
車両制御装置
【課題】制動偏向を低減し、制動時における車両安定性を向上させることが可能な車両制御装置を提供すること。
【解決手段】直進制動状態において、左右軸重差を減少させることで、車両10の左右方向の重量バランスを補正して、制動偏向を低減させる。この車両制御装置30では、複数の燃料室70A〜70Dを有する構成とし、左右軸重差に基づいて、燃料室間で燃料の移送を行うことで、重量バランスを補正して、制動偏向を低減し、車両の安定性の向上を図る。
【解決手段】直進制動状態において、左右軸重差を減少させることで、車両10の左右方向の重量バランスを補正して、制動偏向を低減させる。この車両制御装置30では、複数の燃料室70A〜70Dを有する構成とし、左右軸重差に基づいて、燃料室間で燃料の移送を行うことで、重量バランスを補正して、制動偏向を低減し、車両の安定性の向上を図る。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、直進制動状態における車両を制御する車両制御装置に関するものである。
【背景技術】
【0002】
従来、制動時における車両を制御する技術として、特許文献1,2に記載のものがある。特許文献1に記載のタイヤ空気圧制御装置では、運転者の操舵以外の要因により車両の重心回りに回転モーメントが発生した結果、車両が緩やかに旋回してしまう偏向状態を検出し、左右のタイヤの空気圧の比率を変更することにより、車両の重心回りに偏向状態を消滅させる方向の回転モーメントを発生させて、車両の偏向状態の低減を図っている。
【0003】
また、特許文献2に記載の制動力配分制御方向では、直進制動状態において、左側の前輪と後輪との制動力の和と右側の前輪と後輪との制動力の和とが均等になるように各車輪に制動力を配分することで、左右制動力差によるヨーモーメントの発生を回避しようとしている。
【特許文献1】特開2006−62381号公報
【特許文献2】特開平5−262213号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
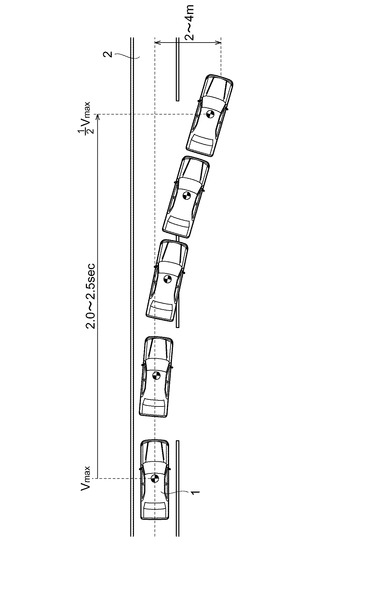
図8は、直進制動時における車両の偏向状態を示す平面図である。図8に示すように、車両1が例えば高速走行している場合に、運転者が制動操作を行うと、車両1の重心回りに回転モーメントが発生し、車両1が緩やかに旋回する偏向が発生して、制動時の車両1の安定性が低下するおそれがある。例えば、図8に示す車両の偏向状態では、制動操作開始後2.0〜2.5秒で、車速が制動開始から半減し、車両1は、道路2の幅方向に2〜4mずれてしまっている。
【0005】
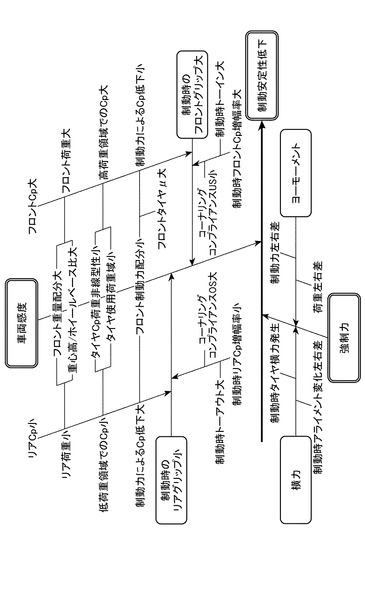
車両の偏向状態は、制動をきっかけとし、その要因は、強制力と車両感度とに関係している。なお、以下の説明において、制動をきっかけとして発生する偏向を「制動偏向」という。図9は、制動偏向の要因を示す図である。図9に示すように、車両の制動偏向は、様々な要因より発生する。なお、以下の説明において、タイヤのコーナリングパワーを「CP」と記し、前輪のコーナリングパワーを「フロントCP」、後輪のコーナリングパワーを「リアCP」と記す。図9に示す制動偏向の要因としては、主に車両感度と強制力が挙げられる。また、車両感度に影響を与える要因として、制動時のリアタイヤのグリップ力が小さいこと、制動時のフロントグリップ力が大きいこと等が挙げられ、強制力に影響を与える要因として、横力、ヨーモーメントが挙げられる。
【0006】
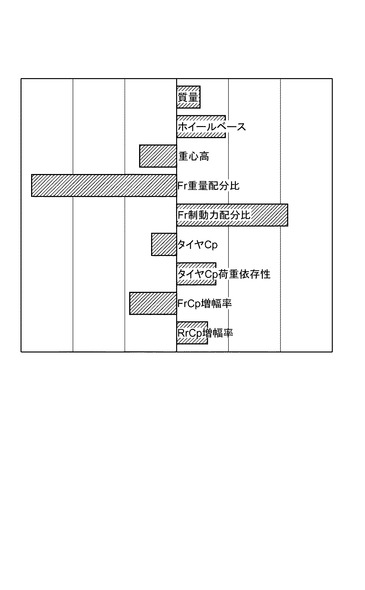
図10は、車両感度の要因を示す図である。図10では、各要因(例えば、質量、重心高、タイヤCp荷重依存性等)の変化割合に対する車両感度への影響の大きさについて、棒グラフで示し、棒グラフが、右側に伸びるほど車両感度が改善され、左側に伸びるほど車両感度が悪化することを表現している。例えば、質量が増加した場合には車両感度が改善され、重心高さが増加した場合には車両感度が悪化する。また、左右軸重差(左右前輪の軸重の差、Fr重量配分比)が増加した場合には車両感度が悪化する。換言すれば、左右軸重差を減少すると、車両感動を改善することができる。
【0007】
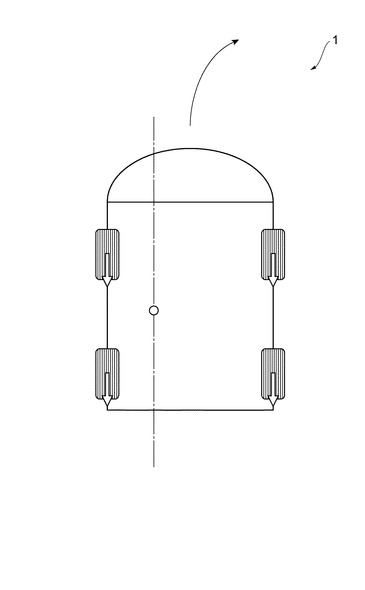
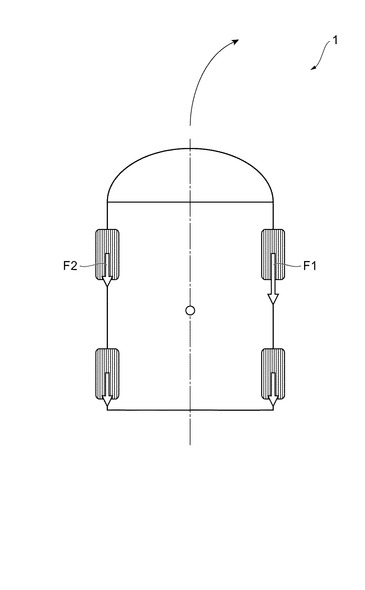
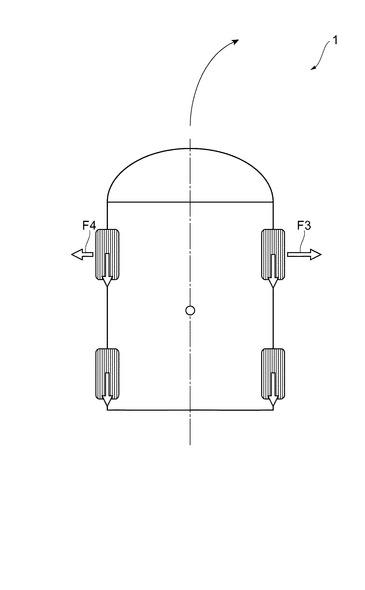
図11は、左右軸重差がある場合に車両に作用する強制力を示す概略図、図12は、左右制動力差がある場合に車両に作用する強制力を示す概略図、図13は、横力がある場合に車両に作用する強制力を示す概略図である。図11に示す車両1では、重心が左側に移動して左右軸重差が発生し、車両1を右側に偏向させる強制力が作用している。また、図12に示す車両1では、右フロントの制動力F1が左フロントの制動力F2より大きくなる左右制動力差が発生し、車両1を右側に偏向させる強制力が作用している。また、図13に示す車両1では、右方向へ移動させる横力F3が左方向へ移動させる横力F4より大きく、車両1を右側に偏向させる強制力が作用している。そして、このような制動偏向を低減し、制動時における車両安定性を向上させることが求められている。
【0008】
本発明は、このような課題を解決するために成されたものであり、制動偏向を低減し、制動時における車両安定性を向上させることが可能な車両制御装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明の車両制御装置は、車両直進中に制動操作された状態である直進制動状態における車両を制御する制御手段を備えた車両制御装置であって、制御手段は、直進制動状態である場合に、左右輪の軸重の差である左右軸重差を減少させる軸重制御を実行することを特徴としている。
【0010】
このような車両制御装置によれば、直進制動状態において、左右軸重差を減少させることができるため、車両の左右方向の重量バランスを補正して、制動偏向を低減させることができる。
【0011】
ここで、制御手段は、軸重制御として、燃料タンクの左右方向の重量配分を変更する構成が挙げられる。また、燃料タンクは、左右方向の異なる位置に設けられ、互いに連通可能且つ遮断可能とされた複数の燃料室を有し、制御手段は、軸重制御として、燃料室内の燃料を移動させて、燃料タンクの左右方向の重量配分を変更する構成が挙げられる。このように、複数の燃料室を備え、互いの燃料室間で燃料の移動及び隔離が可能な構成であるため、燃料室間で燃料を移動させて、車両の左右方向の重量バランスを補正して、制動偏向を低減させることができる。
【0012】
また、燃料タンクは、左右方向及び前後方向に対称に配置され、互いに均等である複数の燃料室を有することがより好ましい。これにより、均等である複数の燃料室が左右前後に対称に配置されているため、精度良く車両の重量バランスを補正して、制動偏向を低減させることができる。
【0013】
また、制御手段は、直進制動状態である場合に、タイヤ接地面から車両の重心までの高さである重心高さを低下させる重心高さ制御を実行することが好ましい。これにより、重心高さを低下させることで、直進制動状態における制動偏向を低減することができる。
【0014】
また、エンジンの車高方向の位置を制御するエンジン位置制御手段を更に備え、制御手段は、重心高さ制御として、エンジン位置制御手段を用いてエンジンの車高方向の位置を低下させる構成が挙げられる。これにより、エンジン位置を低下させて、車両の重心高さを低下させることができる。
【0015】
また、エンジン位置制御手段は、液密構造を有し、エンジンを下方から支持するエンジンマウントを有し、制御手段は、重心高さ制御として、エンジンマウント内の液体をエンジンマウント外に移動させて、エンジンの位置を低下させてもよい。
【0016】
また、車体の車高方向の位置を制御する車体位置制御手段を更に備え、制御手段は、重心高さ制御として、車体位置制御手段を用いて車体の車高方向の位置を低下させる構成が挙げられる。
【0017】
また、車体位置制御手段は、圧縮空気が封入された空気ばねを有するエアサスペンションを備え、制御手段は、重心高さ制御として、エアサスペンションを用いて車体の車高方向の位置を低下させることが好ましい。なお、エアサスペンションは、圧縮空気に代えてその他のガス(例えば、不活性ガス、窒素ガス等)が封入されたガスばねを有するものを含むものとする。
【0018】
また、車体位置制御手段は、タイヤ空気圧を低下させるタイヤ空気圧制御手段を有し、制御手段は、重心高さ制御として、タイヤ空気圧制御手段を用いてタイヤ圧を低下させ、車体の車高方向の位置を低下させることが好ましい。なお、タイヤ空気圧制御手段は、タイヤ内の圧力を低下させるものを含み、タイヤ内に空気以外の流体(例えば、不活性ガス、窒素ガス)が充填されている場合には、タイヤ内のその他の流体の圧力を低下させるものを含んでいる。
【0019】
また、制御手段は、車両の前後方向の重量配分を変更する前後配分変更制御を実行してもよい。これにより、車両の前後方向の重量配分を変更することができるため、車両の重心を後方に移動させて、直進制動状態における制動偏向を抑制することができる。
【0020】
また、制御手段は、前後配分変更制御として、直進制動状態である場合に、燃料タンクの前後方向の重量配分を変更する構成が挙げられる。これにより、直進制動状態において、燃料タンクの前後方向の重量配分を変更して、リア残り荷重を増加させることで、制動偏向を抑制して車両安定性を向上させることができる。
【0021】
また、座席を前後方向に移動させる座席駆動手段を更に備え、制御手段は、前後配分変更制御として、座席が使用されていない場合に、座席駆動手段によって、座席を後方へ移動させることが好ましい。また、座席の背もたれを後方へ傾斜させる背もたれ駆動手段を更に備え、制御手段は、前後配分変更制御として、座席が使用されていない場合に、背もたれ駆動手段によって、背もたれを後方へ傾斜させることが好ましい。これにより、座席が使用されていない場合に、座席を後方へ移動させること、背もたれを後方に傾斜させることにより、好適に車両の重心を後方へ移動させることができる。
【0022】
また、左右輪の軸重を検出する複数の軸重検出手段を更に備え、制御手段は、軸重検出手段によって検出された軸重に基づいて、左右軸重差を算出することが好ましい。
【発明の効果】
【0023】
本発明の車両制御装置によれば、制動偏向を低減し、制動時における車両安定性を向上させることができる。
【発明を実施するための最良の形態】
【0024】
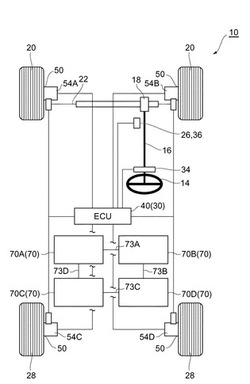
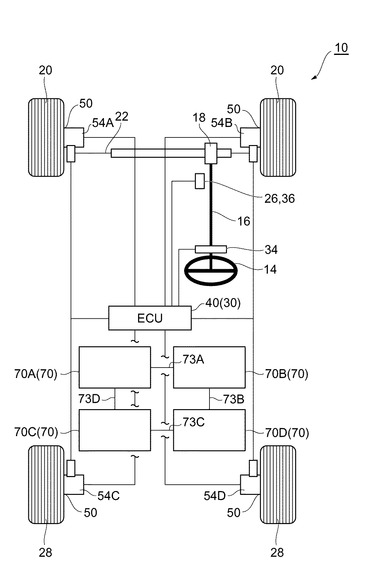
以下、本発明による車両制御装置の好適な実施形態について図面を参照して説明する。なお、図面の説明において同一または相当要素には同一の符号を付し、重複する説明は省略する。図1は、本発明の第1実施形態に係る車両制御装置を搭載した車両の概略構成図、図2は、本発明の第1実施形態に係る車両制御装置を示すブロック構成図である。
【0025】
図1に示す車両10は、車両10の操舵を行う操舵装置を備え、この操舵装置は、運転者によって回動操作されるステアリングホイール14、このステアリングホイール14の回動を伝達するステアリングシャフト16、このステアリングシャフト16の回動を直線運動に変換する例えばラックアンドピニオン式ステアリングギアボックス18、及びこのステアリングギアボックス18により変換された直線運動をフロントタイヤ20に伝達するサイドロッド22を備えている。そして、操舵装置は、ステアリングホイール14の回動に応じてフロントタイヤ20を転舵する。
【0026】
また、車両10は、車両10の制動を行う制動装置を備え、この制動装置は、運転者によって押圧操作されるブレーキペダル26と、ブレーキペダル26による操作に応じてフロントタイヤ20、リアタイヤ28に制動力を付与するブレーキアクチュエータと、このブレーキアクチュエータによる制動力を制御するブレーキECUとを備えている。そして、制動装置は、ブレーキペダル26の踏み込み量に応じて、フロントタイヤ20及びリアタイヤ28に制動力を発生させる。
【0027】
また、車両10の燃料を貯留する燃料タンク70は、複数の(本実施形態では4つ)の燃料室70A〜70Dを有している。これらの燃料室70A〜70Dは、車両10の左右方向及び前後方向に対称に配置され、互いに均等に構成され、燃料室70Aは、左側前部、燃料室70Bは、右側前部、燃料室70Cは、左側後部、燃料室70Dは、右側後部に、各々配置されている。
【0028】
なお、これらの燃料室70A〜70Dには、燃料室内の液面を計測する液面計71A〜71D、燃料の温度を計測する温度計72を各々備える構成としてもよい。これらの液面計71A〜71D及び温度計72は、計測したデータを後述するECU40に出力し、ECU40は、これらのデータに基づいて、各燃料室70A〜70Dの燃料質量を精度よく検出することができる。
【0029】
また、各燃料室70A〜70Dは、配管73A〜73Dによって互いに連結され、各燃料室70A〜70D間で、燃料の移動及び、遮断が可能な構成とされている。具体的には、燃料室70A,70Bを連通する配管73A、燃料室70B,70Cを連通する配管73B、燃料室70C,70Dを連通する配管73C、燃料室70C,70Dを連通する配管73Dを有している。
【0030】
これらの配管73A〜73Dには、燃料室70A〜70D間の燃料の移動を可能とする燃料移送ポンプ74A〜74Dが各々設置されている。また、これらの配管73A〜73Dには、各燃料室70A〜70D間の燃料の移動を遮断する開閉バルブ75A〜75Dが各々設置されている。
【0031】
燃料移送ポンプ74A〜74Dは、ECU40からの駆動信号に基づいて作動し正逆回転可能であり、一方の燃料室から他方の燃料室への燃料の移送を可能とすると共に、他方の燃料室から一方の燃料室への燃料の移送を可能とする。
【0032】
開閉バルブ75A〜75Dは、ECU40からの駆動信号に基づいて開閉可能であり、燃料移送時において、開状態とされ、燃料移送終了後に閉状態とされ、燃料の移動を遮断する。
【0033】
また、これらの配管73A〜73Dに流量計76A〜76Dを設け、各燃料室70A〜70D間を移動する燃料の流量(体積流量)を計測し、そのデータをECU40に出力する構成としてもよい。
【0034】
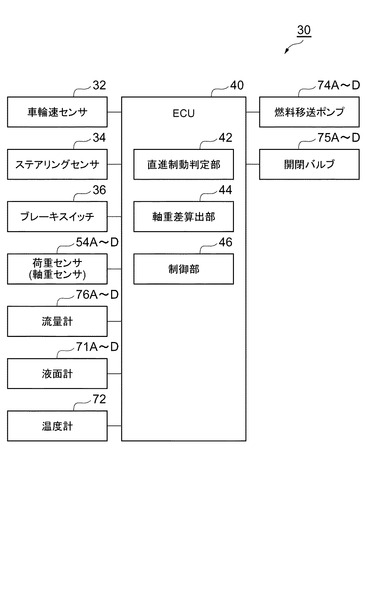
ここで、本発明の実施形態に係る車両制御装置30は、車両10に搭載され、直進制動時の車両10の安定性能を向上させるものである。具体的には、直進制動時において、各燃料室70A〜70Dの燃料を移送して、車両10の重量バランスを補正して、制動偏向を抑制するものである。図2に示すように、車両制御装置30は、車輪速センサ32、ステアリングセンサ34、ブレーキスイッチ36、タイヤ空気圧センサ38、ECU(電子制御ユニット)40、荷重センサ54A〜54D、液面計71、温度計72、燃料移送ポンプ74A〜74D、開閉バルブ75A〜75D、流量計76A〜76Dを備えている。そして、ECU40は、車輪速センサ32、ステアリングセンサ34、ブレーキスイッチ36、荷重センサ54A〜54D、液面計71、温度計72、燃料移送ポンプ74A〜74D、開閉バルブ75A〜75D、及び流量計76A〜76Dと電気的に接続されている。
【0035】
車輪速センサ32は、車両10の4輪にそれぞれ設けられ、車輪の回転速度(車輪の回転に応じたパルス数)を検出するセンサである。車輪速センサ32では、所定時間毎の車輪の回転パルス数を検出し、その検出した車輪回転パルス数をECU40に出力する。ECU40では、各車輪の回転速度から車輪速をそれぞれ算出し、各輪の車輪速から車体速(車速)を算出する。
【0036】
ステアリングセンサ34は、ステアリング操作(操舵操作)を検出する本発明の操舵操作検出手段として機能するものであり、例えばコンビネーションスイッチ部に設けられ、ステアリングホイール14の回転を検出して、操舵方向及び操舵量を検出する。そして、ステアリングセンサ34は、操舵方向および操舵量に関する情報をECU40に出力する。
【0037】
ブレーキスイッチ36は、ブレーキ操作(制動操作)を検出する本発明の制動操作検出手段として機能するものであり、例えばブレーキペダル26に取り付けられ、運転者によるブレーキペダル操作を検出する。そして、ブレーキスイッチ36は、運転者がブレーキペダル26を操作して車両10を制動させようとした際に、ブレーキ操作を検出したことを示す検出信号をECU40に出力する。
【0038】
荷重センサ(軸重センサ)54A〜54Dは、車両10の4輪にそれぞれ設けられ、各車輪の軸重を検出する軸重検出手段として機能するものである。荷重センサ54Aは、左前輪の軸重を検出し、荷重センサ54Bは、右前輪の軸重を検出し、荷重センサ54Cは、左後輪の軸重を検出し、荷重センサ54Dは、右後輪の軸重を検出する。検出された軸重に関する情報は、ECU40に出力される。
【0039】
ECU40は、演算処理を行うCPU、記憶部となるROM及びRAM、入力信号回路、出力信号回路、電源回路などにより構成されている。ECU40では、記憶部に記憶されたプログラムを実行することで、直進制動判定部42、左右軸重差算出部44、及び制御部46が構築されている。
【0040】
直進制動判定部42は、車両10が直進走行中に制動操作された状態である直進制動状態であるか否かを判定する本発明の直進制動判定手段として機能するものである。直進制動判定部42は、車輪速センサ32によって検出された自車速、ステアリングセンサ32によって検出された操舵方向及び操舵量、ブレーキスイッチ36によって検出されたブレーキペダル操作に基づいて、車両10が直進走行中に制動操作された直進制動状態であるか否かを判定する。
【0041】
軸重差算出部44は、荷重センサ54A〜54Dから出力された軸重に関する情報に基づいて、各車輪に作用する軸重を算出し、左右輪の軸重の差である左右軸重差(車両10の左右方向の重量配分)、前後輪の軸重の差である前後軸重差(車両10の前後方向の重量配分)を算出する。これらの左右軸重差、前後軸重差は、例えば、乗員の着座位置や荷物の積載位置等により生じる。なお、左右軸重差は、左前輪の軸重と右前輪の軸重との差、左後輪の軸重と右後輪の軸との差、又はこれらの軸重の差の平均であってもよい。また、軸重差算出部44は、左右前輪の軸重(Fr軸重)と左右後輪の軸重(Rr軸重)とを比較して、Fr軸の重量配分(Fr軸重の割合)を算出する。
【0042】
制御部46は、直進制動状態であると判定された場合に、左右軸重差を減少させる軸重制御を実行する。制御部46は、軸重差算出部44によって算出された左右軸重差を減少させるべく、各燃料室70A〜70D間の燃料を移動させる。
【0043】
また、制御部46は、車両10の前後方向の重量配分を変更する前後配分変更制御を実行する。制御部46は、軸重差算出部44によって算出されたFr軸重の重量配分を減少させるべく、各燃料室70A〜70D間の燃料を移動させる。
【0044】
制御部46では、燃料移送ポンプ74A〜74Dの駆動、開閉バルブ75A〜75Dの開閉を制御して、適宜燃料の移動及び遮断を行うことで、車両10の左右軸重差の補正を行うと共に、車両10の前後方向の重量配分を考慮して、残り荷重を増加させるべく、後方への荷重移動を行う。
【0045】
基本的に、前輪側の荷重配分(Fr荷重配分)が小さい方が制動時における車両安定性が向上するため後方側に配置された燃料室70C,70Dに燃料を移動する。また、燃料室70C,70Dから溢れる分の燃料は、荷重センサ54A〜54Dからの情報に基づいて、軸重が軽い側の燃料室70A,70B(例えば、左側の軸重が軽い場合には、燃料室70A)へ移送される。さらに、燃料が溢れる場合には、残りの燃料室70A,70B(例えば、左側の軸重が軽い場合には、燃料室70B)へ移動する。
【0046】
また、後方側に配置された燃料室70C,70Dの両方に燃料が満たない場合には、荷重センサ54A〜54Dから情報に基づいて、軸重が軽い側の燃料室70C,70D(例えば、左側の軸重が軽い場合には、燃料室70C)へ燃料が優先的に充填される。
【0047】
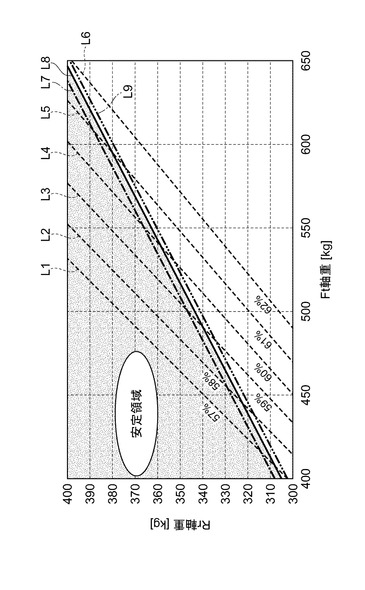
図3は、Fr軸重、Rr軸重、及び車両安定化領域の関係を示すグラフである。図3では、横軸にFr軸重(kg)を示し、縦軸にRr軸重(Kg)を示している。また、破線で示すL1〜L6は、Fr荷重配分を示している。ここでは、Fr荷重配分を57%〜62%まで、1%毎(L1〜L6)に示している。また、1点鎖線で示すL7は、左右軸重差が10kgの場合、実線で示すL8は、左右軸重差が15kgの場合、2点鎖線で示すL9は、左右軸重差が20kgの場合について示している。
【0048】
制御部46では、例えば、図3に示すグラフを参照して、Fr荷重配分が低下するように、左右軸重差が減少するように、燃料室70A〜70Dの燃料を移送して、制動時におる車両安定性を向上させる。なお、図3では、図示右上に行くほど、車両安定性が向上することを意味する。
【0049】
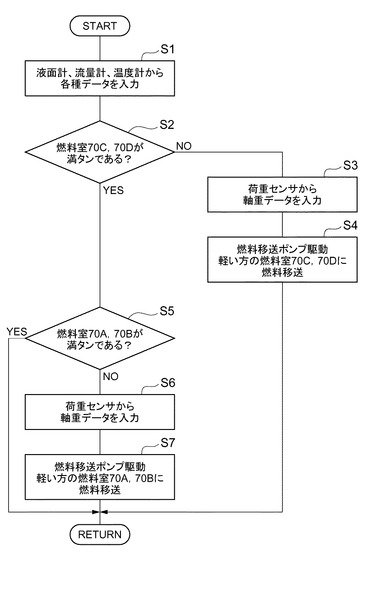
次に、このように構成された車両制御装置30の動作内容について図4のフローチャートに沿って説明する。図4は、本発明の第1実施形態に係るECUで実行される制御の処理手順を示すフローチャートである。図4に示す制御処理は、ECU40の電源がオンされてからオフされるまでの間、所定のタイミングで繰り返し実行される。
【0050】
液面計71A〜71Dは、燃料室70A〜70Dの液面に関するデータをECU40に出力する。流量計76A〜76Dは、配管73A〜73Dを流通する流量に関するデータをECU40に出力する。温度計72は、燃料の温度に関するデータをECU40に出力する。
【0051】
まず、ECU40は、液面計71A〜71D、流量計76A〜76D、温度計72から各種データを入力し、燃料室70A〜70Dの液面、配管内を移動する流量、燃料の温度等を検出する(S1)。
【0052】
次に、ECU40は、液面計71C,71Dからの液面データに基づいて、燃料室70C,70Dが満タンであるか否かを判定する。燃料室70C,70Dが満タンではない場合には、ステップ3に進み、燃料室70C,70Dが満タンであると判定された場合には、ステップ5に進む。
【0053】
ステップ3では、ECU40は、荷重センサ54A〜54Dから軸重データを入力する。続く、ステップ4では、ECU40は、必要に応じて開閉バルブ75A〜75Dを開として、燃料移送ポンプ74A〜74Dを駆動し、左右軸重差に基づいて、軽い側の燃料室70C,70Dに燃料を移送し、処理を終了する。
【0054】
ステップ5では、ECU40は、液面計71A,71Bからの液面データに基づいて、燃料室70A,70Bが満タンであるか否かを判定する。燃料室70A,70Bが満タンではない場合には、ステップ6に進み、燃料室70A,70Bが満タンであると判定された場合には、処理を終了する。
【0055】
ステップ6では、ECU40は、荷重センサ54A〜54Dから軸重データを入力する。続く、ステップ5では、ECU40は、必要に応じて開閉バルブ75A〜75Dを開として、燃料移送ポンプ74A〜74Dを駆動し、左右軸重差に基づいて、軽い側の燃料室70A,70Bに燃料を移送し、処理を終了する。そして、燃料移送後、又は燃料の移送の必要がない場合は、ECU40は、開閉バルブを閉として、燃料の移動を遮断する。
【0056】
このような車両制御装置30によれば、複数の燃料室70A〜70Dを備え、互いの燃料室70A〜70D間で燃料の移動及び隔離が可能な構成であるため、左右軸重差に基づいて、燃料室70A〜70D間で燃料を移動させことができる。これにより、車両10の左右方向の重量バランスが補正され、制動偏向が改善される。その結果、直進制動時の車両安定性能の向上が図られている。
【0057】
また、車両制御部30によれば、軸重に基づいて、Fr重量配分が減少するように、後方側の燃料室70C,70Dに優先的に燃料が移送されるため、Rr残り荷重が増加され、制動偏向が一層低減される。
【0058】
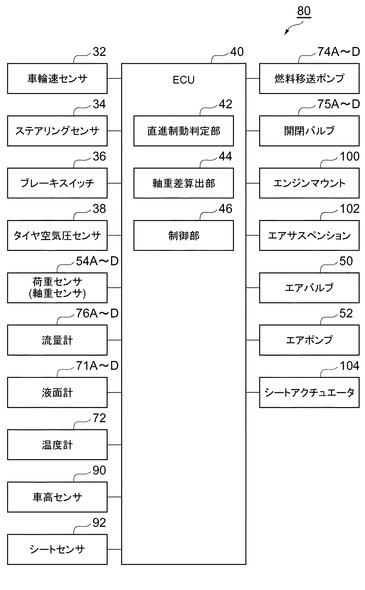
次に、本発明の第2実施形態に係る車両制御装置について図面を参照して説明する。図5は、本発明の第2実施形態に係る車両制御装置を示すブロック構成図である。第2実施形態の車両制御装置80が第1実施形態の車両制御装置30と違う点は、左右軸重差を減少させる軸重制御、車両の前後方向の重量配分を変更する前後配分変更制御に加えて、重心高さを低下させる重心高さ制御を実行する点である。また、第2実施形態の車両制御装置80では、第1実施形態とは異なる前後配分変更制御を実行する点である。なお、図7において第1実施形態と同一または相当要素には同一の符号を付し、重複する説明は省略する。
【0059】
図5に示すように、第2実施形態の車両制御装置80では、車両10の4輪にそれぞれ設けられ、タイヤ20,28の空気圧を検出するタイヤ空気圧センサ38、例えばレーザー等を利用して車両10の車高を検出する車高センサ90、助手席及び後部座席に各々設けられ、各座席(シート)が使用中であるか否かを検出するシートセンサ92を備えている。シートセンサ92では、例えば、座席の重量を測定することにより、使用中であるか否かを検出する。これらのタイヤ空気圧センサ38、車高センサ90、シートセンサ92は、ECU40と電気的に接続され、検出したデータに関する信号をECU40に出力する。
【0060】
また、車両制御装置80では、エアバルブ50、エアポンプ52、エンジンマウント100、エアサスペンション102、及びシートアクチュエータ102を備え、これらのエアバルブ50、エアポンプ52、エンジンマウント100、エアサスペンション102、及びシートアクチュエータ102は、ECU40と電気的に接続されている。
【0061】
エアバルブ50は、車両10の4輪にそれぞれ設けられ、ECU40からの指令信号に基づいて、バルブ開閉動作を行い、タイヤ20,28内の空気をタイヤ20,28外に排出し、タイヤ空気圧を低下させる。エアバルブ50は、タイヤ20,28が取り付けられたホイールのリム部(不図示)に設けられた開口部(空気排出口)接続され、タイヤ20,28内の空気を外部に排出可能とするものである。例えば、エアバルブ50は、ECU40からの指令信号を受信可能なアンテナ及び、アンテナで受信した信号を受信処理する受信部、受信部によって処理された情報に基づいて、バルブの開閉操作を行う駆動部を有し、ECU40からの指令信号に従い、バルブ開放を行い、タイヤ空気圧を低下させる。なお、エアバルブは、タイヤ20,28に直接取り付けられて、タイヤ内の空気を排出する構成としてもよい。
【0062】
そして、ECU40及びエアバルブ50は、タイヤ空気圧を低下させる本発明のタイヤ空気圧制御手段として機能するものである。このタイヤ空気圧制御手段では、例えば、制動状態(直進制動状態)である場合に、タイヤ空気圧を低下させることで、車体の車高方向の位置を制御する。これにより、車両10の重心高さを低下させる。
【0063】
エアポンプ52は、ECU40からの指令信号に基づいて、駆動され、空気圧が低下されたタイヤ20,28内に空気を注入し、タイヤ空気圧を増加させる。なお、エアポンプ52は、4輪にそれぞれ設けてもよく、共通のエアポンプ52を設けてもよい。エアポンプ52は、例えば、可動継手(スイベルジョイント)、流量制御弁等を有する配管系を用いて、ホイールのリムに設けられた開口部(空気注入口)に接続され、タイヤ20,28内に空気を注入可能とされている。この配管系の空気注入口に接続された端部は、可動継手によって、ホイールと共に回転可能な構成とされている。なお、空気注入用の開口部を、タイヤに設けてもよい。
【0064】
また、エアポンプ52は、大気中からタイヤ注入用空気を取得してもよく、タイヤ注入用空気を貯留するタンクを設置し、このタンクに貯留された空気をタイヤ内に注入してもよい。また、タイヤ空気圧を低下させるために、排出された空気をタンクに回収して、回収された空気を再利用する構成としてもよい。
【0065】
エンジンマウント100は、車両10のエンジンを下方から支持するものであり、エンジンは、エンジンマウント100を介して車体に固定されている。エンジンマウント100は、液密構造(例えば、液封マウント、油圧シリンダ)を有し、ECU40からの指令信号に従い、油圧を制御することで、エンジンの高さ位置を変更する。
【0066】
そして、ECU40及びエンジンマウント100は、エンジンの車高方向の位置を制御するエンジン位置制御手段として機能するものである。このエンジン位置制御手段では、例えば、制動状態(直進制動状態)である場合に、液封マウントに充填されている油をブレーキシリンダに注入することで、エンジンマウント100をつぶして、エンジンの高さ位置を低下させる。これにより、車両10の重心高さを低下させる。
【0067】
エアサスペンション102は、圧縮空気が封入された空気ばねを有する懸架装置である。この空気ばねは、ECU40からの指令信号に従い空気圧を制御する。そして、ECU40及びエンジンマウント100は、車体の車高方向の位置を制御する本発明の車体位置制御手段として機能する。この車体位置制御手段では、例えば、制動状態(直進制動状態)である場合に、空気ばね内の空気圧を低下させて、車体の車高方向の位置を制御する。これにより、車両10の重心高さを低下させる。
【0068】
シートアクチュエータ104は、助手席及び後部座席(運転席を除く座席、以下「シート」という。)に各々設けられ、シートを前後方向にスライドさせるスライドモータと、シートの背もたれの傾斜を変更するリクライニングモータとを有している。スライドモータ及びリクライニングモータは、ECU40からの指令信号に従い駆動され、シート位置、背もたれの傾斜を制御する。
【0069】
そして、ECU40及びスライドモータは、シートを前後方向に移動させる本発明の座席駆動手段として機能する。この座席駆動手段では、例えば、シートが使用されていない場合(乗員や荷物が無い場合)に、シートを後方へスライドさせて最後部位置に移動させることで、車両の前後方向の重量配分を変更する。これにより、Fr重量配分を低下させる。
【0070】
また、ECU40及びリクライニングモータは、シートの背もたれを後方へ傾斜させる本発明の背もたれ駆動手段として機能する。この背もたれ駆動手段では、例えば、シートが使用されていない場合に、シートを後方へ傾けることで、車両の前後方向の重量配分を変更して、Fr重量配分を低下させる。
【0071】
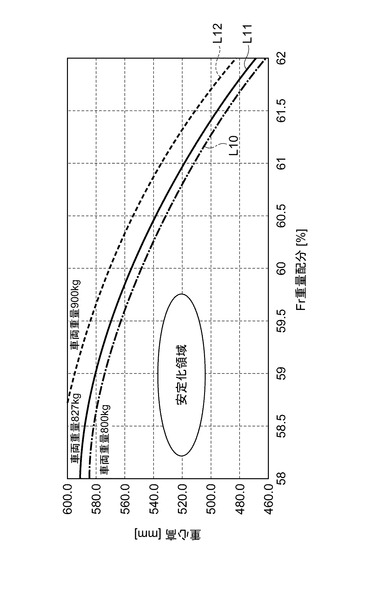
図6は、Fr重量配分、重心高さ、及び車両安定化領域の関係を示すグラフである。図6では、公称ヨーレート2deg/sのFr重量配分(%、横軸)と重心高さ(mm、縦軸)との関係を示している。一点鎖線で示すL10は、車両重量が800kgの場合、実線で示すL11は、車両重量が827kgの場合、破線で示すL12は、車両重量が900kgの場合を示している。ここでは、P/F−FS車のリアボデー剛性相当を前提条件としている。そして、Fr重量配分を低下させ、重心高さを低下させることで、制動状態における車両安定化を図ることができる。
【0072】
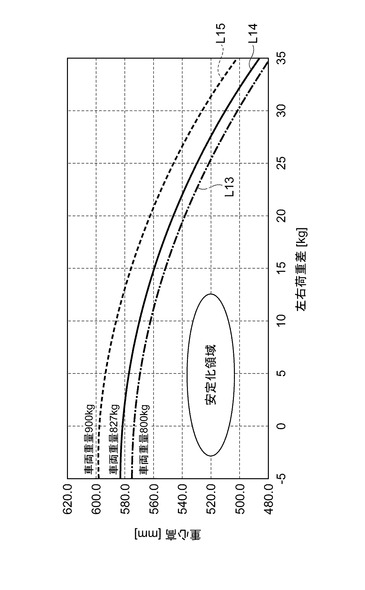
図7は、左右軸重差、重心高さ、及び車両安定化領域の関係を示すグラフである。図7では、公称ヨーレート2deg/sの左右軸重差(kg、横軸)と重心高さ(mm、縦軸)との関係を示している。一点鎖線で示すL13は、車両重量が800kgの場合、実線で示すL14は、車両重量が827kgの場合、破線で示すL15は、車両重量が900kgの場合を示している。ここでは、P/F−FS車のリアボデー剛性相当を前提条件としている。そして、左右荷重差を低下させ、重心高さを低下させることで、制動状態における車両安定化を図ることができる。
【0073】
そして、ECU40では、各種センサからのデータ、記憶部に記憶されたデータ(マップ)等に基づいて、前後荷重の適正化、左右軸重差の適正化、重心高さの低減を行い、車両を安定化させる。
【0074】
このような車両制御装置80によれば、第1実施形態の車両制御装置30と同様に燃料の移動を行うことで、左右軸重差を減少させる軸重制御を実行すると共に、前後方向の重量配分を変更する重量配分変更制御を実行し、直進制動状態における車両安定性を向上させ、制動偏向を抑制する。
【0075】
また、車両制御装置80では、エンジンマウント100を用いたエンジン位置の低下、エアサスペンション102を用いた車体位置の低下、エアバルブ50を用いたタイヤ空気圧の低下を行うことで、タイヤ接地面から車両10の重心までの高さである重心高さを低下させる重心高さ制御を実行し、直進制動状態における車両安定性を向上させ、制動偏向を抑制する。
【0076】
また、直進制動状態において、タイヤ空気圧を低下させることで、タイヤCP荷重変動率を低下させて、制動偏向を抑制することができる。
【0077】
また、車両制御装置80では、シートアクチュエータ104を用いて、Fr重量配分の低下を行うことで、車両の前後方向の重量配分を変更する前後配分変更制御を実行し、直進制動状態における車両安定性を向上させ、制動偏向を抑制する。
【0078】
以上、本発明のその実施形態に基づき具体的に説明したが、本発明は、上記実施形態に限定されるものではない。上記実施形態において、燃料タンクの燃料を、複数の燃料室間で移動させることで、左右軸重差を減少させる制御、Fr重量配分を低下させる制御を実行しているが、車両内のその他の物体(液体)を移動させることで、左右軸重差の減少、Fr重量配分の低下を行ってもよい。例えば、エンジンマウントを用いて、エンジンの位置調整を行って、左右軸重差、Fr重量配分の低下を行ってもよい。
【0079】
また、上記実施形態では、直進制動状態である場合に、軸重制御、重心高さ制御、前後配分変更制御を実行しているが、その他の制動状態や、走行状態に応じて、軸重制御、重心高さ制御、前後配分変更制御を実行してもよい。また、例えば、ブレーキ操作を予想して、予め、軸重制御、重心高さ制御、前後配分変更制御を実行してもよい。
【0080】
また、上記実施形態では、ステアリングセンサ、ブレーキスイッチからの信号に基づいて、直進制動状態であるか否かを判定しているが、例えば、操舵トルクセンサ、操舵角センサ、操舵ECU、ブレーキECUを始めとしたその他のセンサ、スイッチ、ECUからの信号に基づいて、直進制動状態であるか否かを判定してもよい。また、直進制動状態以外の制動状態において、空気圧を低下させてもよい。
【図面の簡単な説明】
【0081】
【図1】本発明の第1実施形態に係る車両制御装置を搭載した車両の概略構成図である。
【図2】本発明の第1実施形態に係る車両制御装置を示すブロック構成図である。
【図3】Fr軸重、Rr軸重、及び車両安定化領域の関係を示すグラフである。
【図4】本発明の第1実施形態に係るECUで実行される制御の処理手順を示すフローチャートである。
【図5】本発明の第2実施形態に係る車両制御装置を示すブロック構成図である。
【図6】Fr重量配分、重心高さ、及び車両安定化領域の関係を示すグラフである。
【図7】左右軸重差、重心高さ、及び車両安定化領域の関係を示すグラフである。
【図8】直進制動時における車両の偏向状態を示す平面図である。
【図9】制動偏向の要因を示す図である。
【図10】車両感度の要因を示す図である。
【図11】左右軸重差がある場合に車両に作用する強制力を示す概略図である。
【図12】左右制動力差がある場合に車両に作用する強制力を示す概略図である。
【図13】横力がある場合に車両に作用する強制力を示す概略図である。
【符号の説明】
【0082】
10…車両、30,80…車両制御装置、40…ECU(制御手段)、42…直進制動判定部、44…軸重差制御部、46…制御部、50…エアバルブ、54A〜D…荷重センサ、70…燃料タンク、70A〜D…燃料室、74A〜D…燃料移送ポンプ、100…エンジンマウント、102…エアサスペンション、104…シートアクチュエータ。
【技術分野】
【0001】
本発明は、直進制動状態における車両を制御する車両制御装置に関するものである。
【背景技術】
【0002】
従来、制動時における車両を制御する技術として、特許文献1,2に記載のものがある。特許文献1に記載のタイヤ空気圧制御装置では、運転者の操舵以外の要因により車両の重心回りに回転モーメントが発生した結果、車両が緩やかに旋回してしまう偏向状態を検出し、左右のタイヤの空気圧の比率を変更することにより、車両の重心回りに偏向状態を消滅させる方向の回転モーメントを発生させて、車両の偏向状態の低減を図っている。
【0003】
また、特許文献2に記載の制動力配分制御方向では、直進制動状態において、左側の前輪と後輪との制動力の和と右側の前輪と後輪との制動力の和とが均等になるように各車輪に制動力を配分することで、左右制動力差によるヨーモーメントの発生を回避しようとしている。
【特許文献1】特開2006−62381号公報
【特許文献2】特開平5−262213号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
図8は、直進制動時における車両の偏向状態を示す平面図である。図8に示すように、車両1が例えば高速走行している場合に、運転者が制動操作を行うと、車両1の重心回りに回転モーメントが発生し、車両1が緩やかに旋回する偏向が発生して、制動時の車両1の安定性が低下するおそれがある。例えば、図8に示す車両の偏向状態では、制動操作開始後2.0〜2.5秒で、車速が制動開始から半減し、車両1は、道路2の幅方向に2〜4mずれてしまっている。
【0005】
車両の偏向状態は、制動をきっかけとし、その要因は、強制力と車両感度とに関係している。なお、以下の説明において、制動をきっかけとして発生する偏向を「制動偏向」という。図9は、制動偏向の要因を示す図である。図9に示すように、車両の制動偏向は、様々な要因より発生する。なお、以下の説明において、タイヤのコーナリングパワーを「CP」と記し、前輪のコーナリングパワーを「フロントCP」、後輪のコーナリングパワーを「リアCP」と記す。図9に示す制動偏向の要因としては、主に車両感度と強制力が挙げられる。また、車両感度に影響を与える要因として、制動時のリアタイヤのグリップ力が小さいこと、制動時のフロントグリップ力が大きいこと等が挙げられ、強制力に影響を与える要因として、横力、ヨーモーメントが挙げられる。
【0006】
図10は、車両感度の要因を示す図である。図10では、各要因(例えば、質量、重心高、タイヤCp荷重依存性等)の変化割合に対する車両感度への影響の大きさについて、棒グラフで示し、棒グラフが、右側に伸びるほど車両感度が改善され、左側に伸びるほど車両感度が悪化することを表現している。例えば、質量が増加した場合には車両感度が改善され、重心高さが増加した場合には車両感度が悪化する。また、左右軸重差(左右前輪の軸重の差、Fr重量配分比)が増加した場合には車両感度が悪化する。換言すれば、左右軸重差を減少すると、車両感動を改善することができる。
【0007】
図11は、左右軸重差がある場合に車両に作用する強制力を示す概略図、図12は、左右制動力差がある場合に車両に作用する強制力を示す概略図、図13は、横力がある場合に車両に作用する強制力を示す概略図である。図11に示す車両1では、重心が左側に移動して左右軸重差が発生し、車両1を右側に偏向させる強制力が作用している。また、図12に示す車両1では、右フロントの制動力F1が左フロントの制動力F2より大きくなる左右制動力差が発生し、車両1を右側に偏向させる強制力が作用している。また、図13に示す車両1では、右方向へ移動させる横力F3が左方向へ移動させる横力F4より大きく、車両1を右側に偏向させる強制力が作用している。そして、このような制動偏向を低減し、制動時における車両安定性を向上させることが求められている。
【0008】
本発明は、このような課題を解決するために成されたものであり、制動偏向を低減し、制動時における車両安定性を向上させることが可能な車両制御装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明の車両制御装置は、車両直進中に制動操作された状態である直進制動状態における車両を制御する制御手段を備えた車両制御装置であって、制御手段は、直進制動状態である場合に、左右輪の軸重の差である左右軸重差を減少させる軸重制御を実行することを特徴としている。
【0010】
このような車両制御装置によれば、直進制動状態において、左右軸重差を減少させることができるため、車両の左右方向の重量バランスを補正して、制動偏向を低減させることができる。
【0011】
ここで、制御手段は、軸重制御として、燃料タンクの左右方向の重量配分を変更する構成が挙げられる。また、燃料タンクは、左右方向の異なる位置に設けられ、互いに連通可能且つ遮断可能とされた複数の燃料室を有し、制御手段は、軸重制御として、燃料室内の燃料を移動させて、燃料タンクの左右方向の重量配分を変更する構成が挙げられる。このように、複数の燃料室を備え、互いの燃料室間で燃料の移動及び隔離が可能な構成であるため、燃料室間で燃料を移動させて、車両の左右方向の重量バランスを補正して、制動偏向を低減させることができる。
【0012】
また、燃料タンクは、左右方向及び前後方向に対称に配置され、互いに均等である複数の燃料室を有することがより好ましい。これにより、均等である複数の燃料室が左右前後に対称に配置されているため、精度良く車両の重量バランスを補正して、制動偏向を低減させることができる。
【0013】
また、制御手段は、直進制動状態である場合に、タイヤ接地面から車両の重心までの高さである重心高さを低下させる重心高さ制御を実行することが好ましい。これにより、重心高さを低下させることで、直進制動状態における制動偏向を低減することができる。
【0014】
また、エンジンの車高方向の位置を制御するエンジン位置制御手段を更に備え、制御手段は、重心高さ制御として、エンジン位置制御手段を用いてエンジンの車高方向の位置を低下させる構成が挙げられる。これにより、エンジン位置を低下させて、車両の重心高さを低下させることができる。
【0015】
また、エンジン位置制御手段は、液密構造を有し、エンジンを下方から支持するエンジンマウントを有し、制御手段は、重心高さ制御として、エンジンマウント内の液体をエンジンマウント外に移動させて、エンジンの位置を低下させてもよい。
【0016】
また、車体の車高方向の位置を制御する車体位置制御手段を更に備え、制御手段は、重心高さ制御として、車体位置制御手段を用いて車体の車高方向の位置を低下させる構成が挙げられる。
【0017】
また、車体位置制御手段は、圧縮空気が封入された空気ばねを有するエアサスペンションを備え、制御手段は、重心高さ制御として、エアサスペンションを用いて車体の車高方向の位置を低下させることが好ましい。なお、エアサスペンションは、圧縮空気に代えてその他のガス(例えば、不活性ガス、窒素ガス等)が封入されたガスばねを有するものを含むものとする。
【0018】
また、車体位置制御手段は、タイヤ空気圧を低下させるタイヤ空気圧制御手段を有し、制御手段は、重心高さ制御として、タイヤ空気圧制御手段を用いてタイヤ圧を低下させ、車体の車高方向の位置を低下させることが好ましい。なお、タイヤ空気圧制御手段は、タイヤ内の圧力を低下させるものを含み、タイヤ内に空気以外の流体(例えば、不活性ガス、窒素ガス)が充填されている場合には、タイヤ内のその他の流体の圧力を低下させるものを含んでいる。
【0019】
また、制御手段は、車両の前後方向の重量配分を変更する前後配分変更制御を実行してもよい。これにより、車両の前後方向の重量配分を変更することができるため、車両の重心を後方に移動させて、直進制動状態における制動偏向を抑制することができる。
【0020】
また、制御手段は、前後配分変更制御として、直進制動状態である場合に、燃料タンクの前後方向の重量配分を変更する構成が挙げられる。これにより、直進制動状態において、燃料タンクの前後方向の重量配分を変更して、リア残り荷重を増加させることで、制動偏向を抑制して車両安定性を向上させることができる。
【0021】
また、座席を前後方向に移動させる座席駆動手段を更に備え、制御手段は、前後配分変更制御として、座席が使用されていない場合に、座席駆動手段によって、座席を後方へ移動させることが好ましい。また、座席の背もたれを後方へ傾斜させる背もたれ駆動手段を更に備え、制御手段は、前後配分変更制御として、座席が使用されていない場合に、背もたれ駆動手段によって、背もたれを後方へ傾斜させることが好ましい。これにより、座席が使用されていない場合に、座席を後方へ移動させること、背もたれを後方に傾斜させることにより、好適に車両の重心を後方へ移動させることができる。
【0022】
また、左右輪の軸重を検出する複数の軸重検出手段を更に備え、制御手段は、軸重検出手段によって検出された軸重に基づいて、左右軸重差を算出することが好ましい。
【発明の効果】
【0023】
本発明の車両制御装置によれば、制動偏向を低減し、制動時における車両安定性を向上させることができる。
【発明を実施するための最良の形態】
【0024】
以下、本発明による車両制御装置の好適な実施形態について図面を参照して説明する。なお、図面の説明において同一または相当要素には同一の符号を付し、重複する説明は省略する。図1は、本発明の第1実施形態に係る車両制御装置を搭載した車両の概略構成図、図2は、本発明の第1実施形態に係る車両制御装置を示すブロック構成図である。
【0025】
図1に示す車両10は、車両10の操舵を行う操舵装置を備え、この操舵装置は、運転者によって回動操作されるステアリングホイール14、このステアリングホイール14の回動を伝達するステアリングシャフト16、このステアリングシャフト16の回動を直線運動に変換する例えばラックアンドピニオン式ステアリングギアボックス18、及びこのステアリングギアボックス18により変換された直線運動をフロントタイヤ20に伝達するサイドロッド22を備えている。そして、操舵装置は、ステアリングホイール14の回動に応じてフロントタイヤ20を転舵する。
【0026】
また、車両10は、車両10の制動を行う制動装置を備え、この制動装置は、運転者によって押圧操作されるブレーキペダル26と、ブレーキペダル26による操作に応じてフロントタイヤ20、リアタイヤ28に制動力を付与するブレーキアクチュエータと、このブレーキアクチュエータによる制動力を制御するブレーキECUとを備えている。そして、制動装置は、ブレーキペダル26の踏み込み量に応じて、フロントタイヤ20及びリアタイヤ28に制動力を発生させる。
【0027】
また、車両10の燃料を貯留する燃料タンク70は、複数の(本実施形態では4つ)の燃料室70A〜70Dを有している。これらの燃料室70A〜70Dは、車両10の左右方向及び前後方向に対称に配置され、互いに均等に構成され、燃料室70Aは、左側前部、燃料室70Bは、右側前部、燃料室70Cは、左側後部、燃料室70Dは、右側後部に、各々配置されている。
【0028】
なお、これらの燃料室70A〜70Dには、燃料室内の液面を計測する液面計71A〜71D、燃料の温度を計測する温度計72を各々備える構成としてもよい。これらの液面計71A〜71D及び温度計72は、計測したデータを後述するECU40に出力し、ECU40は、これらのデータに基づいて、各燃料室70A〜70Dの燃料質量を精度よく検出することができる。
【0029】
また、各燃料室70A〜70Dは、配管73A〜73Dによって互いに連結され、各燃料室70A〜70D間で、燃料の移動及び、遮断が可能な構成とされている。具体的には、燃料室70A,70Bを連通する配管73A、燃料室70B,70Cを連通する配管73B、燃料室70C,70Dを連通する配管73C、燃料室70C,70Dを連通する配管73Dを有している。
【0030】
これらの配管73A〜73Dには、燃料室70A〜70D間の燃料の移動を可能とする燃料移送ポンプ74A〜74Dが各々設置されている。また、これらの配管73A〜73Dには、各燃料室70A〜70D間の燃料の移動を遮断する開閉バルブ75A〜75Dが各々設置されている。
【0031】
燃料移送ポンプ74A〜74Dは、ECU40からの駆動信号に基づいて作動し正逆回転可能であり、一方の燃料室から他方の燃料室への燃料の移送を可能とすると共に、他方の燃料室から一方の燃料室への燃料の移送を可能とする。
【0032】
開閉バルブ75A〜75Dは、ECU40からの駆動信号に基づいて開閉可能であり、燃料移送時において、開状態とされ、燃料移送終了後に閉状態とされ、燃料の移動を遮断する。
【0033】
また、これらの配管73A〜73Dに流量計76A〜76Dを設け、各燃料室70A〜70D間を移動する燃料の流量(体積流量)を計測し、そのデータをECU40に出力する構成としてもよい。
【0034】
ここで、本発明の実施形態に係る車両制御装置30は、車両10に搭載され、直進制動時の車両10の安定性能を向上させるものである。具体的には、直進制動時において、各燃料室70A〜70Dの燃料を移送して、車両10の重量バランスを補正して、制動偏向を抑制するものである。図2に示すように、車両制御装置30は、車輪速センサ32、ステアリングセンサ34、ブレーキスイッチ36、タイヤ空気圧センサ38、ECU(電子制御ユニット)40、荷重センサ54A〜54D、液面計71、温度計72、燃料移送ポンプ74A〜74D、開閉バルブ75A〜75D、流量計76A〜76Dを備えている。そして、ECU40は、車輪速センサ32、ステアリングセンサ34、ブレーキスイッチ36、荷重センサ54A〜54D、液面計71、温度計72、燃料移送ポンプ74A〜74D、開閉バルブ75A〜75D、及び流量計76A〜76Dと電気的に接続されている。
【0035】
車輪速センサ32は、車両10の4輪にそれぞれ設けられ、車輪の回転速度(車輪の回転に応じたパルス数)を検出するセンサである。車輪速センサ32では、所定時間毎の車輪の回転パルス数を検出し、その検出した車輪回転パルス数をECU40に出力する。ECU40では、各車輪の回転速度から車輪速をそれぞれ算出し、各輪の車輪速から車体速(車速)を算出する。
【0036】
ステアリングセンサ34は、ステアリング操作(操舵操作)を検出する本発明の操舵操作検出手段として機能するものであり、例えばコンビネーションスイッチ部に設けられ、ステアリングホイール14の回転を検出して、操舵方向及び操舵量を検出する。そして、ステアリングセンサ34は、操舵方向および操舵量に関する情報をECU40に出力する。
【0037】
ブレーキスイッチ36は、ブレーキ操作(制動操作)を検出する本発明の制動操作検出手段として機能するものであり、例えばブレーキペダル26に取り付けられ、運転者によるブレーキペダル操作を検出する。そして、ブレーキスイッチ36は、運転者がブレーキペダル26を操作して車両10を制動させようとした際に、ブレーキ操作を検出したことを示す検出信号をECU40に出力する。
【0038】
荷重センサ(軸重センサ)54A〜54Dは、車両10の4輪にそれぞれ設けられ、各車輪の軸重を検出する軸重検出手段として機能するものである。荷重センサ54Aは、左前輪の軸重を検出し、荷重センサ54Bは、右前輪の軸重を検出し、荷重センサ54Cは、左後輪の軸重を検出し、荷重センサ54Dは、右後輪の軸重を検出する。検出された軸重に関する情報は、ECU40に出力される。
【0039】
ECU40は、演算処理を行うCPU、記憶部となるROM及びRAM、入力信号回路、出力信号回路、電源回路などにより構成されている。ECU40では、記憶部に記憶されたプログラムを実行することで、直進制動判定部42、左右軸重差算出部44、及び制御部46が構築されている。
【0040】
直進制動判定部42は、車両10が直進走行中に制動操作された状態である直進制動状態であるか否かを判定する本発明の直進制動判定手段として機能するものである。直進制動判定部42は、車輪速センサ32によって検出された自車速、ステアリングセンサ32によって検出された操舵方向及び操舵量、ブレーキスイッチ36によって検出されたブレーキペダル操作に基づいて、車両10が直進走行中に制動操作された直進制動状態であるか否かを判定する。
【0041】
軸重差算出部44は、荷重センサ54A〜54Dから出力された軸重に関する情報に基づいて、各車輪に作用する軸重を算出し、左右輪の軸重の差である左右軸重差(車両10の左右方向の重量配分)、前後輪の軸重の差である前後軸重差(車両10の前後方向の重量配分)を算出する。これらの左右軸重差、前後軸重差は、例えば、乗員の着座位置や荷物の積載位置等により生じる。なお、左右軸重差は、左前輪の軸重と右前輪の軸重との差、左後輪の軸重と右後輪の軸との差、又はこれらの軸重の差の平均であってもよい。また、軸重差算出部44は、左右前輪の軸重(Fr軸重)と左右後輪の軸重(Rr軸重)とを比較して、Fr軸の重量配分(Fr軸重の割合)を算出する。
【0042】
制御部46は、直進制動状態であると判定された場合に、左右軸重差を減少させる軸重制御を実行する。制御部46は、軸重差算出部44によって算出された左右軸重差を減少させるべく、各燃料室70A〜70D間の燃料を移動させる。
【0043】
また、制御部46は、車両10の前後方向の重量配分を変更する前後配分変更制御を実行する。制御部46は、軸重差算出部44によって算出されたFr軸重の重量配分を減少させるべく、各燃料室70A〜70D間の燃料を移動させる。
【0044】
制御部46では、燃料移送ポンプ74A〜74Dの駆動、開閉バルブ75A〜75Dの開閉を制御して、適宜燃料の移動及び遮断を行うことで、車両10の左右軸重差の補正を行うと共に、車両10の前後方向の重量配分を考慮して、残り荷重を増加させるべく、後方への荷重移動を行う。
【0045】
基本的に、前輪側の荷重配分(Fr荷重配分)が小さい方が制動時における車両安定性が向上するため後方側に配置された燃料室70C,70Dに燃料を移動する。また、燃料室70C,70Dから溢れる分の燃料は、荷重センサ54A〜54Dからの情報に基づいて、軸重が軽い側の燃料室70A,70B(例えば、左側の軸重が軽い場合には、燃料室70A)へ移送される。さらに、燃料が溢れる場合には、残りの燃料室70A,70B(例えば、左側の軸重が軽い場合には、燃料室70B)へ移動する。
【0046】
また、後方側に配置された燃料室70C,70Dの両方に燃料が満たない場合には、荷重センサ54A〜54Dから情報に基づいて、軸重が軽い側の燃料室70C,70D(例えば、左側の軸重が軽い場合には、燃料室70C)へ燃料が優先的に充填される。
【0047】
図3は、Fr軸重、Rr軸重、及び車両安定化領域の関係を示すグラフである。図3では、横軸にFr軸重(kg)を示し、縦軸にRr軸重(Kg)を示している。また、破線で示すL1〜L6は、Fr荷重配分を示している。ここでは、Fr荷重配分を57%〜62%まで、1%毎(L1〜L6)に示している。また、1点鎖線で示すL7は、左右軸重差が10kgの場合、実線で示すL8は、左右軸重差が15kgの場合、2点鎖線で示すL9は、左右軸重差が20kgの場合について示している。
【0048】
制御部46では、例えば、図3に示すグラフを参照して、Fr荷重配分が低下するように、左右軸重差が減少するように、燃料室70A〜70Dの燃料を移送して、制動時におる車両安定性を向上させる。なお、図3では、図示右上に行くほど、車両安定性が向上することを意味する。
【0049】
次に、このように構成された車両制御装置30の動作内容について図4のフローチャートに沿って説明する。図4は、本発明の第1実施形態に係るECUで実行される制御の処理手順を示すフローチャートである。図4に示す制御処理は、ECU40の電源がオンされてからオフされるまでの間、所定のタイミングで繰り返し実行される。
【0050】
液面計71A〜71Dは、燃料室70A〜70Dの液面に関するデータをECU40に出力する。流量計76A〜76Dは、配管73A〜73Dを流通する流量に関するデータをECU40に出力する。温度計72は、燃料の温度に関するデータをECU40に出力する。
【0051】
まず、ECU40は、液面計71A〜71D、流量計76A〜76D、温度計72から各種データを入力し、燃料室70A〜70Dの液面、配管内を移動する流量、燃料の温度等を検出する(S1)。
【0052】
次に、ECU40は、液面計71C,71Dからの液面データに基づいて、燃料室70C,70Dが満タンであるか否かを判定する。燃料室70C,70Dが満タンではない場合には、ステップ3に進み、燃料室70C,70Dが満タンであると判定された場合には、ステップ5に進む。
【0053】
ステップ3では、ECU40は、荷重センサ54A〜54Dから軸重データを入力する。続く、ステップ4では、ECU40は、必要に応じて開閉バルブ75A〜75Dを開として、燃料移送ポンプ74A〜74Dを駆動し、左右軸重差に基づいて、軽い側の燃料室70C,70Dに燃料を移送し、処理を終了する。
【0054】
ステップ5では、ECU40は、液面計71A,71Bからの液面データに基づいて、燃料室70A,70Bが満タンであるか否かを判定する。燃料室70A,70Bが満タンではない場合には、ステップ6に進み、燃料室70A,70Bが満タンであると判定された場合には、処理を終了する。
【0055】
ステップ6では、ECU40は、荷重センサ54A〜54Dから軸重データを入力する。続く、ステップ5では、ECU40は、必要に応じて開閉バルブ75A〜75Dを開として、燃料移送ポンプ74A〜74Dを駆動し、左右軸重差に基づいて、軽い側の燃料室70A,70Bに燃料を移送し、処理を終了する。そして、燃料移送後、又は燃料の移送の必要がない場合は、ECU40は、開閉バルブを閉として、燃料の移動を遮断する。
【0056】
このような車両制御装置30によれば、複数の燃料室70A〜70Dを備え、互いの燃料室70A〜70D間で燃料の移動及び隔離が可能な構成であるため、左右軸重差に基づいて、燃料室70A〜70D間で燃料を移動させことができる。これにより、車両10の左右方向の重量バランスが補正され、制動偏向が改善される。その結果、直進制動時の車両安定性能の向上が図られている。
【0057】
また、車両制御部30によれば、軸重に基づいて、Fr重量配分が減少するように、後方側の燃料室70C,70Dに優先的に燃料が移送されるため、Rr残り荷重が増加され、制動偏向が一層低減される。
【0058】
次に、本発明の第2実施形態に係る車両制御装置について図面を参照して説明する。図5は、本発明の第2実施形態に係る車両制御装置を示すブロック構成図である。第2実施形態の車両制御装置80が第1実施形態の車両制御装置30と違う点は、左右軸重差を減少させる軸重制御、車両の前後方向の重量配分を変更する前後配分変更制御に加えて、重心高さを低下させる重心高さ制御を実行する点である。また、第2実施形態の車両制御装置80では、第1実施形態とは異なる前後配分変更制御を実行する点である。なお、図7において第1実施形態と同一または相当要素には同一の符号を付し、重複する説明は省略する。
【0059】
図5に示すように、第2実施形態の車両制御装置80では、車両10の4輪にそれぞれ設けられ、タイヤ20,28の空気圧を検出するタイヤ空気圧センサ38、例えばレーザー等を利用して車両10の車高を検出する車高センサ90、助手席及び後部座席に各々設けられ、各座席(シート)が使用中であるか否かを検出するシートセンサ92を備えている。シートセンサ92では、例えば、座席の重量を測定することにより、使用中であるか否かを検出する。これらのタイヤ空気圧センサ38、車高センサ90、シートセンサ92は、ECU40と電気的に接続され、検出したデータに関する信号をECU40に出力する。
【0060】
また、車両制御装置80では、エアバルブ50、エアポンプ52、エンジンマウント100、エアサスペンション102、及びシートアクチュエータ102を備え、これらのエアバルブ50、エアポンプ52、エンジンマウント100、エアサスペンション102、及びシートアクチュエータ102は、ECU40と電気的に接続されている。
【0061】
エアバルブ50は、車両10の4輪にそれぞれ設けられ、ECU40からの指令信号に基づいて、バルブ開閉動作を行い、タイヤ20,28内の空気をタイヤ20,28外に排出し、タイヤ空気圧を低下させる。エアバルブ50は、タイヤ20,28が取り付けられたホイールのリム部(不図示)に設けられた開口部(空気排出口)接続され、タイヤ20,28内の空気を外部に排出可能とするものである。例えば、エアバルブ50は、ECU40からの指令信号を受信可能なアンテナ及び、アンテナで受信した信号を受信処理する受信部、受信部によって処理された情報に基づいて、バルブの開閉操作を行う駆動部を有し、ECU40からの指令信号に従い、バルブ開放を行い、タイヤ空気圧を低下させる。なお、エアバルブは、タイヤ20,28に直接取り付けられて、タイヤ内の空気を排出する構成としてもよい。
【0062】
そして、ECU40及びエアバルブ50は、タイヤ空気圧を低下させる本発明のタイヤ空気圧制御手段として機能するものである。このタイヤ空気圧制御手段では、例えば、制動状態(直進制動状態)である場合に、タイヤ空気圧を低下させることで、車体の車高方向の位置を制御する。これにより、車両10の重心高さを低下させる。
【0063】
エアポンプ52は、ECU40からの指令信号に基づいて、駆動され、空気圧が低下されたタイヤ20,28内に空気を注入し、タイヤ空気圧を増加させる。なお、エアポンプ52は、4輪にそれぞれ設けてもよく、共通のエアポンプ52を設けてもよい。エアポンプ52は、例えば、可動継手(スイベルジョイント)、流量制御弁等を有する配管系を用いて、ホイールのリムに設けられた開口部(空気注入口)に接続され、タイヤ20,28内に空気を注入可能とされている。この配管系の空気注入口に接続された端部は、可動継手によって、ホイールと共に回転可能な構成とされている。なお、空気注入用の開口部を、タイヤに設けてもよい。
【0064】
また、エアポンプ52は、大気中からタイヤ注入用空気を取得してもよく、タイヤ注入用空気を貯留するタンクを設置し、このタンクに貯留された空気をタイヤ内に注入してもよい。また、タイヤ空気圧を低下させるために、排出された空気をタンクに回収して、回収された空気を再利用する構成としてもよい。
【0065】
エンジンマウント100は、車両10のエンジンを下方から支持するものであり、エンジンは、エンジンマウント100を介して車体に固定されている。エンジンマウント100は、液密構造(例えば、液封マウント、油圧シリンダ)を有し、ECU40からの指令信号に従い、油圧を制御することで、エンジンの高さ位置を変更する。
【0066】
そして、ECU40及びエンジンマウント100は、エンジンの車高方向の位置を制御するエンジン位置制御手段として機能するものである。このエンジン位置制御手段では、例えば、制動状態(直進制動状態)である場合に、液封マウントに充填されている油をブレーキシリンダに注入することで、エンジンマウント100をつぶして、エンジンの高さ位置を低下させる。これにより、車両10の重心高さを低下させる。
【0067】
エアサスペンション102は、圧縮空気が封入された空気ばねを有する懸架装置である。この空気ばねは、ECU40からの指令信号に従い空気圧を制御する。そして、ECU40及びエンジンマウント100は、車体の車高方向の位置を制御する本発明の車体位置制御手段として機能する。この車体位置制御手段では、例えば、制動状態(直進制動状態)である場合に、空気ばね内の空気圧を低下させて、車体の車高方向の位置を制御する。これにより、車両10の重心高さを低下させる。
【0068】
シートアクチュエータ104は、助手席及び後部座席(運転席を除く座席、以下「シート」という。)に各々設けられ、シートを前後方向にスライドさせるスライドモータと、シートの背もたれの傾斜を変更するリクライニングモータとを有している。スライドモータ及びリクライニングモータは、ECU40からの指令信号に従い駆動され、シート位置、背もたれの傾斜を制御する。
【0069】
そして、ECU40及びスライドモータは、シートを前後方向に移動させる本発明の座席駆動手段として機能する。この座席駆動手段では、例えば、シートが使用されていない場合(乗員や荷物が無い場合)に、シートを後方へスライドさせて最後部位置に移動させることで、車両の前後方向の重量配分を変更する。これにより、Fr重量配分を低下させる。
【0070】
また、ECU40及びリクライニングモータは、シートの背もたれを後方へ傾斜させる本発明の背もたれ駆動手段として機能する。この背もたれ駆動手段では、例えば、シートが使用されていない場合に、シートを後方へ傾けることで、車両の前後方向の重量配分を変更して、Fr重量配分を低下させる。
【0071】
図6は、Fr重量配分、重心高さ、及び車両安定化領域の関係を示すグラフである。図6では、公称ヨーレート2deg/sのFr重量配分(%、横軸)と重心高さ(mm、縦軸)との関係を示している。一点鎖線で示すL10は、車両重量が800kgの場合、実線で示すL11は、車両重量が827kgの場合、破線で示すL12は、車両重量が900kgの場合を示している。ここでは、P/F−FS車のリアボデー剛性相当を前提条件としている。そして、Fr重量配分を低下させ、重心高さを低下させることで、制動状態における車両安定化を図ることができる。
【0072】
図7は、左右軸重差、重心高さ、及び車両安定化領域の関係を示すグラフである。図7では、公称ヨーレート2deg/sの左右軸重差(kg、横軸)と重心高さ(mm、縦軸)との関係を示している。一点鎖線で示すL13は、車両重量が800kgの場合、実線で示すL14は、車両重量が827kgの場合、破線で示すL15は、車両重量が900kgの場合を示している。ここでは、P/F−FS車のリアボデー剛性相当を前提条件としている。そして、左右荷重差を低下させ、重心高さを低下させることで、制動状態における車両安定化を図ることができる。
【0073】
そして、ECU40では、各種センサからのデータ、記憶部に記憶されたデータ(マップ)等に基づいて、前後荷重の適正化、左右軸重差の適正化、重心高さの低減を行い、車両を安定化させる。
【0074】
このような車両制御装置80によれば、第1実施形態の車両制御装置30と同様に燃料の移動を行うことで、左右軸重差を減少させる軸重制御を実行すると共に、前後方向の重量配分を変更する重量配分変更制御を実行し、直進制動状態における車両安定性を向上させ、制動偏向を抑制する。
【0075】
また、車両制御装置80では、エンジンマウント100を用いたエンジン位置の低下、エアサスペンション102を用いた車体位置の低下、エアバルブ50を用いたタイヤ空気圧の低下を行うことで、タイヤ接地面から車両10の重心までの高さである重心高さを低下させる重心高さ制御を実行し、直進制動状態における車両安定性を向上させ、制動偏向を抑制する。
【0076】
また、直進制動状態において、タイヤ空気圧を低下させることで、タイヤCP荷重変動率を低下させて、制動偏向を抑制することができる。
【0077】
また、車両制御装置80では、シートアクチュエータ104を用いて、Fr重量配分の低下を行うことで、車両の前後方向の重量配分を変更する前後配分変更制御を実行し、直進制動状態における車両安定性を向上させ、制動偏向を抑制する。
【0078】
以上、本発明のその実施形態に基づき具体的に説明したが、本発明は、上記実施形態に限定されるものではない。上記実施形態において、燃料タンクの燃料を、複数の燃料室間で移動させることで、左右軸重差を減少させる制御、Fr重量配分を低下させる制御を実行しているが、車両内のその他の物体(液体)を移動させることで、左右軸重差の減少、Fr重量配分の低下を行ってもよい。例えば、エンジンマウントを用いて、エンジンの位置調整を行って、左右軸重差、Fr重量配分の低下を行ってもよい。
【0079】
また、上記実施形態では、直進制動状態である場合に、軸重制御、重心高さ制御、前後配分変更制御を実行しているが、その他の制動状態や、走行状態に応じて、軸重制御、重心高さ制御、前後配分変更制御を実行してもよい。また、例えば、ブレーキ操作を予想して、予め、軸重制御、重心高さ制御、前後配分変更制御を実行してもよい。
【0080】
また、上記実施形態では、ステアリングセンサ、ブレーキスイッチからの信号に基づいて、直進制動状態であるか否かを判定しているが、例えば、操舵トルクセンサ、操舵角センサ、操舵ECU、ブレーキECUを始めとしたその他のセンサ、スイッチ、ECUからの信号に基づいて、直進制動状態であるか否かを判定してもよい。また、直進制動状態以外の制動状態において、空気圧を低下させてもよい。
【図面の簡単な説明】
【0081】
【図1】本発明の第1実施形態に係る車両制御装置を搭載した車両の概略構成図である。
【図2】本発明の第1実施形態に係る車両制御装置を示すブロック構成図である。
【図3】Fr軸重、Rr軸重、及び車両安定化領域の関係を示すグラフである。
【図4】本発明の第1実施形態に係るECUで実行される制御の処理手順を示すフローチャートである。
【図5】本発明の第2実施形態に係る車両制御装置を示すブロック構成図である。
【図6】Fr重量配分、重心高さ、及び車両安定化領域の関係を示すグラフである。
【図7】左右軸重差、重心高さ、及び車両安定化領域の関係を示すグラフである。
【図8】直進制動時における車両の偏向状態を示す平面図である。
【図9】制動偏向の要因を示す図である。
【図10】車両感度の要因を示す図である。
【図11】左右軸重差がある場合に車両に作用する強制力を示す概略図である。
【図12】左右制動力差がある場合に車両に作用する強制力を示す概略図である。
【図13】横力がある場合に車両に作用する強制力を示す概略図である。
【符号の説明】
【0082】
10…車両、30,80…車両制御装置、40…ECU(制御手段)、42…直進制動判定部、44…軸重差制御部、46…制御部、50…エアバルブ、54A〜D…荷重センサ、70…燃料タンク、70A〜D…燃料室、74A〜D…燃料移送ポンプ、100…エンジンマウント、102…エアサスペンション、104…シートアクチュエータ。
【特許請求の範囲】
【請求項1】
車両直進中に制動操作された状態である直進制動状態における車両を制御する制御手段を備えた車両制御装置であって、
前記制御手段は、前記直進制動状態である場合に、左右輪の軸重の差である左右軸重差を減少させる軸重制御を実行することを特徴とする車両制御装置。
【請求項2】
前記制御手段は、前記軸重制御として、燃料タンクの左右方向の重量配分を変更することを特徴とする請求項1記載の車両制御装置。
【請求項3】
前記燃料タンクは、左右方向の異なる位置に設けられ、互いに連通可能且つ遮断可能とされた複数の燃料室を有し、
前記制御手段は、前記軸重制御として、前記燃料室内の燃料を移動させて、前記燃料タンクの左右方向の重量配分を変更することを特徴とする請求項2記載の車両制御装置。
【請求項4】
前記燃料タンクは、左右方向及び前後方向に対称に配置され、互いに均等である複数の前記燃料室を有することを特徴とする請求項3記載の車両制御装置。
【請求項5】
前記制御手段は、前記直進制動状態である場合に、タイヤ接地面から車両の重心までの高さである重心高さを低下させる重心高さ制御を実行することを特徴とする請求項1〜4の何れか一項に記載の車両制御装置。
【請求項6】
エンジンの車高方向の位置を制御するエンジン位置制御手段を更に備え、
前記制御手段は、前記重心高さ制御として、前記エンジン位置制御手段を用いて前記エンジンの車高方向の位置を低下させることを特徴とする請求項5記載の車両制御装置。
【請求項7】
前記エンジン位置制御手段は、液密構造を有し、前記エンジンを下方から支持するエンジンマウントを有し、
前記制御手段は、前記重心高さ制御として、前記エンジンマウント内の液体をエンジンマウント外に移動させて、前記エンジンの位置を低下させることを特徴とする請求項6記載の車両制御装置。
【請求項8】
車体の車高方向の位置を制御する車体位置制御手段を更に備え、
前記制御手段は、前記重心高さ制御として、前記車体位置制御手段を用いて前記車体の車高方向の位置を低下させることを特徴とする請求項5〜7の何れか一項に記載の車両制御装置。
【請求項9】
前記車体位置制御手段は、圧縮空気が封入された空気ばねを有するエアサスペンションを備え、
前記制御手段は、前記重心高さ制御として、前記エアサスペンションを用いて前記車体の車高方向の位置を低下させることを特徴とする請求項8記載の車両制御装置。
【請求項10】
前記車体位置制御手段は、タイヤ空気圧を低下させるタイヤ空気圧制御手段を有し、
前記制御手段は、前記重心高さ制御として、前記タイヤ空気圧制御手段を用いて前記タイヤ圧を低下させ、前記車体の車高方向の位置を低下させることを特徴とする請求項8又は9記載の車両制御装置。
【請求項11】
前記制御手段は、前記車両の前後方向の重量配分を変更する前後配分変更制御を実行することを特徴とする請求項1〜10の何れか一項に記載の車両制御装置。
【請求項12】
前記制御手段は、前記前後配分変更制御として、前記直進制動状態である場合に、燃料タンクの前後方向の重量配分を変更することを特徴とする請求項11記載の車両制御装置。
【請求項13】
座席を前後方向に移動させる座席駆動手段を更に備え、
前記制御手段は、前記前後配分変更制御として、前記座席が使用されていない場合に、前記座席駆動手段によって、前記座席を後方へ移動させることを特徴とする請求項12記載の車両制御装置。
【請求項14】
前記座席の背もたれを後方へ傾斜させる背もたれ駆動手段を更に備え、
前記制御手段は、前記前後配分変更制御として、前記座席が使用されていない場合に、前記背もたれ駆動手段によって、前記背もたれを後方へ傾斜させることを特徴とする請求項12又は13に記載の車両制御装置。
【請求項15】
前記左右輪の軸重を検出する複数の軸重検出手段を更に備え、
前記制御手段は、前記軸重検出手段によって検出された前記軸重に基づいて、前記左右軸重差を算出することを特徴とする請求項1〜14の何れか一項に記載の車両制御装置。
【請求項1】
車両直進中に制動操作された状態である直進制動状態における車両を制御する制御手段を備えた車両制御装置であって、
前記制御手段は、前記直進制動状態である場合に、左右輪の軸重の差である左右軸重差を減少させる軸重制御を実行することを特徴とする車両制御装置。
【請求項2】
前記制御手段は、前記軸重制御として、燃料タンクの左右方向の重量配分を変更することを特徴とする請求項1記載の車両制御装置。
【請求項3】
前記燃料タンクは、左右方向の異なる位置に設けられ、互いに連通可能且つ遮断可能とされた複数の燃料室を有し、
前記制御手段は、前記軸重制御として、前記燃料室内の燃料を移動させて、前記燃料タンクの左右方向の重量配分を変更することを特徴とする請求項2記載の車両制御装置。
【請求項4】
前記燃料タンクは、左右方向及び前後方向に対称に配置され、互いに均等である複数の前記燃料室を有することを特徴とする請求項3記載の車両制御装置。
【請求項5】
前記制御手段は、前記直進制動状態である場合に、タイヤ接地面から車両の重心までの高さである重心高さを低下させる重心高さ制御を実行することを特徴とする請求項1〜4の何れか一項に記載の車両制御装置。
【請求項6】
エンジンの車高方向の位置を制御するエンジン位置制御手段を更に備え、
前記制御手段は、前記重心高さ制御として、前記エンジン位置制御手段を用いて前記エンジンの車高方向の位置を低下させることを特徴とする請求項5記載の車両制御装置。
【請求項7】
前記エンジン位置制御手段は、液密構造を有し、前記エンジンを下方から支持するエンジンマウントを有し、
前記制御手段は、前記重心高さ制御として、前記エンジンマウント内の液体をエンジンマウント外に移動させて、前記エンジンの位置を低下させることを特徴とする請求項6記載の車両制御装置。
【請求項8】
車体の車高方向の位置を制御する車体位置制御手段を更に備え、
前記制御手段は、前記重心高さ制御として、前記車体位置制御手段を用いて前記車体の車高方向の位置を低下させることを特徴とする請求項5〜7の何れか一項に記載の車両制御装置。
【請求項9】
前記車体位置制御手段は、圧縮空気が封入された空気ばねを有するエアサスペンションを備え、
前記制御手段は、前記重心高さ制御として、前記エアサスペンションを用いて前記車体の車高方向の位置を低下させることを特徴とする請求項8記載の車両制御装置。
【請求項10】
前記車体位置制御手段は、タイヤ空気圧を低下させるタイヤ空気圧制御手段を有し、
前記制御手段は、前記重心高さ制御として、前記タイヤ空気圧制御手段を用いて前記タイヤ圧を低下させ、前記車体の車高方向の位置を低下させることを特徴とする請求項8又は9記載の車両制御装置。
【請求項11】
前記制御手段は、前記車両の前後方向の重量配分を変更する前後配分変更制御を実行することを特徴とする請求項1〜10の何れか一項に記載の車両制御装置。
【請求項12】
前記制御手段は、前記前後配分変更制御として、前記直進制動状態である場合に、燃料タンクの前後方向の重量配分を変更することを特徴とする請求項11記載の車両制御装置。
【請求項13】
座席を前後方向に移動させる座席駆動手段を更に備え、
前記制御手段は、前記前後配分変更制御として、前記座席が使用されていない場合に、前記座席駆動手段によって、前記座席を後方へ移動させることを特徴とする請求項12記載の車両制御装置。
【請求項14】
前記座席の背もたれを後方へ傾斜させる背もたれ駆動手段を更に備え、
前記制御手段は、前記前後配分変更制御として、前記座席が使用されていない場合に、前記背もたれ駆動手段によって、前記背もたれを後方へ傾斜させることを特徴とする請求項12又は13に記載の車両制御装置。
【請求項15】
前記左右輪の軸重を検出する複数の軸重検出手段を更に備え、
前記制御手段は、前記軸重検出手段によって検出された前記軸重に基づいて、前記左右軸重差を算出することを特徴とする請求項1〜14の何れか一項に記載の車両制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2009−184471(P2009−184471A)
【公開日】平成21年8月20日(2009.8.20)
【国際特許分類】
【出願番号】特願2008−25517(P2008−25517)
【出願日】平成20年2月5日(2008.2.5)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成21年8月20日(2009.8.20)
【国際特許分類】
【出願日】平成20年2月5日(2008.2.5)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]