
車両制御装置
【課題】車両状態に応じた適切な車両制御を実現する。
【解決手段】ECUにおいて、路面状態判定部は、車両の走行路が通常路か砂地路かを判定する。スリップ率取得部は、車両が通常路を走行していると判定された場合に、目標スリップ率として第1スリップ率を設定し、車両が砂地路を走行していると判定された場合に、目標スリップ率として第3スリップ率を設定する。路面状態判定部は、オフロードスイッチがオンにされている場合であって、推定加速度Geおよび実加速度Gxが直線L1および直線L2の間の値となる場合、車両がプレ砂地路を走行していると判定する。スリップ率取得部は、車両がプレ砂地路を走行していると判定された場合、第1スリップ率と第3スリップ率の中間の値である第2スリップ率に目標スリップ率を設定する。
【解決手段】ECUにおいて、路面状態判定部は、車両の走行路が通常路か砂地路かを判定する。スリップ率取得部は、車両が通常路を走行していると判定された場合に、目標スリップ率として第1スリップ率を設定し、車両が砂地路を走行していると判定された場合に、目標スリップ率として第3スリップ率を設定する。路面状態判定部は、オフロードスイッチがオンにされている場合であって、推定加速度Geおよび実加速度Gxが直線L1および直線L2の間の値となる場合、車両がプレ砂地路を走行していると判定する。スリップ率取得部は、車両がプレ砂地路を走行していると判定された場合、第1スリップ率と第3スリップ率の中間の値である第2スリップ率に目標スリップ率を設定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両制御装置に関し、特に、車両の挙動を制御する車両制御装置に関する。
【背景技術】
【0002】
一般に、車両のアンチスキッド制御装置では、アンチスキッド制御中に高い減圧および増圧が繰り返される制御ハンチングのおそれが生じたときには、制動圧の増圧量を低減させて制動圧の増圧を抑制し、制御ハンチングを抑制している。しかし、車両が砂利路や砂地路のように走行抵抗の高い路面を走行する際に制御ハンチングを抑制すべく制動圧の増圧が抑制されると、車両の減速度が低下して車両の制動性能を悪化させるおそれがある。このため、例えば、車両が走行抵抗の高い路面を走行していると判定された場合に、制動圧の増圧の抑制量を低減する車両用アンチスキッド制御装置が提案されている(例えば、特許文献1参照)。この他、例えば、駆動輪速度と従動輪速度との速度差に基づいてスリップ制御を行う車両用スリップ防止装置において、駆動輪速度と従動輪速度との速度差の許容範囲を手動にて変更する手動スイッチを設ける技術が提案されている(例えば、特許文献2)。また、例えば、リニア前後加速度センサの出力に基づいて車両が砂利路を走行中かダート路を走行中かを判定し、砂利路を走行中と判定したときのブレーキ液圧制御と、ダート路を走行中と判定したときのブレーキ液圧制御とを、相互に異なる条件で、舗装路走行時のブレーキ液圧制御に比し増圧側にアクチュエータを調整するアンチスキッド制御装置が提案されている(例えば、特許文献3参照)。
【特許文献1】特開2005−138737号公報
【特許文献2】特開平6−341334号公報
【特許文献3】特開平11−180278号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
上述の特許文献1に記載されるように、走行抵抗の高い路面を走行しているか舗装された道路のような通常路を走行しているかを判定する技術が知られている。しかし、通常路を走行しているにもかかわらず走行抵抗の高い路面を走行していると誤判定されると、本来走行抵抗の高い路面を走行中に実施すべきABS制御(Antilock Brake System)などのアンチスキッド制御が通常路を走行中に実施されることになる。したがって、このような誤判定が生じることがあると、走行する機会が多い通常路において最適な制御の下で走行することができない場合が生じる可能性がある。このため、通常路を走行しているにもかかわらず走行抵抗の高い路面を走行していると誤判定されることのないよう、車両が走行している路面状態の判定のための閾値が設定されている場合がある。
【0004】
しかしながら、このような閾値が設定されている場合、逆に走行抵抗の高い路面を走行しているにもかかわらず通常路を走行していると判定されるおそれが生じる。このような誤判定が生じると、走行抵抗の大きい路面において最適な制御の下で走行することが困難となる。
【0005】
本発明はこうした課題に鑑みてなされたものであり、その目的は、車両状態に応じた適切な車両制御を実現することにある。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本発明のある態様の車両制御装置は、車両が第1状態および第2状態のどちらにあるかを判定する車両状態判定手段と、車両が第1状態にあると判定された場合に、第1状態に適応させるよう車両の挙動を制御する第1車両制御を実施し、車両が第2状態にあると判定された場合に、第2状態に適応させるよう車両の挙動を制御する第2車両制御を実施する車両制御手段と、を備える。車両状態判定手段は、車両が第2状態と同一または類似の状態となる可能性が高いことを示唆する示唆情報を取得した場合、通常は車両が第1状態にあると判定されるような場合であっても、所定の条件を満たしたときは、第1状態および第2状態の中間状態に車両があると判定し、車両制御手段は、車両が中間状態にあると判定された場合に、第1車両制御と第2車両制御の中間的な制御である中間的車両制御を実施する。
【0007】
近年、オフロードスイッチによる車両制御やカーナビゲーションシステムなどの開発が進められている。例えばオフロードスイッチがオンにされたときは、車両がオフロード走行をする可能性が高いことを示唆しているということができ、また、カーナビゲーションシステムによって砂地が多い地帯を車両が走行していることが検出された場合、車両が砂地路を走行する可能性が高いことを示唆しているということができる。この態様によれば、例えばこのような機器から出力される、車両が置かれた状態を示唆する示唆情報を利用して、第1車両制御と第2車両制御の中間的な制御を実施することが可能となる。このため、例えば、実際は車両が第2状態にあるにもかかわらず第1車両制御が実施されるように、車両の実際の状態と大きく異なる状態に適応させるよう車両の挙動が制御されることを回避することができ、安定した車両制御を実現することができる。
【0008】
車両状態判定手段は、車両が第1状態および第2状態のどちらにあるかの判定として、車両の走行路が第1路面状態か、第1路面状態よりも走行抵抗が大きい第2路面状態かを判定し、車両が第2路面状態または第2路面状態に類似する状態の路面を走行する可能性が高いことを示唆する示唆情報を取得した場合、通常は車両の走行路が第1路面状態と判定されるような場合であっても、所定の条件を満たしたときは、車両が第1路面状態および第2路面状態の中間状態にあると判定してもよい。
【0009】
この態様によれば、走行路が第2路面状態であるにもかかわらず第1車両制御が実施される機会を低減させることができる。このため、車両の走行路が第1路面状態および第2路面状態の中間状態にあるような場合においても、走行路の路面状態に適した車両制御を実現することができる。
【0010】
車両状態判定手段は、車両を走行させるための駆動源の出力に基づいて車両に発生していると推定される推定加速度を算出し、車両に実際に発生している実加速度を算出し、算出された推定加速度と算出された実加速度とを比較して、車両の走行路が第1路面状態か第2路面状態かを判定してもよい。
【0011】
この態様によれば、走行路の路面状態を適切に判定することができる。このため、車両が中間状態にあるか否かも適切に判定することができ、走行路の路面状態に適した車両制御をより確実に実現することができる。
【0012】
ユーザによりオンオフ操作される手動入力手段をさらに備えてもよい。車両状態判定手段は、手動入力手段がオンにされたことを示すオン信号を取得した場合、通常は第1状態と判定されるような場合であっても、所定の条件を満たしたときは、車両が中間状態にあると判定してもよい。
【0013】
近年、例えばオフロードスイッチやデフロックスイッチなど、ユーザによるオンオフ操作が可能なスイッチが車両客室内に設けられる場合がある。このようなスイッチがオンにされた場合、車両は通常路よりも走行抵抗の高い路面を走行する可能性が高いと考えられる。この態様によれば、このように手動入力手段がユーザによって操作されたかを利用して、例えば通常は第1状態と判定されるような場合であっても、実際は第2状態となる可能性が高いような中間的な状態であることを適切に判定することが可能となる。
【0014】
手動入力手段は、オフロード走行に適応した車両の挙動の制御を実施させるべくユーザによって操作されるオフロードスイッチであってもよい。
【0015】
オフロードスイッチは、オフロード走行時にオンにされるものであることから、逆にオフロードスイッチがオンにされる場合、車両がオフロード走行する可能性は高いと考えられる。この態様によれば、このようなオフロードスイッチがユーザによって操作されたかを利用して、例えば通常は第1状態と判定されるような場合であっても、実際は第2状態となる可能性が高いような中間的な状態であることを適切に判定することが可能となる。
【0016】
車両制御手段は、車両が第1状態にあると判定された場合に、目標スリップ率を第1スリップ率に設定して車両に与える制動力を制御する第1車両制御を実施し、車両が第2状態にあると判定された場合に、目標スリップ率を第2スリップ率に設定して車両に与える制動力を制御する第2車両制御を実施し、車両が中間状態にあると判定された場合に、目標スリップ率を、第1スリップ率と第2スリップ率の中間の値である第3スリップ率に設定して車両に与える制動力を制御する中間的車両制御を実施してもよい。
【0017】
この態様によれば、実際には車両が第2状態にあるにもかかわらず第1車両制御が実施される場合よりも、車両に与える制動力を適切に制御することができる。このため、第1状態および第2状態の中間状態に車両がある場合において、車両状態に応じた適切な車両制御を実現することが可能となる。
【発明の効果】
【0018】
本発明によれば、車両状態に応じた適切な車両制御を実現することができる。
【発明を実施するための最良の形態】
【0019】
以下、図面を参照して本発明の実施の形態(以下、「実施形態」という。)について詳細に説明する。
【0020】
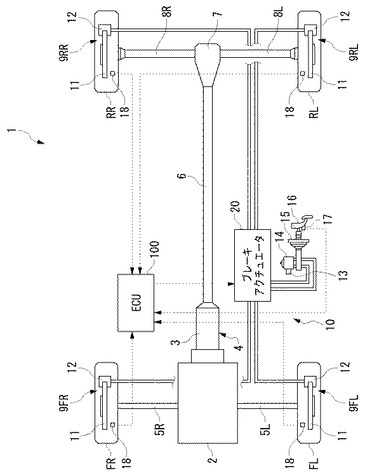
図1は、本発明による車両走行路判別装置が適用された車両を示す概略構成図である。同図に示される車両1は、車輪FL,FR,RLおよびRRを有する。ここでは、車輪FRは運転席からみて前方右側、車輪FLは前方左側、車輪RRは後方右側、車輪RLは後方左側の車輪をそれぞれ示す。また、車両1は、ガソリンエンジンまたはディーゼルエンジンである内燃機関2と、自動変速機または無段変速機である変速機3を含むトランスアクスル4と、図示されないトランスファとを有する。すなわち、本実施形態の車両1は、例えばRV車両やいわゆるピックアップトラックといったような4輪駆動車両として構成されており、前輪FL,FRには、トランスファ、図示されないフロントデファレンシャルおよびドライブシャフト5L,5Rを介して、内燃機関2から動力が伝達される。また、トランスアクスル4のアウトプットシャフト6は、リヤデファレンシャル7に接続されており、このリヤデファレンシャル7には、ドライブシャフト8L,8Rを介して後輪RLおよびRRが連結されている。なお、本実施形態の車両1は、いわゆるハイブリッド車両や電気自動車として構成され得ることはいうまでもない。
【0021】
また、車両1は、車輪FR〜RLごとに設けられたディスクブレーキユニット9FR,9FL,9RRおよび9RLを含む制動装置10を備えている。制動装置10は、いわゆるEBD(Electronic Brake force Distribution:電子制動力分配制御)付きアンチスキッド制御装置(ABS)として構成されている。各ディスクブレーキユニット9FR〜9RLは、それぞれブレーキディスク11およびブレーキキャリパ12を含み、各ブレーキキャリパ12は、ホイールシリンダ41,42,43または44を内蔵している。また、各ブレーキキャリパ12のホイールシリンダ41〜44は、それぞれ独立の液圧ラインを介してブレーキアクチュエータ20に接続されている。
【0022】
ブレーキアクチュエータ20は、マスタシリンダ14の2つの出力ポートに接続されており、マスタシリンダ14には、ブースタ15を介してブレーキペダル16が接続されている。そして、本実施形態では、各ブレーキキャリパ12に含まれるホイールシリンダ41〜44のブレーキ圧が、マスタシリンダ14から供給される液圧に拘らず独立して設定可能とされている。マスタシリンダ14にはマスタシリンダ圧センサ13が設けられており、マスタシリンダ圧センサ13は、マスタシリンダ14内のブレーキオイルの圧力を検出する。ブレーキペダル16には、ペダル踏み込み時にONされるブレーキランプスイッチ17が設けられている。更に、車輪FR〜RLには、それぞれの回転速度すなわち車輪速度に応じた信号を出力する車輪速センサ18が設けられている。
【0023】
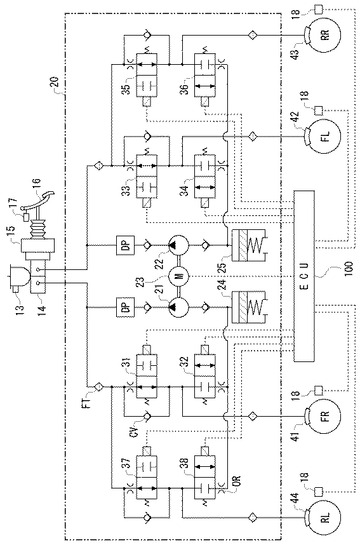
図2は、制動装置10に含まれるブレーキアクチュエータ20の系統図である。同図に示されるように、ブレーキアクチュエータ20における液圧回路は、右前輪FRおよび左後輪RL用の系統と、左前輪FLおよび右後輪RR用の系統とが独立したダイアゴナル系統として構成される。これにより、一方の系統に何らかの支障をきたしても、他方の系統の機能は確実に維持される。
【0024】
マスタシリンダ14の一方の出力ポートには、ノーマルオープンの電磁弁31および37が並列に接続されており、電磁弁31には液圧路を介して右前輪FR用のホイールシリンダ41が、電磁弁37には、液圧路を介して左後輪RL用のホイールシリンダ44が接続されている。そして、電磁弁31,37とマスタシリンダ14との間には、液圧ポンプ21の吐出口が接続されている。また、マスタシリンダ14の他方の出力ポートには、ノーマルオープンの電磁弁33および35が並列に接続されており、電磁弁33には液圧路を介して左前輪FL用のホイールシリンダ42が、電磁弁35には、液圧路を介して右後輪RR用のホイールシリンダ43が接続されている。そして、電磁弁33,35とマスタシリンダ14との間には、液圧ポンプ22の吐出口が接続されている。液圧ポンプ21および22は電動モータ23によって駆動されるものであり、これらの液圧ポンプ21および22が作動すると、ホイールシリンダ41〜44に対して所定の圧力に昇圧されたブレーキ液が供給される。
【0025】
ホイールシリンダ41には、更にノーマルクローズの電磁弁32が接続され、ホイールシリンダ44には、更にノーマルクローズの電磁弁38が接続されている。電磁弁32および38の下流側ポートはリザーバ24に接続されると共に、逆止弁CVを介して液圧ポンプ21の吸入口に接続されている。また、ホイールシリンダ42には、ノーマルクローズの電磁弁34が接続され、ホイールシリンダ43には、ノーマルクローズの電磁弁36が接続されている。電磁弁34および36の下流側ポートはリザーバ25に接続されると共に、逆止弁CVを介して液圧ポンプ22の吸入口に接続されている。各リザーバ24,25は、ピストンおよびスプリングを含み、電磁弁32〜38を介して流れ込むホイールシリンダ41〜44からのブレーキ液を収容する。
【0026】
電磁弁31〜38は、何れもソレノイドコイルを備えた2ポート2位置電磁切換弁である。電磁弁31〜38は、ソレノイドコイルの非通電時に図2に示される第1位置に設定され、これにより、ホイールシリンダ41〜44はマスタシリンダ14と連通する。また、電磁弁31〜38は、ソレノイドコイルの通電時に第2位置に設定され、これにより、ホイールシリンダ41〜44はマスタシリンダ14から遮断され、リザーバ24または25と連通する。なお、図2において、DPはダンパ、CVは逆止弁、ORはオリフィス、FTはフィルタを示す。逆止弁CVは、ホイールシリンダ41〜44およびリザーバ24,25からマスタシリンダ14へのブレーキ液の流通を許容する一方、それとは逆方向の流れを遮断する。
【0027】
そして、電磁弁31〜38のソレノイドコイルの通電状態を制御することにより、ホイールシリンダ41〜44のブレーキ液圧を増圧、減圧または保持することが可能となる。すなわち、電磁弁31〜38のソレノイドコイルの非通電時には、ホイールシリンダ41〜44にマスタシリンダ14および液圧ポンプ21または22からブレーキ液が供給され、これにより、ホイールシリンダ41〜44のブレーキ液圧が増圧される。また、電磁弁31〜38のソレノイドコイルの通電時には、ホイールシリンダ41〜44がリザーバ24または25と連通し、ホイールシリンダ41〜44のブレーキ液圧が減圧される。更に、電磁弁31,33,35および37のソレノイドコイルに通電する一方、その他の電磁弁32,34,36および38のソレノイドコイルを非通電とすれば、ホイールシリンダ41〜44のブレーキ液圧が保持される。そして、上記ソレノイドコイルに対する通電、非通電の時間間隔、すなわちデューティーを調整することにより、ホイールシリンダ41〜44のブレーキ液圧を緩やかに増圧(パルス増圧)させることも可能となる。
【0028】
このように構成されるブレーキアクチュエータ20は、図1および図2に示されるように、電子制御ユニット(以下、「ECU」という)100によって制御される。すなわち、ECU100は、車輪FR〜RLのスリップ率に基づいて各車輪FR〜RLに制動力を付与するためのブレーキ圧を増減させるアンチスキッド制御(以下「ABS制御」という)を実行する。ECU100は、図示されないCPU、ROM、RAM、入出力インターフェースおよび記憶装置等を含むものであり、ブレーキアクチュエータ20を構成する電磁弁31〜38のソレノイドコイルの通電状態を制御する。また、上述の液圧ポンプ21および22の電動モータ23もECU100により制御される。
【0029】
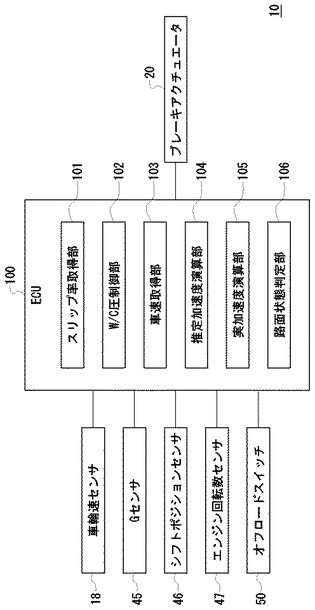
図3は、車両1に設けられている制動装置10の制御ブロック図である。なお、ECU100は、各種演算処理を実行するCPU、各種制御プログラムを格納するROM、データ格納やプログラム実行のためのワークエリアとして利用されるRAMを有し、図3においてECU100は、これらCPU、ROM、RAMなどのハードウェア、およびソフトウェアの連携によって実現される機能ブロックとして描かれている。したがって、これらの機能ブロックはハードウェアおよびソフトウェアの組合せによって様々な形で実現することができる。
【0030】
ECU100には、上述の各車輪FR〜RLの車輪速センサ18が接続されている。各車輪速センサ18は、対応する車輪FL〜RRの回転速度すなわち車輪速度と回転方向とを示す信号をECU100に出力する。
【0031】
これに加えて、ECU100には、Gセンサ45、シフトポジションセンサ46、エンジン回転数センサ47、およびオフロードスイッチ50が接続されている。Gセンサ45は、いわゆる2軸加速度センサであり、車両1の前後方向すなわち進行方向における加速度(加減速度)、および車両1の横方向すなわち幅方向における加速度を検出する。Gセンサ45は、車両の前後方向および横方向の加速度を示す信号をECU100に出力する。なお、2軸加速度センサであるGセンサ45に代わって、車両1の前後方向における加速度のみを検出するセンサ、および車両1の横方向における加速度のみを検出するセンサが用いられてもよい。
【0032】
シフトポジションセンサ46は、ドライバーにより設定された変速機3のシフトレンジを検知して、検知したレンジを示す信号をECU100に出力する。エンジン回転数センサ47は、内燃機関2の回転数を検知し、検知した値を示す信号をECU100に出力する。
【0033】
オフロードスイッチ50は、車両客室内の運転席近傍のインスツルメントパネルなどに配置される。オフロードスイッチ50はECU100に接続されており、運転者にオンオフ操作されたときに、オン信号またはオフ信号をECU100に出力する。
【0034】
ECU100は、オフロードスイッチ50が押された場合、オフロード走行に適したABS制御やトラクション制御を実施する。オフロードスイッチ50やオフロードスイッチ50がオンにされた場合のABS制御やトラクション制御は公知の技術であるため、その説明は省略する。
【0035】
また、車両1にはエンジンのスロットルバルブ(図示せず)の開度などを制御するエンジンECU(図示せず)、およびオートマティックトランスミッションのシフトチェンジタイミングなどを制御するトランスミッションECU(図示せず)が設けられている。エンジンECUは、オフロードスイッチ50がオンにされた場合、スロットルバルブを開くタイミングをオフロード走行に適したものに変更し、また、トランスミッションECUは、シフトチェンジタイミングをオフロード走行に適したものに変更する。オフロードスイッチ50がオンにされた場合のスロットルバルブのタイミング変更方法、およびシフトチェンジタイミングの変更方法も公知の技術であるため、説明を省略する。
【0036】
図3に示されるように、ECU100には、スリップ率取得部101、ホイールシリンダ圧制御部(以下「W/C圧制御部」という)102、車速取得部103、推定加速度演算部104、実加速度演算部105、および路面状態判定部106が構築されている。スリップ率取得部101は、ROMなどの記憶部に格納されたスリップ率を示すデータから適切なデータを選択することにより、車輪FR〜RLのスリップ率を取得する。W/C圧制御部102は、スリップ率取得部101により取得された車輪FR〜RLのスリップ率に応じてホイールシリンダ41〜44の目標ホイールシリンダ圧を決定する。また、ECU100は、駆動回路(図示せず)を介して電磁弁31〜38に接続されており、また、リレー(図示せず)を介して電動モータ23に接続されている。W/C圧制御部102は、駆動回路に制御電流を出力し、バッテリ(図示せず)から電磁弁31〜38の各々に供給する電流のデューティーを制御することにより、電磁弁31〜38を開弁または閉弁させ、ホイールシリンダ41〜44のホイールシリンダ圧を増圧または減圧させる。このように、スリップ率取得部101およびW/C圧制御部102は、車両に与える制動力を制御する制動制御部として機能する。
【0037】
車速取得部103は、各車輪速センサ18の検出値に基づいて車両1(車体)の速度としての車体速度Vs、および各車輪の回転加速度としての車輪加速度Dwを取得する。
【0038】
推定加速度演算部104は、まずエンジン回転数センサ47により検出される内燃機関2の回転数と、シフトポジションセンサ46からの信号に基づいて得られる変速機3のギヤ比とに基づいて、駆動輪である各車輪FR〜RLの推定車輪速度を所定のサンプリング時間おきに求める。推定加速度演算部104は、求めた推定車輪速度と当該サンプリング時間とに基づいて推定される車輪加速度を算出し、各車輪FR〜RLの推定される車輪加速度の平均値の推定車輪加速度を算出する。推定加速度演算部104は、この推定車輪加速度を利用して車両1の推定加速度Geを算出する。実加速度演算部105は、Gセンサ45からの信号に基づいて車両1の実際の加速度としての実加速度Gxを算出する。路面状態判定部106は、算出された推定加速度Geおよび実加速度Gxに基づいて、車両1が走行している路面(以下、「走行路」という)の状態を判定する。このようにECU100は、車両に与える制動力を制御する車両制御手段として機能する。
【0039】
車両1が砂地路を走行しているとき、通常路を走行しているときに比べ、同じエンジン出力を発生している場合でも円滑に加速することができず、実加速度Gxが推定加速度Geよりも大きく低下する。ECU100の路面状態判定部106はこれを利用して、推定加速度Geと実加速度Gxとを比較することにより、車両1の走行路が、「通常路」および「砂地路」のどちらかを判定する。なお、通常路とは、砂地路よりも走行抵抗が小さい舗装路や平坦路をいうものとする。
【0040】
路面状態判定部106は推定加速度Geおよび実加速度Gxに基づいて路面状態を判定しており、実際の路面状態を見て判定しているわけではないため、実際には通常路を走行しているにもかかわらず砂地路を走行していると判定される誤判定や、実際には砂地路を走行しているにもかかわらず通常路を走行していると判定される誤判定が生じる可能性がある。前者の誤判定が生じた場合には、実際には通常路を走行しているにもかかわらず砂地路走行に適したABS制御が実施されることになり、後者の誤判定が生じた場合には、実際には砂地路を走行しているにもかかわらず通常路走行に適したABS制御が実施されることになる。
【0041】
ここで、一般的には、砂地路など走行抵抗が高い路面を走行する機会よりも通常路を走行する機会が多いと考えられる。したがって、前者の誤判定が生じる方が、後者の誤判定が生じるよりも、誤った判定結果に基づいて実施されるABS制御によって車両の操作性などに与える影響が大きい。このため、一般には前者の誤判定、すなわち実際には通常路を走行しているにもかかわらず砂地路を走行していると判定される誤判定が生じる可能性が低くなるよう、通常路か砂地路かを判定するための閾値が設定されている。
【0042】
しかしながら、このように判定のための閾値が設定された場合、逆に後者の誤判定、すなわち実際には砂地路を走行しているにもかかわらず通常路を走行していると判定される誤判定が生じる可能性が大きくなるおそれがある。このような誤判定が生じると、砂地路を走行中の車両の操作性が低下するおそれが生じる。このため、車両1の走行路の路面状態に応じた適切なABS制御を実現することを可能とする技術の開発が現在強く求められている。
【0043】
このため、本実施形態に係る路面状態判定部106は、オフロードスイッチ50が運転者によりオンにされた場合、推定加速度Geおよび実加速度Gxの値が通常は車両1の走行路が通常路と判定されるような値となっている場合であっても、他の所定の条件を満たしたときは、車両1の走行路が、通常路および砂地路のどちらの路面も走行し得る路面であるプレ砂地路であると判定する。また、スリップ率取得部101およびW/C圧制御部102は、車両1がプレ砂地路を走行していると判定された場合に、車両1が通常路を走行していると判定された場合に実施するABS制御と、車両1が砂地路を走行していると判定された場合に実施するABS制御の中間的なABS制御を実施する。以下、図4〜図7に関連して、このような制御手順について詳細に説明する。
【0044】
図4は、路面状態判定部106による車両1の走行路の判定手順を示すフローチャートである。本フローチャートにおける処理は、ABS制御が実施されている間、所定時間毎に繰り返し実施される。なお、本フローチャートにおける処理は、イグニッションスイッチ(図示せず)がオンにされたとき開始され、イグニッションスイッチがオフにされるまで所定時間毎に繰り返し実施されてもよい。
【0045】
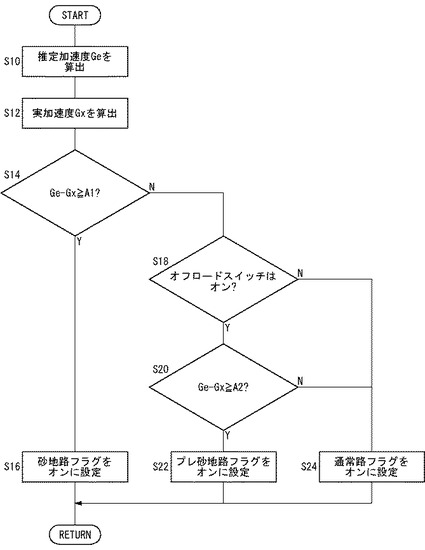
推定加速度演算部104は、まず推定加速度Geを算出し(S10)、実加速度演算部105は、実加速度Gxを算出する(S12)。推定加速度Geおよび実加速度Gxが算出されると、路面状態判定部106は、推定加速度Geから実加速度Gxを引いた値が第1閾値A1以上か否かを判定する(S14)。
【0046】
推定加速度Geから実加速度Gxを引いた値が第1閾値A1以上と判定された場合(S14のY)、路面状態判定部106は、車両1は砂地路を走行中と判定し、砂地路フラグをオンに設定する(S16)。
【0047】
ここで、オフロードスイッチ50は、車両がオフロード走行をする場合に運転者によりオンにされる。このため、運転者によりオフロードスイッチ50がオンにされたということは、車両1がすでに通常路よりも走行抵抗の大きいオフロードを走行しているか、まだ通常路を走行している場合であっても間もなくオフロードを走行することを示唆すると考えることができる。このため、推定加速度Geから実加速度Gxを引いた値が第1閾値A1より小さいと判定された場合(S14のN)、路面状態判定部106は、オフロードスイッチ50が運転者によりオンにされているか否かを判定する(S18)。
【0048】
オフロードスイッチ50がオンにされている場合(S18のY)、推定加速度Geから実加速度Gxを引いた値が通常路を走行していると判定されるような値であっても、車両1が砂地路を走行する可能性は高いと考えられる。このため、路面状態判定部106は、推定加速度Geから実加速度Gxを引いた値が第2閾値A2以上か否かを判定することにより、車両1の走行路がプレ砂地路か否かを判定する(S20)。なお、第2閾値A2は、第1閾値A1よりも小さい値とされている。推定加速度Geから実加速度Gxを引いた値が第2閾値A2以上の場合(S20のY)、路面状態判定部106は、車両1がプレ砂地路を走行中と判定し、プレ砂地路フラグをオンに設定する(S22)。
【0049】
オフロードスイッチ50がオフにされている場合(S18のN)は、車両1がプレ砂地路を走行する可能性は低いと考えられる。また、オフロードスイッチ50がオンにされている場合であっても、推定加速度Geから実加速度Gxを引いた値が第2閾値A2より小さい場合(S20のN)、車両1がすぐに通常路を走行する可能性は低いと考えられる。このため、路面状態判定部106は、これらの場合には車両1が通常路を走行していると判定し、通常路フラグをオンに設定する(S24)。
【0050】
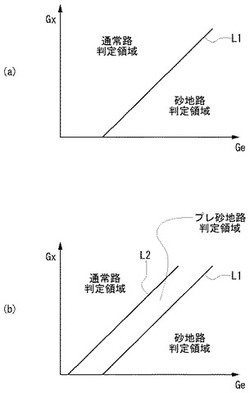
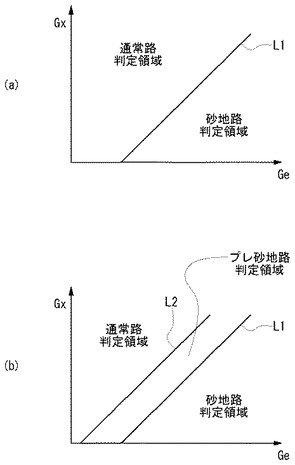
図5(a)に、オフロードスイッチ50がオフにされている場合の、通常路と判定される通常路判定領域と、砂地路と判定される砂地路判定領域との関係を示し、図5(b)に、オフロードスイッチ50がオンにされた場合の、通常路判定領域、砂地路判定領域、およびプレ砂地路判定領域の関係を示す。図5(a)および(b)において、横軸は推定加速度Ge、縦軸は実加速度Gxを表す。
【0051】
オフロードスイッチ50がオフになっている場合、推定加速度Ge−実加速度Gx=第1閾値A1の直線(以下、「直線L1」という)を境に、右下の領域が砂地路判定領域となり、左上の領域が通常路判定領域となる。オフロードスイッチ50がオンになった場合、直線L1を境に右下の領域では、オフロードスイッチ50がオフになっている場合と同様に砂地路判定領域となる。しかし、直線L1を境に左上の領域では、推定加速度Ge−実加速度Gx=第2閾値A2の直線を直線L2として、直線L1より左上の領域は通常路判定領域となり、直線L1と直線L2とに囲まれる領域がプレ砂地路判定領域となる。
【0052】
このように、路面状態判定部106は、オフロードスイッチ50がオフになっているときでは通常路判定領域となる領域のうち砂地路判定領域に近い領域を、オフロードスイッチ50がオンになっているときにはプレ砂地路判定領域とする。これによって、実際には砂地路を走行しているにもかかわらず通常路と判定される誤判定を効果的に減少させることが可能となる。
【0053】
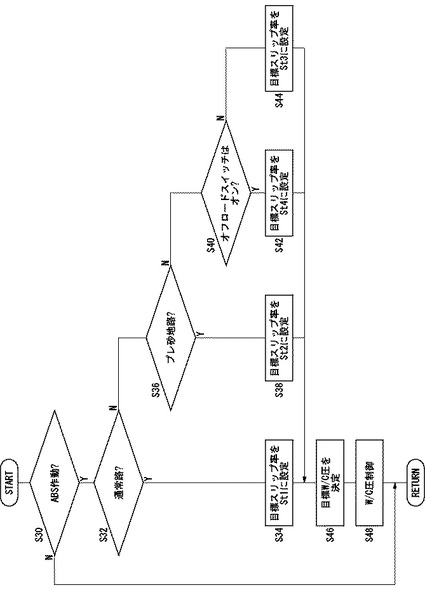
図6は、本実施形態に係るABS制御の制御手順を示すフローチャートである。イグニッションスイッチがオンにされたとき開始され、イグニッションスイッチがオフにされるまで所定時間毎に繰り返し実施される。
【0054】
スリップ率取得部101は、例えばABS制御中か否かを示すABSフラグがオンに設定されているか否かを判定することによりABS制御中か否かを判定し(S30)、ABS制御中でない場合(S30のN)、本フローチャートにおける処理を一旦終了する。なお、以下において説明する第1スリップ率St1〜第4スリップ率St4を示すデータはROMなどの記憶部に予め格納されている。
【0055】
ABS制御中の場合(S30のY)、スリップ率取得部101は、まず通常路フラグがオンに設定されているか否かを判定することにより、車両1が通常路を走行しているか否かを判定する(S32)。車両1が通常路を走行していると判定された場合(S32のY)、スリップ率取得部101は、目標スリップ率を一番低い値である第1スリップ率St1に設定する(S34)。
【0056】
車両1が通常路を走行していないと判定された場合(S32のN)、スリップ率取得部101は、プレ砂地路フラグがオンに設定されているか否かを判定することにより、車両1がプレ砂地路を走行しているか否かを判定する(S36)。車両1がプレ砂地路を走行していると判定された場合(S36のY)、スリップ率取得部101は、目標スリップ率を、上述の第1スリップ率St1と、同じくオフロードスイッチ50がオフとなっている場合に車両1が砂地路を走行していると判定された場合に設定される第3スリップ率St3との中間の値である第2スリップ率St2に設定する(S38)。
【0057】
目標スリップ率をこのような値に設定することにより、誤判定によって第1スリップ率St1が設定されるべき場合に第3スリップ率St3が設定されたり、第3スリップ率St3が設定されるべき場合に第1スリップ率St1が設定されるなど、本来設定されるべきスリップ率と大きく異なる値に目標スリップ率が設定されることを回避することができる。これによって、実際の路面状況に適さないABS制御が実施されることを抑制することができる。
【0058】
車両1がプレ砂地路を走行していないと判定された場合(S36のN)、スリップ率取得部101は、車両1は砂地路を走行していると判定し、次にオフロードスイッチ50がオンにされているか否かを判定する(S40)。スリップ率取得部101は、オフロードスイッチ50がオフにされている場合(S40のN)、目標スリップ率を第3スリップ率St3に設定し(S44)、オフロードスイッチ50がオンにされている場合(S40のY)、目標スリップ率を第3スリップ率St3よりも大きな値である第4スリップ率St4に設定する(S42)。
【0059】
目標スリップ率が設定されると、W/C圧制御部102は、設定された目標スリップ率に基づいてホイールシリンダ41〜44の各々の目標ホイールシリンダ圧を決定する(S46)。なお、目標ホイールシリンダ圧の決定方法は公知の技術であるため説明を省略する。目標ホイールシリンダ圧を決定すると、W/C圧制御部102は、決定した目標ホイールシリンダ圧を達成するようホイールシリンダ41〜44の各々のホイールシリンダ圧を制御する(S48)。
【0060】
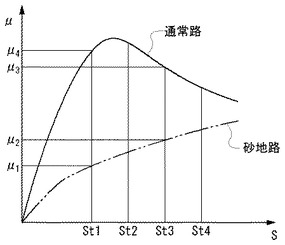
図7は、本実施形態に係る制動装置10のS−μ特性と第1スリップ率St1〜第4スリップ率St4との関係を示す図である。図7では、横軸にスリップ率S、縦軸に路面との摩擦係数μが表されている。図7に示すように、通常路のS−μ特性は、スリップ率Sが大きくなるにしたがって、路面との摩擦係数μが当初急激に上昇し、その後緩やかに低下する。これに対して、砂地路のS−μ特性は、スリップ率Sが大きくなるにしたがって緩やかに上昇していく。
【0061】
このため、通常は、車両1が通常路を走行していると判定された場合は、通常路のS−μ特性において路面との摩擦係数μが高い値となるよう第1スリップ率St1を低い値に設定し、車両1が砂地路を走行していると判定された場合は、砂地路のS−μ特性において路面との摩擦係数μが高い値となるよう、第3スリップ率St3を第1スリップ率St1よりも高い値に設定する。こうすることにより、路面との摩擦係数μを常に高い値に維持し、良好なABS制御の実現することが可能となる。
【0062】
しかし、例えば実際は車両1が通常路を走行しているにもかかわらず砂地路を走行していると誤判定された場合、目標スリップ率が、第1スリップ率St1に本来設定すべきところ第3スリップ率St3に設定されることになる。このため、路面との摩擦係数μはμ4からμ3に低下し、本来実現すべき良好なABS制御の実現が困難なものとなる。
【0063】
また、実際が車両1が砂地路を走行しているにもかかわらず通常路を走行していると誤判定された場合、目標スリップ率が、第3スリップ率St3に本来設定すべきところ第1スリップ率St1に設定されることになる。このため、路面との摩擦係数μはμ2からμ1に低下し、この場合も本来実現すべき良好なABS制御の実現が困難なものとなる。
【0064】
本実施形態のように、車両1がプレ砂地路を走行していると判定された場合に目標スリップ率を第2スリップ率St2に設定することにより、このような路面との摩擦係数μの大きな変動を抑制することが可能となる。これによって、路面状態が誤判定された場合においても、本来実施すべきABS制御と大きく異なるABS制御が実施されることを回避することができる。
【0065】
また、オフロードスイッチ50がオンにされている場合は、車両1が実際は通常路を走行しているにもかかわらず砂地路を走行していると判定される可能性は低いと考えられる。このため、本実施形態では、オフロードスイッチ50がオンにされた状態で車両1が砂地路を走行していると判定された場合、目標スリップ率を第3スリップ率St3よりも大きい値である第4スリップ率St4に設定する。このように、オフロードスイッチ50がオンにされた状態で車両1が砂地路を走行していると判定された場合、オフロードスイッチ50がオフにされている場合よりも目標スリップ率を大きな値とすることにより、路面との摩擦係数μをさらに大きな値とし、さらに良好なABS制御を実施することを可能としている。
【0066】
本発明は上述の実施形態に限定されるものではなく、また、当業者の知識に基づいて各種の設計変更等の変形を実施形態に対して加えることも可能であり、そのような変形が加えられた実施形態も本発明の範囲に含まれうる。以下、そうした例をあげる。
【0067】
ある変形例では、車両1の客室内における運転席周辺のインスツルメントパネルに、デフロックスイッチ(図示せず)が設けられる。デフロックスイッチがオンにされた場合、ディファレンシャルがロックされ、左右輪の作動が規制された状態となる。これによって、例えば片輪がぬかるみなどにはまった場合に車両1の脱出が可能となる。デフロックスイッチ、およびデフロックスイッチがオンにされた場合のこのような車両制御は公知の技術であるため説明を省略する。路面状態判定部106は、デフロックスイッチが運転者によりオンにされた場合、デフロックスイッチがオフにされている場合に車両1の走行路が通常路と判定されるような場合であっても、他の所定の条件を満たしたときは、車両1の走行路がプレ砂地路であると判定する。この場合の所定の条件とは、上述の実施形態のように、推定加速度Geおよび実加速度Gxが図5(b)における直線L1と直線L2の間の値となることであってもよい。
【0068】
このようなデフロックスイッチは、オフロードスイッチ50と同様、車両1がオフロードなど走行抵抗の大きい路面を走行するときに運転者によりオンにされる。このため、デフロックスイッチがオンにされた場合は、推定加速度Geおよび実加速度Gxからは車両1が通常路を走行していると判定されるような場合であっても、実際は車両1がオフロードなど走行抵抗の大きい路面を走行している、または直後にそのような路面を走行する可能性が高いことを示唆しているということができる。このため、デフロックスイッチがオンにされた場合であって、所定の条件を満たす場合にプレ砂地路であると判定することにより、路面状態の誤判定によるABSへの影響を抑制することができる。
【0069】
ある別の変形例では、車両1にはカーナビゲーションシステムが搭載されている。このカーナビゲーションシステムは、CPU、ROM、およびRAMを有する電子制御部を備え、この電子制御部は、GPS(Global Positioning System)により車両1の位置情報を取得すると共に、取得した車両1の位置情報を利用して、DVDまたはハードディスクなどの記憶部に格納された地図情報の中から車両1周辺の地図情報を取得する。カーナビゲーションシステムは公知の技術であるため、その構成に関するこれ以上の詳細な説明は省略する。
【0070】
ECU100は、カーナビゲーションシステムの電子制御部が取得した車両1の位置情報、および車両1周辺の地図情報を取得する。路面状態判定部106は、取得した車両1の位置情報および地図情報を利用して、車両1が砂地路や砂利路、またはダートなどの走行抵抗が高い路面を走行しているか否かを判定する。車両1がこのような走行抵抗の高い路面を走行していると判定した場合、路面状態判定部106は、通常は車両1の走行路が通常路と判定されるような場合であっても、他の所定の条件を満たしたときは、車両1の走行路がプレ砂地路であると判定する。なお、この場合の所定の条件も、上述の実施形態のように、推定加速度Geおよび実加速度Gxが図5(b)における直線L1と直線L2の間の値となることであってもよい。
【0071】
このように、カーナビゲーションシステムによって車両1が走行抵抗の高い路面を走行していることが検出された場合、推定加速度Geおよび実加速度Gxからは車両1が通常路を走行していると判定されるような場合であっても、車両1がオフロードなど走行抵抗の大きい路面を走行している、または直後にそのような路面を走行する可能性が高いことを示唆しているということができる。このため、カーナビゲーションシステムによって車両1が走行抵抗の高い路面を走行していることが検出された場合においても、所定の条件を満たす場合にプレ砂地路であると判定することにより、路面状態の誤判定によるABSへの影響を抑制することができる。
【0072】
また、ある別の変形例では、エンジンECUも路面状態判定部を有し、ECU100の路面状態判定部106と同様に、車両1の走行路が通常路か、砂地路か、またはプレ砂地路かを判定する。車両1がプレ砂地路を走行していると判定された場合、エンジンECUは、車両1が通常路を走行していると判定された場合のスロットルバルブを開くタイミングと、車両1が砂地路を走行していると判定された場合のスロットルバルブを開くタイミングとの中間のタイミングでスロットルバルブを開放させる。これによって、車両1の走行路が誤判定された場合においても、スロットルバルブが車両1が走行する路面状態に適したタイミングから大きく外れたタイミングで開放させることを回避することができる。
【0073】
また、ある別の変形例では、トランスミッションECUも路面状態判定部を有し、ECU100の路面状態判定部106と同様に、車両1の走行路が通常路か、砂地路か、またはプレ砂地路かを判定する。車両1がプレ砂地路を走行していると判定された場合、トランスミッションECUは、車両1が通常路を走行していると判定された場合のシフトチェンジタイミングと、車両1が砂地路を走行していると判定された場合のシフトチェンジタイミングとの中間のタイミングでシフトチェンジを行う。これによって、車両1の走行路が誤判定された場合においても、シフトチェンジが車両1が走行する路面状態に適したタイミングから大きく外れたタイミングで行われることを回避することができる。
【図面の簡単な説明】
【0074】
【図1】本発明による車両走行路判別装置が適用された車両を示す概略構成図である。
【図2】制動装置に含まれるブレーキアクチュエータの系統図である。
【図3】車両に設けられている制動装置の制御ブロック図である。
【図4】路面状態判定部による車両の走行路の判定手順を示すフローチャートである。
【図5】(a)は、オフロードスイッチがオフにされている場合の、通常路と判定される通常路判定領域と、砂地路と判定される砂地路判定領域との関係を示す図であり、(b)は、オフロードスイッチがオンにされた場合の、通常路判定領域、砂地路判定領域、およびプレ砂地路判定領域の関係を示す図である。
【図6】本実施形態に係るABS制御の制御手順を示すフローチャートである。
【図7】本実施形態に係る制動装置のS−μ特性と第1スリップ率St1〜第4スリップ率St4との関係を示す図である。
【符号の説明】
【0075】
1 車両、 2 内燃機関、 13 マスタシリンダ圧センサ、 17 ブレーキランプスイッチ、 18 車輪速センサ、 20 ブレーキアクチュエータ、 45 Gセンサ、 47 エンジン回転数センサ、 100 ECU、 101 スリップ率取得部、 102 W/C圧制御部、 103 車速取得部、 104 推定加速度演算部、 105 実加速度演算部、 106 路面状態判定部。
【技術分野】
【0001】
本発明は、車両制御装置に関し、特に、車両の挙動を制御する車両制御装置に関する。
【背景技術】
【0002】
一般に、車両のアンチスキッド制御装置では、アンチスキッド制御中に高い減圧および増圧が繰り返される制御ハンチングのおそれが生じたときには、制動圧の増圧量を低減させて制動圧の増圧を抑制し、制御ハンチングを抑制している。しかし、車両が砂利路や砂地路のように走行抵抗の高い路面を走行する際に制御ハンチングを抑制すべく制動圧の増圧が抑制されると、車両の減速度が低下して車両の制動性能を悪化させるおそれがある。このため、例えば、車両が走行抵抗の高い路面を走行していると判定された場合に、制動圧の増圧の抑制量を低減する車両用アンチスキッド制御装置が提案されている(例えば、特許文献1参照)。この他、例えば、駆動輪速度と従動輪速度との速度差に基づいてスリップ制御を行う車両用スリップ防止装置において、駆動輪速度と従動輪速度との速度差の許容範囲を手動にて変更する手動スイッチを設ける技術が提案されている(例えば、特許文献2)。また、例えば、リニア前後加速度センサの出力に基づいて車両が砂利路を走行中かダート路を走行中かを判定し、砂利路を走行中と判定したときのブレーキ液圧制御と、ダート路を走行中と判定したときのブレーキ液圧制御とを、相互に異なる条件で、舗装路走行時のブレーキ液圧制御に比し増圧側にアクチュエータを調整するアンチスキッド制御装置が提案されている(例えば、特許文献3参照)。
【特許文献1】特開2005−138737号公報
【特許文献2】特開平6−341334号公報
【特許文献3】特開平11−180278号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
上述の特許文献1に記載されるように、走行抵抗の高い路面を走行しているか舗装された道路のような通常路を走行しているかを判定する技術が知られている。しかし、通常路を走行しているにもかかわらず走行抵抗の高い路面を走行していると誤判定されると、本来走行抵抗の高い路面を走行中に実施すべきABS制御(Antilock Brake System)などのアンチスキッド制御が通常路を走行中に実施されることになる。したがって、このような誤判定が生じることがあると、走行する機会が多い通常路において最適な制御の下で走行することができない場合が生じる可能性がある。このため、通常路を走行しているにもかかわらず走行抵抗の高い路面を走行していると誤判定されることのないよう、車両が走行している路面状態の判定のための閾値が設定されている場合がある。
【0004】
しかしながら、このような閾値が設定されている場合、逆に走行抵抗の高い路面を走行しているにもかかわらず通常路を走行していると判定されるおそれが生じる。このような誤判定が生じると、走行抵抗の大きい路面において最適な制御の下で走行することが困難となる。
【0005】
本発明はこうした課題に鑑みてなされたものであり、その目的は、車両状態に応じた適切な車両制御を実現することにある。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本発明のある態様の車両制御装置は、車両が第1状態および第2状態のどちらにあるかを判定する車両状態判定手段と、車両が第1状態にあると判定された場合に、第1状態に適応させるよう車両の挙動を制御する第1車両制御を実施し、車両が第2状態にあると判定された場合に、第2状態に適応させるよう車両の挙動を制御する第2車両制御を実施する車両制御手段と、を備える。車両状態判定手段は、車両が第2状態と同一または類似の状態となる可能性が高いことを示唆する示唆情報を取得した場合、通常は車両が第1状態にあると判定されるような場合であっても、所定の条件を満たしたときは、第1状態および第2状態の中間状態に車両があると判定し、車両制御手段は、車両が中間状態にあると判定された場合に、第1車両制御と第2車両制御の中間的な制御である中間的車両制御を実施する。
【0007】
近年、オフロードスイッチによる車両制御やカーナビゲーションシステムなどの開発が進められている。例えばオフロードスイッチがオンにされたときは、車両がオフロード走行をする可能性が高いことを示唆しているということができ、また、カーナビゲーションシステムによって砂地が多い地帯を車両が走行していることが検出された場合、車両が砂地路を走行する可能性が高いことを示唆しているということができる。この態様によれば、例えばこのような機器から出力される、車両が置かれた状態を示唆する示唆情報を利用して、第1車両制御と第2車両制御の中間的な制御を実施することが可能となる。このため、例えば、実際は車両が第2状態にあるにもかかわらず第1車両制御が実施されるように、車両の実際の状態と大きく異なる状態に適応させるよう車両の挙動が制御されることを回避することができ、安定した車両制御を実現することができる。
【0008】
車両状態判定手段は、車両が第1状態および第2状態のどちらにあるかの判定として、車両の走行路が第1路面状態か、第1路面状態よりも走行抵抗が大きい第2路面状態かを判定し、車両が第2路面状態または第2路面状態に類似する状態の路面を走行する可能性が高いことを示唆する示唆情報を取得した場合、通常は車両の走行路が第1路面状態と判定されるような場合であっても、所定の条件を満たしたときは、車両が第1路面状態および第2路面状態の中間状態にあると判定してもよい。
【0009】
この態様によれば、走行路が第2路面状態であるにもかかわらず第1車両制御が実施される機会を低減させることができる。このため、車両の走行路が第1路面状態および第2路面状態の中間状態にあるような場合においても、走行路の路面状態に適した車両制御を実現することができる。
【0010】
車両状態判定手段は、車両を走行させるための駆動源の出力に基づいて車両に発生していると推定される推定加速度を算出し、車両に実際に発生している実加速度を算出し、算出された推定加速度と算出された実加速度とを比較して、車両の走行路が第1路面状態か第2路面状態かを判定してもよい。
【0011】
この態様によれば、走行路の路面状態を適切に判定することができる。このため、車両が中間状態にあるか否かも適切に判定することができ、走行路の路面状態に適した車両制御をより確実に実現することができる。
【0012】
ユーザによりオンオフ操作される手動入力手段をさらに備えてもよい。車両状態判定手段は、手動入力手段がオンにされたことを示すオン信号を取得した場合、通常は第1状態と判定されるような場合であっても、所定の条件を満たしたときは、車両が中間状態にあると判定してもよい。
【0013】
近年、例えばオフロードスイッチやデフロックスイッチなど、ユーザによるオンオフ操作が可能なスイッチが車両客室内に設けられる場合がある。このようなスイッチがオンにされた場合、車両は通常路よりも走行抵抗の高い路面を走行する可能性が高いと考えられる。この態様によれば、このように手動入力手段がユーザによって操作されたかを利用して、例えば通常は第1状態と判定されるような場合であっても、実際は第2状態となる可能性が高いような中間的な状態であることを適切に判定することが可能となる。
【0014】
手動入力手段は、オフロード走行に適応した車両の挙動の制御を実施させるべくユーザによって操作されるオフロードスイッチであってもよい。
【0015】
オフロードスイッチは、オフロード走行時にオンにされるものであることから、逆にオフロードスイッチがオンにされる場合、車両がオフロード走行する可能性は高いと考えられる。この態様によれば、このようなオフロードスイッチがユーザによって操作されたかを利用して、例えば通常は第1状態と判定されるような場合であっても、実際は第2状態となる可能性が高いような中間的な状態であることを適切に判定することが可能となる。
【0016】
車両制御手段は、車両が第1状態にあると判定された場合に、目標スリップ率を第1スリップ率に設定して車両に与える制動力を制御する第1車両制御を実施し、車両が第2状態にあると判定された場合に、目標スリップ率を第2スリップ率に設定して車両に与える制動力を制御する第2車両制御を実施し、車両が中間状態にあると判定された場合に、目標スリップ率を、第1スリップ率と第2スリップ率の中間の値である第3スリップ率に設定して車両に与える制動力を制御する中間的車両制御を実施してもよい。
【0017】
この態様によれば、実際には車両が第2状態にあるにもかかわらず第1車両制御が実施される場合よりも、車両に与える制動力を適切に制御することができる。このため、第1状態および第2状態の中間状態に車両がある場合において、車両状態に応じた適切な車両制御を実現することが可能となる。
【発明の効果】
【0018】
本発明によれば、車両状態に応じた適切な車両制御を実現することができる。
【発明を実施するための最良の形態】
【0019】
以下、図面を参照して本発明の実施の形態(以下、「実施形態」という。)について詳細に説明する。
【0020】
図1は、本発明による車両走行路判別装置が適用された車両を示す概略構成図である。同図に示される車両1は、車輪FL,FR,RLおよびRRを有する。ここでは、車輪FRは運転席からみて前方右側、車輪FLは前方左側、車輪RRは後方右側、車輪RLは後方左側の車輪をそれぞれ示す。また、車両1は、ガソリンエンジンまたはディーゼルエンジンである内燃機関2と、自動変速機または無段変速機である変速機3を含むトランスアクスル4と、図示されないトランスファとを有する。すなわち、本実施形態の車両1は、例えばRV車両やいわゆるピックアップトラックといったような4輪駆動車両として構成されており、前輪FL,FRには、トランスファ、図示されないフロントデファレンシャルおよびドライブシャフト5L,5Rを介して、内燃機関2から動力が伝達される。また、トランスアクスル4のアウトプットシャフト6は、リヤデファレンシャル7に接続されており、このリヤデファレンシャル7には、ドライブシャフト8L,8Rを介して後輪RLおよびRRが連結されている。なお、本実施形態の車両1は、いわゆるハイブリッド車両や電気自動車として構成され得ることはいうまでもない。
【0021】
また、車両1は、車輪FR〜RLごとに設けられたディスクブレーキユニット9FR,9FL,9RRおよび9RLを含む制動装置10を備えている。制動装置10は、いわゆるEBD(Electronic Brake force Distribution:電子制動力分配制御)付きアンチスキッド制御装置(ABS)として構成されている。各ディスクブレーキユニット9FR〜9RLは、それぞれブレーキディスク11およびブレーキキャリパ12を含み、各ブレーキキャリパ12は、ホイールシリンダ41,42,43または44を内蔵している。また、各ブレーキキャリパ12のホイールシリンダ41〜44は、それぞれ独立の液圧ラインを介してブレーキアクチュエータ20に接続されている。
【0022】
ブレーキアクチュエータ20は、マスタシリンダ14の2つの出力ポートに接続されており、マスタシリンダ14には、ブースタ15を介してブレーキペダル16が接続されている。そして、本実施形態では、各ブレーキキャリパ12に含まれるホイールシリンダ41〜44のブレーキ圧が、マスタシリンダ14から供給される液圧に拘らず独立して設定可能とされている。マスタシリンダ14にはマスタシリンダ圧センサ13が設けられており、マスタシリンダ圧センサ13は、マスタシリンダ14内のブレーキオイルの圧力を検出する。ブレーキペダル16には、ペダル踏み込み時にONされるブレーキランプスイッチ17が設けられている。更に、車輪FR〜RLには、それぞれの回転速度すなわち車輪速度に応じた信号を出力する車輪速センサ18が設けられている。
【0023】
図2は、制動装置10に含まれるブレーキアクチュエータ20の系統図である。同図に示されるように、ブレーキアクチュエータ20における液圧回路は、右前輪FRおよび左後輪RL用の系統と、左前輪FLおよび右後輪RR用の系統とが独立したダイアゴナル系統として構成される。これにより、一方の系統に何らかの支障をきたしても、他方の系統の機能は確実に維持される。
【0024】
マスタシリンダ14の一方の出力ポートには、ノーマルオープンの電磁弁31および37が並列に接続されており、電磁弁31には液圧路を介して右前輪FR用のホイールシリンダ41が、電磁弁37には、液圧路を介して左後輪RL用のホイールシリンダ44が接続されている。そして、電磁弁31,37とマスタシリンダ14との間には、液圧ポンプ21の吐出口が接続されている。また、マスタシリンダ14の他方の出力ポートには、ノーマルオープンの電磁弁33および35が並列に接続されており、電磁弁33には液圧路を介して左前輪FL用のホイールシリンダ42が、電磁弁35には、液圧路を介して右後輪RR用のホイールシリンダ43が接続されている。そして、電磁弁33,35とマスタシリンダ14との間には、液圧ポンプ22の吐出口が接続されている。液圧ポンプ21および22は電動モータ23によって駆動されるものであり、これらの液圧ポンプ21および22が作動すると、ホイールシリンダ41〜44に対して所定の圧力に昇圧されたブレーキ液が供給される。
【0025】
ホイールシリンダ41には、更にノーマルクローズの電磁弁32が接続され、ホイールシリンダ44には、更にノーマルクローズの電磁弁38が接続されている。電磁弁32および38の下流側ポートはリザーバ24に接続されると共に、逆止弁CVを介して液圧ポンプ21の吸入口に接続されている。また、ホイールシリンダ42には、ノーマルクローズの電磁弁34が接続され、ホイールシリンダ43には、ノーマルクローズの電磁弁36が接続されている。電磁弁34および36の下流側ポートはリザーバ25に接続されると共に、逆止弁CVを介して液圧ポンプ22の吸入口に接続されている。各リザーバ24,25は、ピストンおよびスプリングを含み、電磁弁32〜38を介して流れ込むホイールシリンダ41〜44からのブレーキ液を収容する。
【0026】
電磁弁31〜38は、何れもソレノイドコイルを備えた2ポート2位置電磁切換弁である。電磁弁31〜38は、ソレノイドコイルの非通電時に図2に示される第1位置に設定され、これにより、ホイールシリンダ41〜44はマスタシリンダ14と連通する。また、電磁弁31〜38は、ソレノイドコイルの通電時に第2位置に設定され、これにより、ホイールシリンダ41〜44はマスタシリンダ14から遮断され、リザーバ24または25と連通する。なお、図2において、DPはダンパ、CVは逆止弁、ORはオリフィス、FTはフィルタを示す。逆止弁CVは、ホイールシリンダ41〜44およびリザーバ24,25からマスタシリンダ14へのブレーキ液の流通を許容する一方、それとは逆方向の流れを遮断する。
【0027】
そして、電磁弁31〜38のソレノイドコイルの通電状態を制御することにより、ホイールシリンダ41〜44のブレーキ液圧を増圧、減圧または保持することが可能となる。すなわち、電磁弁31〜38のソレノイドコイルの非通電時には、ホイールシリンダ41〜44にマスタシリンダ14および液圧ポンプ21または22からブレーキ液が供給され、これにより、ホイールシリンダ41〜44のブレーキ液圧が増圧される。また、電磁弁31〜38のソレノイドコイルの通電時には、ホイールシリンダ41〜44がリザーバ24または25と連通し、ホイールシリンダ41〜44のブレーキ液圧が減圧される。更に、電磁弁31,33,35および37のソレノイドコイルに通電する一方、その他の電磁弁32,34,36および38のソレノイドコイルを非通電とすれば、ホイールシリンダ41〜44のブレーキ液圧が保持される。そして、上記ソレノイドコイルに対する通電、非通電の時間間隔、すなわちデューティーを調整することにより、ホイールシリンダ41〜44のブレーキ液圧を緩やかに増圧(パルス増圧)させることも可能となる。
【0028】
このように構成されるブレーキアクチュエータ20は、図1および図2に示されるように、電子制御ユニット(以下、「ECU」という)100によって制御される。すなわち、ECU100は、車輪FR〜RLのスリップ率に基づいて各車輪FR〜RLに制動力を付与するためのブレーキ圧を増減させるアンチスキッド制御(以下「ABS制御」という)を実行する。ECU100は、図示されないCPU、ROM、RAM、入出力インターフェースおよび記憶装置等を含むものであり、ブレーキアクチュエータ20を構成する電磁弁31〜38のソレノイドコイルの通電状態を制御する。また、上述の液圧ポンプ21および22の電動モータ23もECU100により制御される。
【0029】
図3は、車両1に設けられている制動装置10の制御ブロック図である。なお、ECU100は、各種演算処理を実行するCPU、各種制御プログラムを格納するROM、データ格納やプログラム実行のためのワークエリアとして利用されるRAMを有し、図3においてECU100は、これらCPU、ROM、RAMなどのハードウェア、およびソフトウェアの連携によって実現される機能ブロックとして描かれている。したがって、これらの機能ブロックはハードウェアおよびソフトウェアの組合せによって様々な形で実現することができる。
【0030】
ECU100には、上述の各車輪FR〜RLの車輪速センサ18が接続されている。各車輪速センサ18は、対応する車輪FL〜RRの回転速度すなわち車輪速度と回転方向とを示す信号をECU100に出力する。
【0031】
これに加えて、ECU100には、Gセンサ45、シフトポジションセンサ46、エンジン回転数センサ47、およびオフロードスイッチ50が接続されている。Gセンサ45は、いわゆる2軸加速度センサであり、車両1の前後方向すなわち進行方向における加速度(加減速度)、および車両1の横方向すなわち幅方向における加速度を検出する。Gセンサ45は、車両の前後方向および横方向の加速度を示す信号をECU100に出力する。なお、2軸加速度センサであるGセンサ45に代わって、車両1の前後方向における加速度のみを検出するセンサ、および車両1の横方向における加速度のみを検出するセンサが用いられてもよい。
【0032】
シフトポジションセンサ46は、ドライバーにより設定された変速機3のシフトレンジを検知して、検知したレンジを示す信号をECU100に出力する。エンジン回転数センサ47は、内燃機関2の回転数を検知し、検知した値を示す信号をECU100に出力する。
【0033】
オフロードスイッチ50は、車両客室内の運転席近傍のインスツルメントパネルなどに配置される。オフロードスイッチ50はECU100に接続されており、運転者にオンオフ操作されたときに、オン信号またはオフ信号をECU100に出力する。
【0034】
ECU100は、オフロードスイッチ50が押された場合、オフロード走行に適したABS制御やトラクション制御を実施する。オフロードスイッチ50やオフロードスイッチ50がオンにされた場合のABS制御やトラクション制御は公知の技術であるため、その説明は省略する。
【0035】
また、車両1にはエンジンのスロットルバルブ(図示せず)の開度などを制御するエンジンECU(図示せず)、およびオートマティックトランスミッションのシフトチェンジタイミングなどを制御するトランスミッションECU(図示せず)が設けられている。エンジンECUは、オフロードスイッチ50がオンにされた場合、スロットルバルブを開くタイミングをオフロード走行に適したものに変更し、また、トランスミッションECUは、シフトチェンジタイミングをオフロード走行に適したものに変更する。オフロードスイッチ50がオンにされた場合のスロットルバルブのタイミング変更方法、およびシフトチェンジタイミングの変更方法も公知の技術であるため、説明を省略する。
【0036】
図3に示されるように、ECU100には、スリップ率取得部101、ホイールシリンダ圧制御部(以下「W/C圧制御部」という)102、車速取得部103、推定加速度演算部104、実加速度演算部105、および路面状態判定部106が構築されている。スリップ率取得部101は、ROMなどの記憶部に格納されたスリップ率を示すデータから適切なデータを選択することにより、車輪FR〜RLのスリップ率を取得する。W/C圧制御部102は、スリップ率取得部101により取得された車輪FR〜RLのスリップ率に応じてホイールシリンダ41〜44の目標ホイールシリンダ圧を決定する。また、ECU100は、駆動回路(図示せず)を介して電磁弁31〜38に接続されており、また、リレー(図示せず)を介して電動モータ23に接続されている。W/C圧制御部102は、駆動回路に制御電流を出力し、バッテリ(図示せず)から電磁弁31〜38の各々に供給する電流のデューティーを制御することにより、電磁弁31〜38を開弁または閉弁させ、ホイールシリンダ41〜44のホイールシリンダ圧を増圧または減圧させる。このように、スリップ率取得部101およびW/C圧制御部102は、車両に与える制動力を制御する制動制御部として機能する。
【0037】
車速取得部103は、各車輪速センサ18の検出値に基づいて車両1(車体)の速度としての車体速度Vs、および各車輪の回転加速度としての車輪加速度Dwを取得する。
【0038】
推定加速度演算部104は、まずエンジン回転数センサ47により検出される内燃機関2の回転数と、シフトポジションセンサ46からの信号に基づいて得られる変速機3のギヤ比とに基づいて、駆動輪である各車輪FR〜RLの推定車輪速度を所定のサンプリング時間おきに求める。推定加速度演算部104は、求めた推定車輪速度と当該サンプリング時間とに基づいて推定される車輪加速度を算出し、各車輪FR〜RLの推定される車輪加速度の平均値の推定車輪加速度を算出する。推定加速度演算部104は、この推定車輪加速度を利用して車両1の推定加速度Geを算出する。実加速度演算部105は、Gセンサ45からの信号に基づいて車両1の実際の加速度としての実加速度Gxを算出する。路面状態判定部106は、算出された推定加速度Geおよび実加速度Gxに基づいて、車両1が走行している路面(以下、「走行路」という)の状態を判定する。このようにECU100は、車両に与える制動力を制御する車両制御手段として機能する。
【0039】
車両1が砂地路を走行しているとき、通常路を走行しているときに比べ、同じエンジン出力を発生している場合でも円滑に加速することができず、実加速度Gxが推定加速度Geよりも大きく低下する。ECU100の路面状態判定部106はこれを利用して、推定加速度Geと実加速度Gxとを比較することにより、車両1の走行路が、「通常路」および「砂地路」のどちらかを判定する。なお、通常路とは、砂地路よりも走行抵抗が小さい舗装路や平坦路をいうものとする。
【0040】
路面状態判定部106は推定加速度Geおよび実加速度Gxに基づいて路面状態を判定しており、実際の路面状態を見て判定しているわけではないため、実際には通常路を走行しているにもかかわらず砂地路を走行していると判定される誤判定や、実際には砂地路を走行しているにもかかわらず通常路を走行していると判定される誤判定が生じる可能性がある。前者の誤判定が生じた場合には、実際には通常路を走行しているにもかかわらず砂地路走行に適したABS制御が実施されることになり、後者の誤判定が生じた場合には、実際には砂地路を走行しているにもかかわらず通常路走行に適したABS制御が実施されることになる。
【0041】
ここで、一般的には、砂地路など走行抵抗が高い路面を走行する機会よりも通常路を走行する機会が多いと考えられる。したがって、前者の誤判定が生じる方が、後者の誤判定が生じるよりも、誤った判定結果に基づいて実施されるABS制御によって車両の操作性などに与える影響が大きい。このため、一般には前者の誤判定、すなわち実際には通常路を走行しているにもかかわらず砂地路を走行していると判定される誤判定が生じる可能性が低くなるよう、通常路か砂地路かを判定するための閾値が設定されている。
【0042】
しかしながら、このように判定のための閾値が設定された場合、逆に後者の誤判定、すなわち実際には砂地路を走行しているにもかかわらず通常路を走行していると判定される誤判定が生じる可能性が大きくなるおそれがある。このような誤判定が生じると、砂地路を走行中の車両の操作性が低下するおそれが生じる。このため、車両1の走行路の路面状態に応じた適切なABS制御を実現することを可能とする技術の開発が現在強く求められている。
【0043】
このため、本実施形態に係る路面状態判定部106は、オフロードスイッチ50が運転者によりオンにされた場合、推定加速度Geおよび実加速度Gxの値が通常は車両1の走行路が通常路と判定されるような値となっている場合であっても、他の所定の条件を満たしたときは、車両1の走行路が、通常路および砂地路のどちらの路面も走行し得る路面であるプレ砂地路であると判定する。また、スリップ率取得部101およびW/C圧制御部102は、車両1がプレ砂地路を走行していると判定された場合に、車両1が通常路を走行していると判定された場合に実施するABS制御と、車両1が砂地路を走行していると判定された場合に実施するABS制御の中間的なABS制御を実施する。以下、図4〜図7に関連して、このような制御手順について詳細に説明する。
【0044】
図4は、路面状態判定部106による車両1の走行路の判定手順を示すフローチャートである。本フローチャートにおける処理は、ABS制御が実施されている間、所定時間毎に繰り返し実施される。なお、本フローチャートにおける処理は、イグニッションスイッチ(図示せず)がオンにされたとき開始され、イグニッションスイッチがオフにされるまで所定時間毎に繰り返し実施されてもよい。
【0045】
推定加速度演算部104は、まず推定加速度Geを算出し(S10)、実加速度演算部105は、実加速度Gxを算出する(S12)。推定加速度Geおよび実加速度Gxが算出されると、路面状態判定部106は、推定加速度Geから実加速度Gxを引いた値が第1閾値A1以上か否かを判定する(S14)。
【0046】
推定加速度Geから実加速度Gxを引いた値が第1閾値A1以上と判定された場合(S14のY)、路面状態判定部106は、車両1は砂地路を走行中と判定し、砂地路フラグをオンに設定する(S16)。
【0047】
ここで、オフロードスイッチ50は、車両がオフロード走行をする場合に運転者によりオンにされる。このため、運転者によりオフロードスイッチ50がオンにされたということは、車両1がすでに通常路よりも走行抵抗の大きいオフロードを走行しているか、まだ通常路を走行している場合であっても間もなくオフロードを走行することを示唆すると考えることができる。このため、推定加速度Geから実加速度Gxを引いた値が第1閾値A1より小さいと判定された場合(S14のN)、路面状態判定部106は、オフロードスイッチ50が運転者によりオンにされているか否かを判定する(S18)。
【0048】
オフロードスイッチ50がオンにされている場合(S18のY)、推定加速度Geから実加速度Gxを引いた値が通常路を走行していると判定されるような値であっても、車両1が砂地路を走行する可能性は高いと考えられる。このため、路面状態判定部106は、推定加速度Geから実加速度Gxを引いた値が第2閾値A2以上か否かを判定することにより、車両1の走行路がプレ砂地路か否かを判定する(S20)。なお、第2閾値A2は、第1閾値A1よりも小さい値とされている。推定加速度Geから実加速度Gxを引いた値が第2閾値A2以上の場合(S20のY)、路面状態判定部106は、車両1がプレ砂地路を走行中と判定し、プレ砂地路フラグをオンに設定する(S22)。
【0049】
オフロードスイッチ50がオフにされている場合(S18のN)は、車両1がプレ砂地路を走行する可能性は低いと考えられる。また、オフロードスイッチ50がオンにされている場合であっても、推定加速度Geから実加速度Gxを引いた値が第2閾値A2より小さい場合(S20のN)、車両1がすぐに通常路を走行する可能性は低いと考えられる。このため、路面状態判定部106は、これらの場合には車両1が通常路を走行していると判定し、通常路フラグをオンに設定する(S24)。
【0050】
図5(a)に、オフロードスイッチ50がオフにされている場合の、通常路と判定される通常路判定領域と、砂地路と判定される砂地路判定領域との関係を示し、図5(b)に、オフロードスイッチ50がオンにされた場合の、通常路判定領域、砂地路判定領域、およびプレ砂地路判定領域の関係を示す。図5(a)および(b)において、横軸は推定加速度Ge、縦軸は実加速度Gxを表す。
【0051】
オフロードスイッチ50がオフになっている場合、推定加速度Ge−実加速度Gx=第1閾値A1の直線(以下、「直線L1」という)を境に、右下の領域が砂地路判定領域となり、左上の領域が通常路判定領域となる。オフロードスイッチ50がオンになった場合、直線L1を境に右下の領域では、オフロードスイッチ50がオフになっている場合と同様に砂地路判定領域となる。しかし、直線L1を境に左上の領域では、推定加速度Ge−実加速度Gx=第2閾値A2の直線を直線L2として、直線L1より左上の領域は通常路判定領域となり、直線L1と直線L2とに囲まれる領域がプレ砂地路判定領域となる。
【0052】
このように、路面状態判定部106は、オフロードスイッチ50がオフになっているときでは通常路判定領域となる領域のうち砂地路判定領域に近い領域を、オフロードスイッチ50がオンになっているときにはプレ砂地路判定領域とする。これによって、実際には砂地路を走行しているにもかかわらず通常路と判定される誤判定を効果的に減少させることが可能となる。
【0053】
図6は、本実施形態に係るABS制御の制御手順を示すフローチャートである。イグニッションスイッチがオンにされたとき開始され、イグニッションスイッチがオフにされるまで所定時間毎に繰り返し実施される。
【0054】
スリップ率取得部101は、例えばABS制御中か否かを示すABSフラグがオンに設定されているか否かを判定することによりABS制御中か否かを判定し(S30)、ABS制御中でない場合(S30のN)、本フローチャートにおける処理を一旦終了する。なお、以下において説明する第1スリップ率St1〜第4スリップ率St4を示すデータはROMなどの記憶部に予め格納されている。
【0055】
ABS制御中の場合(S30のY)、スリップ率取得部101は、まず通常路フラグがオンに設定されているか否かを判定することにより、車両1が通常路を走行しているか否かを判定する(S32)。車両1が通常路を走行していると判定された場合(S32のY)、スリップ率取得部101は、目標スリップ率を一番低い値である第1スリップ率St1に設定する(S34)。
【0056】
車両1が通常路を走行していないと判定された場合(S32のN)、スリップ率取得部101は、プレ砂地路フラグがオンに設定されているか否かを判定することにより、車両1がプレ砂地路を走行しているか否かを判定する(S36)。車両1がプレ砂地路を走行していると判定された場合(S36のY)、スリップ率取得部101は、目標スリップ率を、上述の第1スリップ率St1と、同じくオフロードスイッチ50がオフとなっている場合に車両1が砂地路を走行していると判定された場合に設定される第3スリップ率St3との中間の値である第2スリップ率St2に設定する(S38)。
【0057】
目標スリップ率をこのような値に設定することにより、誤判定によって第1スリップ率St1が設定されるべき場合に第3スリップ率St3が設定されたり、第3スリップ率St3が設定されるべき場合に第1スリップ率St1が設定されるなど、本来設定されるべきスリップ率と大きく異なる値に目標スリップ率が設定されることを回避することができる。これによって、実際の路面状況に適さないABS制御が実施されることを抑制することができる。
【0058】
車両1がプレ砂地路を走行していないと判定された場合(S36のN)、スリップ率取得部101は、車両1は砂地路を走行していると判定し、次にオフロードスイッチ50がオンにされているか否かを判定する(S40)。スリップ率取得部101は、オフロードスイッチ50がオフにされている場合(S40のN)、目標スリップ率を第3スリップ率St3に設定し(S44)、オフロードスイッチ50がオンにされている場合(S40のY)、目標スリップ率を第3スリップ率St3よりも大きな値である第4スリップ率St4に設定する(S42)。
【0059】
目標スリップ率が設定されると、W/C圧制御部102は、設定された目標スリップ率に基づいてホイールシリンダ41〜44の各々の目標ホイールシリンダ圧を決定する(S46)。なお、目標ホイールシリンダ圧の決定方法は公知の技術であるため説明を省略する。目標ホイールシリンダ圧を決定すると、W/C圧制御部102は、決定した目標ホイールシリンダ圧を達成するようホイールシリンダ41〜44の各々のホイールシリンダ圧を制御する(S48)。
【0060】
図7は、本実施形態に係る制動装置10のS−μ特性と第1スリップ率St1〜第4スリップ率St4との関係を示す図である。図7では、横軸にスリップ率S、縦軸に路面との摩擦係数μが表されている。図7に示すように、通常路のS−μ特性は、スリップ率Sが大きくなるにしたがって、路面との摩擦係数μが当初急激に上昇し、その後緩やかに低下する。これに対して、砂地路のS−μ特性は、スリップ率Sが大きくなるにしたがって緩やかに上昇していく。
【0061】
このため、通常は、車両1が通常路を走行していると判定された場合は、通常路のS−μ特性において路面との摩擦係数μが高い値となるよう第1スリップ率St1を低い値に設定し、車両1が砂地路を走行していると判定された場合は、砂地路のS−μ特性において路面との摩擦係数μが高い値となるよう、第3スリップ率St3を第1スリップ率St1よりも高い値に設定する。こうすることにより、路面との摩擦係数μを常に高い値に維持し、良好なABS制御の実現することが可能となる。
【0062】
しかし、例えば実際は車両1が通常路を走行しているにもかかわらず砂地路を走行していると誤判定された場合、目標スリップ率が、第1スリップ率St1に本来設定すべきところ第3スリップ率St3に設定されることになる。このため、路面との摩擦係数μはμ4からμ3に低下し、本来実現すべき良好なABS制御の実現が困難なものとなる。
【0063】
また、実際が車両1が砂地路を走行しているにもかかわらず通常路を走行していると誤判定された場合、目標スリップ率が、第3スリップ率St3に本来設定すべきところ第1スリップ率St1に設定されることになる。このため、路面との摩擦係数μはμ2からμ1に低下し、この場合も本来実現すべき良好なABS制御の実現が困難なものとなる。
【0064】
本実施形態のように、車両1がプレ砂地路を走行していると判定された場合に目標スリップ率を第2スリップ率St2に設定することにより、このような路面との摩擦係数μの大きな変動を抑制することが可能となる。これによって、路面状態が誤判定された場合においても、本来実施すべきABS制御と大きく異なるABS制御が実施されることを回避することができる。
【0065】
また、オフロードスイッチ50がオンにされている場合は、車両1が実際は通常路を走行しているにもかかわらず砂地路を走行していると判定される可能性は低いと考えられる。このため、本実施形態では、オフロードスイッチ50がオンにされた状態で車両1が砂地路を走行していると判定された場合、目標スリップ率を第3スリップ率St3よりも大きい値である第4スリップ率St4に設定する。このように、オフロードスイッチ50がオンにされた状態で車両1が砂地路を走行していると判定された場合、オフロードスイッチ50がオフにされている場合よりも目標スリップ率を大きな値とすることにより、路面との摩擦係数μをさらに大きな値とし、さらに良好なABS制御を実施することを可能としている。
【0066】
本発明は上述の実施形態に限定されるものではなく、また、当業者の知識に基づいて各種の設計変更等の変形を実施形態に対して加えることも可能であり、そのような変形が加えられた実施形態も本発明の範囲に含まれうる。以下、そうした例をあげる。
【0067】
ある変形例では、車両1の客室内における運転席周辺のインスツルメントパネルに、デフロックスイッチ(図示せず)が設けられる。デフロックスイッチがオンにされた場合、ディファレンシャルがロックされ、左右輪の作動が規制された状態となる。これによって、例えば片輪がぬかるみなどにはまった場合に車両1の脱出が可能となる。デフロックスイッチ、およびデフロックスイッチがオンにされた場合のこのような車両制御は公知の技術であるため説明を省略する。路面状態判定部106は、デフロックスイッチが運転者によりオンにされた場合、デフロックスイッチがオフにされている場合に車両1の走行路が通常路と判定されるような場合であっても、他の所定の条件を満たしたときは、車両1の走行路がプレ砂地路であると判定する。この場合の所定の条件とは、上述の実施形態のように、推定加速度Geおよび実加速度Gxが図5(b)における直線L1と直線L2の間の値となることであってもよい。
【0068】
このようなデフロックスイッチは、オフロードスイッチ50と同様、車両1がオフロードなど走行抵抗の大きい路面を走行するときに運転者によりオンにされる。このため、デフロックスイッチがオンにされた場合は、推定加速度Geおよび実加速度Gxからは車両1が通常路を走行していると判定されるような場合であっても、実際は車両1がオフロードなど走行抵抗の大きい路面を走行している、または直後にそのような路面を走行する可能性が高いことを示唆しているということができる。このため、デフロックスイッチがオンにされた場合であって、所定の条件を満たす場合にプレ砂地路であると判定することにより、路面状態の誤判定によるABSへの影響を抑制することができる。
【0069】
ある別の変形例では、車両1にはカーナビゲーションシステムが搭載されている。このカーナビゲーションシステムは、CPU、ROM、およびRAMを有する電子制御部を備え、この電子制御部は、GPS(Global Positioning System)により車両1の位置情報を取得すると共に、取得した車両1の位置情報を利用して、DVDまたはハードディスクなどの記憶部に格納された地図情報の中から車両1周辺の地図情報を取得する。カーナビゲーションシステムは公知の技術であるため、その構成に関するこれ以上の詳細な説明は省略する。
【0070】
ECU100は、カーナビゲーションシステムの電子制御部が取得した車両1の位置情報、および車両1周辺の地図情報を取得する。路面状態判定部106は、取得した車両1の位置情報および地図情報を利用して、車両1が砂地路や砂利路、またはダートなどの走行抵抗が高い路面を走行しているか否かを判定する。車両1がこのような走行抵抗の高い路面を走行していると判定した場合、路面状態判定部106は、通常は車両1の走行路が通常路と判定されるような場合であっても、他の所定の条件を満たしたときは、車両1の走行路がプレ砂地路であると判定する。なお、この場合の所定の条件も、上述の実施形態のように、推定加速度Geおよび実加速度Gxが図5(b)における直線L1と直線L2の間の値となることであってもよい。
【0071】
このように、カーナビゲーションシステムによって車両1が走行抵抗の高い路面を走行していることが検出された場合、推定加速度Geおよび実加速度Gxからは車両1が通常路を走行していると判定されるような場合であっても、車両1がオフロードなど走行抵抗の大きい路面を走行している、または直後にそのような路面を走行する可能性が高いことを示唆しているということができる。このため、カーナビゲーションシステムによって車両1が走行抵抗の高い路面を走行していることが検出された場合においても、所定の条件を満たす場合にプレ砂地路であると判定することにより、路面状態の誤判定によるABSへの影響を抑制することができる。
【0072】
また、ある別の変形例では、エンジンECUも路面状態判定部を有し、ECU100の路面状態判定部106と同様に、車両1の走行路が通常路か、砂地路か、またはプレ砂地路かを判定する。車両1がプレ砂地路を走行していると判定された場合、エンジンECUは、車両1が通常路を走行していると判定された場合のスロットルバルブを開くタイミングと、車両1が砂地路を走行していると判定された場合のスロットルバルブを開くタイミングとの中間のタイミングでスロットルバルブを開放させる。これによって、車両1の走行路が誤判定された場合においても、スロットルバルブが車両1が走行する路面状態に適したタイミングから大きく外れたタイミングで開放させることを回避することができる。
【0073】
また、ある別の変形例では、トランスミッションECUも路面状態判定部を有し、ECU100の路面状態判定部106と同様に、車両1の走行路が通常路か、砂地路か、またはプレ砂地路かを判定する。車両1がプレ砂地路を走行していると判定された場合、トランスミッションECUは、車両1が通常路を走行していると判定された場合のシフトチェンジタイミングと、車両1が砂地路を走行していると判定された場合のシフトチェンジタイミングとの中間のタイミングでシフトチェンジを行う。これによって、車両1の走行路が誤判定された場合においても、シフトチェンジが車両1が走行する路面状態に適したタイミングから大きく外れたタイミングで行われることを回避することができる。
【図面の簡単な説明】
【0074】
【図1】本発明による車両走行路判別装置が適用された車両を示す概略構成図である。
【図2】制動装置に含まれるブレーキアクチュエータの系統図である。
【図3】車両に設けられている制動装置の制御ブロック図である。
【図4】路面状態判定部による車両の走行路の判定手順を示すフローチャートである。
【図5】(a)は、オフロードスイッチがオフにされている場合の、通常路と判定される通常路判定領域と、砂地路と判定される砂地路判定領域との関係を示す図であり、(b)は、オフロードスイッチがオンにされた場合の、通常路判定領域、砂地路判定領域、およびプレ砂地路判定領域の関係を示す図である。
【図6】本実施形態に係るABS制御の制御手順を示すフローチャートである。
【図7】本実施形態に係る制動装置のS−μ特性と第1スリップ率St1〜第4スリップ率St4との関係を示す図である。
【符号の説明】
【0075】
1 車両、 2 内燃機関、 13 マスタシリンダ圧センサ、 17 ブレーキランプスイッチ、 18 車輪速センサ、 20 ブレーキアクチュエータ、 45 Gセンサ、 47 エンジン回転数センサ、 100 ECU、 101 スリップ率取得部、 102 W/C圧制御部、 103 車速取得部、 104 推定加速度演算部、 105 実加速度演算部、 106 路面状態判定部。
【特許請求の範囲】
【請求項1】
車両が第1状態および第2状態のどちらにあるかを判定する車両状態判定手段と、
車両が第1状態にあると判定された場合に、第1状態に適応させるよう車両の挙動を制御する第1車両制御を実施し、車両が第2状態にあると判定された場合に、第2状態に適応させるよう車両の挙動を制御する第2車両制御を実施する車両制御手段と、
を備え、
前記車両状態判定手段は、車両が第2状態と同一または類似の状態となる可能性が高いことを示唆する示唆情報を取得した場合、通常は車両が第1状態にあると判定されるような場合であっても、所定の条件を満たしたときは、第1状態および第2状態の中間状態に車両があると判定し、
前記車両制御手段は、車両が中間状態にあると判定された場合に、第1車両制御と第2車両制御の中間的な制御である中間的車両制御を実施することを特徴とする車両制御装置。
【請求項2】
前記車両状態判定手段は、車両が第1状態および第2状態のどちらにあるかの判定として、車両の走行路が第1路面状態か、第1路面状態よりも走行抵抗が大きい第2路面状態かを判定し、
車両が第2路面状態または第2路面状態に類似する状態の路面を走行する可能性が高いことを示唆する示唆情報を取得した場合、通常は車両の走行路が第1路面状態と判定されるような場合であっても、所定の条件を満たしたときは、車両の走行路が第1路面状態および第2路面状態の中間状態にあると判定することを特徴とする請求項1に記載の車両制御装置。
【請求項3】
前記車両状態判定手段は、車両を走行させるための駆動源の出力に基づいて車両に発生していると推定される推定加速度を算出し、算出された推定加速度と車両に実際に発生している実加速度とを比較して、車両の走行路が第1路面状態か第2路面状態かを判定することを特徴とする請求項2に記載の車両制御装置。
【請求項4】
ユーザによりオンオフ操作される手動入力手段をさらに備え、
前記車両状態判定手段は、前記手動入力手段がオンにされたことを示すオン信号を取得した場合、通常は第1状態と判定されるような場合であっても、所定の条件を満たしたときは、車両が中間状態にあると判定することを特徴とする請求項1から3のいずれかに記載の車両制御装置。
【請求項5】
前記手動入力手段は、オフロード走行に適応した車両の挙動の制御を実施させるべくユーザによって操作されるオフロードスイッチであることを特徴とする請求項4に記載の車両制御装置。
【請求項6】
前記車両制御手段は、車両が第1状態にあると判定された場合に、目標スリップ率を第1スリップ率に設定して車両に与える制動力を制御する第1車両制御を実施し、車両が第2状態にあると判定された場合に、目標スリップ率を第2スリップ率に設定して車両に与える制動力を制御する第2車両制御を実施し、車両が中間状態にあると判定された場合に、目標スリップ率を、第1スリップ率と第2スリップ率の中間の値である第3スリップ率に設定して車両に与える制動力を制御する中間的車両制御を実施することを特徴とする請求項1から5のいずれかに記載の車両制御装置。
【請求項1】
車両が第1状態および第2状態のどちらにあるかを判定する車両状態判定手段と、
車両が第1状態にあると判定された場合に、第1状態に適応させるよう車両の挙動を制御する第1車両制御を実施し、車両が第2状態にあると判定された場合に、第2状態に適応させるよう車両の挙動を制御する第2車両制御を実施する車両制御手段と、
を備え、
前記車両状態判定手段は、車両が第2状態と同一または類似の状態となる可能性が高いことを示唆する示唆情報を取得した場合、通常は車両が第1状態にあると判定されるような場合であっても、所定の条件を満たしたときは、第1状態および第2状態の中間状態に車両があると判定し、
前記車両制御手段は、車両が中間状態にあると判定された場合に、第1車両制御と第2車両制御の中間的な制御である中間的車両制御を実施することを特徴とする車両制御装置。
【請求項2】
前記車両状態判定手段は、車両が第1状態および第2状態のどちらにあるかの判定として、車両の走行路が第1路面状態か、第1路面状態よりも走行抵抗が大きい第2路面状態かを判定し、
車両が第2路面状態または第2路面状態に類似する状態の路面を走行する可能性が高いことを示唆する示唆情報を取得した場合、通常は車両の走行路が第1路面状態と判定されるような場合であっても、所定の条件を満たしたときは、車両の走行路が第1路面状態および第2路面状態の中間状態にあると判定することを特徴とする請求項1に記載の車両制御装置。
【請求項3】
前記車両状態判定手段は、車両を走行させるための駆動源の出力に基づいて車両に発生していると推定される推定加速度を算出し、算出された推定加速度と車両に実際に発生している実加速度とを比較して、車両の走行路が第1路面状態か第2路面状態かを判定することを特徴とする請求項2に記載の車両制御装置。
【請求項4】
ユーザによりオンオフ操作される手動入力手段をさらに備え、
前記車両状態判定手段は、前記手動入力手段がオンにされたことを示すオン信号を取得した場合、通常は第1状態と判定されるような場合であっても、所定の条件を満たしたときは、車両が中間状態にあると判定することを特徴とする請求項1から3のいずれかに記載の車両制御装置。
【請求項5】
前記手動入力手段は、オフロード走行に適応した車両の挙動の制御を実施させるべくユーザによって操作されるオフロードスイッチであることを特徴とする請求項4に記載の車両制御装置。
【請求項6】
前記車両制御手段は、車両が第1状態にあると判定された場合に、目標スリップ率を第1スリップ率に設定して車両に与える制動力を制御する第1車両制御を実施し、車両が第2状態にあると判定された場合に、目標スリップ率を第2スリップ率に設定して車両に与える制動力を制御する第2車両制御を実施し、車両が中間状態にあると判定された場合に、目標スリップ率を、第1スリップ率と第2スリップ率の中間の値である第3スリップ率に設定して車両に与える制動力を制御する中間的車両制御を実施することを特徴とする請求項1から5のいずれかに記載の車両制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2008−290583(P2008−290583A)
【公開日】平成20年12月4日(2008.12.4)
【国際特許分類】
【出願番号】特願2007−138363(P2007−138363)
【出願日】平成19年5月24日(2007.5.24)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成20年12月4日(2008.12.4)
【国際特許分類】
【出願日】平成19年5月24日(2007.5.24)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]