進行の制御によって進行可能な進路の中に、障害物との衝突を回避することができる進路があるか否かを判定する。
【0024】
衝突範囲特定部16は、回避可否判定部15によって推定された障害物の進路及び自車両の進行の制御によって進行可能な進路に基づいて、障害物における自車両と衝突しうる範囲を特定する。
最小被害部位特定部17は、リスク情報補正部14が補正したリスク情報のうち、衝突範囲特定部16が特定した範囲におけるリスク値が最も低い部位を特定する。
【0025】
進行制御部18は、回避可否判定部15が障害物との衝突を回避できると判定した場合に、障害物との衝突を回避するように、自車両の進行の制御を行う。また、進行制御部18は、回避可否判定部15が障害物との衝突を回避できないと判定した場合に、最小被害部位特定部17が特定した部位に変形が及ぶように、自車両の進行の制御を行う。
【0026】
次に、本実施形態による車両制御装置1の動作について説明する。
図3は、本実施形態による車両制御装置1の動作を示すフローチャートである。
図4は、車両制御装置1の動作例を示す図である。
車両制御装置1の障害物検出部11は、常時障害物の検出を実行する。そして、障害物検出部11は、障害物を検出したか否かを判定する(ステップS1)。障害物検出部11が、障害物を検出しなかった場合(ステップS1:NO)、障害物の検出処理を継続する。
【0027】
他方、障害物検出部11は、障害物を検出した場合(ステップS1:YES)、図4(A)に示すように、当該障害物の形状やホイールの位置などの特徴を抽出し、また当該特徴に基づいて障害物の種別を推定する(ステップS2)。図4に示す例では、障害物検出部11は、抽出した障害物の形状から当該障害物がセダンであると推定する。次に、リスク情報読み出し部13は、障害物検出部11が推定した種別に関連付けられたリスク情報をリスク記憶部12から読み出す。図4に示す例では、リスク情報読み出し部13は、種別「セダン」に関連付けられたリスク情報を読み出す。そして、リスク情報補正部14は、リスク情報読み出し部13が読み出したリスク情報を、障害物検出部11が抽出したホイールの位置等に基づいて補正する(ステップS3)。これにより、図4(B)に示すようなリスク情報を得ることができる。
【0028】
次に、回避可否判定部15は、レーザレーダやカメラなどからの入力情報に基づいて障害物の速度及び進行方向を推定する。次に、回避可否判定部15は、推定した障害物の速度及び進行方向から、障害物の進路を推定する。また、回避可否判定部15は、自車両の現在の速度及び進行方向から、自車両の進行の制御によって進行可能な進路を推定する(ステップS4)。そして、回避可否判定部15は、推定した進路に基づいて、自車両の進行の制御によって障害物との衝突を回避することができるか否かを判定する(ステップS5)。
【0029】
回避可否判定部15が、衝突を回避することができないと判定した場合(ステップS5:NO)、衝突範囲特定部16は、回避可否判定部15が推定した障害物の進路及び自車両の進行の制御によって進行可能な進路に基づいて、図4(C)に示すように、障害物における自車両と衝突しうる範囲を特定する(ステップS6)。次に、最小被害部位特定部17は、図4(D)に示すように、リスク情報補正部14がステップS3で補正したリスク情報における衝突範囲特定部16が特定した範囲内でリスク値が最小となる部位を特定する。このとき、最小被害部位特定部17は、リスク値が最小となる部位が複数存在するか否かを判定する(ステップS7)。
【0030】
最小被害部位特定部17は、リスク値が最小となる部位が1つだけ存在すると判定した場合(ステップS7:NO)、リスク値が最小となる部位を選択する(ステップS8)。他方、最小被害部位特定部17は、リスク値が最小となる部位が複数存在すると判定した場合(ステップS7:YES)、減速制御のみによって変形が及ぶ部位を選択する(ステップS9)。
【0031】
ステップS8、S9で最小被害部位特定部17が部位を選択すると、進行制御部18は、当該部位に変形が及ぶように車両の進行を制御する(ステップS10)。他方、ステップS5で、回避可否判定部15が、衝突を回避することができると判定した場合(ステップS5:YES)、進行制御部18は、警報や自動ブレーキなどにより、衝突を回避するように車両の進行を制御する(ステップS11)。
【0032】
このように、本実施形態によれば、障害物との衝突を回避できないと判定した場合に、衝突によって障害物に生じる被害が最も小さくなる部位に変形が及ぶように自車両の進行を制御する。これにより、車両制御装置1は、障害物との衝突を回避できない場合に、障害物に生じる被害を最小限に抑えることができる。
【0033】
また、本実施形態によれば、障害物の種別を用いて衝突によって障害物に生じる被害が最も小さくなる部位を特定することができる。これにより、車両制御装置1は、障害物毎に最適となる制御を行うことができる。
【0034】
また、本実施形態によれば、障害物として検出された車両のキャビンに自車両が衝突すると当該乗員室に変形が及ぶ可能性がある場合、キャビンを、他の部位と比較して自車両と衝突した場合に生じる被害が大きい部位であると判定する。つまり、車両制御装置1は、自車両が車両のキャビンに衝突すると当該キャビンに変形が及ぶ可能性がある場合に、キャビン以外の部位に変形が及ぶように自車両の進行を制御する。これにより、車両制御装置1は、少なくとも障害物として検出された車両の乗員への衝撃を最小限に抑えることができる。
【0035】
また、本実施形態によれば、自車両と衝突した場合に障害物に生じる被害が最も小さい部位が複数存在する場合に、これらの部位のうち自車両の減速のみによって変形が及ぶ部位を選択する。つまり、車両制御装置1は、自車両の操舵を制御せず、障害物に生じる被害が最も小さい部位に変形が及ぶように自車両の減速を行う。これにより、自車両のフロントの面全体で障害物と接触するため、障害物に生じる変形の力を分散させることができる。
【0036】
また、本実施形態によれば、障害物の速度及び進行方向、並びに自車両の速度及び進行方向に基づいて衝突しうる範囲を特定する。これにより、車両制御装置1は、精度良く衝突しうる範囲を特定することができる。
【0037】
以上、図面を参照してこの発明の一実施形態について詳しく説明してきたが、具体的な構成は上述のものに限られることはなく、この発明の要旨を逸脱しない範囲内において様々な設計変更等をすることが可能である。
例えば、本実施形態では、最小被害部位特定部17が、リスク情報読み出し部13が読み出したリスク情報に基づいて、自車両と衝突した場合に障害物に生じる被害が最も小さい部位を特定する場合を例に説明したが、これに限られない。例えば、障害物検出部11によって障害物であると判定された車両から人の顔を検出し、最小被害部位特定部17は、当該リスク情報に加え、人の顔が検出された箇所のリスク値を高く設定するようにしても良い。
【0038】
また、本実施形態では、リスク記憶部12が予めリスク情報を記憶している場合について説明したが、これに限られず、車両制御装置1が、カメラやレーザレーダによって特定された障害物の形状からリアルタイムに障害物の各部位のリスク値を算出するようにしても良い。
【0039】
上述の車両制御装置1は内部に、コンピュータシステムを有している。そして、上述した各処理部の動作は、プログラムの形式でコンピュータ読み取り可能な記録媒体に記憶されており、このプログラムをコンピュータが読み出して実行することによって、上記処理が行われる。ここでコンピュータ読み取り可能な記録媒体とは、磁気ディスク、光磁気ディスク、CD−ROM、DVD−ROM、半導体メモリ等をいう。また、このコンピュータプログラムを通信回線によってコンピュータに配信し、この配信を受けたコンピュータが当該プログラムを実行するようにしても良い。
【0040】
また、上記プログラムは、前述した機能の一部を実現するためのものであっても良い。さらに、前述した機能をコンピュータシステムにすでに記録されているプログラムとの組み合わせで実現できるもの、いわゆる差分ファイル(差分プログラム)であっても良い。
【符号の説明】
【0041】
1…車両制御装置 11…障害物検出部 12…リスク記憶部 13…リスク情報読み出し部 14…リスク情報補正部 15…回避可否判定部 16…衝突範囲特定部 17…最小被害部位特定部 18…進行制御部
【特許請求の範囲】
【請求項1】
自装置を搭載する車両である自車両を制御する車両制御装置であって、
自車両と衝突する可能性がある障害物を検出する障害物検出部と、
前記障害物検出部によって障害物が検出された場合に、自車両の進行を制御することで前記障害物との衝突を回避できるか否かを判定する回避可否判定部と、
前記回避可否判定部によって前記障害物との衝突を回避できないと判定された場合に、前記障害物における自車両と衝突しうる範囲を特定する衝突範囲特定部と、
前記衝突範囲特定部が特定した範囲のうち、自車両と衝突した場合に前記障害物に生じる被害が最も小さい部位を特定する最小被害部位特定部と、
前記回避可否判定部によって前記障害物との衝突を回避できないと判定された場合に、前記最小被害部位特定部が特定した部位に変形が及ぶように自車両の進行を制御する進行制御部と
を備えることを特徴とする車両制御装置。
【請求項2】
障害物の種別毎に、当該障害物の部位と、当該障害物と自車両とが衝突した場合に生じる被害の大きさとの関係を示すリスク情報を記憶するリスク記憶部を備え、
前記障害物検出部は、前記障害物の種別を特定し、
前記最小被害部位特定部は、前記障害物検出部が特定した種別に関連付けられたリスク情報を読み出し、前記衝突範囲特定部が特定した範囲のうち前記リスク情報が示す被害の大きさが最も小さい部位を特定する
ことを特徴とする請求項1に記載の車両制御装置。
【請求項3】
前記障害物検出部が検出した障害物が車両であり、かつ自車両が当該障害物の乗員室に衝突すると当該乗員室に変形が及ぶ可能性がある場合、
前記最小被害部位特定部は、当該障害物の乗員室を、他の部位と比較して自車両と衝突した場合に生じる被害が大きい部位であると判定する
ことを特徴とする請求項1または請求項2に記載の車両制御装置。
【請求項4】
前記進行制御部による進行の制御は、自車両の加減速の制御か自車両の操舵制御かの少なくとも何れか一方の制御であり、
前記最小被害部位特定部は、自車両と衝突した場合に前記障害物に生じる被害が最も小さい部位が複数存在する場合に、これらの部位のうち自車両の減速のみによって変形が及ぶ部位を選択する
ことを特徴とする請求項1から請求項3の何れか1項に記載の車両制御装置。
【請求項5】
前記衝突範囲特定部は、前記障害物の速度及び進行方向、並びに自車両の速度及び進行方向に基づいて衝突しうる範囲を特定する
ことを特徴とする請求項1から請求項4の何れか1項に記載の車両制御装置。
【請求項6】
自装置を搭載する車両である自車両を制御する車両制御装置を用いた車両制御方法であって、
障害物検出部は、自車両と衝突する可能性がある障害物を検出し、
回避可否判定部は、前記障害物検出部によって障害物が検出された場合に、自車両の進行を制御することで前記障害物との衝突を回避できるか否かを判定し、
衝突範囲特定部は、前記回避可否判定部によって前記障害物との衝突を回避できないと判定された場合に、前記障害物における自車両と衝突しうる範囲を特定し、
最小被害部位特定部は、前記衝突範囲特定部が特定した範囲のうち、自車両と衝突した場合に前記障害物に生じる被害が最も小さい部位を特定し、
進行制御部は、前記回避可否判定部によって前記障害物との衝突を回避できないと判定された場合に、前記最小被害部位特定部が特定した部位に変形が及ぶように自車両の進行を制御する
ことを特徴とする車両制御方法。
【請求項7】
自装置を搭載する車両である自車両を制御する車両制御装置を、
自車両と衝突する可能性がある障害物を検出する障害物検出部、
前記障害物検出部によって障害物が検出された場合に、自車両の進行を制御することで前記障害物との衝突を回避できるか否かを判定する回避可否判定部、
前記回避可否判定部によって前記障害物との衝突を回避できないと判定された場合に、前記障害物における自車両と衝突しうる範囲を特定する衝突範囲特定部、
前記衝突範囲特定部が特定した範囲のうち、自車両と衝突した場合に前記障害物に生じる被害が最も小さい部位を特定する最小被害部位特定部、
前記回避可否判定部によって前記障害物との衝突を回避できないと判定された場合に、前記最小被害部位特定部が特定した部位に変形が及ぶように自車両の進行を制御する進行制御部
として機能させるためのプログラム。
【請求項1】
自装置を搭載する車両である自車両を制御する車両制御装置であって、
自車両と衝突する可能性がある障害物を検出する障害物検出部と、
前記障害物検出部によって障害物が検出された場合に、自車両の進行を制御することで前記障害物との衝突を回避できるか否かを判定する回避可否判定部と、
前記回避可否判定部によって前記障害物との衝突を回避できないと判定された場合に、前記障害物における自車両と衝突しうる範囲を特定する衝突範囲特定部と、
前記衝突範囲特定部が特定した範囲のうち、自車両と衝突した場合に前記障害物に生じる被害が最も小さい部位を特定する最小被害部位特定部と、
前記回避可否判定部によって前記障害物との衝突を回避できないと判定された場合に、前記最小被害部位特定部が特定した部位に変形が及ぶように自車両の進行を制御する進行制御部と
を備えることを特徴とする車両制御装置。
【請求項2】
障害物の種別毎に、当該障害物の部位と、当該障害物と自車両とが衝突した場合に生じる被害の大きさとの関係を示すリスク情報を記憶するリスク記憶部を備え、
前記障害物検出部は、前記障害物の種別を特定し、
前記最小被害部位特定部は、前記障害物検出部が特定した種別に関連付けられたリスク情報を読み出し、前記衝突範囲特定部が特定した範囲のうち前記リスク情報が示す被害の大きさが最も小さい部位を特定する
ことを特徴とする請求項1に記載の車両制御装置。
【請求項3】
前記障害物検出部が検出した障害物が車両であり、かつ自車両が当該障害物の乗員室に衝突すると当該乗員室に変形が及ぶ可能性がある場合、
前記最小被害部位特定部は、当該障害物の乗員室を、他の部位と比較して自車両と衝突した場合に生じる被害が大きい部位であると判定する
ことを特徴とする請求項1または請求項2に記載の車両制御装置。
【請求項4】
前記進行制御部による進行の制御は、自車両の加減速の制御か自車両の操舵制御かの少なくとも何れか一方の制御であり、
前記最小被害部位特定部は、自車両と衝突した場合に前記障害物に生じる被害が最も小さい部位が複数存在する場合に、これらの部位のうち自車両の減速のみによって変形が及ぶ部位を選択する
ことを特徴とする請求項1から請求項3の何れか1項に記載の車両制御装置。
【請求項5】
前記衝突範囲特定部は、前記障害物の速度及び進行方向、並びに自車両の速度及び進行方向に基づいて衝突しうる範囲を特定する
ことを特徴とする請求項1から請求項4の何れか1項に記載の車両制御装置。
【請求項6】
自装置を搭載する車両である自車両を制御する車両制御装置を用いた車両制御方法であって、
障害物検出部は、自車両と衝突する可能性がある障害物を検出し、
回避可否判定部は、前記障害物検出部によって障害物が検出された場合に、自車両の進行を制御することで前記障害物との衝突を回避できるか否かを判定し、
衝突範囲特定部は、前記回避可否判定部によって前記障害物との衝突を回避できないと判定された場合に、前記障害物における自車両と衝突しうる範囲を特定し、
最小被害部位特定部は、前記衝突範囲特定部が特定した範囲のうち、自車両と衝突した場合に前記障害物に生じる被害が最も小さい部位を特定し、
進行制御部は、前記回避可否判定部によって前記障害物との衝突を回避できないと判定された場合に、前記最小被害部位特定部が特定した部位に変形が及ぶように自車両の進行を制御する
ことを特徴とする車両制御方法。
【請求項7】
自装置を搭載する車両である自車両を制御する車両制御装置を、
自車両と衝突する可能性がある障害物を検出する障害物検出部、
前記障害物検出部によって障害物が検出された場合に、自車両の進行を制御することで前記障害物との衝突を回避できるか否かを判定する回避可否判定部、
前記回避可否判定部によって前記障害物との衝突を回避できないと判定された場合に、前記障害物における自車両と衝突しうる範囲を特定する衝突範囲特定部、
前記衝突範囲特定部が特定した範囲のうち、自車両と衝突した場合に前記障害物に生じる被害が最も小さい部位を特定する最小被害部位特定部、
前記回避可否判定部によって前記障害物との衝突を回避できないと判定された場合に、前記最小被害部位特定部が特定した部位に変形が及ぶように自車両の進行を制御する進行制御部
として機能させるためのプログラム。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2012−232693(P2012−232693A)
【公開日】平成24年11月29日(2012.11.29)
【国際特許分類】
【出願番号】特願2011−103573(P2011−103573)
【出願日】平成23年5月6日(2011.5.6)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
【公開日】平成24年11月29日(2012.11.29)
【国際特許分類】
【出願日】平成23年5月6日(2011.5.6)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
[ Back to top ]