
車両制御装置および車両制御方法
【課題】ブレーキペダルの踏み込み操作量を検出するためのセンサを設けることなく、アクセルペダルおよびブレーキペダルの同時踏み込みに起因する車両の加速や発進を抑える。
【解決手段】機関ECU31により算出される内燃機関11の出力トルクと加速度センサ34により検出した車両10の加速度とに基づいてブレーキペダル17の踏み込み操作力を推定する。その推定されるブレーキペダル17の踏み込み操作力が第2判定値以上であり、且つアクセルセンサ33により検出されるアクセルペダル22の踏み込み操作量が第1判定値以上であるときに、内燃機関11の出力トルクを制限する。
【解決手段】機関ECU31により算出される内燃機関11の出力トルクと加速度センサ34により検出した車両10の加速度とに基づいてブレーキペダル17の踏み込み操作力を推定する。その推定されるブレーキペダル17の踏み込み操作力が第2判定値以上であり、且つアクセルセンサ33により検出されるアクセルペダル22の踏み込み操作量が第1判定値以上であるときに、内燃機関11の出力トルクを制限する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、アクセルペダルおよびブレーキペダルが同時に踏み込み操作された状態になったときに車軸に伝達される駆動トルクを制限する車両制御装置および車両制御方法に関するものである。
【背景技術】
【0002】
近年、アクセルペダルがフロアマットに引っ掛かった状況でブレーキペダルが踏み込まれたりするなどして、アクセルペダルとブレーキペダルとが同時に踏み込まれた状態になる事象の発生が報告されている。この場合、アクセルペダルの踏み込み操作量が大きいと、乗員によってブレーキペダルが踏み込み操作されているのにも関わらず、同車両が加速したり発進したりするといった状況になってしまう。
【0003】
従来、特許文献1には、アクセルペダルおよびブレーキペダルの同時操作時において、センサによって検出したブレーキペダルの踏み込み操作量(あるいは、その指標値[例えば、ブレーキ作動圧力])が判定値より大きくなったときに、車載内燃機関の出力を制限することが提案されている。なお上記判定値としては、乗員によって意図的に両ペダルが踏み込まれる状況であれば通常とり得ないブレーキペダルの踏み込み操作量に相当する値が設定される。
【0004】
こうした装置によれば、アクセルペダルとブレーキペダルとが誤って同時に踏み込まれた状態になった場合であっても、ブレーキペダルの踏み込み操作量が大きくなれば、アクセルペダルの踏み込み操作が乗員により意図された操作ではないとして、ブレーキペダルの踏み込み操作が優先されて、車載内燃機関の出力が制限される。その結果、アクセルペダルおよびブレーキペダルの同時踏み込みに起因する車両の加速や発進が抑えられるようになる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2005−291030号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ここで、車両の製造コストの削減を実現するために、ブレーキペダルの踏み込み操作量を検出するためのセンサを廃止することが検討されている。この場合、単に上記センサを廃止すると、そのときどきのブレーキペダルの踏み込み操作量を把握することができなくなるために、上述したアクセルペダルおよびブレーキペダルの同時踏み込みに起因する車両の加速や発進を抑えることができなくなってしまう。
【0007】
本発明は、そうした実情に鑑みてなされたものであり、その目的は、ブレーキペダルの踏み込み操作量を検出するためのセンサを設けることなく、アクセルペダルおよびブレーキペダルの同時踏み込みに起因する車両の加速や発進を精度よく抑えることのできる車両制御装置および車両制御方法を提供することにある。
【課題を解決するための手段】
【0008】
以下、上記目的を達成するための手段及びその作用効果について説明する。
本発明の車両制御装置は、
駆動源としての内燃機関(11)と、車両加速度を検出する加速度センサ(34)と、アクセルペダル(22)の踏み込み操作量を検出するアクセルセンサ(33)とを備えた車両(10)に適用されて、前記内燃機関(11)の出力トルクを算出する出力算出手段(31、S104)と、前記加速度センサ(34)により検出した前記車両加速度および、前記出力算出手段(31、S104)により算出した前記出力トルクに基づいてブレーキペダル(17)の踏み込み操作力を推定する踏力推定手段(32、S107,S108,S112,S115)と、前記アクセルセンサ(33)により検出される前記踏み込み操作量が第1判定値以上であり、且つ前記踏力推定手段(32、S107,S108,S112,S115)により推定される前記踏み込み操作力が第2判定値以上であるときに、前記内燃機関(11)から車軸(13)に伝達される駆動トルクを制限するトルク制限手段(32、S116,S117)とを備えることをその要旨とする。
【0009】
上記構成によれば、加速度センサによって車両の実加速度を検出することができるとともに、内燃機関の出力トルクに基づいて同内燃機関の運転によって得られる車両の加速度(機関加速度)を把握することができる。そのため、それら実加速度と機関加速度との関係に基づいてブレーキペダルの踏み込み操作による車両の加速度変化分を把握することができ、その加速度変化分をもとにブレーキペダルの踏み込み操作力(踏力)を精度よく推定することができる。そして、その推定した値(ブレーキ踏力推定値)に基づいてブレーキペダルの踏力が第2判定値以上になっていることを精度よく判断することができる。そのため、そうしたブレーキ踏力推定値に基づく判断とアクセルセンサにより検出したアクセルペダルの踏み込み操作量が第1判定値以上であるとの判断とをもとに、アクセルペダルおよびブレーキペダルの同時踏み込みを精度よく判定したうえで、内燃機関から車軸に伝達される駆動トルクの制限を的確に行うことができる。したがって、ブレーキペダルの踏み込み操作量を検出するためのセンサを設けることなく、アクセルペダルおよびブレーキペダルの同時踏み込みに起因する車両の加速や発進を抑えることができる。
【0010】
本発明の車両制御において、前記車両(10)は、前記内燃機関(11)の吸気負圧を利用して形成されたブースター負圧により前記ブレーキペダル(17)の踏み込み操作の助勢を行うブレーキブースター(18)を備えてなり、前記踏力推定手段(32、S107,S108,S112,S113,S115)は、前記ブースター負圧を前記踏み込み操作力の推定パラメータとして用いることが好ましい。
【0011】
車両に、内燃機関の吸気負圧を利用して形成されたブースター負圧によってブレーキペダルの踏み込み操作の助勢を行うブレーキブースターを設けることが多用されている。このブレーキブースターは、ブレーキペダルが踏み込み操作されると、ブースター負圧が大気圧に近づく構造になっている。そのため、ブレーキペダルの踏み込み操作が短時間において繰り返し行われると、ブースター負圧が殆ど無くなった状態(ほぼ大気圧になった状態)になって、ブレーキブースターによる助勢が殆ど無い状態でブレーキペダルが踏み込まれる状況になってしまい、ブレーキペダルの踏み込み操作による車両の減速度合いが小さくなってしまう。その結果、ブレーキペダルの実際の踏力と内燃機関の出力トルクと車両の実加速度との関係が変化してしまうために、上述した踏力推定手段によって推定されるブレーキ踏力指標値の推定精度の低下を招いてしまう。
【0012】
この点、上記構成によれば、ブースター負圧を推定パラメータの一つとして用いてブレーキ踏力推定値を算出することができるために、同ブレーキ踏力推定値を、ブースター負圧の変化による影響を考慮しつつ精度よく算出することができる。
【0013】
本発明の車両制御装置において、前記車両(10)は、前記ブレーキペダル(17)の踏み込み操作の有無を検出するブレーキスイッチ(35)を備えてなり、前記車両制御装置は、前記ブレーキスイッチ(35)により検出される前記ブレーキペダル(17)の踏み込み操作の実行頻度が第3判定値以上になったときに前記第2判定値を小さい値に変更する変更手段(32、S302,S303)を備えることが好ましい。
【0014】
上記構成によれば、ブレーキペダルの踏み込み操作が短時間において繰り返し行われたとき、すなわちブースター負圧が小さくなっているときには、そうでないときと比較して、前記ブレーキ踏力推定値が小さい状況において駆動トルクの制限の実行が許可される。そのため、このとき車両の減速度合いが小さくなって上記ブレーキ踏力推定値が小さくなるとはいえ、これに合わせて駆動トルクの制限についての実行条件を変更することができ、車両の駆動トルクの制限を的確に行うことができる。
【0015】
本発明の車両制御装置において、前記踏力推定手段(32、S107,S108,S112,S114,S115)は、前記車両(10)の重量を前記踏み込み操作力の推定パラメータとして用いることが好ましい。
【0016】
ブレーキペダルが同一の力で踏み込まれた場合であっても、車両の重量に応じて同車両の実際の減速度合いは異なる。そのため、車両の重量に応じて、ブレーキペダルの実際の踏力と内燃機関の出力トルクと車両の実加速度との関係が変化すると云える。車両の重量は、車両に載せられる荷物の重量や、内燃機関の燃料の残量、搭乗者数などに応じて変化する。そのため、そうした車両重量の変化に起因して、上述した踏力推定手段によって推定されるブレーキ踏力推定値の推定精度の低下を招いてしまう。
【0017】
この点、上記構成によれば、車両の重量を算出パラメータの一つとして用いてブレーキ踏力推定値を推定することができるために、同ブレーキ踏力推定値を、車両重量の変化による影響を考慮しつつ精度よく推定することができる。
【0018】
なお、本発明の車両制御装置においては、前記ブースター負圧を検出する圧力センサ(37)を備えた車両(10)において同圧力センサ(37)によって検出されるブースター負圧を前記踏力推定手段(32、S107,S108,S112,S113,S115)による踏み込み操作力の推定パラメータとして用いることができる。
【0019】
本発明の車両制御装置において、当該装置は、前記加速度センサ(34)により検出される前記車両加速度と前記出力算出手段(31、S104)によって算出される前記出力トルクとに基づいて前記車両(10)の重量を算出する重量算出手段(32)を備えることが好ましく、前記踏力推定手段(32、S107,S108,S112,S114,S115)は、前記重量算出手段(32)によって算出される重量を前記推定パラメータとして用いることが好ましい。
【0020】
上記構成によれば、加速度センサによって検出される車両の実加速度[a]と前記出力算出手段によって算出される内燃機関の出力トルク、すなわち車両を走行させるべく同車両に付与される力[F]とに基づいて運動方程式[F=ma]から、車両の重量[m]を精度よく算出することができる。
【0021】
本発明の車両制御方法は、駆動源としての内燃機関(11)と車両加速度を検出する加速度センサ(34)とアクセルペダル(22)の踏み込み操作量を検出するアクセルセンサ(33)とを備えた車両(10)の制御方法であって、前記内燃機関(11)の出力トルクを算出する出力算出工程(S104)と、前記加速度センサ(34)により検出した前記加速度および、前記出力算出工程(S104)において算出した前記出力トルクに基づいてブレーキペダル(17)の踏み込み操作力を推定する踏力推定工程(S107,S108,S112,S115)と、前記アクセルセンサ(33)により検出される前記踏み込み操作量が第1判定値以上であり、且つ前記踏力推定工程(S107,S108,S112,S115)において推定される前記踏み込み操作力が第2判定値以上であるときに、前記内燃機関(11)から車軸(13)に伝達される駆動トルクを制限するトルク制限工程(S116,S117)とを含むことを要旨とする。
【0022】
上記車両制御方法によれば、上記車両制御装置と同等の作用・効果を得ることができる。
【図面の簡単な説明】
【0023】
【図1】本発明の第1の実施の形態が適用される車両の概略構成を示す略図。
【図2】ブレーキブースターの断面構造を示す断面図。
【図3】ピッチング現象により発生する車両加速度の検出誤差分の説明図。
【図4】第1の実施の形態のトルク制限処理の実行手順を示すフローチャート。
【図5】同トルク制限処理の実行手順を示すフローチャート。
【図6】第2の実施の形態のトルク制限処理の実行手順を示すフローチャート。
【図7】第3の実施の形態のトルク制限処理の実行手順を示すフローチャート。
【発明を実施するための形態】
【0024】
(第1の実施の形態)
以下、本発明の車両制御装置を具体化した第1の実施の形態について説明する。
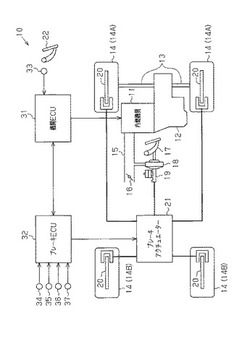
図1に示すように、車両10には、駆動源としての内燃機関11が搭載されている。そして、内燃機関11の出力トルクは、複数の変速段を備えた多段式の自動変速機12および車軸13を介して車輪14に伝達されるようになっている。なお車両10は、その前部の車輪14が内燃機関11の出力トルクの伝達される駆動輪14Aとして機能するとともに、後部の車輪14が同出力トルクの伝達されない従動輪14Bとして機能する、いわゆる前輪駆動車である。
【0025】
この車両10には、内燃機関11の吸気通路15におけるスロットルバルブ16の下流に発生する吸気負圧を利用してブレーキペダル17の踏み込み操作力(踏力)を倍力して伝えるブレーキブースター18が設けられている。また車両10には、ブレーキブースター18により倍力されたブレーキペダル17の踏力に応じてブレーキ液圧(マスターシリンダー圧)を発生させるマスターシリンダー19が取り付けられている。さらに車両10には、マスターシリンダー19の発生するブレーキ液圧に応じて動作して各車輪14にそれぞれ設けられたディスクブレーキ装置20に制動力を付与するブレーキアクチュエーター21が取り付けられている。
【0026】
また車両10には、内燃機関11の運転を制御する電子制御ユニット(機関ECU31)とブレーキアクチュエーター21の作動を制御する電子制御ユニット(ブレーキECU32)とが設けられている。
【0027】
これら機関ECU31およびブレーキECU32には、車両10の運転状況を検出するセンサやスイッチの検出信号が入力されている。例えば機関ECU31には、アクセルペダル22の踏み込み操作量(アクセル踏込量Othr)を検出するアクセルセンサ33の検出信号が入力されている。また、ブレーキECU32には、車両10の前後方向に作用する加速度(実加速度G)を検出する加速度センサ34の検出信号や、ブレーキペダル17の踏み込みの有無を検出するブレーキスイッチ35の信号が入力されている。さらにブレーキECU32には、各車輪14の回転速度(車輪速VSO)を検出する速度センサ36の検出信号や、ブレーキブースター18の内部に形成される負圧(ブースター負圧Pv)を検出する圧力センサ37の検出信号なども入力されている。
【0028】
なお、上記加速度センサ34としては一軸の検出軸(詳しくは、加速度を精度よく検出することのできる方向)を有するものが採用されており、同加速度センサ34はその検出軸と車両10の進行方向(詳しくは、前後方向)とが一致するように車両10に取り付けられている。また速度センサ36は各車輪14に一つずつ設けられている。
【0029】
機関ECU31とブレーキECU32との間では、データ通信を通じて、各種の情報が交信されている。そうしたデータとしては、センサやスイッチにより検出される情報の他、自動変速機12において選択されている変速段(ギア位置Pgear)や、内燃機関11の運転状態をもとに把握される同内燃機関11の出力トルク(機関トルクTeng)等が挙げられる。機関トルクTengは例えばスロットルバルブ16の開度から演算により求められる。
【0030】
そして、機関ECU31は、各種センサやスイッチの検出結果により把握される車両10の運転状況に応じて内燃機関11の運転制御を実行する。またブレーキECU32は、ブレーキアクチュエーター21の制御ソレノイドを操作することにより、ABS(アンチロック・ブレーキ・システム)やブレーキアシスト、ESC(エレクトロニック・スタビリティ・コントロール)といったブレーキシステムの作動制御を実行する。
【0031】
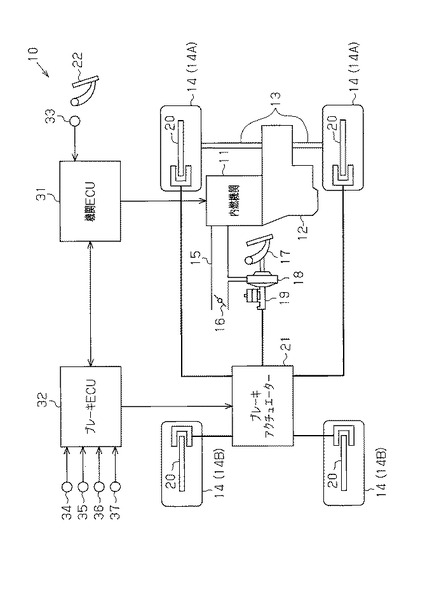
以下、上記ブレーキブースター18の構造について詳細に説明する。
図2に示すように、ブレーキブースター18の内部には定圧室23および変圧室24の二つの圧力室が区画形成されている。このうちの定圧室23は、図示しないチェック弁を介して内燃機関11の吸気通路15(図1参照)に連通されており、吸気負圧によってその内部に負圧(具体的には、大気圧よりも低い圧力)が導入されるようになっている。なお、ブレーキブースター18のブースター負圧とは、定圧室23内の負圧(大気圧と定圧室23の圧力との差圧)のことである。
【0032】
また、ブレーキブースター18には、真空弁25および大気弁26の二つの弁が設けられている。真空弁25が開弁されると定圧室23と変圧室24とが連通される一方、同真空弁25が閉弁されると定圧室23と変圧室24との連通が遮断される。また大気弁26が開弁されると変圧室24が大気開放される。
【0033】
さらに、ブレーキブースター18の内部にはピストン27が配設されている。このピストン27によって定圧室23と変圧室24との間が仕切られている。ピストン27は、ブレーキペダル17に連結されるとともに、同ブレーキペダル17の踏み込み操作に伴い移動可能な状態で配設されている。
【0034】
そして、ブレーキペダル17が踏み込み操作されていないとき(ブレーキ非作動時)には、真空弁25が開弁されるとともに大気弁26が閉弁されるようになっている。このとき定圧室23および変圧室24が連通されて、これらの内部に内燃機関11の吸気負圧が導入されるために、定圧室23の圧力と変圧室24の圧力とはほぼ等しくなる。
【0035】
一方、ブレーキペダル17が踏み込み操作されたとき(ブレーキ作動時)には、真空弁25が閉弁されるとともに大気弁26が開弁されるようになっている。このとき定圧室23および変圧室24の連通が遮断されるとともに同変圧室24の内圧が徐々に大気圧に近づくために、定圧室23の圧力が変圧室24の圧力より高くなる。そして、この定圧室23および変圧室24の圧力差によってピストン27が押圧されることによってブレーキペダル17の踏み込み操作が助勢される。
【0036】
車両10は、ブレーキペダル17とアクセルペダル22とが誤って同時に踏み込み操作された状態になった場合に、これに起因する同車両10の加速や発進を抑えるべく、内燃機関11の出力を制限するシステム(BOS[ブレーキ・オーバーライド・システム])を備えている。このシステムでは、アクセル踏込量Othrが第1判定値α以上であり、且つブレーキペダル17の踏力(詳しくは、マスターシリンダー圧の推定値[後述するマスター圧推定値PesPm])が第2判定値β以上であるときに、内燃機関11の出力トルクが制限される。これにより、ブレーキペダル17およびアクセルペダル22の同時踏み込みに起因する車両10の加速や発進が抑えられる。
【0037】
ここで上記車両10では、その製造コストの削減を実現するために、ブレーキペダル17の踏力を検出するセンサが省略されている。単に上記センサを省略すると、そのときどきのブレーキペダル17の踏力を把握することができなくなるため、BOSによってブレーキペダル17およびアクセルペダル22の同時踏み込みに起因する車両10の加速や発進を抑えることができなくなってしまう。
【0038】
そこで本実施の形態では、機関ECU31により算出される内燃機関11の出力トルク(前記機関トルクTeng)と加速度センサ34により検出される実加速度Gとに基づいてブレーキペダル17の踏力を推定するようにしている。そして、その推定した値(具体的には、後述するマスター圧推定値PesPm)に基づいてブレーキECU32による内燃機関11の出力制限が行われるようになっている。
【0039】
ブレーキペダル17の踏み込み操作によって車両10が減速することから明らかなように、同ブレーキペダル17の踏力と車両10の加速度とには相関がある。この点をふまえて本実施の形態では、加速度センサ34により検出される実加速度Gに基づいてマスター圧推定値PesPmが算出されるとともに、同マスター圧推定値PesPmが上記BOSにおいて用いられる。
【0040】
マスター圧推定値PesPmの算出は、具体的には、次のような考えのもとに行われる。先ず、加速度センサ34によって車両10の実加速度Gが検出されるとともに、機関トルクTengに基づいて内燃機関11の運転によって得られる車両10の加速度(機関加速度)が把握される。そして、それら実加速度Gおよび機関加速度の関係に基づいてブレーキペダル17の踏み込み操作による車両10の加速度変化分が把握される。さらに、この加速度変化分を車両10の特性により定まる変換係数によってブレーキペダル17の踏力に変換することにより、上記マスター圧推定値PesPmが算出される。
【0041】
本実施の形態では、このマスター圧推定値PesPmに基づいてブレーキペダル17の踏力が第2判定値β以上になっていることを精度よく判断することができる。そのため、そうしたマスター圧推定値PesPmに基づく判断とアクセルセンサ33により検出したアクセル踏込量Othrが第1判定値α以上であるとの判断とをもとに、ブレーキペダル17およびアクセルペダル22の同時踏み込みを精度よく判定したうえで、内燃機関11の出力制限を的確に行うことができる。したがって、ブレーキペダル17の踏み込み操作量を検出するためのセンサを設けることなく、ブレーキペダル17およびアクセルペダル22の同時踏み込みに起因する車両10の加速や発進を抑えることができる。
【0042】
ブレーキブースター18は、ブレーキペダル17が踏み込み操作されると、ブースター負圧が大気圧に近づく構造になっている。そのため、ブレーキペダル17の踏み込み操作が短時間において繰り返し行われると、ブースター負圧が殆ど無くなった状態(ほぼ大気圧になった状態)になって、ブレーキブースター18による助勢が殆ど無い状態でブレーキペダル17が踏み込まれる状況になってしまう。この場合には、ブレーキペダル17の踏み込み操作による車両10の減速度合いが小さくなってしまうために、ブレーキペダル17の実際の踏力と内燃機関11の出力トルク(機関トルクTeng)と車両10の実加速度Gとの関係が変化してしまい、上述したマスター圧推定値PesPmの推定精度の低下を招いてしまう。
【0043】
この点をふまえて本実施の形態では、マスター圧推定値PesPmの推定パラメータの一つとして、圧力センサ37によって検出されるブースター負圧Pvを用いるようにしている。これにより、マスター圧推定値PesPmを、ブースター負圧Pvの変化による影響を考慮しつつ精度よく算出することができる。
【0044】
また、ブレーキペダル17が同一の力で踏み込まれた場合であっても、車両10の重量に応じて同車両10の実際の減速度合いは異なる。そのため、車両10の重量に応じて、ブレーキペダル17の実際の踏力と内燃機関11の出力トルク(機関トルクTeng)と車両10の実加速度Gとの関係が変化すると云える。そして、車両重量は、同車両10に載せられた荷物の重量や、内燃機関11の燃料の残量、搭乗者数などに応じて変化する。そのため、そうした車両10の重量の変化に起因して、マスター圧推定値PesPmの推定精度の低下を招くおそれがある。
【0045】
そのため本実施の形態では、車両10の重量を推定するとともに、その推定した値(後述する積載量推定値PesW)をマスター圧推定値PesPmの推定パラメータの一つとして用いるようにしている。これにより、上記マスター圧推定値PesPmを、車両10の重量の変化による影響を考慮しつつ精度よく推定することができる。
【0046】
さらに、本実施の形態のように、加速度センサ34により検出される実加速度Gに基づいてマスター圧推定値PesPmを算出するとともに同マスター圧推定値PesPmを前記BOSにおいて用いる場合、次のような不都合が発生するおそれがある。
【0047】
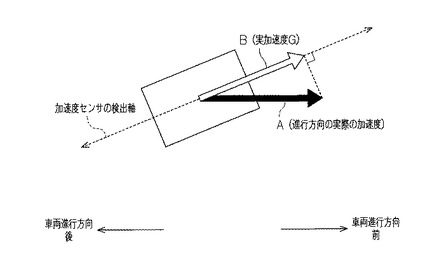
本実施の形態では、加速度センサ34の検出軸と車両10の前後方向とが一致するように同加速度センサ34が車両10に取り付けられている。車両10の走行時においては、その走行速度の変化に伴って車両前部が車両後部に対して沈み込んだり、あるいは車両後部が車両前部に対して沈み込んだりする現象(いわゆるピッチング現象)が生じることがある。そうしたピッチング現象が発生すると、走行路面に対する車両10の姿勢が変化するために、同車両10に取り付けられた加速度センサ34の姿勢も変化する。
【0048】
そのため、図3に示すように、このとき加速度センサ34の検出軸と車両10の進行方向(詳しくは、平坦路の走行時において路面と並行になる方向)とがずれた状態になって、同車両10の進行方向における実際の加速度(図中に矢印Aで示す値)と加速度センサ34によって検出される実加速度G(図中に矢印Bで示す値)と間にずれが生じてしまう。なお図3は、車両後部が車両前部に対して沈み込んだ状態での車両進行方向における実際の加速度と実加速度Gとの関係の一例を示している。同図から明らかなように、ピッチング現象が発生すると、車両進行方向における実際の加速度より加速度センサ34によって検出される実加速度Gが小さくなる。こうしたピッチング現象の発生に起因する加速度センサ34の検出値(実加速度G)の変化は、上述のように実加速度Gに基づいてマスター圧推定値PesPmを算出する場合においてその算出精度を低下させる一因になってしまう。なお図3は、実加速度Gの変化の理解を容易にするために、加速度センサ34の検出軸と車両10の進行方向とのずれを誇張して示している。
【0049】
この点をふまえて本実施の形態では、ピッチング現象による車両10の姿勢変化分に応じた補正値(ピッチング補正値Gp)を算出するとともに、同ピッチング補正値Gpを上記マスター圧推定値PesPmの推定パラメータの一つとして用いるようにしている。
【0050】
本実施の形態では、ピッチング補正値Gpが車両10の走行時と停止時とにおいて異なる態様で算出される。以下、そうしたピッチング補正値Gpの算出態様について説明する。
【0051】
ここでは先ず、車両10の走行時におけるピッチング補正値Gpの算出態様について説明する。
車両10の走行中におけるピッチング現象は同車両10の走行速度の変化に伴って発生する。そして、車両10の走行速度の変化度合いが大きいときほど、ピッチング現象の発生時における車両10の姿勢変化分も大きくなる。このことから車両10の走行中においては、同車両10の進行方向における走行速度の推移をもとに、ピッチング現象の発生に起因する車両10の姿勢変化分を把握することが可能になると云える。
【0052】
そのため本実施の形態では、車両10の走行時において、そうした車両10の進行方向における走行速度の推移(具体的には、各速度センサ36により検出される車輪速VSOに基づき推定される車両10の加速度[後述する推定車体加速度ΔVref])に基づいて上記ピッチング補正値Gpが算出される。
【0053】
これにより、車両10の走行中において、速度センサ36によって検出される車両10の走行速度の推移、すなわちピッチング現象による車両10の姿勢変化分と相関のある値に基づいてピッチング補正値Gpを算出することができる。そして、このピッチング補正値Gpによって上記姿勢変化に起因する推定精度の低下を抑えつつ、マスター圧推定値PesPmを精度よく算出することができる。
【0054】
次に、車両10の停止時におけるピッチング補正値Gpの算出態様について説明する。
車両10の停止時におけるピッチング現象は、内燃機関11から車軸13に伝達される駆動トルクによって発生する。そして、この駆動トルクが大きいときほど、ピッチング現象の発生時における車両10の姿勢変化分も大きくなる。このことから車両10の停止時においては、車軸13に伝達される駆動トルクをもとに、ピッチング現象の発生に起因する車両10の姿勢変化分を把握することが可能になると云える。
【0055】
この点をふまえて本実施の形態では、車両10の停止時において、車軸13に伝達される駆動トルクに基づいてピッチング補正値Gpを算出するようにしている。なお、上記駆動トルクは、内燃機関11の出力トルク(機関トルクTeng)、ギア位置Pgearに基づき算出される自動変速機12のギア比Rtgear、自動変速機12に一体に設けられたファイナルギアのギア比Rfinalに基づき算出することができる。
【0056】
これにより、車両10の停止時において、車軸13に伝達される駆動トルク、すなわちピッチング現象による車両10の姿勢変化分と相関のある値に基づいてピッチング補正値Gpを算出することができる。そして、このピッチング補正値Gpによって上記姿勢変化に起因する推定精度の低下を抑えつつ、マスター圧推定値PesPmを精度よく算出することができる。
【0057】
このように本実施の形態では、ピッチング現象の発生による車両10の姿勢変化によって車両10の進行方向における実際の加速度と加速度センサ34によって検出される実加速度Gとの間にずれが生じる場合であっても、同車両10の姿勢変化分に応じた値(ピッチング補正値Gp)による補正を通じてマスター圧推定値PesPmを精度よく推定することができる。
【0058】
また、上述したピッチング現象の発生に起因する不都合の他にも、次のような不都合が発生するおそれがある。車両10が摩擦係数の低い路面(例えば凍結路)を走行するときやアクセルペダル22の踏み込み操作量が大きいために車軸13に伝達される駆動トルクが大きいときなどにおいて車輪14がスリップすることがあり、そうしたスリップが発生すると、これに伴って車両10の運転状態(詳しくは、機関トルクTeng、実加速度G、ブレーキペダル17の踏力の関係)が変化する。こうした車両10のスリップの有無による運転状態の変化は、本実施の形態の装置のように車両10の運転状態に基づいてマスター圧推定値PesPmを算出する装置では、同マスター圧推定値PesPmの推定精度を低下させる一因になってしまう。
【0059】
そのため本実施の形態では、車両10のスリップの発生を判定するとともに同スリップが発生したと判定されたときに、前記BOSによる内燃機関11の出力制限の実行を禁止するようにしている。これにより、車両10のスリップが発生したとき、すなわち機関トルクTengと実加速度Gとブレーキペダル17の踏力との関係が変化したときには、上記マスター圧推定値PesPmの推定精度が低いとして、同マスター圧推定値PesPmが大きいことをもって内燃機関11の出力制限が行われることを回避することができる。
【0060】
以下、前記BOSによって内燃機関11の出力トルクを制限する処理(トルク制限処理)について詳細に説明する。
図4および図5は、上記トルク制限処理の具体的な実行手順を示すフローチャートであり、それらフローチャートに示される一連の処理は、ブレーキスイッチ35がオン操作されていることを条件に実行される所定時間(例えば数ミリ秒)毎の処理として、ブレーキECU32により実行される。
【0061】
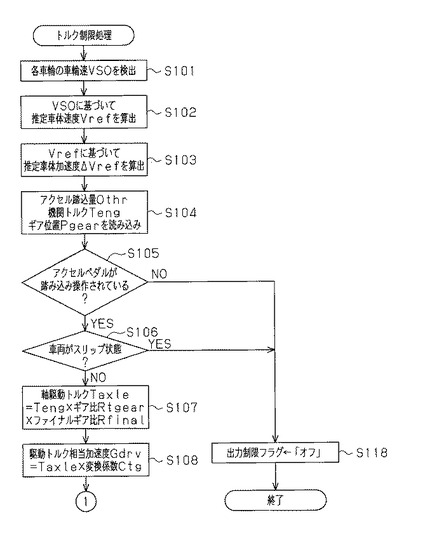
図4に示すように、この処理では先ず、速度センサ36によって各車輪14の車輪速VSOがそれぞれ検出される(ステップS101)。
そして、各車輪速VSOに基づいて車両10の走行速度についての推定値(推定車体速度Vref)が算出される(ステップS102)。具体的には、各車輪速VSOのうちの最も高い速度を示す値が推定車体速度Vrefとして算出される。
【0062】
また、この推定車体速度Vrefに基づいて車両10の加速度についての推定値(推定車体加速度ΔVref)が算出される(ステップS103)。具体的には、本処理の前回実行時における推定車体速度Vref[i−1]と今回実行時における推定車体速度Vref[i]との差(=Vref[i]−Vref[i−1])が推定車体加速度ΔVrefとして算出される。
【0063】
さらに、機関ECU31によって検出(あるいは算出)されて記憶されているアクセル踏込量Othr、機関トルクTeng、およびギア位置Pgearが読み込まれる(ステップS104)。本実施の形態では、このステップS104の処理が出力算出工程として機能する。
【0064】
その後、アクセルペダル22が踏み込み操作されているか否かが判断される(ステップS105)。この処理では具体的には、アクセル踏込量Othrが所定量以上であることをもって、アクセルペダル22が踏み込み操作されていると判断される。
【0065】
そして、アクセルペダル22が踏み込み操作されていないと判断される場合には(ステップS105:NO)、前述したブレーキペダル17とアクセルペダル22との同時踏み込みによる車両10の加速や発進が生じるおそれはないとして、出力制限フラグがオフ操作された後(ステップS118)、本処理は一旦終了される。
【0066】
一方、アクセルペダル22が踏み込み操作されていると判断される場合には(ステップS105:YES)、車両10がスリップ状態であるか否かが判断される(ステップS106)。この処理では、車輪速VSOと推定車体速度Vrefとの差ΔVSOが車輪14毎に算出されるとともに、それら差ΔVSOのいずれかが判定値J1以上であることをもって、車両10がスリップ状態であると判断される。なお上記判定値J1としては、マスター圧推定値PesPmを精度よく算出することのできない程度に各車輪14のいずれかかがスリップしていることを的確に判断することの可能な値が実験やシミュレーションの結果をもとに予め求められてブレーキECU32に記憶されている。そして、車両10がスリップ状態であると判断される場合には(ステップS106:YES)、このときマスター圧推定値PesPmを精度よく算出することができないために内燃機関11の出力トルクの制限を的確に行うことができないとして、出力制限フラグがオフ操作された後(ステップS118)、本処理は一旦終了される。
【0067】
なお、上記出力制限フラグは次のように作用するフラグである。すなわち、出力制限フラグがオン操作されると、内燃機関11の出力トルクを制限させる必要がある旨の信号が機関ECU31に出力される。この信号を受けて機関ECU31は、アクセル踏込量Othrによることなく、内燃機関11の運転制御をアイドル運転時における制御態様に変更する。これにより、内燃機関11の出力トルクが小さく抑えられて、ブレーキペダル17の踏み込み操作による制動力に抗して車両10が加速したり発進したりすることが抑えられる。一方、出力制限フラグがオフ操作されているときには、そうした機関ECU31への信号出力が行われず、内燃機関11の出力トルクの制限も行われない。したがって本処理では、アクセルペダル22が踏み込み操作されていないときや車両10がスリップ状態であるときには、内燃機関11の出力トルクの制限が行われない。
【0068】
一方、アクセルペダル22が踏み込み操作されていると判断され(ステップS105:YES)、且つ車両10がスリップ状態でないと判断される場合には(ステップS106:NO)、両ペダル17,22の同時操作による車両10の加速や発進が生じるおそれがあり、且つマスター圧推定値PesPmを精度良く算出可能であるとして、以下の処理が実行される。
【0069】
すなわち先ず、機関トルクTengと、ギア位置Pgearに基づき算出される自動変速機12のギア比Rtgearと、自動変速機12に一体に設けられたファイナルギアのギア比Rfinalとに基づいて以下の関係式から、内燃機関11から車軸13に伝達される駆動トルク(軸駆動トルクTaxle)が算出される(ステップS107)。
【0070】
Taxle=Teng×Rtgear×Rfinal
そして、この軸駆動トルクTaxleが、変換係数Ctgを通じて、車両10の加速度に相当する値(駆動トルク相当加速度Gdrv)に変換される(ステップS108)。詳しくは、軸駆動トルクTaxleに変換係数Ctgを乗算することによって駆動トルク相当加速度Gdrv(=Taxle×Ctg)が算出される。この変換係数Ctgは、車軸13に伝達される駆動トルクを車両10の加速度に変換するための値であり、車両10の諸元などから定まる一定の値である。この変換係数Ctgは、予め求められた上でブレーキECU32に記憶されている。
【0071】
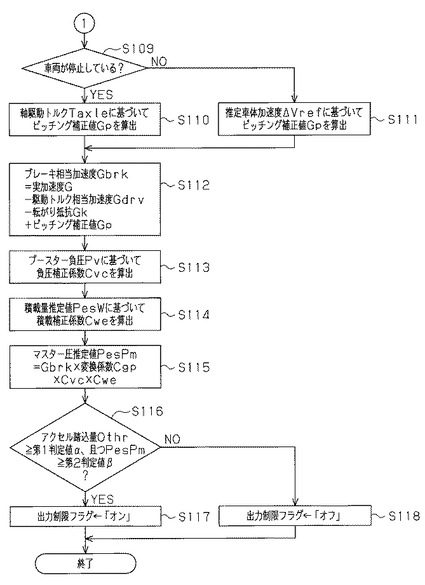
その後、図5に示すように、車両10が停止しているか否かが判断される(ステップS109)。ここでは、推定車体速度Vrefが「0」(または、ほぼ「0」)になっていることをもって、車両10が停止していると判断される。
【0072】
そして、車両10が停止していると判断されるときには(ステップS109:YES)、上記軸駆動トルクTaxleに基づいて演算マップからピッチング補正値Gpが算出される(ステップS110)。本実施の形態では、ピッチング現象の発生に起因する実加速度Gの検出誤差分を的確に補正可能な値(ピッチング補正値Gp)と車両停止時における軸駆動トルクTaxleとの関係が実験やシミュレーションの結果をもとに予め求められてブレーキECU32(詳しくは、上記演算マップ)に記憶されている。そして、軸駆動トルクTaxleが大きいときほど、ピッチング補正値Gpとして大きい値が算出される。
【0073】
一方、車両10が停止しておらず走行中であると判断されるときには(ステップS109:NO)、推定車体加速度ΔVrefに基づいて演算マップからピッチング補正値Gpが算出される(ステップS111)。本実施の形態では、ピッチング現象の発生に起因する実加速度Gの検出誤差分を的確に補正可能な値(ピッチング補正値Gp)と車両走行時における推定車体加速度ΔVrefとの関係が実験やシミュレーションの結果をもとに予め求められてブレーキECU32(上記演算マップ)に記憶されている。そして、推定車体加速度ΔVrefの絶対値が大きいときほど、ピッチング補正値Gpとして大きい値が算出される。
【0074】
このようにして車両10の走行状態に応じてピッチング補正値Gpが算出された後、実加速度G、駆動トルク相当加速度Gdrv、転がり抵抗Gk、ピッチング補正値Gpに基づいて以下の関係式から、ブレーキペダル17の踏み込み操作によって生じる加速度に相当する値(ブレーキ相当加速度Gbrk)が算出される(ステップS112)。
【0075】
Gbrk=G−Gdrv−Gk+Gp
なお、転がり抵抗Gkとしては車種毎に設定されている標準タイヤの諸元(具体的には、サイズや材質)により定まる一定の値が予めブレーキECU32に記憶されている。
【0076】
その後、圧力センサ37によって検出されるブースター負圧Pvに基づいて演算マップから、負圧補正係数Cvcが算出される(ステップS113)。本実施の形態では、ブースター負圧Pvとマスター圧推定値PesPmを精度よく算出可能な補正値(負圧補正係数Cvc)との関係が実験やシミュレーションの結果をもとに予め求められてブレーキECU32(詳しくは、上記演算マップ)に記憶されている。そして、ブースター負圧Pvが小さいときほど、負圧補正係数Cvcとして大きい値が算出される。
【0077】
また、車両重量の推定値(積載量推定値PesW)に基づいて演算マップから、積載補正係数Cweが算出される(ステップS114)。本実施の形態では、積載量推定値PesWとマスター圧推定値PesPmを精度よく算出可能な補正値(積載補正係数Cwe)との関係が実験やシミュレーションの結果をもとに予め求められてブレーキECU32(詳しくは、上記演算マップ)に記憶されている。そして、積載量推定値PesWが大きいときほど、積載補正係数Cweとして大きい値が算出される。
【0078】
なお、上記積載量推定値PesWは本処理とは別の処理(積載量推定処理)を通じて算出されてブレーキECU32に記憶されており、本処理の実行に際してはその記憶値が読み込まれる。積載量推定処理において上記積載量推定値PesWを算出および記憶する処理は、以下の実行条件が全て満たされるときに実行される。
・車両10の運転を開始するべく運転スイッチ(図示略)がオン操作されてから同車両10の運転を停止するべく運転スイッチがオフ操作されるまでの期間(いわゆるトリップ中)において、積載量推定値PesWが算出された履歴がないこと。
・ブレーキペダル17が踏み込み操作されていないこと(具体的には、ブレーキスイッチ35がオフ操作されていること)。
・車両10が走行中であること(具体的には、推定車体速度Vrefが所定速度以上であること)。
【0079】
そして、積載量推定値PesWの算出は次のように実行される。すなわち加速度センサ34によって検出される実加速度Gを[a]とし、機関トルクTengを車両10に付与される力[F]とした場合に、運動方程式[F=ma]を満たす車両10の重量[m]に相当する値が前記積載量推定値PesWとして算出される。このように本実施の形態では、積載量推定値PesWが運動方程式[F=ma]をもとに精度よく算出される。
【0080】
負圧補正係数Cvc(ステップS113)および積載補正係数Cwe(ステップS114)が算出された後、ブレーキ相当加速度Gbrk、変換係数Cgp、負圧補正係数Cvc、積載補正係数Cweに基づいて以下の関係式から、マスター圧推定値PesPmが算出される(ステップS115)。
【0081】
PesPm=Gbrk×Cgp×Cvc×Cwe
なお、上記変換係数Cgpは、車両10の加速度をブレーキペダル17の踏力に変換するための値であり、同車両10の諸元などから定まる一定の値である。この変換係数Cgpは、予め求められた上でブレーキECU32に記憶されている。本実施の形態では、ステップS107,S108,S112〜S115の処理が踏力推定工程として機能する。
【0082】
その後、以下の[条件イ]および[条件ロ]が共に満たされるか否かが判断される(ステップS116)。
[条件イ]アクセル踏込量Othrが第1判定値α以上であること。
[条件ロ]マスター圧推定値PesPmが第2判定値β以上であること。
【0083】
なお、第1判定値αおよび第2判定値βとしては、ブレーキペダル17およびアクセルペダル22の同時踏み込みに起因して車両10が加速したり発進したりする可能性があることを適正に判断することの可能な値が、実験やシミュレーションの結果をもとに予め求められて設定されている。
【0084】
そして、[条件イ]および[条件ロ]が共に満たされる場合には(ステップS116:YES)、両ペダル17,22の同時踏み込みに起因する車両10の加速や発進を招く可能性があるとして、出力制限フラグがオン操作される(ステップS117)。これにより、内燃機関11の出力トルクが制限されて、両ペダル17,22の同時踏み込みに起因する車両10の加速や発進が抑えられる。本実施の形態では、ステップS116,S117の処理がトルク制限工程として機能する。
【0085】
一方、[条件イ]および[条件ロ]の一方でも満たされない場合には(ステップS116:NO)、出力制限フラグがオフ操作される(ステップS118)。この場合には、内燃機関11の出力トルクが制限されない。
【0086】
このようにして、マスター圧推定値PesPmをもとに、出力制限フラグが操作された後、本処理は一旦終了される。
以上説明したように、本実施の形態によれば、以下に記載する効果が得られるようになる。
【0087】
(1)機関ECU31により算出される機関トルクTengと加速度センサ34により検出される実加速度Gとに基づいてマスター圧推定値PesPmを算出するとともに、同マスター圧推定値PesPmに基づいてブレーキECU32による内燃機関11の出力制限を行うようにした。そのため、マスター圧推定値PesPmが第2判定値β以上であるとの判断とアクセルセンサ33により検出したアクセル踏込量Othrが第1判定値α以上であるとの判断とをもとに、ブレーキペダル17およびアクセルペダル22の同時踏み込みを精度よく判定したうえで、内燃機関11の出力制限を的確に行うことができる。したがって、ブレーキペダル17の踏み込み操作量を検出するためのセンサを設けることなく、ブレーキペダル17およびアクセルペダル22の同時踏み込みに起因する車両10の加速や発進を抑えることができる。
【0088】
(2)マスター圧推定値PesPmの推定パラメータの一つとして、圧力センサ37によって検出されるブースター負圧Pvを用いるようにした。そのため、マスター圧推定値PesPmを、ブースター負圧Pvの変化による影響を考慮しつつ精度よく算出することができる。
【0089】
(3)積載量推定値PesWをマスター圧推定値PesPmの推定パラメータの一つとして用いるようにした。そのため、マスター圧推定値PesPmを、車両10の重量の変化による影響を考慮しつつ精度よく推定することができる。
【0090】
(4)加速度センサ34によって検出される実加速度Gを[a]とし、機関トルクTengを車両10に付与される力[F]とした場合に、運動方程式[F=ma]を満たす車両10の重量[m]に相当する値を積載量推定値PesWとして算出するようにした。そのため、積載量推定値PesWを運動方程式[F=ma]をもとに精度よく算出することができる。
【0091】
(第2の実施の形態)
以下、本発明の車両制御装置を具体化した第2の実施の形態について、上記第1の実施の形態との相違点を中心に説明する。なお本実施の形態にあって、第1の実施の形態と共通する構成については、同一の符号を付してその詳細な説明は省略する。
【0092】
第1の実施の形態では、車両10がスリップ状態であるときには、前記BOSによる内燃機関11の出力制限の実行が禁止される。これに対して、本実施の形態では、車両10がスリップ状態であっても、車両10の駆動輪14Aと従動輪14Bとの回転速度差ΔVが判定値J2以上であるときには、前記BOSによる内燃機関11の出力制限を禁止しないようにしている。こうした本実施の形態の装置によれば、ブレーキペダル17およびアクセルペダル22の同時操作による車両10の加速や発進が的確に抑えられる。以下、その理由について説明する。
【0093】
車両10では、内燃機関11の出力トルクが駆動輪14Aのみに伝達されるのに対して、ブレーキペダル17の踏み込み操作による制動力は駆動輪14Aおよび従動輪14Bの双方に作用する。そのため、ブレーキペダル17およびアクセルペダル22の同時操作時においてスリップが生じると、駆動輪14Aの回転速度と従動輪14Bとの回転速度との差が大きくなる。そして、この回転速度差は、アクセルペダル22の踏み込み操作量が大きいときほど大きくなる。
【0094】
この点をふまえて本実施の形態の装置では、両ペダル17,22の同時操作時において車両10がスリップしているために前記マスター圧推定値PesPmの推定精度が低いときであっても、同車両10の駆動輪14Aと従動輪14Bとの回転速度差が大きいことをもって、このとき車両10の加速や発進を招くおそれがあることを精度よく判断することができる。そして、そうした判断をもって内燃機関11の出力制限を実行することができるため、両ペダル17,22の同時踏み込みに起因する車両10の加速や発進を的確に抑えることができる。
【0095】
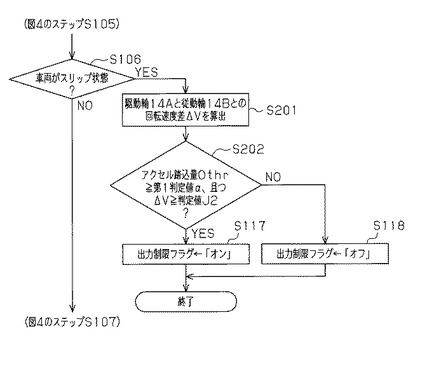
以下、そうした回転速度差に基づいて判断する処理を含む本実施の形態のトルク制限処理について図6を参照しつつ説明する。
図6に示すように、車両10がスリップ状態であると判断される場合には(ステップS106:YES)、車両10の駆動輪14Aと従動輪14Bとの回転速度差ΔVが算出される(ステップS201)。この回転速度差ΔVとしては、具体的には、二つの駆動輪14Aの車輪速VSOの平均値から二つの従動輪14Bの車輪速VSOの平均値を減算した値が算出される。
【0096】
その後、前記[条件イ]と以下の[条件ハ]とが共に満たされるか否かが判断される(ステップS202)。
[条件ハ]駆動輪14Aと従動輪14Bとの回転速度差ΔVが判定値J2以上であること。
【0097】
なお判定値J2としては、両ペダル17,22の同時操作による車両10の加速や発進が生じる可能性があることを的確に判断することの可能な値が実験やシミュレーションの結果をもとに予め求められてブレーキECU32に記憶されている。本実施の形態では、上記[条件ハ]が満たされることをもって、ブレーキペダル17とアクセルペダル22との同時操作によって従動輪14Bの回転速度より駆動輪14Aの回転速度が高く且つその回転速度差が大きいこと、すなわち両ペダル17,22の同時操作に起因する車両10の加速や発進を招く可能性があることを的確に判断することができる。
【0098】
そして、[条件イ]および[条件ハ]が共に満たされると判断される場合には(ステップS202:YES)、両ペダル17,22の同時踏み込みに起因する車両10の加速や発進を招く可能性があるとして、出力制限フラグがオン操作される(ステップS117)。これにより、内燃機関11の出力トルクが制限されて、両ペダル17,22の同時踏み込みに起因する車両10の加速や発進が抑えられる。
【0099】
一方、[条件イ]および[条件ハ]の一方でも満たされない場合には(ステップS202:NO)、出力制限フラグがオフ操作される(ステップS118)。この場合には、マスター圧推定値PesPmを精度よく算出することができないばかりか、上記回転速度差ΔVが両ペダル17,22の同時踏み込みに起因する車両10の加速や発進を招く可能性があることを示す値になっていないとして、内燃機関11の出力トルクが制限されない。
【0100】
このようにして、駆動輪14Aと従動輪14Bとの回転速度差ΔVをもとに、出力制限フラグが操作された後、本処理は一旦終了される。
他方、車両10がスリップ状態ではないと判断される場合には(ステップS106:NO)、このときマスター圧推定値PesPmを精度よく算出することができるとして、前述したステップS107以降の処理(図4および図5参照)が実行される。
【0101】
以上説明したように、本実施の形態によれば、先の(1)〜(4)に記載の効果と同様の効果が得られる。
(第3の実施の形態)
以下、本発明の車両制御装置を具体化した第3の実施の形態について、上記第1の実施の形態との相違点を中心に説明する。なお本実施の形態にあって、第1の実施の形態と共通する構成については、同一の符号を付してその詳細な説明は省略する。
【0102】
第1の実施の形態では、圧力センサ37によって検出されるブースター負圧Pvに基づいて負圧補正係数Cvcが算出されるとともに、同負圧補正係数Cvcがマスター圧推定値PesPmの推定パラメータとして用いられる。これに対して本実施の形態では、圧力センサ37が設けられない。そのため、負圧補正係数Cvcが算出されず、マスター圧推定値PesPmが負圧補正係数Cvcを用いることなく推定される。そして本実施の形態では、ブレーキスイッチ35により検出されるブレーキペダル17の踏み込み操作の実行頻度が判定値以上になったときに、前記[条件ロ]の第2判定値βを小さい値に変更するようにしている。こうした構成によれば、以下のような作用が得られる。
【0103】
前述したようにブレーキペダル17の踏み込み操作が短時間において繰り返し行われてブースター負圧が殆ど無くなった状態(ほぼ大気圧になった状態)になると、ブレーキブースター18による助勢が殆ど無い状態でブレーキペダル17が踏み込まれる状況になってしまう。この場合には、ブレーキペダル17の実際の踏力に対する車両10の減速度合いが小さくなるために、その分だけ前記マスター圧推定値PesPmが小さい値(低い圧力を示す値)になってしまう。
【0104】
本実施の形態では、そうしたブースター負圧の変化に起因するマスター圧推定値PesPmの変化に合わせて、同マスター圧推定値PesPmをもとに判断される[条件ロ]の閾値(第2判定値β)が小さい値に変更される。これにより、ブレーキペダル17の踏み込み操作が短時間において繰り返し行われたとき、すなわちブースター負圧が小さくなっているときに、そうでないときと比較して、マスター圧推定値PesPmが小さい状況において内燃機関11の出力制限の実行が許可される。そのため、このとき車両10の減速度合いが小さくなってマスター圧推定値PesPmが小さくなるとはいえ、これに合わせて内燃機関11の出力制限についての実行条件(具体的には、[条件ロ])を変更することができ、内燃機関11の出力制限を的確に行うことができる。
【0105】
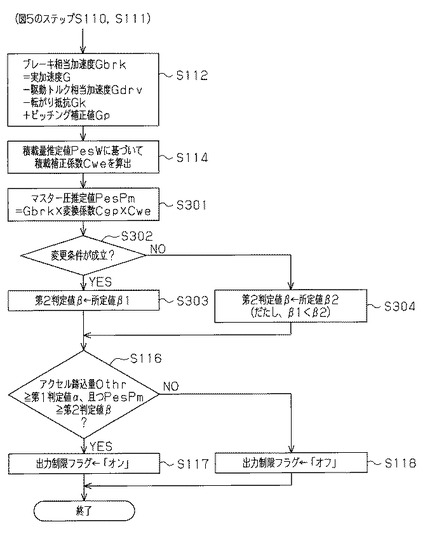
以下、本実施の形態のトルク制限処理について図7を参照しつつ説明する。
図7に示すように、本処理では、前記実加速度G、駆動トルク相当加速度Gdrv、転がり抵抗Gk、ピッチング補正値Gpに基づいて以下の関係式から、ブレーキ相当加速度Gbrkが算出される(ステップS112)。
【0106】
Gbrk=G−Gdrv−Gk+Gp
その後、積載量推定値PesWに基づいて積載補正係数Cweが算出される(ステップS114)。そして、ブレーキ相当加速度Gbrk、変換係数Cgp、積載補正係数Cweに基づいて以下の関係式から、マスター圧推定値PesPmが算出される(ステップS301)。
【0107】
PesPm=Gbrk×Cgp×Cwe
その後、上記第2判定値βを変更する変更条件が成立しているか否かが判断される(ステップS302)。ここでは、以下の[条件ニ]が満たされ、且つ[条件ホ]〜[条件ト]のいずれかが満たされることをもって変更条件が成立していると判断される。
[条件ニ]アクセル踏込量Othrが第1判定値α以上であり、且つ同アクセル踏込量Othrの単位時間あたりの変化量が所定値以下であること。
[条件ホ]上記[条件ニ]が満たされた状態が継続されている間にブレーキスイッチ35がオン操作された回数が所定回数(例えば三回)以上であること。
[条件ヘ]上記[条件ニ]が満たされた状態が継続されている間にブレーキスイッチ35が所定時間(例えば1秒)未満の間隔でオン操作されたこと。
[条件ト]上記[条件ニ]が満たされた状態で上記[条件ホ]および[条件ヘ]のいずれかが満たされた後の経過時間が所定時間未満であること。
【0108】
そして、上記変更条件が成立している場合には(ステップS302:YES)、ブレーキペダル17の高い頻度での踏み込み操作によってブースター負圧が小さい状態になっているとして、第2判定値βに所定値β1が定められる(ステップS303)。本実施の形態では、[条件ホ]や[条件へ]が満たされることをもって、ブレーキペダル17の踏み込み操作の実行頻度が第3判定値以上になったと判断される。なお、所定値β1としては、ブレーキペダル17とアクセルペダル22との同時操作による車両10の加速や発進を招く可能性があることを前記[条件ロ]を通じて的確に判断可能な値であって、ブースター負圧が小さくなった状況に適した値が実験やシミュレーションの結果をもとに予め求められてブレーキECU32に記憶されている。
【0109】
一方、上記変更条件が成立していない場合には(ステップS302:NO)、ブースター負圧が小さい状態になっている可能性は低いとして、第2判定値βに所定値β2が定められる(ステップS304)。なお、所定値β2としては、ブレーキペダル17とアクセルペダル22との同時操作による車両10の加速や発進を招く可能性があることを前記[条件ロ]を通じて的確に判断可能な値であって、ブースター負圧が小さくなっていない状況に適した値が実験やシミュレーションの結果をもとに予め求められてブレーキECU32に記憶されている。この所定値β2としては、上記所定値β1より大きい値が設定される。
【0110】
このように第2判定値βが設定された後、前記[条件イ]および[条件ロ]が共に満たされるか否かが判断される(ステップS116)。
そして、[条件イ]および[条件ロ]が共に満たされる場合には(ステップS116:YES)、両ペダル17,22の同時踏み込みに起因する車両10の加速や発進を招く可能性があるとして、出力制限フラグがオン操作される(ステップS117)。これにより、内燃機関11の出力トルクが制限されて、両ペダル17,22の同時踏み込みに起因する車両10の加速や発進が抑えられる。
【0111】
一方、[条件イ]および[条件ロ]の一方でも満たされない場合には(ステップS116:NO)、出力制限フラグがオフ操作される(ステップS118)。この場合には、内燃機関11の出力トルクが制限されない。
【0112】
このようにして、マスター圧推定値PesPmをもとに、出力制限フラグが操作された後、本処理は一旦終了される。
以上説明したように、本実施の形態によれば、先の(1)、(3)および(4)に記載の効果に加えて、以下の(5)に記載する効果が得られるようになる。
【0113】
(5)ブレーキスイッチ35により検出されるブレーキペダル17の踏み込み操作の実行頻度が判定値以上になったときに、前記[条件ロ]の第2判定値βを小さい値に変更するようにした。そのため、ブースター負圧の変化に起因するマスター圧推定値PesPmの変化に合わせて同マスター圧推定値PesPmをもとに判断される[条件ロ]の閾値(第2判定値β)を小さい値に変更することができ、内燃機関11の出力制限を的確に行うことができる。
【0114】
(その他の実施の形態)
なお、上記各実施の形態は、以下のように変更して実施してもよい。
・各実施の形態において、車両10の重量(具体的には、積載量推定値PesW)を算出する方法は、運動方程式を通じて算出する方法に限らず、任意の算出方法を採用することができる。そうした車両重量の算出に用いる算出パラメータとしては、例えば着座センサやシートベルトスイッチの信号に基づき把握される搭乗者数や、燃料残量センサによって検出される燃料タンク内の燃料残量、車高センサによって検出される車高などを採用することができる。これら算出パラメータを採用する場合には、搭乗者数が多いほど、燃料残量が多いほど、車高が低いほど、車両10の重量として重い値を算出するようにすればよい。
【0115】
・各実施の形態において、積載補正係数Cweを、マップ演算を通じて算出することに代えて、予め定められた関係式をもとに算出するようにしてもよい。
・各実施の形態において、積載量推定値PesWをマスター圧推定値PesPmの推定パラメータとして用いることに代えて、積載量推定値PesWに応じて[条件ロ]の第2判定値βを可変設定してもよい。こうした構成においては、積載量推定値PesWが大きいときほど、第2判定値βとして小さい値を設定すればよい。同構成によれば、同一の踏力でブレーキペダル17を操作した場合であっても車両重量が重いときほど車両10の減速度合いが小さくなってマスター圧推定値PesPmが小さい値になるとはいえ、そうしたマスター圧推定値PesPmの変化に合わせて第2判定値βを変更することができる。したがって、ブレーキペダル17とアクセルペダル22との同時操作による車両10の加速や発進を的確に抑えることができる。
【0116】
・各実施の形態において、積載量推定値PesWを算出する構成や、積載量推定値PesWをマスター圧推定値PesPmの推定パラメータとして用いる構成を省略することができる。
【0117】
・第1および第2の実施の形態において、圧力センサ37によって検出されるブースター負圧Pvに基づいて負圧補正係数Cvcを算出することに代えて、マスターシリンダー圧の指標値に基づいて負圧補正係数を算出するようにしてもよい。なお、マスターシリンダー圧の指標値としては、例えばブレーキスイッチ35により検出されるブレーキペダル17の踏み込み操作タイミングや、ブレーキペダル17の踏み込み操作の継続時間、ブレーキペダル17の踏み込みが解除された後の経過時間などを採用することができる。
【0118】
・第1および第2の実施の形態において、負圧補正係数Cvcを、マップ演算を通じて算出することに代えて、予め定められた関係式をもとに算出するようにしてもよい。
・第1および第2の実施の形態において、ブースター負圧Pvをマスター圧推定値PesPmの推定パラメータとして用いることに代えて、ブースター負圧Pvに応じて[条件ロ]の第2判定値βを可変設定してもよい。同構成においては、ブースター負圧Pvが小さいときほど、すなわちブレーキブースター18の定圧室23の圧力と大気圧との差圧が小さいときほど、第2判定値βとして小さい値を設定すればよい。同構成によれば、同一の踏力でブレーキペダル17を操作した場合であってもブースター負圧Pvが小さいときほど車両10の減速度合いが小さくなってマスター圧推定値PesPmが小さい値になるとはいえ、そうしたマスター圧推定値PesPmの変化に合わせて第2判定値βを変更することができる。したがって、ブレーキペダル17とアクセルペダル22との同時操作による車両10の加速や発進を的確に抑えることができる。
【0119】
・第1および第2の実施の形態において、圧力センサ37や、圧力センサ37によって検出されるブースター負圧Pvをマスター圧推定値PesPmの推定パラメータとして用いる構成を省略してもよい。
【0120】
・各実施の形態の車両制御装置は、前部の車輪14が内燃機関11の出力トルクの伝達されない従動輪として機能するとともに、後部の車輪14が同出力トルクの伝達される駆動輪として機能する、いわゆる後輪駆動車にも適用することができる。
【0121】
・第1および第3の実施の形態の車両制御装置は、例えば四輪駆動車などといった全ての車輪が駆動輪である車両にも適用することができる。
・各実施の形態において、車両10がスリップ状態であることを判定する方法は任意に変更することができる。車両10がスリップ状態であることを判定する条件としては、例えば「各車輪14の車輪速VSOの最大値と最小値との差が所定値以上であること」との条件や、「各車輪14の車輪速VSOの平均値といずれかの車輪14の車輪速VSOとの差が所定値以上であること」との条件を設定することができる。また速度センサ36により検出される車輪速VSOに基づきスリップ状態を判定する方法に限らず、自動変速機12のギア位置Pgearと推定車体速度Vrefとの関係をもとにスリップ状態を判定することなども可能である。
【0122】
・第2の実施の形態において、ブレーキペダル17およびアクセルペダル22の同時操作時に同ブレーキペダル17の踏み込み操作の実行頻度が高くなったことを判定可能な条件であれば、変更条件は任意に変更することができる。例えば前記[条件ニ]に代えて、「アクセル踏込量Othrが第1判定値α以上であること」との条件を設定することができる。また[条件ト]を省略したり、[条件ホ]および[条件ヘ]の一方を省略したりしてもよい。
【0123】
・第1および第3の実施の形態において、車両10がスリップ状態であるときに内燃機関11の出力制限の実行を禁止する処理(図4のステップS106の処理)を省略してもよい。
【0124】
・各実施の形態の車両制御装置は、加速度センサの検出軸と平坦路での車両停止時において路面に並行になる方向とが一致するように同加速度センサが取り付けられた車両であれば、二軸の検出軸を有する加速度センサが採用された車両にも適用することができる。
【0125】
・各実施の形態において、推定車体加速度ΔVrefを車輪速VSOに基づき算出することに代えて、車軸13の回転速度を検出するとともにその検出値に基づき推定車体加速度を算出するようにしてもよい。
【0126】
・各実施の形態において、機関トルクTengとして機関ECU31から受信した値を用いることに代えて、車両10の運転状態(具体的には、アクセル踏込量Othrや、機関回転速度、吸入空気量など)に基づいてブレーキECU32により機関トルクを算出して用いるようにしてもよい。
【0127】
・各実施の形態において、ピッチング補正値Gpを、マップ演算を通じて算出することに代えて、予め定められた関係式をもとに算出するようにしてもよい。
・各実施の形態において、車両10の姿勢角を検出する姿勢角センサや車高を検出する車高センサを設けるとともに同センサの検出信号に基づいて車両10の姿勢変化分を検出し、その検出値に基づいてピッチング補正値Gpを算出するようにしてもよい。
【0128】
・各実施の形態において、ピッチング補正値Gpを、車両停止時および車両走行時のいずれか一方においてのみ算出するようにしてもよい。
・各実施の形態において、ピッチング補正値Gpを算出する処理や、同ピッチング補正値Gpをマスター圧推定値PesPmの推定パラメータとして用いる構成を省略してもよい。この場合には、推定車体加速度ΔVrefを算出する処理を省略することもできる。
【0129】
・第2の実施の形態の構成と第3の実施の形態の構成とを組み合わせて実施することができる。
・各実施の形態では、内燃機関11の運転制御をアイドル運転時における制御態様に変更することによって、同内燃機関11の出力トルクを制限するようにした。これに代えて、内燃機関11の出力トルクに上限値を設定したり、内燃機関11の運転(具体的には、燃料噴射や点火動作)を停止したりしてもよい。また、内燃機関11の出力トルクを制限することに代えて、自動変速機12をニュートラル状態にするようにしてもよい。要は、内燃機関11から車両10の車軸13に伝達される駆動トルクを制限することにより、ブレーキペダル17およびアクセルペダル22の同時操作による車両10の加速や発進を抑えることができる。
【0130】
・各実施の形態において、推定車体速度Vrefを車輪速VSOに基づき算出することに代えて、車軸13の回転速度を推定車体速度として検出するようにしてもよい。
・各実施の形態において、マスター圧推定値PesPmを算出することに代えて、ブレーキペダル17の踏力そのものの推定値を算出するようにしてもよい。要は、ブレーキペダル17の踏力の指標値や同踏力そのものを推定するととともに、その推定値した値(ブレーキ踏力推定値)に基づいてブレーキペダル17およびアクセルペダル22の同時踏み込みを判定すればよい。
【符号の説明】
【0131】
10…車両、11…内燃機関、12…自動変速機、13…車軸、14…車輪、14A…駆動輪、14B…従動輪、15…吸気通路、16…スロットルバルブ、17…ブレーキペダル、18…ブレーキブースター、19…マスターシリンダー、20…ディスクブレーキ装置、21…ブレーキアクチュエーター、22…アクセルペダル、23…定圧室、24…変圧室、25…真空弁、26…大気弁、27…ピストン、31…機関ECU(出力算出手段)、32…ブレーキECU(踏力推定手段、トルク制限手段、変更手段、重量算出手段)、33…アクセルセンサ、34…加速度センサ、35…ブレーキスイッチ、36…速度センサ、37…圧力センサ。
【技術分野】
【0001】
本発明は、アクセルペダルおよびブレーキペダルが同時に踏み込み操作された状態になったときに車軸に伝達される駆動トルクを制限する車両制御装置および車両制御方法に関するものである。
【背景技術】
【0002】
近年、アクセルペダルがフロアマットに引っ掛かった状況でブレーキペダルが踏み込まれたりするなどして、アクセルペダルとブレーキペダルとが同時に踏み込まれた状態になる事象の発生が報告されている。この場合、アクセルペダルの踏み込み操作量が大きいと、乗員によってブレーキペダルが踏み込み操作されているのにも関わらず、同車両が加速したり発進したりするといった状況になってしまう。
【0003】
従来、特許文献1には、アクセルペダルおよびブレーキペダルの同時操作時において、センサによって検出したブレーキペダルの踏み込み操作量(あるいは、その指標値[例えば、ブレーキ作動圧力])が判定値より大きくなったときに、車載内燃機関の出力を制限することが提案されている。なお上記判定値としては、乗員によって意図的に両ペダルが踏み込まれる状況であれば通常とり得ないブレーキペダルの踏み込み操作量に相当する値が設定される。
【0004】
こうした装置によれば、アクセルペダルとブレーキペダルとが誤って同時に踏み込まれた状態になった場合であっても、ブレーキペダルの踏み込み操作量が大きくなれば、アクセルペダルの踏み込み操作が乗員により意図された操作ではないとして、ブレーキペダルの踏み込み操作が優先されて、車載内燃機関の出力が制限される。その結果、アクセルペダルおよびブレーキペダルの同時踏み込みに起因する車両の加速や発進が抑えられるようになる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2005−291030号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ここで、車両の製造コストの削減を実現するために、ブレーキペダルの踏み込み操作量を検出するためのセンサを廃止することが検討されている。この場合、単に上記センサを廃止すると、そのときどきのブレーキペダルの踏み込み操作量を把握することができなくなるために、上述したアクセルペダルおよびブレーキペダルの同時踏み込みに起因する車両の加速や発進を抑えることができなくなってしまう。
【0007】
本発明は、そうした実情に鑑みてなされたものであり、その目的は、ブレーキペダルの踏み込み操作量を検出するためのセンサを設けることなく、アクセルペダルおよびブレーキペダルの同時踏み込みに起因する車両の加速や発進を精度よく抑えることのできる車両制御装置および車両制御方法を提供することにある。
【課題を解決するための手段】
【0008】
以下、上記目的を達成するための手段及びその作用効果について説明する。
本発明の車両制御装置は、
駆動源としての内燃機関(11)と、車両加速度を検出する加速度センサ(34)と、アクセルペダル(22)の踏み込み操作量を検出するアクセルセンサ(33)とを備えた車両(10)に適用されて、前記内燃機関(11)の出力トルクを算出する出力算出手段(31、S104)と、前記加速度センサ(34)により検出した前記車両加速度および、前記出力算出手段(31、S104)により算出した前記出力トルクに基づいてブレーキペダル(17)の踏み込み操作力を推定する踏力推定手段(32、S107,S108,S112,S115)と、前記アクセルセンサ(33)により検出される前記踏み込み操作量が第1判定値以上であり、且つ前記踏力推定手段(32、S107,S108,S112,S115)により推定される前記踏み込み操作力が第2判定値以上であるときに、前記内燃機関(11)から車軸(13)に伝達される駆動トルクを制限するトルク制限手段(32、S116,S117)とを備えることをその要旨とする。
【0009】
上記構成によれば、加速度センサによって車両の実加速度を検出することができるとともに、内燃機関の出力トルクに基づいて同内燃機関の運転によって得られる車両の加速度(機関加速度)を把握することができる。そのため、それら実加速度と機関加速度との関係に基づいてブレーキペダルの踏み込み操作による車両の加速度変化分を把握することができ、その加速度変化分をもとにブレーキペダルの踏み込み操作力(踏力)を精度よく推定することができる。そして、その推定した値(ブレーキ踏力推定値)に基づいてブレーキペダルの踏力が第2判定値以上になっていることを精度よく判断することができる。そのため、そうしたブレーキ踏力推定値に基づく判断とアクセルセンサにより検出したアクセルペダルの踏み込み操作量が第1判定値以上であるとの判断とをもとに、アクセルペダルおよびブレーキペダルの同時踏み込みを精度よく判定したうえで、内燃機関から車軸に伝達される駆動トルクの制限を的確に行うことができる。したがって、ブレーキペダルの踏み込み操作量を検出するためのセンサを設けることなく、アクセルペダルおよびブレーキペダルの同時踏み込みに起因する車両の加速や発進を抑えることができる。
【0010】
本発明の車両制御において、前記車両(10)は、前記内燃機関(11)の吸気負圧を利用して形成されたブースター負圧により前記ブレーキペダル(17)の踏み込み操作の助勢を行うブレーキブースター(18)を備えてなり、前記踏力推定手段(32、S107,S108,S112,S113,S115)は、前記ブースター負圧を前記踏み込み操作力の推定パラメータとして用いることが好ましい。
【0011】
車両に、内燃機関の吸気負圧を利用して形成されたブースター負圧によってブレーキペダルの踏み込み操作の助勢を行うブレーキブースターを設けることが多用されている。このブレーキブースターは、ブレーキペダルが踏み込み操作されると、ブースター負圧が大気圧に近づく構造になっている。そのため、ブレーキペダルの踏み込み操作が短時間において繰り返し行われると、ブースター負圧が殆ど無くなった状態(ほぼ大気圧になった状態)になって、ブレーキブースターによる助勢が殆ど無い状態でブレーキペダルが踏み込まれる状況になってしまい、ブレーキペダルの踏み込み操作による車両の減速度合いが小さくなってしまう。その結果、ブレーキペダルの実際の踏力と内燃機関の出力トルクと車両の実加速度との関係が変化してしまうために、上述した踏力推定手段によって推定されるブレーキ踏力指標値の推定精度の低下を招いてしまう。
【0012】
この点、上記構成によれば、ブースター負圧を推定パラメータの一つとして用いてブレーキ踏力推定値を算出することができるために、同ブレーキ踏力推定値を、ブースター負圧の変化による影響を考慮しつつ精度よく算出することができる。
【0013】
本発明の車両制御装置において、前記車両(10)は、前記ブレーキペダル(17)の踏み込み操作の有無を検出するブレーキスイッチ(35)を備えてなり、前記車両制御装置は、前記ブレーキスイッチ(35)により検出される前記ブレーキペダル(17)の踏み込み操作の実行頻度が第3判定値以上になったときに前記第2判定値を小さい値に変更する変更手段(32、S302,S303)を備えることが好ましい。
【0014】
上記構成によれば、ブレーキペダルの踏み込み操作が短時間において繰り返し行われたとき、すなわちブースター負圧が小さくなっているときには、そうでないときと比較して、前記ブレーキ踏力推定値が小さい状況において駆動トルクの制限の実行が許可される。そのため、このとき車両の減速度合いが小さくなって上記ブレーキ踏力推定値が小さくなるとはいえ、これに合わせて駆動トルクの制限についての実行条件を変更することができ、車両の駆動トルクの制限を的確に行うことができる。
【0015】
本発明の車両制御装置において、前記踏力推定手段(32、S107,S108,S112,S114,S115)は、前記車両(10)の重量を前記踏み込み操作力の推定パラメータとして用いることが好ましい。
【0016】
ブレーキペダルが同一の力で踏み込まれた場合であっても、車両の重量に応じて同車両の実際の減速度合いは異なる。そのため、車両の重量に応じて、ブレーキペダルの実際の踏力と内燃機関の出力トルクと車両の実加速度との関係が変化すると云える。車両の重量は、車両に載せられる荷物の重量や、内燃機関の燃料の残量、搭乗者数などに応じて変化する。そのため、そうした車両重量の変化に起因して、上述した踏力推定手段によって推定されるブレーキ踏力推定値の推定精度の低下を招いてしまう。
【0017】
この点、上記構成によれば、車両の重量を算出パラメータの一つとして用いてブレーキ踏力推定値を推定することができるために、同ブレーキ踏力推定値を、車両重量の変化による影響を考慮しつつ精度よく推定することができる。
【0018】
なお、本発明の車両制御装置においては、前記ブースター負圧を検出する圧力センサ(37)を備えた車両(10)において同圧力センサ(37)によって検出されるブースター負圧を前記踏力推定手段(32、S107,S108,S112,S113,S115)による踏み込み操作力の推定パラメータとして用いることができる。
【0019】
本発明の車両制御装置において、当該装置は、前記加速度センサ(34)により検出される前記車両加速度と前記出力算出手段(31、S104)によって算出される前記出力トルクとに基づいて前記車両(10)の重量を算出する重量算出手段(32)を備えることが好ましく、前記踏力推定手段(32、S107,S108,S112,S114,S115)は、前記重量算出手段(32)によって算出される重量を前記推定パラメータとして用いることが好ましい。
【0020】
上記構成によれば、加速度センサによって検出される車両の実加速度[a]と前記出力算出手段によって算出される内燃機関の出力トルク、すなわち車両を走行させるべく同車両に付与される力[F]とに基づいて運動方程式[F=ma]から、車両の重量[m]を精度よく算出することができる。
【0021】
本発明の車両制御方法は、駆動源としての内燃機関(11)と車両加速度を検出する加速度センサ(34)とアクセルペダル(22)の踏み込み操作量を検出するアクセルセンサ(33)とを備えた車両(10)の制御方法であって、前記内燃機関(11)の出力トルクを算出する出力算出工程(S104)と、前記加速度センサ(34)により検出した前記加速度および、前記出力算出工程(S104)において算出した前記出力トルクに基づいてブレーキペダル(17)の踏み込み操作力を推定する踏力推定工程(S107,S108,S112,S115)と、前記アクセルセンサ(33)により検出される前記踏み込み操作量が第1判定値以上であり、且つ前記踏力推定工程(S107,S108,S112,S115)において推定される前記踏み込み操作力が第2判定値以上であるときに、前記内燃機関(11)から車軸(13)に伝達される駆動トルクを制限するトルク制限工程(S116,S117)とを含むことを要旨とする。
【0022】
上記車両制御方法によれば、上記車両制御装置と同等の作用・効果を得ることができる。
【図面の簡単な説明】
【0023】
【図1】本発明の第1の実施の形態が適用される車両の概略構成を示す略図。
【図2】ブレーキブースターの断面構造を示す断面図。
【図3】ピッチング現象により発生する車両加速度の検出誤差分の説明図。
【図4】第1の実施の形態のトルク制限処理の実行手順を示すフローチャート。
【図5】同トルク制限処理の実行手順を示すフローチャート。
【図6】第2の実施の形態のトルク制限処理の実行手順を示すフローチャート。
【図7】第3の実施の形態のトルク制限処理の実行手順を示すフローチャート。
【発明を実施するための形態】
【0024】
(第1の実施の形態)
以下、本発明の車両制御装置を具体化した第1の実施の形態について説明する。
図1に示すように、車両10には、駆動源としての内燃機関11が搭載されている。そして、内燃機関11の出力トルクは、複数の変速段を備えた多段式の自動変速機12および車軸13を介して車輪14に伝達されるようになっている。なお車両10は、その前部の車輪14が内燃機関11の出力トルクの伝達される駆動輪14Aとして機能するとともに、後部の車輪14が同出力トルクの伝達されない従動輪14Bとして機能する、いわゆる前輪駆動車である。
【0025】
この車両10には、内燃機関11の吸気通路15におけるスロットルバルブ16の下流に発生する吸気負圧を利用してブレーキペダル17の踏み込み操作力(踏力)を倍力して伝えるブレーキブースター18が設けられている。また車両10には、ブレーキブースター18により倍力されたブレーキペダル17の踏力に応じてブレーキ液圧(マスターシリンダー圧)を発生させるマスターシリンダー19が取り付けられている。さらに車両10には、マスターシリンダー19の発生するブレーキ液圧に応じて動作して各車輪14にそれぞれ設けられたディスクブレーキ装置20に制動力を付与するブレーキアクチュエーター21が取り付けられている。
【0026】
また車両10には、内燃機関11の運転を制御する電子制御ユニット(機関ECU31)とブレーキアクチュエーター21の作動を制御する電子制御ユニット(ブレーキECU32)とが設けられている。
【0027】
これら機関ECU31およびブレーキECU32には、車両10の運転状況を検出するセンサやスイッチの検出信号が入力されている。例えば機関ECU31には、アクセルペダル22の踏み込み操作量(アクセル踏込量Othr)を検出するアクセルセンサ33の検出信号が入力されている。また、ブレーキECU32には、車両10の前後方向に作用する加速度(実加速度G)を検出する加速度センサ34の検出信号や、ブレーキペダル17の踏み込みの有無を検出するブレーキスイッチ35の信号が入力されている。さらにブレーキECU32には、各車輪14の回転速度(車輪速VSO)を検出する速度センサ36の検出信号や、ブレーキブースター18の内部に形成される負圧(ブースター負圧Pv)を検出する圧力センサ37の検出信号なども入力されている。
【0028】
なお、上記加速度センサ34としては一軸の検出軸(詳しくは、加速度を精度よく検出することのできる方向)を有するものが採用されており、同加速度センサ34はその検出軸と車両10の進行方向(詳しくは、前後方向)とが一致するように車両10に取り付けられている。また速度センサ36は各車輪14に一つずつ設けられている。
【0029】
機関ECU31とブレーキECU32との間では、データ通信を通じて、各種の情報が交信されている。そうしたデータとしては、センサやスイッチにより検出される情報の他、自動変速機12において選択されている変速段(ギア位置Pgear)や、内燃機関11の運転状態をもとに把握される同内燃機関11の出力トルク(機関トルクTeng)等が挙げられる。機関トルクTengは例えばスロットルバルブ16の開度から演算により求められる。
【0030】
そして、機関ECU31は、各種センサやスイッチの検出結果により把握される車両10の運転状況に応じて内燃機関11の運転制御を実行する。またブレーキECU32は、ブレーキアクチュエーター21の制御ソレノイドを操作することにより、ABS(アンチロック・ブレーキ・システム)やブレーキアシスト、ESC(エレクトロニック・スタビリティ・コントロール)といったブレーキシステムの作動制御を実行する。
【0031】
以下、上記ブレーキブースター18の構造について詳細に説明する。
図2に示すように、ブレーキブースター18の内部には定圧室23および変圧室24の二つの圧力室が区画形成されている。このうちの定圧室23は、図示しないチェック弁を介して内燃機関11の吸気通路15(図1参照)に連通されており、吸気負圧によってその内部に負圧(具体的には、大気圧よりも低い圧力)が導入されるようになっている。なお、ブレーキブースター18のブースター負圧とは、定圧室23内の負圧(大気圧と定圧室23の圧力との差圧)のことである。
【0032】
また、ブレーキブースター18には、真空弁25および大気弁26の二つの弁が設けられている。真空弁25が開弁されると定圧室23と変圧室24とが連通される一方、同真空弁25が閉弁されると定圧室23と変圧室24との連通が遮断される。また大気弁26が開弁されると変圧室24が大気開放される。
【0033】
さらに、ブレーキブースター18の内部にはピストン27が配設されている。このピストン27によって定圧室23と変圧室24との間が仕切られている。ピストン27は、ブレーキペダル17に連結されるとともに、同ブレーキペダル17の踏み込み操作に伴い移動可能な状態で配設されている。
【0034】
そして、ブレーキペダル17が踏み込み操作されていないとき(ブレーキ非作動時)には、真空弁25が開弁されるとともに大気弁26が閉弁されるようになっている。このとき定圧室23および変圧室24が連通されて、これらの内部に内燃機関11の吸気負圧が導入されるために、定圧室23の圧力と変圧室24の圧力とはほぼ等しくなる。
【0035】
一方、ブレーキペダル17が踏み込み操作されたとき(ブレーキ作動時)には、真空弁25が閉弁されるとともに大気弁26が開弁されるようになっている。このとき定圧室23および変圧室24の連通が遮断されるとともに同変圧室24の内圧が徐々に大気圧に近づくために、定圧室23の圧力が変圧室24の圧力より高くなる。そして、この定圧室23および変圧室24の圧力差によってピストン27が押圧されることによってブレーキペダル17の踏み込み操作が助勢される。
【0036】
車両10は、ブレーキペダル17とアクセルペダル22とが誤って同時に踏み込み操作された状態になった場合に、これに起因する同車両10の加速や発進を抑えるべく、内燃機関11の出力を制限するシステム(BOS[ブレーキ・オーバーライド・システム])を備えている。このシステムでは、アクセル踏込量Othrが第1判定値α以上であり、且つブレーキペダル17の踏力(詳しくは、マスターシリンダー圧の推定値[後述するマスター圧推定値PesPm])が第2判定値β以上であるときに、内燃機関11の出力トルクが制限される。これにより、ブレーキペダル17およびアクセルペダル22の同時踏み込みに起因する車両10の加速や発進が抑えられる。
【0037】
ここで上記車両10では、その製造コストの削減を実現するために、ブレーキペダル17の踏力を検出するセンサが省略されている。単に上記センサを省略すると、そのときどきのブレーキペダル17の踏力を把握することができなくなるため、BOSによってブレーキペダル17およびアクセルペダル22の同時踏み込みに起因する車両10の加速や発進を抑えることができなくなってしまう。
【0038】
そこで本実施の形態では、機関ECU31により算出される内燃機関11の出力トルク(前記機関トルクTeng)と加速度センサ34により検出される実加速度Gとに基づいてブレーキペダル17の踏力を推定するようにしている。そして、その推定した値(具体的には、後述するマスター圧推定値PesPm)に基づいてブレーキECU32による内燃機関11の出力制限が行われるようになっている。
【0039】
ブレーキペダル17の踏み込み操作によって車両10が減速することから明らかなように、同ブレーキペダル17の踏力と車両10の加速度とには相関がある。この点をふまえて本実施の形態では、加速度センサ34により検出される実加速度Gに基づいてマスター圧推定値PesPmが算出されるとともに、同マスター圧推定値PesPmが上記BOSにおいて用いられる。
【0040】
マスター圧推定値PesPmの算出は、具体的には、次のような考えのもとに行われる。先ず、加速度センサ34によって車両10の実加速度Gが検出されるとともに、機関トルクTengに基づいて内燃機関11の運転によって得られる車両10の加速度(機関加速度)が把握される。そして、それら実加速度Gおよび機関加速度の関係に基づいてブレーキペダル17の踏み込み操作による車両10の加速度変化分が把握される。さらに、この加速度変化分を車両10の特性により定まる変換係数によってブレーキペダル17の踏力に変換することにより、上記マスター圧推定値PesPmが算出される。
【0041】
本実施の形態では、このマスター圧推定値PesPmに基づいてブレーキペダル17の踏力が第2判定値β以上になっていることを精度よく判断することができる。そのため、そうしたマスター圧推定値PesPmに基づく判断とアクセルセンサ33により検出したアクセル踏込量Othrが第1判定値α以上であるとの判断とをもとに、ブレーキペダル17およびアクセルペダル22の同時踏み込みを精度よく判定したうえで、内燃機関11の出力制限を的確に行うことができる。したがって、ブレーキペダル17の踏み込み操作量を検出するためのセンサを設けることなく、ブレーキペダル17およびアクセルペダル22の同時踏み込みに起因する車両10の加速や発進を抑えることができる。
【0042】
ブレーキブースター18は、ブレーキペダル17が踏み込み操作されると、ブースター負圧が大気圧に近づく構造になっている。そのため、ブレーキペダル17の踏み込み操作が短時間において繰り返し行われると、ブースター負圧が殆ど無くなった状態(ほぼ大気圧になった状態)になって、ブレーキブースター18による助勢が殆ど無い状態でブレーキペダル17が踏み込まれる状況になってしまう。この場合には、ブレーキペダル17の踏み込み操作による車両10の減速度合いが小さくなってしまうために、ブレーキペダル17の実際の踏力と内燃機関11の出力トルク(機関トルクTeng)と車両10の実加速度Gとの関係が変化してしまい、上述したマスター圧推定値PesPmの推定精度の低下を招いてしまう。
【0043】
この点をふまえて本実施の形態では、マスター圧推定値PesPmの推定パラメータの一つとして、圧力センサ37によって検出されるブースター負圧Pvを用いるようにしている。これにより、マスター圧推定値PesPmを、ブースター負圧Pvの変化による影響を考慮しつつ精度よく算出することができる。
【0044】
また、ブレーキペダル17が同一の力で踏み込まれた場合であっても、車両10の重量に応じて同車両10の実際の減速度合いは異なる。そのため、車両10の重量に応じて、ブレーキペダル17の実際の踏力と内燃機関11の出力トルク(機関トルクTeng)と車両10の実加速度Gとの関係が変化すると云える。そして、車両重量は、同車両10に載せられた荷物の重量や、内燃機関11の燃料の残量、搭乗者数などに応じて変化する。そのため、そうした車両10の重量の変化に起因して、マスター圧推定値PesPmの推定精度の低下を招くおそれがある。
【0045】
そのため本実施の形態では、車両10の重量を推定するとともに、その推定した値(後述する積載量推定値PesW)をマスター圧推定値PesPmの推定パラメータの一つとして用いるようにしている。これにより、上記マスター圧推定値PesPmを、車両10の重量の変化による影響を考慮しつつ精度よく推定することができる。
【0046】
さらに、本実施の形態のように、加速度センサ34により検出される実加速度Gに基づいてマスター圧推定値PesPmを算出するとともに同マスター圧推定値PesPmを前記BOSにおいて用いる場合、次のような不都合が発生するおそれがある。
【0047】
本実施の形態では、加速度センサ34の検出軸と車両10の前後方向とが一致するように同加速度センサ34が車両10に取り付けられている。車両10の走行時においては、その走行速度の変化に伴って車両前部が車両後部に対して沈み込んだり、あるいは車両後部が車両前部に対して沈み込んだりする現象(いわゆるピッチング現象)が生じることがある。そうしたピッチング現象が発生すると、走行路面に対する車両10の姿勢が変化するために、同車両10に取り付けられた加速度センサ34の姿勢も変化する。
【0048】
そのため、図3に示すように、このとき加速度センサ34の検出軸と車両10の進行方向(詳しくは、平坦路の走行時において路面と並行になる方向)とがずれた状態になって、同車両10の進行方向における実際の加速度(図中に矢印Aで示す値)と加速度センサ34によって検出される実加速度G(図中に矢印Bで示す値)と間にずれが生じてしまう。なお図3は、車両後部が車両前部に対して沈み込んだ状態での車両進行方向における実際の加速度と実加速度Gとの関係の一例を示している。同図から明らかなように、ピッチング現象が発生すると、車両進行方向における実際の加速度より加速度センサ34によって検出される実加速度Gが小さくなる。こうしたピッチング現象の発生に起因する加速度センサ34の検出値(実加速度G)の変化は、上述のように実加速度Gに基づいてマスター圧推定値PesPmを算出する場合においてその算出精度を低下させる一因になってしまう。なお図3は、実加速度Gの変化の理解を容易にするために、加速度センサ34の検出軸と車両10の進行方向とのずれを誇張して示している。
【0049】
この点をふまえて本実施の形態では、ピッチング現象による車両10の姿勢変化分に応じた補正値(ピッチング補正値Gp)を算出するとともに、同ピッチング補正値Gpを上記マスター圧推定値PesPmの推定パラメータの一つとして用いるようにしている。
【0050】
本実施の形態では、ピッチング補正値Gpが車両10の走行時と停止時とにおいて異なる態様で算出される。以下、そうしたピッチング補正値Gpの算出態様について説明する。
【0051】
ここでは先ず、車両10の走行時におけるピッチング補正値Gpの算出態様について説明する。
車両10の走行中におけるピッチング現象は同車両10の走行速度の変化に伴って発生する。そして、車両10の走行速度の変化度合いが大きいときほど、ピッチング現象の発生時における車両10の姿勢変化分も大きくなる。このことから車両10の走行中においては、同車両10の進行方向における走行速度の推移をもとに、ピッチング現象の発生に起因する車両10の姿勢変化分を把握することが可能になると云える。
【0052】
そのため本実施の形態では、車両10の走行時において、そうした車両10の進行方向における走行速度の推移(具体的には、各速度センサ36により検出される車輪速VSOに基づき推定される車両10の加速度[後述する推定車体加速度ΔVref])に基づいて上記ピッチング補正値Gpが算出される。
【0053】
これにより、車両10の走行中において、速度センサ36によって検出される車両10の走行速度の推移、すなわちピッチング現象による車両10の姿勢変化分と相関のある値に基づいてピッチング補正値Gpを算出することができる。そして、このピッチング補正値Gpによって上記姿勢変化に起因する推定精度の低下を抑えつつ、マスター圧推定値PesPmを精度よく算出することができる。
【0054】
次に、車両10の停止時におけるピッチング補正値Gpの算出態様について説明する。
車両10の停止時におけるピッチング現象は、内燃機関11から車軸13に伝達される駆動トルクによって発生する。そして、この駆動トルクが大きいときほど、ピッチング現象の発生時における車両10の姿勢変化分も大きくなる。このことから車両10の停止時においては、車軸13に伝達される駆動トルクをもとに、ピッチング現象の発生に起因する車両10の姿勢変化分を把握することが可能になると云える。
【0055】
この点をふまえて本実施の形態では、車両10の停止時において、車軸13に伝達される駆動トルクに基づいてピッチング補正値Gpを算出するようにしている。なお、上記駆動トルクは、内燃機関11の出力トルク(機関トルクTeng)、ギア位置Pgearに基づき算出される自動変速機12のギア比Rtgear、自動変速機12に一体に設けられたファイナルギアのギア比Rfinalに基づき算出することができる。
【0056】
これにより、車両10の停止時において、車軸13に伝達される駆動トルク、すなわちピッチング現象による車両10の姿勢変化分と相関のある値に基づいてピッチング補正値Gpを算出することができる。そして、このピッチング補正値Gpによって上記姿勢変化に起因する推定精度の低下を抑えつつ、マスター圧推定値PesPmを精度よく算出することができる。
【0057】
このように本実施の形態では、ピッチング現象の発生による車両10の姿勢変化によって車両10の進行方向における実際の加速度と加速度センサ34によって検出される実加速度Gとの間にずれが生じる場合であっても、同車両10の姿勢変化分に応じた値(ピッチング補正値Gp)による補正を通じてマスター圧推定値PesPmを精度よく推定することができる。
【0058】
また、上述したピッチング現象の発生に起因する不都合の他にも、次のような不都合が発生するおそれがある。車両10が摩擦係数の低い路面(例えば凍結路)を走行するときやアクセルペダル22の踏み込み操作量が大きいために車軸13に伝達される駆動トルクが大きいときなどにおいて車輪14がスリップすることがあり、そうしたスリップが発生すると、これに伴って車両10の運転状態(詳しくは、機関トルクTeng、実加速度G、ブレーキペダル17の踏力の関係)が変化する。こうした車両10のスリップの有無による運転状態の変化は、本実施の形態の装置のように車両10の運転状態に基づいてマスター圧推定値PesPmを算出する装置では、同マスター圧推定値PesPmの推定精度を低下させる一因になってしまう。
【0059】
そのため本実施の形態では、車両10のスリップの発生を判定するとともに同スリップが発生したと判定されたときに、前記BOSによる内燃機関11の出力制限の実行を禁止するようにしている。これにより、車両10のスリップが発生したとき、すなわち機関トルクTengと実加速度Gとブレーキペダル17の踏力との関係が変化したときには、上記マスター圧推定値PesPmの推定精度が低いとして、同マスター圧推定値PesPmが大きいことをもって内燃機関11の出力制限が行われることを回避することができる。
【0060】
以下、前記BOSによって内燃機関11の出力トルクを制限する処理(トルク制限処理)について詳細に説明する。
図4および図5は、上記トルク制限処理の具体的な実行手順を示すフローチャートであり、それらフローチャートに示される一連の処理は、ブレーキスイッチ35がオン操作されていることを条件に実行される所定時間(例えば数ミリ秒)毎の処理として、ブレーキECU32により実行される。
【0061】
図4に示すように、この処理では先ず、速度センサ36によって各車輪14の車輪速VSOがそれぞれ検出される(ステップS101)。
そして、各車輪速VSOに基づいて車両10の走行速度についての推定値(推定車体速度Vref)が算出される(ステップS102)。具体的には、各車輪速VSOのうちの最も高い速度を示す値が推定車体速度Vrefとして算出される。
【0062】
また、この推定車体速度Vrefに基づいて車両10の加速度についての推定値(推定車体加速度ΔVref)が算出される(ステップS103)。具体的には、本処理の前回実行時における推定車体速度Vref[i−1]と今回実行時における推定車体速度Vref[i]との差(=Vref[i]−Vref[i−1])が推定車体加速度ΔVrefとして算出される。
【0063】
さらに、機関ECU31によって検出(あるいは算出)されて記憶されているアクセル踏込量Othr、機関トルクTeng、およびギア位置Pgearが読み込まれる(ステップS104)。本実施の形態では、このステップS104の処理が出力算出工程として機能する。
【0064】
その後、アクセルペダル22が踏み込み操作されているか否かが判断される(ステップS105)。この処理では具体的には、アクセル踏込量Othrが所定量以上であることをもって、アクセルペダル22が踏み込み操作されていると判断される。
【0065】
そして、アクセルペダル22が踏み込み操作されていないと判断される場合には(ステップS105:NO)、前述したブレーキペダル17とアクセルペダル22との同時踏み込みによる車両10の加速や発進が生じるおそれはないとして、出力制限フラグがオフ操作された後(ステップS118)、本処理は一旦終了される。
【0066】
一方、アクセルペダル22が踏み込み操作されていると判断される場合には(ステップS105:YES)、車両10がスリップ状態であるか否かが判断される(ステップS106)。この処理では、車輪速VSOと推定車体速度Vrefとの差ΔVSOが車輪14毎に算出されるとともに、それら差ΔVSOのいずれかが判定値J1以上であることをもって、車両10がスリップ状態であると判断される。なお上記判定値J1としては、マスター圧推定値PesPmを精度よく算出することのできない程度に各車輪14のいずれかかがスリップしていることを的確に判断することの可能な値が実験やシミュレーションの結果をもとに予め求められてブレーキECU32に記憶されている。そして、車両10がスリップ状態であると判断される場合には(ステップS106:YES)、このときマスター圧推定値PesPmを精度よく算出することができないために内燃機関11の出力トルクの制限を的確に行うことができないとして、出力制限フラグがオフ操作された後(ステップS118)、本処理は一旦終了される。
【0067】
なお、上記出力制限フラグは次のように作用するフラグである。すなわち、出力制限フラグがオン操作されると、内燃機関11の出力トルクを制限させる必要がある旨の信号が機関ECU31に出力される。この信号を受けて機関ECU31は、アクセル踏込量Othrによることなく、内燃機関11の運転制御をアイドル運転時における制御態様に変更する。これにより、内燃機関11の出力トルクが小さく抑えられて、ブレーキペダル17の踏み込み操作による制動力に抗して車両10が加速したり発進したりすることが抑えられる。一方、出力制限フラグがオフ操作されているときには、そうした機関ECU31への信号出力が行われず、内燃機関11の出力トルクの制限も行われない。したがって本処理では、アクセルペダル22が踏み込み操作されていないときや車両10がスリップ状態であるときには、内燃機関11の出力トルクの制限が行われない。
【0068】
一方、アクセルペダル22が踏み込み操作されていると判断され(ステップS105:YES)、且つ車両10がスリップ状態でないと判断される場合には(ステップS106:NO)、両ペダル17,22の同時操作による車両10の加速や発進が生じるおそれがあり、且つマスター圧推定値PesPmを精度良く算出可能であるとして、以下の処理が実行される。
【0069】
すなわち先ず、機関トルクTengと、ギア位置Pgearに基づき算出される自動変速機12のギア比Rtgearと、自動変速機12に一体に設けられたファイナルギアのギア比Rfinalとに基づいて以下の関係式から、内燃機関11から車軸13に伝達される駆動トルク(軸駆動トルクTaxle)が算出される(ステップS107)。
【0070】
Taxle=Teng×Rtgear×Rfinal
そして、この軸駆動トルクTaxleが、変換係数Ctgを通じて、車両10の加速度に相当する値(駆動トルク相当加速度Gdrv)に変換される(ステップS108)。詳しくは、軸駆動トルクTaxleに変換係数Ctgを乗算することによって駆動トルク相当加速度Gdrv(=Taxle×Ctg)が算出される。この変換係数Ctgは、車軸13に伝達される駆動トルクを車両10の加速度に変換するための値であり、車両10の諸元などから定まる一定の値である。この変換係数Ctgは、予め求められた上でブレーキECU32に記憶されている。
【0071】
その後、図5に示すように、車両10が停止しているか否かが判断される(ステップS109)。ここでは、推定車体速度Vrefが「0」(または、ほぼ「0」)になっていることをもって、車両10が停止していると判断される。
【0072】
そして、車両10が停止していると判断されるときには(ステップS109:YES)、上記軸駆動トルクTaxleに基づいて演算マップからピッチング補正値Gpが算出される(ステップS110)。本実施の形態では、ピッチング現象の発生に起因する実加速度Gの検出誤差分を的確に補正可能な値(ピッチング補正値Gp)と車両停止時における軸駆動トルクTaxleとの関係が実験やシミュレーションの結果をもとに予め求められてブレーキECU32(詳しくは、上記演算マップ)に記憶されている。そして、軸駆動トルクTaxleが大きいときほど、ピッチング補正値Gpとして大きい値が算出される。
【0073】
一方、車両10が停止しておらず走行中であると判断されるときには(ステップS109:NO)、推定車体加速度ΔVrefに基づいて演算マップからピッチング補正値Gpが算出される(ステップS111)。本実施の形態では、ピッチング現象の発生に起因する実加速度Gの検出誤差分を的確に補正可能な値(ピッチング補正値Gp)と車両走行時における推定車体加速度ΔVrefとの関係が実験やシミュレーションの結果をもとに予め求められてブレーキECU32(上記演算マップ)に記憶されている。そして、推定車体加速度ΔVrefの絶対値が大きいときほど、ピッチング補正値Gpとして大きい値が算出される。
【0074】
このようにして車両10の走行状態に応じてピッチング補正値Gpが算出された後、実加速度G、駆動トルク相当加速度Gdrv、転がり抵抗Gk、ピッチング補正値Gpに基づいて以下の関係式から、ブレーキペダル17の踏み込み操作によって生じる加速度に相当する値(ブレーキ相当加速度Gbrk)が算出される(ステップS112)。
【0075】
Gbrk=G−Gdrv−Gk+Gp
なお、転がり抵抗Gkとしては車種毎に設定されている標準タイヤの諸元(具体的には、サイズや材質)により定まる一定の値が予めブレーキECU32に記憶されている。
【0076】
その後、圧力センサ37によって検出されるブースター負圧Pvに基づいて演算マップから、負圧補正係数Cvcが算出される(ステップS113)。本実施の形態では、ブースター負圧Pvとマスター圧推定値PesPmを精度よく算出可能な補正値(負圧補正係数Cvc)との関係が実験やシミュレーションの結果をもとに予め求められてブレーキECU32(詳しくは、上記演算マップ)に記憶されている。そして、ブースター負圧Pvが小さいときほど、負圧補正係数Cvcとして大きい値が算出される。
【0077】
また、車両重量の推定値(積載量推定値PesW)に基づいて演算マップから、積載補正係数Cweが算出される(ステップS114)。本実施の形態では、積載量推定値PesWとマスター圧推定値PesPmを精度よく算出可能な補正値(積載補正係数Cwe)との関係が実験やシミュレーションの結果をもとに予め求められてブレーキECU32(詳しくは、上記演算マップ)に記憶されている。そして、積載量推定値PesWが大きいときほど、積載補正係数Cweとして大きい値が算出される。
【0078】
なお、上記積載量推定値PesWは本処理とは別の処理(積載量推定処理)を通じて算出されてブレーキECU32に記憶されており、本処理の実行に際してはその記憶値が読み込まれる。積載量推定処理において上記積載量推定値PesWを算出および記憶する処理は、以下の実行条件が全て満たされるときに実行される。
・車両10の運転を開始するべく運転スイッチ(図示略)がオン操作されてから同車両10の運転を停止するべく運転スイッチがオフ操作されるまでの期間(いわゆるトリップ中)において、積載量推定値PesWが算出された履歴がないこと。
・ブレーキペダル17が踏み込み操作されていないこと(具体的には、ブレーキスイッチ35がオフ操作されていること)。
・車両10が走行中であること(具体的には、推定車体速度Vrefが所定速度以上であること)。
【0079】
そして、積載量推定値PesWの算出は次のように実行される。すなわち加速度センサ34によって検出される実加速度Gを[a]とし、機関トルクTengを車両10に付与される力[F]とした場合に、運動方程式[F=ma]を満たす車両10の重量[m]に相当する値が前記積載量推定値PesWとして算出される。このように本実施の形態では、積載量推定値PesWが運動方程式[F=ma]をもとに精度よく算出される。
【0080】
負圧補正係数Cvc(ステップS113)および積載補正係数Cwe(ステップS114)が算出された後、ブレーキ相当加速度Gbrk、変換係数Cgp、負圧補正係数Cvc、積載補正係数Cweに基づいて以下の関係式から、マスター圧推定値PesPmが算出される(ステップS115)。
【0081】
PesPm=Gbrk×Cgp×Cvc×Cwe
なお、上記変換係数Cgpは、車両10の加速度をブレーキペダル17の踏力に変換するための値であり、同車両10の諸元などから定まる一定の値である。この変換係数Cgpは、予め求められた上でブレーキECU32に記憶されている。本実施の形態では、ステップS107,S108,S112〜S115の処理が踏力推定工程として機能する。
【0082】
その後、以下の[条件イ]および[条件ロ]が共に満たされるか否かが判断される(ステップS116)。
[条件イ]アクセル踏込量Othrが第1判定値α以上であること。
[条件ロ]マスター圧推定値PesPmが第2判定値β以上であること。
【0083】
なお、第1判定値αおよび第2判定値βとしては、ブレーキペダル17およびアクセルペダル22の同時踏み込みに起因して車両10が加速したり発進したりする可能性があることを適正に判断することの可能な値が、実験やシミュレーションの結果をもとに予め求められて設定されている。
【0084】
そして、[条件イ]および[条件ロ]が共に満たされる場合には(ステップS116:YES)、両ペダル17,22の同時踏み込みに起因する車両10の加速や発進を招く可能性があるとして、出力制限フラグがオン操作される(ステップS117)。これにより、内燃機関11の出力トルクが制限されて、両ペダル17,22の同時踏み込みに起因する車両10の加速や発進が抑えられる。本実施の形態では、ステップS116,S117の処理がトルク制限工程として機能する。
【0085】
一方、[条件イ]および[条件ロ]の一方でも満たされない場合には(ステップS116:NO)、出力制限フラグがオフ操作される(ステップS118)。この場合には、内燃機関11の出力トルクが制限されない。
【0086】
このようにして、マスター圧推定値PesPmをもとに、出力制限フラグが操作された後、本処理は一旦終了される。
以上説明したように、本実施の形態によれば、以下に記載する効果が得られるようになる。
【0087】
(1)機関ECU31により算出される機関トルクTengと加速度センサ34により検出される実加速度Gとに基づいてマスター圧推定値PesPmを算出するとともに、同マスター圧推定値PesPmに基づいてブレーキECU32による内燃機関11の出力制限を行うようにした。そのため、マスター圧推定値PesPmが第2判定値β以上であるとの判断とアクセルセンサ33により検出したアクセル踏込量Othrが第1判定値α以上であるとの判断とをもとに、ブレーキペダル17およびアクセルペダル22の同時踏み込みを精度よく判定したうえで、内燃機関11の出力制限を的確に行うことができる。したがって、ブレーキペダル17の踏み込み操作量を検出するためのセンサを設けることなく、ブレーキペダル17およびアクセルペダル22の同時踏み込みに起因する車両10の加速や発進を抑えることができる。
【0088】
(2)マスター圧推定値PesPmの推定パラメータの一つとして、圧力センサ37によって検出されるブースター負圧Pvを用いるようにした。そのため、マスター圧推定値PesPmを、ブースター負圧Pvの変化による影響を考慮しつつ精度よく算出することができる。
【0089】
(3)積載量推定値PesWをマスター圧推定値PesPmの推定パラメータの一つとして用いるようにした。そのため、マスター圧推定値PesPmを、車両10の重量の変化による影響を考慮しつつ精度よく推定することができる。
【0090】
(4)加速度センサ34によって検出される実加速度Gを[a]とし、機関トルクTengを車両10に付与される力[F]とした場合に、運動方程式[F=ma]を満たす車両10の重量[m]に相当する値を積載量推定値PesWとして算出するようにした。そのため、積載量推定値PesWを運動方程式[F=ma]をもとに精度よく算出することができる。
【0091】
(第2の実施の形態)
以下、本発明の車両制御装置を具体化した第2の実施の形態について、上記第1の実施の形態との相違点を中心に説明する。なお本実施の形態にあって、第1の実施の形態と共通する構成については、同一の符号を付してその詳細な説明は省略する。
【0092】
第1の実施の形態では、車両10がスリップ状態であるときには、前記BOSによる内燃機関11の出力制限の実行が禁止される。これに対して、本実施の形態では、車両10がスリップ状態であっても、車両10の駆動輪14Aと従動輪14Bとの回転速度差ΔVが判定値J2以上であるときには、前記BOSによる内燃機関11の出力制限を禁止しないようにしている。こうした本実施の形態の装置によれば、ブレーキペダル17およびアクセルペダル22の同時操作による車両10の加速や発進が的確に抑えられる。以下、その理由について説明する。
【0093】
車両10では、内燃機関11の出力トルクが駆動輪14Aのみに伝達されるのに対して、ブレーキペダル17の踏み込み操作による制動力は駆動輪14Aおよび従動輪14Bの双方に作用する。そのため、ブレーキペダル17およびアクセルペダル22の同時操作時においてスリップが生じると、駆動輪14Aの回転速度と従動輪14Bとの回転速度との差が大きくなる。そして、この回転速度差は、アクセルペダル22の踏み込み操作量が大きいときほど大きくなる。
【0094】
この点をふまえて本実施の形態の装置では、両ペダル17,22の同時操作時において車両10がスリップしているために前記マスター圧推定値PesPmの推定精度が低いときであっても、同車両10の駆動輪14Aと従動輪14Bとの回転速度差が大きいことをもって、このとき車両10の加速や発進を招くおそれがあることを精度よく判断することができる。そして、そうした判断をもって内燃機関11の出力制限を実行することができるため、両ペダル17,22の同時踏み込みに起因する車両10の加速や発進を的確に抑えることができる。
【0095】
以下、そうした回転速度差に基づいて判断する処理を含む本実施の形態のトルク制限処理について図6を参照しつつ説明する。
図6に示すように、車両10がスリップ状態であると判断される場合には(ステップS106:YES)、車両10の駆動輪14Aと従動輪14Bとの回転速度差ΔVが算出される(ステップS201)。この回転速度差ΔVとしては、具体的には、二つの駆動輪14Aの車輪速VSOの平均値から二つの従動輪14Bの車輪速VSOの平均値を減算した値が算出される。
【0096】
その後、前記[条件イ]と以下の[条件ハ]とが共に満たされるか否かが判断される(ステップS202)。
[条件ハ]駆動輪14Aと従動輪14Bとの回転速度差ΔVが判定値J2以上であること。
【0097】
なお判定値J2としては、両ペダル17,22の同時操作による車両10の加速や発進が生じる可能性があることを的確に判断することの可能な値が実験やシミュレーションの結果をもとに予め求められてブレーキECU32に記憶されている。本実施の形態では、上記[条件ハ]が満たされることをもって、ブレーキペダル17とアクセルペダル22との同時操作によって従動輪14Bの回転速度より駆動輪14Aの回転速度が高く且つその回転速度差が大きいこと、すなわち両ペダル17,22の同時操作に起因する車両10の加速や発進を招く可能性があることを的確に判断することができる。
【0098】
そして、[条件イ]および[条件ハ]が共に満たされると判断される場合には(ステップS202:YES)、両ペダル17,22の同時踏み込みに起因する車両10の加速や発進を招く可能性があるとして、出力制限フラグがオン操作される(ステップS117)。これにより、内燃機関11の出力トルクが制限されて、両ペダル17,22の同時踏み込みに起因する車両10の加速や発進が抑えられる。
【0099】
一方、[条件イ]および[条件ハ]の一方でも満たされない場合には(ステップS202:NO)、出力制限フラグがオフ操作される(ステップS118)。この場合には、マスター圧推定値PesPmを精度よく算出することができないばかりか、上記回転速度差ΔVが両ペダル17,22の同時踏み込みに起因する車両10の加速や発進を招く可能性があることを示す値になっていないとして、内燃機関11の出力トルクが制限されない。
【0100】
このようにして、駆動輪14Aと従動輪14Bとの回転速度差ΔVをもとに、出力制限フラグが操作された後、本処理は一旦終了される。
他方、車両10がスリップ状態ではないと判断される場合には(ステップS106:NO)、このときマスター圧推定値PesPmを精度よく算出することができるとして、前述したステップS107以降の処理(図4および図5参照)が実行される。
【0101】
以上説明したように、本実施の形態によれば、先の(1)〜(4)に記載の効果と同様の効果が得られる。
(第3の実施の形態)
以下、本発明の車両制御装置を具体化した第3の実施の形態について、上記第1の実施の形態との相違点を中心に説明する。なお本実施の形態にあって、第1の実施の形態と共通する構成については、同一の符号を付してその詳細な説明は省略する。
【0102】
第1の実施の形態では、圧力センサ37によって検出されるブースター負圧Pvに基づいて負圧補正係数Cvcが算出されるとともに、同負圧補正係数Cvcがマスター圧推定値PesPmの推定パラメータとして用いられる。これに対して本実施の形態では、圧力センサ37が設けられない。そのため、負圧補正係数Cvcが算出されず、マスター圧推定値PesPmが負圧補正係数Cvcを用いることなく推定される。そして本実施の形態では、ブレーキスイッチ35により検出されるブレーキペダル17の踏み込み操作の実行頻度が判定値以上になったときに、前記[条件ロ]の第2判定値βを小さい値に変更するようにしている。こうした構成によれば、以下のような作用が得られる。
【0103】
前述したようにブレーキペダル17の踏み込み操作が短時間において繰り返し行われてブースター負圧が殆ど無くなった状態(ほぼ大気圧になった状態)になると、ブレーキブースター18による助勢が殆ど無い状態でブレーキペダル17が踏み込まれる状況になってしまう。この場合には、ブレーキペダル17の実際の踏力に対する車両10の減速度合いが小さくなるために、その分だけ前記マスター圧推定値PesPmが小さい値(低い圧力を示す値)になってしまう。
【0104】
本実施の形態では、そうしたブースター負圧の変化に起因するマスター圧推定値PesPmの変化に合わせて、同マスター圧推定値PesPmをもとに判断される[条件ロ]の閾値(第2判定値β)が小さい値に変更される。これにより、ブレーキペダル17の踏み込み操作が短時間において繰り返し行われたとき、すなわちブースター負圧が小さくなっているときに、そうでないときと比較して、マスター圧推定値PesPmが小さい状況において内燃機関11の出力制限の実行が許可される。そのため、このとき車両10の減速度合いが小さくなってマスター圧推定値PesPmが小さくなるとはいえ、これに合わせて内燃機関11の出力制限についての実行条件(具体的には、[条件ロ])を変更することができ、内燃機関11の出力制限を的確に行うことができる。
【0105】
以下、本実施の形態のトルク制限処理について図7を参照しつつ説明する。
図7に示すように、本処理では、前記実加速度G、駆動トルク相当加速度Gdrv、転がり抵抗Gk、ピッチング補正値Gpに基づいて以下の関係式から、ブレーキ相当加速度Gbrkが算出される(ステップS112)。
【0106】
Gbrk=G−Gdrv−Gk+Gp
その後、積載量推定値PesWに基づいて積載補正係数Cweが算出される(ステップS114)。そして、ブレーキ相当加速度Gbrk、変換係数Cgp、積載補正係数Cweに基づいて以下の関係式から、マスター圧推定値PesPmが算出される(ステップS301)。
【0107】
PesPm=Gbrk×Cgp×Cwe
その後、上記第2判定値βを変更する変更条件が成立しているか否かが判断される(ステップS302)。ここでは、以下の[条件ニ]が満たされ、且つ[条件ホ]〜[条件ト]のいずれかが満たされることをもって変更条件が成立していると判断される。
[条件ニ]アクセル踏込量Othrが第1判定値α以上であり、且つ同アクセル踏込量Othrの単位時間あたりの変化量が所定値以下であること。
[条件ホ]上記[条件ニ]が満たされた状態が継続されている間にブレーキスイッチ35がオン操作された回数が所定回数(例えば三回)以上であること。
[条件ヘ]上記[条件ニ]が満たされた状態が継続されている間にブレーキスイッチ35が所定時間(例えば1秒)未満の間隔でオン操作されたこと。
[条件ト]上記[条件ニ]が満たされた状態で上記[条件ホ]および[条件ヘ]のいずれかが満たされた後の経過時間が所定時間未満であること。
【0108】
そして、上記変更条件が成立している場合には(ステップS302:YES)、ブレーキペダル17の高い頻度での踏み込み操作によってブースター負圧が小さい状態になっているとして、第2判定値βに所定値β1が定められる(ステップS303)。本実施の形態では、[条件ホ]や[条件へ]が満たされることをもって、ブレーキペダル17の踏み込み操作の実行頻度が第3判定値以上になったと判断される。なお、所定値β1としては、ブレーキペダル17とアクセルペダル22との同時操作による車両10の加速や発進を招く可能性があることを前記[条件ロ]を通じて的確に判断可能な値であって、ブースター負圧が小さくなった状況に適した値が実験やシミュレーションの結果をもとに予め求められてブレーキECU32に記憶されている。
【0109】
一方、上記変更条件が成立していない場合には(ステップS302:NO)、ブースター負圧が小さい状態になっている可能性は低いとして、第2判定値βに所定値β2が定められる(ステップS304)。なお、所定値β2としては、ブレーキペダル17とアクセルペダル22との同時操作による車両10の加速や発進を招く可能性があることを前記[条件ロ]を通じて的確に判断可能な値であって、ブースター負圧が小さくなっていない状況に適した値が実験やシミュレーションの結果をもとに予め求められてブレーキECU32に記憶されている。この所定値β2としては、上記所定値β1より大きい値が設定される。
【0110】
このように第2判定値βが設定された後、前記[条件イ]および[条件ロ]が共に満たされるか否かが判断される(ステップS116)。
そして、[条件イ]および[条件ロ]が共に満たされる場合には(ステップS116:YES)、両ペダル17,22の同時踏み込みに起因する車両10の加速や発進を招く可能性があるとして、出力制限フラグがオン操作される(ステップS117)。これにより、内燃機関11の出力トルクが制限されて、両ペダル17,22の同時踏み込みに起因する車両10の加速や発進が抑えられる。
【0111】
一方、[条件イ]および[条件ロ]の一方でも満たされない場合には(ステップS116:NO)、出力制限フラグがオフ操作される(ステップS118)。この場合には、内燃機関11の出力トルクが制限されない。
【0112】
このようにして、マスター圧推定値PesPmをもとに、出力制限フラグが操作された後、本処理は一旦終了される。
以上説明したように、本実施の形態によれば、先の(1)、(3)および(4)に記載の効果に加えて、以下の(5)に記載する効果が得られるようになる。
【0113】
(5)ブレーキスイッチ35により検出されるブレーキペダル17の踏み込み操作の実行頻度が判定値以上になったときに、前記[条件ロ]の第2判定値βを小さい値に変更するようにした。そのため、ブースター負圧の変化に起因するマスター圧推定値PesPmの変化に合わせて同マスター圧推定値PesPmをもとに判断される[条件ロ]の閾値(第2判定値β)を小さい値に変更することができ、内燃機関11の出力制限を的確に行うことができる。
【0114】
(その他の実施の形態)
なお、上記各実施の形態は、以下のように変更して実施してもよい。
・各実施の形態において、車両10の重量(具体的には、積載量推定値PesW)を算出する方法は、運動方程式を通じて算出する方法に限らず、任意の算出方法を採用することができる。そうした車両重量の算出に用いる算出パラメータとしては、例えば着座センサやシートベルトスイッチの信号に基づき把握される搭乗者数や、燃料残量センサによって検出される燃料タンク内の燃料残量、車高センサによって検出される車高などを採用することができる。これら算出パラメータを採用する場合には、搭乗者数が多いほど、燃料残量が多いほど、車高が低いほど、車両10の重量として重い値を算出するようにすればよい。
【0115】
・各実施の形態において、積載補正係数Cweを、マップ演算を通じて算出することに代えて、予め定められた関係式をもとに算出するようにしてもよい。
・各実施の形態において、積載量推定値PesWをマスター圧推定値PesPmの推定パラメータとして用いることに代えて、積載量推定値PesWに応じて[条件ロ]の第2判定値βを可変設定してもよい。こうした構成においては、積載量推定値PesWが大きいときほど、第2判定値βとして小さい値を設定すればよい。同構成によれば、同一の踏力でブレーキペダル17を操作した場合であっても車両重量が重いときほど車両10の減速度合いが小さくなってマスター圧推定値PesPmが小さい値になるとはいえ、そうしたマスター圧推定値PesPmの変化に合わせて第2判定値βを変更することができる。したがって、ブレーキペダル17とアクセルペダル22との同時操作による車両10の加速や発進を的確に抑えることができる。
【0116】
・各実施の形態において、積載量推定値PesWを算出する構成や、積載量推定値PesWをマスター圧推定値PesPmの推定パラメータとして用いる構成を省略することができる。
【0117】
・第1および第2の実施の形態において、圧力センサ37によって検出されるブースター負圧Pvに基づいて負圧補正係数Cvcを算出することに代えて、マスターシリンダー圧の指標値に基づいて負圧補正係数を算出するようにしてもよい。なお、マスターシリンダー圧の指標値としては、例えばブレーキスイッチ35により検出されるブレーキペダル17の踏み込み操作タイミングや、ブレーキペダル17の踏み込み操作の継続時間、ブレーキペダル17の踏み込みが解除された後の経過時間などを採用することができる。
【0118】
・第1および第2の実施の形態において、負圧補正係数Cvcを、マップ演算を通じて算出することに代えて、予め定められた関係式をもとに算出するようにしてもよい。
・第1および第2の実施の形態において、ブースター負圧Pvをマスター圧推定値PesPmの推定パラメータとして用いることに代えて、ブースター負圧Pvに応じて[条件ロ]の第2判定値βを可変設定してもよい。同構成においては、ブースター負圧Pvが小さいときほど、すなわちブレーキブースター18の定圧室23の圧力と大気圧との差圧が小さいときほど、第2判定値βとして小さい値を設定すればよい。同構成によれば、同一の踏力でブレーキペダル17を操作した場合であってもブースター負圧Pvが小さいときほど車両10の減速度合いが小さくなってマスター圧推定値PesPmが小さい値になるとはいえ、そうしたマスター圧推定値PesPmの変化に合わせて第2判定値βを変更することができる。したがって、ブレーキペダル17とアクセルペダル22との同時操作による車両10の加速や発進を的確に抑えることができる。
【0119】
・第1および第2の実施の形態において、圧力センサ37や、圧力センサ37によって検出されるブースター負圧Pvをマスター圧推定値PesPmの推定パラメータとして用いる構成を省略してもよい。
【0120】
・各実施の形態の車両制御装置は、前部の車輪14が内燃機関11の出力トルクの伝達されない従動輪として機能するとともに、後部の車輪14が同出力トルクの伝達される駆動輪として機能する、いわゆる後輪駆動車にも適用することができる。
【0121】
・第1および第3の実施の形態の車両制御装置は、例えば四輪駆動車などといった全ての車輪が駆動輪である車両にも適用することができる。
・各実施の形態において、車両10がスリップ状態であることを判定する方法は任意に変更することができる。車両10がスリップ状態であることを判定する条件としては、例えば「各車輪14の車輪速VSOの最大値と最小値との差が所定値以上であること」との条件や、「各車輪14の車輪速VSOの平均値といずれかの車輪14の車輪速VSOとの差が所定値以上であること」との条件を設定することができる。また速度センサ36により検出される車輪速VSOに基づきスリップ状態を判定する方法に限らず、自動変速機12のギア位置Pgearと推定車体速度Vrefとの関係をもとにスリップ状態を判定することなども可能である。
【0122】
・第2の実施の形態において、ブレーキペダル17およびアクセルペダル22の同時操作時に同ブレーキペダル17の踏み込み操作の実行頻度が高くなったことを判定可能な条件であれば、変更条件は任意に変更することができる。例えば前記[条件ニ]に代えて、「アクセル踏込量Othrが第1判定値α以上であること」との条件を設定することができる。また[条件ト]を省略したり、[条件ホ]および[条件ヘ]の一方を省略したりしてもよい。
【0123】
・第1および第3の実施の形態において、車両10がスリップ状態であるときに内燃機関11の出力制限の実行を禁止する処理(図4のステップS106の処理)を省略してもよい。
【0124】
・各実施の形態の車両制御装置は、加速度センサの検出軸と平坦路での車両停止時において路面に並行になる方向とが一致するように同加速度センサが取り付けられた車両であれば、二軸の検出軸を有する加速度センサが採用された車両にも適用することができる。
【0125】
・各実施の形態において、推定車体加速度ΔVrefを車輪速VSOに基づき算出することに代えて、車軸13の回転速度を検出するとともにその検出値に基づき推定車体加速度を算出するようにしてもよい。
【0126】
・各実施の形態において、機関トルクTengとして機関ECU31から受信した値を用いることに代えて、車両10の運転状態(具体的には、アクセル踏込量Othrや、機関回転速度、吸入空気量など)に基づいてブレーキECU32により機関トルクを算出して用いるようにしてもよい。
【0127】
・各実施の形態において、ピッチング補正値Gpを、マップ演算を通じて算出することに代えて、予め定められた関係式をもとに算出するようにしてもよい。
・各実施の形態において、車両10の姿勢角を検出する姿勢角センサや車高を検出する車高センサを設けるとともに同センサの検出信号に基づいて車両10の姿勢変化分を検出し、その検出値に基づいてピッチング補正値Gpを算出するようにしてもよい。
【0128】
・各実施の形態において、ピッチング補正値Gpを、車両停止時および車両走行時のいずれか一方においてのみ算出するようにしてもよい。
・各実施の形態において、ピッチング補正値Gpを算出する処理や、同ピッチング補正値Gpをマスター圧推定値PesPmの推定パラメータとして用いる構成を省略してもよい。この場合には、推定車体加速度ΔVrefを算出する処理を省略することもできる。
【0129】
・第2の実施の形態の構成と第3の実施の形態の構成とを組み合わせて実施することができる。
・各実施の形態では、内燃機関11の運転制御をアイドル運転時における制御態様に変更することによって、同内燃機関11の出力トルクを制限するようにした。これに代えて、内燃機関11の出力トルクに上限値を設定したり、内燃機関11の運転(具体的には、燃料噴射や点火動作)を停止したりしてもよい。また、内燃機関11の出力トルクを制限することに代えて、自動変速機12をニュートラル状態にするようにしてもよい。要は、内燃機関11から車両10の車軸13に伝達される駆動トルクを制限することにより、ブレーキペダル17およびアクセルペダル22の同時操作による車両10の加速や発進を抑えることができる。
【0130】
・各実施の形態において、推定車体速度Vrefを車輪速VSOに基づき算出することに代えて、車軸13の回転速度を推定車体速度として検出するようにしてもよい。
・各実施の形態において、マスター圧推定値PesPmを算出することに代えて、ブレーキペダル17の踏力そのものの推定値を算出するようにしてもよい。要は、ブレーキペダル17の踏力の指標値や同踏力そのものを推定するととともに、その推定値した値(ブレーキ踏力推定値)に基づいてブレーキペダル17およびアクセルペダル22の同時踏み込みを判定すればよい。
【符号の説明】
【0131】
10…車両、11…内燃機関、12…自動変速機、13…車軸、14…車輪、14A…駆動輪、14B…従動輪、15…吸気通路、16…スロットルバルブ、17…ブレーキペダル、18…ブレーキブースター、19…マスターシリンダー、20…ディスクブレーキ装置、21…ブレーキアクチュエーター、22…アクセルペダル、23…定圧室、24…変圧室、25…真空弁、26…大気弁、27…ピストン、31…機関ECU(出力算出手段)、32…ブレーキECU(踏力推定手段、トルク制限手段、変更手段、重量算出手段)、33…アクセルセンサ、34…加速度センサ、35…ブレーキスイッチ、36…速度センサ、37…圧力センサ。
【特許請求の範囲】
【請求項1】
駆動源としての内燃機関(11)と、車両加速度を検出する加速度センサ(34)と、アクセルペダル(22)の踏み込み操作量を検出するアクセルセンサ(33)とを備えた車両(10)に適用されて、
前記内燃機関(11)の出力トルクを算出する出力算出手段(31、S104)と、
前記加速度センサ(34)により検出した前記車両加速度および、前記出力算出手段(31、S104)により算出した前記出力トルクに基づいてブレーキペダル(17)の踏み込み操作力を推定する踏力推定手段(32、S107,S108,S112,S115)と、
前記アクセルセンサ(33)により検出される前記踏み込み操作量が第1判定値以上であり、且つ前記踏力推定手段(32、S107,S108,S112,S115)により推定される前記踏み込み操作力が第2判定値以上であるときに、前記内燃機関(11)から車軸(13)に伝達される駆動トルクを制限するトルク制限手段(32、S116,S117)と
を備える車両制御装置。
【請求項2】
請求項1に記載の車両制御装置において、
前記車両(10)は、前記内燃機関(11)の吸気負圧を利用して形成されたブースター負圧により前記ブレーキペダル(17)の踏み込み操作の助勢を行うブレーキブースター(18)を備えてなり、
前記踏力推定手段(32、S107,S108,S112,S113,S115)は、前記ブースター負圧を前記踏み込み操作力の推定パラメータとして用いる
ことを特徴とする車両制御装置。
【請求項3】
請求項1に記載の車両制御装置において、
前記車両(10)は、前記ブレーキペダル(17)の踏み込み操作の有無を検出するブレーキスイッチ(35)を備えてなり、
前記車両制御装置は、前記ブレーキスイッチ(35)により検出される前記ブレーキペダル(17)の踏み込み操作の実行頻度が第3判定値以上になったときに前記第2判定値を小さい値に変更する変更手段(32、S302,S303)を備える
ことを特徴とする車両制御装置。
【請求項4】
請求項1〜3のいずれか一項に記載の車両制御装置において、
前記踏力推定手段(32、S107,S108,S112,S114,S115)は、前記車両(10)の重量を前記踏み込み操作力の推定パラメータとして用いる
ことを特徴とする車両制御装置。
【請求項5】
請求項2に記載の車両制御装置において、
前記車両(10)は、前記ブースター負圧を検出する圧力センサ(37)を備えてなり、
前記踏力推定手段(32、S107,S108,S112,S113,S115)は、前記圧力センサ(37)によって検出されるブースター負圧を前記推定パラメータとして用いる
ことを特徴とする車両制御装置。
【請求項6】
請求項4に記載の車両制御装置において、
当該装置は、前記加速度センサ(34)により検出される前記車両加速度と前記出力算出手段(31、S104)によって算出される前記出力トルクとに基づいて前記車両(10)の重量を算出する重量算出手段(32)を備え、
前記踏力推定手段(32、S107,S108,S112,S114,S115)は、前記重量算出手段(32)によって算出される重量を前記推定パラメータとして用いる
ことを特徴とする車両制御装置。
【請求項7】
駆動源としての内燃機関(11)と車両加速度を検出する加速度センサ(34)とアクセルペダル(22)の踏み込み操作量を検出するアクセルセンサ(33)とを備えた車両(10)の制御方法であって、
前記内燃機関(11)の出力トルクを算出する出力算出工程(S104)と、
前記加速度センサ(34)により検出した前記加速度および、前記出力算出工程(S104)において算出した前記出力トルクに基づいてブレーキペダル(17)の踏み込み操作力を推定する踏力推定工程(S107,S108,S112,S115)と、
前記アクセルセンサ(33)により検出される前記踏み込み操作量が第1判定値以上であり、且つ前記踏力推定工程(S107,S108,S112,S115)において推定される前記踏み込み操作力が第2判定値以上であるときに、前記内燃機関(11)から車軸(13)に伝達される駆動トルクを制限するトルク制限工程(S116,S117)と
を含む車両制御方法。
【請求項1】
駆動源としての内燃機関(11)と、車両加速度を検出する加速度センサ(34)と、アクセルペダル(22)の踏み込み操作量を検出するアクセルセンサ(33)とを備えた車両(10)に適用されて、
前記内燃機関(11)の出力トルクを算出する出力算出手段(31、S104)と、
前記加速度センサ(34)により検出した前記車両加速度および、前記出力算出手段(31、S104)により算出した前記出力トルクに基づいてブレーキペダル(17)の踏み込み操作力を推定する踏力推定手段(32、S107,S108,S112,S115)と、
前記アクセルセンサ(33)により検出される前記踏み込み操作量が第1判定値以上であり、且つ前記踏力推定手段(32、S107,S108,S112,S115)により推定される前記踏み込み操作力が第2判定値以上であるときに、前記内燃機関(11)から車軸(13)に伝達される駆動トルクを制限するトルク制限手段(32、S116,S117)と
を備える車両制御装置。
【請求項2】
請求項1に記載の車両制御装置において、
前記車両(10)は、前記内燃機関(11)の吸気負圧を利用して形成されたブースター負圧により前記ブレーキペダル(17)の踏み込み操作の助勢を行うブレーキブースター(18)を備えてなり、
前記踏力推定手段(32、S107,S108,S112,S113,S115)は、前記ブースター負圧を前記踏み込み操作力の推定パラメータとして用いる
ことを特徴とする車両制御装置。
【請求項3】
請求項1に記載の車両制御装置において、
前記車両(10)は、前記ブレーキペダル(17)の踏み込み操作の有無を検出するブレーキスイッチ(35)を備えてなり、
前記車両制御装置は、前記ブレーキスイッチ(35)により検出される前記ブレーキペダル(17)の踏み込み操作の実行頻度が第3判定値以上になったときに前記第2判定値を小さい値に変更する変更手段(32、S302,S303)を備える
ことを特徴とする車両制御装置。
【請求項4】
請求項1〜3のいずれか一項に記載の車両制御装置において、
前記踏力推定手段(32、S107,S108,S112,S114,S115)は、前記車両(10)の重量を前記踏み込み操作力の推定パラメータとして用いる
ことを特徴とする車両制御装置。
【請求項5】
請求項2に記載の車両制御装置において、
前記車両(10)は、前記ブースター負圧を検出する圧力センサ(37)を備えてなり、
前記踏力推定手段(32、S107,S108,S112,S113,S115)は、前記圧力センサ(37)によって検出されるブースター負圧を前記推定パラメータとして用いる
ことを特徴とする車両制御装置。
【請求項6】
請求項4に記載の車両制御装置において、
当該装置は、前記加速度センサ(34)により検出される前記車両加速度と前記出力算出手段(31、S104)によって算出される前記出力トルクとに基づいて前記車両(10)の重量を算出する重量算出手段(32)を備え、
前記踏力推定手段(32、S107,S108,S112,S114,S115)は、前記重量算出手段(32)によって算出される重量を前記推定パラメータとして用いる
ことを特徴とする車両制御装置。
【請求項7】
駆動源としての内燃機関(11)と車両加速度を検出する加速度センサ(34)とアクセルペダル(22)の踏み込み操作量を検出するアクセルセンサ(33)とを備えた車両(10)の制御方法であって、
前記内燃機関(11)の出力トルクを算出する出力算出工程(S104)と、
前記加速度センサ(34)により検出した前記加速度および、前記出力算出工程(S104)において算出した前記出力トルクに基づいてブレーキペダル(17)の踏み込み操作力を推定する踏力推定工程(S107,S108,S112,S115)と、
前記アクセルセンサ(33)により検出される前記踏み込み操作量が第1判定値以上であり、且つ前記踏力推定工程(S107,S108,S112,S115)において推定される前記踏み込み操作力が第2判定値以上であるときに、前記内燃機関(11)から車軸(13)に伝達される駆動トルクを制限するトルク制限工程(S116,S117)と
を含む車両制御方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−97621(P2012−97621A)
【公開日】平成24年5月24日(2012.5.24)
【国際特許分類】
【出願番号】特願2010−244775(P2010−244775)
【出願日】平成22年10月29日(2010.10.29)
【出願人】(301065892)株式会社アドヴィックス (1,291)
【Fターム(参考)】
【公開日】平成24年5月24日(2012.5.24)
【国際特許分類】
【出願日】平成22年10月29日(2010.10.29)
【出願人】(301065892)株式会社アドヴィックス (1,291)
【Fターム(参考)】
[ Back to top ]